Ручка интуитивного управления летательным аппаратом - RU189484U1
Код документа: RU189484U1
Чертежи
Описание
Полезная модель относится к области авиации, космонавтики, мореплавания, пилотируемых и беспилотных летательных аппаратов и подводных судов, систем дистанционного наведения оружия на цель, в частности, средствам ручного электродистанционного управления летательными аппаратами.
Известно многофункциональное устройство управления подвижным объектом (патент RU №2616231 МПК G05G 9/047, В64С 13/04, В64С 13/06, опубл. 13.04.2017), шарнирно соединенное с предплечьем и содержащее рукоятку управления, соединенный с ней узел контроля поворота кисти руки вокруг трех осей, включающий датчики углов поворота, соединенный с указанным узлом элемент крепления к предплечью и пристяжной элемент, при этом узел контроля поворота кисти руки вокруг трех осей включает устройство управления по каналу азимута, устройство управления по поперечному каналу и устройство управления по продольному каналу, а устройство управления по каналу азимута включает два шарнирно соединенных друг с другом элемента, первый из которых соединен с рукояткой. В шарнирном соединении размещен первый датчик угла поворота, устройство управления по поперечному каналу включает два шарнирно соединенных друг с другом элемента, первый из которых соединен со вторым элементом устройства управления по каналу азимута, в шарнирном соединении размещен второй датчик угла поворота, а ось поворота шарнира перпендикулярна оси поворота шарнира устройства управления каналом азимута, устройство управления продольным каналом включает два элемента, соединенных друг с другом с возможностью перемещения друг относительно друга по дуге.
Недостатком устройства является невозможность использования бортовой панели летательного аппарата или иного подвижного объекта для размещения органов управления вспомогательных агрегатов, невозможность осуществления смены рук для отдыха, создание угрозы жизни пилоту за счет потери времени на освобождение от пристяжных элементов при аварийном покидании летательного аппарата.
Известен мультистепенной джойстик для дистанционного управления (патент US №5379663, МПК G05G 1/62, опубл. 01.10.1995 г.), содержащий базовый кронштейн, соединенный с основанием вертикальным валом и горизонтальным валом с телескопической удлиняемой ручкой, на которую как на подлокотник опирается предплечье оператора и фиксируется на нем с помощью ремня, передний конец удлиняемой ручки посредством вертикального вала соединен со вторым кронштейном, второй кронштейн горизонтальным валом соединен с первым кронштейном, причем на валах соединяющих звенья, установлены датчики позиционирования с нейтральным положением, отличающийся тем, что передний конец первого кронштейна посредством горизонтального вала, ось которого перпендикулярна и пересекается с вертикальной и горизонтальной осями валов второго кронштейна и с центром запястья оператора соединен с рукояткой, расположенной в перпендикулярной к предплечью оператора плоскости и обхватываемой им кистью руки.
Недостатком технического решения является фиксация предплечья оператора на удлиняемой ручке в виде подлокотника, ограничивающая использование руки для управления системами летательного аппарата, расположенными на бортовой панели кабины, невозможность смены рук при утомлении, затруднения при аварийном покидании летательного аппарата ввиду фиксации предплечья пилота.
Наиболее близкой является боковая кистевая ручка управления летательного аппарата (патент RU №2164878, МПК В64С 13/04, G05G 9/02 РФ, опубл. 10.04.2001 г), имеющая три вращательных степени свободы с несимметричной загрузкой и регулируемым демпфированием, выполненная с регулировочным сборочным узлом нейтрального положения рукоятки по всем трем осям вращения, две из которых проходят через сустав кисти руки летчика, а также с регулирующими сборочными узлами расстояния рукоятки от подлокотника ручки и от своих осей вращения, причем рукоятка посредством регулируемого сборочного узла закреплена на кронштейне, закрепленном на оси одного загрузочного узла, имеющего датчик угла поворота оси указанного узла, получившаяся сборка посредством другого кронштейна закреплена на оси другого загрузочного узла, также имеющего датчик угла поворота оси указанного узла, в свою очередь эта сборка закреплена через кронштейн на оси третьего загрузочного узла с датчиком угла поворота оси третьего узла, все это закреплено с помощью следующего кронштейна на подлокотнике, третья ось вращения рукоятки расположена под профилированным подлокотником ручки и максимально приближена к пятну контакта локтевого сустава руки летчика с подлокотником, прикрепленным через регулируемые сборочные узлы к боковой стенке кабины летательного аппарата, причем все регулируемые и регулировочные сборочные узлы ручки выполнены в виде подпружиненных шлицевых соединений.
