Способ и узел для поглощения энергии от нагрузок, действующих во время события избыточной нагрузки, с целью предотвращения повреждения - RU2683126C2
Код документа: RU2683126C2
Чертежи


Описание
Настоящее изобретение относится к способу поглощения или рассеивания энергии для демпфирования нагрузок, действующих во время события избыточной нагрузки, в частности, на грузовой блок для перевозки объектов, чтобы обеспечить защиту от повреждений перевозимых объектов, таких как люди или материальные ценности. Таким одиночным событием избыточной нагрузки, влекущим за собой выделение энергии, является взрыв мины.
Из уровня техники хорошо известны способы поглощения энергии в целях снижения нагрузок во время событий избыточных нагрузок, например, в частности, во время взрывов под днищем бронированных транспортных средств, для обеспечения защиты перевозимых объектов и, в частности, людей и чувствительных к повреждениям устройств. Для обеспечения такой защиты обычно используют механические системы, которые поглощают энергию за счет изменения формы или конфигурации таким образом, чтобы поглотить энергию и обезопасить пассажиров во время события избыточной нагрузки.
Присущий известным системам недостаток заключается в том, что невозможно управлять поглощением или демпфированием энергии во время события избыточной нагрузки с неизвестными силой импульса и продолжительностью импульса. Силу и продолжительность импульса, вызванного взрывами мин, невозможно спрогнозировать до взрыва, так как тип и мощность мины, расположение, точная позиция, глубина в грунте, а также окружающий мину материал заранее не известны во время реального события избыточной нагрузки. Мониторинг и анализ скорости или других параметров транспортного средства, предшествующих началу события избыточной нагрузки, т.е. взрыву мины, не позволяют оценить мощность взрыва. Следовательно, событие избыточной нагрузки в контексте настоящего изобретения не позволяет точно спланировать процесс поглощения энергии до начала этого события избыточной нагрузки.
В документе WO 2011/141164 А1 раскрыт способ управления поглотителем энергии рулевой колонки, в котором датчик выдает значения относительной скорости компонентов поглотителя энергии, которые выполнены подвижными относительно друг друга. После этого поглотителем энергии управляют таким образом, что замедление характеризуется наиболее постоянными и наименее возможными значениями для того, чтобы, в конце перемещения подвижных частей поглотителя энергии, их относительная скорость приближалась к нулю. Кроме того, в этом документе также говориться о возможности использования такого поглотителя энергии с устройствами ремней безопасности, с сиденьями с противоминной защитой, в бамперах, станках, аэрофинишерах для посадки самолетов на авианосцы, демпфирующих системах для вертолетов и демпфирующих системах для обуви. Указанный способ управления поглотителем энергии, при котором в конце движения компонентов поглотителя энергии, подвижных относительно друг друга, относительное движение замедлится до нуля, может быть осуществлен только тогда, когда известны граничные параметры. Если транспортное средство, движущееся по дороге, врезается в заднюю часть находящегося впереди его автомобиля, то относительная скорость непосредственно известна и весь вертикальный ход может быть оптимально использован для управления замедлением относительного перемещения. Это также справедливо в случае аэрофинишера для посадки самолетов на авианосцы и даже в случае падения вертолета, при котором предварительно известны высота и скорость падения.
Во всех практических применениях оптимально используют максимальный рабочий ход для обеспечения наименее возможных нагрузок, например, чтобы во время автомобильной аварии на водителя воздействовали наименее возможные нагрузки при ударе о рулевую колонку. Такая система хорошо подходит для управления поглотителем энергии, используемым для рулевых колонок или в других практических применениях, в которых значения скорости и, следовательно, возникающие нагрузки известны и доступный рабочий ход может быть коррелирован с текущей относительной скоростью.
В случае практического применения, например, в сиденьях с противоминной защитой, включающего неизвестную мощность взрыва во время события избыточной нагрузки, такого как взрыв мины под днищем бронированного транспортного средства, такая регулировка обеспечивает желаемые результаты только при слабом взрыве. Прикладываемые усилия могут быть ослаблены и переданы телу человека, сидящего на сиденье с противоминной защитой. При этом нагрузка может быть значительно снижена. Замедление или относительную скорость регулируют таким образом, чтобы на протяжении всего рабочего хода воздействовала постоянная и низкая нагрузка.
Этот способ требует знания начальных и граничных условий. Влияния внешних факторов, величина и продолжительность которых изначально неизвестны, могут привести к неожиданным результатам, так что демпфирование может быть слишком слабым или слишком сильным.
Следовательно, целью настоящего изобретения является создание способа и узла для демпфирования, которые обеспечивают лучшее управление в ходе событий избыточной нагрузки, при этом не все данные, необходимые для оптимального управления, являются доступными перед началом события избыточной нагрузки.
Поставленная цель достигается при помощи способа демпфирования, характеризующегося признаками, раскрытыми в пункте 1 формулы изобретения, а также узла, характеризующегося признаками, раскрытыми в пункте 15 формулы изобретения. Предпочтительные варианты осуществления настоящего изобретения раскрыты в зависимых пунктах формулы изобретения. Дополнительные преимущества и признаки могут быть взяты из описания сущности настоящего изобретения, а также описания приведенных в качестве примера вариантов осуществления.
Способ согласно настоящему изобретению используют для поглощения энергии во время события избыточной нагрузки и осуществляют, в частности, с использованием поглотителя энергии. В результате поглощения энергии снижают нагрузку, действующую на объект, перевозимый в грузовом блоке, во время события избыточной нагрузки.
В этом случае поглотитель энергии, в частности, хорошо подходит для поглощения энергии во время одиночного события избыточной нагрузки, характеризующегося настолько высоким выделением энергии, что существует вероятность или высокая вероятность, или очень высокая вероятность, или 100% вероятность того, что объект получит повреждения, при этом поглощение энергии, выполняемое поглотителем энергии, снижает нагрузки, воздействующие на объект в результате события избыточной нагрузки, чтобы предотвратить повреждение объекта. Иначе говоря, поглотитель энергии предпочтительно подходит для поглощения энергии во время одиночного события избыточной нагрузки, характеризующегося настолько высоким выделением энергии, что без использования поглотителя энергии нагрузки, действующие на перевозимый объект, превысят допустимое пороговое значение, так что указанное поглощение энергии, выполняемое поглотителем энергии, снижает нагрузку на объект, возникающую в результате события избыточной нагрузки.
Способ согласно настоящему изобретению, в частности, включает использование измерительного устройства, которое предпочтительно периодически регистрирует измеренные значения, относящиеся к текущему состоянию грузового блока. При этом блок управления обнаруживает событие избыточной нагрузки на основании зарегистрированных измеренных значений, и, по меньшей мере, непосредственно после обнаружения события избыточной нагрузки, демпфирование поглотителя энергии устанавливают равным весьма высокому значению и, в частности, равным высокому значению, которое ближе к максимальному значению, чем к минимально возможному значению демпфирования. Указанное демпфирование, установленное равным существенному или высокому значению, поддерживают в течение определенного периода времени. Предпочтительно, демпфирование является постоянным, однако в случае необходимости оно может и не быть постоянным. Демпфирование может быть подвергнуто естественным или случайным изменениям, например, при попытки уйти от постоянного значения. В любому случае в течение определенного периода времени демпфирование поддерживают существенным и, в частности, равным высокому значению. Определенный период времени рассчитывают таким образом, чтобы в ходе указанного определенного периода времени определить множество последовательных измеренных значений. По прошествии определенного периода времени управление поглотителем энергии и/или демпфированием осуществляют в зависимости от измеренных значений, зарегистрированных во время события избыточной нагрузки. Это взывает начальное повышение нагрузки, действующей на объекты, перевозимые в грузовом блоке, до определенной предельной нагрузки, и по прошествии определенного периода времени демпфированием управляют в зависимости от измеренных значений, зарегистрированных во время события избыточной нагрузки.
