Винт приспособленного к зависанию летательного аппарата, содержащий устройство демпфирования вибрации - RU2652491C2
Код документа: RU2652491C2
Чертежи


Описание
Настоящее изобретение относится к винту приспособленного к зависанию летательного аппарата, в частности несущему винту вертолета, содержащему устройство демпфирования вибрации.
Известны вертолеты, которые, главным образом, содержат фюзеляж; несущий винт сверху фюзеляжа, и который вращается вокруг соответствующей оси; хвостовой винт на заднем конце фюзеляжа; две горизонтальных поверхности хвостового оперения; и две вертикальных поверхности хвостового оперения.
Более конкретно, винт, главным образом, содержит втулку, которая вращается вокруг упомянутой оси и имеет множество лопастей, прикрепленных и выступающих радиально из втулки; и приводной вал, соединяемый с приводным элементом и соединенный функционально с втулкой, чтобы вращать ее.
Работа винта формирует высоко- и низкочастотную вибрацию. Более конкретно, низкочастотная вибрация формируется спутной струей от лопастей и от центра втулки. Спутная струя от центра втулки ударяет вертикальные и горизонтальные аэродинамические поверхности хвостового оперения и хвостовой винт.
Чтобы избежать формирования низкочастотной вибрации, винт содержит устройство отклонения потока, установленное над центром винта и проходящее кольцеобразно вокруг оси вращения ротора.
Более конкретно, устройство отклонения потока предназначается, чтобы направлять спутную струю, формируемую винтом, так, чтобы избегать воздействий спутной струи и предотвращать ударение спутной струи о хвостовой винт и соответствующие поддерживающие структуры.
Высокоскоростное вращение лопастей также формирует высокочастотную вибрацию, которая передается приводному валу и, следовательно, вертолету.
Формирование и передача высокочастотной вибрации к приводному валу винта предотвращаются с помощью демпфирующих устройств, установленных на винт и настроенных на одну или более частот высокочастотной вибрации.
Одно такое демпфирующее устройство описывается в патентных заявках GB-A-2014099 и FR-A-2749901.
В частности, FR-A-2749901 раскрывает демпфирующее устройство, которое уменьшает передачу вибраций в плоскости, ортогональной оси винта, к фюзеляжу. Демпфирующее устройство содержит приводное средство, которое приводит груз в требуемое положение регулировки вдоль оси винта, без оказания какого-либо демпфирующего действия на этот груз.
В результате, демпфирующее устройство, показанное в FR-A-2749901, не может никаким образом уменьшать передачу осевых вибраций от лопастей к фюзеляжу.
Патентная заявка Заявителя PCTIB2008001594 описывает простое, недорогое демпфирующее устройство, предназначенное, чтобы предотвращать формирование и передачу высокочастотной вибрации к приводному валу винта, без помехи аэродинамике и работе винта и/или устройства отклонения потока.
Более конкретно, вышеупомянутое демпфирующее устройство, главным образом, содержит:
груз, размещенный в устройстве отклонения потока; и
стержень, который поддерживается соосно посредством вала на первом осевом конце и соединяется с грузом на втором осевом конце, противоположном первому концу.
Более конкретно, стержень является достаточно жестким в осевом направлении, чтобы закреплять груз в практически фиксированном положении вдоль оси винта.
Наоборот, жесткость на изгиб стержня является такой, чтобы предоставлять возможность грузу вибрировать в плоскости, перпендикулярной оси винта, и с характерной частотой вибрации винта и, следовательно, препятствовать передаче валу изгибного колебания, формируемого вращением втулки и лопастей.
Демпфирующее устройство, описанное выше, следовательно, лишь эффективно препятствует передаче валу изгибного колебания в плоскости, практически перпендикулярной оси винта, и с частотой около конкретной данной частоты, определенной изгибной жесткостью стержня и весом груза.
Другими словами, демпфирующее устройство, описанное выше, является "пассивным" элементом, настроенным на конкретную частоту изгибного колебания для демпфирования.