Недостатком технического решения является то, что ручка управления, установленная на боковой стенке кабины, ограничивает возможность управления ею другой рукой и по этой причине не позволяет использовать зону кабины в близости от ручки управления для установки органов управления системами летательного аппарата, а в кабинах с двумя пилотами, утрату приобретенных рефлекторных навыков управления правой рукой, при обучении в качестве второго пилота, и потребности в переучивании на управление левой как капитана воздушного судна.
Задачей изобретения является разработка ручки интуитивного управления летательным аппаратом, позволяющей сократить сроки обучения летного состава, обеспечить приобретение устойчивых навыков управления и тем самым повысить безопасность полетов.
Техническим результатом является повышение точности и надежности управления, ускорение процесса обучения пилотов и повышение безопасности полетов.
Технический результат достигается при использовании ручки интуитивного управления летательным аппаратом, имеющей три вращательные степени свободы, выполненной с регулировочными узлами нейтрального положения рукоятки по всем трем осям вращения, две из которых проходят через сустав кисти руки летчика, каждый из которых включает датчик поворота, загрузочное устройство с нейтральным положением и демпфер, и закрепленной в кабине летательного аппарата при этом рукоятка расположена так, что ее геометрическая ось совпадает с продольной осью летательного аппарата и проходит через геометрический центр лучезапястного сустава руки летчика, а регулировочные узлы установлены на телескопической поворотной стойке, шарнирно закрепленной у стыка фронтальной панели и пола кабины между ног летчика.
Сущность конструкции ручки интуитивного управления летательным аппаратом заключается в том, что рукоятка устройства получает три вращательные степени свободы за счет трех регулировочных узлов, каждый из которых состоит из шарнира, объединенного с датчиком поворота, загрузочным устройством с нейтральным положением и демпфером, по всем трем осям вращения, проходящим через сустав кисти руки летчика. При этом геометрическая ось рукоятки в ее нейтральном положении совпадает с продольной осью летательного аппарата,
Ось шарнира, посредством которого рукоятка соединена с первым регулировочным узлом, совпадает с геометрической осью рукоятки, ось шарнира, второго регулировочного узла, перпендикулярна продольной вертикальной плоскости летательного аппарата, ось шарнира третьего регулировочного узла перпендикулярна горизонтальной плоскости летательного аппарата. Оси вращательных пар рукоятки и рычага, рычага и румпеля, румпеля и телескопической стойки пересекаются в кинематическом центре лучезапястного сустава пилота. Поскольку ось рукоятки в ее нейтральном положении выполнена совпадающей с продольной осью летательного аппарата, рукоятка в кисти руки пилота воспринимается им ассоциативно как сам летательный аппарат, который он направляет в выбранную точку пространства с необходимым креном.
Расположение рукоятки управления так, что ее геометрическая ось совпадает с продольной осью летательного аппарата, позволяет, сохранив за ней функцию управления креном (за счет вращения рукоятки вокруг собственной оси), функцию управления тангажом (при повороте рукоятки вокруг поперечной горизонтальной оси летательного аппарата), добавить функцию управления курсом (при повороте рукоятки вокруг поперечной вертикальной оси летательного аппарата).
