Регулируемая магнитодинамическая опора вертикального ротора - RU2398977C1
Код документа: RU2398977C1
Чертежи












Описание
Изобретение относится к магнитным опорам высокооборотных роторов с вертикальной осью вращения, посредством которых роторы удерживаются в вертикальном положении, например роторов - накопителей энергии, центрифуг, гироскопов и подобных устройств.
В верхних опорах высокооборотных роторов с вертикальной осью вращения для уменьшения давления на подпятник и стабилизации его вертикального положения применяют магнитные подшипники, повышающие надежность и долговечность работы опор.
Известна магнитная опора вертикального ротора, содержащая кольцевой постоянный магнит с двумя полюсными наконечниками, расположенными на рабочем торце, разнесенными по радиусу и направленными вниз, и установленный на роторе якорь в виде втулки с двумя ответными по отношению к полюсным наконечникам кольцевыми выступами, имеющими одинаковые с полюсными наконечниками размеры и отделенными от них осевым зазором. Опора снабжена также, по меньшей мере, одним диском, установленным на роторе между кольцевыми электрообмотками, для компенсации части веса ротора и его осевых отклонений (патент Великобритании №13379987, F16C 32/04, опубл. 08.01.75 г.). Эта магнитная опора разгружает подпятник ротора и стабилизирует его вертикальное положение. Однако она отличается сложной конструкцией, имеет увеличенные габариты вращающегося с ротором якоря, что неприемлемо для высокооборотных роторов.
Известна также магнитная опора ротора, содержащая ферромагнитную втулку, закрепленную соосно ротору на его верхней крышке, кольцевой аксиально намагниченный магнит, установленный в корпусе над втулкой соосно с ней, и полюсный наконечник, выполненный в виде кольца с радиальной полкой у торца, примыкающего к нижнему торцу магнита (патент ФРГ №1071593, В04В 9/12, опубл. 09.06.90 г.). Данная магнитная опора обеспечивает вращение ротора без механических контактов с элементами верхней части корпуса, разгружает подпятник действием осевой силы притяжения магнита и стабилизирует положение оси вращения ротора за счет радиальной жесткости, обусловленной действием симметричного магнитного поля. Однако конструкция элементов данной магнитной опоры не позволяет эффективно использовать энергию магнита для повышения несущей способности и радиальной жесткости опоры.
Известна магнитная опора вертикального ротора, содержащая ферромагнитную втулку, закрепленную соосно с ротором на его верхней крышке, кольцевой аксиально намагниченный магнит, установленный в корпусе над втулкой соосно с ней, и полюсный наконечник, выполненный в виде кольца с радиальной полкой у торца, примыкающему к нижнему торцу магнита, при этом ферромагнитная втулка в верхней части снабжена кольцевым радиальным выступом, толщина которого оптимизирована с шириной нижнего торца полюсного наконечника, а наружный диаметр наконечника оптимизирован со средним диаметром магнита (патент России №2054334, В04В 9/12 опубл. 20.02.96 г.). Данная магнитная опора позволяет одновременно повысить радиальную жесткость магнитной опоры на 10% и уменьшить давление на подпятник на 5%, однако этого недостаточно для более тяжелых роторов.
Ближайшим техническим решением к предложенному является магнитодинамический подшипник - демпфер, содержащий систему с периодическим знакопеременным магнитным полем на основе постоянного магнита либо электромагнита с одной стороны, а с другой стороны систему ротора либо статора, выполненную на основе материала с высокой электропроводностью, при этом отношение величины периода намагниченности знакопеременного магнитного либо электромагнитного поля к амплитуде колебаний ротора больше 1, а отношение амплитуды колебаний ротора к магнитному зазору меньше 0,8 (патент RU 2328632 С2 опубл. 10.07.08 г.). Данная опора позволяет значительно увеличивать радиальную жесткость в динамике, гасить колебания ротора и повысить надежность работы изделия. Однако данная опора не уменьшает давление на подпятник в тяжелых роторах, что может вызывать его износ и разрушение.
Технический результат изобретения заключается в значительном уменьшении давления на подпятник в динамике до любой требуемой степени разгрузки, вплоть до левитации ротора, в гашении всех видов колебаний ротора, в том числе ориентированном на осевые колебания, в высокой радиальной жесткости в динамике, в простоте конструкции и пригодности к серийному производству, в повышении надежности и увеличении ресурса работы изделия.