В промышленности возрастает необходимость также эффективно препятствовать передаче валу осевого колебания, т.е., параллельного оси вала.
Следом за внедрением в вертолеты винтов с регулируемой скоростью вращения, т.е., предназначенных, чтобы вращаться с различными скоростями во время эксплуатации вертолета, также возрастает необходимость предотвращать передачу приводному валу вибрации с очень переменчивым частотным диапазоном.
Целью настоящего изобретения является предоставление винта приспособленного к зависанию летательного аппарата, чтобы удовлетворять, по меньшей мере, одному из вышеописанных требований несложным, недорогим образом.
Согласно настоящему изобретению предоставляется винт приспособленного к зависанию летательного аппарата, который заявлен в пункте 1 формулы изобретения.
Предпочтительный, неограничивающий вариант осуществления настоящего изобретения будет описан посредством примера со ссылкой на присоединенные чертежи, на которых:
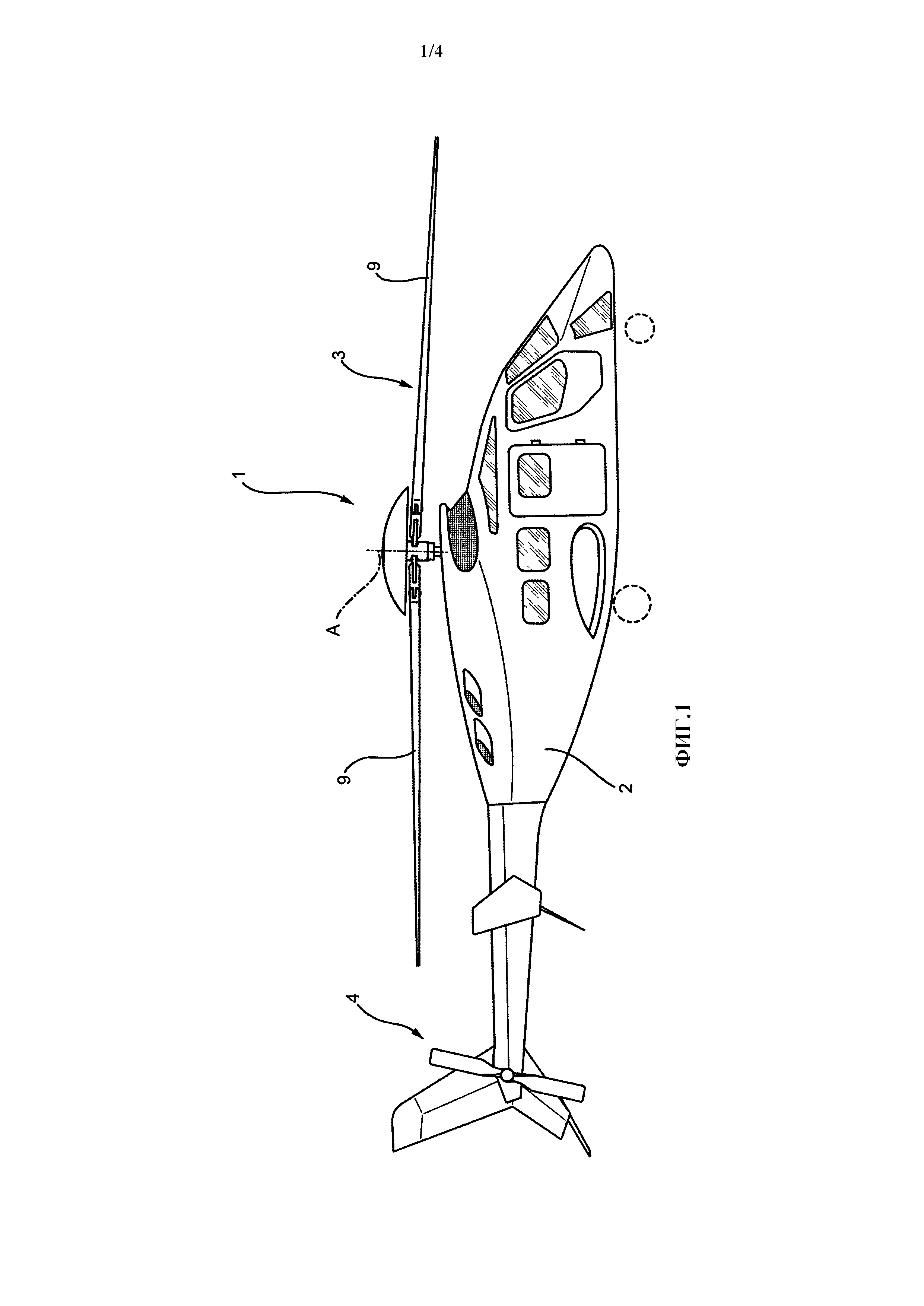
Фиг. 1 показывает вид сбоку вертолета, содержащего винт в соответствии с настоящим изобретением;
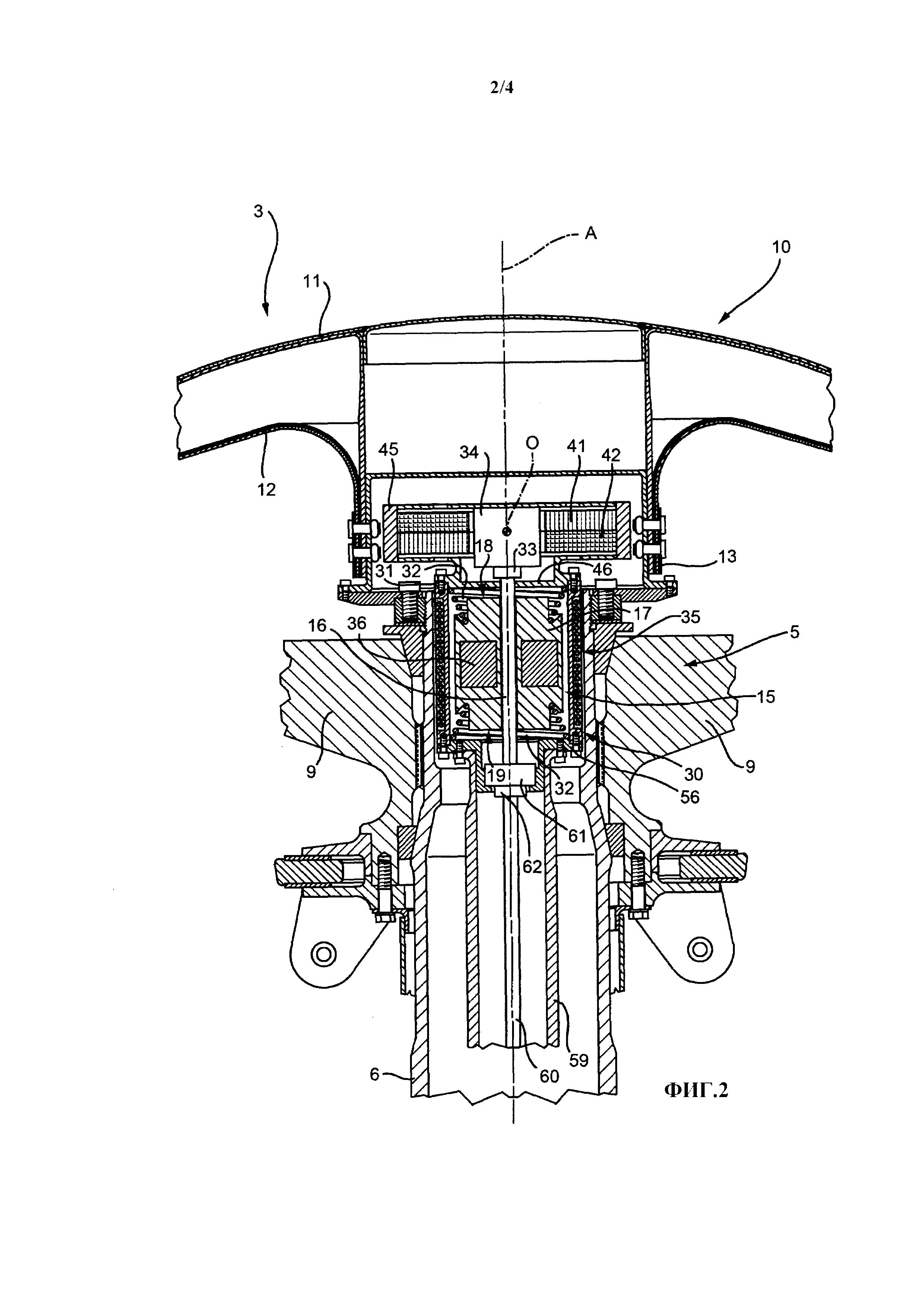
Фиг. 2 показывает секцию винта на фиг. 1 с частями, показанными только частично ради ясности;
Фиг. 3 показывает множество составных частей винта на фиг. 1 и 2;
Фиг. 4 показывает схему дополнительных составных частей винта на фиг. 1-3.
