Оптическая система с регулируемыми каскадами для офтальмологического лазерного скальпеля - RU2569129C2
Код документа: RU2569129C2
Чертежи












Описание
Область техники, к которой относится изобретение
Этот патентный документ относится к системам и технологиям для проведения лазерной хирургии для переднего сегмента глаза.
Уровень техники
При проведении лазерной хирургии через фотопробу, вызываемой посредством лазерных импульсов, могут быть использованы различные хирургические операции на хрусталике глаза для того, чтобы удалять хрусталик глаза. Эти операции могут разделять хрусталик глаза на небольшие фрагменты и удалять фрагменты из глаза через небольшие надрезы. Ручные инструменты, ультразвук, нагретые жидкости или лазеры могут быть использованы в таких операциях.
Сущность изобретения
Этот патентный документ описывает примеры и реализации систем и технологий для обеспечения регулируемого управления сканированием при доставке лазерного луча лазерных импульсов в хирургическую цель. Описанные системы и технологии могут использоваться для лазерной хирургии в переднем сегменте глаза и хрусталика глаза через фотопробу, вызываемый посредством лазерных импульсов из фемтосекундного лазера. Описанные системы и технологии могут быть реализованы способами, которые предоставляют оптическое сканирование лазерного луча, чтобы уменьшать или минимизировать оптические искажения лазерного луча во время сканирования и фокусировки лазерного луча в глаз.
Например, офтальмологическая лазерная система может быть реализована как включающая в себя лазерный источник, который формирует лазерный луч из лазерных импульсов; XY-сканер, который сканирует лазерный луч в направлениях, поперечных к оси Z; Z-сканер, который сканирует лазерный луч вдоль оси Z и включает в себя непрерывный Z-сканер, который предоставляет непрерывное сканирование лазерного луча вдоль оси Z; и инкрементный Z-сканер, который предоставляет инкрементное сканирование лазерного луча вдоль оси Z.
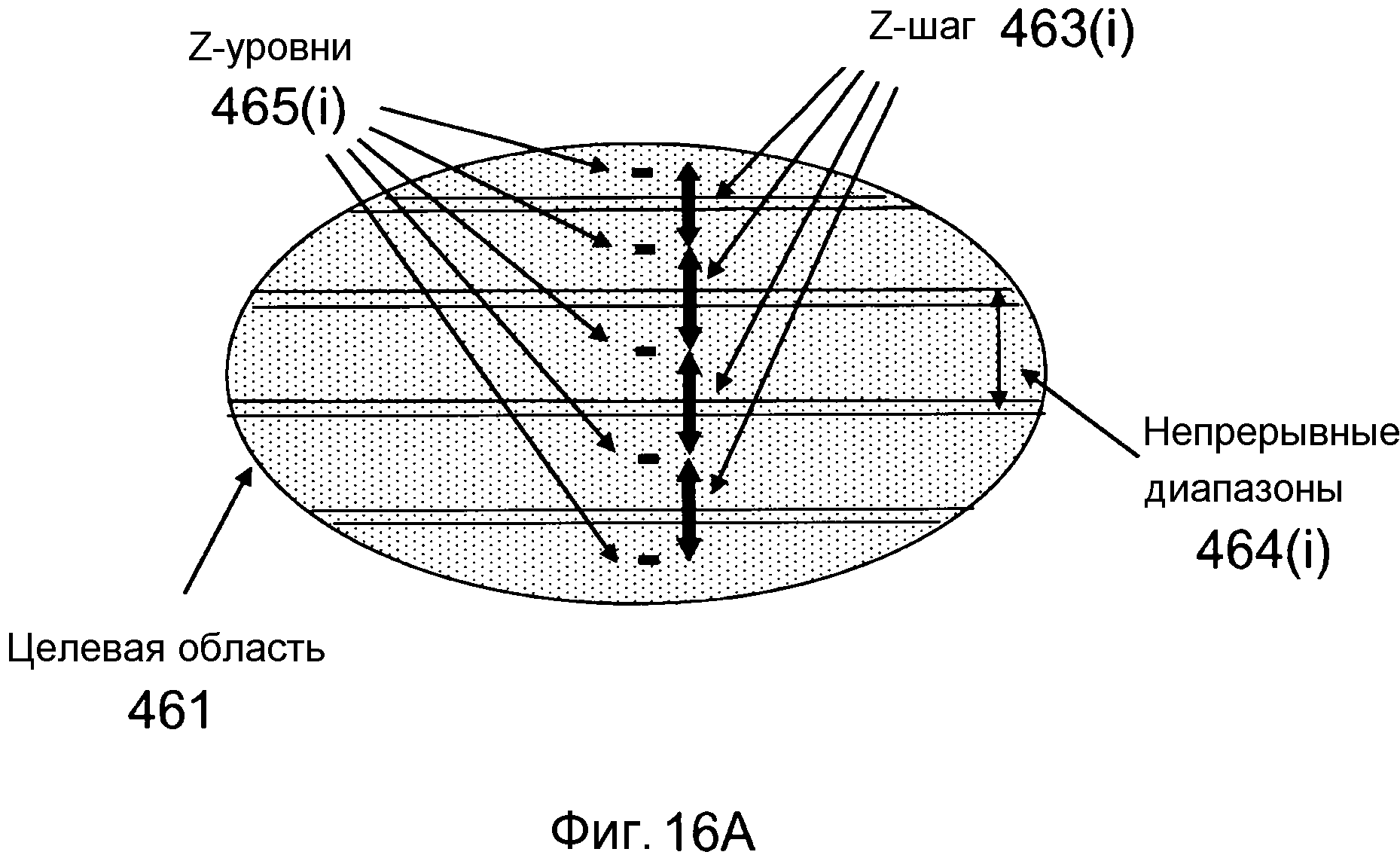
В вариантах осуществления, инкрементный Z-сканер выполнен с возможностью Z-сканирования глубины фокуса офтальмологической лазерной системы инкрементно посредством Z-шагов, и непрерывный Z-сканер выполнен с возможностью Z-сканирования глубины фокуса офтальмологической лазерной системы непрерывно в диапазонах непрерывного сканирования, соответствующих Z-шагам.
В вариантах осуществления, Z-сканер конфигурируется так, что диапазоны непрерывного сканирования превышают один или более Z-шагов, тем самым диапазоны непрерывного сканирования, в которых глубина фокуса может быть Z-сканирована с помощью непрерывного Z-сканера в соседних Z-шагах, перекрываются, и оператор офтальмологической лазерной системы допускает Z-сканирование глубины фокуса в диапазоне квазинепрерывного Z-сканирования.
В вариантах осуществления, общий диапазон Z-сканирования имеет длину в одном из диапазонов 0-5 мм, 5-10 мм, 10-30 мм и 0-15 мм.
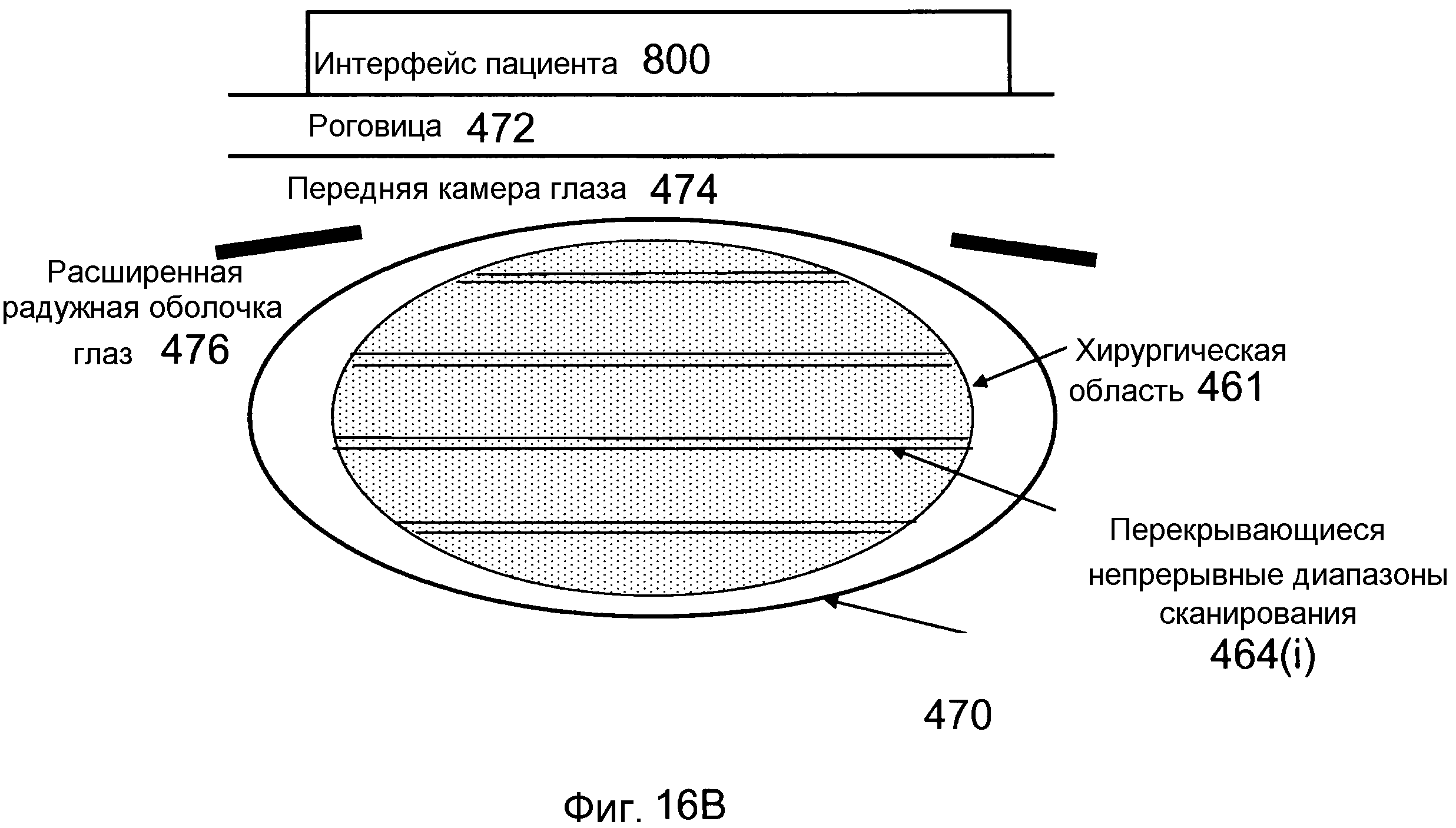
В вариантах осуществления, инкрементный Z-сканер допускает перевод глубины фокуса на Z-уровень роговицы, позволяя хирургу выполнять операцию на роговице глаза в диапазоне непрерывного сканирования около Z-уровня роговицы, и на один или более Z-уровней хрусталика глаза, позволяя хирургу выполнять операцию на хрусталике глаза в диапазонах непрерывного сканирования вокруг одного или более Z-уровней хрусталика глаза.
В вариантах осуществления, Z-сканер выполнен с возможностью поддерживать аберрацию лазерного луча лучше порогового значения в целевой области.
В вариантах осуществления, аберрация офтальмологической лазерной системы может отличаться посредством коэффициента S Штреля, и коэффициент S Штреля выше порогового значения S(threshold) в целевой области, при этом S(threshold) имеет одно из значений 0,6, 0,7, 0,8 и 0,9.
В вариантах осуществления, коэффициент S Штреля соответствует лазерному лучу с длиной волны в пределах 0,4-1,1 микрона.
В вариантах осуществления, коэффициент S Штреля выше S(threshold) в одной или более из пяти опорных точек в целевой области, при этом пять опорных точек определяются посредством цилиндрических координат (z, r) в целевой области как Р1=(0,0), Р2=(2,6), Р3=(5,0), Р4=(8,0), Р5=(8,3), в миллиметрах, под любым азимутальным углом ϕ, относительно передней стороны и центра целевой области в (0,0).
В вариантах осуществления, аберрация офтальмологической лазерной системы может отличаться посредством радиуса rfфокального пятна, и радиус rf фокального пятна меньше порогового значения rf(threshold) в целевой области, при этом rf(threshold) составляет одно из 2, 3, 4, 5 и 6 микрометров.
В вариантах осуществления, радиус rf фокального пятнаменьше rf(threshold) в одной или более из пяти опорных точек в целевой области, при этом пять опорных точек определяются посредством цилиндрических координат (z, r) в целевой области как P1=(0,0), P2=(2,6), P3=(5,0), P4=(8,0), P5=(8,3), в миллиметрах, под любым азимутальным углом ϕ, относительно передней стороны и центра целевой области в (0,0).
В вариантах осуществления, аберрация является одной из сферической аберрации, комы, астигматизма и хроматической аберрации.
В вариантах осуществления, Z-сканер выполнен с возможностью, по меньшей мере, частично компенсировать аберрацию, вызываемую посредством Z-сканирования посредством Z-сканера глубины фокуса офтальмологической системы в целевой области.
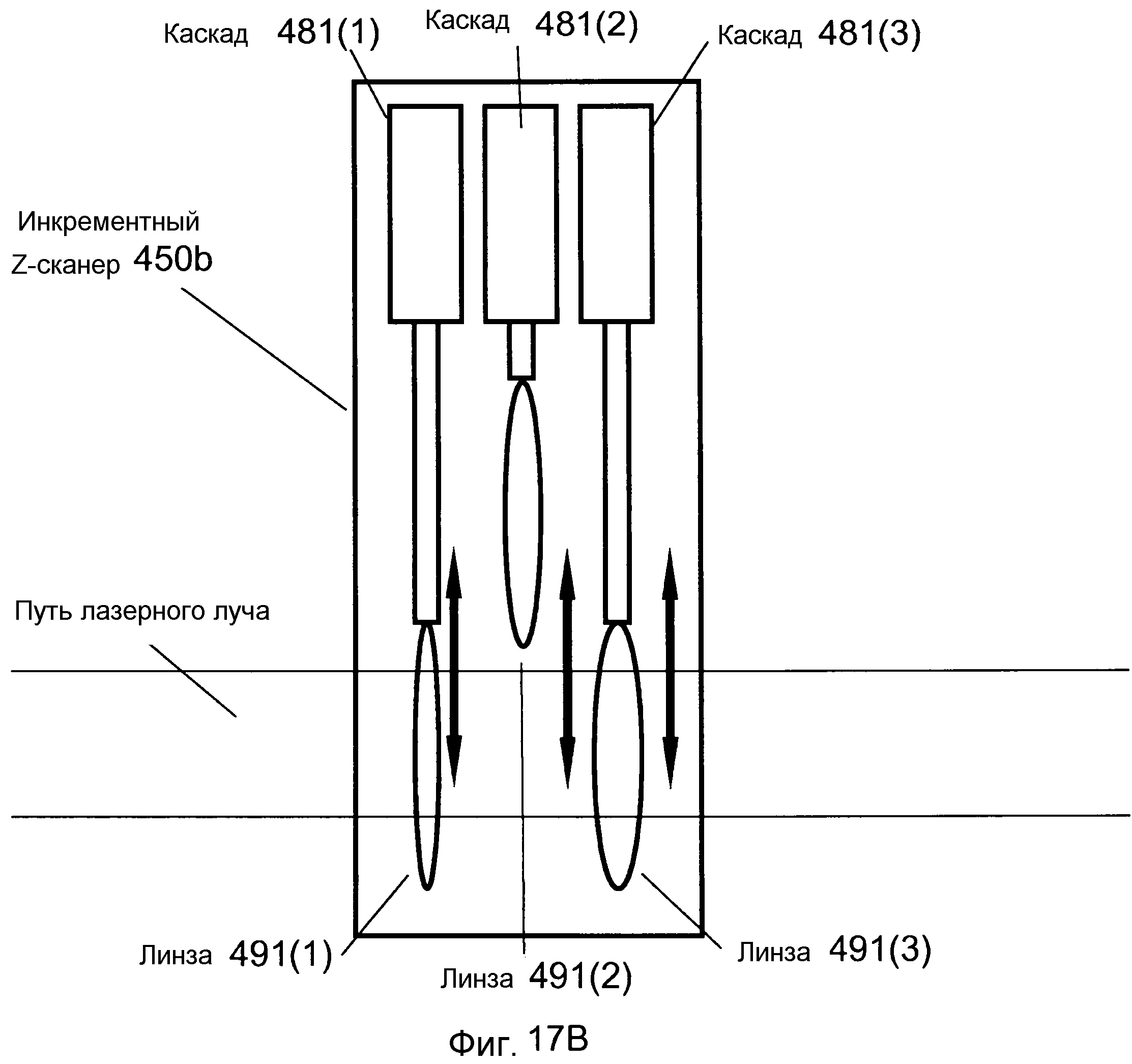
В вариантах осуществления, инкрементный Z-сканер имеет один или более регулируемых каскадов, при этом регулируемые каскады могут быть размещены в и вне пути лазерного луча.
В вариантах осуществления, регулируемые каскады могут быть размещены в последовательности конфигураций, которые перемещают глубину фокуса лазерного луча с предварительно определенными Z-шагами.
В вариантах осуществления, различные регулируемые каскады выполнены с возможностью перемещать глубину фокуса пропорционально длине базового Z-шага, умноженной на различные степени 2.
В вариантах осуществления, число регулируемых каскадов составляет одно из одного, двух, трех и четырех.
В вариантах осуществления, аберрация, вызываемая посредством регулируемого каскада, компенсируется, по меньшей мере, частично посредством регулируемого каскада, содержащего функциональную мультиплетную линзу.
В вариантах осуществления, аберрация, вызываемая посредством регулируемого каскада, компенсируется, по меньшей мере, частично посредством регулируемого каскада, содержащего синглетную линзу с параметром изгиба, отличающимся от нуля.
В вариантах осуществления, регулируемый каскад может перемещаться в пути лазерного луча посредством механического ползунка, механического актуатора, поворотного рычага и электромеханической аппаратной системы.
В вариантах осуществления, непрерывный Z-сканер выполнен с возможностью сканировать глубину фокуса лазерного луча в предварительно определенных диапазонах непрерывного сканирования, когда различные регулируемые каскады размещаются в пути лазерного луча, при этом предварительно определенные непрерывные диапазоны либо отличаются для различных регулируемых каскадов, либо являются идентичными для различных регулируемых каскадов.
В вариантах осуществления, непрерывный Z-сканер размещается между лазерным источником и XY-сканером, и инкрементный Z-сканер размещается после XY-сканера в пути лазерного луча.
В вариантах осуществления, непрерывный Z-сканер размещается после XY-сканера в пути лазерного луча.
В вариантах осуществления, непрерывный Z-сканер содержит первый блок, размещенный между лазерным источником и XY-сканером, и второй блок, размещенный после XY-сканера в пути лазерного луча.
В вариантах осуществления, Z-сканер выполнен с возможностью варьировать глубину Z-фокуса и числовую апертуру лазерного луча по существу независимо друг от друга.
В вариантах осуществления, Z-сканер размещается в отдельном корпусе от объектива и перед объективом в пути лазерного луча.
В вариантах осуществления, способ включает в себя этапы формирования лазерного луча посредством лазерного источника, Z-сканирования глубины фокуса лазерного луча посредством непрерывного Z-сканера и Z-сканирования глубины фокуса лазерного луча посредством инкрементного Z-сканера.
В вариантах осуществления, Z-сканирование посредством инкрементного Z-сканера включает в себя Z-сканирование глубины фокуса с инкрементными Z-шагами, и Z-сканирование посредством непрерывного Z-сканера содержит Z-сканирование глубины фокуса в диапазонах непрерывного сканирования, соответствующих инкрементным Z-шагам.
В вариантах осуществления, один или более диапазонов непрерывного сканирования превышают Z-шаги, тем самым диапазоны непрерывного сканирования, в которых глубина фокуса может быть Z-сканирована с помощью непрерывного Z-сканера в соседних Z-шагах, перекрываются, и оператор офтальмологической лазерной системы допускает Z-сканирование глубины фокуса в диапазоне квазинепрерывного Z-сканирования.
Некоторые варианты осуществления включают в себя этапы перевода инкрементного Z-сканера на Z-уровень роговицы, выполнения хирургической операции на роговице посредством Z-сканирования глубины фокуса с помощью непрерывного Z-сканера, перевода инкрементного Z-сканера на один или более уровней хрусталика глаза и выполнения хирургической операции на хрусталике глаза посредством Z-сканирования глубины фокуса с помощью непрерывного Z-сканера.
В вариантах осуществления, способ включает в себя этап поддержания аберрации лучше порогового значения в целевой области, при этом аберрация является одной из сферической аберрации, комы, астигматизма и хроматической аберрации.
В вариантах осуществления, этап Z-сканирования посредством инкрементного Z-сканера включает в себя размещение одного или более регулируемых каскадов инкрементного Z-сканера в пути лазерного луча.
В вариантах осуществления, этап Z-сканирования посредством инкрементного Z-сканера включает в себя размещение регулируемых каскадов в последовательности конфигураций, которые Z-сканируют глубину фокуса при предварительно определенных Z-приращениях.
В вариантах осуществления, этап Z-сканирования посредством инкрементного Z-сканера включает в себя перемещение глубины фокуса пропорционально базовому Z-шагу, умноженному на различные степени 2, посредством перемещения различных регулируемых каскадов в и за пределы пути лазерного луча.
В вариантах осуществления, Z-сканирование глубины фокуса включает в себя Z-сканирование глубины фокуса с помощью непрерывного Z-сканера до глубины фокуса почти в максимум первого диапазона непрерывного сканирования, увеличение глубины фокуса с инкрементным Z-шагом посредством инкрементного Z-сканера, сброс непрерывного Z-сканера почти до минимума второго диапазона непрерывного сканирования и Z-сканирование глубины фокуса во втором диапазоне непрерывного сканирования.
В вариантах осуществления, первый диапазон непрерывного сканирования и второй диапазон непрерывного сканирования по существу равны.
В вариантах осуществления, этап Z-сканирования глубины фокуса включает в себя Z-сканирование глубины фокуса по существу независимо от регулирования числовой апертуры лазерного луча.
Некоторые варианты осуществления включают в себя лазерный источник, чтобы формировать луч импульсного лазера, XY-сканер, чтобы сканировать лазерный луч в направлениях, поперечных к оси Z, непрерывный Z-сканер и Z-сканер с регулируемыми каскадами, чтобы сканировать лазерный луч вдоль оси Z.
В вариантах осуществления, Z-сканер с регулируемыми каскадами включает в себя регулируемые каскады, выполненные с возможностью размещения в и вне пути лазерного луча.
Краткое описание чертежей
Фиг. 1 иллюстрирует пример хирургической системы доставки лазерного излучения.
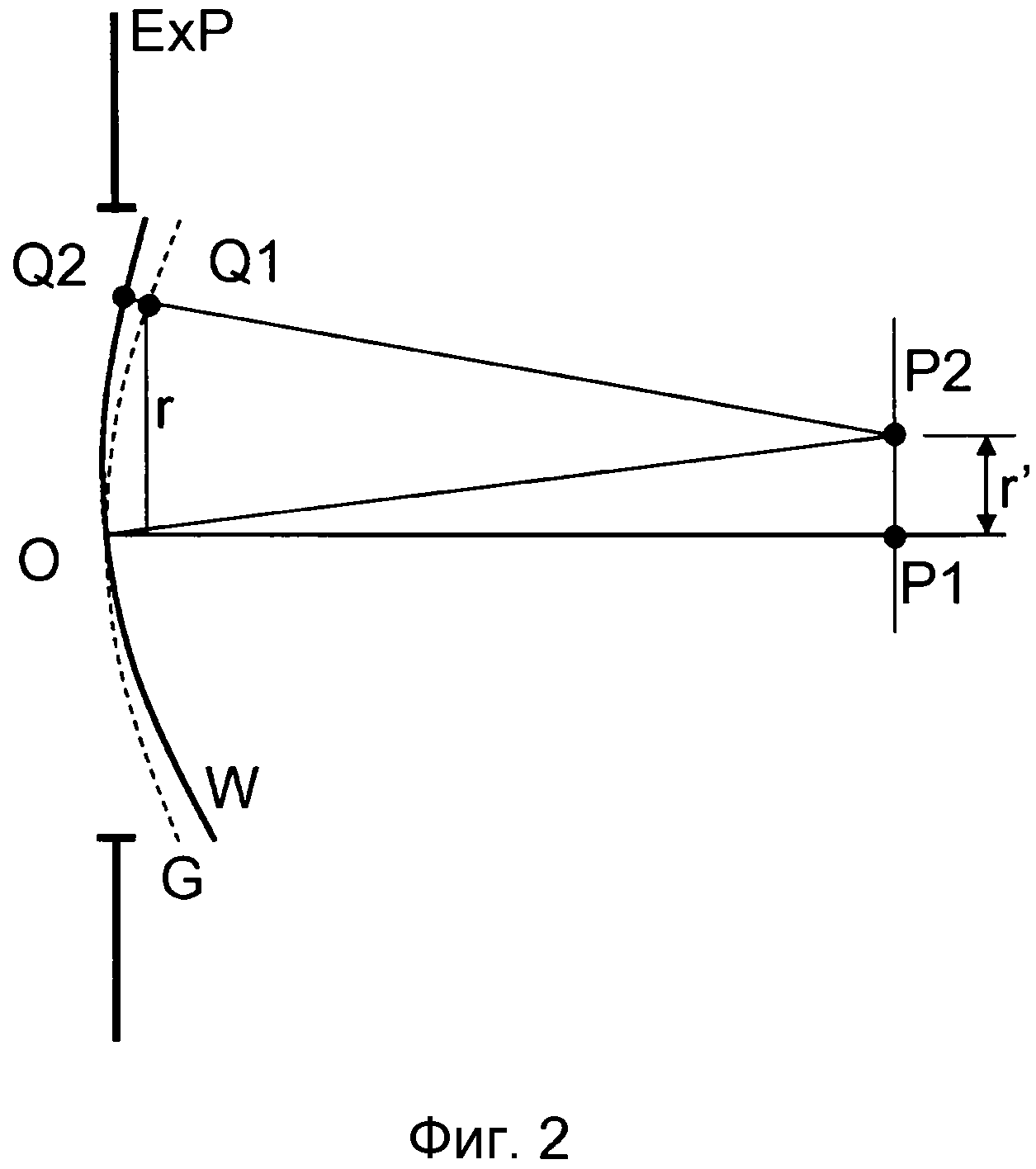
Фиг. 2 иллюстрирует гауссов волновой фронт G и аберрационный волновой фронт W.
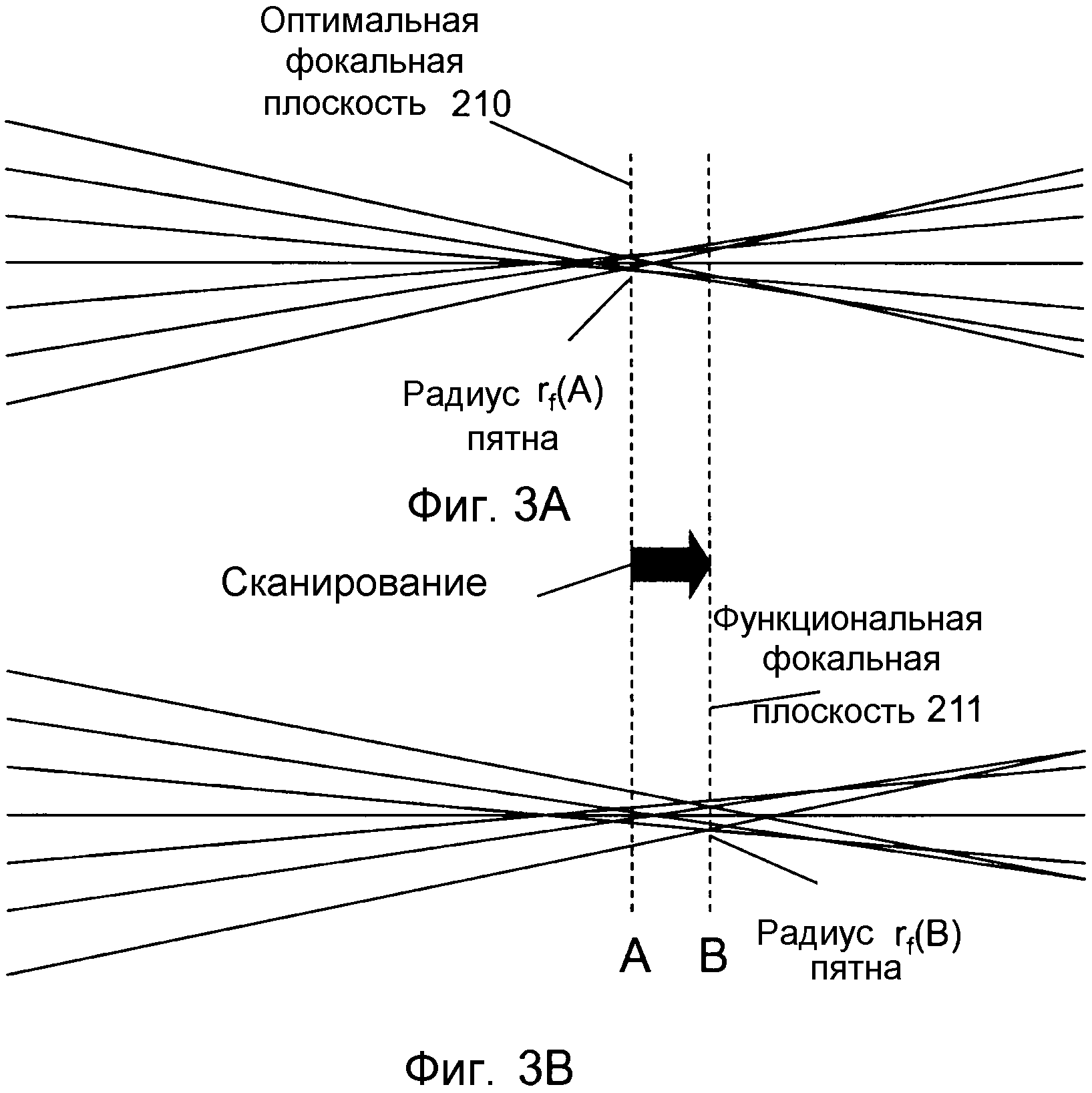
Фиг. 3A-B иллюстрируют оптические лучи в оптимальной и сканированной фокальной плоскости.
Фиг. 3C иллюстрирует пример радиуса фокального пятна.
Фиг. 4 иллюстрирует пример взаимосвязи между коэффициентом S Штреля и RMS-ошибкой ω волнового фронта.
