Силоизмерительный катетер с присоединенной центральной распоркой - RU2506965C2
Код документа: RU2506965C2
Чертежи

















Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение касается медицинского устройства для использования в сосудах пациента с целью диагностирования и лечения пациента, например картирования ткани и/или абляции ткани с использованием радиочастот (RF) или других источников энергии. Конкретнее, изобретение касается катетера, имеющего центральную распорку, закрепленную в наконечнике катетера для определения неразъемной составной конструкции наконечника, которая максимально увеличивает открытый внутренний объем наконечника катетера и жесткость на кручение наконечника катетера и при этом минимизирует внешний диаметр наконечника катетера и обеспечивает однородный изгиб наконечника в плоскости. На присоединенной центральной распорке зафиксированы один или более тензометрических датчиков силы для измерения изгиба наконечника катетера, а также аксиальных и боковых сил, действующих на наконечник. Катетер может также включать в себя тяговые нити для изгиба участка наконечника катетера.
УРОВЕНЬ ТЕХНИКИ
Многие патологические состояния человека и других млекопитающих связаны с заболеванием или иным отклонением от норм выстилки или стенок, которые ограничивают различные пространства в организме. Для лечения патологических состояний в пространствах в организме методики применения медицинских устройств выполняются с возможностью проведения различных терапевтических воздействий на пространства в организме наименее инвазивным образом.
Здесь термин «пространство в организме» и в том числе его производные предполагает обозначение любой полости в организме, которая ограничена, по меньшей мере, частично, стенкой из ткани. Например, камеры сердца, матка, участки желудочно-кишечного тракта, а также артериальные и венозные сосуды рассматриваются как наглядные примеры пространств в организме в рамках подразумеваемого значения термина.
Термин «сосуд» и в том числе его производные предполагает обозначение любого пространства в организме, которое ограничено по своей длине стенкой из ткани в форме трубки и которое оканчивается на каждом из двух концов, по меньшей мере, одним отверстием, которое сообщается с внешней средой за пределами этого пространства в организме. Например, большой и малый кишечник, семявыносящий проток, трахея и фаллопиевы трубы представляют собой наглядные примеры сосудов в рамках подразумеваемого значения термина. Кровеносные сосуды здесь также рассматриваются как сосуды, включая участки сосудистой сети между их точками разветвления. Конкретнее, легочные вены являются сосудами в рамках подразумеваемого значения термина, в том числе область легочных вен между разветвленными участками их отверстий вдоль стенки левого желудочка, несмотря на то, что ткань стенок, определяющая отверстия, обычно представляет собой исключительно суживающиеся полостные формы.
Один из способов лечебного воздействия на пространства в организме в минимально инвазивной форме заключается в использовании катетеров для того, чтобы получить доступ к внутренним органам и сосудам в пределах пространства в организме. Электродные или электрофизиологические катетеры (EP) широко используются в медицинской практике на протяжении многих лет. Они применяются для стимуляции и составления карт электрической активности сердца, а также для абляции участков с ненормальной электрической активностью. На практике электродный катетер вводится в основную вену или артерию, например в бедренную артерию, и далее проводится в ту полость сердца, которая является проблемной, для выполнения процедуры абляции.
В патенте США №6,272,672 (Ben-Heim) раскрыто использование одного или нескольких пьезоэлектрических элементов, или датчиков деформации для формирования сигналов, несущих информацию об изгибе относительно осей катетера. В то время как в этом патенте обсуждается использование таких датчиков для измерения и отображения изгиба катетера применительно к пользователю, в нем не обеспечивается средство для точного измерения силы, действующей на наконечник катетера.
В патенте США №6,612,992 (Rambow и др.) раскрыт ультразвуковой катетер, в котором используется множество датчиков деформации, размещенных по периферии катетера, для обеспечения информации, касающейся расположения катетера в сердечно-сосудистой системе, однако отсутствуют указания по поводу измерения силы, действующей на наконечник катетера.
Поскольку EP-катетеры используются в большей части процедур, в которых стоит вопрос о перфорации ткани, было бы желательно иметь электрод наконечника, обеспечивающий дополнительную обратную связь по таким параметрам, как определение силы и контакт с тканью, при сохранении тех же характеристик, которыми обладают существующие электроды наконечников EP-катетеров.
Кроме того, поскольку EP-катетеры используются для абляции динамически подвижной ткани, существует необходимость в катетере, который точно измеряет силу, действующую на наконечник катетера, и при этом обладает желательными характеристиками при изгибе, таком как изгиб в плоскости.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение направлено на катетер, который имеет встроенные датчики для измерения силы, действующей на наконечник катетера, и при этом обеспечивает информацию в отношении изгиба тела катетера. Катетер по настоящему изобретению можно легко реализовать как двунаправленный управляемый катетер, имеющий превосходные характеристики при изгибе в плоскости. Катетер содержит удлиненное трубчатое тело катетера, имеющее, по меньшей мере, одну полость, продолжающуюся через него, а также способную к изгибу трубчатую секцию наконечника, имеющую центральную распорку и две полуцилиндрические полости, продолжающиеся через нее. Центральная распорка закреплена, предпочтительно термическим способом, на внутренней части трубчатого катетера по существу по всей длине центральной распорки, образуя тем самым неразъемную конструкцию наконечника. Один или более датчиков деформации зафиксированы на центральной распорке, обеспечивая систему информацией о силе, действующей на наконечник, и изгибе тела катетера.
Датчики деформации зафиксированы на присоединенной центральной распорке с определенной пространственной ориентацией. Изгибная деформация детектируется датчиком деформации, зафиксированным параллельно продольной оси распорки. Деформация при кручении детектируется двумя датчиками деформации, ориентированными под углом 90 градусов друг к другу и под углом 45 градусов относительно продольной оси распорки. Поскольку отслеживаются деформации присоединенной центральной распорки как при изгибе, так и при кручении, а распорка присоединена по своей продольной кромке по внутреннему диаметру удлиненного трубчатого элемента, можно определить силы, приложенные к внешнему диаметру наконечника катетера. Для повышения чувствительности в месте расположения датчиков деформации при кручении, на центральной распорке может быть выполнена шейка или сделаны пазы для обеспечения средства усиления измеряемой деформации. Датчик деформации может представлять собой датчик деформации на основе кремния или датчик деформации на основе металлической фольги. Схема для определения деформации на основе сопротивления, измеряемого датчиком сопротивления, находится в рукоятке катетера и/или в системе для навигации или абляции, с которой соединен катетер. Большинство металлических сплавов, используемых в датчиках деформации, проявляют практически линейное изменение калибровочного множителя в широком диапазоне температур, которое составляет менее ±1% в диапазоне температур ±100ºС. При двухпроводной схеме ошибка, привносимая сопротивлением выводного провода, является функцией отношения сопротивлений R1/Rg. Ошибка, обусловленная выводным проводом, обычно несущественна, если сопротивление (R1) выводного провода мало по сравнению с сопротивлением (Rg) датчика, но если сопротивление выводного провода превышает 0,1%, следует обеспечить температурную компенсацию для выводного провода, чтобы повысить точность измерений. Температурная компенсация требуется датчикам деформации на основе кремния. Температурная компенсация может основываться на применении датчиков температуры, используемых в качестве средства управления с обратной связью в катетерах для абляции.
