Сверлильный станок с одной головкой - RU2615369C2
Код документа: RU2615369C2
Чертежи








Описание
Настоящее изобретение относится к станку для деревообработки.
Более конкретно, станок согласно настоящему изобретению представляет собой сверлильный станок с одной головкой, относящийся к типу, который может быть использован для выполнения нескольких отверстий одновременно на деревянных элементах, предназначенных, например, для выполнения модульной мебели.
Сверлильный станок с одной головкой в соответствии с настоящим изобретением выполнен с электронно-программируемой системой сверления и оснасткой для улучшения качества сверления и снижения времени наладки станка.
Сверлильный станок приводится в действие полностью электрически, и, кроме того, работа и взаимосвязанные рабочие циклы не зависят от пневматической системы, как в традиционных станках.
Приводы состоят из электроприводов с цифровыми измерителями, обеспечивающими простое и правильное отображение значений на дисплеях, расположенных на передней эргономичной панели управления.
Сверлильная система выполнена с двигателем, размещенным в центре сверлильной головки для распределения равномерной рабочей нагрузки к шпинделям и для оптимального весового баланса.
Сверлильный блок состоит из корпуса головки, суппорта головки, каретки головки и гребенки. Сверлильная головка включает цилиндрические шпиндели с быстросъемными муфтами для быстрого и точного введения втулок, удерживающих сверло.
Цилиндрическая форма шпинделей подразумевает большую точность соединения между втулками, удерживающими сверла, и шпинделями.
Выбор длины сверла и установка параметров сверления управляются электронным образом и отображаются на дисплеях, расположенных на передней панели управления.
Суппорт сверлильной головки объединяет привод регулирования высоты сверлильной головки и крепежный фланец двигателя, таким образом, обеспечивая более связанную и компактную геометрию для уменьшения зазора и исключая любой возможный изгиб вала двигателя. Каретка головки установлена на подшипнике с циркулирующими шариками для большей точности сверления и минимального трения между движущимися частями; в дополнение, сверлильная система приводится в действие электроприводом, обеспечивающим параметры резания, настроенные в соответствии с типом требуемой обработки.
Перемещение сверлильной группы посредством электропривода обеспечивает операцию сверления с постоянной скоростью и, таким образом, более высокое качество конечного изделия.
Гребенка поддерживает сверлильную группу, которая вращается под углами от 0 до 90° и для промежуточных углов с помощью электронной системы с отображением параметров работы на дисплее, расположенном на передней панели управления. Эта система обеспечивает быстрый и точный наклон сверлильной группы в промежуточных или заданных углах.
Система электрического прижатия работает при помощи электронного управления, обеспечивающего более быструю обработку и лучший зажим заготовки, таким образом, обеспечивая более высокое качество сверления.
Все электронное управление расположено и отображается на дисплеях на передней панели управления.
Настоящий сверлильный станок имеет рабочую плоскость, прижимную группу и заднюю упорную группу в одной единой конструкции. Это позволяет увеличить качество и точность обработки этих элементов станка.
