Устройство фиксации позвоночника и педикулярный винт для него - RU2423090C2
Код документа: RU2423090C2
Чертежи








Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству фиксации положения позвоночника, содержащему по крайней мере два педикулярных винта и по крайней мере один промежуточный соединительный элемент. Настоящее изобретение также относится к педикулярным винтам, имеющим подвижный шаровой элемент в подвижной головке винта для упрощения введения соединительного элемента, что обеспечивает в данной конструкции восстановление оптимального положения позвонков и одновременно плотный охват соединительного элемента.
Уровень техники
Известны варианты выполнения, в которых выполняется удержание соединительного элемента в головке винта педикулярного винта вдоль центральной оси, что обеспечивает определенную гибкость даже после имплантации.
Так, в документе US 2003/0220642 А1 раскрывается в одном из вариантов выполнения эластичный соединительный элемент с резьбой и связанные с ним педикулярные винты, в головках винтов которых имеется ответная резьба, поэтому соединительный элемент может быть введен в головки винтов вращательными движениями и может перемещаться вдоль своей продольной оси.
В документе ЕРО 669109 В1 описывается поддерживающее устройство для позвоночника, в котором обеспечивается меньшая свобода перемещения соединительного элемента вдоль его продольной оси по сравнению с перемещением отдельных педикулярных винтов относительно друг друга. С этой целью в качестве соединительного элемента используется гибкая пластина, и к пластине прикрепляется слегка деформируемый опорный элемент, причем опорный элемент упирается соответственно в головки винтов двух педикулярных винтов.
В документе US 6,761,719 В2 раскрывается поддерживающее устройство для позвоночника, в котором перемещение обеспечивается посредством введения в качестве соединительного элемента между позвонками металла с памятью формы, который обладает свойством псевдоэластичности при температуре тела.
В вариантах выполнения, приведенных в WO 03/037216 А2, делается попытка достигнуть гибкости соединительного элемента путем использования гибкого соединительного элемента, выполненного, например, из полиэфира, полиэтилена, полилактида или нитинола, который закрепляется в головках винтов педикулярных винтов и совершенно не в состоянии перемещаться внутри них.
Раскрытие изобретения
Задачей настоящего изобретения является создание устройства для фиксации позвоночника, которое может плотно охватывать соединительный элемент и которое, с другой стороны, обеспечивает восстановление оптимального положения позвонков.
Эта задача решается в устройстве в соответствии с п.10 формулы, а также связанными с ним педикулярными винтами в соответствии с п.1 формулы.
Предложен педикулярный винт, содержащий хвостовик винта со сферическим наконечником, головку винта, имеющую два расположенные друг против друга углубления, который отличается тем, что сферический наконечник имеет две расположенные друг против друга параллельные поверхности, прилегающие к соответствующим параллельным поверхностям головки винта, а продольная ось проходит через два расположенных друг против друга углубления головки винта перпендикулярно параллельным плоскостям головки винта.
В предпочтительном варианте шаровой элемент с вырезом для установки соединительного элемента установлен с возможностью перемещения в головке винта.
Шаровой элемент также может иметь отверстие вдоль оси, проходящей через два продолговатых отверстия.
В частном случае шаровой элемент может состоять из двух полусфер, опирающихся друг на друга.
В другом предпочтительном варианте головка винта опирается на сферический наконечник хвостовика винта, при этом головка винта установлена с возможностью наклона в одной плоскости вокруг центральной оси.
Педикулярный винт может содержать фиксатор, а головка винта также может иметь выпуклую поверхность со стороны, обращенной к хвостовику винта, и отверстие введения фиксатора, расположенное со стороны, противоположной хвостовику винта.
Средство фиксации может представлять собой резьбовой штырь.
В одном из вариантов полусфера, обращенная к фиксатору, имеет вырез для введения в него направляющего штифта фиксатора.
Другой аспект изобретения представляет собой устройство фиксации позвоночника, которое содержит по крайней мере два педикулярных винта согласно первому аспекту изобретения и по крайней мере один соединительный элемент.
В частном случае по крайней мере один соединительный элемент может представлять собой опорный стержень, трубку, проволочную сетку, направляющий стержень или изогнутые направляющие шпильки.
Варианты выполнения изобретения, демонстрирующие его преимущества, особенности и детали изобретения будут описаны в зависимых пунктах, описании, примерах и чертежах.