Катетер дополнительно содержит первую и вторую тяговые нити, которые имеют проксимальный и дистальный концы. Каждая тяговая нить продолжается от рукоятки управления на проксимальном конце тела катетера через полость в теле катетера в одну из полостей в секции наконечника. Тяговые нити могут размещаться в пустотелом рукаве, размеры которого подобраны так, чтобы поддерживать тесную взаимосвязь между тяговыми нитями. Дистальные концы тяговых нитей зафиксированы либо на противоположных концах центральной распорки либо на электроде наконечника, либо на трубчатой конструкции дистальной секции наконечника катетера.
Рукоятка управления включает в себя блок управления, в котором имеется рычаг, несущий на себе пару шкивов для подтягивания соответствующих тяговых нитей для того, чтобы изогнуть секцию наконечника катетера. Шкивы установлены с возможностью вращения на противоположных участках рычага так, чтобы один шкив приводился в движение дистально, в то время как другой шкив приводился в движение проксимально при повороте рычага. Поскольку каждая тяговая нить натянута на соответствующий шкив, поворот рычага приводит к тому, что шкив, который приводится в движение проксимально, подтягивает свою тяговую нить для того, чтобы изогнуть секцию наконечника в направлении внеосевой полости, в которой проходит эта тяговая нить.
В частности, настоящее изобретение заключается в составном наконечнике катетера, который содержит экструдированную тонкостенную эластомерную трубку, имеющую армирующую оплетку со спиральной намоткой, причем эластомерная трубка имеет центральную распорку, которая состоит из тонкой удлиненной прямоугольной металлической полоски, причем оба тонких удлиненных края (кромки) упомянутой полоски присоединены, предпочтительно термическим способом, к внутренней стенке эластомерной трубки, образуя тем самым составную конструкцию с неразъемными звеньями. Термин «неразъемные» использован для описания составной конструкции, образованной эластомерной трубкой и металлической полоской, в которой любая попытка разделить металлическую трубку и металлическую полоску приведет к необратимому разрушению составной конструкции.
Данная составная конструкция наконечника обеспечивает наличие двух больших диаметрально противоположных полостей в форме полумесяца, которые продолжаются через наконечник, обеспечивая пространство для размещения проводки, датчиков, трубчатого канала для переноса текучей среды и т.п. Распорка, разделяющая полости в форме полумесяца, может быть выполнена из любого из сверхупругих (металлических) сплавов, таких как нитинол, бета-титановый сплав или пружинная закаленная нержавеющая сталь. Данная конструкция составного наконечника катетера максимально увеличивает площадь поперечного сечения открытых полостей в наконечнике катетера, а также жесткость на кручение наконечника катетера, и при этом минимизирует внешний диаметр наконечника катетера путем обеспечения одинакового момента инерции сечения в каждом сечении наконечника катетера вдоль продольной оси, поскольку присоединенная центральная распорка и эластомерная трубка не могут перемещаться относительно друг друга при изгибе наконечника. Данная составная конструкция обеспечивает однородный изгиб наконечника в плоскости и равномерно распределенные крутящие и изгибающие силы независимо от угла изгиба наконечника, т.к. момент инерции поперечного сечения остается постоянным вдоль всей длины наконечника при изгибе наконечника. Все известные конструкции наконечников предшествующего уровня техники характеризуются переменным моментом инерции поперечного сечения при изгибе наконечника, поскольку внутренняя распорка и наружная эластомерная трубка прикреплены друг к другу только в областях их проксимального и дистального концов, и при изгибе наконечника распорка и наружная трубка перемещаются относительно друг друга. Во всех конструкциях предшествующего уровня техники положение объединенной центральной оси независимо перемещающихся распорки и наружной трубки постоянно изменяется в процессе изгиба наконечника, поскольку абсолютное расстояние между центральной осью единого целого (распорки и наружной трубки) и центральной осью каждой из частей изменяется. Это приводит к появлению неоднородных крутящей и изгибающей сил, которые зависят от степени изгиба наконечника.
Профиль кривой изгиба может быть изменен путем изменения момента инерции сечения для сечения распорки, перпендикулярного продольной оси распорки, используя обработку резанием или калибрование, что приводит либо к удалению материала либо к изменению толщины материала на различных участках сечения центральной распорки. У составного изгибающегося наконечника с присоединенной центральной распоркой отношение ширины к толщине велико, что обеспечивает наличие первой центральной оси, момент инерции сечения вокруг которой велик, а также второго соответствующего малого момента инерции сечения вокруг центральной оси, ортогональной первой центральной оси, обеспечивая тем самым исключительные характеристики при изгибе в плоскости.
Настоящее изобретение обеспечивает единую унифицированную составную конструкцию, обладающую высокими характеристиками, для изгибающегося узла сборки наконечника катетера, способного к изгибу, в которой сочетаются характеристики эластомеров и металлов и исключаются сердцевинные полости, полученные путем экструзии. Две полуцилиндрические полости, образованные присоединенной распоркой, обеспечивают большой объем для размещения проводки, датчиков для измерения сил, действующих на наконечник, и локационных датчиков, а также полостей наконечника, предназначенных для ирригации. По альтернативному варианту может быть обеспечен промежуточный участок между секцией наконечника, способной к изгибу, и электродом наконечника, на котором центральная распорка отсутствует, и где обеспечивается еще больше места для датчиков температуры и локационных датчиков. Диаметры наконечника катетера могут быть уменьшены, поскольку рабочий объем полости наконечника при такой конструкции максимально увеличен.
В предпочтительном варианте осуществления катетера удлиненный трубчатый элемент, имеющий проксимальный конец и дистальный конец, а также имеющий полость, термическим способом присоединен к продольным кромкам центральной распорки, которая проходит по способному к изгибу участку катетера. Данное соединение образует неразъемную сборную конструкцию, состоящую из удлиненного трубчатого элемента и центральной распорки.
Электрод наконечника размещен на дистальном конце трубчатого элемента. Отформованное соединительное звено имеет дистальный участок, выполненный с возможностью приема участка проксимального конца электрода наконечника, а также проксимальный участок, имеющий, по меньшей мере, один паз, выполненный с возможностью приема, по меньшей мере, одной из первой или второй продольных кромок центральной распорки.
Дистальный конец центральной распорки содержит, по меньшей мере, одну выемку, способную к зацеплению с защелкиванием, а отформованное соединительное звено дополнительно содержит, по меньшей мере, один клин, способный к зацеплению с защелкиванием, выполненный с возможностью приема выемки, способной к зацеплению с защелкиванием. Такая конструкция позволяет произвести быструю сборку электрода наконечника, сборного трубчатого элемента и центральной распорки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фиг.1А-1С показаны виды в плоскости способного к изгибу EP-катетера с рукояткой управления изгибом кулисного типа по настоящему изобретению.
На Фиг.1D показан вид в плоскости ручки регулирования трения, расположенной на рукоятке управления изгибом кулисного типа.
На Фиг.2 показан вид в продольном сечении способной к изгибу дистальной секции наконечника, а также участка проксимальной секции катетера, представленного на Фиг.1, включая в себя тензометрические датчики силы на присоединенной центральной распорке.
На Фиг.3 показан вид в сечении трубчатой секции EP-катетера, представленной на Фиг.2, в секущей плоскости А-А.
На Фиг.4 показан покомпонентный вид в перспективе дистального наконечника варианта осуществления способного к изгибу катетера по настоящему изобретению.
На Фиг.5 показан вид в перспективе электрода наконечника способной к изгибу секции наконечника катетера по настоящему изобретению.
