Инерционный демпфер и способ уменьшения амплитуды колебаний - RU2719844C1
Код документа: RU2719844C1
Чертежи
Описание
Настоящее изобретение относится к инерционному демпферу (TMD).
Такие демпферы используются для ослабления вибраций конструкции в ограниченном диапазоне частот вокруг резонансной частоты этой конструкции. Принцип действия таких систем основан на циклической энергопередаче между кинетической и потенциальной энергиями, а также на рассеянии, точнее вязком рассеянии, кинетической энергии в каждом цикле.
Этот принцип впервые применил в 1909 г. изобретатель Х. Фрам (H. Frahm) в решении, описанном в патенте US 989 958 для уменьшения качки судна.
С тех пор было предложено множество различных других демпферов.
В некоторых их них, и в частности в демпфере, раскрытом в публикации CN 205153175, использованы первая инерционная масса, имеющая возможность поступательного перемещения, и вторая инерционная масса, которая выполнена с возможностью вращения вокруг неподвижной оси и вращательным движением которой управляет зубчатая рейка, совершающая перемещения вместе с первой инерционной массой. Возможности таких демпферов ограничены амортизацией лишь вертикальных вибраций.
В публикации CN 203034632 предложен демпфер, содержащий инерционную массу с шестернями, которая выполнена с возможностью вращения на двух зубчатых рейках, между которыми перемещается эта инерционная масса. Таким образом, перемещение инерционной массы по зубчатым рейкам сопровождается вращением этой массы вокруг собственной оси, что позволяет увеличивать кинетическую энергию посредством аккумулирования так наз. «поступательной» кинетической энергии, связанной с перемещением по зубчатым рейкам, и кинетической энергии вращения инерционной массы вокруг собственной оси. Однако возможности такого демпфера ограничены амортизацией лишь однонаправленных вибраций.
Известны также так называемые «маятниковые» демпферы.
В таких демпферах имеется инерционная масса, соединяющаяся с помощью подвесов с неподвижной рамой, которая связана с конструкцией, вибрации которой подлежат ослаблению, а также специальная система демпфирования колебаний.
Некоторые примеры маятниковых демпферов рассмотрены в документах CN 204458973U, CN 103132628A, CN 202954450U.
В документе US 2013/0326969 раскрыт маятниковый демпфер, в котором демпфирование маятникового движения инерционной массы достигается с помощью электромагнитных тормозов на индуцированных токах с генерированием при этом электричества. Подвесы соединены с неподвижной рамой с помощью шарниров, рассчитанных таким образом, чтобы они приводили во вращение пластины якоря, на которые действует магнитное поле. Пластины якоря обладают исключительно малой инерцией и принимают очень незначительное участие в аккумуляции кинетической энергии вращения по сравнению с кинетической энергией, которая создается массой, совершающей маятниковое движение.
В частности, в высотных сооружениях, где полезная площадь поверхности пола стоит очень дорого, необходимо находить некоторый компромисс между эффективностью демпфера и его объемом.
В документе ЕР 474269 раскрыт демпфер, содержащий инерционную массу, поддерживаемую двумя параллельными штангами, которые приводят ее в перемещение параллельно ей самой, без вращения вокруг ее собственной оси относительно рамы. Для увеличения кинетической энергии приходится увеличивать инерционную массу, что чревато необходимостью механического усиления штанг, а это ведет к увеличению габаритов и стоимости демпфера.
Известны и другие демпферы, раскрытые в документах JP 2000-74135, DE 10 2007 024431 и US 5005326.
Таким образом, настоящее изобретение направлено на дальнейшее усовершенствование инерционных демпферов, в частности - демпферов маятникового типа.
Для решения указанной технической проблемы предложен маятниковый инерционный демпфер, содержащий:
- группу подвесов, шарнирно соединенных с неподвижной рамой,
- подвижную раму, поддерживаемую подвесами,
- по меньшей мере одну инерционную массу, поддерживаемую подвижной рамой или неподвижной рамой,
- систему привода инерционной массы, выполненную с возможностью преобразования изменения угла по меньшей мере одного подвеса относительно подвижной рамы или неподвижной рамы в относительное движение инерционной массы относительно несущей ее рамы.