Определенный период времени, в частности, превышает 1 мс и предпочтительно превышает 3 мс, при этом он может длиться 4 мс, 5 мс, 6 мс, 7 мс или более.
Предлагаемый способ может быть осуществлен так, что демпфирование, осуществляемое поглотителем энергии, устанавливают равным высокому значению, по меньшей мере, непосредственно после начала события избыточной нагрузки и позже снижают, чтобы вначале повысить нагрузку на объекты, перевозимые в грузовом блоке, до определенной предельной нагрузки, а затем снизить ее. Указанное снижение осуществляют, в частности, для того, чтобы предотвратить превышение предельной нагрузки.
Способ включает поглощение или преобразование импульса или его энергии, воздействующей во время события избыточной нагрузки, чтобы снизить результирующую нагрузку на объект или перевозимый объект и предотвратить его повреждение при помощи поглотителя энергии, поглощающего, рассеивающего или преобразующего указанную энергию.
Способу согласно настоящему изобретению присущи несколько преимуществ. Одно существенное преимущество состоит в том, что демпфирование устанавливают высоким и, в частности, равным определенному высокому значению после обнаружения события избыточной нагрузки.
Кроме того, указанное определенное высокое значение может быть предварительно отрегулировано. Например, возможно, чтобы указанное высокое значение соответствовало базовой установке, при этом предусмотрено его активное снижение. На данный момент высокое значение демпфирование ближе к максимальному значению, чем к минимальному значению демпфирования. В частности, разность между высоким и максимальным значениями демпфирования по меньшей мере в два или четыре раза меньше разности между высоким и минимальным значениями демпфирования. Следовательно, в течение определенного периода времени изначально поглощают лишь небольшое количество энергии, так что возможное поглощение энергии по существу, почти полностью или полностью сохраняется и может быть осуществлено по прошествии определенного периода времени.
Изначально, указанное высокое значение будут приблизительно или, по меньшей мере, по существу, или точно поддерживать после обнаружения события избыточной нагрузки. При этом позвоночник человека, сидящего на поверхности грузового блока, идентифицированного в качестве, например, устройства для сидения, подвергается предварительному напряжению из-за удара, вызванного взрывом мины, так как поглотитель энергии настроен на высокое или максимальное демпфирование. В этом случае по существу невозможно какое-либо относительное перемещение поглотителя энергии. Таким образом, упрощается регулировка нагрузки на позвоночник, так как к изначально ненагруженному позвоночнику можно приложить предварительное напряжение. Нагрузку изначально увеличивают до определенной предельной нагрузки. Затем нагрузку поддерживают приблизительно равной определенной предельной нагрузке. После этого осуществляют снижение демпфирования поглотителя энергии с тем, чтобы произошло перемещение грузового блока или устройства для сидения относительно каркаса или корпуса транспортного средства. В результате этого нагрузка, действующая на позвоночник пользователя, сидящего на поверхности грузового блока, не выйдет за границы определенного порогового значения, а напротив будет оставаться постоянной или почти постоянной.
Настоящий способ значительно снижает риск нанесения травм пользователю, рассматриваемому в качестве перевозимого объекта. При этом в стандартных механических системах энергия моментально поглощается механической системой до тех пор, пока механическая система не достигнет предельного стопора. Это может привести к тому, что нежелательно высокие нагрузки будут воздействовать на позвоночник пользователя. Однако способ согласно настоящему изобретению основан на противоположном принципе: изначально поглощение энергии отсутствует и позвоночник пользователя, рассматриваемого в качестве перевозимого объекта, подвергают предварительному напряжению, после чего поглотитель энергии осуществляет поглощение энергии, так как демпфирование уменьшают по сравнению с изначально высоким значением демпфирования.
Кроме того, способ согласно настоящему изобретению обеспечивает оптимальное использование возможного рабочего хода во время событий избыточной нагрузки, характеризующихся чрезвычайной мощностью. После того как к задействованным механическим компонентам приложено предварительное напряжение, рабочий ход все еще полностью доступен. К задействованным механическим компонентам относится, например, механически деформируемая подвеска устройства для сидения. Указанное устройство для сидения обычно оснащено подушкой, формирующей поверхность для сидения, и/или подпружиненной поверхностью для сидения с тем, чтобы повысить комфорт, в частности, во время обычного использования. Кроме того, позвоночник человека, сидящего на указанной поверхности, также может рассматриваться в качестве указанного механического компонента. Устройство управления осуществляет управление или регулирование только после того, как задействованные механические компоненты подвергнуться предварительному напряжению.
Согласно настоящему изобретению демпфирование во всех случаях устанавливают равным высокому значению, которое ближе к максимальному значению, чем к минимальному значению, при обнаружении события избыточной нагрузки. Под максимальным значением демпфирования следует понимать значение, при котором (почти полностью) отсутствует относительное перемещение частей поглотителя энергии, которые выполнены с возможностью перемещения относительно друг друга для поглощения энергии. Начиная с этого значения, любое увеличение мощности не представляется целесообразным. Однако уменьшение мощности будет вызывать относительное перемещение частей поглотитель энергии, подвижных относительно друг друга для поглощения энергии. Предпочтительно высокое значение регулируют таким образом, чтобы отсутствовало относительное перемещение частей поглотителя энергии, подвижных относительно друг друга для поглощения энергии.
Согласно всем вариантам осуществления грузовой блок сформирован, в частности, в качестве устройства для сидения, предназначенного для перевозки людей в качестве объектов. Однако возможна также перевозка полезных грузов, животных или чувствительных к повреждениям устройств или других предметов. Согласно одному варианту осуществления, когда грузовой блок рассматривается в качестве устройства для сидения, приемный блок соответствует поверхности для сидения и устройство для сидения прикреплено к транспортному средству при помощи несущего устройства. Предпочтительно, грузовой блок прикреплен к транспортному средству и располагается максимально близко к его верхней части. Грузовой блок может быть прикреплен к крыше транспортного средства или к верхней части его боковой стенки.
Под повреждением объекта в контексте настоящего документа следует понимать состояние, в котором объект, по меньшей мере, временно изменился, причем такое изменение считается нежелательным или невыгодным. Такое повреждение может быть временным повреждением. Кроме того, повреждения могут быть стойкими или даже необратимыми.
Если перевозимые объекты являются людьми, под повреждением следует понимать вред, нанесенный здоровью человека. Под стойким повреждением в контексте человека следует понимать, по меньшей мере, продолжительное и серьезное ухудшение самочувствия. Повреждение, нанесенное объекту или устройству, может быть временным, при этом, в частности, оно может быть стойким и даже представлять собой необратимый дефект, такой как физическое разрушение компонента.
Предпочтительно, устройство управления периодически выводит характеристические параметры нагрузок, действующих на грузовой блок или устройство для сидения, на основании измеренных значений. Кроме того, возможно и предпочтительно, чтобы блок управления периодически выводил характеристические параметры нагрузок, действующих на объект и, в частности, позвоночник пользователя, на основе измеренных значений. Это включает, в частности, определение характеристических параметров на основании измеренных значений, которые, по меньшей мере, частично отражают ускорение грузового блока. Например, могут быть предусмотрены измеряющие перемещение датчики, которые обнаруживают относительное положение в течение коротких интервалов и выдают текущее ускорение на основании известного интервала между двумя измерениями. Кроме того, возможно использовать сочетание датчиков перемещения и/или усилия, и/или ускорения или каждый из указанных датчиков отдельно.
