Способ регулирования уровня колебания в подвесках тягового двигателя электровоза и устройство для его осуществления - RU2704637C1
Код документа: RU2704637C1
Чертежи
Описание
Изобретение относится к транспортному машиностроению и может быть использовано при улучшении существующих конструктивно-технических решений, используемых при подвешивании тяговых электродвигателей к раме тележки локомотива.
Тяговые двигатели электровозов, надежность их работы и безопасности эксплуатации во многом требуют особого внимания в решении задач эффективности использования подвижного состава. Динамике тяговых двигателей и его основных узлов посвящены фундаментальные исследования отечественных ученых Меделя В.Б., Карасева М.Ф., Пахомова М.П., Авилова В.Д., Исмаилова Ш.К. и др. Вопросам диагностики тяговых двигателей и его основных узлов рассмотрены в работах Харламова В.В., Серебренникова В.А., Смирнова В.П. и др.
Тяговый двигатель является одним из основных узлов электровоза и может рассматриваться как фрагмент сложной механической колебательной системы со многими степенями свободы. Вместе с тем, тяговый двигатель в задачах динамики может рассматриваться как автономный узел с проявлением специфических динамических свойств (Галиев И.И., Нехаев В.А., Николаев А.В., Харламов В.В.). Динамика тягового двигателя с опорно-осевой подвеской наиболее детально изучена и результаты исследований нашли отражение в практических разработках по повышению надежности работы его основных узлов, в том числе и коллекторно-щеточного узла. Как показали исследования динамики тягового двигателя, то есть параметры его колебательных движений оказывают существенное влияние на работу двигателя в целом, затрагивая и электромагнитные стороны динамических взаимодействий элементов.
Защита тягового двигателя электровоза учитывает особенности конструктивно-технических решений о закреплении двигателя с рамой, наличие дополнительных связей, введение ограничителей движений и демпфирующих устройств, динамических гасителей колебаний и др. [1-3].
В задачах динамики тяговый двигатель электровоза чаще всего рассматривается в упрощенных представлениях и его расчетная схема формируется как механическая колебательная система с двумя степенями свободы. Тяговый двигатель, как объект, динамическое состояние которого оценивается, в такого рода подходах представляется как твердое тело, совершающее плоские колебательные движения и опирается через упругие элементы на опорные поверхности. Внешние воздействия, передающиеся на объект, могут быть силовыми или кинематическими возмущениями. Уровень внешних воздействий (их форма и частотный состав) имеет большое значение и зависит от скорости движения электровоза, состояния рельсового пути и подвески тягового двигателя. В процессе патентного поиска в направлениях усовершенствования подвесок тягового двигателя, повышения эффективности их применения, снижения уровня динамических воздействий и регулирования динамического состояния, в целом, и по отдельным задачам выявлен ряд изобретений-аналогов.
1. Известно изобретение [Воробьев В.И., Антипин Д.Я., Космодамианский А.С., Измеров О.В., Воробьев Д.В., Маслов М.А. «Узел подвешивания тягового электродвигателя», патент №176844 U1, МПК В61С 9/38, приоритет 30.01.2018], содержащий подшипниковые опоры для опирания на ось колесной пары и поводок, концами посредством сайлент-блоков связанный с корпусом двигателя и рамой тележки, при этом один из сайлент-блоков связан с вилкой, которая посредством шлицевых соединений связана с торсионами, каждый из которых опирается на раму тележки через цилиндрическую опору, расположенную со стороны соединения торсионов с вилкой, и опору со шлицевым соединением, расположенную на концах торсионов, противоположных соединению торсионов с вилкой, отличающийся тем, что другой из сайлент-блоков связан с вилкой, которая посредством шлицевых соединений связана с торсионами, каждый из которых связан с корпусом двигателя через цилиндрическую опору, расположенную со стороны соединения торсионов с вилкой, и опору со шлицевым соединением, расположенную на концах торсионов, противоположных соединению торсионов с вилкой.
К недостаткам данного изобретения можно отнести отсутствие в конструкции средств автоматического регулирования динамического состояния тягового электродвигателя.