Движение инерционной массы относительно несущей ее оси представляет собой предпочтительно вращательное движение вокруг собственной оси.
Благодаря изобретению удается увеличить совокупную кинетическую энергию, добавляя к кинетической энергии, связанной с перемещением маятника, энергию движения инерционной массы относительно несущей ее рамы, в частности - энергию вращения инерционной массы относительно собственной оси.
Благодаря увеличению скорости вращения можно увеличивать кинетическую энергию вращения без необходимости увеличения массы и габаритов демпфера.
Ориентация инерционной массы относительно рамы может с течением времени изменяться вследствие ее вращения вокруг собственной оси. Инерционная масса может поворачиваться в процессе работы демпфера более чем на 180°, а предпочтительнее более чем на 360° вокруг оси собственного вращения. Предпочтительно, чтобы инерционная масса поддерживалась подвижной рамой.
Таким образом, можно уменьшать вес инерционной массы, не уменьшая совокупную кинетическую энергию относительно инерционной массы неподвижной относительно подвижной рамы, а также уменьшать вес маятника, что облегчает его установку, в частности, в верхней части высотного здания.
Система привода предпочтительно содержит понижающий механизм. Таким образом, небольшое изменение угла подвесов может быть преобразовано в значительное вращательное движение инерционной массы вокруг собственной оси.
Система привода может включать в себя ведущее зубчатое колесо, которое получает направленное вращение относительно подвижной рамы и к которому прикреплен подвес. Это ведущее зубчатое колесо может зацепляться с ведомым зубчатым колесом, получающим направленное вращение от подвижной рамы и вращающимся вместе с инерционной массой.
В соответствии с одним из вариантов осуществления, система привода содержит по меньшей мере одну зубчатую рейку. Эта рейка прикреплена по концам, например, к подвесам. Система привода может содержать шестерню, вращающуюся вместе с инерционной массой и зацепляющуюся с зубчатой рейкой.
В соответствии с одним из примеров осуществления, демпфер содержит шестерню, зацепляющуюся с зубчатой рейкой и приводящую в движение с помощью специального механизма, в частности конической зубчатой передачи, инерционную массу, которая имеет предпочтительно вертикальную ось вращения, когда демпфер находится в состоянии покоя.
Демпфер может, в частности, содержать две параллельных зубчатых рейки и пару шестерен, зацепляющихся с зубчатыми рейками и соединенных с одним и тем же валом привода инерционной массы.
В соответствии с другим примером осуществления, подвижная рама имеет первое и второе шасси, причем подвесы прикреплены к первому шасси и соединены со вторым шасси таким образом, чтобы угловое перемещение подвесов относительно вертикали сопровождалось перемещением второго шасси относительно первого. Инерционная масса соединена с шасси таким образом, чтобы перемещение этих шасси относительно друг друга сопровождалось вращательным движением инерционной массы относительно шасси. Инерционная масса может быть соединена с шасси с помощью шарнирных соединений.
Демпфирование перемещений инерционной массы, а также перемещений подвижной рамы может осуществляться по-разному, при этом может как возникать, так и не возникать необходимость в регенерации кинетической энергии с целью генерации электричества.
В соответствии с одним из примеров осуществления изобретения, инерционный демпфер содержит один или несколько вязкостных демпферов, которые могут располагаться по-разному в зависимости от конструкции демпфера. Так, например, указанные выше нижнее и верхнее шасси соединены вязкостными демпферами.
В соответствии с некоторыми примерами осуществления изобретения, инерционный демпфер содержит, по меньшей мере, один фрикционный или индукционный тормоз.
Демпфер может быть односторонним, но предпочтительно выполняется двусторонним. Он может содержать, по меньшей мере, две инерционных массы, вращающихся вокруг соответствующих осей вращения, которые перпендикулярны друг другу или соосны и ориентированы вертикально, когда демпфер находится в состоянии покоя.