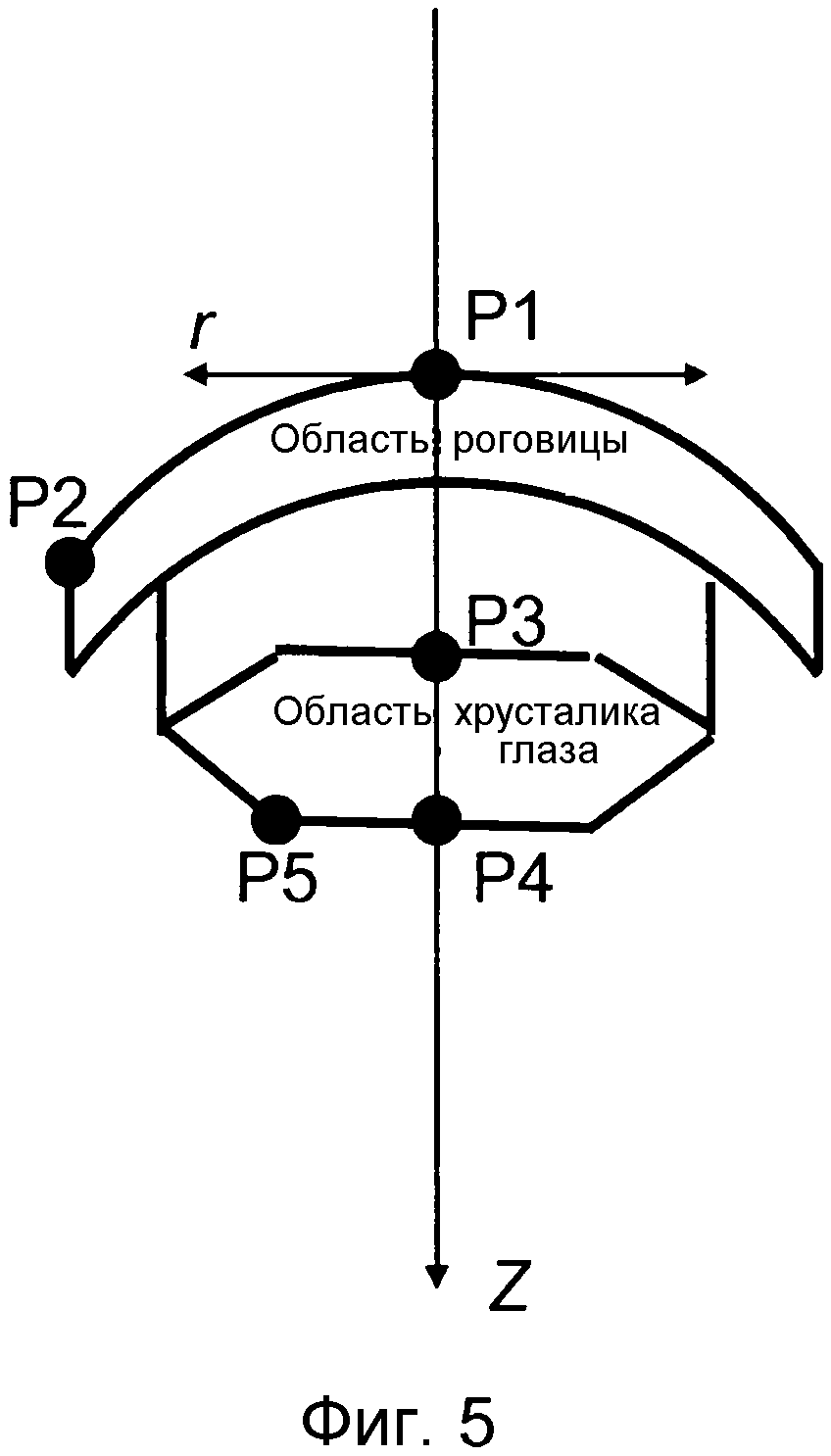
Фиг. 5 иллюстрирует опорные точки для офтальмологической хирургии.
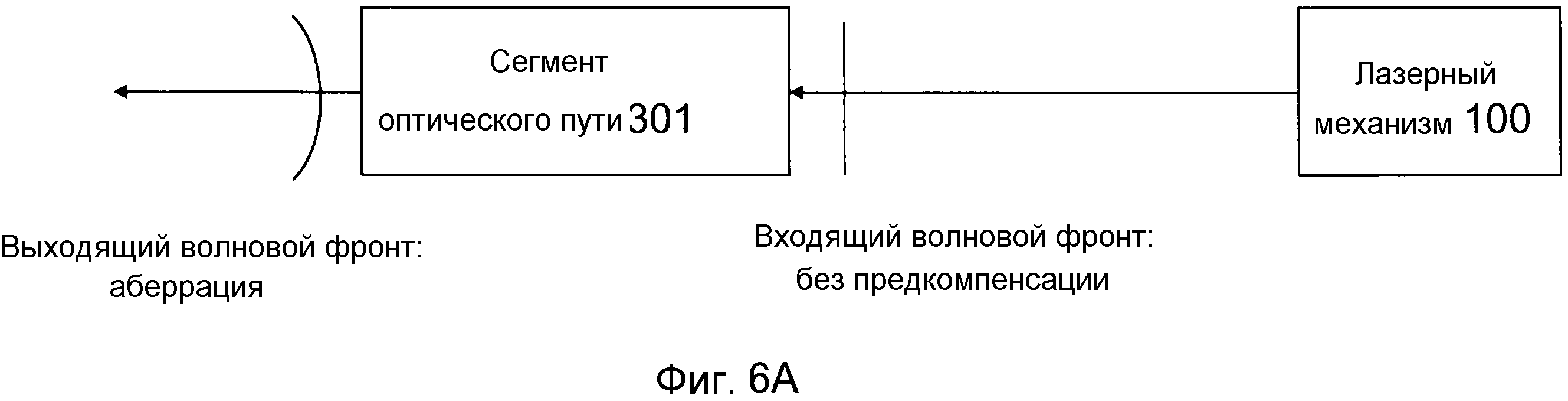
Фиг. 6A-B иллюстрируют примерный режим работы модуля предкомпенсации в системе на фиг. 1.
Фиг. 7A-B иллюстрируют различные варианты использования эффективной функциональности Z-сканирования.
Фиг. 8A-D иллюстрируют примерные реализации модуля предкомпенсации в системе на фиг. 1.
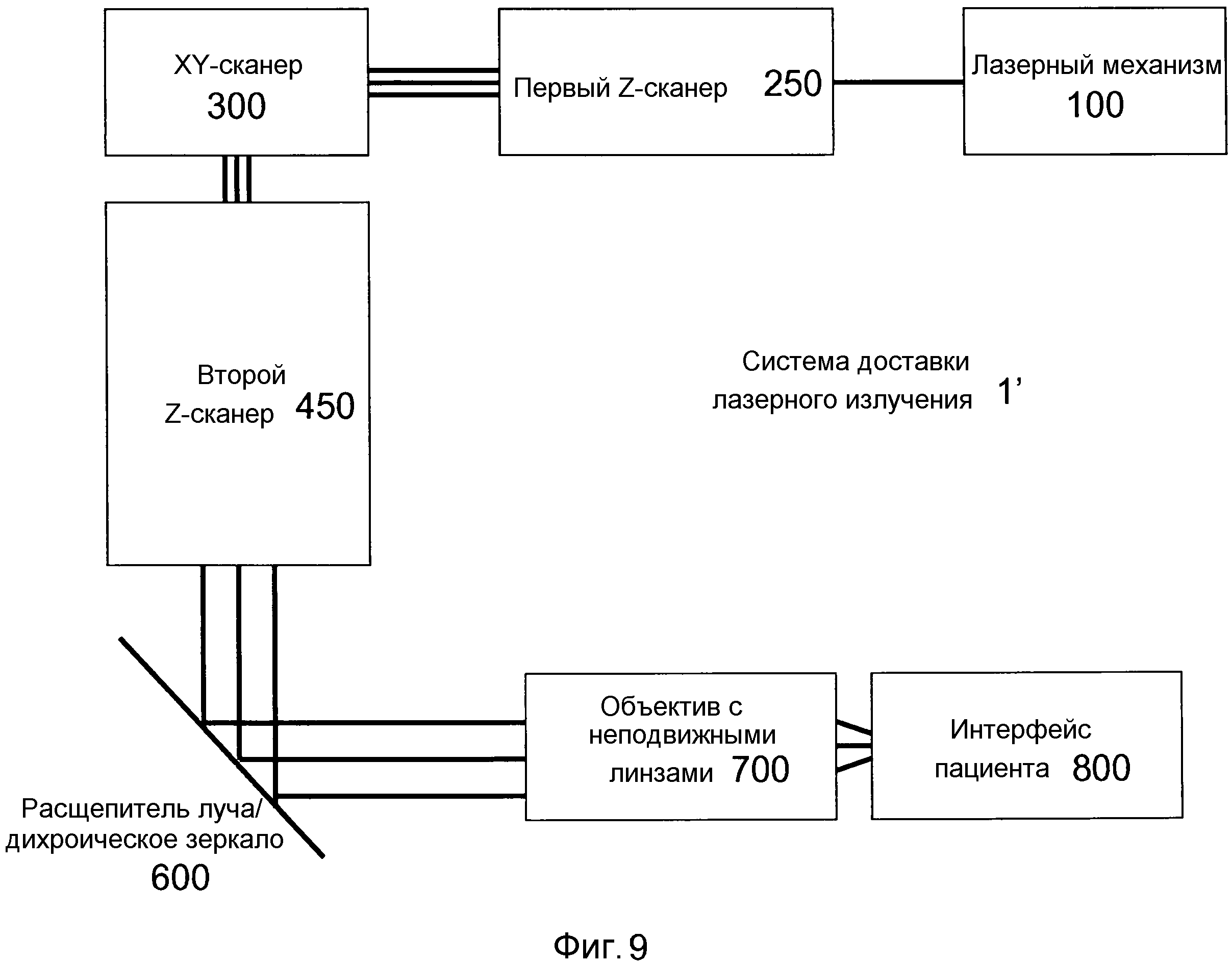
Фиг. 9 иллюстрирует примерную реализацию системы доставки лазерного излучения на фиг. 1 с двумя Z-сканерами.
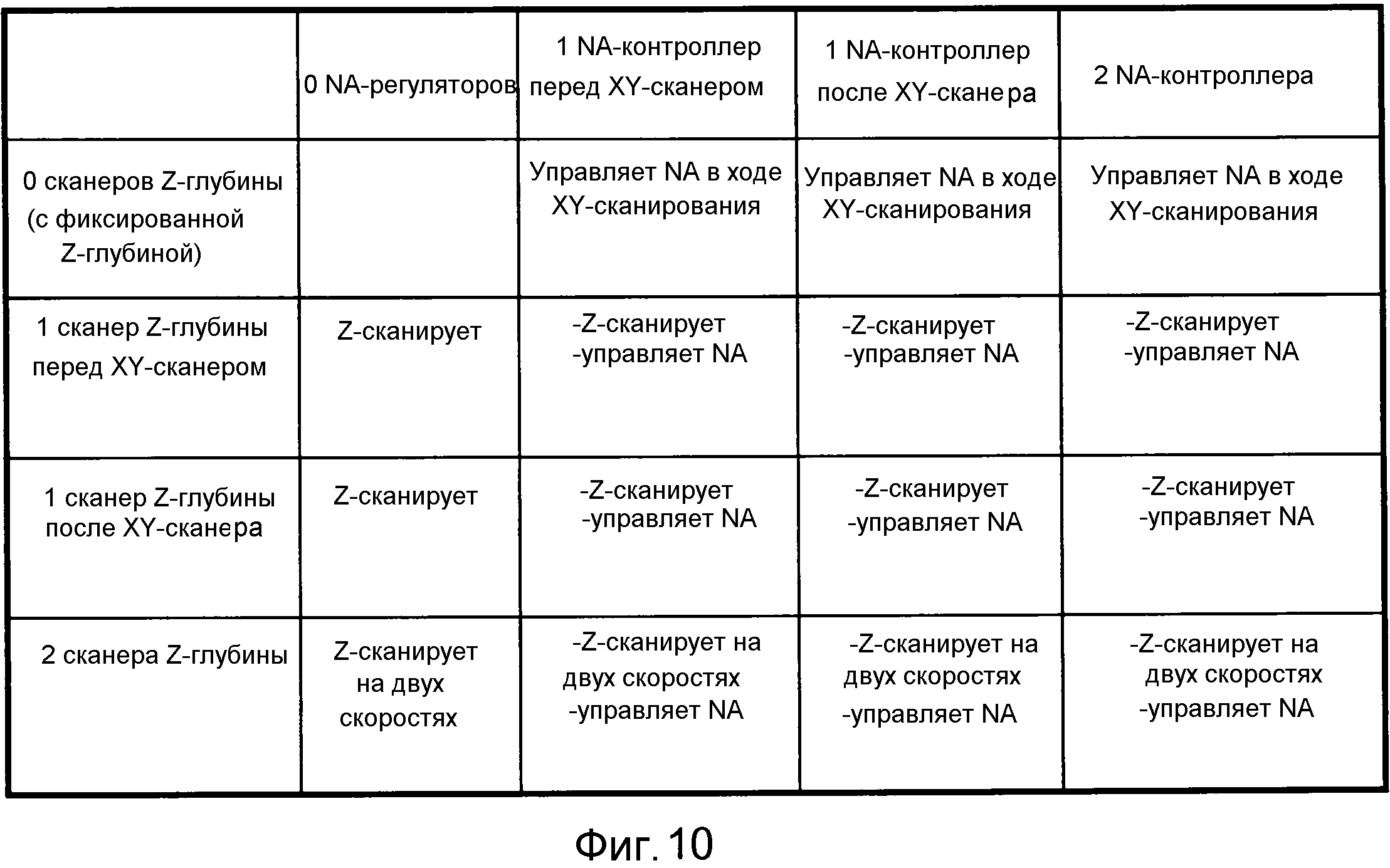
Фиг. 10 иллюстрирует таблицу конфигураций, содержащих 0, 1 или 2 сканера Z-глубины и 0, 1 или 2 NA-модификатора.
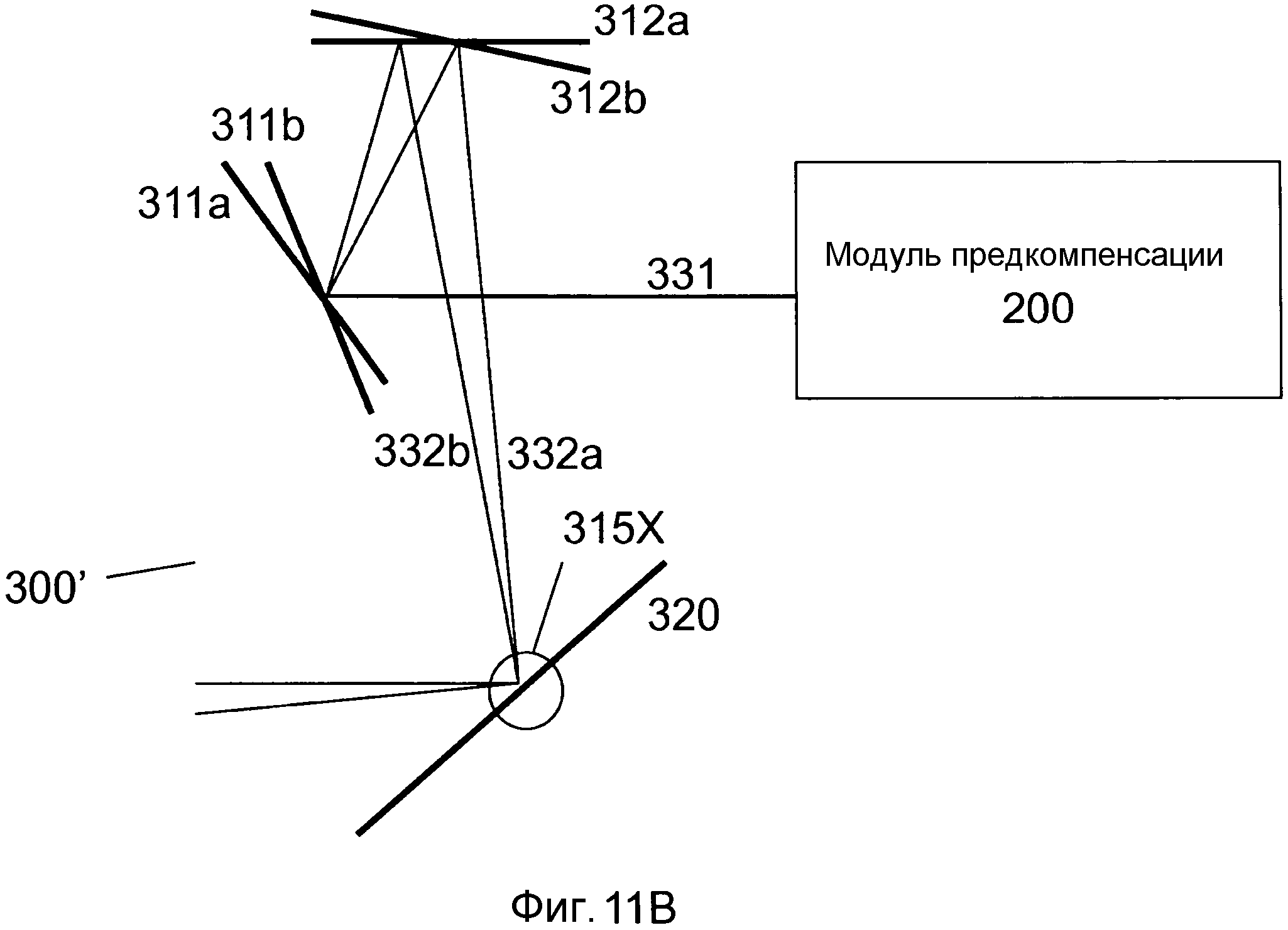
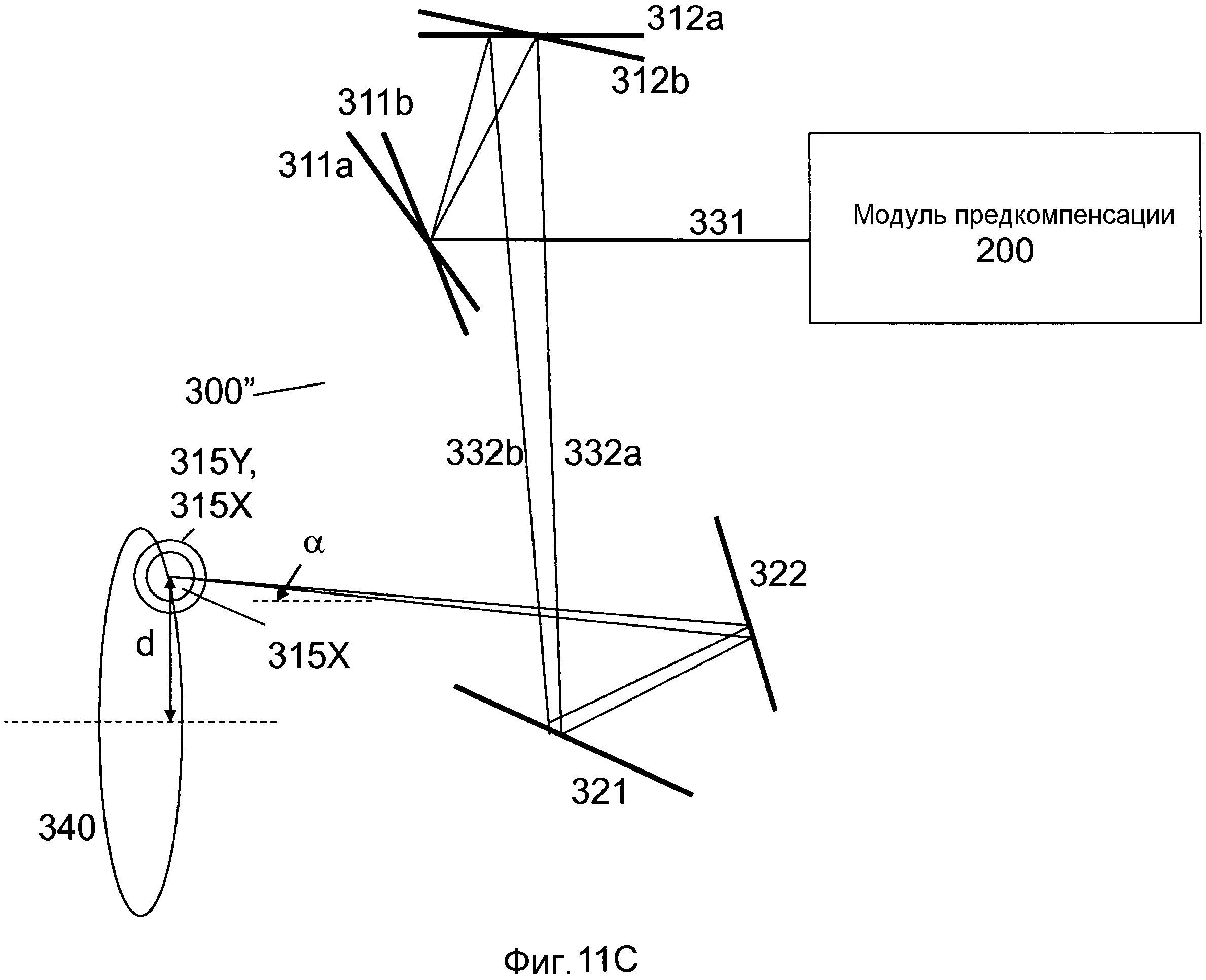
Фиг. 11A-C иллюстрируют примерные реализации XY-сканера в системе на фиг. 9.
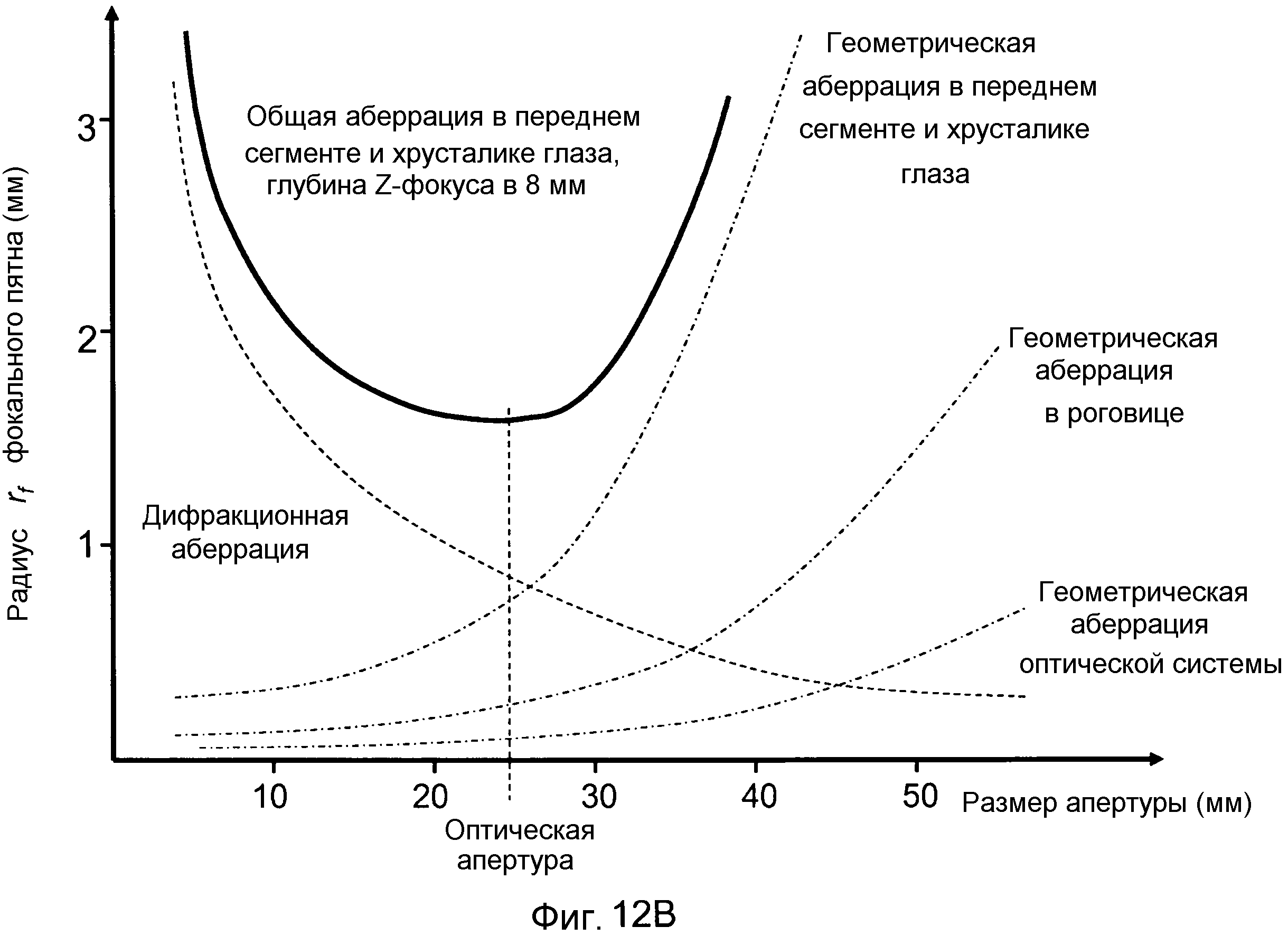
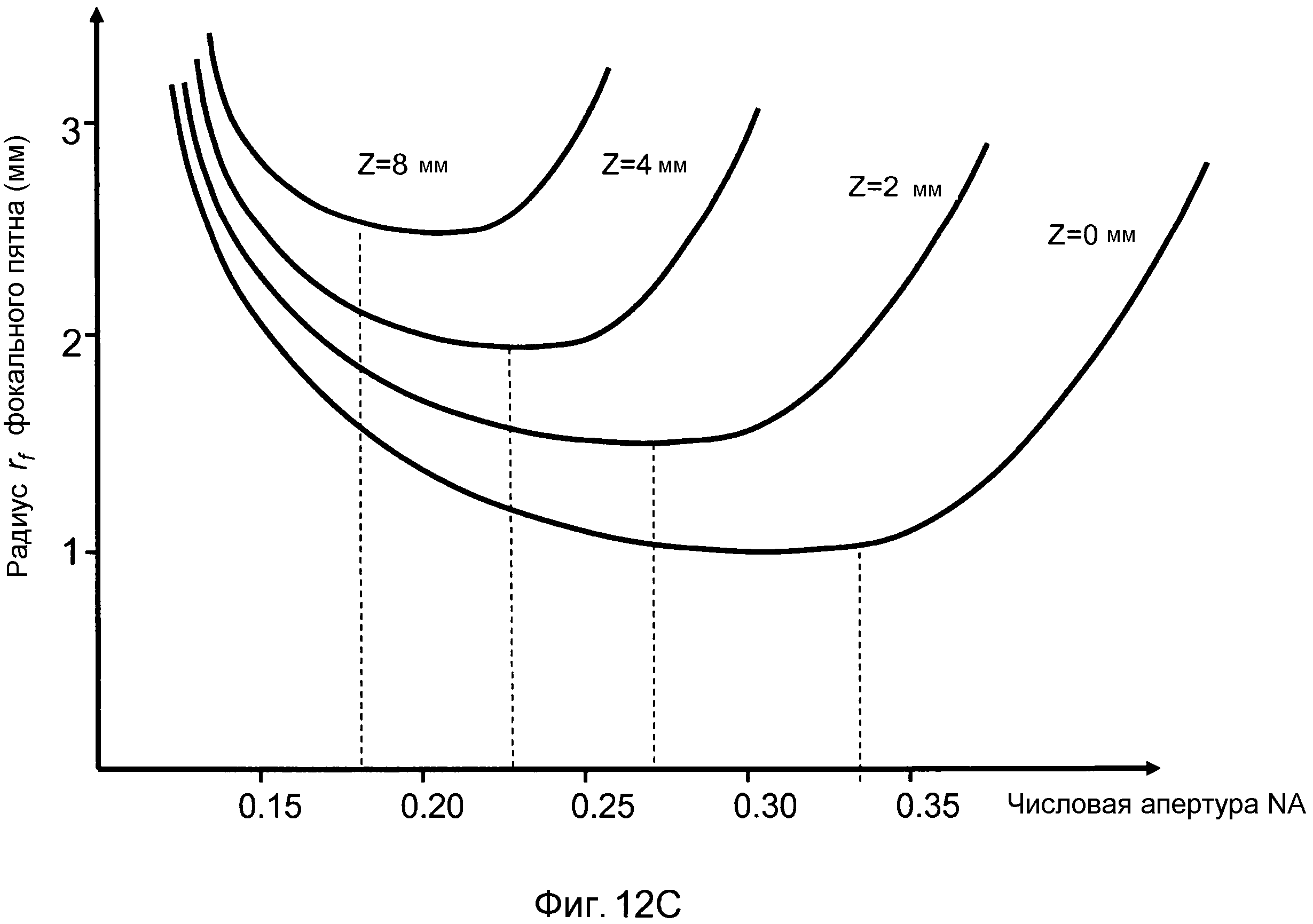
Фиг. 12A-D иллюстрируют аберрацию в качестве функции от числовой апертуры и соответствующую оптическую числовую апертуру NAopt(z) в качестве функции от глубины Z-фокуса.
