Устройство для подвода питающих кабелей к подвижному объекту - SU576035A3
Код документа: SU576035A3
Чертежи





Описание
УСТРОЙСТВО для ПОДВОДА ПИТАЮЩИХ КАБЕЛЕЙ
(54) К ПОДВИЖНОМУ ОБЪЕКТУ


Реферат
Формула
Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам для
подвода гибкого энергоноопеля к подвижному объекту, например грузовой тележке крана.
Извесгно устройство для подвода питающих кабелей к подвижному объекту, например грузовой
тележке крана, содержащее две параллельные пластинчатые цепи, соед1шенные стержнями с отверстиями
для питающих кабелей, причем один конед цепей соединен с подвижным объектом, а щ)угои
со стафюнарным пунктом питания 1
Недостатком известного устройства является
уравнительно небольшое допустимое расстояние между подвижным объектом и стацнонарньш пунктом питания.
Известно также устройство для подвода питающих кабелей к подвижному объекту, например
грузовой тележке крана, содержащее две параллельные пластинчатые цепи, соединенные стержнями
с отверстиями дан питающих кабелей, причем один конец цепей соединен с подвижным объектом,
другой - со стационарным пунктом питания, расположенном на уровне, отличном от уровня перемещения
объекта; на нижнем уровне вдоль пути расположена направляющая для цепей, находящихся на нижнем уровне, а на верхнем уровне - узлы поддержки цепей, расположенных на верхнем уровне (2.
У этого устройства тот же недостаток, что у предыдущего.
Цель изобретения - расширение зоны перемещения подвижного объекта за счет увеличения
допустимого расстояния между ним и стационарным пунктом питания - достигается i&t, что узлы
поддержки цепей (жабжены подвижными захватами с приводом, опорами и датчиками управления захватами
, причем захваты установлены на опорах попарто и выполнены в виде двуплечего рычага,
закрепленного на оси, верхний конец которого
связан с приводом, а нижний снабжен уголком,
расположенным в зоне перемещения цепей.
Устройство может быть яа5жто коммут1фух щим
полозом с криволинейной направляющей, подпружиненной штангой с роликом, зубчатой рейкой,
валом с щестерней и криволиМейныьш направляющими , а также цапфой с роликом, причем цшфа с
роликом может быть установлена & коивоАннейной направляющей вала и укреплена в верхней части
захвата, коммутирующий полоз закреплен на осина
опоре между захватами и связан с роликом подпружинеиной
штанги, которая соединена с зубчатой рейкой, связанной с шестерней вала.
