Хирургическая система со стерильной изоляцией - RU2692231C2
Код документа: RU2692231C2
Чертежи


Описание
Заявленное изобретение относится к хирургическим системам, в частности, для малоинвазивных хирургических операций, таких, как эндоскопические операции, включая роботизированные.
Известно, что в предшествующем уровне техники существуют хирургические системы, состоящие из первого опорного элемента (например, манипулятора или роботизированной руки), на которой закрепляют хирургический инструмент, предназначенный для малоинвазивных хирургических операций.
Хирургический инструмент может содержать главный корпус, предназначенный для фиксации в седле указанного первого элемента, и имеющий эндоскопическую трубку, оканчивающуюся активным концом (зажимами или им подобным). Внутри главного корпуса расположены механические системы трансмиссии и любые электрические приводы и/или датчики инструмента.
Сконструированный таким образом хирургический инструмент обычно снабжен системой быстрого разъединения с целью обеспечения возможности его быстрой смены в седле.
Недостатком известных систем является недостаточная стерильность операционной среды. Например, очевидно, что невозможно стерилизовать роботизированную руку целиком, и поэтому перед проведением хирургической операции на нее обычно надевают заранее стерилизованный пластиковый кожух.
В некоторых случаях возможна стерилизация хирургического инструмента целиком, но часто содержание внутри главного корпуса электронных и электромеханических компонентов делает стерилизацию невозможной, следовательно, стерилизации подвергают только эндоскопическую трубку, которая спроектирована с возможностью отсоединения от главного корпуса.
Однако предпочтительно, чтобы стерильный чехол не закрывал весь инструмент во избежание его непреднамеренного смещения и создания помех во время операции. Смена инструмента фактически неизбежна для возможности использования инструментов различного типа. Так, для осуществления замены инструмента предложены такие механические соединительные системы, например, при соединении которых стерильная оболочка сохраняет свое положение и располагается между частями системы. Однако для определенных типов инструментов предпочтительно наличие электрического соединения с внешней частью для возможности механизированного управления отдельными функциями и/или применения датчиков.
Указанная необходимость, однако, противоречит условию создания стерильности между частью с седлом (например, роботизированной рукой) и хирургической средой, в частности, зоной расположенной непосредственно рядом с операционным полем, с возможностью быстрой смены инструмента.
Общей задачей заявленного изобретения является обеспечение хирургической системы с возможностью быстрой смены хирургических инструментов, при этом, тем не менее, создается и поддерживается необходимый уровень стерильности, в том числе в случае наличия электрического соединения между инструментом и седлом для фиксации в нем указанного инструмента.
Принимая во внимание указанную задачу заявленного изобретения, появилась идея создать хирургическую систему, содержащую первый опорный элемент с седлом, выполненным с возможностью присоединения съемного хирургического инструмента для применения его при проведении операции, отличающуюся тем, что седло содержит, по меньшей мере, один первый электрический разъем, предназначенный для электрического соединения с соответствующим ему и расположенным в инструменте вторым электрическим разъемом, при этом, по меньшей мере, один из указанных разъемов выполнен с возможностью управляемого перемещения между первым начальным положением и вторым рабочим положением для электрического соединения со вторым разъемом, и обеспечен соединяющимися с контактами второго разъема электрическими контактами, посредством которых при перемещении разъема из первого положения во второе положение осуществляется перфорация, по меньшей мере, одной стерильной оболочки, расположенной между первым разъемом и вторым разъемом.