2. Известно изобретение [Сливинский Е.В., Зайцев А.А., Бушмин А.А. «Тяговый привод локомотива», патент №2255014 С1, МПК В61С 9/48, B61F 3/00, B61F 17/02, приоритет 27.06.2005], представляющее собой тяговый привод локомотива, состоящий из электродвигателя, навешенного на пустотелую ось колесной пары с помощью моторно-осевых подшипников, отличающийся тем, что в пустотелой оси колесной пары находится смазка, в стенках пустотелой оси колесной пары в зоне контакта ее шеек с вкладышами моторно-осевых подшипников выполнены радиально расположенные каналы, переходящие в пазы на наружной поверхности шеек, изменяющиеся по своей длине в продольной плоскости колесной пары по глубине и ширине, в средней части оси колесной пары выполнен дополнительный радиальный канал для подачи смазки в пустотелую ось, снабженный обратным клапаном, а во внутренней полости оси подвижно размещены два плунжера, каждый из которых подпружинен пружиной сжатия относительно заглушек, установленных по торцам упомянутой оси колесной пары.
Недостатками рассмотренного аналога являются отсутствие конструктивных решений для реализации автоматического регулирования динамического состояния тягового электродвигателя, а также отсутствие средств для предотвращения боксования.
Известен способ управления взаимным положением тягового двигателя и колесной пары рельсового транспортного средства [Бирюков И.В., Усманов Х.Г., Долгачев Н.И., Серх Д.И., Львов Н.В., Рыбников Е.К., Крушев С.Д. «Способ управления взаимным положением тягового двигателя и колесной пары рельсового транспортного средства», патент №2032566 С1, МПК В61С 9/44, приоритет 10.04.1995], заключающийся в компенсации взаимного перемещения колесной пары и охватывающего ее ось полого вала тягового двигателя, соединенных тяговыми муфтами с упругими элементами, отличающийся тем, что компенсацию перемещения на определенную величину по вертикали колесной пары осуществляют смещением в той же плоскости, на ту же величину и в том же направлении двигателя с помощью рычажной системы, управляемой закрепленным на раме транспортного средства гидроцилиндром, связанным с блоком измерения указанных перемещений.
К недостаткам рассмотренного изобретения можно отнести отсутствие в конструкции для предотвращения боксования колесной пары, а также отсутствие учета влияния внешних возмущения на динамическое состояние тягового двигателя.
В качестве прототипа принимается способ защиты от боксования и юза колесных пар электроподвижного состава с вентильно-индукторным электроприводом [Кононов ГН., Киреев А.В. «Способ защиты от боксования и юза колесных пар электроподвижного состава с вентильно-индукторным электроприводом», патент №2283783 С1, МПК B60L 3/10 В61С 15/12, приоритет 20.09.2006], заключающийся в том, что при возникновении боксования (юза) одной или нескольких колесных пар и изменении сигналов, пропорциональных ускорению (замедлению) колесных пар, до заданного уровня вырабатывают управляющие сигналы, отличающийся тем, что при достижении сигналами, пропорциональными ускорению (замедлению) колесных пар, заданного значения вырабатывают управляющие сигналы, изменяющие режимы работы систем электропривода, связанных с боксующими (юзующими) колесными парами, режим управления двигателями по положению ротора изменяют на синхронный режим путем фиксации частоты тока в обмотках двигателя на значении, существующем в момент появления управляющего сигнала, а восстановление режима управления по положению ротора производят при достижении углом нагрузки двигателя заданного значения.
Недостатками данного способа являются отсутствие контроля связности внешних возмущений, влияющих на динамику тягового электродвигателя.
Задачей предлагаемого изобретения является регулирование связности внешних воздействий в подвеске тягового электродвигателя локомотива за счет изменения приведенной жесткости системы.
Способ регулирования уровня колебаний в подвесках тягового двигателя электровоза, заключающийся в том, что фиксируют предельные значения амплитуд колебаний тягового электродвигателя, отличающийся тем, что при достижении предельного значения амплитуд колебаний изменяют жесткость двух пневмобаллонов, расположенных на тяговом электродвигателе, путем подкачки или стравливания воздуха, тем самым изменяют приведенную жесткость системы и уменьшают влияние на тяговый двигатель трех внешних возмущений, возникающих из-за контакта тележек локомотива с верхним строением пути, кузовом вагона и ее конструктивных особенностей.
Устройство для реализации способа по п. 1, отличающееся тем, что тяговый электродвигатель снабжен двумя пневмобаллонами с каналами для подкачки воздуха и управляемыми дросселями для стравливания, позволяющими регулировать связность между тремя внешними возмущениями, возникающих из-за контакта тележек локомотива с верхним строением пути, кузовом вагона и конструкции ее конструктивных особенностей и действующими на тяговый двигатель, за счет изменения приведенной жесткости системы.
