Винтовая пружина - RU2735389C1
Код документа: RU2735389C1
Чертежи









Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к винтовой пружине, которая может быть использована, например, в подвеске транспортного средства.
Предшествующий уровень техники
В качестве способа изготовления винтовой пружины известны способ образования винтовой пружины посредством горячей обработки и способ образования винтовой пружины посредством холодной обработки. Винтовую пружину, образуемую посредством горячей обработки, образуют со спиральной формой посредством навивки проволоки, которая нагрета до высокой температуры (например, температуры аустенизации стали) вокруг оправки (сердечника) с заданным шагом. Длина проволоки эквивалентна длине одной винтовой пружины. В данном описании устройство, которое обеспечивает изготовление винтовой пружины посредством горячей обработки, упоминается как машина для горячей навивки, и винтовая пружина, образованная посредством горячей обработки, упоминается как винтовая пружина горячей навивки. Поскольку машина для горячей навивки обеспечивает навивку проволоки, которая была размягчена в результате нагрева, вокруг оправки, она пригодна для изготовления винтовой пружины, имеющей сравнительно большой диаметр проволоки.
В отличие от этого винтовую пружину, образуемую посредством холодной обработки, изготавливают так, что проволоку, имеющую длину, эквивалентную длине множества винтовых пружин, подают между первым штырем и вторым штырем навивочной машины, и проволоке непрерывно придают дугообразную форму между первым штырем и вторым штырем. Когда из проволоки будет образована одна винтовая пружина, проволоку разрезают резаком. В данном описании устройство, которое обеспечивает изготовление винтовой пружины посредством холодной обработки, упоминается как машина для холодной навивки, и винтовая пружина, образованная посредством холодной обработки, упоминается как винтовая пружина холодной навивки. Машина для холодной навивки может обеспечить изготовление винтовой пружины особой формы, отличной от цилиндрической формы.
Фиг.13А схематически показывает пример обычной винтовой пружины 100. Часть 100а нижнего концевого витка винтовой пружины 100 опирается на нижнюю опору 101 для пружины. Часть 100b верхнего концевого витка винтовой пружины 100 опирается на верхнюю опору 102 для пружины. Положения опор 101 и 102 для пружины определяют в соответствии с техническими характеристиками сопряженных компонентов, которые обеспечивают опору для винтовой пружины. Поскольку проволока намотана по спирали, винтовая пружина 100 не является симметричной относительно центра спирали. Известно, что при приложении сжимающей нагрузки F1 к винтовой пружине 100 рабочая часть 100с соответственно деформируется в направлении, показанном стрелкой f1 и происходит так называемое выгибание. Выгибание имеет тенденцию к возникновению, в частности, в винтовой пружине, имеющей малое число витков (например, когда число витков составляет пять или менее). Винтовая пружина 100, имеющая выгиб, может воздействовать на окружающие компоненты нежелательным образом, и поэтому такая винтовая пружина 100 нежелательна.
Для предотвращения возникновения выгибания также была предложена винтовая пружина 110, которая образована с C–образной или S–образной формой в ее свободной конфигурации (конфигурация ненагруженного состояния) без воздействия приложенной нагрузки, как показано в другом обычном примере, проиллюстрированном на фиг.13В. Задача состоит в том, чтобы обеспечить прямолинейность рабочей части 110с при деформировании рабочей части 110с винтовой пружины 110 в направлении, показанном стрелкой f2, в состоянии, в котором приложена сжимающая нагрузка F1.
Перечень ссылок
Патентные литературные источники
Патентный литературный источник 1: JP Н01–156119 А
Патентный литературный источник 2: JP 2642163 В
Сущность изобретения
Техническая проблема
В патентном литературном источнике 1 (JP Н01–156119 А) или патентном литературном источнике 2 (JP 2642163 В) раскрыта винтовая пружина, образованная с C–образной формой. Поскольку иногда трудно на самом деле изготовить винтовую пружину с такой особой формой посредством машины для горячей навивки, используют машину для холодной навивки. Однако в случае, когда винтовая пружина, имеющая большой диаметр проволоки, должна быть изготовлена посредством машины для холодной навивки, должны быть приняты особые меры в отношении конструкции навивочной машины и управления ею.