Краткое описание чертежей
На фиг.1 показан вид сбоку варианта выполнения педикулярного винта 1 в соответствии с изобретением с введенным соединительным элементом 4;
На фиг.2 показан вид педикулярного винта 1 вдоль продольной оси соединительного элемента 4;
На фиг.3 показана головка 3 винта педикулярного винта 1 с вложенным шаровым элементом 6;
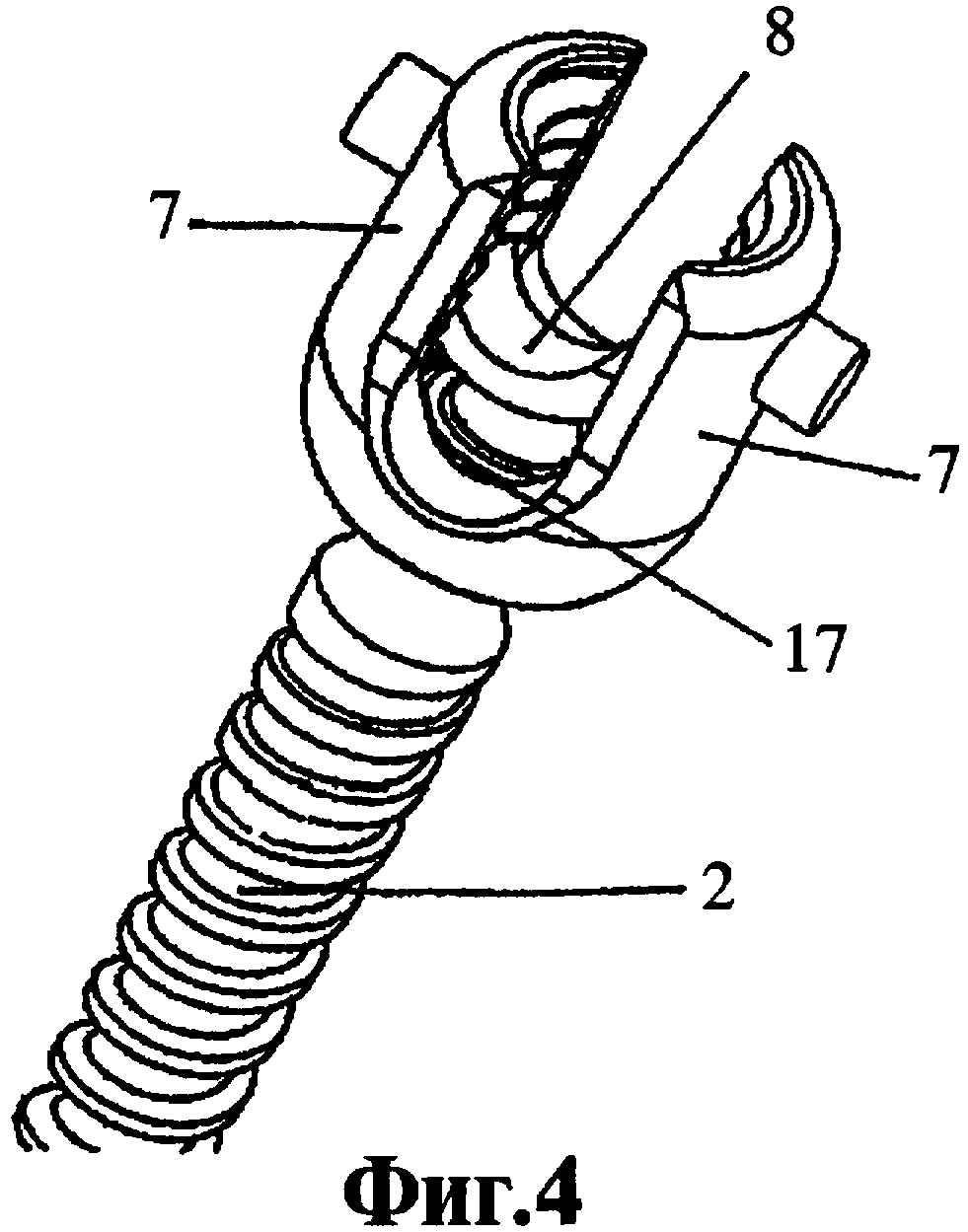
На фиг.4 показана головка 3 винта педикулярного винта 1 с вложенной нижней полусферой 8 в качестве части шарового элемента 6, а также одна из двух плоских сторон наконечника 17 хвостовика 2 винта;
На фиг.5 показана U-образная конструкция полой головки 3 педикулярного винта 1 с двумя стойками 7 на дне головки 3 винта, причем видно продолговатое углубление, две стороны которого параллельны друг другу (18с, 18d) для установки между ними сферического наконечника 17 хвостовика винта соответствующей конструкции;
На фиг.6 показана возможная конструкция верхней полусферы 9 в качестве части шарового элемента 6; конструкция нижней полусферы аналогична конструкции верхней полусферы, но не имеет выреза 10;
На фиг.7 показан вариант выполнения верхней полусферы 9 в качестве части шарового элемента 6, которая упирается в фиксатор 5;
На фиг.8 показан фиксатор 5 в виде резьбового штыря;
На фиг.9 показан хвостовик 2 винта со сферическим наконечником 17 и двумя плоскими параллельными поверхностями 18а и 18b;
На фиг.10 показан вариант выполнения устройства фиксации позвоночника в соответствии с изобретением.
