Система подвески транспортного средства - RU2395407C2
Код документа: RU2395407C2
Чертежи
















Описание
Область техники
Настоящее изобретение относится в основном к системе подвески, которая подлежит установке в транспортном средстве, а более конкретно - к такой системе подвески, оснащенной электромагнитным исполнительным механизмом, которая функционирует как амортизатор.
Уровень техники
В области автомобильной промышленности последних лет ведется разработка системы, описанной в документе JP20020-311452А, т.е. так называемой системы электромагнитной подвески (сокращенно именуемой далее «электромагнитной подвеской», где это уместно), в которой электромагнитный исполнительный механизм выполнен с возможностью функционирования в качестве амортизатора (демпфера). Ожидается, что эта электромагнитная подвеска станет высокоэффективной системой подвески благодаря своим преимуществам, таким как возможность простым способом устанавливать характеристику подвески на основании теории так называемого небесного крюка.
Краткое описание изобретения
В электромагнитной подвеске, описанной в вышеуказанном патентном документе, управление подвеской осуществляется с избирательным установлением двух состояний. Когда устанавливается одно из этих двух состояний, электрическая мощность подается из аккумуляторной батареи в электрический двигатель, входящий в состав электромагнитного исполнительного механизма, вследствие чего генерируется сила исполнительного механизма. Когда устанавливается другое состояние, электрическая мощность, генерируемая электрическим двигателем, возвращается в аккумуляторную батарею, вследствие чего восстанавливается сила исполнительного механизма. Вместе с тем, в зависимости от состояния зарядки аккумуляторной батареи, может возникнуть ситуация, в которой электрическая мощность не должна подаваться из аккумуляторной батареи, или ситуации, в которой электрическая мощность не должна возвращаться в аккумуляторную батарею. Кроме того, возможна ситуация, требующая разрядки электрической энергии, накопленной в аккумуляторной батарее, чтобы таким образом избежать состояния избыточной зарядки, например, когда аккумуляторная батарея уже находится в полностью заряженном состоянии. Следовательно, надлежащие действия в таких ситуациях приводят к улучшению использования электромагнитной подвески. Настоящее изобретение было сделано в свете вышеизложенного состояния уровня техники. Поэтому задача изобретения состоит в том, чтобы разработать систему подвески транспортного средства, обладающую высокой работоспособностью в процессе практического использования.
Эту задачу можно решить в соответствии с принципом этого изобретения, в котором предлагается система электромагнитной подвески в качестве системы подвески транспортного средства, способной устанавливать состояние (состояние генерирования постоянной силы), которое вызывает генерирование электромагнитным исполнительным механизмом постоянной силы исполнительного механизма с подачей в него электрической мощности из аккумуляторной батареи таким образом, что управление состоянием генерирования постоянной силы осуществляется в зависимости от состояния зарядки аккумуляторной батареи.
Состояние генерирования постоянной силы - это состояние, в котором исполнительный механизм поддерживает генерирование силы, которая может изменить расстояние между колесом и кузовом транспортного средства. За счет управления состоянием генерирования постоянной силы создается возможность эффективного управления разрядкой аккумуляторной батареи. Такой технический эффект гарантирует, что система подвески в соответствии с настоящим изобретением будет обладать высокой работоспособностью в процессе практического использования.
Варианты изобретения
Ниже будут описаны различные варианты изобретения (именуемого далее «заявляемым изобретением», где это уместно), которые предполагаются включающими в себя заявляемые признаки, защита которых испрашивается. Каждый из этих вариантов изобретения пронумерован аналогично пунктам прилагаемой формулы изобретения и зависит от другого варианта или других вариантов, где это уместно, для облегчения понимания технических признаков, раскрытых в данном описании. Следует понять, что заявляемое изобретение не ограничивается техническими признаками или любой их комбинацией, которая может быть описана в каждой из этих вариантов. То есть, объем притязаний заявляемого изобретения следует интерпретировать в свете нижеследующего описания, сопровождающего различные варианты и предпочтительные варианты осуществления изобретения. В крайнем случае, соответствующем такой интерпретации, вариант заявляемого изобретения может быть образован не только любым из этих вариантов, но и либо вариантом, обеспечиваемым любым из этих вариантов, и дополнительным элементом или дополнительными элементами, входящим или входящими в его состав, либо вариантом, обеспечиваемым любым из этих вариантов без некоторых элементов, входящих в его состав. Отметим, что описываемые ниже варианты (1)-(21) соответствуют пп.1-21 прилагаемой формулы изобретения, соответственно.
(1) Система подвески для транспортного средства включает в себя:
подвесную пружину, упруго взаимодействующую с кузовом транспортного средства и колесом транспортного средства,
исполнительный механизм, расположенный параллельно подвесной пружине и имеющий электрический двигатель, так что этот исполнительный механизм выполнен с возможностью генерирования на основании силы электрического двигателя силу исполнительного механизма, вынуждающее сближение кузова транспортного средства и колеса друг с другом и их отдаление друг от друга, а также с возможностью вызова действия силы исполнительного механизма в качестве демпфирующей силы, противодействующей сближению кузова транспортного средства и колеса друг с другом и отдалению их друг от друга, и
управляющее устройство, конфигурация которого обеспечивает управление силой исполнительного механизма, генерируемой исполнительным механизмом, посредством операции управления электрическим двигателем,
причем управляющее устройство выполнено с возможностью установки состояния генерирования постоянной силы, в котором сила исполнительного механизма постоянно генерируется в качестве постоянной силы исполнительного механизма исполнительным механизмом с подачей электрической мощности в него из аккумуляторной батареи в качестве источника электрической мощности электрического двигателя таким образом, что генерируемая постоянная сила исполнительного механизма действует в одном из направления принудительного отдаления кузова транспортного средства и колеса друг от друга и направления принудительного сближения кузова транспортного средства и колеса друг с другом,
при этом конфигурация управляющего устройства обеспечивает управление состоянием генерирования постоянной силы на основании состояния зарядки аккумуляторной батареи.
Состояние генерирования постоянной силы, охарактеризованное в этом варианте (1), - это состояние, в котором исполнительный механизм вынужден генерировать силу, вынуждающую сближение кузова транспортного средства и колеса друг с другом и их отдаление друг от друга. В этом состоянии генерирования постоянной силы, постоянная сила исполнительного механизма служит, например, в качестве силы, увеличивающей или уменьшающей высоту транспортного средства, или силы, ограничивающей наклон кузова автомобиля вперед, назад, вправо и влево таким образом, что поддерживается излучение электрической энергии заряда, имеющейся в аккумуляторной батарее, в электрический двигатель, входящий в состав исполнительного механизма. Таким образом, в этом варианте возможно эффективное управление разрядкой аккумуляторной батареи за счет управления состоянием генерирования постоянной силы в зависимости от состояния зарядки аккумуляторной батареи. Например, когда уровень зарядки аккумуляторной батареи является высоким (что далее именуется «состоянием высокого уровня зарядки», где это уместно), в частности, когда аккумуляторная батарея полностью заряжена (что далее именуется «полностью заряженным состоянием», где это уместно), или когда аккумуляторная батарея находится почти в полностью заряженном состоянии, установление состояния генерирования постоянной силы позволяет эффективно избежать перехода аккумуляторной батареи в состояние (именуемое далее «избыточно заряженным состоянием», где это уместно), в котором аккумуляторная батарея продолжает дополнительно заряжаться до большего уровня, чем в полностью заряженном состоянии. С другой стороны, когда уровень зарядки аккумуляторной батареи является низким (что далее именуется «состоянием низкого уровня зарядки», где это уместно), в частности, когда в аккумуляторной батарее, по существу, не остается электрической энергии, которая излучается (что именуется далее «недостаточно заряженным состоянием», где это уместно), или когда аккумуляторная батарея находится почти в недостаточно заряженном состоянии, запрет установления состояния генерирования постоянной силы позволяет ограничить потребление электрической мощности, остающейся в аккумуляторной батарее, и эффективно избежать перехода батареи в состояние (именуемое далее «избыточно разряженным состоянием», где это уместно), в котором аккумуляторная батарея продолжает дополнительно разряжаться до большего уровня, чем в недостаточно заряженном состоянии.
«Постоянная сила исполнительного механизма», охарактеризованная в этом варианте, может быть либо силой, вынуждающей отдаление кузова транспортного средства и колеса в направлении (именуемом далее «направлением отскока», где это уместно) друг от друга, либо силой, вынуждающей сближение кузова транспортного средства и колеса в направлении (именуемом далее «направлением подскока», где это уместно) друг к другу. Если система оснащена множеством исполнительных механизмов, состояние генерирования постоянной силы может быть либо состоянием, в котором постоянные силы исполнительных механизмов, генерируемые соответствующими исполнительными механизмами, действуют в одном и том же направлении, либо состоянием, в котором постоянные силы исполнительных механизмов, генерируемые соответствующими исполнительными механизмами, действуют в соответствующих разных направлениях. Кроме того, в состоянии генерирования постоянной силы, постоянная сила исполнительного механизма, генерируемая этим исполнительным механизмом, может действовать либо только в одном из направлений отскока и подскока, либо в изменяющемся направлении, которое изменяется с одного из направлений отскока и подскока на другое во время установления состояния генерирования постоянной силы. То есть, в состоянии генерирования постоянной силы, направление постоянной силы исполнительного механизма, генерируемой этим исполнительным механизмом, может быть либо неизменным, либо изменяющимся. Более того, в состоянии генерирования постоянной силы, величина постоянной силы исполнительного механизма может быть либо неизменной, либо изменяющейся. Кроме того, термин «управление состоянием генерирования постоянной силы» охватывает, например, определение того, следует ли установить состояние генерирования постоянной силы, и определение того, когда следует установить состояние генерирования постоянной силы. Когда состояние генерирования постоянной силы установлено, термин «управление состоянием генерирования постоянной силы» охватывает, например, определение величины и направления постоянной силы исполнительного механизма.
Данный вариант применим к транспортному средству, которое выполнено так, что вышеупомянутая аккумуляторная батарея запитывается источником питания, служащим исключительно для исполнительного механизма, вследствие чего электрическая энергия, генерируемая электрическим двигателем, входящим в состав исполнительного механизма, запасается в аккумуляторной батарее, или - в альтернативном варианте - применим к транспортному средству, которое выполнено так, что вышеупомянутая аккумуляторная батарея запитывается источником питания, служащим также для другой системы, а именно, используется также в качестве источника питания двигателя привода, например, для системы гибридного привода, вследствие чего электрическая энергия, генерируемая другой системой, запасается в аккумуляторной батарее. В последнем случае, система подвески согласно этому варианту может быть выполнена с возможностью эффективного предотвращения избыточной зарядки аккумуляторной батареи из-за возврата генерируемой энергии из другой системы. Отметим, что «электрический двигатель» может быть либо вращающимся электродвигателем, либо линейным электродвигателем.
(2) В системе подвески согласно варианту (1) подвесная пружина и исполнительный механизм расположены в каждом из четырех колес, таких как передние правое и левое и задние правое и левое колеса транспортного средства, так что в соответствующих четырех колесах расположены четыре исполнительных механизма для генерирования соответствующих постоянных сил исполнительных механизмов,
при этом управляющее устройство выполнено с возможностью установления состояния, такого как состояние генерирования постоянной силы, в котором упомянутые четыре исполнительных механизма предназначены для генерирования соответствующих сил, которые действуют в одном и том же направлении, в качестве соответствующих постоянных сил исполнительных механизмов.
(3) В системе подвески согласно варианту (1) или (2) подвесная пружина и исполнительный механизм расположены в каждом из четырех колес, таких как передние правое и левое и задние правое и левое колеса транспортного средства, так что в соответствующих четырех колесах расположены четыре исполнительных механизма для генерирования соответствующих постоянных сил исполнительных механизмов,
при этом управляющее устройство выполнено с возможностью установления состояния, такого как состояние генерирования постоянной силы, в котором два из четырех исполнительных механизмов, находящихся в соответствующих положениях, которые расположены по диагонали друг к другу, предназначены для генерирования соответствующих сил, которые действуют в направлении, обеспечивающем принудительное отдаление кузова транспортного средства и колеса друг от друга, в качестве соответствующих постоянных сил исполнительных механизмов, а другие два из четырех исполнительных механизмов предназначены для генерирования соответствующих сил, которые действуют в направлении, обеспечивающем принудительное сближение кузова транспортного средства и колеса друг с другом, в качестве соответствующих постоянных сил исполнительных механизмов.
В вышеописанных двух вариантах, в которых четыре исполнительных механизма расположены в соответствующих четырех колесах, таких как передние правое и левое и задние правое и левое колеса, существует ограничение, накладываемое на направление постоянной силы исполнительного механизма, генерируемого каждым из исполнительных механизмов, в течение состояния генерирования постоянной силы. В первом из двух вариантов, постоянные силы исполнительных механизмов из числа постоянных сил четырех исполнительных механизмов вынуждают подъем или опускание кузова транспортного средства. То есть, в первом варианте аккумуляторная батарея разряжается с генерированием силы, взывающей изменение высоты транспортного средства. С другой стороны, в последнем из этих двух вариантов, постоянные силы исполнительных механизмов представляют собой силы, вынуждающие наклон участка стороны передних колес и участка стороны задних колес кузова транспортного средства в соответствующих противоположных направлениях. То есть, в последнем варианте аккумуляторная батарея разряжается с генерированием силы, вызывающей кручение кузова транспортного средства. Поскольку кузов транспортного средства обладает относительно большой жесткостью, деформацию кузова транспортного средства из-за крутящей силы можно игнорировать. В последнем варианте, аккумуляторная батарея разряжается без существенного генерирования силы, вызывающей изменение высоты транспортного средства.
(4) В системе подвески согласно варианту (3) конфигурация управляющего устройства обеспечивает управление постоянными силами исполнительных механизмов, генерируемыми четырьмя исполнительными механизмами, таким образом, что назначение двух из четырех исполнительных механизмов и назначение других двух из четырех исполнительных механизмов периодически переключаются с одного назначения на другое, вследствие чего направление постоянной силы исполнительного механизма, генерируемого каждым из четырех исполнительных механизмов, изменяется при периодическом переключении упомянутого назначения.
В данном варианте, постоянные силы исполнительных механизмов, генерируемые вышеописанными двумя исполнительными механизмами, находящимися в соответствующих положениях по диагонали друг к другу, действуют в направлении, которое периодически переключается между направлением подскока и направлением отскока, тогда как постоянные силы исполнительных механизмов, генерируемые вышеописанными двумя другими исполнительными механизмами, действуют в направлении, которое противоположно направлению действия постоянных сил исполнительных механизмов, генерируемых двумя исполнительными механизмами. Короче говоря, в данном варианте крутящая сила, вызывающая кручение кузова транспортного средства, действует в направлении, которое периодически изменяется.
Если состояние генерирования постоянной силы устанавливается крутящей силой, прикладываемой к кузову транспортного средства в определенном направлении, и это состояние генерирования постоянной силы поддерживается в течение относительно длительного периода времени, то крутящая сила прикладывается к кузову транспортного средства в определенном направлении на протяжении длительного периода времени, тем самым вызывая риск негативного воздействия влияния, оказываемого, например, на раму транспортного средства. В данном варианте возможно периодическое изменение направления, в котором к кузову транспортного средства прикладывается крутящая сила, с одновременным установлением состояния генерирования постоянной силы, что позволяет уменьшить влияние, действующее на раму кузова транспортного средства даже тогда, когда состояние генерирования постоянной силы поддерживается в течение относительно длительного периода времени.
Кроме того, если к кузову транспортного средства прикладывается крутящая сила, то можно считать, что деформация кузова транспортного средства этой крутящей силой не является существенной, поскольку жесткость кузова транспортного средства относительно велика. То есть, во время приложения крутящей силы к кузову транспортного средства можно считать, что электрический двигатель генерирует силу, будучи остановленным, по существу, в том же рабочем положении. Если электрический двигатель поддерживается в таком состоянии в течение относительно длительного периода времени, то электрический двигатель, по существу, не перемещается из определенного положения электрического угла, вследствие чего определенная фазная обмотка запитывается электрическим током большей величины. Это вызывает риск негативного влияния, действующего на электрический двигатель. Вместе с тем, поскольку жесткость кузова транспортного средства не является бесконечно большой, существует вероятность, что электрический двигатель сможет немного переместиться за счет изменения направления, в котором крутящая сила прикладывается к кузову транспортного средства, причем это изменение может вызывать небольшую деформацию кузова транспортного средства. В данном варианте возможно уменьшение воздействия, оказываемого на раму кузова транспортного средства, даже тогда, когда состояние генерирования постоянной силы поддерживается в течение относительно длительного периода времени.
(5) В системе подвески согласно варианту (4) конфигурация управляющего устройства обеспечивает управление постоянными силами исполнительных механизмов, генерируемыми четырьмя исполнительными механизмами, таким образом, что постоянные силы исполнительных механизмов, генерируемые четырьмя исполнительными механизмами, постепенно изменяются, когда направление постоянной силы исполнительного механизма, генерируемого каждым из четырех исполнительных механизмов, изменяется при периодическом переключении упомянутого назначения.
Если направление крутящей силы, прикладываемой к кузову транспортного средства, изменяется резко, то существует риск, например, того, что по кузову транспортного средства может быть нанесен удар. Например, в данном варианте возможно смягчение воздействия, которое оказывается на кузов транспортного средства и которое обусловлено изменением направления крутящей силы
(6) В системе подвески согласно любому из вариантов (3)-(5) конфигурация управляющего устройства всегда обеспечивает уравнивание друг с другом величин постоянных сил исполнительных механизмов, генерируемых четырьмя исполнительными механизмами.
В данном варианте осуществления, разрядку аккумуляторной батареи можно осуществлять, например, по существу, без наклона кузова транспортного средства и без изменения высоты транспортного средства.
(7) В системе подвески согласно любому из вариантов (1)-(6) подвесная пружина является винтовой пружиной.
(8) В системе подвески согласно любому из вариантов (1)-(6) подвесная пружина является пружиной с текучей средой и использует давление текучей среды.
В каждом из вышеописанных вариантов существует особое ограничение, накладываемое на конструкцию подвесной пружины. «Пружину с текучей средой» можно обеспечить посредством любой из различных пружин, таких как диафрагменная пневмобаллонная пружина, которая включает в себя напорную камеру, наполненную сжатым воздухом, и пружина гидравлического типа, которая включает в себя цилиндр, наполненный рабочим маслом, и аккумулятор, поддерживаемый сообщающимся с цилиндром. Кроме того, «пружина с текучей средой» может быть обеспечена пружиной, жесткость которой является изменяемой. Жесткость пружины можно интерпретировать как означающую не только так называемую постоянную пружины, представляющую собой отношение нагрузки, действующей на подвесную пружину, к величине перемещения подвесной пружины, но и как отношение нагрузки, действующей на подвесную пружину, к расстоянию (именуемому далее расстоянием «колесо-кузов», где это уместно) между колесом и кузовом транспортного средства, которые упруго соединены посредством подвесной пружины. То есть, в случае генерирования постоянной силы исполнительного механизма в форме силы, предназначенной для изменения высоты транспортного средства в течение состояния генерирования постоянной силы, высота транспортного средства изменяется, вообще говоря, под действием постоянной силы исполнительного механизма, в котором пружина является винтовой пружиной. Вместе с тем, когда применяется пружина с текучей средой, имеющая жесткость, являющуюся изменяемой, изменение высоты транспортного средства можно исключить путем изменения жесткости пружины.
(9) В системе подвески согласно любому из вариантов (1)-(8) конфигурация управляющего устройства обеспечивает осуществление управления в состоянии высокого уровня зарядки для принудительного установления состояния генерирования постоянной силы, когда аккумуляторная батарея находится в состоянии высокого уровня зарядки.
В данном варианте, аккумуляторная батарея, которая находится в состоянии высокого уровня зарядки, эффективно разряжается за счет генерирования постоянной силы исполнительного механизма. Если описывать конкретно, то оказывается возможным применение компоновки, при наличии которой состояние генерирования постоянной силы устанавливается, когда уровень зарядки становится равным некоторому пороговому значению или превышает его (например, когда параметр, характеризующий состояние зарядки аккумуляторной батареи, становится равным этому пороговому значению или превышает его). В данном варианте, когда аккумуляторная батарея оказывается в состоянии высокого уровня зарядки, принудительно осуществляется разрядка аккумуляторной батареи, что позволяет предотвратить переход аккумуляторной батареи в избыточно заряженное состояние.
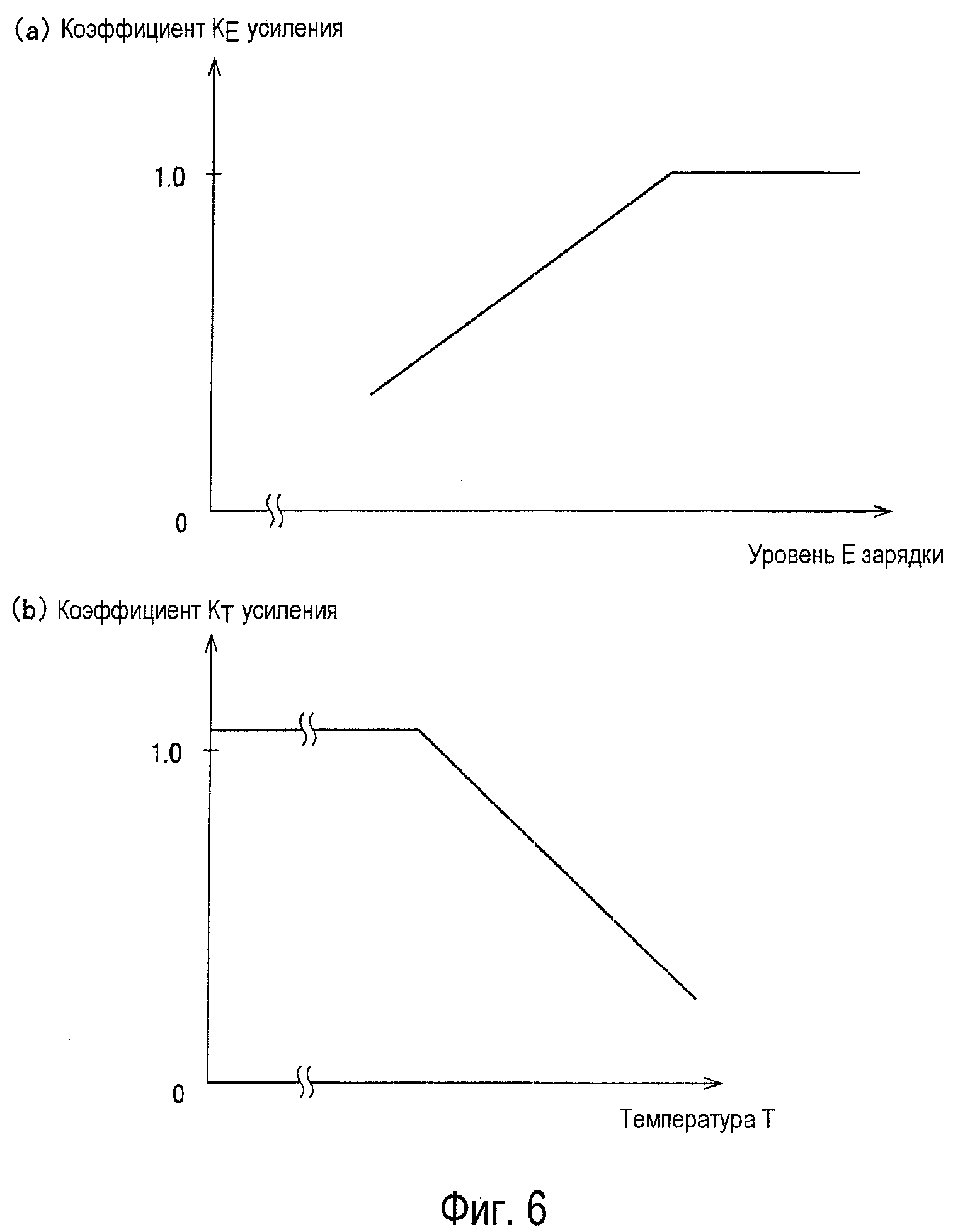
(10) В системе подвески согласно варианту (9) величина постоянной силы исполнительного механизма, генерируемого при осуществлении управления в состоянии высокого уровня зарядки, определяется на основании уровня зарядки аккумуляторной батареи.
(11) В системе подвески согласно варианту (9) или (10) величина постоянной силы исполнительного механизма, генерируемого при осуществлении управления в состоянии высокого уровня зарядки, определяется на основании температуры исполнительного механизма.
К каждом из вышеописанных двух вариантов существует ограничение, накладываемое на величину постоянной силы исполнительного механизма. Первый из этих двух вариантов соответствует варианту, в котором постоянная сила исполнительного механизма генерируется с большей величиной, когда уровень зарядки аккумуляторной батареи выше, а именно, когда уровень зарядки аккумуляторной батареи ближе к состоянию высокого уровня зарядки. В соответствии с этим вариантом, возможно излучение электрической энергии большей величины из аккумуляторной батареи, когда уровень зарядки аккумуляторной батареи выше. Последний из этих двух вариантов соответствует варианту, в котором постоянная сила исполнительного механизма генерируется с меньшей величиной, когда температура исполнительного механизма выше. При большем количестве подаваемой в него электрической энергии, электрический двигатель, входящий в состав исполнительного механизма, генерирует силу исполнительного механизма с большей величиной, а генерирование силы исполнительного механизма большей величины приводит к генерированию большего количества тепла. Поскольку электрический двигатель может оказаться поврежденным, когда находится в перегретом состоянии, можно эффективно защитить исполнительный механизм, уменьшая величину генерируемой постоянной силы исполнительного механизма, когда температура исполнительного механизма является высокой.
(12) В системе подвески согласно любому из вариантов (9)-(11) электрическая мощность, генерируемая электрическим двигателем при срабатывании исполнительного механизма, обуславливаемом внешней силой, возвращается в аккумуляторную батарею, и возврат электрической мощности в аккумуляторную батарею ограничивается, когда аккумуляторная батарея находится в состоянии высокого уровня зарядки.
Вышеописанное управление в состоянии высокого уровня зарядки можно рассматривать как управление, осуществляемое с целью облегчения разрядки аккумуляторной батареи, когда аккумуляторная батарея находится в состоянии высокого уровня разрядки. Ввиду этой цели управления в состоянии высокого уровня зарядки, предпочтительным является наложение ограничения на возврат электрической мощности (генерируемой электрическим двигателем, входящим в состав исполнительного механизма) в аккумуляторную батарею при осуществлении управления в состоянии высокого уровня зарядки, как в данном варианте. В общем случае, система подвески находится в одном из двух состояний, которое зависит от соотношения между рабочей скоростью электрического двигателя и величиной силы исполнительного механизма (причем это соотношение свойственно электрическому двигателю и исполнительному механизму). В одном из двух состояний (именуемом далее «состоянием генерирования силы исполнительного механизма на основании подаваемой электрической мощности», где это уместно), электрический двигатель генерирует силу исполнительного механизма на основании электрической мощности, подаваемой в него из аккумуляторной батареи. В другом из двух состояний (именуемом далее «состоянием генерирования силы исполнительного механизма на основании генерируемой электрической мощности», где это уместно), электрический двигатель генерирует силу исполнительного механизма, генерируя при этом электрическую мощность. В данном варианте, например, когда система подвески находится в состоянии генерирования силы исполнительного механизма на основании генерируемой электрической мощности, возврат электрической мощности, генерируемой электрическим двигателем, в аккумуляторную батарею запрещается путем отсоединения электрического двигателя и аккумуляторной батареи друг от друга. Кроме того, в этом случае величину силы исполнительного механизма можно адаптировать с достижением желательного значения в состоянии генерирования силы исполнительного механизма на основании генерируемой электрической мощности путем управления значением сопротивления резистора, который расположен между входными клеммами электрического двигателя. Следует отметить, что данный вариант охватывает не только вариант, в котором возврат электрической мощности в аккумуляторную батарею полностью запрещен, но и вариант, в котором этот возврат ограничен, например, путем запрета возврата, когда электрическая мощность генерируется в большом количестве, или путем уменьшения величины возвращаемой электрической мощности при вмешательстве резистора или аналогичного средства.
