Система определения положения педали - RU2576309C2
Код документа: RU2576309C2
Чертежи
Описание
Настоящее изобретение относится к системе определения (или контроля) положения педали согласно ограничительной части п.1 формулы изобретения.
Уровень техники
При езде на автомобилях, прежде всего на автомобилях с автоматической коробкой передач, часто возникает необходимость в формировании электрического переключающего сигнала в ответ на резкое нажатие на педаль в виде педали акселератора или педали управления подачей топлива. Таким путем при резком нажатии на педаль акселератора с целью обеспечить требуемое значительное ускорение автомобиля прежде всего должно происходить автоматическое переключение автоматической коробки передач на следующую более низкую ступень. Именно для этого и требуется подача соответствующего переключающего сигнала при нахождении педали в промежуточном положении между исходным и конечным положениями. Во избежание нежелательного переключения автоматической коробки передач на более низкую ступень в данном положении, т.е. в промежуточном положении, педали, в котором срабатывает электрическая точка переключения, должно также создаваться ощутимое для водителя механическое сопротивление, т.е. происходить явно ощутимое возрастание усилия на педали акселератора. Подобную точку переключения или подобные пределы переключения в промежуточном положении педали при этом называют также режимом “кик-даун” (переключением на понижающую передачу при нажатии на педаль акселератора до упора).
В DE 102005038750 А1 описано устройство для режима “кик-даун”, используемое на автомобиле в его узле акселератора со встроенным датчиком положения педали и имеющее установленную на опорном кронштейне, перемещаемую между своими исходным и конечным положениями педаль акселератора, а также имеющее по меньшей мере один направленно перемещающийся в осевом направлении в углублении педали или опорного кронштейна нажимной элемент с по меньшей мере одной рабочей кромкой. Такое устройство для режима “кик-даун” снабжено далее клиновым элементом, который установлен в указанном углублении с возможностью направленного перемещения в нем в осевом направлении и взаимодействует с нажимным элементом через по меньшей мере одно тело качения и который нагружен усилием по меньшей мере одной пружины сжатия, при этом по достижении педалью акселератора при нажатии на нее определенного положения нажимной элемент утапливается в углубление в осевом направлении и своей рабочей кромкой вытесняет по меньшей мере одно тело качения из поперечной канавки углубления в радиальном направлении к клиновой поверхности клинового элемента.
В DE 10010432 А1 описан элемент для режима “кик-даун”, используемый на автомобиле в его узле акселератора со встроенным датчиком положения педали и имеющий корпус и установленный в нем с возможностью направленного перемещения в осевом направлении против усилия возвратной пружины нажимной элемент, несущий два расположенных диаметрально друг против друга тела качения, которые при утапливании нажимного элемента в корпус в целях повышения сдвигающего усилия выдавливаются надавливающими кромками во взаимно противоположные стороны против усилия U-образно изогнутой листовой пружины, при этом такие тела качения установлены в расположенных диаметрально друг против друга опорных чашках, листовая пружина, имеющая две продолговатые упругие боковые части и соединяющую их между собой поперечную часть, этой своей поперечной частью зафиксирована на дне корпуса, а своими упругими боковыми частями с предварительным натягом прилегает к опорным чашкам таким образом, что при утапливании нажимного элемента в корпус тела качения надвигаются на обращенные друг от друга наружные стороны упругих боковых частей пружины, и надавливающие кромки образованы на торцевых концах упругих боковых частей пружины.
Из DE 19918119 А1 известна система определения положения педали, установленной на шасси автомобиля и перемещаемой между своими исходным и конечным положениями. При нахождении педали в промежуточном положении между ее исходным и конечным положениями она отжимается нагружающим ее возвратным пружинным механизмом в направлении своего исходного положения. Подобная система определения положения педали имеет далее механизм изменения усилия.
Из DE 102004060482 А1 известен элемент для режима “кик-даун”, используемый с датчиком положения педали акселератора. Такой элемент имеет держатель и установленный подвижно относительно него корпус, при этом между держателем и корпусом предусмотрен механизм для скачкообразного изменения усилия, состоящий из первого рычага и второго рычага с соответствующими им первой и второй нажимными поверхностями, которые имеют различающиеся между собой контуры.
Краткое изложение сущности изобретения
Преимущества изобретения
Предлагаемая в изобретении система определения (или контроля) положения педали имеет подвижную между своими исходным и конечным положениями педаль в виде педали акселератора или педали управления подачей топлива, предпочтительно опору для педали и пружину, прикладывающую к педали возвращающее усилие в направлении ее исходного положения и способную прикладывать к педали в ее промежуточном положении между ее исходным и конечным положениями большее возвращающее усилие в направлении ее исходного положения, чем до и/или после этого ее промежуточного положения, при этом такое большее возвращающее усилие пружины создается в результате контакта ее первого участка с ее вторым участком. В промежуточном положении педали создается большее возвращающее усилие или происходит скачкообразное изменение возвращающего усилия, прикладываемого пружиной к педали в виде педали акселератора. Большее возвращающее усилие создается при этом вследствие контакта между первым и вторым участками пружины, соответственно возникает по этой причине, благодаря чему система определения положения педали имеет конструктивно простое исполнение при малом количестве деталей, поскольку скачкообразное изменение (возвращающего) усилия может обеспечиваться, соответственно большее возвращающее усилие может создаваться исключительно пружиной без необходимости применения в этих целях дополнительных деталей для скачкообразного изменения усилия или для создания большего возвращающего усилия. Промежуточное положение педали представляет собой при этом определенное ее положение в пределах всей длины ее хода или интервал ее положений в пределах всей длины ее хода. При установке педали, например, с возможностью поворота вокруг соответствующей оси промежуточное положение педали соответствует либо ее определенному углу поворота, либо интервалу ее углов поворота, например, в пределах 5° или 10°. Пружина представляет собой пружину для режима “кик-даун”, которая только в частичном интервале положений педали в пределах всей длины ее хода между ее исходным и конечным положениями прикладывает к ней возвращающее усилие, при этом такой частичный интервал положений педали в предпочтительном варианте ограничен ее конечным положением или находится вблизи него, в соответствии с чем в интервале положений педали у ее исходного положения пружина не прикладывает или не способна прикладывать к педали возвращающее усилие.