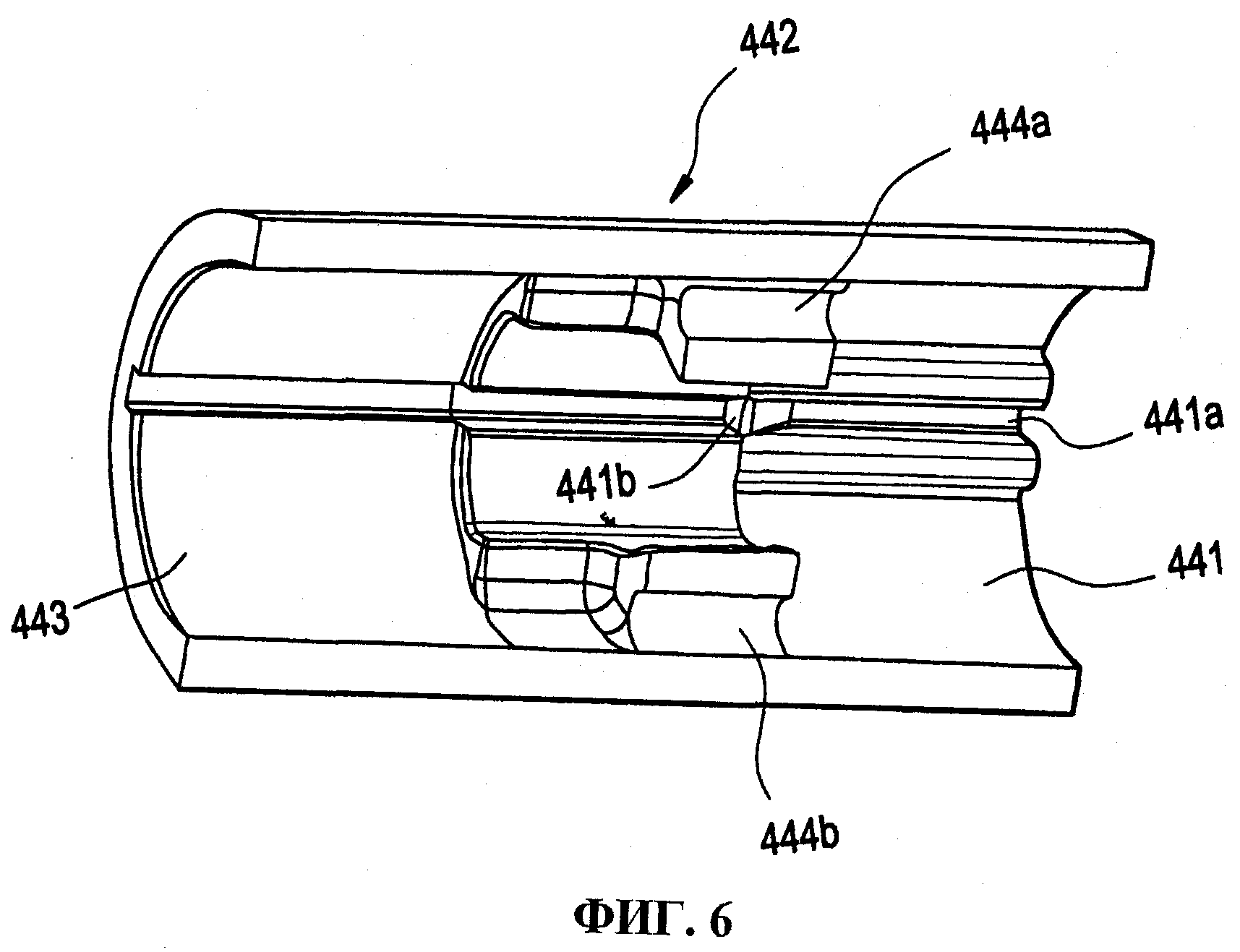
На Фиг.6 показан вид в сечении в перспективе отформованного соединительного звена способной к изгибу секции наконечника катетера по настоящему изобретению.
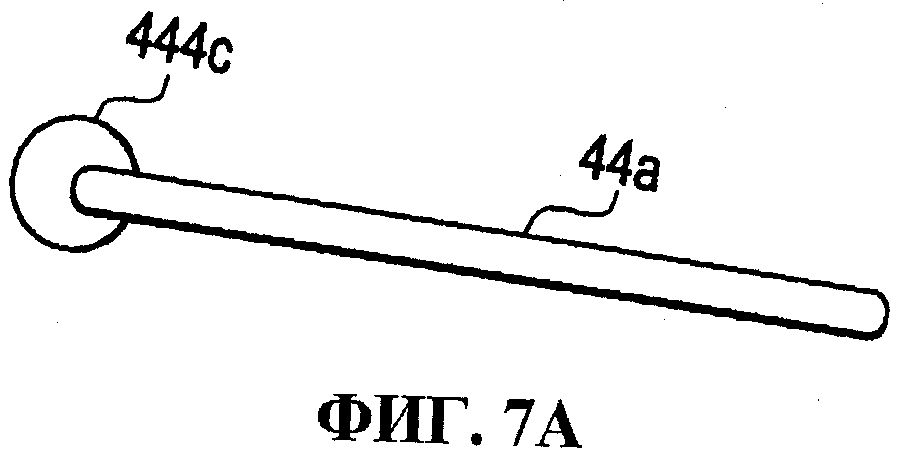
На Фиг.7а показан вид в плоскости тяговой нити для использования в способной к изгибу секции наконечника катетера по настоящему изобретению.
На Фиг.7b показан вид в перспективе дистальной секции способного к изгибу катетера по настоящему изобретению.
На Фиг.8 показан вид сбоку центральной распорки по дополнительному варианту осуществления способной к изгибу секции наконечника катетера по настоящему изобретению.
На Фиг.9 показан вид в перспективе устройства для изготовления способной к изгибу секции наконечника катетера по настоящему изобретению.
На Фиг.10 показан вид в перспективе дистального наконечника способного к изгибу катетера по настоящему изобретению.
На Фиг.11 показан вид в перспективе дистального наконечника способного к изгибу катетера по настоящему изобретению.
На Фиг.12 показан вид в плоскости участка присоединенной центральной распорки, имеющей тензометрические датчики силы, которые на ней установлены.
На Фиг.13 показан вид в плоскости тензометрического датчика силы для использования в катетере настоящего изобретения.
На Фиг.14 изображена схема для измерения силы для использования в способном к изгибу катетере, имеющем тензометрический датчик, выполненный по технологии микроэлектромеханических систем на кремниевой подложке по настоящему изобретению.