Задача настоящего изобретения состоит в том, чтобы предложить винтовую пружину, которая может быть изготовлена посредством машины для горячей навивки и в которой выгибание подавляется.
Решение проблемы
Один вариант осуществления настоящего изобретения относится к винтовой пружине, включающей в себя проволоку, которой придана спиральная форма, и расположенной между нижней опорой для пружины и верхней опорой для пружины, и винтовая пружина содержит: часть нижнего концевого витка, которая находится в контакте с нижней опорой для пружины, часть верхнего концевого витка, которая находится в контакте с верхней опорой для пружины, рабочую часть между частью нижнего концевого витка и частью верхнего концевого витка, и линию действия силы, которая представляет собой прямую линию, соединяющую центр приложения силы, приложенной к части нижнего концевого витка, и центр приложения силы, приложенной к части верхнего концевого витка, в состоянии, в котором сила, которая обеспечивает сжатие рабочей части, приложена к части нижнего концевого витка и части верхнего концевого витка. Рабочая часть является цилиндрической относительно оси рабочей части в ее свободной конфигурации (без приложения нагрузки) в состоянии, в котором винтовая пружина не сжата. То есть, винтовая пружина является цилиндрической относительно рабочей части как ее центральной оси в состоянии, в котором не приложена никакая нагрузка. Кроме того, по отношению к системе координат, в которой ось рабочей части принята в качестве оси Z, рабочая часть имеет постоянный шаг в направлении вдоль оси Z в ее свободной конфигурации (без приложения нагрузки), в которой она не сжата.
Кроме того, по отношению к системе координат, в которой линия действия силы принята в качестве оси Z, рабочая часть является цилиндрической (цилиндрической относительно линии действия силы как ее центральной оси) с постоянным шагом в направлении вдоль оси Z в ее сжатой конфигурации (конфигурация нагруженного состояния) на заданной высоте. Кроме того, в данной винтовой пружине центр каждой из части нижнего концевого витка и части верхнего концевого витка предпочтительно должен быть смещен от центра спирали в соответствии с разницей между линией действия силы и центром нижней опоры для пружины и разницей между линией действия силы с центром верхней опоры для пружины, и наклон части нижнего концевого витка и наклон части верхнего концевого витка на заданной высоте предпочтительно должны быть выполнены так, чтобы обеспечить соответствие наклону нижней опоры для пружины и наклону верхней опоры для пружины соответственно.
Предпочтительные эффекты от изобретения
В случае винтовой пружины по данному варианту осуществления в состоянии, в котором винтовая пружина сжата до заданной высоты, рабочая часть не имеет выгибания. Соответственно, в состоянии, в котором винтовая пружина встроена, например, в подвеску транспортного средства, может быть предотвращено нежелательное воздействие винтовой пружины на окружающие компоненты. Кроме того, винтовая пружина по данному варианту осуществления может быть изготовлена посредством машины для горячей навивки.
Краткое описание чертежей
Фиг.1 представляет собой вид в разрезе подвески, содержащей винтовую пружину согласно первому варианту осуществления.