В одном из вариантов система определения положения педали имеет по меньшей мере одну возвратную пружину, а предпочтительно две возвратных пружины, которая/которые прикладывает/прикладывают к педали возвращающее усилие в направлении ее исходного положения для ее перемещения в это исходное положение. По меньшей мере одна возвратная пружина во всех положениях педали между ее исходным и конечным положениями прикладывает к ней возвращающее усилие. В отличие от этого пружина в качестве пружины для режима “кик-даун” прикладывает к педали возвращающее усилие только в частичном интервале ее положений, прежде всего в частичном интервале ее положений, который ограничен ее конечным положением или находится вблизи него. Основная задача данной пружины состоит, таким образом, не в перемещении педали в ее исходное положение, а в создании большего возвращающего усилия, соответственно в скачкообразном изменении усилия в промежуточном положении педали при ее нахождении в положениях вблизи ее конечного положения.
В дополнительном варианте создание или развитие большего возвращающего усилия возможно исключительно пружиной.
В одном из вариантов система определения положения педали не имеет кроме пружины никаких дополнительных деталей, никакого механизма или никакой кинематической связи для создания большего возвращающего усилия, при этом наличие по меньшей мере одной возвратной пружины в данном случае преимущественно не учитывается.
В еще одном варианте геометрией пружины в промежуточном положении обусловлена ее дополнительная деформация, которой в свою очередь обусловлено создание большего возвращающего усилия и которая при этом представляет собой деформацию, отличную от деформации пружины при ее перемещении вне пределов промежуточного положения. Дополнительная деформация пружины представляет собой при этом ее добавочную деформацию, возникающую в дополнение по причине перемещения педали, соответственно перемещения пружины. Дополнительная деформация пружины возникает при этом исключительно в промежуточном положении педали, и поэтому дополнительная деформация, а тем самым и большее возвращающее усилие существуют только в промежуточном положении педали. Дополнительная деформация пружины представляет собой, например, деформацию пружины в зоне имеющейся у нее выпуклости и/или деформацию пружины на участке между имеющейся у нее выпуклостью и вторым концом.
В предпочтительном варианте контакт первого участка пружины с ее вторым участком является причиной появления сил трения, которыми в свою очередь обусловлено создание большего возвращающего усилия. При этом такие силы трения преимущественно вносят лишь частичный вклад в создание большего возвращающего усилия.
В одном из вариантов пружина кинематически связана с педалью, вследствие чего при перемещении педали происходит относительное перемещение между первым участком пружины и ее вторым участком.
В дополнительном варианте геометрией пружины при контакте и относительном перемещении между ее первым участком и вторым участком обусловлена дополнительная деформация пружины, которая тем самым представляет собой упругую кинематическую связь.
В предпочтительном варианте дополнительная деформация пружины представляет собой ее изгибание.
В дополнительном варианте при нахождении педали в положении между ее исходным и промежуточным положениями отсутствует контакт между первым и вторым участками пружины и/или при нахождении педали в промежуточном положении существует контакт между первым и вторым участками пружины и/или при нахождении педали в положении между промежуточным и конечным положениями существует или отсутствует контакт между первым и вторым участками пружины.
Педаль прежде всего механически связана с пружиной кинематической связью или механизмом и/или установлена с возможностью поворота вокруг соответствующей оси. При этом в предпочтительном варианте поворотное движение педали преобразуется кинематической связью или механизмом в поступательное движение компонента, прежде всего цилиндра, кинематической связи или механизма. Такой компонент кинематической связи или механизма, прежде всего цилиндр, в предпочтительном варианте при этом прилегает к пружине и передает возвращающее усилие на педаль. Помимо этого кинематическая связь или механизм в предпочтительном варианте характеризуется наличием передаточного отношения, благодаря которому педаль совершает большее или меньшее относительное движение, которое при этом находится в определенном соотношении с относительным движением пружины или компонента, прежде всего цилиндра, кинематической связи или механизма.
В одном из вариантов пружина представляет собой листовую пружину и/или пружина выполнена в основном в виде разомкнутого кольца с двумя концами, в зоне которых выполнены соответственно первый и второй участки пружины, и/или система определения положения педали имеет только одну пружину, при этом не учитывается возвратная пружина, в соответствии с чем система определения положения педали с одной пружиной и двумя возвратными пружинами имеет только одну пружину в качестве пружины для режима “кик-даун”. Первый участок и второй участок в предпочтительном варианте расположены при этом на таком расстоянии от соответствующего конца разомкнутого кольца, которое составляет менее 40%, 30%, 20% или 10% от его длины. Тем самым на указанное расстояние первый участок отстоит от первого конца разомкнутого кольца, а второй участок - от его второго конца. Подобное разомкнутое кольцо может при этом иметь различную геометрическую форму, например, наряду с приблизительно круглой формой может иметь и иную геометрию, например, квадратную, треугольную, предпочтительно с выпуклостями или выступающими частями. Тем самым в основном квадратное “кольцо” обычно представляет собой квадрат, который разомкнут в одном месте, в котором находятся оба конца квадратного “кольца”.