Число 1 на фиг. 1 указывает приспособленный к зависанию летательный аппарат, в частности, вертолет, главным образом, содержащий фюзеляж 2; несущий винт 3, который расположен в верхней части фюзеляжа 2 и который вращается вокруг оси A; и хвостовой винт 4, который расположен на заднем конце фюзеляжа 2 и который вращается вокруг соответствующей оси, поперечной относительно оси A.
Более конкретно, винт 3 содержит полую втулку 5, по оси A, подходящую для лопастей и из которой выступает множество лопастей 9, проходящих радиально относительно оси A.
Винт 3 также содержит приводной вал 6, который вращается вокруг оси A, объединяется под углом с втулкой 5 и соединяется, непоказанным способом, с приводным элементом, например, турбиной, на вертолете 1. Более конкретно, вал 6 является полым.
Более конкретно (фиг. 2), вал 6 размещается частично внутри втулки 5 и соединяется как одно целое под углом с втулкой 5 посредством шлица и посредством двух клиньев, вставленных радиально между валом 6 и втулкой 5. Более конкретно, шлиц вставляется в направлении оси между двумя клиньями.
Винт 3 также содержит устройство 10 отклонения потока для направления спутной струи, формируемой вращением винта 3, по заданному маршруту, предназначенному, чтобы предотвращать колебание, формируемое спутной струей от концов лопастей 9 на противоположных сторонах втулки 5.
Более конкретно, отклоняющее устройство 10 является кольцеобразным, протягивается вокруг оси A и находится на противоположной стороне втулки 5 по отношению к фюзеляжу 2.
Отклоняющее устройство 10 представлено в форме "колпака" и ограничивается двумя обращенными в осевом направлении стенками 11 и 12. Более конкретно, стенка 11 определяет отклоняющее устройство 10 в осевом направлении на противоположной стороне по отношению к втулке 5, а стенка 12 определяет отклоняющее устройство 10 в осевом направлении на стороне втулки 5.
Стенка 11 является непрерывной и проходит, радиально наружу от оси A, при уменьшающихся осевых расстояниях от втулки 5.
Стенка 12 имеет круглую первую наружную кромку 13; и вторую наружную кромку (не показана на фиг. 2), противоположную и расположенную радиально наружу от внешней кромки 13. Вторая внешняя кромка стенки 12 также обращена в осевом направлении к наружной кромке стенки 11.
Стенки 11 и 12 сконструированы так, что осевое расстояние между ними уменьшается радиально наружу от оси A.
Более конкретно, действуя от кромки 13 до второй кромки, стенка 12 протягивается сначала от, а затем к втулке 5.
Стенки 11 и 12 соединяются друг с другом посредством полого тела в форме усеченного конуса, симметричного относительно оси A и поперечная поверхность которого протягивается между стенками 11 и 12.
