Одновременное зондирование нескольких зон для погрузочно-разгрузочных устройств - RU2534008C2
Код документа: RU2534008C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИЧЕСКОГО ПРИМЕНЕНИЯ
Настоящее изобретение относится в целом к погрузочно-разгрузочным устройствам и в частности к системам и способам, объединяющим данные по зонам обнаружения в дополнительные беспроводные средства дистанционного управления погрузочно-разгрузочными устройствами.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Низкие подъемники-загрузчики традиционно используются для набора товара на складах и в распределительных пунктах. Подобные подъемники-загрузчики, как правило, оснащены грузовыми вилочными захватами и силовой установкой, а также платформой, которую оператор может использовать для управления устройством. Силовая установка оборудована рулевым колесом и соответствующими механизмами тяги и рулевого управления, например подвижным рычагом рулевого управления, соединенным с рулевым колесом. Рукоятка управления, прикрепленная к рычагу управления, как правило, предусматривает органы оперативного управления, необходимые для приведения устройства в движение и осуществления погрузочно-разгрузочных функций.
При стандартном наборе товара оператор комплектует заказ из имеющихся в наличии единиц товара, находящихся в расположенных между многочисленными проходами склада или распределительного пункта зонах хранения. При этом оператор направляет низкий подъемник-загрузчик в первое место, где необходимо забрать товар. При наборе товара оператор, как правило, спускается с подъемника-загрузчика, подходит к нужному месту и достает заказанный товар (товары) из соответствующей зоны хранения. Затем оператор помещает товар на паллету, в ящик или на другую подложку, удерживаемую вилочным захватом подъемника-загрузчика. После завершения процесса комплектации заказа оператор направляет подъемник-загрузчик в следующее место, где нужно забрать товар. Вышеописанный процесс повторяется до тех пор, пока весь заказанный товар не будет укомплектован.
Часто оператору приходится повторять процесс набора для одного заказа по несколько сотен раз. Кроме того, за смену оператору может понадобиться укомплектовать несколько заказов. По существу, у оператора уходит очень много времени на перестановку подъемника-загрузчика, что сокращает время на набор товара.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В соответствии с различными объектами настоящего изобретения погрузочно-разгрузочное устройство с контролем зон обнаружения включает в себя силовую установку для приведения устройства в движение, грузозахватное приспособление, закрепленное на силовой установке, как минимум один бесконтактный датчик препятствий, установленный на устройстве, и контроллер. Можно сказать, что грузозахватное приспособление вытянуто преимущественно назад относительно силовой установки.
Датчик(и) препятствий способен определить не менее двух зон обнаружения в районе эксплуатации устройства. Особенно удобно то, что каждая зона обнаружения может включать в себя область, частично расположенную спереди от движущегося вперед устройства. Таким образом, как минимум один бесконтактный датчик настраивается на обнаружение препятствий, находящихся на траектории движения погрузочно-разгрузочного устройства. Кроме того, контроллер настраивается на управление как минимум одним параметром устройства, а также настраивается на получение информации от датчика(-ов) препятствий и на выполнение первого действия, если устройство находится в движении, а препятствие обнаруживается в первой из зон обнаружения; на выполнение второго действия, отличного от первого, если устройство находится в движении, а препятствие обнаруживается во второй из зон обнаружения. Однако следует понимать, что можно настроить как минимум один бесконтактный датчик препятствия на определение зон обнаружения в любом направлении относительно-погрузочно-разгрузочного устройства, например на определение препятствий, расположенных сбоку и/или сзади от устройства. Как правило, в вариантах осуществления изобретения предусмотрено более одного бесконтактного датчика препятствий, а именно до 12, до 10 или до 7 датчиков (т.е. 2, 3, 4, 5 или 6). При наличии более одного бесконтактного датчика препятствий следует понимать, что не все датчики будут определять зоны обнаружения, как минимум частично охватывающие области перед устройством, т.е. датчики могут быть расположены таким образом, чтобы обнаруживать препятствия сбоку и/или сзади от устройства. Возможно использование любых подходящих бесконтактных датчиков препятствий, например ультразвуковых, лазерных и т.п.
Первая из зон обнаружения может являться зоной остановки, когда первым действием контроллера является останов. Вторая из зон обнаружения может являться зоной первой скорости, когда вторым действием контроллера является уменьшение скорости до первой. Аналогичным образом могут настраиваться третья, четвертая, пятая, шестая и прочие зоны обнаружения. Например, третья зона обнаружения может являться зоной второй скорости, когда контроллер настраивается на уменьшение скорости до второй, т.е. уменьшение скорости движения устройства до второй заданной скорости, если устройство движется на более высокой скорости, а в зоне второй скорости обнаруживается препятствие. Кроме того, контроллер можно настроить на изменение как минимум одного параметра устройства, кроме скорости, в ответ на обнаружение препятствия как минимум в одной из зон обнаружения. Например, в альтернативных вариантах осуществления изобретения одна или более зон обнаружения могут представлять собой зоны изменения угла поворота, и контроллер настраивается на изменение угла поворота при обнаружении препятствия в соответствующей зоне изменения угла поворота. Как минимум одна зона может быть связана более чем с одним параметром/действием устройства, например понижением скорости и изменением угла поворота. Угол поворота можно задавать, например, согласно соответствующей зоне обнаружения. Данный угол может быть любым, например до 20 градусов, до 10 градусов, до 5 градусов или до 2 градусов. Угол может быть разным в зависимости от соответствующей зоны. Например, для зоны обнаружения, находящейся дальше от погрузочно-разгрузочного устройства, величина изменения угла (например, до 2, 5 или 10 градусов) может быть меньше величины изменения угла для зоны, находящейся ближе к погрузочно-разгрузочному устройству (например, до 5, 10 или 20 градусов).
Для погрузочно-разгрузочного устройства можно также дополнительно предусмотреть дистанционное управление. Соответственно, в некоторых из вариантов осуществления изобретения погрузочно-разгрузочные устройства дополнительно оснащаются приемником для приема данных от соответствующего устройства дистанционного управления. Этот приемник соединяется с контроллером. Контроллер настраивается на связь с приемником и системой регулирования тяги устройства с целью обеспечения дистанционного управления устройством в ответ на получение команды движения от устройства дистанционного управления.
В соответствии с прочими объектами настоящего изобретения система одновременного контроля нескольких зон обнаружения для погрузочно-разгрузочного устройства включает в себя как минимум один бесконтактный датчик препятствий и контроллер. Датчик(и) препятствий способен определять как минимум две зоны обнаружения, в каждую из которых входит область, частично расположенная спереди от движущегося вперед устройства. Контроллер настраивается на взаимодействие и управление как минимум одним параметром устройства. Кроме того, контроллер также настраивается на получение информации от датчика(-ов) препятствий, чтобы выполнять первое действие, если устройство находится в движении, а препятствие обнаруживается в первой из зон обнаружения, и выполнять второе действие, отличное от первого, если устройство находится в движении, а препятствие обнаруживается во второй из зон обнаружения.
В соответствии с прочими объектами настоящего изобретения погрузочно-разгрузочное устройство с дополнительным дистанционным управлением может обеспечивать контроль зоны обнаружения. Погрузочно-разгрузочное устройство может включать в себя силовую установку для приведения устройства в движение, грузозахватное приспособление, закрепленное на силовой установке, и приемник, установленный на устройстве и предназначенный для приема данных от соответствующего устройства дистанционного управления. Сигналы, передаваемые устройством дистанционного управления приемнику, включают как минимум сигнал первого типа, обозначающий команду движения, когда отправляется запрос на перемещение устройства на определенное расстояние. Устройство также оборудовано как минимум одним бесконтактным датчиком препятствий, способным определять не менее двух зон обнаружения, в каждую из которых входит область, частично расположенная спереди от устройства, движущегося вперед в ответ на отправленную устройством дистанционного управления команду движения.
Кроме того, устройство включает в себя контроллер, взаимодействующий с приемником и системой регулирования тяги с целью обеспечения дистанционного управления устройством в ответ на команды движения, получаемые от устройства дистанционного управления. Контроллер настраивается на выполнение первого действия, если устройство перемещается на основании полученной от устройства дистанционного управления команды движения, а препятствие обнаруживается в первой из зон обнаружения, и на выполнение второго действия, отличного от первого, если устройство перемещается на основании полученной от устройства дистанционного управления команды движения, а препятствие обнаруживается во второй из зон обнаружения.
В соответствии с прочими объектами настоящего изобретения предусмотрены системы и способы осуществления дополнительной системы дистанционного управления зонами обнаружения, которая может быть установлена на погрузочно-разгрузочном устройстве. Дополнительная система дистанционного управления зонами обнаружения включает в себя устройство дистанционного управления для беспроводной передачи как минимум сигнала первого типа, означающего команду движения, когда отправляется запрос о перемещении устройства на заданное расстояние. Оператор управляет данным устройством вручную. Система также предусматривает приемник для установки на погрузочно-разгрузочное устройство. Данный приемник получает сигналы от соответствующего устройства дистанционного управления. Кроме того, система включает как минимум один бесконтактный датчик препятствий, способный определять не менее двух зон обнаружения, в каждую из которых входит область, частично расположенная спереди от устройства, движущегося вперед в ответ на отправленную устройством дистанционного управления команду движения.
Кроме того, система включает в себя контроллер, взаимодействующий с приемником и системой регулирования тяги с целью обеспечения дистанционного управления устройством в ответ на команды движения, получаемые от устройства дистанционного управления. Контроллер настраивается на выполнение первого действия, если устройство перемещается на основании полученной от устройства дистанционного управления команды движения, а препятствие обнаруживается в первой из зон обнаружения, и на выполнение второго действия, отличного от первого, если устройство перемещается на основании полученной от устройства дистанционного управления команды движения, а препятствие обнаруживается во второй из зон обнаружения.
Также предусматривается способ эксплуатации погрузочно-разгрузочного устройства с использованием нескольких зон обнаружения. Первая и вторая зоны обнаружения определяются в области, как минимум частично расположенной спереди от движущегося вперед погрузочно-разгрузочного устройства. Первое действие выполняется, когда неприемлемый объект обнаруживается в первой зоне обнаружения, а второе действие, отличное от первого, выполняется, когда неприемлемый объект обнаруживается во второй зоне обнаружения.