В еще одном варианте система определения положения педали имеет датчик, прежде всего электрический контакт, индуктивный датчик или фотоэлектрический барьер, для регистрации промежуточного положения педали. Такой датчик позволяет регистрировать нахождение педали в промежуточном положении и выдавать соответствующий сигнал, по которому блок управления, которым оснащен автомобиль, обеспечивает переключение автоматической коробки передач на одну или несколько следующих более низких ступеней.
Пружину целесообразно по меньшей мере частично, а предпочтительно полностью выполнять из металла, например, стали, алюминия или латуни.
В другом предпочтительном варианте пружина по меньшей мере частично, а прежде всего полностью выполнена из пластмассы.
В особенно предпочтительном варианте пружина снабжена волнистостью, прежде всего в части, расположенной между первым участком и вторым участком. Благодаря волнистости пружина требует меньшего монтажного пространства для ее размещения и/или снижается коэффициент жесткости пружины согласно закону Гука, т.е. благодаря этому пружина становится более гибкой.
В одном из предпочтительных вариантов пружина выполнена из двух частей с первой пружиной из пластмассы и второй пружиной в качестве дополнительной пружины из металла, например, стали, алюминия или латуни.
В еще одном варианте система определения положения педали имеет датчик положения педали, предназначенный для определения положения педали, на основании информации о котором блок управления управляет мощностью двигателя внутреннего сгорания.
Краткое описание чертежей
Ниже изобретение более подробно рассмотрено на примере одного из вариантов его осуществления со ссылкой на прилагаемые к описанию чертежи, на которых показано:
на фиг.1 - предельно упрощенный вид системы определения положения педали,
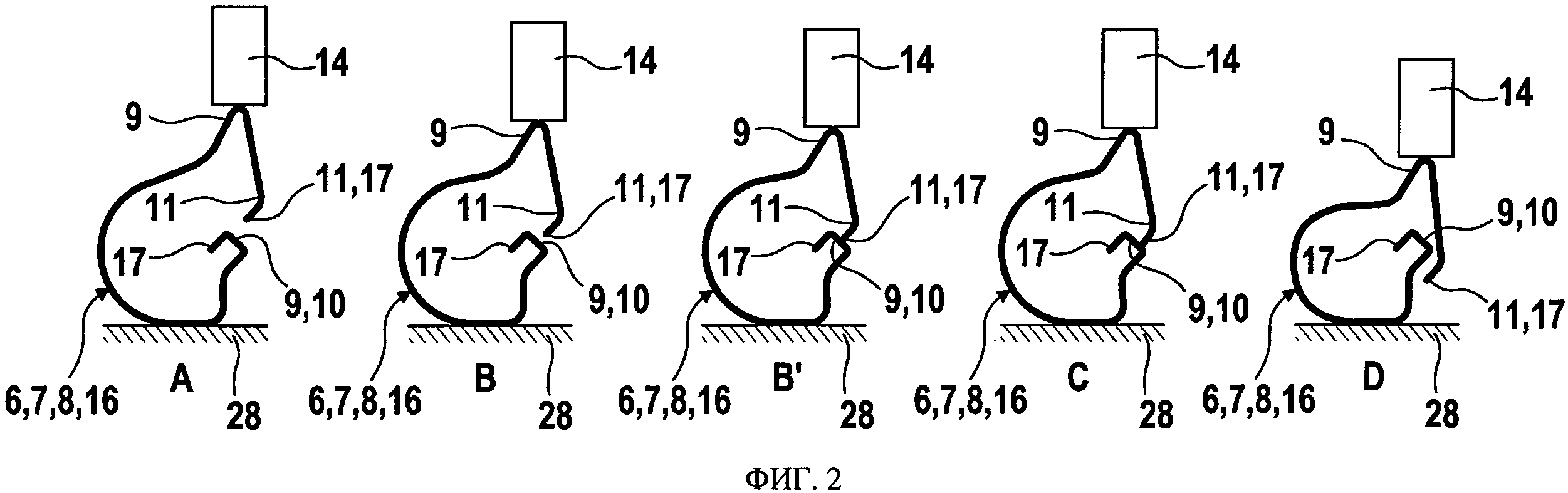
на фиг.2 - выполненная по первому варианту пружина и цилиндр в положениях A-D системы определения положения педали, изображенной на фиг.1,
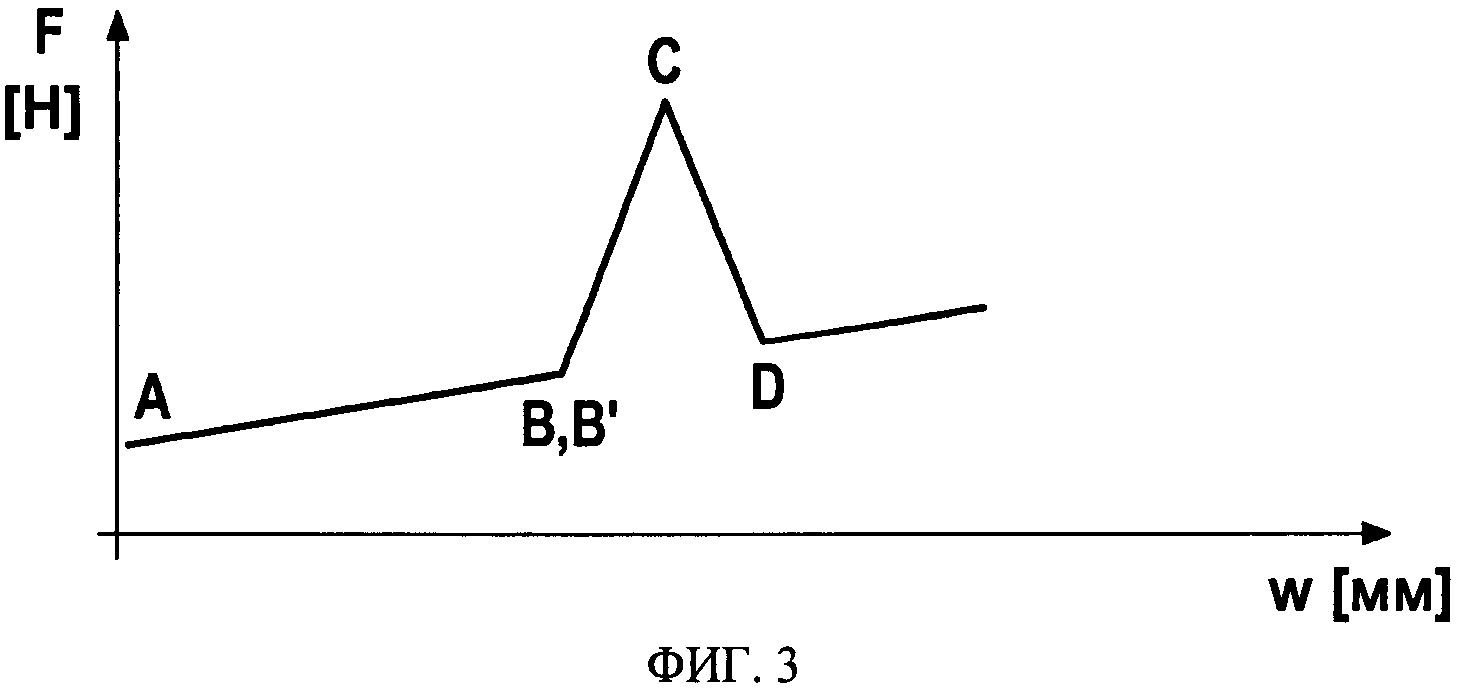
на фиг.3 - график зависимости возвращающего усилия пружины, изображенной на фиг.1 и 2, от хода поршня,
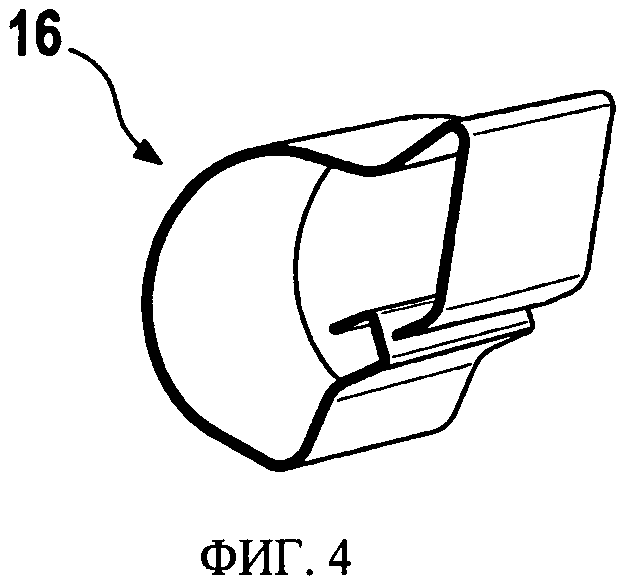
на фиг.4 - вид в аксонометрии пружины, изображенной на фиг.1 и 2,
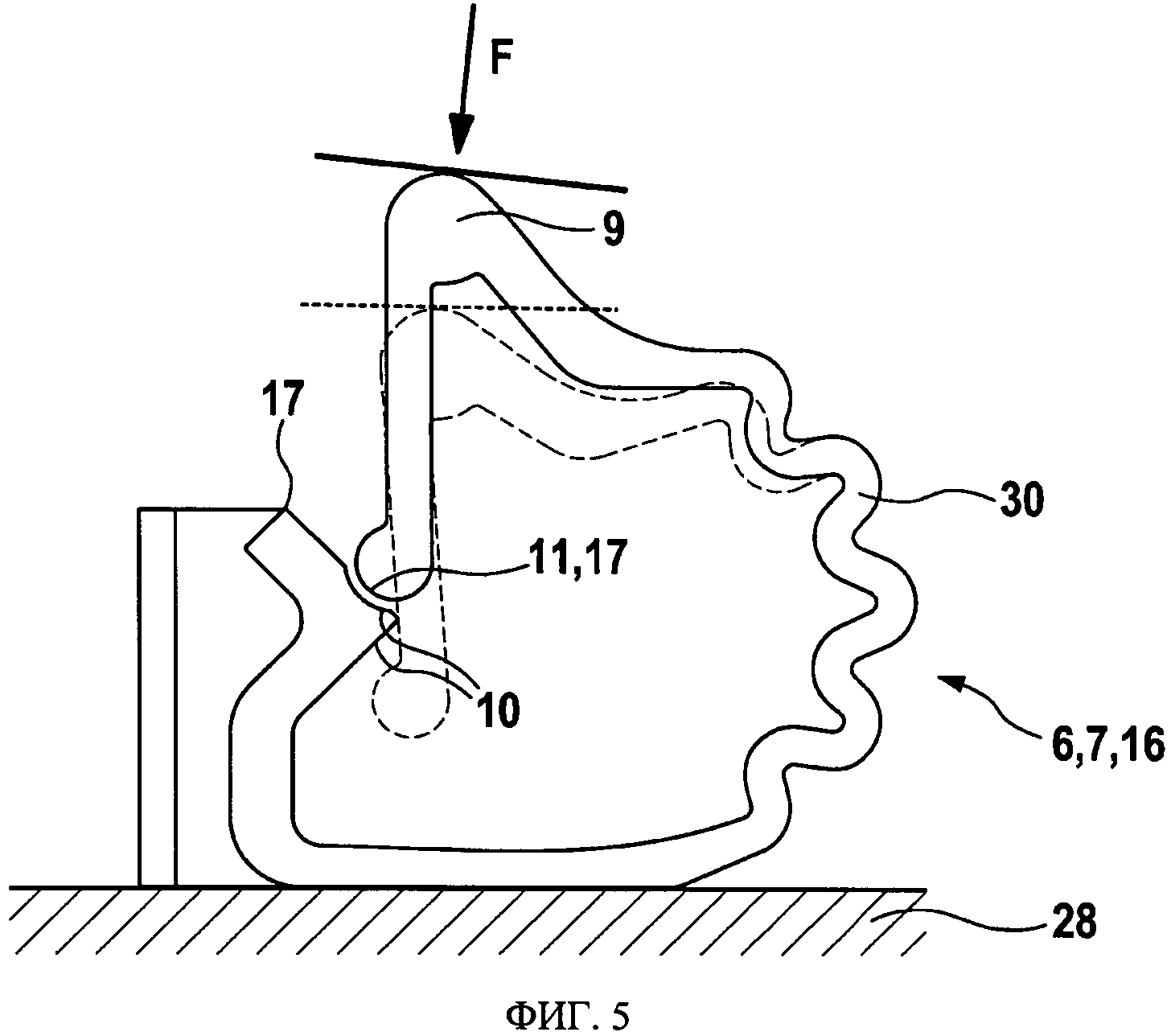
на фиг.5 - вид сбоку пружины, выполненной по второму варианту,
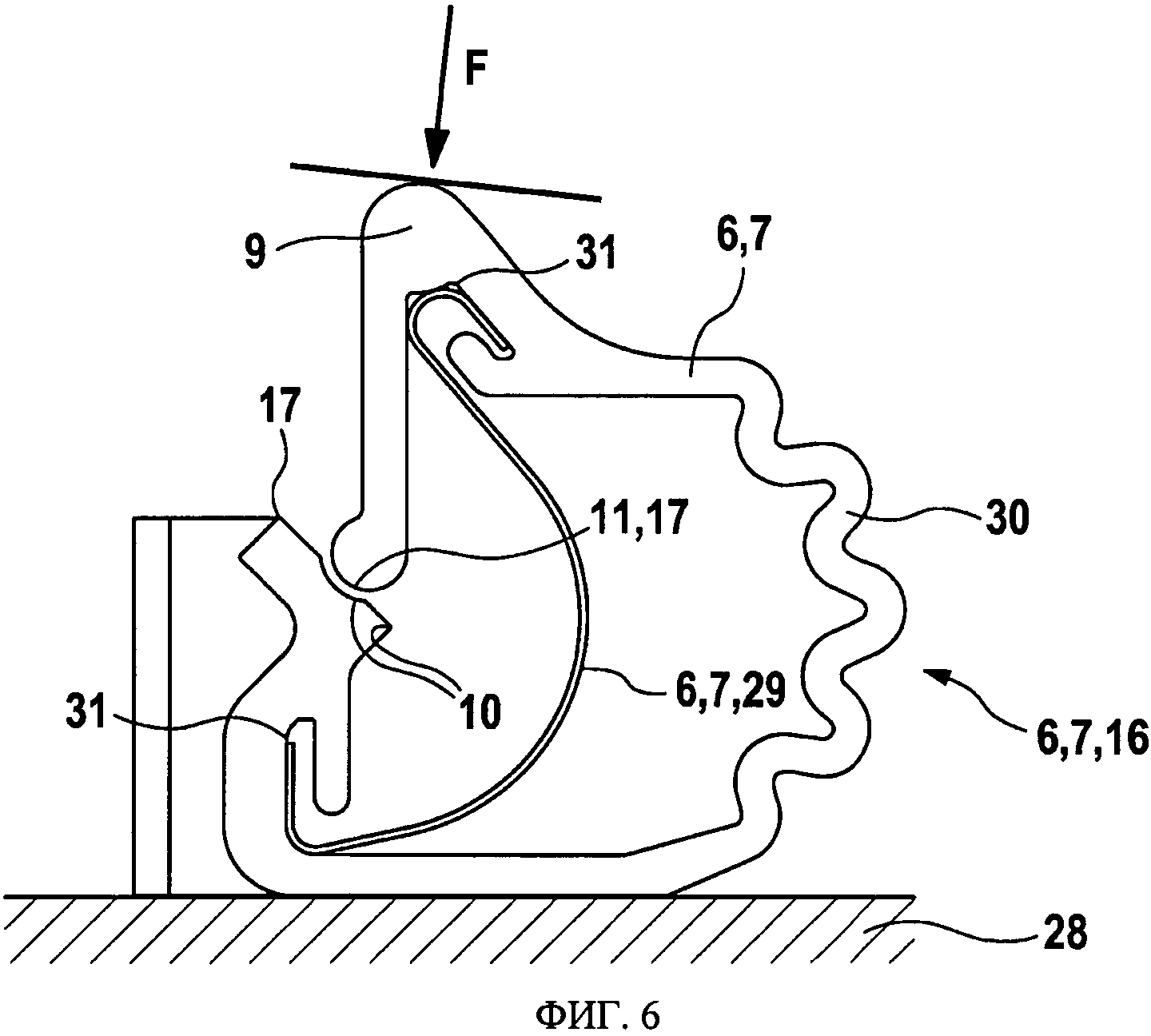
на фиг.6 - вид сбоку пружины, выполненной по третьему варианту,
