Хирургическое устройство для коррекции деформаций позвоночника - RU2526425C2
Код документа: RU2526425C2
Чертежи










Описание
Настоящее изобретение относится в основном к хирургическому устройству для коррекции деформаций позвоночного столба и имеет особую полезность, не ограничиваясь, однако, данным применением, в устройствах, имплантируемых хирургическим путем.
В настоящее время хирургическая коррекция деформаций позвоночного столба включает в себя хирургическое вмешательство для внедрения имплантируемых фиксирующих устройств, таких как винты на ножках или крюки, к каждому позвонку с последующим применением внешних сил для достижения желаемой коррекции формы позвоночного столба и прикреплением указанных фиксирующих устройств к жестким стержневидным элементам для достижения постоянной стабилизации задействованной части позвоночного столба. Также добавляется костный трансплантат для достижения постоянного сращения той же части позвоночного столба.
Предыдущие устройства для коррекции деформаций позвоночника включали фиксацию костных винтов, которые присоединялись к стержням с помощью вращающихся соединений, например, как описано в WO-A2-2007/014119. Также использование храповых механизмов с позвоночными имплантатами известно из WO-A2-2008/057861, WO 2007/143709 и ЕР-А2-1051947. Хотя эти конструкции увеличивают универсальность и легкость применения имплантатов, использующихся для фиксации позвоночника, применение всех использующихся на данный момент имплантатов и способов хирургической коррекции деформаций позвоночного столба обусловлено величиной коррекции деформации, достигнутой в ходе хирургического вмешательства, которая часто ограничена. Кроме того, в ходе применения всех современных имплантатов и способов хирургической коррекции деформаций позвоночного столба полная коррекция достигается в ходе хирургического вмешательства и после этого становится невозможным дальнейшая степень коррекции, так как задействованная часть позвоночного столба становится постоянно сращенной. Последствиями этого являются необратимая потеря подвижности позвоночника и последующее увеличение механических нагрузок на прилегающие подвижные сегменты позвоночника, что часто приводит к изнашиванию этих сегментов.
Одно устройство, описанное в US-A 1-2005/0261770, имеет различные конструкции для соединения позвоночных опор, включая вращающиеся и скользящие приспособления между компонентами, для того чтобы избежать сращения и необратимой потери подвижности позвоночного столба. Тем не менее, подобные имплантаты не могут использоваться в качестве устройств для коррекции деформации позвоночника, так как не имеется механизма настройки относительного положения позвонков.
Другие устройства описаны в US-A 1-2006/155279, ЕР-А 1-0667127, US-A1-2003/191470, US 5,951,555, US 5,672,175 и GB 2412320, которые включают пружины, гибкие стержни или другие механизмы формирования сил, такие как сплавы с памятью формы, для предотвращения развития деформации или даже для постепенной коррекции деформации позвоночного столба. Хотя подобные раскрытые устройства могут способствовать развитию коррекционных сил между частями позвоночного столба, большинство из них являются пассивными и неспособными обеспечить постепенную коррекцию деформаций позвоночника, с сохранением активных движений человеческого тела. Настоящее изобретение решает эту проблему.
В первом аспекте изобретение предоставляет хирургическое устройство для коррекции деформаций позвоночного столба, включающее в себя механизм для выпрямления позвоночного столба, позволяющий осуществлять относительное вращение двух по существу смежных позвонков вокруг общей оси, по существу только в противоположных направлениях вращения.
Хирургическое устройство может быть расположено таким образом, что при использовании передние края концевых пластинок двух по существу смежных позвонков по существу могут лишь сближаться друг с другом либо отдаляться друг от друга. Соответственно, задние края концевых пластинок двух по существу смежных позвонков по существу могут лишь отдаляться друг от друга либо сближаться друг с другом.
Термин "по существу" используется здесь во фразе "по существу могут лишь сближаться друг с другом либо отдаляться друг от друга", так как предполагается, что в устройстве может присутствовать элемент "люфта", так что может происходить незначительное относительное движение в противоположном направлении.
Таким образом, данное устройство, которое может крепиться к задним поверхностям позвонков, допускает один из двух режимов работы. Первый режим - когда допускается увеличение интервала между смежными позвонками по направлению к их передним поверхностям и/или уменьшение интервала по направлению к их задним поверхностям, таким образом, выпрямляя позвоночник, который искривлен вперед. Второй режим - когда допускается уменьшение интервала между смежными позвонками по направлению к их передним поверхностям и/или увеличение их интервала по направлению к их задним поверхностям, таким образом, выпрямляя позвоночник, который искривлен назад. Кроме того, из-за того, что устройство по существу предотвращает вращение позвонков в противоположном направлении (при любом выбранном режиме работы), устройство предотвращает усугубление искривления позвоночника или возврат в прежнюю искривленную форму после выпрямления. Кроме того, когда пациент вытягивается вверх, таким образом, временно выпрямляя позвоночник, устройство позволяет смежным позвонкам выпрямляться относительно друг друга, но будет предотвращать их возврат в предыдущую искривленную форму.
Со временем искривленный позвоночник пациента может быть скорректирован так, что будет больше походить на обычный "прямой" позвоночник. Термин "по существу" используется во фразе "только в противоположных направлениях вращения", так как предполагается, что в устройстве может присутствовать элемент" люфта", так что смежные позвонки могут вращаться в одинаковом направлении. Тем не менее, величина этого вращательного движения в одинаковом направлении может быть незначительной по сравнению с вращательным движением в противоположном направлении, связанным с обычными повседневными занятиями пациента.
Хирургическое устройство может включать механизм вращения для разрешения относительного вращения двух указанных по существу смежных позвонков. Данное относительное вращение может выполняться вокруг общей оси. При этом общая ось может быть расположена в позвоночном столбе. Механизм вращения может включать храповой механизм. Данный храповой механизм может разрешать относительное вращение двух по существу смежных позвонков вокруг общей оси по существу лишь в противоположных направлениях вращения. Храповой механизм может включать в себя хорошо известные элементы, такие как собачку и зубцы.
Общая ось при использовании может быть по существу перпендикулярной длине позвоночного столба. Данная ось может лежать по существу параллельно пересечению фронтальной и поперечной плоскости тела.
Хирургическое устройство может включать соединительный механизм для соединения с двумя фиксирующими кость элементами, каждый из элементов крепится при использовании к каждому указанному смежному позвонку.
Элементы, фиксирующие кость, могут включать в себя по существу параллельные продольные оси, так что при использовании продольные оси по существу параллельны пересечению срединной сагиттальной плоскости и поперечной плоскости тела.
Общая ось при использовании может быть по существу перпендикулярной указанным продольным осям или пересечению срединной сагиттальной плоскости и поперечной плоскости тела.
Кроме того, хирургическое устройство может включать в себя механизм вращения для разрешения при использовании относительного вращения двух указанных смежных позвонков вокруг оси, по существу параллельной продольным осям элемента, фиксирующего кость, или пересечению срединной сагиттальной плоскости и поперечной плоскости тела.
Соединительный механизм может включать в себя первый охватываемый элемент и первый охватывающий элемент.
Один из двух указанных элементов, фиксирующих кость, может включать в себя второй охватывающий элемент, и первый охватываемый элемент может соединяться с данным вторым охватывающим элементом.
Первый охватываемый элемент может соединяться с возможностью вращения и/или скольжения со вторым охватывающим элементом.
Первый охватывающий элемент может соединяться с элементом, фиксирующим кость в смежном позвонке.