Суть изобретения поясняется чертежами.
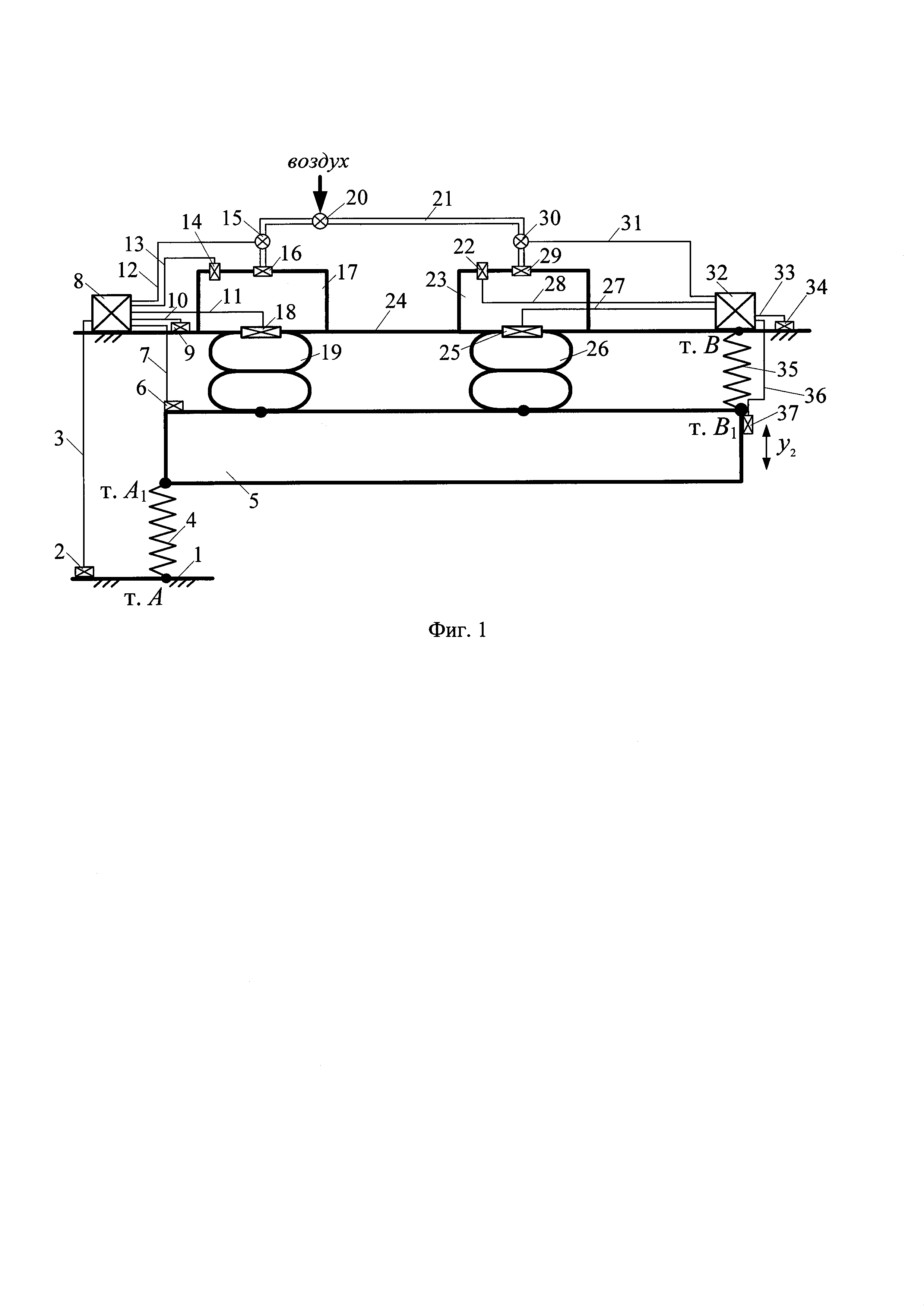
На фиг. 1 представлена принципиальная схема системы подвески тягового двигателя с возможностями управления параметрами динамического состояния системы со следующими обозначениями: Рабочий орган 5 в виде твердого тела с массой М и моментом инерции J опирается на поверхность 1 через упругий элемент 4 жесткостью k1, закремленный соответственно в тт.(А) и (А1). Второй конец рабочего органа 5, связан с опорной поверхностью 24, создаваемой рамой тележки электровоза. Между рабочим органом (корпусом тягового двигателя) установлены деформируемые пневмоблоки 19, 26, жесткости которых k2 и k3 могут меняться в зависимости от управляющих сигналов, поступающих от блоков управления 8, 32. Пневматические баллоны 19 и 26 имеют регулируемые дроссели 18 и 25, которые через коммуникации 11 и 27 связаны