Эти и другие преимущества и признаки настоящего изобретения станут более понятными любому специалисту в области техники из последующего описания и со ссылкой на сопровождающие чертежи, приведенные в качестве примера, а не для ограничения смысла, на которых:
Фиг. 1 представляет собой схематичный вид в перспективе рабочей головки станка согласно настоящему изобретению, на котором введен только один инструмент, чтобы лучше показать конструкцию шпинделей;
Фиг. 2 представляет собой схематичный вид сверху рабочей головки, показанной на Фиг. 1, установленной на ее суппорт;
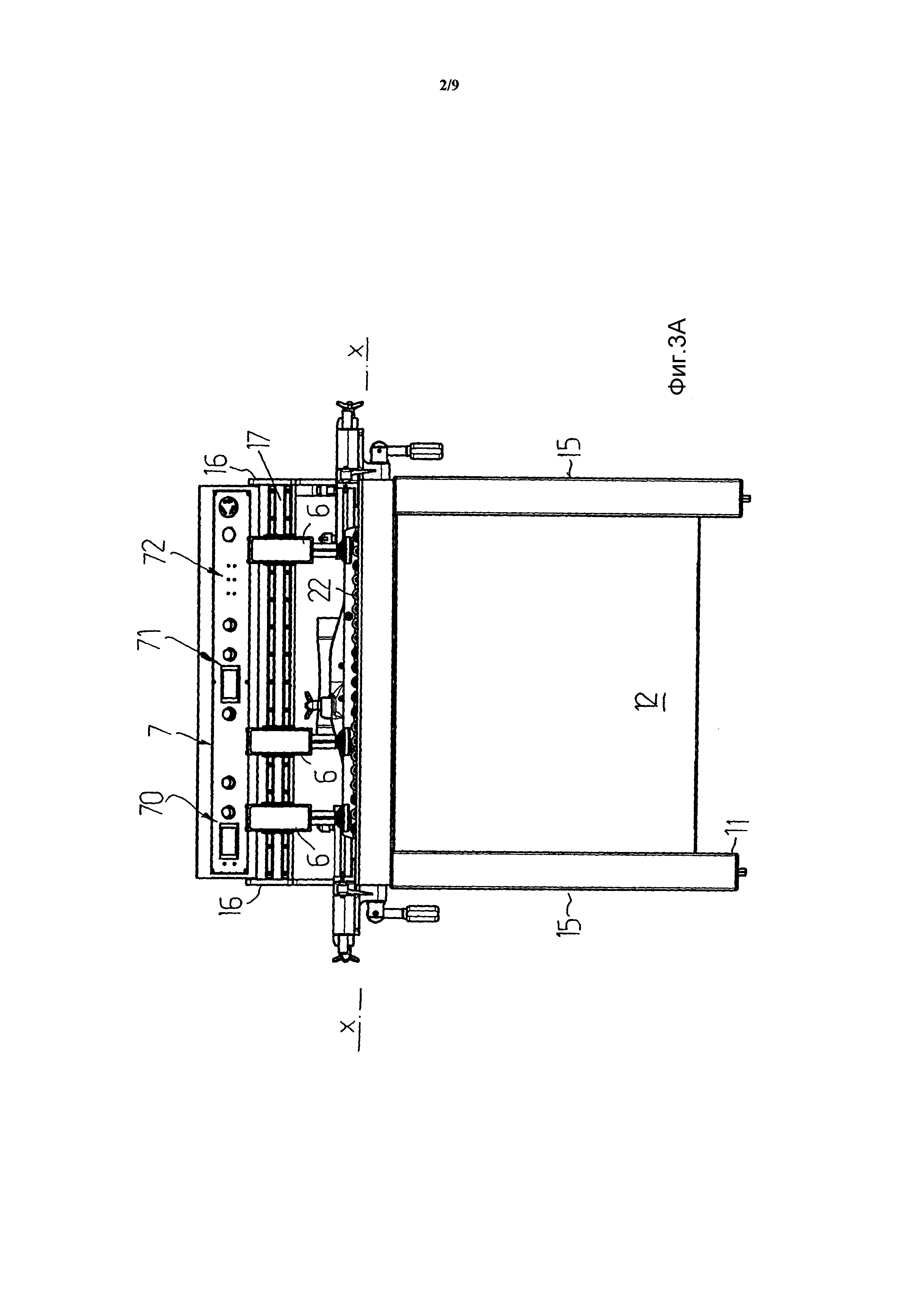
Фиг. 3A представляет собой схематичный вид спереди станка согласно настоящему изобретению;
Фиг. 3B показывает деталь прижимного элемента станка на Фиг. 3A, действующую на заготовке;
Фиг. 4 представляет собой вид снизу рабочей головки на Фиг. 1 и относительной группы суппорта и регулировки;
Фиг. 5 представляет собой схематичный вид сбоку станка, показанного на Фиг. 3A, с боковыми панелями, удаленными для лучшей иллюстрации внутренней части;
Фиг. 6 представляет схематичный вид в перспективе с задней стороны станка, показанного на Фиг. 3A и Фиг. 5;
Фиг. 7 представляет собой схематичный вид в перспективе спереди станка, показанного на Фиг. 5;
Фиг. 8 представляет собой схематичный разобранный вид станка, проиллюстрированного на предыдущих чертежах;
Фиг. 9 представляет собой упрощенную блок-схему, относящуюся к возможной системе управления станка согласно настоящему изобретению.