Первый охватывающий элемент может соединяться с возможностью вращения и/или скольжения с элементом, фиксирующим кость.
Любой или оба, первый и второй охватывающие элементы могут включать шарнирный механизм для разрешения или ограничения относительного углового движения любого соединенного первого охватываемого элемента или элемента, фиксирующего кость.
Хирургическое устройство может включать один или более элементов, фиксирующих кость.
Хирургическое устройство может включать, по меньшей мере, один элемент, фиксирующий кость, который крепится при использовании к первому позвонку.
Хирургическое устройство может включать альтернативный соединительный механизм для соединения с другим элементом, фиксирующим кость, который крепится при использовании ко второму смежному позвонку.
Альтернативный соединительный механизм может включать в себя первый альтернативный охватывающий элемент и первый альтернативный охватываемый элемент.
Первый альтернативный охватывающий элемент может соединяться с первым альтернативным охватываемым элементом смежного устройства.
Первый альтернативный охватывающий элемент может соединяться с возможностью вращения и/или скольжения с первым альтернативным охватываемым элементом смежного устройства.
Первый альтернативный охватывающий элемент может включать шарнирный механизм для разрешения или ограничения относительного углового движения любого соединенного альтернативного охватываемого элемента или элемента, фиксирующего кость.
Первый альтернативный охватывающий элемент и первый альтернативный охватываемый элемент могут находиться на противоположных сторонах храпового механизма.
Хирургическое устройство может включать механизм для прямого или непрямого соединения с подобным смежным устройством. При прямом соединении один из охватываемых элементов может помещаться в один из охватывающих элементов. При непрямом соединении между ними может быть помещен другой промежуточный элемент. Данный промежуточный элемент может включать в себя один или более охватываемых элементов и один или более охватывающих элементов, хотя подразумеваются и другие механизмы взаимного соединения. Промежуточный элемент может быть стержнем.
Во втором аспекте изобретение предоставляет хирургическое устройство для коррекции деформаций позвоночного столба, включающее в себя, по меньшей мере, два взаимно соединяющихся сегмента, приспособленных для крепления, по меньшей мере, на двух отдельных позвонках позвоночного столба, причем каждый сегмент включает в себя первую часть, оснащенную, по меньшей мере, одним фиксирующим кость элементом, приспособленную для крепления на, по меньшей мере, одном позвонке позвоночного столба, вторую часть, соединяемую с указанной первой частью осевым соединением, обеспечивающим вращение указанной первой и второй части относительно друг друга вокруг первой оси, причем указанная вторая часть также оснащена, по меньшей мере, одним штифтом, способным выдерживать механические нагрузки при использовании, и указанная вторая часть также оснащена, по меньшей мере, одним соединительным отверстием с конструкцией, подходящей, во-первых, для обеспечения внедрения указанного штифта, по меньшей мере, одного другого сегмента хирургического устройства, раскрытого в данной заявке, в указанное соединительное отверстие и, во-вторых, для обеспечения вращения вокруг оси (углового движения) и скольжения по оси указанного штифта в указанном соединительном отверстии, и конструкцию храпового механизма указанного осевого соединения между указанной первой и второй частью, разрешающую при использовании вращение указанной первой и второй части относительно друг друга вокруг указанной первой оси вращения в единственном предопределенном направлении, но ограничивающую вращение указанной первой и второй части вокруг указанной первой оси вращения в противоположном направлении, в котором при использовании, по меньшей мере, два взаимно соединенных сегмента хирургического устройства, раскрытого в данной заявке, закреплены на, по меньшей мере, двух отдельных позвонках позвоночного столба, и указанный штифт указанной второй части сегмента, закрепленного на позвонке сверху, внедренный по оси в указанное соединительное отверстие указанной второй части сегмента, закрепленного на позвонке снизу, разрешающий угловые движения между указанными двумя позвонками позвоночного столба в желаемом направлении коррекции деформации, но ограничивающий любое угловое движение между указанными двумя позвонками позвоночного столба в направлении, противоположном указанному желаемому направлению, причем при нормальной повседневной деятельности или особых движениях позвоночного столба человека, связанных с упражнениями, любые нагрузки на позвоночный столб в направлении, противоположном указанному желаемому направлению коррекции указанной деформации позвоночника, выдерживаются и предотвращаются, по меньшей мере, двумя взаимно соединенными сегментами хирургического устройства, раскрытого в данной заявке, в то время как все другие нагрузки выдерживаются исключительно позвоночным столбом, защищая, таким образом, хирургическое устройство, раскрытое в данной заявке, от механической поломки или ослабления его надежного крепления к позвонкам позвоночного столба, и, таким образом, через некоторое время можно достичь постепенной коррекции указанной деформации позвоночника без дополнительных механизмов формирования сил.
Как описано в данной заявке, предложено хирургическое устройство для постепенной коррекции деформаций позвоночного столба без сращения задействованной части позвоночного столба. Устройство может включать в себя взаимно соединенные сегменты, которые крепятся к отдельным позвонкам позвоночного столба. Их конструкция может включать в себя храповой механизм как часть шарнирного соединения между частью, прикрепленной к кости, и опорой. Опора может иметь соединительное отверстие для разрешения свободного относительного вращения и осевого движения, но которая может ограничивать относительное угловое движение, по меньшей мере, в одной плоскости, между взаимно соединенных сегментов. Конфигурация хирургического устройства может обеспечивать постепенную угловую коррекцию относительного расположения позвонков и одновременно позволять все другие движения, включая те, на которые влияет осевая нагрузка позвоночного столба. Следует оценить, что постепенная коррекция деформации позвоночного столба может быть достигнута через некоторое время после применения хирургического устройства вследствие активных и пассивных движений позвоночного столба в ходе обычных повседневных занятий и упражнений, тогда как в то же время может быть сохранена подвижность всех частей позвоночного столба.
Элементы, фиксирующие кость, описанные и/или заявленные в данной заявке, могут быть разновидностями винтов на ножках.
Вышеуказанные и иные характеристики, особенности и преимущества настоящего изобретения станут очевидны из нижеприведенного подробного описания в сочетании с сопроводительными чертежами, которые изображают на примерах принципы работы изобретения. Данное описание приведено лишь для примера, не ограничивая объем изобретения. Приведенные ниже ссылки на фигуры относятся к приложенным графическим материалам.