Таким образом, классическая ручка управления креном и тангажом превращается в единый трехстепенной орган управления креном, тангажом и курсом, направление движения которого синхронизированы с перемещением в полете самого летательного аппарата. Рукоятка в руке пилота приобретает функцию курсонаводчика, который он интуитивно с желаемым креном поворачивает в необходимом направлении. При этом ноги пилота не участвуют в процессе пилотирования и на них может быть возложена функция управления вооружением, вектором тяги двигателей, механизацией аэродинамических поверхностей.
Разворот консоли рукоятки к туловищу пилота позволяет совместить ось вращения рукоятки с кинематическим центром лучезапястного сустава пилота и увеличить длину биомеханического рычага, длина которого определяется расстоянием от лучезапястного сустава до удаленной от него точки контакта кисти пилота с рукояткой, обеспечивая точную, без искажений передачу биомеханических воздействий руки пилота на датчики электродистанционной системы управления.
Установка рукоятки управления на телескопической стойке, закрепленной у стыка фронтальной панели и пола кабины между ног пилота, позволяет выполнить регулировку установки рукоятки управления при естественном, удобном для пилота положении руки, способствующему снятию напряжения, утомляемости и при необходимости произвести смену рук на рукоятке при управлении вспомогательными агрегатами на бортовой панели кабины.
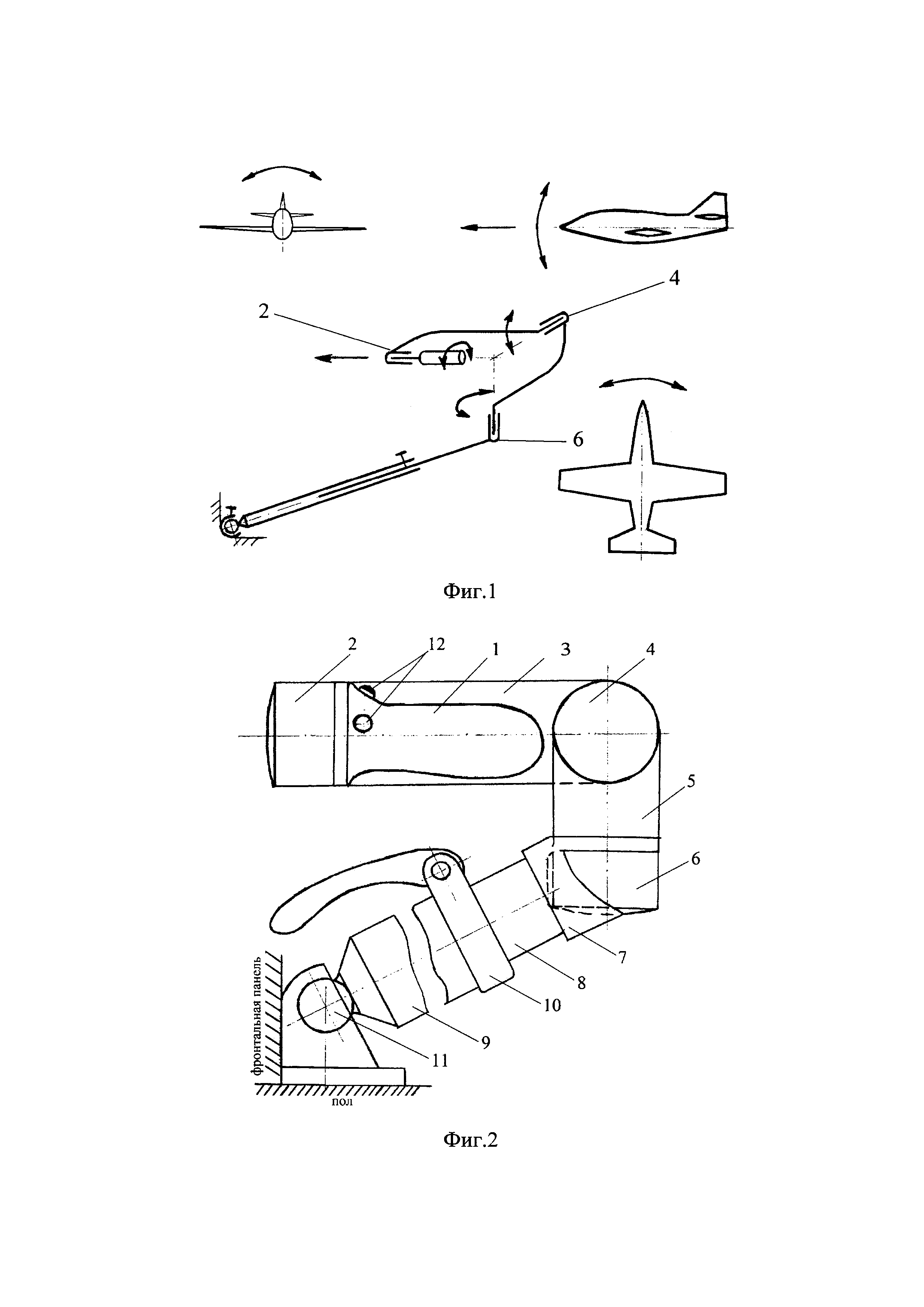
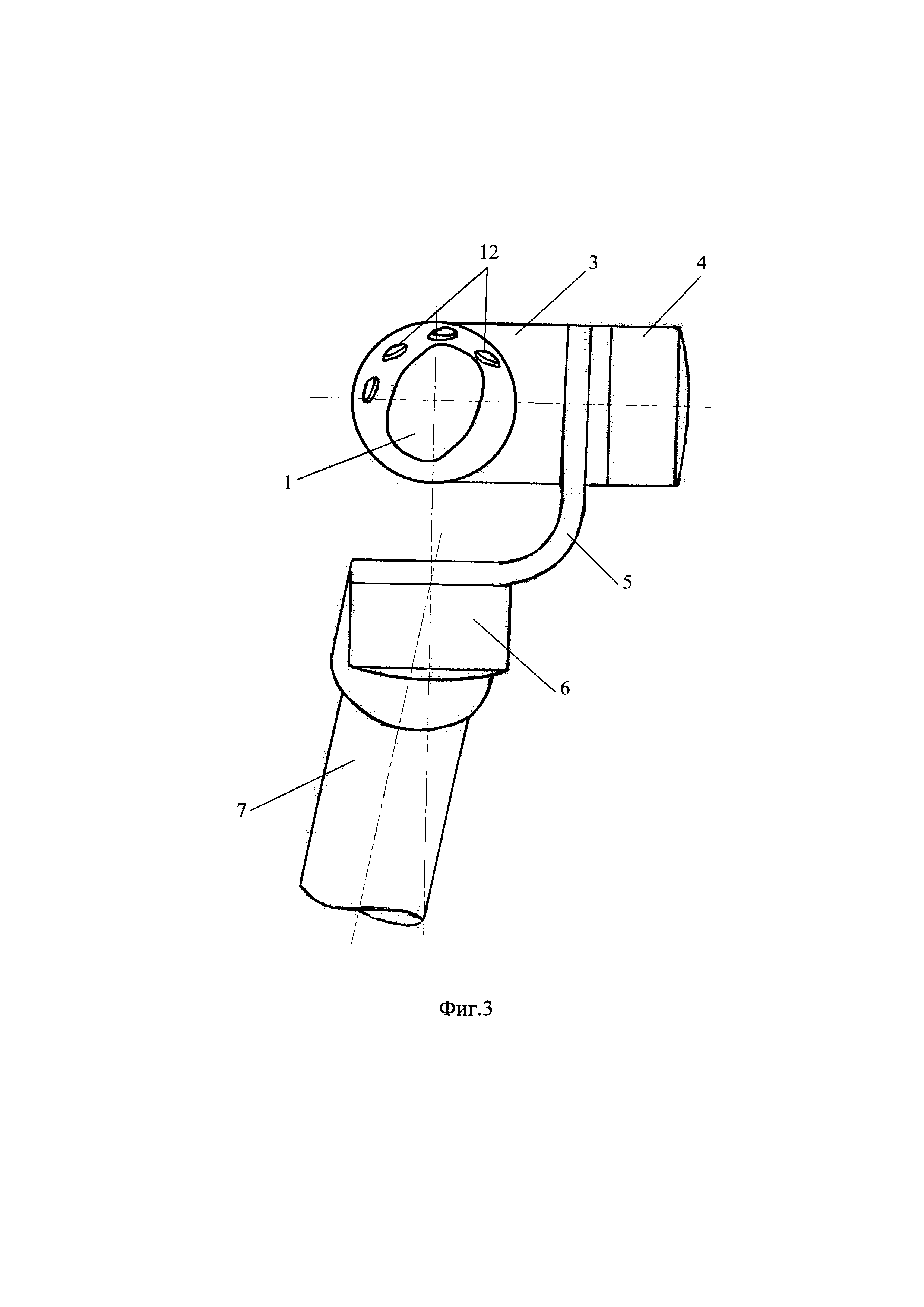
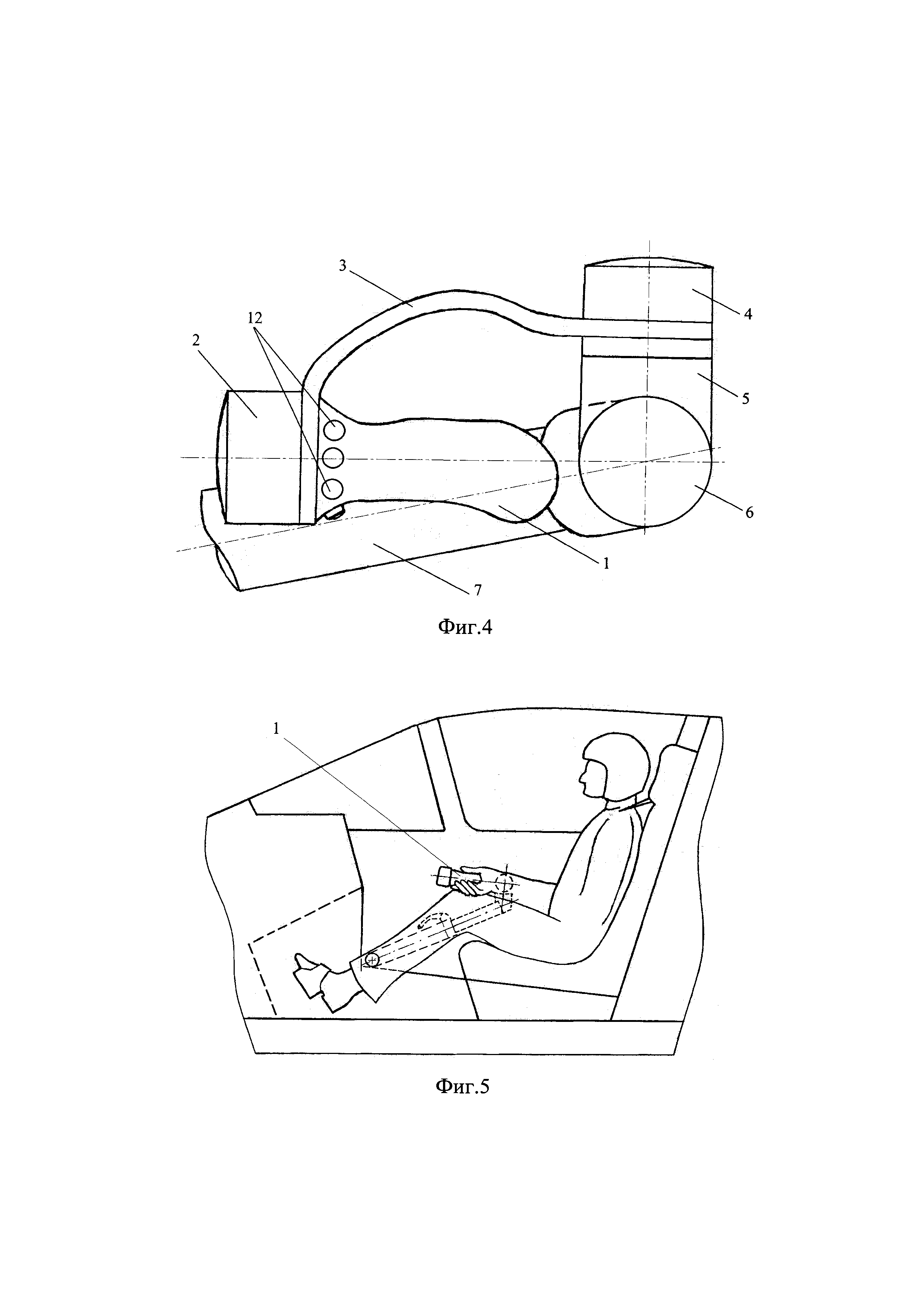
На фиг. 1 изображена кинематическая схема ручки интуитивного управления летательным аппаратом и воздействие ее регулировочных узлов на летательный аппарат, на фиг. 2 изображена ручка интуитивного управления летательным аппаратом, вид сбоку, на фиг. 3 изображена ручка интуитивного управления летательным аппаратом, вид сзади, на фиг. 4 изображена ручка интуитивного управления летательным аппаратом, вид в плане, фиг. 5 расположение ручки интуитивного управления в кабине летательного аппарата.
Ручка интуитивного управления летательным аппаратом состоит из рукоятки 1, посредством регулировочного узла 2, состоящего из шарнира, объединенного с датчиком поворота, загрузочным устройством с нейтральным положением и демпфером, соединенной с рычагом 3, который посредством регулировочного узла 4, состоящего из шарнира, объединенного