Сокращенная до ее существенной конструкции и со ссылкой на сопровождающие чертежи головка с одним сверлом для деревообработки в соответствии с настоящим изобретением содержит:
опорную конструкцию (1), на которой образована рабочая плоскость (10) на заданной высоте относительно участка (11) основания той же конструкции, которая имеет переднюю сторону или сторону (12) оператора и заднюю сторону (13) с регулируемыми боковыми упорами (14) на обеих сторонах указанной плоскости (10) и задними упорами (18), регулируемыми посредством винтовой рукоятки (19), установленной за плоскостью (10);
рабочую головку, имеющую коробчатую конструкцию с передней стороны (20) и задней стороны (21), которая на ее передней стороне имеет множество шпинделей (22), расположенных их соответствующими осями параллельно друг другу и компланарно, которые ориентированы перпендикулярно поверхности, ограничивающей переднюю сторону (20) головки (2), в каждый из которых может быть введен сверлильный инструмент (23);
электродвигатель (3), действующий одновременно на все шпиндели (22) с помощью передачи, расположенной внутри конструкции рабочей головки (2) (передача не видна на чертежах), размещен в центральном положении на задней стороне (21) рабочей головки (2) и установлен на каретке (30), которая, в свою очередь, движется по нижележащему опорному элементу (31), называемому на жаргоне «гребенкой», за счет того, что обеспечен выемками (32), параллельными осям шпинделей (22), которые придают этому элементу форму гребенки, шарнирно соединенной по горизонтальной оси (хх) на двух сторонах (15) конструкции (1);
средства регулирования положения двигателя (3) и головки (2), являющейся его неотъемлемой частью относительно гребенки (31), с линейным электроприводом (4), расположенным и действующим между кареткой (30) и гребенкой (31) и соединенным с соответствующими средствами управления (не показаны): посредством привода (4) каретка (30) выдвигается или втягивается на гребенке (31), таким образом, регулируя программой положение головки (2) и далее шпинделей (22) относительно гребенки (31) согласно выполняемым определенным сверлениям;
второй линейный электропривод (5), контролируемый программой, размещенный внутри конструкции (1) в положении под рабочей плоскостью (10), который на одной стороне (50) соединен с неподвижной частью этой же конструкции (1), а на другой стороне (51) соединен с нижней или вентральной поверхностью гребенки (31): посредством привода (5) гребенка (31) и с ней рабочая головка (2) с соответствующим двигателем (3) вращается вокруг указанной оси (х-х);
множество электрических прижимов (6), имеющих вертикальную ось с соответствующими прижимными элементами (60), соединенными с горизонтальной штангой (17), расположенной выше рабочей плоскости (10) и на заданном расстоянии (d) от стороны оператора той же плоскости, причем указанная штанга (17) поддерживается двумя U-образными рычагами (16), закрепленными на сторонах конструкции (1);
панель (7), на которую подаются команды, используемые оператором для приведения в действие двигателя (3), привода (4), привода (5) и зажимов (6): на прилагаемых чертежах команды, размещенные на панели (7) для привода (4), который управляет положением каретки (30), обозначены ссылочной позицией «70», команды для привода (5), который управляет вращением гребенки (31), обозначены ссылочной позицией «71», и команды, предназначенные для приведения в действие прижимных элементов (6), обозначены ссылочной позицией «72».
