Система навигации, слежения и направления для позиционирования операционных инструментов в теле пациента - RU2746458C2
Код документа: RU2746458C2
Чертежи

Описание
Настоящее изобретение относится к системе навигации, слежения и направления для позиционирования операционных инструментов в теле пациента, в которой в качестве интерфейса оператора используется дополненная реальность.
Предлагаемая система в частности подходит для таких применений, как рентгенодиагностика, онкологическая хирургическая радиология, сосудистая хирургическая радиология, процедуры, выполняемые путем введения зондов и/или игл (например, с целью биопсии и отсасывания жидкости), и нейрохирургия.
На сегодняшний день в области хирургии и хирургической навигации известно применение систем, использующих радиологические изображения и связывающих их с движением ультразвукового зонда.
Например, во время хирургической навигации этих видов используют системы, оснащенные компьютерными томографами (КТ), которые обеспечивают радиологические изображения в реальном времени и во время операции (интраоперационные компьютерные томограммы).
Существуют также другие известные системы, могущие обеспечить виртуальное отслеживание абляционных зондов, но не дающие информации, касающейся деформации.
С другой стороны, известно использование операционных очков, снабженных дисплеем для просмотра изображений. С этой целью в документе ЕР 2737868 А1 описана система, содержащая беспроводную хирургическую увеличительную линзу, которая позволяет пользователю, использующему беспроводную линзу во время выполнения процедуры, передавать информацию, полученную от беспроводной линзы, и просматривать на дисплее информацию о пациенте. Таким образом, передаваемая информация может использоваться для помощи при процедуре, проводимой в операционной, усовершенствования инструкций и записи для последующего использования.
Кроме того, в документе US 6,847,336 В1 описана система и способ отображения данных на полупрозрачном экране, установленном в нормальном поле зрения пользователя. Этот экран может быть установлен на голове пользователя или смонтирован на подвижной конструкции и расположен перед пользователем. На экране отображается пользовательский интерфейс, включая движущийся курсор и меню из пиктограмм управления компьютером. Рядом с пользователем устанавливается система слежения за глазами, используемая для управления движением курсора.
Кроме того, в документе US 7501995 B2 описана система и способ представления данных клинической поддержки, в которых используется навигация с помощью зрения.
Кроме того, в документе WO 2009083191 A1 описана система избирательного отображения, позволяющая выборочно отображать данные и информацию на устройстве отображения, установленном на очках.
С другой стороны, также известна реконструкция медицинских изображений посредством трехмерного отображения, при котором предусмотрено трехмерное отслеживание объема на пациенте и, возможно, также отслеживание иглы в различных областях медицинского и хирургического применения.
Например, документ US 5526812 A описывает систему отображения, позволяющую увеличивать и улучшать визуальное представление структур тела во время медицинских процедур.
Другие примеры систем и способов навигации в дополненной реальности в процедурах, связанных с медицинскими вмешательствами, описаны в документах US 7,774,044 В2, US 2002/0082498 А1 и US 2013/0267838 А1.
Несмотря на то, что все вышеперечисленные системы описывают различные способы помощи оператору во время операции, в случае минимально-инвазивных вмешательств все еще существуют некоторые ограничения.
Действительно, в случае минимально-инвазивных вмешательств предусмотрен ввод в тело пациента хирургических инструментов, т.е. зондов, делающих возможными операции без вскрытия тела пациента. Такие вмешательства сложны из-за трудностей с точной оценкой положения тканей, на которых необходимо проводить операцию, и вводимых инструментов. Из-за этой сложности при проведении операции часто возникают ошибки.
Эти системы сочетают использование ультразвука, характеризующегося низким пространственным разрешением, воспроизведение радиологических изображений, характеризующихся высоким разрешением, путем отслеживания ультразвукового зонда (зондов) для минимально-инвазивных вмешательств с помощью электромагнитных датчиков или оптических систем без пространственного разрешения или с низким пространственных разрешением.
В этом контексте техническая задача, лежащая в основе настоящего изобретения, заключается в том, чтобы предложить систему навигации, слежения и направления для позиционирования операционных инструментов в теле пациента, позволяющую преодолеть один или более вышеупомянутых недостатков известного уровня техники.
В частности, целью настоящего изобретения является создание системы навигации, слежения и направления для позиционирования операционных инструментов в теле пациента, в которой в качестве интерфейса оператора используется дополненная реальность, чтобы оператор мог оперировать пациента точным, надежным, безопасным и эффективным способом.
