Управление мощностью абляции на основе контактной силы - RU2648213C2
Код документа: RU2648213C2
Чертежи




Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область применения изобретения
Настоящее изобретение относится к системам абляции тканей. Более конкретно, настоящее изобретение относится к мониторингу контакта между инвазивным зондом и тканью внутри тела.
2. Описание смежной области
Сердечная аритмия, такая как мерцательная аритмия предсердий, возникает, когда некоторые области сердечной ткани аномально проводят электрические сигналы к смежной ткани, тем самым нарушая нормальный сердечный цикл и вызывая асинхронный ритм сердца.
Процедуры лечения аритмии включают в себя хирургическое устранение источника сигналов, вызывающих аритмию, а также разрушение путей прохождения таких сигналов. Подвергая избирательной абляции сердечную ткань путем приложения энергии через катетер, иногда можно приостановить или модифицировать прохождение нежелательных электрических сигналов из одной части сердца в другую. В процессе абляции образуются непроводящие поврежденные участки, что приводит к разрушению нежелательных путей прохождения электрического сигнала.
Проверка физического контакта электрода с целевой тканью важна для управления подачей энергии абляции. В известном уровне техники производились многочисленные попытки проверки контакта электрода с тканью, при этом был предложен ряд различных методов. Например, в патенте США № 6695808 описано устройство для лечения выбранной ткани или области органа пациента. Зонд имеет контактную поверхность, которую можно прижать к такой области посредством создания контактного давления. Датчик давления измеряет контактное давление. Считают, что такое устройство отвечает требованиям процедур, при выполнении которых необходимо создать плотный, но не чрезмерно сильный контакт между медицинским инструментом и анатомической поверхностью, обеспечивая пользователя информацией об инструменте, указывающей на наличие и амплитуду контактной силы.
В качестве другого примера, в патенте США № 6241724 описаны способы создания поврежденных участков в ткани тела с использованием секционированных электродных узлов. В одном варианте осуществления электродный узел на катетере служит опорой для датчиков давления, которые воспринимают контакт с тканью и передают сигналы модулю контактного давления. Модуль определяет элементы электрода, которые связаны с сигналами датчика давления, и направляет генератор энергии для передачи РЧ-энергии именно этим, а не другим элементам, которые находятся в состоянии контакта только с кровью.
Дополнительный пример представлен в патенте США № 6915149. В этом патенте описан способ картирования сердца при помощи катетера, имеющего точечный электрод для измерения локальной электрической активности. Чтобы избежать появления артефактов, возникающих из-за плохого контакта наконечника электрода с тканью, контактное давление между наконечником и тканью измеряется при помощи датчика давления с целью обеспечения стабильного контакта.
В публикации заявки на патент США 2007/0100332 описаны системы и способы оценки контакта «электрод-ткань» для абляции ткани. Электромеханический датчик внутри стержня катетера формирует электрические сигналы, соответствующие величине перемещения электрода в пределах дистальной части стержня катетера. Устройство вывода принимает электрические сигналы для оценки уровня контакта между электродом и тканью.
В патенте США № 7306593, выданном Keidar et al., описан способ абляции ткани в органе путем приведения в контакт зонда внутри тела с тканью, подлежащей абляции, и измерения одного или более локальных параметров в заданном положении при помощи зонда до абляции ткани. На экране отображается карта органа, показывающая, на основе одного или более локальных параметров, прогнозируемую степень абляции ткани, которая должна быть достигнута для данной дозы энергии, приложенной в заданном положении при помощи зонда. Данная доза энергии прикладывается в целях абляции ткани при помощи зонда, при этом фактическая степень абляции в заданном положении измеряется при помощи зонда по окончании абляции ткани. Измеренная фактическая степень абляции отображается на карте для сравнения с прогнозируемой степенью.
Импедансные способы оценки контакта «катетер-ткань», известные специалистам в данной области, как правило, основаны на измерении величины импеданса между электродом на катетере и электродом на поверхности тела. Когда значение амплитуды не превышает некоторого порога, считается, что электрод находится в контакте с тканью. Однако этот способ двухуровневой индикации контакта может оказаться ненадежным и чувствительным к изменениям импеданса между электродом на поверхности тела и кожей.
В публикации заявок на патент США № 2008/0288038 и 2008/0275465, поданных Sauarav et al., содержание которых включено в настоящий документ путем ссылки, описана система электродных катетеров, которая может содержать электрод, выполненный с возможностью приложения электрической энергии. Измерительную схему, выполненную с возможностью измерения импеданса, можно реализовать между электродом и землей при приближении электрода к целевой ткани. Процессор или процессорное устройство можно реализовать с целью определения состояния контакта для целевой ткани на основе, по меньшей мере частично, реактивного сопротивления импеданса, измеряемого при помощи измерительной схемы. В другом варианте осуществления состояние контакта может быть основано на фазовом угле импеданса.