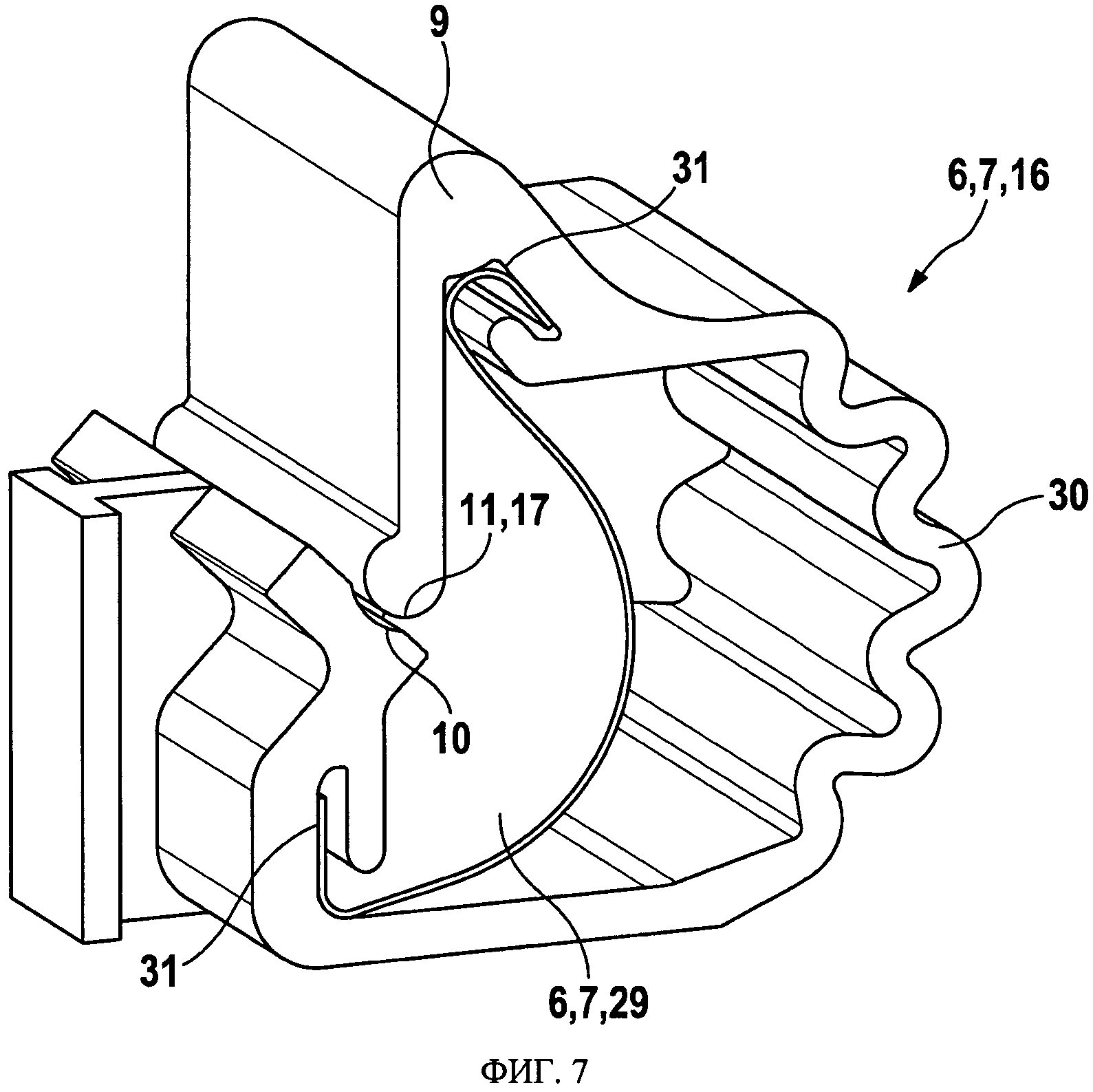
на фиг.7 - вид в аксонометрии пружины, изображенной на фиг.6, и
на фиг.8 - вид сбоку автомобиля.
Описание вариантов осуществления изобретения
Показанная на фиг.1 система 1 определения положения педали используется на автомобиле 27 (фиг.8), например, в сочетании с установленной на нем автоматической коробкой передач. При этом на педали 2 системы 1 определения ее положения в промежуточном положении педали между ее исходным и конечным положениями возникает большее возвращающее усилие, соответственно происходит скачкообразное изменение усилия, и это промежуточное положение педали 2 регистрируется системой 1 определения ее положения, в результате чего в таком промежуточном положении педали не показанным на чертеже блоком управления, которым оснащен автомобиль 27, может, например, инициироваться автоматическое переключение автоматической коробки передач на более низкую ступень.
Педаль 2 в виде педали акселератора или педали управления подачей топлива установлена на подшипнике 3, выполненном в виде подшипника 4 скольжения, с возможностью поворота вокруг оси 5. Подшипник 3 педали 2 при этом закреплен на шасси 26 автомобиля 27. Педаль 2 может поворачиваться вокруг оси 5 между своим конечным положением, в котором она показана на фиг.1, и своим исходным положением, в котором она показана на фиг.1 штриховой линией. Между своими конечным и исходным положениями педаль 2 может далее занимать также промежуточное положение. При нахождении педали 2 в ее показанном на фиг.1 конечном положении к ней не изображенной на чертеже ногой водителя автомобиля 27 прикладывается некоторое усилие, которым преодолевается возвращающее усилие пружины 6, действующей на педаль 2. Система 1 определения положения педали имеет две не показанные на чертеже возвратные пружины, которые перемещают педаль в ее исходное положение и возвращающее усилие которых также должно преодолеваться ногой водителя. При этом в конечном положении педали от не показанного на чертеже двигателя внутреннего сгорания, которым оснащен автомобиль 27, требуется развитие максимально возможной мощности, а в исходном положении педали - минимальной мощности. При отпускании педали 2 водителем автомобиля 27 она под действием возвращающего усилия, прикладываемого к ней не показанными на чертеже возвратными пружинами, вновь возвращается в свое исходное положение (изображенное штриховой линией).