Следует понимать, что особенности, описанные в отношении какого-либо объекта или варианта осуществления изобретения, могут также применяться в другом объекте или варианте изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
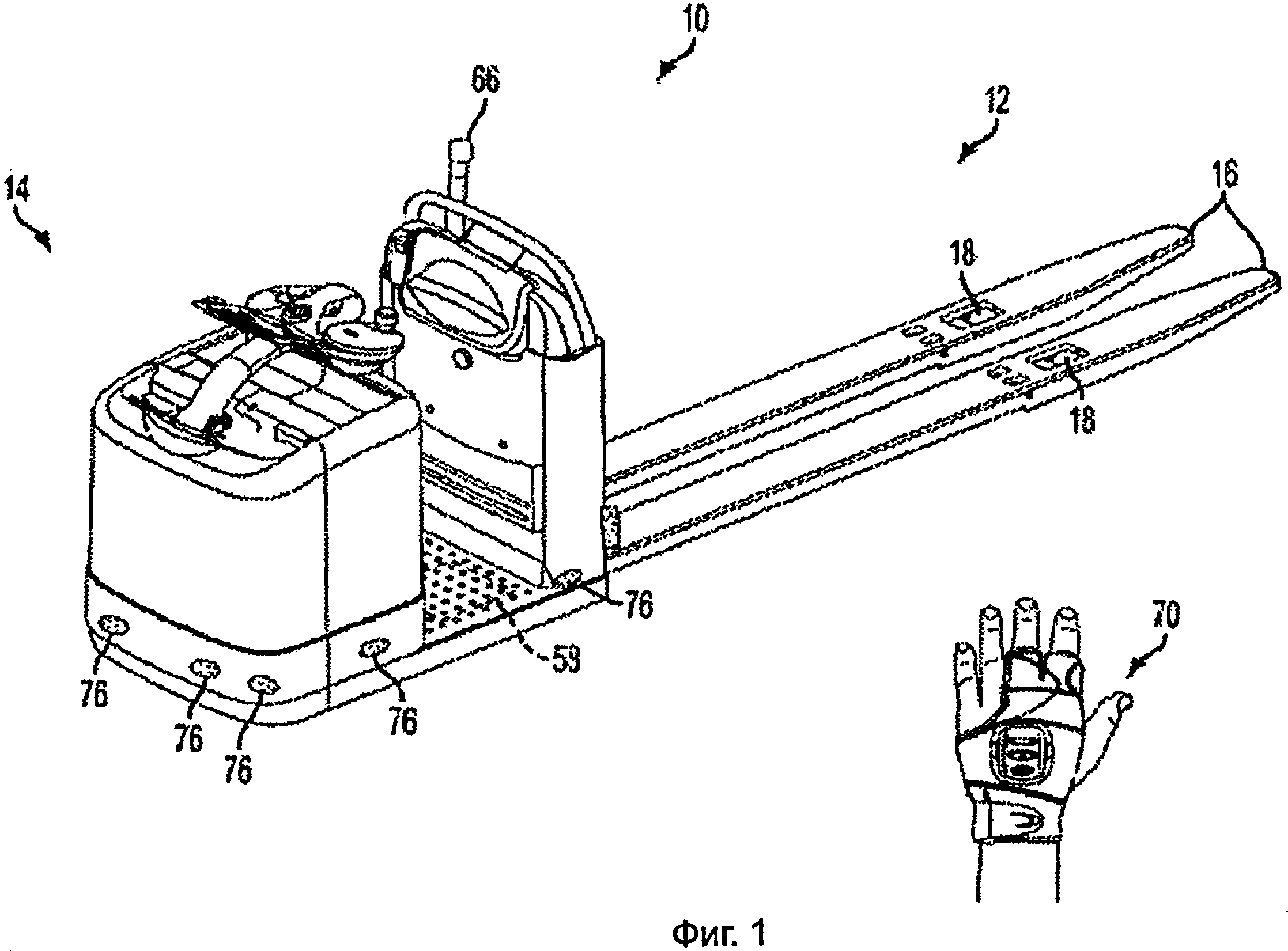
Фиг.1 представляет собой иллюстрацию погрузочно-разгрузочного устройства с дополнительным дистанционным управлением в соответствии с различными объектами настоящего изобретения;
Фиг.2 представляет собой схематическое изображение нескольких элементов погрузочно-разгрузочного устройства с дополнительным дистанционным управлением в соответствии с различными объектами настоящего изобретения;
Фиг.3 представляет собой схематическое изображение зон обнаружения погрузочно-разгрузочного устройства в соответствии с различными объектами настоящего изобретения;
Фиг.4 представляет собой схематическое изображение типичного метода обнаружения предмета в соответствии с различными объектами настоящего изобретения;
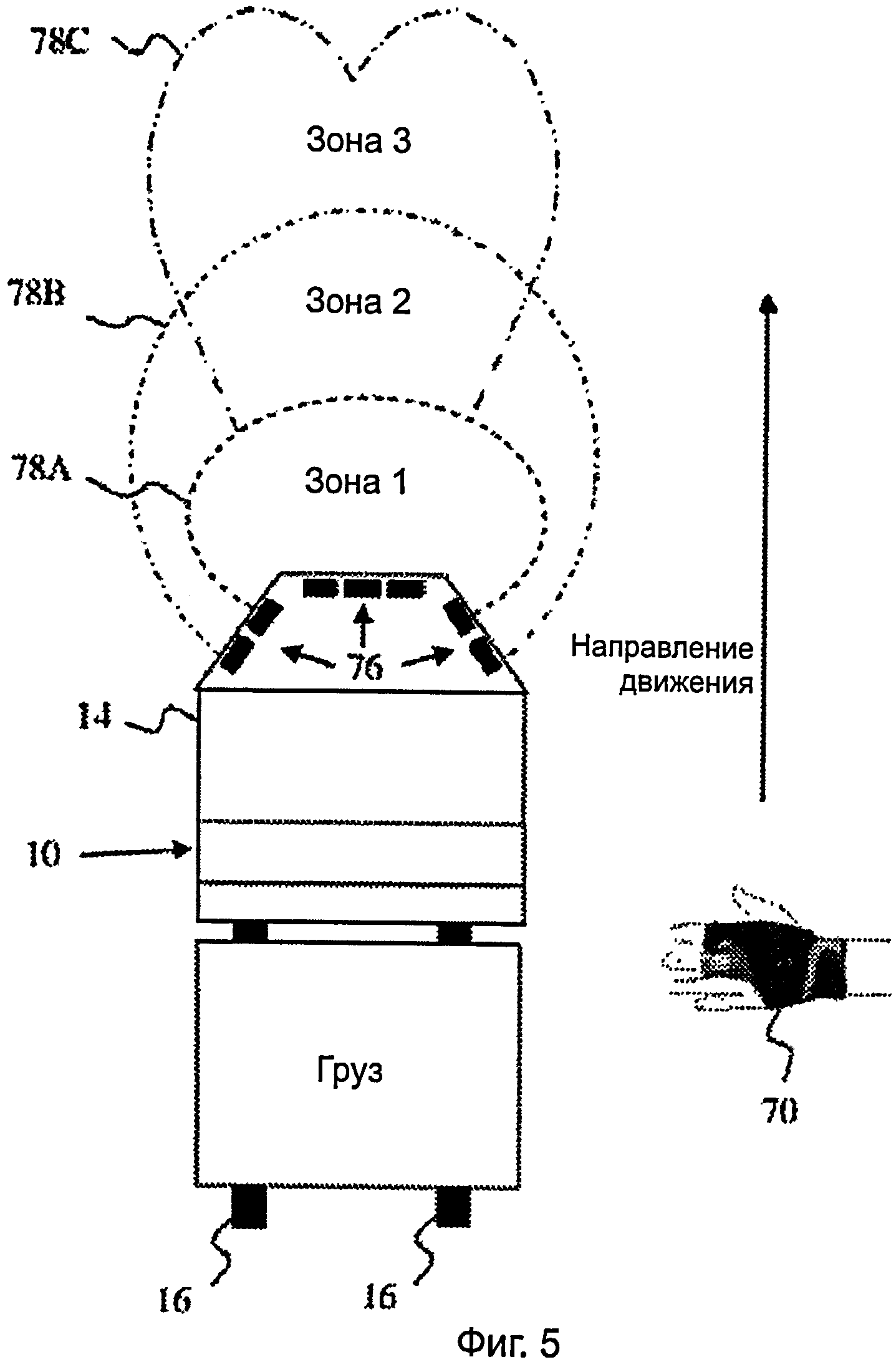
Фиг.5 представляет собой схематическое изображение множества зон обнаружения погрузочно-разгрузочного устройства в соответствии с прочими объектами настоящего изобретения;
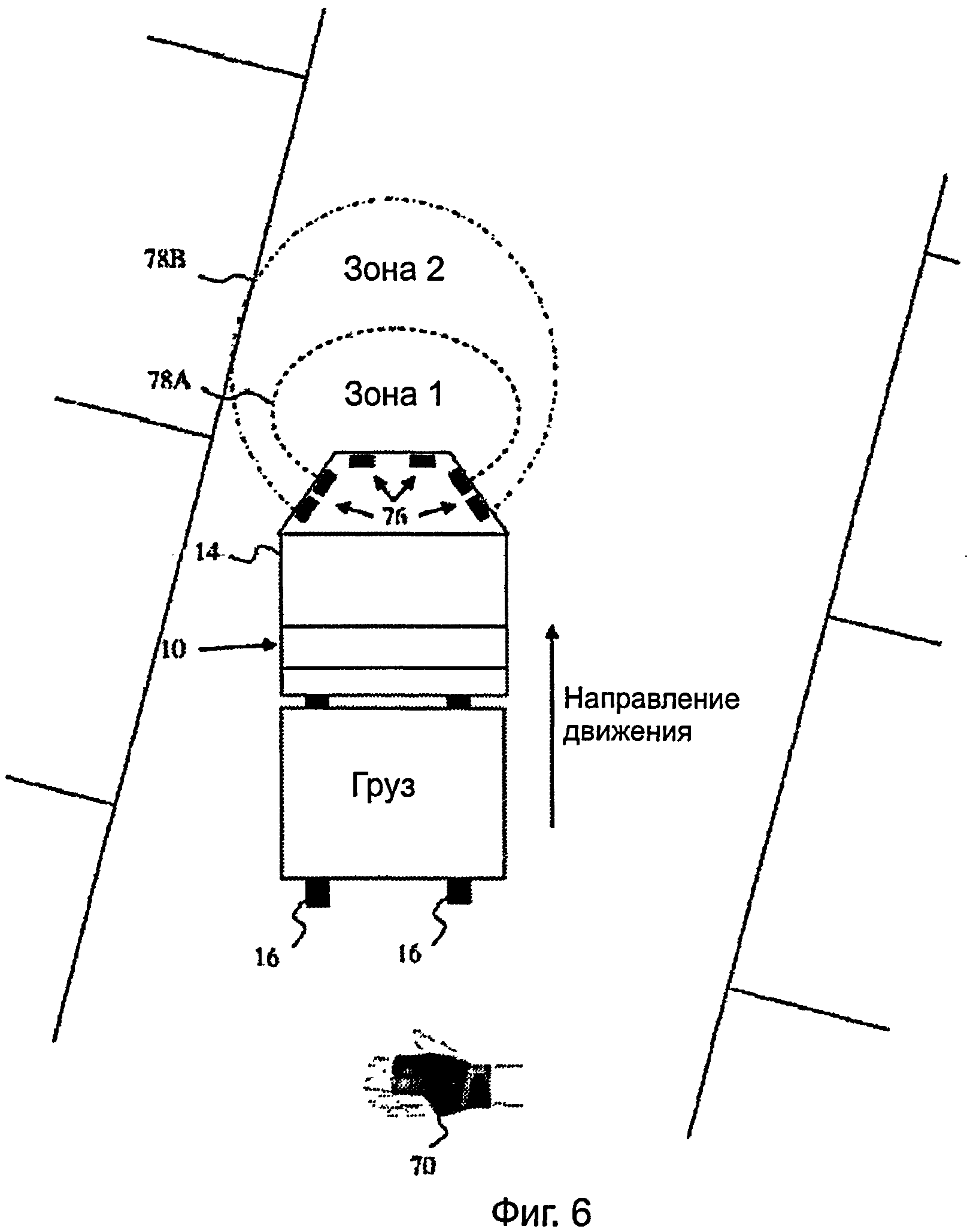