В документе Determinants of Lesion Size During Radiofrequency Catheter Ablation: The Role of Electrode-Tissue Contact Pressure and Duration of Energy Delivery, David E. Haines, J. Cardiovasc Electrophysiol, том 2, стр. 509-515, декабрь 1991 г., описано влияние изменения контактного давления «электрод-ткань» и продолжительности подачи РЧ-энергии на размер итогового поврежденного участка в искусственной модели миокарда собак. Большее контактное усилие значительно снижает мощность, необходимую для поддержания постоянной температуры стыковочного элемента «электрод-ткань», при этом размер поврежденного участка моноэкспоненциально растет со временем.
В публикации заявки на патент США № 2010/0298826 описан интеграл по времени от силы для оценки в реальном времени размера поврежденного участка в системах абляции на основе катетеров. Устройство измеряет силу, приложенную зондом для контактной абляции к целевой ткани, и интегрирует эту силу по времени активации (подачи питания) зонда для выполнения абляции. Интеграл по времени от силы можно вычислять и использовать для получения расчетного размера поврежденного участка (глубины, объема и/или площади) в реальном времени. Считают, что интеграл по времени от силы позволяет учесть изменения мощности, подводимой к целевой ткани в реальном времени для получения уточненной оценки размера поврежденного участка.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В соответствии с вариантами осуществления настоящего изобретения предлагается способ абляции, который реализуется путем введения зонда в тело живого субъекта с одновременным выбором контактной силы между абляционным электродом зонда и целевой тканью, уровня мощности и временного интервала. Способ дополнительно реализуется путем прогнозирования размера поврежденного участка, который возникнет вследствие приведения абляционного электрода в контакт с целевой тканью с контактной силой при приложении энергии на уровне мощности с помощью абляционного электрода к целевой ткани для ее абляции в течение временного интервала, посредством моделирования размера поврежденного участка как нелинейной функции контактной силы, уровня мощности и временного интервала. Прогнозирование выполняется повторно с помощью итераций после увеличения одного из контактной силы, уровня мощности и временного интервала до тех пор, пока не будет найдена точка насыщения, причем дальнейшее увеличение не приводит к увеличению прогнозируемого размера поврежденного участка. Способ дополнительно реализуется путем установления того факта, что одна из итераций прогнозирует необходимый размер поврежденного участка, приведения абляционного электрода в контакт с целевой тканью и абляции целевой ткани с использованием контактной силы, уровня мощности и временного интервала этой итерации.
Дополнительный аспект данного способа включает в себя графическое отображение прогнозируемых значений во время итераций.
В одном из аспектов настоящего способа итерации при составлении прогноза включают в себя изменение контактной силы и поддержание значений уровня мощности и временного интервала на постоянном уровне.
В другом аспекте настоящего способа итерации при составлении прогноза включают в себя изменение уровня мощности и поддержание значений контактной силы и временного интервала на постоянном уровне.
В еще одном аспекте настоящего способа итерации при составлении прогноза включают в себя изменение временного интервала и поддержание значений контактной силы и уровня мощности на постоянном уровне.
В соответствии с вариантами осуществления настоящего изобретения дополнительно предлагается абляционное устройство для реализации описанных выше способов.
КРАТКОЕ ОПИСАНИЕ НЕКОТОРЫХ ВИДОВ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения следует обратиться к его подробному описанию, которое необходимо изучать вместе со следующими чертежами, на которых одинаковым элементам присвоены одинаковые позиционные обозначения.
На фиг. 1 представлено наглядное изображение системы для выполнения процедур абляции на сердце живого субъекта, которая сконструирована и работает в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг. 2 представлен комбинированный рисунок, изображающий соотношение между контактной силой и размером поврежденного участка в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг. 3 показан пример семейства кривых, демонстрирующий размеры поврежденного участка в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг. 4 представлена экранная визуализация части стенки сердца, формируемая при помощи имитатора процедуры кардиальной абляции в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг. 5 представлена экранная визуализация, аналогичная фиг. 4, демонстрирующая прогнозируемый поврежденный участок, формируемый в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг. 6 представлена экранная визуализация, аналогичная фиг. 4, демонстрирующая другой прогнозируемый поврежденный участок, формируемый в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг. 7 представлена блок-схема способа управления мощностью абляции в соответствии с одним из вариантов осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В следующем подробном описании многочисленные конкретные детали приведены для того, чтобы обеспечить полное понимание настоящего изобретения. Однако специалист в данной области определит, что не все эти детали всегда необходимы для практического осуществления настоящего изобретения. В данном случае хорошо известные схемы, логика управления и детали команд компьютерной программы для традиционных алгоритмов и процессов не показаны подробно, чтобы не затруднять без необходимости понимание основных концепций.