Для понимания инновационной сущности настоящего изобретения и его преимуществ в сравнении с предшествующим уровнем техники, пример воплощения применительно к указанным принципам описан далее при помощи сопроводительных чертежей, на которых представлено следующее:
- Фиг. 1 представляет вид зоны соединения первого опорного элемента и хирургического инструмента в хирургической системе;
- Фиг. 2 представляет другой вид зоны соединения в соответствии с фиг. 1, схематически в разрезе показана сборка инструмента для электрического соединения инструмента с седлом;
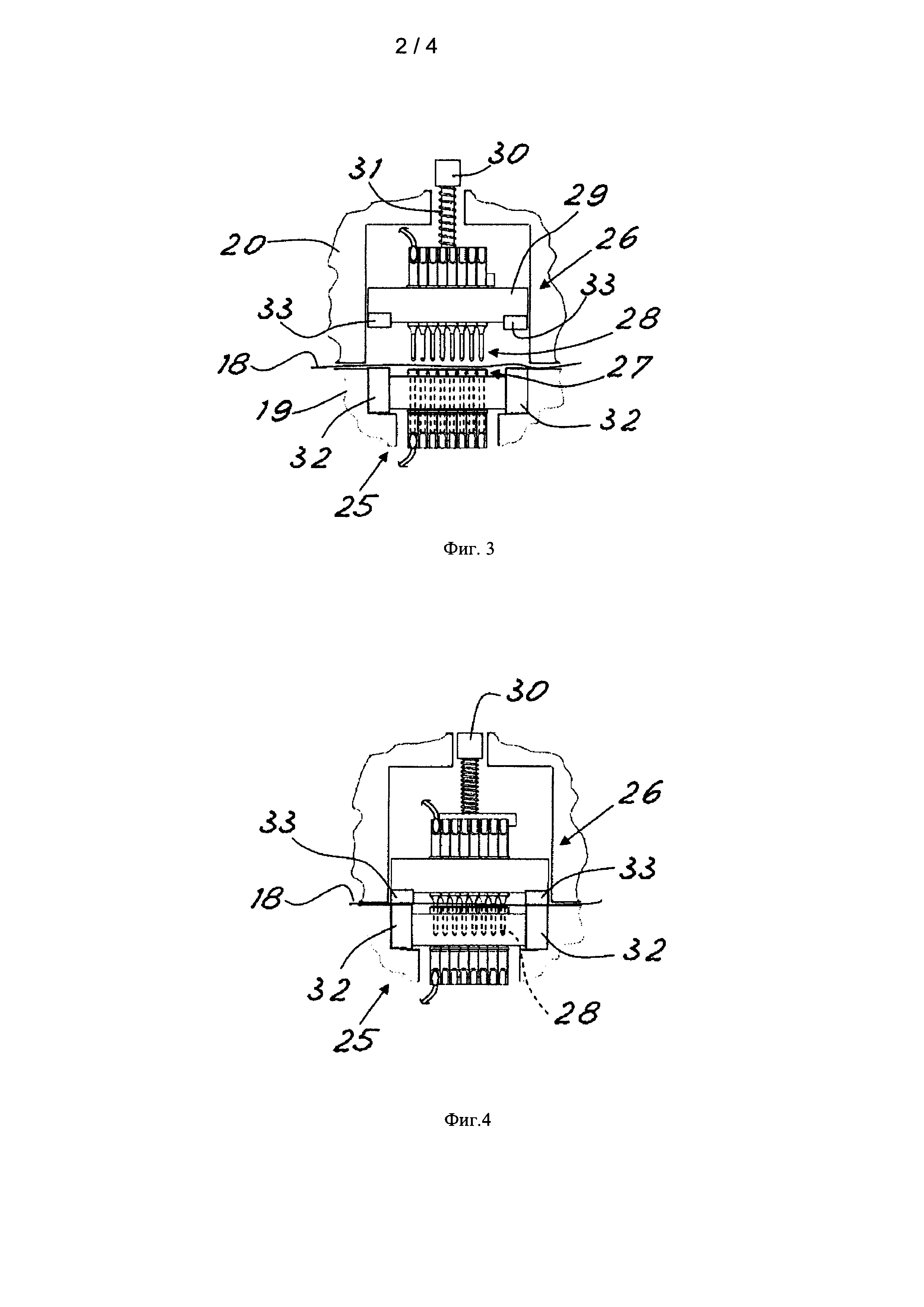