(13) В системе подвески согласно любому из вариантов (9)-(12) управление в состоянии высокого уровня зарядки является управлением, которое обуславливает действие генерируемой постоянной силы исполнительного механизма в направлении, которое определяется на основании, по меньшей мере, одного фактора из состояния дорожного покрытия, по которому движется транспортное средство, и скорости движения, с которой движется транспортное средство.
Данный вариант считается вариантом, эффективным в частности, в качестве варианта, в котором расстояние «колесо-кузов» изменяется, например, постоянной силой исполнительного механизма. Например, если транспортное средство едет по дороге, находящейся в плохом состоянии, такой как дорога с колдобинами, желательно, чтобы постоянная сила исполнительного механизма генерировалась действующей в направлении отскока, чтобы увеличить расстояние «колесо-кузов», а именно, чтобы увеличить высоту транспортного средства. Кроме того, например, когда транспортное средство движется с относительно большой скоростью, желательно, чтобы постоянная сила исполнительного механизма генерировалась действующей в направлении подскока, чтобы уменьшить расстояние «колесо-кузов», а именно, чтобы уменьшить высоту транспортного средства, имея в виду устойчивость движущегося транспортного средства. Данный вариант включает в себя вариант, в котором направление постоянной силы исполнительного механизма определяется в зависимости от состояния дорожного покрытия и скорости движения, чтобы удовлетворить вышеуказанные требования.
(14) В системе подвески согласно любому из вариантов (9)-(13) конфигурация управляющего устройства обеспечивает постепенное изменение постоянной силы исполнительного механизма при переходе от управления в нормальном состоянии к управлению в состоянии высокого уровня зарядки и при переходе от управления в состоянии высокого уровня зарядки к управлению в нормальном состоянии.
Если сила исполнительного механизма резко изменяется при переходе между состоянием генерирования постоянной силы и состоянием, отличающемся от состояния генерирования постоянной силы, это резкое изменение увеличивает вероятность того, что пассажиры будут испытывать дискомфорт. В данном варианте можно исключить или смягчить влияние резкого изменения постоянной силы исполнительного механизма. Постоянную силу исполнительного механизма можно постепенно изменять особым образом, на который ограничения не накладываются. Например, в случае, если управление исполнительным механизмом обеспечивает генерирование целевой постоянной силы исполнительного механизма, которая предварительно определена, когда разность между фактически генерируемой постоянной силой исполнительного механизма и целевой постоянной силой исполнительного механизма не меньше, чем заданное пороговое значение, постоянную силу исполнительного механизма можно постепенно изменять с помощью исполнительного механизма, управление которым обеспечивает генерирование временно действующей целевой постоянной силы исполнительного механизма, которая вычисляется путем прибавления заданной величины к фактически генерируемой постоянной силе исполнительного механизма или вычитания этой величины из упомянутой силы, причем задана величина предварительно определена так, что оператор транспортного средства не замечает изменения силы исполнительного механизма на эту заданную величину.
Следует отметить, что технический признак постепенного изменения постоянной силы исполнительного механизма применим не только к стадии перехода между управлением в состоянии высокого уровня зарядки и управлением в нормальном состоянии, но и к различным стадиям, на которых происходит резкое изменение силы исполнительного механизма. То есть, вариантом заявляемого изобретения может быть вариант, в котором данный технический признак используется на различных стадиях.
(15) В системе подвески согласно любому из вариантов (9)-(14) подвесная пружина имеет конструкцию, допускающую изменение жестокости пружины,
при этом управляющее устройство имеет конфигурацию, обеспечивающую изменение жесткости пружины, присущей подвесной пружине, с тем, чтобы ограничить изменение расстояния между кузовом транспортного средства и колесом под действием постоянной силы исполнительного механизма.
Данный вариант эффективен для системы, оснащенной вышеописанной пружиной с текучей средой, такой как пневматическая пружина. Этот вариант позволяет эффективно исключать или уменьшать изменение высоты транспортного средства, т.е. изменение расстояния «колесо-кузов», путем изменения жесткости пружины, когда расстояние «колесо-кузов» изменяется постоянной силой исполнительного механизма. Управление изменением жесткости пружины согласно данному варианту предпочтительно, например, на вышеописанной стадии перехода между разными управлениями.
(16) В системе подвески согласно варианту (15) скорость изменения постоянной силы исполнительного механизма при увеличении постоянной силы исполнительного механизма больше, чем скорость изменения постоянной силы исполнительного механизма при уменьшении постоянной силы исполнительного механизма, когда постоянная сила исполнительного механизма изменяется, а изменение расстояния между кузовом транспортного средства и колесом ограничено изменением жесткости пружины, присущей подвесной пружине.
В случае пружины с текучей средой, такой как пневматическая пружина, в общем случае для увеличения расстояния «колесо-кузов», которое осуществляется путем увеличения количества текучей среды, требуется больший период времени, чем для уменьшения расстояния «колесо-кузов», которое осуществляется путем уменьшения количества текучей среды. В данном варианте, скорость изменения постоянной силы исполнительного механизма изменяется с учетом такой общей тенденции. В соответствии с данным вариантом, появляется возможность эффективно ограничивать изменение расстояния «колесо-кузов», обуславливаемое постоянной силой исполнительного механизма.
(17) В системе подвески согласно любому из вариантов (9)-(16) управляющее устройство имеет конфигурацию, обеспечивающую ограничение осуществления управления в состоянии высокого уровня зарядки, когда температура исполнительного механизма является высокой.
Как описано выше, в состоянии генерирования постоянной силы электрический двигатель, входящий в состав исполнительного механизма, генерирует большое количество тепла, вследствие чего существует высокая вероятность, что электрический двигатель может подвергнуться негативному влиянию этого большого количества тепла. В данном варианте, это негативное влияние можно эффективно исключить или смягчить. Термин «ограничение осуществления управления в состоянии высокого уровня зарядки» охватывает вариант, в котором осуществление управления в состоянии высокого уровня зарядки запрещается, когда температура исполнительного механизма выше, чем некоторое пороговое значение, а также вариант, в котором осуществление управления в состоянии высокого уровня зарядки происходит в течение укороченного периода времени, а не запрещается полностью.
(18) В системе подвески согласно любому из вариантов (9)-(17) управляющее устройство имеет конфигурацию, обеспечивающую запрет продолжения осуществления управления в состоянии высокого уровня зарядки сверх заданного допустимого времени продолжения.
(19) В системе подвески согласно любому из вариантов (9)-(18) управляющее устройство имеет конфигурацию, обеспечивающую запрет возобновления осуществления управления в состоянии высокого уровня зарядки до истечения заданного допустимого времени запрета возобновления.
Каждый из вышеупомянутых двух вариантов является вариантом, в котором накладывается ограничение на управление в состоянии высокого уровня зарядки. Как описано выше, влияние тепла, генерируемого электрическим двигателем, становится серьезным, когда состояние генерирования постоянной силы поддерживается в течение длительного периода времени или когда состояние генерирования постоянной силы устанавливается часто на небольшой интервал времени. В соответствии с каждым из вышеупомянутых двух вариантов, можно эффективно ограничивать период времени, на который устанавливается состояние генерирования постоянной силы. То есть, каждый из вышеупомянутых двух вариантов является вариантом, эффективным для случая, когда температура исполнительного механизма является высокой. Отметим, что каждое из вышеописанных «заданного допустимого времени продолжения» и «заданного допустимого времени запрета возобновления» может быть либо заданным неизменным периодом времени, либо изменяющимся периодом времени, который изменяется в зависимости от параметра, такого как температура исполнительного механизма. Отметим также, что в варианте, в котором оба вышеупомянутых варианта скомбинированы друг с другом, управление в состоянии высокого уровня зарядки можно осуществлять с прерываниями.
(20) В системе подвески согласно любому из вариантов (9)-(19) управляющее устройство имеет конфигурацию, обеспечивающую снижение уровня зарядки аккумуляторной батареи посредством электрического разрядника, предусмотренного в транспортном средстве, когда осуществление управления в состоянии высокого уровня зарядки ограничено, а аккумуляторная батарея находится в состоянии высокого уровня зарядки.
В данном варианте, аккумуляторная батарея может быть наверняка разряжена даже тогда, когда разрядка аккумуляторной батареи не осуществляется путем установления состояния генерирования постоянной силы в состоянии высокого уровня зарядки. «Электрический разрядник», указанный в этом варианте, может быть обеспечен резистором, который соединен с аккумуляторной батареей, потребляя электрическую мощность аккумуляторной батареи. Кроме того, если батарея функционирует также в качестве источника питания для электродвигателя привода системы гибридного привода, то «электрический разрядник» может быть обеспечен компоновкой, в который привод транспортного средства с помощью электрического двигателя принудительно осуществляется вместо привода транспортного средства с помощью двигателя.
(21) В системе подвески согласно любому из вариантов (1)-(20) управляющее устройство имеет конфигурацию, обеспечивающую ограничение установления состояния генерирования постоянной силы, когда аккумуляторная батарея находится в состоянии низкого уровня зарядки.
Поскольку аккумуляторная батарея разряжается посредством установления состояния генерирования постоянной силы, как описано выше, установление состояния генерирования постоянной силы в течение состояния низкого уровня зарядки аккумуляторной батареи вызывает ситуацию, в которой электрическая энергия, остающаяся в аккумуляторной батарее, чересчур уменьшается, или может вызвать даже ситуацию, в которой аккумуляторная батарея оказывается в избыточно разряженном состоянии. В данном варианте появляется возможность эффективно предотвратить или ограничить вред, причиняемый установлением состояния генерирования постоянной силы, когда уровень зарядки аккумуляторной батареи является низким. Термин «ограничение установления состояния генерирования постоянной силы» интерпретируется как означающий не только запрет установления состояния генерирования постоянной силы, но и также уменьшение степени состояния генерирования постоянной силы, такое как уменьшение постоянной силы исполнительного механизма. Более конкретно, появляется возможность воплотить компоновку, в которой установление состояния генерирования постоянной силы запрещается, когда уровень зарядки становится равным некоторому пороговому значению или меньшим, чем оно (например, когда параметр, характеризующий состояние зарядки аккумуляторной батареи, становится равным этому пороговому значению или меньшим, чем оно).
Если описывать конкретно, то данный вариант может быть вариантом, в котором коррекция высоты транспортного средства с помощью силы исполнительного механизма ограничена, если конфигурация системы гарантирует возможность коррекции высоты транспортного средства силой исполнительного механизма. Кроме того, если конфигурация системы обеспечивает осуществление управления с ограничением крена или продольного наклона кузова транспортного средства правыми и левыми исполнительными механизмами или передними и задними исполнительными механизмами, которые выполнены с возможностью генерирования в качестве сил исполнительных механизмов соответствующих сил, которые противоположны друг другу в некоторый период времени, управление с ограничением крена или продольного наклона может быть отработано как управление, аналогичное управлению высотой транспортного средства, т.е. как управление для установления состояния генерирования полупостоянной силы, вследствие чего ограничивается осуществление управления с ограничением крена или продольного наклона, а также коррекция высоты транспортного средства.
Поскольку каждое из управления с ограничением крена и управления с ограничением продольного наклона является управлением, обуславливающим потребление определенного количества электрической мощности, запрет управления с ограничением крена или продольного наклона эффективен для ограничения потребления электрической мощности аккумуляторной батареи независимо от того, ограничено или нет установление состояния генерирования постоянной силы. Следовательно, в системе подвески, имеющей исполнительный механизм, один вариант заявляемого изобретения может быть вариантом, воплощающим технический признак, в соответствии с которым, по меньшей мере, одно из управления с ограничением крена и управления с ограничением продольного наклона запрещается без ограничения установления состояния генерирования постоянной силы в течение состояния низкого уровня зарядки аккумуляторной батареи.
Краткое описание чертежей
Фиг. 1 - схематический вид, иллюстрирующий общую конструкцию системы подвески транспортного средства согласно первому варианту осуществления изобретения.
Фиг. 2 - разрез на виде спереди, иллюстрирующий узел пружины и амортизатора, встроенный в системе подвески транспортного средства согласно первому варианту осуществления изобретения.
Фиг. 3 - схематический вид, иллюстрирующий регулятор воздуха и узел пружины и амортизатора, встроенные в системе подвески транспортного средства согласно первому варианту осуществления изобретения.
Фиг. 4 - временная диаграмма, иллюстрирующая появление составляющей силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, и составляющей силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, при движении транспортного средства, а также изменение целевой силы исполнительного механизма как суммы этих составляющих в зависимости от истекшего времени, указанного вдоль абсциссы временной диаграммы.
Фиг. 5 - график, иллюстрирующий зависимость между скоростью вращения и крутящим моментом электрического двигателя.
Фиг. 6 - графики, иллюстрирующие зависимость между величиной заряда аккумуляторной батареи и коэффициентом усиления на основании величины заряда аккумуляторной батареи и зависимость между температурой электрического двигателя и коэффициентом усиления на основании температуры электрического двигателя.
Фиг. 7 - график, иллюстрирующий функцию истекшего времени, которая предназначена для постепенного увеличения постоянной силы исполнительного механизма.
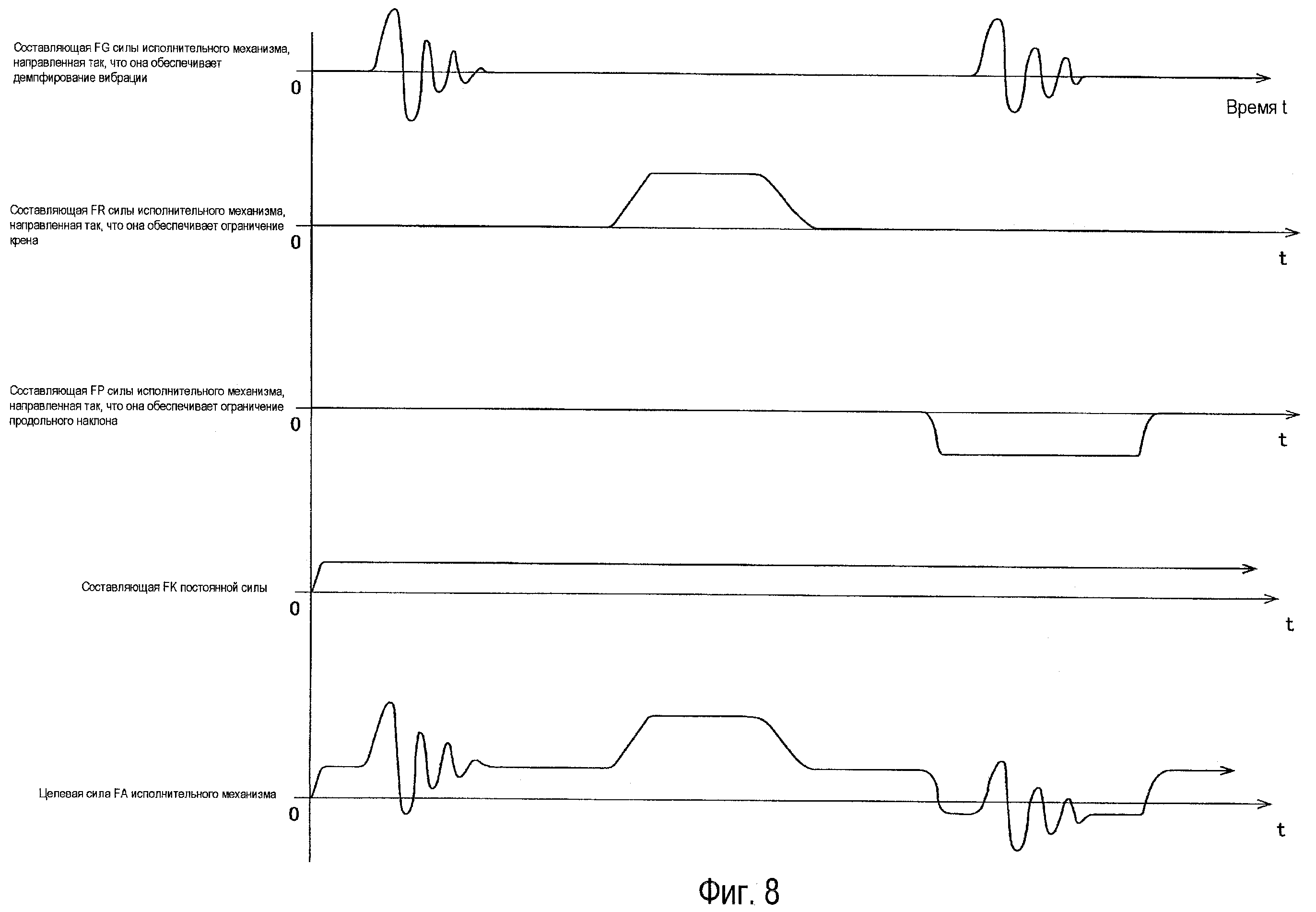
Фиг. 8 - временная диаграмма, иллюстрирующая появление составляющей силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, и составляющей силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, при движении транспортного средства, а также изменение целевой силы исполнительного механизма как суммы этих составляющих в зависимости от истекшего времени, указанного вдоль абсциссы временной диаграммы.
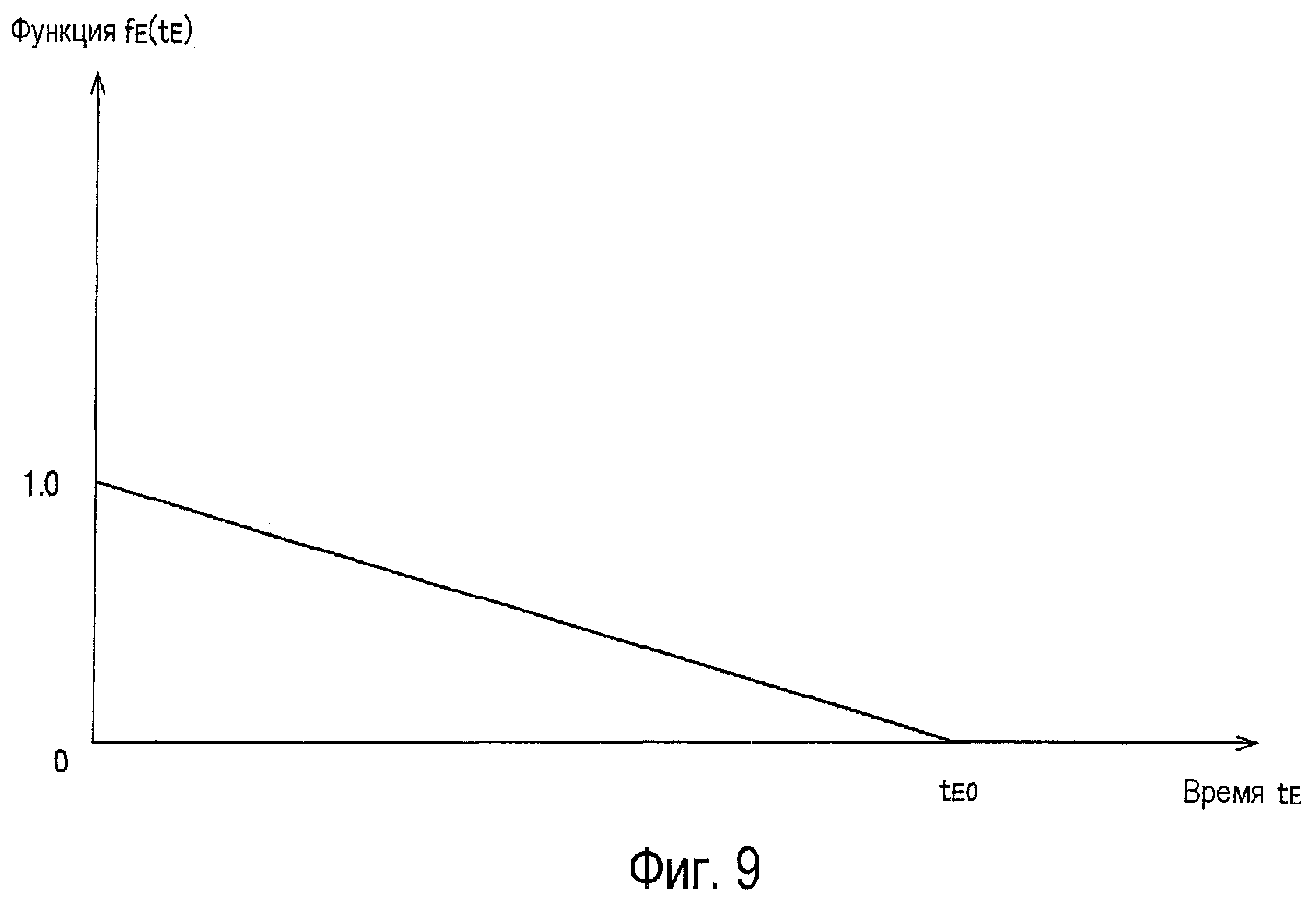
Фиг. 9 - график, иллюстрирующий функцию истекшего времени, которая предназначена для постепенного уменьшения постоянной силы исполнительного механизма.
Фиг. 10 - временная диаграмма, иллюстрирующая изменение составляющей постоянной силы при переходе от управления в состоянии высокого уровня зарядки к управлению в нормальном состоянии в зависимости от истекшего времени, указанного вдоль абсциссы временной диаграммы.
Фиг. 11 - временная диаграмма, иллюстрирующая изменение составляющей постоянной силы при осуществлении с прерываниями управлении в состоянии высокого уровня зарядки в зависимости от истекшего времени, указанного вдоль абсциссы временной диаграммы.
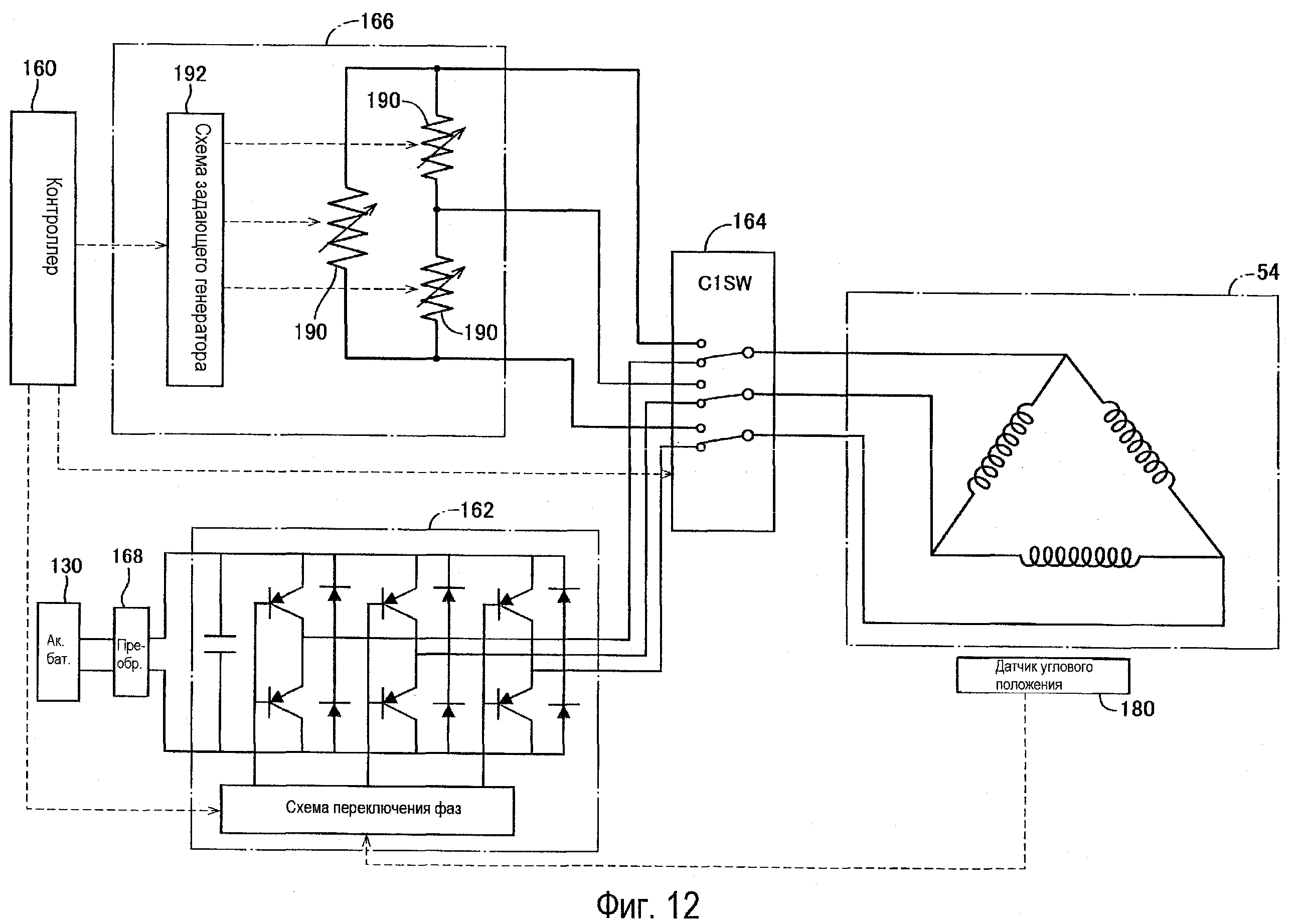
Фиг. 12 - схематический вид, иллюстрирующий переменный резистор, который введен в состав системы подвески транспортного средства согласно первому варианту осуществления.
Фиг. 13 - блок-схема последовательности операций, иллюстрирующая программу коррекции целевой высоты транспортного средства, которая выполняется при управлении системой подвески транспортного средства согласно первому варианту осуществления.