Фиг.6 представляет собой схематическое изображение работающего в проходах склада погрузочно-разгрузочного устройства с дополнительным дистанционным управлением в соответствии с различными объектами настоящего изобретения;
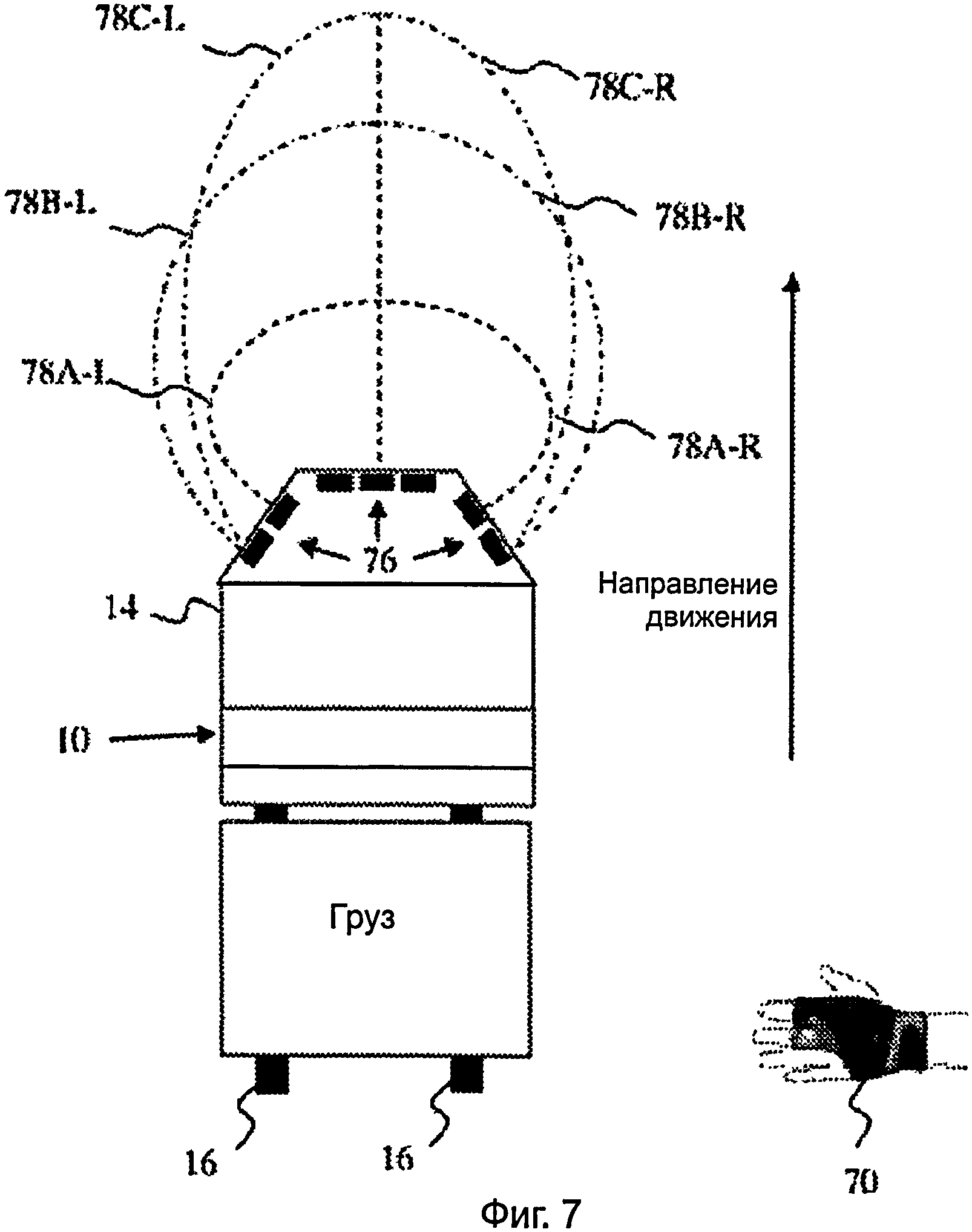
Фиг.7 представляет собой схематическое изображение множества зон обнаружения погрузочно-разгрузочного устройства, позволяющих различать направление в соответствии с прочими объектами настоящего изобретения;
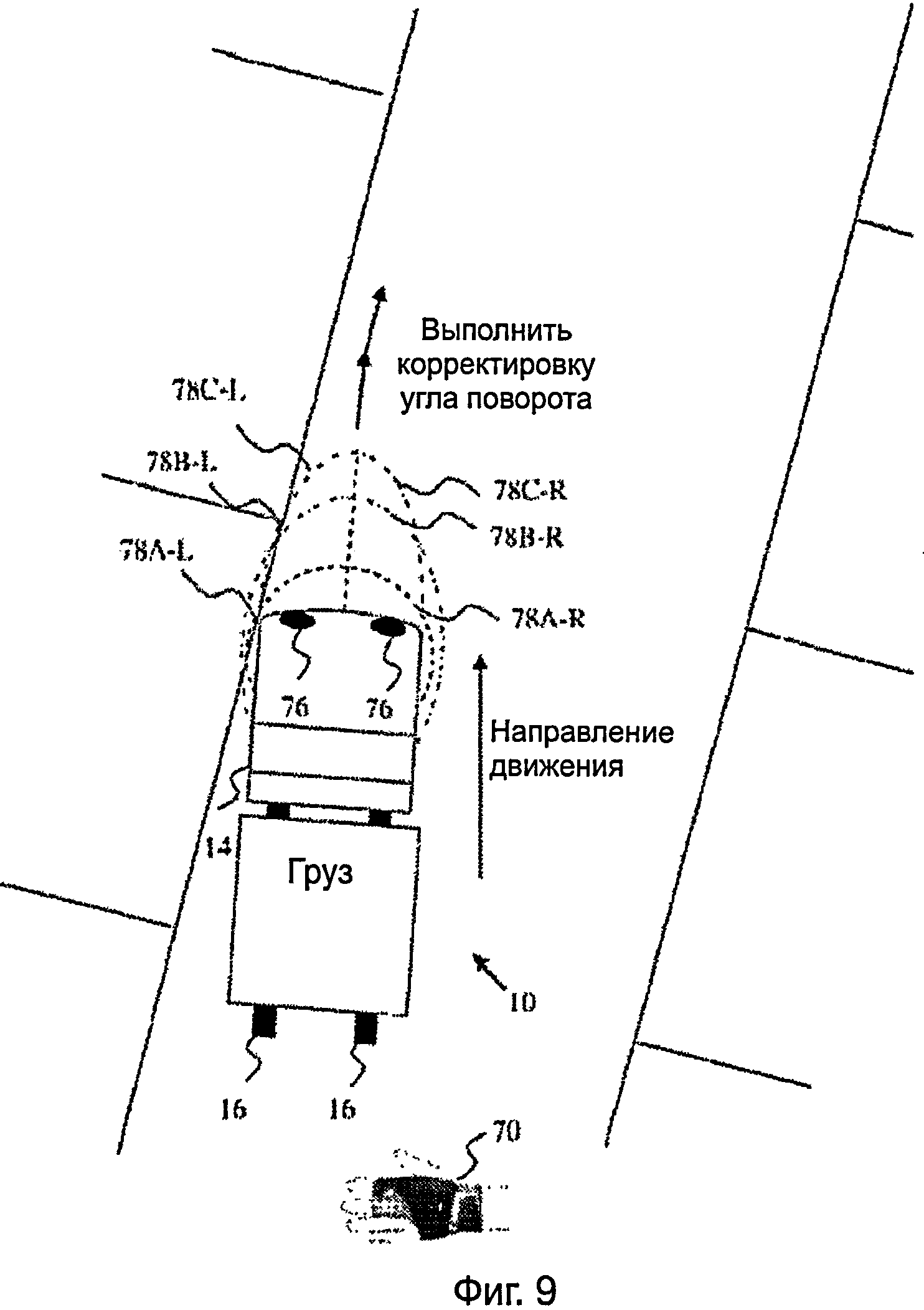
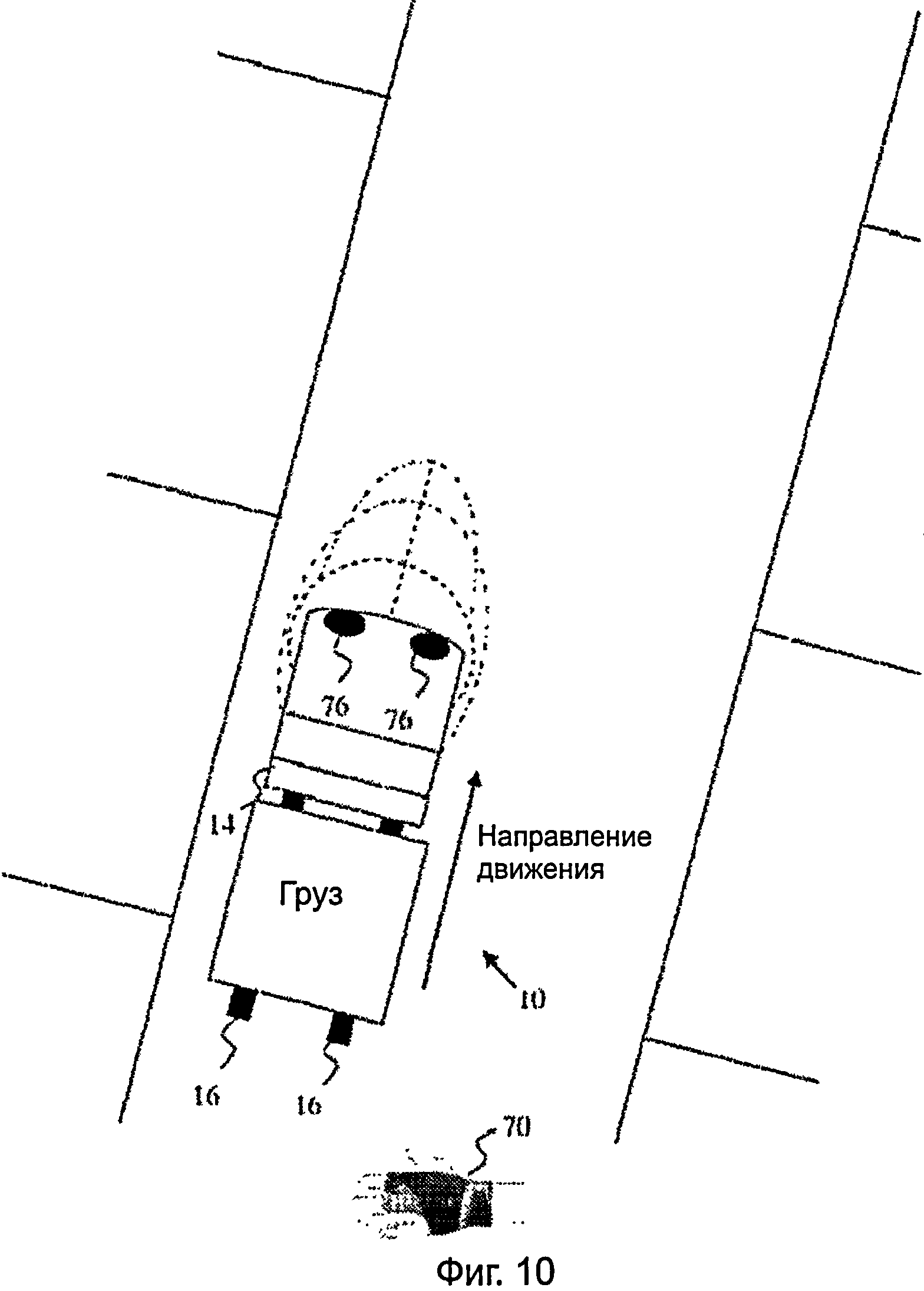
На Фиг.8-10 показано использование нескольких зон обнаружения для корректировки рулевого управления погрузочно-разгрузочного устройства с дополнительным дистанционным управлением в соответствии с прочими объектами настоящего изобретения;
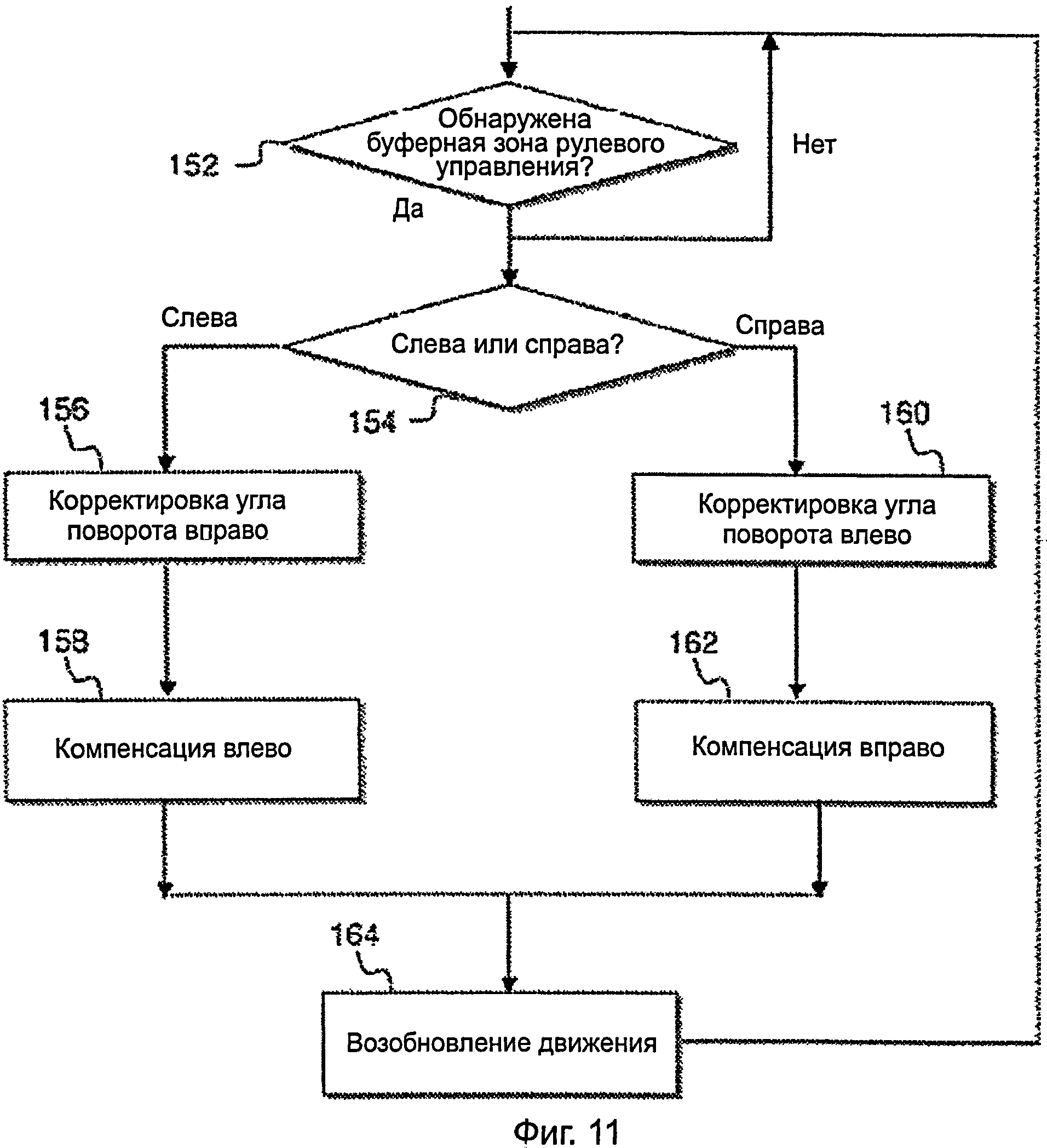
Фиг.11 представляет собой блок-схему способа корректировки рулевого управления в соответствии с различными объектами настоящего изобретения; и
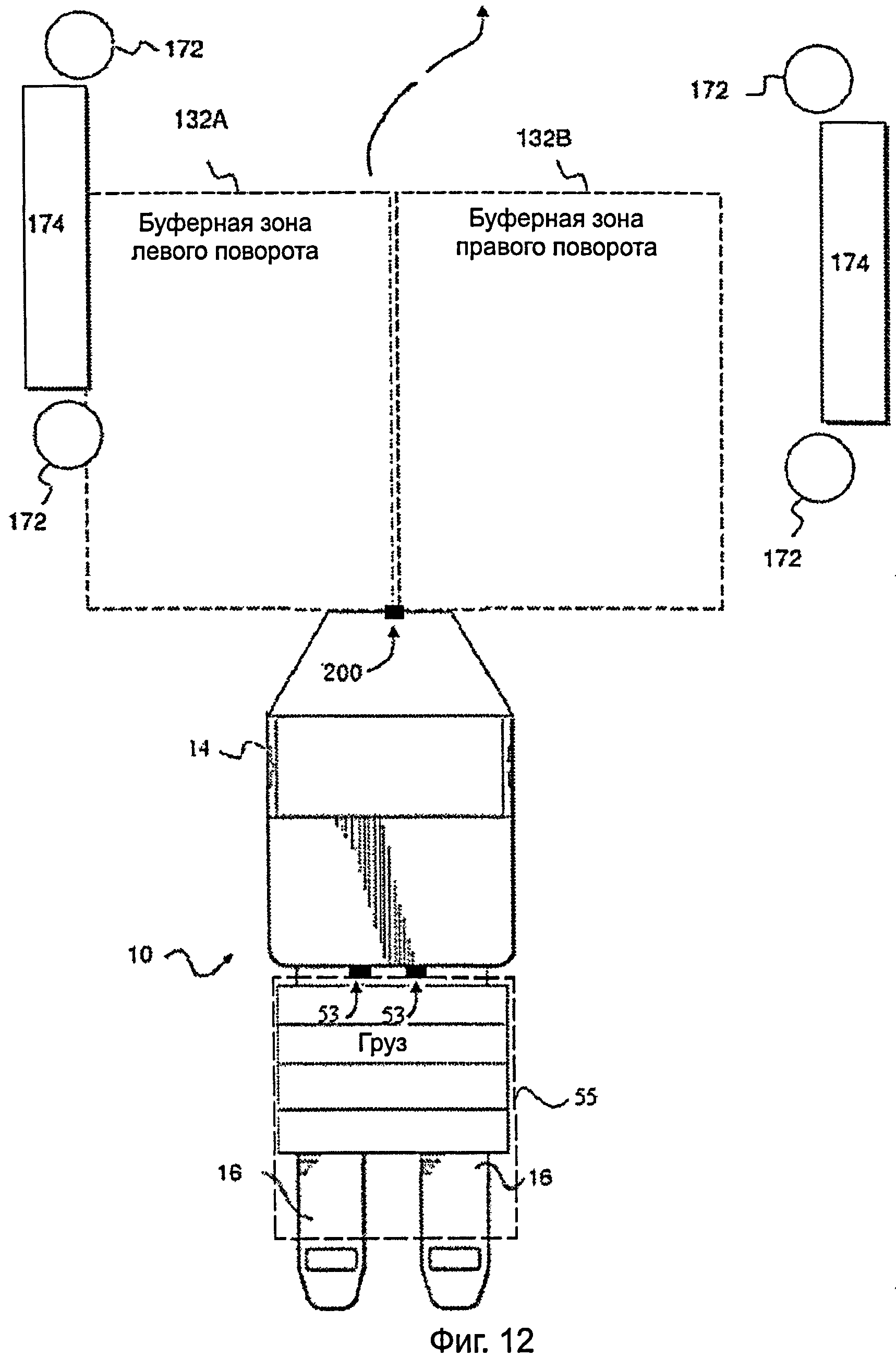
Фиг.12 представляет собой схематическое изображение погрузочно-разгрузочного устройства, перемещающегося по узкому проходу склада на основании дистанционного беспроводного управления и выполняющего автоматически корректировку рулевого управления в соответствии с различными объектами настоящего изобретения.
СПОСОБЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В следующем подробном описании вариантов осуществления изобретения делается ссылка на соответствующие чертежи, которые являются частью настоящего документа и в которых в качестве иллюстрации, но не в качестве ограничения показаны особые варианты осуществления изобретения. Следует понимать, что возможны также другие варианты и изменения без отклонения от духа и объема различных вариантов осуществления настоящего изобретения.
Низкий подъемник-загрузчик
Если посмотреть на чертежи, в частности на фиг.1, погрузочно-разгрузочное устройство, показанное как подъемник-загрузчик 10, включает в себя грузозахватное приспособление 12, закрепленное на силовой установке 14. Грузозахватное приспособление 12 включает пару вилочных захватов 16. На каждом вилочном захвате 16 имеется опорное колесо 18. Грузозахватное приспособление может также предусматривать другие устройства в дополнение или вместо показанных вилочных захватов 16, например подпорку, подъемные вилы складывающегося типа, откидные упоры или отдельные регулируемые по высоте вилочные захваты. Кроме того, грузозахватное приспособление 12 может включать такие устройства для погрузки-разгрузки, как грузоподъемник, грузовая платформа или другая опорная конструкция, устанавливаемая на вилочные захваты 16 или иным образом предоставляемая в качестве опоры и устанавливаемая на подъемник-загрузчик 10.
Показанная силовая установка 14 включает в себя открытое рабочее место оператора, отделяющее первую часть силовой установки 14 (напротив вилочных захватов 16) от второй части (рядом с вилочными захватами 16). Открытое рабочее место оператора представляет собой платформу, на которую оператор может вставать для управления подъемником-загрузчиком 10. На платформе также предусмотрено положение, из которого оператор может управлять грузозахватными приспособлениями подъемника-загрузчика 10. Можно установить датчики присутствия 58 над или под настилом платформы рабочего места оператора. Кроме того, можно также установить датчики присутствия 58 рядом с рабочим местом оператора для определения присутствия оператора на подъемнике-загрузчике 10. В примере данного устройства, приведенном на фиг.1, датчики присутствия 58 показаны пунктиром, означающим, что они размещены под настилом платформы. В данном случае датчиками присутствия 58 могут быть датчики нагрузки, выключатели и т.д. Или же датчики присутствия могут быть установлены над платформой 56. В этом случае используется технология ультразвука, емкостные датчики или прочие технологии зондирования.
На силовой установке 14 вертикально установлена антенна 66, предназначенная для получения управляющих сигналов от соответствующего устройства дистанционного управления 70. Устройство дистанционного управления 70 может включать в себя передатчик, находящийся у оператора. Оператор может вручную управлять устройством дистанционного управления, например нажатием кнопки или других рычагов управления, что позволяет устройству 70 передавать погрузочно-разгрузочному устройству беспроводным способом как минимум сигналы первого типа, означающие команду движения, т.е. отправлять погрузочно-разгрузочному устройству запрос на перемещение на заданное расстояние.
Подъемник-загрузчик 10 также предполагает один или более датчиков препятствий 76, устанавливаемых на погрузочно-разгрузочном устройстве в направлении концевой части силовой установки 14 и/или по сторонам силовой установки 14. Датчики препятствий 76, включающие как минимум один бесконтактный датчик препятствий, установленный на подъемнике-загрузчике, и способные определять не менее двух зон обнаружения, при этом в каждую зону обнаружения входит область, как минимум частично находящаяся спереди устройства, движущегося вперед по команде от устройства дистанционного управления, что будет более подробно описано ниже. Для датчиков препятствий 76 может использоваться любая подходящая технология бесконтактного обнаружения, например ультразвуковые датчики, оптические устройства распознавания, инфракрасные датчики, лазерные датчики и пр., способные определять наличие предметов/препятствий в заданных зонах обнаружения силовой установки 14.
По существу, подъемник-загрузчик 10 может быть выполнен в другом формате и стиле, с другими функциями, например в виде автопогрузчика, включающего рычаг рулевого управления, соединенный с рукояткой, обеспечивающей управление погрузчиком. При этом подъемник-загрузчик 10 может иметь те же органы управления, что показаны на фиг.1, или другие. Кроме того, подъемник-загрузчик 10, дополнительная система дистанционного управления и/или их элементы могут обладать дополнительными и/или альтернативными свойствами, подробно описанными в поданной 14 сентября 2006 года заявке на предварительное охранное свидетельство США, рег. №60/825688, под названием «СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫМ УСТРОЙСТВОМ»; в поданной 14 сентября 2007 года заявке на патент США, рег. №11/855310, под названием «СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫМ УСТРОЙСТВОМ»; в поданной 14 сентября 2007 года заявке на патент США, рег. №11/855324, под названием «СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫМ УСТРОЙСТВОМ»; в поданной 14 сентября 2007 года международной заявке на патент №PCT/US07/78455, под названием «СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫМ УСТРОЙСТВОМ»; в поданной 2 июля 2009 года заявке на предварительное охранное свидетельство США, рег. №61/222632, под названием «ПРИБОР ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫМ УСТРОЙСТВОМ»; в поданной 18 августа 2009 года заявке на предварительное охранное свидетельство США, рег. №61/234866, под названием «КОРРЕКТИРОВКА РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО УСТРОЙСТВА С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ». Подробное описание данных заявок включено в данный документ по соотнесению.
Система контроля для дистанционного управления низким подъемником-загрузчиком
Если посмотреть на Фиг.2, на блок-схеме 100 показано устройство управления для передачи дистанционных команд подъемнику-загрузчику 10. Антенна 66 соединяется с приемником 102 для получения команд, отправляемых устройством дистанционного управления 70. Приемник 102 передает полученные сигналы управления контроллеру 103, соответствующим образом реагирующему на полученные команды. Реакция может состоять из одного или нескольких действий либо бездействия в зависимости от применяемой логики. Немедленными действиями могут быть управление, регулировка или иное влияние на один или несколько элементов устройства 10. Контроллер 103 может также получать входные сигналы 104, например, от таких источников, как датчики присутствия 58, датчики препятствий 76, реле, кодеры и прочие устройства или характерные особенности устройства 10, позволяющие определить, какое действие необходимо совершить в ответ на полученные от устройства дистанционного управления 70 команды. Датчики 58, 76 и пр. можно подключить к контроллеру 103 через входы 104 или через соответствующую сеть, например шину CAN 110.
В примере устройство дистанционного управления используется для беспроводной передачи управляющего сигнала, представляющего собой сигнал первого типа, например команду движения, направляемую приемнику 102, установленному на подъемнике-загрузчике 10. Команда движения также именуется в настоящем документе «сигналом движения», «запросом движения» или «сигналом возобновления движения». Запрос движения используется для отправки устройству 10 команды о перемещении на заданное расстояние, например требования о продвижении или медленной езде в первом направлении на заданное расстояние. Первое направление может определяться, например, как движение устройства 10 в сторону силовой установки 14, т.е. с вилочным захватом 16 сзади. Однако можно задать и другие направления движения. Кроме того, можно заставлять устройство 10 двигаться строго по прямой или по заранее заданному маршруту. Соответственно, ограниченная длина перемещения может определяться примерной длиной перемещения, временем перемещения или прочими параметрами.
Таким образом, сигнал первого типа, получаемый приемником 102, передается контроллеру 103. Если контроллер 103 определяет сигнал движения как полезный, а текущие условия работы погрузочно-разгрузочного устройства как приемлемые (что подробнее объясняется ниже), контроллер 103 отправляет соответствующему устройству управления погрузочно-разгрузочного устройства 10 сигнал движения вперед и последующего останова устройства 10. Как будет более подробно описано ниже, останавливать устройство 10 можно разными способами, например дать ему остановиться по инерции или применить тормоз для остановки устройства.
К примеру, контроллер 103 может быть соединен с системой регулирования тяги, показанной как контроллер тягового двигателя 106 устройства 10. Контроллер тягового двигателя 106 соединен с тяговым двигателем 107, приводящим в движение как минимум одно управляемое колесо 108 устройства 10. Контроллер 103 может взаимодействовать с контроллером тягового двигателя с целью ускорения, замедления, регулировки или иного ограничения скорости устройства 10 в ответ на полученную от устройства дистанционного управления 70 команду движения. Контроллер 103 также может быть подключен к контроллеру рулевого управления 112, соединенному с двигателем рулевого управления 114, контролирующим как минимум одно управляемое колесо 108 устройства 10. В этом смысле контроллер 103 может регулировать работу устройства, заставляя его двигаться по заданной траектории или придерживаться заданного маршрута в ответ на полученную от устройства дистанционного управления 70 команду движения.
Еще одним наглядным примером является соединение контроллера 103 с переключателем тормоза 116, дающим команду торможения 117 с целью уменьшения скорости, останова или управления скоростью устройства иным образом в ответ на полученную от устройства дистанционного управления 70 команду движения. Кроме того, контроллер 103 может быть соединен с другими элементами устройства, например с главными контакторами 118 и/или прочими выходами 119, относящимися к погрузочно-разгрузочному устройству 10, насколько это возможно, с целью выполнения необходимых действий в ответ на команды, отправляемые устройством дистанционного управления.
В соответствии с различными объектами настоящего изобретения контроллер 103 может взаимодействовать с приемником 102 и регулятором тяги 106 с целью активации дистанционного управления устройством и получения команд движения от соответствующего устройства дистанционного управления 70. Кроме того, контроллер 103 можно настроить на выполнение первого действия, если устройство перемещается на основании полученной от устройства дистанционного управления команды движения, а препятствие обнаруживается в первой из зон обнаружения. Контроллер 103 можно также настроить на выполнение второго действия, отличного от первого, если устройство перемещается на основании полученной от устройства дистанционного управления команды движения, а препятствие обнаруживается во второй из зон обнаружения. При этом при получении контроллером 103 сигнала движения от устройства дистанционного управления 70 контроллер 103 может учитывать различные факторы для определения необходимости в выполнении действия на основании сигнала движения и того, какие именно действия следует предпринять. Особенности погрузочно-разгрузочного устройства, статус или состояние одного или нескольких из параметров, условия окружающей среды и прочие характеристики могут повлиять на то, как контроллер 103 реагирует на запросы движения, отправляемые устройством дистанционного управления 70.
Контроллер 103 может также отказаться реагировать на сигнал движения в зависимости от состояния погрузочно-разгрузочного устройства, например, в связи с факторами окружающей среды или эксплуатационными факторами. К примеру, контроллер 103 может проигнорировать полезный в иной ситуации запрос движения на основании информации, полученной от одного или нескольких датчиков 58, 76. В соответствии с различными объектами настоящего изобретения контроллер 103 может дополнительно учитывать такие факторы, как нахождение оператора на устройстве 10, при определении необходимости реагирования на команду движения с устройства дистанционного управления 70. Например, как указано выше, на устройстве 10 может устанавливаться как минимум один датчик присутствия 58 для определения того, находится ли оператор на погрузочно-разгрузочном устройстве. В этом смысле контроллер 103 можно настроить таким образом, чтобы он в ответ на запрос движения активировал дистанционное управление устройством, когда датчик(и) присутствия 58 не регистрируют наличие оператора на устройстве.
Контроллер 103 может также учитывать прочие целесообразные условия с целью интерпретации и выполнения действия в ответ на получаемые сигналы. Другие примеры факторов более подробно описаны в поданной 14 сентября 2006 года заявке на предварительное охранное свидетельство США, рег. №60/825688, под названием «СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫМ УСТРОЙСТВОМ»; в поданной 14 сентября 2007 года заявке на патент США, рег. №11/855310, под названием «СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫМ УСТРОЙСТВОМ»; в поданной 14 сентября 2007 года заявке на патент США, рег. №11/855324, под названием «СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫМ УСТРОЙСТВОМ». Подробное описание данных заявок включено в данный документ по соотнесению.