Преимущественно изобретение относится к системе и способу, который объединяет различные технологии, позволяющие в совокупности или в их комбинациях отображать на устройствах любого типа изображения, связанные с внутренними структурами тела пациента (биомедицинского, физиологического и патологического типа) и операционными инструментами, частично вводимыми в тело пациента, которые, если тело пациента не вскрыто, извне оператору не видны. Эти изображения в 2, 3 или 4 измерениях становятся видимыми для оператора в позициях, соответствующих реальному положению в пространстве структур, которые они отображают.
Предпочтительно в соответствии с изобретением визуальное отображение также относится к использованию, отслеживанию и позиционированию хирургических инструментов с особой фокусировкой на "нацеливание" на патологии в организме человека.
Таким образом, настоящее изобретение обеспечивает систему навигации, слежения и направления и соответствующий способ для позиционирования операционных инструментов в теле пациента, причем в качестве интерфейса оператора для просмотра в реальном времени операционного поля внутри тела пациента в точном фактическом наружном положении пациента используется дополненная реальность.
В соответствии с первым аспектом изобретения упомянутая техническая задача и указанные цели по существу достигнуты посредством системы навигации, слежения и направления для позиционирования операционных инструментов в теле пациента, имеющей технические признаки, изложенные в одном или нескольких пунктах прилагаемой формулы изобретения.
В частности данное изобретение обеспечивает систему навигации, слежения и направления для позиционирования операционных инструментов в теле пациента, содержащую:
- управляющее устройство, выполненное с возможностью приема множества данных, относящихся к внутреннему состоянию тела пациента;
- просмотровое устройство, выполненное так, что посредством указанного просмотрового устройства обеспечена возможность для оператора видеть по меньшей мере одну внутреннюю часть тела пациента; и
- первое средство обнаружения для определения пространственного положения просмотрового устройства.
Управляющее устройство выполнено с возможностью проецирования на просмотровом устройстве изображения внутреннего состояния внутренней части тела пациента, при этом изображение получено путем обработки множества данных на основе пространственного положения просмотрового устройства.
Предпочтительно система дополнительно содержит зонд, соединенный с операционным инструментом и выполненный с возможностью введения в часть тела пациента, причем зонд содержит по меньшей мере один световод, имеющий зоны дисперсии светового потока, генерируемого внутри световода, и средство обнаружения дисперсии светового потока, чтобы идентифицировать пространственное расположение зонда, введенного в тело пациента.
Предпочтительно управляющее устройство также выполнено с возможностью проецирования на просмотровом устройстве изображения зонда на основе идентифицированного пространственного расположения.
Зависимые пункты формулы изобретения, включенные в настоящий документ путем ссылки, соответствуют различным вариантам осуществления изобретения.
Во втором аспекте изобретения упомянутая техническая задача и указанные цели по существу достигнуты с помощью способа навигации, слежения и направления для позиционирования операционных инструментов в теле пациента, имеющего технические признаки, изложенные в одном или нескольких пунктах прилагаемой формулы изобретения.
В соответствии с изобретением способ содержит следующие этапы:
- обеспечение наличия просмотрового устройства, выполненного так, что посредством этого просмотрового устройства обеспечена возможность для оператора видеть по меньшей мере одну внутреннюю часть тела пациента (Р);
- обеспечение наличия первого средства обнаружения для определения пространственного положения просмотрового устройства;
обеспечение наличия управляющего устройства для выполнения следующих этапов:
- прием множества данных, относящихся к внутреннему состоянию тела пациента;
- обработка указанного множества данных на основе пространственного положения просмотрового устройства; и
- проецирование на просмотровом устройстве изображения внутреннего состояния по меньшей мере одной внутренней части тела пациента на основе осуществленной обработки.
Предпочтительно способ содержит следующие этапы:
- обеспечение наличия зонда, соединенного с операционным инструментом и выполненного с возможностью введения в часть тела пациента, причем зонд содержит по меньшей мере один световод, имеющий зоны дисперсии светового потока, генерируемого внутри световода, и средство обнаружения дисперсии светового потока для идентификации пространственного расположения зонда, введенного в тело пациента;
- кроме того, проецирование посредством управляющего устройства на просмотровом устройстве изображения зонда на основе идентифицированного пространственного расположения.
Зависимые пункты формулы изобретения, включенные в настоящий документ путем ссылки, соответствуют различным вариантам осуществления изобретения.