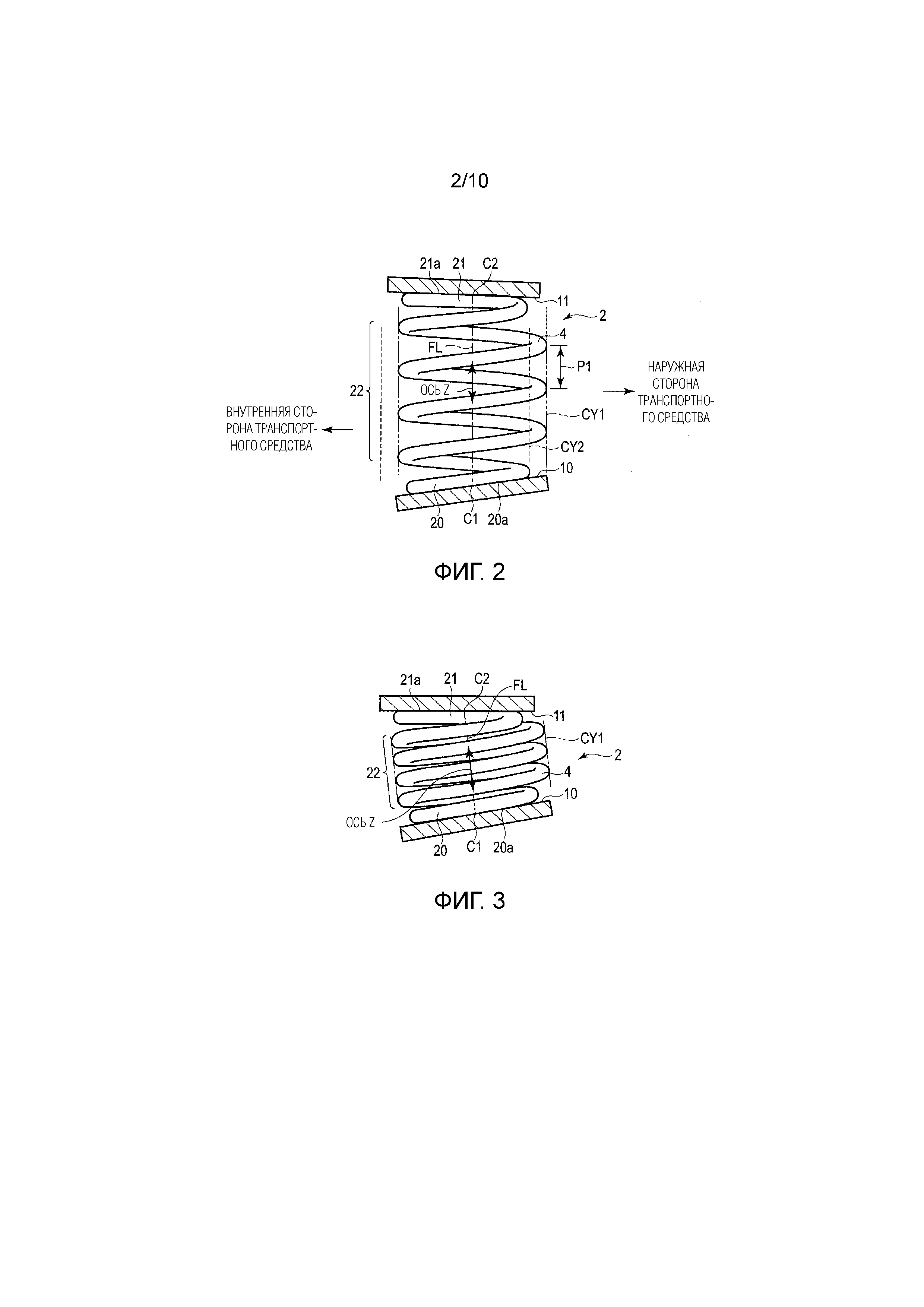
Фиг.2 представляет собой вид сбоку винтовой пружины, показанной на фиг.1.
Фиг.3 представляет собой вид сбоку винтовой пружины, сжатой до максимума.
Фиг.4 представляет собой вид сбоку винтовой пружины, растянутой до максимума.
Фиг.5 представляет собой иллюстрацию, схематически показывающую нижнюю опору для пружины и верхнюю опору для пружины в подвеске, показанной на фиг.1.
Фиг.6 представляет собой график, показывающий зависимость между положением витков от конца проволоки винтовых пружин каждого из трех типов и расстоянием от линии действия силы.
Фиг.7 представляет собой график, показывающий зависимость между положением витков от конца проволоки винтовой пружины, показанной на фиг.2, и шагом.
Фиг.8 представляет собой график, показывающий зависимость между положением витков от конца проволоки винтовых пружин каждого из трех типов и высотой.