Пружина 6, которая в первом варианте (фиг.1 и 2) выполнена в виде листовой пружины 7 из металла, например, стали, алюминия или латуни, имеет в сечении согласно фиг.1 и 2 примерно форму, соответственно геометрию разомкнутого кольца 16. Такое разомкнутое кольцо 16, соответственно пружина 6 имеет при этом два конца 17. В зоне или вблизи этих своих концов 17 пружина 6 имеет первый участок 10 и второй участок 11. Помимо этого на первом участке 10 пружины 6 она выполнена в виде выпуклости 9. Подвижная педаль 2 может через кинематическую связь 12 или механизм 13 механически воздействовать на пружину 6. После перемещения педали 2 на определенное расстояние, соответственно после ее поворота на определенный угол из ее показанного на чертеже штриховой линией исходного положения затем при движении педали 2 происходит также относительное перемещение между первым участком 10 и вторым участком 11 пружины 6. Кинематическая связь 12 состоит при этом из поршня 14, установленного в цилиндре 15. Поршень 14 своим первым концом при этом прилегает к педали 2, а своим другим, противоположным этому концу концом прилегает к еще одной выпуклости 9 пружины 6 (фиг.1 и 2). При этом поршень 14 по причине его установки в цилиндре 15 совершает исключительно поступательное движение. Благодаря этому поворотное движение педали 2 вследствие подвижного опирания на нее поршня 14 преобразуется в его поступательное движение. Тем самым пружина 6 может через механизм 13 или кинематическую связь 12 прикладывать свое возвращающее усилие к педали 2.
На фиг.3 показан график, на котором по оси абсцисс отложен ход w поршня 14, а по оси ординат отложено усилие F в качестве возвращающего усилия. Возвращающее усилие, таким образом, представляет собой возвращающее усилие, прикладываемое пружиной 6 к поршню 14. Усилие, прикладываемое к педали 2 обеими не показанными на чертеже возвратными пружинами, на фиг.3 не представлено. Ход w поршня 14 указан при этом в миллиметрах (мм), а усилие F в качестве возвращающего усилия указано в Ньютонах (Н). Между положениями A и B поршня 14, а тем самым, как следствие этого, и педали 2 к поршню 14 прикладывается только возвращающее усилие, которое на участке между положениями A и B возрастает линейно в зависимости от хода w прямо пропорционально ему. Положение A представляет собой положение педали 2 между ее показанным штриховой линией исходным положением и конечным положением и соответствует при этом положению, по достижении которого педаль 2 прошла, например, уже примерно 80% от своего максимально возможного хода между своими исходным и конечным положениями. При нахождении педали 2 в положении между исходным положением и положением A отсутствует контакт между поршнем 14 и пружиной 6 (не показано на фиг.2 и 3). Между положениями B и D возникает большее возвращающее усилие, соответственно происходит скачкообразное изменение усилия, прикладываемого пружиной 6 к педали 2. Положение B представляет собой, таким образом, положение педали 2, соответственно поршня 14 до промежуточного положения, а положение D представляет собой положение педали 2, соответственно поршня 14 после ее/его промежуточного положения. При нахождении поршня 14, соответственно педали 2 в положении C большее возвращающее усилие, соответственно скачкообразно изменившееся усилие достигает максимальной величины. При последующем перемещении педали 2 после промежуточного положения в направлении конечного положения после положения D вновь создается только прямо пропорционально возрастающее возвращающее усилие.
При возвратном перемещении педали 2 из конечного положения в положение A также происходит скачкообразное изменение усилия, которое, однако, в зависимости от конструктивного исполнения участков 10 и 11 пружины 6 чаще всего имеет меньшую величину и происходит в противоположном направлении. При возвратном перемещении педали 2 второй участок 11 пружины несколько зависает, зацепляясь за ее первый участок 10. Однако такое зависание является лишь настолько слабым, что сохраняется возможность надежного возврата пружины 6 в положение А. Педаль 2 может независимо от пружины 6 перемещаться в ее представленное штриховой линией исходное положение по меньшей мере одной, не показанной на чертеже возвратной пружиной. Обычно по соображениям безопасности система 1 определения положения педали имеет две возвратные пружины (не показаны).
Незначительное зависание педали 2 ощущает нажимающий на нее водитель. Такое незначительное зависание педали может использоваться для подачи осязательного сигнала водителю. Такой сигнал может, например, служить для информирования водителя о предстоящем переключении передачи в не показанной на чертеже коробке передач. В этом случае водитель может принять решение о том, следует ли ему еще несколько отпустить педаль и тем самым допустить переключение передачи или нет.