В простых случаях грузовой блок оснащен по меньшей мере одним срезным устройством, разрушение которого происходит, когда нагрузка, прикладываемая к грузовому блоку, превышает определенное значение. Преимущество указанного срезного устройства заключается в том, что вертикальный ход, обеспечиваемый поглотителем энергии, полностью сохраняется перед началом события избыточной нагрузки. В результате этого вертикальный ход полностью доступен во время события избыточной нагрузки, так что даже значительные нагрузки могут быть демпфированы, а их энергия поглощена.
Согласно предпочтительным вариантам осуществления блок управления распознает событие избыточной нагрузки, когда датчик срезывания обнаруживает срезывание (разрушение) срезного устройства. Указанный вариант осуществления является очень простым в исполнении, так как разрушение срезного устройство, такого как срезной штифт, может быть использовано в качестве исходной точки предлагаемого способа. Например, измерительное устройство лишь периодически регистрирует измеренные значения, когда датчик срезывания обнаруживает разрушение срезного устройства. Это может быть реализовано, например, при помощи срезного штифта, обеспечивающего токопроводящее соединение, прерывание которого инициирует исходный сигнал для периодической регистрации измеренных значений.
Предпочтительно, чтобы блок управления обнаруживал событие избыточной нагрузки в случае, если характеристический параметр превышает определенное значение. Этот вариант осуществления работает с использованием срезного устройства, так и без него. Блок управления согласно этому варианту осуществления может постоянно регистрировать измеренные значения, поступающие от измерительного устройства, а также обнаруживать событие избыточной нагрузки при помощи значения полученных характеристических параметров. Если измеренное или обнаруженное ускорение устройства для сидения превышает определенное значение, то обнаруживают событие избыточной нагрузки.
Демпфирование, которое устанавливают равным высокому значению перед или непосредственно после обнаружения события избыточной нагрузки, предпочтительно поддерживают в течение определенного периода времени после обнаружения события избыточной нагрузки.
Согласно предпочтительным вариантам осуществления демпфирование снижают до более низкого уровня и/или нуля по прошествии определенного периода времени, а затем адаптируют в зависимости от характеристического параметра или снова повышают. Это позволяет осуществить гибкое и оптимальное управление нагрузкой на человека, сидящего на устройстве для сидения, или на объект, расположенный на поверхности грузового блока. В случае повреждения, демпфирование регулируют таким образом, чтобы оно было достаточно жестким для прикладывания предварительного напряжения к ранее ненагруженному позвоночнику. Только после этого демпфирование снижают по прошествии определенного периода времени таким образом, чтобы было возможно относительное перемещение компонентов поглотителя энергии. Затем демпфирование поглотителя энергии снижают и/или повышают в соответствии с характеристическим параметром, используя постоянно регистрируемые измеренные значения. Это позволяет, в результате определенного хода поршня поглотителя энергии, предотвратить воздействие на объект или пользователя нежелательных усилий или нагрузок.
Согласно всем вариантам осуществления предпочтительно, чтобы поглотитель энергии изначально подвергался максимальному демпфированию для сохранения максимального вертикального хода, если это возможно.
Согласно предпочтительному варианту возможно, чтобы, после обнаружения события избыточной нагрузки или по прошествии определенного периода времени, управление работой поглотителя энергии осуществляли динамически на основании соответствующего характеристического параметра, который был выведен последним. Это обеспечивает оптимальное протекание события избыточной нагрузки.
Согласно предпочтительному варианту возможно, чтобы демпфирование поглотителя энергии снижалось, если характеристический параметр достигает или выходит за границы определенной предельной нагрузки для объектов, людей или устройств.
Согласно специальным вариантам осуществления допустимую предельную нагрузку устанавливают исходя из возможностей среднестатистического человека. Кроме того, предпочтительно, чтобы допустимую предельную нагрузку индивидуально регулировали исходя из характеристик объектов или возможностей пользователей.
Кроме того, возможно, в частности, принять во внимание данные, поступающие от блока датчиков, расположенного на человеке или объекте. В этом случае может быть предусмотрено наличие нескольких блоков датчиков с тем, чтобы улучшить надежность измеренных значений и учесть большее число параметров.
Согласно всем вариантам осуществления грузовой блок или устройство для сидения предпочтительно соединены по меньшей мере с одним измерительным приспособлением, чтобы, например, могло быть осуществлено определение массы перевозимого объекта или человек и/или ускорения устройства для сидения. Измерительное приспособление, в частности, является частью измерительного устройства. Кроме того, можно использовать плоское измерительное приспособление, расположенное на поверхности для сидения грузового блока или устройства для сидения, которое измеряет несколько значений, распределенных по поверхности. Во всех случаях предпочтительно использовать поглотитель энергии с магнитореологическим клапаном поглотителя, при этом уровнем демпфирования магнитореологического клапана поглотителя управляют в соответствии с интенсивностью магнитного поля, прикладываемого к клапану поглотителя.
Узел согласно настоящему изобретению содержит грузовой блок для перевозки объектов и по меньшей мере один поглотитель энергии, предназначенный для поглощения энергии во время события избыточной нагрузки, чтобы снизить нагрузки на объекты, перевозимые в грузовом блоке. Поглотитель энергии подходит и скомпонован для поглощения энергии во время одиночного события избыточной нагрузки, которое характеризуется настолько высоким количеством энергии, что без поглотителя энергии существует вероятность или высокая вероятность, или очень высокая вероятность, или 100% вероятность того, что нагрузка превысит пороговое значение и, в частности, перевозимый объект получит повреждения, чтобы посредством выполняемого им поглощения снизить результирующую нагрузку на объекты и предотвратить их повреждение во время или в ходе события избыточной нагрузки. При этом предусмотрены устройство управления и по меньшей мере одно измерительное устройство для регистрации измеренных значений, относящихся к текущему состоянию грузового блока. Предусмотрен по меньшей мере один поглотитель энергии. Поглотитель энергии может управляться устройством управления в соответствии с измеренными значениями. Устройство управления сформировано и сконфигурировано таким образом, чтобы обнаруживать события избыточной нагрузки на основании зарегистрированных измеренных значений, а также, по меньшей мере, непосредственно после обнаружения события избыточной нагрузки, устанавливать демпфирование поглотителя энергии равным довольно высокому значению и, в частности, высокому значению, которое ближе к максимально настраиваемому значению демпфирования, чем к минимально настраиваемому значению, и, по меньшей мере, приблизительного или грубого поддерживать демпфирование в течение определенного периода времени. Указанный определенный период времени рассчитывают таким образом, чтобы в течение этого определенного периода времени зарегистрировать множество последовательных измеренных значений. По прошествии определенного периода времени демпфированием управляют или могут управлять в зависимости от измеренных значений, зарегистрированных во время события избыточной нагрузки, чтобы вначале повысить нагрузку на объекты, перевозимые в грузовом блоке, до определенной предельной нагрузки в течение определенного периода времени, а затем по прошествии определенного периода времени управлять указанной нагрузкой в зависимости от измеренных значений, зарегистрированных во время события избыточной нагрузки.
Узлу согласно настоящему изобретению также присущи многочисленные преимущества, так как он включает индивидуальное управление поглотителем энергии во время события избыточной нагрузки. Измерительное устройство предпочтительно расположено в недемпфированной части узла.
Предпочтительно, предусмотрен по меньшей мере один блок датчиков, который может быть расположен на объекте и, в частности, на человеке, рассматриваемом в качестве объекта, который может быть подключен к устройству управления при помощи проводов или беспроводной связи. Кроме того, предпочтительно предусмотрено по меньшей мере одно измерительное приспособление, которое соединено с грузовым блоком, чтобы измерять массу перевозимого объекта и/или ускорение грузового блока, и/или прикладываемое усилие.