- Фиг. 3 и 4 представляют схематически электрическое соединение в разомкнутом состоянии и состоянии при замкнутой электрической цепи;
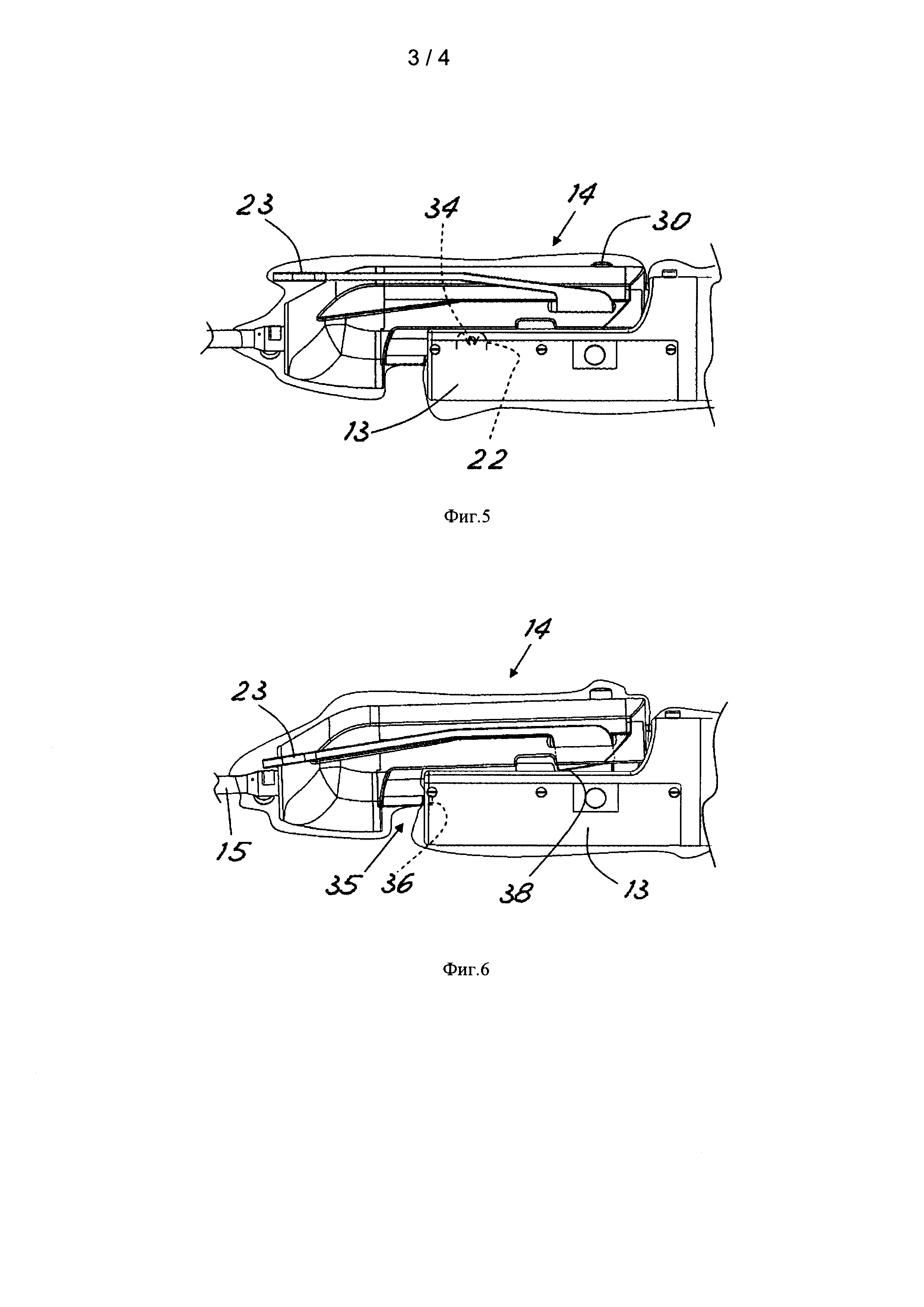
- Фиг. 5 иллюстрирует схематически вид сбоку системы согласно фиг. 1 в рабочем состоянии;
- Фиг. 6 представляет вид сбоку системы согласно фиг. 1 в состоянии сборки/разъединения хирургического инструмента;
- Фиг. 7 представляет увеличенный вид части зоны соединения в разрезе на начальном этапе разъединения;
- Фиг. 8 представляет схематически вид в перспективе роботизированной хирургической системы в соответствии с принципами настоящего изобретения.