Фиг.1 является общим видом устройства согласно первому варианту воплощения изобретения;
Фиг.2 является общим видом двух устройств, изображенных на Фиг.1, при использовании с позвонками;
Фиг.3 является видом сбоку в поперечном сечении нескольких устройств согласно второму варианту воплощения изобретения при использовании с несколькими смежными позвонками;
Фиг.4 является общим видом устройства согласно третьему варианту воплощения изобретения;
Фиг.5 является общим видом устройства согласно четвертому варианту воплощения изобретения;
Фиг.6 является общим видом крупным планом устройства, изображенного на Фиг.5;
Фиг.7 является общим видом двух устройств, изображенных на Фиг.5, при использовании с двумя позвонками;
Фиг.8 является общим видом крупным планом двух устройств, изображенных на Фиг.7;
Фиг.9 является общим видом устройства согласно пятому варианту воплощения изобретения;
Фиг.10 является общим видом устройства согласно шестому варианту воплощения изобретения;
Фиг.11 является общим видом устройства согласно седьмому варианту воплощения изобретения;
Фиг.12 является общим видом устройства, изображенного на Фиг.11 ,с альтернативной особенностью;
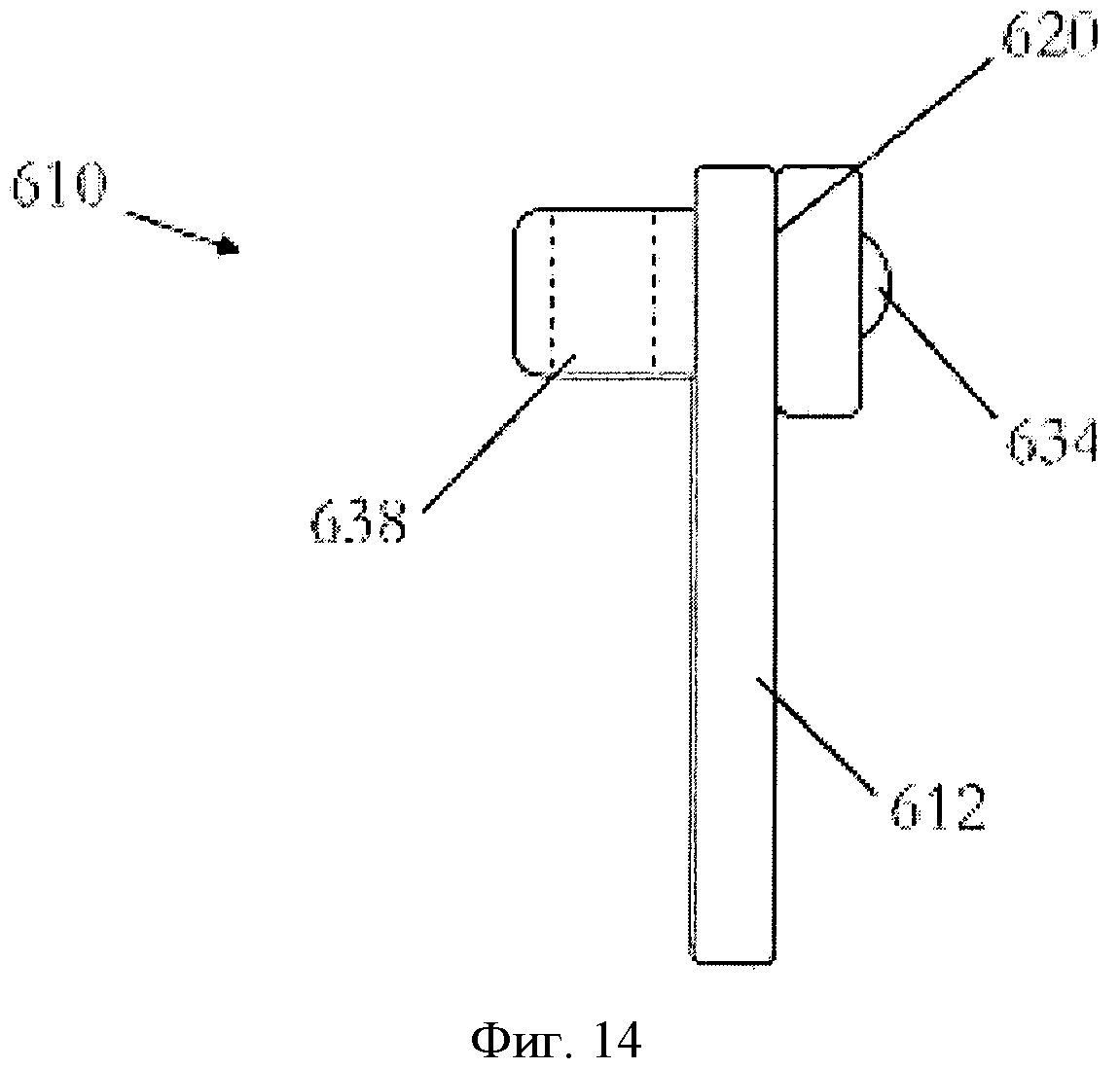
Фиг.13 является общим видом устройства согласно восьмому варианту воплощения изобретения;
Фиг.14 является видом сзади в вертикальной проекции устройства, изображенного на Фиг.13;
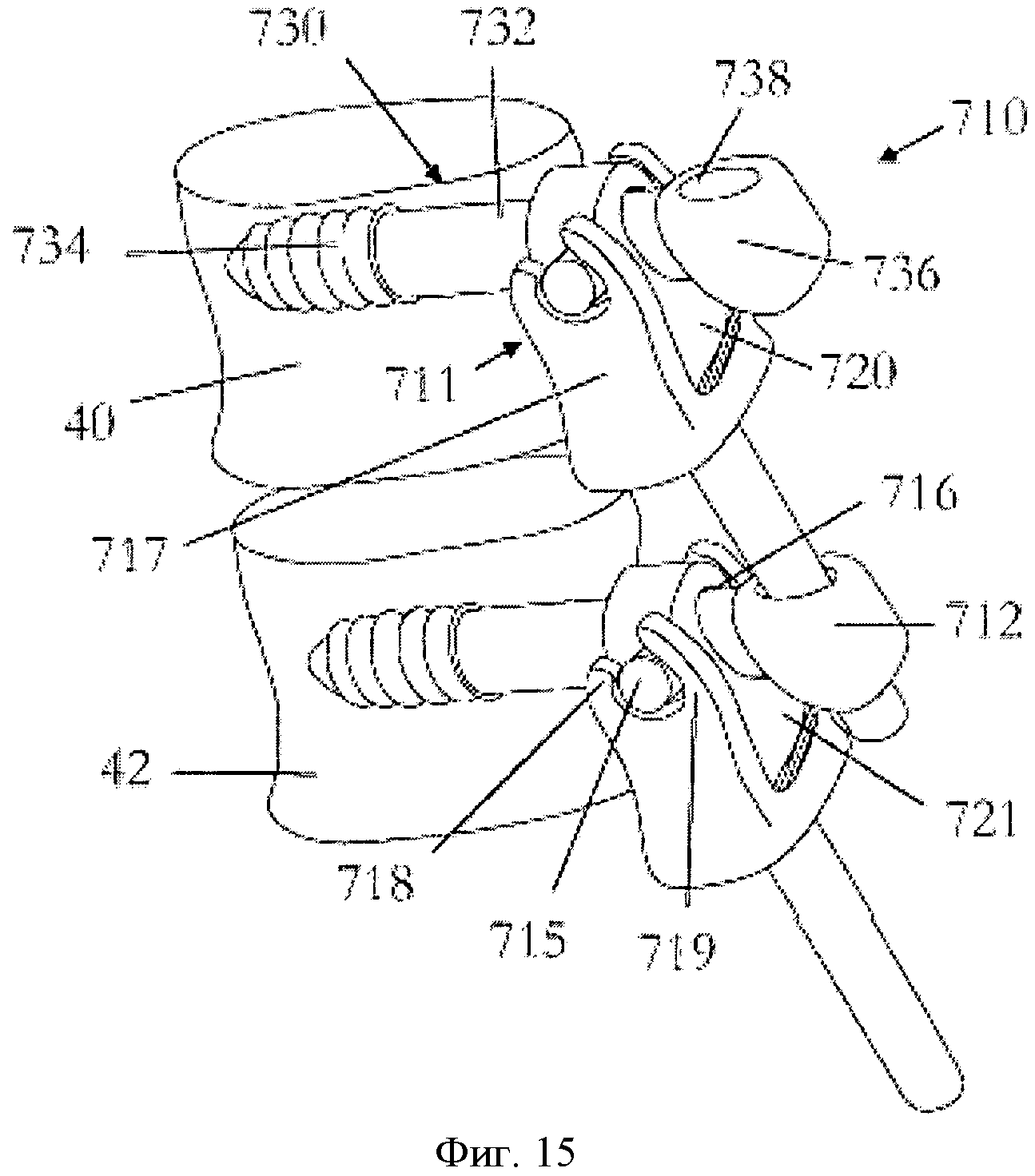
Фиг.15 является общим видом устройства согласно девятому варианту воплощения изобретения; и
Фиг.16 является общим видом устройства согласно десятому варианту воплощения изобретения.