После подтверждения запроса движения контроллер 103 взаимодействует с контроллером тягового двигателя 106 напрямую, косвенно, через шину CAN 110 или прочими способами для приведения устройства 10 в движение. В зависимости от осуществления изобретения контроллер 103 может взаимодействовать с контроллером тягового двигателя 106 и давать устройству 10 команду двигаться вперед на заданное расстояние. Или же контроллер 103 может взаимодействовать с контроллером тягового двигателя 106 и в ответ на определение необходимости и поддержание в активном состоянии устройства дистанционного управления 70 давать устройству 10 команду двигаться вперед в течение определенного времени. Более того, устройство 10 можно настроить таким образом, чтобы оно медленно двигалось до тех пор, пока поступает управляющий сигнал движения. Или же контроллер 103 можно настроить на блокировку по времени и останов устройства 10 на основании предварительно установленного события, например превышения заданного периода времени или заданного расстояния независимо от определения срабатывания соответствующего рычага управления на устройстве дистанционного управления 70.
Устройство дистанционного управления 70 также может передавать сигнал второго типа, например «сигнал останова», означающий, что устройство 10 должно применить торможение и/или остановиться иным образом. Сигнал второго типа также может применяться, например, после отправки команды движения, т.е. после того, как устройство 10 переместится на заданное расстояние или после перемещения устройства 10 в течение заданного времени и т.п. в ответ на команду движения, полученную от устройства дистанционного управления. Если контроллер 103 определяет, что сигнал является сигналом останова, контроллер 103 отправляет контроллеру тяги 106, переключателю тормоза 116 и/или другому элементу устройства сигнал останова устройства 10. Вместо сигнала останова в качестве сигнала второго типа может использоваться сигнал движения до полной остановки (по инерции), означающий, что устройство 10 должно двигаться по инерции и в конце концов остановиться.
Время, необходимое для полной остановки устройства 10, может отличаться в зависимости от предполагаемого применения, условий окружающей среды, характеристик конкретного устройства 10, нагрузки, которой подвергается данное устройство 10, и прочих аналогичных факторов. Например, после медленной езды можно дать устройству 10 проехать по инерции некоторое расстояние, чтобы обеспечить постепенный останов устройства 10. Этого можно добиться при помощи рекуперативного торможения, позволяющего плавно остановить устройство 10. Или же по прошествии заданного периода времени можно выполнить торможение, чтобы с момента начала данной операции устройство 10 прошло определенное дополнительное расстояние. Кроме того, возможен относительно более быстрый останов устройства 10, например, в случае обнаружения препятствия на пути движения устройства 10 или в случае необходимости в резкой остановке после медленной езды. Например, контроллер может задавать определенный крутящий момент для торможения. В этом случае контроллер 103 направляет переключателю тормоза 116 команду торможения 117 для останова устройства 10.
Зоны обнаружения погрузочно-разгрузочного устройства
Если посмотреть на фиг.3, в соответствии с различными объектами настоящего изобретения, один или несколько датчиков препятствий 76 настраиваются таким образом, чтобы в совокупности обеспечить одновременное обнаружение предметов/препятствий в нескольких «зонах обнаружения». При этом контроллер 103 может настраиваться на изменение одного или нескольких рабочих параметров устройства 10 в ответ на обнаружение препятствия в одной или нескольких зонах обнаружения, как будет более подробно описано ниже. Управление устройством с применением зон обнаружения выполняется при условии присутствия оператора на устройстве. Управление устройством с применением зон обнаружения может также комбинироваться с дополнительным дистанционным управлением, что более подробно описано в настоящем документе.
Хотя в объяснительных целях в настоящем документе показано шесть датчиков препятствий 76, можно использовать любое количество данных датчиков. Число датчиков препятствий 76 зависит от используемой технологии, размера и/или диапазона зон обнаружения, количества зон обнаружения и прочих факторов.
В примере первая зона обнаружения 78А расположена близко к силовой установке 14 устройства 10. Вторая зона обнаружения 78В определяется как смежная с первой зоной обнаружения 78А и фактически описывает первую зону обнаружения 78А. Третья зона фактически определяется как вся область, выходящая за рамки первой и второй зон обнаружения 78А и 78В. Хотя вторая зона обнаружения 78В показана преимущественно как описывающая первую зону обнаружения 78А, можно расположить первую и вторую зоны обнаружения 78А и 78В любым другим образом. Например, все или некоторые из участков зон обнаружения 78А и 78В могут пересекаться, накладываться друг на друга или быть взаимно исключающими. Кроме того, может меняться форма зон обнаружения 78А и 78В. При этом может задаваться любое количество зон обнаружения. Подобные примеры подробно описаны ниже.
Нет необходимости в том, чтобы зоны обнаружения полностью окружали устройство 10. Скорее, форма зон обнаружения может зависеть от варианта осуществления изобретения, что более подробно описано ниже. Например, если зоны обнаружения 78А и 78В планируется использовать для контроля скорости при движении устройства 10 без находящегося на нем оператора, например при движении устройства на основании дистанционного управления с силовой установкой в первом положении (с вилочным захватом сзади), зоны обнаружения 78А и 78В могут быть направлены вперед по ходу движения устройства 10. Однако зоны обнаружения могут также охватывать другие области, например области сбоку от устройства 10.
В соответствии с различными объектами настоящего изобретения первая зона обнаружения 78А может обозначаться как «зона останова». Соответственно, вторая зона обнаружения 78В может обозначаться как «зона первой скорости». В таком случае, если в рамках первой зоны обнаружения 78А обнаруживается предмет, т.е. некое препятствие, а погрузочно-разгрузочное устройство 10 перемещается на основании запроса движения, отправленного устройством дистанционного управления, контроллер 103 можно настроить на выполнение действия «останов» для остановки устройства 10. При этом устройство 10 может возобновить движение после устранения препятствия. Либо для возобновления движения устройства 10 необходима вторая команда движения от устройства дистанционного управления 70.
При получении запроса движения от устройства дистанционного управления 70 в момент, когда погрузочно-разгрузочное устройство находится в неподвижном состоянии, а в рамках первой зоны обнаружения 78А обнаружен какой-либо предмет, контроллер 103 может отклонить запрос движения и не допускать движения устройства до тех пор, пока препятствие не будет удалено из зоны останова.
Если предмет/препятствие обнаружено во второй зоне обнаружения 78В, а погрузочно-разгрузочное устройство 10 перемещается на основании запроса движения, отправленного устройством дистанционного управления, контроллер 103 можно настроить на выполнение другого действия. Например, контроллер 103 может выполнить действие «понижение до первой скорости» для понижения скорости движения устройства до первой заданной скорости, если устройство перемещается на скорости, превышающей первую заданную.
Так, предположим, что устройство 10 перемещается в ответ на полученную от устройства дистанционного управления команду движения на скорости V2, определяемой совокупностью условий работы, и датчики препятствий 76 не обнаруживают помех в соответствующей зоне обнаружения. Если устройство изначально находится в неподвижном состоянии, можно разогнать его до скорости V2. Обнаружение препятствия во второй зоне обнаружения 78В (но не в первой зоне обнаружения 78А) может привести к изменению как минимум одного рабочего параметра устройства 10 при помощи контроллера 103, например к замедлению скорости движения устройства 10 до первой заданной скорости V1, которая ниже скорости V2. То есть V1 Предположим в качестве наглядного примера, что устройство 10 настроено на движение со скоростью около 2,5 миль в час (м/ч) (4 километра в час (км/ч)), если устройство 10 передвигается без оператора, на основании полученной от устройства дистанционного управления 70 команды движения, и что в определенной зоне обнаружения не найдено никаких препятствий. Если препятствие обнаруживается во второй зоне обнаружения 78В, контроллер 103 может понизить скорость устройства 10 примерно до 1,5 м/ч (2,4 км/ч) или до другой скорости, которая ниже 2,5 миль в час (м/ч) (4 километра в час (км/ч)). Если препятствие обнаруживается в первой зоне обнаружения 78А, контроллер 103 останавливает устройство 10. Вышеприведенный пример предполагает движение устройства 10 на дистанционном управлении, без оператора. В таком случае датчики препятствий 76 могут использоваться для корректировки условий работы устройства 10 без оператора. Однако датчики препятствий 76 и соответствующая логика контроллера могут также применяться в случае, когда устройством 10 управляет оператор, например, находясь на платформе или в другом удобном месте устройства 10. Таким образом, в соответствии с различными объектами настоящего изобретения, контроллер 103 может останавливать погрузочно-разгрузочное устройство или не позволять данному устройству двигаться при обнаружении предмета в зоне останова 78А независимо от того, как осуществляется управление устройством: при помощи оператора или устройства дистанционного управления. Соответственно, в зависимости от конкретного варианта осуществления возможность управления скоростью во второй зоне обнаружения 78В можно использовать (как описывалось ранее) независимо от того, как осуществляется управление устройством: при помощи оператора или устройства дистанционного управления, а также от того, находится ли оператор непосредственно на устройстве, когда управляет им. Однако в соответствии с различными объектами настоящего изобретения могут возникнуть ситуации, когда нужно отключить одну или несколько зон обнаружения, если устройством 10 управляет оператор. Например, может понадобиться проигнорировать/отключить датчики препятствий 76 или логическую схему контроллера независимо от внешних условий, если устройством 10 управляет оператор. Или, например, может понадобиться проигнорировать/отключить датчики препятствий 76 или логическую схему контроллера, если устройством 10 управляет оператор, чтобы он мог манипулировать устройством 10 в ограниченном пространстве, объезжать углы и совершать прочие действия, при которых в противном случае активировались бы одна или более зон обнаружения. По существу, в соответствии с различными объектами настоящего изобретения активацией логической схемы контроллера для обнаружения предметов в зонах обнаружения с целью управления погрузочно-разгрузочным устройством в то время, как на нем находится оператор, можно управлять вручную, программировать управление или иным образом осуществлять избирательный контроль. Если посмотреть на фиг.4, в соответствии с прочими объектами настоящего изобретения, в одном или нескольких датчиках препятствий 76 может быть использована ультразвуковая технология или другая подходящая бесконтактная технология измерения расстояния и/или определения положения. Таким образом можно измерять расстояние до предмета и/или определять, находится ли обнаруженный предмет в пределах зоны обнаружения 78А или 78В, на основании расстояния от предмета до устройства 10. Например, датчиком препятствий 76 может выступать ультразвуковой датчик, издающий звуковой сигнал, например сигнал высокой частоты, производимый пьезоэлектрическим элементом. Затем ультразвуковой датчик 76 перестает посылать сигнал и ожидает ответной реакции. При этом можно устанавливать определенное время ожидания для каждой зоны. Так, контроллер, например контроллер 103 или специальный контроллер датчиков препятствий 76, может использовать программное обеспечение, отслеживающее время ожидания реакции с целью определения того, находится ли предмет в зоне обнаружения. В соответствии с прочими объектами настоящего изобретения можно использовать несколько датчиков препятствий 76 для зондирования. Например, первый ультразвуковой датчик может послать звуковой сигнал. Затем первый ультразвуковой датчик и один или несколько дополнительных ультразвуковых датчиков ожидают ответной реакции. Таким образом, контроллер может использовать самые различные факторы для определения наличия предмета в одной или нескольких зонах обнаружения. Если посмотреть на фиг.5, применение одновременного контроля нескольких зон скорости показано в соответствии с прочими объектами и вариантами осуществления настоящего изобретения. На рисунке показано три зоны обнаружения. Если какой-либо предмет или препятствие обнаруживается в первой зоне обнаружения 78А, а устройство 10 перемещается на основании команды от устройства дистанционного управления, выполняется первое действие, например останов устройства 10, как более подробно описано в данном документе. Если какой-либо предмет или препятствие обнаруживается во второй зоне обнаружения 78В, а устройство 10 перемещается на основании команды от устройства дистанционного управления, выполняется второе действие, например ограничение скорости движения устройства. Таким образом, вторую зону обнаружения 78В можно также обозначить как зону первой скорости. Например, скорость устройства 10 можно ограничить и/или понизить до первой относительно низкой скорости (к примеру, до 1,5 м/ч (2,4 км/ч)). Если какой-либо предмет или препятствие обнаруживается в третьей зоне обнаружения 78С, а устройство 10 перемещается на основании команды от устройства дистанционного управления, выполняется третье действие, например ограничение скорости движения устройства 10 до второй скорости (к примеру, до 2,5 м/ч (4 км/ч)). Таким образом, третью зону обнаружения можно обозначить как зону второй скорости. Если в первой, второй и третьей зонах 78А, 78В и 78С не обнаружено никаких препятствий, можно при помощи дистанционного управления дать устройству 10 команду двигаться на скорости, превышающей скорость, с которой оно перемещается в третьей зоне обнаружения, т.е. примерно 4 м/ч (6,2 км/ч). Как показано на фиг.5, возможны различные схемы размещения зон обнаружения относительно погрузочно-разгрузочного устройства 10. Кроме того, на фиг.5 седьмой датчик препятствий 76 показан исключительно в целях иллюстрации. Например, седьмой датчик препятствий 76 можно отцентровать на бампере или другом удобном месте устройства 10. К примеру, третья зона 78С может находиться на расстоянии около 6,5 футов (2 метров) спереди от силовой установки 14 погрузочно-разгрузочного устройства 10. В соответствии с различными объектами настоящего изобретения можно использовать любое количество зон обнаружения. Например, в зависимости от необходимых параметров устройства можно определить множество небольших зон в различных координатах относительно устройства 10. Аналогичным образом, можно определить несколько больших зон обнаружения на основании необходимых параметров устройства. В качестве наглядного примера можно ввести таблицу в память контроллера. Если интересующим эксплуатационным параметром при работе на дистанционном управлении является скорость движения, она может соотноситься в таблице с зонами обнаружения, определяемыми расстоянием, диапазоном, координатами места или прочими параметрами. Если устройство 10 перемещается на основании команды от устройства дистанционного управления и датчик препятствий обнаруживает предмет, расстояние до данного обнаруженного предмета можно использовать как «ключ» к соответствующей скорости движения, указанной в таблице. Приведенная в таблице скорость движения может использоваться контроллером 103 для управления работой устройства 10, например для замедления и прочих действий. В зависимости от таких факторов, как нужная скорость движения устройства при работе на дистанционном управлении и требуемый тормозной путь, а также ожидаемая нагрузка на устройство 10, определенное расстояние для движения по инерции, необходимого для обеспечения устойчивости груза, время реакции устройства и прочие параметры, можно выбирать положение той или иной зоны обнаружения. Кроме того, для определения необходимого количества датчиков препятствий 76 следует учитывать такие факторы, как диапазон каждой зоны обнаружения. При этом данные могут быть статическими или динамическими и основываться на опыте оператора, нагрузке на устройство, характере нагрузки, условиях окружающей среды и прочих факторах. В качестве наглядного примера в конфигурации с несколькими зонами обнаружения, например с тремя, может понадобиться не менее семи устройств обнаружения предметов, т.