Поглотитель энергии предпочтительно оснащен по меньшей мере одним магнитореологическим клапаном поглотителя, демпфированием которого управляют в соответствии с интенсивностью магнитного поля, действующего на клапан поглотителя.
Во всех случаях грузовой блок может быть оснащен срезным устройством, которое может срезаться (разрушиться), когда нагрузка на грузовой блок превышает определенное значение.
Во всех случаях способ управления может быть программируемым. Способ может быть адаптирован к различным каркасам или каркасам сидений. Управление может быть оптимизировано в соответствии со сценарием угрозы или возможностью возникновения опасности. Кроме того, возможны различные адаптации к расположению узла, например, когда возможный вертикальный ход штока изменен или компоненты подверглись различным изменениям или модификациям.
Согласно всем вариантам осуществления демпфированием предпочтительно управляют путем пропускания электрического тока через электропроводящую катушку, предназначенную для генерирования магнитного поля. Это включает в себя начальное генерирование очень большого усилия, что вызывает прикладывание предварительного напряжения к позвоночнику человека, рассматриваемого в качестве объекта, а также к любым подушкам сиденья и/или пружинам и подобным элементам. В результате этого имеет место предпочтительно короткий рабочий ход до тех пор, пока ко всей системе не будет приложено предварительное напряжение, а на позвоночник не будут воздействовать конкретные и определенные усилия. После этого усилие резко снижают, в частности, перед достижением максимально допустимого для позвоночника усилия. Указанное резкое снижение усилия предпочтительно обеспечивают за счет отключения подаваемого электрического тока. В результате резкого снижения усилия будет предотвращено чрезмерное повышение воздействующего на позвоночник усилия или нагрузки. Затем нагрузку или действующее на позвоночник усилие предпочтительно поддерживают до тех пор, пока не подойдет к концу первый этап разрушительного воздействия события избыточной нагрузки. Это надежным образом не дает системе достигнуть нижнего придела в большинстве возможных случаев.
Согласно всем вариантам осуществления возможно, чтобы была реализована дополнительная функция повышения комфорта, при этом часть вертикального хода или рабочего хода поглотителей энергии используют для гашения и демпфирования небольших толчков или ударов и повышения комфорта. Для этого может быть использовано центральное управление, при этом специально отведенная часть всего хода штока доступна для обеспечения функции повышения комфорта. Таким образом, весь рабочий ход доступен в случае событий избыточной нагрузки, если существует высокая вероятность возникновения опасной ситуации, тогда как в безопасных ситуациях большая часть рабочего хода доступна для демпфирования ударов и толчков в целях повышения комфорта.
Кроме того, существует возможность регулировки высоты сиденья в варианте осуществления узла в качестве устройства для сидения. Это может повысить безопасность при перевозке людей с ростом и массой ниже стандартных, так как доступен более продолжительный рабочий ход.
Согласно всем вариантам осуществления, в случае если люди рассматриваются в качестве объектов, регулировку предпочтительно осуществляют в соответствии с измеренным и оцененным действующим на позвоночник усилием. Усилие, прикладываемое к позвоночнику, не должно превышать 4000 Н.
Согласно дополнительным вариантам осуществления демпфируют два последовательных и связанных между собой этапа разрушительного воздействия события избыточной нагрузки. Например, первый этап разрушительного воздействия представляет собой непосредственное воздействие, т.е. первоначальный отрыв от земной поверхности бронированного транспортного средства в результате взрыва. Этому воздействию противодействуют соответствующим демпфированием. После этого транспортное средство ударяется о земную поверхность. Это является вторым этапом разрушительного воздействия события избыточной нагрузки, который также демпфируют соответствующим образом. Следовательно, предпочтительно включают автоматический возврат поглотителя энергии в его исходное положение.
Во всех случаях грузовой блок, в частности, сконфигурирован в качестве устройства для сидения транспортного средства или механизированного транспортного средства. Устройство для сидения содержит приемный блок, сконфигурированный в качестве сиденья, и несущее устройство, сконфигурированное в качестве каркаса сиденья. Поглотитель энергии установлен между сиденьем и каркасом сиденья.
В контексте настоящего изобретения под одиночным событием избыточной нагрузки предпочтительно подразумевают взрыв мины. В частности, другими одиночными событиями избыточной нагрузки, характеризующимися выделением энергии, в контексте настоящего изобретения могут считаться события, при которых сила импульса и продолжительность импульса не могут быть оценены, в частности, на основании предшествующих измеренных значений. Такое одиночное событие избыточной нагрузки возникает, например, во время дорожно-транспортного происшествия, сопровождающегося выездом за пределы дороги, например, когда водитель потерял управление, и транспортное средство неожиданно и непрогнозируемо свалилось в откос или т.п. При возникновении таких происшествий величина энергии, воздействующей на транспортное средство во время события избыточной нагрузки, не может быть вычислена из скорости транспортного средства, при этом она зависит от высоты, с которой упало транспортное средство, которая также не может быть вычислена, например, из скорости транспортного средства.
Следовательно, настоящее изобретение может предоставить защиту пассажирам, находящимся в механизированных транспортных средствах, или снизить действующие на них нагрузки во время так называемых происшествий, сопровождающихся выездом за пределы дороги, которые, например, в США являются причиной 50% смертельных случаев во время дорожно-транспортных происшествий.
Выезд дорожных транспортных средств, таких как легковые автомобили, внедорожники, грузовые автомобили и т.п., за пределы дорог с твердым покрытием по причине рассеянности, усталости и плохих погодных условий происходит очень часто. Транспортные средства, оснащенные узлом согласно настоящему изобретению, предпочтительно оборудованы конструкцией для сидения, которая содержит сиденье и каркас сиденья, при этом описанный выше поглотитель энергии поглощает большую часть энергии удара, которая, в частности, характеризуется вертикальным или по существу вертикальным действием. Для того чтобы уберечь пассажиров от опасных повреждений позвоночника, между сиденьем и каркасом сиденья предусмотрен по меньшей мере один поглотитель энергии, предназначенный для демпфирования вертикальных усилий, и/или усилий, направленных параллельно спинке сиденья, и/или усилий, направленных перпендикулярно поверхности для сидения. Эти усилия возникают при сильном (по меньшей мере, частично вертикальном) ударе транспортного средства за пределами дороги. Во время таких событий избыточной нагрузки энергия удара, которая должна быть поглощена, действует в основном или по существу, или почти полностью в вертикальном направлении.
Настоящее изобретение в целом не предназначено для поглощения энергии при лобовых столкновениях. Для поглощения энергии при лобовых столкновениях на стандартных дорогах транспортные средства оснащены деформируемыми зонами или подушками безопасности.
Величина нагрузок, действующих в вертикальном направлении, во время событий избыточной нагрузки и дорожно-транспортных происшествий, сопровождающихся выездом за пределы дороги, или величина вертикальных нагрузок во время взрывов мин не могут быть вычислены из параметров, предшествующих событию избыточной нагрузки, так как они не могут быть оценены или измерены.
Во всех случаях поглотитель энергии может быть установлен вертикально, горизонтально или в положении, которое отличается от вертикального или горизонтального.