На Фиг.15 изображена схема для измерения силы для использования в способном к изгибу катетере, имеющем тензометрический датчик на основе металлической фольги по настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На Фиг.1А-1С изображен вид в плоскости варианта осуществления способного к изгибу катетера по настоящему изобретению. Как показано на Фиг.1В, предпочтительный катетер 100 содержит удлиненное трубчатое тело катетера, имеющее проксимальную секцию 32, дистальную секцию 34 наконечника, а также рукоятку 36 управления на проксимальном конце проксимальной секции 32. Электрод 38 наконечника и возможный кольцевой электрод 40 располагаются в способной к изгибу дистальной секции 34 наконечника или близко к ней так, чтобы обеспечить источник энергии для проведения абляции, если требуемое устройство представляет собой катетер для радиочастотной абляции, или для приема электрических сигналов, если катетер представляет собой диагностический катетер для электрофизиологического картирования. Рукоятка 36 управления может иметь различную конструкцию, допускающую приложение усилия по натяжению к тяговым нитям, используемым для изгиба способной к изгибу секции 34 наконечника. Предпочтительно рукоятка 36 управления представляет собой рукоятку, используемую в группе продуктов двустороннего действия Biosense EZ-Steer, рукоятка управления которой изображена на Фиг.1А-С. Рычаг 37 «кулисного» типа подтягивает одну из двух тяговых нитей для изгиба наконечника катетера в одном направлении (Фиг.1А), а затем, наоборот, может сделать выбор в пользу второй (противоположной) тяговой нити для изгиба наконечника катетера в другом направлении (Фиг.1С). Рукоятка 36 управления имеет также подвижный ролик 37а для регулирования трения, показанный на Фиг.1D, который позволяет оперирующему хирургу использовать кулисный рычаг 37 в свободном состоянии или отрегулировать натяжение, чтобы зафиксировать кулисный рычаг 37 и изогнутый наконечник в определенном положении. Величина трения при перемещении кулисного рычага 37 возрастает с поворотом ролика 37а регулировки трения по часовой стрелке до достижения положения его полной фиксации.
На Фиг.2 изображен вид в сечении перехода от проксимальной секции 32 к способной к изгибу секции 34 катетера 100 перпендикулярно центральной распорке 80, образующей участок катетера, а на Фиг.3 изображено сечение катетера, представленного на Фиг.2, в плоскости по линии А-А. Катетер 100 содержит удлиненную трубчатую конструкцию, имеющую центральную полость 58, проходящую через дистальный участок 32, и две полуцилиндрические полости 58а и 58b на способном к изгибу участке 34 наконечника. Проксимальная секция 32 обладает гибкостью, но по существу не поддается сжатию по своей длине. Проксимальная секция 32 может иметь любую пригодную конструкцию и может быть выполнена из любого пригодного материала. Предпочтительная конструкция содержит наружную стенку 30, выполненную из термопластического эластомера Pellethane или PEBAX, и возможную внутреннюю стенку 18. Наружная стенка 30 может также содержать уложенную сеточную обмотку из нержавеющей стали или схожего материала для увеличения жесткости при кручении так, чтобы при повороте рукоятки 36 управления дистальный конец проксимальной секции 32 так же как и дистальная секция 34 поворачивались соответствующим образом.
Полная длина катетера варьируется в зависимости от сферы его применения, однако предпочтительная длина находится в пределах примерно от 90 до 120 см, более предпочтительно - в пределах примерно от 100 до 110 см. Наружный диаметр проксимальной секции 32 также является расчетной характеристикой, которая изменяется в зависимости от области применения катетера, но предпочтительно составляет менее примерно восьми French (Fr). Возможная внутренняя стенка 18 содержит полимерную трубку, которая может быть разделена на слои по спирали и размер которой подобран так, чтобы наружный диаметр был примерно того же размера, или незначительно менее, чем внутренний диаметр наружной стенки 30, что обеспечивает дополнительную жесткость, регулируемую углом наклона при разделении на слои по спирали.
В представленном варианте осуществления дистальная секция 34 и проксимальная секция 32 являются отдельными конструкциями, которые скреплены между собой. Проксимальная секция 32 и дистальная секция 34 могут крепиться с использованием полиуретанового клея на соединении 35 между двумя секциями. Другие способы крепления включают в себя соединение проксимальной и дистальной секций с использованием нагрева для сплавления секций между собой.
В EP-катетере настоящего изобретения электрод 38 наконечника и возможные кольцевые электроды 40, показанные на Фиг.1А-1С, каждый электрически соединен со жгутом выводных проводов 70. Каждый провод в жгуте выводных проводов 70 продолжается от рукоятки 36 управления через полость 58 в проксимальной секции 32 и через одну из полостей 58а или 58b в дистальной секции 34 к электроду 38 наконечника и возможному кольцевому электроду (или электродам) 40. Проксимальный конец каждого выводного провода 70 соединен с соответствующим соединительным звеном (не показано) в рукоятке 36 управления, которая может быть соединена с соответствующим источником радиочастотной энергии или с системой электрофизиологического картирования, или иной диагностической или терапевтической системой.
Полость 90 для ирригации обеспечивает канал для переноса жидкости от проксимально конца катетера к дистальному участку 34 наконечника. Полость 90 для ирригации находится в жидкостной связи с одним или более жидкостным портом в электроде 38 наконечника. На Фиг.4 и 5 представлена возможная схема расположения жидкостных портов 439 для ирригации в электроде наконечника. Полость 90 для ирригации используется для переноса ирригационной жидкости через катетер и через жидкостные порты в наконечнике для того, чтобы снизить коагуляцию жидкостей организма, таких как кровь, на электроде наконечника или вблизи него.
В двунаправленном катетере пара тяговых нитей 44а и 44b продолжается через полость 58 в проксимальной секции 32 и каждая из них проходит через одну из полостей 58а и 58b в дистальной секции 34. Тяговые нити выполнены из любого пригодного материала, такого как нержавеющая сталь или проволока из нитинола или неметаллические волокна, например материал Вектран. Предпочтительно каждая тяговая нить имеет смазывающее покрытие, такое как политетрафторэтилен или подобный материал. Каждая тяговая нить 44 проходит от рукоятки 36 управления практически до конца дистальной секции 34.
Рукав или рукава (не показаны) могут использоваться для размещения тяговых нитей проксимально до мягкого наконечника катетера. Рукав используется для удерживания каждой тяговой нити на соответствующей стороне центральной распорки. При двунаправленном изгибе противодействующие тяговые нити всегда размещаются в отдельных полостях. При такой конструкции размещение нескольких тяговых нитей в одной полости может использоваться для получения различных кривых изгиба в одном направлении изгиба. Такой рукав может быть выполнен из любого пригодного материала, например полиамида или полиуретана.
Примеры других пригодных рукояток 36 управления, которые могут использоваться по настоящему изобретению, описаны в патентах США №6,123,699, 6,171,277, 6,183,463 и 6,198,974, раскрытие которых включено в настоящее описание путем ссылки. В таких рукоятках управления проксимальное перемещение блока управления большим пальцем руки относительно корпуса рукоятки приводит к проксимальному перемещению первого штока и первой тяговой нити относительно корпуса рукоятки и тела катетера, что приводит к изгибу секции наконечника в направлении полости, в которой проходит первая тяговая нить. Дистальное перемещение блока управления большим пальцем руки относительно корпуса рукоятки приводит к дистальному перемещению первого штока, что вызывает проксимальное перемещение второго штока и тяговой нити относительно корпуса рукоятки и тела катетера, что приводит к изгибу секции наконечника в направлении полости, в которой проходит вторая тяговая нить. Могут использоваться дополнительные схемы компоновки тяговых нитей 44 и зубчатой передачи в рукоятке управления, на подобии раскрытых в патенте США №7,077,823, который также включен в настоящее описание путем ссылки.