В соответствии с некоторыми вариантами осуществления, инерционный демпфер содержит четыре диаметрально противоположных инерционных маховика, причем диаметрально противоположные инерционные маховики вращаются вокруг параллельных осей вращения.
Вес инерционной массы может быть таким, чтобы отношение номинальной кинетической энергии инерционной массы при вращении вокруг собственной оси к номинальной кинетической энергии при поступательном перемещении составляло от 0,4 до 100, предпочтительнее от 0,4 до 10.
Инерционный демпфер рассчитывают, как правило, на работу в условиях относительно частых ветровых, сейсмических и прочих нагрузок, при которых необходимо поддерживать заданный уровень комфорта и даже сохранять величину напряжений на уровне ниже некоторого заданного предела. В случае с высотными зданиями инерционный демпфер может быть доведен до упора из-за особых ветровых, сейсмических и прочих условий, которые, впрочем, возникают довольно редко. Под словом «номинальная» здесь следует понимать «в обычных условиях эксплуатации демпфера», то есть в диапазоне между минимальной и максимальной рабочими нагрузками. Максимальная нагрузка может соответствовать предельной нагрузке перед упором в систему защиты, предусмотренную на случайные нагрузки.
Отношение в пределах от 0,4 до 10 является предпочтительным для больших масс, как правило, превышающих 103 кг.
Вес инерционной массы может быть больше или равным 102 кг, предпочтительно 5⋅102 кг, а еще предпочтительнее - 103 кг.
В соответствии с одним из других аспектов, предметом изобретения является также строительное сооружение, в частности высотное здание или пешеходный мост, оборудованный демпфером согласно изобретению типа описанного выше.
Еще одним предметом изобретения является способ уменьшения амплитуды колебаний строительного сооружения, в частности высотного здания или пешеходного моста, с помощью демпфера типа описанного выше, в соответствии с которым дают подвижной раме возможность совершать маятниковые колебания, с тем чтобы уменьшить амплитуду колебаний строительного сооружения.