с блоками управления 8 и 32 соответственно. Для сброса давления в жестких камерах 17 и 23, установленных на опорной поверхности 24, также предусматриваются клапаны сброса давления 14 и 22, управляемые соответственно блоками 8 и 32 через каналы связи 13 и 28 соответственно. Жесткие камеры 17 и 23 связаны коммуникациями по воздуховодами 20 и 21 с источником сжатого воздуха с рессивером. Подача сжатого воздуха регулируется управляемыми дросселями 15, 30 через коммуникации 12, 31 блоков управления 8, 32 соответственно. Динамическое состояние технического объекта контролируется датчиками 2, 6, 9, 34, 37, которые коммуникациями 3, 7, 10, связаны с блоком управления 8, а коммункациями 33, 36 - связаны с блоком управления 32.
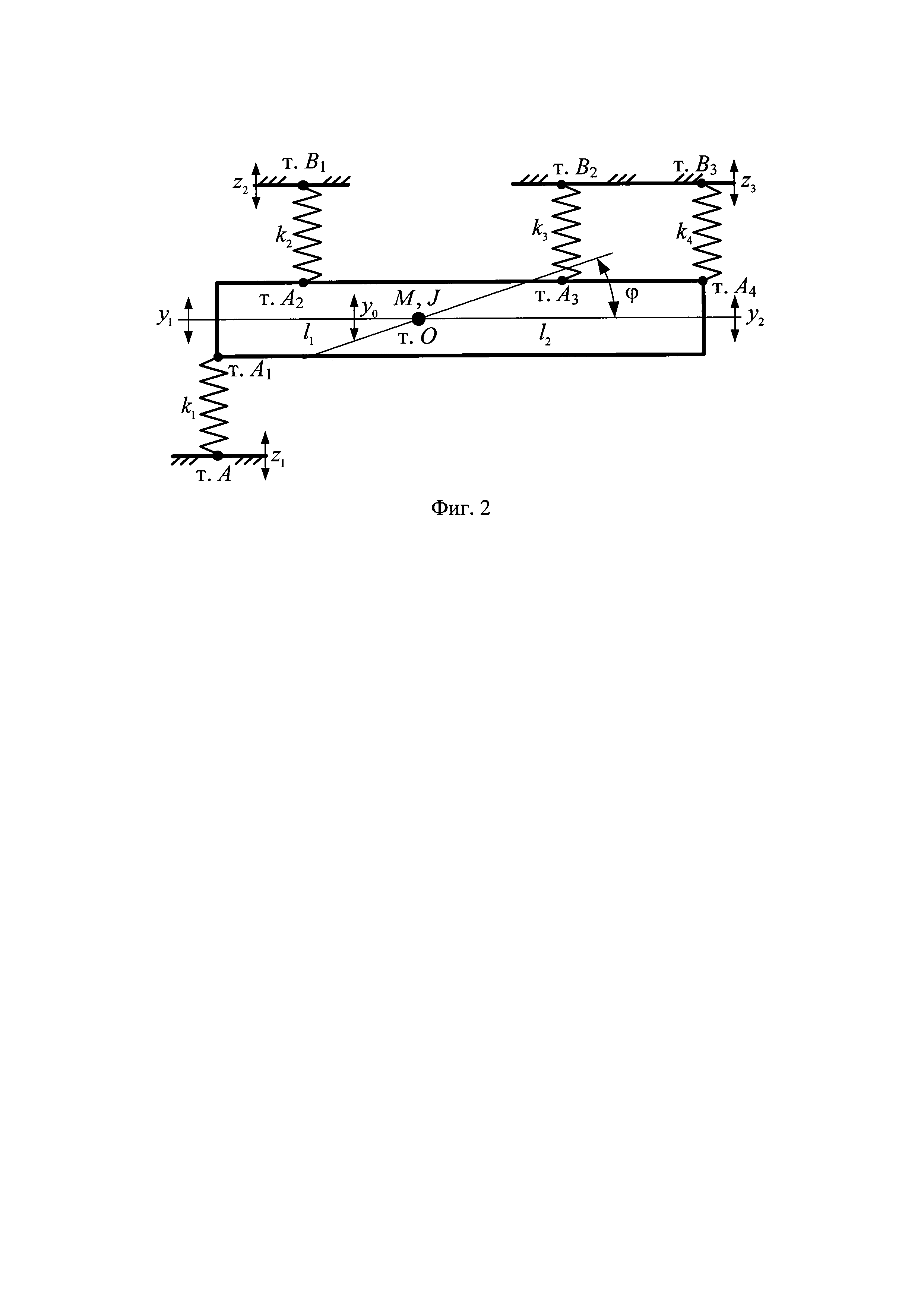
Фиг. 2 иллюстрирует расчетную схему подвески тягового двигателя при кинематическом внешнем возмущении.