Список обозначений
1 педикулярный винт
2 хвостовик винта
3 головка винта
4 соединительный элемент
5 фиксатор
6 шаровой элемент
7 стойка
8 нижняя полусфера
9 верхняя полусфера
10 вырез в верхней полусфере
11 направляющий штифт в фиксаторе
12 выемка для установки инструмента
13 выпуклая поверхность на дне головки винта
14 средство захвата для установки завинчивающего инструмента
15 опорная поверхность нижней полусферы 8
15а парциальная поверхность опорной поверхности нижней полусферы 8
15b парциальная поверхность опорной поверхности нижней полусферы 8
16 опорная поверхность верхней полусферы 9
16а парциальная поверхность опорной поверхности верхней полусферы 9
16b парциальная поверхность опорной поверхности верхней полусферы 9
17 сферический наконечник хвостовика 2 винта
18 параллельные поверхности сферического наконечника 17
18а параллельная поверхность А сферического наконечника 17
18b параллельная поверхность В сферического наконечника 17
18с параллельная поверхность А головки 3 винта
18d параллельная поверхность В головки 3 винта
Осуществление изобретения
Настоящее изобретение относится к педикулярному винту 1, содержащему хвостовик 2 и головку 3, имеющую два расположенных напротив друг друга продолговатых углубления в виде прорезей, отличающемуся тем, что шаровой элемент 6 с вырезом для введения соединительного элемента 4 закреплен так, что он может двигаться в головке 3. Благодаря этому положение шарового элемента 6 может быть отрегулировано так, чтобы установить соединительный элемент 4 в направлении изгибания вперед-назад, и шаровой элемент может надежно заблокировать упомянутый соединительный элемент после его фиксации.
Конструкция хвостовика 2 педикулярного винта 1 не критична для настоящего изобретения, и он может быть любой обычной формы. В предпочтительном варианте выполнения педикулярные винты делаются самонарезающими. В предпочтительном варианте выполнения хвостовик 2 имеет резьбу с постоянным наружным диаметром и конически расширяющимся внутренним стержнем.
Конструкция головки 3 педикулярного винта 1, а также конструкция сферического наконечника 17 хвостовика 2 винта, напротив, имеют решающее значение. Головка 3 винта полая внутри и в нее вставляется шаровой элемент 6, благодаря чему оказываются возможными вращательные движения вокруг поперечной оси в головке 3 винта проходящего насквозь соединительного элемента 4. Вращательное движение вокруг поперечной оси проходящего насквозь соединительного элемента 4 означает, что соединительный элемент 4 может перемещаться в направлении сгибания вперед-назад.
Для того чтобы проходящий насквозь соединительный элемент 4 мог перемещаться таким образом, головка 3 винта должна иметь два расположенных напротив друг друга продолговатых углубления в виде прорезей, внутри которых соединительный элемент 4 может свободно наклоняться или поворачиваться. Для этого в предпочтительном варианте выполнения головка 3 винта делается цилиндрической или овальной формы. Головка 3 педикулярного винта 1 занимает очень незначительный объем, поэтому имеется возможность завернуть его глубоко; кроме того, головка винта не имеет острых краев.
Оси относительных перемещений соединительного элемента 4 в незакрепленном состоянии определяются следующим образом. Ось, проходящая вдоль позвоночника, считается центральной осью. Ось вдоль направления сгибания вперед-назад перпендикулярна центральной оси и проходит через живот и спину пациента, а поперечная ось перпендикулярна центральной оси и одновременно перпендикулярна оси направления сгибания-разгибания.
Таким образом, вращение соединительного элемента 4 вокруг поперечной оси, проходящей через головку 3 винта, вызывает перемещение концов соединительного элемента в направлении сгибания-разгибания, а вращение вокруг центральной оси вызывает смещение в поперечном направлении продольной оси, проходящей через соединительный элемент 4.
Таким образом, шаровой элемент 6 позволяет перемещаться соединительному элементу 4 в незакрепленном состоянии в направлении сгибания-разгибания. Отсутствие подвижности головки 3 винта на хвостовике винта в направлении центральной оси важно с точки зрения передачи полного усилия от соединительного элемента 4 к педикулярному винту и телу позвонка. Такая подвижность возможна в многоосных винтах, которые не обеспечивают восстановление оптимального положения позвонков, что будет подробно показано далее.
Для того чтобы головка 3 винта на хвостовике 2 винта не могла перемещаться вдоль центральной оси, а могла перемещаться только в направлении поперечной оси, наконечник 17 хвостовика 2 винта выполнен не в виде шара, вокруг которого головка 3 винта могла бы поворачиваться на полные 360°. Наконечник 17 хвостовика 2 винта выполнен в виде шара, две противолежащие поверхности которого (18а и 18b) параллельны друг другу, а головка 3 винта имеет параллельные поверхности (18с и 18d), упирающиеся в поверхности 18а и 18b соответственно. Поверхности 18а и 18b имеют одинаковый размер. Поверхности 18с и 18d также одного размера, и все поверхности 18а, 18b, 18с и 18d параллельны друг другу. Таким образом, наклон головки 3 винта на хвостовике 2 винта возможен только в поперечном направлении, то есть вокруг центральной оси. Благодаря этому головка 3 винта, закрепленная на хвостовике 2 винта, может согласно изобретению наклоняться только в направлении поперечной оси, то есть в плоскости, образованной поперечной осью и осью наклона вперед-назад, при этом данная плоскость перпендикулярна центральной оси. Головка 3 винта, закрепленная на хвостовике 2 винта, не может, однако, свободно поворачиваться вокруг продольной оси хвостовика 2 винта.