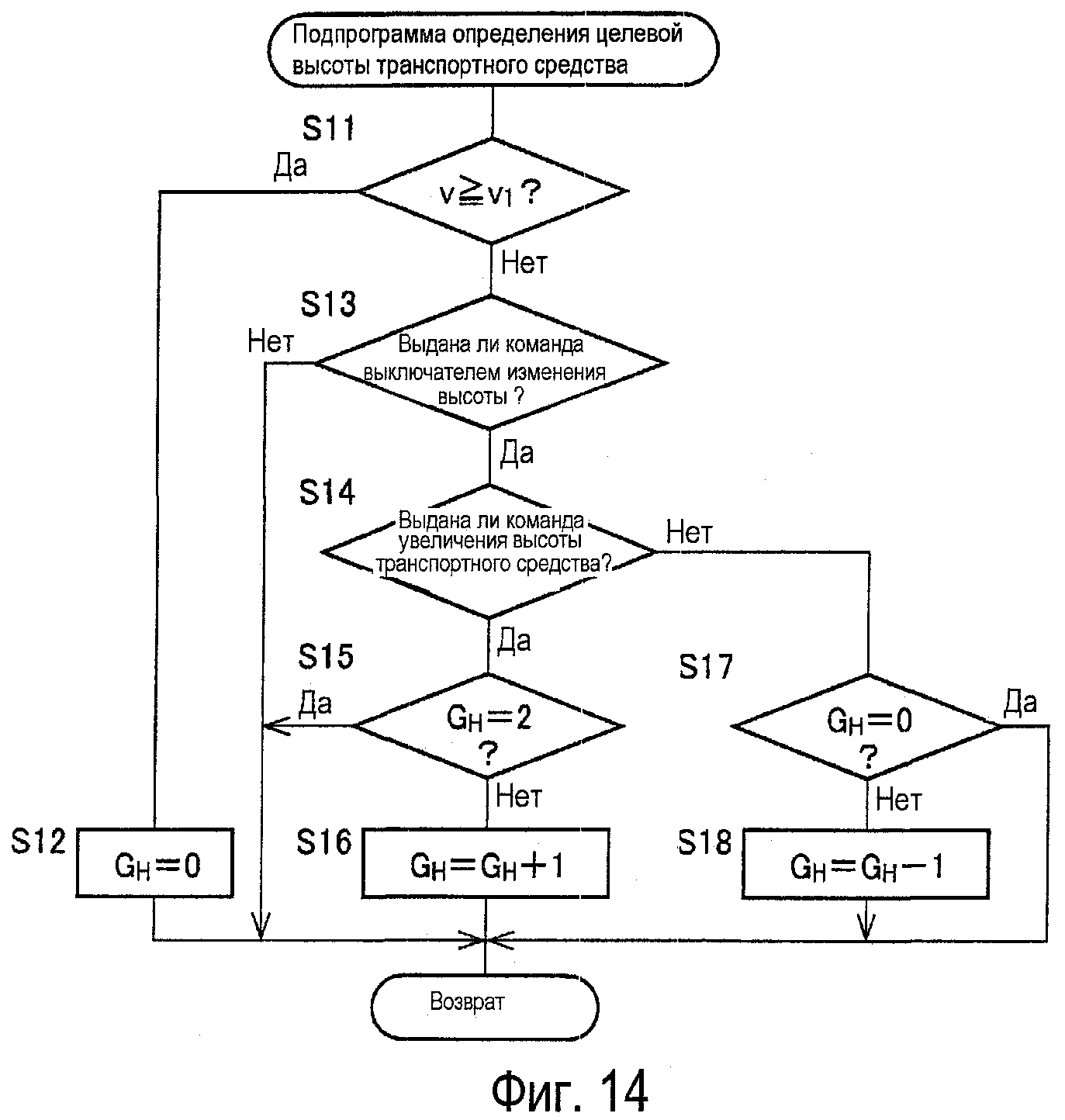
Фиг. 14 - блок-схема последовательности операций, иллюстрирующая подпрограмму определения целевой высоты транспортного средства, которая выполняется в программе коррекции высоты транспортного средства.
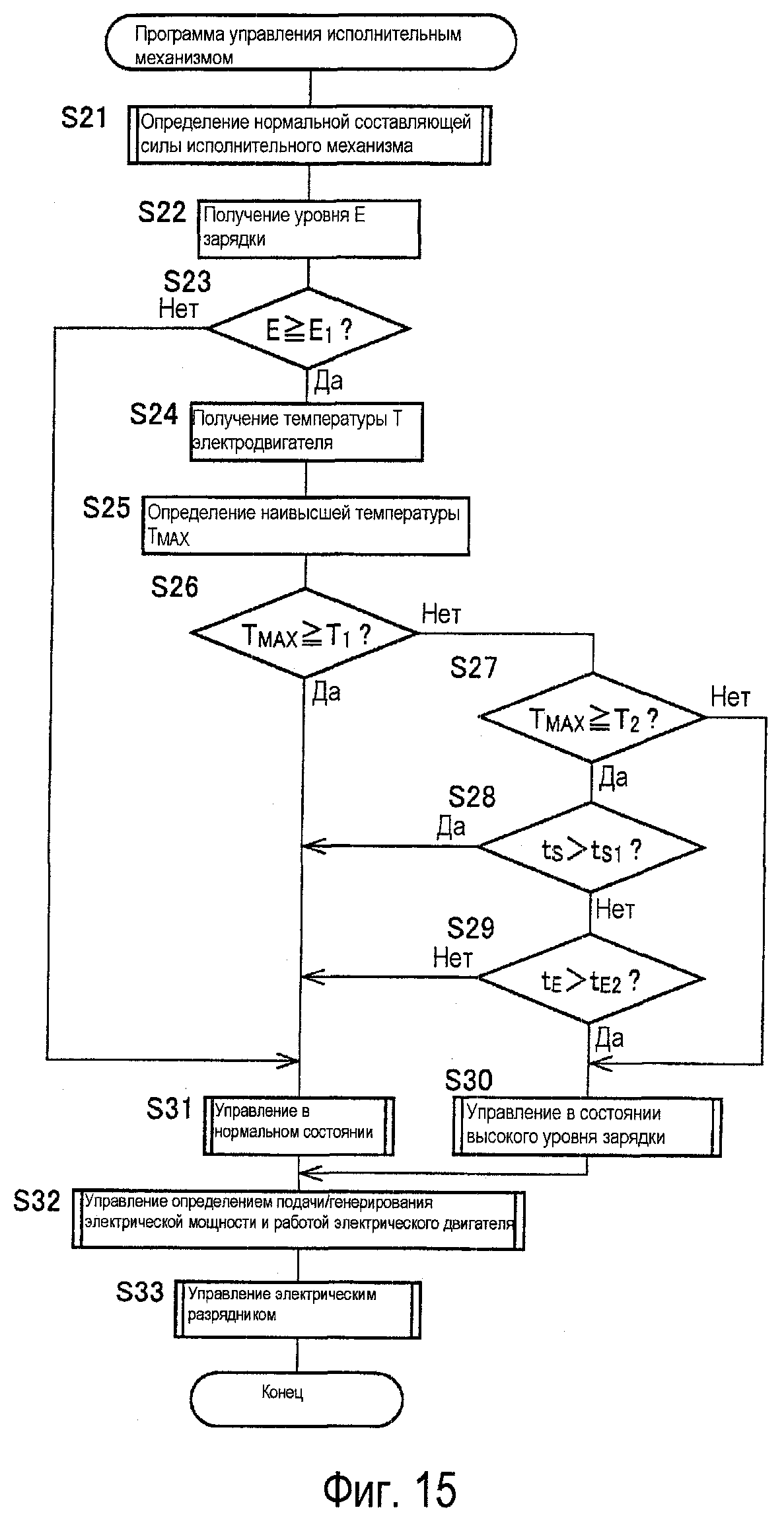
Фиг. 15 - блок-схема последовательности операций, иллюстрирующая программу управления исполнительным механизмом, которая выполняется при управлении системой подвески транспортного средства согласно первому варианту осуществления.
Фиг. 16 - блок-схема последовательности операций, иллюстрирующая подпрограмму определения нормальных составляющих силы исполнительного механизма, которая выполняется в программе управления исполнительным механизмом.
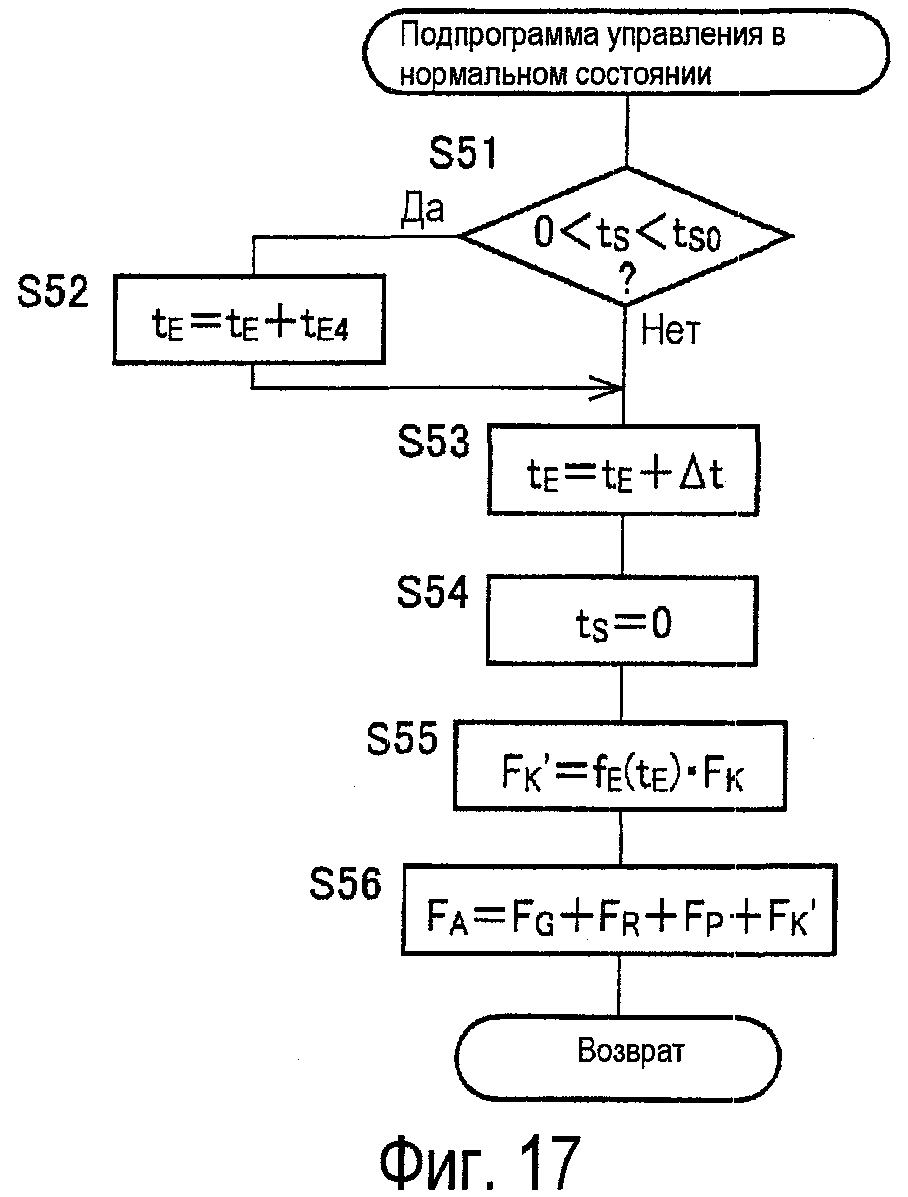
Фиг. 17 - блок-схема последовательности операций, иллюстрирующая подпрограмму управления в нормальном состоянии, которая выполняется в программе управления исполнительным механизмом.
Фиг. 18 - блок-схема последовательности операций, иллюстрирующая подпрограмму управления в состоянии высокого уровня зарядки, которая выполняется в программе управления исполнительным механизмом.
Фиг. 19 - временная диаграмма, иллюстрирующая изменение составляющей постоянной силы при переходе от управления в нормальном состоянии к управлению в состоянии высокого уровня зарядки в зависимости от истекшего времени, указанного вдоль абсциссы временной диаграммы, причем переход происходит в процессе постепенного уменьшения постоянной силы в течение управления в нормальном состоянии.
Фиг. 20 - временная диаграмма, иллюстрирующая изменение составляющей постоянной силы при переходе от управления в состоянии высокого уровня зарядки к управлению в нормальном состоянии в зависимости от истекшего времени, указанного вдоль абсциссы временной диаграммы, причем переход происходит в процессе постепенного увеличения постоянной силы в течение управления в состоянии высокого уровня зарядки.
Фиг. 21 - блок-схемы, иллюстрирующие подпрограмму управления определением подачи/генерирования электрической мощности и работой электрического двигателя и подпрограмму управления электрическим разрядником, которые выполняются в программе управления исполнительным механизмом.
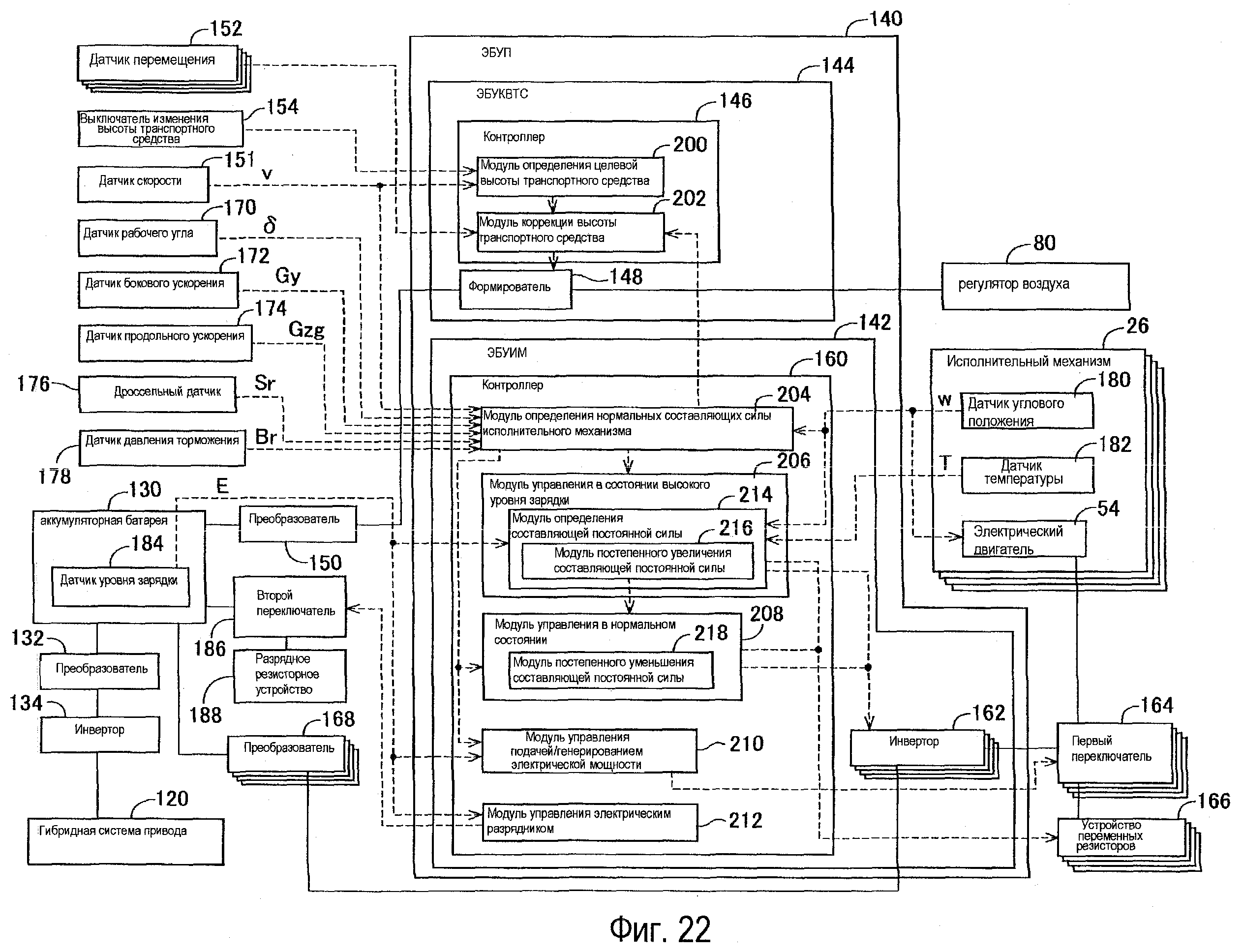
Фиг. 22 - блок-схема, иллюстрирующая функции электронного блока управления подвеской, предназначенного для управления системой подвески транспортного средства согласно первому варианту осуществления.
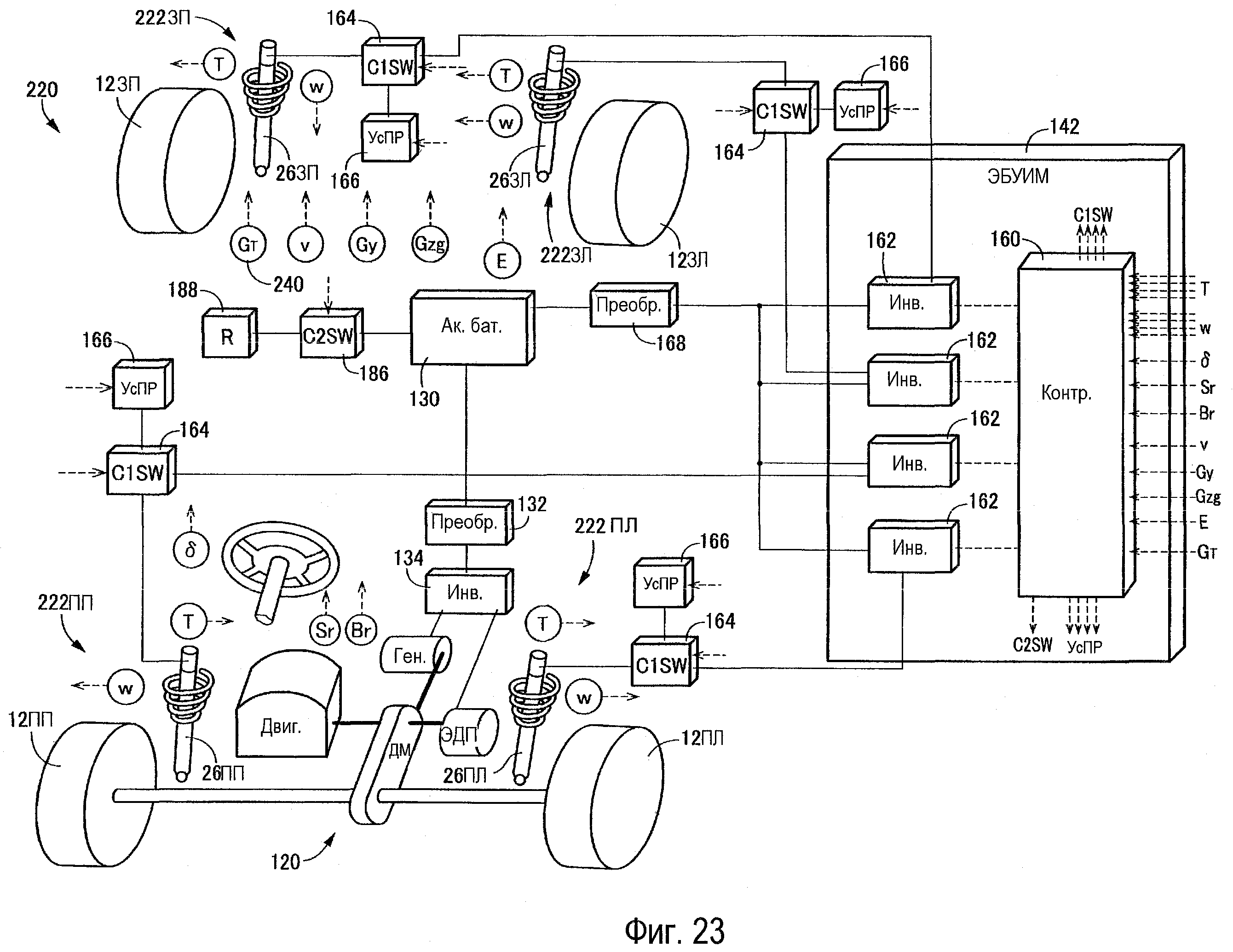
Фиг. 23 - схематический вид, иллюстрирующий общую конструкцию системы подвески транспортного средства согласно второму варианту осуществления изобретения.
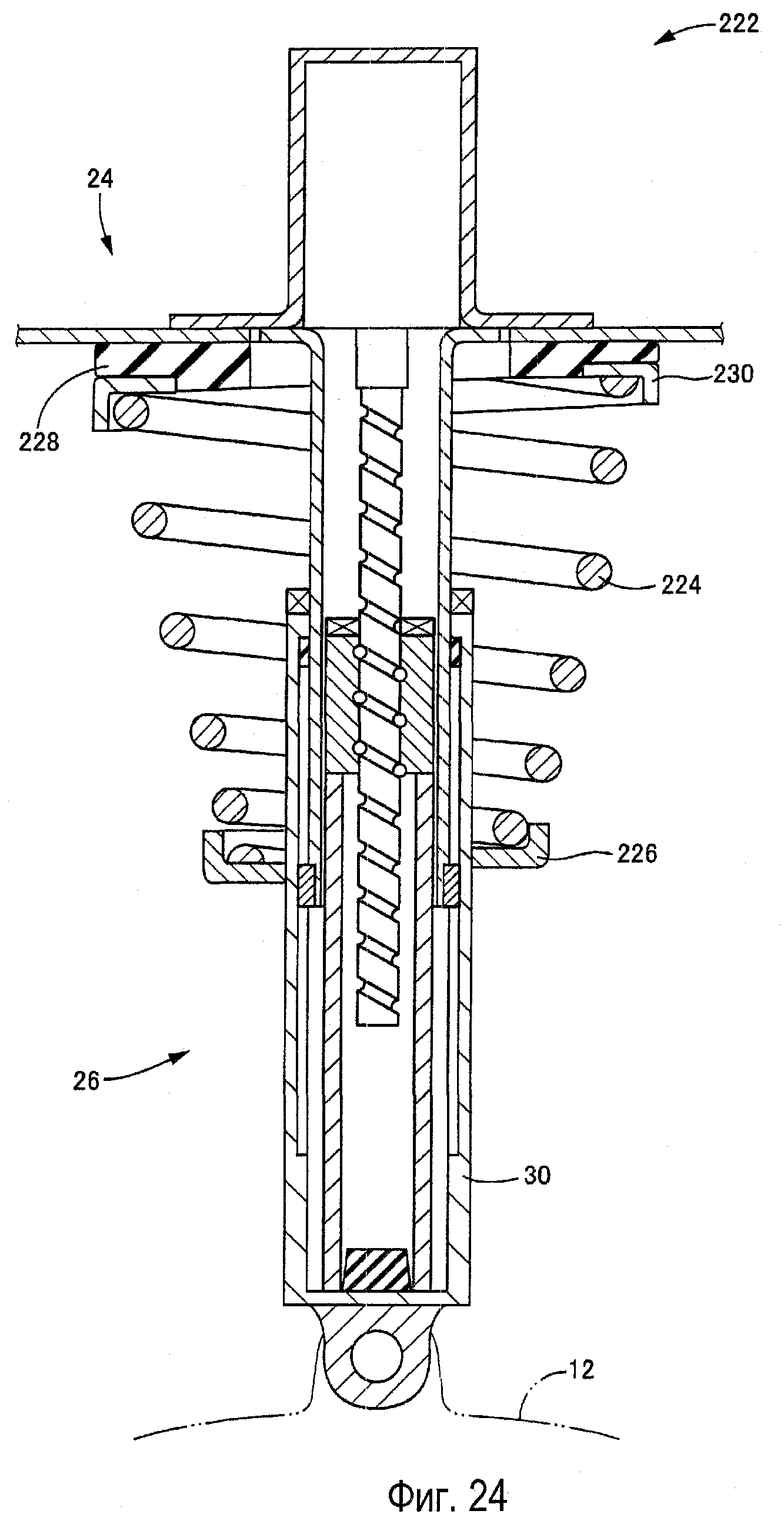
Фиг. 24 - разрез на виде спереди, иллюстрирующий разрез на виде спереди, иллюстрирующий узел пружины и амортизатора, встроенный в системе подвески транспортного средства согласно второму варианту осуществления изобретения.
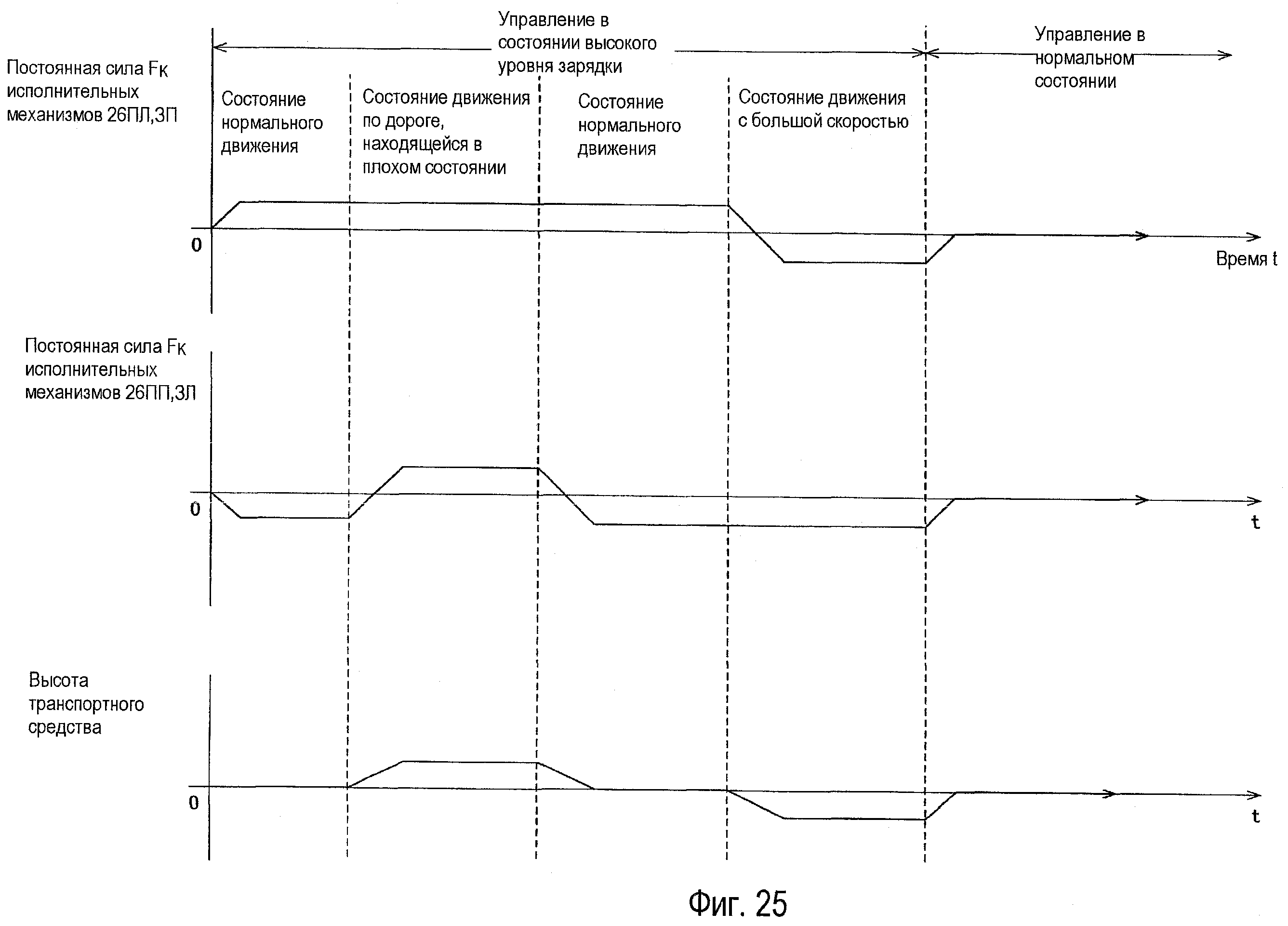
Фиг. 25 - временная диаграмма, иллюстрирующая изменение составляющей постоянной силы исполнительного механизма для исполнительного механизма, находящегося в каждом из переднего левого и заднего правого колес, изменение составляющей постоянной силы исполнительного механизма для исполнительного механизма, находящегося в каждом из переднего правого и заднего левого колес, и изменение высоты транспортного средства в зависимости от истекшего времени, указанного вдоль абсциссы временной диаграммы.