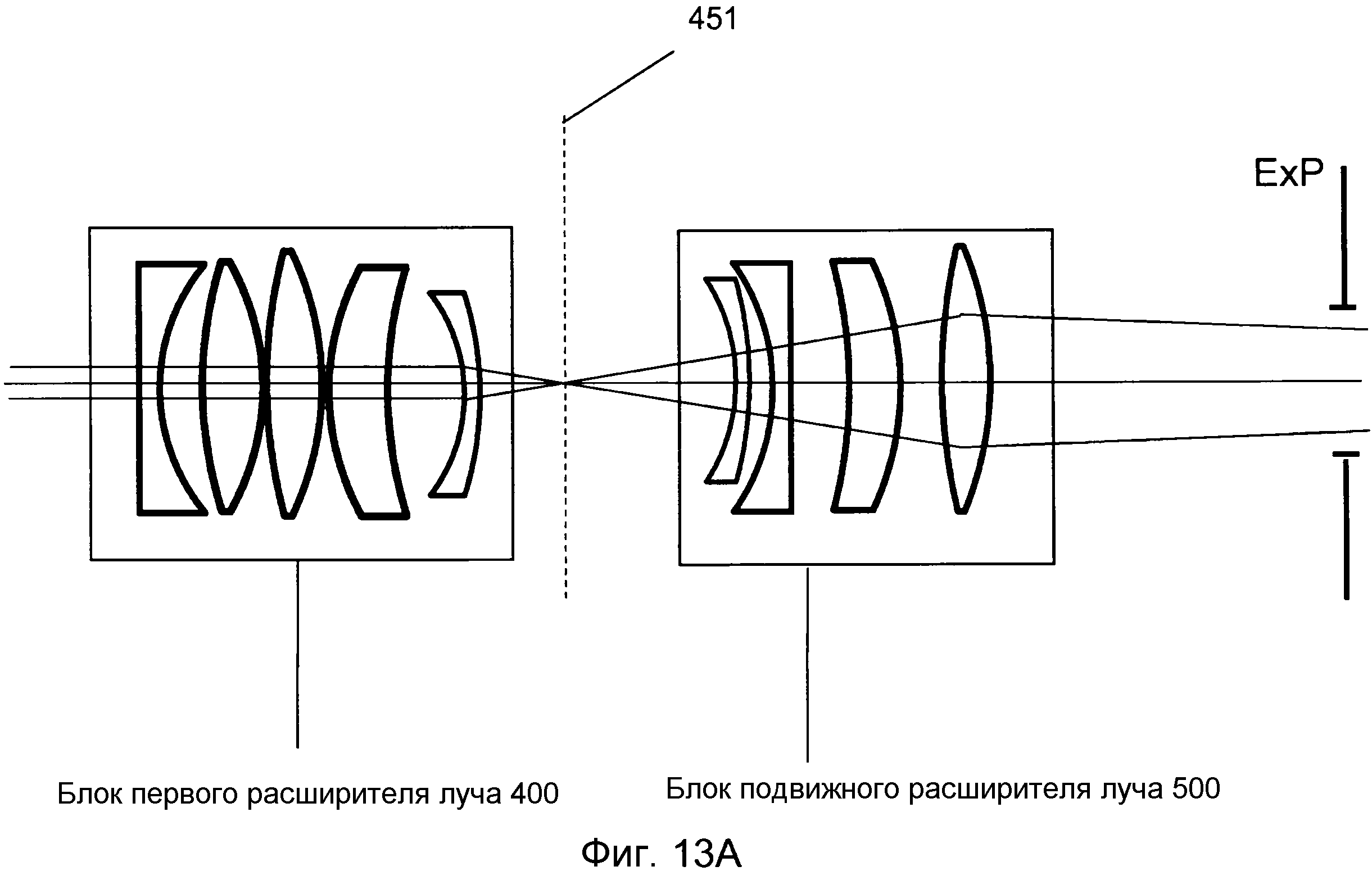
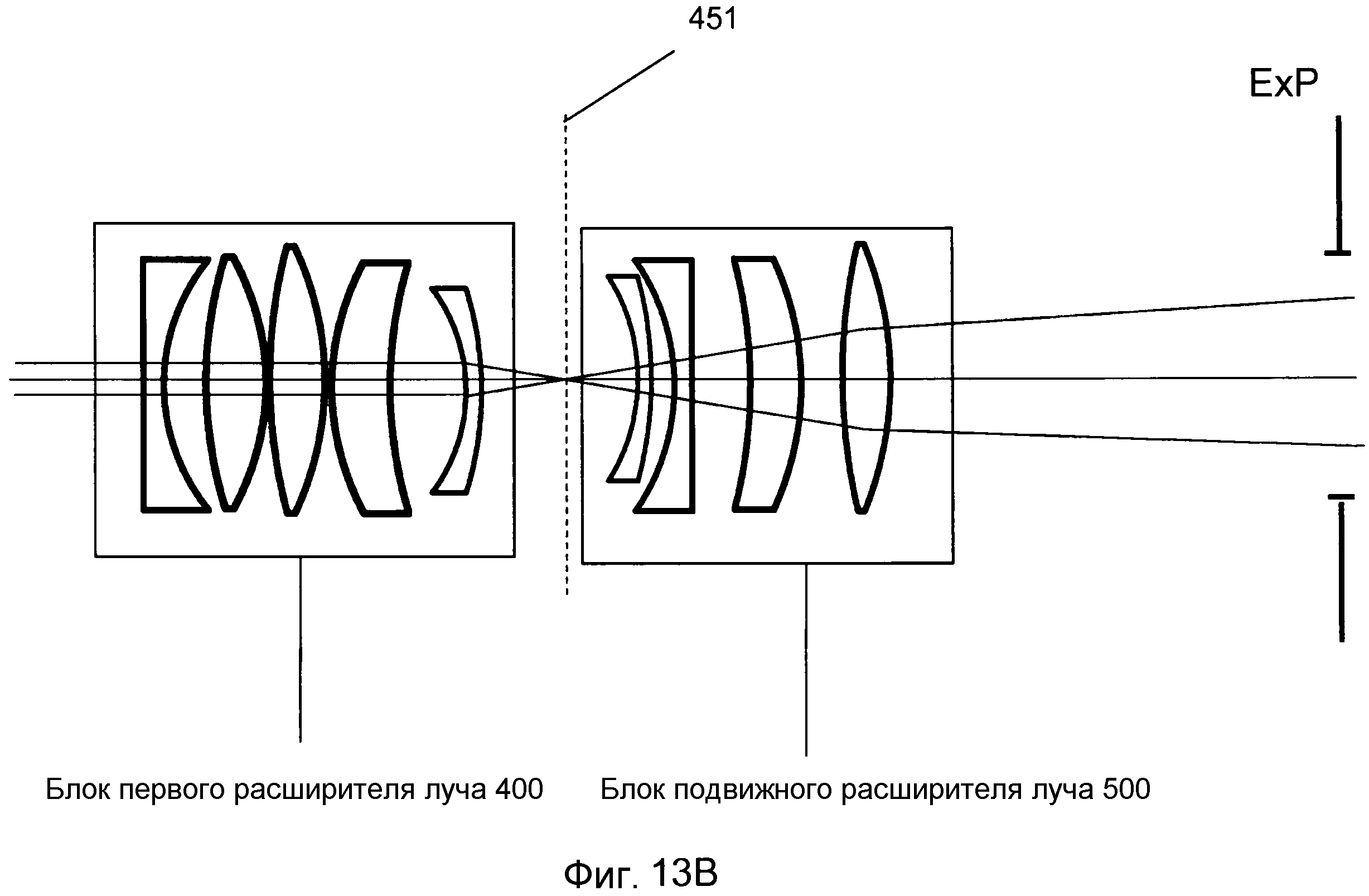
Фиг. 13A-B иллюстрируют две примерных настройки блока первого расширителя луча и блока подвижного расширителя луча.
Фиг. 14 иллюстрирует пример промежуточной фокальной плоскости.
Фиг. 15 иллюстрирует пример системы доставки лазерного излучения с инкрементным Z-сканером.
Фиг. 16A-B иллюстрируют Z-уровни, шаги и диапазоны в целевых областях для инкрементного Z-сканера в системе на фиг. 15.
Фиг. 17A-B иллюстрируют работу Z-сканера с регулируемыми каскадами для инкрементного Z-сканера в системе на фиг. 15.
Фиг. 18 иллюстрирует реализацию инкрементного Z-сканера в системе на фиг. 15.
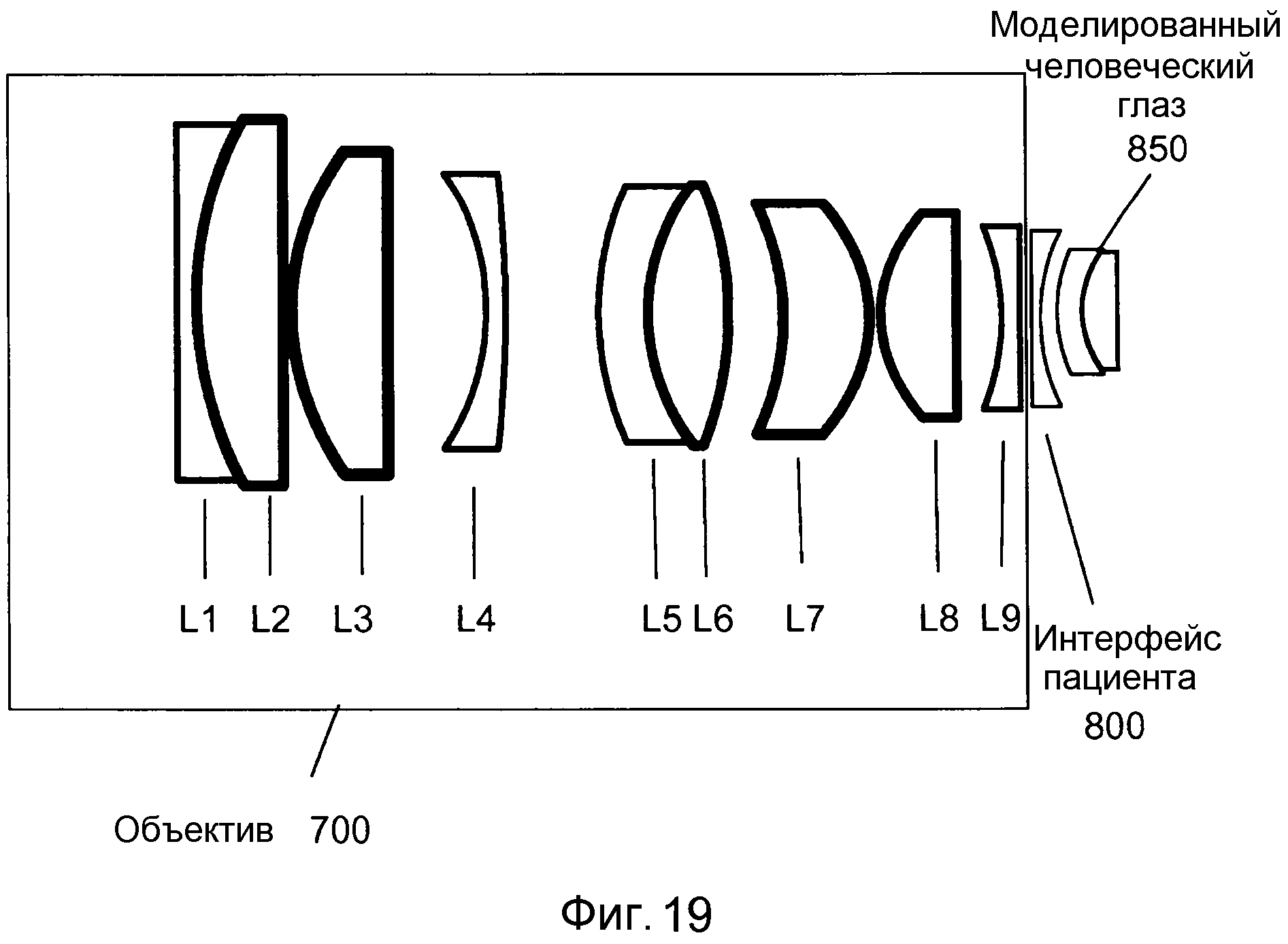
Фиг. 19 иллюстрирует реализацию объектива для системы на фиг. 15.
Фиг. 20 иллюстрирует искривленную фокальную плоскость в целевой области.
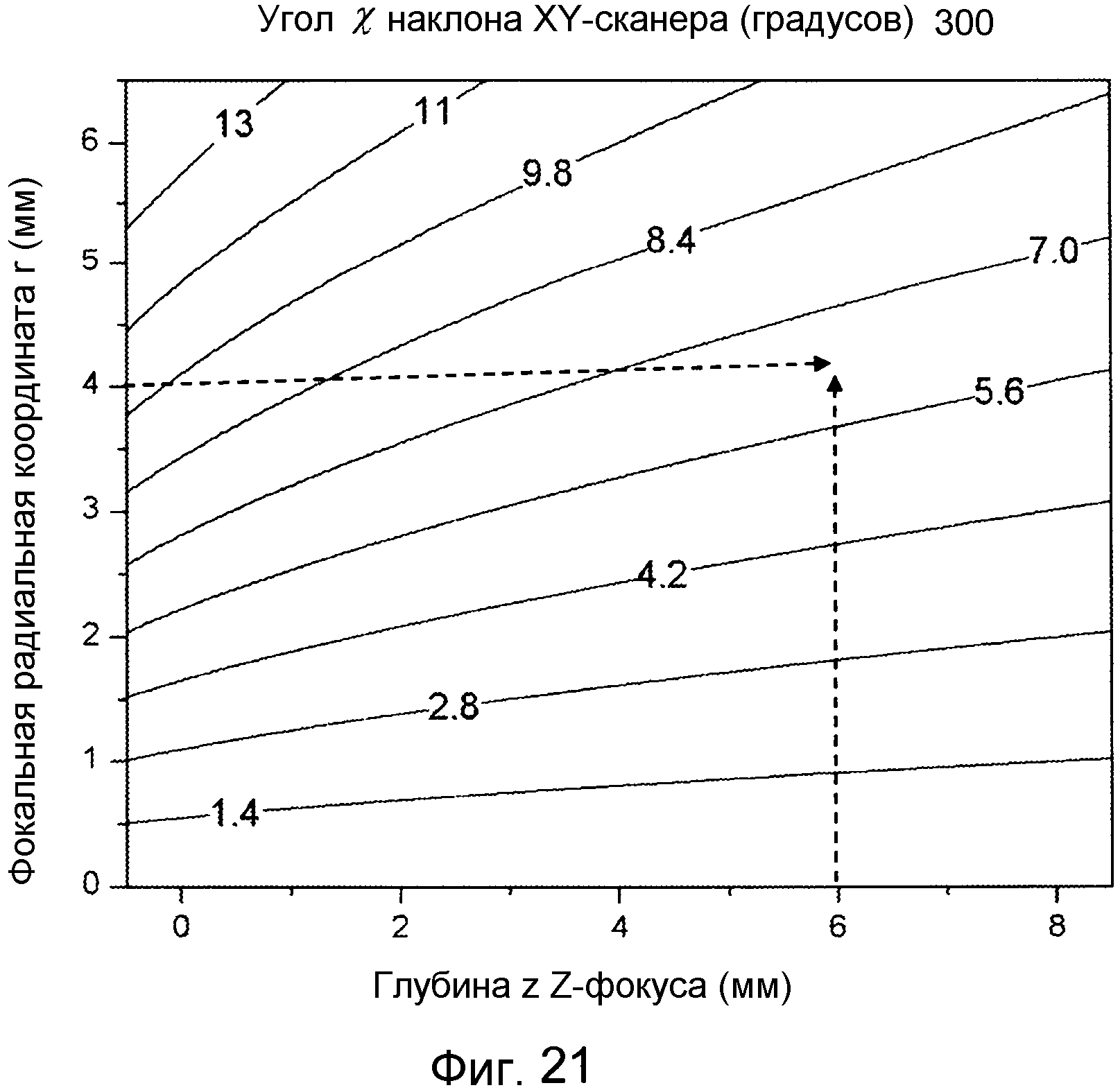
Фиг. 21 иллюстрирует номограмму угла наклона XY-сканера.
Фиг. 22 иллюстрирует номограмму положения подвижного расширителя луча (пучка).
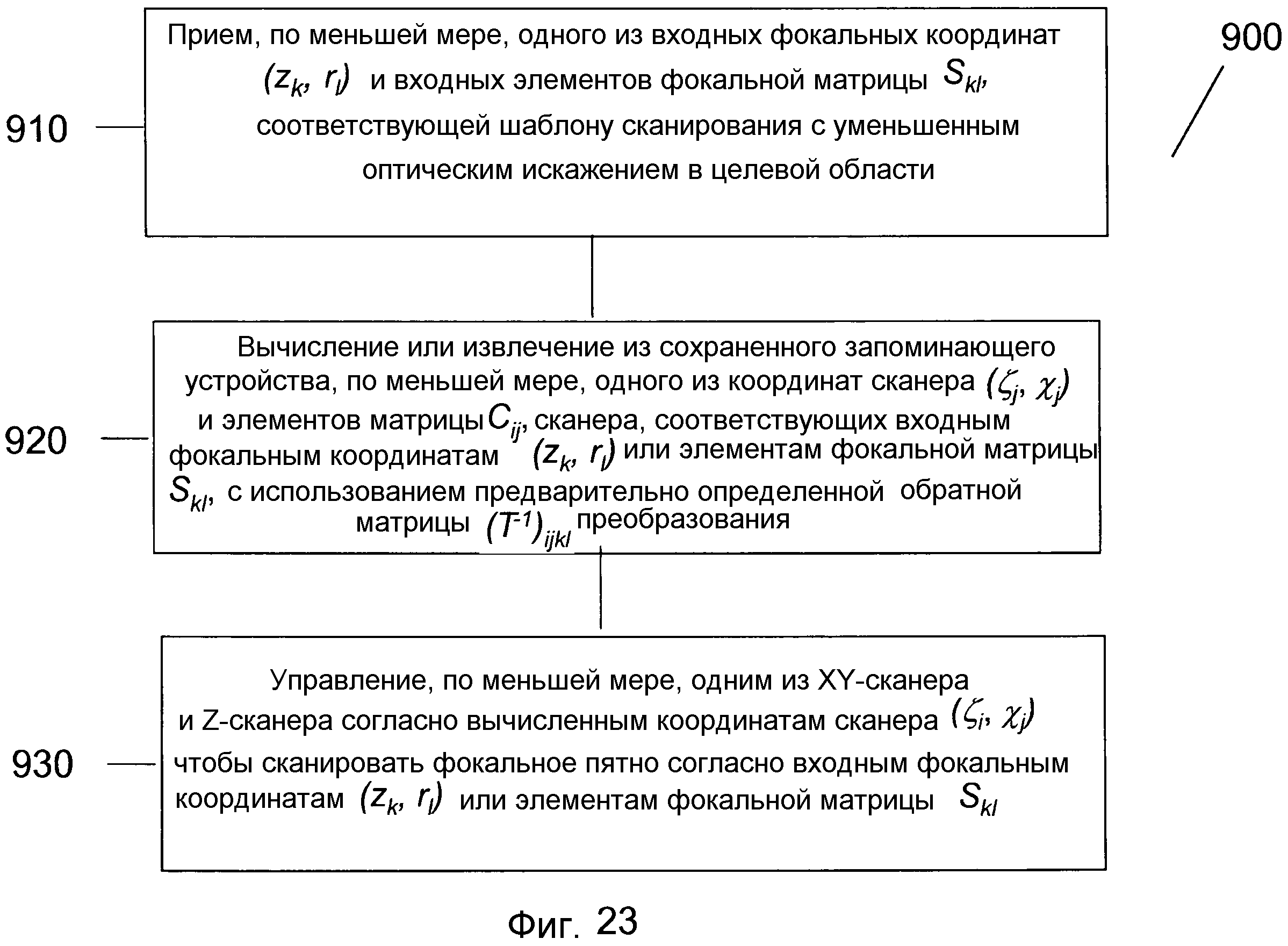
Фиг. 23 иллюстрирует этапы примера способа управления сканированием луча.
Подробное описание изобретения
Примеры и реализации систем и технологий, описанных в этом документе, предоставляют регулируемое управление сканированием при доставке лазерного луча из лазерных импульсов из фемтосекундного импульсного лазера в хирургическую цель. Реализации систем и технологий, описанных в этом документе, могут использоваться для выполнения хирургических операций на роговице и хрусталике глаза. Проведение офтальмологической хирургии на хрусталике глаза ассоциировано с требованиями, качественно отличающимися от требований операций на роговице. Также, традиционные технологии, например, заключающие в себе ручные инструменты, ультразвук и нагретые жидкости, зачастую имеют существенные недостатки при использовании в хирургических операциях на хрусталике глаза. Примеры таких недостатков включают в себя необходимость входить в глаз с зондами для того, чтобы выполнять фрагментацию, и ограниченная точность.
Примеры и реализации систем и технологий, описанных в этом документе, используют фотопробойную лазерную технологию, чтобы доставлять лазерные импульсы в хрусталик глаза, чтобы оптически фрагментировать хрусталик глаза без вставки зонда, и тем самым могут предлагать потенциал для улучшенного удаления хрусталика глаза. Лазерно-индуцированный фотопробой широко используется в лазерной офтальмологической хирургии, и лазеры Nd:YAG часто используются в качестве лазерных источников для фрагментации хрусталика глаза через лазерно-индуцированный фотопробой. Некоторые существующие системы используют лазерные лучи с наносекундными импульсами с энергиями импульса в несколько мДж (E. H. Ryan и др., "American Journal of Ophthalmology", 104: 382-386, октябрь 1987 года; R. R. Kruger и др., "Ophthalmology", 108: 2122-2129, 2001 год) и пикосекундными импульсами с несколькими десятками мкДж в расчете на импульс (A. Gwon et al., "J. Cataract Refract Surg.", 21, 282-286, 1995 год). Эти относительно длинные импульсы выделяют относительно большие величины энергии в хирургические пятна, приводя к значительным ограничениям в точности и управлении операцией при возникновении относительно высокого уровня риска нежелательных результатов. Параллельно, в смежной области техники хирургии роговицы следует признать, что меньшие длительности импульса и лучшая фокусировка могут достигаться посредством использования импульсов длительности в сотни фемтосекунд вместо наносекундных и пикосекундных импульсов. Фемтосекундные импульсы выделяют намного меньше энергии в расчете на импульс, значительно повышая точность и безопасность операции. Различные фемтосекундные лазерные системы выполнены с возможностью удовлетворять требованиям хирургии роговицы и зачастую имеют диапазон глубин фокуса лазера меньше приблизительно 1 мм, толщины роговицы. Поскольку хрусталик глаза типично находится на глубине 3-10 мм, лазерные системы, выполненные с возможностью операций на роговице, не предлагают решений относительно существенных сложностей проведения операции на хрусталике глаза.
Один пример офтальмологической лазерной системы, описанной в этом документе, включает в себя лазерный источник, который формирует лазерный луч лазерных импульсов; XY-сканер, который сканирует лазерный луч в направлениях, поперечных к оси Z; Z-сканер, который сканирует лазерный луч вдоль оси Z и включает в себя непрерывный Z-сканер, который предоставляет непрерывное сканирование лазерного луча вдоль оси Z; и инкрементный Z-сканер, который предоставляет инкрементное сканирование лазерного луча вдоль оси Z. Эта система может быть реализована и выполнена с возможностью использования в хирургии хрусталика глаза и хирургии роговицы. Некоторые подробности по реализации этой системы предоставляются ниже.
1. Фемтосекундные лазерные импульсы должны формироваться надежно. Фемтосекундный импульс с высокой частотой повторения дает возможность использования намного меньшей энергии в расчете на импульс, предоставляя гораздо более высокую степень управления и точности для оператора системы. Тем не менее, надежное формирование фемтосекундных импульсов представляет намного большую сложность, чем формирование наносекундных или пикосекундных импульсов, используемых посредством некоторых существующих систем.
2. Луч лазерного скальпеля значительно преломляется при распространении через вплоть 5 миллиметров преломляющей среды, включающей в себя роговицу и переднюю камеру глаза, чтобы достигать только хирургической цели, хрусталика глаза. Напротив, лазерный луч, используемый для хирургии роговицы, фокусируется на глубине в долю миллиметра и тем самым по существу не преломляется, когда он входит в цель на роговице из лазерной системы.
3. Хирургическая система доставки лазерного излучения выполнена с возможностью сканировать всю хирургическую область, например, от передней части хрусталика глаза при типичной глубине в 5 мм до задней части хрусталика глаза при типичной глубине в 10 мм. Этот диапазон сканирования с глубиной 5 мм или более или "диапазон Z-сканирования" является значительно более обширным, чем диапазон сканирования с глубиной 1 мм, используемый для хирургии на роговице. Типично, хирургическая оптика, в частности, используемая в данном документе оптика с высокой числовой апертурой, оптимизируется, чтобы фокусировать лазерный луч к конкретной функциональной глубине. Во время процедур на роговице сканирование с глубиной 1 мм приводит только к умеренному отклонению от оптимизированной функциональной глубины. Напротив, во время сканирования от 5 до 10 мм во время хирургии хрусталика глаза система приводится в действие на большом расстоянии от фиксированной оптимизированной функциональной глубины. Следовательно, хирургическая система доставки лазерного излучения для хрусталика глаза использует высокоточную адаптивную оптику, чтобы иметь возможность сканировать обширный диапазон сканирования с определенной глубиной, требуемый посредством хирургии хрусталика глаза.
4. Некоторые варианты осуществления интегрируются в том смысле, что они выполнены с возможностью проводить операцию как на роговице, так и на хрусталике глаза. В этих интегрированных вариантах осуществления диапазон сканирования с определенной глубиной может быть до 10 мм вместо 5 мм, приводя к еще более сложным проблемам.
5. Во время хирургических операций на роговице, таких как множество разновидностей лазерной коррекции зрения по методу LASIK, лазерный луч сканируется перпендикулярно оптической оси ("в плоскости XY"). В типичных операциях диапазон XY-сканирования охватывает только центральную часть роговицы с диаметром 10 мм. Тем не менее, в интегрированных хирургических системах дополнительные разрезы также могут формироваться. Одним типом разрезов являются входные разрезы, предоставляющие доступ к внутренней части глаза для аспирационных игл и традиционных хирургических инструментов. Другим типом разрезов являются лимбальные ослабляющие надрезы (LRI), которые заключают в себе формирование пары надрезов в лимбе роговицы непосредственно перед сосудистой аркадой. Посредством регулирования длины, глубины и местоположения этих дугообразных надрезов, можно принудительно вызывать изменения в астигматизме роговицы. Входные разрезы и LRI могут быть размещены на внешней границе роговицы, типично с диаметром 12 мм. Хотя увеличение диаметра XY-сканирования с 10 до 12 мм является только 20%-ым увеличением по сравнению с обычным диаметром клапанов для лазерной коррекции зрения по методу LASIK, очень сложно поддерживать управление внеосевыми аберрациями системы доставки лазерного излучения при таких диаметрах, поскольку внеосевые аберрации растут пропорционально более высоким индексам диаметра поля в фокальной плоскости.
6. Лазерные хирургические операции на хрусталике глаза могут требовать инструкций от сложных систем визуализации. В некоторых системах визуализации лимбальные кровеносные сосуды идентифицируются как выступающие в качестве контрольных отметок на глазу, чтобы калибровать цикловращательное совмещение глаза в течение времени хирургического вмешательства, в некоторых случаях относительно эталонных координат, идентифицированных в ходе предоперационной диагностики глаза. Кровеносные сосуды, выбираемые на периферии хирургической области, могут быть наименее затрагиваемыми при хирургии и тем самым самыми надежными. Системы визуализации, направленные на такие периферические кровеносные сосуды, тем не менее, требуют оптики для визуализации, чтобы визуализировать область с радиусом, превышающим 10 мм, к примеру, 12 мм.
7. Лазерный луч формирует различные аберрации при распространении вдоль оптического пути внутри глаза. Системы доставки лазерного излучения могут повышать точность посредством компенсации этих аберраций. Дополнительный аспект этих аберраций заключается в том, что они зависят от частоты света (факт, упоминаемый как "хроматическая аберрация"). Компенсация таких частотно-зависимых аберраций повышает сложность системы. Трудность компенсации этих хроматических аберраций увеличивается с полосой пропускания лазерного луча, лазерной системы. Следует напомнить, что спектральная полоса пропускания луча является обратно пропорциональной длительности импульса. Соответственно, полоса пропускания для фемтосекундных импульсов зачастую превышает полосу пропускания пикосекундных импульсов на порядок величины или более, требуя намного лучшей хроматической компенсации в фемтосекундных лазерных системах.
8. Хирургические операции с использованием фемтосекундных лазерных хирургических систем с высокой частотой повторения требуют высокой точности при размещении каждого импульса как в абсолютном смысле относительно целевых местоположений в ткани-мишени, так и в относительном смысле относительно предыдущих импульсов. Например, лазерная система, возможно, должна перенаправлять луч посредством только нескольких микронов в пределах времени между импульсами, которые могут иметь порядок микросекунд. Поскольку время между двумя последующими импульсами является коротким, и прецизионное требование для размещения импульса является высоким, определение целей вручную, используемое в существующих хирургических системах для хрусталиков глаза с низкой частотой повторения, больше не подходит или не допустимо.
9. Система доставки лазерного излучения выполнена с возможностью доставлять фемтосекундные лазерные импульсы в весь хирургический объем хрусталика глаза через преломляющую среду, с сохранением их временной, спектральной и пространственной целостности.
10. Чтобы обеспечивать, что только ткань в хирургической области принимает лазерный луч с достаточно высокой плотностью энергии, чтобы вызывать такие хирургические эффекты, как абляция ткани, система доставки лазерного излучения имеет необычно высокую числовую апертуру (NA). Эта высокая NA приводит к небольшим размерам пятен и предоставляет необходимую степень управления и точность для хирургической операции. Типичные диапазоны для числовой апертуры могут включать в себя значения NA, превышающие 0,3, приводя к размерам пятен в 3 микрона или меньше.
11. С учетом сложности оптического пути лазера для хирургии хрусталика глаза, система доставки лазерного излучения достигает высокой точности и степени управления посредством включения высокопроизводительной автоматизированной системы визуализации, тогда как хирургические системы для операций на роговице позволяют достигать удовлетворительного управления без таких систем визуализации или с низким уровнем визуализации. А именно, хирургические и визуализирующие функции системы, а также обычные наблюдаемые лучи, в общем, работают в различных полосах спектра. В качестве примера, лазерные скальпели могут работать при длинах волн в полосе частот 1,0-1,1 микрона, наблюдаемых лучах в видимой полосе частот 0,4-0,7 микронов и визуализирующих лучах в полосе частот 0,8-0,9 микронов. Комбинирование траектории луча в общих или совместно используемых оптических компонентах накладывает серьезные хроматические требования на оптику лазерной хирургической системы.
Вышеуказанные подробности реализации иллюстрируют посредством нескольких примеров, что офтальмологическая лазерная хирургия (i) на хрусталике глаза (ii) с фемтосекундными импульсами вводит требования, которые качественно отличаются от требований хирургии роговицы и даже требований хирургии хрусталика глаза с использованием только наносекундных или пикосекундных лазерных импульсов.
Фиг. 1 иллюстрирует систему 1 доставки лазерного излучения. Перед ее подробным описанием следует упомянуть, что некоторые варианты осуществления комбинируют систему доставки лазерного излучения по фиг. 1 с системой визуализации или наблюдательной системой. В некоторых процедурах на роговице, к примеру, при лечении на основе лазерной коррекции зрения по методу LASIK, устройства слежения за глазом устанавливают опорные положения глаза посредством визуальных ориентиров, к примеру, идентификации центра радужной оболочки глаз посредством алгоритмов визуализации и обработки изображений, типично на поверхности глаза. Тем не менее, существующие устройства слежения за глазом распознают и анализируют признаки в двумерном пространстве, не имея информации глубины, поскольку хирургические операции выполняются для роговицы, крайнего внешнего слоя глаза. Зачастую, роговица даже выравнивается, чтобы делать поверхность действительно двумерной.
Ситуация существенно отличается при фокусировке лазерного луча в хрусталике глаза, глубоко внутри глаза. Хрусталик глаза может изменять свое положение, форму, толщину и диаметр во время размещения, не только между предшествующим измерением и хирургической операцией, но также и во время хирургической операции. Присоединение глаза к хирургическому инструменту посредством механического средства также может не очень четко изменять форму глаза. Такие устройства для присоединения могут включать в себя фиксацию глаза с помощью подсасывающего кольца или апланатирование глаз с плоским или искривленным хрусталиком глаза. Дополнительно, перемещение пациента во время хирургии может вводить дополнительные изменения. Эти изменения могут составлять в целом вплоть до нескольких миллиметров смещения визуальных ориентиров внутри глаза. Следовательно, механическое базирование и фиксация поверхности глаза, к примеру, передней поверхности роговицы или лимба является неудовлетворительным при выполнении прецизионной лазерной хирургии на хрусталике глаза или других внутренних частях глаза.
Чтобы разрешать эту проблему, система 1 доставки лазерного излучения может быть комбинирована с системой визуализации, как описано в находящейся одновременно на рассмотрении заявке на патент (США) порядковый номер 12/205844 авторов R.M. Kurtz, F. Raksi и M. Karavitis, которая настоящим полностью содержится в данном документе по ссылке. Система визуализации выполнена с возможностью визуализировать части хирургической области, чтобы устанавливать трехмерные опорные положения на основе внутренних признаков глаза. Эти изображения могут создаваться до хирургического вмешательства и обновляться параллельно с хирургической операцией, чтобы учитывать отдельные вариации и изменения. Изображения могут быть использованы для того, чтобы безопасно направлять лазерный луч на требуемое местоположение с высокой точностью и степенью управления.
В некоторых реализациях, система визуализации может быть системой оптической когерентной томографии (OCT). Визуализирующий луч системы визуализации может иметь отдельный оптический путь визуализации либо оптический путь, частично или полностью совместно используемый с хирургическим лучом. Системы визуализации с частично или полностью совместно используемым оптическим путем уменьшают затраты и упрощают калибровку систем визуализации и хирургических систем. Система визуализации также может использовать источник света, совпадающий или отличный от источника света лазера системы 1 доставки лазерного излучения. Система визуализации также может иметь собственные подсистемы сканирования луча или может использовать подсистемы сканирования системы 1 доставки лазерного излучения. Несколько различных архитектур таких OCT-систем описываются в противопоставленной находящейся одновременно на рассмотрении заявке.