Конструкция сферического наконечника 17, имеющего согласно изобретению форму шара с двумя противоположными параллельными поверхностями, обозначенными 18а и 18b, представлена на фиг.9. Эти поверхности 18а и 18b, упирающиеся в соответствующие параллельные поверхности 18с и 18d головки 3 винта, препятствуют вращению вокруг центральной оси и только разрешают отклонение до 45° (а лучше до 30°) от центрального положения в одно из поперечных направлений. Параллельные поверхности 18с и 18d хорошо видны на фиг.5.
Параллельные поверхности 18с и 18d расположены в самой нижней части головки 3 винта, обращенной к хвостовику 2 винта, как это показано на фиг.3. В этой области резьба в головке 3 винта отсутствует. Диаметр стержня хвостовика 2 винта меньше, чем расстояние между параллельными поверхностями 18с и 18d, поэтому хвостовик 2 винта может вводиться в нижнее отверстие головки 3 винта, пока не произойдет соприкосновение параллельных поверхностей 18а и 18с и 18b и 18d, а наконечник 17 винта не образует основание для опоры шарового элемента 6.
С одной стороны, это ограниченное перемещение имеет очень большое значение для восстановления оптимального положения позвонков, а с другой стороны, важно для прочного охвата соединительного элемента 4 с закреплением в фиксаторе 5. Педикулярные винты согласно изобретению удачно сочетают преимущества одноосного винта с преимуществами многоосного винта, в то же время не имея их недостатков. Педикулярный винт в соответствии с изобретением функционирует как одноосный винт при имплантации, то есть обеспечивает восстановление оптимального положения и обладает преимуществами многоосного винта при введении соединительного элемента, чем в значительной степени упрощает введение и фиксацию соединительного элемента, причем это достигается без ухудшения восстановительных свойств винта.
Нормальная форма травмированного позвоночника восстанавливается и поддерживается посредством фиксатора. Это достигается в ходе хирургической операции установкой педикулярного винта в ножку позвонка и восстановлением его оптимального положения посредством винта, используемого как рычаг. Такое восстановление соответствующего оптимального положения позвонка наилучшим образом достигается посредством одноосных винтов. Благодаря жесткости головки винта в одноосных винтах иногда бывает сложно полностью с обеспечением неподвижности его крепления охватить соединительный элемент 4, поэтому имплантацию требуется производить с очень высокой точностью. Если же головка винта установлена по многоосной схеме, имеется возможность приспособить положение головки винта к положению соединительного элемента 4 и прочно его закрепить. К сожалению, из-за подвижности головки винта невозможно установить позвонок оптимальным образом. Многоосные винты обычно прикрепляются к стержню с резьбой, то есть к хвостовику педикулярного винта, таким образом, что из-за сферичности держателя головки винта обладают подвижностью во всех направлениях.
Таким образом, многоосное крепление головки винта ограничивает возможность использования педикулярного винта как рычага для возвращения позвонков в оптимальное положение, поскольку усилие не передается на ось хвостовика педикулярного винта либо передается в недостаточной мере. Одноосные педикулярные винты обеспечивают передачу усилия, но к их недостаткам, например, относится очень трудоемкая и требующая большой точности работа по формированию стабилизирующего стержня (соединительного элемента 4). В зависимости от конкретных условий хирурги приблизительно в равной мере используют одноосные или многоосные системы.
Иногда одноосный винт не в состоянии прочно охватить соединительный элемент 4 после проведения фиксации и, кроме того, при имплантации требуется очень высокая точность, зато обеспечивает восстановление оптимального положения позвонка. Многоосный винт, напротив, обеспечивает прочное закрепление соединительного элемента 4, даже если имплантация отдельных педикулярных винтов была выполнена не столь точно, но не обеспечивает оптимального восстановления положения позвонка из-за остающейся после имплантации подвижности головки винта.
В вариантах выполнения в соответствии с изобретением достигается прочное охватывание или блокировка соединительного элемента 4 (стабилизирующего стержня) при фиксации посредством шарового элемента 6, представляющего собой шарообразный держатель для соединительного элемента 4, в котором при имплантации достигается необходимая подвижность, что обеспечивает большую простоту имплантации педикулярных винтов, поскольку не требуется очень высокая точность, но при этом достигается восстановление оптимального положения, характерное для одноосного винта, поскольку благодаря неподвижности головки винта, в частности, вдоль критической центральной оси усилие может быть полностью передано на ось хвостовика педикулярного винта.