Поставленная задача достигается тем, что в регулируемой магнитодинамической опоре вертикального ротора, включающей подпятник на одном из концов ротора и магнитную систему, создающую знакопеременное периодически меняющееся в пространстве магнитное поле, например, на основе кольцевого постоянного многополюсного магнита с периодическим знакопеременным намагничиванием с одной стороны, а с другой стороны систему ротора либо статора, содержащую элемент с высокой электропроводностью, включая сверхпроводимость либо высокотемпературную сверхпроводимость, образующая поверхность кольцевого постоянного многополюсного магнита с периодическим знакопеременным намагничиванием, обращенная к элементу с высокой электропроводностью, включая сверхпроводимость либо высокотемпературную сверхпроводимость, имеет наклон под острым углом (0°<ά<90°) к нижнему торцу магнита в случае необходимого направления усилия разгрузки подпятника вверх либо к верхнему торцу магнита в случае необходимого направления усилия разгрузки подпятника вниз, а образующая поверхность элемента с высокой электропроводностью, включая сверхпроводимость либо высокотемпературную сверхпроводимость, параллельна образующей поверхности кольцевого постоянного магнита и имеет наклон под углом (90°-ά) к вертикальной оси ротора, при этом угол наклона образующей поверхности кольцевого постоянного многополюсного магнита (ά) определяется необходимой степенью разгрузки подпятника. Кроме того, в регулируемой магнитодинамической опоре вертикального ротора магнитная система может быть составлена из двух или нескольких систем, расположенных по высоте ротора, например из указанной системы, состоящей из кольцевого постоянного многополюсного магнита с периодическим знакопеременным намагничиванием и элемента с высокой электропроводностью, включая сверхпроводимость либо высокотемпературную сверхпроводимость, и симметричной ей такой же системы относительно общей плоскости симметрии в единой конструкции, причем системы расположены либо вплотную друг к другу, либо разнесены по концам ротора, при этом образующие поверхности сопряженных кольцевых постоянных многополюсных магнитов с периодическим знакопеременным намагничиванием составляют тупой выпуклый угол или тупой вогнутый угол. Кроме того, под нижним торцом кольцевого постоянного многополюсного магнита с периодическим знакопеременным намагничиванием может быть размещено упругое звено, например пружина, обеспечивающая усилие, большее, чем масса кольцевого постоянного многополюсного магнита с периодическим знакопеременным намагничиванием, но меньшее, чем усилие взаимодействия кольцевого постоянного многополюсного магнита с периодическим знакопеременным намагничиванием и элемента с высокой электропроводностью, включая сверхпроводимость либо высокотемпературную сверхпроводимость. Кроме того, регулируемая магнитодинамическая опора вертикального ротора может быть выполнена с кольцевым постоянным многополюсным магнитом с периодическим знакопеременным намагничиванием, набранным из колец разных толщин и диаметров. Кроме того, регулируемая магнитодинамическая опора вертикального ротора может быть выполнена с кольцевым постоянным многополюсным магнитом с периодическим знакопеременным намагничиванием, сформированным из отдельных сегментов, удерживаемых кольцевым магнитопроводом.
Изобретение поясняется чертежами.
На фиг.1 - продольный разрез ротора с магнитодинамической опорой.
На фиг.2 - вид А-А фиг.1.
На фиг.3 - трехмерный разрез ротора с разнесенными по концам магнитодинамическими опорами.
На фиг.4 - узел I фиг.1.
На фиг.5…9 - варианты выполнения опор.
На фиг.10 представлен качественный расчет распределения магнитной индукции многополюсной магнитной системы на фиг.9, включающей в себя кольцевой многополюсный магнит 16, магнитопровод 17 и элемент с высокой электропроводностью 5.