Фиг.9 представляет собой вид в плане части машины для горячей навивки.
Фиг.10 представляет собой вид сбоку винтовой пружины согласно второму варианту осуществления.
Фиг.11 представляет собой вид сбоку винтовой пружины, показанной на фиг.10, сжатой до максимума.
Фиг.12 представляет собой вид сбоку винтовой пружины, показанной на фиг.10, растянутой до максимума.
Фиг.13А представляет собой вид в разрезе обычной винтовой пружины.
Фиг.13В представляет собой вид в разрезе другой обычной винтовой пружины.
Вариант осуществления изобретения
Винтовая пружина согласно одному варианту осуществления настоящего изобретения будет описана далее со ссылкой на фиг.1–9.
Подвеска 1 Макферсона, показанная на фиг.1, содержит винтовую пружину 2 подвески (в дальнейшем упоминаемую просто как винтовая пружина 2) и стойку 3, образованную из амортизатора. Винтовая пружина 2 содержит проволоку 4, изготовленную из пружинной стали, которой придана спиральная форма. Винтовая пружина 2 установлена в подвеске 1 в состоянии, в котором она сжимается между нижней опорой 10 для пружины и верхней опорой 11 для пружины. Верхний конец стойки 3 установлен на кузове 13 транспортного средства посредством изоляционной опоры 12. Кронштейн 15 предусмотрен в нижней части стойки 3. Поворотный кулак 16 (только часть которого показана) для обеспечения опоры для оси установлен на кронштейне 15. Стойка 3 установлена в кузове 13 транспортного средства в таком состоянии, что верхняя концевая сторона стойки 3 наклонена, более конкретно, ось X0 наклонена к внутренней стороне транспортного средства под углом Ɵ1 относительно вертикальной линии XL действия силы тяжести.
Винтовая пружина 2, показанная на фиг.2, сжимается между нижней опорой 10 для пружины и верхней опорой 11 для пружины. Фиг.3 показывает состояние, в котором винтовая пружина 2 сжата до максимума. Фиг.4 показывает состояние, в котором винтовая пружина 2 растянута до максимума. Винтовая пружина 2 включает в себя часть 20 нижнего концевого витка, опирающуюся на нижнюю опору 10 для пружины, часть 21 верхнего концевого витка, опирающуюся на верхнюю опору 11 для пружины, и рабочую часть 22 между частями 20 и 21 концевых витков. Нижняя поверхность 20а части 20 нижнего концевого витка находится в контакте с нижней опорой 10 для пружины. Верхняя поверхность 21а части 21 верхнего концевого витка находится в контакте с верхней опорой 11 для пружины. Рабочая часть 22 представляет собой часть, в которой соседние витые части проволоки 4 не контактируют друг с другом в состоянии, в котором винтовая пружина 2 сжата до максимума, и которая эффективно функционирует в качестве рессоры. Число витков рабочей части 22 составляет, например, четыре. Часть 20 нижнего концевого витка относится к части, проходящей от нижнего конца проволоки 4 до точки, соответствующей, например, приблизительно 0,6–0,7 витка. Часть 21 верхнего концевого витка относится к части, проходящей от верхнего конца проволоки 4 до точки, соответствующей, например, приблизительно 0,8 витка. Нижняя опора 10 для пружины может перемещаться относительно верхней опоры 11 для пружины в направлении вдоль оси X0 стойки 3.
В состоянии, в котором винтовая пружина 2 сжата, нижняя опора 10 для пружины и часть 20 концевого витка контактируют друг с другом, и существует центр С1 приложения силы, приложенной к части 20 концевого витка. Центр С1 приложения силы необязательно представляет собой центр витка (центр кривизны) для части 20 концевого витка. То есть, центр С1 приложения силы зависит от распределения контактного усилия между опорой 10 для пружины и частью 20 концевого витка. Поскольку верхняя опора 11 для пружины и часть 21 концевого витка контактируют друг с другом, существует центр С2 приложения силы, приложенной к части 21 концевого витка. В данном описании прямая линия, соединяющая центр С1 приложения силы, приложенной к части 20 нижнего концевого витка, и центр С2 приложения силы, приложенной к части 21 верхнего концевого витка, будет упоминаться как линия FL действия силы. Местоположение линии действия силы (то есть, положение линии действия силы) может для краткости упоминаться как FLP. Линия FL действия силы находится в месте, смещенном в радиальном направлении от центра витка, соответствующего части 20 нижнего концевого витка, и центра витка, соответствующего части 21 верхнего концевого витка.