В состав дистальной секции 34 входят внутренний слой 62, слой 64 оплетки и наружный слой 66 дистальной секции наконечника. Внутренний слой 62 дистальной секции 34 катетера представляет собой тонкий слой из термопластического эластомерного материала, толщина которого предпочтительно составляет 0,0025-0,0035 дюйма. Внутренний слой 62 является слоем 64 оплетки из синтетических волокон, диаметр которого составляет приблизительно 0,002-0,003 дюйма. В предпочтительном варианте осуществления синтетическое волокно представляет собой моноволокно, изготовленное на основе полиэтиленнафталата (Pen) по технологии Biogeneral Advanced Fiber Technology. Наружный слой 66 представляет собой эластомерный материал, нанесенный путем экструдирования на внутренний слой с оплеткой. Внутренний слой 62 и наружный слой 66 могут изготавливаться из эластомеров, обладающих одинаковой твердостью по Шору, или из материалов с различной твердостью по Шору. Предпочтительно эластомер представляет собой PEBAX или Pellethane в силу их технологичности и высокой теплостойкости при изгибе.
Кроме того, может быть использована страховочная нить 95 для крепления электрода наконечника к стержню катетера в целях предотвращения отсоединения электрода наконечника. Страховочная нить предпочтительно представляет собой 0,0065 дюймовую монель, которая проходит через полость 58 на проксимальном участке 32 катетера, а также через одну из двух полостей 58а и 58b на дистальном участке 34 наконечника. Дистальный конец страховочной нити прикреплен к электроду 38 наконечника, в то время как проксимальный участок прикреплен к точке крепления внутри рукоятки 36 управления.
На Фиг.4 изображен покомпонентный вид дистального наконечника способного к изгибу катетера по настоящему изобретению. На Фиг.5 показан вид в перспективе электрода 438 наконечника. Электрод 438, изображенный на Фиг.4 и 5, представляет собой механически обработанный металлический электрод, состоящий из металла, проявляющего инертность в среде жидкости организма, например золота, платины, палладия или сплава этих металлов. Электрод 438 может быть также выполнен из основного металла, такого как медь, серебро, золото, алюминий, бериллий, бронза, палладий или сплавов этих металлов, на который затем наносится электролитическое покрытие, внутреннее и/или внешнее, из инертных металлов, таких как золото, платина, палладий или сплав этих металлов. Электрод 438 может включать в себя множество портов 439 для ирригации, соединенных с центральной полостью 440 для ирригации, однако такие порты и полости не являются обязательными. Проксимальный конец электрода 438 наконечника содержит основание 437, имеющее меньший диаметр, чем остальная часть электрода наконечника, и выполненное с возможностью сопряжения с соединительным звеном 442. Основание 437 может включать в себя множество зубцов 437а, которые способствуют закреплению электрода 438 наконечника в соединительном звене 442. Основание 437 электрода 438 наконечника крепится к соединительному звену 442 путем термоскрепления или ультразвуковой сварки. Купол 438а наконечника может быть механически обработан для обеспечения закругленного атравматического дистального наконечника с целью снижения повреждаемости ткани при размещении или использовании катетера. Полость 495 обеспечивает проход для страховочной нити 95, а полость 470 обеспечивает проход для выводного провода 70, который обеспечивает энергией электрод 438 наконечника. Выводной провод 70 присоединен к электроду 438 наконечника с использованием проводящего припоя или проводящей эпоксидной смолы.
Соединительное звено 442, полученное литьем под давлением и изображенное на Фиг.4 и 6, имеет дистальную секцию 443, внутренний диаметр которой на ее дистальном конце выполнен с возможностью приема основания 437 электрода 438 наконечника, а также имеет проксимальную секцию 441 с пазом 441а, выполненную с возможностью приема дистального конца 480 центральной распорки 80. Соединительное звено 442 изготовлено литьем под давлением из полимера медицинского назначения, такого как полиэфирэфиркетон (PEEK), сополимер акрилонитрила, бутадиена и стирола (ABS), поликарбонат, или другого подходящего материала, известного специалисту в данной области техники. Дистальный конец 480 центральной распорки 80 также включает в себя выемку 481, способную к зацеплению с защелкиванием, выполненную с возможностью фиксации на клине 441b, способном к зацеплению с защелкиванием, в соединительном звене 442, обеспечивая тем самым механизм для быстрой сборки дистальной секции способного к изгибу катетера, сам же способ его работы подробнее описан ниже. Отверстия 444а и 444b крепления тяговой нити представляют собой полости, выполненные с возможностью приема тяговых нитей 44а и 44b. Тяговые нити, приспособленные для такого использования, показаны на Фиг.7А. Тяговые нити 44а и 44b для использования в данном варианте осуществления предпочтительно выполнены из нити Вектран, на которой имеется шарик из эпоксидной смолы 444с, прикрепленный к ее дистальному концу. Нить Вектран должна пройти очистку с помощью спирта и/или ультразвуковой ванны перед прикладыванием шарика из эпоксидной смолы, который затем проходит обработку ультрафиолетом. Важно, чтобы эпоксидная смола была надежно зафиксирована на дистальном конце тяговых нитей 44а и 44b. По альтернативному варианту тяговая нить может быть выполнена из высокопрочной нержавеющей стали (304V), на одном конце которой образуют шарик с использованием технологии высокоскоростной лазерной плавки.
Вблизи дистального конца 480 центральной распорки 80 установлены один или несколько датчиков 490а-с деформации. Датчики деформации зафиксированы на присоединенной центральной распорке с определенной пространственной ориентацией. Изгибная деформация детектируется датчиком 490с деформации, зафиксированным в положении, параллельном продольной оси распорки. Деформация кручения детектируется двумя датчиками 490а и 490b деформации, расположенными под углом 90 градусов друг к другу и под углом сорок пять градусов относительно продольной оси распорки. Поскольку отслеживаются деформации присоединенной центральной распорки как при изгибе, так и при кручении, а распорка присоединена по своей продольной кромке по внутреннему диаметру удлиненного трубчатого элемента, можно определить силы, приложенные по внешнему диаметру наконечника катетера. Для повышения чувствительности, в месте расположения датчиков 490а и 490b деформации при кручении, на центральной распорке может быть выполнена шейка путем удаления участков 492 кромки центральной распорки 80, как изображено на Фиг.12. Таким же образом чувствительность при измерении изгибной деформации может быть увеличена путем прорезания одного или нескольких пазов 494 в центральной распорке 80. По альтернативному варианту можно использовать набор из двух датчиков деформации, размещенных на противоположных сторонах центральной распорки, причем один работает на сжатие, а другой - на растяжение. При таком расположении выход мостовой схемы для того же уровня деформации может быть эффективно удвоен. В схеме монтажа, при которой все плечи измерительного моста соединены с датчиками деформации, температурная компенсация осуществляется автоматически, поскольку изменения сопротивления, связанные с изменением температуры, будут одинаковыми для всех плеч моста.
На Фиг.13 изображен обычный датчик деформации для использования в настоящем изобретении. Предпочтительный датчик 490 деформации представляет собой прямоугольный монокристаллический или поликристаллический кремниевый элемент, установленный в направлении измеряемой деформации. Конструкция площадок 496 крепления выводного провода по обе стороны чувствительного элемента 498 имеет симметричную слабонапряженную геометрию для минимизации влияния остаточных напряжений на кремниевый брусок. Они могут представлять собой как традиционную контактную площадку для нанесения припоя, так и площадку для проводного соединения. Для проводного соединения обычно используется алюминиевая поверхность, а для пайки - золоченая никелевая поверхность. Будучи самыми крупными деталями устройства датчика деформации, эти площадки определяют размер устройства, и все устройство может быть сведено по размеру до долей квадратного миллиметра. Слабонапряженная полиамидная подложка повышенной надежности, схожая с каптоновой лентой, служит опорой всей конструкции, полная толщина которой обычно менее чем 1 миллиметр. Поскольку базовый элемент и конструкция площадки имеют толщину фольги, радиус изгиба всего датчика деформации составляет менее 0,06 дюйма.