Винт 3 также содержит устройство 15 демпфирования вибрации.
Устройство 15, главным образом, содержит груз 17, соединенный с втулкой 5 и с валом 6, чтобы препятствовать передаче вибрации, формируемой вращением лопастей 9.
Груз 17 преимущественно свободен, чтобы колебаться параллельно оси A, чтобы предотвращать передачу вибрации, параллельной оси A, валу 6 и, следовательно, втулке 5 и фюзеляжу 2.
Другими словами, устройство 15 уменьшает передачу осевой вибрации валу 6.
Устройство 15 также содержит актуатор 30, соединенный с грузом 17 и управляемый, чтобы формировать на грузе 17 первое демпфирующее усилие с основной компонентой, параллельной оси A, с тем, чтобы предотвращать передачу вибрации, параллельной оси A, валу 6 и втулке 5.
Более конкретно, устройство 15 содержит направляющую 16, соосную с осью A, и вдоль которой монтируется груз 17, чтобы колебаться параллельно оси A.
Актуатор 30 содержит тело 31, размещенное в валу 6 и определяющее полость для размещения груза 17.
Направляющая 16 проходит сквозь тело 31.
Груз 17 является трубчатым телом с осью A, через которое направляющая 16 проходит соосно.
Более конкретно, груз 17 соединяется упруго, на противоположных осевых конечных поверхностях 18 и 19, с телом 31 упругим средством.
В показанном примере упругое средство содержит первую и вторую винтовую пружину 32 с соответствующими осями, параллельными оси A.
Первая пружина 32 вставляется между поверхностью 18 и телом 45 устройства 15, а вторая пружина 32 вставляется между поверхностью 19 и телом 56 актуатора 30, присоединенного к телу 31.
Другими словами, груз 17 упруго подвешивается внутри тела 31, чтобы колебаться вдоль направляющей 16.
Жесткость, параллельно оси A, каждой витой пружины и размер груза 17 предпочтительно таковы, что собственная частота системы, сформированной ими, равна N*Ω, где N - это число лопастей 9, а Ω - это частота вращения вала 6.
Устройство 15 также содержит:
- датчик 33 (показанный схематично на фиг. 2) для формирования множества сигналов, ассоциированных с состоянием ускорения вала 6 параллельно оси A и в плоскости, перпендикулярной оси A; и
- блок 34 управления (фиг. 4), предназначенный, чтобы формировать демпфирующее усилие на грузе 17 на основе одного из сигналов, сформированных датчиком 33.
Более конкретно, датчик 33 является акселерометром, который обнаруживает значения ускорения в центре O втулки 5, в направлении, параллельном оси A, и в двух направлениях в плоскости, перпендикулярной оси A.
В показанном примере датчик 33 устанавливается вдоль оси A. Предпочтительно, датчик 33 размещается в центре O втулки 5.
Блок 34 управления управляет актуатором 30 на основе значения ускорения, параллельного оси A, обнаруженной датчиком 33.
Актуатор управляется посредством блока 34 управления, чтобы формировать на грузе 17 синусоидальное первое демпфирующее усилие, имеющее основную компоненту вдоль оси A, и частоту около N*Ω, где N - это число лопастей 9, а Ω - это частота вращения вала 6.
Это синусоидальное усилие заставляет груз 17 колебаться параллельно оси A и колебаться вдоль направляющей 16.
В варианте осуществления на фиг. 2 актуатор 30 содержит:
- множество обмоток 35, совмещенных с телом 31 и соединенных функционально с блоком 34 управления; и
- постоянный магнит 36, помещенный на груз 17 и соединенный магнитным образом с обмотками 35.
Более конкретно, блок 34 управления вынуждает переменный ток циркулировать в обмотках 35. Посредством магнитной связи между обмотками 35 и постоянным магнитом 36, переменный ток формирует первое демпфирующее усилие, направленное параллельно оси A, на груз 17.
