Параллельный кинематический механизм с держателями карданного типа - RU2558324C2
Код документа: RU2558324C2
Чертежи







Описание
Область техники
Настоящее изобретение относится к станкам и роботам и, в частности, к параллельным кинематическим механизмам, предназначенным для работы в промышленности, и их держателям карданного типа.
Уровень техники
В описании изобретения по заявке WO 2006/054935 раскрыт параллельный кинематический механизм такого же типа, как и настоящее изобретение. Описанный в указанном документе параллельный кинематический механизм содержит три установочных приспособления, которые могут по отдельности удлиняться и укорачиваться для перемещения позиционирующей головки. Каждое из трех установочных приспособлений соединено с позиционирующей головкой посредством первого шарнира. Кроме того, каждое установочное устройство соединено с основанием посредством универсального шарнира. Позиционирующая головка способна перемещаться в пределах рабочего диапазона в соответствии с маневрированием установочных устройств.
Основание, описанное в указанном документе как известное техническое решение, сконструировано в виде стационарного блочного модуля, в котором смонтирован каждый из трех универсальных шарниров для каждого из трех установочных приспособлений. Указанное основание, также известное как верхняя платформа, сложно изготавливать, а также обрабатывать на станке для получения надлежащих допустимых отклонений в каждом из гнезд для каждого универсального шарнира, что довольно дорого. Кроме того, указанное основание имеет очень большой вес и, следовательно, требует больших затрат на его транспортировку и требует точного монтажа на месте установки механизма. В дополнение ко всему конечный пользователь такого механизма, снабженного указанным основанием, должен организовать интегрирование этого основания в производственную систему, что может оказаться трудной задачей из-за большого объема и веса основания.
Точность перемещения механизмов этого типа существенно зависит от их жесткости, которая, в свою очередь, зависит от числа подшипников и/или имеющихся степеней свободы, а также от способности материалов его деталей минимизировать напряжения кручения и изгибные напряжения в критических направлениях. В описанном параллельном кинематическом механизме каждый универсальный шарнир, монтируемый на основании, требует наличия в основании поверхностей, обработанных на станке, при этом эти поверхности жестких допусков обеспечивают механизму требуемую жесткость. Соответственно, очень трудно изготавливать литое основание для такого механизма, которое имело бы допуски, необходимые для данного механизма. Основание известного механизма также снабжено центральным отверстием, через которое должны проходить кабели, что также ослабляет указанное основание.
ЗАДАЧА ИЗОБРЕТЕНИЯ
Одной из задач настоящего изобретения является предложить параллельный кинематический механизм с уменьшенным весом.
Другой задачей является предложить параллельный кинематический механизм, который имеет большую экономическую эффективность, чем известные механизмы.
Еще одной задачей является сделать такой механизм, который легче изготавливать.
Очередной задачей настоящего изобретения является предложить параллельный кинематический механизм, имеющий повышенную общую жесткость, что дает возможность добиться жестких допусков при его изготовлении, чем известные механизмы.
Очередной задачей настоящего изобретения является предложить держатель карданного типа параллельного кинематического механизма, жесткость и вместе с этим требуемая точность которого повышены по сравнению с этими же параметрами известных параллельных кинематических механизмов. Эти задачи достигаются в сочетании с простотой конструкции, что ведет к сравнительно низкой стоимости изготовления.
Очередной задачей является также соединить друг с другом держатель карданного типа первого установочного приспособления и держатель карданного типа третьего установочного приспособления таким образом, чтобы избежать деформирования из-за изгиба каждого из указанных установочных устройств во время работы и добиться вследствие этого существенного повышения жесткости.
Очередной задачей является предложить такой держатель карданного типа, который имеет меньший вес, и таким образом также содействовать получению более простой конструкции, а также относительно низкой стоимости изготовления.
В этой связи очередной задачей является предложить держатель карданного типа для такого параллельного кинематического механизма, удовлетворяющего требованиям к его монтажу со стороны конечного пользователя.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Указанные задачи достигаются посредством настоящего изобретения, как это определено в независимом пункте прилагаемой формулы изобретения. Соответствующие дополнительные варианты осуществления настоящего изобретения поясняются соответствующими зависимыми пунктами формулы изобретения.