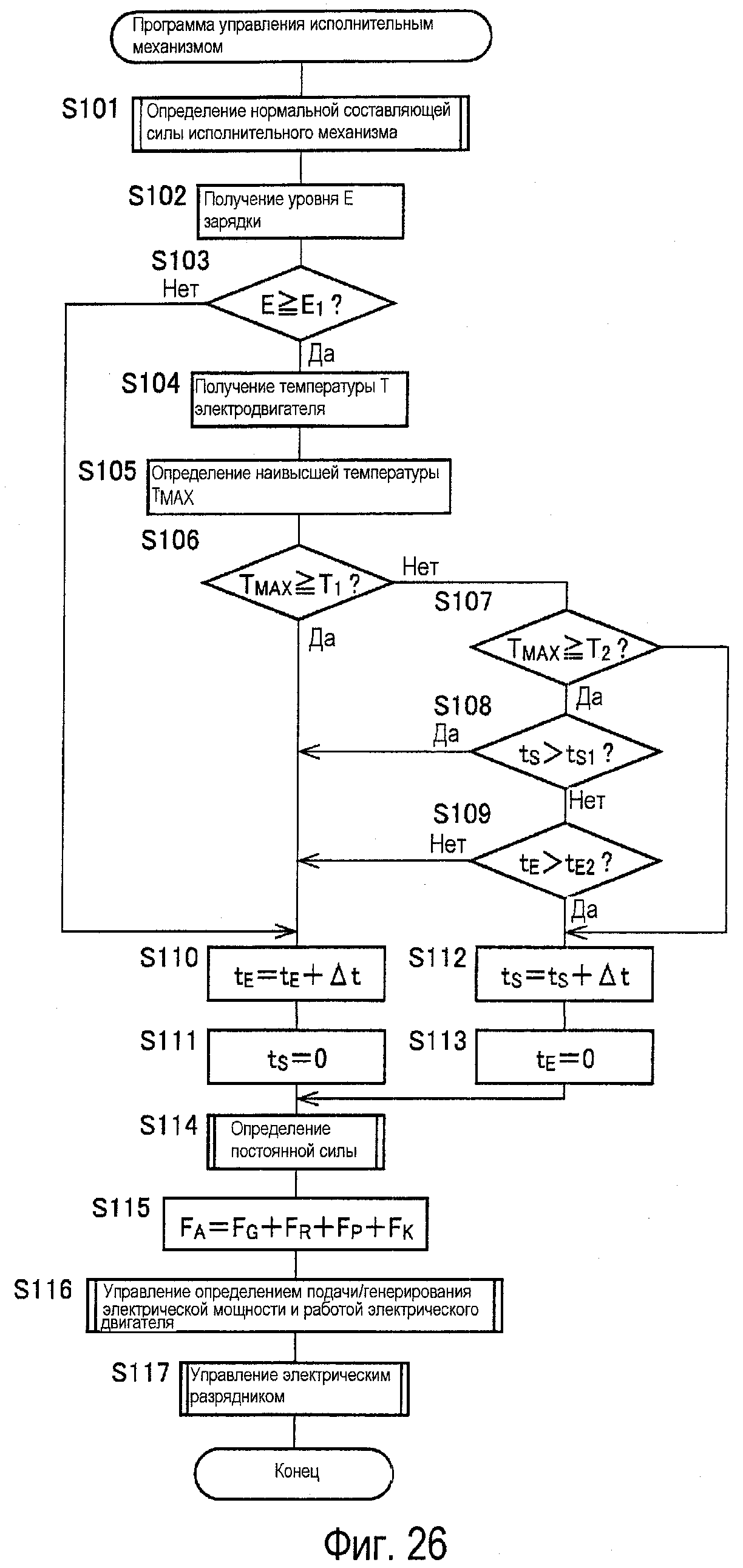
Фиг. 26 - блок-схема последовательности операций, иллюстрирующая программу управления исполнительным механизмом, которая выполняется при управлении системой подвески транспортного средства согласно второму варианту осуществления.
Фиг. 27 - блок-схема последовательности операций, иллюстрирующая подпрограмму определения постоянной силы, которая выполняется в программе управления исполнительным механизмом.
Фиг. 28 - схематический вид, иллюстрирующий общую конструкцию системы подвески транспортного средства согласно третьему варианту осуществления изобретения.
Фиг. 29 - блок-схема последовательности операций, иллюстрирующая программу управления исполнительным механизмом, которая выполняется при управлении системой подвески транспортного средства согласно третьему варианту осуществления.
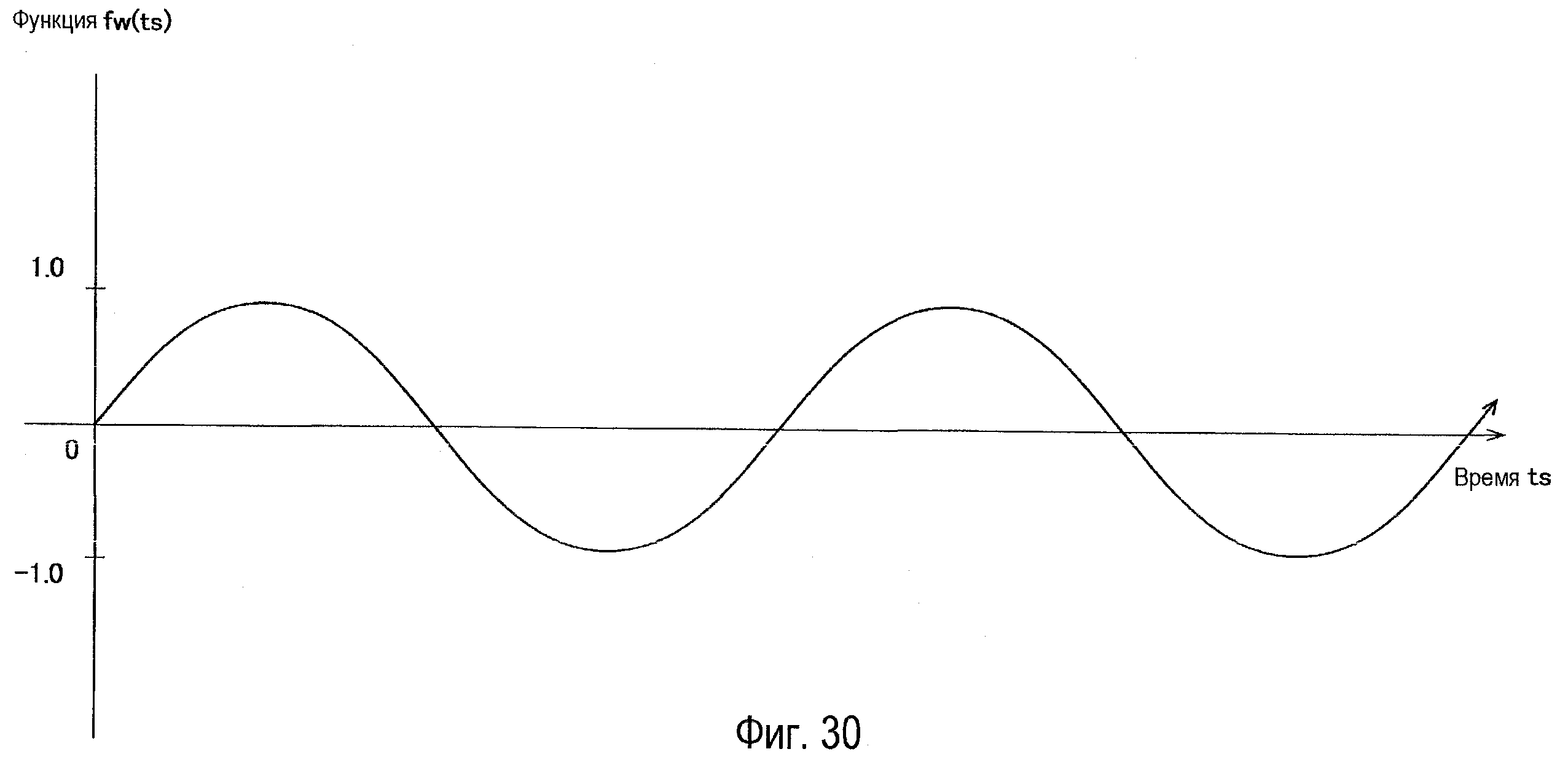
Фиг. 30 - график, иллюстрирующий функцию истекшего времени, которая предназначена для постепенного изменения постоянной силы исполнительного механизма при периодическом изменении направления постоянной силы исполнительного механизма.
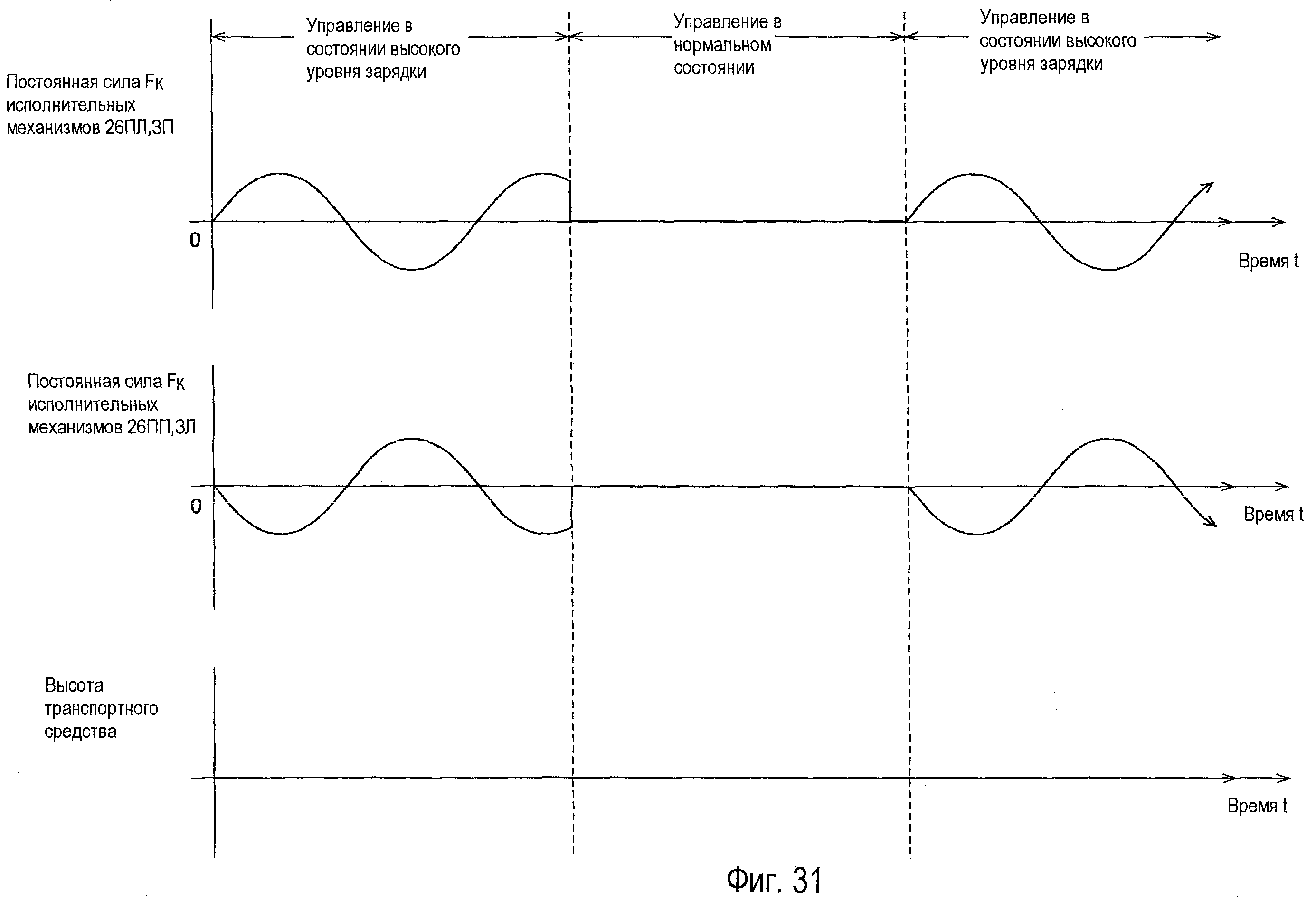
Фиг. 31 - временная диаграмма, иллюстрирующая изменение составляющей постоянной силы исполнительного механизма для исполнительного механизма, находящегося в каждом из переднего левого и заднего правого колес, изменение составляющей постоянной силы исполнительного механизма для исполнительного механизма, находящегося в каждом из переднего правого и заднего левого колес, и изменение высоты транспортного средства в зависимости от истекшего времени, указанного вдоль абсциссы временной диаграммы.
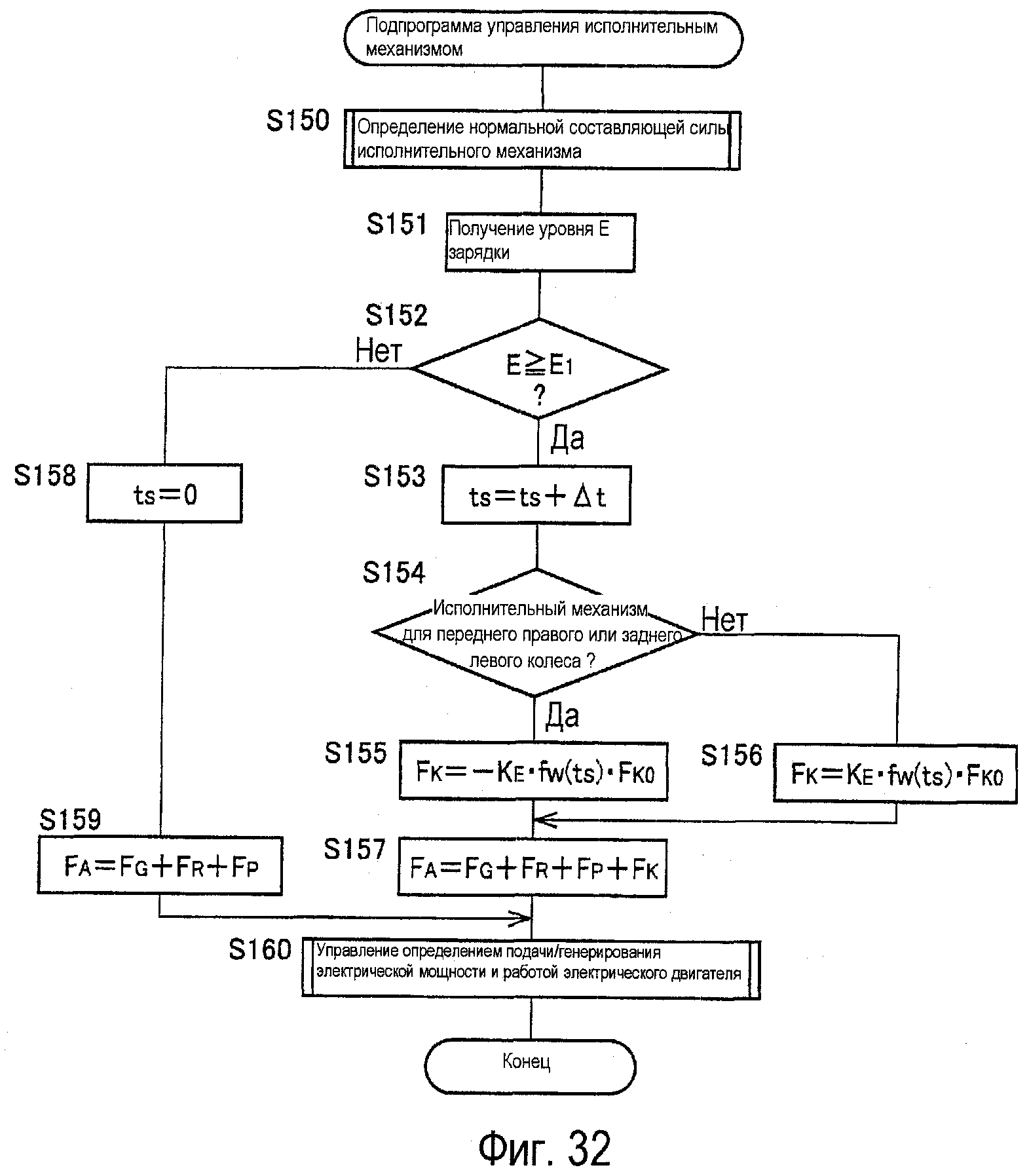
Фиг. 32 - блок-схема последовательности операций, иллюстрирующая программу управления исполнительным механизмом, которая выполняется при управлении системой подвески транспортного средства согласно четвертому варианту осуществления.
Наилучший вариант осуществления изобретения
Ниже, со ссылками на прилагаемые чертежи, будут описаны варианты осуществления настоящего изобретения. Следует понять, что заявляемое изобретение не ограничивается нижеследующими вариантами осуществления и может быть воплощено иным образом с различными изменениями и модификациями, такими как те, которые описаны разделе «Варианты изобретения» и которые могут быть известны специалистам в данной области техники.
Первый вариант осуществления изобретения
1. Конструкция и функционирование системы подвески
Фиг. 1 схематически иллюстрирует систему 10 подвески транспортного средства, выполненную в соответствии с первым вариантом осуществления изобретения. Система 10 подвески оснащена четырьмя независимыми устройствами подвески, предусмотренными для переднего правого, переднего левого, заднего правого и заднего левого колес 12 транспортного средства. Каждое из устройств подвески имеет узел 20 пружины и амортизатора, образованный подвесной пружиной и амортизатором, которые выполнены как единое целое друг с другом. В нижеследующем описании, названия и колеса 12, и узла 20 пружины и амортизатора каждый раз имеют в качестве суффикса указательные обозначения ПП, ПЛ, ЗП, ЗЛ, обозначающие соответствующие переднее правое, переднее левое, заднее правое и заднее левое колеса в случаях, где требуется пояснить, которому из четырех колес соответствует упоминаемое колесо 12 или упоминаемый узел 20.
Как показано на фиг. 2, узел 20 пружины и амортизатора оснащен электромагнитным амортизатором в форме исполнительного механизма 26 и подвесной пружиной в форме пружины 28 с текучей средой (эта пружина именуется далее «пневматической пружиной», где это уместно, поскольку в данном варианте осуществления в качестве текучей среды используется воздух). Исполнительный механизм 26 находится между нижним рычагом 22 подвески в качестве удерживающего колесо элемента, удерживающего колесо 12, и опорной частью 24, предусмотренной в кузове транспортного средства, и взаимно соединяет нижний рычаг 22 подвески и опорной частью 24. Пружина 28 с текучей средой расположена параллельно исполнительному механизму 26.
Исполнительный механизм 26 включает в себя внешнюю трубку 30 и внутреннюю трубку 32, которая установлена во внешней трубке 30 и которая выступает наружу из верхнего концевого участка внешней трубки 30. Внешняя трубка 30 соединена с нижним рычагом 22 посредством соединительного элемента 34, который предусмотрен в нижней концевой части внешней трубки 30. Внутренняя трубка 32 соединена на фланцевой части 36, которая предусмотрена в верхней концевой части внутренней трубки 32, с опорной частью 24. В поверхности внутренней стенки внешней трубки 30 предусмотрена пара направляющих пазов 38, продолжающихся в направлении (именуемом далее «осевым направлением», где это уместно), в котором проходит ось исполнительного механизма 26. В нижней концевой части внутренней трубки 32 предусмотрена пара шпонок 40, установленных в соответствующих направляющих пазах 38. Благодаря направляющим пазам 38 и шпонкам 40, внешняя трубка 30 и внутренняя трубка 32 не могут поворачиваться друг относительно друга и могут совершать перемещение друг относительно друга в осевом направлении. В верхней концевой части внешней трубки 30 предусмотрено уплотнение 42 для предотвращения с его помощью утечки воздуха из напорной камеры 44, которая описывается ниже.
Кроме того, исполнительный механизм 26 оснащен механизмом с шариковой винтовой парой и электрическим двигателем 54 (который является трехфазным бесщеточным электродвигателем постоянного тока и который далее будет именоваться просто электродвигателем 54, где это уместно). Механизм с шариковой винтовой парой выполнен включающим в себя винтовой стержень 50 и гайку 52. Винтовой стержень 50 имеет выполненную на нем наружную резьбу и введен в зацепление с гайкой 52 таким образом, что между винтовым стержнем 50 и гайкой 52 удерживаются несущие шарики. Электродвигатель 54 поддерживается закрепленным в кожухе 56 электродвигателя, который прикреплен своей фланцевой частью к верхней поверхности опорной части 24. Фланцевая часть кожуха 56 электродвигателя прикреплена к фланцевой части 36 внутренней трубки 32, так что внутренняя трубка 32 соединена с опорной частью 24 посредством кожуха 56 электродвигателя. С концевой частью винтового стержня 50 соединен как единое целое вал 58 электродвигателя в качестве вращающегося вала электродвигателя 54. То есть, винтовой стержень 50 служит в качестве продолжения вала 58 электродвигателя, вследствие чего вращается электродвигателем 54, и располагается внутри внутренней трубки 32. Кстати, гайка 52, которая введена в зацепление с винтовым стержнем 50, поддерживается неподвижной с помощью верхней концевой части несущей гайку гильзы 60, которая расположена на внутренней поверхности нижней стенки внешней трубки 30.
Пневматическая пружина 29 оснащена кожухом 70, прикрепленным к опорной части 24, пневматическим поршнем 62, прикрепленным к внешней трубке 30 исполнительного механизма 26, и диафрагмой 74, взаимно соединяющей кожух 70 и пневматический поршень 72. Кожух 70 имеет в основном трубчатую форму с крышечной частью 76. Внутренняя трубка 32 исполнительного механизма 26 проходит через отверстие, которое выполнено сквозь крышечную часть 76. Кожух 70 закреплен верхней поверхностью крышечной части 76 к нижней поверхности опорной части 24. Пневматический поршень 72 имеет в основном трубчатую форму и прикреплен к верхней части внешней трубки 30, которая установлена в пневматическом поршне 72. Кожух 70 и пневматический поршень 72 соединены друг с другом посредством диафрагмы 74, которая обеспечивает воздухонепроницаемость между кожухом 70 и пневматическим поршнем 72, так что за счет взаимодействия кожуха 70, пневматического поршня 72 и диафрагмы 74 ограничивается напорная камера 44. Напорная камера 44 наполнена сжатым воздухом. Выполненная таким образом пневматическая пружина 28 упруго поддерживает нижний рычаг 22 и опорную часть 24, т.е. колесо 12 и кузов транспортного средства, благодаря силе упругости сжатого воздуха.
Когда кузов транспортного средства и колесо 12 сближаются друг с другом или отдаляются друг от друга, внешняя трубка 30 и внутренняя трубка 32 движутся друг относительно друга в осевом направлении. В результате этого относительного движения винтовой стержень 50 и гайка 52 движутся друг относительно друга в осевом направлении, и винтовой стержень 50 вращается относительно гайки 52. Электродвигатель 54 выполнен с возможностью подачи крутящего момента вращения на винтовой стержень 50. Благодаря этому крутящему моменту вращения можно генерировать силу сопротивления, действующую в направлении, которое обуславливает запрет сближения кузова транспортного средства и колеса 12 друг с другом и отдаления их друг от друга. Эта сила сопротивления служит в качестве демпфирующей силы, противодействующей сближению кузова транспортного средства и колеса 12 друг с другом и отдалению их друг от друга, вследствие чего исполнительный механизм 26 функционирует как амортизатор. То есть, сила исполнительного механизма, действующая в направлениях, обуславливающих принудительное сближение кузова транспортного средства и колеса 12 друг с другом и отдаление их друг от друга, может служить в качестве демпфирующей силы. Кроме того, исполнительный механизм 26 имеет также функцию сближения кузова транспортного средства и колеса 12 друг с другом и отдаления их друг от друга посредством силы исполнительного механизма. Благодаря этой функции можно эффективно ограничивать крен кузова транспортного средства при поворотах транспортного средства и продольный наклон кузова транспортного средства при ускорении и торможении транспортного средства.
На верхний конец внутренней поверхности стенки внешней трубки 30 наклеен кольцевой демпфирующий резиновый сальник 77. Кроме того, другой демпфирующий резиновый сальник 78 наклеен на внутреннюю поверхность нижней стенки внешней трубки 30. Когда кузов транспортного средства и колесо 12 перемещаются в направлении (именуемом далее «направлением отскока», где это уместно) друг от друга на определенное расстояние, шпонки 40 вступают в контакт с краевой частью 79 внешней трубки 30 посредством демпфирующего резинового сальника 77. Когда кузов транспортного средства и колесо 12 перемещаются в направлении (именуемом далее «направлением подскока», где это уместно) друг к другу на определенное расстояние, нижний конец винтового стержня 50 вступает в контакт с внутреннюю поверхность нижней стенки внешней трубки 30 посредством демпфирующего резинового сальника 78. То есть, узел 20 пружины и амортизатора имеет упоры (т.е. упор подскока и упор отскока), препятствующие сближению кузова транспортного средства и колеса 12 друг с другом и отдалению их друг от друга.
Система 10 подвески оснащена регулятором 80 воздуха, который соединен с напорной камерой 44 пневматической пружины каждого узла 20 пружины и амортизатора и который имеет конфигурацию, обеспечивающую регулирование количества воздуха, запасаемого в напорной камере 44. Как показано на фиг. 3, регулятор 80 воздуха включает в себя компрессор 82, сушильную камеру 84, ограничитель 86 потока, емкость 88 высокого давления и устройство 90 индивидуальных управляющих клапанов. Компрессор 82, который оснащен насосом 92, электродвигателем 94 насоса, фильтром 96 и обратными клапанами 98, 100, имеет конфигурацию, обеспечивающую всасывание воздуха из атмосферы через фильтр 96 и обратный клапан 100 за счет срабатывания электродвигателя 94 насоса, вследствие чего воздух нагнетается, а затем выпускается через обратный клапан 98. Компрессор 82 и устройство 90 индивидуальных управляющих клапанов соединены друг с другом посредством общего канала 102. С общим каналом 102 соединены вышеописанная сушильная камера 84, конфигурация которой обеспечивает удаление воды из сжатого воздуха, вышеописанный ограничитель 86 потока, имеющий дроссельный клапан 104 и обратный клапан 106, которые расположены параллельно друг другу, и датчик 108 давления, конфигурация которого обеспечивает обнаружение давления воздуха внутри общего канала 102. Кроме того, емкость 88 высокого давления соединена с общим каналом 102 через управляющий клапан 110 наращиваемого давления, который обеспечивается нормально закрытым электромагнитным управляющим клапаном. Помимо этого, с общим каналом 102 соединен выхлопной управляющий клапан 112, который обеспечивается нормально закрытым электромагнитным управляющим клапаном и который располагается между обратным клапаном 98 и сушильной камерой 84. Устройство 90 индивидуальных управляющих клапанов оснащено индивидуальными управляющими клапанами 114, которые обеспечиваются соответствующими четырьмя нормально закрытыми электромагнитными управляющими клапанами и которые соединены с соответствующими напорными камерами 44 соответствующего узла 20 пружины и амортизатора. Индивидуальные управляющие клапаны 114 расположены на соответствующих индивидуальных каналах 116, которые взаимно соединяют общий канал 102 и соответствующие напорные камеры 44 соответствующих пневматических пружин 28 соответствующих устройств подвески.
В соответствии с вышеописанной конструкцией, в предлагаемой системе 10 подвески количество воздуха, запасаемого в напорной камере 44 пневматической пружины 28, можно изменять посредством регулятора 80 воздуха, вследствие чего пневматическая пружина 28 имеет жесткость пружины, изменяемую путем изменении количества воздуха внутри напорной камеры 44. Жесткость пружины - это отношение нагрузки, действующей на пневматическую пружину 28, к расстоянию (именуемому далее расстоянием «колесо-кузов», где это уместно) между колесом 12 и кузовом 24 транспортного средства, которые упруго соединены посредством пневматической пружины 28. Изменяя жесткость пружины, можно изменять расстояние «колесо-кузов». Если описывать конкретно, то жесткость пружины уменьшают путем увеличения количества воздуха внутри напорной камеры 44, вследствие чего можно увеличивать расстояние «колесо-кузов». С другой стороны, жесткость пружины увеличивают путем уменьшения количества воздуха внутри напорной камеры 44, вследствие чего можно уменьшать расстояние «колесо-кузов».