Как известно из уровня техники, датчик, установленный на механизированных транспортных средствах, обнаруживает, вышло ли транспортное средство за пределы дороги, и активирует соответствующие системы безопасности, такие как устройства для натяжения ремня безопасности. Однако это не позволяет рассчитать тяжесть происшествий, а также необходимое оптимальное снижение нагрузки. Важным является то, что происходит с транспортным средством после того, как оно съехало с дороги, где и как оно приземлиться или с каким типом земной поверхности оно столкнется, а также какую пространственную ориентацию оно будет иметь во время удара. Способ согласно настоящему изобретению способен обеспечить ответное действие, которое релевантно удару/импульсу, как описано ранее и далее в настоящем документе, что приводит к более оптимальному демпфированию и снижает травмы по сравнению с известными из уровня техники решениями.
Дальнейшие преимущества и признаки настоящего изобретения могут быть взяты из описания иллюстративных вариантов осуществления, которые будут рассмотрены ниже со ссылками на прилагаемые фигуры, где
на фиг. 1 представлен схематический вид в перспективе предлагаемого узла;
на фиг. 2 представлен вид спереди узла, изображенного на фиг. 1;
на фиг. 3 представлен вид сбоку в разрезе узла, изображенного на фиг. 1, в состоянии демпфирования;
на фиг. 4 представлен вид спереди в разрезе узла, изображенного на фиг. 1, в состоянии покоя;
на фиг. 5 представлено транспортное средство с предлагаемыми узлами для защиты пассажиров от взрывов;
на фиг. 6 представлена характеристика изменения во времени демпфирующего усилия узла, изображенного на фиг. 1, во время события избыточной нагрузки; и
на фиг. 7 представлена блок-схема управления узлом во время события избыточной нагрузки согласно фиг. 6.
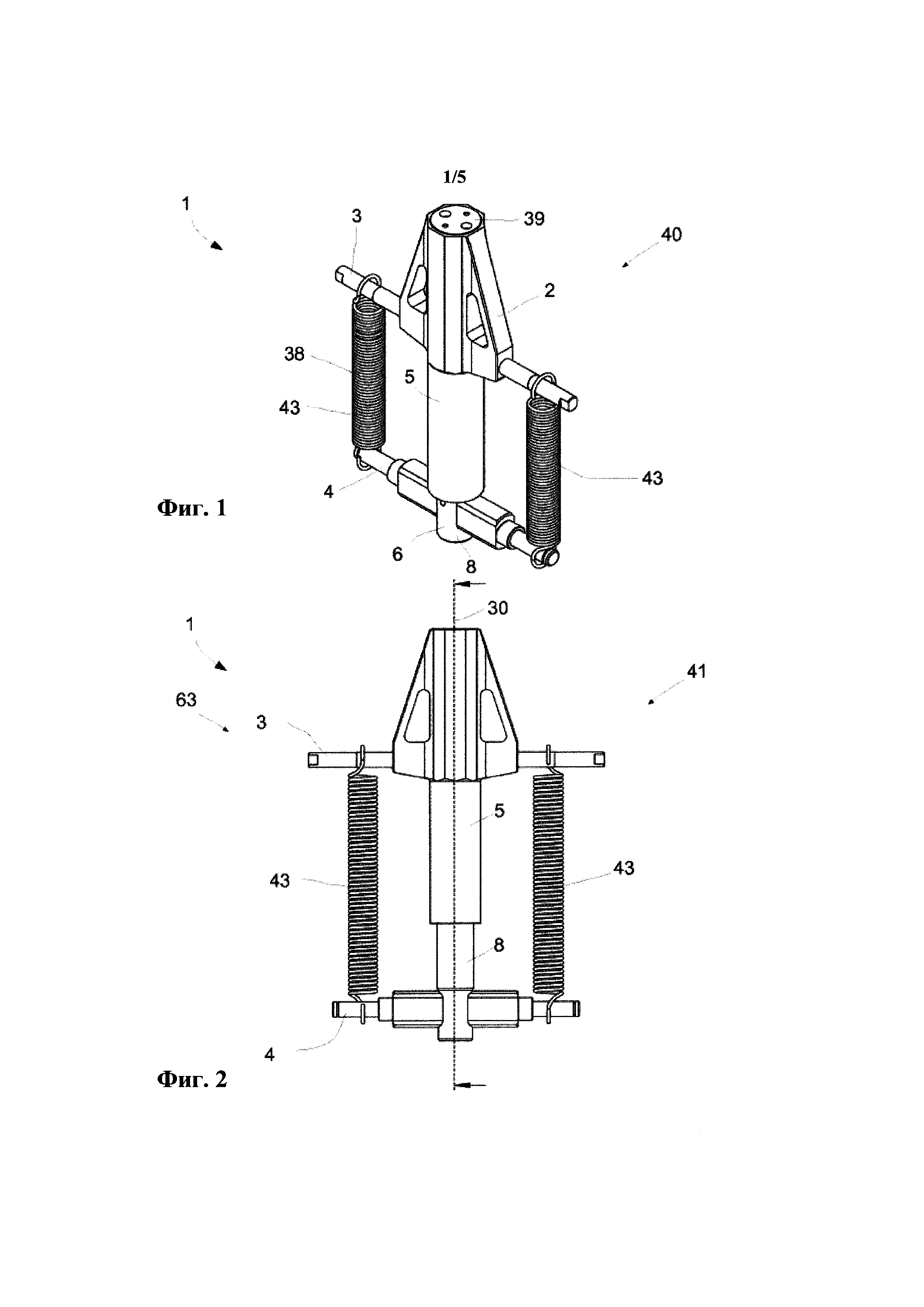
На фиг. 1 представлен схематический вид в перспективе предлагаемого узла 1. Узел содержит цилиндр 5 поглотителя, на одном конце которого установлено крепежное приспособление 3, а на другом конце - фиксирующее устройство 4. Каждое из фиксирующего устройства 4 и крепежного приспособления 3 содержит два выступающих в сторону плеча, между которыми установлена одна пружина 43 для предварительного напряжения каждого из устройств 38 для предварительного напряжения, которые предназначены для перемещения узла 1 обратно в состояние покоя 40 после события 63 избыточной нагрузки, которое также показано на фиг. 1.
Узел 1 служит для поглощения энергии или демпфирования относительных перемещений между крепежным приспособлением 3 и фиксирующим устройством 4. Для этого фиксирующее устройство 4 соединено с поршневым устройством 6 поглотителя энергии 2, при этом крепежное приспособление 3 жестко соединено с цилиндром 5 поглотителя. В верхнем конце узла расположена концевая крышка 39, которая закрывает и ограничивает вторую камеру, входящую в состав камеры 9 поглотителя, которая находится во внутреннем пространстве. Узел 1, в частности, встроен в грузовой блок 100 между приемным блоком 101 и несущим устройством 102 (см. фиг. 5).
На фиг. 2 представлен вид спереди узла 1. Ось 30 симметрии, через которую проходит сечение, изображенное на фиг.3, проходит через центр цилиндра 5 поглотителя и вдоль него.
На фиг. 3 представлено сечение, изображенное на фиг. 2, при этом узел находится в состоянии покоя 40. Кроме того, устройство 21 для сидения схематически представлено в качестве грузового блока 100. Грузовой блок 100 характеризуется наличием приемного блока 101 или поверхности 21а для сидения, на которой может сидеть объект 103, такой как человек 105, например, например, солдат, перевозимый транспортером для личного состава.
Во внутреннем пространстве цилиндра 5 поглотителя можно распознать сечение поршня 7 поглотителя, соединенного со штоком 8 поршня поршневого устройства 6. Поршень 7 поглотителя разделяет камеру 9 поглотителя во внутреннем пространстве цилиндра 5 поглотителя на первую камеру 10 и вторую камеру 11. Вторая камера 11 ограничена снаружи концевой крышкой 39 и, в этом случае, герметично уплотнена.