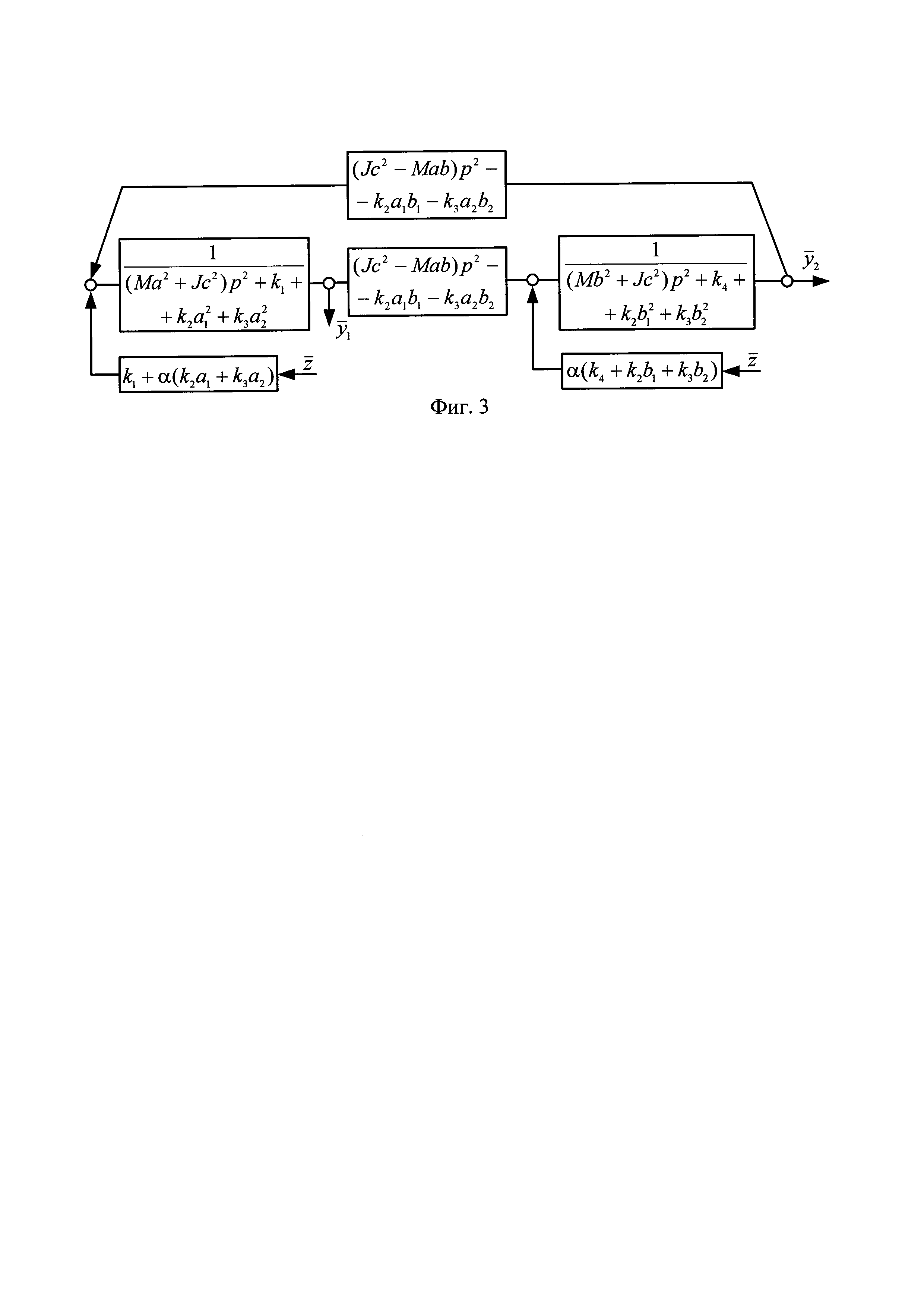
На фиг. 3 показана структурная математическая модель (структурная схема) системы по фиг. 2.