В третьем аспекте изобретения упомянутая техническая задача и указанные цели по существу достигнуты с помощью способа навигации, слежения и направления для позиционирования операционных инструментов в теле пациента, отличающегося тем, что его осуществляют посредством компьютера, как описано в прилагаемой формуле изобретения.
В четвертом аспекте изобретения упомянутая техническая задача и указанные цели по существу достигнуты с помощью компьютерной программы, отличающейся тем, что при выполнении этой программы на компьютере она выполняет этапы описанного способа.
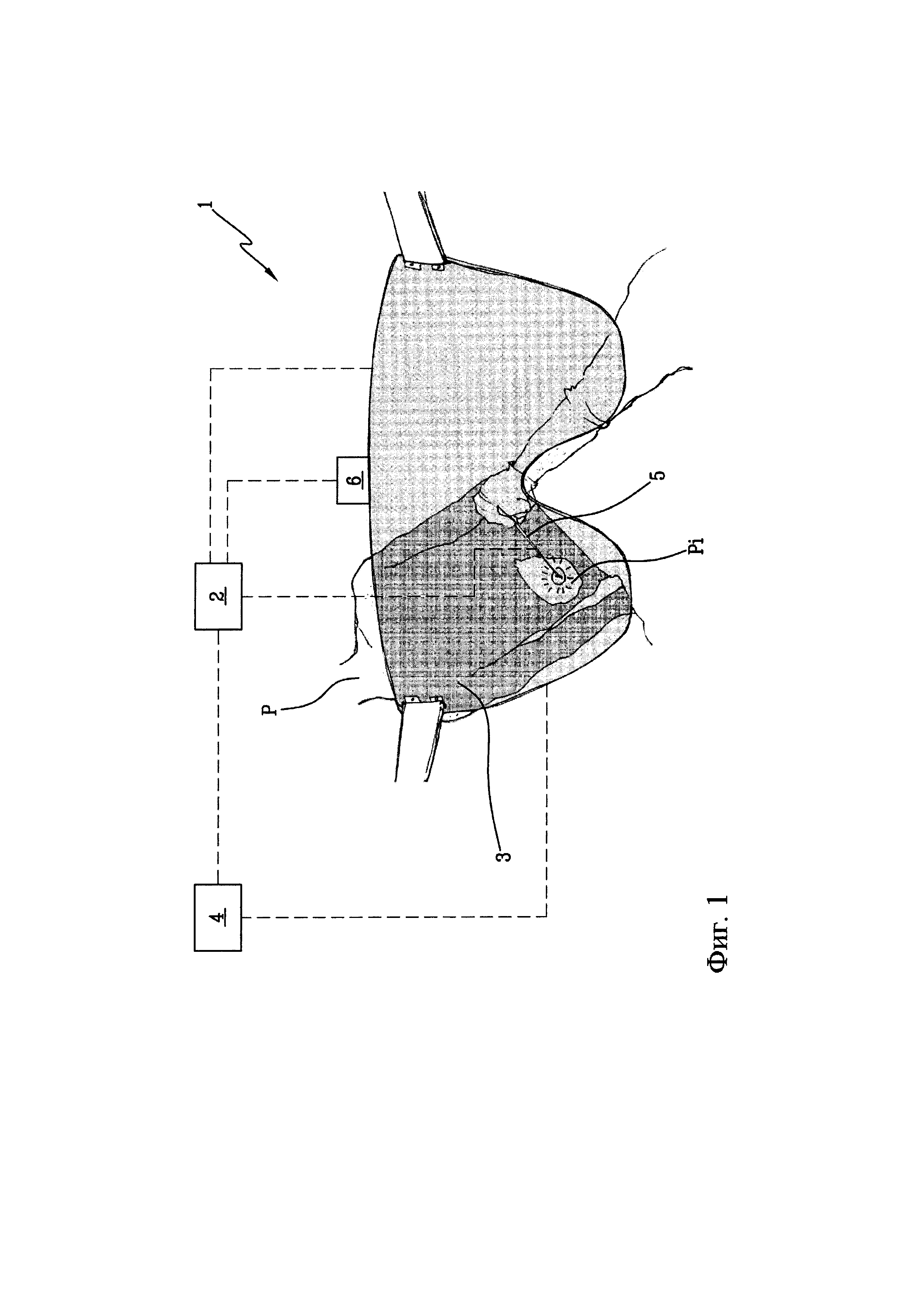
Дополнительные признаки и преимущества настоящего изобретения станут более понятными из примерного и, следовательно, не ограничивающего описания предпочтительного, но не исключительного варианта осуществления системы навигации, слежения и направления для позиционирования операционных инструментов в теле пациента, как показано на прилагаемом чертеже, причем фиг. 1 представляет собой перспективный схематический вид системы навигации, слежения и направления для позиционирования операционных инструментов в теле пациента в соответствии с настоящим изобретением во время рабочей конфигурации.