Изобретение станет более понятным из чтения нижеследующего подробного описания примеров его осуществления, не имеющих ограничительного характера, а также из рассмотрения приложенных чертежей, на которых:
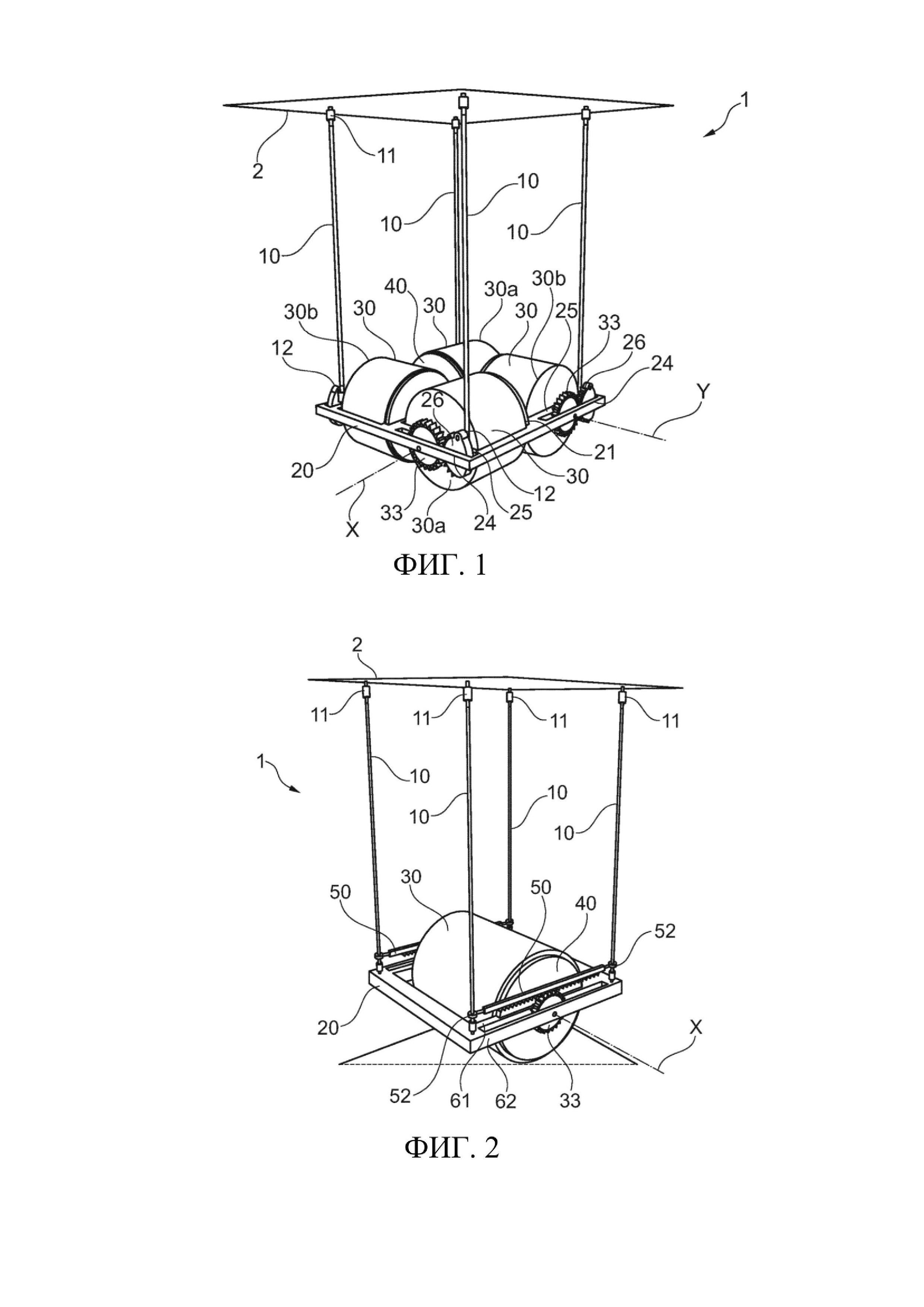
- фиг. 1 представляет собой частичное схематическое изображение в аксонометрии, иллюстрирующее один из примеров инерционного демпфера согласно изобретению,
- фиг. 2-4 представляют собой виды, аналогичные виду по фиг. 1, на которых проиллюстрированы отдельные варианты осуществления,
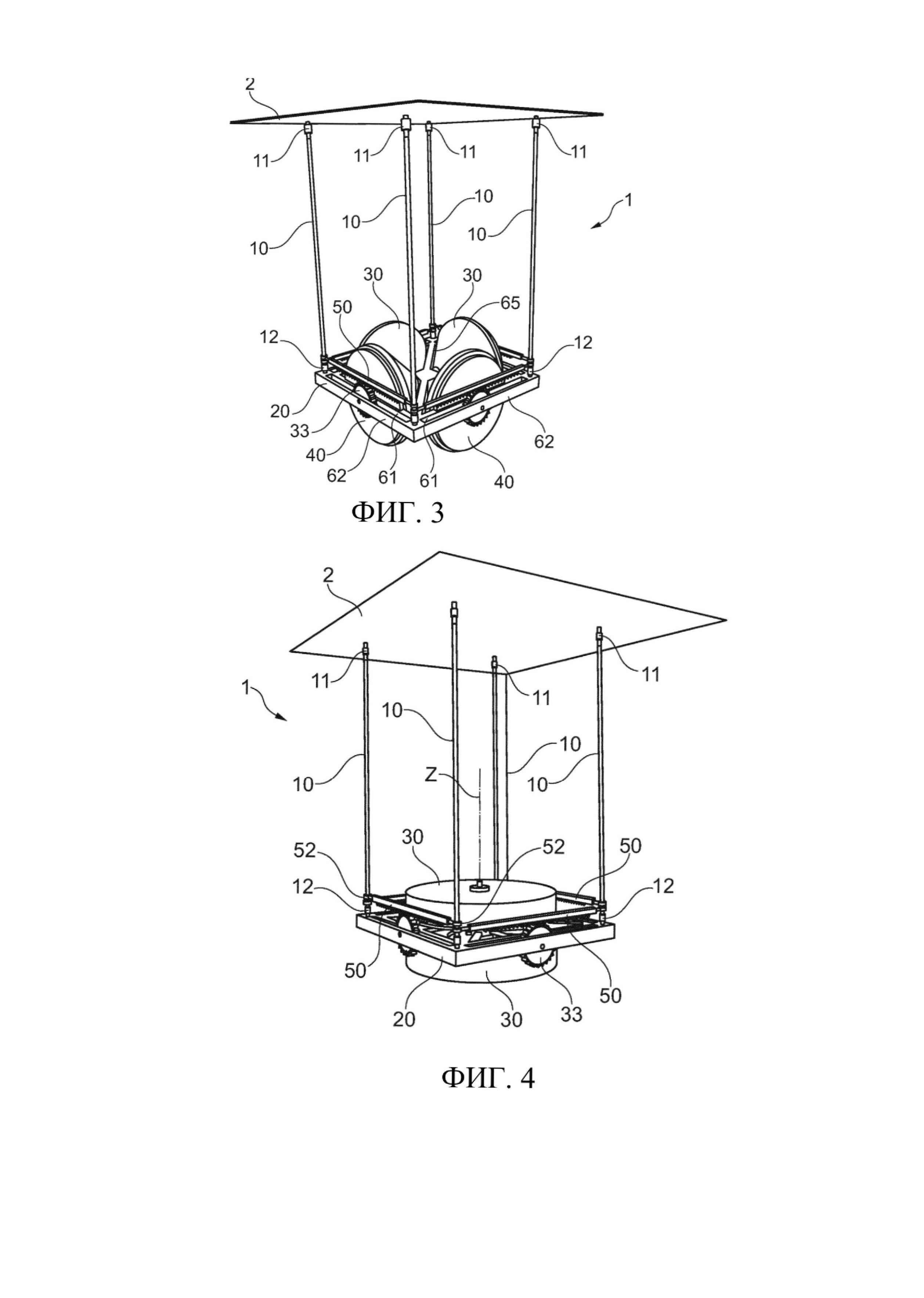
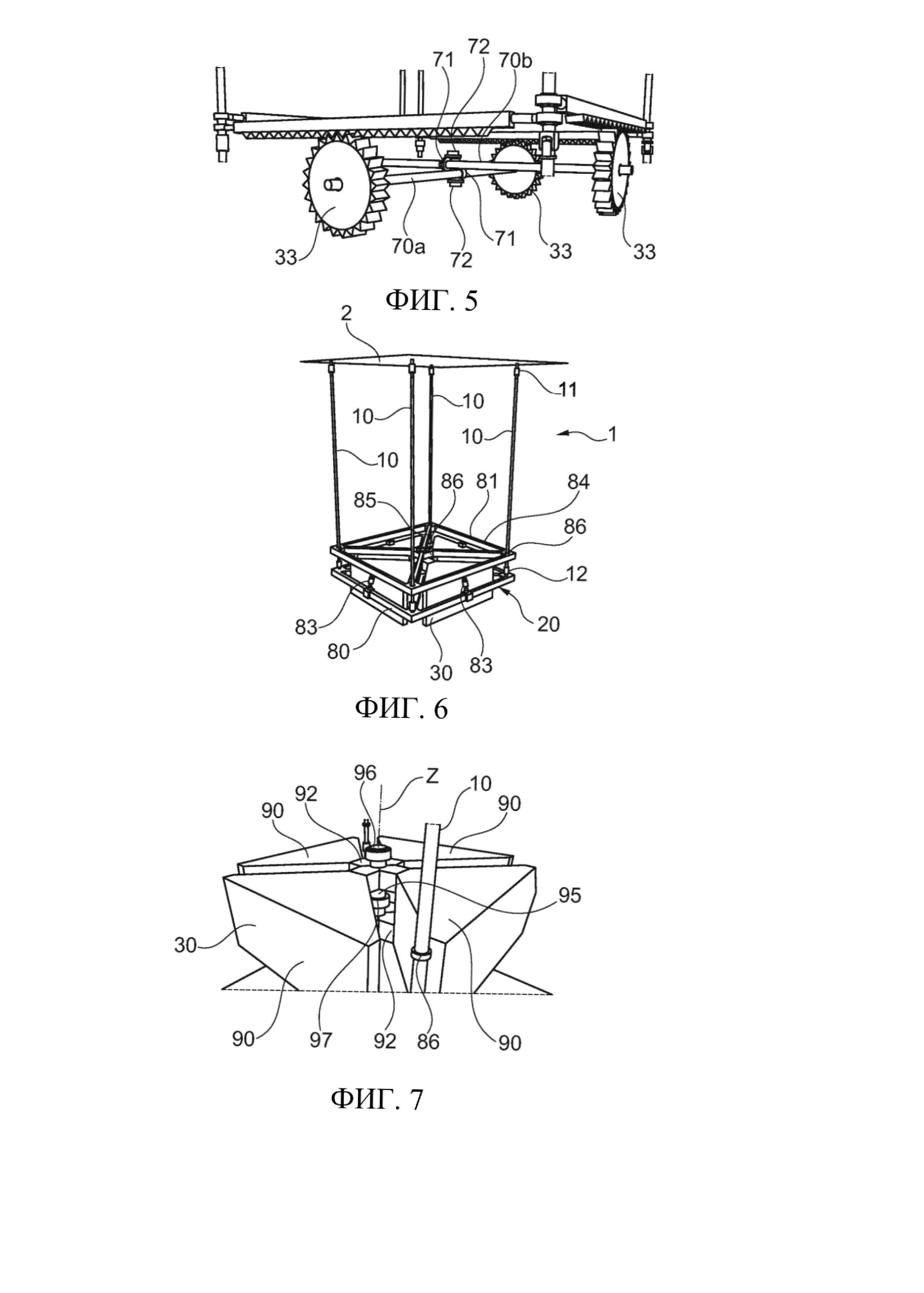
- фиг. 5 представляет собой детальный вид одной из частей системы привода инерционных маховиков демпфера по фиг. 4,
- фиг. 6 представляет собой вид, аналогичный виду по фиг. 1, на котором проиллюстрирован другой вариант осуществления,
- фиг. 7 представляет собой детальный вид, иллюстрирующий выполнение демпфера по фиг. 6.
На фиг. 1 показан инерционный демпфер 1 согласно изобретению, содержащий группу подвесов 10, в данном случае четыре подвеса.
Подвесы 10 шарнирно прикреплены верхними концами 11 к неподвижной раме 2 объекта с демпфером, например, высотного жилого здания и/или высокого служебного помещения. На своих нижних концах 12 они поддерживают подвижную раму 20, которая несет на себе четыре инерционных массы 30 в виде инерционных маховиков, каждый из которых может поворачиваться вокруг собственной оси относительно подвижной рамы. 20.
В рассматриваемом здесь примере демпфер 1 содержит два диаметрально противоположных инерционных маховика 30а, которые поворачиваются вокруг параллельных друг другу осей Х вращения, и два других инерционных маховика 30b, тоже диаметрально противоположных и поворачивающихся вокруг параллельных друг другу осей Y вращения, которые перпендикулярны к осям Х.
Подвижная рама 20 включает в себя балки 21, располагающиеся между маховиками 30 и несущие на себе подшипники, которые обеспечивают направленное вращение валов, поворачивающихся вместе с соответствующими маховиками 30.
В рассматриваемом примере на каждом валу, обеспечивающем установку соответствующего маховика с возможностью вращения на раме 20, установлено по шестерне 33.