Система 1 доставки лазерного излучения также может быть реализована в комбинации с оптикой для визуальных наблюдений. Оптика для наблюдений может помогать оператору лазерного скальпеля наблюдать эффекты луча лазерного скальпеля и управлять лучом в ответ на наблюдения.
В завершение, в некоторых реализациях, которые используют инфракрасное излучение и тем самым невидимый луч лазерного скальпеля, дополнительный следящий лазер может использоваться при работе на видимых частотах. Видимый следящий лазер может быть реализован с тем, чтобы отслеживать путь инфракрасного лазерного скальпеля. Следящий лазер может управляться при достаточно низкой энергии, чтобы не вызывать пробои ткани-мишени. Оптика для наблюдений может быть выполнена с возможностью направлять следящий лазер, отражаемый от ткани-мишени, оператору системы 1 доставки лазерного излучения.
На фиг. 1, лучи, ассоциированные с системой визуализации и оптикой для визуальных наблюдений, могут включаться в систему 1 доставки лазерного излучения, например, через расщепитель луча/дихроическое зеркало 600. Настоящая заявка не содержит широкого пояснения различных комбинаций системы 1 доставки лазерного излучения с системами визуализации, наблюдательными системами и системами отслеживания. Большое число таких комбинаций, широко поясненных во включенной заявке на патент (США) 12/205844, находятся в рамках объема настоящей заявки.
Система 1 доставки лазерного излучения на фиг. 1 включает в себя лазерный механизм 100, модуль 200 предкомпенсации, XY-сканер 300, блок 400 первого расширителя луча, блок 500 подвижного расширителя луча, расщепитель луча/дихроическое зеркало 600, объектив 700 и интерфейс 800 пациента, при этом блок 400 первого расширителя луча и блок 500 подвижного расширителя луча совместно упоминаются как Z-сканер 450.
Во многих нижеприведенных реализациях используются такие условные обозначения, что направление по оси Z является направлением по существу вдоль оптического пути лазерного луча либо вдоль оптической оси оптического элемента или хирургической цели. Направления, поперечные к направлению по оси Z, упоминаются как направления по осям XY. Термин "поперечный" используется в более широком смысле как включающий в себя то, что в некоторых реализациях поперечные направления и направления по оси Z могут не быть строго перпендикулярными друг другу. В некоторых реализациях, поперечные направления могут быть лучше описаны с точки зрения радиальных координат. Таким образом, термины "поперечное направление, направление по осям XY или радиальное направление" обозначают аналогичные направления в описанных реализациях, все приблизительно (но не обязательно точно) перпендикулярные направлению по оси Z.
1. Лазерный механизм 100
Лазерный механизм 100 может включать в себя лазер, чтобы испускать лазерные импульсы с предварительно определенными параметрами лазера. Эти параметры лазера могут включать в себя длительность импульса в диапазоне 1 фемтосекунда - 100 пикосекунд или в диапазоне 10 фемтосекунд - 10 пикосекунд, или, в некоторых вариантах осуществления, диапазоне 100 фемтосекунд - 1 пикосекунда. Лазерные импульсы могут иметь энергию в расчете на импульс в диапазоне 0,1-1000 микроДжоулей, в других вариантах осуществления в диапазоне 1-100 микроДжоулей. Импульсы могут иметь частоту повторений в диапазоне 10-100 МГц, в других вариантах осуществления в диапазоне 100-1 МГц. Другие варианты осуществления могут иметь параметры лазера, которые попадают в комбинацию этих пределов диапазона, к примеру, в диапазон длительности импульса 1-1000 фемтосекунд. Параметры лазера для конкретной операции могут быть выбраны в этих широких диапазонах, например, во время предоперационной процедуры или на основе вычисления, которое основано на определенных данных пациента, таких как возраст.
Примеры лазерного механизма 100 могут включать в себя лазеры Nd:glass и Nd:Yag, а также множество других лазеров. Рабочая длина волны лазерного механизма может быть в инфракрасном или в видимом диапазоне. В некоторых вариантах осуществления, рабочая длина волны может быть в диапазоне 700 нм - 2 микрона. В некоторых случаях, рабочая длина волны может быть в диапазоне 1,0-1,1 микрона, например, в инфракрасных лазерах на основе иттербия или неодима.
В некоторых реализациях, параметры лазера лазерных импульсов могут быть регулируемыми и переменными. Параметры лазера могут быть регулируемыми с малым временем переключения, тем самым предоставляя возможность оператору хирургической системы 1 доставки лазерного излучения изменять параметры лазера во время сложной хирургии. Такое изменение параметров может быть инициировано в ответ на считывание посредством подсистемы считывания или визуализации системы 1 доставки лазерного излучения.
Другие изменения параметров могут быть выполнены как часть многоэтапной операции, во время которой система доставки лазерного излучения может быть сначала использована для первой хирургической операции, после чего выполняется вторая отличная хирургическая операция. Примеры включают в себя выполнение сначала одного или более хирургических этапов в области хрусталика глаза, к примеру, этапа капсулотомии, после чего выполняется вторая хирургическая операция в области роговицы глаза. Эти операции могут быть выполнены в различных последовательностях.
Импульсные лазеры с высокой частотой повторения, работающие на частоте повторения импульсов в десятки сотен тысяч импульсов в секунду или выше с относительно низкой энергией в расчете на импульс, могут использоваться для хирургических вариантов применения, чтобы достигать определенных преимуществ. Такие лазеры используют относительно низкую энергию в расчете на импульс, чтобы локализовать воздействие на ткань, вызываемое посредством лазерно-индуцированного фотопробоя. В некоторых реализациях, например, протяженность разрушенной ткани может быть ограничена несколькими микронами или несколькими десятками микронов. Это локализованное воздействие на ткань может повышать точность лазерной хирургии и может требоваться в определенных хирургических операциях. В различных реализациях таких хирургических вмешательств, многие сотни, тысячи или миллионы импульсов могут доставляться в последовательность пятен, которые являются смежными, почти смежными или разделяются посредством управляемых расстояний. Эти реализации позволяют достигать определенных требуемых хирургических эффектов, таких как надрезы, отделения или фрагментация тканей.
Параметры импульсов и шаблон сканирования могут быть выбраны посредством различных способов. Например, они могут быть основаны на предоперационном измерении оптических или структурных свойств хрусталика глаза. Лазерная энергия и разделение пятен также могут быть выбраны на основе предоперационного измерения оптических или структурных свойств хрусталика глаза или на возрастном алгоритме.
2. Модуль 200 предкомпенсации
Фиг. 2 иллюстрирует то, что волновой фронт лазерного луча может отклоняться от идеального поведения несколькими различными способами и по нескольким различным причинам. Большая группа этих отклонений называется аберрациями. Аберрации (и другие искажения волнового фронта) смещают точки действительных изображений от точек идеальных параксиальных гауссовых изображений. Фиг. 2 иллюстрирует волновые фронты света, выходящего через выходной зрачок ExP. Неискаженный сферический волновой фронт G исходит из зрачка и сходится к точке P1 в центре кривизны волнового фронта G. G также называется гауссовой эталонной сферой. Аберрационный волновой фронт W отклоняется от G и сходится к другой точке P2. Аберрация ∆W аберрационного волнового фронта W в точке Q1 может отличаться посредством оптической длины пути относительно неискаженной эталонной сферы G:


В общем, аберрация ∆W зависит от координат как в выходном зрачке, так и в фокальной плоскости. Следовательно, эта аберрация ∆W также может рассматриваться в качестве корреляционной функции: она представляет, что точечное множество, изображение которого сходится к P2, исключенной из P1 на оптической оси посредством r', находится на поверхности W, которая отклоняется от эталонной сферы G на величину ∆W на радиальном расстоянии r в выходном зрачке ExP. Для системы с осевой симметрией ∆W может записываться с точки зрения двойного разложения в степенной ряд в r и r' следующим образом:

Здесь r' является радиальной координатой точки P2 изображения в фокальной плоскости, а r является радиальной координатой точки Q1 в зрачке. Угловая зависимость представляется посредством Θ, сферического угла. n=2p+m является положительным целым числом, и 2l+m a nm являются коэффициентами расширения аберрационного волнового фронта W. Для справки см., например: "Optical Imaging and Aberrations, Part I. Ray Geometrical Optics" автора Virendra N. Mahajan, SPIE Optical Engineering Press. Порядок i члена аберрации предоставляется посредством i=2l+m+n.
Члены вплоть до i=4 связаны с первичными аберрациями: сферической, комой, астигматизмом, кривизной поля и искажением. Фактические взаимосвязи между этими первичными аберрациями и коэффициентами2l+m anm аберрациидокументируются в литературе. Для системы, визуализирующей точечный объект, явная зависимость членов аберрации от радиуса r' изображения может подавляться посредством введения безразмерной переменной ρ=r/a, где a является поперечной линейной протяженностью выходного зрачка, к примеру, его радиусом:

где:

Преимущество этой нотации состоит в том, что коэффициенты

Хотя описание аберрации с точки зрения коэффициентов anm аберрации математически является четко определенным, это не всегда экспериментально самый доступный подход. Следовательно, три альтернативных показателя аберрации описываются после этого.
В этом же русле экспериментальной достижимости и тестируемости, следует отметить, что поведение луча в биологической ткани, к примеру, глазу, может не быть самым простым в измерении. Для помощи, исследования указывают, что лучи внутри глаза могут иметь характер изменения, во многом аналогичный лучам в соленой воде с физиологически надлежащей концентрацией солей, причем они могут быть количественно измерены и описаны. Следовательно, в данной заявке, когда поведение системы доставки лазерного излучения внутри глаза описано, следует понимать, что это описание направлено на поведение либо в описанной глазной ткани, либо в соответствующей соленой воде.
Фиг. 3A-C иллюстрируют второй показатель аберраций. Система 1 доставки лазерного излучения, которая выполнена с возможностью фокусировать луч в фокальной плоскости 210 на глубине A, может вызывать сферическую аберрацию, если она управляется так, что вместо этого фокусирует луч в функциональной фокальной плоскости 211 на глубине B. Эта ситуация может возникать, например, в ходе операции трехмерного сканирования, когда фокусная точка лазерного луча перемещается с фокальной плоскости 210 на фокальную плоскость 211.
Фиг. 3A иллюстрирует случай, когда система 1 доставки лазерного излучения фокусирует лучи на оптимальной фокальной плоскости 210. лучи проходят через пятно на оптимальной фокальной плоскости 210 ("фокальное пятно") очень узкой радиальной протяженности или радиуса, rf(A). Эта радиальная протяженность rf(A) может превышать нуль по множеству причин, например, вследствие дифракции светового луча. Радиус фокального пятна может быть задан несколькими способами. Общая формулировка rf(A) - это минимальный радиус светового пятна на экране по мере того, как положение экрана варьируется вдоль осевого или Z-направления. Эта Z-глубина зачастую называется "точкой наименьшей нерезкости". Эта формулировка дополнительно уточняется относительно фиг. 3C.
Фиг. 3B иллюстрирует случай, когда система 1 доставки лазерного излучения сканирует фокус посредством некоторого расстояния, к примеру, несколько миллиметров, от оптимальной фокальной плоскости 210, к функциональной фокальной плоскости 211. Заметно, лучи проходят через фокальное пятно радиуса rf(B), превышающего rf(A), и вызывают сферическую аберрацию. Выведены математические формулы различной точности, связывающие коэффициенты anm аберрации и радиус rf фокального пятна. В некоторых случаях, радиус rf фокального пятна является экспериментально более доступным показателем для того, чтобы количественно определять аберрации, чем коэффициенты amn аберрации.
Фиг. 3C иллюстрирует дополнительную количественную формулировку радиуса rf фокального пятна. Фиг. 3C иллюстрирует энергию, содержащуюся в пятне радиуса r, измеренного от центроида луча. Общепризнанной формулировкой радиуса rf фокального пятна является радиус, в пределах которого содержится 50% энергии луча. Кривая с меткой "A" показывает, что в луче с ограниченной дифракцией, когда луч фокусируется на своей оптимальной фокальной плоскости 210, как показано на фиг. 3A, 50% процентов энергии луча может содержаться или концентрироваться в пятне радиуса r=0,8 микрон, предоставляя применимую формулировку rf(A).
Хирургические операции на основе лазерно-индуцированного оптического пробоя (LIOB) могут иметь более высокую точность и эффективность и меньшие нежелательные эффекты, если энергия лазерного луча выделяется в явно или четко заданном фокальном пятне. LIOB является высоко-нелинейным процессом с пороговым значением интенсивности (плазмы): типично, ткань, подвергаемая воздействию луча с интенсивностью, превышающей пороговое значение плазмы, превращается в плазму, тогда как ткань, подвергаемая воздействию луча с интенсивностью ниже порогового значения плазмы, не подвергается плазменному переходу. Следовательно, расширение фокального пятна посредством аберрации уменьшает долю луча, которая достигает интенсивности на фокальной плоскости, превышающей пороговое значение плазмы, и увеличивает долю луча, интенсивность которой остается ниже порогового значения. Эта вторая доля луча не поглощается эффективно посредством ткани-мишени и продолжает распространяться через глазную ткань, в большинстве случаев к сетчатке глаза, потенциально приводя к нежелательному облучению сетчатки глаза.
Для хирургических операций, направленных на коррекцию роговицы, фокальная плоскость типично сканируется или сдвигается в направлении по оси Z (вдоль оптической оси) только приблизительно на 0,6 мм от оптимальной или номинальной глубины, поскольку толщина роговицы по существу составляет 0,6 мм, редко больше, но при этом не превышает 1 мм. Кривая с меткой "B" иллюстрирует то, что когда фокальная плоскость луча сдвигается от оптимальной фокальной плоскости 210 на 1 мм (оценка сверху для операций на роговице) к функциональной фокальной плоскости 211, 50% энергии луча содержатся в радиусе фокального пятна rf(B)=1,8 микронов. Хотя этот сдвиг вводит аберрацию, но ее размер ограничен. Соответственно, некоторые существующие лазерные системы для операций на роговице вообще не компенсируют эту аберрацию, в то время как другие вводят только некоторый ограниченный уровень компенсации.
Помимо коэффициентов amn аберрации и радиуса rf фокального пятна, третьим показателем аберраций является так называемый коэффициент S Штреля. Коэффициент S Штреля в системе может быть задан со ссылкой на луч, который исходит из точечного источника света, в качестве пиковой интенсивности луча в фокальной плоскости системы, деленной на теоретическую максимальную пиковую интенсивность эквивалентной идеальной системы визуализации, которая работает на пределе дифракции. Эквивалентные формулировки также являются известными в литературе и находятся в пределах формулировки коэффициента S Штреля.
Согласно этой формулировке, чем меньше значение S, тем больше аберрация. Неаберрационный луч имеет S=1, и традиционно, когда S>0,8, говорят, что система визуализации имеет ограниченную дифракцию.
Четвертой формулировкой аберраций является ω, (среднеквадратичная или RMS) ошибка волнового фронта, которая выражает отклонение ∆W аберрационного волнового фронта W от неискаженного волнового фронта G по фиг. 2, усредненное по всему волновому фронту в выходном зрачке ExP. Ω выражается в единицах длины волны луча, что делает ее безразмерной величиной.
Фиг. 4 иллюстрирует то, что для относительно небольших аберраций ω и S связаны посредством следующей эмпирической формулы:

независимо от типа аберрации, где e является основанием натурального логарифма.
Все четыре из вышеуказанных показателей аберрации являются полезными для диагностирования проблем и оптимизации конструкции системы 1 доставки лазерного излучения. Соответственно, нижеприведенный общий термин "показатель аберрации" может означать любой из этих показателей или их эквивалентов. А именно, увеличение аберрации захватывается посредством увеличения коэффициентов amn аберрации, радиуса rf фокального пятна и RMS-ошибки ω волнового фронта, но посредством снижения коэффициента S Штреля.
Взаимосвязь между этими показателями аберрации демонстрируется посредством показа коэффициента a40 сферической аберрации и соответствующего коэффициента S Штреля в конкретном примере. В примере, хирургическая лазерная система фокусирует лазерный луч в глазной ткани при различных глубинах ниже своей поверхности. Лазерный луч имеет ограниченную дифракцию с длиной волны в 1 микрометр и числовой апертурой NA=0,3 и фокусируется на поверхности ткани под обычным углом падения. Числа в этом примере могут быть аналогичными эффектам добавления плоскопараллельной пластины толщины, равной сканированной глубине около фокальной плоскости системы, и выполнения вычисления для соленой воды.
Поверхность ткани вводит аберрации в луче, отличающиеся посредством уравнений (2) и (3). Сферическая аберрация, отличающаяся посредством коэффициента a40 аберрации, является нулевой на поверхности, а коэффициент Штреля, вследствие самой конструкции, - это S=1.
Хирургии на основе лазерной коррекции зрения по методу LASIK типично формируют клапаны на глубине 0,1 мм. При этих глубинах коэффициент S Штреля уменьшается приблизительно до 0,996, только небольшое снижение. Даже при глубинах в 0,6 мм, приблизительно на задней поверхности роговицы, S составляет приблизительно 0,85. Хотя это не является пренебрежимо малым снижением пиковой интенсивности, но оно по-прежнему может компенсироваться посредством регулирования интенсивности лазерного луча.
С другой стороны, при глубинах в 5 мм, отличающих переднюю поверхность хрусталика глаза внутри глаза, коэффициент Штреля может снижаться до S=0,054. При такой глубине и коэффициенте Штреля, интенсивность луча уменьшается значительно ниже порогового значения плазмы, и тем самым луч не позволяет формировать LIOB. Эти радикальные потери пиковой интенсивности не могут компенсироваться посредством увеличения мощности лазера без нежелательных эффектов, таких как серьезное повышенное облучение сетчатки глаза или чрезмерно увеличенный размер пузырьков.
Таблица 1 иллюстрирует сферическую аберрацию a40, соответствующую вышеописанным коэффициентам Штреля. Видимо, сферическая аберрация увеличивается приблизительно линейно с глубиной ткани, тогда как коэффициент S Штреля имеет нелинейное поведение:
В хирургических операциях, направленных на выполнение лизиса хрусталика глаза, капсулотомии или других хирургических операций на хрусталике глаза, фокальная плоскость зачастую сканируется через всю глубину хрусталика глаза, которая может составлять почти 5 мм. Кроме того, в интегрированных системах роговицы-хрусталика глаза, общая глубина сканирования может идти от роговицы до задней поверхности хрусталика глаза, приблизительно на 10 мм. Кривая с меткой "C" на фиг. 3C указывает, что в таких случаях радиус фокального пятна возрастает до rf(C)=18 микронов, причем это значение является слишком большим, чтобы даже отображаться на одном графике с rf(A) и rf(B). В некоторых вариантах осуществления, оптимальная фокальная плоскость может выбираться как находящаяся в середине диапазона сканирования с определенной глубиной, и лазерный луч может сканироваться в диапазоне глубин плюс/минус 5 мм. В этом случае rf(C) может быть уменьшен до 10 микронов.
Эти большие значения rf(C) преобразуются в большую величину аберрации в других трех показателях a40, S и ω аберрации. Безусловно, в отличие от операций на роговице, которые сканируют только несколько десятых долей миллиметра, эти большие аберрации хирургии хрусталика глаза ставят множество проблем относительно конструкции системы 1 доставки лазерного излучения, чтобы компенсировать или управлять их нежелательными последствиями.
Чтобы разрешать проблему больших показателей аберрации, ассоциированных с хирургией хрусталика глаза, некоторые варианты осуществления включают в себя модуль 200 предкомпенсации, чтобы предкомпенсировать сферическую аберрацию и улучшать показатели аберрации. Эти аберрации могут формироваться в ткани-мишени или вдоль части оптического пути в системе 1 доставки лазерного излучения либо вдоль всего оптического пути.
Фиг. 5 иллюстрирует (масштаб не выдержан) то, что поскольку показатели rf(C), a40, S и ω аберрации зависят от глубины z фокального пятна и ее радиального расстояния r от оптической оси, в дальнейшем, когда описывается то, что показатель аберрации допускает значение, это означает показатель аберрации, допускающий описанное значение в некоторых выбранных опорных точках. Набор релевантных опорных точек может быть описан посредством цилиндрических координат (z, r): P1=(0,0), P2=(2,6), P3=(5,0), P4=(8,0), P5=(8,3), в миллиметрах. Поскольку главные структуры глаза демонстрируют аппроксимированную цилиндрическую симметрию, эти P опорных точек могут находиться под любым азимутальным углом ϕ. Следовательно, эти P точек указываются ссылкой только посредством двух из трех цилиндрических координат, при этом азимутальный угол ϕ подавляется. P1 является типичной точкой для операции на роговице по центру, P2 является типичной для операций на роговице в периферии, P3 связана с передней областью хрусталика глаза, P4 связана с задней частью хрусталика глаза, а P5 является опорной точкой на периферии хрусталика глаза. Другие опорные точки также могут приспосабливаться, чтобы отличать аберрации системы доставки лазерного излучения. В некоторых случаях, показатель аберрации может означать показатель аберрации, усредненный по функциональному волновому фронту или облучаемой области.
Показатели аберрации могут быть определены несколькими различными способами. Волновой фронт лазерного луча может отслеживаться в процессе автоматизированного проектирования (CAD) через выбранный сегмент оптического пути, к примеру, модель ткани-мишени, или сегмент системы 1 доставки лазерного излучения. Альтернативно, аберрация лазерного луча может быть измерена в фактической системе доставки лазерного излучения или в комбинации этих двух операций.
Соответственно, в некоторых реализациях предкомпенсация, введенная посредством модуля 200 предкомпенсации, может быть выбрана посредством определения, вычисления или измерения показателя аберрации вдоль выбранной части оптического пути, которая может включать в себя саму ткань-мишень, и последующего определения величины предкомпенсации, которая необходима, чтобы компенсировать заранее выбранную часть определяемой/вычисляемой/измеряемой аберрации.
Модуль 200 предкомпенсации может эффективно корректировать или предкомпенсировать сферическую аберрацию, поскольку сферические аберрации преимущественно влияют на осевые лучи. Другие типы аберраций, к примеру, поперечные аберрации, астигматизм и кома, влияют на лучи с ненулевым углом, а также на полевые лучи, включающие в себя лучи, смещенные от оптической оси. Хотя лазерный луч, сформированный посредством лазерного механизма 100, является по существу осевым лучом, различные блоки в оптическом пути, а именно, XY-сканер 300, преобразуют этот осевой луч в луч с ненулевым углом, имеющий полевые лучи.
Следовательно, в конструкциях, в которых модуль предкомпенсации размещается после XY-сканера 300, полевые лучи луча могут формировать несколько различных аберраций. Это появление различных аберраций приводит к большим конструктивным сложностям, поскольку (i) оптимизация луча может требовать компенсации нескольких из аберраций, и (ii) различные типы аберраций не являются независимыми друг от друга. Таким образом, компенсация одного типа аберрации типично накладывает нежелательные другие типы аберрации.
Следовательно, в архитектурах, в которых модуль компенсации размещается после XY-сканера, сферические аберрации типично компенсируются только до ограниченного уровня и за счет введения других типов нежелательных аберраций.
Напротив, варианты осуществления настоящей системы 1 доставки лазерного излучения могут иметь модуль 200 предкомпенсации перед XY-сканером 300. Эта конструкция дает возможность модулю 200 предкомпенсации предкомпенсировать сферическую аберрацию без введения других типов нежелательных аберраций.
Некоторые реализации могут даже использовать вышеуказанную взаимозависимость осевых и внеосевых аберраций посредством введения осевой предкомпенсации посредством модуля 200 предкомпенсации, чтобы предкомпенсировать внеосевую аберрацию, вызываемую посредством последующего сегмента системы доставки лазерного излучения или ткани-мишени.
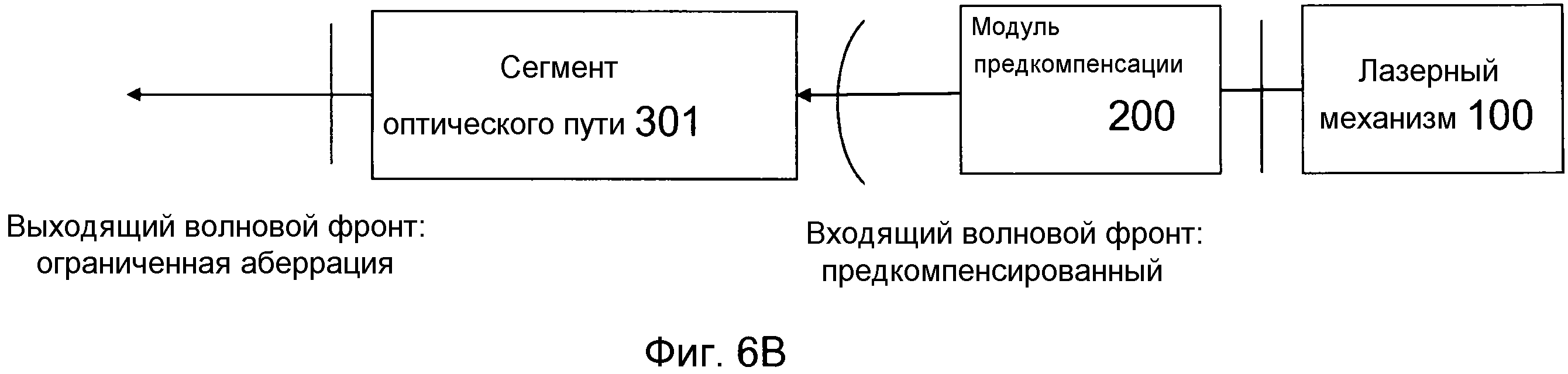
Фиг. 6A-B схематично иллюстрируют идеализированную работу модуля 200 предкомпенсации.
Фиг. 6A иллюстрирует систему 1 доставки лазерного излучения без модуля предкомпенсации. В общем, сегмент 301 оптического пути может вводить некоторый уровень сферической аберрации. Это показывается посредством неискаженного волнового фронта, входящего в сегмент 301 оптического пути, и волнового фронта с аберрацией, выходящего из сегмента 301 оптического пути. Этот сегмент может быть любым сегментом оптического пути, таким как часть ткани-мишени или вся ткань-мишень, или часть пути в системе 1 доставки лазерного излучения.
Фиг. 6B иллюстрирует то, что модуль 200 предкомпенсации может вводить компенсационное (или комплементарное) искажение волнового фронта. Этот предкомпенсированный волновой фронт затем входит в сегмент 301 оптического пути, и в итоге выводится волновой фронт с уменьшенным искажением или даже без искажения.
Некоторые существующие системы вообще не имеют выделенного модуля компенсации. Другие системы могут компенсировать сферическую аберрацию только распределенно посредством линз из групп линз, которые также имеют другие функции и размещаются после XY-сканера. В этих существующих системах параметры линз выбираются в результате нахождения компромиссов между различными функциональностями, приводя к ограничениям на их производительность.
Напротив, варианты осуществления системы 1 доставки лазерного излучения могут иметь выделенный модуль 200 предкомпенсации, расположенный перед XY-сканером 300. В некоторых вариантах осуществления, модуль 200 предкомпенсации является первым оптическим модулем или группой линз, которая принимает лазерный луч из лазерного механизма 100. Поскольку вследствие своего местоположения лазерный луч достигает модуля 200 предкомпенсации без формирования лучей с ненулевым углом или полевых лучей (которые могут вызываться посредством XY-сканера 300), эти варианты осуществления позволяют достигать высокого уровня предкомпенсации. Предкомпенсация также является эффективной, поскольку она является первичной функцией модуля 200 предкомпенсации, и тем самым конструктивные компромиссы могут поддерживаться очень ограниченными, в противоположность существующим системам, которые компенсируют с помощью линз, выполняющих дополнительные функции.
По этим причинам, в таких реализациях можно корректировать сферическую аберрацию в высокой степени без затрагивания или ввода других типов аберраций.
В теории аберраций известно, что сферическая аберрация составной системы линз приблизительно является суммой сферических аберраций отдельных компонентов. Следовательно, в некоторых реализациях системы 1 доставки лазерного излучения, нежелательная величина сферической аберрации может предкомпенсироваться посредством выполнения модуля 200 предкомпенсации с возможностью вводить равную величину аберрации, но с противоположным знаком.
В качестве примера, когда глубина фокального пятна в глазной ткани перемещается на 5 мм от оптимальной фокальной плоскости, сферическая аберрация a40 (согласно таблице 1) составляет -2,0 микрометра. Соответственно, в некоторых реализациях модуль 200 предкомпенсации может вводить показатель аберрации a40=+2,0 микрометра. В первой аппроксимации эта предкомпенсация может по существу исключать сферическую аберрацию, вызываемую посредством сдвига на 5 мм фокального пятна, и, соответственно, увеличивать коэффициент Штреля с S=0,054 обратно до S=1. (Этот простой пример игнорирует другие источники аберраций).
Некоторые реализации отличаются посредством сравнения показателей аберрации "непредкомпенсированных" систем 1 доставки лазерного излучения, т.е. систем доставки лазерного излучения, в которых модуль 200 предкомпенсации исключен, с "предкомпенсированными" системами доставки лазерного излучения, т.е. системами, в которых модуль 200 предкомпенсации не исключен.
В некоторых реализациях, установка модуля 200 предкомпенсации позволяет увеличивать коэффициент Штреля со значения S
Как указано выше, этот коэффициент S Штреля здесь и далее может означать любой из коэффициентов S(P1),..., S(P5) Штреля в пяти опорных точках P1-P5 выше или коэффициент Штреля в некоторых других предварительно определенных опорных точках, или среднее коэффициентов Штреля по этим пяти опорным точкам, или среднее по функциональному волновому фронту.
Кроме того, коэффициент Штреля может ссылаться на всю систему 1 доставки лазерного излучения, от приема лазерного луча из лазерного механизма 100, общей работы объектива 700 и до формирования фокального пятна в глазной ткани-мишени. В некоторых других случаях термин может ссылаться на другие цели, в том числе воздух. В некоторых реализациях, термин может ссылаться на подсистему системы 1 доставки лазерного излучения.
В некоторых реализациях, добавление модуля 200 предкомпенсации к непредкомпенсированной системе 1 доставки лазерного излучения позволяет увеличивать коэффициент Штреля с непредкомпенсированного значения ниже S=S(precomp) до предкомпенсированного значения выше S=S(precomp) для импульсов, имеющих ассоциированную полосу пропускания, по меньшей мере, с порядком величины, превышающим ограниченную полосу пропускания преобразования лазерных импульсов с длительностью в пикосекунду или более. Как описано выше, S(precomp) может составлять, например, 0,6, 0,7, 0,8 или 0,9.
В некоторых реализациях, добавление модуля 200 предкомпенсации к системе 1 доставки лазерного излучения позволяет увеличивать коэффициент Штреля с непредкомпенсированного значения ниже S=S(precomp) до предкомпенсированного значения выше S=S(precomp) в диапазоне длин волн 0,4-1,1 микрона. Как описано выше, S(precomp) может составлять, например, 0,6, 0,7, 0,8 или 0,9.
В некоторых реализациях, добавление модуля 200 предкомпенсации позволяет увеличивать системную числовую апертуру с непредкомпенсированного значения ниже NA=NA(precomp), соответствующего системе 1 доставки лазерного излучения без модуля 200 предкомпенсации, до предкомпенсированного значения выше NA=NA(precomp) с помощью модуля 200 предкомпенсации. В некоторых реализациях, значение NA(precomp) может составлять, например, 0,2, 0,25, 0,3 или 0,35.