Выводные провода предпочтительно содержат малогабаритный экранированный кабель, образованный тремя внутренними витыми парами токопроводящих жил с полинейлоновым покрытием двойной изоляции, соответствующих калибру №38-48 (медь) по системе AWG, которые закрыты экраном и, кроме того, имеют защитное покрытие из тефлона (FEP). Поскольку имеется минимум три датчика деформации, каждый из которых требует минимум два провода (три провода - для температурной компенсации фольгового датчика деформации), в данном варианте осуществления понадобится в общей сложности шесть проводов. Если применяется температурная компенсация в месторасположении датчика деформации, понадобится, по меньшей мере, еще два провода для обеспечения чувствительности к темпертуре с использованием термопары или термистора.
Центральная распорка 80 содержит прямоугольную секцию балки, таким образом, изгиб простой балки вдоль ее продольной оси определить нетрудно, но с добавлением изгиба при кручении центральной распорки образуется сложное напряженно-деформированное состояние, что является следствием наложения напряжений от различных силовых факторов, и изменения векторов сил, действующих на наконечник, делают эту задачу сложной. Деформация определяется как величина деформирования, отнесенная к единице длины объекта, при приложении нагрузки. Изгибная деформация (моментная деформация) рассчитывается путем определения соотношения между кривой изгиба наконечника и величиной изгиба, которая из этого следует. Деформация кручения измеряется тогда, когда скручивание наконечника катетера при боковом изгибе приводит к появлению компоненты деформации кручения. Деформация кручения рассчитывается путем деления напряжения при кручении на модуль упругости.
Тремя основными факторами, влияющими на выбор тензодатчика, являются рабочая температура, деформированное состояние (градиент, амплитуда и зависимость от времени), а также требуемая устойчивость системы. В идеале у тензодатчика изменяется сопротивление лишь благодаря деформированию звена центральной распорки, однако на измеряемое сопротивление оказывают влияние температура, свойства материала, клей, используемый для присоединения датчика к поверхности центральной распорки, и устойчивость звена распорки. Для восприятия изгибных характеристик центральной распорки могут использоваться два вида датчиков деформации (полупроводниковые и фольговые на основе металла), но полупроводниковые датчики предпочтительны. Полупроводниковые датчики обладают большей упругостью, чем датчики на основе металлической фольги, а потому имеют высокую предрасположенность возвращаться к форме своего недеформированного состояния. Калибровочный множитель полупроводниковых датчиков в пятьдесят раз, а чувствительность более чем в сто раз (30-120) превосходят соответствующие показатели датчиков на основе металлической фольги, у которых калибровочные множители и чувствительность существенно ниже. Полупроводниковые датчики поступают в упаковке значительно меньших размеров и по значительно меньшей цене, чем датчики на основе металлической фольги. Для полупроводниковых датчиков отношение сопротивления к деформации выражается нелинейной зависимостью, которая отклоняется от уравнения прямой на 10-20%, но этот факт известен заранее и поправка может вводиться математически. Выводные провода для датчиков деформации на основе полупроводников весьма малы и соединяются с датчиком с помощью проводящей эпоксидной смолы, проводного соединения, лазерной пайки/сварки или посредством ультразвука.
Поскольку звено центральной распорки присоединено по своей продольной кромке к наконечнику катетера в оплетке, калибровка датчика должна выполняться на каждом полуобработанном или обработанном катетере при рабочей температуре катетера (т.е. температуре тела). Переменные факторы производственного процесса, такие как изменения характеристик материала стержня катетера (модуля упругости и модуля упругости при кручении), изменение шага оплетки, диаметр оплетки и допуск на размер для материала наконечника, обусловливают эти требования. Данные по калибровке тензодатчиков для каждого катетера могут храниться в электрически стираемом перепрограммируемом ПЗУ (EEPROM) или ином накопителе в рукоятке катетера, так чтобы обеспечить легкий доступ к необходимой оперативной информации. Требуется в динамике осуществлять контроль и запись выходных сигналов тензодатчиков, силы растяжения тяговой нити катетера и местоположения наконечника при изгибе наконечника катетера на различные углы в процессе воздействия силовых векторов нагрузки на наконечник. Использование гибких материалов для наконечника катетера, таких как PEBAX или Arnitel (термопластический эластомер на основе сополиэфира), имеющих стабильный модуль постоянной величины при рабочих температурах катетера, повысит точность измерения контактной силы.
Единая тяговая нить 44, выполненная из неметаллических волокон такого материала как Вектран, может закрепляться на дистальном конце катетера путем продевания тяговой нити через одно или несколько крепежных отверстий 82а-е в центральной распорке 80, так чтобы противолежащие концы тяговой нити, 44а и 44b, располагались на противоположных сторонах центральной распорки, как изображено на Фиг.8. Такие крепежные отверстия 82а-е в центральной распорке 80 предпочтительно имеют диаметр 0,015 дюйма и разнесены на расстояние примерно 0,078 дюйма. Подобные крепежные отверстия можно расположить в центральной распорке 80 путем лазерной резки, пробивки или высверливания. В зависимости от числа отверстий на распорке, а также расположения тяговых нитей в одном или нескольких крепежных отверстиях 82а-е форма кривой будет изменяться, при этом предусматривается как симметричное, так и асимметричное конструктивное оформление кривой. Для образования симметричной кривой противолежащие концы тяговых нитей должны выходить из одного крепежного отверстия в направлении противоположных сторон распорки. Способ изменения формы кривой может осуществляться под контролем расстояния между крепежными отверстиями, используемыми для противолежащих концов тяговой нити. Когда концы каждой из тяговых нитей 44а и 44b закреплены с противоположных сторон центральной распорки 80, натягивание тяговой нити 44а или 44b в проксимальном направлении приведет к тому, что дистальный конец катетера 100 изогнется в плоскости в направлении той внеосевой полости, в которой проходит соответствующая тяговая нить.
В альтернативном варианте осуществления (не показан) используются две тяговые нити с металлическими обжимными кольцами или пластиковыми втулками для удерживания тяговых нитей в соответствующем им крепежном отверстии, расположенном на центральной распорке. Нить проходит через центральную распорку с одной стороны с использованием обжимного кольца как ограничителя, не позволяющего ее полностью вытянуть через крепежное отверстие. Дополнительный способ крепления тяговых нитей заключается в использовании пайки, сварки или клеящего вещества для их закрепления на центральной распорке.
По альтернативному варианту тяговые нити могут не крепиться к центральной распорке. Тяговая нить или тяговые нити могут крепиться к куполу наконечника или дистальному концу мягкой секции способного к изгибу наконечника катетера. На Фиг.9-11 показан ряд конструкций электродов 38 наконечника, выполненных с возможностью приема единой тяговой нити 44. Единая тяговая нить 44, соединенная с электродом 38 наконечника, обеспечивает управление в двух направлениях. Для достижения этого единая тяговая нить проведена через электрод купола, при этом противолежащие стороны тяговой нити располагаются на противоположных сторонах центральной распорки. Направление изгиба будет соответствовать пути наименьшего сопротивления. Кроме того, манипулирование каждой тяговой нитью по отдельности приведет к изгибу в плоскости в направлении той внеосевой полости, в которой проходит соответствующая тяговая нить. При таком варианте осуществления в явном виде оказывается поддержка конструктивным решениям с симметричной кривой.