Со ссылкой на прилагаемые чертежи, номер позиции 1 обозначает в целом систему навигации, слежения и направления для позиционирования операционных инструментов в теле пациента, далее просто называемую системой 1.
Система 1 содержит управляющее устройство 2, выполненное с возможностью приема множества данных, относящихся к внутреннему состоянию тела пациента Р.
Предпочтительно множество данных, относящихся к внутреннему состоянию тела пациента Р, получают по меньшей мере посредством сканирования, например, облучения рентгеновскими лучами, МРТ (магнитно-резонансная томография), КТ (аксиальная компьютерная томография), ПЭТ-КТ (позитронно-эмиссионная компьютерная томография).
Сканирование может выполняться на месте или предварительно загружаться в управляющее устройство 2.
Система 1 содержит просмотровое устройство 3, выполненное так, что посредством просмотрового устройства 3 обеспечена возможность для оператора, который не показан, видеть по меньшей мере одну внутреннюю часть Pi тела пациента (Р).
Кроме того, система содержит первое средство 4 обнаружения для определения пространственного положения просмотрового устройства 3.
Управляющее устройство 2 выполнено с возможностью проецирования на просмотровом устройстве 3 изображения внутреннего состояния внутренней части Pi тела пациента Р, в частности изображение получается путем обработки множества данных на основе пространственного положения просмотрового устройства 3.
Другими словами, управляющее устройство 2 может проецировать на просмотровом устройстве 3 изображение в дополненной реальности внутренней части тела пациента Р, изменяющееся в зависимости от пространственного расположения просмотрового устройства 3.
Предпочтительно просмотровое устройство 3 расположено вдоль зрительной линии "оператор - часть тела пациента Р", чтобы обеспечить наилучшие эргономические условия для оператора и избежать любых проблем с координацией.
Предпочтительно согласно предпочтительному варианту осуществления настоящего изобретения, показанному на фиг. 1, просмотровое устройство 3 образовано просмотровым устройством, носимым оператором перед лицом (также называемым устанавливаемым на голове дисплеем (Head Mounted Display, HMD)), например, очками с по меньшей мере частично прозрачными линзами.
Предпочтительно просмотровое устройство 3 содержит гироскоп, компас и инерциальное измерительное устройство, преимущественно эти элементы позволяют корректно и точно идентифицировать пространственное положение просмотрового устройства 3.
Предпочтительно просмотровое устройство 3 также содержит датчик глубины, выполненный с возможностью записи восстановленного объема пациента, что предпочтительным образом позволяет оператору исследовать органы и патологии в теле пациента Р, одновременно наблюдая того же пациента Р.
Предпочтительно система 1 в соответствии с настоящим изобретением дополнительно содержит зонд, который не показан, соединенный с операционным инструментом 5 (т.е. вставленный внутрь) и выполненный с возможностью введения в часть Pi тела пациента Р.
Зонд содержит по меньшей мере один световод, который не показан, имеющий зоны дисперсии светового потока, генерируемого внутри световода, и средство обнаружения дисперсии светового потока, чтобы идентифицировать пространственное расположение зонда, введенного в тело пациента Р.
В сущности, управляющее устройство 2 также выполнено с возможностью проецирования на просмотровом устройстве 3 изображения зонда на основе идентифицированного пространственного расположения.
Таким образом, благодаря настоящему изобретению оператор может воспроизвести на просмотровом устройстве 3 то, что иначе не было бы видно невооруженным глазом. Действительно, управляющее устройство 2 передает в просмотровое устройство 3 изображение дополненной реальности, которое показывает не только внутреннее состояние тела пациента Р, но и движение зонда (и, следовательно, соединенного с ним операционного инструмента 5) во внутренней части Pi тела того же пациента Р.
Следовательно, реальное изображение пациента Р, видимое при помощи просмотрового устройства 3, накладывается на мнимое изображение, проецируемое с прозрачностью, и показывает органы и внутренние ткани пациента Р вместе с частью зонда, введенного в тело пациента Р, которые иначе не было бы видны.
Следовательно, благодаря настоящему изобретению оператор может работать на пораженном участке абсолютно безопасно и точно, без необходимости вскрывать тело пациента Р, чтобы отобразить рабочую область и положение/движение операционных инструментов 5.
