Токарный самоцентрирующий патрон - SU1604512A1
Код документа: SU1604512A1
Чертежи

Описание
в
Ллг
Изобретение относится к станкостроению , а более конкретно к устройствам, для закрепления заготовок на шпинделе токарного станка в условиях автомати- зированного производства.
Целью изобретения является повышение точности измерения усилия зажима в условиях автоматизированного производства .-
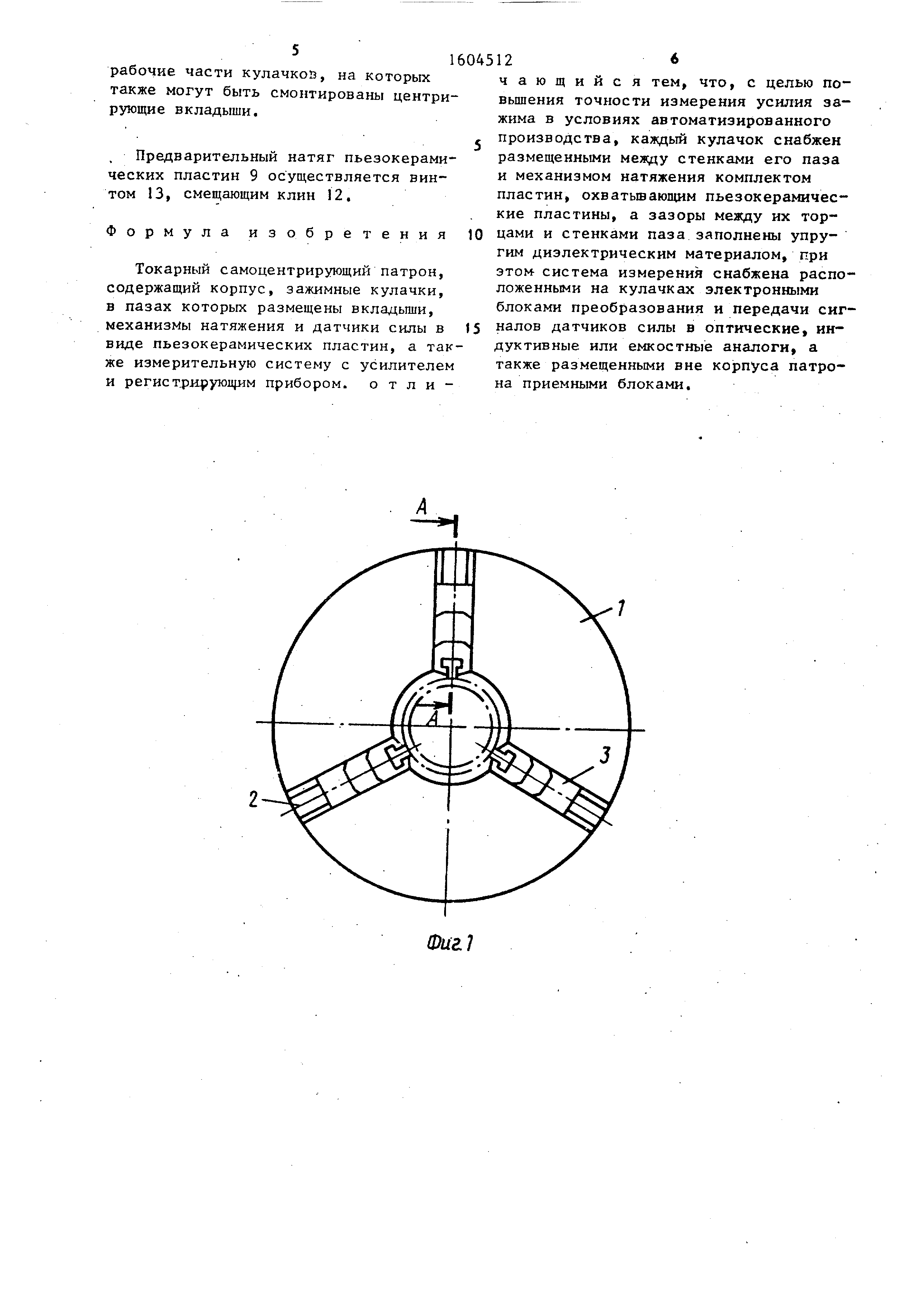
На фиг.1 показан патрон, общий вид; на фиг.2 - разрез А-А на фйг.1; на фиг.З - разрез Б-Б на фиг.2.
