Вертолет с одним несущим винтом и способ компенсации реактивного момента несущего винта одновинтового вертолета - RU2086476C1
Код документа: RU2086476C1
Чертежи




Описание
Изобретение относится к вертолетам с одним несущим винтом, содержащим систему компенсации реактивного момента несущего винта, включающую хвостовой винт, проводимый во вращение тем же, что и несущий винт средством, систему управления хвостовым винтом и по меньшей мере одну управляемую аэродинамическую поверхность направления, такую как закрылок киля или поворотный киль.
Изобретение также касается способов компенсации реактивного момента несущего винта одновинтового вертолета.
Данное изобретение применимо и к вертолетам с хвостовым или рулевым винтом килевого типа в кольцевом обтекателе.
Известно, что у вертолетов, снабженных одним несущим винтом, фюзеляж имеет тенденцию, реагируя на крутящий момент, приложенный к указанному несущему винту, поворачиваться в направлении, противоположном направлению вращения последнего. Кроме того, известно, что для компенсации реактивного момента, которому подвергается фюзеляж, обычно предусматривают вспомогательный рулевой винт, способный вызывать поперечную тягу и приводимый во вращение от силовой установки несущего винта. Таким образом, вспомогательный рулевой винт отбирает часть мощности этой силовой установки.
Из этого следует, что с точки зрения летных характеристик вертолета выгодно содействовать вспомогательному рулевому винту в его функции боковой стабилизации фюзеляжа.
Известен вертолет с одним несущим винтом, содержащий систему компенсации реактивного момента несущего винта, включающую хвостовой винт, приводимый во вращение тем же, что и несущий винт, средством, систему управления хвостовым винтом и по меньшей мере одну управляемую аэродинамическую поверхность направления, выполненную с возможностью поворота и образования в результате этого поперечной аэродинамической силы, компенсирующей реактивный момент несущего винта (патент США, N 2369652, кл. В 64 С 27/54, 1941).
Поскольку усилие, необходимое для компенсации реактивного момента несущего винта, изменяется в зависимости от скорости, а также от других параметров полета, оптимальная разгрузка рулевого винта практически возможна только в каком-то одном расчетном режиме полета. Обычно оптимизацию осуществляют для горизонтального крейсерского полета с экономичной крейсерской скоростью. Тогда установка киля выбирается так, чтобы сила, развиваемая на киле, разгружала в большей части или полностью рулевой винт на выбранной крейсерской скорости.
Как только условия полета (горизонтальная скорость, вертикальная скорость) или конфигурация вертолета (масса, внешние подвески) меняются, первоначальная регулировка киля перестает быть оптимальной и появляется некоторая потеря летных характеристик. Кроме того, в полете со снижением в режиме авторотации сила на киле становится излишней (реактивный момент несущего винта почти нулевой) и должна быть уравновешена отрицательной тягой, получаемой от рулевого винта. Эта относительная тяга ухудшает летные характеристики и значительно уменьшает располагаемый диапазон управления вертолета по рысканию.
Можно снижать нагрузку упомянутого рулевого винта в поступательном полете с помощью аэродинамической силы, действующей на киль, специально предусмотренный в задней части вертолета. Такая сила обычно обеспечивается путем выбора для киля искривленного профиля и его установки под некоторым углом к плоскости симметрии фюзеляжа. Однако для фиксированного положения киля сила, полученная при полете вертолета с нулевым скольжением, зависит только от динамического давления на киле и поэтому не модулируется.
Чтобы избежать неудобств и ограничений, появляющихся при использовании неподвижного киля разгрузки, используют отклоняемый закрылок киля. Однако такой закрылок управляется вручную и предусматривается установкой гироскопической системы управления тягой двигателя несущего винта таким образом, чтобы контролировать мощность, развиваемую двигателем, для удержания равновесия моментов и исключения слишком быстрых изменений мощности двигателя, за которыми не успевали бы необходимые перенастройки средств компенсации реактивного момента несущего винта.
Однако такая система компенсации реактивного момента несущего винта обладает весьма существенным недостатком, так как подчиняет управление несущего винта управлению средствами компенсации реактивного момента. Кроме того, она сложна, так как предполагает использование гироскопической системы.
В основу изобретения положена задача создания вертолета с одним несущим винтом и способа компенсации реактивного момента несущего винта одновинтового вертолета, которые позволили бы устранить вышеперечисленные недостатки без использования сложных систем.
Поставленная задача решается за счет того, что вертолет с одним несущим винтом снабжен средствами для автоматического управления углом поворота аэродинамической поверхности направления в зависимости от угла общего шага несущего винта и скорости (V) поступательного горизонтального движения вертолета. Предпочтительный пример -выполнение средств для автоматического управления углом поворота аэродинамической поверхности направления и системы управления хвостовым винтом с возможностью их раздельного функционирования.
Также предпочтительно, чтобы средства для автоматического управления углом поворота аэродинамической поверхности направления и система управления хвостовым винтом были выполнены с возможностью функциональной связи между ними.
Это предусмотрено для того, чтобы распределение общего действия компенсации реактивного момента могло быть оптимизировано.