Настоящее изобретение будет описано с учетом определенных вариантов воплощения и со ссылкой на определенные графические материалы, но данное изобретение не ограничено ими, а ограничено лишь формулой изобретения. Описанные графические материалы являются только схематическими и неограничивающими. На графических материалах размер некоторых элементов может быть преувеличен и изображен не в масштабе в качестве иллюстрации.
Размеры и относительные размеры не соответствуют действительному внедрению в практику изобретения.
Кроме того, термины "первый", "второй", "третий" и подобные в описании и формуле изобретения используются для отличия подобных элементов и не обязательно для описания последовательности относительно времени, пространства, очередности или любым другим способом. Следует понимать, что термины, используемые данным образом, являются взаимозаменяемыми при определенных обстоятельствах и что варианты воплощения изобретения, описанные в настоящей заявке, способны функционировать в последовательности, отличной от той, которая описана или изображена в настоящей заявке.
Более того, термины "верхний", "нижний", "над", "под" и подобные в описании и формуле изобретения используются в целях описания и не обязательно для описания относительного расположения. Следует понимать, что термины, используемые данным образом, являются взаимозаменяемыми при определенных обстоятельствах и что варианты воплощения изобретения, описанные в настоящей заявке, способны функционировать в ориентации, отличной от той, которая описана или изображена в настоящей заявке.
Следует отметить, что термин "включающий", использующийся в формуле изобретения не должен быть интерпретирован как ограниченный механизмами, описанными в дальнейшем; он не исключает других элементов или этапов. Таким образом, он должен интерпретироваться как определяющий наличие заявленных особенностей, целых объектов, этапов или компонентов согласно изложенному, но не исключает наличие или добавление одной или нескольких иных особенностей, целых объектов, этапов или компонентов или их групп. Таким образом, объем выражения "устройство, включающее механизмы А и В" не должен ограничиваться устройствами, состоящими только из компонентов А и В. Это означает, что единственными компонентами устройства, имеющими отношение к настоящему изобретению, являются А и В.
Подобным образом, следует отметить, что термин "соединенный", использующийся в описании, не должен быть интерпретирован как ограниченный прямыми соединениями. "Соединенный" может означать, что два или более элементов находятся либо в прямом физическом контакте, или что два или более элементов не находятся в прямом контакте друг с другом, но по-прежнему объединяются или взаимодействуют друг с другом.
Ссылка на "один вариант воплощения" или "вариант воплощения" на протяжении данной характеристики означает, что определенная особенность, структура или характеристика, описанная в сочетании с вариантом воплощения, включена, по меньшей мере, в один вариант воплощения настоящего изобретения. Таким образом, появление фраз "в одном варианте воплощения" или "в варианте воплощения" на протяжении данной характеристики не обязательно значит, что они все относятся к одному и тому же варианту воплощения, но могут относиться к различным вариантам воплощения. Кроме того, определенные особенности, структуры или характеристики могут комбинироваться любым подходящим образом, как очевидно среднему специалисту в данной области из данного описания, в одном или более вариантах воплощения.
Подобным образом, следует оценить, что в описании примеров вариантов воплощения изобретения различные особенности изобретения иногда объединены в одном варианте воплощения, фигуре или его описании с целью упрощения изложения сути и способствования пониманию одного или более различных аспектов изобретения. Данный способ изложения сути изобретения, тем не менее, не должен быть интерпретирован как отражающий замысел, что заявленное изобретение требует больше особенностей, чем в явной форме заявлено в каждом пункте. Точнее, как отражает следующая формула изобретения, аспекты изобретения заключаются в менее чем всех особенностях одного варианта воплощения, изложенного ранее. Таким образом, формула изобретения, следующая за подробным описанием, в явной форме включена в данное подробное описание, где каждый пункт является самостоятельным в качестве отдельного варианта воплощения данного изобретения.
Кроме того, в то время, как некоторые варианты воплощения, описанные в данной заявке, включают одни, а не иные особенности, включенные в других вариантах воплощения, подразумевается, что комбинации особенностей различных вариантов воплощения должны находиться в пределах объема изобретения и образовывать другие варианты воплощения, как может понять средний специалист в данной области. Например, в формуле изобретения, приведенной ниже, любой из заявленных вариантов воплощения может быть использован в любой комбинации.
В приведенном здесь описании изложены многочисленные характерные детали. Тем не менее, подразумевается, что варианты воплощения изобретения могут применяться на практике без этих характерных деталей. В других случаях хорошо известные способы, структуры и техники, не были подробно изображены для того, чтобы не мешать пониманию данного описания.
Изобретение сейчас будет описано путем подробного описания нескольких вариантов воплощения изобретения. Ясно, что другие варианты воплощения изобретения могут быть созданы согласно знаниям средних специалистов в данной области, не выходя за пределы духа и технической идеи изобретения, изобретение ограничивается лишь терминами приложенной формулы изобретения.