В некоторых реализациях, добавление модуля 200 предкомпенсации к системе 1 доставки лазерного излучения без него позволяет уменьшать радиус rf фокального пятна в ткани-мишени с непредкомпенсированного значения выше rf(precomp) до предкомпенсированного значения ниже rf(precomp), соответствующего системе 1 доставки лазерного излучения с модулем 200 предкомпенсации. В некоторых реализациях, rf(precomp) может составлять 2, 3 или 4 микрона.
В некоторых реализациях, установка модуля 200 предкомпенсации позволяет увеличивать RMS-ошибку волнового фронта со значения ω>ω(precomp) непредкомпенсированной системы 1 доставки лазерного излучения до значения ω<ω(precomp) для предкомпенсированной системы 1 доставки лазерного излучения. В некоторых реализациях, ω(precomp) может составлять, например, 0,06, 0,07, 0,08 или 0,09, в единицах длины волны лазерного луча.
В некоторых реализациях, установка модуля 200 предкомпенсации позволяет увеличивать коэффициент сферической аберрации со значения a40>a40(precomp) непредкомпенсированной системы 1 доставки лазерного излучения до значения a40
В некоторых реализациях, установка модуля 200 предкомпенсации в непредкомпенсированную систему 1 доставки лазерного излучения может уменьшать, по меньшей мере, один из следующих показателей аберрации: RMS-ошибка ω волнового фронта, показатель a40 сферической аберрациии радиус rf фокального пятна с непредкомпенсированного значения посредством, по меньшей мере, процентного отношения P(precomp) предкомпенсации, или увеличивать коэффициент S Штреля посредством, по меньшей мере, процентного отношения P(precomp) предкомпенсации. В некоторых реализациях, P(precomp) может составлять, например, 10% или 20%, или 30%, или 40%.
Как описано выше, любой из этих показателей аберрации может принадлежать любой из опорных точек P1,..., P5 или некоторым другим предварительно определенным опорным точкам или среднему значений в опорных точках или может быть средним по волновому фронту.
В некоторых вариантах осуществления, модуль 200 предкомпенсации также может компенсировать несферические аберрации, к примеру, аберрации первого или высшего порядка. В некоторых случаях, он также может выполнять предкомпенсацию внеосевых лучей.
В некоторых реализациях, модуль 200 предкомпенсации предкомпенсирует другие типы аберраций без увеличения RMS-ошибки волнового фронта посредством более 0,075 или посредством поддержания коэффициента Штреля выше S(precomp), имеющего значение, например, в 0,8.
В некоторых реализациях, модуль 200 предкомпенсации позволяет увеличивать радиус луча rb, выходящего из модуля 200 предкомпенсации, до значения выше rb=rb(precomp), где rb(precomp) может составлять, например, 5 мм или 8 мм.
Некоторые из этих функциональностей могут быть достигнуты посредством включения одной или более подвижных линз в модуль 200 предкомпенсации. Актуаторы положения могут перемещать подвижную линзу или линзы, изменяя расстояние между некоторыми линзами модуля 200 предкомпенсации.
В реализациях с одной подвижной линзой подвижная линза модуля 200 предкомпенсации может перемещать фокальную плоскость или пятно системы 1 доставки лазерного излучения вдоль оптической оси посредством 0,3-4,0 мм. В некоторых других реализациях, посредством 0,5-2,0 мм.
В некоторых реализациях, когда, по меньшей мере, один из коэффициентов S(low) Штреля в вышеописанных пяти опорных точках P1,..., P5 ниже S=S(movable), когда подвижная линза находится в среднем положении, подвижная линза может перемещаться, чтобы увеличивать коэффициент S(low) Штреля до значения выше S=S(movable). S(movable) может составлять 0,6, 0,7, 0,8 или 0,9.
В некоторых реализациях, подвижная линза может перемещаться, чтобы варьировать коэффициент S Штреля в диапазоне 0,6-0,9. В другой реализации в диапазоне 0,70-0,85.
Поскольку модуль 200 предкомпенсации находится перед XY-сканером 300 или другими расширителями луча, радиус луча по-прежнему является небольшим. Следовательно, подвижная линза может быть небольшой. Поскольку подвижная линза является небольшой, актуаторы положения могут перемещать ее очень быстро, предоставляя возможность очень быстрого изменения глубины фокуса. Этот признак ускоряет сканирование с определенной глубиной или Z-сканирование в этих вариантах осуществления и позволяет делать скорость Z-сканирования сравнимой с типично большей скоростью XY-сканирования.
В некоторых типичных существующих системах аберрации компенсируются преимущественно посредством такого оптического средства, как линзы. Текущий описанный модуль 200 предкомпенсации с подвижными линзами может использовать быструю подвижную линзу или линзы, чтобы оптимально выполнять эту функцию. В частности, когда лазерный луч сканируется с помощью XY-сканера 300, подвижная линза или линзы могут перемещаться с достаточно высокой скоростью, так что аберрации, ассоциированные с XY-сканированием, компенсируются до требуемого уровня.
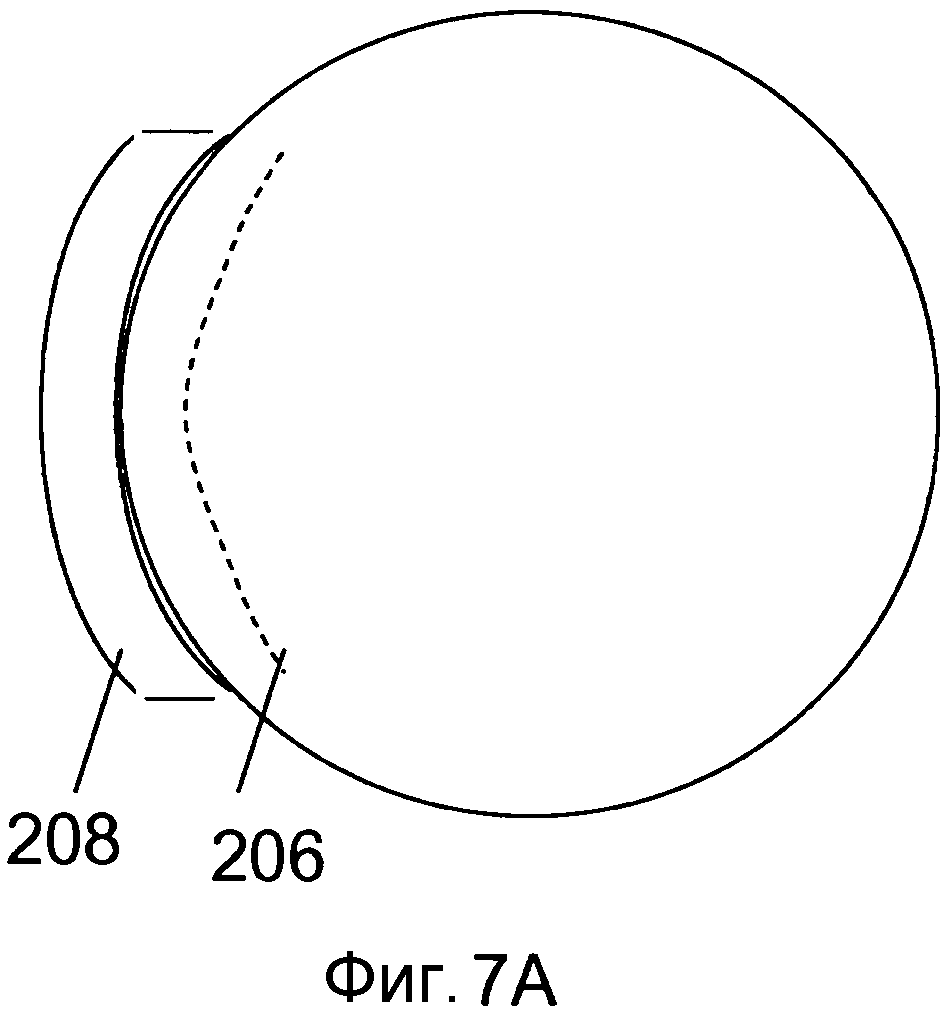
Фиг. 7A иллюстрирует то, что этот аспект может быть полезным, когда поперечный хирургический разрез 206 выполняется, по существу отслеживая контактную поверхность плоского или искривленного интерфейса 208 пациента. Скорость небольшой подвижной линзы позволяет выполнять Z-сканирование со скоростью, требуемой посредством XY-сканирования, формируя требуемый искривленный разрез.
В некоторых реализациях, кривизна или радиус искривленного разреза либо искривленной целевой линии может быть меньше 1 мм, 10 мм и 100 мм.
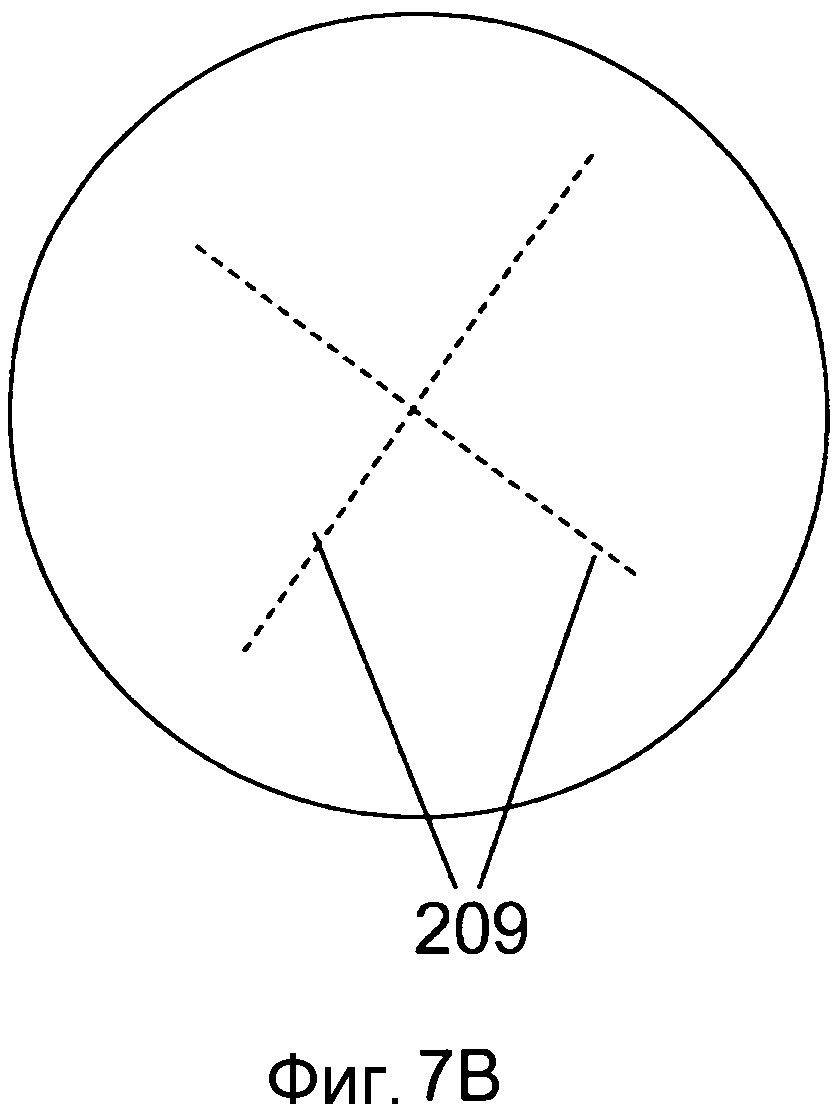
Фиг. 7B иллюстрирует другой полезный аспект высокой скорости Z-сканирования. Фокальная плоскость большинства оптических систем в определенной степени искривлена. Если требуется формировать по существу прямой секущий разрез, который, следовательно, не отслеживает кривизну фокальной плоскости, глубина фокуса должна быть непрерывно повторно отрегулирована, синхронно с быстрым поперечным XY-сканированием, чтобы компенсировать кривизну фокальной плоскости. Например, для радиальных разрезов или плоских разрезов с шаблоном растрового сканирования изменение радиальной координаты или XY координаты может быть очень быстрым. В этих операциях высокая скорость Z-сканирования может помогать формированию требуемого прямого разреза.
В завершение, высокая скорость Z-сканирования также может быть полезной, чтобы быстро выполнять некоторые хирургические операции, к примеру, операции на роговице.
В некоторых реализациях, модуль 200 предкомпенсации с подвижными линзами может изменять глубину фокального пятна системы доставки лазерного излучения с осевой скоростью, по меньшей мере, в 5% от максимальной скорости поперечного сканирования фокального пятна. В некоторых реализациях, с осевой скоростью, по меньшей мере, в 10% от максимальной скорости поперечного сканирования фокального пятна. В других вариантах осуществления, с осевой скоростью, по меньшей мере, в 20% от максимальной скорости поперечного сканирования фокального пятна.
В некоторых реализациях, модуль 200 предкомпенсации с подвижными линзами может изменять координату Z фокального пятна посредством 0,5-1 миллиметра во время Z-сканирования.
В некоторых реализациях, это время Z-сканирования может находиться в пределах 10-100 наносекунд, 100 наносекунд - 1 миллисекунда, 1 миллисекунда - 10 миллисекунд и 10 миллисекунд - 100 миллисекунд.
В некоторых реализациях, подвижная линза группы линз является подвижной в Z-диапазоне перемещения, чтобы уменьшать первый показатель аберрации посредством, по меньшей мере, процентного отношения P(movable) подвижных элементов. Здесь первый показатель аберрации может быть коэффициентом a40 сферической аберрации, RMS-ошибкой ω волнового фронта и радиусом rf фокального пятна; и процентное отношение P(movable) подвижных элементов может составлять 10%, 20%, 30% и 40%.
В некоторых реализациях, подвижная линза группы линз является подвижной в Z-диапазоне перемещения, чтобы увеличивать коэффициент S Штреля посредством, по меньшей мере, процентного отношения P(movable) подвижных элементов, которое может составлять 10%, 20%, 30% и 40%.
В некоторых реализациях, модуль 200 предкомпенсации с подвижными линзами допускает изменение числовой апертуры NA системы 1 доставки лазерного излучения, Z-глубины фокального пятна, любого из показателей аберрации и диаметра луча по существу независимо посредством перемещения подвижной линзы. Другими словами, перемещение подвижной линзы допускает варьирование любой из этих четырех характеристик системы 1 доставки лазерного излучения без изменения других двух характеристик. Эти варианты осуществления предлагают существенную степень управления для оператора варианта осуществления.
Некоторые функции модуля 200 предкомпенсации иногда упоминаются в качестве расширения луча или приведения к требуемым параметрам луча. Соответственно, в некоторых существующих системах блоки с аналогичными функциями упоминаются как модуль приведения к требуемым параметрам луча или расширители луча.
В некоторых вариантах осуществления, модуль 200 предкомпенсации включает в себя всего одну линзу, чтобы достигать вышеуказанных функциональностей.
В некоторых вариантах осуществления, модуль 200 предкомпенсации включает в себя две-пять линз, чтобы достигать вышеуказанных функциональностей.
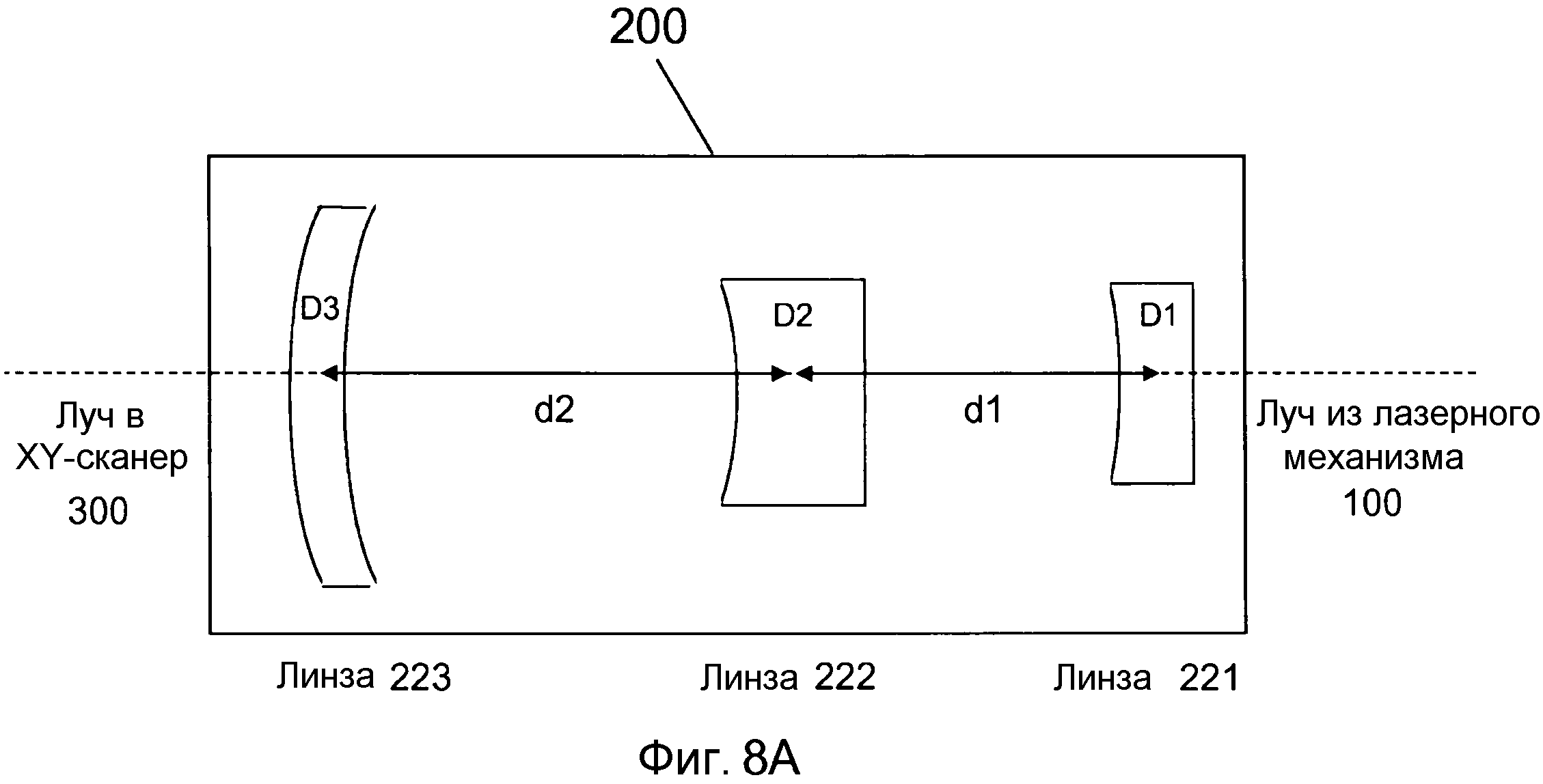
Фиг. 8A иллюстрирует вариант осуществления с тремя линзами модуля 200 предкомпенсации, включающего в себя линзу 221, линзу 222 и линзу 223.
Фиг. 8B иллюстрирует вариант осуществления с тремя линзами модуля 200 предкомпенсации с подвижными линзами', включающего в себя линзу 221', подвижную линзу 222' и линзу 223'.
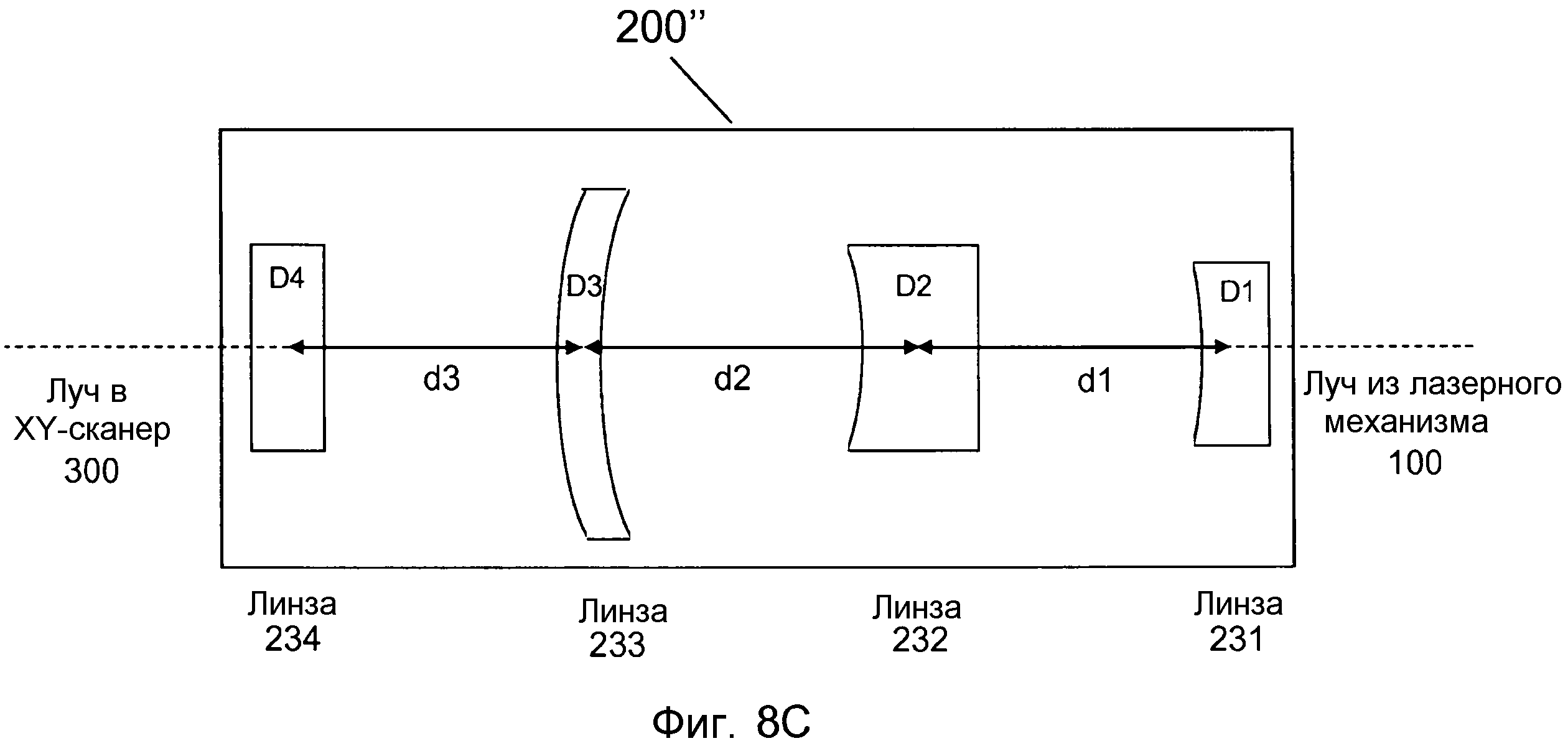
Фиг. 8C иллюстрирует вариант осуществления с четырьмя линзами модуля 200'' предкомпенсации, включающего в себя линзы 231-234.
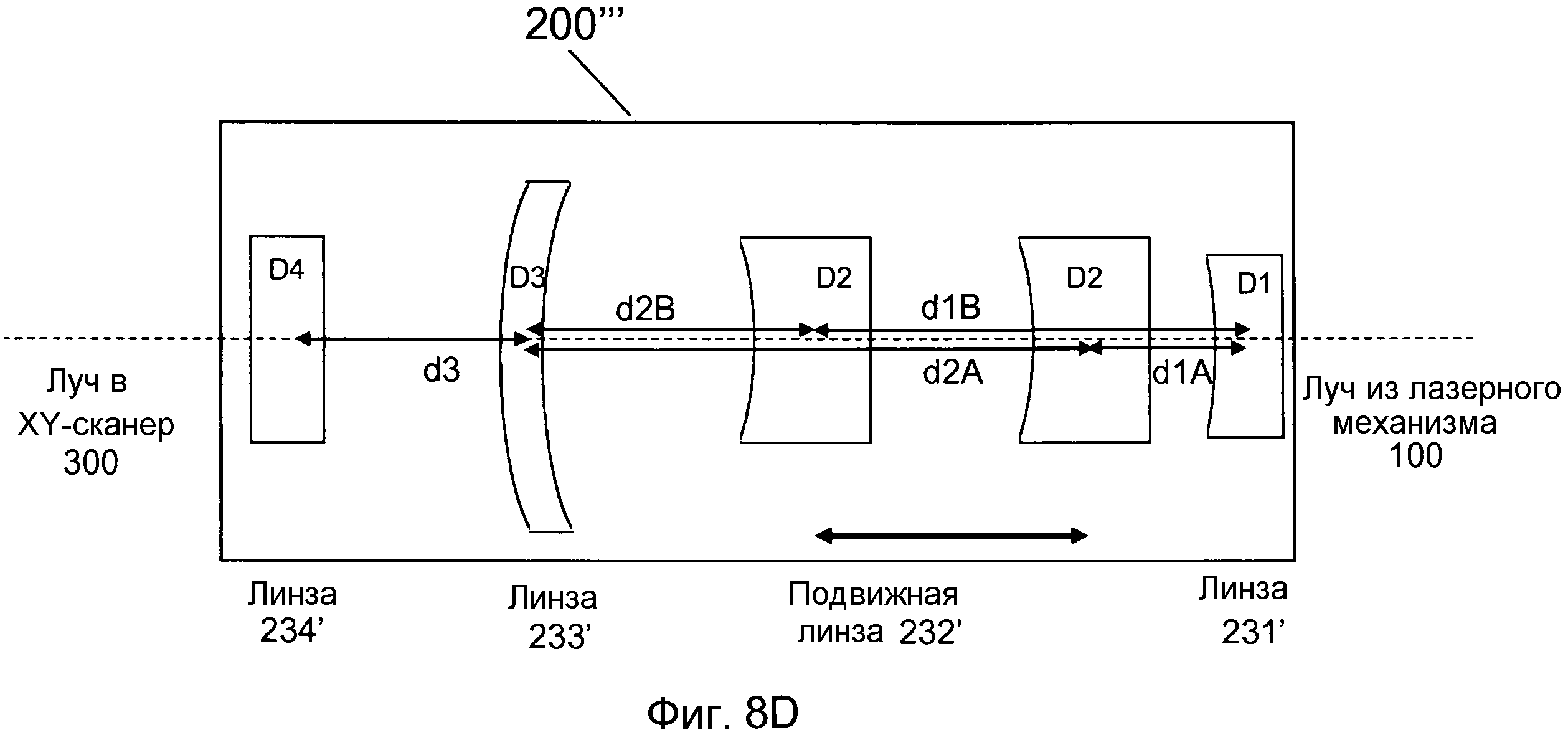
Фиг. 8D иллюстрирует вариант осуществления с четырьмя линзами модуля 200''' предкомпенсации с подвижными линзами, включающего в себя линзу 231', подвижную линзу 232', линзу 233' и линзу 234'.
Таблицы 2-4 иллюстрируют различные реализации с тремя линзами модулей 200 и 200' предкомпенсации по фиг. 8A-B. Варианты осуществления модуля 200 предкомпенсации могут быть реализованы с использованием тонких линз. Следовательно, они могут быть описаны с точки зрения сил рефракции отдельных линз и их расстояний от следующей линзы.
Таблица 2 иллюстрирует вариант осуществления с тремя неподвижными линзами модуля 200 предкомпенсации, также показанного на фиг. 8A. В таблице 2 столбец 1 показывает номер линзы, столбец 2 - преломляющую способность (силу рефракции), измеренную в диоптриях Di (i=1, 2, 3), а столбец 3 - расстояние di (i=1, 2) между линзами i и i+1.
Таблица 3 иллюстрирует возможную реализацию модуля 200' предкомпенсации с двумя подвижными линзами 222' и 223', как показано на фиг. 8B, показывающую разнесения diA и diB между линзами в двух конфигурациях A и B в столбцах 3 и 4. Разнесения di между линзами могут непрерывно варьироваться между diA и diB.
Таблица 4 иллюстрирует то, что в различных реализациях вышеуказанные параметры Di и di могут допускать значения в широких интервалах, в зависимости от большого числа конструктивных соображений, таких как различные размеры луча и доступное пространство. Некоторые параметры этих реализаций могут быть связаны с вариантами осуществления таблиц 2-3 посредством масштабирования: преломляющих способностей с коэффициентом a масштабирования и расстояний с соответствующим коэффициентом масштабирования 1/a. Кроме того, преломляющие способности могут быть дополнительно модифицированы посредством коэффициентов t1-t3 допуска, чтобы предоставлять возможность отличий в допусках и конструктивных реализациях. Эти взаимосвязи обобщаются в таблице 4:
В некоторых реализациях, коэффициент a масштабирования может находиться в пределах 0,3-3, а коэффициенты t1, t2 и t3 допуска могут находиться в пределах 0,8-1,2.
Аналогично, таблица 5 иллюстрирует различные реализации с четырьмя линзами модуля 200'' предкомпенсации, в которых линзы 231, 232, 233 и 234 являются неподвижными, как показано на фиг. 8C.
Таблица 6 Иллюстрирует реализацию с четырьмя линзами модуля 200''' предкомпенсации по фиг. 8D, с одной подвижной линзой 232'.
Аналогично реализациям с тремя линзами, параметры модулей 200'' и 200''' предкомпенсации c четырьмя линзами могут допускать значения в широких диапазонах. Параметры некоторых из этих реализаций так же могут быть связаны друг с другом посредством коэффициентов a масштабирования, 1/a, t1, t2, t3 и t4, соответственно, аналогично таблице 4. Коэффициент a масштабирования может находиться в пределах 0,2-5, а коэффициенты t1,..., t4 допуска могут находиться в пределах 0,7-1,3.
В других вариантах осуществления, используются другие комбинации и диапазоны. В этих диапазонах являются возможными много вариантов осуществления системы 1 доставки лазерного излучения, поскольку система может быть оптимизирована для многих различных функциональностей, приводящих к различным выборам. Конструктивные компромиссы и ограничения оптимизации могут приводить к большому числу реализаций, каждая из которых имеет собственные преимущества. Большое число возможностей проиллюстрировано посредством диапазонов параметров в вышеуказанных таблицах 2-6.
В одной реализации с подвижными линзами модуля 200' предкомпенсации подвижная линза может изменять одну из характеристик лазерной системы по существу независимо. Эти параметры включают в себя глубину Z-фокуса, числовую апертуру NA, любой из показателей аберрации и диаметр выходного луча. Например, эти реализации позволяют оператору изменять, к примеру, числовую апертуру системы 1 доставки лазерного излучения без изменения, к примеру, глубины Z-фокуса.
В некоторых реализациях, модуль 200 предкомпенсации имеет два независимо перемещающихся элемента. Такие реализации позволяют оператору независимо управлять двумя характеристиками лазерного луча, такими как, например, диаметр луча и числовая апертура NA, при поддержании аберраций фиксированными.
Фиг. 9 иллюстрирует пример другой системы 1' доставки лазерного излучения, в которой функциональность Z-сканирования различных оптических блоков выделяется. В частности, лазерный механизм 100 формирует лазерный луч, который принимается посредством первого Z-сканера 250. Первый Z-сканер 250 принимает лазерный луч из лазерного механизма 100 и сканирует фокусную точку системы 1' доставки лазерного излучения в первом Z-интервале вдоль оптической оси системы 1' доставки лазерного излучения. Луч, выведенный посредством первого Z-сканера 250, принимается посредством XY-сканера 300, который сканирует лазерный луч в направлении, по существу поперечном к оптической оси лазерной системы. Выводимый XY-сканированный лазерный луч затем принимается посредством второго Z-сканера 450, который сканирует фокусную точку лазерной системы во втором Z-интервале вдоль оптической оси лазерной системы.