Кроме того, предпочтительно, чтобы функциональная связь между средством для автоматического управления углом поворота аэродинамической поверхности направления и системой управления хвостовым винтом была выполнена с возможностью измерения наряду с величиной общего шага несущего винта и скорости (V) поступательного горизонтального движения а также и других параметров, таких как угловая скорость рысканья (r), коэффициент боковой перегрузки (ny), плотность воздуха ρ, углов курса j, тангажа q и крена f, а также текущего значения шага хвостового винта для получения с учетом изменения этих параметров углов аэродинамической поверхности направления и оптимального угла шага хвостового винта.
Таким образом, указанная аэродинамическая поверхность направления может приводиться в движение так, чтобы иметь практически нулевую тягу вспомогательного рулевого винта, обеспечивая при этом путевую балансировку вертолета. Упомянутая аэродинамическая поверхность направления может быть выполнена в виде закрылки киля или, например, в виде поворотного киля.
При этом вертолет согласно изобретению содержит несколько аэродинамических поверхностей направления и средств автоматического управления углом поворота этих поверхностей и дополнительно снабжен боковыми килями, выполненными с возможностью разгрузки хвостового винта, причем боковые кили снабжены подвижными закрылками, приводимыми в действие средствами автоматического управления углом поворота.
Кроме того, боковые кили выполнены подвижными и установлены с возможностью приведения в действие средствами автоматического управления углом поворота.
Предпочтительно также, чтобы аэродинамическая поверхность направления была выполнена в виде двойного заднего киля, каждый элемент которого снабжен подвижным закрылком, приводимым в действие средствами автоматического управления углом поворота.
Согласно предпочтительному примеру выполнения аэродинамической поверхности направления может быть также выполнена в виде двойного заднего киля, каждый элемент которого выполнен подвижным и установлен с возможностью приведения в действие средствами автоматического управления углом поворота.
Положенная в основу изобретения задача согласно способу компенсации реактивного момента несущего винта одновинтового вертолета, при котором создают боковую силу, действующую на его корпус, с помощью хвостового винта и управляемой аэродинамической поверхности направления, решается за счет того, что на подготовительном этапе формируют базу данных, содержащую объединенные в группы из трех параметров значения соответственно скорости поступательного горизонтального движения вертолета, угла общего шага несущего винта и угла поворота аэродинамической поверхности направления, для которых боковая тяга, развиваемая хвостовым винтом, близка к нулю, в полете измеряют скорость поступательного горизонтального движения вертолета и угла общего шага несущего винта и задают аэродинамической поверхности направления угол отклонения, величина которого по меньшей мере близка к значению угла поворота аэродинамической поверхности направления в той группе из базы данных, в которой значения скорости поступательного горизонтального движения и угла общего шага по крайней мере близки к соответствующим значениям измерительных величин.
Преимущественно на подготовительном этапе значения каждого из трех параметров в базе данных определяют, используя функциональную зависимость боковой тяги хвостового винта от скорости поступательного горизонтального движения при постоянном угле поворота аэродинамической поверхности направления и функциональную зависимость угла общего шага несущего винта от скорости поступательного горизонтального движения вертолета.
Для использования полученной таким образом информации формируют базу данных в виде таблицы с двумя входами и одним выходным параметрами, при этом выходными параметрами являются величины скорости поступательного горизонтального движения и угла общего несущего винта, а выходным параметром является величина угла поворота аэродинамической поверхности направления.
Однако предпочтительно, чтобы значения параметра базы данных, соответствующего углу поворота аэродинамической поверхности направления, определялись с помощью аналитической зависимости параметра от скорости поступательного горизонтального движения вертолета и угла общего шага несущего винта.
При этом в математическом виде аналитической зависимости каждый член является произведением скорости поступательного горизонтального движения на степень угла общего шага несущего винта.
Для упрощения расчетов математический вид аналитической зависимости представляют графически в системе осей, одна из которых соответствует скорости поступательного горизонтального движения вертолета, а другая углу поворота аэродинамической поверхности направления, при этом графически представляемую зависимость изображают рядом кривых, аппроксимированных отрезками прямых на соответствующих интервалах оси упомянутой скорости, где каждая аппроксимированная кривая соответствует некоторой величине общего шага.
Тогда предпочтительно на каждом из упомянутых интервалов величин скорости поступательного, горизонтального движения вертолета угол поворота аэродинамической поверхности направления определять как линейную функцию угла общего шага и скорости поступательного движения.
На фиг.1 схематически изображен вертолет вертолета согласно изобретению, вид сбоку; на фиг.2 то же,вид сверху; на фиг.3 разрез заднего киля вертолета по линии III-III согласно фиг.1 в увеличенном масштабе; на фиг.4 - схематически проиллюстрирован принцип изобретения; на фиг.5 блок-схема первого примера выполнения способа реализации средств компенсации реактивного момента несущего винта; на фиг.6 графическая иллюстрация закона отклонения закрылка киля в зависимости от поступательной скорости и угла общего шага; на фиг.7 и 8 соответственно вид сбоку и вид сверху задней концевой части с двойным килем; на фиг.9 блок-схема второго примера способа практической реализации средств компенсации реактивного момента несущего винта.