Устройство может быть снабжено коммутирующим клананом, цилиндром и установкой сжатого
воздуха, причем ци;1индр и коммутирующий клапан устанавливают между захватами.
Уст{)ойс-тно может быть снабжено электрическими выключателями и злектромагнитами с тягами,
причем тяги электромагнитов связывают с захватами , а электрический выключатель располагают в
зоне перемещения пеней.
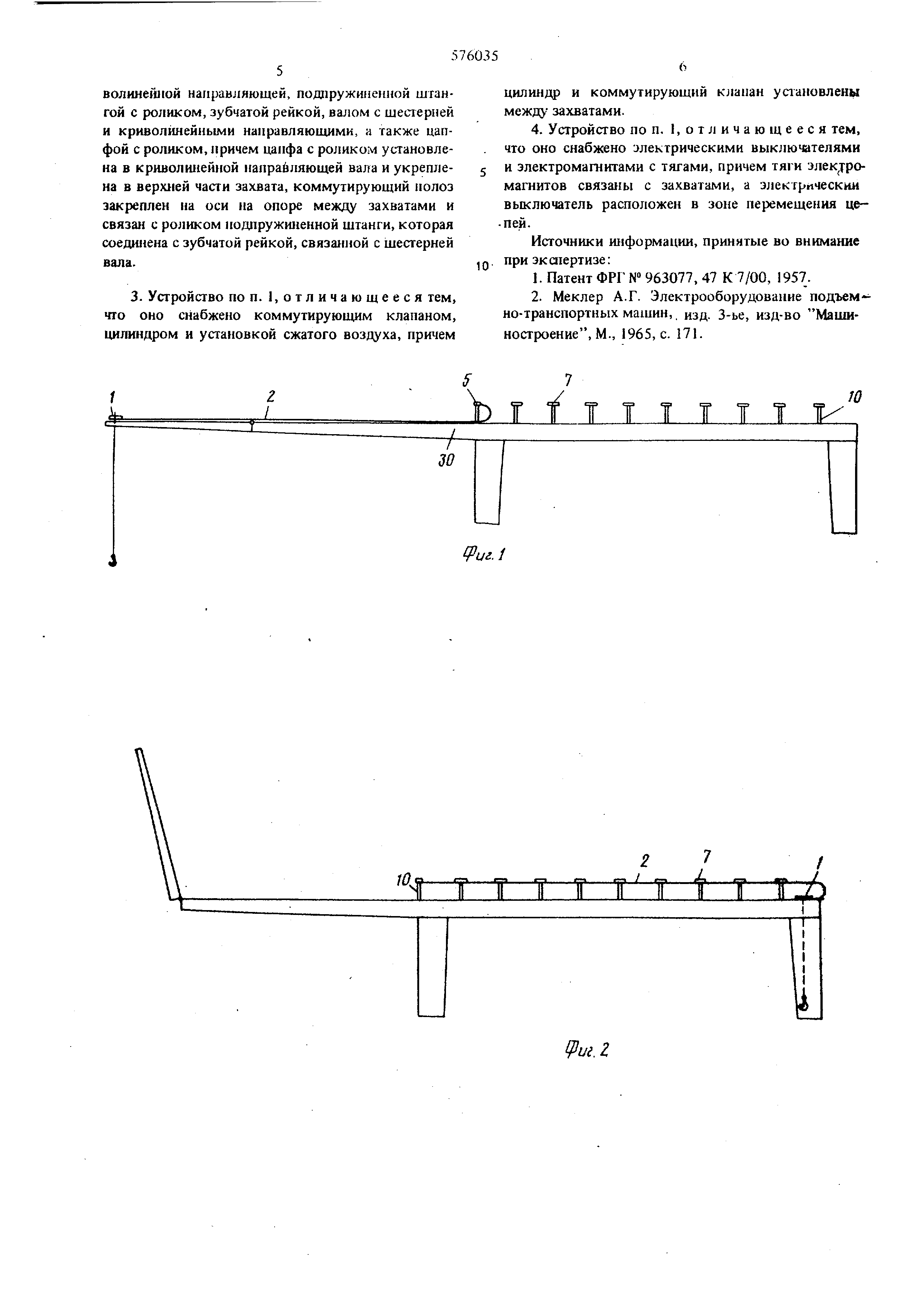
Па фиг. I, 2 изображен общий вид устройства
при двух крайних ноложениях объекта; на фиг. 3 - вид на онору и механический привод захватов;
на фиг. 4 -- разрез по А-А на фиг. 3; на фиг. 5 -- вид сверху на онору и меха)Н1ческий привод
захватов; на фиг. 6 -- разрез по Б-Б на фиг. 5; на фиг. 7 - пневматический привод захватов, на фиг. 8
- электромагнитный привод захватов; на фиг. 9 - электоическигй выключате; Ь.
Устройство для нодвода питающих кабелей к объекту I, например 1рузоБой тележке крана, содержит
дне параллелы1ые пластинчатые нени 2, соединенные 3 с отверстиями для питающих
кабелей 4. Один конец ценей соединен с объектом I, а другой - со сгадаонарньгм пунктом 5
питания, расположенном на уровне, отличном от уровня перемещения объекта. На нижнем уровне
вдоль пути расположена направляющая 6 /шя цепей, находяодихся внизу, а на верхнем уровне узлы 7
поддержки цепей, расположенных наверху.
Узлы 7 поддержки цепей снабжены подвижными
захватами 8 с приводом 9, опорами 10 и датчиками 11 управления захватами. Захваты, установленные
на опорах 10 ггонарно, выполнены в виде двуплечего рычага, закрепленного на оси 12, верхний
конец которого связан с приводом 9, а нижний снабжен уголком 13, расположенным в зоне перемещения цепей.
Устройство может быть снабжено коммутирующим полозом 14 с криволинейной направляющей,
подпружиненной щтангой 15 с роликом 16, зубчатой рейкой 17,- валом 18 с щестерней 19 и криволинейными
направляюащми 20, а также цапфой 21 с роликом 22, причем цапфу 21 с роликом 22 устанавливают
в направляющей 20 и укрепляют в верхней части захвата 8, коммутирующий полоз 14 закрепляют
на оси 23 на опоре 10 между захватами и связывают с роликом 16 щтанги 15, которую соединяют
с рейкой 17, связанной с щестерней 19 вала 18.
Устройство может быть снабжено коммутирующим клапаном 24, Щ1линдром 25 и установкой 26
сжатого воздуха, причем цилиндр 25 и клапан 24 устанавливают между захватами.8.