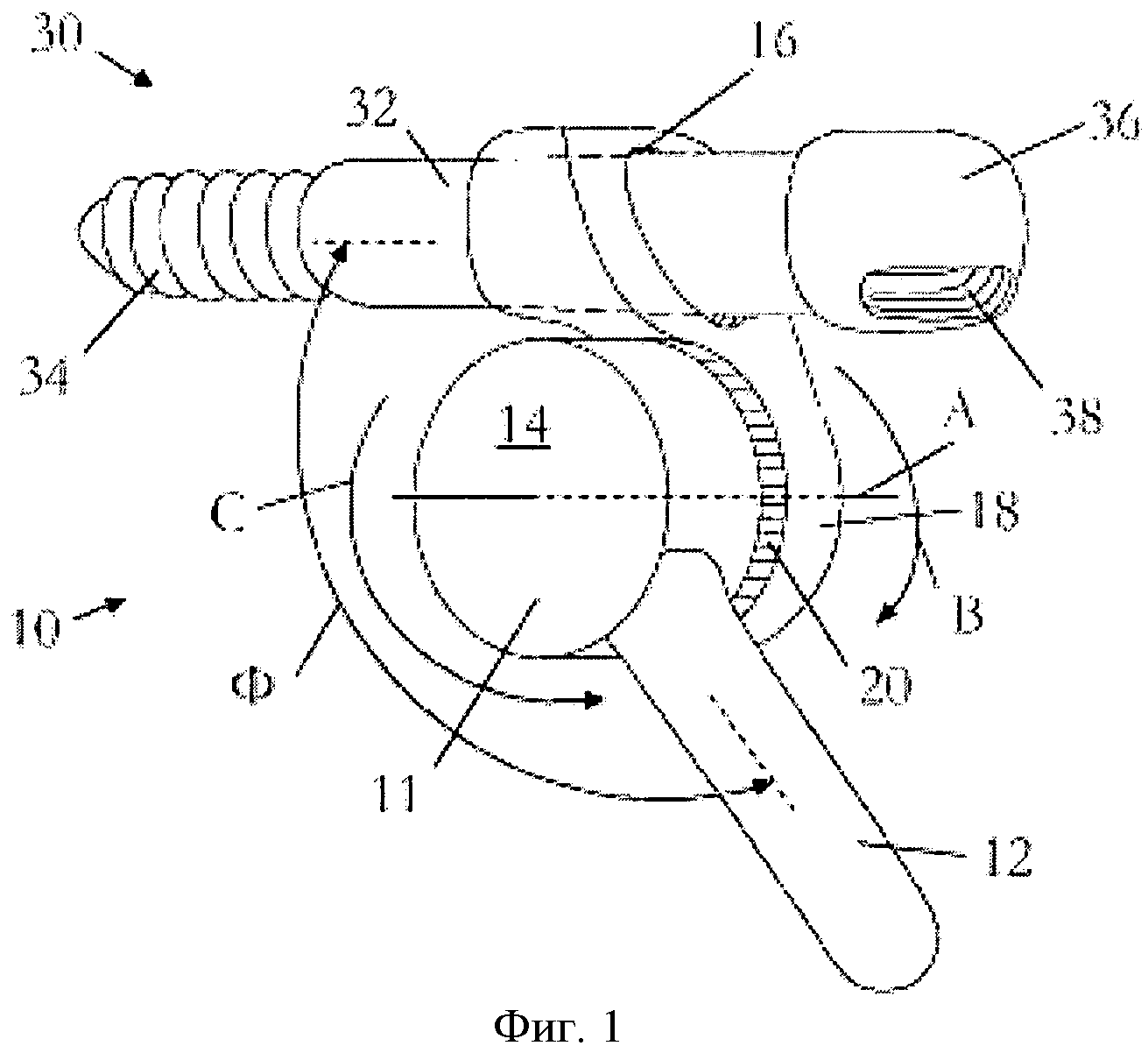
На Фиг.1 хирургическое устройство 10 для коррекции деформаций позвоночного столба включает механизм вращения 11 (по существу цилиндрической формы) для обеспечения вращения между двумя элементами; два элемента являются штифтом или охватываемым элементом 12 и механизмом 18 для соединения с элементом, фиксирующим кость 30. Штифт 12 является по существу цилиндрическим. В данном варианте воплощения механизм 18 для соединения с элементом, фиксирующим кость 30, является гнездом или охватывающим элементом 16, расположенным на поперечине, направленной в сторону от механизма 11, для обеспечения вращения.
Механизм вращения 11 включает храповой механизм 20, который позволяет осуществлять вращение двух сторон механизма вращения 11 только в противоположных направлениях относительно друг друга вокруг общей оси, обозначенной буквой "А". На Фиг.1 стрелка, обозначенная буквой "В", указывает направление, в котором разрешено вращение элемента, фиксирующего кость 30, и стрелка, обозначенная буквой "С", указывает направление, в котором разрешено вращение штифта 12. Угол между продольной осью штифта 12 и продольной осью элемента, фиксирующего кость 30, обозначен буквой "Ф". При использовании элемент, фиксирующий кость 30, и штифт 12 могут вращаться лишь в противоположных направлениях, так что угол Ф может увеличиваться, но не уменьшаться. Данное ограничение осуществляется с помощью храпового механизма 20.
Элемент, фиксирующий кость 30, включает в себя стержень 32, имеющий винтовую резьбу 34 на одном конце и головку 36 на другом конце. Головка 36 больше стержня 32 и гнезда 16, что таким образом предотвращает соскальзывание механизма вращения 11 с элемента, фиксирующего кость 30.
Стержень 32 элемента, фиксирующего кость 30, может вращаться в гнезде 16, таким образом, обеспечивая, при использовании, изгибание позвоночного столба в боковом направлении (во фронтальной плоскости).
Элемент, фиксирующий кость 30, включает гнездо или охватывающий элемент в головке 38. Это будет более детально описано ниже.
На Фиг.2 изображены два устройства 10 при использовании вместе с двумя смежными позвонками 40, 42. Элементы, фиксирующие кость 30, ввинчены в каждый позвонок 40, 42, так что каждое устройство 10 удерживается там головками 36 соответствующих элементов, фиксирующих кость 30. Штифт 12 верхнего устройства 10 помещен в гнездо 38 элемента, фиксирующего кость 30, удерживая нижнее устройство 10. Штифт 12 может вращаться и перемещаться по оси внутри гнезда 38, таким образом обеспечивая определенную свободу движения между смежными позвонками в отличие от движения, ограниченного храповым механизмом 20.
Гнездо 38 в головке 36 верхнего элемента, фиксирующего кость 30, может принимать штифт 12 другого устройства 10 (не изображено), прикрепленного к позвонку, который находится выше (не изображен). Подобным образом, штифт 12 самого нижнего устройства 10 может быть помещен в гнездо 38 другого устройства 10 (не изображено), прикрепленного к позвонку, который находится ниже (не изображен).
Из-за способности различных элементов (стержня, фиксирующего кость 32, и гнезда 16; штифта 12 и гнезда 38) перемещаться при необходимости относительно друг друга в одном или нескольких направлениях и/или плоскостях благодаря установленному допустимому пределу соответствующих охватываемых и охватывающих элементов, позвонки 40, 42 фактически не вращаются вокруг оси А (на Фиг.1). Вместо этого они будут вращаться вокруг естественных осей позвонков, которые расположены по существу в сагиттальной, поперечной и фронтальной плоскостях.
Ряд 100 устройств 110 могут быть прикреплены к ряду позвонков 40, 42, 44, 46, 48, образуя участок позвоночного столба, как изображено на Фиг.3. Эти устройства 110 слегка отличаются от устройств 10, описанных выше, но действуют подобным образом. Каждый из них включает механизм вращения 111 (по существу цилиндрической формы) для обеспечения вращения между элементом, фиксирующим кость 130, и штифтом 112. Каждый штифт 112 помещен в устройство 110, описанное ниже.
Таким образом, угол Ф может увеличиваться, но, по существу, не уменьшаться. Это значит, что вертикальный зазор "D" между передними краями смежных позвонков может увеличиваться, но, по существу, не уменьшаться.
Третий вариант воплощения устройства 210 изображен на Фиг.4. Он включает в себя штифт 212, прикрепленный к одной стороне 214 храпового механизма вращения 220, и элемент, фиксирующий кость 230, включающий винтовую резьбу 234 и стержень 232, прикрепленный непосредственно к другой стороне 218 храпового механизма 220. Две стороны 214, 218 составляют механизм вращения 211 (который имеет по существу цилиндрическую форму). Храповой механизм 220 ограничивает относительное вращательное движение двух сторон образом, подобным описанному выше.
В данном варианте воплощения в корпусе механизма вращения 211 имеется гнездо 238. Данное гнездо может принимать штифт 212 от смежного устройства 210, образом, подобным описанному выше, так, что группа устройств 210 может быть соединена между собой. Гнездо 238 расположено так, что штифт 212 может вращаться и перемещаться по оси и под углом внутри него, таким образом, обеспечивая определенную свободу движения между смежными позвонками, в отличие от движения, ограниченного храповым механизмом 20.