Вертолет 1 (фиг. 1 и 2) содержит фюзеляж 2, в передней части которого расположена кабина летчика 3. Промежуточная часть 4 указанного фюзеляжа имеет силовую установку 5 для привода во вращение несущего винта 6, состоящего из лопастей 7. Фюзеляж в задней части переходит в хвост 8, в свободной концевой части которого расположен киль 9. Кроме того, в задней оконечности хвоста 8, например в основании киля 9, предусмотрен хвостовой винт 10 с изменяемым шагом, приводимый во вращение от силовой установки 5 с помощью поворотного вала 11 и содержащий лопасти 12. Преимущественно указанный хвостовой винт 10 заключен в кольцевой обтекатель, причем обтекатель образован основанием киля 9.
Известно, что если несущий винт 6 поворачивается в направлении стрелки F1(фиг.2), вертолет вовлекается во вращение в противоположном направлении F2 силой реакции. Хвостовой винт 10 имеет целью производить боковую тягу YRA, противодействующую повороту фюзеляжа в направлении F2 и амплитуда которой управляется шагом лопастей 12.
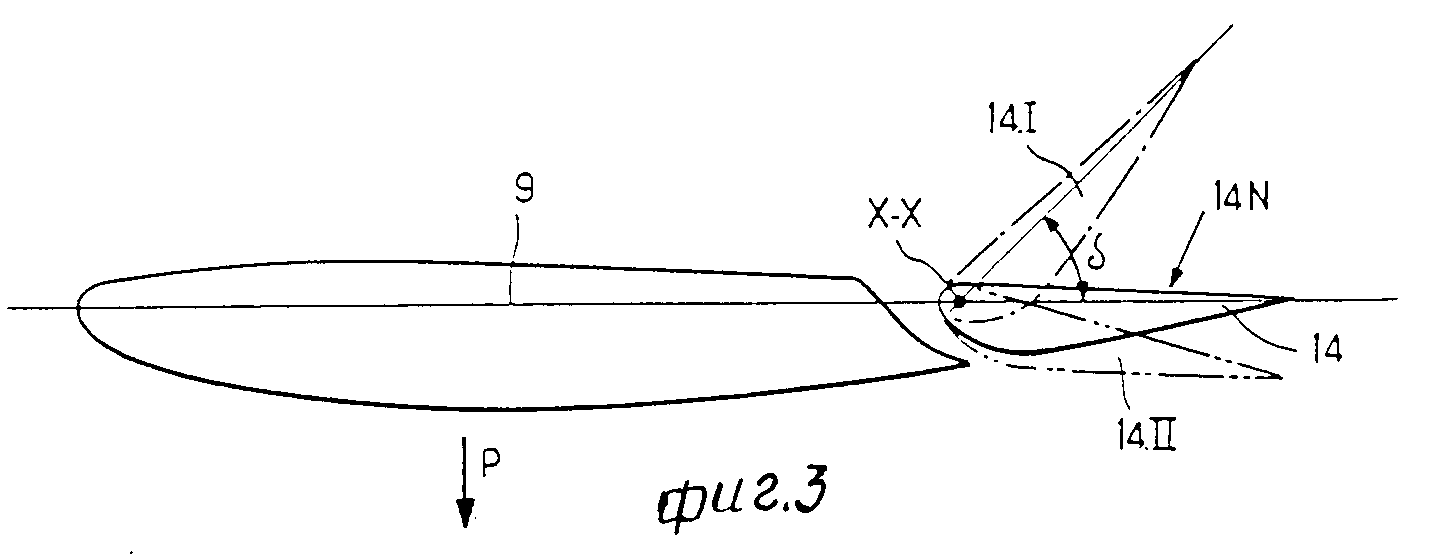
Чтобы помочь хвостовому винту 10 справиться с поворотом фюзеляжа в сторону F2, киль 9 профилирован таким образом, чтобы создать боковую аэродинамическую силу P, как это показано на фиг.3.
Кроме того, у задней кромки киль 9 содержит закрылок киля 14, ориентируемый вокруг оси поворота X-X. Если с его нейтральной позиции 14N закрылок киля 14 отклоняется в направлении F2 чтобы занять положение 14.1, он увеличивает боковую аэродинамическую силу P. Если закрылок киля 14 отклоняется в направлении F1, чтобы занять положение 14.11, боковая аэродинамическая сила P уменьшается.
Согласно изобретению угол отклонения d закрылка киля 14 является функцией угла общего шага (DTORP) лопастей 7 несущего винта 6 и поступательной скорости V вертолета 1.