Гребенка (31) ограничена на обеих сторонах (15) конструкции (1) посредством горизонтальных штифтов (33), проходящих в отверстиях (101, 34), обеспеченных соответственно на указанных сторонах (15) за плоскостью (10) и на двух боковых концах гребенки (31). Оси указанных штифтов (33) лежат вдоль оси (хх), указанной выше.
Штанга (17) выполнена с пазами (170), к которым можно зацеплять зажимы (6), которые для этой цели обеспечены сзади соединительными пластинами (61) с пазами. Таким образом, каждый из прижимов (6) может скользить вдоль штанги (17) и свободно располагаться, где требуется.
Так как привод (4), привод (5) и прижимные элементы (6) работают от электричества, это дает возможность программировать их работу в соответствии с выполняемыми определенными операциями обработки, таким образом, исключая сложность управлений и регулирований станков, в которых такие устройства относятся к пневматическому типу.
Для выполнения сверления отверстий оператор, использующий средства управления, обеспеченные на панели (7), как только заготовка располагается на поверхности (10), с возможным использованием упоров (14) и/или (18), управляет действием прижимов (6), которые блокируют заготовку, срабатыванием привода (5), который вращает гребенку (31) вокруг оси (хх) до достижения требуемого угла, и приводом (3) двигателя, который вращает инструменты (23) с запрограммированной скоростью. Продвижение головки (2) относительно заготовки управляется приводом (4).
Со ссылкой на схему на Фиг. 9 программируемый электронный блок (U) принимает данные, относящиеся к обработке, выполняемой посредством команд (70, 71, 72), расположенных на панели (7), и, следовательно, управляет приводами (4) и (5), прижимными элементами (6) и двигателем (3). Тот же блок (U) соединен с датчиками (S31, S30, S6, S3), которые определяют соответственно угловое положение гребенки (31), положение каретки (30) на гребенке (31), положение прижимных элементов (60) и скорость вала двигателя (3).
В задней части (13) станка располагается инструмент и пространство (М) для хранения оснасток в соответствии с секцией (А) для пневматического сброса опилок. Упоры (14) и (19) также могут быть моторизированы вместо относящихся к типу с ручным управлением.
На чертежах ссылочная позиция «24» обозначает рукоятку ручной регулировки высоты группы, образованной рабочей головкой (2) и двигателем (3) относительно гребенки (31). Также это регулировочное устройство (24) может быть заменено электроприводом.
На практике детали выполнения могут изменяться в любом эквиваленте со ссылкой на расположение и конструкцию отдельных элементов, описанных и проиллюстрированных, тем самым не выходя за рамки объема предложенного решения и, таким образом, оставаясь в рамках объема, обеспечиваемого этим патентом.
Реферат
Изобретение относится к деревообрабатывающей промышленности, в частности к сверлильным станкам. Станок содержит опорную конструкцию, рабочую плоскость, рабочую головку со множеством шпинделей, приводные средства для шпинделей, опорные средства для рабочей головки, средства управления вращением опорных средств, средства перемещения рабочей головки и множество прижимов для блокирования заготовки. Средства для привидения в действие шпинделей содержат электромотор, размещенный по центру на задней стороне рабочей головки. Средства поддержания рабочей головки содержат пластину, на которой установлена каретка, которая поддерживает указанный двигатель и рабочую головку. Средства вращения опорных средств содержат линейный электропривод, соединенный на одной стороне с конструкцией, а на другой стороне с опорными средствами. Приводные средства рабочей головки содержат линейный электропривод, связанный на одной стороне со средствами поддержания рабочей головки, а на другой стороне с кареткой. Станок содержит программируемый электронный блок, который управляет указанным электромотором, линейными электроприводами и электрическими прижимами. 4 з.п. ф-лы, 9 ил.
Комментарии