Устройство 15 также содержит два актуатора 41, 42, соединенных с валом 6 и управляемых, чтобы формировать на валу 6, соответственно, второе и третье демпфирующее усилие с компонентами в плоскости, перпендикулярной оси A.
Актуаторы 41 и 42, таким образом, уменьшают передачу валу 6, и, следовательно, втулке 5 и фюзеляжу 2, усилий в плоскости, перпендикулярной оси A.
Более конкретно, актуаторы 41, 42 представлены в форме наложенных колец, вращаемых валом 6 и установленных, чтобы вращаться относительно вала 6 вокруг оси A.
Актуатор 41 вращается относительно вала 6 вокруг оси A в том же направлении, что и вращение вала 6 вокруг оси A, и с частотой (N-1)*Ω.
Второе демпфирующее усилие, формируемое на валу 6 актуатором 41, является синусоидальным, с частотой (N-1)*Ω.
Актуатор 42 вращается вокруг оси A в противоположном направлении по отношению к вращению вала 6 и с частотой (N+1)*Ω.
Третье демпфирующее усилие, формируемое на приводном валу 6 актуатором 42, является синусоидальным с частотой (N+1)*Ω.
Второе и третье демпфирующее усилие, следовательно, оба имеют, относительно фюзеляжа 2, частоту N*Ω, где N - это число лопастей 9, а Ω - это частота вращения вала 6. Частота N*Ω соответствует частоте вибрации для демпфирования, т.е. вибрации, передаваемой от лопастей 9 фюзеляжу 2.
Актуаторы 41, 42 размещаются внутри и вращаются относительно тела 45, которое вращается вокруг оси A и прикрепляется к телу 31, и, следовательно, к валу 6 и втулке 5.
Более конкретно, тело 45 является полым и размещается, относительно тела 31, на той же стороне, что и отклоняющее устройство 10, и на противоположной стороне по отношению к телу 56.
Блок 34 управления также размещается в теле 45 и окружается актуаторами 41, 42.
Тело 45 предпочтительно содержит основание 46, расположенное на стороне груза 17 и прикрепленное к направляющей 16. Тело 45 также прикрепляется к блоку 34 управления.
Более конкретно, актуаторы 41, 42 являются формирующими центробежную силу типами, т.е. каждый содержит диск, эксцентричный относительно соответствующей оси B, C.
Амплитуда второго и третьего демпфирующего усилий, формируемых актуаторами 41, 42, получается посредством регулирования углового расстояния между двумя эксцентриковыми дисками актуаторов 41, 42.
Фаза второго и третьего демпфирующего усилия, формируемого актуаторами 41, 42, управляется посредством регулировки среднего значения азимута соответствующих эксцентриковых дисков.
В зависимости от скорости вращения актуаторов 41, 42 относительно оси A положение соответствующих грузов изменяется так, чтобы соответствующим образом формировать синусоидальное второе и третье демпфирующее усилие, изменяющееся по модулю и фазе.
Актуаторы 41, 42 управляются посредством блока 34 управления на основе величины, измеренной датчиком 33.
Как показано схематично на фиг. 4, блок 34 управления содержит множество каскадов 37a, 37b, 37c, каждый из которых принимает соответствующий входной сигнал 26a, 26b, 26c от датчика 33 и подает соответствующий выходной сигнал 27a, 27b, 27c для соответствующего актуатора 30, 41, 42.
Более конкретно, каскады 37a, 37b, 37c являются независимыми друг от друга, т.е. каждый каскад 37a, 37b, 37c принимает только соответствующий входной сигнал 26a, 26b, 26c и формирует только соответствующий выходной сигнал 27a, 27b, 27c.
Наконец, устройство 15 содержит:
- кабель 60, соединенный электрически с источником электроэнергии (не показан), фиксированным относительно оси A;
- трубопровод 59, размещающий в себе кабель 60;
- токосъемное кольцо 60, соединенное электрически с кабелем 60 и для поддержания электрического соединения между кабелем 60, зафиксированным относительно оси A, и блоком 34 управления; и
- кодер 62 для определения углового положения вала 6 вокруг оси A.