Настоящее изобретение относится к параллельному кинематическому механизму, содержащему три установочных приспособления, которые могут по отдельности удлиняться и укорачиваться в продольных направлениях, при этом каждое установочное приспособление на одном конце соединено с позиционирующей головкой посредством первого шарнира. Каждое установочное приспособление соединено соответственно с первой, второй и третьей внутренними рамками карданного подвеса универсальных карданных шарниров. Каждая внутренняя рамка карданного подвеса монтируется в подшипниках так, чтобы она могла поворачиваться во внешних рамках карданного подвеса, которые установлены с возможностью вращения во внешних подшипниках карданного подвеса во внешней раме. Указанная внешняя рама описывается в данном описании с иллюстрацией соответствующими чертежами как монтажная рама, причем эта рама указана только как место размещения подшипников держателя карданного типа (внешних рамок карданного подвеса). Эти местоположения должны быть указаны конечным пользователем механизма и могут быть организованы многочисленными способами при условии, что позиции подшипников сохранятся. Позиционирующая головка способна перемещаться в пределах рабочего диапазона в ответ на маневрирование установочных приспособлений. Механизм оснащен, по крайней мере, двумя усиливающими балками, каждая из которых соединена с позиционирующей головкой посредством соответствующего подшипника вращения балки, имеющего только одну степень свободы. Каждая усиливающая балка сконструирована так, чтобы могла скользить в продольном направлении в подшипнике балки в указанных соответствующих универсальных шарнирах, когда одно или несколько установочных приспособлений удлиняются или укорачиваются. Подшипник каждой балки соединен с держателем карданного типа посредством универсального шарнира балки, причем указанный подшипник, по крайней мере, одной усиливающей балки может поворачиваться вокруг оси, проходящей параллельно продольной оси указанной усиливающей балки. Первая внутренняя рамка карданного подвеса и третья внутренняя рамка карданного подвеса устанавливаются с возможностью вращения вокруг параллельных осей в соответствующих внешних рамках карданного подвеса. При этом соответствующие внешние рамки карданного подвеса соединены в общем держателе карданного типа, который монтируется с возможностью вращения вокруг общей оси карданного подвеса, при этом вторая внутренняя рамка карданного подвеса монтируется в отдельном держателе карданного типа, который устанавливается в двух оппозитно расположенных подшипниках с возможностью вращения вокруг отдельной оси карданного подвеса, которая не совпадает, т.е. не является общей осью вращения, с указанной общей осью карданного подвеса.
В одном из вариантов осуществления настоящего изобретения указанная вторая ось карданного подвеса ориентирована приблизительно параллельно указанной общей оси карданного подвеса.
В другом варианте осуществления настоящего изобретения указанная отдельная ось карданного подвеса отдельного держателя карданного типа ориентирована приблизительно перпендикулярно к указанной общей оси карданного подвеса, и, по крайней мере, один из указанных подшипников указанного отдельного держателя карданного типа расположен во внешней раме.
Еще в одном варианте осуществления настоящего изобретения оба подшипника отдельного держателя карданного типа расположены во внешней раме.
В следующем варианте осуществления настоящего изобретения один подшипник отдельного держателя карданного типа расположен во внешней раме, а другой подшипник отдельного держателя карданного типа расположен в общем держателе карданного типа с размещением его между подшипниками первой внутренней рамки карданного подвеса и подшипниками третьей внутренней рамки карданного подвеса.
В очередном варианте осуществления настоящего изобретения указанный другой подшипник отдельного держателя карданного типа выполнен как сферический подшипник скольжения, расположенный в общем держателе карданного типа.
В очередном варианте осуществления настоящего изобретения указанный другой подшипник отдельного держателя карданного типа выполнен как подшипник универсального шарнира, содержащий внутренний подшипник шарнира и внешний подшипник шарнира в общем держателе карданного типа так, что отдельный держатель карданного типа прикреплен к общему держателю карданного типа с двумя степенями свободы между указанными подшипниками держателя.
В очередном варианте осуществления настоящего изобретения каждая усиливающая балка обладает жесткостью на изгиб в первом направлении, которая значительно больше, чем ее жесткость на изгиб перпендикулярно к указанному первому направлению.
В очередном варианте осуществления настоящего изобретения каждая усиливающая балка имеет, как правило, прямоугольное поперечное сечение.
Варианты осуществления настоящего изобретения, подробно описанные ниже, включают в себя три установочных приспособления, каждое из которых соединено со своей соответствующей усиливающей балкой, где вторая усиливающая балка может слегка поворачиваться относительно своей продольной оси. Варианты осуществления настоящего изобретения, в которых второе установочное приспособление снабжено дополнительной усиливающей балкой, можно также считать входящими в область действия настоящего изобретения.
Как будет ясно из описанных вариантов осуществления настоящего изобретения, первому шарниру предоставлена только одна степень свободы, благодаря чему обеспечивается жесткость механизма.
Каждая усиливающая балка приспособлена, чтобы иметь сопротивление изгибу в первом направлении, которое значительно больше, чем сопротивление изгибу в направлении, перпендикулярном к первому направлению. Это позволяет использовать усиливающую балку, имеющую, как правило, прямоугольное поперечное сечение или эллиптическое поперечное сечение. Однако необходимо понимать, что в рамках данного изобретения приемлемы балки и с другим поперечным сечением, например такие, как двутавровые балки. В предпочтительном случае усиливающая балка изготавливается из композиционного материала, армированного углеродным волокном.
Детально описанный механизм в соответствии с настоящим изобретением содержит три установочных приспособления, каждое из которых постоянно соединено с усиливающей балкой в указанном первом шарнире. Как указано выше, одно из установочных приспособлений может быть оснащено дополнительной усиливающей балкой обычно с целью получения одинаковой жесткости во всех направлениях, как это раскрыто в документе с описанием известного технического решения, на который дана ссылка. Как указано выше, механизм предположительно может быть оснащен только двумя усиливающими балками, монтируемыми под прямым углом друг к другу. Подшипник, по крайней мере, одной усиливающей балки может слегка поворачиваться вокруг собственной продольной оси или вокруг оси в своем держателе карданного типа, параллельной указанной собственной продольной оси.