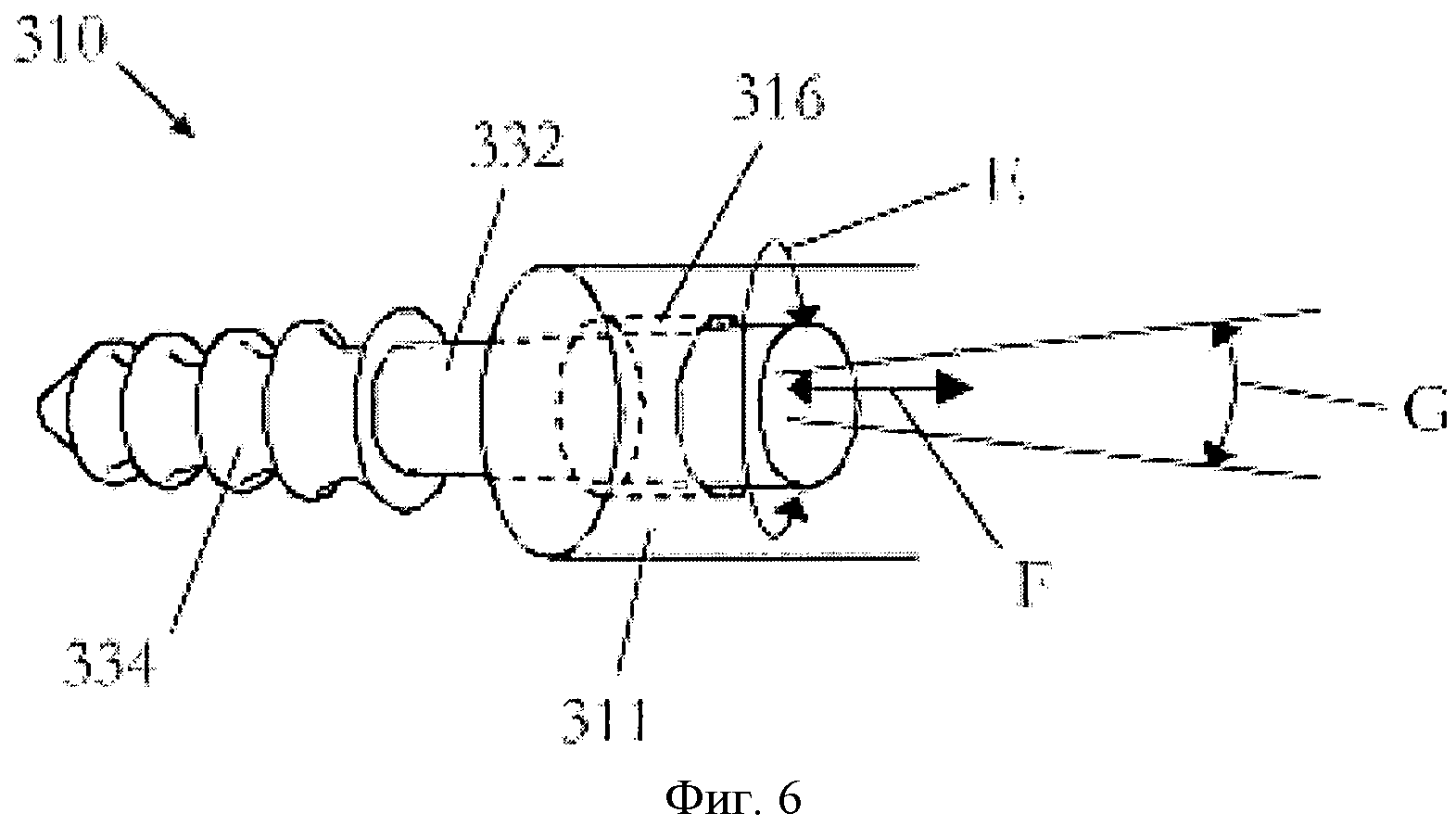
Четвертый вариант воплощения устройства 310 изображен на Фиг.5. Данное устройство 310 подобно устройству 210, изображенному на Фиг.4, за исключением того, что стержень 332 элемента, фиксирующего кость 330, не присоединен непосредственно к механизму вращения 311, который имеет по существу цилиндрическую форму. Вместо этого в корпусе механизма вращения 311 имеется гнездо 316, смежное с гнездом 338 для помещения штифта 312 смежного устройства 310. Данное гнездо 316 может принимать стержень 332 элемента, фиксирующего кость 330. Гнездо 316 расположено так, что штифт 312 может вращаться и перемещаться по оси и под углом внутри него, таким образом, обеспечивая определенную свободу движения между смежными позвонками в отличие от движения, ограниченного храповым механизмом 20. Более ясно это изображено на Фиг.6. Осевое движение обозначено буквой "F", вращательное движение обозначено буквой "Е", угловое движение обозначено буквой "G". Все другие особенности являются такими же, как те, что описаны в отношении Фиг.5.
Фиг.7 изображает два устройства 310, расположенных вместе и соединенных или прикрепленных к двум смежным позвонкам 40, 42, так что штифт 312 верхнего устройства 310 помещен в гнездо 238 нижнего устройства 310. Стрелка, обозначенная буквой "Н", указывает направление, в котором верхние позвонки 40 могут вращаться относительно оси вращения "А".
Фиг.8 показывает вращательное движение "I", осевое "J" и угловое "К" движение, которое может осуществлять верхний штифт 312 относительно нижнего гнезда 338. Также между ними может происходить некоторое вращательное движение (не изображено).