Кабель 60, трубопровод 59, токосъемное кольцо 61 и кодер 62 располагаются на противоположной в осевом направлении стороне от оси A по отношению к отклоняющему устройству 10.
Кабель 60, кодер 62, токосъемное кольцо 61 и трубопровод 59 проходят соосно с осью A.
Трубопровод 59 прикрепляется к телу 56, с противоположной стороны по отношению к телу 31.
При фактическом использовании вал 6 вращает втулку 5 и лопасти 9 вокруг оси A.
Более конкретно, вал 6 может вращаться вокруг оси A с переменной угловой скоростью и, следовательно, переменной частотой Ω.
Вращение втулки 5 и лопастей 9 формирует вибрацию, которая передается валу 6 и от него фюзеляжу 2 вертолета 1.
Эта вибрация имеет преимущественно частоту N*Ω, где N - число лопастей 9, а Ω - это частота вращения вала 6.
Ускорение вала 6 измеряется датчиком 33.
На основе значений ускорения, параллельного оси A, блок 34 управления дает команду актуатору 30 формировать первое демпфирующее усилие на грузе 17. Первое демпфирующее усилие является синусоидальным, направляется параллельно оси A и имеет частоту N*Ω.
Первое демпфирующее усилие вынуждает груз 17 колебаться вдоль оси A по направляющей 16 и, таким образом, демпфирует вибрацию, передаваемую валу 6 и фюзеляжу 2 с компонентой, параллельной оси A.
Более конкретно, блок 34 управления вынуждает переменный ток протекать внутри электрических обмоток 35. И, вследствие магнитной связи между электрическими обмотками 35 и постоянным магнитом 36, первое осевое демпфирующее усилие формируется на грузе 17.
На основе значений ускорения, измеренных датчиком 33, в плоскости, перпендикулярной оси A, блок 34 управления также дает команду актуаторам 41 и 42 формировать второе и третье демпфирующее усилие, соответственно, на грузе 17.
Более конкретно, актуатор 41 вращается в том же направлении, что и вал 6, с частотой (N-1)*Ω.
Второе демпфирующее усилие, формируемое актуатором 41, является синусоидальным, лежит в плоскости, параллельной оси вала 6, и направляется радиально относительно оси A.
Второе демпфирующее усилие имеет частоту (N-1)*Ω.
Актуатор 42 вращается в противоположном направлении по отношению к валу 6 с частотой (N+1)*Ω.
Третье демпфирующее усилие, формируемое актуатором 42, является синусоидальным, лежит в плоскости, параллельной оси вала 6, и направляется радиально относительно оси A.
Третье демпфирующее усилие имеет частоту (N+1)*Ω.
Поскольку актуатор 41 вращается вокруг оси A с частотой (N-1)*Ω в том же направлении, что и вал 6, и актуатор 42 вращается вокруг оси A с частотой (N+1)*Ω в противоположном направлении по отношению к валу 6, оба имеют, относительно фюзеляжа 2, частоты вращения N*Ω и вращаются, соответственно, в том же и противоположном направлении по отношению к валу 6.
Частота вращения актуаторов 41, 42 по отношению к фюзеляжу 2, следовательно, соответствует частоте N*Ω вибрации для демпфирования и наводится на фюзеляже 2 лопастями 9.
Актуаторы 41, 42, таким образом, являются эффективными в уменьшении передачи фюзеляжу 2 вибрации в плоскости, параллельной оси A.
Преимущества винта 3 согласно настоящему изобретению будут ясны из вышеприведенного описания.
В частности, устройство 15 предоставляет возможность грузу 17 колебаться свободно вдоль оси A, таким образом, предоставляя возможность грузу 17, в отличие от решений, описанных во введении, эффективно предотвращать передачу вибрации, направленной параллельно оси A, от лопастей 9 к фюзеляжу 2.
Актуатор 30 устройства 15 также оказывает на груз 17 первое демпфирующее усилие, направленное параллельно оси A, и с частотой N*Ω.