Как показано на фиг. 1, предлагаемая система 10 подвески установлена в транспортном средстве, в котором в качестве системы привода применяется гибридная система 120 привода. Эта гибридная система 120 привода выполнена включающей в себя двигатель 122, электродвигатель 124 привода, обеспечиваемый электрическим двигателем, генератор 126 и делитель 128 мощности (которые соответственно обозначены как «Двиг.», «ЭДП», «Ген.» и «ДМ» на фиг. 1). В данной гибридной системе 120 привода передние колеса 12ПП, 12ПЛ в качестве ведущих колес приводятся в движение посредством делителя 128 мощности в зависимости от состояния движения транспортного средства. При осуществлении привода электродвигателем 124 привода электрическая мощность подается в электродвигатель 124 привода из аккумуляторной батареи 130 в качестве источника электрической мощности через преобразователь 132 и инвертор 134 в качестве контура привода. При торможении, вращение каждого из ведущих колес 12ПП, 12ПЛ передается на электродвигатель 124 привода через делитель 128 мощности, вследствие чего электродвигатель 124 привода вращается, функционируя в качестве генератора, а электрическая мощность, генерируемая электродвигателем 124 привода, возвращается в аккумуляторную батарею 130. Кроме того, когда генератор 126 приводится в действие двигателем 122 посредством делителя 128 мощности, аккумуляторная батарея 130 заряжается электрической мощностью, которая генерируется генератором 126. Отметим, что преобразователь 132 обеспечивается двухсторонним преобразователем, который допускает протекание через него электрического тока в двух направлениях. Преобразователь 132 выполнен с возможностью увеличения напряжения электрической мощности, которая подается из аккумуляторной батареи 130, вследствие чего электрическая мощность подается из аккумуляторной батареи 130 в электродвигатель 124 привода, и выполнен с возможностью уменьшения напряжения электрической мощности, вследствие чего электрическая мощность возвращается в аккумуляторную батарею 130 из электродвигателя 124 привода.
Кроме того, предлагаемая система 10 подвески оснащена электронным блоком 140 управления подвеской (ЭБУП) в качестве управляющего устройства для управления работой узла 20 пружины и амортизатора. Этот ЭБУП 140 оснащен электронным блоком 142 управления исполнительным механизмом (ЭБУИМ) в качестве управляющего устройства для управления силой исполнительного механизма, т.е. работой исполнительного механизма 26, и электронным блоком 144 управления с коррекцией высоты транспортного средства (ЭБУКВТС) в качестве управляющего устройства для управления регулятором 80 воздуха, т.е. работой пневматической пружины 28. ЭБУКВТС 144 имеет контроллер 146, состоящий в основном из компьютера, который оснащен центральным процессором (ЦП), постоянным запоминающим устройством (ПЗУ), оперативным запоминающим устройством (ОЗУ) и т.п., и задающий генератор 148 в качестве схемы задающего генератора регулятора 80 воздуха. Электрическая мощность подается к управляющим клапанам 114 и другим элементам, входящим в состав регулятора 80 воздуха, посредством задающего генератора 148 и преобразователя 150. С контроллером 146 соединены датчик 151 скорости транспортного средства, предназначенный для обнаружения скорости движения транспортного средства (именуемой далее «скоростью транспортного средства», где это уместно), четыре датчика 152 перемещения, конфигурация каждого из которых обеспечивает обнаружение расстояния между соответствующим одним из колес 12 и кузовом 24 транспортного средства, и выключатель 154 изменения высоты транспортного средства, который приводится в действие оператором транспортного средства для изменения высоты транспортного средства. Датчик 151 скорости транспортного средства, датчики 152 перемещения и выключатель 154 изменения высоты транспортного средства соответственно обозначены как «v», «St» и «HSW» на фиг. 1. ПЗУ, входящее в состав компьютера контроллера 146, хранит заключенные в нем программы, связанные с коррекцией высоты транспортного средства, а также данные различных типов. При наличии предлагаемой системы подвески 10, оператор транспортного средства может выбирать среди трех уровней высоты транспортного средства, т.е. заданного стандартного уровня высоты (средней высоты транспортного средства), заданного высокого уровня высоты (большой высоты транспортного средства), который задают выше заданного стандартного уровня высоты, и заданного низкого уровня высоты (малой высоты транспортного средства), который задают ниже заданного стандартного уровня высоты, вследствие чего желаемый из трех уровней высоты транспортного средства выбирается в ответ на срабатывание выключателя 154 изменения высоты транспортного средства, который приводится в действие оператором транспортного средства. Этот выключатель 154 изменения высоты транспортного средства имеет конфигурацию, обеспечивающую выдачу команды увеличения высоты транспортного средства или команды уменьшения высоты транспортного средства, а именно, выдачу команды для осуществления ступенчатого перехода от одного из уровней высоты транспортного средства к более высокому или более низкому из уровней высоты транспортного средства.
С другой стороны, ЭБУИМ 142 имеет контроллер 160, состоящий в основном из компьютера, который оснащен центральным процессором (ЦП), постоянным запоминающим устройством (ПЗУ), оперативным запоминающим устройством (ОЗУ) и т.п., и инвертора 162 в качестве контура привода для электродвигателя 54, который входит в состав исполнительного механизма 26 каждого узла 20 пружины и амортизатора. Каждый электродвигатель 54 соединен посредством первого переключателя 164 (который обозначен символом C1SW на фиг. 1) с конструктивным элементом, выбранным из устройства 166 переменных резисторов, имеющего изменяемое значение сопротивления, и инвертора 162, соединенного с аккумуляторной батарей 130 посредством преобразователя 168.
Аналогично вышеописанному преобразователю 132, преобразователь 168 обеспечен двухсторонним преобразователем, который допускает протекание электрического тока через него в двух направлениях. Контроллер 160 соединен с инвертором 162, первым переключателем 164 и устройством 166 переменных резисторов, которые управляются контроллером 160, за счет чего и осуществляется управление силой исполнительного механизма, генерируемой исполнительным механизмом 26. Поскольку электрический двигатель 54 возбуждается постоянным напряжением, величина электрической мощности, подаваемой в электрический двигатель 54, изменяется путем изменения величины электрического тока, подаваемого в электрический двигатель 54. То есть, сила, генерируемая электрическим двигателем 54, зависит от величины подаваемого электрического тока, которую можно изменять, например, посредством управления широтно-импульсной модуляцией (ШИМ), осуществляемого инвертором 162. При реализации управления ШИМ, инвертор 162 выполнен с возможностью надлежащего управления скважностью, т.е. отношением времени наличия импульса к времени отсутствия импульса. Помимо вышеописанного датчика 151 скорости транспортного средства, с контроллером 160 соединены датчик 170 рабочего угла, датчик 172 бокового ускорения, датчик 174 продольного ускорения, дроссельный датчик 176, датчик 178 давления торможения, датчик 180 углового положения, датчик 182 температуры и датчик 184 уровня зарядки. Датчик 170 рабочего угла предусмотрен для обнаружения рабочего угла рулевого колеса. Датчик 172 бокового ускорения предусмотрен для обнаружения фактического ускорения кузова транспортного средства, измеряемого в поперечном направлении транспортного средства. Датчик 174 продольного ускорения предусмотрен для обнаружения фактического ускорения кузова транспортного средства, измеряемого в продольном направлении транспортного средства. Дроссельный датчик 176 предназначен для обнаружения угла открывания дроссельного клапана акселератора. Датчик 178 давления торможения предусмотрен для обнаружения давления в главном цилиндре тормозной системы. Датчик 180 углового положения предназначен для обнаружения углового положения электродвигателя 54. Датчик 182 температуры предусмотрен для обнаружения температуры электродвигателя 54. Датчик 184 уровня зарядки предусмотрен для обнаружения уровня зарядки аккумуляторной батареи 130. На фиг.1, датчик 170 рабочего угла обозначен символом «δ», датчик 172 бокового ускорения обозначен символом «Gy», датчик 174 продольного ускорения обозначен символом «Gzg», дроссельный датчик 176 обозначен символом «Sr», датчик 178 давления торможения обозначен символом «Br», датчик 180 углового положения обозначен символом «ω», датчик 182 температуры обозначен символом «Т» и датчик 184 уровня зарядки обозначен символом «Е». ПЗУ, входящее в состав компьютера контроллера 160, хранит заключенные в нем программы, связанные с коррекцией высоты транспортного средства, а также данные различных типов. Отметим, что контроллер 146 и контроллер 160 также могут осуществлять связь друг с другом. Отметим также, что аккумуляторная батарея 130 избирательно соединяется с описываемым ниже разрядным резисторным устройством 188 (которое обозначено символом «R» на фиг. 1) посредством второго переключателя 186 (который обозначен символом «C2SW» на фиг. 1).
2. Управление системой подвески
В предлагаемой системе 10 подвески, четырьмя исполнительными механизмами 26 можно управлять независимо друг от друга. То есть, управление силами исполнительных механизмов, генерируемыми соответствующими исполнительными механизмами 26, осуществляется независимо друг от друга, что позволяет осуществить управление (именуемое далее «управлением с демпфированием вибрации», где это уместно) для демпфирования относительной вибрации колеса и кузова транспортного средства, управление (именуемое далее «управлением с ограничением крена», где это уместно) для ограничения крена транспортного средства, и управление (именуемое далее «управлением с ограничением продольного наклона», где это уместно) для ограничения продольного наклона транспортного средства. Кроме того, пневматическая пружина осуществляет управление (именуемое далее «управлением с коррекцией высоты транспортного средства») для коррекции расстояния «колесо-кузов». Вышеописанные управление с демпфированием вибрации, управление с ограничением крена и управление с ограничением продольного наклона осуществляются за счет того, что вызывается взаимодействие сил исполнительных механизмов друг с другом и действие их в качестве демпфирующей силы, ограничивающей крен, и силы, ограничивающей продольный наклон, соответственно. Если описывать конкретно, то, управление каждым исполнительным механизмом 26 осуществляется так, что обеспечивается генерирование целевой силы исполнительного механизма, вследствие чего управление с демпфированием вибрации, управление с ограничением крена и управление с ограничением продольного наклона осуществляются одинаковым образом. Целевая сила исполнительного механизма, подлежащая генерированию, определена предварительно таким образом, что эта целевая сила исполнительного механизма соответствует сумме составляющей силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, и составляющей силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, которые являются силами исполнительных механизмов, направленными так, что обеспечиваются соответствующие управление с демпфированием вибрации, управление с ограничением крена и управление с ограничением продольного наклона. Кроме того, управление с коррекцией высоты транспортного средства путем управления регулятором 80 воздуха, который имеет конфигурацию, обеспечивающую изменение количества воздуха в пневматической пружине 28. Далее будет приведено подробное описание управления с демпфированием вибрации, управления с ограничением крена и управления с ограничением продольного наклона, а в частности - описание способов определения составляющих сил исполнительных механизмов, направленных так, что обеспечиваются соответствующие управления, наряду с подробным описанием управления работой электродвигателя 54 для управления силой исполнительного механизма, генерируемой электродвигателем 54. Более того, будет представлено подробное описание управления с коррекцией высоты транспортного средства, в частности - управление работой регулятора 80 воздуха. В нижеследующем описании, и сила исполнительного механизма, и каждая из составляющих силы исполнительного механизма принимает положительное значение, когда действует в направлении отскока, и принимает отрицательное значение, когда действует в направлении подскока.
i) Управление с демпфированием вибрации
В соответствии с управлением с демпфированием вибрации, составляющая FG силы исполнительного механизма, направленная так, что она обеспечивает демпфирование вибрации, определяется как соответствующая генерированию силы исполнительного механизма, величина которой зависит от скорости относительной вибрации колеса и кузова транспортного средства. В частности, составляющая FG силы исполнительного механизма, направленная так, что она обеспечивает демпфирование вибрации, вычисляется на основании скорости V вращения электродвигателя 54, служит значением, характеризующим относительную скорость колеса и кузова транспортного средства, и получается из значения, обнаруживаемого датчиком 180 углового положения, предусмотренным в электродвигателе 54, и в соответствии со следующим выражением:
FG=C·V (C - коэффициент демпфирования).
Отметим, что составляющую FG силы исполнительного механизма, направленную так, что она обеспечивает демпфирование вибрации, можно определить другим способом. Например, составляющую FG силы исполнительного механизма, направленную так, что она обеспечивает демпфирование вибрации, можно определить на основании скорости VU вибрации кузова транспортного средства (которая вычисляется на основании вертикального ускорения кузова транспортного средства, обнаруживаемого датчиком вертикального ускорения, предусмотренным в установочной части кузова транспортного средства) и скорости VL вибрации колеса (которая вычисляется на основании вертикального ускорения колеса, обнаруживаемого датчиком вертикального ускорения, предусмотренным в удерживающем колесо элементе) и в соответствии со следующим выражением:
FG=CU·VU-CL·VL (CU, CL - коэффициенты демпфирования).
ii) Управление с ограничением крена
В соответствии с управлением с ограничением крена, при повороте транспортного средства, в зависимости от момента крена, обуславливаемого поворотом, управление каждым из исполнительных механизмов 26, предусмотренных на внутренних колесах (т.е. на тех из колес, которые расположены между центром поворота транспортного средства и другими колесами), осуществляется так, что в качестве силы, ограничивающей крен, генерируется сила исполнительного механизма, действующая в направлении подскока, а управление каждым из исполнительных механизмов 26, предусмотренных на наружных колесах, осуществляется так, что в качестве силы, ограничивающей крен, генерируется сила исполнительного механизма, действующая в направлении отскока. Если описывать конкретно, то параметрическое боковое ускорение Gy∗ (которое используется в качестве параметра при управлении) определяется на основании оценочного бокового ускорения Gyc, оцениваемого на основании рабочего угла δ рулевого колеса и скорости V движения транспортного средства, а также фактического бокового ускорения Gyr, и в соответствии со следующим выражением:
Gy∗=KA·Gyc+KB·Gyr (KA, KB - коэффициенты усиления).
Составляющая FR силы исполнительного механизма, направленная так, что она обеспечивает ограничение крена, определяется на основании параметрического бокового ускорения Gy∗, которое определяется так, как описано выше. В контроллере 160 сохраняется карта данных, характеризующая зависимость между составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, и параметрическим боковым ускорением Gy∗, так что составляющая FR силы исполнительного механизма, направленная так, что она обеспечивает ограничение крена, определяется при обращении к упомянутой карте данных.
iii) Управление с ограничением продольного наклона
В соответствии с управлением с ограничением продольного наклона, при торможении транспортного средства, вызывающем опускание («клевок») переднего конца кузова транспортного средства, в ответ на момент продольного наклона, обуславливаемый опусканием переднего конца, управление каждым из исполнительных механизмов 26ПП, 26ПЛ, предусмотренных для передних колес, осуществляется так, что генерируется сила исполнительного механизма, действующая в направлении отскока, а управление каждым из исполнительных механизмов 26ЗП, 26ЗЛ, предусмотренных для задних колес, осуществляется так, что генерируется сила исполнительного механизма, действующая в направлении подскока, что приводит к ограничению опускания переднего конца кузова транспортного средства. При ускорении транспортного средства, вызывающем осаживание заднего конца кузова транспортного средства, в ответ на момент продольного наклона, обуславливаемый осаживанием заднего конца, управление каждым из исполнительных механизмов 26ЗП, 26ЗЛ, предусмотренных для передних колес, осуществляется так, что генерируется сила исполнительного механизма, действующая в направлении отскока, а управление каждым из исполнительных механизмов 26ПП, 26ПЛ, предусмотренных для передних колес, осуществляется так, что генерируется сила исполнительного механизма, действующая в направлении подскока, что приводит к ограничению осаживания заднего конца кузова транспортного средства. В частности, фактически измеренное продольное ускорение Gzg применяется в качестве показателя момента продольного наклона, действующего на кузов транспортного средства, а составляющая FP силы исполнительного механизма, направленная так, что она обеспечивает ограничение продольного наклона, определяется на основании фактически измеренного продольного ускорения Gzg и в соответствии со следующим выражением:
FP=KС·Gzg (KC - коэффициент усиления).
iv) Управление силой исполнительного механизма и работой электродвигателя
Когда составляющая FG силы исполнительного механизма, направленная так, что она обеспечивает демпфирование вибрации, составляющая FR силы исполнительного механизма, направленная так, что она обеспечивает ограничение крена, и составляющая FP силы исполнительного механизма, направленная так, что она обеспечивает ограничение продольного наклона, определены так, как описано выше, целевая сила FA исполнительного механизма определяется в соответствии со следующим выражением:
FА=FG+FR+FP.
Управление исполнительным механизмом 26 осуществляется так, что генерируется определенная таким образом целевая сила FA исполнительного механизма. На фиг. 4 представлена временная диаграмма, схематически иллюстрирующая появление составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, и составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, при движении транспортного средства, а также изменение целевой силы исполнительного механизма как суммы этих составляющих в зависимости от истекшего времени, указанного вдоль абсциссы временной диаграммы. Как показано на фиг. 4, управление с демпфированием вибрации, управление с ограничением крена и управление с ограничением продольного наклона осуществляются независимо друг от друга и в зависимости от ситуации. Когда эти управления осуществляются одновременно, целевая сила FA исполнительного механизма, генерируемая исполнительным механизмом 26, соответствует сумме этих составляющих, направленных так, что обеспечиваются одновременно осуществляемые управления.
Электродвигатель 54 работает, генерируя целевую силу FA исполнительного механизма, а работой электродвигателя 54 управляет инвертор 162. Если описывать подробнее, то контроллер 160 выдает управляющий сигнал, заставляющий электродвигатель 54 генерировать целевую силу FA исполнительного механизма, а выдаваемый управляющий сигнал подается в инвертор 162, так что этот инвертор 162 управляет работой электродвигателя 54. В частности, каждый из переключающих элементов, входящих в состав инвертора 162, устанавливается в одном из включенного и выключенного состояний на основании углового положения электродвигателя 54 тем образом, который устанавливает желательную структуру и желательную скважность, при этом желательная структура соответствует направлению, в котором должна действовать целевая сила FA исполнительного механизма, а желательная скважность соответствует величине, с которой генерируется целевая сила FA исполнительного механизма. В этом случае значение, обнаруживаемое датчиком 180 углового положения, применяется как угловое положение электродвигателя 54, на основании которого каждый из переключающих элементов в инверторе 162 устанавливается в одном из включенного и выключенного состояний.
В качестве рабочего состояния электродвигателя 54 возможны два состояния, в одном из которых (именуемом далее «состоянием генерирования силы исполнительного механизма на основании подаваемой электрической мощности», где это уместно) электродвигатель 54 получает электрическую мощность от аккумуляторной батареи 130 и генерирует силу исполнительного механизма, а в другом (именуемом далее «состоянием генерирования силы исполнительного механизма на основании генерируемой электрической мощности», где это уместно) электродвигатель 54 генерирует силу исполнительного механизма, генерируя при этом электрическую мощность. Электродвигатель 54 находится в одном из двух рабочих состояний, которое генерируется на основании зависимости между скоростью вращения электродвигателя 54 и силы исполнительного механизма. Фиг. 5 концептуально иллюстрирует зависимость между скоростью V вращения электродвигателя 54 и крутящим моментом Tq электродвигателя 54, соответствующим силе исполнительного механизма. Каждая из областей (а) и (b) на фиг.5 является областью, в которой крутящий момент Tq генерируется действующим в направлении, противоположном направлению вращения электродвигателя 54, а область (с) является областью, в которой крутящий момент Tq генерируется действующим в таком же направлении, что направление вращения электродвигателя 54. Граница между областями (а) и (b) обеспечивается характеристической линией короткого замыкания, которая соответствует характеристической линии, отображающей характеристику в случае короткого замыкания между входными клеммами соответствующих фаз электродвигателя, т.е. характеристической линии, отображающей зависимость между скоростью V вращения электродвигателя 54 и величиной крутящего момента Tq в случае так называемого торможения коротким замыканием. Область (а), в которой абсолютное значение крутящего момента Tq меньше, чем на этой характеристической линии короткого замыкания, является областью так называемого рекуперативного торможения, в которой электродвигатель 54 функционирует как генератор, генерируя крутящий момент торможения на основании электродвижущей силы и обеспечивая при этом возможность возврата генерируемой электрической мощности в источник питания. Между тем, область (b), в которой абсолютное значение крутящего момента Tq больше, чем на характеристической линии короткого замыкания, является областью так называемого торможения обратным вращением, в которой электродвигатель 54 получает электрическую мощность, подаваемую из источника питания, генерируя крутящий момент торможения. Кроме того, область (с) - это область, в которой электродвигатель 54 получает электрическую мощность, подаваемую из источника питания, вращаясь или генерируя крутящий момент, способствующий вращению электродвигателя 54.
Как должно быть понятно из вышеупомянутого выражения для определения составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, эта составляющая FG определяется линейным уравнением, параметром которого является скорость V вращения электродвигателя 54. Вышеописанное выражение для определения составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, можно отобразить характеристической линией, обозначенной пунктирной линией на графике согласно фиг. 5. Коэффициент С демпфирования согласно вышеупомянутому выражению характеризует наклон этой характеристической линии, а значение этого наклона меньше, чем значение наклона вышеупомянутой характеристической линии короткого замыкания. Следовательно, характеристическая линия составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, существует в вышеописанной области (а), так что сила исполнительного механизма генерируется исключительно в состоянии генерирования силы исполнительного механизма на основании генерируемой электрической мощности, когда исполнительный механизм 26 осуществляет только управление с демпфированием вибрации. С другой стороны, каждое из управления с ограничением крена и управления с ограничением продольного наклона является управлением, осуществляемым для силы исполнительного механизма, не основанным на скорости V вращения электродвигателя 54. В отличие от управления с демпфированием вибрации, при управлении с ограничением крена и управлении с ограничением продольного наклона сила исполнительного механизма генерируется с относительно большой величиной, а скорость V вращения электродвигателя 54 невелика. Следовательно, когда осуществляются управление с ограничением крена и управление с ограничением продольного наклона, электродвигатель 54 генерирует силу, по существу, в вышеописанной области (b) или области (с), так что исполнительный механизм 26 генерирует силу исполнительного механизма в состоянии генерирования силы исполнительного механизма на основании подаваемой электрической мощности. Когда управление с демпфированием вибрации осуществляется одновременно с управлением с ограничением крена и управлением с ограничением продольного наклона, электродвигатель 54 генерирует силу в одной из областей (а)-(с) на основании зависимости между силой исполнительного механизма и скоростью V электродвигателя 54 в этот момент, так что исполнительный механизм 26 генерирует силу исполнительного механизма в одном из состоянии генерирования силы исполнительного механизма на основания подаваемой электрической мощности и состояния генерирования силы исполнительного механизма на основании генерируемой электрической мощности.
v) Управление с коррекцией высоты транспортного средства
При управлении с коррекцией высоты транспортного средства, высота транспортного средства корректируется количеством воздуха, запасного в напорной камере 44 пневматической пружины 28, причем коррекция осуществляется на основании зависимости между фактической высотой транспортного средства и заданной высотой транспортного средства, которую задают, в принципе, на основании намерения оператора транспортного средства. Если описывать подробнее, то заданное расстояние «колесо-кузов», которое задается в зависимости от заданной высоты транспортного средства, сохраняется в контроллере 146 и осуществляется сравнение заданного расстояния «колесо-кузов» и фактического расстояния «колесо-кузов», обнаруживаемого датчиком 152 перемещения. При коррекции высоты транспортного средства (именуемой далее «коррекцией, увеличивающей высоту транспортного средства», где это уместно), осуществляемой, когда требуется увеличить высоту транспортного средства, электродвигатель 94 насоса приводится в действие открыванием управляющего клапана 110 наращиваемого давления, что вызывает протекание сжатого воздуха в напорную камеру 44 через индивидуальный канал до тех пор, пока фактическая высота транспортного средства не достигнет целевой высоты транспортного средства, причем индивидуальный управляющий клапан 114 и управляющий клапан 110 наращиваемого давления закрываются, когда фактическая высота транспортного средства достигает целевой высоты транспортного средства. С другой стороны, при коррекции высоты транспортного средства (именуемой далее «коррекцией, уменьшающей высоту транспортного средства», где это уместно), осуществляемой, когда требуется уменьшить высоту транспортного средства, выхлопной управляющий клапан 112 и индивидуальный управляющий клапан 114 открываются, вследствие чего сжатый воздух выпускается из напорной камеры 44 в атмосферу. Это состояние поддерживается до тех пор, пока фактическая высота транспортного средства не достигнет целевой высоты транспортного средства, причем выхлопной управляющий клапан 112 и индивидуальный управляющий клапан 110 наращиваемого давления закрываются, когда фактическая высота транспортного средства достигает целевой высоты транспортного средства. Далее, при коррекции высоты транспортного средства (именуемой далее «коррекцией, поддерживающей высоту транспортного средства», где это уместно), осуществляемой, когда не требуется изменить высоту транспортного средства, все только что упомянутые клапаны - управляющий клапан 110 наращиваемого давления, выхлопной управляющий клапан 112 и индивидуальный управляющий клапан 114 - закрыты. Осуществление вышеописанных коррекции, увеличивающей высоту транспортного средства, и коррекции, уменьшающей высоту транспортного средства, запрещается, когда удовлетворяются определенные условия запрета. Если описывать конкретно, то условия запрета заключаются в том, что момент крена и/или момент продольного наклона действуют/действует на кузов транспортного средства, что генерируется относительная вибрация кузова транспортного средства и колеса и что расстояния «колесо-кузов транспортного средства» в соответствующих колесах не являются, по существу, равными друг другу. Осуществление коррекции, увеличивающей высоту транспортного средства, и коррекции, уменьшающей высоту транспортного средства, запрещается, когда удовлетворятся, по меньшей мере, одно из вышеописанных условий. Следует отметить, что управление работой электродвигателя 94 насоса осуществляется таким образом, что давление воздуха емкости 88 высокого давления, т.е. давление воздуха в общем канале 102, обнаруживаемое датчиком 108 давления, уравнивается с заданным давлением (то есть, задается соответствующим уровню, гарантирующему операцию увеличения высоты транспортного средства).
3. Управление в состоянии высокого уровня зарядки
В транспортном средстве, включающем в себя предлагаемую систему 10 подвески, иллюстрируемую здесь, установлена гибридная система 120 привода, компоновка которой гарантирует возврат электрической мощности в аккумуляторную батарею 130 из электродвигателя 124 привода и двигателя 122 в качестве источников мощности привода, как описано выше. При наличии этой компоновки имеем случай, в котором аккумуляторная батарея 130 находится в состоянии высокого уровня зарядки в качестве состояния ее зарядки. В этом случае требуется излучение электрической энергии из аккумуляторной батареи 130 во избежание перехода аккумуляторной батареи 130 в избыточно заряженное состояние. В предлагаемой системе 10 подвески вышеописанные управления осуществляются в качестве управления в нормальном состоянии, когда аккумуляторная батарея 130 не находится в состоянии высокого уровня зарядки в качестве состояния ее зарядки. Вместе с тем, когда состоянием зарядки аккумуляторной батареи 130 является состояние высокого уровня зарядки, управление в состоянии высокого уровня зарядки осуществляется таким образом, что сила исполнительного механизма постоянно генерируется принудительным образом, вследствие чего потребляется электрическая мощность аккумуляторной батареи 130.
i) Управление исполнительным механизмом при управлении в состоянии высокого уровня зарядки
При управлении в состоянии высокого уровня зарядки, когда состояние зарядки аккумуляторной батареи является состоянием высокого уровня зарядки, в принципе, устанавливается состояние генерирования постоянной силы, а именно, устанавливается состояние, в котором генерируется постоянная сила исполнительного механизма (именуемая далее просто «постоянной силой», где это уместно). Если описывать конкретно, то, целевая сила FA исполнительного механизма, которую нужно генерировать при управлении в состоянии высокого уровня зарядки, соответствует сумме составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, и составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, а также составляющей FK постоянной силы, направленной так, что обеспечивается генерирование постоянной силы. То есть, при управлении в состоянии высокого уровня зарядки целевая сила FA исполнительного механизма определяется в соответствии со следующим выражением:
FА=FG+FR+FP+FK.