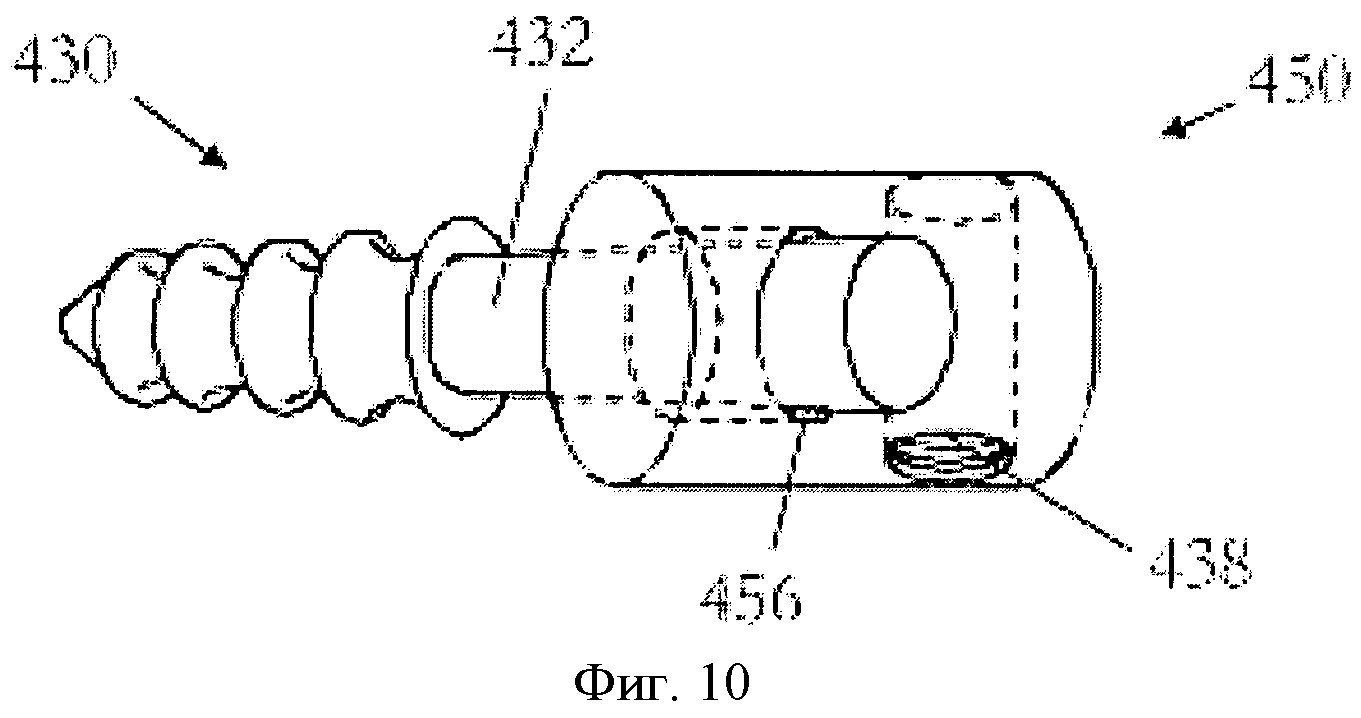
Другой вариант воплощения устройства 410 изображен на Фиг.9. Данное устройство 410 имеет механизм вращения 411 (по существу цилиндрической формы), включающий два храповых механизма 420а, 420b, которые делят механизм вращения 411 на три части. На каждой конечной части механизма вращения 411 имеется штифт 412а, 412b, который выдается вперед в радиальном направлении. В средней части механизма вращения 411 имеется гнездо или охватывающий элемент, 416. Данное гнездо 416 может принимать стержень 432 элемента, фиксирующего кость 430 (см. Фиг.10), так что он может быть прикреплен к позвонку. Каждый штифт 412а, 412b может соединяться с элементом, фиксирующим кость 43, с помощью прямого или непрямого соединения. Пример изображен на Фиг.10. Устройство 450 включает в себя по существу цилиндрический элемент, включающий два гнезда или охватывающих элемента, 438, 456, которые проходят в радиальном направлении сквозь цилиндрический элемент из одной стороны в другую. Данные два гнезда 438, 456 расположены на одной прямой, так, что их соответствующие отверстия по существу перпендикулярны друг другу. Стержень 432 элемента, фиксирующего кость, изображен помещенным в одно из гнезд 456. Другое гнездо 438 может принимать один из штифтов 412а, 412b, описанных выше. Два устройства 450 могут быть расположены по одному на каждом штифте 412а, 412b. Благодаря храповому механизму 420а верхний элемент, фиксирующий кость, в устройстве 450 и элемент, фиксирующий кость, в механизме вращения 411, могут вращаться относительно друг друга, но только в противоположных направлениях. Также благодаря храповому механизму 420b нижний элемент, фиксирующий кость, в другом устройстве 450, и элемент, фиксирующий кость, в механизме вращения 411 могут вращаться относительно друг друга, но только в противоположных направлениях.
Относительное вращение двух комплектов элементов, фиксирующих кость 430, может происходить вокруг общей оси, обозначенной буквой "L", которая проходит через продольную центральную ось по существу цилиндрического механизма вращения 411.
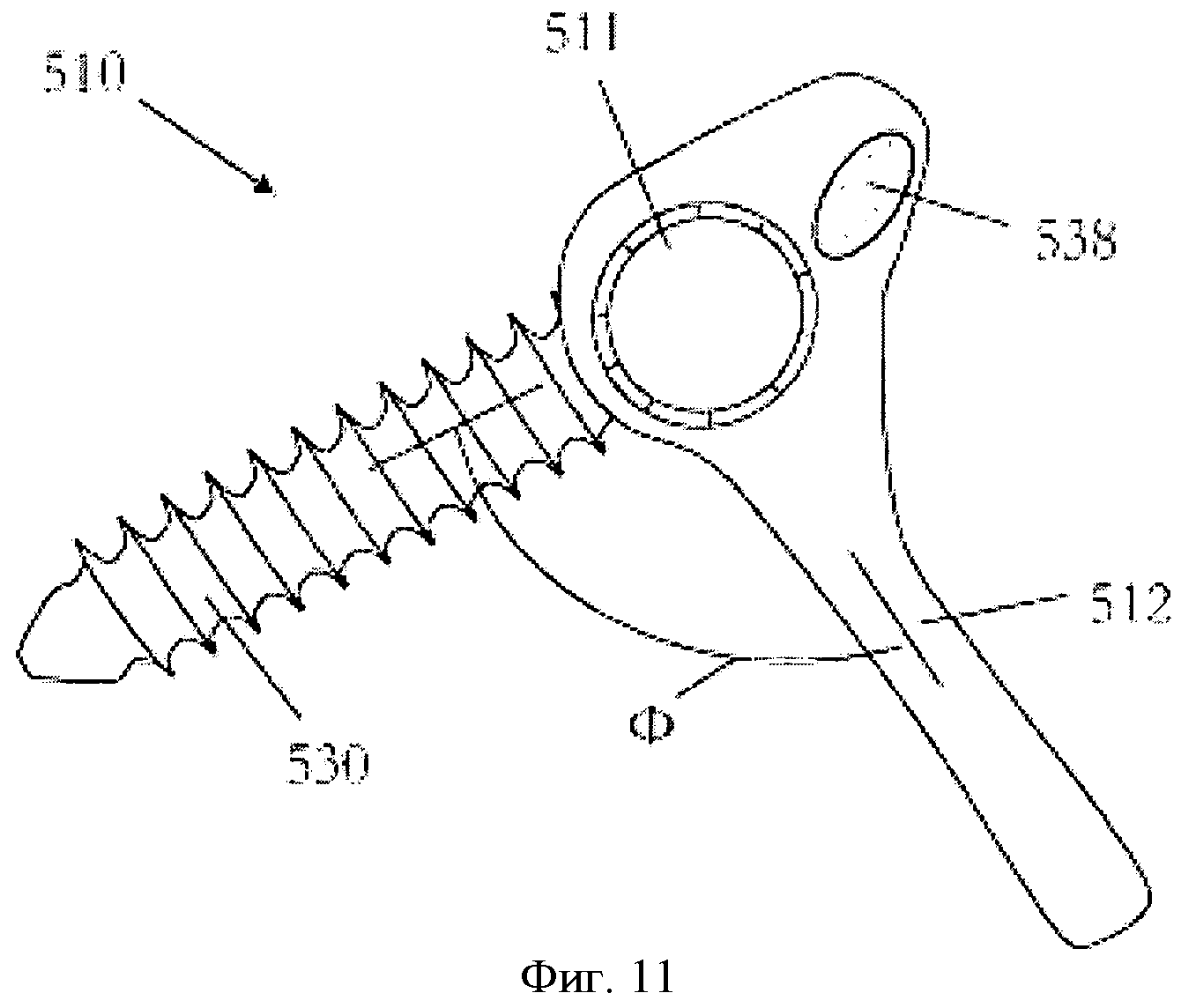
Фиг.11 изображает еще один вариант воплощения устройства 510. Данное устройство 510 включает элемент, фиксирующий кость 530, соединенный с возможностью вращения с одной стороной механизма вращения 511. С другой стороны механизма вращения 511 имеется штифт или охватываемый элемент 512. Штифт 512 и элемент, фиксирующий кость 530, могут вращаться относительно друг друга, ограничиваясь некоторыми механизмами, возможно храповым механизмом (не изображен), так что они могут вращаться лишь на расстоянии друг от друга (как изображено на фигуре), причем угол О может увеличиваться, но, по существу, не уменьшаться.