Каждое установочное приспособление описанного примера осуществления изобретения состоит из механизма винт-гайка, в котором гайка постоянно соединена с внутренним гироскопическим элементом. Однако следует понимать, что и другие модификации механизма, содержащие установочные приспособления другого типа, полностью входят в область действия настоящего изобретения. Например, в качестве установочных приспособлений вместо механизма винт-гайка могут использоваться линейные электродвигатели. В состав такого линейного электродвигателя может даже входить усиливающая балка или ее часть.
Каждая усиливающая балка может включать в себя, по крайней мере, один первый элемент скольжения, вытянутый в продольном направлении, например стальную направляющую планку, которая может быть приклеена и прочно прикреплена болтами к балке, причем указанный первый направляющий элемент присоединяется как фиксированное соединение формы, но с возможностью скольжения относительно второго направляющего элемента, например направляющей, которая присоединена к указанной гайке или непосредственно, или косвенно - через промежуточный подшипник. В случае когда направляющий элемент подключен к гайке косвенным образом через промежуточное соединение, второй скользящий элемент перемещается относительно гайки в соединении фиксированной формы благодаря тому, что имеет возможность наклоняться относительно установочного приспособления.
Винт или гайка приводится во вращение электродвигателем установочного приспособления. Если электродвигатель приводит во вращение винт, то электродвигатель присоединяется к одному концу винта, в то время как другой конец указанного винта закреплен в опорном подшипнике. В данном подробно описываемом варианте осуществления настоящего изобретения электродвигатель установочного устройства монтируется в держателе электродвигателя, один конец которого выполняется как один из элементов указанного первого шарнира и который также содержит присоединительные поверхности, к которым, как предполагается, будет прикрепляться одна или несколько усиливающих балок. Держатель электродвигателя, в котором смонтирован электродвигатель установочного приспособления, в альтернативном варианте может быть закреплен на одном конце винта по отношению к примеру, который показан, тогда как «свободный от электродвигателя» конец винта в этом случае присоединяется к первому шарниру. Когда электродвигатель приводит во вращение гайку, привод может приводиться в движение, например, посредством ременного привода или другим подобным способом так, чтобы передаточное отношение между установочным устройством и электродвигателем можно было легко изменить.
Два из указанных первых шарниров на позиционирующей головке имеют взаимно параллельные оси шарнира, тогда как третий из указанных первых шарниров на указанной позиционирующей головке имеет ось шарнира, простирающуюся перпендикулярно к двум другим. Кроме того, внутренняя гироскопическая ось универсального шарнира каждого установочного приспособления параллельна оси первого шарнира установочного приспособления по отношению к тем шарнирам, которые не имеют возможности поворачиваться, т.е. усиливающая балка не может поворачиваться в шарнире вокруг оси, параллельной ее собственной продольной оси симметрии.