е. ультразвуковых датчиков, лазерных датчиков и прочих устройств, обеспечивающих необходимый радиус действия в соответствующих условиях. При этом устройства обнаружения могут быть настроены на зондирование значительной области спереди от устройства, чтобы обеспечить соответствующую реакцию, например замедление. Как минимум один датчик может отслеживать зону в нескольких метрах впереди в направлении движения устройства 10. В соответствии с различными объектами настоящего изобретения множественные зоны скорости позволяют устройству перемещаться на относительно более высокой максимальной скорости переднего хода при дистанционном управлении, предотвращая тем самым ненужные преждевременные остановки устройства путем использования одной или нескольких промежуточных зон, где устройство снижает скорость, прежде чем принимается решение о полной остановке. В соответствии с прочими объектами настоящего изобретения, при использовании множественных зон обнаружения создается система, позволяющая соответствующему оператору более качественно управлять устройством 10 при наборе заказа. Например, если посмотреть на фиг.6, оператор расположил устройство 10 таким образом, чтобы оно не находилось на одной линии с проходом склада. По существу, при медленном перемещении устройства вперед во второй зоне обнаружения 78В может изначально быть обнаружено препятствие, например накопитель для набора или складской стеллаж. В ответ на обнаружение стеллажа устройство может понизить скорость и/или изменить направление движения. Если стеллаж обнаруживается в первой зоне обнаружения 78А, устройство 10 может остановиться, даже если оно не прошло заданного расстояния. Подобные излишние замедления или остановки также могут иметь место в тесных и/или загроможденных проходах. В соответствии с различными объектами настоящего изобретения устройство 10 может принимать решения на основании данных, получаемых от датчиков препятствий 76. Кроме того, логику, используемую устройством 10 в ответ на информацию по зонам обнаружения, можно менять в зависимости от сферы применения. В качестве примера в контроллере можно запрограммировать (и/или перепрограммировать) границы каждой зоны при системе с множественными зонами обнаружения. Заданные эксплуатационные параметры могут определять состояние, например максимальную допустимую скорость движения, действие, например торможение, движение по инерции или другой способ управляемого останова и т.д. Реакция избегания также может считаться действием. Например, действие может заключаться в регулировке угла поворота или направлении движения устройства 10. Обход препятствий В соответствии с прочими объектами настоящего изобретения зоны обнаружения могут использоваться для обхода препятствий. Как более подробно описано в настоящем документе, контроллер может также связываться с контроллером рулевого управления устройства. Поэтому одна или несколько зон обнаружения могут быть обозначены как зоны корректировки угла поворота. При этом контроллер 103 можно настроить на корректировку угла поворота при обнаружении препятствия в зоне корректировки угла поворота. Например, при наборе заказа оператор может не установить устройство строго в направлении, нужном для медленного перемещения вдоль по складскому проходу. Вместо этого устройство может быть направлено в сторону накопителей, установленных вдоль границы прохода. При этом направление движения устройства не должно вызывать столкновения устройства со стеллажом. Соответственно, эксплуатационными параметрами, подлежащими регулировке при обнаружении препятствия в определенной зоне, могут быть корректировка угла поворота, а также регулировка скорости движения устройства. В таком случае в устройстве применяется сервосистема рулевого управления. Контроллер может связываться, взаимодействовать или иным образом менять сервоуправление для изменения направления движения устройства 10. При корректировке угла поворота может возникнуть необходимость в определении контроллером того, направо или налево повернет устройство вследствие корректировки угла поворота. В этом смысле датчики препятствия 76 или другие дополнительные датчики настраиваются на передачу данных контроллеру 103, чтобы дать ему возможность принимать решения на основании направления движения в ответ на обнаружение предмета в зоне обнаружения. Например, при использовании нескольких датчиков препятствий 76 зоны обнаружения могут делиться пополам для распознавания обнаруженного предмета как находящегося справа или слева от устройства 10. Например, если посмотреть на Фиг.7, каждая зона обнаружения делится на правую и левую части. Хотя в целях наглядности показано разделение на две части, можно делить зону на любое количество частей в зависимости от параметров определенных датчиков препятствий 76, используемых в данном варианте осуществления изобретения. Корректировать угол поворота для автоматической центровки устройства 10 в складском проходе достаточно сложно. При недостаточной корректировке или несвоевременной и ненадлежащей корректировке рулевого управления невозможна настройка устройства на движение в нужном направлении. В данном случае для корректировки направления движения устройства необходимо вмешательство оператора. Это сокращает время, нужное оператору для набора заказа. Однако, если корректировка угла поворота в излишней степени компенсирует угол поворота, устройство может зигзагообразно двигаться взад-вперед по проходу. Это также представляет собой потенциальную потерю времени для оператора, набирающего заказ. Данный эффект зигзагообразного движения может также стать причиной затора в складских проходах. Если снова обратиться к Фиг.2, контроллер 103 может связываться при помощи шины CAN 110 или других средств с системой рулевого управления, например с контроллером рулевого управления 112, чтобы откорректировать траекторию движения устройства 10. Например, контроллер 103 может взаимодействовать с контроллером рулевого управления 112 для отправки команды или иного управления тяговым двигателем 114 либо другим соответствующим устройством, также соединенным с управляемыми колесами 108 устройства 10. Контроллер 103 может выравнивать траекторию движения устройства 10 или корректировать угол поворота устройства 10 до или в процессе выполнения команд движения, посылаемых устройством дистанционного управления. Фактически, контроллер 103 может переходить к режиму работы, в котором устройство 10 перемещается прямо по заданному маршруту в ответ на команду движения, полученную от беспроводного устройства дистанционного управления. Контроллер 103 может также устанавливать ограничение угла поворота при работе с дистанционным управлением, если устройству 10 предстоит двигаться в направлении, где управляемые колеса 108 стоят не прямо. Например, контроллер 103 может ограничивать угол, при котором устройство 10 может перемещаться, реагируя на команды устройства дистанционного управления, до диапазона от 5 до 10 градусов. Таким образом, кроме включения толчкового режима работы тягового двигателя 107 контроллер 103 может также выравнивать или иным образом регулировать управляемые колеса 108. В соответствии с различными объектами настоящего изобретения зоны обнаружения используются для компенсации угла поворота. В частности, первая коррекция угла поворота ассоциируется с первой из зон, например самой дальней зоной. При наличии множества зон различные величины корректировки угла поворота могут относиться к определенным зонам. При этом может также осуществляться регулировка скорости или изменение других параметров устройства. Как показано на фиг.8, устройство 10 перемещается вдоль по складскому проходу по маршруту, направляющему устройство в сторону стеллажа (не параллельно проходу). Устройство 10 работает на основании команд от устройства дистанционного управления, используя несколько (например, три) зон обнаружения. Первый угол корректировки α1 относится к самой дальней зоне (третья зона обнаружения в данном примере). Второй угол корректировки α2 относится к прилегающей зоне (вторая зона обнаружения в данном примере). Кроме того, в третьей зоне обнаружения может осуществляться понижение скорости, во второй зоне обнаружения может осуществляться понижение до другой скорости, а первая зона обнаружения может также являться зоной останова. Более того, корректировка угла поворота может быть индивидуальной для каждой из зон. Как показано на рисунке, стеллаж попадает в третью зону обнаружения, слева от устройства 10. В ответ на обнаружение данного препятствия контроллер 103 дает устройству 10 команду выполнить первую корректировку угла α1. Если посмотреть на Фиг.9, устройство 10 замедляет движение при вхождении в зону 3. Кроме того, выполняется первая корректировка угла α1. Однако в данном наглядном примере контроллер опять обнаруживает стеллаж во второй зоне обнаружения, слева от устройства 10. В ответ на обнаружение данного препятствия контроллер дает устройству команду выполнить вторую корректировку угла α2, относящуюся к зоне 2. Если посмотреть на фиг.10, после выполнения корректировки угла поворота устройство 10 располагается надлежащим образом, чтобы продолжить движение вдоль по складскому проходу. В качестве примера, а не ограничения α1<α2. Так, например, α1 может означать корректировку угла поворота примерно на 2 градуса, а α2 - корректировку угла поворота примерно на 5 градусов. После надлежащей корректировки углов поворота погрузочно-разгрузочное устройство располагается в направлении параллельно проходу. Конкретные величины углов могут меняться в зависимости от ряда факторов. Кроме того, можно статически запрограммировать угол поворота, или же он может меняться динамически, например, в зависимости от одного или нескольких условий. В соответствии с объектами настоящего изобретения в результате корректировки угла поворота устройство перемещается вдоль по складскому проходу таким образом, что стеллажи не попадают в какую-либо из зон обнаружения. Это позволяет устройству 10 передвигаться на основании дистанционного управления на максимальной скорости, не снижая ее, как происходит в случае обнаружения предмета в зоне обнаружения. На деле, радиус действия каждого датчика препятствий 76 может быть разным в зависимости от конкретного исполнения и выбора технологии бесконтактного обнаружения. Например, радиус действия одного или нескольких датчиков препятствий 76, зондирующих область спереди от силовой установки 14, может составлять примерно 0-5 футов (0-1,5 метров) или более, а радиус действия датчиков препятствий 76, расположенных сбоку от силовой установки 14, может составлять примерно 0-2 фута (0-0,6 метров). Кроме того, дальность обнаружения датчиков препятствий 76 может регулироваться или динамически изменяться другим способом. Например, радиус действия датчиков препятствий 76 может быть увеличен при возникновении определенных условий эксплуатации. Например, радиус действия датчиков препятствий 76 может регулироваться на основании скорости устройства 10, передвигающегося по команде устройства дистанционного управления. Алгоритм В соответствии с различными объектами настоящего изобретения контроллер 103 применяет алгоритм корректировки угла поворота. Если посмотреть на Фиг.11, алгоритм корректировки угла поворота состоит в определении того, обнаруживается ли в точке 152 предупреждение о буферной зоне рулевого управления. Предупреждающий сигнал буферной зоны рулевого управления в точке 152 может представлять собой, к примеру, обнаружение присутствия предмета в первой и/или второй буферных зонах рулевого управления 132А и 132В лазерным датчиком 200 таких моделей, как LMS 100 или LMS 111 производства компании Sick AG, Вальдкирх, Германия. Лазерный датчик 200 устанавливается на силовую установку 14 (см. фиг.12). Первая буферная зона рулевого управления 132А также может обозначаться как буферная зона левого поворота, а вторая буферная зона рулевого управления 132В может обозначаться как буферная зона правого поворота (см. фиг.12). При получении предупреждения о буферной зоне рулевого управления в точке 154 принимается решение относительно того, означает ли предупреждение о буферной зоне рулевого управления, что предмет обнаружен слева или справа от устройства 10, т.е. где находится обнаруженный предмет: в первой буферной зоне рулевого управления 132А или во второй буферной зоне рулевого управления 132В. Например, лазерный датчик 200 может отправить два выходных сигнала. Первый выходной сигнал означает, что предмет обнаружен в первой буферной зоне рулевого управления (левого поворота) 132А, а второй сигнал означает, что предмет обнаружен во второй буферной зоне рулевого управления (правого поворота) 132В. Или же контроллер 103 может получать необработанные данные от лазерного датчика и обрабатывать их, распознавая первую и вторую буферные зоны рулевого управления 132А и 132В в соответствии с заранее определенной схемой преобразования данных. Например, если снова обратиться к Фиг.12, лазерный датчик 200 может направлять лазерный луч в область спереди от устройства 10. При этом можно использовать несколько лазерных датчиков либо направлять один или более лазерных лучей для растрового сканирования одной или нескольких областей, находящихся спереди от устройства 10. Если предмет находится в зоне направления лазерных лучей, предмет отражает луч обратно лазерному датчику 200, который создает данные о местоположении предмета, на основании которых датчик 200 или контроллер 103 определяет координаты обнаруженного предмета, как известно из технологии лазерного зондирования. При этом лазерный датчик 200 может независимо определять и сканировать буферные зоны левого и правого поворота, либо контроллер 103 может получать данные о буферных зонах левого или правого поворота на основании осуществляемого лазером растрового сканирования. Кроме того, используются определенные схемы сканирования, чтобы контроллер 103 мог определить, слева или справа от устройства 10 находится обнаруженный предмет. Хотя в качестве примера показан лазерный датчик 200, можно использовать другие технологии зондирования, среди которых ультразвуковое, инфракрасное зондирование и т.д. Например, ультразвуковые датчики, расположенные по бокам устройства 10, могут определять буферные зоны левого и правого поворота 132А и 132В. Определение типов датчиков, устанавливаемых на устройстве 10, зависит от определенных условий работы устройства 10. Кроме того, лазерный датчик 200 или один или несколько дополнительных датчиков могут использоваться для определения других зон обнаружения, например зон останова, ограничения скорости и т.