с датчиком поворота, несимметричным загрузочным устройством с нейтральным положением и демпфером, соединен с румпелем 5. Румпель 5 посредством регулировочного узла 6, состоящего из шарнира, объединенного с датчиком поворота, загрузочным устройством с нейтральным положением и демпфером, соединен с телескопической поворотной стойкой 7, состоящей из штока 8, направляющей 9 и фиксатора 10. Телескопическая поворотная стойка 7 с расположенными на ней регулировочными узлами 2, 4 и 6 посредством сферического шарнира 11 с радиальным штифтом установлена у стыка фронтальной панели и пола кабины между ног летчика, обеспечивая регулирование положения рукоятки 1 относительно тела пилота в продольном направлении и по высоте.
Все три оси вращения регулировочных узлов 2, 4 и 6 проходят через сустав кисти руки летчика, а рукоятка расположена так, что ее геометрическая ось совпадает с продольной осью летательного аппарата и проходит через геометрический центр лучезапястного сустава руки летчика.
В основании рукоятки 1 могут располагаться кнопки 12 для управления вспомогательными системами летательного аппарата, например, вооружением.
Ручка интуитивного управления работает следующим образом: по завершению посадки в кресло, пилот, отжав рычаг фиксатора 10 от направляющей 9 стойки 7 и, тем самым, сделав податливым сферический шарнир 11 у основания стойки 7 и саму телескопическую поворотную стойку 7, обхватывает рукой рукоятку 1 ручки интуитивного управления, вытягивает ее на удобное для руки расстояние, укладывает ее стойку на бедро ноги (регулировка положения рукоятки 1 относительно тела пилота в продольном направлении и по высоте) и удостоверившись в удобстве расположения рукоятки 1, датчики крена, тангажа и курса которой находятся в нейтральном положении, прижимает рычаг фиксатора 10 к стойке 7, фиксируя положение рукоятки 1.
Вращение рукоятки 1 относительно ее геометрической оси и соответственно продольной оси летательного аппарата обеспечивает крен в соответствующем направлении, посредством регулировочного узла 2. Отклонение рукоятки 1 вниз или вверх по направлению движения, соответственно, посредством регулировочного узла 4 обеспечивает пикирование или кабрирование летательного аппарата. Разворот рукоятки 1 налево или направо по направлению движения, обеспечивает соответствующий разворот летательного аппарата по курсу, посредством регулировочного узла 6.