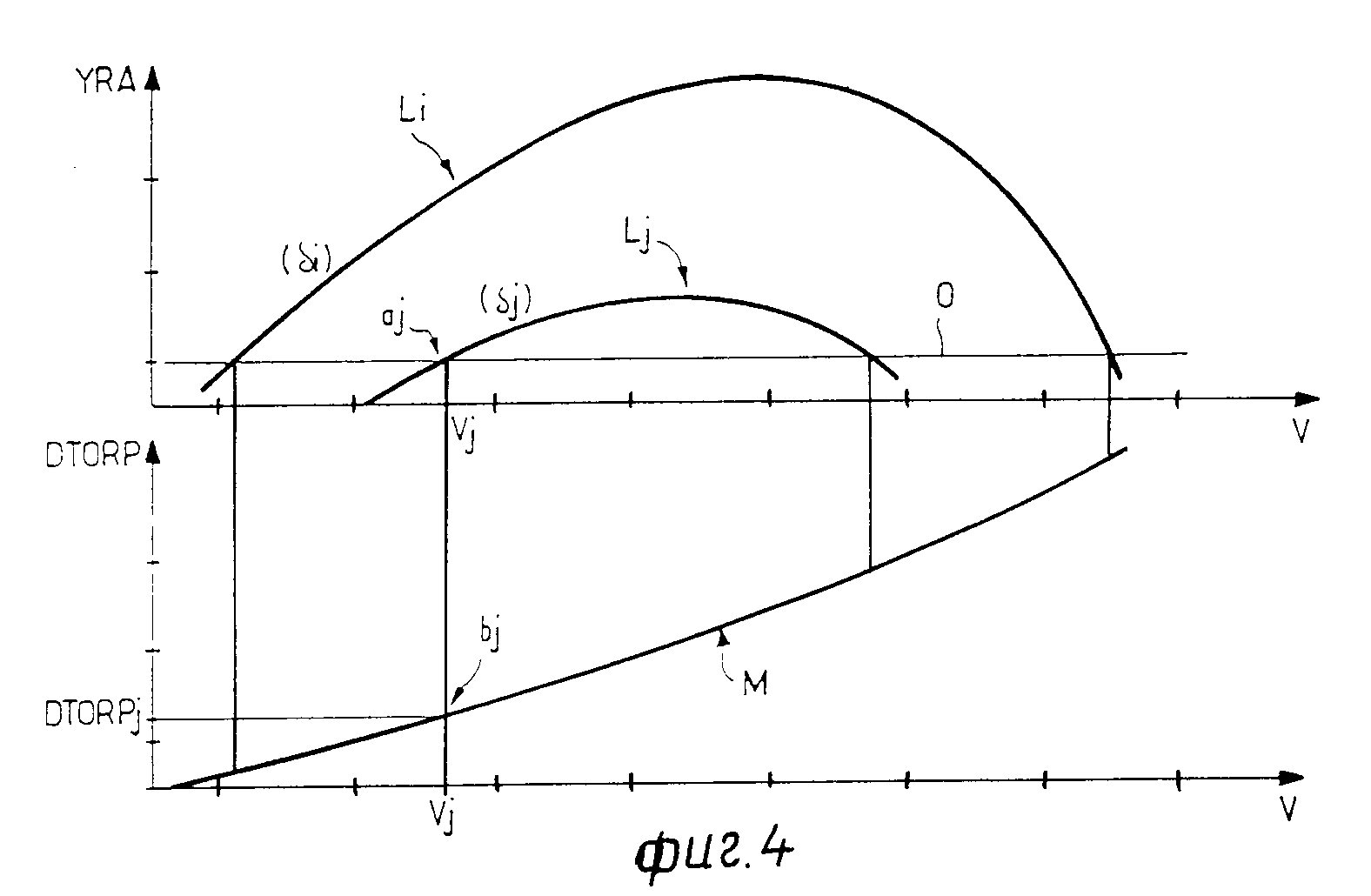
На фиг. 4 показаны одна ниже другой (согласованно) две системы осей абсцисс и ординат. Первая из этих систем несет в ординатах боковую тягу YRA хвостового винта 10 и в абсциссах -поступательную скорость V вертолета 1. Вторая система осей несет в ординатах угол общего шага DTORP несущего винта 6 и в абсциссах также поступательную скорость V вертолета 1.
Экспериментально моделированием
или расчетами вычерчивают
в первой системе осей для каждой из множества величин угла отклонения d закрылка киля кривую, дающую изменение YRA в зависимости от V. Таким образом, для величины
di получают отдельную кривую Li семейства кривых, в то время как для величины δj от δ получают другую отдельную кривую Li указанного семейства
кривых;
во второй системе осей кривую М, представляющую вариацию угла общего шага DTORP в зависимости от поступательной скорости V.
Разумеется, оптимальное использование закрылка киля 14 получают, если боковая тяга YRA, идущая от хвостового винта 10, равна нулю. Для отдельной кривой Lj это оптимальное использование соответствует точке aj пересечения указанной кривой Lj с прямой О, соответствующей YRA=0. Точка соответствует величине Vj для скорости V.
Кроме того, каждой величине Vj скорости V кривая М ставит в соответствие величину DTORPj угла шага DTORP.
Таким образом, по кривым Lj и М можно определять триплет или тройку величин DTORPj, Vj, dj или некоторое отклонения закрылка киля 14 является оптимальным.
Разумеется, поскольку используют множество кривых Lj, а не одну только кривую Lj, определяют множество таких триплетов или троек.