Как сказано выше, чтобы идентифицировать пространственное расположение зонда, введенного в тело пациента Р, предусмотрен световод, в котором протекает световой поток. Путем модуляции и измерения потерь мощности оптического излучения, отраженного из-за областей дисперсии, с помощью управляющего устройства 2 можно определить и, следовательно, отобразить на просмотровом устройстве 3 положение зонда внутри пациента Р.
Следовательно, можно в реальном времени проконтролировать и отобразить правильность обращения с хирургическими инструментами 5, которые включают в себя зонды, являющиеся объектом настоящего изобретения, чтобы работать точно и надежно.
Другими словами, световод подвергнут микрообработке вдоль его центральной оси, чтобы потери мощности отражаемого оптического излучения могли изменяться в зависимости от существования и направления кривизны, испытываемой световодом.
Зоны дисперсии предпочтительно реализуют посредством процедуры микрообработки световода, заключающейся в прямом механическом истирании поверхностного слоя световода (также называемого "оболочкой"), чтобы локально уменьшить степень удержания света в сердцевине.
Благодаря части световода, подвергнутой избирательному удалению оболочки, свет, уже не ограничиваемый внутри сердцевины, может выходить наружу, что приводит к потере мощности отраженной волны.
Потери мощности оптического излучения возрастают или уменьшаются после положительной или отрицательной кривизны световода, поэтому оказывается, что потери мощности прямо пропорциональны кривизне чувствительной области (также называемой "сердцевиной") световода.
Итак, в соответствии с принципом работы настоящей системы 1 обеспечивается интеграция измерения изгиба зонда с данными о положении, получаемыми от первого средства 4 обнаружения для определения пространственного положения просмотрового устройства 3.
Согласно возможному варианту осуществления настоящего изобретения пространственная система отсчета реализуется с помощью шарнирного манипулятора с пятью степенями свободы, позволяющему обеспечить декартовы координаты X, Y, Z зонда относительно системы отсчета "операционное поле".
Предпочтительно зоны дисперсии образованы рядом первых зон дисперсии, последовательно расположенных вдоль по меньшей мере одной части указанного световода.
Предпочтительно зоны дисперсии, кроме того, образованы рядом вторых зон дисперсии, последовательно расположенных вдоль по меньшей мере одной части указанного световода и со смещением в радиальном направлении относительно центральной оси световода.
Благодаря расположению со смещением этих двух рядов зон дисперсии можно получить точную оценку пространственного расположения зонда.
Еще более предпочтительно вторые зоны дисперсии расположены под углом 90° относительно ряда первых зон дисперсии, измеренным относительно центральной оси световода.
Предпочтительно зонд содержит два параллельных световода, в которых ряд первых зон дисперсии и ряд вторых зон дисперсии соответственно образованы на одном из этих двух световодов.
Предпочтительно световод соединен с источником света, в частности с лазером, который не показан, и имеет отражающую стенку, расположенную на свободном конце, причем между лазером и отражающей стенкой расположен направленный ответвитель, соединенный с осциллографом.
Предпочтительно, закрывая свободный конец оптического волокна светоотражающим материалом, возможно осуществить отражение света в противоположном направлении.
Предпочтительно система содержит узел преобразования видеосигнала, который не показан, соединенный с управляющим устройством 2.
Предпочтительно узел преобразования видеосигнала содержит: по меньшей мере два конвертера VGA-HDMI, по меньшей мере один конвертер BNC-HDMI и по меньшей мере два порта HDMI. Более предпочтительно, конвертеры расположены в одном контейнере, а пять видеосигналов определяют вход "переключателя" и "преобразователя масштаба" с пятью входами и одним выходом HDMI. Видеосигналы принимаются переключателем и отправляются по стандарту HDMI в просмотровое устройство 3.
Видеосигналы передаются в просмотровое устройство 3 устройством зеркального отображения или кодером, в качестве альтернативы можно использовать локальный сервер.
Согласно возможному варианту осуществления настоящей системы предусмотрено, что видеосигналы могут быть выбраны оператором с помощью нажимного устройства, например, педали.
Педаль полезна с точки зрения эргономики во время операции, при которой врач/оператор должен смотреть на разные мониторы, как во время операции, так и во время диагностики, а также при прицеливании в области биопсии.