Гнездо или охватывающий элемент 538 оснащен механизмом вращения 511 для помещения штифта 512 от смежного устройства 510, как изображено на Фиг.12. Расположение гнезда 538 находится по существу на той же оси, что и продольная длина элемента, фиксирующего кость 530. Тем не менее, продольная ось/направление отверстия гнезда 538 по существу перпендикулярно продольной оси элемента, фиксирующего кость 530.
Данная фигура (элемент, фиксирующий кость 530, удален для ясности) также включает вариант устройства 510, изображенного на Фиг.11, в котором гнездо 539 является шаровой муфтой. Это обеспечивает угловое, а также осевое и вращательное движение штифта 512 смежного устройства 510 относительно устройства 510.
Другой вариант воплощения изображен на Фиг.13 и 14. Данное устройство 610 подобно устройству 510, описанному выше, имеющему механизм вращения 611 и элемент, фиксирующий кость 634. Тем не менее, гнездо 638 для помещения штифта 612 смежного устройства 610 расположено с одной стороны элемента, фиксирующего кость 634, как более ясно изображено на Фиг.14. Данный вид является видом на устройство 610 сзади в направлении длины элемента, фиксирующего кость 634. Гнездо 638 расположено на стороне храпового механизма 620, противоположной элементу, фиксирующему кость 634, и его отверстие по существу перпендикулярно продольной длине элемента, фиксирующего кость 634.
Девятый вариант воплощения изображен на Фиг.15. Данный вариант воплощения 710 включает в себя элемент, фиксирующий кость 730, который включает в себя винтовую резьбу 734, стержень 732 и головку 736. Головка включает гнездо 736 для помещения штифта 712 смежного устройства 710. Штифт 712 прикреплен к одной половине 717 механизма вращения 711 или образует с ним единое целое. Данный механизм вращения обеспечивает относительное вращение между штифтом 712 и элементом, фиксирующим кость 730, вокруг оси, которая по существу расположена вдоль пересечения поперечной и фронтальной плоскостей. Механизм вращения 711 включает в себя корпус 717, в основании которого присоединяется штифт 712, а на верхней части имеются две поперечины 718, 719. Другая половина механизма вращения 711 включает в себя корпус 721, на котором имеются две оси или штыря 715 (изображен только один), вокруг которых расположены две поперечины 718, 719, обеспечивая, таким образом, относительное вращение двух половин 717, 721. Корпус 721 также включает гнездо 716, в котором расположен стержень 732 элемента, фиксирующего кость 730, обеспечивая относительное вращательное движение между элементом, фиксирующим кость 730, и штифтом 712 вокруг продольной оси элемента, фиксирующего кость 730.
Механизм вращения 711 включает храповой механизм 720, который в данном случае включает в себя комплект зубцов на одной из двух половин 717, 721 и собачку на другой из двух половин. Возможно, что собачка может являться еще одним комплектом зубцов, комплекты зубцов расположены так, что позволить им скользить друг над другом в одном направлении, но предотвращать их скольжение в другом направлении.
Фиг.16 изображает вариант воплощения 810, который подобен девятому варианту воплощения, описанному в сочетании с Фиг.15. Единственное различие заключается в том, что устройство 810 включает механизм для прикрепления еще одного поперечного штыря 813 к головке 836 элемента, фиксирующего кость 830. Как вариант, поперечный штырь может составлять единое целое с головкой 836. Другой элемент, фиксирующий кость 830, находится на том же позвонке 40 и расположен поперечно от одной стороны к другой. Поперечный штырь 813 соединяет головки 836 двух элементов, фиксирующих кость 830. Таким образом, обеспечивается большая устойчивость структуры и позвоночного столба. Следует понимать, что принцип дополнительного элемента, фиксирующего кость 830, и взаимного соединения между двумя элементами, фиксирующими кость 830, в одном и том же позвонке может применяться к любым другим вариантам воплощения, описанным в данной заявке.
В предшествующем описании различных вариантов воплощения объяснялось, как угол Ф может увеличиваться, но не уменьшаться. Следует понимать, что также возможен противоположный эффект, а именно когда угол Ф может уменьшаться, но не увеличиваться. При необходимости на данное ограничение может влиять подходящая конструкция храпового механизма.
Хотя при описании различных гнезд или охватывающих элементов, 38, 238, 316, 338, 416, 456, 438, 538, 539, 638, объяснялось, что они расположены так, чтобы позволить относительное вращательное, осевое и угловое движение штифта или стержня, следует понимать, что в некоторых вариантах воплощения может быть желательно ограничить или даже запретить некоторые или все данные движения. Является возможным включать средства, такие как фасонные поверхности, для обеспечения лишь относительного движения между штифтом и/или стержнем и гнездом в одном или более направлениях (осевом, вращательном, угловом) и/или плоскостях (сагиттальной, фронтальной, поперечной). Например, может быть предпочтительно ограничивать относительное угловое движение в одной или более плоскостях, таких как сагиттальная плоскость.
Любой из вариантов воплощения, описанных в данной заявке, может включать шаровое шарнирное соединение в любом из гнезд.
Кроме того, хотя не все элементы, фиксирующие кость 30, 330, 430, изображены включающими головку с размером, превышающим размер гнезда, сквозь которое они могут быть помещены, следует понимать, что они могут включать такую головку для предотвращения их отсоединения от соответствующих устройств и/или механизмов вращения.
Реферат
Группа изобретений относится к медицине и может быть применима для коррекции деформаций позвоночного столба. Устройство для коррекции деформаций позвоночного столба включает механизм для выпрямления позвоночного столба, включающий два элемента, фиксирующих кость, причем каждый выполнен с возможностью прикрепления к позвонку позвоночного столба, и соединительный механизм для соединения двух элементов, фиксирующих кость, причем соединительный механизм включает первый охватываемый элемент и первый охватывающий элемент для соединения с по меньшей мере одним из указанных элементов, фиксирующих кость, а также механизм вращения для разрешения относительного вращения двух элементов, фиксирующих кость, вокруг общей оси. Механизм вращения включает храповой механизм, такой что два элемента, фиксирующих кость, могут вращаться вокруг общей оси по существу только в противоположных направлениях по существу посредством только лишь разрешения передним краям концевых пластинок двух по существу смежных позвонков сближаться друг с другом либо отдаляться друг от друга. Способ хирургической коррекции деформаций позвоночного столба включает установку устройства и вращение двух смежных позвонков так, чтобы разрешить сближение друг с другом передних краёв концевых пластинок смежных позвонков либо их отдаление друг от друга. Группа изобретений обеспечивает возможность постепенной коррекции деформации за счёт повседневных движений позвоночного столба. 2 н. и 13 з. п. ф-лы, 16 ил.
Формула
прикрепление механизма для выпрямления позвоночного столба к двум по существу смежным позвонкам, применяя указанные элементы, фиксирующие кость;
установку двух элементов, фиксирующих кость, в два по существу смежных позвонка;
соединение вместе двух элементов, фиксирующих кость, с механизмом для соединения; и
вращение двух по существу смежных позвонков вокруг общей оси по существу только в противоположных направлениях вращения, так чтобы разрешить сближение друг с другом передних краев концевых пластинок двух по существу смежных позвонков либо их отдаление друг от друга.
Документы, цитированные в отчёте о поиске
Устройство для коррекции деформации позвоночника
Комментарии