Управление исполнительным механизмом 26 осуществляется так, что генерируется эта целевая сила FA исполнительного механизма. Отметим, что во всех исполнительных механизмах 26 соответствующих колес 12 составляющая FK постоянной силы исполнительного механизма задается представляющей собой силу, действующую в направлении отскока.
Подобно силе, ограничивающей крен, вышеописанная постоянная сила является силой исполнительного механизма, которая не зависит от скорости V вращения электродвигателя 54. Кроме того, постоянная сила - эта сила, которая может изменять расстояние «колесо-кузов», так что расстояние «колесо-кузов» при управлении в состоянии высокого уровня зарядки отличается от расстояния «колесо-кузов» при управлении в нормальном состоянии на определенную величину. Следовательно, когда управление с демпфированием вибрации не осуществляется, электродвигатель 54 вряд ли генерирует силу в области (а) на фиг. 5, и поэтому исполнительный механизм 26 генерирует силу исполнительного механизма в состоянии генерирования силы исполнительного механизма на основании подаваемой электрической мощности. При управлении в состоянии высокого уровня зарядки, на протяжении большинства времени электрическая мощность подается из аккумуляторной батареи 130 в электродвигатель 54, вследствие чего происходит эффективное потребление электрической мощности аккумуляторной батареи 130.
Вышеописанная составляющая FK постоянной силы исполнительного механизма не всегда неизменна по своей величине, а определяется на основании температуры исполнительного механизма 26, т.е. температуры электродвигателя 54, уровня зарядки аккумуляторной батареи 130 и времени, истекшего с момента времени инициирования управления в состоянии высокого уровня зарядки, и в соответствии со следующим выражением:
FK=KE·KT·fS(tS)·FK0.
В вышеуказанном выражении, FK0представляет собой эталонную постоянную силу, которая предварительно задается имеющей определенную величину, KE представляет собой коэффициент усиления, основанный на уровне зарядки аккумуляторной батареи 130, а KT представляет собой коэффициент усиления, основанный на температуре электродвигателя 54. KE представляет собой заданное значение, которое увеличивается с повышением уровня зарядки аккумуляторной батареи 130, как показано на фиг. 6(а), так что постоянная сила делается относительно большой, а это приводит к росту величины потребления электрической мощности, когда уровень зарядки аккумуляторной батареи 130 является относительно высоким. Поэтому составляющая FK постоянной силы исполнительного механизма определяется имеющей относительно большую величину, когда уровень зарядки аккумуляторной батареи 130 является относительно высоким. Далее, коэффициент KT усиления - это коэффициент усиления, основанный на температуре электродвигателя 54, который уменьшается с увеличением температуры электродвигателя 54, как показано на фиг. 6(b), так что постоянная сила делается относительно малой во избежание перегрева электродвигателя 54, когда температура электродвигателя 54 является относительно высокой. Поэтому составляющая FK постоянной силы исполнительного механизма определяется имеющей относительно малую величину, когда температура электродвигателя 54 является относительно высокой. Далее, fS(tS) - это функция, основанная на истекшем времени, и она изменяется, предотвращая внезапное генерирование постоянной силы большой величины. Если описывать конкретно, то, как показано на фиг. 7, функция fS(tS) линейно возрастает от 0 (нуля) до 1 (единицы) постепенно по мере истечения времени tS с момента инициирования управления в состоянии высокого уровня зарядки, а затем поддерживается на уровне 1 (единицы) после наступления момента tS0 процесса возрастания.
На фиг. 8 представлена временная диаграмма, иллюстрирующая появление составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, и составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, при движении транспортного средства, а также изменение целевой силы FA исполнительного механизма как суммы этих составляющих в зависимости от истекшего времени t, указанного вдоль абсциссы временной диаграммы. Как ясно из сравнения с фиг. 4, где показана целевая сила FA исполнительного механизма при управлении в нормальном состоянии, целевая сила FA исполнительного механизма при управлении в состоянии высокого уровня зарядки вызывает постоянное генерирование силы исполнительного механизма благодаря составляющей FK постоянной силы, которая в нее вносится, так что состояние генерирования силы исполнительного механизма на основании подаваемой электрической мощности поддерживается на протяжении большинства времени в процессе осуществления управления в состоянии высокого уровня зарядки (точнее, за исключением части времени, в течение которого осуществляется управление с демпфированием вибрации). Таким образом, происходит эффективное потребление электрической мощности аккумуляторной батареи 130.
ii) Переход к управлению в нормальном состоянии
При переходе от управления в состоянии высокого уровня зарядки к управлению в нормальном состоянии постоянная сила, которая генерирована при управлении в состоянии высокого уровня зарядки, постепенно уменьшается после прекращения управления в состоянии высокого уровня зарядки, чтобы предотвратить резкое изменение силы исполнительного механизма из-за исключения составляющей FK постоянной силы. Фактически, при управлении в нормальном состоянии, целевая сила FA исполнительного механизма определяется в соответствии со следующим выражением:
FА=FG+FR+FP+FK'.
В этом выражении, FK' - это составляющая, обуславливающая уменьшение составляющей FKпостоянной силы, которая генерирована при управлении в состоянии высокого уровня зарядки. Составляющая FK' определяется на основании составляющей FKпостоянной силы и в соответствии со следующим выражением:
FK'=fE(tE)·FK.
В этом выражении, fE(tE) - это функция, параметром которой является время, истекшее с момента времени инициирования управления в нормальном состоянии. Как показано на фиг. 9, функция fE(tE) линейно убывает от 1 (единицы) до 0 (нуля) постепенно по мере истечения времени tE с момента инициирования управления в нормальном состоянии, а затем поддерживается на уровне 0 (нуля) после наступления момента tE0 процесса убывания.
iii) Поддержание высоты транспортного средства
В предлагаемой системе 10 подвески, как описано выше, во время осуществления управления с коррекцией высоты транспортного средства, коррекция, увеличивающая высоту транспортного средства, и коррекция, уменьшающая высоту транспортного средства, осуществляются до тех пор, пока не будут удовлетворены условия запрета. Поэтому высота транспортного средства поддерживается на уровне целевой высоты транспортного средства путем управления с коррекцией высоты транспортного средства после перехода от управления в нормальном состоянии к управлению в состоянии высокого уровня зарядки или при исключении постоянной силы, действующего в направлении отскока, после перехода от управления в состоянии высокого уровня зарядки к управлению в нормальном состоянии. Коррекция высоты транспортного средства осуществляется путем изменения жесткости пружины, присущей пневматической пружине 28, осуществляемого посредством увеличения или уменьшения количества воздуха, запасенного в напорной камере 44 пневматической пружины 28, так что поддержание высоты транспортного средства, осуществляемое путем уменьшения количества воздуха в напорной камере 44, требует меньшего периода времени, чем поддержание высоты транспортного средства, осуществляемое путем увеличения количества воздуха в напорной камере 44. С учетом этого, вышеописанное время tS0 процесса возрастания (см. фиг. 7) задается меньшим, чем вышеописанное время tE0 процесса убывания (см. фиг. 9), так что скорость изменения постоянной силы при увеличении постоянной силы исполнительного механизма больше, чем при уменьшении постоянной силы исполнительного механизма. В результате этого, как показано на фиг. 10, изменение постоянной силы при переходе от управления в состоянии высокого уровня зарядки к управлению в нормальном состоянии происходит медленнее, чем изменение постоянной силы при переходе от управления в нормальном состоянии к управлению в состоянии высокого уровня зарядки.
iv) Ограничение, накладываемое на управление в состоянии высокого уровня зарядки
В принципе, управление в состоянии высокого уровня зарядки осуществляется, когда состояние зарядки аккумуляторной батареи 130 является состоянием высокого уровня зарядки. В частности, управление в состоянии высокого уровня зарядки осуществляется, когда уровень Е зарядки аккумуляторной батареи 130 не ниже, чем пороговый уровень Е1 зарядки. Вместе с тем, когда температура электродвигателя 54 является высокой, осуществление управления в состоянии высокого уровня зарядки ограничивается с учетом серьезного влияния тепла, генерируемого электродвигателем 54. Если описывать подробнее, то, когда температура Т электродвигателя 54 не ниже, чем вторая пороговая температура Т2, которая задается меньшей, чем первая пороговая температура Т1, продолжение осуществления управления в состоянии высокого уровня зарядки вне пределов предварительно определенного допустимого времени t1 продолжения запрещается, а возобновление управления в состоянии высокого уровня зарядки запрещается до истечения предварительно определенного допустимого времени t2 запрета. То есть, когда температура Т электродвигателя ниже, чем первая пороговая температура Т1, и не ниже, чем вторая пороговая температура Т2, управление в состоянии высокого уровня зарядки осуществляется с прерываниями, как показано на фиг. 11. Отметим, что каждая из составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, и составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, задана равной 0 (нулю) на фиг. 11. Отметим также, что на каждый из всех исполнительных механизмов 26 должно быть наложено ограничение, в соответствии с которым постоянная сила не генерируется, когда управление в состоянии высокого уровня зарядки ограничено. Следовательно, в данном варианте осуществления, наиболее высокая из температур соответствующих четырех электродвигателей 54, предусмотренных в соответствующих четырех исполнительных механизмах 26, применяется как характерная температура при определении того, должно ли быть ограничено осуществление управления в состоянии высокого уровня зарядки, или нет. Вместе с тем, для определения ограничения, накладываемого на осуществление управления в состоянии высокого уровня зарядки, можно использовать среднюю из температур соответствующих четырех электродвигателей 54.
v) Ограничение, накладываемое на возврат электрической мощности при управлении в состоянии высокого уровня зарядки
Когда вышеописанное управление в состоянии высокого уровня зарядки осуществляется для разрядки электрической энергии из аккумуляторной батареи 130, возникает случай, в котором зависимость между крутящим моментом Tq электродвигателя 54, соответствующим целевой силе FA исполнительного механизма, и скоростью V вращения электродвигателя 54 принадлежит вышеописанной области рекуперативного торможения (области (а) на фиг. 5). То есть, возникает случай, в котором, когда исполнительный механизм 26 генерирует не только постоянную силу, но и также демпфирующую силу, электродвигатель 54 находится в состоянии генерирования силы исполнительного механизма на основании генерируемой электрической мощности даже во время осуществления управления в состоянии высокого уровня зарядки. Ввиду этого, в предлагаемой системе 10 подвески применяется средство гарантирования генерирования подходящего целевой силы FA исполнительного механизма с предотвращением возврата электрической мощности, генерируемой электродвигателем 54, в аккумуляторную батарею 130. Если описывать конкретно, то контроллер 160 сохраняет сводимые в карту данные, показанные на фиг. 5, так что определение того, находится ли электродвигатель 54 в состоянии генерирования силы исполнительного механизма на основании генерируемой электрической мощности, или нет, осуществляется на основании зависимости между крутящим моментом Tq электродвигателя 54 (для генерирования целевой силы FA исполнительного механизма) и текущим значением скорости V вращения электродвигателя 54 с обращением к карте данных. Когда определяется, что электродвигатель 54 находится в состоянии генерирования силы исполнительного механизма на основании генерируемой электрической мощности, электрическая энергия, генерируемая электродвигателем 54, потребляется устройством 166 переменных резисторов. Как схематически показано на фиг. 12, устройство 166 переменных резисторов выполнено включающим в себя три переменных резистора 190 и схему 192 задающего генератора. Эти три переменных резистора находятся между входными клеммами соответствующих фаз электродвигателя 54, а схема 192 задающего генератора имеет конфигурацию, обеспечивающую изменение значения сопротивления каждого из переменных резисторов 190. В течение состояния генерирования силы исполнительного механизма на основании генерируемой электрической мощности электродвигатель 54 и инвертор 162 отсоединены друг от друга первым переключателем 164, причем электродвигатель 54 и инвертор 162 соединяются друг с другом за счет срабатывания первого переключателя 164, которое осуществляется по сигналу переключения, подаваемому из контроллера 160. Затем схема 192 задающего генератора принимает управляющий сигнал, который подается из контролера 160 и который связан с целевой силой FA исполнительного механизма, и изменяет значение сопротивления каждого переменного резистора 190, делая его равным значению, соответствующему управляющему сигналу, вследствие чего управление электродвигателем 54 осуществляется так, что генерируется крутящий момент Tq, соответствующий целевой силе FA исполнительного механизма, без помощи инвертора 162, а именно, без возврата электрической мощности в аккумуляторную батарею 130.
vi) Электрический разрядник при наложении ограничения на управление в состоянии высокого уровня зарядки
Как описано выше, исполнительный механизм 26 не потребляет электрическую мощность даже в течение состояния высокого уровня зарядки аккумуляторной батареи 130, когда осуществление управления в состоянии высокого уровня зарядки запрещено. В предлагаемой системе 10 подвески в случае ограничения, накладываемого на осуществление управления в состоянии высокого уровня зарядки, аккумуляторная батарея 130 может разряжаться также по-иному, нежели путем осуществления управления в состоянии высокого уровня зарядки. Если описывать конкретно, то, когда осуществление управления в состоянии высокого уровня зарядки запрещено в течение состояния высокого уровня зарядки аккумуляторной батареи 130, эта аккумуляторная батарея 130 соединяется с разрядным резисторным устройством 188 за счет срабатывания второго переключателя 186, так что разрядное резисторное устройство 188 потребляет электрическую мощность аккумуляторной батареи 130. В предлагаемой системе подвески обеспечение такого электрического разрядника гарантирует плавный сброс состояния высокого уровня зарядки аккумуляторной батареи 130.
4. Программы управления
Вышеописанное управление с коррекцией высоты транспортного средства осуществляется в соответствии с программой управления с коррекцией высоты транспортного средства, показанной на блок-схеме последовательности операций согласно фиг. 13. Эта программа управления осуществляется с повторениями контроллером 146 на коротком интервале времени (например, несколько десятков миллисекунд), а выключатель зажигания транспортного средства при этом находится во включенном состоянии. Кроме того, вышеописанное управление силой исполнительного механизма осуществляется в соответствии с программой управления исполнительным механизмом, показанной на блок-схеме последовательности операций согласно фиг. 15. Эта программа управления осуществляется с повторениями контроллером 160 на коротком интервале времени (например, несколько десятков миллисекунд), а выключатель зажигания транспортного средства при этом находится во включенном состоянии. Эти две программы управления осуществляются одновременно друг с другом. Далее, со ссылками на соответствующие блок-схемы последовательности операций, показанные на чертежах, будет приведено описание этих программ управления.
i) Программа управления с коррекцией высоты транспортного средства
При выполнении процедур коррекции высоты транспортного средства в соответствии с программой управления с коррекцией высоты транспортного средства, коррекция высоты транспортного средства осуществляется на основании флага GH целевой высоты транспортного средства, используемого в качестве флага, указывающего целевую высоту транспортного средства. Значения 0, 1 и 2 флага GH соответствуют малой высоте транспортного средства, средней высоте транспортного средства и большой высоте транспортного средства, соответственно. Хотя целевая высота транспортного средства является целевой высотой транспортного средства в каждом из всех колес, существует вероятность, что расстояние «колесо-кузов» изменяется от колеса к колесу. Следовательно, среди процедур в соответствии с программой управления с коррекцией высоты транспортного средства, процедура коррекции высоты транспортного средства, т.е. процедура коррекции расстояния «колесо-кузов», выполняется индивидуально для каждого из колес.
При выполнении процедур коррекции высоты транспортного средства в соответствии с программой управления с коррекцией высоты транспортного средства, сначала выполняется подпрограмма определения целевой высоты транспортного средства, показанная на блок-схеме последовательности операций согласно фиг. 14. При выполнении этой подпрограммы, когда скорость v транспортного средства равна пороговой скорости v1 или превышает ее, значение флага, назначаемое флагу GH целевой высоты транспортного средства, задают равным 0 (нулю) для гарантии устойчивости транспортного средства. Когда скорость v транспортного средства меньше, чем пороговая скорость v1, определяют, выдается ли команда на основании срабатывания выключателя 154 изменения высоты транспортного средства. Когда определено, что эта команда выдается, значение флага, назначаемое флагу GH целевой высоты транспортного средства, изменяют в сторону увеличения высоты транспортного средства или в сторону уменьшения высоты транспортного средства в зависимости от того, является ли упомянутая команда командой увеличения высоты транспортного средства или командой уменьшения высоты транспортного средства. Затем в основной программе определяют, удовлетворяются вышеописанные условия запрета коррекции высоты транспортного средства, или нет. Когда определено, что эти условия запрета не удовлетворены, фактическое значение расстояния «колесо-кузов» в каждом из колес сравнивают с заданным значением расстояния «колесо-кузов», соответствующим значению флага, назначенным флагу GH целевой высоты транспортного средства. Когда условия запрета не удовлетворены или когда определено, что расстояние «колесо-кузов» изменять на надо, расстояние «колесо-кузов» поддерживают в соответствии с вышеописанной коррекцией, поддерживающей высоту транспортного средства. Когда определено, что нужно увеличить расстояние «колесо-кузов», это расстояние «колесо-кузов» корректируют, увеличивая его в соответствии с вышеописанной коррекцией, увеличивающей высоту транспортного средства. Когда определено, что нужно уменьшить расстояние «колесо-кузов», это расстояние «колесо-кузов» корректируют, уменьшая его в соответствии с вышеописанной коррекцией, уменьшающей высоту транспортного средства. Один цикл осуществления программы управления с коррекцией высоты транспортного средства завершается, когда вышеупомянутая последовательность процедур завершена.
ii) Программа управления исполнительным механизмом
Программа управления исполнительным механизмом выполняется для каждого из исполнительных механизмов 26 соответствующего узла 20 пружины и амортизатора, предусмотренных для соответствующих четырех колес 12. В нижеследующем описании, для упрощения описания будут описаны процедуры, выполняемые для одного из исполнительных механизмов 26 в соответствии с этой программой. При осуществлении процедур, выполняется подпрограмма определения нормальных составляющих силы исполнительного механизма, показанная на блок-схеме последовательности операций согласно фиг. 16, так что определяются составляющая FG силы исполнительного механизма, направленная так, что она обеспечивает демпфирование вибрации, составляющая FR силы исполнительного механизма, направленная так, что она обеспечивает ограничение крена, и составляющая FP силы исполнительного механизма, направленная так, что она обеспечивает ограничение продольного наклона. Сначала определяют, генерируется относительная вибрация кузова транспортного средства, или нет. Если описывать конкретно, то когда скорость вращения электродвигателя 54 равна пороговой скорости или превышает ее, определяют, что относительная вибрация кузова транспортного средства и колеса будет генерироваться или уже генерируется. Когда определено, что относительная вибрация кузова транспортного средства и колеса будет генерироваться или уже генерируется, составляющую FG силы исполнительного механизма, направленную так, что она обеспечивает демпфирование вибрации, определяют на основании скорости V вращения электродвигателя 54 для осуществления управления с демпфированием вибрации.
Далее, определяют, есть крен кузова транспортного средства, или нет. Если описывать конкретно, то определяют, что крен кузова транспортного средства будет практически вызван или уже практически вызывается в результате поворота транспортного средства, когда рабочий угол рулевого колеса равен пороговому углу или превышает его, а скорость транспортного средства равна пороговой скорости или превышает ее. Когда определено, что крен кузова транспортного средства будет практически вызван или уже практически вызывается, составляющую FR силы исполнительного механизма, направленную так, что она обеспечивает ограничение крена, определяют на основании бокового ускорения для осуществления управления с ограничением крена. Затем определяют, есть продольный наклон кузова транспортного средства, или нет. Если описывать конкретно, то поскольку при наличии продольного наклона происходят опускание переднего конца и осаживание заднего конца кузова транспортного средства, определяют, что опускание переднего конца кузова транспортного средства будет происходить или уже происходит, когда абсолютное значение продольного ускорения равно пороговому значению или превышает его, а давление торможения равно пороговому давлению или превышает его, и определяют, что осаживание заднего конца кузова транспортного средства будет происходить или уже происходит, когда абсолютное значение продольного ускорения равно пороговому значению или превышает его, а угол открывания дроссельного клапана акселератора равен пороговому значению или превышает его. Когда определено, будет происходить или уже происходит либо опускание переднего конца, либо осаживание заднего конца кузова транспортного средства, составляющую FP силы исполнительного механизма, направленную так, что она обеспечивает ограничение продольного наклона, определяют на основании бокового ускорения для осуществления управления с ограничением продольного наклона. Когда в процессе вышеупомянутых определений установлено, что относительная вибрация кузова транспортного средства и колеса, крен кузова транспортного средства и продольный наклон кузова транспортного средства не будут происходить или не происходят, каждая из соответствующих составляющих FG, FR, FP силы исполнительного механизма задается равной 0 (нулю).
Далее определяют, равен ли уровень Е зарядки аккумуляторной батареи 130, который обнаруживается датчиком 184 уровня зарядки, пороговому уровню Е1 зарядки или превышает его. Когда уровень Е зарядки равен пороговому уровню Е1 зарядки или превышает его, а именно, когда состояние зарядки аккумуляторной батареи 130 является состоянием высокого уровня зарядки, получают температуры Т электродвигателей 54, предусмотренных в соответствующих исполнительных механизмах 26, с помощью датчика 182 температуры, а затем определяют, равна наивысшая температура TMAX - в качестве наивысшей из температур Т - первой пороговой температуре Т1 или превышает ее. Когда уровень Е зарядки ниже, чем первый пороговый уровень Е1 зарядки, или когда наивысшая температура TMAX равна первой пороговой температуре Т1 или превышает ее, выполняется подпрограмма управления в нормальном состоянии, показанная на блок-схеме последовательности операций согласно фиг. 17. Кроме того, когда наивысшая температура TMAX ниже, чем первая пороговая температура Т1, определяют равна ли наивысшая температура TMAX второй пороговой температуре Т2 или превышает ее. Когда определено, что наивысшая температура TMAX ниже, чем вторая пороговая температура Т2, выполняется подпрограмма управления в состоянии высокого уровня зарядки, показанная на блок-схеме последовательности операций согласно фиг. 18. Когда определено, что наивысшая температура TMAX равна второй пороговой температуре Т2 или превышает ее, подпрограмма управления в состоянии высокого уровня зарядки выполняется с прерываниями. Если описывать подробно, то время tS (именуемо далее «временем осуществления управления в состоянии высокого уровня зарядки», где это уместно), в течение которого осуществляется управление в состоянии высокого уровня зарядки, измеряют с момента инициирования управления в состоянии высокого уровня зарядки. Когда время tS осуществления управления в состоянии высокого уровня зарядки превышает предварительно определенное время tS1, а именно, когда управление в состоянии высокого уровня зарядки осуществлено в течение предварительно определенного времени tS1, выполняется подпрограмма управления в нормальном состоянии. Далее, время tE (именуемо далее «временем осуществления управления в нормальном состоянии», где это уместно), в течение которого осуществляется управление в нормальном состоянии, измеряют с момента инициирования управления в нормальном состоянии. Выполнение подпрограммы управления в состоянии высокого уровня зарядки возобновляется, когда время tE осуществления управления в нормальном состоянии превышает предварительно определенное время tE2. А именно, в течение предварительно определенного времени tE2возобновление выполнения подпрограммы управления в состоянии высокого уровня зарядки запрещается.
При выполнении подпрограммы управления в состоянии высокого уровня зарядки определяют, удовлетворяется ли условие, в соответствии с которым время tE осуществления управления в нормальном состоянии больше 0 (нуля) и меньше, чем вышеописанное время tE0 процесса убывания, или нет. Когда это условие не удовлетворяется, прибавляют предварительно определенное время Δt к времени tS осуществления управления в состоянии высокого уровня зарядки для измерения времени осуществления управления в состоянии высокого уровня зарядки, а время tE осуществления управления в нормальном состоянии сбрасывают в 0 (нуль) для окончания измерения времени осуществления управления в нормальном состоянии. Затем, как описано выше, определяют составляющую FK постоянной силы на основании времени tS осуществления управления в состоянии высокого уровня зарядки и с обращением к карте данных, которая задана так, как показано на фиг. 6(а), (b) и фиг. 7. Потом определяют целевую силу FA исполнительного механизма как сумму составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, и составляющей FK постоянной силы.
При выполнении подпрограммы управления в нормальном состоянии определяют, удовлетворяется ли условие, в соответствии с которым время tS осуществления управления в состоянии высокого уровня зарядки больше 0 (нуля) и меньше, чем вышеописанное время tS0 процесса возрастания, или нет. Когда это условие не удовлетворяется, прибавляют предварительно определенное время Δt к времени tE осуществления управления в нормальном состоянии для измерения времени осуществления управления в нормальном состоянии, а время tS осуществления управления в состоянии высокого уровня зарядки сбрасывают в 0 (нуль) для окончания измерения времени осуществления управления в состоянии высокого уровня зарядки. Затем, как описано выше, определяют составляющую FK' для постепенного уменьшения составляющей FK целевой силы исполнительного механизма на основании времени tEосуществления управления в нормальном состоянии и с обращением к карте данных, которая задана так, как показано на фиг. 9. Потом определяют целевую силу FA как сумму составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, и составляющей FK'.
Начальная процедура подпрограммы управления в состоянии высокого уровня зарядки - это процедура, которая выполняется для плавного переключения с управления в нормальном состоянии на управление в состоянии высокого уровня зарядки, когда постоянная сила постепенно уменьшается при управлении в нормальном состоянии. То есть, это процедура плавного переключения из состояния постепенного уменьшения постоянной силы в состояние постепенного увеличения постоянной силы. Как показано на фиг. 19, для плавного изменения постоянной силы при переключении с управления в нормальном состоянии на управление в состоянии высокого уровня зарядки во время постепенного уменьшения постоянной силы необходимо, чтобы управление в состоянии высокого уровня зарядки инициировалось из состояния, которое сдвинуто на определенный период времени. То есть, значение составляющей FK постоянной силы при инициировании управления в состоянии высокого уровня зарядки должно быть равным значению FK1' составляющей FK постоянной силы при управлении в нормальном состоянии при переключении. Из функции fS(tS) для определения составляющей FK постоянной силы понятно, что составляющая FK постоянной силы принимает значение FK1' (FK=FK1'), когда время tS осуществления управления в состоянии высокого уровня зарядки принимает значение tS3 (tS=tS3). То есть, управление в нормальном состоянии можно плавно переключать на управление в состоянии высокого уровня зарядки во время постепенного уменьшения постоянной силы при управлении в нормальном состоянии путем инициирования управления в состоянии высокого уровня зарядки в момент tS3 осуществления управления в состоянии высокого уровня зарядки. Если описывать конкретно, то при переключении с управления в нормальном состоянии на управление в состоянии высокого уровня зарядки, когда время tE осуществления управления в нормальном состоянии больше 0 (нуля) и меньше, чем время tE0 процесса убывания, время tS осуществления управления в состоянии высокого уровня зарядки задают равным tS3 в момент инициирования управления в состоянии высокого уровня зарядки, а затем выполняют следующие процедуры, приведенные в описании подпрограммы управления в состоянии высокого уровня зарядки.