В некоторых вариантах осуществления, первый Z-сканер 250 конфигурируется так, что первый Z-интервал является подходящим для хирургической операции на роговице, а второй Z-сканер 450 конфигурируется так, что второй Z-интервал является подходящим для хирургической операции на переднем сегменте.
В некоторых вариантах осуществления, первый Z-интервал находится в диапазоне 0,05-1 мм, и второй Z-интервал находится в диапазоне 1-5 мм.
В некоторых вариантах осуществления, первый Z-интервал находится в диапазоне 1-5 мм, и второй Z-интервал находится в диапазоне 5-10 мм.
В некоторых вариантах осуществления, первый Z-сканер 250 выполнен с возможностью сканировать фокусную точку в первом Z-интервале 0,05-1 мм в первое время Z-сканирования. Первое время Z-сканирования может быть в одном из диапазонов 10-100 наносекунд, 100 наносекунд - 1 миллисекунда, 1 миллисекунда - 10 миллисекунд и 10 миллисекунд - 100 миллисекунд.
В некоторых вариантах осуществления, второй Z-сканер 450 выполнен с возможностью сканировать фокусную точку во втором Z-интервале 1-5 мм во второе время Z-сканирования. Второе время Z-сканирования может быть в одном из диапазонов 10-100 миллисекунд и 100 миллисекунд - 1 секунда.
В некоторых вариантах осуществления, первый Z-сканер 250 выполнен с возможностью изменять числовую апертуру лазерного луча более чем на 10%.
В некоторых вариантах осуществления, второй Z-сканер 450 выполнен с возможностью изменять числовую апертуру лазерного луча более чем на 10%.
В некоторых вариантах осуществления, первый Z-сканер 250 выполнен с возможностью изменять числовую апертуру лазерного луча более чем на 25%.
В некоторых вариантах осуществления, второй Z-сканер 450 выполнен с возможностью изменять числовую апертуру лазерного луча более чем на 25%.
Фиг. 10 показывает сводную таблицу множества вариаций вышеописанных элементов. Как показано, некоторые реализации могут иметь 0 сканеров Z-глубины, 1 сканер Z-глубины перед XY-сканером 300, 1 сканер Z-глубины после XY-сканера 300 и 2 сканера Z-глубины, один перед и один после XY-сканера 300.
Дополнительно, некоторые реализации могут иметь 0 NA-контроллеров, 1 NA-контроллер 1 перед XY-сканером 300, 1 NA-контроллер после XY-сканера 300 и 2 NA-контроллера, один перед и один после XY-сканера 300.
Здесь, Z-сканеры и NA-контроллеры, в общем, связаны с одной линзой или группой линз, которая позволяет модифицировать Z-глубину и числовую апертуру NA соответствующим образом. В некоторых случаях, эти модификаторы могут активироваться или управляться посредством одного электрического актуатора, который принудительно синхронно перемещает линзы модификатора, чтобы модифицировать NA или Z-глубину луча.
Как Z-сканеры, так и NA-контроллеры могут быть размещены в первом Z-сканере 250 и втором Z-сканере 450 по фиг. 9. В некоторых случаях, соответствующие оптические элементы являются различными, в других реализациях Z-сканер и NA-контроллер, которые размещаются в идентичном блоке 250 или 450 Z-сканера, могут совместно использовать одну или более линз, подвижных линз или электрических актуаторов.
Как показано на фиг. 10, 0 Z-сканеров и один или два NA-контроллера работают на фиксированной Z-глубине, но могут управлять NA во время XY-сканирования.
1 Z-сканер и 0 NA-контроллеров могут выполнять Z-сканирование.
1 Z-сканер и 1 или 2 NA-контроллера могут выполнять, в дополнение к Z-сканированию, управление NA.
2 Z-сканера могут выполнять Z-сканирование с двумя скоростями и также управлять NA в комбинации с 1 или 2 NA-контроллерами.
Безлинзовые оптические элементы также используются в некоторых реализациях, к примеру, регулируемые апертуры и зрачки.
Помимо этого, большинство из проиллюстрированных 16 комбинаций может быть дополнительно выполнено с возможностью предкомпенсировать выбранную аберрацию, к примеру, сферическую аберрацию.
Фиг. 10 иллюстрирует то, что различные системные характеристики, к примеру, Z-глубина луча, его числовая апертура NA и его аберрация, представленная посредством показателя аберрации, такого как коэффициент S Штреля, могут управляться или регулироваться независимо друг от друга. Такие варианты осуществления предлагают большую степень управления и точность оператору системы 1 доставки лазерного излучения.
В аналогичных вариантах осуществления, такое двойное приведение к требуемым параметрам луча может быть выполнено для других пар характеристик луча. Например, аналогичные таблицы с 4×4=16 парами могут быть составлены касательно контроллера аберрации и контроллера диаметра луча. Здесь 0, 1 или 2 контроллера аберрации могут спариваться во всех возможных комбинациях с 0, 1 или 2 контроллерами диаметра луча.
Список характеристик луча включает в себя: Z-глубину фокального пятна, числовую апертуру NA, радиус луча и любой показатель аберрации, к примеру, коэффициент S Штреля, радиус rf фокального пятна, RMS-ошибка ω волнового фронта и показатель a40 сферической аберрации.
3. XY-сканер 300
XY-сканер 300 может принимать предкомпенсированный луч из модуля 200 предкомпенсации, непосредственно или косвенно, после прохождения через некоторые промежуточные оптические элементы. Функция XY-сканера 300 может состоять в том, чтобы сканировать луч, принимаемый из модуля 200 предкомпенсации в направлении, по существу поперечном к оптической оси системы 1 доставки лазерного излучения. В различных вариантах осуществления, "поперечное" направление не обязательно является перпендикулярным оптической оси и может включать в себя любое направление, которое составляет реальный угол с оптической осью.
В некоторых вариантах осуществления, XY-сканер 300 выводит сканирующий лазерный луч, который, после распространения через систему 1 доставки лазерного излучения и достижения хирургической области, сканирует в поперечном направлении от нуля до максимума диапазона XY-сканирования 5-14 мм. В некоторых реализациях, максимум диапазона XY-сканирования находится между 8 и 12 мм.
Фиг. 11A иллюстрирует то, что XY-сканер 300 может включать в себя X-сканер и Y-сканер. В некоторых существующих конструкциях X- и Y-сканер включают в себя одно зеркало: одно X-сканирующее зеркало 310 и одно Y-сканирующее зеркало 320. В этих конструкциях, луч, отклоненный посредством X-сканирующего зеркала 310, ударяет Y-сканирующее зеркало 320 в различных точках в зависимости от ориентации X-сканирующего зеркала 310. В частности, когда X-сканирующее зеркало 310 находится в положении 310a, падающий луч света 331 отражается в качестве луча 332a, тогда как, когда X-сканирующее зеркало вращается в положение 310b, падающий луч света отражается в качестве луча 332b.
Эти два луча 332a и 332b ударяют Y-сканирующее зеркало 320 в различных положениях, и, следовательно, даже для неподвижного Y-сканирующего зеркала 320 в положении 320a они приводят к двум различным отраженным лучам 333aa и 333ba, соответственно. Еще хуже то, что когда Y-сканирующее зеркало 320 непосредственно вращается из положения 320a в 320b, эти два падающих луча света 332a и 332b приводят к двум дополнительным отраженным лучам 333ab и 333bb, причем все четыре луча 333aa, 333ab, 333ba и 333bb распространяются в различных направлениях.
Проблема может отличаться с точки зрения понятия точки поворота. Одной формулировкой точки поворота оптического элемента сканирования может быть точка, через которую проходят по существу все лучи после выхода из оптического сканирующего элемента. Это понятие является аналогом фокусной точки неперемещающихся преломляющих элементов при применении для перемещающихся оптических элементов, таких как сканеры.
С использованием этого термина вышеуказанная проблема может быть обратно прослежена на фиг. 11A до фиксации точки 315X поворота X-сканера на самом X-сканирующем зеркале 310. Выводимый сканированный луч должен отображаться для последующих оптических элементов как исходящий из одной точки 315X поворота на X-сканирующем зеркале 310 и тем самым распространяющийся в широком диапазоне углов. Эта дивергенция конструкций с двумя зеркалами может приводить к нескольким различным типам нежелательных аберраций.
Фиг. 11B иллюстрирует существующий XY-сканер 300' с тремя зеркалами, при этом X-сканер 310 включает в себя два зеркала 311 и 312, чтобы разрешать эту проблему. Для понятности, зеркала показаны сбоку. В этой конструкции, X-сканирующие зеркала 311 и 312 координированно выполняют функцию X-сканирования. Как показано на фиг. 11B, если первое X-сканирующее зеркало 311 изменяет ориентацию с 311a на 311b, второе X-сканирующее зеркало 312 может вращаться координированно с 312a на 312b. Эти координированные вращения при сканировании позволяют отклоненным лучам 332a и 332b в двух вращательных состояниях проходить через точку 315X поворота, которая поднимается от X-сканирующих зеркал.
Поскольку точка 315X поворота X-сканера поднята от самого X-сканирующего зеркала, его местоположение может регулироваться. В конструкции по фиг. 11B, X-сканирующие зеркала выполнены с возможностью размещать точку 315X поворота по существу на Y-сканирующем зеркале 320. В этих конструкциях, проблема X-сканера 310 на фиг. 11A по существу разрешается, и соответствующие аберрации существенно уменьшаются.
Тем не менее, даже эта конструкция имеет проблему, аналогичную проблеме по фиг. 11A, только в контексте Y-сканирующего зеркала 320. В конструкции по фиг. 11B, точка 315Y поворота Y-сканера по-прежнему является неподвижной для Y-сканирующего зеркала.
Входной зрачок оптической системы является изображением апертурной диафрагмы при просмотре системы спереди. Выходной зрачок является изображением апертурной диафрагмы в пространстве изображений. В оптической системе с несколькими группами линз местоположения входных и выходных зрачков зачастую тщательно регулируются. Во многих конструкциях выходной зрачок одной группы линз совпадает с входным зрачком следующей группы линз.
Для XY-сканера 310 точка поворота может рассматриваться в качестве выходного зрачка. В некоторых вариантах осуществления, этот выходной зрачок совпадает с входным зрачком следующей группы линз, к примеру, Z-сканера 450. Тем не менее, входной зрачок этой группы линз может располагаться внутри физических границ группы линз, где блок сканера не может быть размещен. В этом случае требуется блок сканера, для которого точка поворота располагается за пределами физических границ блока сканера в местоположении, которое может произвольно выбираться.
Фиг. 11C иллюстрирует конструкцию с четырьмя зеркалами, чтобы разрешать эту проблему. В XY-сканере 300" X-сканер 310 так же включает в себя два X-сканирующих зеркала 311 и 312. Тем не менее, Y-сканер также включает в себя два Y-сканирующих зеркала 321 и 322.
XY-сканер 300" исключает точку 315Y поворота Y-сканера из Y-сканирующего зеркала. Соответственно, XY-сканер 300" может управлять точкой 315Y поворота Y-сканера (или выходной) в предварительно определенное местоположение. Пример заключается в том, чтобы перемещать точку 315Y поворота Y-сканирования (выходную) на входной зрачок 340 последующей группы линз. В некоторых реализациях, точка 315X X-поворота также может перемещаться в идентичное местоположение.
Другие аспекты этой конструкции включают в себя то, что XY-сканер 300" может управлять по существу независимо (i) углом α между выводимым сканирующим лучом и оптической осью системы 1 доставки лазерного излучения и (ii) местоположением, в котором сканирующий луч ударяет входной зрачок последующего оптического элемента, отличающимся посредством расстояния d от оптической оси. Вследствие аппроксимированной независимости этих механизмов управления XY-сканер 300" может предоставлять сканирующий луч с минимизированными аберрациями, а также может управлять астигматизмом и комой в периферийных областях, включающих в себя периферийные области хирургической области.
Некоторые реализации XY-сканера 300''' включают в себя только одно X-сканирующее зеркало 310 и одно Y-сканирующее зеркало 320, каждое из которых имеет "быстроотклоняющий" тип. Отдельное быстроотклоняющее зеркало допускает угловое движение вокруг двух осей вращения. Пара этих быстроотклоняющих зеркал также может управлять углом ориентации луча и положением луча в плоскости, секущей к оптической оси.
В некоторых реализациях, XY-сканер 300''' выполнен с возможностью сканировать лазерный луч в диапазоне XY-сканирования, максимум которого превышает 5 миллиметров и меньше 15 миллиметров в фокальной плоскости лазерной системы.
В некоторых реализациях, точка X-поворота, сформированная посредством первого и второго XY-быстроотклоняющих зеркал, и точка Y-поворота, сформированная посредством первого и второго XY-быстроотклоняющих зеркал, совпадают.
4. Z-сканер 450
Как описано выше, офтальмологические хирургические системы выполнены с возможностью проводить хирургическую операцию переднего сегмента или хрусталика глаза при наличии конструкции, которая дает возможность для сканирования фокусной точки в интервале, существенно превышающем интервала сканирования при операциях на роговице. В некоторых реализациях, Z-сканирование выполняется по пути Z-сканирования в диапазоне Z-сканирования 5-10 мм или 0-15 мм. (Во всей данной заявке термин "сканирование в диапазоне x-y мм" означает путь сканирования, начальное значение которого составляет x мм или более, а конечное значение составляет y мм или менее, охватывая все пути сканирования, которые не идут по всему диапазону сканирования).
Здесь, следует напомнить, что назначения "X, Y, Z" используются в реализациях в широком смысле. Z типично обозначает оптическую ось, которая может находиться близко к геометрической оси. Но направление по оси Z в ткани-мишени, к примеру, глазу, может не быть полностью параллельным оптической оси системы 1 доставки лазерного излучения. Любая компромиссная ось между ними двумя также может упоминаться как направление по оси Z. Кроме того, направления по оси X, Y не обязательно являются перпендикулярными оси Z. Они могут означать любое направление, составляющее значимый угол с направлением по оси Z. Кроме того, в некоторых реализациях, система радиальных координат может быть более подходящей, чтобы описывать сканирование системы 1 доставки лазерного излучения. В этих реализациях, XY-сканирование означает любое сканирование, не параллельное оси Z, параметризованное посредством подходящих радиальных координат.
Фиг. 1 иллюстрирует то, что некоторые реализации системы 1 доставки лазерного излучения достигают этих перспективных больших диапазонов Z-сканирования посредством включения блока 400 первого расширителя луча и блока 500 подвижного расширителя луча в Z-сканер 450. В различных реализациях, блок 400 первого расширителя луча может быть подвижным блоком или неподвижным блоком. Расстояние между блоком 400 первого расширителя луча и блоком 500 подвижного расширителя луча может регулироваться, например, посредством актуатора положения.
Как уже проиллюстрировано на фиг. 2A-B, по мере того, как фокусная точка отдаляется от своего оптимального положения в ткани-мишени, аберрации увеличиваются. Эти аберрации типично называются "геометрическими аберрациями", поскольку они могут пониматься из отслеживания геометрических лучей и исходить из конечной протяженности линз. Эти геометрические аберрации могут быть ограничены посредством задания числовой апертуры Z-сканера 450 меньшей. Также, геометрические аберрации зависят как от глубины Z-фокуса, так и от числовой апертуры NA.
Помимо этого, со снижением числовой апертуры NA второй источник аберраций возникает вследствие волнового характера света. Эти аберрации приводят к так называемой "дифракционной аберрации". Этот второй тип аберрации увеличивает радиус фокального пятна со снижением числовой апертуры.
Фиг. 12A-B иллюстрируют геометрические и дифракционные аберрации в переднем сегменте глаза в качестве функции от размера апертуры Z-сканера 450, отличающейся посредством одного из вышеуказанных показателей аберрации: радиус rf фокального пятна. Поскольку геометрическая аберрация увеличивается с размером апертуры, в то время как дифракционная аберрация снижается, общая аберрация, заданная в качестве суммы этих двух аберраций, демонстрирует оптимальное минимальное значение при оптимальной аберрации и соответствующей оптимальной числовой аберрации NAopt.
Здесь обычная формулировка связывает числовую апертуру NA и размер апертуры: NA=n*Sin ArTan (размер апертуры/(2*фокусное расстояние)), где n является показателем преломления материала, на котором формируется изображение.
Эти кривые предназначены для конкретных глубин Z-фокуса, глубины Z-фокуса в 1 мм на фиг. 12A и глубины Z-фокуса в 8 мм на фиг 12B. Поскольку геометрическая аберрация отличается при различных глубинах Z-фокуса, минимум кривой общей аберрации, и тем самым оптимальный размер апертуры и оптимальная числовая апертура NAopt всей системы зависят от глубины Z-фокуса: NAopt=NAopt(z). В частности, оптимальный размер апертуры и NAopt снижается для увеличения глубины Z-фокуса, с 32 мм до 25 мм в этом конкретном случае, по мере того как глубина Z-фокуса увеличивается с 1 мм до 8 мм. Следовательно, системы доставки лазерного излучения, которые имеют намерение использоваться для обеих хирургий роговицы и хрусталика глаза, должны охватывать более широкий диапазон апертур и соответствующие диапазоны NA. Это требование приводит к значительным конструктивным сложностям.
Как пояснено дополнительно ниже, фиг. 12 A-B также иллюстрируют, что аберрация демонстрирует широкий плоский оптимум для типичных глубин Z-фокуса роговицы 1 мм, тогда как она демонстрирует более узкий и четкий минимум для глубин Z-фокуса, типичных для хирургии хрусталика глаза.
Кроме того, аберрация также может отличаться посредством других трех показателей S, ω или a40 аберрации, все из которых дают кривые, демонстрирующие оптимум. Любой из вышеуказанных четырех показателей аберрации может соответствовать любой из пяти опорных точек P(1),..., P(5), описанных выше, или может быть средним по части или всем опорным точкам, или может соответствовать другим опорным точкам.
В некоторых реализациях, в широком диапазоне глубин Z-фокуса размер апертуры и соответствующая NA могут регулироваться по существу до оптимальной числовой апертуры NAopt(z), минимизируя общую аберрацию, измеренную посредством показателя аберрации. Эта функциональность дает возможность серьезного уменьшения общей аберрации. Здесь, как указано выше, аберрации могут быть измерены посредством одного из четырех показателей rf, S, ω или a40 аберрации, в любой из вышеуказанных пяти опорных точек P1,..., P5. Оптимальная аберрация соответствует минимуму показателей rf, ω или a40 аберрации или максимуму коэффициента S Штреля.
В некоторых других реализациях, в которых оптимальная аберрация не может быть достигнута или конструктивные соображения диктуют то, что должна быть использована аберрация далекая от оптимального значения, блок 500 подвижного расширителя луча по-прежнему может снижать значения показателей rf, ω или a40 аберрации посредством, по меньшей мере, процентного отношения P(MovableExpander) или, соответственно, увеличивать значение коэффициента S Штреля посредством, по меньшей мере, процентного отношения P(MovableExpander), по сравнению с показателями аберрации по существу идентичной лазерной системы, в которой второй блок Z-сканера 450 не является подвижным, и тем самым числовая апертура не регулируется. В некоторых реализациях, P(MovableExpander) может составлять 20%, 30%, 40% или 50%. Здесь, как указано выше, показатели rf, S, ω или a40 аберрации могут быть измерены в любой из пяти опорных точек P1,..., P5.
В некоторых реализациях, лазерные системы, имеющие Z-сканер 450 с регулируемой числовой апертурой NA, могут увеличивать коэффициент S Штреля выше 0,8 относительно по существу идентичных лазерных систем, в которых Z-сканер не имеет регулируемой числовой апертуры, имеющих коэффициент S Штреля ниже 0,8.
Дополнительная конструктивная сложность заключается не только в том, чтобы минимизировать общую аберрацию на фиксированной глубине Z-фокуса посредством регулирования системы доставки лазерного излучения до оптимального размера апертуры и соответствующей числовой апертуры NAopt(z), но также и поддерживать систему, по меньшей мере, близко к Z-зависимой оптимальной числовой апертуре NAopt(z), когда глубина Z-фокуса сканируется. В типичной реализации, оптимальная числовая апертура снижается по мере того, как глубина фокуса увеличивается.
Чтобы разрешать это изменение оптимальной апертуры, когда глубина Z-фокуса сканируется в диапазоне Z-сканирования, реализации системы 1 доставки лазерного излучения имеют возможность изменения числовой апертуры NA(z) в качестве отдельного параметра Z-сканера 450, по существу независимо от варьирования глубины Z-фокуса непосредственно.
Реализации, в которых две величины управляются по существу независимо, в данный момент глубина Z-фокуса и числовая апертура NA, типично имеют пару параметров управления, чтобы достигать этого метода. Примеры включают в себя спаривание управляемого расстояния между блоком 400 первого расширителя луча и блоком 500 подвижного расширителя луча и положения подвижной линзы в любом из этих блоков, которые могут регулироваться посредством вторичного оптического контроллера. Другой пример включает в себя две подвижные линзы в любой комбинации в двух блоках Z-сканера 450. Следует напомнить, что блок 400 первого расширителя луча может быть реализован как неподвижный блок или подвижный блок.
В некоторых реализациях, числовая апертура NA может регулироваться к последовательности значений оптимальной числовой апертуры NAopt(z), давая в результате последовательность оптимальных значений общей аберрации в последовательности глубины Z-фокуса по мере того, как глубина Z-фокуса сканируется.
Как указано выше, оптимальная общая аберрация может захватываться посредством минимума любого из вышеуказанных показателей rf, ω или a40 аберрации или максимума коэффициента S Штреля. Диапазоны Z-сканирования могут составлять, например, 5-10 мм или 0-15 мм. Глубина Z-фокуса может сканироваться в радиусе r1=0 мм или r2=3 мм или в некотором другом радиусе r, или в переменном радиусе r(z), ограниченном, например, посредством r<3 мм.
Таблица 7 иллюстрирует пример, в котором второй столбец описывает сканирование глубины Z-фокуса в диапазоне Z-сканирования (-0,14 мм, 11,65 мм) в глазной ткани-мишени, и третий столбец показывает соответствующие значения NAopt(z). Реализации Z-сканера 450 допускают регулирование глубины Z-фокуса в этом диапазоне и регулирование числовой апертуры NA до оптимального значения NAopt(z) при этих глубинах фокуса.
В некоторых других вариантах осуществления, глубина Z-фокуса может сканироваться в диапазоне Z-сканирования от 0 до 10 мм. В ходе сканирования числовая апертура может варьироваться в диапазоне от 0,4 до 0,1, в некоторых других вариантах осуществления от 0,35 до 0,15.
Фиг. 12C иллюстрирует аналогичную последовательность кривых аберрации, соответствующих последовательности глубин Z-фокуса в 8 мм, 4 мм, 2 мм и 0 мм, демонстрирующих последовательность соответствующих оптимальных числовых апертур Nopt(z).
Фиг. 12D явно иллюстрирует оптимальные числовые апертуры Nopt(z) в качестве функции от соответствующих глубин Z-фокуса.
Как описано выше, отдельная регулируемость глубины Z-фокуса и числовой апертуры NA типично требует двух независимо регулируемых параметров управления. Некоторые реализации, тем не менее, могут не предлагать отдельную и независимую регулируемость Z и NA. Вместо этого для каждой глубины Z-фокуса эти реализации автоматически регулируют числовую апертуру либо до оптимального значения NAopt(z), либо, по меньшей мере, до окрестности NAopt(z) без отдельного этапа регулирования NA оператором. Например, NA может отслеживать NAopt(z) в пределах процента P(track), где P(track) может составлять 10%, 20% или 30%.
Эти реализации могут иметь только один, интегрированный регулируемый контроллер. В вышеописанном примере этот интегрированный контроллер может отображать пользователю системы только то, что он управляет глубиной Z-фокуса в целевой области. Тем не менее, контроллер может содержать включенный регулятор апертуры, который одновременно регулирует числовую апертуру NA, чтобы отслеживать NAopt(z) без отдельного этапа настройки, выполняемого пользователем системы 1 доставки лазерного излучения.
В некоторых реализациях, регулирование расстояния между первым расширителем 400 луча и подвижным расширителем 500 луча может выполнять эту функциональность адекватно. В других реализациях, одна подвижная линза может предлагать этот метод. В еще других реализациях, может использоваться комбинация двух регуляторов.
Эти реализации предлагают упрощенную функцию управления для оператора системы 1 доставки лазерного излучения. Поскольку достижение такой единой интегрированной функции управления является конструктивной сложностью, некоторые реализации выполняют эти интегрированные функции управления в комбинации с другими блоками, такими как модуль 200 предкомпенсации, XY-сканер 300 и объектив 700.
В некоторых реализациях, в которых оптимальные значения общей аберрации не могут или не достигаются для различных конструктивных соображений, числовая апертура NA может регулироваться к последовательности значений числовой апертуры в последовательности глубин Z-фокуса вдоль пути Z-сканирования в диапазоне Z-сканирования так, чтобы уменьшать общую аберрацию посредством, по меньшей мере, процентного отношения P(scan) относительно лазерных систем, Z-сканер 450 которых не имеет регулируемой числовой апертуры NA. В некоторых реализациях, P(scan) может составлять 20, 30, 40 или 50 процентов.
Как указано выше, общая аберрация может отличаться посредством любого из ранее введенных показателей rf, ω или a40 аберрации. Эквивалентно, уменьшение аберрации может отличаться посредством соответствующего увеличения коэффициента S Штреля. Путь Z-сканирования может быть путем, параллельным оси Z, при радиусе r от оптической оси или оси Z лазерной системы. В некоторых реализациях, путь Z-сканирования может находиться между радиусами r1=0 мм и r2=3 мм от оптической оси Z.
Общая аберрация может быть измерена несколькими различными способами. Общая аберрация может означать общую аберрацию, усредненную по пути Z-сканирования, либо максимальное или минимальное значение общей аберрации вдоль пути сканирования. Уменьшение общей аберрации может означать любую из этих возможностей.
В некоторых реализациях, числовая апертура NA может регулироваться от первого значения, когда операция на роговице выполняется, ко второму значению, когда операция на переднем сегменте выполняется. В некоторых реализациях, первое значение находится в пределах от 0,2 до 0,5, а второе значение находится в пределах от 0,1 до 0,3. В некоторых других реализациях, первое значение может находиться в пределах от 0,25 до 0,35, а второе значение может находиться в пределах от 0,15 до 0,25.
Настоящая реализация Z-сканера 450 отличается от существующих систем доставки лазерного излучения для роговицы несколькими другими способами, включающими в себя следующее.
1. В системах доставки лазерного излучения для роговицы типично требуется, чтобы числовая апертура не изменялась в ходе Z-сканирования глубины фокуса, чтобы обеспечивать простоту конструкции. Эта конструкция является удовлетворительной для хирургии роговицы, поскольку общая аберрация, накладываемая посредством типичного Z-сканирования на 1 мм, не является серьезным ограничивающим фактором точности систем доставки лазерного излучения для роговицы. Напротив, реализации системы 1 доставки лазерного излучения имеют переменную числовую апертуру NA, чтобы продолжать регулировать апертуру до оптимальной апертуры в обширном хирургическом Z-интервале, например, 5-10 мм. Это, конечно, достигается посредством метода регулирования числовой апертуры NA по существу независимо от глубины Z-фокуса.
2. Кроме того, типичные существующие системы для роговицы имеют свой Z-сканер в объективе 700 или в качестве части сложной реализации объектива 700, тогда как настоящий Z-сканер 450 располагается перед объективом 700. Здесь объектив 700 обозначает конечную группу линз системы 1 доставки лазерного излучения, которая располагается в функциональном механическом корпусе, отдельном от функционального механического корпуса XY-сканера и Z-сканера. Термин "функциональный механический корпус" означает не общий корпус системы доставки, конструкция которого может обусловливаться посредством соображений эргономичности или соображений внешнего вида, а корпус, который объединяет линзы, чтобы они выполняли свою фактическую оптическую функцию. Объектив 700 настоящих реализаций типично размещается в оптическом пути после того, как XYZ-сканирующий луч, выведенный посредством Z-сканера 450, отклоняется посредством зеркала 600.
3. Фиг. 12A-B иллюстрируют дополнительную сложность в конструкции хирургических оптических систем для хрусталика глаза. Видимо, общая аберрация демонстрирует широкую и плоскую оптимальную область для типичных глубин Z-фокуса роговицы в 1 мм, так что (i) системные параметры могут быть оптимизированы для других соображений, (ii) широкий диапазон Z-сканирования может быть использован, и (iii) менее точная настройка системных параметров необходима, без большого ухудшения размера фокального пятна. Напротив, для хирургических систем для хрусталика глаза размер фокального пятна ухудшается быстро, когда (i) системные параметры оптимизируются для других соображений, (ii) более широкий диапазон Z-сканирования реализуется, и (iii) системные параметры настраиваются менее точно.
В дополнительном аспекте вариантов осуществления Z-сканера 450, следует напомнить, что системы доставки лазерного излучения, которые включают в себя подсистему визуализации или визуальную наблюдательную оптическую подсистему, имеют лучи, ассоциированные с любой из этих подсистем, включенных в систему 1 доставки лазерного излучения 6 через зеркало 600. Зеркало 600 может быть, например, дихроическим зеркалом. В типичных хирургических системах объектив 700 означает группу линз, которая размещается после зеркала 600 в оптическом пути.
Реализация Z-сканера 450 перед зеркалом 600 и отдельно от объектива 700 также является важным конструктивным соображением, поскольку вес объектива 700 является критическим фактором, так как объектив 700 по существу напрямую контактирует с тканью-мишенью, к примеру, глазом пациента. Следовательно, минимизация веса или массы объектива 700 приводит к тому, что реализации системы 1 доставки лазерного излучения налагают пониженное давление на глаз. Так же, поскольку это давление деформирует сам глаз и тем самым снижает точность хирургической операции, конструкции, которые уменьшают давление на глаз, значительно повышают точность офтальмологической хирургии.
Таблицы 8-9 иллюстрируют диапазоны некоторых релевантных параметров для различных вариантов осуществления блока 400 первого расширителя луча и блока 500 подвижного расширителя луча. Блоки расширителя луча могут иметь 2-10 линз, в некоторых вариантах осуществления 3-5 линз, которые выполнены с возможностью осуществлять вышеуказанные функциональности.
Таблица 8 иллюстрирует вариант осуществления с пятью линзами блока 400 первого расширителя луча с использованием стандартных условных обозначений, описывающих группы толстых линз с точки зрения отдельных поверхностей. Блок 400 первого расширителя луча может включать в себя линзы 411, 412, 413, 414 и 415 с параметрами в следующих диапазонах (указываемых посредством скобок):
В некоторых вариантах осуществления, блок 400 первого расширителя луча включает в себя, последовательно с входной стороны, располагающейся напротив XY-сканера 300: первую группу линз с положительной преломляющей способностью, менисковую линзу, имеющую выпуклую поверхность, располагающуюся напротив входной стороны, и вторую линзу, имеющую вогнутую поверхность, располагающуюся напротив входной стороны.
Другие реализации связаны с реализациями таблицы 8 посредством коэффициента a масштабирования, имеющими пять масштабированных линз, кривизны второго столбца, умноженные на a, расстояния третьего столбца, умноженные на 1/a, и имеющие неизменные показатели преломления n. Коэффициент a масштабирования может допускать значения между 0,3 и 3.