Следует отметить, что благодаря этому множеству триплетов и измерением DTORP и V можно определить оптимальную величину δ, соответствующую измерениям величинам DTORP и V.
Действительно, с помощью процесса, обратного описанному перед этим, измеренные величины DTORPj и Vj определяют точку Vj кривой М, которой соответствует точка aj, привой Lj и, следовательно, величина dj угла отклонения δ.
Устройство (фиг.5) позволяет управлять оптимальным отклонением закрылки киля 14 относительно оси Х-Х. Это устройство содержит датчик положения 15, соединенный с рукояткой 16 управления общего шага в распоряжении пилота вертолета, а также датчик 17 поступательной скорости V этого последнего. Угол общего шага DTORP, выдаваемый датчиком 15, и скорость V, выдаваемая датчиком 17, передаются на вычислительное устройство 18, которое, исходя из этих входных замеров, выдает необходимую величину d отклонения закрылка киля 14. Это значение d передается на силовой цилиндр 19, управляющий вращением указанного закрылка киля 14 вокруг оси Х-Х. Шаг лопастей 12 хвостового винта 10 может таким образом устанавливаться так, чтобы тяга YRA была нулевой.
Вычислительное устройство 18 может содержать таблицу, которая для каждой пары измеренных величин DTORPj и Vj содержит соответствующую оптимальную величину di, как это описано выше.
В этом случае основная функция вычислителя 18 заключатся в приеме пары измерительных величин DTORPi и Vi и в поиске в указанной таблице соответствующей величины δi и ее адресации на силовой цилиндр 19.
Однако можно по множеству триплетов DTORPi, Vi и δi определить теоретическую функцию двух переменных величин DTORP и V, представляющую угол отклонения δ в виде dН (DTORP, V).
В том случае для каждой пары измеренных величин DTORPi и Vi вычислитель 18 вычисляет соответствующую величину di из уравнения δiН (DTORPi, Vi).
Опыт и вычисление показали, что теоретическая функция Н
представляла преимущественно полиномиальную форму типа

в которой К1, К2,КР есть Р числовых коэффициентов, каждый из которых соединяется с одним из Р мономов функции Н;
n1, n2,np показатели степени, целые или пробные, соответственно соединенные с переменной DTORP указанных p мономов;
m1, m2, mp показатели степени, целые или пробные, соответственно соединенные с переменной v указанных p мономов.
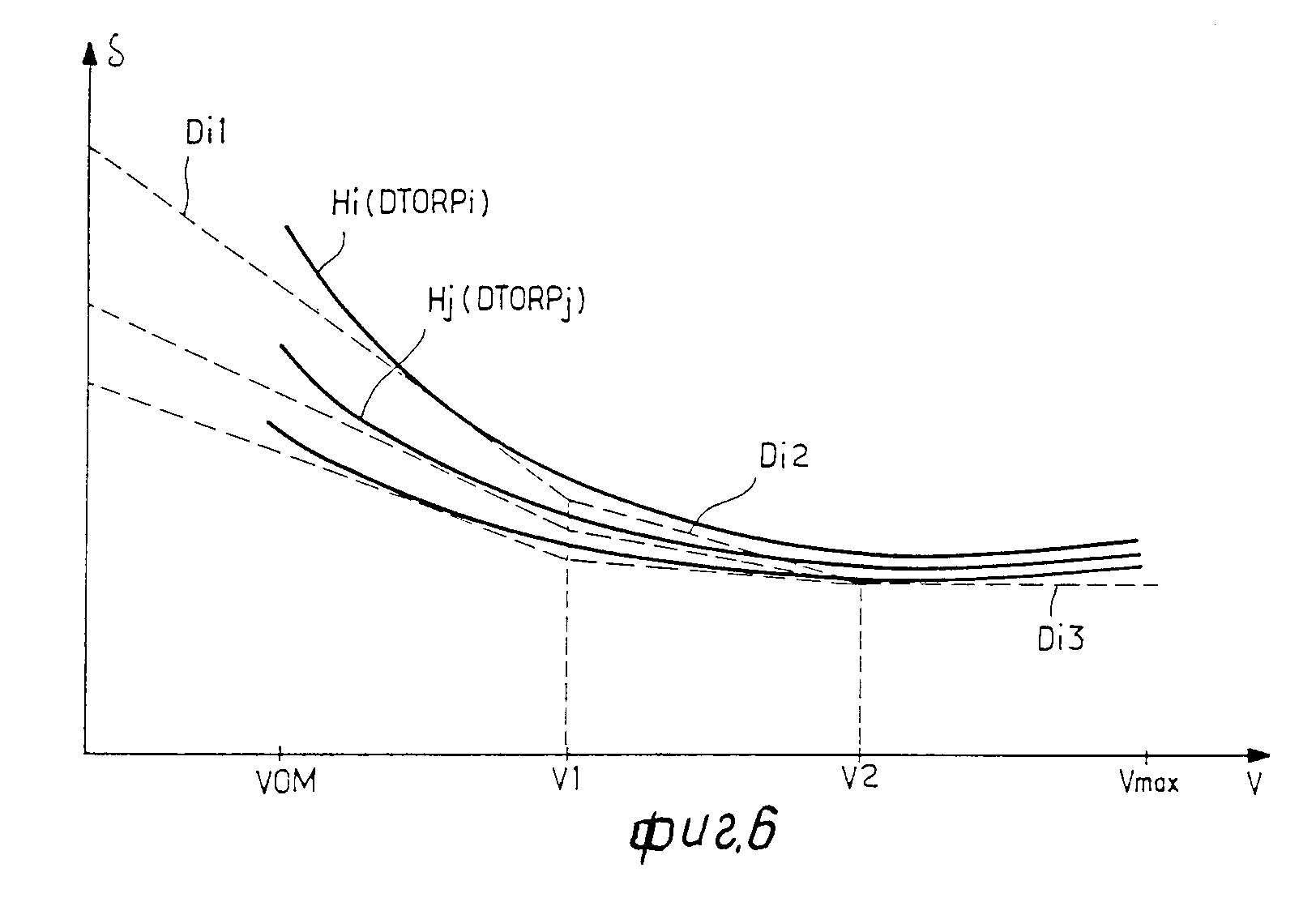
Функция H (DTORP, V) может быть изображена системой кривых Н фиг. 6.