В подробно описанном варианте осуществления настоящего изобретения предлагается параллельный кинематический механизм, в котором универсальные шарниры содержат два шарнира, каждый из которых имеет две степени свободы, и один шарнир, имеющий три степени свободы и только одну степень свободы по отношению к каждому из подшипников вращения балки механизма, например, в позиционирующей головке.
Следует понимать, что в соответствии с изобретением число имеющихся усиливающих, балок и размеры их поперечных сечений могут изменяться. Также должно быть понятно, что предлагаемое число степеней свободы первого шарнира, т.е. шарнира установочного устройства, по отношению к позиционирующей головке может изменяться и что подшипник вращения балки не является общим с первым шарниром.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее изобретение будет более подробно описано со ссылкой на примеры осуществления настоящего изобретения, иллюстрированные прилагаемыми чертежами, на которых:
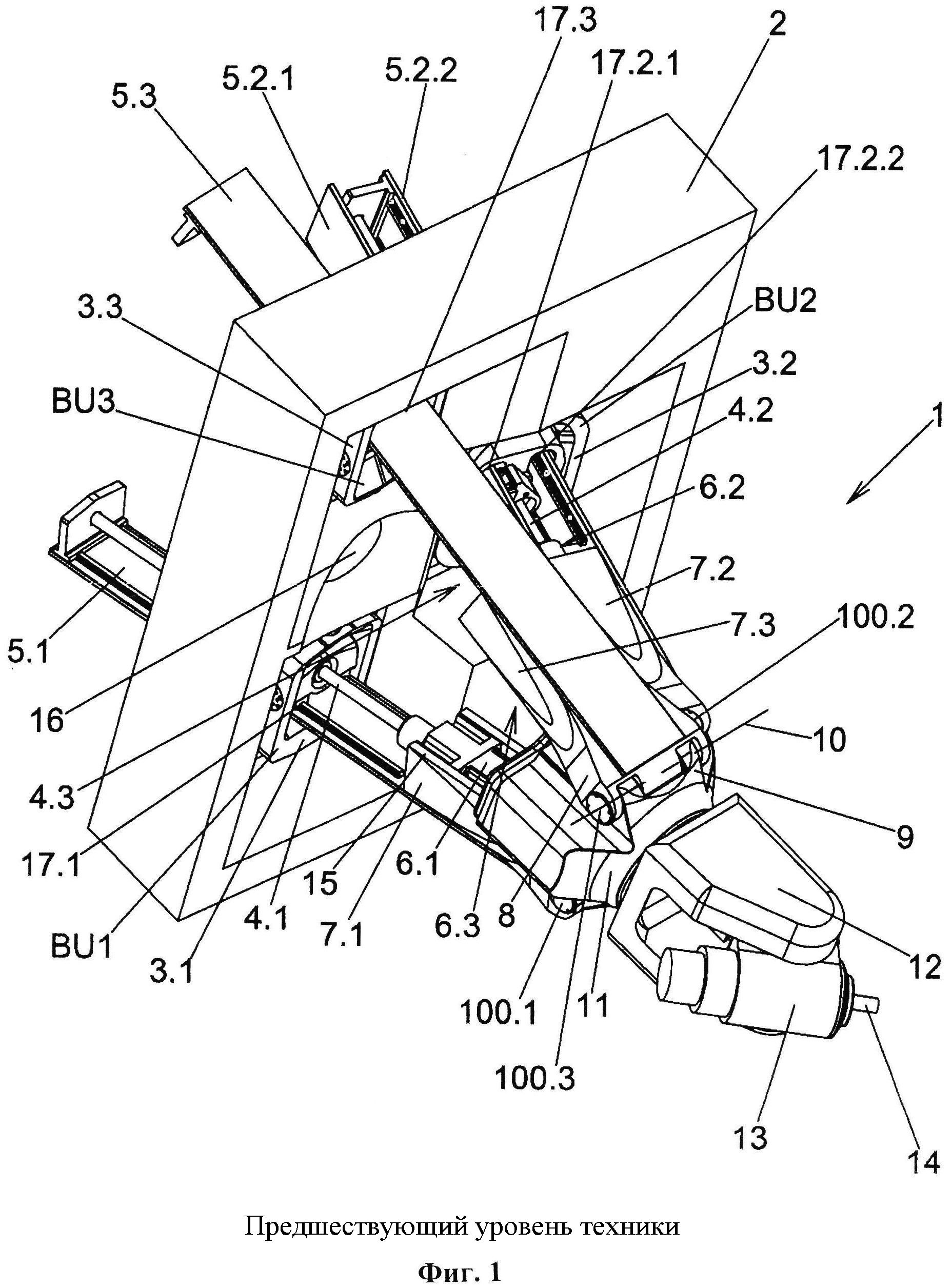
на фиг.1 показан параллельный кинематический механизм в соответствии с известным техническим решением;
на фиг.2 показан параллельный кинематический механизм в соответствии с первым вариантом осуществления настоящего изобретения;
на фиг.3 показан параллельный кинематический механизм в соответствии со вторым вариантом осуществления настоящего изобретения;
на фиг.4 показан параллельный кинематический механизм в соответствии с третьим вариантом осуществления настоящего изобретения;
на фиг.5 показаны держатели карданного типа механизма в соответствии с первым вариантом осуществления настоящего изобретения, представленным на фиг.2;
на фиг.6 показаны держатели карданного типа механизма в соответствии со вторым вариантом осуществления настоящего изобретения, представленным на фиг.3;
на фиг.7 показаны держатели карданного типа механизма в соответствии с третьим вариантом осуществления настоящего изобретения, представленным на фиг.4;
на фиг.8 показан вид сбоку монтажной рамы для карданов в соответствии с первым вариантом осуществления настоящего изобретения, представленным на фиг.2;
на фиг.9 представлено сечение А-А с фиг.8;
на фиг.10 представлен вид сбоку монтажной рамы для карданов по второму варианту осуществления настоящего изобретения, представленному на фиг.3;
на фиг.11 представлено сечение В-В на фиг.10;
на фиг.12 представлен вид сбоку монтажной рамы для карданов по третьему варианту осуществления настоящего изобретения, представленному на фиг.4;
на фиг.13 представлено сечение С-С на фиг.12;
на фиг.14 представлен вид сбоку альтернативной монтажной рамы для карданов по третьему варианту осуществления настоящего изобретения, представленному на фиг.4;
на фиг.15 представлено сечение D-D альтернативной монтажной рамы для карданов на фиг.14.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Чтобы более понятно описать настоящее изобретение, на фиг.1 представлен известный вариант механизма, на основе которого было разработано настоящее изобретение. Поэтому для общего понимания механизма в соответствии с настоящим изобретением дается ссылка на известное техническое решение. Терминология, использованная при описании указанного известного технического решения, слегка отличается от терминологии, используемой при описании вариантов осуществления настоящего изобретения. При этом в известном техническом решении содержится несколько соответствующих узлов (элементов), которые также имеются в вариантах осуществления настоящего изобретения, как можно понять из прилагаемых чертежей.