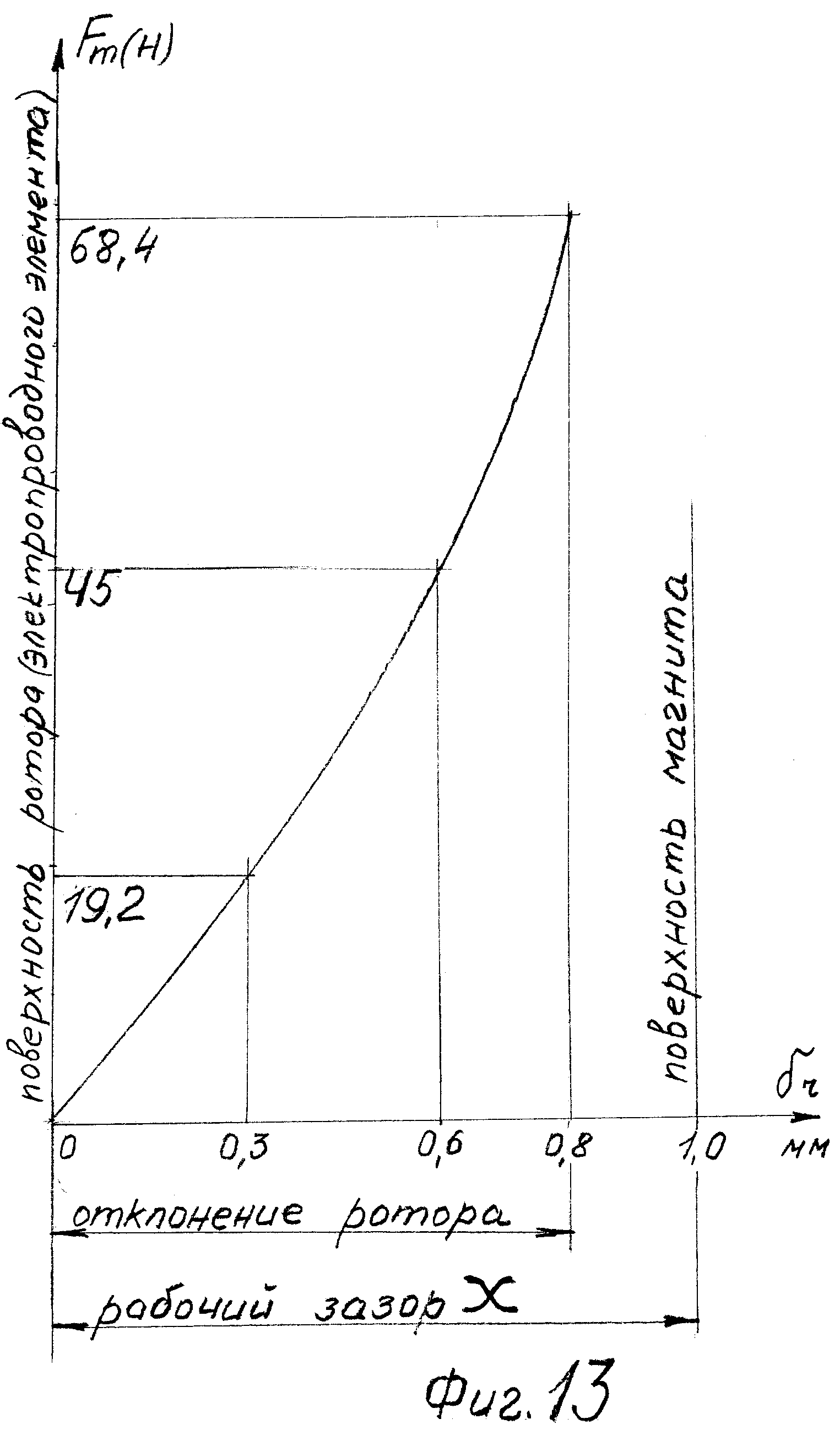
На фиг.11 представлен график значений магнитной индукции в пространстве между кольцевым многополюсным магнитом 16 и элементом с высокой электропроводностью 5 по расчету на фиг.10 (dB - изменение индукции в пределах рабочего зазора 0,25…0,42, т.е. более чем в 1,6 раза, при этом усилие взаимодействия изменяется в 3 раза - см. фиг.13).
На фиг.12 представлена эпюра распределения магнитных полей многополюсной магнитной системы фиг.9.
На фиг.13 представлен график зависимости усилия взаимодействия Fm |по модулю| (см. фиг.4) многополюсной магнитной системы и элемента с высокой электропроводностью при различных значениях отклонений ротора в динамике dr при длине зоны взаимодействия 10 мм.