Согласно представленным чертежам, фиг. 1 иллюстрирует зону соединения первого опорного элемента 13 и инструмента 14 хирургической системы.
Указанный инструмент представляет собой, в целом, например, известный инструмент для проведения эндоскопических операций, заканчивающийся трубкой с активным концом 17 инструмента, представляющим собой подходящий хирургический инструмент (например, зажим или направляющие щипцы, аспиратор, скальпель, и т.п.). В случае щипцов конец может быть ориентирован с возможностью вращения и/или поворачивания, при этом управление указанными движениями осуществляется расположенным в корпусе инструмента электроприводом. Преимущественно один из таких инструментов также может содержать эндоскопическую камеру для возможности съемки операционного поля внутри пациента.
Опорный элемент (для наглядности представлен только фрагмент, содержащий седло) может представлять собой, например, известный ручной манипулятор для закрепления на нем и управления инструментом или терминальной зоной или запястным шарниром роботизированной руки, что будет описано ниже.
С целью упрощения на фиг. 1 активный конец 17 показан пунктирной линией в форме овала, специалисту в области техники легко представить его во многих возможных видах.
Как представлено на фиг. 1, опорный элемент 13 содержит седло 19, которое стыкуется с возможностью разъединения с корпусом 20 инструмента 14. Стерильная оболочка (или покрытие) 18, выполненная из подходящего тонкого пластика (преимущественно полиуретана), оканчивается глухим концом, закрывая запястье и седло 19. Таким образом, опорный элемент (например, роботизированная рука) и седло 19 не требуют стерилизации.
Инструмент 14 выполнен с возможностью механической фиксации в седле, при этом между ними расположена стерильная оболочка 18. Например, преимущественно, инструмент может быть зафиксирован при помощи магнитной системы 21 известного типа, состоящей из постоянных магнитов, расположенных в седле, и соответствующих им ферромагнитных пластинок на инструменте.
Также может применяться известная механическая система передачи (механический привод), при этом стерильная оболочка 18 также расположена между седлом и корпусом инструмента. Например, соединение можно осуществить при помощи соединительной системы 22 типа штифт-паз, при этом соединение осуществляется скольжением параллельно главной оси инструмента с соответствующим стыковочным элементом (например, в форме штифта 34, показанным схематически пунктирной линией на фиг. 5), расположенным на стороне инструмента, предназначенной для фиксации в седле, при этом инструменту передается механическое движение. Например, в случае, если хирургический инструмент представляет собой щипцы, передающее движение может быть движением для выполнения раскрытия и закрытия щипцов с тем, чтобы не было необходимости в электроприводе.
Для извлечения инструмента из седла для удобства может применяться держатель 23. Указанный держатель также может представлять собой рычаг, при этом, если его тянуть или толкать, он взаимодействует с расположенным в седле инструмента противоположным концом 38, способствуя отсоединению инструмента, что схематически представлено на фиг. 6
Как видно на фиг. 1, если стерилизация инструмента невозможна или нежелательна (например, по причине содержания в инструменте чувствительных электронных компонентов), преимущественно он может быть помещен во вторую специальную стерильную оболочку (рукав или чехол) 24, выполненную из гибкого пластика (преимущественно полиуретана), подобно стерильной оболочке 18, за исключением одной непосредственно контактирующей с пациентом части 15 (например, эндоскопической трубки), при этом последняя выполнена с возможностью отсоединения известным образом от корпуса 20 для стерилизации известным способом.
Вторая стерильная оболочка 24 преимущественно представляет собой чехол с отверстием только в передней части, чтобы инструмент с трубкой можно было вставить в отверстие. Затем отверстие запаивают вокруг трубки, например, при помощи подходящей клеящей ленты или эластичного бинта. Таким образом, вторая оболочка, при ее наличии, также расположена между корпусом инструмента и седлом 19.