В винтовой пружине 2 по данному варианту осуществления формы частей 20 и 21 концевых витков и децентрированное положение каждой из частей 20 и 21 концевых витков относительно центра кривизны подобраны так, чтобы центр спирали рабочей части 22 совпадал с линией FL действия силы в сжатом состоянии (при сжатой конфигурации). То есть, рабочая часть 22 винтовой пружины 2 является цилиндрической с по существу постоянным диаметром спирали/витка, при этом линия FL действия силы находится в центре. «По существу постоянный» в вышеприведенном описании означает то, что при образовании цилиндрической рабочей части 22 посредством навивки проволоки 4 вокруг оправки машины для горячей навивки погрешность формования, находящаяся в пределах допуска, и отклонения форм, обусловленные упругим последействием, ничтожно малы. Шаг Р1 (фиг.2) рабочей части 22 является по существу постоянным в системе координат, в которой линия FL действия силы принята в качестве оси Z. Соответственно, винтовая пружина 2 сжимается равномерно вокруг линии FL действия силы под действием сжимающей нагрузки, действующей в направлении вдоль оси Z.
Штрихпунктирная линия CY1 с двумя штрихами, показанная на фиг.2–4, показывает положение наружной окружной периферии рабочей части 22. Пунктирная линия CY2 на фиг.2 показывает положение наружной окружной периферии рабочей части обычной винтовой пружины. Рабочая часть обычной винтовой пружины расположена ближе к внутренней стороне транспортного средства по сравнению с рабочей частью 22 по данному варианту осуществления. Положения опор 10 и 11 для пружины не различаются для обычной пружины и данного варианта осуществления.
При приложении сжимающей нагрузки, действующей вдоль оси Z, к винтовой пружине 2, рабочая часть 22 сжимается между нижней опорой 10 для пружины и верхней опорой 11 для пружины. Винтовая пружина 2 по данному варианту осуществления не поддается выгибанию независимо от того, находится ли она в ее свободном состоянии/свободной конфигурации, в котором (–й) она не сжата, или в ее сжатом состоянии/сжатой конфигурации.
В свободной конфигурации (когда нагрузка не приложена) рабочая часть 22 является цилиндрической относительно оси. То есть, рабочая часть 22 в свободной конфигурации является цилиндрической относительно той оси рабочей части 22, которая представляет собой ее центральную ось. Кроме того, по отношению к системе координат, в которой ось рабочей части 22 принята в качестве оси Z, рабочая часть 22 имеет постоянный шаг в направлении вдоль оси Z в ее свободной конфигурации.
В системе координат, в которой линия FL действия силы принята в качестве оси Z, рабочая часть 22 в ее сжатой конфигурации, в которой она сжата до заданной высоты, является цилиндрической с постоянным шагом в направлении вдоль оси Z (линии FL действия силы). По отношению к системе координат, в которой линия FL действия силы принята в качестве оси Z, рабочая часть 22 сжатой винтовой пружины 2 является цилиндрической относительно линии FL действия силы и имеет постоянный шаг.
В отличии от свободной конфигурации рабочая часть 22 в сжатой конфигурации имеет диаметр ее спирали, равномерно увеличенный по всему витку вокруг линии FL действия силы. То есть, при сжатии винтовой пружины 2 винтовая пружина 2 равномерно расширяется относительно линии FL действия силы. Расширенная винтовая пружина 2 будет воздействовать нежелательным образом на окружающие компоненты с меньшей вероятностью по сравнению с винтовой пружиной, имеющей выгибание.