Предпочтительно система 1 содержит второе средство 6 обнаружения наружной поверхности тела пациента Р, которое не показано, соединенное с управляющим устройством 2 и содержащее, например, камеру или стереоскопическую камеру, предпочтительно составляющую одно целое с просмотровым устройством 3.
Предпочтительно второе средство 6 обнаружения наружной поверхности тела пациента Р делает возможным записывать операцию при осуществлении ее оператором. Кроме того, если это средство установлено на просмотровом устройстве 3, они особенно полезны как с точки зрения инструкций, потому что можно получить непосредственно точку клинического наблюдения, так и с точки зрения правовых аспектов, так как они записывают всю операцию.
Предпочтительно просмотровое устройство 3 содержит устройство передачи и приема данных, которое не показано, предпочтительно при помощи Wi-Fi, соединенное с первым средством обнаружения для определения пространственного положения просмотрового устройства 3 и/или соединенное со вторым средством 6 обнаружения наружной поверхности тела пациента Р.
Чтобы изображение дополненной реальности отображалось как можно точнее и в соответствии с реальным внутренним состоянием пациента Р, необходимо учитывать жизненно важные параметры пациента Р (дыхание, сердцебиение и т.п.). На самом деле, радиологические обследования могут обеспечить только статическое изображение внутренней части тела пациента Р.
Для этого необходимо идентифицировать изменение пространственной конфигурации внешней поверхности тела пациента Р, наблюдаемой оператором при помощи просмотрового устройства 3, чтобы получить корректное перекрытие/проекцию изображения, обработанного управляющим устройством 2, на реальном изображении пациента Р.
Изобретение предусматривает обеспечение второго средства 6 обнаружения наружной поверхности тела пациента Р, соединенного с управляющим устройством 2.
В частности изобретение предусматривает размещение по меньшей мере трех первых физических маркеров, подходящих для размещения на наружной поверхности части Pi тела пациента Р и обнаруживаемых самим вторым средством 6 обнаружения, обнаружение динамического позиционирования первых физических маркеров для передачи множества данных в управляющее устройство 2 и совмещение при помощи управляющего устройства 2 первых виртуальных маркеров изображения внутреннего состояния, спроецированного на просмотровом устройстве 3, с первыми физическими маркерами, расположенными на теле пациента Р.
Другими словами, второе средство 6 обнаружения наружной поверхности тела пациента Р содержит по меньшей мере три первых физических маркера (предпочтительно электромагнитных или оптических), которые не показаны, подходящих для размещения на наружной поверхности части Pi тела пациента Р и выполненных с возможностью обнаружения самим вторым средством 6 обнаружения. Второе средство 6 обнаружения наружной поверхности тела пациента Р обнаруживает динамическое позиционирование первых физических маркеров для передачи множества данных в управляющее устройство 2, предпочтительно выполненное с возможностью совмещения первых виртуальных маркеров изображения внутреннего состояния, спроецированного на просмотровом устройстве 3, с первыми физическими маркерами, расположенными на теле пациента 3.
Это делает возможным создание точного и качественного изображения дополненной реальности, мгновенно отражающего реальное внутреннее состояние пациента, при этом неподвижные изображения "корректируются" с учетом жизненно важных параметров пациента Р.
Изобретение предусматривает установку второго физического маркера, расположенного на зонде и пригодного для расположения вне тела пациента Р, а также для обнаружения физического положения второго маркера с использованием второго средства 6 обнаружения внешней поверхности тела пациента Р.
Другими словами, система 1 содержит второй физический маркер, расположенный на зонде и пригодный для расположения при применении вне тела пациента Р, причем второе средство 6 обнаружения наружной поверхности тела пациента Р также выполнено с возможностью обнаружения физического положения второго маркера.
Предпочтительно таким образом возможно точно идентифицировать позиционирование зонда в теле пациента Р и видеть его в дополненной реальности, проецируемой на просмотровом устройстве 3.
Здесь следует отметить, что пространственный ориентир может быть обеспечен фактом существования антропоморфного манипулятора, используемого оператором, тогда в этой конфигурации второй физический маркер может представлять дополнительную часть информации (по существу избыточную), но полезную для увеличения надежности системы в отношении рукоятки зонда.
Предпочтительно второе средство 6 обнаружения наружной поверхности тела пациента содержит по меньшей мере одно из следующих устройств: ультразвуковой преобразователь, инерциальное измерительное устройство и измерительный датчик, чтобы в реальном времени определять указанные жизненно важные параметры пациента.
В частности, измерительный датчик представляет собой систему, состоящую по меньшей мере из двух рычагов, соединенных посредством шарнира, движение которого определяется датчиком.