На фиг.1 вертикальный ротор 1 опирается на подпятник 2 и в статике удерживается в вертикальном положении установочным магнитным подшипником в виде кольцевого постоянного магнита 3, установленного неподвижно, и ферромагнитной цапфы 4, закрепленной на роторе 1, при этом частично разгружается подпятник 2. На цапфе 4 ротора 1 установлен элемент с высокой электропроводностью (втулка 5) из немагнитного материала, находящийся внутри кольцевого постоянного многополюсного магнита 6 с периодическим знакопеременным намагничиванием соосно с ним, при этом образующая этого элемента (втулки 5) параллельна образующей магнита 6, имеющей наклон под углом (0°<ά<90°) к нижнему торцу кольцевого постоянного многополюсного магнита.
На фиг.5 магнитная система состоит из кольцевого постоянного многополюсного магнита 6 и симметричного ему относительно плоскости симметрии 0-0 магнита 7, сопряженные образующие которых составляют тупой выпуклый угол. Элементы с высокой электропроводностью 5 и 8 также симметричны относительно оси 0-0, а их образующие параллельны образующим магнитов 6 и 7.
На фиг.6 магнитная система состоит из кольцевого постоянного многополюсного магнита 11 и симметричного ему относительно плоскости симметрии 0-0 магнита 12, сопряженные образующие которых составляют тупой вогнутый угол. Элементы с высокой электропроводностью 9 и 10 также симметричны относительно оси 0-0, а их образующие параллельны образующим магнитов 11 и 12. Под нижним торцом магнита 12 размещено упругое звено, например, в виде пружины 13.
На фиг.7 - магнитная система по фиг.4 с упругим звеном в виде пружины 14 под нижним торцом магнита 6.
На фиг.8 - магнитная система с кольцевым постоянным многополюсным магнитом 15, набранным из колец разных толщин и диаметров, при этом образующей, создающей угол необходимой разгрузки, является прямая, соединяющая выступы колец.
На фиг.9 - кольцевой постоянный многополюсный магнит сформирован из отдельных сегментов 16, удерживаемых кольцевым магнитопроводом 17.
На фиг.10…13 представлены графики распределения индукций и сил взаимодействия в магнитных системах, полученные расчетным путем.
Регулируемая магнитодинамическая опора вертикального ротора работает следующим образом.
В статике ротор удерживается в вертикальном положении установочным магнитом 3 и цапфой 4, при этом частично разгружается подпятник 2 с усилием Fуст. При вращении ротора в элементе с высокой электропроводностью - втулке 5, находящейся внутри периодически намагниченного кольцевого магнита 6, возникают вихревые токи, поле которых направлено против отклоняющегося ротора при его колебаниях в квадратичной зависимости от изменения зазора и в пропорциональной от числа периодов магнита и от числа оборотов ротора. Поэтому можно достичь очень больших величин силы импульса, направленного против смещения ротора, и широкой возможности его регулировки и частично использовать эту силу для разгрузки подпятника. Для этого образующая поверхность кольцевого постоянного многополюсного магнита, обращенная к элементу с высокой электропроводностью, включая сверхпроводимость либо высокотемпературную сверхпроводимость, имеет наклон под острым углом (0°<ά<90°) к нижнему торцу магнита в случае направления усилия разгрузки вверх, а образующая поверхность элемента с высокой электропроводностью, включая сверхпроводимость либо высокотемпературную сверхпроводимость, параллельна образующей магнита и имеет наклон под углом (90°-ά) к вертикальной оси ротора. Наоборот при необходимости направления усилия разгрузки вниз образующая поверхность магнита имеет наклон под острым углом к верхнему торцу магнита. При разгоне ротор может изменять свою длину и образующая элемента с высокой электропроводностью становится непараллельной образующей магнита, их взаимодействие нелинейно, а давление на подпятник растет. Для исключения этого под нижним торцом магнита размещено упругое звено, например пружина, обеспечивающая усилие, большее, чем масса кольцевого магнита, но меньшее, чем усилие взаимодействия магнита и элемента с высокой электропроводностью, включая сверхпроводимость либо высокотемпературную сверхпроводимость. При удлинении ротора пружина автоматически поднимает кольцо магнита и обеспечивает постоянство рабочего зазора X=Const (фиг.4 и фиг.7) и неизменность давления на подпятник. При этом пружина дополнительно демпфирует колебания ротора, включая осевые колебания.