Аспекты настоящего изобретения могут быть осуществлены в форме программного кода, который обычно находится в постоянном запоминающем устройстве, таком как машиночитаемый носитель. В клиент-серверной среде такой программный код может храниться на клиенте или сервере. Программный код может быть реализован на любом из многих известных постоянных носителях информации, применяемых в системе обработки данных, таком как дискета, жесткий диск, электронный носитель или диск CD-ROM. Код может распространяться на таких носителях или передаваться пользователям из памяти или устройства хранения данных одной компьютерной системы по сети того или иного типа устройствам хранения на других компьютерных системах для применения пользователями таких систем.
Обратившись теперь к фигурам, начнем с фиг. 1, на которой представлено наглядное изображение системы 10 для выполнения процедур абляции на сердце 12 живого субъекта, которая сконструирована и работает в соответствии с одним из раскрываемых вариантов осуществления настоящего изобретения. Система содержит катетер 14, который оператор 16 вводит чрескожно через сердечно-сосудистую систему пациента в камеру или сосудистую структуру сердца 12. Оператор 16, который, как правило, является врачом, приводит дистальный наконечник катетера 18 в контакт со стенкой сердца на целевом участке абляции. В некоторых случаях после этого могут быть подготовлены карты электрической активации в соответствии со способами, раскрытыми в патентах США № 6226542 и № 6301496 и в принадлежащем тому же правообладателю патенте США № 6892091, описания которых включены в настоящий документ путем ссылки. Один коммерческий продукт, в котором реализованы элементы 10, можно приобрести как систему CARTO® 3, выпускаемую компанией Biosense Webster, Inc., 3333 Diamond Canyon Road, г. Даймонд-Бар, штат Калифорния 91765. Специалисты в данной области могут модифицировать эту систему в целях реализации принципов настоящего изобретения, описанных в данном документе.
Области, определенные в качестве аномальных, например при помощи оценки карт электрической активации, можно подвергать абляции путем приложения тепловой энергии, например, по каналу высокочастотного электрического тока, подаваемого по проводам в катетере к одному или более электродам на дистальном наконечнике 18, которые прикладывают радиочастотную энергию к миокарду. Энергия поглощается в ткани, нагревая ее до температуры (как правило, приблизительно 50°C), при которой она постоянно теряет свою электрическую возбудимость. При успешном выполнении этой процедуры создаются непроводящие поврежденные участки в сердечной ткани, которые разрушают аномальный электрический путь, вызывающий аритмию. Принципы настоящего изобретения можно применить к различным камерам сердца для лечения многих различных видов сердечной аритмии.
Катетер 14, как правило, содержит рукоятку 20, оснащенную подходящими органами управления, позволяющими оператору 16 управлять, позиционировать и ориентировать дистальный конец катетера желательным для абляции образом. Чтобы помочь действиям оператора 16, дистальная часть катетера 14 содержит датчики положения (не показаны), которые обеспечивают сигналы для процессора позиционирования 22, размещенного в пульте управления 24.
Энергия абляции и электрические сигналы могут передаваться к/от сердца 12 через один или более абляционных электродов 32, размещенных на дистальном наконечнике 18 или вблизи от него, по кабелю 34 к пульту управления 24. Сигналы электростимуляции и другие сигналы управления могут передаваться от пульта управления 24 по кабелю 34 и электродам 32 к сердцу 12. Индикаторные электроды 33, также подключенные к пульту управления 24, расположены между абляционными электродами 32 и имеют зацепления с кабелем 34.
Проволочные зацепления 35 соединяют консоль 24 с электродами 30 на поверхности тела и другими компонентами подсистемы позиционирования. Электроды 32 и электроды 30 на поверхности тела могут применяться для измерения температуры импеданса ткани на участке абляции, как указано в патенте США № 7536218, выданном Govari et al., который включен в настоящий документ путем ссылки. Датчик температуры (не показан), как правило, термопара или терморезистор, может быть установлен на каждом из электродов 32 или вблизи от него.
Пульт управления 24, как правило, содержит один или более электрогенераторов абляции 25. Катетер 14 может быть выполнен с возможностью подведения абляционной энергии к сердцу с использованием известного метода абляции, например, радиочастотной энергии, ультразвуковой энергии и световой энергии, формируемой лазером. Такие способы раскрыты в принадлежащих одному и тому же правообладателю патентах США № 6814733, 6997924 и № 7156816, которые включены в настоящий документ путем ссылки.
Процессор позиционирования 22 представляет собой элемент подсистемы позиционирования в составе системы 10, который измеряет координаты местоположения и ориентации катетера 14.
В одном из вариантов осуществления подсистема позиционирования содержит конструкцию для слежения за магнитным позиционированием, которая определяет положение и ориентацию катетера 14 путем возбуждения магнитных полей в заданном рабочем объеме и измерения этих полей на катетере с использованием катушек для возбуждения поля 28. Подсистема позиционирования может использовать систему измерения импеданса, как указано в патенте США № 7756576, который включен в настоящий документ путем ссылки, и в вышеупомянутом патенте США № 7536218.