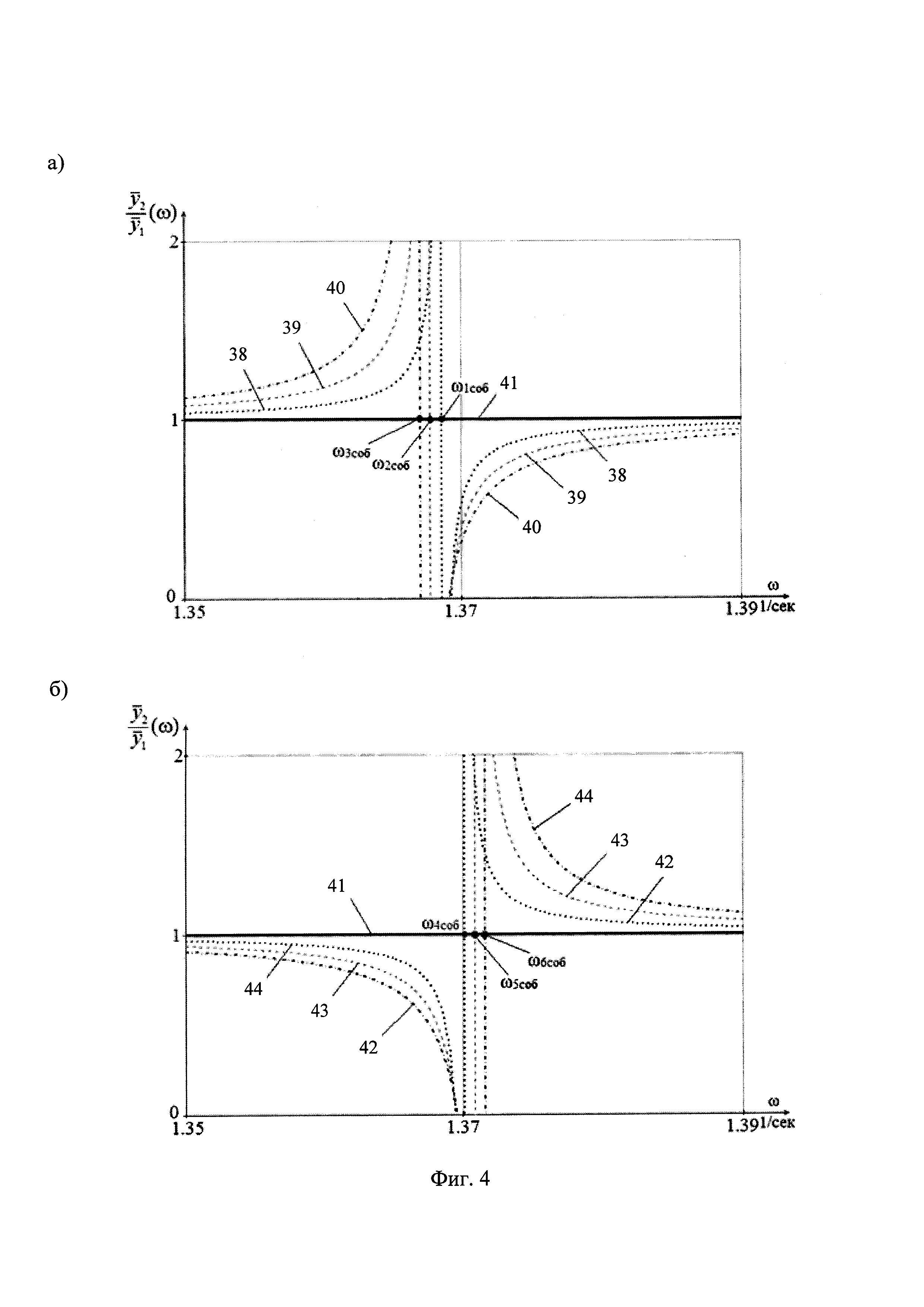
На фиг. 4, а приведено семейство амплитудно-частотных характеристик межпарциальных связей; графики, обозначенные 38 представленной собой кривые при k3=1490 кН/м; график 39 - k3=1480 кН/м; график 40 - k3=1470 кН/м; график, отмеченный как 41 соответствует режиму работы при

Предлагаемый способ регулирования связности внешних возмущений как фактора влияния на динамическое состояние подвески тягового двигателя, опирается на динамические эффекты, возникающие в механических колебательных системах при одновременном совместном действии синфазных гармонических воздействий.