Каждый из подвесов 10 соединен своим нижним концом 12 с зубчатым колесом 26, при этом шарнирное крепление подвеса на этом колесе выполнено с эксцентриситетом относительно оси вращения колеса. Каждое зубчатое колесо 26 зацепляется с соответствующей шестерней 33.
Таким образом, маятниковые колебания подвижной рамы 20 вместе с инерционными маховиками 30 сопровождаются изменением угла продольной оси подвесов 10 относительно подвижной рамы 30 и поворотом одного или нескольких колес 26 относительно этой рамы 20. Благодаря этому повороту приводится во вращение соответствующий инерционный маховик посредством шестерни 33, зацепляющейся с колесом 26.
Таким образом, колебание демпфера сопровождается поворотом инерционных маховиков 30 и аккумулированием кинетическое энергии при вращении, в дополнение к той, которая связана с маятниковым колебательным движением.
Колеса 26 и соответствующие шестерни 33 могут выполняться с таким расчетом, чтобы получить понижающее передаточное отношение более 1, с тем чтобы можно было увеличить скорость вращения маховиков и кинетическую энергию вращения.
Каждый маховик 30 может быть соединен, как показано на чертежах, со специальным средством вязкого торможения его вращения, то есть создающим тормозной момент, который тем больше, чем больше скорость вращения. Так, например, как показано на чертежах, каждый маховик соединен с диском индукционного тормоза.
В соответствии с вариантом осуществления, представленным на фиг. 2, на подвижной раме 20 установлена единственная инерционная масса 30 в виде инерционно маховика, вращающегося вокруг оси Х вращения.
Инерционный маховик 30 вращается вместе с двумя шестернями 33, размещенными на каждом из его осевых концов, каждая из которых зацепляется с соответствующей зубчатой рейкой 50, располагающейся между двумя подвесами 10 и соединенной с ними с помощью соединителей 52.
Таким образом, маятниковые колебания демпфера 1 в плоскости, перпендикулярной к оси Х, сопровождаются изменением угла подвесов 10 относительно подвижной рамы и перемещением зубчатых реек 50 относительно рамы, которое приводит к вращению инерционного маховика 30 вокруг оси Х.
Инерционный маховик 30 может быть снабжен тормозным диском, например, индукционного или фрикционного типа, что способствует рассеянию кинетической энергии вращения.
Подвижную раму 20 можно выполнить, предусмотрев с каждой стороны маховика 30 по две параллельных отстоящих друг от друга балки 61 и 62, между которыми будет располагаться соответствующая шестерня 33.
Конструкция по фиг. 2 выполнена односторонней.
В варианте же по фиг. 3 использована двусторонняя конструкция, содержащая подвижную раму 20, которая имеет раму, в которую помещены четыре инерционных массы 30 в виде инерционных маховиков, каждый из которых связан с шестерней 33 и зубчатой рейкой 50, причем эти массы располагаются, соответственно, вдоль четырех сторон подвижной рамы 20. Эта последняя может быть снабжена, как показано на чертеже, двумя крестообразными балками 65, которые объединены посередине и соединяются, соответственно, с четырьмя углами рамы 20.
Как показано на чертеже, каждый инерционный маховик 30 может иметь в целом форму усеченного конуса, сходящегося к центру рамы 20. Каждый маховик 30 может быть снабжен тормозом 40, например, индукционного или фрикционного типа.
В соответствии с вариантом осуществления, приведенном на фиг. 4, демпфер 1 содержит два инерционных маховика 30, которые выполнены соосными и поворачиваются вокруг оси Z вращения, которая является вертикальной, когда демпфер находится в состоянии покоя.
Система привода маховиков 30 содержит, как и в примере осуществления по фиг. 3, четыре зубчатых рейки 50, которые соединяют друг с другом два смежных подвеса 10 и связаны с этими последними таким образом, чтобы колебания подвижной рамы 20 сопровождались перемещением зубчатых реек 50 параллельно соответствующим сторонам рамы 20.