В наиболее предпочтительном варианте выполнения настоящего изобретения головка 3 винта также закреплена на хвостовике 2 винта с возможностью перемещения, но не может двигаться во всех направлениях или поворачиваться на 360°, как в многоосных винтах. В соответствии с изобретением головка 3 винта устанавливается на хвостовик 2 винта, имеющего сферический наконечник 17 с плоскими сторонами 18а и 18b, благодаря чему головка 3 винта может поворачиваться только вокруг центральной оси (см. фиг.5, 9). Эта подвижность вместе с подвижностью шарового элемента 6 обеспечивает педикулярному винту, а вместе с ним всему устройству подвижность, необходимую для достижения прочной неподвижной опоры для соединительного элемента 4 в незафиксированном состоянии, причем эта подвижность сочетается с жесткостью, необходимой для восстановления оптимального положения позвонков.
К головке 3 педикулярного винта 1 может быть прикреплено средство 14 захвата в форме штифтов, изгибов, вырезов или выемок для установки инструмента для завинчивания или держателей.
Для упрощения введения шарового элемента 6 в головку 3 винта желательно, чтобы головка 3 имела вместо сквозного отверстия вдоль центральной оси углубление, открытое сверху. Кроме того, для упрощения установки и закрепления шарового элемента 6 желательно, чтобы головка 3 винта имела отверстие вдоль оси хвостовика 2 винта, внутренний диаметр которого в значительной мере соответствует наружному диаметру шарового элемента 6. Отверстие образует окно в головке 3 винта по ее центру со стороны, противоположной хвостовику 2 винта, которое приспособлено для введения фиксатора 5.
На фиг.5 представлена головка 3 педикулярного винта 1 с внутренним отверстием и U-образным углублением, которое после введения педикулярного винта 1 в тело позвонка должно проходить вдоль оси позвоночника, то есть вдоль центральной оси. В предпочтительных вариантах выполнения головка 3 винта имеет две полукруглые стойки 7, расположенные напротив друг друга, между которыми может быть закреплен шаровой элемент 6, через который проходит соединительный элемент 4. В одном из предпочтительных вариантов выполнения, головка 3 винта имеет на дне углубление с двумя полукруглыми противолежащими сторонами, параллельными друг другу. Сферический наконечник с двумя поверхностями, которые параллельны друг другу, вводится в это углубление таким образом, что возможен только наклон головки 3 винта на хвостовике 2 винта, а ее вращение невозможно.
Вместо шарового элемента 6 может использоваться любой элемент, поворачиваемый вокруг поперечной оси. Предпочтительным является использование сферических элементов, по оси которых проходит сквозное отверстие для введения в него соединительного элемента 4. Предпочтительным является применение шаровых элементов 6 из двух частей, содержащих, например, нижнюю полусферу 8, обращенную к хвостовику 2 винта, и верхнюю полусферу 9, обращенную к фиксатору. В предпочтительном варианте выполнения внутренний диаметр полусфер 8 и 9 равен наружному диаметру соединительного элемента 4. Более того, в предпочтительном варианте выполнения наружный диаметр полусфер 8 и 9 приближается к внутреннему диаметру отверстия в головке 3 винта в направлении продольной оси хвостовика 2 винта.
В другом предпочтительном варианте выполнения опорные поверхности 15 и 16 двух полусфер 8 и 9 не плоскопараллельны, а образуют угол.
На фиг.6 представлен возможный вариант выполнения верхней полусферы 9 с наклоненными опорными поверхностями 16 для опоры нижней полусферы 8. Две парциальные поверхности 16а и 16b опорной поверхности 16 составляют угол от 100° до 190°, в предпочтительном варианте выполнения - от 110° до 180°, а в наиболее предпочтительном варианте выполнения - от 115° до 175°. Нижняя полусфера 8 имеет такую же форму, что и верхняя полусфера 9, но у нее отсутствует вырез 10. Две парциальные поверхности 15а и 15b опорной поверхности 15 нижней полусферы 8 могут составлять угол от 100° до 190°, в предпочтительном варианте выполнения - от 110° до 180°, а в наиболее предпочтительном варианте выполнения - от 115° до 175°. В предпочтительном варианте выполнения нижняя полусфера упирается в сферический наконечник 17 хвостовика 2 винта.
Внутренние поверхности шарового элемента 6 или, соответственно, внутренние поверхности нижней полусферы 8, так же как и верхней полусферы 9, которые упираются в соединительный элемент 4, могут иметь шероховатую или неровную структуру для прочного захвата соединительного элемента 4 и для предотвращения продольных движений соединительного элемента 4 внутри шарового элемента 6 после имплантации.
В предпочтительных вариантах выполнения педикулярного винта 1 с отверстием в головке 3 винта в направлении продольной оси хвостовика 2 винта необходимо закреплять шаровой элемент 6 фиксатором 5. В качестве фиксатора могут быть использованы шпильки, болты, стержни, клинья или другие средства фиксации шарового элемента 6 внутри головки 3 винта. Особенно подходят для использования в качестве фиксатора 5 винты с резьбой и резьбовые штыри. Поэтому желательно, чтобы отверстие в головке 3 винта имело резьбу по крайней мере в своей верхней части. С помощью фиксатора 5 соединительный элемент 4 прочно и неподвижно охватывается и блокируется в шаровом элементе 6. После фиксации, в частности после затяжки, винтов с резьбой устройство в соответствии с изобретением закрепляется в таком положении, что элементы отдельных педикулярных винтов, до того обладавшие подвижностью, закрепляются жестко и неподвижно в соответствующих положениях. Подвижность устройства в этом положении обусловлена исключительно гибкостью соединительного элемента 4.