Как отмечено выше, катетер 14 соединен с пультом управления 24, который позволяет оператору 16 наблюдать и регулировать функции катетера 14. Пульт управления 24 включает в себя процессор, предпочтительно компьютер, с соответствующими схемами обработки сигналов. Процессор соединен с монитором 29. Схемы обработки сигналов, как правило, принимают, усиливают, фильтруют и оцифровывают сигналы от катетера 14, включая сигналы, формируемые вышеупомянутыми датчиками и множеством индикаторных электродов местоположения (не показаны), размещенных дистально в катетере 14. Пульт управления 24 и система позиционирования принимают и используют оцифрованные сигналы в целях вычисления положения и ориентации катетера 14 и анализа электрических сигналов от электродов.
Как правило, система 10 включает в себя и другие элементы, которые не показаны на фигурах для простоты. Например, система 10 может включать в себя монитор электрокардиограмм (ЭКГ), подсоединенный для приема сигналов от одного или более электродов на поверхности тела с целью подачи синхронизирующего сигнала ЭКГ на пульт управления 24. Как упоминается выше, система 10, как правило, также включает в себя эталонный датчик положения, расположенный либо на наружном стандартном пластыре, прикрепленном к внешней части тела субъекта, либо на внутреннем катетере, который вводится в сердце 12 и поддерживается в фиксированном положении относительно сердца 12. Предусмотрены традиционные насосы и линии для циркуляции жидкостей через катетер 14 для охлаждения участка абляции.
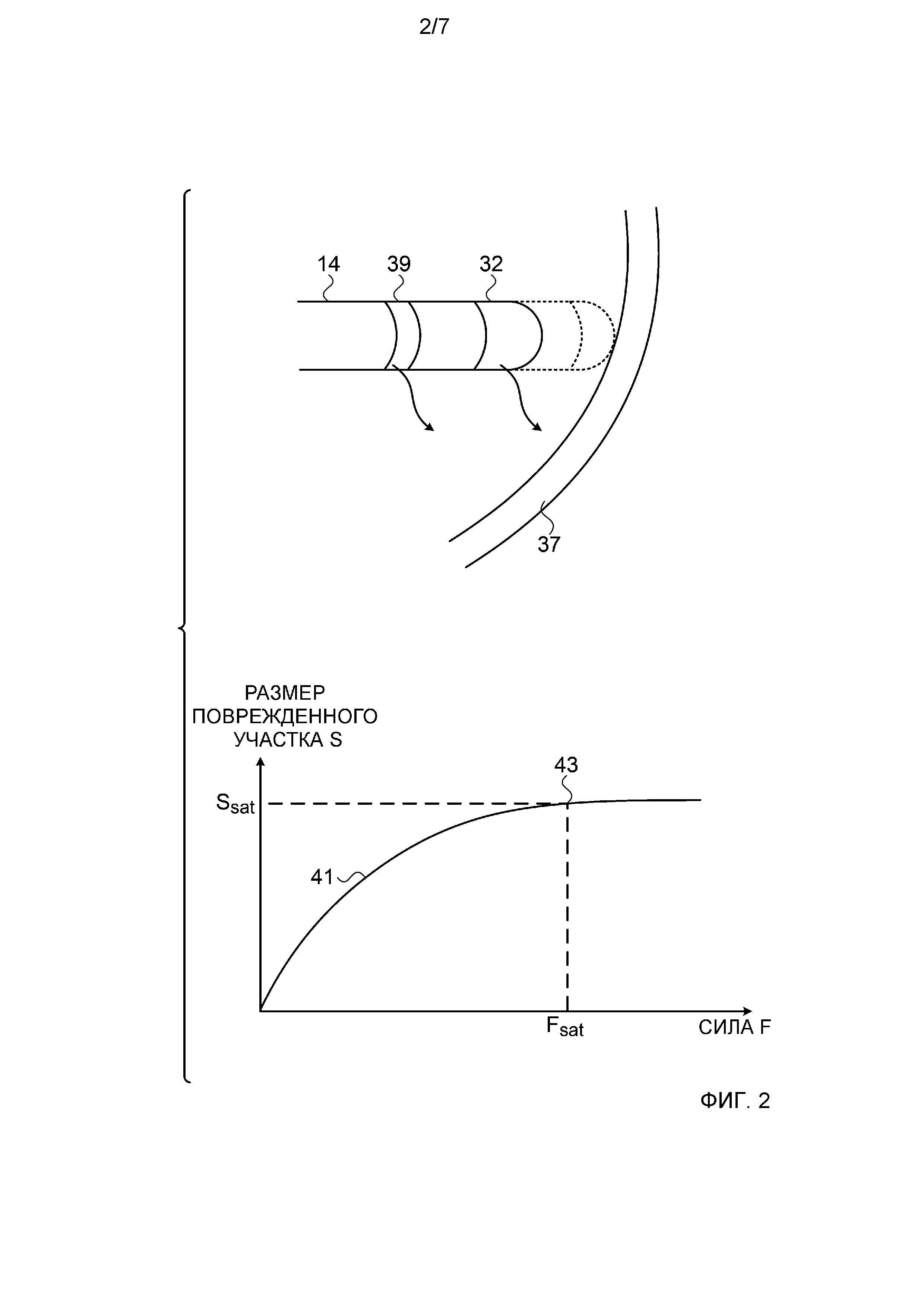
Обратимся теперь к фиг. 2, которая представляет собой комбинированный рисунок, изображающий соотношение между контактной силой и размером поврежденного участка, обусловленное воздействием абляционного электрода катетера 14, когда он приходит в контакт со стенкой 37 сердца 12 (фиг. 1), в соответствии с одним из вариантов осуществления настоящего изобретения. Автор изобретения обнаружил, что при абляции ткани возникает эффект насыщения. Конкретно, при данном временном интервале абляции T и данной мощности абляции P размер поврежденного участка S для различных сил F, прикладываемых катетером, представлен кривой 41, показанной в нижней части фиг. 2. Кривая 41 показывает, что по мере возрастания силы степень изменения размера поврежденного участка (dS/dF), т.е. наклон кривой, уменьшается. Точка 43 (Fsat, Ssat), в которой наклон по существу становится нулевым, соответствует точке насыщения абляционной системы, поскольку возрастание силы до значений больших, чем Fsat, не изменяет размер поврежденного участка Ssat.
Зная об эффекте насыщения, можно определить силу, необходимую для образования поврежденного участка необходимого размера (при данной мощности P и временном интервале T) в ходе процедуры абляции. Выражение, связывающее размер поврежденного участка S с силой F, можно записать следующим образом:
S=f(F,P,T)(1).
Отклонения, вызванные физическими изменениями, возникающими во время сердечного цикла, можно компенсировать путем интегрирования по времени, как показано уравнениями (2) и (3):