На фиг. 6 каждая кривая Н представляет изменение отклонения в зависимости от поступательной скорости v, для определенной величины DTORP; общего шага DTORP.
Система кривых Hi представляет таким образом закон Н (DTORP,V) позволяющий аннулировать боковую тягу YRA хвостового винта 10.
Этот закон относительно сложен, но он может быть упрощен. Действительно, опыт показывает, что соответствует, в частности, в случае с задним винтом в обтекателе вокруг нулевой величины YRA зона, в которой суммарная мощность WTT, потребляемая хвостовым винтом 10 (это суммарная мощность WTT, включающая мощность, реально отбираемую хвостовым винтом 10 от двигателя 5 для создания боковой тяги YRA, и мощность, необходимую для преодоления лобового сопротивления хвостового винта 10 и также выдаваемую двигателем 5), практически постоянна, причем эта зона имеет тенденцию расширяться при большой скорости v. Из этого следует, что нельзя полностью аннулировать боковую тягу YRA хвостового винта 10, а надо просто приближаться как можно ближе к этой зоне. Если отклоняют закрылок киля 14 за угол отклонения, позволяющий достичь этой зоны, не только ничего не выиграют в мощности на привод хвостового винта 10, но еще и теряют из-за дополнительного сопротивления закрылка киля 14.
Следовательно, кривые H: могут быть аппроксимированы отрезками прямых (линейные функции) в интервалах скорости. На фиг. 6 показано, что каждая кривая Hi аппроксимирована прямолинейным отрезком Di11 между оптимальной скоростью подъема VOM и величиной V1 от V прямолинейным отрезком Di22 между величиной V1 и второй величиной V2 и прямолинейным отрезком Vi 3 и второй величиной V2 и прямолинейным от резком Vi 3 между величиной V2 и максимальной скоростью горизонтального полета V макс.
В этом упрощенном случае представленная функция в каждом из интервалов VOM V1,
V1-V2 и V2-Vmax линейная функция DTORP и V типа
δ = A•DTORP+B•V
А и В при этом являются постоянными коэффициента.
Амплитуда отклонения δ в положительном направлении (позиция 141) может быть порядка от 30 до 45o и в отрицательном направлении (позиция 1411) порядка от -10 до -15o. Внешние амплитуды отклонения ограничены упорами (не показаны). Цилиндр 19 может быть электрическим или гидравлическим.
Таким образом
в горизонтальном полете вертолета 1 со скоростями V между
скоростью минимальной мощности (VOM) и максимальной скоростью горизонтального полета (Vmax) закрылок 14 может обеспечить почти все усилия компенсации реактивного момента несущего винта, и
хвостовой винт 10 может работать практически на нулевой тяге YRA, откуда сведение к минимуму необходимой суммарной мощности в полете на всем этом диапазоне скорости. Таким образом можно показать, что
мощность, расходуемая на преодоление дополнительного сопротивления от закрылка 14, намного меньше той, которая была бы необходима для получения такой же балансировки, модулируя только тягу YRA заднего
винта;
в полете с набором высоты
на большой горизонтальной скорости V действие закрылка 14 (в позиции 14.1) может быть достаточно эффективным, чтобы продолжать обеспечивать почти
полную разгрузку хвостового винта 10 для всех возможных вертикальных скоростей с установленной тяговооруженностью;
для горизонтальных скоростей V, близких к оптимальной скорости набора высоты
VOM, закрылок 14 быстро достигает упора в позитивном направлении с тех пор, пока вертикальная скорость позитивна. Таким образом, разгрузка только частичная и все менее и менее значительна по
относительной величине по мере того, как увеличивается вертикальная скорость. Тем не менее воздействие закрылка 14 на необходимую суммарную мощность в наборе высоты остается выгодным, что дает
значительный прирост вертикальной скорости для данного уровня мощности и может выражаться выигрышем во взлетной массе, когда критическое условие есть темп набора высоты на одном двигателе;
при полете со снижением и в режиме авторотации автоматическое снижение подъемной силы киля под воздействием закрылка (в позиции 14.11) позволяет при необходимости создавать отрицательную тягу YRA
посредством хвостового винта 10. Это увеличивает диапазон имеющегося управления педалями и позволяет также в некоторой степени ограничить диапазон реверсивного шага винта. Тот факт, что нет
необходимости создавать отрицательную тягу задним винтом в режиме авторотации увеличивает аэродинамическое качество планирования вертолета в этом режиме полета.