д. Лазерный датчик 200 (либо один или несколько дополнительных датчиков) может определять «зону останова» и/или «зону понижения скорости», что подробно описано в данном документе. Например, при определении одной зоны останова и обнаружения предмета в зоне останова, которая может простираться, например, на 1,2 метра вперед от движущегося вперед устройства 10, контроллер 103 может дать устройству 10 команду остановиться, что подробно описано в настоящем документе. В дополнение или в качестве альтернативы, если предмет обнаруживается в зоне медленного передвижения, контроллер 103 может дать устройству 10 команду замедлиться. Следует подчеркнуть, что в соответствии с данным вариантом осуществления изобретения предпочтительнее определить зону останова, не определяя зоны замедления. Более того, устройство 10 может предусматривать один или более датчиков наличия нагрузки 53, см. фиг.12. В датчиках наличия нагрузки 53 используется бесконтактная или контактная технология, например контактный выключатель, датчик давления, ультразвуковой датчик, оптическое устройство распознавания, инфракрасный датчик или другая соответствующая технология, определяющая наличие конструкции с грузом 55, т.е. паллеты или другой платформы, ящика и т.п. Контроллер 103 может отказаться выполнять команду движения, если один или несколько датчиков наличия нагрузки 53 указывают на то, что грузовая платформа 55 находится не в заданном положении. Кроме того, контроллер 103 может взаимодействовать с переключателем тормоза 108, чтобы остановить устройство 10, если датчики наличия нагрузки 53 обнаруживают отклонение положения грузовой платформы 55 от заданного. Следует понимать, что можно использовать любое количество зон обнаружения, и используемые зоны обнаружения могут частично совпадать, или же данные зоны могут быть отдельными, взаимоисключающими. В зависимости от используемых видов датчиков и технологий обработки данных датчиками возможны различные форматы вводных сигналов в контроллер 103, означающих наличие предмета в буферной зоне рулевого управления 132А и 132В. Еще одним примером является возможность использования в первой и второй буферных зонах рулевого управления 132А и 132В как ультразвуковых, так и одного или нескольких лазерных датчиков. Например, лазерный датчик 200 можно использовать для контроля избыточным кодом с целью подтверждения надлежащего обнаружения предмета ультразвуковыми датчиками в буферной зоне левого или правого поворота 132А и 132В и наоборот. Кроме того, ультразвуковые датчики можно использовать для обнаружения предмета в буферной зоне левого или правого поворота 132А и 132В, а лазерный датчик 200 можно применять для распознавания или иного определения местоположения предмета с целью проверки того, в какой именно буферной зоне - левого поворота (132А) или правого поворота (132В) - был обнаружен предмет. В качестве альтернативы могут использоваться любые другие схемы и конфигурации. Если предупреждение буферной зоны рулевого управления означает, что предмет обнаружен в буферной зоне левого поворота 132А, в точке 156 применяется процедура корректировки рулевого управления, включающая расчет корректировки угла поворота для разворота устройства 10 направо в соответствии с первой совокупностью параметров. В качестве примера, а не в качестве ограничения, корректировка угла правого поворота в точке 156 может состоять в развороте устройства 10 направо до угла правого поворота. При этом угол правого поворота может быть фиксированным или переменным. Например, контроллер 103 может дать контроллеру рулевого управления 112 команду увеличения угла до необходимой величины, например на 8-10 градусов вправо. При увеличении угла поворота до фиксированной величины не происходит резкого изменения угла поворота рулевого колеса, что приводит к более равномерной работе. В алгоритме учитывается расстояние, на которое устройство перемещается под скорректированным углом поворота. Данное расстояние может быть функцией периода времени, в течение которого подается соответствующий буферный сигнал рулевого управления. В соответствии с различными объектами настоящего изобретения можно управлять изменением угла поворота управляемых колес, чтобы добиться, например, фиксированной корректировки угла поворота как функции общего пройденного расстояния. Расстояние, на которое устройство перемещается в процессе выполнения корректировки угла поворота, определяется на основании нескольких параметров. Например, расстояние, пройденное в процессе выполнения корректировки угла поворота, может представлять собой расстояние, пройденное устройством 10 до того момента, пока обнаруженный предмет не был удален из соответствующей левой буферной зоны обнаружения 132А. Общее пройденное расстояние может также представлять собой расстояние, пройденное до блокировки по времени, обнаружения другого предмета в какой-либо из буферных зон или зон обнаружения, либо до превышения заданного максимального угла поворота. После выполнения корректировки угла правого поворота в точке 156 посредством манипулирования устройством 10 таким образом, чтобы в левой буферной зоне обнаружения 132А не находилось никаких предметов, в точке 158 выполняется операция компенсации угла левого поворота. Операция компенсации угла левого поворота в точке 158 может представлять собой, например, противодействие с целью регулировки ориентации устройства 10 до нужного направления. Например, операция компенсации угла левого поворота состоит в прохождении устройством 10 под выбранным или определенным иным образом углом определенного расстояния, составляющего некий процент от общего ранее пройденного расстояния. Угол левого поворота, используемый для операции компенсации левого поворота, может быть фиксированным или переменным и может быть идентичным или отличным от угла поворота, используемого для корректировки угла правого поворота в точке 156. В качестве примера, но не в качестве ограничения расстояние, используемое для выполнения операции компенсации левого поворота в точке 158, может составлять примерно от четверти до половины общего расстояния, пройденного в процессе корректировки правого поворота в точке 156. Аналогичным образом, угол левого поворота, используемый для компенсации левого поворота, может составлять около половины величины угла, используемого для корректировки правого поворота в точке 156. Так, предположим, что угол правого поворота составляет 8 градусов, а общее расстояние, пройденное в процессе корректировки рулевого управления, составляет 1 метр. В данном примере компенсация левого поворота может составить примерно половину корректировки правого поворота или -4 градуса и осуществляться на расстоянии от 1/4 до 1/2 метра. Можно выбирать расстояние и/или угол для операции компенсации угла левого поворота в точке 158 с целью амортизации отскока устройства 10 в процессе его перемещения по соответствующей траектории и обхода обнаруженных препятствий. Например, если угол поворота устройства 10 корректируется на фиксированную величину (в градусах) на протяжении определенной длины пути, контроллер 103 способен определить, насколько изменился соответственно угол устройства, и выполнить операцию компенсации левого поворота в точке 158, чтобы скорректировать угол до исходного или другого необходимого направления. Таким образом, устройство 10 будет не зигзагообразно двигаться по проходу, а перемещаться практически прямо по центру прохода, не требуя от оператора постоянного позиционирования. Кроме того, величина компенсации левого поворота в точке 158 может изменяться в зависимости от различных параметров, используемых для корректировки правого поворота в точке 156. Соответственно, если предупреждение буферной зоны рулевого управления означает, что предмет обнаружен в буферной зоне правого поворота 132В, в точке 160 применяется процедура корректировки рулевого управления, включающая расчет корректировки угла поворота для разворота устройства 10 налево в соответствии со второй совокупностью параметров. В качестве примера, а не в качестве ограничения, корректировка угла левого поворота в точке 160 может состоять в развороте устройства 10 налево до угла левого поворота. При этом операция корректировки левого поворота в точке 160 может выполняться аналогично процедуре, описанной выше для точки 156, только в точке 156 осуществляется корректировка вправо, а в точке 160 - влево. Аналогичным образом, после выполнения корректировки угла левого поворота в точке 160 посредством манипулирования устройством 10 таким образом, чтобы в правой буферной зоне обнаружения 132В не находилось никаких предметов, в точке 162 выполняется операция компенсации угла правого поворота. Операция компенсации угла правого поворота в точке 162 может представлять собой, например, противодействие с целью регулировки ориентации устройства 10 до нужного направления посредством процедуры, аналогичной описанной для точки 158 за исключением того, что в точке 158 выполняется операция компенсации левого поворота, а в точке 162 - правого. После выполнения компенсации поворота в точке 158 или 162 устройство может вернуться к движению прямо, т.е. к 0 градусам в точке 164, и весь процесс начинается с начала до тех пор, пока не будет обнаружен еще один предмет в какой-либо из буферных зон рулевого управления 132А и 132В. Алгоритм можно изменять в соответствии с различными вариантами осуществления логических схем управления и/или настраивать машины под различные предполагаемые условия. Например, возможно, что второй предмет переместится в буферную зону рулевого управления 132А или 132В в процессе выполнения компенсации поворота. При этом устройство 10 может предпринимать несколько попыток корректировки рулевого управления для обхода второго предмета. Например, если предмет(ы) одновременно обнаруживается в буферных зонах левого и правого поворота 132А и 132В, контроллер 103 можно запрограммировать на поддержание перемещения устройства 10 в текущем направлении (т.е. при угле поворота в ноль градусов) до тех пор, пока из одной или нескольких буферных зон рулевого управления 132А, 132В не будут устранены препятствия или пока активация соответствующих зон обнаружения не приведет к остановке устройства 10. В соответствии с прочими объектами настоящего изобретения пользователь и/или представитель сервисного центра может настраивать параметры отклика алгоритма корректировки угла поворота под требования заказчика. Например, представитель сервисного центра может иметь доступ к программным средствам для загрузки настраиваемых переменных в контроллер 103 для корректировки рулевого управления. Или же оператор погрузочно-разгрузочного устройства может иметь средства управления, позволяющие ему вводить настраиваемые параметры в контроллер посредством потенциометров, кодировщиков, программируемых пользовательских интерфейсов и т.д. Результат работы алгоритма, показанного на Фиг.11, может состоять, например, в наличии выхода, определяющего значение корректировки угла поворота и соединенного через контроллер 103 с соответствующим механизмом управления устройства 10. Например, значение корректировки рулевого управления может представлять собой значение +/-, соответствующее левому или правому повороту. Данное значение передается в блок управления погрузочно-разгрузочным устройством, контроллер рулевого управления 112, как показано на фиг.2, или другой надлежащий контроллер. Кроме того, могут изменяться прочие параметры, т.е. регулировка эксплуатационных характеристик может включать корректировку угла поворота, степень изменения угла поворота, размер буферной зоны обнаружения/радиус действия каждой буферной зоны рулевого управления, скорость движения устройства в процессе корректировки угла поворота и т.д. Ссылаясь на фиг.12, предположим в качестве примера, что устройство 10 перемещается в ответ на получение команды движения от беспроводного устройства дистанционного управления и что до того, как устройство 10 сможет пройти заданное расстояние, оно перемещается в положение, где опора стеллажа 172 и соответствующая паллета 174 находятся в буферной зоне левого поворота 132А. В соответствии с типовым алгоритмом, изображенным на фиг.11, устройство 10 при помощи контроллера 103 может выполнить обход препятствий посредством ввода алгоритма корректировки угла поворота для разворота устройства вправо. Например, контроллер 103 может рассчитать или иным образом найти или получить угол корректировки, передаваемый контроллеру рулевого управления 112 для разворота управляемых колес устройства 10. Устройство 10 продолжает корректировать угол поворота до наступления какого-либо события, например удаления предмета, т.е. когда сканирующий лазер или датчик, использующий другую технологию зондирования, больше не обнаруживает предметов в буферной зоне левого поворота 132. Предположим, что за время корректировки угла поворота, зафиксированного на 8 градусах, устройство 10 прошло расстояние, равное половине метра. После исчезновения сигнала буферной зоны левого поворота активируется противодействие для компенсации изменений в направлении, вызванных корректировкой рулевого управления. Например, посредством компенсации рулевого управления можно развернуть устройство 10 влево на 4 градуса, при этом пройденное расстояние составит четверть метра. Для очень узких проходов датчики буферной зоны левого/правого поворота могут издавать сигналы чаще в сравнении с относительно широкими проходами. Различные значения корректировки угла поворота и соответствующего противодействия можно определять эмпирически, либо углы, темпы изменений, общее расстояние и прочие параметры могут быть рассчитаны, смоделированы или получены иным образом. В примере система пытается удерживать устройство 10 по центру прохода по мере его перемещения в ответ на получение соответствующей команды движения, посылаемой беспроводным способом передатчиком 70. Кроме того, ослабляется отскок, измеряемый расстоянием от центральной линии складского прохода. Могут возникнуть определенные условия, когда устройству 10 может понадобиться вмешательство оператора для осуществления маневров с целью обхода определенных предметов, находящихся на пути движения. Описание настоящего изобретения представлено в целях пояснения и описания, но не является исчерпывающим и никоим образом не ограничивает изобретения в той форме, в которой оно раскрывается. Например, любые характеристики объектов и варианты осуществления изобретения, описанные в отношении работы с дистанционным управлением, также относятся к объектам и вариантам осуществления изобретения, предназначенным для работы под непосредственным управлением оператора, т.е. в отсутствие дистанционного управления и наоборот. Более того, если по описанию контроль определенного параметра погрузочно-разгрузочного устройства относится к конкретной зоне обнаружения (например, к третьей), контролируемой как минимум одним бесконтактным датчиком препятствий, данный параметр также может относиться к другой зоне обнаружения кроме указанной (например, ко второй, первой или четвертой зонам обнаружения) и так далее. Если зона обнаружения описывается в данном документе как «область», следует понимать, что хотя датчики могут быть направленными, зону также можно описывать термином «пространство», которое никоим образом не ограничивает изобретения. При этом лица, имеющие опыт в данной сфере, могут осуществлять различные модификации и вносить изменения, не отклоняясь от объема изобретения, определяемого прилагаемой формулой изобретения. После подробного описания изобретения, являющегося предметом настоящей заявки, а также исходя из вариантов его осуществления, становится очевидной возможность выполнения модификаций и внесения изменений без отклонения от объема изобретения, определяемого прилагаемой формулой изобретения.