На Фиг.10 и 11 изображены полые электроды 38 наконечника, выполненные с возможностью приема вставной втулки 45, которая садится с натягом в полый купол. Тяговая нить 44 проведена через вставную втулку. По такой схеме может крепиться одна или несколько тяговых нитей. Тяговая нить будет удерживаться на месте, как только вставную втулку должным образом поместят в электрод наконечника.
На Фиг.7B изображен другой вариант осуществления дистальной секции наконечника катетера 100, в котором тяговые нити крепятся к боковой стенке дистальной секции 34 наконечника катетера 100. Через внутренний слой 62, слой 64 оплетки и наружный слой 66 дистальной секции наконечника просверливают небольшое отверстие 71. После того как отверстие 71 просверлено, используют шлифовальный инструмент, чтобы слегка сгладить внешний контур вокруг отверстия, удалив материал примерно на длину 0,04,, и на глубину 0,013,,. К дистальному концу тяговой нити 44 прикрепляют брусок 72 тяговой нити, выполненный из нержавеющей стали, путем обжатия для создания обжимного кольца или путем использования иного средства соединения. При проведении тяговой нити 44 сквозь крепежное окно брусок будет располагаться на внешнем контуре термопластической мягкой секции способного к изгибу наконечника. Далее используют полиуретан для заливки бруска 72 тяговой нити, восстанавливая тем самым изначальный профиль дистальной секции 34 наконечника. Таким же образом каждая тяговая нить может быть закреплена на внешней периферии катетера 100 в произвольном месте вдоль продольной оси дистальной секции 34 наконечника. Таким же образом можно крепить несколько тяговых нитей, каждую на противоположной стороне центральной распорки. Изменение местоположения крепежных точек приводит к изменению контура изгиба катетера.
Проксимальный конец центральной распорки 80 продолжается с выходом из проксимального конца мягкого участка способного к изгибу наконечника. Проксимальный конец центральной распорки может быть выполнен на конус, так чтобы его можно было легко поместить в проксимальную секцию 32 катетера, что послужит дополнительной опорой области перехода. Рукав, предпочтительно выполненный из политетрафторэтилена (PTFE), может располагаться поверх конусного участка центральной распорки, удерживая тяговые нити и предотвращая тем самым их пересечение. Рукав выполнен в виде облегающего рукава, так что он плотно охватывает центральную распорку и нити, но не настолько плотно, чтобы помешать тяговым нитям свободно перемещаться в продольном направлении.
На Фиг.14 изображена схема измерительного контура 500 для использования с силоизмерительным катетером, имеющим датчики деформации на основе кремния. В измерительном контуре 500 используется сигма-дельта аналого-цифровой преобразователь (ADC) 502 с высокой разрешающей способностью, который включает в себя дифференциальные входы, встроенные программируемые усилители, автоматическую калибровку нуля, высокую степень подавления синфазного сигнала, а также цифровую фильтрацию шума, чтобы способствовать интеграции датчика деформации для точного измерения выходного напряжения мостовой схемы. Кремниевые датчики 490 деформации имеют высокий температурный коэффициент сопротивления (TCR)(чувствительность к температуре) по сравнению с константановой фольгой и фольгой из других металлов, а потому требуются схема компенсации температуры и алгоритмы программного обеспечения (таблицы температурных коэффициентов), как рассматривается ниже:
VOUT=VB×(S×S0×(1+S1×(T-Tr))+U0+U1×(T-Tr)) (1)
Уравнение (1) представляет формулу для вычисления детектируемой деформации, где VOUT-выходное напряжение моста, VB-напряжение возбуждения моста, S - приложенная деформация датчика, Tr - справочная температура, измеренная вблизи кремниевого тензодатчика, S0 - чувствительность датчика деформации при справочной температуре Tr, S1 - коэффициент температурной чувствительности (TCS), U0 - смещение нуля или небаланс моста при температуре Trпри отсутствии приложенной деформации, а U1 - температурный коэффициент смещения (OTC). Температурный коэффициент смещения представляет собой интервал ошибок, определяемый максимальным отклонением напряжения смещения при изменении температуры от 25ºС до любой другой температуры в заданном диапазоне. Коэффициент температурной чувствительности соответствует тангенсу угла наклона на графике зависимости чувствительности от температуры. Определение этого коэффициента имеет смысл лишь при наличии линейной или близкой к линейной зависимости между температурой и чувствительностью (единицы измерения: ppm/ºС). Полупроводниковые датчики деформации, которые будут использованы в данном приложении, обладают нелинейностью ±0,25% до 600u inch/inch и менее ±1,5% до 1500u inch/inch.
В уравнении (1) используются полиномы первого порядка для моделирования работы кремниевого датчика деформации. Для получения более высокой точности измерения могут быть также использованы полиномы более высоких порядков, линеаризация на дискретном интервале или аппроксимация второго порядка на дискретном интервале с использованием таблицы коэффициентов. Для цифровой калибровки требуется иметь возможность представить в цифровом виде VOUT, VB и T, а также определить все коэффициенты и выполнить необходимые вычисления с использованием микроконтроллера или компьютера для точного расчета величины деформации.
В схеме, показанной на Фиг.14, используется один аналого-цифровой преобразователь 502 с высокой разрешающей способностью для представления в цифровом виде VOUT, температуры вблизи кремниевого датчика деформации, а также VB (напряжения моста). Результаты этих измерений далее передаются на микропроцессор или компьютер 504 (которые располагаются либо в рукоятке катетера либо в системе для абляции или навигации, с которой соединен катетер), где осуществляется расчет деформации по уравнению (1). Микропроцессор или компьютер 504 могут представлять собой вычислительное устройство общего назначения любого вида, способное осуществить расчет путем выполнения объектной программы, которая содержится в устройстве с ассоциативной памятью. Питание мостовой схемы осуществляется непосредственно от того же источника питания (не показан), который питает как аналого-цифровой преобразователь, так и блок 506 опорного напряжения Vr. Резистивный температурный датчик или термопара, содержащая датчик 508 температуры, измеряет температуру вблизи кремниевого датчика деформации с целью обеспечения температурной компенсации. Датчик деформации может также содержать встроенный датчик температуры с целью обеспечения температурной компенсации. Входной мультиплексор на аналого-цифровом преобразователе 502 позволяет измерять множество напряжений моста кремниевого датчика деформации, используя один аналого-цифровой преобразователь. Для определения коэффициентов температурной калибровки катетер с внутренними кремниевыми датчиками деформации помещают в камеру с регулируемой температурой или водяную баню и производят замеры напряжения моста при ряде различных температур, при которых будет эксплуатироваться катетер, для определения коэффициентов температурной калибровки. Эти коэффициенты температурной калибровки затем хранятся в устройстве памяти, связанном с катетером, таком как электрически стираемое перепрограммируемое ПЗУ, в рукоятке 36 устройства с целью использования микропроцессором 504.
Для измерения статических деформаций используется мостовая схема 510 Витстоуна (Wheatstone) в силу ее особо высокой чувствительности. В идеале, датчик деформации является единственным резистором в схеме, который подвержен изменениям, и мост считается сбалансированным, когда R1/R2=Rg/R3, а потому VOUT равно нулю. Когда мост составлен так, что Rg является единственным активным датчиком деформации, малое изменение Rg незамедлительно выводит мост из равновесия, в результате чего появится выходное напряжение моста.