Концы этих двух рычагов закреплены на груди человека и, следовательно, движутся в соответствии с движением груди человека при дыхании. Таким образом, они показывают динамическую картину дыхательного цикла. Каждый момент этой картины будет сравниваться с выбранным в этот момент целевым положением, чтобы сопоставить каждую фазу дыхательного цикла, определенную таким образом, с положением шарнира.
Предпочтительно система 1 содержит датчик плотности внутренних тканей пациента Р, предпочтительно волоконно-оптический интерферометрический датчик с модуляцией поглощением.
Предпочтительно благодаря датчику плотности можно интегрировать множество определенных данных, а также определить степень так называемой "жесткости", что позволяет обеспечить параметры, характеризующие ткани, пересекаемые зондом.
Предпочтительно настоящая система 1 может быть успешно применена во время операции, перед операцией, или после операции. Действительно, система 1 позволяет оператору визуализировать перекрытие внутренних органов и патологий в трех измерениях, совмещая их с реальными анатомическими структурами.
Кроме того, настоящая система 1 позволяет отображать операционные инструменты внутри тела пациента Р и их деформацию из-за различных анатомических структур.
Ее можно использовать как для минимально-инвазивных процедур, так и для стандартных хирургических вмешательств. Единственное отличие заключается в том, что при минимально-инвазивных процедурах весь восстанавливаемый объем внутренней части тела пациента Р совмещается с телом пациента Р, в то время как во втором случае совмещение производится между определенной частью органа и той же частью органа в восстановленном объеме. Например, на фиг. 1 схематически показан реальный сегмент печени и его восстанавливаемый объем.
Система согласно настоящему изобретению имеет много преимуществ.
Что касается оператора, решение согласно изобретению позволяет наблюдать изображения в 2, 3 или 4 измерениях, точно в том месте, где расположена структура, к которой они относятся, и с высоким пространственным разрешением, а также увеличить разрешение, точность и распознавание правильного позиционирования операционных инструментов 5.
Кроме того, найденное решение позволяет обнаруживать положение и изгиб зондов и деформируемых инструментов.
В отличие от решений, используемых для решения тех же задач, настоящая система обеспечивает более высокую точность, даже без электромагнитных систем, при помощи механических систем и/или машинного зрения - вместе или по отдельности.
Система согласно настоящему изобретению может быть использована для подготовки или выполнения хирургического вмешательства, лапаротомии, эндоскопии или минимально-инвазивного вмешательства - чрескожного или чрескостного, или во время вмешательства при лапаротомии или эндоскопии. Кроме того, эта система подходит для проведения чрескожных диагностических процедур или диагностических процедур, проводимых под рентгенологическим контролем, таких как, например, биопсия или аспирация иглой.
Предпочтительно изобретение предусматривает, что этап обработки множества данных на основе пространственного положения просмотрового устройства 3 содержит обработку посредством сегментации органов и патологий.
Предпочтительно этап обработки содержит процесс трехмерного рендеринга изображений, полученных при радиологических обследованиях.
Изобретение также содержит создание трехмерного представления с патологией, сегментированной и отделенной от остальной части объема, в зависимости от осуществляемых сегментаций.
Изобретение дополнительно содержит этап проецирования на просмотровом устройстве 3 изображения внутреннего состояния по меньшей мере одной внутренней части Pi тела пациента Р в зависимости от выполняемой обработки, осуществляемый путем проецирования совместного визуального отображения органов и патологий.
В качестве альтернативы предпочтительно изобретение предусматривает, что этап обработки множества данных на основе пространственного положения просмотрового устройства 3 содержит обработку посредством сегментации органов и некроза, образовавшегося после лечения.
Изобретение также содержит создание трехмерного представления с патологией, сегментированной и отделенной от остальной части объема, в зависимости от осуществляемых сегментаций.
Предпочтительно этап обработки содержит процесс трехмерного рендеринга изображений, полученных при радиологических обследованиях.
Изобретение дополнительно содержит этап проецирования на просмотровом устройстве 3 изображения внутреннего состояния по меньшей мере одной внутренней части Pi тела пациента Р в зависимости от выполняемой обработки, осуществляемый путем проецирования совместного визуального отображения патологии и некроза.
Другими словами, в первом из этих двух вариантов изобретение предусматривает применение компьютерной программы, способной осуществить сегментацию органов и патологий (например, опухолей и т.п.) и трехмерный рендеринг изображений, полученных при радиологических обследованиях. Кроме того, программное обеспечение также может сравнивать трехмерный рендеринг изображений, полученных при разных исследованиях. Она состоит из программных кодов, которые включают в себя алгоритмы сегментации.