При наклоне образующей магнита возникает осевая составляющая усилия взаимодействия многополюсного магнита и элемента с высокой электропроводностью, определяемая по формуле:
Fs=FmSinά, при этом
Fr=FmCosά - радиальная составляющая усилия, где ά - угол наклона образующей, Fm - усилие взаимодействия |по модулю|, полученное расчетным путем на длине взаимодействия 10 мм (см. график фиг.13).
Таким образом, необходимую величину разгрузки подпятника можно обеспечить, меняя угол наклона образующей кольца магнита. При этом одновременно происходит гашение всех колебаний ротора, в том числе ориентированно осевых колебаний.
При составлении двух магнитов вплотную (см. фиг.5 и фиг.6) либо разнесенными по концам ротора (см. фиг.3) при положении магнитов на оси 0-0 имеется равновесие усилий F=F1. При перемещении ротора вверх рабочий зазор в нижнем магните уменьшается, усилие от взаимодействия поля вихревых токов в нижнем элементе с высокой электропроводностью с нижним многополюсным магнитом возрастает в квадратичной зависимости от зазора и стремится вернуть ротор к положению 0-0. Наоборот при перемещении ротора вниз усилие от взаимодействия верхнего магнита с полем вихревых токов в верхнем элементе с высокой электропроводностью стремится вернуть ротор к нейтральному положению 0-0 (см. фиг.5).
При схеме расположения магнитов по фиг.6 при перемещении ротора вниз равновесие восстанавливает нижний магнит, а при перемещении вверх - верхний.
При установке под нижним торцом магнита упругого элемента - пружины, создающей усилие, равное массе ротора (Fпр.=Gрот) будет обеспечено условие левитации ротора. При задании усилия пружины, меньшего, чем масса ротора, может быть задана требуемая величина давления на подпятник, т.к. магниты «просядут» на пружине на величину, вызывающую изменение рабочего зазора, обеспечивающего требуемую разгрузку подпятника, вплоть до левитации ротора.
На представленных на фиг.8 и фиг.9 наборах колец упрощается процесс изготовления и намагничивания магнитов, что может быть выгодно при серийном производстве магнитных систем.
Предлагаемая регулируемая опора вертикального ротора обеспечивает значительное уменьшение давления на подпятник в динамике до любой требуемой степени разгрузки, вплоть до левитации ротора, гашение всех видов колебаний ротора, в том числе ориентированное на осевые колебания, высокую радиальную жесткость в динамике, простоту конструкции и пригодность к серийному производству, повышение надежности и увеличение ресурса работы изделия.
Реферат
Изобретение относится к машиностроению и преимущественно к магнитным опорам высокооборотных роторов с вертикальной осью вращения, например роторов - накопителей энергии, центрифуг, гироскопов и подобных устройств. Опора включает подпятник на одном из концов ротора и магнитную систему, создающую знакопеременное периодически меняющееся в пространстве магнитное поле, например, на основе кольцевого постоянного многополюсного магнита с периодическим знакопеременным намагничиванием с одной стороны, а с другой стороны систему ротора либо статора, содержащую элемент с высокой электропроводностью, включая сверхпроводимость либо высокотемпературную сверхпроводимость. Образующая поверхность магнита, обращенная к элементу, имеет наклон под острым углом (0°<ά<90°) к нижнему торцу магнита необходимого направления усилия разгрузки подпятника вверх либо к верхнему торцу магнита необходимого направления усилия разгрузки подпятника вниз. Образующая поверхность элемента параллельна образующей поверхности магнита и имеет наклон под углом (90°-ά) к вертикальной оси ротора. Угол наклона образующей магнита (ά) определяется необходимой степенью разгрузки подпятника. Технический результат: значительное уменьшение давления на подпятник в динамике до любой требуемой степени разгрузки подпятника, вплоть до левитации ротора, гашение всех видов колебаний ротора, в том числе ориентированное на осевые колебания, высокая радиальная жесткость в динамике, простота конструкции и пригодность к серийному производству, повышение надежности и увеличение ресурса работы изделия. 4 з.п. ф-лы, 13 ил.
Формула
Документы, цитированные в отчёте о поиске
Магнитная опора для стабилизации положения вала

Комментарии