Как показано на фиг.5, нижняя опора 10 для пружины имеет наклон под углом Ɵ2 относительно отрезка S1 прямой, перпендикулярного к линии FL действия силы. Верхняя опора 11 для пружины имеет наклон под углом Ɵ3 относительно отрезка S2 прямой, перпендикулярного к линии FL действия силы. То есть, нижняя опора 10 для пружины и верхняя опора 11 для пружины не параллельны друг другу. Кроме того, линия FL действия силы имеет наклон под углами Ɵ2 и Ɵ3 и проходит наискось относительно нижней опоры 10 для пружины и верхней опоры 11 для пружины.
Величина смещения линии FL действия силы от центра части концевого витка на высоте пружины (заданной высоте), на которой не должно происходить выгибание, задана как величина децентрирования каждой из нижней опоры 10 для пружины и верхней опоры 11 для пружины. Кроме того, углы Ɵ2 и Ɵ3 заданы как углы опорной поверхности соответственно нижней опоры 10 для пружины и верхней опоры 11 для пружины. Однако направление выгибания винтовой пружины может отклоняться от направления наклона опор 10 и 11 для пружины. В этом случае ориентация и угол опорной поверхности каждой из опор 10 и 11 для пружины должны быть немного скорректированы посредством наклона опорной поверхности в направлении устранения выгибания.
Например, в винтовой пружине 2 по данному варианту осуществления центр каждой из части 20 нижнего концевого витка и части 21 верхнего концевого витка смещен от центра спирали в соответствии с разницей между линией FL действия силы и центром нижней опоры 10 для пружины и разницей между линией FL действия силы и центром верхней опоры 11 для пружины. Кроме того, наклон части 20 нижнего концевого витка и наклон части 21 верхнего концевого витка на заданной высоте выполнены так, чтобы обеспечить соответствие наклону нижней опоры 10 для пружины и наклону верхней опоры 11 для пружины соответственно.
Линия L1 на фиг.6 показывает зависимость между положением витков от конца проволоки 4 винтовой пружины 2 и расстоянием от линии FL действия силы для той же пружины. Как показано посредством линии L1 на фиг.6, в рабочей части расстояние от линии FL действия силы до проволоки является по существу постоянным относительно линии FL действия силы. В одном примере части нижнего концевого витка, показанном посредством ссылочной позиции W1, часть нижнего концевого витка представлена в виде волны, показывающей, что расстояние от линии FL действия силы сначала увеличивается и затем уменьшается при продвижении от нижнего конца проволоки к рабочей части. В одном примере части верхнего концевого витка, показанном посредством ссылочной позиции W2, часть верхнего концевого витка представлена в виде волны, показывающей, что расстояние от линии FL действия силы сначала уменьшается и затем увеличивается при продвижении от верхнего конца проволоки к рабочей части. Линия L2 на фиг.6 показывает зависимость между положением витков от конца проволоки обычной винтовой пружины (имеющей четыре витка) и расстоянием от линии FL действия силы. В обычной винтовой пружине расстояние от линии FL действия силы до проволоки в значительной степени изменяется относительно линии FL действия силы.
Линия L3 на фиг.7 показывает зависимость между положением витков от конца проволоки и шагом в состоянии, в котором винтовая пружина 2 сжата (то есть, при сжатой конфигурации). Линия L4 на фиг.7 показывает зависимость между положением витков от конца проволоки и шагом при свободной конфигурации/в свободном состоянии, в котором винтовая пружина 2 не сжата. В сжатой конфигурации шаг рабочей части по существу постоянен относительно направления вдоль линии FL действия силы (направления оси Z). В свободной конфигурации/свободном состоянии, в котором никакая нагрузка не приложена, шаг рабочей части по существу постоянен относительно центра спирали рабочей части.