В частности, программа представляет собой веб-приложение, которое может принимать изображения от разных радиологических обследований (MPT, КТ, ПЭТ-КТ) и преобразовывать их в трехмерное представление с патологией, сегментированной и отделенной от остальной части объема (например, с помощью другого цвета). Сегментация полностью автоматическая, то есть она происходит без вмешательства пользователя, и не требует никакой коррекции.
Кроме того, во втором из двух вариантов осуществления программа также определяет, было ли лечение успешным или нет. Действительно, благодаря применению этого программного обеспечения органы и некроз, образовавшийся после лечения, на изображениях сегментируются (ПЭТ-КТ, МРТ и КТ), объем регистрируется до лечения и после лечения, и выполняется совместное визуальное представление патологии и некроза.
Программа предусматривает получение запроса на обработку изображения внутренней части Pi тела пациента Р и передачу в управляющее устройство 2 данных, репрезентативных для запроса.
Другими словами, веб-клиент запрашивает выполнение скрипта, скрипт помещается в планировщик, который будет управлять очередью или порядком скрипта, который будет выполняться на сервере, и, как только планировщик даст разрешение, сервер обработает файлы с требуемым скриптом и запишет файлы в совместно используемое запоминающее устройство.
Программа предусматривает получение изображение зонда, как определено выше, и отображение этого изображения.
Другими словами, веб-клиент найдет сгенерированные файлы или запрошенные слои и будет просматривать их при помощи просмотрового устройства 3, в частности при помощи устанавливаемого на голове дисплея.
Другой вариант осуществления изобретения содержит регистрацию восстановленного объема тела пациента с использованием датчика глубины. Предпочтительно этот датчик позволяет оператору исследовать органы и патологии в теле пациента Р, одновременно наблюдая того же пациента Р.
Это представляет собой второе решение компьютерной программы, основанной на соответствующих средствах, приспособленных для реализации так называемого "машинного зрения".
Это второе решение предусматривает применение датчиков глубины и стереоскопической камеры, вместе или отдельно, таким образом, чтобы совместить два объема. Вышеупомянутая камера применяется как при распознавании с применением дополненной реальности, так и для создания "карты несоответствия", позволяющей получить больше информации о глубине сцены; по этой второй причине камера должна также обеспечивать возможность регулировки межзрачкового расстояния, чтобы в этом случае работать с разными диапазонами глубины (например, с двумя/тремя фиксированными предварительными установками для большей дальности и дающей большую точность меньшей дальности).
Следует отметить, что для определения карты глубин сцены может быть достаточно одного только датчика глубины, что делает ненужным расчет карты несоответствия с использованием стереоскопической камеры, но, учитывая, что этот тип датчиков часто восприимчив к сильному свету и источникам инфракрасного излучения, могущим помешать считыванию, в некоторых случаях может потребоваться, интегрировать обе технологии, чтобы получить более точное соответствие между реальностью и дополненной реальностью.
Выше была описана система навигации, слежения и направления для позиционирования операционных инструментов в теле пациента, в которой в качестве интерфейса оператора используется дополненная реальность, чтобы оператор мог оперировать пациента точным, надежным, безопасным и эффективным способом.
Реферат
Группа изобретений относится к медицине. Система навигации, слежения и направления для позиционирования операционных инструментов в теле пациента содержит управляющее устройство, просмотровое устройство и первое средство обнаружения для определения пространственного положения просмотрового устройства. Система дополнительно содержит зонд, соединенный с операционным инструментом и выполненный с возможностью введения во внутреннюю часть тела пациента. Зонд содержит по меньшей мере один световод, имеющий зоны дисперсии светового потока, генерируемого внутри световода, и средство обнаружения для обнаружения дисперсии светового потока, чтобы идентифицировать пространственное расположение зонда, введенного в тело пациента. Управляющее устройство выполнено с возможностью проецирования на просмотровом устройстве изображения внутреннего состояния по меньшей мере одной внутренней части тела пациента и изображения зонда на основе идентифицированного пространственного расположения. Носитель данных, содержит компьютерную программу, при выполнении на компьютере осуществляющую этапы способа. Применение данной группы изобретений позволит оператору оперировать пациента точным, надежным, безопасным способом. 3 н. и 24 з.п. ф-лы, 2 ил.
Комментарии