На фиг.8 представлен предпочтительный вариант выполнения фиксатора 5 в соответствии с изобретением в виде винта с резьбой или резьбового штыря, в головке которого имеется выемка 12 для установки завинчивающего инструмента. В проиллюстрированном варианте используется шестигранная выемка для шестигранного ключа. В предпочтительном варианте фиксатор 5 дополнительно имеет на конце направляющий штифт 11, который может перемещаться, скользя в соответствующем вырезе в шаровом элементе 6, который в предпочтительном варианте выполнения имеет вид верхней полусферы 9. На фиг.7 показано, каким образом верхняя полусфера 9 упирается в фиксатор 5 и каким образом направляющий штифт 11 на фиксаторе 5 входит в соответствующую прорезь в верхней полусфере 9.
На фиг.4 показана головка 3 винта с вставленной нижней полусферой 8. Для облегчения поворота нижней полусферы 8 вокруг поперечной оси желательно, чтобы нижняя полусфера 8 или шаровой элемент 6 опирались снизу по центру головки 3 винта на выпуклую поверхность 13. Поэтому желательно, чтобы со стороны, обращенной к хвостовику 2 винта, головка 3 винта имела симметричную относительно центра выпуклую поверхность 13, имеющую, в частности, форму полушария, которая служит точечной опорной поверхностью для шарового элемента или нижней полусферы 8. В наиболее предпочтительном варианте выполнения, где головка 3 винта может перемещаться в направлении поперечных осей, этой выпуклой поверхностью 13 служит сферический наконечник 17.
Головка 3 винта в соответствии с изобретением с вставленным шаровым элементом 6 в виде нижней полусферы 8 и верхней полусферы 9 показана на фиг.3. Цилиндрическое сквозное отверстие в шаровом элементе 6 продолжается двумя продолговатыми углублениями в виде прорези в головке 3 винта.
Когда соединительный элемент 4 вводится в сквозное отверстие в шаровом элементе 6, соединительный элемент 4 может двигаться вокруг поперечной оси в продолговатой прорези головки 3 винта, когда соединительный элемент 4 и, в результате, шаровой элемент 6 не закреплены в их соответствующих положениях фиксатора. Как только соединительный элемент 4, введенный в сквозное отверстие в шаровом элементе 6, закреплен, захвачен или зажат в головке 3 винта с помощью фиксатора 5, то, как ясно показано на фиг.2, соединительный элемент 4 не может больше перемещаться в продолговатой прорези головки 3 винта и прочно закреплен или зажат. В закрепленном состоянии уже невозможны вращение или поворот вокруг поперечной оси. То же самое относится к головке 3 винта, которая закреплена на хвостовике 2 винта с возможностью перемещения вдоль поперечной оси. Кроме того, смещения вдоль оси позвоночника, то есть центральной оси, в фиксированном, захваченном или зажатом состоянии оказываются невозможными.
В качестве материалов для изготовления педикулярных винтов согласно изобретению 1 могут быть использованы следующие: специальная медицинская сталь, титан или сплавы титана, тантал, хром, сплавы кобальта с хромом, ванадий, вольфрам, молибден, пластики, например PEEK (полиэфирэфиркетон), а также пластики, армированные волокном.
В качестве соединительных элементов могут быть использованы опорные стержни, трубки, проволочная сетка, направляющие стержни или направляющие шпильки. Также желательно, чтобы по крайней мере один соединительный элемент 4 обладал кривизной или гибкостью для адаптации к позвоночнику.
В качестве материалов для по крайней мере одного соединительного элемента 4 могут быть использованы следующие материалы: специальная медицинская сталь, титан или сплавы титана, тантал, хром, сплавы кобальта с хромом, ванадий, вольфрам, молибден, пластики, например PEEK (полиэфирэфиркетон), а также пластики, армированные волокном.
Желательно также, чтобы отдельные элементы педикулярного винта 1 в соответствии с изобретением или по крайней мере поверхности его соприкосновения имели керамическое покрытие. В предпочтительном варианте выполнения керамические покрытия включают нитриды, карбиды и фосфиды металлоидов и металлов или сплавов металлов. Примерами керамических покрытий могут служить нитриды бора, нитрид титана-ниобия, фосфид титана-кальция (Ti-Ca-P), Cr-Al-N, Ti-Al-N, Cr-N, TiAlN-CrN, Ti-Al-C, Cr-C, TiAlC-CrC, Zr-Hf-C-N, Si-C-N-Ti, Si-C-N, а также DLC (углерод со структурой алмаза). Кроме того, в предпочтительном варианте выполнения в качестве покрытия наносится керамический слой нитрида титана-ниобия (Ti-Nb-N).