На фиг.2 соответственно указанным на фиг.3 положениям A-D представлена форма, соответственно геометрия, которую выполненная по первому варианту пружина 6 принимает при нахождении педали 2, соответственно поршня 14 в данных положениях. В положениях A и B отсутствует контакт между первым участком 10 пружины 6, имеющим вид выпуклости 9, и вторым участком 11 пружины 6. Тем самым создаваемое пружиной 6 возвращающее усилие между положениями A и B обусловлено в основном ее деформацией на приблизительно дугообразном участке, который согласно изображению на фиг.2 расположен слева от первого участка 10 пружины и ниже выпуклости 9, к которой прилегает поршень 14. Пружина 6 закреплена на и расположена в корпусе 28, который показан на фиг.2 лишь в предельно упрощенном виде и внутри которого при этом размещена также кинематическая связь 12. Положение B педали 2, соответственно поршня 14 соответствует положению незадолго до вхождения второго участка 11 пружины в контакт с ее первым участком 10. В положении B′ происходит контакт между вторым участком 11 пружины 6 и ее первым участком 10, в результате чего при дальнейшем перемещении после положения B′ в направлении положения C второй участок 11 пружины из-за наличия определенной геометрии у выпуклости 9 на первом участке 10 деформируется в плоскости чертежа по фиг.2 вправо, а первый участок 10 преимущественно незначительно деформируется влево для возможности дальнейшего перемещения педали 2 вниз. В результате пружина 6 из-за контакта между ее первым и вторым участками 10, 11 претерпевает дополнительную деформацию, которая обуславливает появление большего возвращающего усилия, соответственно скачкообразное изменение усилия. При дальнейшем перемещении педали 2, соответственно поршня 14 после положении C в направлении конечного положения происходит снижение большего возвращающего усилия, поскольку геометрией второго участка 11 пружины 6 обусловлена возможность упругого восстановления им своей формы. Таким путем после дальнейшего перемещения педали 2, соответственно поршня 14 в направлении конечного положения после положении D преодолевается большее возвращающее усилие, соответственно скачкообразное изменение усилия.
Система 1 определения положения педали снабжена далее устройством для регистрации промежуточного положения педали 2. С этой целью на педали 2 на несущем стержне 22 закреплена первая электрическая контакт-деталь 21 в качестве электрического контакта 19 и датчика 18. Вторая электрическая контакт-деталь 20 также в качестве электрического контакта 19 и датчика 18 при этом проводкой соединена с источником 23 тока, благодаря чему возможно наличие электрической цепи 24. В этой электрической цепи 24 расположен измеритель 25 тока. Лишь в промежуточном положении педали 2 создается механический, а тем самым и электрический контакт между первой контакт-деталью 20 и второй контакт-деталью 21. При этом электрическая цепь 24 замыкается и через нее начинает протекать ток. Сила этого тока может регистрироваться измерителем 25 тока, и тем самым в блок управления, установленный на автомобиле, может передаваться соответствующий сигнал. По этому переключающему сигналу, соответственно по сигналу, выдаваемому этим измерителем тока, автоматическая коробка передач автомобиля 27 может автоматически переключаться на следующую более низкую ступень.
На фиг.5 показана выполненная по второму варианту пружина 6. Такая пружина 6 в отличие от показанного на фиг.2 и 4 первого варианта выполнена не из металла, а из пластмассы, предпочтительно из термопласта. Кольцо 16 в одной своей части между первым участком 10 и вторым участком 11 имеет волнистость 30. Такая волнистость 30 снижает коэффициент жесткости пружины 6 согласно закону Гука.
Благодаря волнистости 30 пружины 6 достигается существенное снижение напряжения ее материала по сравнению с пружиной без подобной волнистости. В том случае, если по соображениям выносливости напряжение материала не должно превышать определенной величины, можно выполнить снабженную волнистостью 30 пружину 6 существенно меньших размеров, чем пружину без волнистости. Иными словами, пружина 6 с волнистостью 30 в целом требует меньше монтажного пространства для ее размещения, чем пружина без волнистости.
На фиг.6 показана выполненная по третьему варианту пружина 6. Такая пружина 6 в третьем варианте ее выполнения состоит из двух частей, а именно, из представленной во втором варианте пружины 6 в качестве первой пружины 6 из пластмассы и дополнительно к ней из дополнительной пружины 31 в качестве второй пружины 6 из металла, например, стали, алюминия или латуни. Дополнительная пружина 29 на каждом из обоих ее концов закреплена в выемках 31 на первой пружине 6. Дополнительная пружина 29 повышает возвращающее усилие состоящей из двух частей пружины 6 в положении C, благодаря чему создается большее максимальное возвращающее усилие. Помимо этого дополнительная пружина 29 может при необходимости использоваться для содействия возвратному перемещению педали из конечного положения в исходное положение. Первую пружину 6 из термопласта изготавливают в литьевой форме литьем под давлением. Для варьирования величины максимального возвращающего усилия, соответственно для варьирования коэффициента жесткости состоящей из двух частей пружины 6 в сочетании с неизменной первой пружиной 6 из пластмассы можно использовать различные закрепляемые на ней дополнительные пружины 29, что позволяет с использованием лишь различных дополнительных пружин 29 получать, соответственно изготавливать состоящие из двух частей пружины 6 с различающимися между собой параметрами.
В целом предлагаемая в изобретении система 1 определения положения педали обладает следующими существенными преимуществами. Такая система 1 определения положения педали имеет только одну пружину 6, которая способна создавать не только прямо пропорционально возрастающее возвращающее усилие, но и большее возвращающее усилие, соответственно обеспечивать скачкообразное изменение усилия, связанное с чем преимущество состоит в отсутствии необходимости использовать дополнительные детали или узлы, обеспечивающие скачкообразное изменение усилия на педали 2 около ее промежуточного положения.
Реферат
Изобретение относится к области транспортного машиностроения. Система определения положения педали для автомобиля имеет подвижную между своими исходным и конечным положениями педаль и пружину, которая имеет первый и второй участок. Пружина способна прикладывать к педали в ее промежуточном положении большее возвращающее усилие в направлении ее исходного положения, чем до и/или после этого промежуточного положения. Большее возвращающее усилие пружины создается в результате контакта ее первого участка с ее вторым участком. Геометрия пружины в промежуточном положении обусловлена ее дополнительной деформацией, которой в свою очередь обусловлено создание большего возвращающего усилия и которая представляет собой деформацию, отличную от деформации пружины при ее перемещении вне пределов промежуточного положения. Достигается увеличение возвращающегося усилия педали. 12 з.п. ф-лы, 8ил.
Формула
Документы, цитированные в отчёте о поиске
Подпружиненная подвеска для звукоизоляционных элементов
Комментарии