Если учитывать возможности соотношения между амплитудами внешних воздействий, как некоторый коэффициент связности внешних возмущений, то такой коэффициент приводит к существенным изменениям динамических состояний, оказывая влияние на распределение амплитуд колебаний по объекту, частоты режимов динамического гашения, структуру вибрационного поля и др. В связи с этим возможность изменения коэффициента связности можно рассматривать как настроечный параметр, решая локальные задачи динамики подвески тягового двигателя.
Изобретение работает следующим образом.
Предлагаемый способ регулирования связности внешних воздействий в подвесках тягового двигателя электровоза и устройство для его осуществления реализуется с помощью технической системы, принципиальная схема которой приведена на фиг. 1. Рабочий орган 5 в виде твердого тела с массой М и моментом инерции J опирается на поверхность 1 через упругий элемент 4 жесткостью k1, закремленный соответственно в тт.(А) и (A1). Второй конец рабочего органа 5, связан с опорной поверхностью 24, создаваемой рамой тележки электровоза. Между рабочим органом (корпусом тягового двигателя) установлены деформируемые пневмоблоки 19, 26, жесткости которых k2 и k3 могут меняться в зависимости от управляющих сигналов, поступающих от блоков управления 8, 32. Пневматические баллоны 19 и 26 имеют регулируемые дроссели 18 и 25, которые через коммуникации 11 и 27 связаны с блоками управления 8 и 32 соответственно. Для сброса давления в жестких камерах 17 и 23, установленных на опорной поверхности 24, также предусматриваются клапаны сброса давления 14 и 22, управляемые соответственно блоками 8 и 32 через каналы связи 13 и 28 соответственно. Жесткие камеры 17 и 23 связаны коммуникациями по воздуховодами 20 и 21 с источником сжатого воздуха с рессивером. Подача сжатого воздуха регулируется управляемыми дросселями 15, 30 через коммуникации 12, 31 блоков управления 8, 32 соответственно. Динамическое состояние технического объекта контролируется датчиками 2, 6, 9, 34, 37, которые коммуникациями 3, 7, 10, связаны с блоком управления 8, а коммункациями 33, 36 - связаны с блоком управления 32.
Система работает при действии возмущающих факторов, которые обозначены через z1, z2 и z3. Возмущение z1 отражает действие неровной рельсового пути, которые во многих случаях отличаются периодичностью, в которой частота колебаний достаточно тесно связана со скоростью движения. Верхняя опорная поверхность 24 связана с рамой тележки электровоза и в общем случае, имеет связи или контактирует с рамой электровоза. В этом случае движения z2 и z3 можно рассматривать как достаточно автономные (или независимые) по отношению к колебаниям z2, z3. Что касается движения по координатам z2 и z3, то они определяются особенности вибраций рамы тележки. В целом параметры движений z1, z2 и z3 связаны между собой, что определяется через коэффициент связности внешних воздействий. В случаях близости частот возмущающих факторов коэффициент связности колебаний может рассматриваться и как некоторая постоянная положительная или отрицательная величина.
Блок управления, представленный элементами 8 и 32 имеет процессор, который ведет обработку информации о динамическом состоянии объекта, определяемом с помощью датчиков в случаях выхода ситуации за нормативные уровни вносит управляющие сигналы, которые изменяют динамические жесткости системы и стабилизируют колебания объекта. В стациарном режиме при равномерном уровне вибрационных воздействий пневмосистема может работать как система двух последовательных соединений пружин при низких частотах с последующими переходами к работе только на деформируемых пневмобаллонах 19, 26, входящих в общую упругую структуру, образуемую упругими элементами k1, k2, k3 и k4. Управление таким образом подвески может обрабатывать выход из автоколебательных режимов, срывов тяги из-за проскользывания в системы колес с рельсом или при возникновении динамических выбросов в системе электропитания тягового двигателя.