Наиболее предпочтительным покрытием для соприкасающихся поверхностей отдельных компонентов является нитрид титана-ниобия (Ti-Nb-N). Керамическое покрытие из нитрида титана-ниобия обладает твердостью, значительно превышающей твердость обычно используемых материалов. Благодаря высокой твердости поверхность может быть хорошо отполирована и защищена от потери титана вследствие абразивного истирания.
Далее, настоящее изобретение относится к устройству фиксации позвоночника, состоящему из нескольких, по крайней мере двух, педикулярных винтов 1 согласно изобретению и по крайней мере одного соединительного элемента 4.
Устройство для обеспечения устойчивости позвоночника в соответствии с изобретением не только может быть использовано для обеспечения устойчивости двух смежных позвонков, между которыми находится межпозвонковый диск, но также может быть соединено с несколькими позвонками для поддержки значительных участков позвоночника.
Обычно соединяются по крайней мере два педикулярных винта, которые соединены соединительным элементом 4, то есть стабилизирующим стержнем. Таким образом, позвоночник стабилизируется (при необходимости с коррекцией) внешними элементами. Травмированные или дегенеративно измененные позвонки возвращаются в оптимальное положение и удерживаются в правильном пространственном положении фиксатором позвоночника. Помимо присущей соединительному элементу 4 (стабилизирующий стержень) гибкости, травмированная (или дегенеративно измененная) часть позвоночника в значительной мере фиксируется, поэтому позвоночник в целом может служить опорой даже при наличии у него поврежденных частей. При этом поврежденные части разгружаются и не возникает повторного смещения.
Примеры выполнения изобретения
Ниже будут представлены предпочтительные варианты выполнения педикулярного винта или устройства в соответствии с изобретением с использованием примеров, из чего будет понятно, что описанные примеры демонстрируют предпочтительные варианты выполнения изобретения, однако область патентных притязаний изобретения не должна сводиться к этим вариантам выполнения.
Пример 1
Используется педикулярный винт 1 общей диной 25-60 мм. Педикулярный винт 1 выполнен из титана. Длина хвостовика 2 винта составляет 15-45 мм в соответствии с длиной педикулярного винта, а его наружный диаметр составляет 13-15 мм. Головка 3 винта имеет наружный диаметр 17-20 мм.
Головка 3 винта имеет овальную форму и по ее центру высверлено отверстие глубиной 10-13 мм в направлении продольной оси хвостовика 2 винта, причем упомянутое отверстие выполнено в виде резьбового отверстия в верхней части головки 3 винта. Внутренний диаметр упомянутого отверстия составляет 6-8 мм.
Сферический наконечник 17 хвостовика 2 винта по форме не является полным шаром, а представляет собой шар с двумя параллельными противоположными поверхностями (18а, 18b), которые согласуются с соответствующими поверхностями 18с и 18а головки 3 винта и определяют ее подвижность либо ограничивают ее свободное вращение. Параллельные противоположные поверхности 18а, а также 18b имеют, соответственно, поверхность приблизительно 0,7 см2.
В головке 3 винта также вырезано сквозное отверстие, открытое сверху и имеющее продолговатую форму, которое скруглено у дна головки 3 винта с диаметром скругления, приблизительно соответствующим диаметру соединительного элемента 4, который должен в него вставляться.
На дне головки 3 винта имеется выпуклая сферическая поверхность 13, на которую опирается нижняя полусфера 8. Внутренние диаметры нижней полусферы 8, так же как и верхней полусферы 9, приблизительно соответствуют наружному диаметру вводимого соединительного элемента 4.
Верхняя полусфера 9 помещается на нижнюю полусферу 8, при этом опорные поверхности 15а, 15b или, соответственно, 16а, 16b обеих полусфер образуют угол 150°.
В верхней полусфере 9 сделан продолговатый вырез 10 вдоль центральной оси, в который вставляется направляющий штифт 11 фиксатора 5. Направляющий штифт 11 имеет длину 1-3 мм и наружный диаметр 0,5-2 мм.
На верхнюю полусферу 9 устанавливается фиксатор 5 в виде резьбового штыря. Направляющий штифт 11 расположен на нижней части резьбовой штыря, а в его верхней части сделана выемка для введения инструмента для вращения штыря.
Резьбовой штырь имеет резьбу, соответствующую резьбовому отверстию в головке 3 винта, и может вворачиваться в головку 3 винта до тех пор, пока она надежно не зажмет соединительный элемент 4 между верхней полусферой 9 и нижней полусферой 8.
В качестве соединительного элемента 4 используется гибкая трубка из специальной медицинской стали, титана, сплавов титана или тантала, длина которой может варьироваться от 4 см до 30 см, а наружный диаметр составляет 3-8 мм.
Соединительный элемент 4 не может перемещаться вдоль оси спинного мозга, но, пока он не закреплен, может поворачиваться вокруг поперечной оси на угол до 12 градусов, а в предпочтительном варианте - до 24 градусов, начиная от горизонтального положения, которое перпендикулярно продольной оси хвостовика винта.