При движении летательного аппарата, поворот рукоятки 1 влево от нейтрального положения приводит к появлению сигнала на датчике курса, усилению его и, с помощью исполнительного механизма и руля поворота, повороту летательного аппарата влево. При этом поворот осуществляется пропорционально повороту рукоятки. Поворот рукоятки вправо от нейтрального положения приводит к пропорциональному повороту направления вправо и движению в этом направлении летательного аппарата.
Поворот рукоятки 1 вверх от нейтрального положения приводит к появлению сигнала на датчике тангажа, усилению его и, с помощью исполнительного механизма и руля высоты, кабрированию летательного аппарата. Поворот рукоятки вниз от нейтрального положения ведет к пикированию летательного аппарата.
Поворот рукоятки управления против часовой стрелки от нейтрального положения приводит к появлению сигнала на датчике крена, усилению его и, с помощью исполнительного механизма, отклонению элеронов, вызывающих левый крен летательного аппарата, а поворот рукоятки по часовой стрелке правый крен.
В полете пилот интуитивно поворачивает рукоятку 1 как указку, курсор, пульт дистанционного управления или макет летательного аппарата в нужном направлении и с необходимым креном, при этом совместная работа каналов электродистанционной системы обеспечивает движение летательного аппарата так, как будто в руке пилота не рукоятка управления, а сам летательный аппарат.
При утомлении руки или необходимости выполнить иные операции, пилот имеет возможность перехватить рукоятку другой рукой (при необходимости, подрегулировав ее положение, изменив положение стойки).
Заявленная ручка интуитивного управления летательным аппаратом, в отличие от традиционных, работающих по принципу условного управления, где, например, для самолетов обусловлено, что управление креном осуществляется поперечным наклоном рукоятки, управление тангажом - продольным наклоном рукоятки, а управление курсом осуществляется разворотом ногами педалей, установленных на коромысле, причем в обратном по отношению к курсу направлении, является курсонаводчиком, вызывающим перемещения летательного аппарата в направлении, указанном пилотом посредством рукоятки управления относительно кабины. При этом, манипуляции пилота с рукояткой соответствуют движениям руки или макета летательного аппарата при совершении пилотом эволюций в процедуре «пеший по летному». Это фактически исключает процесс запоминания управленческих функций, ускоряет приобретение навыков управления и, в сочетании с регулируемой стойкой, обеспечивающей снижение утомляемости благодаря комфортной посадке летчика и естественному положению руки, возможностью смены рук, способствует повышению надежности управления и безопасности полета, высвобождает ноги пилота для выполнения иных функций, сокращает сроки обучения летного контингента.
Таким образом, ручка интуитивного управления летательным аппаратом обеспечивает повышение точности и надежности управления, ускорение процесса обучения пилотов и приобретение ими практических навыков, снижение утомляемости и напряжения и соответственно повышение безопасности полетов.
Реферат
Полезная модель относится к области авиации, космонавтики, мореплавания, пилотируемых и беспилотных летательных аппаратов и подводных судов, систем дистанционного наведения оружия на цель, в частности, средствам ручного электродистанционного управления летательными аппаратами.Технический результат достигается при использовании ручки интуитивного управления летательным аппаратом, имеющей три вращательные степени свободы, выполненной с регулировочными узлами нейтрального положения рукоятки по всем трем осям вращения, две из которых проходят через сустав кисти руки летчика, каждый из которых включает датчик поворота, загрузочное устройство с нейтральным положением и демпфер, и закрепленной в кабине летательного аппарата, при этом рукоятка расположена так, что ее геометрическая ось совпадает с продольной осью летательного аппарата и проходит через геометрический центр лучезапястного сустава руки летчика, а регулировочные узлы установлены на телескопической поворотной стойке, шарнирно закрепленной у стыка фронтальной панели и пола кабины между ног летчика.Техническим результатом является повышение точности и надежности управления, ускорение процесса обучения пилотов и повышение безопасности полетов.
Комментарии