Таким образом согласно
изобретению получают выигрыш в летных характеристиках, в частности в том, что касается
вертикальной скорости набора высоты при оптимальной поступательной скорости набора высоты VOM;
максимальной скорости горизонтального полета Vmax
взлетной массы.
Что касается измеренной поступательной скорости V, предпочтительно использовать приборную скорость (indicated air speed), поскольку эта приборная скорость обычно измеряется на борту вертолетов. Действительно, истинная воздушная скорость VTAS (trus air speed), которая является реальной скоростью вертолета по отношению к воздуху, обычно не измеряется. Однако известно, что скорость VTAS и приборная скорость связаны через плотность воздуха.
Закрылок киля 14 может быть любого известного типа. Он может быть простым закрылком (plan flap) или щелевым закрылком (slotted flap). Щелевой закрылок предпочтителен для случая получения больших разгрузок хвостового винта 10 в полете в наборе высоты при оптимальной скорости VOM.
Как показано на фиг.1 и 2, вертолет 1 может иметь боковые кили 20 и 21, дающие дополнительный аэродинамический эффект для разгрузки хвостового винта 10. Каждый из боковых килей 20 и 21 может быть снабжен со стороны его задней кромки закрылком киля, подобным закрылку 14, и управляем подобным образом. Как пример, указанные боковые кили 20 и 21 могут быть полностью отклоняемыми и управляемыми так, как указано выше.
В случае, когда боковые кили 20 и 21 предусмотрены, при необходимости можно не предусматривать центральный задний киль 9, описанный выше.
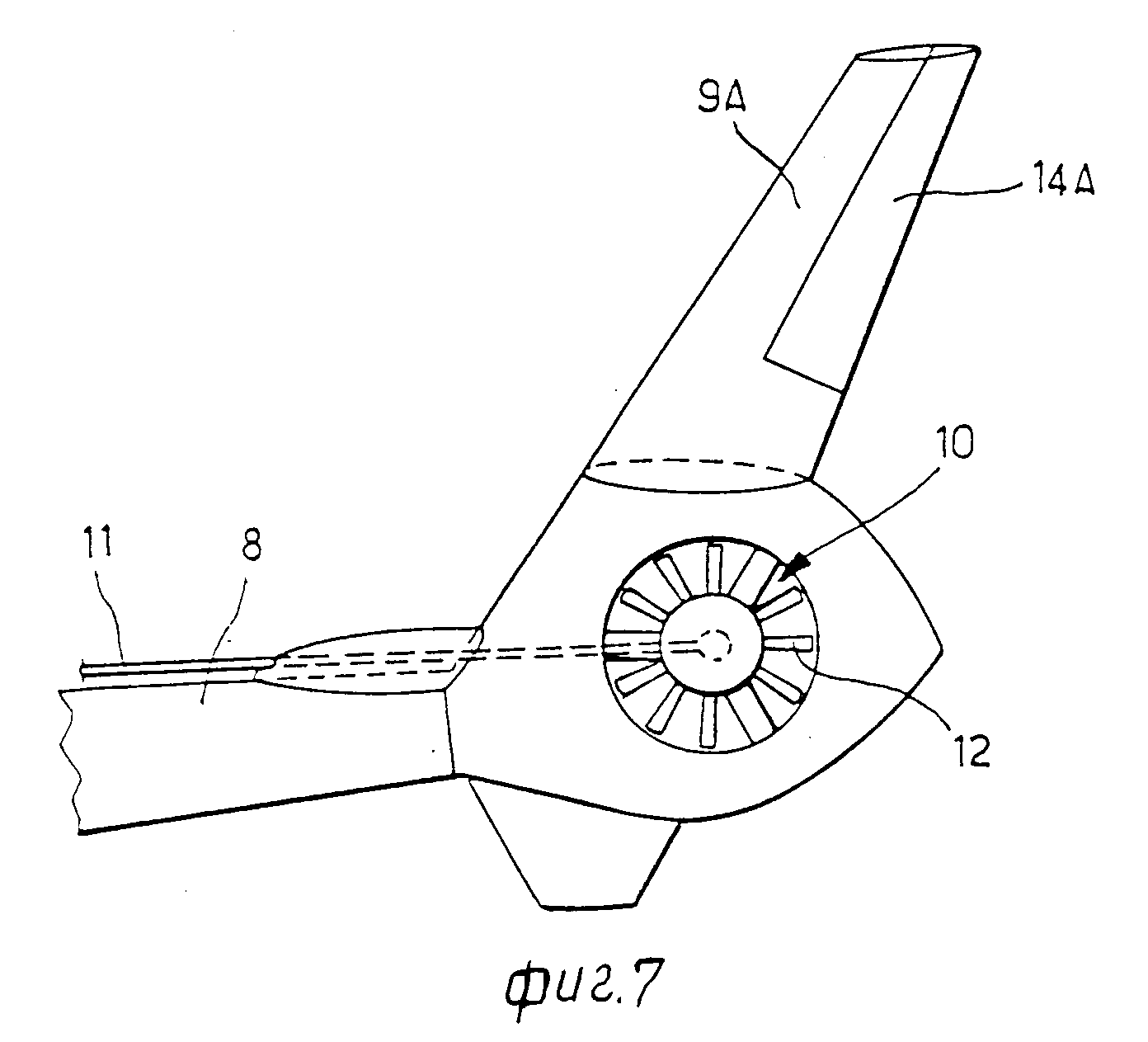
В примере выполнения согласно фиг.7 и 8 задний вертикальный киль 9 фиг.1 и 2 заменен двумя наклонными килями 9А и 9В. Как видно, каждый наклонный киль 9А и 9В снабжен со стороны своей задней кромки килевым закрылком 14А и 14В, отклоняемым таким же образом, как описано выше для закрылка 14. Как пример, каждый наклонный киль 9А и 9В может быть смонтирован полностью отклоняемым и управляемым согласно изобретению.