В состоянии покоя первая камера 10, по меньшей мере, частично и, в частности, полностью заполнена жидкостью 12 поглотителя. При возникновении события 63 избыточной нагрузки шток 8 поршня выходит из цилиндра 5 поглотителя, в результате чего жидкость 12 поглотителя в первой камере 10 проходит через канал 14 поглотителя, выполненный в поршне 7 поглотителя, и попадает во вторую камеру 11. В состоянии покоя вторая камера 11 может быть частично заполнена жидкостью 12 поглотителя. Альтернативно, в состоянии покоя вторая камера 11 может быть лишь незначительно заполнена жидкостью 12 поглотителя или быть заполнена только воздухом или другим сжимаемым газом или средой.
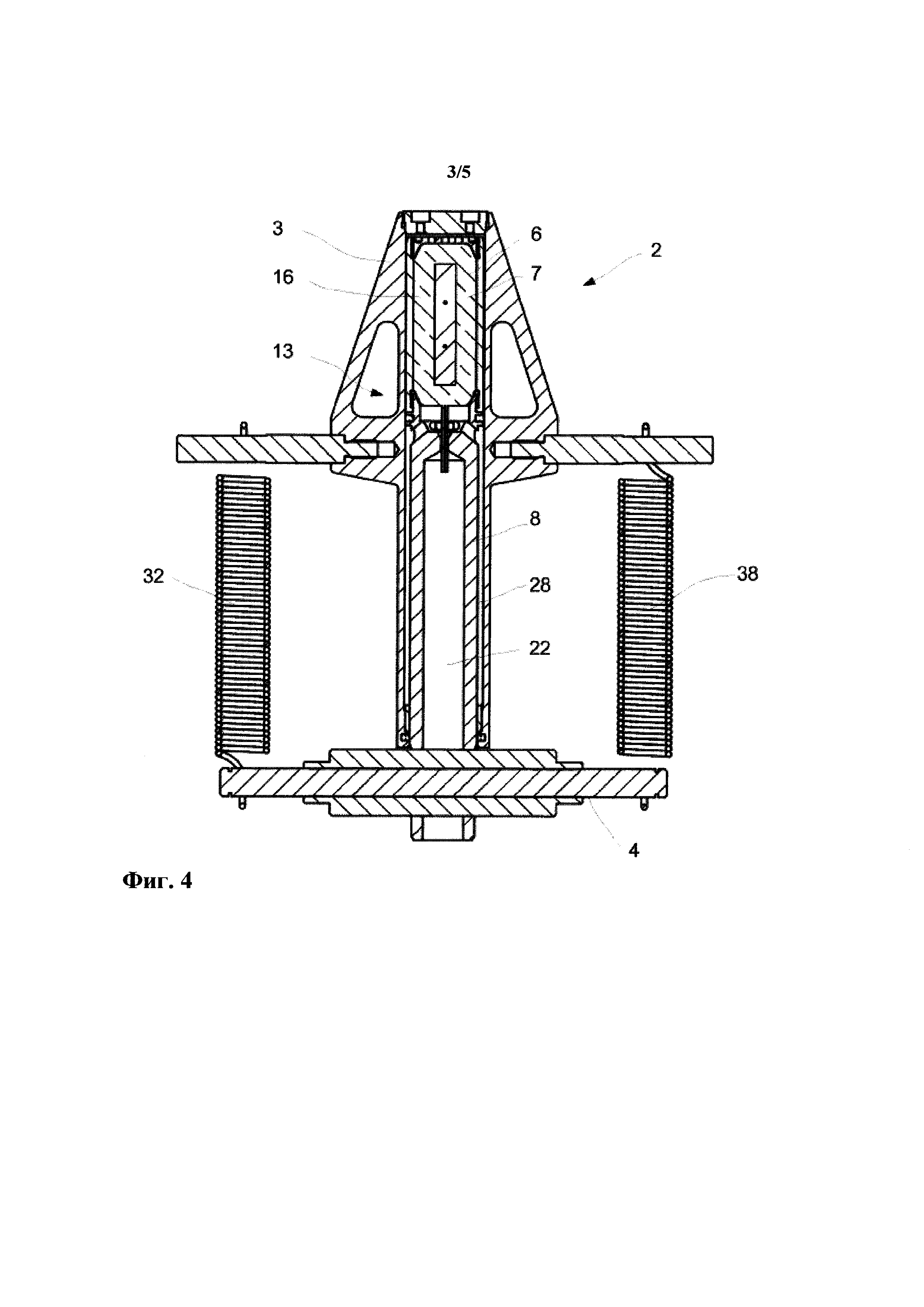
На фигуре отчетливо видно, что шток 8 поршня характеризуется очень большим диаметром, так что лишь сравнительно узкий кольцевой зазор вокруг штока поршня остается для первой камеры 10. Благодаря этому перемещение поршня 7 поглотителя вызывает вытеснение относительно небольшого объема жидкости 12 поглотителя из первой камеры 10. Следовательно, значения расхода жидкости 12 поглотителя в канале 14 поглотителя остаются низкими даже в случае возникновения событий 63 избыточной нагрузки, вызванных взрывами, так что длина поршня 7 поглотителя является достаточной для оказания необходимого воздействия на поток при помощи магнитного поля электропроводящей катушки, действующей в качестве генерирующего поле устройства 16.
При создании потока жидкости 12 из первой камеры 10 во вторую камеру 11, указанная жидкость перемещается в направлении вовнутрь узла через радиальные проточные отверстия 44, которые проходят радиально под углом от наружной поверхности во внутреннее пространство. Из этого следует, что проточный канал или канал 14 поглотителя смещен ближе к центру цилиндра в радиальном направлении, чем первая камера 10. Это позволяет эффективно использовать внутреннее пространство поршня 7 поглотителя для генерирования необходимого магнитного поля, а также для размещения канала 14 поглотителя.
В этом случае шток 8 поршня выполнен значительно более толстым, чем необходимо исходя из требований устойчивости. Следовательно, шток 8 поршня характеризуется наличием свободного пространства 22, которое сконфигурировано в качестве глухого отверстия. Глухое отверстие 22 проходит от конца 26, противоположного поршню, в шток 8 поршня. Свободное пространство 22 может проходить лишь до начала поршня 7 поглотителя, в результате чего свободное пространство 22 проходит вдоль трех четвертей или более длины штока 8 поршня до поршня 7 поглотителя. Свободное пространство 22 может быть использовано исходя из его размеров. Устройство 48 управления и аккумулятор 47 энергии расположены в свободном пространстве 22. Устройство 48 управления соединено с электропроводящей катушкой 16 для того, чтобы управлять ее работой. Более того, устройство 48 управления соединено с измерительным устройством 61 для того, чтобы получать и обрабатывать нагрузку, действующую на грузовой блок 100, выполненный в качестве устройства 21 для сидения.
Аккумулятор 47 энергии обеспечивает то, что, даже в случае отказа системы питания, установленной на бору транспортного средства, узел 1 будет всегда выдавать необходимое количество энергии для управления поглотителем 2 энергии. Аккумулятор энергии может представлять собой конденсатор или аккумуляторную батарею.
В этом случае поршень 7 поглотителя не только отделяет первую камеру 10 от второй камеры 11, но также образует клапан 13 управления потоком, который может управляться устройством 48 управления.
На фиг. 4 представлено другое поперечное сечение узла 1, при этом устройство 38 для предварительного напряжения изображено в разрезе в качестве возвращающего устройства 32/43. Для ясности на фигуре не показаны аккумулятор 47 энергии и устройство 48 управления, расположенные в свободном пространстве 22. Первая камера 10 образует кольцевую камеру 28 вокруг штока 8 поршня. Радиальная протяженность кольцевой камеры 28 меньше толщины стенки полого штока 8 поршня.