Как явно следует из фрагмента разреза, представленного на фиг. 2 (где в целях упрощения оболочки 18 и 24 не показаны) электрические разъемы 25 и 26 расположены в седле и на корпусе инструмента с возможностью контакта друг с другом через стенку стерильной оболочки или оболочек при перфорировании участков стенок стерильных оболочек, зажатых между седлом и корпусом инструмента. Электрические разъемы 25, 26 соединены с соответствующими электрическими цепями (здесь не представлены), расположенными с одной стороны внутри седла и с другой стороны внутри инструмента. Эти цепи могут содержать датчики, приводы, контрольные устройства, и т.д., что понятно специалисту в области техники.
По меньшей мере один из двух указанных разъемов выполнен с возможностью управляемого перемещения между первым начальным положением, предшествующим соединению, и вторым рабочим положением, для соединения с другим разъемом и содержит электрические контакты для соединения с контактами другого разъема, при этом во время перемещения из первого во второе положение контакты первого разъема перфорируют стерильную оболочку, покрывающую указанный конец первого опорного элемента с седлом и также (если есть) стерильную оболочку, покрывающую инструмент, и расположенную между первым и вторым разъемами.
Обнаружено, что наиболее предпочтительно, чтобы подвижный разъем был расположен на инструменте.
Преимуществом является то, что для механического управления соединением разъемов предусмотрено ручное устройство 30 управления (предпочтительно кнопка). Таким образом, после того как инструмент собран и зафиксирован в седле, нажатие на устройство 30 управления (кнопку) вызывает перемещение контактов, или штыревых контактов, подвижного разъема 26 по направлению к соответствующим контактам, или гнездовым контактам, другого разъема 25, при этом в стерильных оболочках образуются отверстия и разъемы соединяются.
Преимуществом является тот факт, что перфорация осуществляется на участках стерильных оболочек, зажатых между седлом и корпусом инструмента, что позволяет избежать разрыва оболочки в точках перфорации, при этом образуются отверстия маленького размера, плотно прилегающие к боковым стенкам перфорирующих штыревых контактов. Таким образом обеспечивается создание стерильного барьера.
Преимущественно, для оболочек выбирают пластик известного типа, который можно проткнуть, но затруднительно разорвать.
Количество, расположение и размер штыревых или гнездовых контактов электрического разъема зависит от особых требований к обеспечению электрического соединения, что понятно специалисту в области техники. Например, в случае относительно большого количества контактов они могут располагаться несколькими параллельными рядами.
Как будет описано далее, поступательное движение подвижного разъема может быть направлено в сторону, противоположную действию пружины, создающей вектор напряжения, направленный в сторону начального первого положения (например, противоположную разжимающему действию пружины, если кнопка 30 ее сжимает).
Более того, предпочтительно, если предусмотрены устройства для удержания подвижного разъема во втором положении, когда инструмент закреплен в седле и подвижный разъем перемещен из первого во второе положение. Таким образом, при разъединении инструмента из седла удерживающие средства могут также автоматически способствовать размыканию подвижного разъема и его возвращению в исходное положение.
На фиг. 3 схематически представлено предпочтительное воплощение электрических разъемов 25, 26. В частности, разъем 25 является стационарным разъемом, расположенным в выемке для фиксации инструмента в седле и, содержащим определенное количество электрических контактов 27, преимущественно гнездовых. Разъем 26 в свою очередь содержит штыревые контакты 28, расположенные на подвижной платформе 29 и ориентированные относительно соответствующих контактов 27 разъема 25.
Контакты 28 выполнены с возможностью перфорирования стенки стерильного чехла. Например, они могут быть цилиндрической формы с коническим концом, заостренным так, чтобы было возможно осуществить перфорирование оболочки, не разорвав ее, и также способствовать соединению с гнездовыми контактами. Предпочтительно, чтобы гнездовые контакты имели расширенное (воронкообразное) впускное отверстие, способствующее входу/выходу штыревых контактов при не идеально осевом перемещении. Это позволяет, например, осуществлять их соединение/разъединение движением по кривой траектории, как будет описано далее.