Устройство может быть снабжено электрическими выключателями 27 и электромагнитами 28 с
тягами 29, причем тяги электромагнитов связывают С захватами 8, а выключатель 27 располагают в зоне
перемещения цепей.
Объект, например грузовая тележка, может
перемещаться вдоль, например, эстакада 30.
Устройство работает следующим образом.
Объект I .может перемещаться вдоль зсгакады 30. При этом цепи 2 с кабелями 4 перемещаются
вдоль направляющих 6 и узлов 7 поддержки цегКй.
В случае привода 9 полоз 14 располагается в
зоне перемещения цепей; при этом захваты 8 раскрыты . Как только полоз 14 приподнимается
стержнями 3 цепей, перемещаются щтанги 15, и рейка 17 через щестерню 19 и вал 18 поворачивает
захваты 8 в направляющих 20; при этом уголки 13 захватов 8 подхватывают цепи снизу. После освобождения
полоза 14 от давления со стороны стержней 3 щтанги 15 возвращают захваты в исходное положение.
В случае пневматического привода устройство снабжают клапаном 24, который управляется датчиком
11, расположенным в зоне перемещения цепей. При воздействии на датчик 11 стержней 3 цепей
2 воздух под давлением поступает в цилиндр 25, в результате чего захват 8 подхватывает
цепи снизу. После окончания воздействия стержней 3 на датчик 11 воздух из цилиндра 25 выпускается
, и захваты раскрываются.
В случае электромагнитного привода устройство
снабжают выключателями 27, располагаемыми в зоне неремещения цепей. При срабатывании выключателя
27 от стержня 3 цепей 2 электромагнит 28 теряет питание; при этом перемещаются тяги 29, и
захваты 8 подхватывают цепи.
Таким образом, указанная к-онструкция узлов
7 поддержки цепей 2 с кабелями 4 позволяет расширить зону перемещения объекта.
Формула изобретения
1.Устройство для подвода питающих кабелей к
подвижному объекту, например грузовой тележке
крана, содержащее две параллельные пластинчатые
цепи, соединенные стержнями с отверстиями для питающих кабелей, причем один конец цепей соединен
с подвижным объектом, а другой - со стационарным пунктом питания, расположенном на уровне
, отличном от уровня перемещения объекта, при
этом на нижнем уровне вдоль пути расположена
направляющая для цепей, находящихся на нижнем
уровне, а на верхнем уровне - узлы поддержки
цепей, расположе}щых на верхнем уровне, о т л ичающееся тем, что, с целью раалирения зоны
перемеп1ения объекта, узлы поддержки цепей снабжены подвижными захватами с приводом, опорами
и датчиками управления захватами, причем з.ахваты установлены на опорах попарно и выполнены в виде
двуплечего pbijgra, закрепленного на оси, верхний конец которого связан с приводом, а нижний
снабжен уголком, расположенным в зоне перемещен tw цепей.
2.Устройство по п. 1, о т л и ч а ю щ е е с я тем, что оно снабжено коммутирующим полозом с криволинешюй направляющей, подпружиненной штангой с роликом, зубчатой рейкой, валом с шестерней
и криволинейными направляющими, а также цапфой с роликом, причем цапфа с роликом установлена
в криволинейной направляющей ваяа и укреплена в верхней части захвата, коммутирующий полоз
закреплен на оси на опоре между захватами и связан с роликом подпружиненной штанги, которая
соединена с зубчатой рейкой, связа пюй с шестерней вала.
3. Устройство по п. 1, отличающееся тем, что оно снабжено коммутирующим клапаном,
цилиндром и установкой сжатого воздуха, причем
цилиндр и коммутирующий клапан уаановлены
между захватами.
4. Устройство поп. I, о т л и ч а ю щ е е с я тем,
что оно снабжено электрическими выключателями и электромагнитами с тягами, причем тяги элек ромагнитов
связаны с захватами, а электрический выключатель расположен в зоне перемещения це- -пей.
Источники информации, принятые во внимание при экшертизе:
1.Патент ФРГ № 963077, 47 К 7/00, 1957.
2.Меклер А.Г. Электрооборудование подъемно-транспортных
машин, изд. 3-ье, изд-во Машиностроение , М., 1965, с. 171.
Ostчр-ч -ч
L/р m1
i I II
27
„ „ f „ L
« Фиг.
З
РигЛ
О
ICi
гч M т л I
db :/±ttifc«: W:i I
lgl Ч/ и V 1/ V V V I I
ooooo
//////4r
OOOOO
/
13
10
ТГ-Г
««. 7
29 29
Ф
г«
Фиг.в
Комментарии