Таблица 9 иллюстрирует вариант осуществления с четырьмя линзами блока 500 подвижного расширителя луча, включающего в себя линзы 511, 512, 513 и 514, с параметрами в следующих диапазонах:
Некоторые реализации блока 500 подвижного расширителя луча включают в себя, последовательно с входной стороны, располагающейся напротив блока 400 первого расширителя луча: менисковую линзу, имеющую вогнутую поверхность, располагающуюся напротив входной стороны, рассеивающую линзу с отрицательной преломляющей способностью и группу собирательных линз с положительной преломляющей способностью.
Другие реализации связаны с реализациями таблицы 9 посредством коэффициента a масштабирования, имеющими четыре масштабированных линзы, имеющими кривизны второго столбца, умноженные на a, расстояния третьего столбца, умноженные на 1/a, и имеющими неизменные показатели преломления n. Коэффициент a масштабирования может допускать значения между 0,3 и 3.
Фиг. 13A-B иллюстрируют варианты осуществления таблиц 8-9 в двух конфигурациях с различными расстояниями между блоком 400 первого расширителя луча и блоком 500 подвижного расширителя луча. В некоторых реализациях, блок 500 подвижного расширителя луча может перемещаться относительно блока 400 первого расширителя луча на расстояние в пределах d=5-50 мм.
Эти чертежи иллюстрируют конструктивные выполнения действующего Z-сканера 450.
Фиг. 13A иллюстрирует случай, когда блок 500 подвижного расширителя луча находится в положении, относительно далеком от блока 400 первого расширителя луча. В этом случае луч, выходящий из комбинированного сборочного узла, имеет (i) конвергентные лучи, (ii) относительно большой диаметр в выходном зрачке ExP, (iii) меньшую Z-глубину фокального пятна, когда объектив с фиксированным фокусным расстоянием размещается около выходного зрачка Z-сканера 450, и таким образом, (iv) фокальное пятно формируется посредством луча с более высокой числовой апертурой NA.
Фиг. 13B иллюстрирует случай, когда блок 500 подвижного расширителя луча находится ближе к первому расширителю 400 луча, чем в случае фиг. 13A. Здесь луч имеет (i) рассеивающие лучи, (ii) меньший диаметр в выходном зрачке ExP, (iii) большую Z-глубину фокального пятна, когда объектив с фиксированным фокусным расстоянием размещается в выходном зрачке Z-сканера 450, и таким образом, (iv) фокальное пятно формируется посредством луча с меньшей числовой апертурой NA.
В общих словах, на меньших глубинах Z-фокуса фокальное пятно формируется посредством луча с большой NA, тогда как при увеличении глубин Z-фокуса числовая апертура NA снижается. Относительное изменение в числовой апертуре NA может быть оптимизировано посредством оптимизации местоположения выходного зрачка ExP блоков 400 и 500 расширителя луча и местоположения входного зрачка фокусирующего объектива 700. Эти реализации являются альтернативными вариантами оптимизации числовой апертуры при различных глубинах фокуса даже без использования функциональностей модуля 200 предкомпенсации.
Как пояснено выше, числовая апертура NA может широко регулироваться с помощью или без помощи модуля 200 предкомпенсации. Во всей системе 1 доставки лазерного излучения числовая апертура NA может регулироваться посредством управления модулем 200 предкомпенсации, блоком 400 первого расширителя луча или блоком 500 подвижного расширителя луча либо посредством комбинированного управления этими блоками. Фактический выбор реализации на практике зависит от других требований уровня системы верхнего уровня, таких как диапазон сканирования, скорость сканирования и сложность. Реализации с другими областями числовых значений также могут быть выполнены с возможностью осуществлять часть или все вышеописанные функциональности.
Фиг. 14 иллюстрирует дополнительный аспект Z-сканера 450. Три различных характерных луча показаны как исходящие из выходной точки PP(XY) поворота XY-сканера 300. Следует отметить, что все три характерных луча фокусируются во входную точку PP(O) поворота объектива 700 посредством Z-сканера 450. Положение PP(O) может регулироваться, например, посредством перемещения подвижного расширителя 500 луча.
Как пояснено ниже, системы доставки лазерного излучения, которые формируют точку PP(O) поворота, расположенную вне зеркал XY-сканера 300, имеют полезные признаки, например, в вариантах осуществления, в которых точка PP(O) поворота попадает в объектив 700.
В других вариантах осуществления, XY-сканер 300 имеет выходную точку PP(XY) поворота дальше, чем расстояние до Z-сканера 450. В этих вариантах осуществления, Z-сканер 450 модифицирует только выходную точку PP(XY) поворота XY-сканера 300 во входную точку PP(O) поворота объектива 700.
В любом случае, эти реализации используют существование промежуточной фокальной плоскости 451, расположенной между блоком 400 первого расширителя луча и блоком 500 подвижного расширителя луча. Существование этой промежуточной фокальной плоскости 451 указывается посредством фокусных точек трех характерных лучей, поперечно совмещенных по существу с идентичной координатой Z. Наоборот, реализации, которые не обладают такой промежуточной фокальной плоскостью, не являются оптимальными для регулируемой точки PP(O) поворота.
Фиг. 15 иллюстрирует пример офтальмологической лазерной системы 1'', которая включает в себя блоки, аналогичные системам на фиг. 1 и фиг. 9, в том числе лазерный механизм 100, XY-сканер 300, расщепитель 600 луча, объектив 700 и интерфейс 800 пациента. Помимо этого, лазерная система 1'' может включать в себя Z-сканер, чтобы сканировать лазерный луч вдоль оси Z, причем Z-сканер может включать в себя непрерывный Z-сканер 250b и инкрементный Z-сканер 450b.
В аналогичных вариантах осуществления, два Z-сканера 250b и 450b могут интегрироваться в один корпус. Другими словами, порядок этих двух Z-сканеров может меняться, а именно, инкрементный Z-сканер 450b располагается перед XY-сканером 300, и непрерывный Z-сканер 250b располагается после XY-сканера 300. В еще других реализациях, объектив 700 может частично или полностью интегрироваться со смежным Z-сканером 450b или 250b. В некоторых реализациях, объектив не обязательно является неподвижным объективом.
Фиг. 16A иллюстрирует то, что инкрементный Z-сканер 450b может быть выполнен с возможностью Z-сканировать глубину фокуса офтальмологической лазерной системы 1'' внутри целевой области 461 инкрементно посредством Z-шагов 463(i) и непрерывный Z-сканер 250b может быть выполнен с возможностью Z-сканировать глубину фокуса офтальмологической лазерной системы 1'' непрерывно в диапазонах 464(i) непрерывного сканирования, соответствующих Z-шагам 463(i). Многочисленные различные варианты осуществления являются возможными, чтобы выполнять эти функциональности, как пояснено ниже.
В некоторых вариантах осуществления, инкрементный Z-сканер 450b может перемещать глубину Z-фокуса лазерной системы 1'' на Z-уровни 465(i). Непрерывный Z-сканер 250b может сканировать вокруг этих Z-уровней 465(i) в непрерывных диапазонах 464(i). Непрерывные диапазоны 464(i) могут быть центрированы вокруг Z-уровней 465(i), или они могут быть основаны на Z-уровнях 465(i), начиная сканирование на Z-уровне 465(i), или любое промежуточное решение может быть реализовано. В вариантах осуществления, в которых непрерывные диапазоны 464(i) центрируются вокруг Z-уровней 465(i), непрерывный сканер 250b может сканировать от значения Z(i)-∆(i) до Z(i)+∆(i), где Z(i) является глубиной фокуса на Z-уровне 465(i), и непрерывный диапазон 464(i) - это 2∆(i). В вариантах осуществления, в которых непрерывный сканер 250b основан на Z-уровне 465(i), непрерывное сканирование может осуществляться от Z(i) до Z(i)+∆(i) с диапазоном непрерывного сканирования в ∆(i).
В некоторых реализациях, непрерывные диапазоны 464(i) могут отличаться для различных Z-уровней 465(i) или Z-шагов 463(i), в других они могут быть идентичными. Непрерывные диапазоны 464(i) также могут зависеть от показателя преломления целевой области 461 вокруг соответствующих Z-уровней 465(i) или от радиального расстояния фокального пятна от оптической оси лазерной системы 1'' при глубине Z(i) фокуса.
В некоторых реализациях, когда Z-сканирование с Z-уровнем 465(i) достигает максимума соответствующего диапазона 464(i) непрерывного сканирования или приближается к нему, настройка инкрементного Z-сканера 450b может перемещаться посредством Z-шага 463(i+1) или на следующий Z-уровень 465(i+1). Соответственно, непрерывный Z-сканер 250b может сбрасываться от почти максимума диапазона 464(i) непрерывного сканирования до почти минимума диапазона сканирования 464(i+1).
Соответственно, если непрерывное сканирование центрируется вокруг Z-уровней, непрерывное сканирование может достигать глубины фокуса в Z(i)+∆(i), после чего выполняется этап инкрементного сканирования с настройкой инкрементного Z-сканера 450b как Z-уровня Z(i+1) и сбросом непрерывного сканера до -∆(i+1), т.е. этап сброса может обобщаться как перемещение глубины фокуса следующим образом: Z(i)+∆(i)->Z(i+1)-∆(i+1).
В тех вариантах осуществления, в которых непрерывное сканирование основано на Z-уровнях 465(i), этот этап сброса захватывается посредством перемещения глубины фокуса следующим образом: Z(i)+∆(i)->Z(i+1).
В завершение, в ступенчатых вариантах осуществления, когда непрерывный Z-сканер 250b достигает почти максимума i-того диапазона ∆(i) непрерывного сканирования, в то время как инкрементный Z-сканер 450b уже выполнил i Z-шагов, инкрементный сканер 450b может увеличивать глубину фокуса посредством Z-шага 463(i+1), после чего выполняется сброс непрерывного Z-сканера 250b почти к минимуму диапазона ∆(i+1) непрерывного сканирования. Во всех вышеуказанных реализациях диапазоны ∆(i) сканирования могут зависеть от глубины Z(i) фокуса, от Z-уровней 465(i) и от Z-шагов 463(i). В других вариантах осуществления, ∆(i) может являться независимым от i: ∆(i)=∆.
В некоторых реализациях, некоторые или все диапазоны 464(i) непрерывного сканирования могут превышать соответствующие Z-шаги 463(i) или разности между Z-уровнями: 465(i+1)-465(i). В таких реализациях все Z-глубины в целевой области 461 могут быть достигнуты оператором лазерной системы 1'', поскольку диапазон 464(i+1) непрерывного сканирования после Z-шага 463(i) перекрывается с диапазоном 464(i) непрерывного сканирования перед Z-шагом 463(i). В некоторых реализациях, диапазоны непрерывного Z-сканирования просто соприкасаются вместо перекрытия.
В вышеприведенных примерах, в которых диапазоны непрерывного сканирования [-∆(i),..., ∆(i)] центрируются вокруг Z-уровней Z(i), условие для перекрытия преобразуется в следующее:
|Z(i)+∆(i)|>|Z(i+1)-∆(i+1)|.
В вышеприведенных примерах, в которых диапазоны ∆(i) непрерывного сканирования основаны на Z-уровнях Z(i), это условие преобразуется в следующее:
|Z(i)+∆(i)|>|Z(i+1)|.
В завершение, в примерах Z-шагов, это условие преобразуется в минимум диапазона 464(i+1) непрерывного сканирования после Z-шага 463(i), перекрывающегося с максимумом диапазона 464(i) непрерывного сканирования, достигнутого посредством непрерывного сканера 250b перед Z-шагом 463(i).
Лазерные системы с такими диапазонами перекрытия могут предоставлять квазинепрерывное Z-сканирование целевой области 461. Это может достигаться посредством, например, использования программных решений, чтобы подстраивать или калибровать лазерную систему 1'', чтобы минимизировать или даже исключать перекрытия. В таких примерах хирург может квазинепрерывно изменять глубину Z(i) Z-фокуса с одновременным изменением инкрементного Z-сканера 450b и непрерывного Z-сканера 250b.
В зависимости от типа операций, общий диапазон Z-сканирования может иметь длину в одном из диапазонов в 0-5 мм, 5-10 мм, 10-30 мм и 0-15 мм. Каждый из этих диапазонов может служить для качественно различных хирургических целей и вызывать собственные уникальные технические сложности. Например, диапазон Z-сканирования в 0-5 мм, к примеру, 1 мм может быть главным образом полезным для операций на роговице, поскольку толщина роговицы может быть около 1 мм, и тем самым сканирование в диапазоне 464 непрерывного сканирования 1 мм в (-0,5 мм,..., 0,5 мм) около Z-уровня 465 в 0,5 мм может охватывать целевую хирургическую область роговицы. Диапазон Z-сканирования в диапазоне 5-10 мм, к примеру, 7 мм может быть полезным для операций на катаракте, поскольку хрусталик глаза в человеческом глазе типично идет в направлении по оси Z от 3 мм до 10 мм. Таким образом, сканирование в диапазоне непрерывного сканирования в 7 мм (-3,5 мм,..., 3,5 мм) около Z-уровня 6,5 мм позволяет охватывать всю целевую хирургическую область хрусталика глаза.
Диапазон Z-сканирования в диапазоне 0-15 мм, к примеру, 11 мм может быть полезным для интегрированных операций, когда операции на роговице, а также операции на катаракте выполняются в одной общей хирургической программе. В таких реализациях, инкрементный Z-сканер 450b может иметь сначала перевод глубины фокуса на Z-уровень 465(c) роговицы, позволяя хирургу выполнять операцию на роговице глаза в диапазоне 464(c) непрерывного сканирования около Z-уровня 465(c) роговицы, и на один или более Z-уровней 465(i) хрусталика глаза, позволяя хирургу выполнять дополнительную операцию на хрусталике глаза в диапазонах 464(i) непрерывного сканирования вокруг Z-уровней 465(i) хрусталика глаза.
Фиг. 16B иллюстрирует конкретный вариант осуществления, касающийся офтальмологической хирургии. В таком ориентированном на катаракту варианте осуществления, хирургическая область 461 может быть затвердевшей частью ядра клетки в хрусталике 470 глаза. Перекрывающиеся (или соприкасающиеся) диапазоны 464(i) непрерывного Z-сканирования могут располагаться внутри этой хирургической области 461. Как схематично показано в качественном отношении на фиг. 16B, чтобы предоставлять контекст, хрусталик 470 глаза находится внутри глаза, который также включает в себя роговицу 472, переднюю камеру 474 глаза и радужную оболочку 476 глаз, которая зачастую расширяется, чтобы повышать точность и доступность. Лазерные системы 1, 1' или 1'' типично контактируют с глазом через интерфейс 800 пациента.
Реализации лазерной системы 1'' позволяют управлять не только глубиной Z-фокуса, но также и позволяют поддерживать одну или более аберраций лазерного луча лучше порогового значения в целевой области 461. Здесь термин "лучше" отражает тот факт, что аберрации могут отличаться посредством различных показателей, и для некоторых из этих показателей аберрация меньше, если показатель поддерживается ниже порогового значения, в то время как для некоторых других показателей аберрация меньше, если показатель поддерживается выше порогового значения.
Как пояснено выше, аберрации могут захватываться, например, с точки зрения коэффициента S Штреля, радиуса rf фокального пятна, RMS-ошибки ω волнового фронта и коэффициента a40 расширения сферической аберрации. Хотя последующее описание ориентировано на коэффициент S Штреля и радиус rf фокального пятна, аналогичные описания с точки зрения a40 и ω являются в равной степени характерными.
Следует напомнить, что оптимальное значение S равняется 1. В архитектуре непрерывного Z-сканера 250b и инкрементного Z-сканера 450b, реализации лазерной системы 1'' позволяют поддерживать коэффициент S Штреля выше порогового значения S(threshold) в целевой области 461, при этом S(threshold) может составлять 0,6, 0,7, 0,8 и 0,9.
Поскольку коэффициент Штреля S может зависеть от длины волны, пороговое значение коэффициента Штреля может указываться для лазерного луча с длиной волны в пределах 0,4-1,1 микрона.
Также следует напомнить, что аберрации могут значительно варьироваться в целевой хирургической области 461. Управление аберрациями в таком расширенном объеме облучаемых тканей является довольно сложным. Чтобы управлять аберрациями в расширенной целевой хирургической области 461, реализации могут поддерживать коэффициент S Штреля выше S(threshold) в одной или более вышеуказанных заданных пяти опорных точек, определенных посредством цилиндрических координат (z, r) в целевой области как P1=(0,0), P2=(2,6), P3=(5,0), P4=(8,0), P5=(8,3), в миллиметрах, под любым азимутальным углом ϕ, относительно передней стороны и центра целевой области в (0, 0).
Аналогично, варианты осуществления лазерной системы 1'' позволяют управлять аберрацией посредством поддержания радиуса rf фокального пятна меньшим порогового значения rf(threshold) в целевой области, при этом rf(threshold) может составлять 2, 3, 4, 5 и 6 микрометров.
Как указано выше, эти значения радиуса rf фокального пятнамогут быть меньше rf(threshold) в одной или более пяти опорных точек в целевой области P1=(0,0), P2=(2,6), P3=(5,0), P4=(8,0), P5=(8,3), в миллиметрах, под любым азимутальным углом ϕ, относительно передней стороны и центра целевой области в (0, 0).
Хотя только два конкретных показателя аберрации пояснены подробно, лазерная система 1'' может управлять множеством аберраций, включающих в себя сферические аберрации, кому, астигматизм и хроматическую аберрацию.
Реализации лазерной системы 1'' также позволяют компенсировать, по меньшей мере, частично, аберрации, которые вызваны посредством Z-сканирования посредством Z-сканеров 250b и 450b глубины фокуса лазерной системы 1'' в целевой области 461.
Фиг. 17A-B иллюстрируют, что в некоторых реализациях инкрементного Z-сканера 450b эта и другие цели достигаются посредством использования регулируемых каскадов или каскадов удлинителя фокуса, 481(i), которые могут быть размещены в и вне пути лазерного луча. Эти регулируемые каскады могут быть выполнены с возможностью Z-сканировать глубину фокуса при предварительно определенных Z-приращениях.
Регулируемые каскады 481(i) могут содержать соответствующие линзы 491(i), смонтированные на механических ползунках, механических актуаторах, поворотных рычагах и электромеханических устройствах, которые допускают перемещение линз 491(i) в и за пределы оптического пути лазерного луча. Например, следы перемещения в некоторых из этих реализаций могут быть поперечными к оптической оси.
Фиг. 17A-B иллюстрируют трехкаскадную реализацию. В других реализациях число каскадов может составлять 1, 2, 4 или более. Комбинация непрерывного Z-сканера 250b и инкрементного Z-сканера 450b с использованием нескольких регулируемых каскадов с линзами 491(i) удлинителя фокуса дает возможность квазинепрерывного изменения Z-сканирования фокального пятна, аналогично вышеприведенному описанию. Чтобы минимизировать число регулируемых каскадов 481(i), смещения 492(i) фокуса линз 491(i) могут быть пропорциональными целочисленным степеням 2. В этих вариантах осуществления, смещения 492(i) фокуса линз 491(i) удлинителя фокуса могут допускать значения 20, 21,..., 2n, умноженные на базовое смещение фокуса. Вставка n линз 491(i) удлинителя фокуса во всех возможных комбинациях создает 2n конфигураций с линзами на входе и линзами на выходе. Эти конфигурации позволяют оператору лазерной системы 1'' сканировать целевую область в 2n по существу равноотстоящих Z-уровнях 465(i).
Принцип этих реализаций демонстрируется на трехступенчатом инкрементном Z-сканере 450b. Смещения 492(1), 492(2) и 492(3) фокусов трех линз 491(1), 491(2), 491(3) удлинителя фокуса приблизительно равны базовому смещению фокуса, например, 1 мм, умноженной на степени 2 как 20=1, 21=2 и 22=4, как показано в таблице 10:
23=8 входных/выходных комбинаций этих трех каскадов 481(1), 481(2), 481(3) предоставляют 8 равноотстоящих Z-уровней 465 (1),..., 465 (8), отделенных посредством четного Z-шага 463 в 1 мм, в случае реализации в следующей последовательности конфигураций:
Примечательно, что входные/выходные комбинации таблицы 11 имеют соответствие "один-к-одному" с двоичным представлением соответствующих смещений фокуса, где "вход" соответствует 1, а "выход" - нулю. Например, конфигурация 5, проиллюстрированная на фиг. 17B, является конфигурацией (вход, выход, вход) регулируемых каскадов 1, 2 и 3, которая является точно двоичным представлением числа 5: 101.
Некоторые варианты осуществления имеют диапазоны 464(i) непрерывного Z-сканирования, превышающие 1 мм посредством небольшой величины, создавая перекрывающиеся диапазоны сканирования. Эти системы предлагают возможность калибровать лазерную систему 1'', чтобы не допускать промежутков между смежными диапазонами Z-сканирования, которые могут возникать по множеству причин, включающих в себя неточности диапазонов и граничные положения в физической системе. Такие реализации могут предоставлять возможность оператору лазерной системы 1'' квазинепрерывно Z-сканировать по существу общий диапазон Z-сканирования на 8 мм вообще без пропуска глубин фокуса. Эта реализация, следовательно, также может позволять хирургу выполнять операции на катаракте или даже на интегрированном хрусталике глаза и операции на роговице с высокой точностью.
Когда смещения фокуса вследствие вставки отдельных линз 491(i) удлинителя фокуса являются небольшими по сравнению с фокусным расстоянием лазерной системы 1'', общее смещение фокуса является суммой смещений фокуса от отдельных компонентов удлинителя фокуса. Помимо этого, согласно теореме Алдиса (Handbook of Optical Systems, Volume 3: Aberration Theory ad Correction of Optical Systems, Ed: Herbert Gross, Wiley-VCH Verlag GmbH and Co. KGaA, Weinheim, 2007 год), аберрация оптической системы может выражаться как сумма аберраций, соответствующих поверхностям различных оптических элементов.
В свете теоремы Алдиса, аберрация всего Z-сканера с регулируемыми каскадами 450b может компенсироваться в качестве суммы компенсаций отдельных регулируемых каскадов 481(i) и их линз 491(i) удлинителя фокуса. В реализациях, в которых линзы 491(i) компенсируют, по меньшей мере, частично, собственные аберрации, общая аберрация лазерной системы 1'' может оставаться по существу компенсированной во время всего Z-сканирования или, по меньшей мере, большей его части.
Регулируемые каскады 481(i) могут компенсировать, по меньшей мере, частично, аберрации, вызываемые посредством Z-сканирования самих регулируемых каскадов 481(i) посредством использования одной или более надлежащим образом выбранных мультиплетных линз в регулируемых каскадах.
Примеры мультиплетных линз включают в себя функциональные мультиплеты: оптические элементы, которые содержат несколько линз, имеющих, например, различные показатели преломления, толщину или радиусы. В простейших реализациях эти линзы непосредственно соединяются между собой, в других они не находятся в прямом контакте. В общем, линзы этих функциональных мультиплетов перемещаются совместно, иногда в выделенном корпусе линз.
Мультиплетные линзы позволяют достигать полной оптической фокусировки луча, идентичной полной оптической фокусировке луча синглетных линз. Вдобавок ко всему, поскольку они имеют дополнительные настраиваемые параметры (к примеру, радиусы, кривизны и показатели преломления каждой линзы), больше типов аберраций может компенсироваться посредством настройки этих дополнительных параметров, включающих в себя астигматизм, кому, сферические аберрации высшего порядка или хроматические ошибки.
Другие варианты осуществления самокомпенсирующих линз компенсируют аберрации при наличии соответствующих форм-факторов или посредством изгиба линзы. Изгиб линзы является эффективным инструментом для того, чтобы управлять сферической аберрацией. Величина изгиба отличается посредством параметра изгиба X=(c1+c2)/(c1-c2), где c1 и c2 являются кривизнами поверхностей линзы. Сферическая аберрация зависит квадратично от параметра X изгиба, кома зависит линейно от X (Handbook of Optical Systems, Volume 3: Aberration Theory ad Correction of Optical Systems, Ed: Herbert Gross, Wiley-VCH Verlag GmbH and Co. KGaA, Weinheim, 2007 год). Надлежащим образом выбираемый изгиб линзы может компенсировать сферическую аберрацию или кому, введенную как результат фокусировки лазерного луча при различных глубинах, и другие аберрации, присутствующие, когда линза не вставляется в требуемое положение.
Фиг. 18 иллюстрирует вариант осуществления инкрементного Z-сканера 450b. Эта трехкаскадная реализация включает в себя синглетную линзу 491a(1), первую мультиплетную линзу 491a(2) и вторую мультиплетную линзу 491a(3). Эти линзы 491a могут быть в отдельном Z-сканере 450b или могут интегрироваться с объективом 700. Дополнительная группа линз может быть расположена между объективом 700 и инкрементным Z-сканером 450b. Объектив 700 может быть в отдельном корпусе от инкрементного Z-сканера 450b, неподвижным или подвижным относительно него.
Диапазоны параметров конкретного варианта осуществления инкрементного Z-сканера 450b описываются в таблицах 12.1-12.3 с точки зрения поверхностей, пересекаемых посредством лазерного луча:
Различные реализации могут иметь Z-сканеры, расположенные по-разному в лазерной системе 1''. В некоторых случаях, непрерывный Z-сканер 250b может быть размещен между лазерным источником 100 и XY-сканером 300, и инкрементный Z-сканер 450b может быть размещен после XY-сканера 300 в пути лазерного луча.
В других вариантах осуществления, непрерывный Z-сканер 250b может быть размещен после XY-сканера 300 в пути лазерного луча. В еще других реализациях, непрерывный Z-сканер 250b может включать в себя первый блок, размещенный между лазерным источником 100 и XY-сканером 300, и второй блок, размещенный после XY-сканера 300 в пути лазерного луча.
Варианты осуществления лазерной системы 1'' могут быть выполнены с возможностью варьировать глубину Z-фокуса и числовую апертуру NA лазерного луча по существу независимо друг от друга.
Некоторые варианты осуществления имеют инкрементный Z-сканер 450b, размещенный перед объективом 700 в пути лазерного луча, в корпусе, отдельном от него.
Некоторые реализации лазерной системы 1'' могут управляться посредством способа 493 на следующих этапах:
493(a). Формирование лазерного луча посредством лазерного источника 100,
493(b). Z-сканирование глубины фокуса лазерного луча посредством инкрементного Z-сканера 450b, и
493(c). Z-сканирование глубины фокуса лазерного луча посредством непрерывного Z-сканера 250b.
Этап 493(b) Z-сканирования посредством инкрементного Z-сканера 450b может включать в себя Z-сканирование глубины фокуса с инкрементными Z-шагами 463(i). Этап 493(c) Z-сканирования посредством непрерывного Z-сканера 250b может включать в себя Z-сканирование глубины фокуса в диапазонах 464(i) непрерывного сканирования, соответствующих Z-шагам 463(i).
В некоторых реализациях, один или более диапазонов 464(i) непрерывного сканирования могут превышать Z-шаги 463(i). В этих реализациях, диапазоны 464(i) и 464(i+1) непрерывного сканирования, в которых глубина фокуса может быть Z-сканирована с помощью непрерывного Z-сканера 250b до и после Z-шага 463(i) или центрирована вокруг соседних Z-уровней 465(i) и 465(i+1), перекрываются, позволяя оператору офтальмологической лазерной системы 1'' Z-сканировать глубину фокуса в диапазоне квазинепрерывного Z-сканирования.
Некоторые варианты осуществления способа 493 могут включать в себя: перевод инкрементного Z-сканера 450b на Z-уровень 465(c) роговицы, выполнение хирургической операции на роговице посредством Z-сканирования глубины фокуса с помощью непрерывного Z-сканера 250b около Z-уровня 465(c) роговицы, перевод инкрементного Z-сканера 450b на один или более уровней 465(i) хрусталика глаза и выполнение хирургической операции на хрусталике глаза посредством Z-сканирования глубины фокуса с помощью непрерывного Z-сканера 250b вокруг Z-уровней 465(i) хрусталика глаза.
Способ 493 может поддерживать аберрацию лучше порогового значения в целевой области 461. Здесь аберрация может быть сферической аберрацией, комой, астигматизмом и хроматической аберрацией либо любой комбинацией означенного.
Этап 493(b) Z-сканирования посредством инкрементного Z-сканера может включать в себя размещение регулируемых каскадов 481(i) инкрементного Z-сканера 450b в и вне пути лазерного луча.
В этих реализациях, этап 493(b) дополнительно может включать в себя размещение регулируемых каскадов 481(i) в последовательности конфигураций, которые Z-сканируют глубину фокуса при предварительно определенных Z-приращениях. В некоторых случаях, глубина фокуса перемещается пропорционально длине базового Z-приращения, умноженной на различные степени 2, посредством перемещения различных регулируемых каскадов 481(i) в пути лазерного луча.
Z-сканирование глубины фокуса также может включать в себя: (a) Z-сканирование глубины фокуса с помощью непрерывного Z-сканера до глубины фокуса почти в максимум первого диапазона непрерывного сканирования, (b) увеличение глубины фокуса с инкрементным Z-шагом посредством инкрементного Z-сканера, (c) сброс непрерывного Z-сканера почти до минимума второго диапазона непрерывного сканирования и (d) Z-сканирование глубина фокуса во втором диапазоне непрерывного сканирования.
Способ 493 может давать возможность Z-сканирования глубины фокуса по существу независимо от регулирования числовой апертуры лазерного луча.
5. Объектив 700
В некоторых реализациях, лазерный луч, выведенный посредством Z-сканера 450, отклоняется посредством расщепителя луча/дихроического зеркала 600 на объектив 700. Через это зеркало 600 различные вспомогательные источники света также могут включаться в систему 1 доставки лазерного излучения. Вспомогательные источники света могут включать в себя источник света, ассоциированный с системой визуализации на основе оптической когерентной томографии (OCT), системой освещения и визуальным наблюдательным блоком.
Объектив 700 может предоставлять совместно используемый оптический путь для XYZ-сканированного лазерного луча, распространяемого из лазерного механизма 100 через XY-сканер 300 и Z-сканер 450 и вспомогательный источник света в хирургическую целевую область. В различных реализациях, объектив 700 может включать в себя группы линз объектива. В нескольких реализациях, линзы групп линз объектива не перемещаются друг относительно друга. Также, хотя объектив 700 является неотъемлемой частью функциональности Z-сканирования, он не способствует регулируемому или динамическому Z-сканированию. В этих реализациях, положение линзы не регулируется в объективе 700, чтобы перемещать глубину Z-фокуса фокального пятна.
Реализации объектива 700 могут управлять, по меньшей мере, одной из сферической аберрации, комы и аберраций высшего порядка луча импульсного лазерного скальпеля.
Поскольку объектив 700 направляет источники света различной длины волны, реализации объектива 700 используют группы ахроматизированных линз. Длина волны вспомогательного источника света может быть, например, в пределах 0,4-0,9 микрона, и длина волны хирургического источника света может быть в диапазоне 1,0-1,1 микрона. Реализации объектива 700 поддерживают хроматические аберрации ниже предварительно определенного значения по всему диапазону длин волн используемого источника света, к примеру, 0,4-1,1 микрона в вышеприведенном примере.
Вес или масса объектива 700 является важным показателем. В некоторых реализациях, объектив находится в механическом контакте с глазом пациента. Также, он прилагает давление к глазу. Это давление может деформировать глаз вследствие своей ослабляющей конфигурации, затрудняя выбор целей и точное направление луча лазерного скальпеля.