и
Перед началом процедуры абляции моделируют уравнение (1), приводя экспериментально определенные значения F, S, Fsat и Ssat (для различных значений мощности P и временного интервала T) в соответствие с уравнением, имеющим кривую, аналогичную кривой, показанной на фиг. 2. Эти значения можно установить при помощи устройства формирования поврежденного участка, описанного в публикации патента PCT № WO 2011/034925, который включен в настоящий документ путем ссылки. Например, можно задать уравнение, имеющее следующую форму:

где A и c являются константами, которые в большинстве случаев устанавливаются заранее. Альтернативно, они могут быть определены в ходе реальной процедуры абляции, при этом уравнение (4) можно применить для нахождения наборов значений F, P, и T, необходимых для получения необходимого размера поврежденного участка, как объясняется ниже. После этого можно выполнить абляцию с использованием данных значений.
Уравнение (4) можно заменить другими уравнениями, точнее отражающими эффект насыщения, например уравнением, описывающим подходящим образом ориентированную гиперболу. В любом случае открытый эффект насыщения показывает, что отношение между размером поврежденного участка и силой, приложенной со стороны катетера, выполняющего абляцию, является нелинейным. Вследствие этого моделирование нелинейного соотношения между двумя переменными является лучшим средством прогнозирования размера поврежденного участка, чем задание линейного соотношения.
Во время абляции контактную силу между абляционным электродом 32 и стенкой 37 можно измерить при помощи датчика положения, применяемого совместно с процессором позиционирования 22 (фиг. 1), или при помощи любого из других описанных выше методов, в целях проверки наличия физического контакта электрода с целевой тканью.
Во время операции две из трех переменных F, P, T поддерживают постоянными, при этом третья переменная изменяется, случайным образом или систематически, чтобы получить необходимый размер поврежденного участка S путем абляции. В любом случае контактную силу ограничивают, чтобы не превысить точку насыщения (Fsat, Ssat).
В одном варианте осуществления уровень мощности и временной интервал поддерживают постоянными, при этом оператор изменяет контактную силу с целью формирования необходимого размера поврежденного участка S, когда мощность абляции приложена в течение заданного временного интервала.
В другом варианте осуществления оператор поддерживает предварительно заданную контактную силу в процессе катетеризации. Уровень мощности также задан предварительно. При этом временной интервал, требуемый для получения необходимого размера поврежденного участка S, вычисляют, решая уравнение(1) или уравнение (2).
В еще одном варианте осуществления временной интервал и контактную силу задают предварительно, при этом оператор поддерживает контактную силу, как описано выше. Мощность, требуемую для получения необходимого размера поврежденного участка S, вычисляют, решая уравнение (1) или уравнение (2).