Линия L5 на фиг.8 показывает зависимость между положением витков от конца проволоки, когда винтовая пружина 2 находится в ее свободной конфигурации, и высотой данных витков. Как показано посредством линии L5 на фиг.8, высота рабочей части постепенно увеличивается в соответствии с положением витков от конца. В одном примере части нижнего концевого витка часть нижнего концевого витка представлена в таком виде, что высота сначала значительно увеличивается и затем увеличение уменьшается (то есть изменяется волнообразно) от нижнего конца проволоки к рабочей части. В одном примере части верхнего концевого витка высота увеличивается при продвижении к верхнему концу проволоки. Напротив, в одном примере обычной винтовой пружины, показанном линией L6 на фиг.8, высота части нижнего концевого витка и высота части верхнего концевого витка почти не изменяются, и поэтому данные части показаны в виде горизонтальной линии.
Фиг.9 показывает часть машины 30 для горячей навивки, предназначенной для изготовления винтовой пружины. Навивочная машина 30 включает в себя колоннообразную оправку 31, зажимное устройство 33 и направляющую часть 35. Концевая часть 31а с одной стороны оправки 31 имеет форму, соответствующую части концевого витка на одном конце (на стороне, соответствующей началу навивки) винтовой пружины. Направляющая часть 35 включает в себя направляющие элементы 39а и 39b.
Проволоку 4, образованную из пружинной стали, заранее отрезают с длиной, эквивалентной длине одной винтовой пружины. Проволоку 4 нагревают до температуры аустенизации (то есть, более высокой, чем температура превращения А3, и более низкой, чем 1150°С) и подают к оправке 31 посредством механизма подачи. Зажимное устройство 33 обеспечивает фиксацию дистального конца проволоки 4 относительно оправки 31. Направляющая часть 35 обеспечивает регулирование положения проволоки 4, наматываемой вокруг оправки 31. Концевая часть 31а на одной стороне оправки 31 удерживается приводной головкой 40 для оправки. Оправка 31 вращается вокруг оси Х1 посредством приводной головки 40 для оправки. Концевая часть 31b на другой стороне оправки 31 опирается на держатель 50 оправки с возможностью вращения. Направляющая часть 35 перемещается в направлении вдоль оси Х1 оправки 31 и направляет проволоку 4 в соответствии с углом подъема спирали винтовой пружины, которая должна быть образована.
Проволока 4 имеет длину, эквивалентную длине одной винтовой пружины. Проволоку 4 нагревают до температуры, подходящей для горячей обработки, посредством печи. Дистальный конец нагретой проволоки 4 фиксируют относительно оправки 31 посредством зажимного устройства 33. Помимо вращения оправки 31 направляющая часть 35 перемещается в направлении вдоль оси Х1 оправки 31 синхронно с вращением оправки 31. Посредством этого проволока 4 наматывается вокруг оправки 31 с заданным шагом. Вышеприведенное разъяснение относится к случаю изготовления винтовой пружины посредством машины 30 для горячей навивки. Винтовая пружина по данному варианту осуществления может быть также изготовлена посредством машины для холодной навивки.
Фиг.10 показывает винтовую пружину 2А согласно второму варианту осуществления. Фиг.11 представляет собой вид сбоку винтовой пружины 2А, сжатой до максимума. Фиг.12 представляет собой вид сбоку винтовой пружины 2А, растянутой до максимума. Аналогично винтовой пружине 2 по первому варианту осуществления, винтовая пружина 2А включает в себя часть 20А нижнего концевого витка, опирающуюся на нижнюю опору 10 для пружины, часть 21А верхнего концевого витка, опирающуюся на верхнюю опору 11 для пружины, и рабочую часть 22А между частями 20А и 21А концевых витков.
Число витков рабочей части 22А составляет три. Диаметр спирали рабочей части 22А больше диаметра спирали рабочей части 22 по первому варианту осуществления. Как и в случае рабочей части 22 по первому варианту осуществления, рабочая часть 22А имеет форму (цилиндрическую форму) без выгибания относительно линии FL действия силы независимо от того, находится ли она в ее свободной конфигурации или в ее сжатой конфигурации. То есть, рабочая часть 22А является цилиндрической относительно оси рабочей части 22А в ее свободной конфигурации, когда она не сжата. Кроме того, в системе координат, в которой линия FL действия силы принята в качестве оси Z, рабочая часть 22А в ее сжатой конфигурации, в которой она сжата до заданной высоты, является цилиндрической с постоянным шагом в направлении вдоль оси Z (линии FL действия силы).