Платформа 29 может скользить в сторону, противоположную движению пружины (например, пружины 31, связанной с кнопкой 30) между первым начальным положением (представленном на фиг. 3), при котором контакты 28 углублены, и вторым рабочим положением (представленном на фиг. 4), при котором контакты 28 выдвигаются за стенку инструмента, перфорируя стерильную оболочку и соединяясь с соответствующими контактами 27.
Преимущественно, в начальном положении концы подвижных контактов полностью утоплены в корпусе инструмента во избежание возможного повреждения контактов и/или ранения человека, держащего инструменты.
Когда разъемы соединены, контакты разъема 26 могут оставаться в рабочем состоянии благодаря удерживающим средствам, пока инструмент не вынут из седла. Указанные удерживающие средства могут представлять собой, например, механические средства известного типа для соединения с возможностью последующего разъединения разъема 26, такие как пул-пуш системы (первоначальное нажатие на кнопку соединяет их, а последующее нажатие - разъединяет) или разъединение осуществляют отсоединением инструмента от седла.
Желательно и возможно использовать те же контакты 27 и 28 в качестве удерживающих средств, если их конструкция исключает возможность случайного, непроизвольного разъединения.
Однако установлено, что лучше всего использовать магнитную удерживающую систему, которая смыкается при движении двух разъемов друг к другу при соединении и размыкается просто при последующем разъединении инструмента и седла. Такая система особенно проста и очень надежна.
Как ясно видно на фиг. 3, 4 для обеспечения такой магнитной системы необходимо, чтобы магниты 32 были расположены в одном из двух разъемов (предпочтительно, разъеме седла) а соответствующие ферромагнитные вставки 33 - в другом. Относительное расположение магнитов и вставок такое, что при соединении разъемов при нажатии на устройство 30 управления магниты и вставки приближаются друг к другу на расстояние, достаточное для возникновения притяжения через стерильную оболочку, и соединяются друг с другом несмотря на сопротивление, создаваемое возвращающейся в исходное положение пружиной 31. Когда корпус инструмента отделяют от седла, магниты и вставки разъединяются и подвижный разъем легко возвращается в исходное положение благодаря действию возвращающейся пружины.
На фиг. 5 схематически представлен инструмент 14, зафиксированный в седле, при этом разъемы соединены.
Преимущественно, между инструментом и седлом расположены направляющие, обеспечивающие (по меньшей мере, во время первого разъединяющего движения), разъединение контактов по заданной траектории во избежание их необратимого скручивания.
В частности, как схематически представлено на фиг. 6, направляющие 35 способствуют движению инструмента по криволинейной траектории с достаточно большим радиусом, описываемым контактами, при этом возможно извлечение контактов без их необратимой деформации.
Преимущественно, направляющие (например, состоящие из шпонки 36, соответствующей приемным выемкам 37) могут быть расположены на передней части корпуса и седла, в то время как зона расположения разъемов находится в их задней части, так, обеспечивается относительно большое расстояние, и, следовательно, достаточно большой радиус, между разъемами и точкой вращения, образованной направляющими 35. Как представлено на фиг. 6, держатель 23, при его наличии, должен содержать опорный конец 38, который, отталкиваясь от дна основания, способствует отсоединению инструмента от седла.
Сравнение фиг. 5 и фиг. 6 помогает понять, как действует держатель типа рычаг при разъединении инструмента и седла.
На фиг. 7 схематически представлен пример начального этапа разъединения контактов двух разъемов по кривой траектории, при этом деформации контактов не происходит.
На фиг. 8 схематически представлено предпочтительное воплощение обозначенной номером 10 хирургической системы согласно заявленному изобретению в роботизированном хирургическом приложении.
Система 10 содержит, по меньшей мере, одну роботизированную руку 11, при помощи которой под управлением командной консоли 12, управляемой хирургом, осуществляется операция.
Роботизированная рука представляет собой роботизированную руку известного типа и предназначена для особого применения. Хирургическая станция также может содержать несколько роботизированных рук, хотя здесь в целях упрощения показана и описана только одна.