Во всех случаях обнаружение точки насыщения избавляет от необходимости проверки более высоких значений изменяемого параметра.
Решения уравнений в любом из упомянутых вариантов осуществления можно представить графически, путем ссылки на семейство кривых, построенных до выполнения абляции при помощи указанных выше способов. Обратимся теперь к фиг. 3, на которой показан пример семейства кривых 45, 47, 49, 51 в соответствии с одним из вариантов осуществления настоящего изобретения. Абляция выполняется с возрастающими временными интервалами T1-T4 соответственно, при этом уровень мощности абляции остается постоянным, а приложенная сила (F) изменяется. Кривые соответствуют точкам насыщения 53, 55, 57, 59 (Fsat, Ssat), удобно указывая максимальную силу, прилагаемую оператором, после которой размер поврежденного участка перестает увеличиваться, и дополнительно указывая временной интервал, необходимый для получения поврежденного участка при заданных условиях. Аналогичное семейство кривых можно построить, поддерживая постоянные значения временного интервала и контактной силы. В любом случае соответствующие области кривых, лежащие слева от точек насыщения 53, 55 57 59, называют ненасыщенными областями.
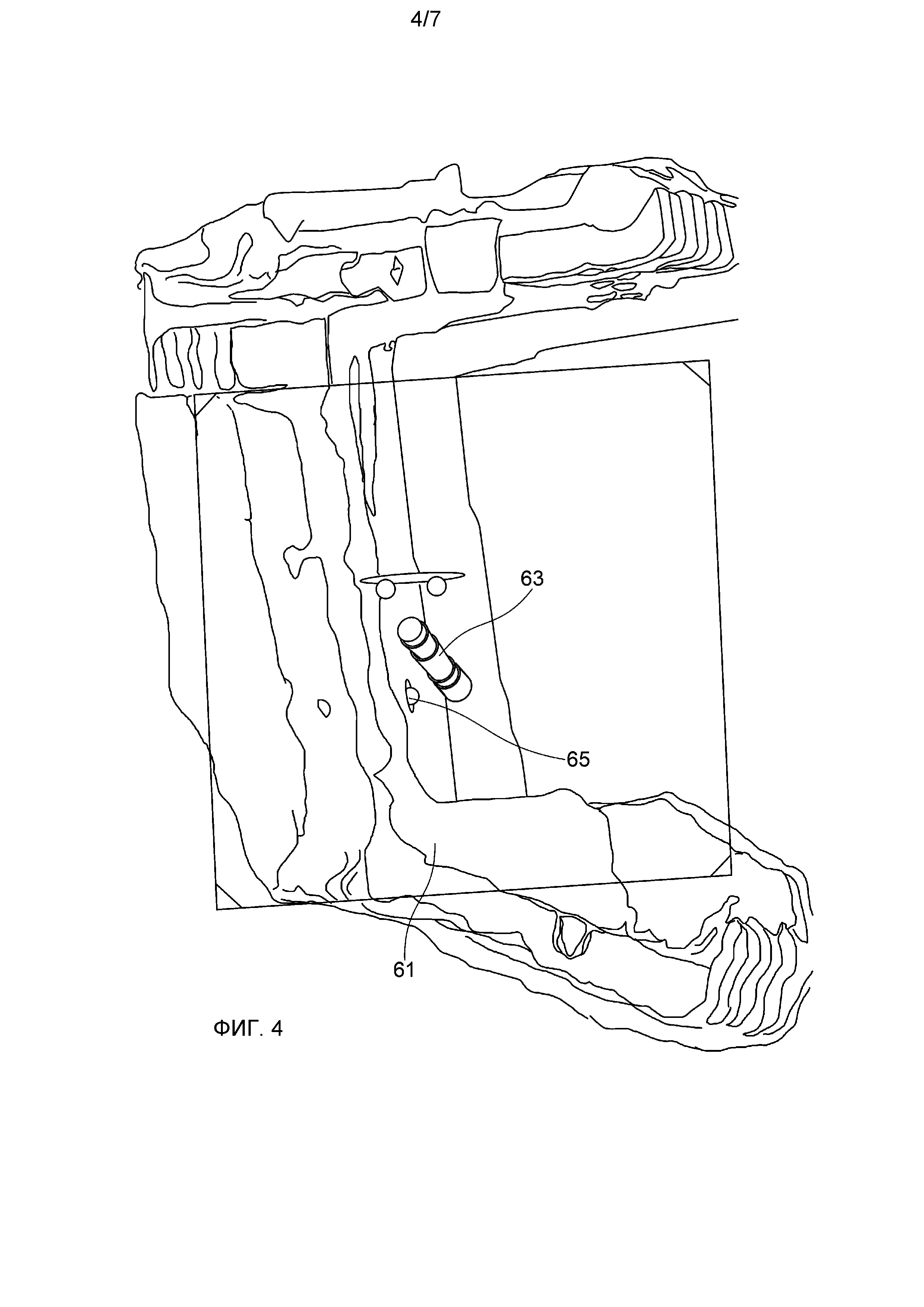
Обратимся теперь к фиг. 4, на которой представлена экранная визуализация части стенки 61 сердца, формируемая при помощи имитатора процедуры кардиальной абляции в соответствии с одним из вариантов осуществления настоящего изобретения. Наконечник 63 имитируемого катетера располагается возле целевой ткани 65.