На фиг.1 показан известный из уровня техники параллельный кинематический механизм 1. Механизм включает основание 2, в трех соответствующих сквозных отверстиях которого установлены три отдельных универсальных шарнира 3.1, 3.2 и 3.3. Через каждый универсальный шарнир проходит установочное приспособление 4.1, 4.2, 4.3 и одна или две усиливающие балки 5.1, 5.2.1, 5.2.2, 5.3. Если универсальный шарнир, относящийся к установочному приспособлению, не совпадает с универсальным шарниром, относящимся к усиливающий балке, то универсальный шарнир усиливающей балки, называемый универсальным шарниром балки, обозначается как BU1, BU2, BU3. Установочное приспособление выполнено в виде механизма винт-гайка, гайка которого жестко соединена с универсальным шарниром. Винт установочного приспособления приводится во вращение установочным электродвигателем 6.1, 6.2, 6.3, установленным в держателе 7.1, 7.2, 7.3 электродвигателя, в свою очередь, конец указанного держателя оснащен первой частью 8 первого шарнирного соединения, которая взаимодействует со второй частью 9 указанного шарнирного соединения с целью поворота вокруг оси 10 первого шарнирного соединения. Вторая часть 9 указанного первого шарнирного соединения жестко соединена с позиционирующей головкой 11. Первое шарнирное соединение 8, 9, 10 известного технического решения, представленного на фиг.1, функционирует как подшипник вращения 100.3 балки в отношении третьей усиливающей балки 5.3 и в этом случае действует в качестве шарнира, имеющего только одну степень свободы. Соответственно, другие держатели 7.1, 7.2 электродвигателя соединены с позиционирующей головкой посредством отдельного подшипника вращения 100.1, 100.2 балки. Далее, позиционирующая головка 11 обычно соединена с маневрирующей головкой 12, инструментальной головкой 13 и средством крепления инструмента 14, предназначенными для перемещения инструмента в пределах рабочего диапазона станка. На двух противоположных сторонах держателя электродвигателя 7.1, 7.2, 7.3 имеются присоединительные поверхности 15, относительно которых крепятся усиливающие балки 5.1, 5.2.1, 5.2.2, 5.3. Как можно видеть из фиг.1, основание снабжено срединным окном 16, через которое пропускаются кабели и т.д.
Каждая усиливающая балка 5.1, 5.2, 5.3 смонтирована так, что может перемещаться со скольжением в опоре 17.1, 17.2.1, 17.2.2, 17.3 балки в основании 2 при удлинении или укорачивании установочного приспособления 4.1, 4.2, 4.3. Опоры 17.1, 17.2.1, 17.2.2, 17.3 балки в соответствии с известным техническим решением, представленным на фиг.1, смонтированы в универсальных соединениях BU1, BU2, BU3 балки, которые совпадают с карданными шарнирами 3.1, 3.2, 3.3 соответствующих установочных приспособлений.
Как можно видеть на фиг.1, одно из установочных приспособлений - второе установочное устройство 4.2 содержит две усиливающие балки 5.2.1, 5.2.2, которые помещены на соответствующих сторонах установочного приспособления, соединенного с указанными балками, и обычно ориентированы под прямым углом к двум остальным усиливающим балкам 5.1, 5.3, расположенным на двух других установочных приспособлениях 4.1, 4.3. В результате такого дублирования усиливающих балок все усиливающие балки в механизме могут иметь одни и те же размеры и воспринимать одинаково большие усилия.
На фиг.2 показан первый вариант осуществления настоящего изобретения - параллельный кинематический механизм 20, который содержит три установочных приспособления 24.1, 24.2, 24.3, каждое из которых снабжено электродвигателем и механизмом винт-гайка, который взаимодействует с внутренними элементами шарнира универсального карданного соединения в механизме. Установочные приспособления могут по отдельности удлиняться и укорачиваться. Каждое установочное приспособление 24.1, 24.2, 24.3 на одном конце присоединено к позиционирующей головке 211 посредством первого шарнирного соединения 200.1, 200.2, 200.3, причем каждое установочное приспособление 24.1, 24.2, 24.3 присоединено соответственно к первой, второй и третьей внутренним рамкам карданного подвеса 23.1, 23.2, 23.3 универсальных карданных соединений UGJ. Каждая внутренняя рамка карданного подвеса 23.1, 23.2, 23.3 монтируется в опорах 25, 26, 27 с возможностью поворота в держателях карданного типа 21, 22, которые смонтированы с возможностью поворота во внешних подшипниках 28, 29 универсального шарнира во внешней раме 290. Термин «подшипник» далее используется как для обозначения самого подшипника, так и для обозначения посадочного гнезда для подшипника. Позиционирующая головка 211 может перемещаться в пределах рабочего диапазона в соответствии с маневрированием установочных приспособлений 24.1, 24.2, 24.3. По меньшей мере, каждая из двух усиливающих балок 25.1, 25.2, 25.3 соединена с позиционирующей головкой 211 посредством первого шарнирного соединения 200.1, 200.2, 200.3, каждое из которых имеет только одну степень свободы. Каждая усиливающая балка 25.1, 25.2, 25.3 сконструирована так, чтобы могла скользить