На фиг. 5 представлено схематическое изображение транспортного средства 50, такого как транспортер для личного состава, которое оснащено узлами 1 в соответствии с настоящим изобретением для защиты пассажиров в случае взрывов. Транспортное средство 50 характеризуется наличием корпуса 51, к которому присоединены сиденья 60 с противоминной защитой в качестве узлов 1. Транспортное средство 50 может перемещаться при помощи колес с шинами 52. Во время события 63 избыточной нагрузки, такого как взрыв, транспортное средство 50 будет подброшено вверх, при этом грузовые блоки 100 узлов 1, которые идентифицированы в качестве устройств 21 для сидения, подвергнуться демпфированному перемещению для того, чтобы предотвратить поражение сидящих на них людей.
На фиг. 6 представлена характеристика 70 изменения во времени относительно отрегулированного электрического тока поглотителя 2 энергии во время события 63 избыточной нагрузки. Указанное событие избыточной нагрузки происходит, например, при детонации наземной мины во время наезда на нее бронированного транспортера для перевозки личного состава.
Событие 63 избыточной нагрузки обнаруживают, например, при разрушении срезного штифта срезного устройства 42, так как прикладываемая к нему нагрузка превышает срезающее усилие. Это приводит к прерыванию токопроводящего контакта срезным устройством 42, что обнаруживается устройством 48 управления. После чего запускают соответствующую последовательность управляющих команд. Этот момент времени обозначают t0.
Альтернативно или дополнительно, устройство 48 управления может также запускать альтернативный алгоритм для обнаружения события избыточной нагрузки. Устройство 48 управления может также запросить и оценить соответствующие измеренные значения в определенных интервалах из измерительного устройства 61, блока 68 датчиков и дополнительных измерительных приспособлений, для периодического выведения параметра 65 из одиночного измеренного значения от одного датчика или множества измеренных значений от различных датчиков. Определение параметра 65, например, может происходить каждые 10 мс или с другими подходящими интервалами. После того как событие 63 избыточной нагрузки обнаружено, предпочтительно выбрать более короткий интервал.
В момент времени t0 сильный электрический ток прикладывают непосредственно к электропроводящей катушке 16. В частности, максимально возможный ток моментально прикладывают к электропроводящей катушке 16 с тем, чтобы немедленно заблокировать поглотитель 2 энергии. Магнитное поле, генерируемое электропроводящей катушкой 16, вызывает сцепление магнитореологических частиц в магнитореологической жидкости 12 поглотителя внутри канала 14 поглотителя. Для осуществления нагнетания жидкости 12 поглотителя через канал 14 поглотителя прикладываемое усилие должно быть достаточно высоким, чтобы осуществить (обратимый) сдвиг магнитореологических частиц. Следовательно, максимальное усилие регулируют таким образом, чтобы во время события избыточной нагрузки оно, как правило, было достаточным для предотвращения относительного перемещения фиксирующего устройства 4 и крепежного приспособления 3. Электрическое напряжение остается равным 100% в течение заданного периода 67 времени. Продолжительность периода 67 может быть предварительно задана, при этом она может варьировать в зависимости от, например, массы человека 105, сидящего на устройстве 21 для сидения. Кроме того, масса предмета 104, рассматриваемого в качестве объекта 103, может быть зарегистрирована и учтена во время регулировки. Кроме того, прикладываемые усилия могут быть определены для обнаруженного ускорения. Во многих случаях допустимое максимальное усилие может не быть превышено. Усилие рассчитывают в качестве произведения ускорения и массы.
Заданный период 67 предпочтительно выбирают на основании измерений, расчетов и эмпирических данных таким образом, чтобы, во время чрезвычайной ситуации 63, в пределах периода 67 отсутствовало превышение допустимой нагрузки на спину или позвоночник среднестатистического человека. При этом ненагруженный позвоночник человека 105, сидящего на устройстве 21 для сидения, во время события 63 избыточной нагрузки будет подвергнут воздействию предварительного напряжения. Аналогично, различные пружины и подушки устройства 21 для сидения, а также механические компоненты, действующие в качестве пружин, также будут подвержены предварительному напряжению. В случае перевозки предметов 104, их характеристики будут соответствующим образом приняты во внимание, чтобы обеспечить защиту при перевозке чувствительных к повреждению устройств.
Когда период 67 времени подойдет к концу, нагрузка на человека в момент времени t1 может достигнуть максимально заданной нагрузки 81. Наряду с этим также будет достигнута предельная нагрузка 64, которая не должна быть превышена. Для того чтобы обеспечить выполнение оптимального управления, электрический ток, прикладываемый к электропроводящей катушке 16, резко уменьшают до величины 72. В частности, электрический ток, прикладываемый к электропроводящей катушке 16, резко снижают до нуля. Это препятствует чрезмерному повышению характеристики 80 изменения нагрузки.
В начале наблюдается быстрой рост характеристики 80 изменения нагрузки, после чего она достигает плато 82. Теперь поглотитель 2 энергии допускает относительное перемещение устройства 21 для сидения относительно корпуса 51 транспортного средства 50. В момент времени t2 электрический ток снова повышают до величины 78, и начиная с этого момента ток электропроводящей катушки 16 начинают изменять путем быстрого линейного повышения. При этом происходит соответствующее увеличение демпфирования, в результате чего имеет место снижение скорости перемещения поршня 7 поглотителя и поддержание нагрузки на уровне плато 82. Таким образом, нагрузку постоянно поддерживают на максимально приемлемом уровне. Благодаря этому всегда доступны максимально возможные резервы с тем, чтобы демпфировать событие избыточной нагрузки без нанесения серьезного повреждения человеку, сидящему на сиденье с противоминной защитой. Если поглотитель энергии или демпфер достигнет упора, то произойдет резкий рост нагрузки, при этом она может продолжить возрастать, выходя за границы допустимых предельных значений. Настоящее изобретение значительно снижает риски повреждения. В момент времени t3 событие избыточной нагрузки подошло к концу и подачу тока снова отключили.
На протяжении временного интервала, начинающегося в момент времени t1, осуществляют регулируемое управление демпфированием. Для этого периодически получают измеренные значения, поступающие от датчиков 61 и 68. На основе результатов измерения периодически получают параметр 65, который используют для осуществления последующего управления. Текущую нагрузку выводят из параметра 65, если указанный параметр непосредственно не отражает значение текущей нагрузки. На основе текущей нагрузки осуществляют управление электрическим током таким образом, чтобы нагрузка предпочтительно находилась немного ниже предельной нагрузки 64 и не выходила за ее границы.
Если обнаружено, что максимум нагрузки события избыточной нагрузки был пройден, демпфирование могут отрегулировать таким образом, чтобы оно стало мягче для повышения комфорта.
На фиг. 6 также изображена штрихпунктирная линия 83, которая отражает другую характеристику изменения нагрузки. Путь линии 83 также начинается в момент времени t0, когда обнаруживают событие 63 избыточной нагрузки. И в этом случае, электрический ток повышают до 100% и в момент времени t1 снижают до нуля. В момент времени t2 электрический ток повышают до величины 78, после чего осуществляют быстрое линейное повышение (73) тока вплоть до момента времени t2a. После чего происходит снижение нагрузки, так что демпфированием может быть смягчено и электрический ток может быть уменьшен.
Согласно одному варианту осуществления текущее значение параметра 65 периодически определяют, начиная, по меньшей мере, с момента времени t0 и на протяжении определенного периода 67. Затем осуществляют постоянное управление с использованием соответствующего определенного параметра 65 до тех пор, пока, например, он упадет ниже порога 69 события избыточной нагрузки.