Обратимся теперь к фиг. 5, на которой представлена экранная визуализация в соответствии с одним из вариантов осуществления настоящего изобретения, аналогичная фиг. 4, за исключением того, что теперь прогнозируемый поврежденный участок 67 имитируется и отображается для удобства оператора. Уравнения (1) и (2) применяются для определения точки насыщения с использованием выбранных параметров. Типовыми значениями являются:
P: 30 Вт;
F: 0,05-0,39 ньютонов (40 гс), (где 0,01 ньютон (1 гс) эквивалентен весу 1 грамма массы при стандартном ускорении свободного падения);
T: 60 сек.
Обратимся теперь к фиг. 6, на которой представлена еще одна экранная визуализация, аналогичная фиг. 4 и фиг. 5, в соответствии с одним из вариантов осуществления настоящего изобретения. Имитируемая абляция усилилась, при этом имитируемый сливающийся поврежденный участок 69 образовался в результате абляций целевой ткани 65 и двух других целей 71, 73.
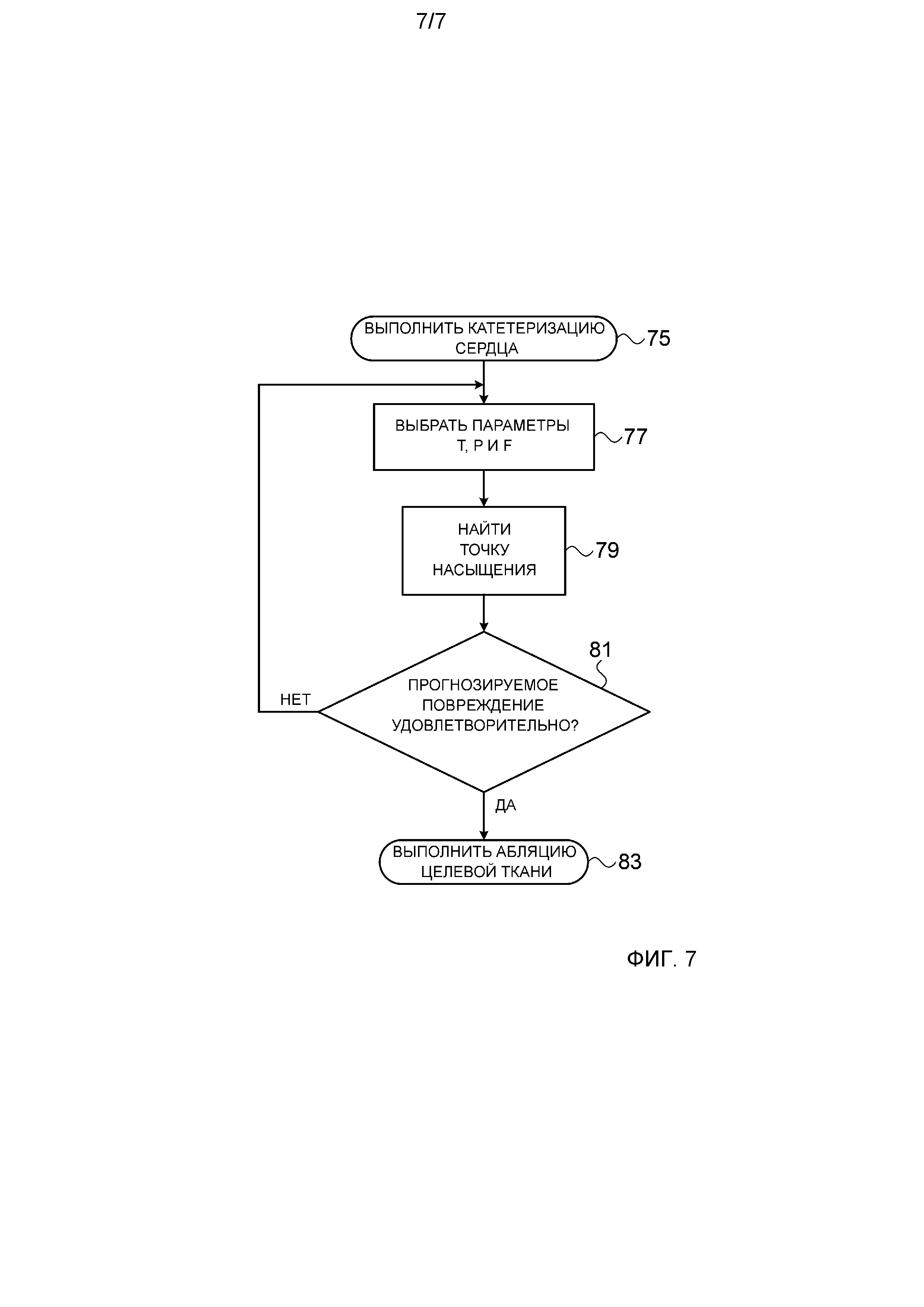
Обратимся теперь к фиг. 7, на которой представлена блок-схема способа управления мощностью абляции в соответствии с одним из вариантов осуществления настоящего изобретения. На первоначальной стадии 75 выполняют катетеризацию сердца субъекта. Предполагается, что цель абляции в сердце определяется одновременно с помощью известных способов или уже определена.