Таким образом, устройство 15 имеет возможность уменьшать передачу вибрации от лопастей 9 к фюзеляжу 2 в пределах широкого диапазона частот вибрации.
Это делает устройство 15 особенно подходящим для использования на винте 3 с переменной скоростью вращения.
Фактически, поскольку скорость вращения винта изменяется, частота N*Ω вибрации, передаваемой от лопастей 9 фюзеляжу 2, изменяется соответствующим образом. И устройство 15 может адаптироваться к этому изменению в скорости вращения винта 3, просто управляя актуатором 30, чтобы изменять частоту первого демпфирующего усилия.
Собственная частота вибрации вдоль оси A системы, определенной грузом 17 и упругим средством 32, соответствует частоте N*Ω вибрации для демпфирования.
Энергия, требуемая, чтобы формировать первое демпфирующее усилие, может, таким образом, быть уменьшена.
Кроме того, в случае неисправности или отказа актуатора 30 груз 17 продолжает свободно колебаться с частотой, равной частоте N*Ω вибрации для демпфирования, таким образом, по меньшей мере, частично продолжая уменьшать вибрацию, передаваемую фюзеляжу 2.
Актуаторы 41, 42 уменьшают вибрацию, передаваемую фюзеляжу 2 в плоскости, перпендикулярной оси A, и являются активно настраиваемыми на различные частоты Ω вращения винта 3.
Блок 34 управления управляет актуаторами 30, 41, 42 на основе входных сигналов, формируемых одним датчиком 33, и формирует выходные управляющие сигналы для актуаторов 30, 41, 42.
Каждый каскад 37a, 37b, 37c блока 34 управления принимает соответствующий входной сигнал 26a, 26b, 26c и предоставляет соответствующий выходной сигнал 27a, 27b, 27c, который зависит исключительно от соответствующего входного сигнала 26a, 26b, 26c.
Логика блока 34 управления, поэтому, является чрезвычайно простой, таким образом, уменьшая общую стоимость устройства 15.
Устройство 15 может быть легко установлено, чтобы обновлять существующие винты 3, содержащие втулку 5, вал 6 и лопасти 9.
Это может быть выполнено посредством простого крепления устройства 15 внутри винта 3 и присоединения кабеля 60 к источнику электроэнергии.
Несомненно, в винте 3, который описан и иллюстрирован в данном документе, могут быть сделаны изменения, однако, без отступления от защищающих рамок, определенных в сопровождающей формуле изобретения.
Более конкретно, актуатор 30 может быть заменен двумя актуаторами, аналогичными актуаторам 41, 42, установленными между актуаторами 41 и 42 и вращающимися в соответствующих противоположных направлениях.
Датчик 33 может формировать сигнал, ассоциированный исключительно с ускорением, параллельным оси A вала 6.
Как противоположность акселерометру, датчик 33 может быть датчиком деформации или нагрузки или гибридным датчиком для измерения как нагрузки, так и ускорения вала 6.
Реферат
Изобретение относится к области авиации, в частности к устройствам гашения вибраций несущего винта. Винт (3) приспособленного к зависанию летательного аппарата имеет втулку (5), которая вращается вокруг оси (A) и имеет множество лопастей (9), ведущий вал (6), соединяемый с приводным элементом летательного аппарата (1) и соединенный функционально с втулкой (5), чтобы вращать втулку (5) вокруг оси (A) и демпфирующее средство (15) для демпфирования вибрации, передаваемой валу (6). Демпфирующее средство включает в себя груз (17), предназначенный, чтобы колебаться при использовании так, чтобы препятствовать передаче валу (6) вибрации, формируемой вращением лопастей (9). Груз (17) свободен для того, чтобы колебаться параллельно оси (A), чтобы препятствовать передаче валу (6) вибрации, имеющей основные компоненты вдоль оси (A). Обеспечивается эффективное препятствование передачи валу осевого колебания. 2 н. и 11 з.п. ф-лы, 4 ил.
Комментарии