Аналогичным образом, начальная процедура подпрограммы управления в нормальном состоянии - это процедура, которая выполняется для плавного переключения с управления в состоянии высокого уровня зарядки на управление в нормальном состоянии, когда постоянная сила постепенно увеличивается при управлении в состоянии высокого уровня зарядки. То есть, это процедура плавного переключения из состояния постепенного увеличения постоянной силы в состояние постепенного уменьшения постоянной силы. Как показано на фиг. 20, для плавного изменения постоянной силы при переключении с управления в состоянии высокого уровня зарядки на управление в нормальном состоянии во время постепенного увеличения постоянной силы, необходимо, чтобы управление в нормальном состоянии инициировалось из состояния, которое сдвинуто на определенный период времени. То есть, значение составляющей FK постоянной силы при инициировании управления в нормальном состоянии должно быть равным значению FK1' составляющей FK постоянной силы при управлении в состоянии высокого уровня зарядки при переключении. Из функции fE(tE) для определения составляющей FK' постоянной силы понятно, что составляющая FK' постоянной силы принимает значение FK1 (FK'=FK1), когда время tEосуществления управления в нормальном состоянии принимает значение tE4 (tE=tE4). То есть, управление в состоянии высокого уровня зарядки можно плавно переключать на управление в нормальном состоянии во время постепенного увеличения постоянной силы при управлении в состоянии высокого уровня зарядки путем инициирования управления в нормальном состоянии в момент tE4 осуществления управления в нормальном состоянии. Если описывать конкретно, то при переключении с управления в состоянии высокого уровня зарядки на управление в нормальном состоянии, когда время tS осуществления управления в состоянии высокого уровня зарядки больше 0 (нуля) и меньше, чем время tS0 процесса возрастания, время tE осуществления управления в нормальном состоянии задают равным tE4 в момент инициирования управления в нормальном состоянии, а затем выполняют следующие процедуры, приведенные в описании подпрограммы управления в нормальном состоянии.
После выполнения одной из подпрограммы управления в нормальном состоянии и подпрограммы управления в состоянии высокого уровня зарядки, выполняется подпрограмма управления определением подачи/генерирования электрической мощности и работой электрического двигателя, показанная на блок-схеме последовательности операций согласно фиг. 21(а). При выполнении этой подпрограммы, определяют, находится ли зависимость между крутящим моментом Tq электродвигателя 54, соответствующим определенному целевой силе FA исполнительного механизма, и фактическим значением скорости V вращения электродвигателя 54 в области рекуперативного торможения, обращаясь к карте данных, показанной на фиг. 5. Когда определено, что эта зависимость находится в области рекуперативного торможения, и при этом соблюдается условие, в соответствии с которым аккумуляторная батарея 130 находится в состоянии высокого уровня зарядки, первый переключатель 164 срабатывает, соединяя электродвигатель 54 и устройство 166 переменных резисторов, и в это устройство 166 переменных резисторов подается управляющий сигнал, соответствующий определенному целевой силе FA исполнительного механизма. Когда определено, что упомянутая зависимость не находится в области рекуперативного торможения или когда аккумуляторная батарея 130 не находится в состоянии высокого уровня зарядки, первый переключатель 164 срабатывает, соединяя электродвигатель 54 и инвертор 162, и в этот инвертор 162 подается управляющий сигнал, соответствующий определенному целевой силе FA исполнительного механизма, так что электродвигатель 54 управляется инвертором 162. Посредством этих процедур, управление работой электродвигателя 54 осуществляется так, что генерируется целевая сила FA исполнительного механизма.
После выполнения подпрограммы управления определением подачи/генерирования электрической мощности и работой электрического двигателя выполняется подпрограмма управления электрическим разрядником, показанная на блок-схеме последовательности операций согласно фиг. 21(b). При выполнении этой подпрограммы, определяют, осуществляется управление в состоянии высокого уровня зарядки, или нет. Когда определено, что осуществляется управление в нормальном состоянии, а не управление в состоянии высокого уровня зарядки, и при этом соблюдается условие, в соответствии с которым аккумуляторная батарея 130 находится в состоянии высокого уровня зарядки, второй переключатель 186 срабатывает, соединяя аккумуляторную батарею 130 и разрядное резисторное устройство 188. Когда определено, что осуществляется управление в состоянии высокого уровня зарядки, или когда аккумуляторная батарея 130 не находится в состоянии высокого уровня зарядки, второй переключатель 186 срабатывает, отсоединяя аккумуляторную батарею 130 и разрядное резисторное устройство 188 друг от друга.
5. Функциональные конструкции контроллеров
Контроллеры 146, 160 предлагаемой системы 10 подвески, функционирующие при выполнении вышеописанных программ управления, можно считать имеющими функциональные конструкции, показанные на фиг. 22, ввиду процедур, проводимых при выполнении этих программ управления. Как можно понять из чертежа функциональных конструкций, контроллер 146 оснащен: модулем 200 определения целевой высоты транспортного средства в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур подпрограммы определения целевой высоты транспортного средства, т.е. в качестве функционального модуля, конфигурация которого обеспечивает определение целевой высоты транспортного средства; и модулем 202 коррекции высоты транспортного средства в качестве функционального модуля, конфигурация которого обеспечивает управление различными управляющими клапанами и аналогичными средствами для коррекции высоты транспортного средства. Кроме того, контроллер 160 оснащен: модулем 204 определения нормальных составляющих силы исполнительного механизма в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур подпрограммы определения нормальных составляющих силы исполнительного механизма, т.е. в качестве функционального модуля, конфигурация которого обеспечивает определение составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, и составляющей FK постоянной силы; модулем 206 управления в состоянии высокого уровня зарядки в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур подпрограммы управления в состоянии высокого уровня зарядки, т.е. в качестве функционального модуля, конфигурация которого обеспечивает осуществление управления в состоянии высокого уровня зарядки; и модулем 208 управления в нормальном состоянии в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур подпрограммы управления в нормальном состоянии, т.е. в качестве функционального модуля, конфигурация которого обеспечивает осуществление управления в нормальном состоянии. Кроме того, контроллер 160 оснащен: модулем 210 управления подачей и/или генерированием электрической мощности в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур этапов S1 - S74, т.е. в качестве функционального модуля, конфигурация которого обеспечивает определение того, в котором из состояния генерирования силы исполнительного механизма на основании подаваемой электрической мощности и состояния генерирования силы исполнительного механизма на основании генерируемой электрической мощности поддерживается электродвигатель 54, и последующее управление первым переключателем 164 в соответствии с упомянутым определением; и модулем 212 управления электрическим разрядником в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур подпрограммы управления электрическим разрядником, т.е. в качестве функционального модуля, конфигурация которого обеспечивает определение того, соединены аккумуляторная батарея 130 и разрядное резисторное устройство 188 друг с другом или отсоединены друг от друга, и последующее управление вторым переключателем 186 в соответствии с упомянутым определением. Отметим, что модуль 206 управления в состоянии высокого уровня зарядки оснащен модулем 214 определения составляющей постоянной силы в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур этапов S51 - S55, т.е. в качестве функционального модуля, конфигурация которого обеспечивает определение составляющей FK постоянной силы, а этот модуль 214 определения составляющей постоянной силы оснащен модулем 216 постепенного увеличения составляющей постоянной силы в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедуры этапа S55, т.е. в качестве функционального модуля, конфигурация которого обеспечивает постепенное увеличение составляющей FK постоянной силы. Отметим также, что модуль 208 управления в нормальном состоянии оснащен модулем 216 постепенного уменьшения составляющей постоянной силы в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур этапов S61 - S65, т.е. в качестве функционального модуля, конфигурация которого обеспечивает постепенное уменьшение составляющей FK постоянной силы.
Второй вариант осуществления изобретения
1. Конструкция системы подвески
Хотя в системе подвески транспортного средства, соответствующем данному варианту осуществления, управление с коррекцией высоты транспортного средства с помощью пневматической пружины не осуществляется, другие управления осуществляются, по существу, таким же образом, как в вышеописанном варианте осуществления. Фиг. 23 схематически иллюстрирует систему 220 подвески согласно данному варианту осуществления. Поскольку предлагаемая система 220 подвески оснащена многими конструктивными элементами, которые являются общими с системой 10 подвески транспортного средства, те же позиции, что и в вышеописанном варианте осуществления, используются для обозначения этих общих конструктивных элементов, а описание этих элементов опущено или упрощено.
Предлагаемая система 220 подвески оснащена узлом 222 пружины и амортизатора. Как показано на фиг. 24, узел 222 пружины и амортизатора оснащен электромагнитным амортизатором в форме исполнительного механизма 26 и подвесной пружиной в форме винтовой пружины 224. Исполнительный механизм 26 находится между нижним рычагом 22 подвески в качестве удерживающего колесо элемента, удерживающего колесо 12, и опорной частью 24, предусмотренной в кузове транспортного средства, и взаимно соединяет нижний рычаг 22 подвески с опорной частью 24. Винтовая пружина 224 расположена параллельно исполнительному механизму 26. На внешней трубке 30 амортизатора 36 предусмотрен нижний фиксатор 226 кольцевой формы. На нижней поверхности установочной части 24 расположен резиновый изолятор 228 вибрации. Винтовая пружина 224 расположена между нижним фиксатором 224 и верхним фиксатором 230 кольцевой формы, который расположен на нижней поверхности опорной части 24 через посредство резинового изолятора 228 вибрации.
2. Управление в состоянии высокого уровня зарядки
Подобно исполнительному механизму 226, входящему в состав узла 20 пружины и амортизатора вышеописанной системы 10 подвески, исполнительный механизм 26 имеет функцию генерирования силы исполнительного механизма, вынуждающей сближение кузова транспортного средства и колеса 12 друг с другом и отдаление их друг от друга, и выполнен с возможностью вызывать действие генерируемой силы исполнительного механизма как демпфирующей силы (противодействующей сближению кузова транспортного средства и колеса 12 друг с другом и отдалению их друг от друга), силы, ограничивающей крен, и силы, ограничивающей продольный наклон. Кроме того, исполнительный механизм 26 выполнен с возможностью заставлять силу исполнительного механизма также действовать как постоянная сила. Когда состоянием зарядки аккумуляторной батареи 130 является состояние высокого уровня зарядки, в принципе, осуществляется управление в состоянии высокого уровня зарядки. В предлагаемой системе 200 подвески во время осуществления управления в состоянии высокого уровня зарядки генерируется постоянная сила, действующая в направлении (именуемом далее «направлением постоянной силы», где это уместно), которое определяется на основании, по меньшей мере, одного фактора из состояния дорожного покрытия, по которому движется транспортное средство, и скорости движения, с которой движется транспортное средство.
При управлении в состоянии высокого уровня зарядки, когда транспортное средство едет по дороге, находящейся в плохом состоянии, такой как дорога с колдобинами и дорога с ухабами, каждый из всех исполнительных механизмов 26 генерирует постоянную силу, действующую в направлении отскока в качестве направления постоянной силы. Кроме того, когда транспортное средство движется с относительно большой скоростью, каждый из всех исполнительных механизмов 26 генерирует постоянную силу, действующую в направлении подскока в качестве направления постоянной силы. Заметим, что постоянные силы, генерируемые соответствующими исполнительными механизмами 26, являются одинаковыми по величине. Если описывать конкретно, то, когда определено, что транспортное средство едет по дороге, находящейся в плохом состоянии, на основании ускорения Gt, определяемого датчиком 240 вертикального ускорения, составляющая FK постоянной силы, предназначенная для генерирования постоянной силы, определяется в соответствии со следующим выражением:
FK=KE·KT·FK0.
В вышеуказанном выражении, FK0представляет собой эталонное постоянная сила, которое предварительно задается имеющим определенную величину, а KE и KT представляют собой те же коэффициенты усиления, которые используются в вышеописанной системе 10 подвески. Коэффициент KE усиления представляет собой заданное значение, которое увеличивается с увеличением уровня зарядки аккумуляторной батареи 130, как показано на фиг. 6(а), а коэффициент KT усиления представляет собой заданное значение, которое уменьшается с увеличением температуры электродвигателя 54, как показано на фиг. 6(b). В нижеследующем описании, и сила исполнительного механизма, и каждая из составляющих силы исполнительного механизма принимает положительное значение, когда действует в направлении отскока, и принимает отрицательное значение, когда действует в направлении подскока. Следовательно, в случае езды по дороге, находящейся в плохом состоянии, составляющая FK постоянной силы генерируется действующей в направлении, соответствующем вышеуказанному выражению. С другой стороны, в случае определения, что скорость v транспортного средства не меньше, чем пороговая скорость v1, составляющая FK постоянной силы генерируется в направлении подскока, поскольку она определяется в соответствии со следующим выражением:
FK=-KE·KT·FK0.
При управлении в состоянии высокого уровня зарядки, когда транспортное средство движется нормально, а именно, когда транспортное средство движется с небольшой скоростью по дороге, не находящейся в плохом состоянии, два из четырех исполнительных механизмов 26 для колес 12, находящихся в соответствующих положениях, которые расположены по диагонали друг к другу, предназначены для генерирования соответствующих сил, которые действуют в направлении отскока в качестве направления постоянной силы, а другие два из упомянутых четырех исполнительных механизмов 26 предназначены для генерирования соответствующих сил, которые действуют в направлении подскока в качестве направления постоянной силы. Если описывать конкретно, то составляющая FK постоянной силы, которую должен генерировать каждый из двух исполнительных механизмов 26ПЛ, 26ЗП для переднего левого и заднего правого колес 12ПЛ, 12ЗП, определяется в соответствии со следующим выражением:
FK=KE·KT·FK0.
Между тем, составляющая FK постоянной силы, которую должен генерировать каждый из двух исполнительных механизмов 26ПП, 26ЗЛ для переднего правого и заднего левого колес 12ПП, 12ЗЛ, определяется в соответствии со следующим выражением:
FK=-KE·KT·FK0.
На фиг. 25 представлена временная диаграмма, схематически иллюстрирующая изменение - при определенном условии - составляющей FK постоянной силы для каждого из исполнительных механизмов 26ПЛ, 26ЗП, расположенных в переднем левом и заднем правом колесах 12ПЛ, 12ЗП, изменение составляющей FK постоянной силы для каждого из исполнительных механизмов 26ПП, 26ЗЛ, расположенных в переднем правом и заднем левом колесах 12ПП, 12ЗЛ, и изменение высоты транспортного средства в зависимости от времени t, указанного вдоль абсциссы временной диаграммы. При условии, указанном на этой временной диаграмме, состояние движения транспортного средства последовательно переключается во время управления в состоянии высокого уровня зарядки, осуществляемого перед переключением управления исполнительным механизмом 26 с управления в состоянии высокого уровня зарядки на управление в нормальном состоянии в определенный момент времени. В частности, во время управления в состоянии высокого уровня зарядки транспортное средство находится в состоянии нормального движения, состоянии движения по дороге, находящейся в плохом состоянии, состоянии нормального движения и состоянии движения с большой скоростью, наступающими в этом порядке описания, по прошествии времени. Как можно понять из чертежа, когда автомобиль движется по дороге, находящейся в плохом состоянии, такой как дорога с колдобинами, при осуществлении управления в состоянии высокого уровня зарядки посредством предлагаемой системы 220, каждый из всех четырех исполнительных механизмов 26 вынужден генерировать постоянную силу, действующую в направлении отскока, чтобы увеличить высоту транспортного средства во избежание контакта кузова транспортного средства с дорожным покрытием или аналогичных неприятностей. Когда транспортное средство движется с высокой скоростью, каждый из всех четырех исполнительных механизмов 26 вынужден генерировать постоянную силу, действующую в направлении подскока, чтобы уменьшить высоту транспортного средства с целью повышения устойчивости движения транспортного средства. Кроме того, когда транспортное средство движется в состоянии нормального движения, каждый из двух исполнительных механизмов 26ПЛ, 26ЗП вынужден генерировать постоянную силу, действующее в направлении подскока, а каждый из двух исполнительных механизмов 26ПП, 26ЗЛ вынужден генерировать постоянную силу, действующую в направлении отскока, так что все исполнительны механизмы 26 генерируют соответствующие постоянные силы, а высота транспортного средства при этом поддерживается неизменной за счет использования большой крутильной жесткости кузова транспортного средства. В предлагаемой системе 220 подвески во время осуществления управления в состоянии высокого уровня зарядки электрическая мощность аккумуляторной батареи 130 эффективно потребляется за счет генерирования постоянной силы, а высота транспортного средства изменяется в зависимости от состояния движения транспортного средства.
3. Программа управления исполнительным механизмом
В предлагаемой системе 220 подвески управление исполнительным механизмом осуществляется, по существу, так же, как управление исполнительным механизмом в вышеописанной системе 10 подвески. Управление исполнительным механизмом осуществляется в соответствии с программой управления исполнительным механизмом, показанной на блок-схеме последовательности операций согласно фиг. 26. Эта программа управления осуществляется с повторениями контроллером 160 на коротком интервале времени (например, несколько десятков миллисекунд), а выключатель зажигания транспортного средства при этом находится во включенном состоянии. Далее, со ссылками на блок-схему последовательности операций, показанную на упомянутом чертеже, будет приведено описание этой программы управления. Отметим, что при управлении исполнительным механизмом такие же процедуры, как осуществляемые при управлении исполнительным механизмом системы 10 подвески, описаны не будут, или будут описаны упрощенным образом.
Программа управления исполнительным механизмом выполняется для каждого из исполнительных механизмов 26 соответствующего узла 222 пружины и амортизатора, предусмотренных для соответствующих четырех колес 12. В нижеследующем описании, для упрощения описания будут описаны процедуры, выполняемые для одного из исполнительных механизмов 26 в соответствии с этой программой. Вместе с тем, в обозначение исполнительного механизма 26 введено в качестве суффикса указательное обозначение, характеризующее положение колеса, в случаях, где требуется пояснить, которому из четырех колес соответствует обозначаемый исполнительный механизм 26. При выполнении процедур в соответствии с данной программой, сначала подпрограмма определения нормальных составляющих силы исполнительного механизма, показанная на блок-схеме последовательности операций согласно фиг. 16, выполняется таким же образом, как подпрограмма определения нормальных составляющих силы исполнительного механизма в системе 10 подвески. Затем определяют, какое из управления в нормальном состоянии и управления в состоянии высокого уровня зарядки следует осуществлять. Процедура этого определения выполняется таким же образом, как процедура упомянутого определения того, какое из управления в нормальном состоянии и управления в состоянии высокого уровня зарядки следует осуществлять, в системе 10 подвески. Когда управление в нормальном состоянии выбрано для осуществления в результате упомянутого определения, прибавляют предварительно определенное время Δt к времени tE осуществления управления в нормальном состоянии для измерения времени осуществления управления в нормальном состоянии, а время tS осуществления управления в состоянии высокого уровня зарядки сбрасывают в 0 (нуль) для окончания измерения времени осуществления управления в состоянии высокого уровня зарядки. С другой стороны, когда управление в состоянии высокого уровня зарядки выбрано для осуществления в результате упомянутого определения, прибавляют предварительно определенное время Δt к времени tS осуществления управления в состоянии высокого уровня зарядки для измерения времени осуществления управления в состоянии высокого уровня зарядки, а время tE осуществления управления в нормальном состоянии сбрасывают в 0 (нуль) для окончания измерения времени осуществления управления в нормальном состоянии. После того, как одна из этих процедур выполнена, выполняют подпрограмму определения постоянной силы, показанную на блок-схеме последовательности операций согласно фиг. 27.
При выполнении подпрограммы определения постоянной силы, определяют, равно 0 (нулю) время tS осуществления управления в состоянии высокого уровня зарядки, или нет, чтобы определить, какое из управления в нормальном состоянии и управления в состоянии высокого уровня зарядки следует осуществлять. Когда время tS осуществления управления в состоянии высокого уровня зарядки равно 0 (нулю), составляющую FK постоянной силы задают равной 0 (нулю) для осуществления управления в нормальном состоянии. Когда время tS осуществления управления в состоянии высокого уровня зарядки не равно 0 (нулю), определяют направление постоянной силы для осуществления управления в состоянии высокого уровня зарядки. Как описано выше, когда определено, что состояние дорожного покрытия является плохим, направление постоянной силы делают соответствующим направлению отскока. Когда скорость v транспортного средства равна пороговой скорости v1 или превышает ее, направление постоянной силы делают соответствующим направлению подскока. Далее, когда определено, что состояние дорожного покрытия не является плохим, а также что скорость v транспортного средства меньше, чем пороговая скорость v1, определяют, какой из исполнительных механизмов 26 следует подвергнуть процедурам, выполняемым в соответствии с данной программой. Когда определено, что процедуры данной программы должны быть выполнены или превышает ее, направление постоянной силы делают соответствующим направлению подскока. С другой стороны, когда определено, что процедуры данной программы должны выполняться для исполнительного механизма 26ПЛ переднего левого колеса 12ПЛ или исполнительного механизма 26ЗП заднего правого колеса 12ЗП, направление постоянной силы делают соответствующим направлению отскока. После определения направления постоянной силы таким образом, определяют составляющую FK постоянной силы так, как описано выше.
После определения составляющей FK постоянной силы определяют, происходит резкое изменение постоянной силы, или нет. Когда определено, что резкое изменение постоянной силы происходит, выполняют процедуру постепенного изменения составляющей FK постоянной силы и составляющей FKP постоянной силы (именуемой далее «предыдущей составляющей постоянной силы», где это уместно), которая была определена при последнем выполнении данной программы. В частности, определяют, равно ли абсолютное значение разности ΔFK (ΔFK=FK - FKP) между составляющей FK постоянной силы и предыдущей составляющей FKP постоянной силы пороговому значению ΔFK0 либо превышает его, или нет. Когда абсолютное значение ΔFK равно пороговому значению ΔFK0 либо превышает его, определяют, что постоянная сила резко изменяется. В этом случае, чтобы постепенно изменить составляющую FK постоянной силы, осуществляют компенсацию этой составляющей FK постоянной силы в соответствии со следующим выражением:
FK=FKP+[sign(ΔFK)]·ΔFK1.
В этом выражении ΔFK1 - это компенсация, которая предварительно задана имеющей малую величину, а sign(ΔFK) - это функция, указывающая знак ΔFK. То есть, когда составляющая FK постоянной силы больше, чем предыдущая составляющая FKP постоянной силы, sign(ΔFK) указывает положительный знак. Когда составляющая FK постоянной силы меньше, чем предыдущая составляющая FKP постоянной силы, sign(ΔFK) указывает отрицательный знак. Следовательно, когда составляющая FK постоянной силы больше, чем предыдущая составляющая FKP постоянной силы, составляющая FK постоянной силы компенсируется с достижением значения, которое получается путем прибавления компенсационной составляющей ΔFK1 к предыдущей составляющей FKP постоянной силы. Когда составляющая FK постоянной силы меньше, чем предыдущая составляющая FKP постоянной силы, составляющая FK постоянной силы компенсируется с достижением значения, которое получается путем вычитания компенсационной составляющей ΔFK1 из предыдущей составляющей FKP постоянной силы. Составляющую FK постоянной силы постепенно изменяют посредством компенсационной составляющей ΔFK1, которая предварительно задана имеющей малую величину, так что это постепенное изменение оказывается незаметным. В данной программе, вышеописанная процедура постепенного изменения осуществляется при переключении управления исполнительным механизмом между управлением в нормальном состоянии и управлением в состоянии высокого уровня зарядки и при изменении направления постоянной силы в ответ на изменение состояния движения транспортного средства. С другой стороны, когда определено, что абсолютное значение ΔFK меньше, чем пороговое значение ΔFK0, определяют, что резкое изменение постоянной силы не происходит, вследствие чего составляющая FK постоянной силы не компенсируется.
После выполнения подпрограммы определения постоянной силы, определяют целевую силу FA исполнительного механизма. В данной программе, составляющая FK постоянной силы задается равной 0 (нулю) в подпрограмме определения постоянной силы, когда осуществляется управление в нормальном состоянии. Поэтому независимо от того, какое из управления в нормальном состоянии и управления в состоянии высокого уровня зарядки осуществляется, целевую силу FA исполнительного механизма определяют как сумму составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, и составляющей FK постоянной силы. После определения целевой силы FA исполнительного механизма, выполняется подпрограмма управления определением подачи/генерирования электрической мощности и работой электрического двигателя, показанная на блок-схеме последовательности операций согласно фиг. 21(а). Процедуры этой подпрограммы выполняются таким же образом, как процедуры подпрограммы управления определением подачи/генерирования электрической мощности и работой электрического двигателя в вышеописанной системе 10 подвески. При выполнении этих процедур, управляющий сигнал, соответствующий определенной силе FA исполнительного механизма, подается на инвертор 162 и устройство 166 переменных резисторов, а управление работой электродвигателя 54 осуществляется таким образом, что генерируется определенная целевая сила FA исполнительного механизма. Затем выполняется подпрограмма управления электрическим разрядником, показанная на блок-схеме последовательности операций согласно фиг. 21(b). Процедуры этой подпрограммы выполняются таким же образом, как процедуры подпрограммы управления электрическим разрядником в вышеописанной системе 10 подвески. При выполнении этих процедур, аккумуляторная батарея 130 соединена с разрядным резисторным устройством 188, когда на осуществление управления в состоянии высокого уровня зарядки накладывается ограничение, вследствие чего разрядное резистивное устройство 188 потребляет электрическую энергию аккумуляторной батареи 130. Один цикл осуществления данной программы завершается при завершении выполнения подпрограммы управления электрическим разрядником.
4. Функциональная конструкция контроллера
Контроллер предлагаемой системы 220 подвески, функционирующий при выполнении вышеописанных программ управления исполнительным механизмом, можно считать имеющим функциональные конструкции, описываемые ниже, ввиду процедур, проводимых при выполнении этих программ управления. Контроллер предлагаемой системы 220 подвески имеет функциональные модули, по существу, такие же, как модуль 204 определения нормальных составляющих силы исполнительного механизма, модуль 210 управления подачей и/или генерированием электрической мощности и модуль 212 управления электрическим разрядником, которые входят в состав контроллера 160 системы 10 подвески. Контроллер предлагаемой системы 220 подвески дополнительно имеет модуль управления в состоянии высокого уровня зарядки в качестве функционального модуля, конфигурация которого обеспечивает осуществление управления в состоянии высокого уровня зарядки, и модуль управления в нормальном состоянии в качестве функционального модуля, конфигурация которого обеспечивает осуществление управления в нормальном состоянии. Модуль управления в состоянии высокого уровня зарядки оснащен модулем определения составляющей постоянной силы в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур подпрограммы управления в состоянии высокого уровня зарядки, т.е. в качестве функционального модуля, конфигурация которого обеспечивает определение составляющей FK постоянной силы. Модуль определения составляющей постоянной силы оснащен: модулем автоматической коррекции высоты транспортного средства в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур этапов S122 - S126, т.е. в качестве функционального модуля, конфигурация которого обеспечивает коррекцию высоты транспортного средства в зависимости от состояния дорожного покрытия и/или скорости движения транспортного средства; и модулем постепенного изменения составляющей постоянной силы в качестве модуля, конфигурация которого обеспечивает выполнение процедур этапов S127 и S128, т.е. в качестве функционального модуля, конфигурация которого обеспечивает постепенное изменение составляющей FK постоянной силы.
Третий вариант осуществления изобретения
1. Конструкция системы подвески
Фиг. 28 схематически иллюстрирует систему 250 подвески. Поскольку система 250 подвески является, по существу, такой же, как система 220 подвески, за исключением различных датчиков, необходимых для осуществления управлений, те же ссылочные позиции, которые использовались в вышеописанном варианте осуществления, будут использоваться для обозначения общих конструктивных элементов, а описание этих элементов опущено или упрощено.