Теоретическое обоснование работы подвески представлено в следующем разделе.
Теоретическое обоснование
Расчетная схема подвески с возможностями регулирования связности внешних воздействий может быть представлена в виде механической колебательной системы с двумя степенями свободы. Тяговый двигатель в системе подвески отображается твердым телом (масса М, момент инерции J), контактирующим через упругие элементы k1, k2, k3, k4 с опорными поверхностями 1 и 24, как показано на фиг. 2.
Предполагается, что система обладает линейными свойствами и совершает малые колебания, относительно положения статического равновесия, движения системы рассматриваются в системах координат y1, y2 и y0, ϕ в неподвижном базисе. Расстояния от точек крепления упругих элементов тт.(A1), (А2), (А3) определяются длинами плеч


Для составления математической модели системы запишем выражения для кинетической и потенциальной энергий


Между координатами y1, y2 и y0, ϕ имеются соотношения:

После ряда преобразований система уравнений движения может быть записана


Здесь

После преобразований Лапласа при нулевых начальных условиях, система уравнений (4), (5) может быть представлена в операторной форме. Коэффициенты уравнений для такого случая приведены в таблице 1.
Коэффициенты уравнений (4), (5) в координатах y1, y2 при кинематическом возмущении

Примечание: p=jω - комплексная переменная


На основании уравнений (4), (5) может быть построена структурная математическая модель в виде структурной схемы (фиг. 3) эквивалентной в динамическом отношении системы автоматического управления.
На основе структурной схемы можно построить передаточные функции системы:



где

- частотное характеристическое уравнение системы.
Настроечные параметры а1, b1, а2, b2, в них меняются

Из выражения (8) следует также, что числитель может принимать «нулевые» значения при частоте

В свою очередь, знаменатель (8), также может принимать нулевые значения на частоте

Можно отметить, что при p→0 и p→∞ выражение (8) имеют пределы


На фиг. 4 приводятся амплитудно-частотные характеристики межпарциальных связей. Используется модельная задача; приводятся данные для расчетов а=0.4; b=0.6; с=1; М=1000 кг; J=400 кг.м2; k1=1000 кН/м; k2=1000 кН/м; k4=1500 кН/м; α=1. Графики зависимостей
На фиг. 4 графики зависимостей
Список литературы
1. Смалев А.Н. Улучшение показателей динамических качеств локомотива на основе модернизации рессорного подвешивания и совершенствования методики его расчета: диссертация... кандидата технических наук: 05.22.07 / Смалев Александр Николаевич; [Место защиты: Ом. гос. ун-т путей сообщ.]. - Омск, 2011, - 172 с.
2. Минжасаров М.Х. Повышение динамических качеств локомотива совершенствованием буксовой ступени рессорного подвешивания: диссертация… кандидата технических наук: 05.22.07 / [Место защиты: Ом. гос. ун-т путей сообщ.]. - Омск, 2016. - 166 с.
3. Харламов В.В. Совершенствование методов и средств диагностирования технического состояния коллекторно-щеточного узла тяговых электродвигателей подвижного состава: 05.22.07 / [Место защиты: Ом. гос. ун-т путей сообщ.]. - Омск, 2002. - 376 с.
Реферат
Группа изобретений относится к гашению колебаний в подвесках тягового двигателя электровоза. Способ регулирования уровня колебаний в подвесках тягового двигателя электровоза заключается в том, что фиксируют предельные значения амплитуд колебаний тягового электродвигателя, и при достижении предельного значения амплитуд колебаний изменяют жесткость двух пневмобаллонов путем подкачки или стравливания воздуха. Также заявлено устройство для реализации вышеуказанного способа, содержащее два пневмобаллона, расположенные на тяговом электродвигателе, с каналами для подкачки воздуха и управляемыми дросселями для стравливания. Технический результат заключается в снижении влияния на тяговый двигатель трех внешних возмущений. 2 н.п. ф-лы, 4 ил.
Комментарии