Реферат
Настоящее изобретение относится в целом к погрузочно-разгрузочным устройствам и в частности к системам и способам, объединяющим данные по зонам обнаружения в дополнительные беспроводные средства дистанционного управления погрузочно-разгрузочными устройствами. Технический результат - улучшение характеристик эксплуатации погрузочно-разгрузочного устройства. Способ эксплуатации погрузочно-разгрузочного устройства использует множественные зоны обнаружения, заключающийся в:- определении первой зоны обнаружения, покрывающей область, как минимум частично расположенную спереди от движущегося вперед устройства;- определении второй зоны обнаружения, покрывающей область, как минимум частично расположенную спереди от движущегося вперед устройства;- выполнении первого действия, если в первой зоне обнаружения было определено недопустимое препятствие; и выполнении второго действия, отличного от первого, если во второй зоне обнаружения было определено недопустимое препятствие.Способ предусматривает, что первая и вторая зоны обнаружения определяются при помощи как минимум одного бесконтактного датчика препятствий, передающего информацию на контроллер, настроенный на управление как минимум одним параметром погрузочно-разгрузочного устройства. 5 н. и 33 з.п. ф-лы, 12 ил.
Формула
- силовой установки (14), приводящей устройство (10) в движение;
- грузозахватного приспособления (12), закрепленного на силовой установке (14);
- как минимум одного бесконтактного датчика препятствий (76) на устройстве (10), способного определять не менее двух зон обнаружения; и
- контроллера (103), настроенного на управление как минимум одним параметром устройства (10), кроме того, контроллер (103) настраивается на получение информации как минимум от одного датчика препятствий (76) с целью:
- выполнения первого действия, если устройство (10) перемещается, а предмет обнаруживается в первой из зон обнаружения; и
- выполнения второго действия, отличного от первого, если устройство (10) перемещается, а предмет обнаруживается во второй из зон обнаружения; причем, по меньшей мере, один из бесконтактных датчиков обнаружения препятствий (76) на устройстве (10) отправляет и принимает сигнал по обнаружению объектов в, по меньшей мере, двух зонах обнаружения.
силовую установку (14), приводящую устройство (10) в движение;
грузозахватное приспособление (12), закрепленное на силовой установке (14);
приемник (102) на устройстве (10) для приема сигналов от соответствующего устройства дистанционного управления (70), при этом передаются как минимум сигналы первого типа, означающие команду движения, побуждающую устройство (10) к перемещению;
не менее одного бесконтактного датчика препятствий (76), установленного на устройстве (10) и способного определять как минимум две зоны обнаружения, каждая из которых покрывает область, как минимум частично расположенную спереди от движущегося вперед устройства (10), если устройство (10) перемещается на основании команды движения, поступившей от устройства дистанционного управления; и
контроллер (103), связывающийся с приемником и системой регулирования тяги (106) устройства (10) с целью обеспечения дистанционного управления устройством (10) в ответ на получение команды движения от устройства дистанционного управления (70); при этом контроллер (103) получает данные как минимум от одного датчика препятствий (76) и настраивается на:
выполнение первого действия в случае, когда устройство (10) перемещается в ответ на команду движения, отправленную устройством дистанционного управления, а препятствие обнаруживается в первой из зон обнаружения; и
выполнение второго действия, отличного от первого, в случае, когда устройство (10) перемещается в ответ на команду движения, отправленную устройством дистанционного управления, а препятствие обнаруживается во второй из зон обнаружения;
причем, по меньшей мере, один из бесконтактных датчиков обнаружения препятствий (76) на устройстве (10) отправляет и принимает сигнал по обнаружению объектов в, по меньшей мере, двух зонах обнаружения.
контроллер (103) связывается с системой регулирования тяги (106) устройства (10);
первая из зон обнаружения является зоной останова (78A);
вторая из зон обнаружения является зоной первой скорости (78В);
первым действием контроллера (103) является останов;
вторым действием контроллера (103) является понижение скорости до первой;
контроллер (103) настраивается на выполнение первого действия для останова устройства (10), если устройство (10) находится в движении, а препятствие обнаруживается в зоне останова (78A); и
контроллер настраивается на выполнение второго действия для понижения скорости движения устройства (10) до первой заданной скорости, если устройство (10) передвигается на скорости, превышающей первую заданную скорость, а препятствие обнаруживается в зоне первой скорости (78B).
помимо необходимого минимума в две зоны обнаружения предусмотрена третья зона обнаружения, представляющая собой зону второй скорости (78C); и
контроллер (103) настраивается на выполнение третьего действия для понижения скорости движения устройства (10) до второй заданной скорости, если устройство (10) передвигается на скорости, превышающей вторую заданную скорость, а препятствие обнаруживается в зоне второй скорости (78C).
контроллер (103) настраивается на отказ от управления устройством (10), если препятствие обнаруживается в зоне останова (78А) до того, как устройство (10) начнет перемещаться.
каждая зона обнаружения соотносится с соответствующей зоной контроля скорости и соответствующей максимальной скоростью; и
контроллер также настраивается на ограничения скорости передвижения устройства (10) до заданной максимальной скорости в соответствующей зоне контроля скорости вследствие обнаружения препятствия в данной зоне скорости.
как минимум две зоны обнаружения включают в себя множество зон с различной величиной корректировки угла поворота; и
контроллер (103) также настраивается на определенную величину корректировки угла поворота для каждой зоны корректировки угла поворота.
приемник (102) на устройстве (10) для приема сигналов от соответствующего устройства дистанционного управления (70), при этом передаются как минимум сигналы первого типа, означающие команду движения, побуждающую устройство (10) к перемещению; и
контроллер (103), связывающийся с приемником и системой регулирования тяги (106) устройства (10) с целью обеспечения дистанционного управления устройством (10) в ответ на получение команды движения от устройства дистанционного управления (70).
контроллер (103) также настраивается на увеличение скорости движения устройства (10) до заданной максимальной скорости, превышающей первую заданную скорость, если устройство (10) перемещается в ответ на команду движения, полученную от устройства дистанционного управления, а в зоне останова (78A) не обнаружено никаких препятствий, равно как в зоне первой скорости (78B).
как минимум один датчик присутствия (58) для определения нахождения оператора на устройстве (10); при этом контроллер (103) настраивается на дистанционное управление устройством (10) в случае, когда датчик присутствия (58) не обнаруживает оператора на устройстве (10).
устройства дистанционного управления (70), вручную применяемого оператором для беспроводной передачи как минимум сигналов первого типа, означающих команду движения, побуждающую устройство (10) к перемещению на заданное расстояние;
приемника (102) для установки на устройстве (10), получающего сигналы от соответствующего устройства дистанционного управления (70);
как минимум одного бесконтактного датчика препятствий (76), устанавливаемого на устройстве и способного определять как минимум две зоны обнаружения, каждая из которых покрывает область, как минимум частично расположенную спереди от движущегося вперед устройства (10), если устройство (10) перемещается на основании команды движения, поступившей от устройства дистанционного управления; и
контроллера (103) для устройства, связывающегося с приемником и системой регулирования тяги устройства (10) с целью дистанционного управления устройства (10) в ответ на получение команды движения от устройства дистанционного управления (70); при этом контроллер (103) получает данные как минимум от одного датчика препятствий (76) и настраивается на:
выполнение первого действия в случае, когда устройство (10) перемещается в ответ на команду движения, отправленную устройством дистанционного управления, а препятствие обнаруживается в первой из зон обнаружения; и
выполнение второго действия, отличного от первого, в случае, когда устройство (10) перемещается в ответ на команду движения, отправленную устройством дистанционного управления, а препятствие обнаруживается во второй из зон обнаружения;
причем, по меньшей мере, один из бесконтактных датчиков обнаружения препятствий (76) на устройстве (10) отправляет и принимает сигнал по обнаружению объектов в, по меньшей мере, двух зонах обнаружения.
первая из зон обнаружения представляет собой зону останова (78A);
вторая из зон обнаружения представляет собой зону первой скорости (78B);
первым действием контроллера (103) является останов;
вторым действием контроллера (103) является понижение скорости до первой; контроллер (103) настраивается на выполнение первого действия для останова устройства (10), если устройство (10) перемещается на основании полученной от устройства дистанционного управления команды движения, а препятствие обнаруживается в зоне останова (78A); и
контроллер (103) настраивается на выполнение второго действия для снижения скорости движения устройства (10) до первой заданной скорости, если устройство (10) перемещается на основании полученной от устройства дистанционного управления команды движения на скорости, превышающей первую заданную скорость, а препятствие обнаруживается в зоне первой скорости (78B).
кроме необходимого минимума, составляющего две зоны обнаружения, предусмотрена третья зона обнаружения, представляющая собой зону второй скорости (78C); и
контроллер (103) настраивается на выполнение третьего действия для снижения скорости движения устройства (10) до второй заданной скорости, если устройство (10) перемещается на основании полученной от устройства дистанционного управления команды движения на скорости, превышающей вторую заданную скорость, а препятствие обнаруживается в зоне второй скорости (78C).
контроллер (103) настраивается на отказ от дистанционного управления устройством (10) в ответ на команду движения, полученную от устройства дистанционного управления, если препятствие обнаруживается в зоне останова (78A) до того, как устройство (10) начнет перемещаться.
контроллер (103) настраивается на увеличение скорости движения устройства (10) до заданной максимальной скорости, превышающей первую заданную скорость, если устройство (10) перемещается в ответ на команду движения, полученную от устройства дистанционного управления, а в зоне останова (78A) не обнаружено никаких препятствий, равно как в зоне первой скорости (78B).
контроллер (103) также настраивается на изменение как минимум одного параметра устройства кроме скорости в ответ на обнаружение препятствия как минимум в одной зоне обнаружения.
как минимум одним из бесконтактных датчиков препятствий (76) является лазерный датчик.
как минимум один датчик присутствия (58) для определения нахождения оператора на устройстве (10); при этом контроллер (103) настраивается на дистанционное управление устройством (10) в случае, когда датчик присутствия (58) не обнаруживает оператора на устройстве (10).
контроллер (103) также связывается с контроллером рулевого управления (112) устройства (10);
как минимум одной из зон обнаружения является зона корректировки угла поворота; и контроллер (103) настраивается на корректировку угла поворота при обнаружении препятствия в соответствующей зоне корректировки угла поворота.
как минимум две зоны обнаружения включают в себя множество зон с различной величиной корректировки угла поворота; и
контроллер (103) также настраивается на определенную величину корректировки угла поворота для каждой зоны корректировки угла поворота.
как минимум одного бесконтактного датчика препятствий (76), способного определять как минимум две зоны обнаружения, каждая из которых покрывает область, как минимум частично расположенную спереди от движущегося вперед устройства (10), если устройство (10) находится в движении; и
контроллера (103), настраиваемого на связь и контроль как минимум одного параметра устройства (10); при этом контроллер (103) получает данные как минимум от одного датчика препятствий (76) и настраивается на:
выполнение первого действия в случае, когда устройство (10) находится в движении, а препятствие обнаруживается в первой из зон обнаружения; и
выполнение второго действия, отличного от первого, в случае, когда устройство (10) находится в движении, а препятствие обнаруживается во второй из зон обнаружения;
причем, по меньшей мере, один бесконтактный датчик обнаружения препятствий (76) на устройстве (10) отправляет и принимает сигнал по обнаружению объектов в, по меньшей мере, двух зонах обнаружения.
определении первой зоны обнаружения, покрывающей область, как минимум частично расположенную спереди от движущегося вперед устройства (10);
определении второй зоны обнаружения, покрывающей область, как минимум частично расположенную спереди от движущегося вперед устройства (10);
выполнении первого действия, если в первой зоне обнаружения было определено недопустимое препятствие; и
выполнении второго действия, отличного от первого, если во второй зоне обнаружения было определено недопустимое препятствие;
при этом первая и вторая зоны обнаружения определяются при помощи как минимум одного бесконтактного датчика препятствий (76), установленного на устройстве (10), причем, по меньшей мере, один из бесконтактных датчиков обнаружения препятствий (76) на устройстве (10) отправляет и принимает сигнал по обнаружению объектов в, по меньшей мере, двух зонах обнаружения.
упомянутое определение первой зоны обнаружения представляет собой определение зоны останова (78A);
упомянутое определение второй зоны обнаружения представляет собой определение зоны первой скорости (78B);
упомянутое выполнение первого действия представляет собой останов устройства (10), если устройство (10) находится в движении, а препятствие обнаруживается в зоне останова (78A); и
упомянутое выполнение второго действия представляет собой уменьшение скорости движения устройства (10) до первой заданной скорости, если устройство (10) перемещается на скорости, превышающей первую заданную скорость, а препятствие обнаруживается в зоне первой скорости (78В).
определении третьей зоны обнаружения, покрывающей область, как минимум частично расположенную спереди от движущегося вперед устройства (10); при этом третья зона обнаружения представляет собой зону второй скорости (78C); и
уменьшении скорости движения устройства (10) до второй заданной скорости, превышающей первую заданную скорость, если устройство (10) перемещается на скорости, превышающей вторую заданную скорость, а препятствие обнаруживается в зоне второй скорости (78C).
соотнесении каждой зоны обнаружения с соответствующей зоной контроля скорости и соответствующей максимальной скоростью; и
ограничении скорости движения устройства до заданной максимальной скорости в соответствующей зоне контроля скорости при обнаружении препятствия в данной зоне скорости.
Комментарии