В случае отсутствия срезного устройства 42, порог 69 события избыточной нагрузки может также быть использован в качестве порогового значения для обнаружения события 63 избыточной нагрузки. В случае нагрузок, которые не превышают порога 69 события избыточной нагрузки, поглотитель энергии может служить для повышения комфорта, поглощая небольшие толчки. Определенная часть вертикального хода может быть зарезервирована для событий избыточной нагрузки. Зарезервированная часть может зависеть от текущего уровня опасности.
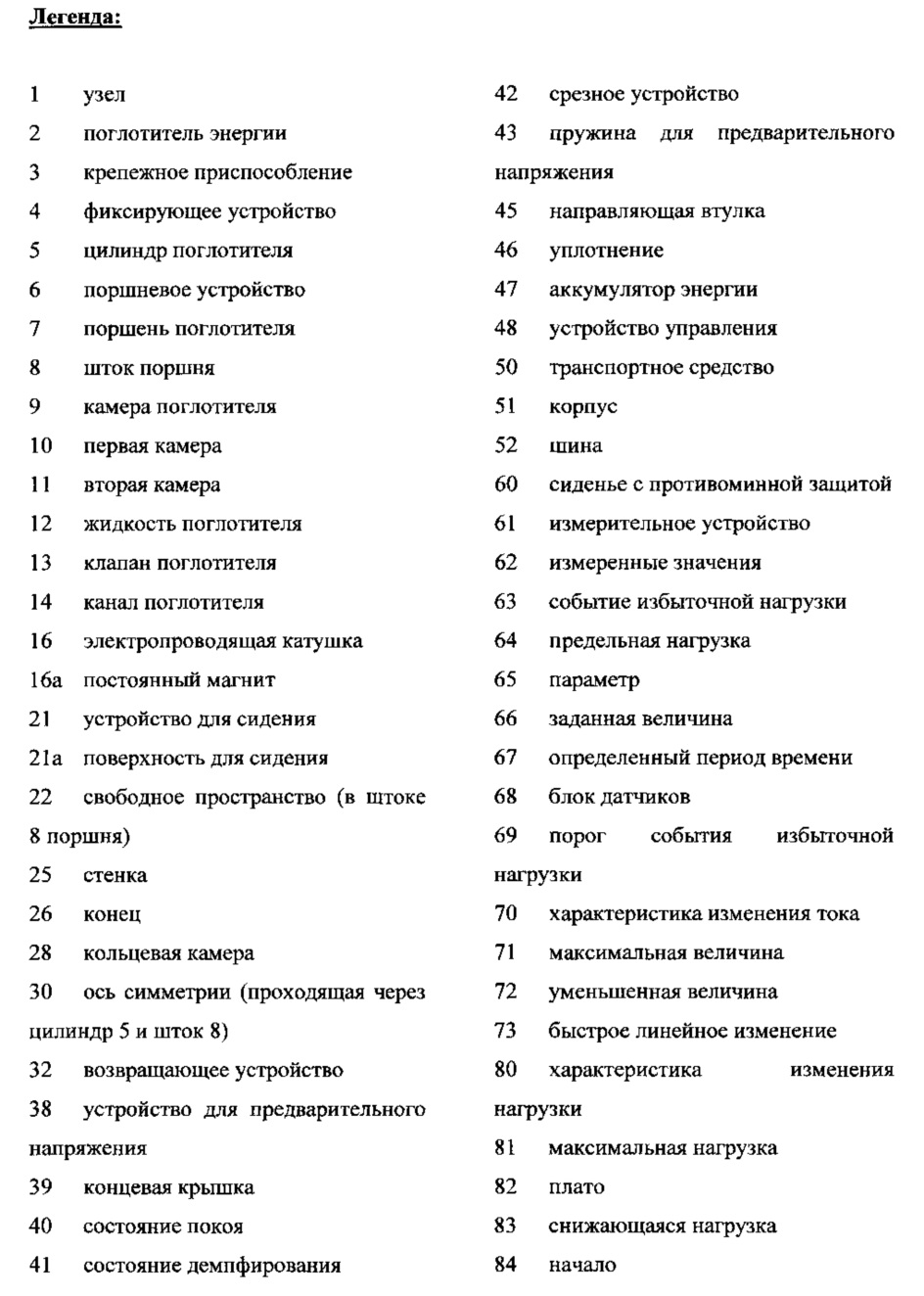
На фиг. 7 изображено схематическое представление процесса управления согласно определенному варианту осуществления. Процесс начинается на стадии 84. В этом случае, например, срезное устройство 42 опрашивают в ходе бесконечного цикла для того, чтобы обнаружить взрыв. Если в ходе стадии 85 произойдет обнаружение взрыва или подобного разрушения, бесконечный цикл прерывают в разветвлении 94, и происходит инициализация устройства 48 управления. Это осуществляют на стадии 86. На данном этапе также запускают алгоритм 87 управления, чтобы обеспечить максимально жесткое демпфирование 66 или 71 поглотителя энергии в ходе определенного периода 67 времени. Период 67 времени используют для создания предварительного напряжения во всех (механических) участвующих в процессе компонентах, включая объект 103. Начиная с момента времени t0 и, в частности, после завершения периода времени 103, характеристические параметры 65 периодически выводят из измеренных значений, полученных в ходе стадии 89 измерения, на стадии 90 определения параметров. Параметры 65, а также, в этом случае, сами измеренные значения направляют в алгоритм 88 регулировки. Алгоритм 88 регулировки направляет данные на стадию 91, на которой рассчитывают управляющую переменную. Для того чтобы рассчитать управляющую переменную и, в этом случае, значение тока, дополнительно используют данные, поступающие от алгоритма 87 управления, в который также поступают измеренные значения. Наконец, на стадии 92 запитывают исполнительный механизм. После этого блок-схема системы управления осуществляет повторный прогон и возвращается обратно на стадию 88. В это время получают текущие измеренные значения. Фактические значения сравнивают с желаемым значением, и на основании результатов осуществляют при необходимости повторную регулировку. Если на стадии 95 обнаруживают, что имело место завершение события избыточной нагрузки или взрыва, при помощи разветвления 95 инициируют конец 93 процесса управления. Конец 93 может быть непосредственно связан с началом 84 для обнаружения будущих разрушений.
Согласно всем вариантам осуществления объект, перевозимый в грузовом блоке, может быть непосредственно или опосредованно прикреплен и/или присоединен к грузовому блоку и/или расположен в грузовом блоке или на его поверхности. Соединение может быть постоянным или/или разъемным. Альтернативно, объект расположен на поверхности грузового блока и удерживается на месте под действием собственной массы.

Реферат
Группа изобретений относится к способу и демпфирующему узлу для поглощения энергии во время события избыточной нагрузки. Измеренные значения по текущему состоянию грузового блока регистрируют при помощи датчика. Работой поглотителя энергии управляют на основе зарегистрированных значений. Устройство управления обнаруживает событие (63) избыточной нагрузки на основе зарегистрированных измеренных значений. Демпфирование поглотителя энергии устанавливают на высоком уровне после обнаружения события (63) избыточной нагрузки и поддерживают в течение определенного продолжительного периода (67) времени. После этого демпфированием управляют в зависимости от измеренных значений, зарегистрированных в течение события избыточной нагрузки. Вначале увеличивают нагрузку на объекты, перевозимые в грузовом блоке, в течение определенного периода (67) времени до определенной предельной нагрузки (64). Затем управляют нагрузкой по прошествии определенного периода (67) времени в зависимости от измеренных значений, зарегистрированных в течение события избыточной нагрузки. Достигается снижение нагрузки на объект, перевозимый в грузовом блоке. 2 н. и 18 з.п. ф-лы, 7 ил.
Комментарии