Затем на стадии 77 выбирают параметры, как описано выше. Например, при заданном временном интервале абляции T и заданной мощности абляции P, прогнозируют размер поврежденного участка S для силы F, применяя уравнение (1). Как отмечалось выше, можно также поддерживать силу F постоянной и изменять либо временной интервал T, либо мощность абляции P. Прогнозируемые поврежденные участки могут отображаться на мониторе для удобства оператора, как показано на фиг. 4, фиг. 5 и фиг. 6.
Затем на стадии 79 определяют точку насыщения, используя различные значения выбранных параметров F, P, T, например путем применения уравнения (2). Различные условия можно исследовать одновременно, применяя различные методы параллельной обработки.
Процедура переходит теперь к стадии принятия решения 81, на которой определяется, подходит ли для абляции один из прогнозируемых размеров поврежденного участка, определенных на стадии 77 в рабочем режиме и в ненасыщенной области. Если определение на стадии принятия решения 81 дает отрицательный результат, процедура управления возвращается к стадии 77, после чего осуществляется выбор различных параметров F, P, T.
Если результат определения на стадии принятия решения 81 положительный, процедура управления переходит к заключительной стадии 83. Абляция цели может быть выполнена с использованием выбранных значений параметров F, P, T.
Специалисты в данной области техники определят, что настоящее изобретение не ограничивается тем, что было конкретно показано и описано выше. Напротив, объем настоящего изобретения включает в себя как комбинации и субкомбинации различных элементов, описанных выше, так и их изменения и модификации, не входящие в известный уровень техники, которые могли бы быть предложены специалистами после чтения приведенного выше описания.
Реферат
Группа изобретений относится к медицинской технике, а именно к средствам мониторинга контакта при проведении абляции тканей. Способ абляции содержит стадии введения зонда в тело живого субъекта, при этом зонд имеет абляционный электрод, выбора контактной силы, действующей между абляционным электродом и целевой тканью, уровня мощности и временного интервала, прогнозирования размера поврежденного участка, в соответствии с соотношением между данной контактной силой, действующей между абляционным электродом и целевой тканью, количеством энергии, передаваемой электрическим током, и временным интервалом, в течение которого электрический ток проходит по абляционному электроду, итерации стадии прогнозирования размера поврежденного участка как нелинейной функции от контактной силы, уровня мощности и временного интервала, посредством изменения контактной силы и поддержания значений уровня мощности и временного интервала на постоянном уровне, пока не будет найдена точка насыщения, в которой увеличение контактной силы не приводит к увеличению прогнозируемого размера поврежденного участка, установления, что одна из итераций стадии прогнозирования прогнозирует необходимый размер поврежденного участка, приведения абляционного электрода в контакт с целевой тканью, и абляции целевой ткани с использованием контактной силы, уровня мощности и временного интервала одной итерации. Устройство содержит гибкий катетер, выполненный с возможностью введения в сердце живого субъекта и имеющий дистально расположенный абляционный электрод для приведения в контакт с целевой тканью в сердце, аблятор, выполненный с возможностью приложения дозы энергии к целевой ткани на уровне мощности, позволяющем выполнять абляцию целевой ткани, процессор и монитор, при этом процессор выполнен с возможностью выполнения итераций стадии прогнозирования размера поврежденного участка как нелинейной функции от контактной силы, уровня мощности и временного интервала посредством изменения контактной силы и поддержания значений уровня мощности и временного интервала на постоянном уровне, пока не будет найдена точка насыщения. Устройство дополнительно содержит систему измерения импеданса, содержащую электрод на поверхности тела для прикрепления к субъекту, которая имеет схему для прохождения электрического тока между электродом на поверхности тела и абляционным электродом и схему управления работой аблятора. Использование изобретений позволяет моделировать размер поврежденного участка. 2 н.п. и 1 з.п.ф-лы, 7 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для герметизации сосуда и способы герметизации
Комментарии