Роботизированная рука (или каждая роботизированная рука) заканчивается отделом запястья - опорным элементом 13, предназначенным для фиксации и управления хирургическим инструментом 14 с тем, чтобы посредством конца 15 (например, эндоскопической трубки) взаимодействовать с пациентом 16. Инструмент зафиксирован на роботизированной руке в приемном седле 19, расположенном в отделе запястья, образуя опорный элемент 13 с возможностью управляемой фиксации и направления инструмента в операционное поле.
Роботизированные руки, инструменты и приводы для управления указанными инструментами далее не будут описаны или проиллюстрированы подробно, поскольку они известны и понятны специалисту в области техники.
Хирургические операции, которые возможно осуществить при использовании системы, их режим подготовки и проведения также не описаны здесь, поскольку понятны специалисту в области техники.
Роботизированная рука имеет специальный стерильный чехол или оболочку 18, имеющую форму, не препятствующую движению роботизированной руки, что понятно специалисту в области техники. Указанная оболочка 18 подвергается перфорированию разъемом, как описано выше, в месте соединения со вторым чехлом - оболочкой, в которую помещен инструмент. Таким образом, нет необходимости стерилизовать всю роботизированную руку.
Таким образом, поставленные задачи достигаются благодаря применению стерильных оболочек, стенки которых перфорируются только в зоне электрических разъемов при движении штыревых контактов, причем сохраняется стерильность барьера. К тому же в случае замены инструмента уже перфорированная зона контакта не ухудшает значительно стерильность благодаря тому факту, что отверстия маленькие. Более того, можно выбрать материал стерильной оболочки такой эластичности, при которой отверстия самопроизвольно стягиваются при удалении из них перфорирующих контактов.
Преимуществом является тот факт, что отсоединение инструмента осуществляется особенно быстро и не требует проведения особых процедур, например, для разъединения разъема не требуется ручного управления системой.
Очевидно, что представленное выше описание воплощения заявленного изобретения, включая сущность объекта изобретения, приведено в качестве примера практической реализации указанной сущности изобретения и не рассматривается как ограничение заявленного объема прав. Например, устройство управления для приведения в движение разъема может отличаться от кнопки (например, представлять собой рычаг) и/или содержать механический привод, в зависимости от необходимой для перфорирования стерильных оболочек и соединения электрических разъемов друг с другом силы.
Хирургический инструмент также может отличаться от описанного и не обязательно должен быть предназначен для эндоскопического применения.
Штыревые и гнездовые контакты с любыми связанными перфорирующими/соединительными механизмами также могут быть взаимозаменяемы в зависимости от занимаемого пространства в седле или в инструменте. Например, в случае роботизированной руки пространство может быть ограничено, поэтому, предпочтительно, чтобы подвижный механизм для перфорирования располагался на инструменте.
Более того, разъемы также могут быть выполнены с возможностью легкого вращения для их ориентирования в направлении соединения в зависимости от напряжения, возникающего между штыревыми и гнездовыми контактами во время соединения или разъединения разъемов.
Наконец, бесконтактные системы передачи сигнала, например, оптического, радио или электромагнитного типа также могут быть расположены между инструментом и седлом.
Реферат
Изобретение относится к медицине. Роботизированная хирургическая система для малоинвазивных хирургических операций содержит первый опорный элемент с седлом для присоединения хирургического инструмента с возможностью его смены, для операционного применения. Седло содержит по меньшей мере один первый электрический разъем, расположенный в седле и предназначенный для электрического соединения с соответствующим ему вторым электрическим разъемом, расположенным в инструменте, при соединении инструмента с седлом. По меньшей мере один из двух указанных разъёмов выполнен с возможностью управляемого перемещения между первым начальным положением и вторым рабочим положением для электрического соединения с другим разъёмом, и для взаимодействия с другим разъёмом обеспечен электрическими контактами, подходящими для осуществления перфорирования во время перемещения между первым положением и вторым положением по меньшей мере одной стерильной оболочки, расположенной между первым и вторым разъёмами. Изобретение обеспечивает возможность быстрой смены хирургических инструментов при создании необходимого уровня стерильности, в том числе в случае наличия электрического соединения между инструментом и седлом для фиксации в нем указанного инструмента. 14 з.п. ф-лы, 8 ил.
Комментарии