Перемещение зубчатых реек 50 передается инерционным маховикам 30 с помощью шестерен 33. Две противоположных шестерни соединяются валом 70а, а две других - вторым валом 70b, который пересекается с первым. Шестерни 33 получают направленное вращение от рамы 20 и поворачиваются, как видно на фиг. 5, вместе с валами 70а и 70b. На каждом валу 70а или 70b установлено соответствующее коническое зубчатое колесо 71, которое зацепляется с коническим зубчатым колесом 72, поворачивающимся вместе с соответствующим инерционным маховиком 30, в результате чего вращение шестерен 33 вокруг собственных осей сопровождается поворотом соответствующего инерционного маховика 30 вокруг оси Z вращения.
Таким образом, инерционный демпфер 1 по фиг. 4 является двусторонним.
На фиг. 6 и 7 представлен один из вариантов осуществления инерционного демпфера 1 без зубчатой передачи для понижения передаточного отношения углового перемещения подвесов 10 относительно подвижной рамы 20.
В соответствии с этим примером осуществления, подвижная рама 33 снабжена нижним шасси 80 и верхним шасси 81 со сходными формами, которые имеют наружную раму многоугольной формы, в данном случае квадратной формы, и Х-образную структуру с двумя балками 85, которые объединены в середине 86 и соединяются своими концами с углами рамы 84.
Шасси 80 и 81 соединены друг с другом вязкостными демпферами 83, которые располагаются, например, в середине длины сторон каждого шасси.
Каждый подвес 10 шарнирно соединен своим нижним концом 12 с нижним шасси 80 и проходит благодаря соответствующему отверстию 86 с некоторым зазором через верхнее шасси 81.
Таким образом, при маятниковом колебании подвижной рамы 20 изменение угла подвесов относительно нижнего шасси 80 сопровождается перемещением верхнего шасси 81 относительно нижнего шасси 80. Вследствие этого центральные части 86 шасси 80 и 81 получают некоторое смещение оси, которое изменяется в процессе колебаний подвижной рамы 20.
Инерционный демпфер 1 содержит единственную инерционную массу 30, включающую в себя четыре блока 90 в целом пирамидальной формы со схождением к центру, которые соединяются двумя крестами 92, отстоящими друг от друга по вертикали. Кресты 92 соединены валом 95 с осью Z, которая является вертикальной, когда демпфер 1 находится в состоянии покоя. Вал 95 снабжен шарнирами 97, которые входят, соответственно, в центральные части 86 верхнего 81 и нижнего 80 шасси.
Таким образом, перемещение верхнего шасси 81 относительно нижнего шасси 80 сопровождается качанием вала 95 и поворотом блоков 90. При этом указанные блоки становятся вписанными в треугольники, образуемые Х-образными структурами верхнего и нижнего шасси.
Должно быть совершенно очевидно, что изобретение не ограничивается описанными выше примерами.
Так, в частности, можно выполнить по-другому инерционную массу и механизм, обеспечивающий передачу изменения угла подвеса относительно вертикали на инерционную массу, с тем чтобы привести ее во вращение вокруг собственной оси.
Выражение «содержащий (такой-то элемент)» следует понимать как синонимичное выражению «содержащий, по меньшей мере, один (такой-то элемент)», а выражение «составляющий от … до … - как «составляющий от … до … включительно».
Реферат
Изобретение относится к инерционному демпферу. Маятниковый инерционный демпфер содержит группу подвесов, шарнирно соединенных с неподвижной рамой, подвижную раму, поддерживаемую подвесами, по меньшей мере одну инерционную массу, поддерживаемую неподвижной рамой или подвижной рамой, систему привода инерционной массы, выполненную с возможностью преобразования изменения угла по меньшей мере одного подвеса относительно неподвижной рамы или подвижной рамы в движение инерционной массы относительно несущей ее рамы. Изобретение позволяет увеличить совокупную кинетическую энергию демпфера без увеличения его массы и габаритов и облегчить его установку. 3 н. и 18 з.п. ф-лы, 7 ил.
Комментарии