в продольном направлении в указанных соответствующих универсальных карданных соединениях UGJ, когда одно или несколько установочных приспособлений 24.1, 24.2, 24.3 удлиняются или укорачиваются. Подшипник каждой балки присоединен к держателю карданного типа 21, 22, причем указанный подшипник балки, по крайней мере, одной усиливающей балки 25.2 может поворачиваться вокруг оси, проходящей параллельно продольной оси указанной усиливающей балки 25.2. Первая внутренняя рамка 23.1 карданного подвеса и третья внутренняя рамка 23.3 карданного подвеса смонтированы с возможностью поворота вокруг параллельной оси в одном и том же держателе карданного типа 21. Таким образом, в настоящем изобретении ранее описанные наружные рамки карданного подвеса первого и третьего установочных устройств и первой и второй усиливающих балок установлены в общем держателе 21 карданного типа, который смонтирован с возможностью поворота вокруг общей оси карданного подвеса в подшипнике 28 общей рамки карданного подвеса. Вторая внутренняя рамка 23.2 карданного подвеса предназначена для поворота в отдельном держателе 22 карданного типа, который смонтирован в двух противоположных наружных подшипниках 29 рамки с возможностью вращения вокруг второй оси рамки карданного подвеса, которая не совпадает с указанной общей осью рамки карданного подвеса. Вместо этого в варианте осуществления настоящего изобретения, представленном на фиг.2, оси рамок карданного подвеса держателей карданного типа 21, 22 параллельны или приблизительно параллельны друг другу и проходят через наружные подшипники 28, 29 рамок карданного подвеса.
На фиг.3 представлен второй вариант осуществления настоящего изобретения, в котором параллельный кинематический механизм 30 содержит такие же соответствующие элементы, как и те, что представлены на фиг.2, за исключением того, что ориентация второй оси 31 наружных подшипников 39′ рамки карданного подвеса отдельного держателя 22 карданного типа перпендикулярна или приблизительно перпендикулярна общей оси 32 рамки карданного подвеса и внешнего подшипника 28 рамки карданного подвеса общего держателя 21 карданного типа. Как можно видеть из фиг.3, внешняя рама 390 данного второго варианта осуществления настоящего изобретения немного переделана из-за другой ориентации второй оси 31 карданного шарнира, что проявляется в том, что для одного из внешних подшипников 39″ рамки карданного подвеса на второй оси карданного подвеса 31 требуется дополнительная часть 391 внешней рамы.
На фиг.4 представлен третий вариант осуществления настоящего изобретения, в котором параллельный кинематический механизм 40 содержит такие же соответствующие части, как и те, что описаны на фиг.2, за исключением того, что ориентация второй оси 31 наружных подшипников 39′ рамки карданного подвеса перпендикулярна или приблизительно перпендикулярна общей оси 32 рамки карданного подвеса внешнего подшипника 28 рамки карданного подвеса общего держателя 21 карданного типа. В данном третьем варианте осуществления настоящего изобретения, представленном на фиг.4, первый внешний подшипник рамки 39′ отдельного держателя 22 карданного типа смонтирован в наружном подвесе 490, тогда как второй внешний подшипник 49 рамки смонтирован в общем держателе карданного типа 21.
Как можно видеть из чертежей, первый и второй варианты осуществления настоящего изобретения требуют четыре внешние опоры во внешней раме, а третий вариант осуществления настоящего изобретения требует только три внешних опоры во внешней раме.
На фиг.5 представлены два держателя карданного типа первого варианта осуществления настоящего изобретения, представленного на фиг.2, общий держатель карданного типа 21 и отдельный держатель карданного типа 22. Как было показано на фиг.2, общий держатель карданного типа 21 снабжен первым внешним подшипником 28′ рамки и вторым внешним подшипником 28″ рамки, подлежащими креплению к внешним опорам, например, во внешней монтажной раме, как обсуждалось ранее. Общий держатель карданного типа 21 оснащается также соответствующими первым и вторым подшипниками 25′, 25″, 27′, 27″, к которым крепятся внутренние рамки карданного подвеса для установочных устройств и их усиливающие балки. Кроме того, отдельный держатель карданного типа 22 снабжен первым подшипником 29′ рамки и вторым подшипником 29″ рамки, которые могут прикрепляться к внешним опорам, как описано выше. Также ось вращения 51 отдельного держателя карданного типа 22 параллельна или приблизительно параллельна оси вращения 52 общего держателя карданного типа 21, как это представлено на фиг.2. Отдельный держатель карданного типа 22 также оснащен первым и вторым подшипниками 26′, 26″ для внутренней рамки карданного подвеса второго установочного приспособления и его усиливающей балки. Как можно видеть из фиг.2 и 5, подшипники 25′, 25″, 26′, 26″, 27′, 27″ для внутренних рамок карданного подвеса перпендикулярны внешним подшипникам 28′, 28″, 29′, 29″ рамки, что необходимо для формирования универсального шарнира.