Диаметр проволоки 4А по второму варианту осуществления меньше диаметра проволоки 4 по первому варианту осуществления. Штрихпунктирная линия CY3с двумя штрихами, показанная на фиг.10–12, показывает положение наружной окружной периферии рабочей части 22А. Пунктирная линия CY4 на фиг.10 показывает положение наружной окружной периферии рабочей части обычной винтовой пружины. Рабочая часть обычной винтовой пружины расположена ближе к внутренней стороне транспортного средства по сравнению с рабочей частью 22А по данному варианту осуществления. Положения опор 10 и 11 для пружины не различаются для обычной пружины и данного варианта осуществления.
Линия L17 на фиг.6 показывает зависимость между положением витков от конца проволоки винтовой пружины 2А по второму варианту осуществления и расстоянием от линии FL действия силы для той же пружины. Как показано посредством линии L17 на фиг.6, в рабочей части расстояние от линии FL действия силы до проволоки является по существу постоянным относительно линии FL действия силы. Как показано посредством ссылочной позиции W1, часть нижнего концевого витка представлена в виде волны, показывающей, что расстояние от линии FL действия силы сначала увеличивается и затем уменьшается при продвижении от нижнего конца проволоки к рабочей части. Как показано посредством ссылочной позиции W2, часть верхнего концевого витка представлена в виде волны, показывающей, что расстояние от линии FL действия силы сначала уменьшается и затем увеличивается при продвижении от верхнего конца проволоки к рабочей части.
Линия L18 на фиг.8 показывает зависимость между положением витков от конца проволоки, когда винтовая пружина 2А по второму варианту осуществления находится в ее свободной конфигурации, и высотой данных витков. Как показано посредством линии L18 на фиг.8, высота рабочей части постепенно увеличивается в соответствии с положением витков от конца. Часть нижнего концевого витка представлена в таком виде, что высота сначала увеличивается и затем уменьшается (то есть изменяется волнообразно) от нижнего конца проволоки к рабочей части. В части верхнего концевого витка высота увеличивается при продвижении к верхнему концу проволоки.
Промышленная применимость
Винтовая пружина может быть использована, например, в подвеске типа кулисного механизма, а не только в подвеске Макферсона. Кроме того, винтовая пружина по данному варианту осуществления может быть использована в случае применения, отличном от подвески.
Перечень ссылочных позиций
1 - подвеска, 2 - винтовая пружина, 3 - стойка, 4 - проволока, 10 - нижняя опора для пружины, 11 - верхняя опора для пружины, 20 - часть нижнего концевого витка, 21 - часть верхнего концевого витка, 22 - рабочая часть, С1, С2 - центр приложения силы, FL - линия действия силы.
Реферат
Изобретение относится к машиностроению. Винтовая пружина (2) включает в себя часть (20) нижнего концевого витка, которая находится в контакте с нижней опорой (10) для пружины. Часть (21) верхнего концевого витка находится в контакте с верхней опорой (11) для пружины. Рабочая часть (22) выполнена между частью (20) нижнего концевого витка и частью (21) верхнего концевого витка. Винтовая пружина (2) является цилиндрической относительно оси рабочей части (22) в свободной конфигурации, в которой она не сжата. По отношению к системе координат, в которой линия (FL) действия силы принята в качестве оси Z, винтовая пружина (2) является цилиндрической с постоянным шагом в направлении вдоль оси Z в ее сжатой конфигурации, в которой она сжата до заданной высоты. Достигается выравнивание напряжений без создания выгибания в состоянии сжатия до заданной высоты, а также возможность изготовления на машине горячей навивки с использованием колоннообразной оправки. 2 з.п. ф-лы, 14 ил.
Комментарии