2. Управление с коррекцией высоты транспортного средства
В предлагаемой системе 250 все четыре исполнительных механизма 26, предусмотренные для соответствующих четырех колес 12, заставляются генерировать постоянные силы в одном и том же направлении для активного изменения высоты транспортного средства. Если описывать подробнее, то четыре исполнительных механизма 26 заставляют генерировать постоянные силы, действующие в направлении отскока, для увеличения высоты транспортного средства и заставляют генерировать постоянные силы, действующие в направлении подскока, для уменьшения высоты транспортного средства. То есть, в предлагаемой системе 250 управление с коррекцией высоты транспортного средства осуществляется путем управления постоянными силами. Отметим, что предлагаемая система 250 подвески оснащена выключателем 254 изменения высоты транспортного средства, который является, по существу, таким же, как выключатель 154 изменения высоты транспортного средства в вышеописанной системе 10 подвески, и что в качестве уровней высоты транспортного средства имеются уровни большой высоты транспортного средства, средней высоты транспортного средства и малой высоты транспортного средства, каждый из которых выбирается посредством срабатывания выключателя 254 изменения высоты транспортного средства.
При управлении коррекций высоты транспортного средства, в принципе, высота транспортного средства, выбираемая по намерению оператора транспортного средства, задается в качестве целевой высоты транспортного средства, и высота транспортного средства корректируется путем генерирования постоянной силы, соответствующего целевой высоте транспортного средства. Если описывать подробнее, то 160 контроллер сохраняет соответствующее высоте транспортного средства значение FKα составляющей постоянной силы, которое соответствует целевой высоте транспортного средства, так что коррекция высоты транспортного средства осуществляется с достижением целевой высоты транспортного средства за счет того, что каждый из четырех исполнительных механизмов 26 заставляет генерировать постоянная сила, соответствующая высоте транспортного средства, которая соответствует значению FKα составляющей постоянной силы, соответствующему высоте транспортного средства. Если описывать конкретно, то когда целевая высота транспортного средства является большой высотой транспортного средства, составляющая FK постоянной силы, входящая в силу исполнительного механизма, генерируемую каждым из четырех исполнительных механизмов 26, задается равной значению FKH составляющей постоянной силы, соответствующему большой высоте транспортного средства, так что высота транспортного средства становится большой высотой транспортного средства при генерировании постоянной силы, соответствующей значению FKH составляющей постоянной силы, соответствующему большой высоте транспортного средства, и действующей в направлении отскока. Когда целевая высота транспортного средства является малой высотой транспортного средства, составляющая FK постоянной силы, входящая в силу исполнительного механизма, генерируемую каждым из четырех исполнительных механизмов 26, задается равной значению -FKL составляющей постоянной силы, соответствующему малой высоте транспортного средства, так что высота транспортного средства становится малой высотой транспортного средства при генерировании постоянной силы, соответствующей значению -FKL составляющей постоянной силы, соответствующему малой высоте транспортного средства, и действующей в направлении подскока. Когда целевая высота транспортного средства является средней высотой транспортного средства, составляющая FK постоянной силы, входящая в силу исполнительного механизма, генерируемую каждым из четырех исполнительных механизмов 26, задается равной 0 (нулю), так что высота транспортного средства становится средней высотой транспортного средства при отсутствии генерирования постоянной силы.
3. Управление в состоянии высокого уровня зарядки
В предлагаемой системе 250 подвески, управление исполнительным механизмом 26 осуществляется так, что генерируется целевая сила FA исполнительного механизма, которая определяется как сумма составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, и составляющей FK постоянной силы. За счет управления исполнительным механизмом 26 управление с демпфированием вибрации, управление с ограничением крена, управление с ограничением продольного наклона и управление с коррекцией высоты транспортного средства осуществляются одинаково. Кроме того, в течение состояния высокого уровня зарядки в качестве состояния зарядки аккумуляторной батареи 130, даже когда высота транспортного средства задана как средняя высота транспортного средства, исполнительные механизмы 26 заставляют генерировать соответствующие постоянные силы, чтобы принудительно установить состояние генерирования постоянной силы. То есть, подобно вышеописанной системе 220 подвески, каждый из двух исполнительных механизмов 26 для колес 12, находящихся в соответствующих положениях, которые расположены по диагонали друг к другу, предназначены для генерирования постоянной силы, действующего в направлении подскока, а каждый из других двух исполнительных механизмов 26 предназначен для генерирования постоянной силы, действующего в направлении отскока, так что средняя высота транспортного средства поддерживается за счет использования большой крутильной жесткости кузова транспортного средства. Если описывать конкретно, то каждый из двух исполнительных механизмов 26ПЛ, 26ЗП, предусмотренных для переднего левого и заднего правого колес 12ПЛ, 12ЗП, предназначен для генерирования составляющей FK постоянной силы, которая определяется в соответствии со следующим выражением:
FK=KE·FK0.
Между тем, каждый из других двух исполнительных механизмов 26ПП, 26ЗЛ, предусмотренных для переднего правого и заднего левого колес 12ПП, 12ЗЛ, предназначен для генерирования составляющей FK постоянной силы, которая определяется в соответствии со следующим выражением:
FK=-KE·FK0.
В этом выражении FK0 представляет собой эталонное постоянная сила, которое предварительно задается имеющим определенную величину, а KE представляет собой коэффициент усиления, основанный на уровне зарядки аккумуляторной батареи 130, подобно коэффициенту усиления, использовавшемуся в вышеописанной системе 10 подвески.
4. Управление в состоянии низкого уровня зарядки изобретения
Поскольку состояние генерирования постоянной силы является состоянием, сопровождающим разрядку аккумуляторной батареи 130, существует риск, что состояние зарядки аккумуляторной батареи 130 может стать недостаточно заряженным состоянием, если состояние генерирования постоянной силы устанавливается в течение состояния низкого уровня зарядки в качестве состояния зарядки аккумуляторной батареи 130. Соответственно, в предлагаемой системе 250 осуществление управления с коррекцией высоты транспортного средства запрещается, когда аккумуляторная батарея 130 находится в состоянии низкого уровня зарядки, так что разрядка аккумуляторной батареи ограничивается настолько, что состояние генерирования постоянной силы не устанавливается. Кроме того, поскольку некоторое количество электрической мощности потребляется из аккумуляторной батареи 130 при генерировании силы, ограничивающей крен, и силы, ограничивающей продольный наклон, в соответствующих управлении с ограничением крена и управлении с ограничением продольного наклона, как описано выше, осуществления управления с ограничением крена и управления с ограничением продольного наклона можно запретить в течение состояния низкого уровня зарядки аккумуляторной батареи 130, чтобы ограничить разрядку аккумуляторной батареи 130. Соответственно, в предлагаемой системе 250 подвески управление в состоянии низкого уровня зарядки осуществляется в течение состояния низкого уровня зарядки как состояния зарядки аккумуляторной батареи 130. При осуществлении управления в состоянии низкого уровня зарядки, осуществления управления с ограничением крена и управления с ограничением продольного наклона, а также осуществления управления с коррекцией высоты транспортного средства запрещены, так что осуществляется только управление с демпфированием вибрации.
5. Программа управления исполнительным механизмом
В предлагаемой системе 250 подвески управление исполнительным механизмом осуществляется, по существу, так же, как управление исполнительным механизмом в вышеописанных системе 10 подвески и системе 220 подвески. Управление исполнительным механизмом осуществляется в соответствии с программой управления исполнительным механизмом, показанной на блок-схеме последовательности операций согласно фиг. 29. Эта программа управления осуществляется с повторениями контроллером 160 на коротком интервале времени (например, несколько десятков миллисекунд), а выключатель зажигания транспортного средства при этом находится во включенном состоянии. Далее, со ссылками на блок-схему последовательности операций, показанную на упомянутом чертеже, будет приведено описание этой программы управления. Отметим, что при управлении исполнительным механизмом такие же процедуры, как осуществляемые при управлении исполнительным механизмом системы 10 подвески или системы 220 подвески, описаны не будут, или будут описаны упрощенным образом.
Программа управления исполнительным механизмом выполняется для каждого из исполнительных механизмов 26 соответствующего узла 222 пружины и амортизатора, предусмотренных для соответствующих четырех колес 12. В нижеследующем описании, для упрощения описания будут описаны процедуры, выполняемые для одного из исполнительных механизмов 26 в соответствии с этой программой. Вместе с тем, в обозначение исполнительного механизма 26 введено в качестве суффикса указательное обозначение, характеризующее положение колеса, в случаях, где требуется пояснить, которому из четырех колес соответствует обозначаемый исполнительный механизм 26. При выполнении процедур в соответствии с данной программой, сначала подпрограмма определения нормальных составляющих силы исполнительного механизма, показанная на блок-схеме последовательности операций согласно фиг. 16, выполняется таким же образом, как подпрограмма определения нормальных составляющих силы исполнительного механизма в системе 10 подвески. Посредством процедур, выполняемых в соответствии с этой подпрограммой, определяют составляющую FG силы исполнительного механизма, направленную так, что она обеспечивает демпфирование вибрации, составляющую FR силы исполнительного механизма, направленную так, что она обеспечивает ограничение крена, составляющую FP силы исполнительного механизма, направленную так, что она обеспечивает ограничение продольного наклона. Затем подпрограмма определения целевой высоты транспортного средства, показанная на блок-схеме последовательности операций согласно фиг. 14, выполняется таким же образом, как подпрограмма определения целевой высоты транспортного средства в системе 10 подвески. Посредством процедур, выполняемых в соответствии с этой подпрограммой, определяют целевую высоту транспортного средства при управлении с коррекцией высоты транспортного средства.
После выполнения подпрограммы определения целевой высоты транспортного средства определяют, равен ли уровень Е зарядки аккумуляторной батареи 130 первому пороговому уровню Е1 зарядки или превышает его. Когда уровень Е зарядки ниже, чем первый пороговый уровень Е1 зарядки, определяют равен ли уровень Е зарядки аккумуляторной батареи 130 второму пороговому уровню Е2 зарядки или оказывается ниже него. Когда уровень Е зарядки равен второму пороговому уровню Е2 зарядки или оказывается ниже него, целевую силу FA исполнительного механизма задают равной составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, для осуществления управления в состоянии низкого уровня зарядки. Когда уровень Е зарядки равен первому пороговому уровню Е1 зарядки или превышает его, определяют, является ли целевая высота транспортного средства, определенная в подпрограмме определения целевой высоты транспортного средства, средней высотой транспортного средства, или нет. Когда целевая высота транспортного средства является средней высотой транспортного средства, определяют, какой из исполнительных механизмов 26 следует подвергнуть процедурам, выполняемым в соответствии с данной программой, как и в вышеописанной системе 220 подвески. В соответствии с этим определением, определяют постоянную силу, а также определяют составляющую FK постоянной силы так, как описано выше. Когда уровень Е зарядки равен первому пороговому уровню Е1 зарядки или превышает его, и определено, что целевая высота транспортного средства не является средней высотой транспортного средства, или когда уровень Е зарядки превышает второй пороговый уровень Е2 зарядки, определяют, какой из уровней высоты транспортного средства следует задать как целевой уровень высоты транспортного средства. Когда целевая высота транспортного средства является большой высотой транспортного средства, составляющую FK постоянной силы задают равной значению FKH составляющей постоянной силы, соответствующему большой высоте транспортного средства. Когда целевая высота транспортного средства является малой высотой транспортного средства, составляющую FK постоянной силы задают равной значению -FKH составляющей постоянной силы, соответствующему малой высоте транспортного средства. Когда целевая высота транспортного средства является средней высотой транспортного средства, составляющую FK постоянной силы задают равной 0 (нулю).
После определения составляющей FK постоянной силы выполняются такие же процедуры, как процедуры определения резкого изменения постоянной силы и постепенного изменения составляющей FK постоянной силы в вышеописанной системе 220 подвески. То есть, определяют, происходит резкое изменение постоянной силы, или нет, а потом постепенно изменяют составляющую FK постоянной силы, когда определено, что резкое изменение постоянной силы происходит. Затем определяют целевую силу FA исполнительного механизма как сумму определенных составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, и составляющей FK постоянной силы. После определения целевой силы FA исполнительного механизма таким образом или после определения целевой силы FA при вышеописанном управлении в состоянии низкого уровня зарядки, выполняется подпрограмма управления определением подачи/генерирования электрической мощности и работой электрического двигателя, показанная на блок-схеме последовательности операций согласно фиг. 21(а). Процедуры этой подпрограммы выполняются таким же образом, как процедуры подпрограммы управления определением подачи/генерирования электрической мощности и работой электрического двигателя в вышеописанной системе 10 подвески. При выполнении этих процедур, управляющий сигнал, соответствующий определенной силе FA исполнительного механизма, подается на инвертор 162 и устройство 166 переменных резисторов, а управление работой электродвигателя 54 осуществляется таким образом, что генерируется определенная целевая сила FA исполнительного механизма. Один цикл осуществления данной программы завершается при завершении выполнения этой подпрограммы. В данной программе не выполняются процедуры осуществления с прерываниями управления в состоянии высокого уровня зарядки. Вместе с тем, выполнение таких процедур возможно таким же образом, как в вышеописанных системе 10 подвески и системе 220 подвески.
6. Функциональная конструкция контроллера
Контроллер предлагаемой системы 250 подвески, функционирующий при выполнении вышеописанных программ управления исполнительным механизмом, можно считать имеющим функциональные конструкции, описываемые ниже, ввиду процедур, проводимых при выполнении этих программ управления. Контроллер предлагаемой системы 250 подвески имеет функциональные модули, по существу, такие же, как модуль 204 определения нормальных составляющих силы исполнительного механизма и модуль 210 управления подачей и/или генерированием электрической мощности, которые входят в состав контроллера 160 системы 10 подвески. Контроллер предлагаемой системы 250 подвески дополнительно имеет модуль управления в состоянии низкого уровня зарядки в качестве функционального модуля, конфигурация которого обеспечивает осуществление управления в состоянии низкого уровня зарядки, модуль управления в состоянии высокого уровня зарядки в качестве функционального модуля, конфигурация которого обеспечивает осуществление управления в состоянии высокого уровня зарядки, и модуль управления в нормальном состоянии в качестве функционального модуля, конфигурация которого обеспечивает осуществление управления в нормальном состоянии. Модуль управления в состоянии высокого уровня зарядки оснащен: модулем коррекции высоты транспортного средства в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур этапов S136-S143, т.е. в качестве функционального модуля, конфигурация которого обеспечивает коррекцию высоты транспортного средства благодаря постоянной силе; и модулем постепенного изменения составляющей постоянной силы в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур этапов S145 и S146, т.е. в качестве функционального модуля, конфигурация которого обеспечивает постепенное изменение составляющей FK постоянной силы.
Четвертый вариант осуществления изобоетения
1. Конструкция системы подвески
Поскольку система подвески транспортного средства согласно данному варианту осуществления оснащена, по существу, такими же конструктивными элементами, как конструктивные элементы вышеописанной системы 10 подвески транспортного средства согласно первому варианту осуществления, те же позиции, которые использовались в вышеописанном варианте осуществления, будут использоваться для обозначения конструктивных элементов, идентичных конструктивным элементам системы 10 подвески, а описание этих элементов опущено или упрощено. Кроме того, иллюстрация системы подвески согласно данному варианту осуществления опущена.
2. Управление в состоянии высокого уровня зарядки
В данной системе направления постоянных сил соответствующих четырех исполнительных элементов 26 не одинаковы друг с другом как при управлении в состоянии высокого уровня зарядки, осуществляемом в вышеописанной системе 10 подвески. Вместо этого в данной системе два из четырех исполнительных механизмов 26 для колес 12, находящихся в соответствующих положениях, которые расположены по диагонали друг к другу, предназначены для генерирования соответствующих постоянных сил исполнительных механизмов таким образом, что генерируемые постоянные силы исполнительных механизмов действуют в направлении подскока в качестве направления постоянной силы, а другие два из упомянутых четырех исполнительных механизмов 26 предназначены для генерирования соответствующих постоянных сил исполнительных механизмов таким образом, что генерируемые постоянные силы исполнительных механизмов действуют в направлении отскока в качестве направления постоянной силы. Поэтому можно заставить исполнительные механизмы 26 генерировать соответствующие постоянные силы без изменения высоты транспортного средства за счет того, что вызывают взаимодействие генерируемых постоянных сил взаимодействовать друг с другом, образуя крутящую силу, действующую на кузов транспортного средства, а именно, за счет использования большой крутильной жесткости кузова транспортного средства. Кроме того, в данной системе крутящая сила, крутящая кузов транспортного средства, действует в направлении, которое периодически изменяется, что позволяет избежать кручения кузова транспортного средства только в одном постоянном направлении. Более того, постоянная сила постепенно изменяется, так что предотвращается ее резкое изменение при изменении направления, в котором происходит кручение кузова транспортного средства.
Если описывать конкретно, то составляющая FK постоянной силы, которую должен генерировать каждый из двух исполнительных механизмов 26ПЛ, 26ЗП для переднего левого и заднего правого колес 12ПЛ, 12ЗП, определяется в соответствии со следующим выражением:
FK=KE·fW(tS)·FK0.
Между тем, составляющая FK постоянной силы, которую должен генерировать каждый из двух исполнительных механизмов 26ПП, 26ЗЛ для переднего правого и заднего левого колес 12ПП, 12ЗЛ, определяется в соответствии со следующим выражением:
FK=-KE·fW(tS)·FK0.
В вышеуказанных выражениях FK0 представляет собой эталонное постоянная сила, которое предварительно задается имеющим определенную величину, а KE представляет собой такой же коэффициент усиления, как тот, который использовался в вышеописанной системе 10 подвески, т.е. коэффициент усиления, основанный на количестве заряда аккумуляторной батареи 130. Кроме того, fW(tS) - это функция, основанная на истекшем времени. Как показано на фиг. 30, эта функция fW(tS) периодически изменяется по закону синусоиды между -1 и +1, что приводит к периодическому изменению направления постоянной силы между направлением отскока и направлением подскока и к предотвращению резкого изменения постоянной силы при изменении направления постоянной силы.
Кроме того, управление в данной системе осуществляется, по существу, так же, как управление с коррекцией высоты транспортного средства, осуществлявшееся в системе 10 подвески. В данной системе не проводится процедура, проводившаяся при переключении между нормальным состоянием и состоянием высокого уровня разрядки, которая осуществляется для постепенного изменения постоянной силы в вышеописанной системе 10 подвески, поскольку высота транспортного средства, по существу, не изменяется постоянной силой в данной системе.
На фиг. 31 представлена временная диаграмма, иллюстрирующая - при определенном условии - изменение составляющей FK постоянной силы исполнительного механизма для каждого из исполнительных механизмов 26ПЛ, 26ЗП, расположенных в соответствующих переднем левом и заднем правом колесах, изменение составляющей FK постоянной силы исполнительного механизма для исполнительных механизмов 26ПП, 26ЗЛ, расположенных в соответствующих переднем правом и заднем левом колесах, и изменение высоты транспортного средства в зависимости от истекшего времени t, указанного вдоль абсциссы временной диаграммы. При условии, указанном на этой временной диаграмме, управление каждым исполнительным механизмом 26 переключается с управления в состоянии высокого уровня зарядки на управление в нормальном состоянии в определенный момент времени и переключается с управления в нормальном состоянии на управление в состоянии высокого уровня зарядки в последующий момент времени. Как явствует из чертежа, при управлении в состоянии высокого уровня зарядки, осуществляемом в предлагаемой системе 220, направление постоянной силы двух исполнительных механизмов 26ПЛ, 26ЗП периодически изменяется между направлением отскока и направлением подскока, а направление постоянной силы двух исполнительных механизмов 26ПП, 26ЗЛ делается противоположным направлению постоянной силы вышеописанных двух исполнительных механизмов 26ПЛ, 26ЗП, так что постоянные силы, генерируемые соответствующими четырьмя исполнительными механизмами 26, всегда уравнены друг с другом по величине. В данной системе электрическая мощность аккумуляторной батареи 130 эффективно потребляется без изменения высоты транспортного средства постоянными силами, поскольку вызывается ситуация, в которой постоянные силы образуют крутящую силу, действующую на транспортное средство, изменяя направление, в котором крутящая сила действует на транспортное средство.
3. Программы управления
В предлагаемой системе 250 подвески управление с коррекцией высоты транспортного средства и управление исполнительным механизмом являющиеся, по существу, такими же, как те, которые осуществляются в вышеописанной системе 10 подвески, осуществляются одновременно. Управление с коррекцией высоты транспортного средства осуществляется в соответствии с программой управления с коррекцией высоты транспортного средства, показанной на блок-схеме последовательности операций согласно фиг. 13. Эта программа управления осуществляется с повторениями контроллером 146 на коротком интервале времени (например, несколько десятков миллисекунд), а выключатель зажигания транспортного средства при этом находится во включенном состоянии. Управление исполнительным механизмом осуществляется в соответствии с программой управления исполнительным механизмом, показанной на блок-схеме последовательности операций согласно фиг. 32. Эта программа управления осуществляется с повторениями контроллером 160 на коротком интервале времени (например, несколько десятков миллисекунд), а выключатель зажигания транспортного средства при этом находится во включенном состоянии. Поскольку управление с коррекцией высоты транспортного средства описано в изложенных выше описаниях первого варианта осуществления, описание этого управления здесь опущено. Что касается управления исполнительным механизмом, то те же процедуры, которые выполнялись при управлении исполнительным механизмом системы 10 подвески описаны не будут, или будут описаны упрощенным образом. Ниже будет приведено краткое описание управления исполнительным механизмом со ссылками на блок-схему последовательности операций, показанную на рассматриваемом чертеже.
Программа управления исполнительным механизмом выполняется для каждого из исполнительных механизмов 26 соответствующего узла 20 пружины и амортизатора, предусмотренных для соответствующих четырех колес 12. В нижеследующем описании, для упрощения описания будут описаны процедуры, выполняемые для одного из исполнительных механизмов 26 в соответствии с этой программой. Вместе с тем, в обозначение исполнительного механизма 26 введено в качестве суффикса указательное обозначение, характеризующее положение колеса, в случаях, где требуется пояснить, которому из четырех колес соответствует обозначаемый исполнительный механизм 26. При выполнении процедур в соответствии с данной программой, сначала подпрограмма определения нормальных составляющих силы исполнительного механизма, показанная на блок-схеме последовательности операций согласно фиг. 16, выполняется таким же образом, как подпрограмма определения нормальных составляющих силы исполнительного механизма в системе 10 подвески. Посредством процедур, выполняемых в соответствии с этой подпрограммой, определяют составляющую FG силы исполнительного механизма, направленную так, что она обеспечивает демпфирование вибрации, составляющую FR силы исполнительного механизма, направленную так, что она обеспечивает ограничение крена, составляющую FP силы исполнительного механизма, направленную так, что она обеспечивает ограничение продольного наклона.
Затем определяют, равен ли уровень Е зарядки аккумуляторной батареи 130 первому пороговому уровню Е1 зарядки или превышает его, а потом прибавляют предварительно определенное время Δt к времени tS осуществления управления в состоянии высокого уровня зарядки, когда уровень Е зарядки равен первому пороговому уровню Е1 зарядки или превышает его. После этого определяют, какой из исполнительных механизмов 26 следует подвергнуть процедурам, выполняемым в соответствии с данной программой, и определяют составляющую FK постоянной силы так, как описано выше, в соответствии с упомянутым определением. Затем определяют целевую силу FA исполнительного механизма как сумму определенных составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, и составляющей FK постоянной силы.
Когда уровень Е зарядки ниже, чем первый пороговый уровень Е1 зарядки, целевую силу FA исполнительного механизма определяют как сумму определенных составляющей определенных составляющей FG силы исполнительного механизма, направленной так, что она обеспечивает демпфирование вибрации, составляющей FR силы исполнительного механизма, направленной так, что она обеспечивает ограничение крена, и составляющей FP силы исполнительного механизма, направленной так, что она обеспечивает ограничение продольного наклона, после того, как время tS осуществления управления в состоянии высокого уровня зарядки сброшено в 0 (нуль).
После определения таким образом целевой силы FA исполнительного механизма, выполняется подпрограмма управления определением подачи/генерирования электрической мощности и работой электрического двигателя, показанная на блок-схеме последовательности операций согласно фиг. 21(а). Процедуры этой подпрограммы выполняются таким же образом, как процедуры подпрограммы управления определением подачи/генерирования электрической мощности и работой электрического двигателя в вышеописанной системе 10 подвески. При выполнении этих процедур, управляющий сигнал, соответствующий определенной силе FA исполнительного механизма, подается на инвертор 162 и устройство 166 переменных резисторов, а управление работой электродвигателя 54 осуществляется таким образом, что генерируется определенная целевая сила FA исполнительного механизма. Один цикл осуществления данной программы завершается при завершении выполнения этой подпрограммы.
4. Функциональные конструкции контроллеров
Контроллер электронного блока коррекцией высоты транспортного средства (ЭБУКВТС) и контроллер электронного блока управления исполнительным механизмом (ЭБУИМ) предлагаемой системы подвески, функционирующие при выполнении вышеописанных программ управления, можно считать имеющим функциональные конструкции, описываемые ниже, ввиду процедур, проводимых при выполнении этих программ управления. Контроллер ЭБУКВТС имеет функциональные модули, по существу, такие же, как модуль 200 определения целевой высоты транспортного средства и модуль 202 коррекции высоты транспортного средства, которые входят в состав контроллера 146 системы 10 подвески. Контроллер ЭБУИМ имеет функциональные модули, по существу, такие же, как модуль 204 определения нормальных составляющих силы исполнительного механизма и модуль 210 управления подачей и/или генерированием электрической мощности, которые входят в состав контроллера 160 системы 10 подвески. Кроме того, контроллер ЭБУИМ дополнительно имеет: модуль управления в состоянии высокого уровня зарядки в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур этапов S153-S157, т.е. в качестве функционального модуля, конфигурация которого обеспечивает осуществление управления в состоянии высокого уровня зарядки; и модуль управления в нормальном состоянии в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур этапов S158 и S159, т.е. в качестве функционального модуля, конфигурация которого обеспечивает осуществление управления в нормальном состоянии. Отметим, что модуль управления в состоянии высокого уровня зарядки оснащен модулем постепенного изменения направления постоянной силы в качестве функционального модуля, конфигурация которого обеспечивает выполнение процедур этапов S154-S156, т.е. в качестве функционального модуля, конфигурация которого обеспечивает постепенное периодическое изменение направления постоянной силы.
Реферат
Изобретение относится к системам подвески для установления их на транспортном средстве. Система подвески включает в себя: подвесную пружину (28, 224), исполнительный механизм (26) и управляющее устройство (140). Подвесная пружина упруго взаимодействует с кузовом (24) и колесом (12) транспортного средства. Параллельно подвесной пружине расположен исполнительный механизм, имеющий электрический двигатель (54). Электрический двигатель связан с исполняющим механизмом и генерирует управляющую силу подвески, вынуждая сближение кузова транспортного средства и колеса друг с другом и их отдаление друг от друга. Электрический двигатель при необходимости вызывает демпфирующую силу, противодействующую сближению кузова транспортного средства и колеса к и от друг друга. Управляющее устройство (140) обеспечивает управление силой исполнительного механизма посредством управления электрическим двигателем, при этом управляющее устройство обеспечивает генерирование постоянной силы, устанавливаемой контроллером, питаемым от аккумуляторной батареи (130). Конфигурация управляющего устройства обеспечивает управление исполнительным механизмом с учетом состояния зарядки аккумуляторной батареи. Изобретение направлено на повышение работоспособности в процессе практического использования. 19 з.п. ф-лы, 32 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ работы комбинированного электрического транспортного средства (варианты)
Комментарии