Для эффективной температурной компенсации в датчиках 90 деформации, выполненных на основе металлической фольги, с длинными выводными проводами, как в случае применения для измерения силы на наконечнике катетера, может использоваться трехпроводное соединение с датчиком деформации, как показано на Фиг.15. Половина сопротивления выводного провода (1/2RL) приходится на смежную сторону моста 510 Витстоуна для компенсации резистивных компонент этих двух проводов, на которые воздействует одинаковое изменение температуры, и, таким образом, мост не подвержен какому бы то ни было температурному влиянию со стороны длинных выводных проводов, которые проходят от схемы до местоположения датчика деформации на основе металлической фольги вблизи дистального наконечника катетера. Влиянием температуры от третьего выводного провода, соединенного с усилителем, можно пренебречь, поскольку усилитель обеспечивает соединение с высоким входным импедансом. При трехпроводной системе все провода должны быть выполнены из одного материала, иметь один калибр провода и одну длину с целью обеспечения соответствующей температурной компенсации. Температурное влияние на сопротивление датчика и на калибровочный множитель может не требовать компенсации, поскольку металлические сплавы, используемые для датчика, в своем большинстве имеют близкую к линейной температурную зависимость изменения калибровочного множителя в широком диапазоне температур, которое составляет менее ±1% в диапазоне температур ±100ºС. Каждый материал провода датчика деформации имеет собственные калибровочный множитель, сопротивление, температурный коэффициент калибровочного множителя, термический коэффициент сопротивления и устойчивость. Материалы, которые могут быть использованы в конструкции датчика деформации, включают в себя провода из константана, нихрома, платиновых сплавов, изоупругого сплава (сплава никель-железо) и сплава типа Карма (сплава никель-хром). Для того чтобы удвоить выход моста при одном и том же уровне деформации, целесообразно соединить датчики, размещенные на противоположных сторонах балки, один из которых работает на сжатие, а другой - на растяжение.
Аналого-цифровой преобразователь (ADC) 502 с высокой разрешающей способностью, который включает в себя дифференциальные входы, встроенные программируемые усилители, автоматическую калибровку нуля, высокую степень подавления синфазного сигнала, а также цифровую фильтрацию шума, чтобы способствовать интеграции датчика деформации, а также точному измерению выходного напряжения мостовой схемы. Выход аналого-цифрового преобразователя 502 сообщается с микропроцессором 504, который выполняет вышеизложенные вычисления для определения деформации.
В области упругости кривой «напряжение - деформация» напряжение линейно пропорционально деформации. Наконечник катетера эксплуатируется в области упругости, так что деформированное состояние наконечника не является постоянным, в противном случае это привело бы к тому, что тензодатчики могли не возвратиться к нулевой деформации, т.к. материал, к которому они присоединены, подвергся бы пластическому течению. Поскольку катетер эксплуатируется в области упругости кривой «напряжение - деформация», значение деформации прямо пропорционально напряжению и может быть преобразовано в напряженное состояние звена распорки в различных пространственных направлениях. Наконечник катетера находится под воздействием трех различных типов напряжений: напряжения, вызванного моментом изгиба, напряжения при кручении и сдвигового напряжения, которое может быть пренебрежимо мало по сравнению с двумя другими компонентами напряжения. Путем калибровки каждого катетера с использованием различных трехмерных векторов сил, действующих на наконечник, можно определить силы (в граммах), действующие на наконечник, на основе значений деформации, полученных каждым датчиком деформации, и на основе соответствующих пространственных расположений датчиков деформации относительно распорки.
Предшествующее описание представлено со ссылкой на существующие в настоящее время предпочтительные варианты осуществления изобретения. Специалисты в данной области техники и технологии, которых касается настоящее изобретение, поймут, что в описанной конструкции могут быть осуществлены изменения и преобразования без значительного отхода от принципа, сущности и объема изобретения.
Соответственно предшествующее описание не следует понимать как имеющее отношение лишь строго к тем конструкциям, которые описаны и изображены на прилагаемых чертежах, но его следует скорее понимать как согласующееся и дающее аргументы в пользу следующих пунктов формулы изобретения, которые должны быть представлены в самом полном и объективном объеме.
Реферат
Группа изобретений относится к медицине. Силоизмерительный катетер содержит удлиненный трубчатый элемент, имеющий полость, электрод наконечника, размещенный на дистальном конце трубчатого элемента, и центральную распорку, продолжающуюся вблизи от проксимального конца электрода наконечника через способный к изгибу дистальный участок удлиненного трубчатого элемента. Центральная распорка имеет первую продольную кромку и вторую продольную кромку и присоединена к удлиненному трубчатому элементу по всей длине первой продольной кромки и второй продольной кромки для образования неразъемной сборной конструкции из центральной распорки и удлиненного трубчатого элемента. Датчик деформации закреплен на центральной распорке для измерения силы вблизи дистального конца трубчатого элемента. Раскрыт альтернативный вариант выполнения силоизмерительного катетера, отличающийся средствами установки электрода и центральной распорки. Изобретения обеспечивают снижение вероятности перфорации тканей на пути продвижения катетера. 2 н. и 34 з.п.ф-лы, 15 ил.
Формула
удлиненный трубчатый элемент, имеющий проксимальный конец и дистальный конец, а также имеющий первую полость, расположенную в нем;
электрод наконечника, размещенный на дистальном конце трубчатого элемента;
центральную распорку, продолжающуюся вблизи от проксимального конца электрода наконечника через способный к изгибу дистальный участок удлиненного трубчатого элемента, которая имеет первую продольную кромку и вторую продольную кромку;
при этом центральная распорка присоединена к удлиненному трубчатому элементу по существу по всей длине первой продольной кромки и второй продольной кромки для образования неразъемной сборной конструкции из центральной распорки и удлиненного трубчатого элемента; и
по меньшей мере, один датчик деформации, закрепленный на центральной распорке для измерения силы вблизи дистального конца трубчатого элемента.
VOUT=VB×(S×S0×(1+S1×(T-Tr))+U0+U1×(T-Tr)),
где VOUT - выходное напряжение моста, VB - напряжение возбуждения моста, S - приложенная деформация датчика, Tr - справочная температура, измеренная вблизи кремниевого тензодатчика, S0 - чувствительность датчика деформации при справочной температуре Tr, S1 - коэффициент температурной чувствительности (TCS), U0 - смещение нуля или небаланс моста при температуре Tr при отсутствии приложенной деформации, a U1 - температурный коэффициент смещения (ОТС).
удлиненный трубчатый элемент, имеющий проксимальный конец и дистальный конец, а также имеющий первую полость, расположенную в нем;
электрод наконечника, размещенный на дистальном конце трубчатого элемента;
центральную распорку, продолжающуюся вблизи от проксимального конца электрода наконечника через способный к изгибу дистальный участок удлиненного трубчатого элемента, которая имеет первую продольную кромку и вторую продольную кромку;
отформованное соединительное звено, имеющее дистальный участок, выполненный с возможностью приема участка проксимального конца электрода наконечника, и имеющее проксимальный участок, имеющий, по меньшей мере, один паз, выполненный с возможностью приема, по меньшей мере, одной из первой или второй продольных кромок центральной распорки;
при этом центральная распорка присоединена к удлиненному трубчатому элементу по существу по всей длине первой продольной кромки и второй продольной кромки для образования неразъемной сборной конструкции из центральной распорки и удлиненного трубчатого элемента; а также
по меньшей мере, один датчик деформации, закрепленный на центральной распорке для измерения силы вблизи дистального конца трубчатого элемента.
Комментарии