Следует отметить, что устройство согласно фиг. 5 очень просто, но оно не может принять в расчет неизмеряемые параметры или трудноизмеряемые, такие как масса вертолета 1, плотность воздуха или угол скольжения указанного вертолета. Между тем эти параметры имеют влияние на угол общего шага DTORP. Поэтому устройство по фиг. 6 может иметь действие, которое не всегда бывает оптимальным.
Для совершенствования устройства согласно фиг.5 устройство согласно фиг. 9 содержит вместо вычислителя 18 отклонения закрылка 14 вычислитель 22 пилотажа вертолета 1 по рысканию.
Вычислитель 22 кроме угла общего шага DTORP и поступательной скорости V получает
сигналы
путевого управления DDN от педалей в расположении пилота через датчик положения педалей (не показано);
угловую скорость рыскания r и в случае необходимости угловые скорости крена и тангажа;
коэффициент боковой перегрузки ny
плотность воздуха r, угол курса j, тангажа q и угол крена Ф.
Эти различные входные данные измеряются и вычисляются известным способом на борту вертолета.
Кроме того, помимо силового цилиндра 19 закрылка киля 14, вычислитель 22 пилотажа в рыскании управляет цилиндром 23, который сам управляет шагом 8 лопастей (и таким образом тягой YRA хвостового винта 10. Обратная связь 24 позволяет ввести шаг q лопастей 12 в вычислитель 22 аналогично данным DTORP, V, DDN, r, ny, r, j, q и Ф.
Таким образом, устройство согласно фиг.9 работает в замкнутом контуре и дает возможность устранять влияние неизмеряемых параметров, упомянутых выше.
Устройство согласно фиг. 9 позволяет оптимизировать распределение действия компенсации реакционного момента несущего винта между закрылком киля 14 и хвостовым винтом 10, приводя шаг q лопастей 12 к опорной величине и сохраняя боковую сбалансированность вертолета 1. Это устройство на основе измерения реального шага q хвостового винта 10 воздействует на закрылок 14 в соответствии с законом типа автоматического триммирования до тех пор, пока не будет получена путевая сбалансированность с шагом хвостового винта, обеспечивающим нулевую или незначительную тягу. Следует отметить, что с хвостовым винтом в кольцевом обтекателе этот шаг почти независим от скорости.
В зависимости от построения системы управления полетом (механическая, электрическая) и наличия или отсутствия автоматической системы пилотажа практическая конструкция устройств согласно фиг. 5 и 9 может принимать различные формы.
С другой стороны, выбирая приводные механизмы 19 и 23, можно получить устройства управления с динамическими характеристиками медленными и быстрыми. Устройства с быстрыми динамическими характеристиками могут позволить улучшить путевую устойчивость и маневренность вертолета 1.
Из сказанного следует, что закрылок 14 согласно фиг.5 и 9 может быть заменен килем 9, 20, 21 без килевого закрылка, который был бы целиком поворотным. Также, несмотря на то, что только один закрылок 14 был представлен на фиг. 5 и 9, само собой разумеется, что несколько закрылков 14 (или несколько полностью поворотных килей) могут управляться одновременно средствами управления 18 и 22.
Реферат
Сущность изобретения: предложен вертолет с одним несущим винтом, содержащий систему компенсации реактивного момента несущего винта, включающую хвостовой винт, приводимый во вращение тем же средством, что и несущий винт, систему управления хвостовым винтом и по меньшей мере одну управляемую аэродинамическую поверхность направления. При этом вертолет снабжен средствами для автоматического управления углом поворота аэродинамической поверхности направления в зависимости от угла общего шага несущего винта и скорости (V) поступательного горизонтального движения вертолета. Изобретение также относится к способам компенсации реактивного момента несущего винта одновинтового вертолета. 2 с.и. 17 з.п.ф-лы, 9 ил.
Комментарии