В предпочтительном варианте выполнения отдельные компоненты педикулярного винта 1 имеют керамическое покрытие.
Пример 2
Используется педикулярный винт 1 с полной длиной 45 мм. Педикулярный винт 1 выполнен из тантала. Хвостовик 2 винта имеет длину 35 мм, соответствующую длине педикулярного винта, и наружный диаметр около 14 мм. Головка 3 винта имеет наружный диаметр около 18 мм.
Головка 3 винта имеет овальную форму и по ее центру высверлено отверстие глубиной 12 мм в направлении продольной оси хвостовика 2 винта, причем упомянутое отверстие выполнено в виде резьбового отверстия в верхней части головки 3 винта. Внутренний диаметр упомянутого отверстия составляет около 7 мм.
Сферический наконечник 17 хвостовика 2 винта по форме не является полным шаром, а представляет собой шар с двумя параллельными противоположными поверхностями (18а, 18b), которые согласуются с соответствующими поверхностями 18с и 18d головки 3 винта и определяют ее подвижность либо ограничивают ее свободное вращение. Параллельные противоположные поверхности 18а, а также 18b имеют соответственно поверхность площадью около 0,55 см2.
В головке 3 винта также вырезано сквозное отверстие, открытое сверху и имеющее продолговатую форму, которое скруглено у дна головки 3 винта с диаметром скругления, приблизительно соответствующим диаметру соединительного элемента 4, который должен в него вставляться.
У хвостовика 2 винта имеется сферический наконечник 17, причем сферический наконечник 17 имеет две противолежащие параллельные поверхности 18а и 18b. У головки 3 винта имеется соответствующее углубление, в которое вводится сферический наконечник 17, опираясь на который, она может перемещаться в поперечном направлении на хвостовике 2 винта. Головка 3 винта может наклоняться в поперечном направлении на угол до 30 градусов от центрального положения. Таким образом, дно головки 3 винта образовано сферическим наконечником 17, на который опирается нижняя полусфера 8. Внутренний диаметр нижней полусферы 8, так же как и верхней полусферы 9, приблизительно соответствует наружному диаметру соединительного элемента 4, который должен в них вводиться.
Верхняя полусфера 9 помещается на нижнюю полусферу 8, при этом опорные поверхности 15а, 15b или соответственно 16а, 16b обеих полусфер образуют угол 140°.
В верхней полусфере 9 сделан продолговатый вырез 10 вдоль центральной оси, в который вставляется направляющий штифт 11 фиксатора 5. Направляющий штифт 11 имеет длину 1-3 мм и наружный диаметр 0,5-2 мм.
На верхнюю полусферу 9 устанавливается фиксатор 5 в виде резьбовой втулки. Направляющий штифт 11 расположен на нижней части резьбового штыря, а в его верхней части сделана выемка для введения инструмента для вращения штыря.
Резьбовой штырь имеет резьбу, соответствующую резьбовому отверстию в головке 3 винта, и может вворачиваться в головку 3 винта до тех пор, пока она надежно не зажмет соединительный элемент 4 между верхней полусферой 9 и нижней полусферой 8.
В качестве соединительного элемента 4 используется гибкая трубка из специальной медицинской стали длиной 25 мм и наружным диаметром 6 мм.
Соединительный элемент 4 не может перемещаться вдоль оси позвоночника, но, пока он не закреплен, может поворачиваться вокруг поперечной оси на угол до 12 градусов, а в предпочтительном варианте - до 24 градусов, начиная от горизонтального положения, которое перпендикулярно продольной оси хвостовика винта.
В предпочтительном варианте выполнения отдельные компоненты педикулярного винта 1 имеют керамическое покрытие.
Пример 3
Устройство для обеспечения устойчивости позвоночника в соответствии с изобретением состоит из пяти педикулярных винтов 1 и одного соединительного элемента 4 общей длиной 13 см.
Общее число позвонков, над которыми может быть закреплено это устройство, равно 5.
Реферат
Группа изобретений относится к медицине. Педикулярный винт содержит хвостовик винта со сферическим наконечником, головку винта, имеющую два расположенных друг против друга углубления. Сферический наконечник имеет две расположенные друг против друга параллельные поверхности (18а, 18b), прилегающие к соответствующим параллельным поверхностям (18с, 18d) головки винта, а продольная ось проходит через два расположенных друг против друга углубления головки винта перпендикулярно параллельным плоскостям (18с, 18d) головки винта. Устройство фиксации позвоночника содержит по крайней мере два вышеуказанных педикулярных винта (1) и по крайней мере один соединительный элемент (4). Изобретения обеспечивают сочетание преимуществ одноосного винта с преимуществами многоосного винта, не имея недостатков, присущих винтам этих типов, а именно возможность плотно охватывать соединительный элемент, а с другой стороны, обеспечивать восстановление оптимального положения позвонков. 2 н. и 9 з.п. ф-лы, 10 ил.
Комментарии