На фиг.6 представлено два держателя карданного типа 21, 22 для второго варианта осуществления настоящего изобретения, представленного на фиг.3. В указанном варианте осуществления внутренние подшипники для внутренних рамок карданного подвеса расположены в держателях карданного типа таким же образом, как это показано на фиг.5, но ориентация оси вращения 31 отдельного держателя карданного типа 22 перпендикулярна или приблизительно перпендикулярна оси вращения 32 общего держателя карданного типа 21 так, как это показано на фиг.3.
На фиг.7 представлено два держателя карданного типа 21, 22 третьего варианта осуществления настоящего изобретения, представленного на фиг.4. Кроме того, в указанном варианта осуществления внутренние подшипники для внутренних рамок карданного подвеса расположены в держателях карданного типа таким же образом, как это показано на фиг.5, где ориентация оси вращения 31 отдельного держателя карданного типа 22 перпендикулярна или приблизительно перпендикулярна оси вращения 32 общего держателя карданного типа 21, как это показано на фиг.4. Однако, как показано на фиг.4, второй внешний подшипник 49 рамки отдельного держателя карданного типа 22 смонтирован в общем держателе карданного типа 21 между подшипниками 25, 27 внутренних рамок карданного подвеса общего держателя карданного типа 21 и на равном расстоянии от них.
На фиг.8 показан вид сбоку монтажной рамы 290 вместе с ее общим держателем карданного типа 21 и ее отдельным держателем карданного типа 22 по первому варианту осуществления настоящего изобретения, представленному на фиг.2.
На фиг.9 показано сечение А-А рамы 290 и держателей карданного типа 21, 22, представленных на фиг.8. В этом сечении ясно видно, что ось вращения 52 общего держателя карданного типа 21 параллельна или приблизительно параллельна оси вращения 52 отдельного держателя карданного типа 22. Показаны также подшипники 25′, 25″, 27′, 27″ для внутренних рамок карданного подвеса общего держателя карданного типа 21 и подшипники 26′, 26″ для внутренней рамки карданного подвеса отдельного держателя карданного типа 22. Также на фиг.9 показаны первый внешний подшипник 28′ рамки и второй внешний подшипник 28″ рамки общего держателя карданного типа, а также первый и второй противоположно расположенные внешние подшипники 29′, 29″ рамки отдельного держателя карданного типа.
На фиг.10 показан вид сбоку монтажной рамы 390 вместе с ее общим держателем карданного типа 21 и ее отдельным держателем карданного типа 22 по второму варианту осуществления настоящего изобретения, представленному на фиг.3.
На фиг.11 показано сечение В-В монтажной рамы 390 и держателей карданного типа 21, 22, представленных на фиг.10. В этом сечении ясно видно, что ось вращения 32 общего держателя карданного типа 21 перпендикулярна или приблизительно перпендикулярна оси вращения 31 отдельного держателя карданного типа 22. Показаны также подшипники 25′, 25″, 27′, 27″ для внутренних рамок карданного подвеса общего держателя карданного типа 21 и подшипники 26′, 26″ для внутренней рамки карданного подвеса отдельного держателя карданного типа 22. Также на фиг.11 показаны первый внешний подшипник 28′ рамки и второй внешний подшипник 28″ рамки общего держателя карданного типа, а также первый и второй оппозитно расположенные внешние подшипники 39′, 39″ рамки отдельного держателя карданного типа. Оба указанных внешних подшипника 39′, 39″ рамки размещены в монтажной раме 390.
На фиг.12 показан вид сбоку монтажной рамы 490 вместе с ее общим держателем карданного типа 21 и ее отдельным держателем карданного типа 22 первой альтернативной компоновки по третьему варианту осуществления настоящего изобретения, представленному на фиг.4.
На фиг.13 показано сечение С-С монтажной рамы 490 и держателей карданного типа 21, 22, представленных на фиг.12. В этом сечении ясно видно, что ось вращения 32 общего держателя карданного типа 21 перпендикулярна или приблизительно перпендикулярна оси вращения 31 отдельного держателя карданного типа 22. Показаны также соответствующие подшипники 25′, 25″, 27′, 27″ для внутренних рамок карданного подвеса общего держателя карданного типа 21 и подшипники 26′, 26″ для внутренней рамки карданного подвеса отдельного держателя карданного типа 22. Также на фиг.13 показаны первый внешний подшипник 28′ рамки и второй внешний подшипник 28″ рамки общего держателя карданного типа, а также первый и второй оппозитно расположенные внешние подшипники 39′, 49″ рамки отдельного держателя карданного типа. Первый из этих двух внешних подшипников, 39′, установлен в монтажной раме 490, а второй из этих двух внешних подшипников, 49′, установлен в общем держателе карданного типа 21 между, с одной стороны, первыми подшипниками внутренней рамки карданного подвеса 25′, 25″ и, с другой стороны, вторыми подшипниками внутренней рамки карданного подвеса 27′, 27″. Расстояние между указанным вторым наружным подшипником рамки 49′ и первыми подшипниками внутренней рамки карданного подвеса 25′, 25″ равно расстоянию между указанным вторым наружным подшипником рамки 49′ и вторыми подшипниками внутренней рамки карданного подвеса 27′, 27″.