Кроме того, если пациент перемещается во время хирургической операции, может быть предпочтительным, если объектив может перемещаться с наименьшим сопротивлением в ответ на перемещение пациента. Хотя вес объектива может статически балансироваться с помощью системы пружин или противовеса, эти показатели могут не уменьшать динамические силы или силы инерции. Фактически, эти силы могут быть увеличены посредством таких показателей. Все эти соображения указывают на полезность уменьшения веса или массы объектива 700.
Существуют многочисленные способы идентифицировать критические силы и соответствующие массы объектива относительно офтальмологических хирургических операций. Анализ различных ударных воздействий на глаз опубликован, например, в работе "Determination of Significant Parameters for Eye Injury Risk from Projectiles"; Duma SM, Ng TP, Kennedy EA, Stitzel JD, Herring IP, Kuhn F. J Trauma., октябрь 2005 года; 59(4):960-4. Эта работа рассматривает объекты, ударно воздействующие на глаз, и предоставляет критические значения энергии воздействующих объектов, соответствующие (i) различным типам повреждения глаза, включающих в себя небольшие травмы, такие как царапины на роговице, умеренные, такие как смещения хрусталика глаза, и серьезные травмы, такие как повреждение сетчатки глаза. Документ также назначает вероятность травмы от (ii) низкой, представляющей вероятность в несколько процентов, до средней, представляющей приблизительно 50%-ную вероятность, и высокой, означающей практически достоверность травмы. Документ дополнительно классифицирует (iii) сценарии ударного воздействия согласно форме воздействующего объекта, при этом классификация выполняется согласно общей ударной энергии и ударной энергии, нормализованной посредством области ударного воздействия.
Эти результаты могут применяться к конкретному случаю хирургии глаза посредством сбора сведений о возможно наибольшей травме от ударного воздействия, вызываемой посредством полной поломки механической опорной системы объектива 700. Такой поломка может приводить к свободному падению всего объектива 700 по типичному вертикальному пути 20-25 мм, перенося всю энергию объектива в сам глаз. Критические массы могут быть вычислены из опубликованных критических значений энергии, моделируя свободное падение объектива согласно известным физическим принципам.
Вертикальный путь этой длины может выясняться из следующих конструктивных принципов. Объектив 700 может монтироваться на вертикальной плавно перемещающемся каскаде, чтобы предоставлять безопасную и надежную стыковку системы 1 доставки лазерного излучения посредством рамы с глазом. Эти схемы смягчают требования по точности и силам на раму, поскольку вертикальная рама размещает объектив 700 так, что он располагается в диапазоне вертикального перемещения. Дополнительно, как только глаз стыкуется, эти конструкции позволяют глазу перемещаться вертикально относительно лазерного источника 100 без нарушения присоединения глаза к системе 1 доставки лазерного излучения. Эти перемещения могут возникать вследствие перемещения пациента или перемещения функциональной кровати. Диапазон вертикального перемещения в 20-25 мм объектива 700 уменьшается эффективно и безопасно против сил рамы и движения пациента в этом диапазоне.
В завершение, (iv) конструктивное соображение также влияет на критические массы в том смысле, что ("оптическая") масса оптических элементов объектива 700, к примеру, только стеклянных линз в группах линз объектива задает нижний предел в массе всего объектива, поскольку существуют многочисленные способы уменьшать массу корпуса и системы управления объективом, тогда как гораздо труднее уменьшать массу линз. В настоящих системах общая масса объектива может в два-три раза превышать "оптическую" массу только линз.
Некоторые из этих критериев приводят к более четким формулировкам критических масс, другие - только к плавной перекрестной зависимости, не способствуя четкой формулировке.
Из всех возможных комбинаций вышеуказанных классификаций (i)-(iv), четыре относительно четких и значимых формулировки критических масс MC могут быть идентифицированы следующим образом:
(1) MC1~400 грамм: объективы с массами M (2) MC2~750 грамм: массы в режиме MC1 (3) MC3~1300-1400 грамм: массы в режиме в MC2 (4) MC4~3300 грамм: массы в диапазоне MC3 Все эти вероятности, конечно, должны быть умножены на небольшую вероятность полной фактической поломки механической опорной системы объектива. Тем не менее, в офтальмологических вариантах применения чрезвычайные меры должны быть приняты в защиту от всех возможных сценариев получения травм, что, тем не менее, не приводит к тому, что вышеуказанные критические массы являются релевантными. Следовательно, вышеуказанные соображения идентифицируют четыре критических массы согласно четким критериям касательно общих и оптических масс объектива 700. Соответственно, варианты осуществления объектива 700, в которых процесс конструирования нацелен на уменьшение массы объектива ниже любой из вышеуказанных критических масс MC4,..., MC1, предлагают качественно лучшие вероятности безопасных хирургических операций. Существующие объективы для фемтосекундных офтальмологических лазеров имеют массу выше 5000 грамм, значительно выше даже наибольших из этих четырех критических масс. Исключение приведено в заявке на патент (США) 20030053219 автора Manzi, которая описывает систему линз, в которой только оптическая масса линз составляет приблизительно 1000 грамм, возможно приводя к общей массе 2000-3000 грамм. Хотя конструкция по Manzi легче других существующих объективов, она по-прежнему является довольно массивной. Это главным образом обусловлено тем, что Z-сканер является неразъемной частью объектива, поскольку элементы линз внутри объектива используются для управления Z-фокусом. Дополнительная масса требуется по Manzi для обработанного на станке с высокой точностью корпуса, для точной опоры качения для линз и для сервомотора, и все это так же увеличивает общую массу до значений выше 5000 грамм. Напротив, масса различных вариантов осуществления объектива 700 может попадать в любой из вышеуказанных четырех диапазонов масс: 0-400 грамм, 400-750 грамм, 750-1350 грамм и 1350-3300 грамм. Масса может быть или оптической или общей массой. Например, линзы в реализации объектива 700 могут иметь массу менее 130 грамм. Осуществимо монтировать эти линзы в прецизионном металлическом корпусе для общей массы сборочного узла в 400 грамм. Варианты осуществления объектива 700 достигают такого значительного снижения массы до значений ниже 400 грамм, 750 грамм, 1350 грамм и 3300 грамм посредством передачи функциональности Z-сканирования в отдельный Z-сканер 450 и его размещения в отдельном функциональном или механическом корпусе. Здесь термин "функциональный или механический корпус" означает тот факт, что, в целом, нефункциональные конструктивные соображения могут приводить к помещению отдельного Z-сканера 450 в общий контейнер, идентичный контейнеру объектива 700, но такой общий контейнер не выполняет оптическую функцию или не служит для механической цели. В некоторых вариантах осуществления, масса объектива 700 может быть уменьшена посредством процентного отношения P(mass) по сравнению с аналогичными объективами, которые выполняют, по меньшей мере, часть динамической функциональности Z-сканирования посредством регулирования оптической характеристики объектива 700. Такой характеристикой может быть интегрирование Z-сканера 450 полностью в объектив 700 или интегрирование блока 500 подвижного расширителя луча в объектив 700, или интегрирование одной или более подвижных сканирующих линз в объектив 700. P(mass) может составлять 10%, 50% или 100%. Другой связанный аспект объектива 700 и соответствующая конструкция хирургической лазерной системы 1 описаны относительно фиг. 14, на котором показано, что варианты осуществления Z-сканера 450 могут фокусировать XYZ-сканированный лазерный луч на входную точку PP(O) поворота объектива. Варианты осуществления, которые имеют входную точку PP(O) поворота в объективе 700, имеют сильно уменьшенный радиус rb луча в значительной части оптического пути, когда луч сходится к этой внутренней точке PP(O) поворота. В свою очередь, луч с уменьшенным радиусом rb луча может управляться посредством меньших линз, приводя к значительному сокращению общей массы объектива 700. Реализация объектива 700 согласно вышеуказанным конструктивным идеям обобщается в таблице 13 и проиллюстрирована на фиг. 19. Реализации объектива 700 включают в себя первую группу линз, чтобы принимать луч импульсного лазерного скальпеля из Z-сканера 450, и вторую группу линз, чтобы принимать луч импульсного лазерного скальпеля из первой группы линз и фокусировать луч лазерного скальпеля на целевую область. Таблица 13 подробнее иллюстрирует объектив 700 по фиг. 19 через поверхности 1-16. Объектив 700 имеет девять линз L1-L9 и связывается с интерфейсом 800 пациента через поверхность 17. Как указано выше, скобки указывают диапазоны, которые соответствующие параметры могут допускать. (Поверхности 1 и 2 задают пару линз L1/L2, а поверхности 8 и 9 задают пару линз L5/L6, следовательно, предусмотрено 16 поверхностей вместо 18). В других реализациях, различное число линз может быть использовано с различными диапазонами параметров, которые сравнительно хорошо удовлетворяют вышеуказанным конструктивным соображениям. В некоторых реализациях, объектив 700 может быть описан с точки зрения группы линз. Например, объектив 700 может включать в себя первую группу линз, чтобы принимать XYZ-сканированный лазерный луч из Z-сканера 450, и вторую группу линз, чтобы принимать лазерный луч из первой группы линз. Вторая группа линз может включать в себя первую линзу с показателем преломления в пределах 1,54-1,72, входную поверхность с кривизной в пределах 37,9-65 1/м и выходную поверхность с кривизной в пределах (-15,4)-5,2 1/м. Дополнительно, вторая группа линз также может включать в себя вторую линзу, отделенную от первой линзы на расстояние в пределах 0-6,5 мм, с показателем преломления в пределах 1,56-1,85, входную поверхность с кривизной в пределах (-55,1)-(-21,8) 1/м и выходную поверхность с кривизной в пределах 11,4-26,8 1/м. Объектив 700 может выводить лазерный луч в интерфейс 800 пациента через вторую линзу. В некоторых реализациях, эквивалентное фокусное расстояние объектива 700 меньше 70 мм. В некоторых вариантах осуществления, расстояние от объектива 700 до интерфейса 800 пациента меньше 20 мм. В некоторых конструкциях, кривизна фокальной плоскости системы 1 доставки лазерного излучения превышает 20 1/м. Множество других реализаций объектива 700 и всей хирургической лазерной системы 1 также может создаваться согласно конструктивным принципам, выражаемым в данной заявке, посредством использования предлагаемого на рынке программного обеспечения для CAD в области оптических систем, такого как Zemax компании Zemax Development Corporation или Code V компании Optical Research Associates. 6. Оптические характеристики всей системы В различных реализациях, параметры модуля предкомпенсации подсистем 200, XY-сканера 300, Z-сканера 450 и объектива 700 могут быть взаимосвязанно оптимизированы, так что оптические характеристики всей системы 1 доставки лазерного излучения могут демонстрировать свойства, которые являются уникально полезными, например, для офтальмологических хирургических вариантов применения. Таблицы 14A-B обобщают оптические характеристики всей системы 1 доставки лазерного излучения в первой и второй реализации с точки зрения числовой апертуры NA и коэффициента S Штреля. Оптические характеристики также отличаются в опорных точках, аналогично вышеуказанным опорным точкам P1,..., P5. Таблицы 14A-B показывают оптические характеристики системы 1 доставки лазерного излучения с ее компонентами в конфигурациях A, B, C и D, доставляющих лазерный луч в центр роговицы (A), на периферию роговицы (B), в центр хрусталика глаза (C) и на периферию хрусталика глаза (D), соответственно. Эти опорные точки представляют большой хирургический объем, ассоциированный со сложностью выполнения офтальмологической хирургии на хрусталике глаза. Таблицы 14A-B показывают радиальные координаты опорных точек, имеющие конкретные значения. Тем не менее, в других вариантах осуществления NA и S допускают значения в идентичных соответствующих диапазонах "вокруг" этих конкретных радиальных координат. В некоторых случаях, термин "вокруг" означает диапазон радиальных координат в пределах процента P(radial) показанных значений радиальных координат, при этом P(radial) может быть одним из 10%, 20% и 30%. Например, точки, имеющие радиальную координату Z в диапазоне 7,2 мм и 8,8 мм, находятся в окрестности P(radial)=10% от радиальной координаты z=8,0 мм опорной точки "хрусталик глаза, центр". Кроме того, в некоторых вариантах осуществления, NA и S попадают только в один из трех соответствующих диапазонов, перечисленных для конфигураций B, C и D. В некоторых других вариантах осуществления, NA и S попадают в два из их трех соответствующих диапазонов, перечисленных для конфигураций B, C и D в таблицах 14A-B. Видимо, описанная система доставки лазерного излучения оптимально корректируется по существу до оптических характеристик с ограниченной дифракцией для всего хирургического объема хрусталика глаза.
r [мм]
z [мм]
r [мм]
Аналогичные конструкции, которые имеют коэффициент S Штреля выше 0,8, могут считаться эквивалентными вышеприведенным конструкциям, поскольку все эти конструкции считаются системами с ограниченной дифракцией.
Другие показатели аберрации, такие как радиус rf фокального пятна, также могут быть использованы, помимо коэффициента S Штреля, чтобы отличать полные оптические характеристики системы 1 доставки лазерного излучения. Поскольку большие коэффициенты Штреля, комбинированные с большими числовыми апертурами NA, преобразуются в небольшие радиусы rf фокального пятна, во всех конфигурациях A-D радиус rf фокального пятна может оставаться ниже 2 микронов в некоторых реализациях, в других ниже 4 микронов, а еще в других - ниже 10 микронов в окулярной целевой области.
Чтобы более точно отличать производительность системы доставки лазерного излучения и представлять реальное влияние роговицы и хрусталика глаза на распространение луча, значения NA и S таблиц 14A-B извлечены путем проектирования системы, включающей в себя глаз в качестве неразъемной части оптической конструкции. В некоторых конструкциях, глаз моделируется в его природной форме. Другими словами, степень патологического уплощения глаза включается, чтобы представлять подлинное хирургическое состояние.
Таблица 15 обобщает простую модель релевантных глазных тканей, как показано посредством моделированного человеческого глаза 850 на фиг. 19. (Нумерация поверхностей выбрана так, чтобы продолжать нумерацию таблицы 13 с началом в поверхности 18, при этом поверхность связывает интерфейс 800 пациента с тканью роговицы). Глазная ткань может моделироваться посредством роговицы толщиной 0,6 мм (при просмотре от интерфейса пациента через совместно используемую поверхность 18), внутриглазной жидкости (при просмотре от роговицы через поверхность 19) и хрусталика глаза (при просмотре от внутриглазной жидкости через поверхность 20). Разделения поверхностей глаза лечатся аналогично разделениям поверхностей 1-16 хрусталика глаза.
Значения NA и S таблиц 14A-B вычислены с использованием этой модели глазной ткани. Связанные модели глаза приводят к сравнимым показателям аберрации.
В отдельном дополнительном аспекте, в некоторых реализациях оптическая конструкция всей системы 1 доставки лазерного излучения может упрощаться посредством невыполнения корректировки некоторых искажений и кривизн поля посредством оптического средства.
Фиг. 20 иллюстрирует то, что в некоторых системах этот конструктивный принцип снижает преимущества точности позиционирования хирургической системы. Квадратные точки указывают положение фокального пятна, когда зеркало XY-сканера 300 сканирует с шагами в 1 градус, и Z-сканер 450 сканирует глубину Z-фокуса посредством перемещения подвижного расширителя 500 луча с шагами в 5 мм. Заметно, что "фокальная плоскость", заданная в качестве XY-сканированных местоположений фокального пятна при поддержании глубины Z-фокуса постоянной, искривлена. В поперечной периферии глубина разреза является меньшей в соответствии с известным поведением хрусталиков глаза с некорректированной кривизной поля.
Аналогично, если зеркала XY-сканера 300 поддерживаются неподвижными, и Z-сканер 450 сканирует глубину Z-фокуса, поперечное положение фокального пятна изменяется. Дополнительно усложняя конструкцию, ни радиальное поперечное положение XY, ни глубина Z-фокуса не демонстрируют линейную зависимость от соответствующих положений сканера. В плоскости XY эти искажения называются бочкообразными или подушкообразными искажениями. (Во многих реализациях, третья координата, азимутальный угол XY-сканера 300, преобразуется без изменений в азимутальный угол фокальных положений и, следовательно, должна подавляться).
Фиг. 21 иллюстрирует, как некоторые реализации системы 1 доставки лазерного излучения предлагают новые вычислительные решения описанных сложностей. Координаты сканера предоставляются в сферических координатах (ζ, χ, ϕ), при этом ζ является положением Z-сканера 450, χ является углом наклона XY-сканера 300 от оптической оси, и ϕ является азимутальным углом. Положения фокального пятна предоставляются посредством цилиндрических фокальных координат (z, r, ϕ), при этом z является глубиной Z-фокуса, r является радиальным расстоянием от оптической оси, а ϕ является азимутальным углом.
Азимутальный угол фокального положения может быть по существу идентичным азимутальному углу сканеров и, таким образом, не показан. Оставшиеся координаты XY- и Z-сканера (ζ, χ) могут дискретизироваться в соответствующих интервалах сканирования, задавая сетку сканирования и соответствующую матрицу Cij сканера, заданную в качестве Cij=(ζi, χj). Если фактические координаты сканера допускают значение (ζi0,χj0), то матрица Cij сканирования равна 1 в этой конкретной паре (i0, j0) и нулю для всех остальных пар (i, j).
Аналогично, положения фокального пятна могут отличаться посредством двумерной фокальной матрицы Skl, при этом Skl связана с дискретизированными радиальными и фокальными координатами (zk, rl) Z-глубины. С точки зрения матрицы Cij сканера и фокальной матрицы Skl, оптические характеристики системы 1 доставки лазерного излучения могут отличаться с помощью четырехмерной матрицы Tijkl преобразования, которая выражает то, как координаты сканера (ζi, χj) преобразуются фокальные координаты (zk, rl), в общем: S=TC, или подробно:

Хотя матрица Tijkl преобразования представляет линейную связь между матрицей Cij сканера и фокальной матрицей Skl, в некоторых других реализациях нелинейная взаимосвязь может существовать между матрицей Cij сканера и фокальной матрицей Skl. В этих реализациях, уравнение (5) заменяется посредством нелинейной связи.
Система 1 доставки лазерного излучения может быть выполнена с возможностью оптимизировать элементы матрицы T преобразования посредством вычислительной трассировки лучей, физической калибровки или комбинации вышеозначенного. Реализация способа физической калибровки описана в заявке на патент (США) US20090131921, которая может использоваться для такой цели.
Типично, матрица T преобразования является обратимой и может быть использована для того, чтобы создавать обратную матрицу преобразования, T-1, которая связывает элементы фокальной матрицы Skl с матрицей Cij сканера.
Альтернативно, в некоторых вариантах осуществления обратная матрица T-1 преобразования может быть определена непосредственно посредством начала процесса вычислительного проектирования с требуемой фокальной матрицей Skl в целевой области и использования, например, трассировки лучей, чтобы восстанавливать реконструировать матрицу Cij сканера.
Фиг. 21-22 иллюстрируют такие взаимосвязи. Эти фиг. 21-22 являются номограммами, иллюстрирующими то, на какие координаты сканера (ζi, χj) может настраиваться XY-сканер 300 или Z-сканер 450, чтобы фокусировать луч по фокальным координатам (zk, rl), показанным на осях Z и R.
Фиг. 21 показывает угол χ наклона XY-сканера 300, соответствующий фокальным координатам (z, r). В качестве примера, чтобы достигать Z-глубины z=6 мм и радиального положения r=4 мм, пунктирные линии указывают, что угол наклона XY-сканера χ=6,4 градусов может быть использован.
Фиг. 22 показывает то, что для того, чтобы достигать идентичных фокальных координат (z, r)=(4, 6), положение Z-сканера ζ=15,5 мм может быть использовано. В вычислительном отношении, номограммы могут сохраняться в компьютерном запоминающем устройстве в качестве таблиц поиска. Значения между сохраненными координатами поиска могут быть быстро определены посредством двумерной линейной или квадратичной интерполяции.
Сведения по матрице T преобразования и ее инверсии T-1дают возможность вариантам осуществления системы 1 доставки лазерного излучения корректировать аберрации по фиг. 20 посредством вычислительных способов вместо оптических способов. Эти варианты осуществления могут включать в себя вычислительный контроллер, который может управлять, по меньшей мере, одним из XY-сканера 300 и Z-сканера 450, чтобы управлять оптическим искажением системы 1 доставки лазерного излучения.
Фиг. 23 иллюстрирует то, что, например, если сканирование вдоль шаблона сканирования с уменьшенным оптическим искажением требуется в целевой области, например, вдоль плоской фокальной плоскости при предварительно определенной глубине z Z-фокуса, вычислительный контроллер может выполнять этапы следующего способа 900 вычислительного управления:
(910). Прием, по меньшей мере, одного из входных фокальных координат (zk, rl) и элементов фокальной матрицы Skl, соответствующей шаблону сканирования с уменьшенным оптическим искажением в целевой области;
(920). Вычисление или извлечение из сохраненного запоминающего устройства, по меньшей мере, одного из координат сканера (ζi, χj) и элементов матрицы Cij сканера, соответствующих входным фокальным координатам (zk, rl) или элементам фокальной матрицы Skl, с использованием предварительно определенной обратной матрицы (T-1)ijkl преобразования; и
(930). Управление, по меньшей мере, одним из Z-сканера 450 и XY-сканера 300 согласно вычисленным координатам сканера (ζi, χj), чтобы сканировать фокальное пятно согласно входным фокальным координатам (zk, rl) или элементам фокальной матрицы Skl.
Системы доставки лазерного излучения, имеющие такой вычислительный контроллер, могут уменьшать оптическое искажение относительно идентичных или аналогичных лазерных систем без таких контроллеров. Степень уменьшения может составлять целых 10% в некоторых вариантах осуществления и целых 30% в других вариантах осуществления.
Уменьшенное оптическое искажение может быть любым из аберрации, кривизны поля, бочкообразного искажения, подушкообразного искажения, искривленной фокальной плоскости и изогнутой линии сканирования, предназначенной быть параллельной оси Z.
В некоторых реализациях, вычислительный контроллер выполняет эти функции совместно с другими блоками системы доставки лазерного излучения, включающей в себя модуль 200 предкомпенсации, XY-сканер 300, Z-сканер 450 и объектив 700, возможно с помощью любого из их вышеописанных признаков.
Число возможных аналогичных реализаций является очень большим на основе принципа вычислительного управления, чтобы уменьшать оптические аберрации. Например, вычислительный контроллер в некоторых вариантах осуществления может допускать сканирование фокального пятна на фокальной плоскости с кривизной ниже критического значения кривизны. В некоторых других реализациях, поверхности с предварительно определенными формами могут сканироваться с помощью надлежащей операции вычислительного контроллера.
Хотя этот документ содержит множество конкретных сведений, они должны истолковываться не как ограничения на объем изобретения или формулу изобретения, а вместо этого как описания признаков, конкретных для определенных вариантов осуществления изобретения. Определенные признаки, которые описываются в этом документе в контексте отдельных вариантов осуществления, также могут быть реализованы комбинированно в одном варианте осуществления. Наоборот, различные признаки, которые описываются в контексте одного варианта осуществления, также могут быть реализованы в нескольких вариантах осуществления по отдельности или в любой подходящей субкомбинации. Кроме того, хотя признаки могут описываться выше как работающие в определенных комбинациях и даже первоначально задаваться в формуле изобретения таким образом, один или более признаков из заявленной комбинации могут в некоторых случаях быть исключены из комбинации, и заявленная комбинация может быть направлена на субкомбинацию или изменение субкомбинации.
Раскрыто определенное число реализаций контролируемых по изображениям лазерных хирургических технологий, установок и систем. Тем не менее, изменения и улучшения описанных реализаций и другие реализации могут осуществляться на основе вышеописанного.
Реферат
Группа изобретений относится к медицине. Офтальмологическая лазерная система, содержащая: лазерный источник, который формирует лазерный луч из лазерных импульсов; XY-сканер, который сканирует лазерный луч в направлениях, поперечных к оси Z; Z-сканер, который сканирует лазерный луч вдоль оси Z и включает в себя: непрерывный Z-сканер, который обеспечивает непрерывное сканирование лазерного луча вдоль оси Z; и пошаговый Z-сканер, который обеспечивает пошаговое сканирование лазерного луча вдоль оси Z, пошаговый Z-сканер имеет одну или более перемещаемых линз, при этом перемещаемые линзы могут быть размещены в и вне пути лазерного луча. При этом способ содержит этапы, на которых формируют лазерный луч посредством лазерного источника; осуществляют Z-сканирование глубины фокуса лазерного луча посредством непрерывного Z-сканера, и осуществляют Z-сканирование глубины фокуса лазерного луча посредством пошагового Z-сканера путем размещения одной или более перемещаемых линз пошагового Z-сканера на пути лазерного луча. 2 н. и 23 з.п. ф-лы, 23 ил., 14 табл.
Формула
- лазерный источник, который формирует лазерный луч из лазерных импульсов;
- XY-сканер, который сканирует лазерный луч в направлениях, поперечных к оси Z;
- Z-сканер, который сканирует лазерный луч вдоль оси Z и включает в себя:
- непрерывный Z-сканер, который обеспечивает непрерывное сканирование лазерного луча вдоль оси Z; и
- пошаговый Z-сканер, который обеспечивает пошаговое сканирование лазерного луча вдоль оси Z,
- пошаговый Z-сканер имеет одну или более перемещаемых линз, при этом:
- перемещаемые линзы могут быть размещены в и вне пути лазерного луча.
- пошаговый Z-сканер выполнен с возможностью Z-сканирования глубины фокуса офтальмологической лазерной системы пошагово посредством шагов по оси Z; и
- непрерывный Z-сканер выполнен с возможностью Z-сканирования глубины фокуса офтальмологической лазерной системы непрерывно в диапазонах непрерывного сканирования, соответствующих шагам по оси Z.
- Z-сканер конфигурируется так, что диапазоны непрерывного сканирования превышают один или более шагов по оси Z, тем самым:
- диапазоны непрерывного сканирования, в которых глубина фокуса может быть Z-сканирована с помощью непрерывного Z-сканера в соседних шагах по оси Z, перекрываются; и
- оператор офтальмологической лазерной системы допускает Z-сканирование глубины фокуса в диапазоне квазинепрерывного Z-сканирования.
- общий диапазон Z-сканирования имеет длину в одном из диапазонов 0-5 мм, 5-10 мм, 10-30 мм и 0-15 мм.
- пошаговый Z-сканер допускает установку глубины фокуса:
- на первый Z-уровень, позволяя хирургу выполнять процедуру на роговице глаза в диапазоне непрерывного сканирования около первого Z-уровня; и
- на один или более вторых Z-уровней, позволяя хирургу выполнять процедуру на хрусталике глаза в диапазонах непрерывного сканирования вокруг одного или более вторых Z-уровней.
- Z-сканер выполнен с возможностью поддерживать аберрацию лазерного луча лучше порогового значения в целевой области.
- аберрация офтальмологической лазерной системы может отличаться посредством коэффициента S Штреля; и
- коэффициент S Штреля выше порогового значения S(threshold) в целевой области, при этом:
- S(threshold) имеет одно из значений 0,6, 0,7, 0,8 и 0,9.
- коэффициент S Штреля выше S(threshold) в одной или более из пяти опорных точек в целевой области, при этом:
- пять опорных точек определяются посредством цилиндрических координат (z, r) в целевой области как Р1=(0,0), Р2=(2,6), Р3=(5,0), Р4=(8,0), Р5=(8,3), в миллиметрах, под любым азимутальным углом ϕ, относительно передней стороны и центра целевой области в (0, 0).
- аберрация офтальмологической лазерной системы может отличаться посредством радиуса rf фокального пятна; и
- радиус rf фокального пятна меньше порогового значения rf (threshold) в целевой области, при этом:
- rf (threshold) составляет одно из 2, 3, 4, 5 и 6 микрометров.
- радиус rf фокального пятна меньше rf (threshold) в одной или более из пяти опорных точек в целевой области, при этом:
- пять опорных точек определяются посредством цилиндрических координат (z, r) в целевой области как Р1=(0,0), Р2=(2,6), Р3=(5,0), Р4=(8,0), Р5=(8,3), в миллиметрах, под любым азимутальным углом ϕ, относительно передней стороны и центра целевой области в (0, 0).
- аберрация является одной из сферической аберрации, комы, астигматизма и хроматической аберрации.
- перемещаемые линзы могут быть размещены в последовательности конфигураций, которые перемещают глубину фокуса лазерного луча с предварительно определенных шагами по оси Z.
- различные перемещаемые линзы выполнены с возможностью перемещать глубину фокуса пропорционально длине базового шага по оси Z, умноженной на различные степени 2.
- число перемещаемых линз составляет одну из одной, двух, трех и четырех.
- перемещаемая линза может перемещаться по пути лазерного луча посредством по меньшей мере одного из следующего: механический ползунок, механический актуатор, поворотный рычаг и электромеханическая аппаратная система.
- непрерывный Z-сканер размещается между лазерным источником и XY-сканером; и
- пошаговый Z-сканер размещается после XY-сканера на пути лазерного луча.
- непрерывный Z-сканер размещается после XY-сканера на пути лазерного луча.
- непрерывный Z-сканер содержит первый блок, размещенный между лазерным источником и XY-сканером; и
- второй блок, размещенный после XY-сканера на пути лазерного луча.
- формируют лазерный луч посредством лазерного источника;
- осуществляют Z-сканирование глубины фокуса лазерного луча посредством непрерывного Z-сканера; и
- осуществляют Z-сканирование глубины фокуса лазерного луча посредством пошагового Z-сканера путем размещения одной или более перемещаемых линз пошагового Z-сканера на пути лазерного луча.
- Z-сканирование посредством пошагового Z-сканера содержит этап, на котором осуществляют Z-сканирование глубины фокуса в пошаговых шагах по оси Z; и
- Z-сканирование посредством непрерывного Z-сканера содержит этап, на котором осуществляют Z-сканирование глубины фокуса в диапазонах непрерывного сканирования, соответствующих пошаговым шагам по оси Z.
- один или более диапазонов непрерывного сканирования превышают шаги по оси Z, тем самым:
- диапазоны непрерывного сканирования, в которых глубина фокуса может быть Z-сканирована с помощью непрерывного Z-сканера в соседних шагах по оси Z, перекрываются; и
- оператор офтальмологической лазерной системы допускает Z-сканирование глубины фокуса в диапазоне квазинепрерывного Z-сканирования.
- переводят пошаговый Z-сканер на первый Z-уровень;
- выполняют хирургическую операцию на роговице посредством Z-сканирования глубины фокуса с помощью непрерывного Z-сканера;
- переводят пошаговый Z-сканер на один или более вторых Z-уровней; и
- выполняют хирургическую операцию на хрусталике глаза посредством Z-сканирования глубины фокуса с помощью непрерывного Z-сканера.
- размещают перемещаемые линзы в последовательности конфигураций, которые Z-сканируют глубину фокуса при предварительно определенных Z-приращениях.
- перемещают глубину фокуса пропорционально базовому шагу по оси Z, умноженному на различные степени 2, посредством перемещения различных перемещаемых линз в и за пределы пути лазерного луча.
- осуществляют Z-сканирование глубины фокуса с помощью непрерывного Z-сканера до глубины фокуса почти в максимум первого диапазона непрерывного сканирования;
- увеличивают глубину фокуса с пошаговым шагом по оси Z посредством пошагового Z-сканера;
- сбрасывают непрерывный Z-сканер почти до минимума второго диапазона непрерывного сканирования; и
- осуществляют Z-сканирование глубины фокуса во втором диапазоне непрерывного сканирования.
Комментарии