Второй внешний подшипник рамки 49′ выполнен в виде сферического подшипника скольжения, в котором шарик 131 расположен на отдельном держателе карданного типа 22, тогда как гнездо 132 для шарика 131 расположено в общем держателе карданного типа 21. Шарик 131 фиксируется в гнезде 132 стопорным кольцом 133.
На фиг.14 показан вид сбоку монтажной рамы 490 вместе с ее общим держателем карданного типа 21 и ее отдельным держателем карданного типа 22 второй альтернативной компоновки по третьему варианту осуществления настоящего изобретения, представленному на фиг.4.
На фиг.15 показано сечение D-D монтажной рамы 490 и держателей карданного типа 21, 22, представленных на фиг.14. В этом сечении ясно видно, что ось вращения 32 общего держателя карданного типа 21 перпендикулярна или приблизительно перпендикулярна оси вращения 31 отдельного держателя карданного типа 22. Показаны также соответствующие подшипники 25′, 25″, 27′, 27″ для внутренних рамок карданного подвеса общего держателя карданного типа 21 и подшипники 26′, 26″ для внутренней рамки карданного подвеса отдельного держателя карданного типа 22. Также на фиг.15 показаны первый внешний подшипник 28′ рамки и второй внешний подшипник 28″ рамки общего держателя карданного типа, а также первый и второй оппозитно распложенные внешние подшипники 39′, 49″ рамки отдельного держателя карданного типа. Первый из этих двух внешних подшипников, 39′, установлен в монтажной раме 490, а второй из этих двух внешних подшипников, 49′, установлен в общем держателе карданного типа 21 между, с одной стороны, первыми подшипниками 25′, 25″ внутренней рамки карданного подвеса и, с другой стороны, вторыми подшипниками 27′, 27″ внутренней рамки карданного подвеса. Расстояние между указанным вторым внешним подшипником 49′ рамки и первыми подшипниками 25′, 25″ внутренней рамки карданного подвеса равно расстоянию между указанным вторым внешним подшипником рамки 49′ и вторыми подшипниками внутренней рамки карданного подвеса 27′, 27″.
Второй внешний подшипник 49″ рамки представляет собой подшипник универсального шарнира, наружный подшипник 151 рамки которого неподвижно закреплен в общем держателе карданного типа 21, а внутренний подшипник 152 смонтирован с возможностью вращения вокруг оси вращения 32 в наружном подшипнике рамки 151. В этом внутреннем подшипнике шарнира 152 отдельный держатель карданного типа 22 смонтирован с возможностью вращения вокруг оси вращения 31. Таким образом, данный подшипник универсального шарнира предусмотрен для обеспечения независимого поворота общего держателя карданного типа 21 вокруг его оси вращения 32 и для независимого поворота отдельного держателя карданного типа 22 вокруг его оси вращения 31, в то время как указанные держатели карданного типа все еще соединены друг с другом.
Необходимо иметь в виду, что во всех описанных вариантах осуществления настоящего изобретения внутренние рамки карданного подвеса должны устанавливаться с возможностью вращения в каждом из держателей карданного типа, при этом внутренние рамки карданного подвеса предназначены для использования в качестве внутренних опор и направляющих при всех перемещениях установочных устройств и усиливающих балок, например, в соответствии с отдельными универсальными шарнирами 3.1, 3.2, 3.3, описанными в известном техническом решении параллельного кинематического механизма. Кроме того, следует иметь в виду, что любая из осей вращения внутренних рамок карданного подвеса перпендикулярна соответствующим осям вращения соответствующих держателей карданного типа, а также расположена в одной и той же соответствующей плоскости.
Реферат
Настоящее изобретение относится к параллельным кинематическим механизмам, предназначенным для работы в промышленности, и их держателям карданного типа. Параллельный кинематический механизм (20) содержит три установочных приспособления (24.1, 24.2, 24.3), каждое из которых выполнено с возможностью отдельно удлиняться и укорачиваться и соединено соответственно с первой, второй и третьей внутренними рамками (23.1, 23.2, 23.3) карданного подвеса универсальных карданных шарниров. Каждая из внутренних рамок смонтирована в подшипниках (25, 26, 27) с возможностью вращения в держателях карданного типа (21, 22), которые с возможностью вращения смонтированы во внешних подшипниках карданного подвеса во внешней раме (290). Первая (23.1) и третья (23.3) внутренние рамки смонтированы с возможностью вращения в общем внешнем держателе карданного типа (21), который установлен с возможностью вращения вокруг общей оси этой рамки. А вторая внутренняя рамка (23.2) смонтирована с возможностью вращения в отдельном держателе карданного типа (22), который установлен в двух оппозитно расположенных подшипниках с возможностью вращения вокруг второй оси этой рамки, которая не совпадает с указанной общей осью рамки. Изобретение обеспечивает точность перемещения механизма, повышенную жесткость и простоту конструкции. 2 н. и 10 з.п. ф-лы, 15 ил.
Формула
Документы, цитированные в отчёте о поиске
Система и способ управления роботом
Комментарии