Токарный самоцентрирующий патрон содержит корпус 1, в котором выполне- ны радиальные направляющие пазы 2 с установленными в них с возможностью перемещения зажимными кулачками 3. В каждом кулачке прорезаны два паза 4 и 5 и выполнено отверстие 6. Паз 4 имеет качественно обработанную опорную поверхность 7, в нем закреплен зажимной центрирующий вкладыш 8, задняя поверхность которого выполнена клиновой. Он имеет возможность пере- мещения только в одном направлении, а именно к опорной поверхности паза 4 кулачка, на которой размещен датчик силы измерения усилия обраба- тьшаемой детали, состоящий из двух пьезокерамических пла стин 9, установленных между двумя комплектами пластин 10. и 11. Пластина 10 выполнена плоской с двумя буртиками по краям для обеспечения объемного обжатия пластин и улучшения технологичности конструкции кулачка, а пластина II выполнена плоской, торцами упирается в буртики пластины 10 и служит для сколжения по ее поверхности механизма предварительного натяга, обеспечивающего предварительное нагружение датчика силы и выпол ненного в виде клина 12 с резьбовым отверстием для винта 13. Клин 12 может перемещаться между плоской поверхностью пластины 11 и клиновой поверхностью вкладыша 8 осуществляя предварительньй натяг пьезокерамических пластин 9, Все пространство между торцами пьезокерамических пластин, буртиками пластины 10, стенкаьш паза кулачка заполненного диэлектрическим материалом 14 (эпоксидная смола), что создает объемное обжатие пьезокерамики.
В пазу 5 кулачка 3 закреплен элекронный блок 15 преобразования и передачи измеряемого сигнала, который пробразует измеренный сигнал в емкостн
,
0
0
5
в высокочастотный индуктивный сигнал или инфракрасный оптический сигнал, излучаемый на приемный блок 16, который преобразует этот сигнал, усиливает , и регистрирует регистрирующим прибором 17.
Патрон содержит приводной Механизм для управления зажимными кулачками лю- брй известной конструкции, как ручной, так и механизированный, и предназначен для закрепления преимущественно полых тонкостенных заготовок 18.
Предлагаемый патрон работает следующим образом.
Перед установкой детали датчик силы обнуляют. Затем заготовку 18, требующую нормированной величины зажимного усилия, устанавливают ориентировочно на оси патрона в пространстве между кулачками 3 и приводят их в движение в радиальных направляющих пазах 2 включением известного приводного механизма. Смещаясь в направлении на заготовку 18, кулачки взаимодействуют с ней вкладышами 8, которые обеспечивают точное центрирование и закрепление детали .
В первоначальный момент контактирования вкладьш1ей 8 с закрепляемой деталью на обкладках пьезокерамических пластин 9 датчика силы возникает электрический заряд, величина которого пропорциональна механическому нагру- жениюо Этот заряд преобразовьшается электронным блоком 15 преобразования и передачи в емкостной, в высокочас- тотньп индуктивный или инфракрасный оптический сигнал, которьй излучается на приемный блок 16 и поступает на регистрирующий прибор 17, и при достижении заданного уровня усилия зажима прекращают процесс закрепления обра- батьшаемой детали. При этом заготовка оказьшаётся закрепленной в патроне с заданным усилием, величина которого нормирована исходя из условий последующей .обработки и характеристик самой заготовки (ее формы, прочности, материала, соотношения размеров и т.п.), что предотвращает деформирование заготовки При зажиме в патроне, а следовательно, обусловливает точность обработки на станках. Наличие бесконтактной измерительной цепи позволяет следить за изменением усилия зажима В процессе резания
В случае обработки деталей типа колец , гильз и т.д. используют внешние
рабочие части кулачков, на которых также могут быть смонтированы центрирующие вкладыши.
Предварительный натяг пьезокерами- ческих пластин 9 осуществляется винтом 13, смещающим клин 12.
Формула изобретения
Токарный самоцентрирующий патрон, содержащий корпус, зажимные кулачки, в пазах которых размещены вкладьши, механизмы натяжения и датчики силы в виде пьезокерамических пластин, а также измерительную систему с усилителем и регистрирую14им прибором, о т л и 1
604512
чающийся тем, что, с целью по- вьшения точности измерения усилия зажима в условиях автоматизированного J производства, каждый кулачок снабжен размещенными между стенками его паза и механизмом натяжения комплектом пластин, охватьюающим пьезокерамичес- кие пластины, а зазоры между их тор10 цами и стенками паза заполнены упругим дизлектрическим материалом, при зтон система измерения снабжена расположенными на кулачках электронными блоками преобразования и передачи сиг15 налов датчиков силы в оптические, индуктивные или емкостные аналоги, а также размещенными вне корпуса патрона приемными блоками.

Реферат
Изобретение относится к станкостроению, а более конкретно - к устройствам для закрепления заготовок на шпинделе токарного станка в условиях автоматизированного производства. Целью изобретения является повышение точности измерения усилия зажима в условиях автоматизированного производства. В пазу 4 кулачка 3 установлены вкладыш 8, клин 12 комплект пластин 10 и 11, охватывающий пьезокерамические пластины 9, представляющие собой датчик силы. Зазоры между стенками паза 4 и пластинами 9 заполнены упругим диэлектриком 14. Блок 15 преобразования сигналов от пластин 9 в оптические, индуктивные или емкостные аналоги, закреплен в пазу 5 кулачка 3. Приемный блок 16 установлен вне корпуса патрона и связан с регистрирующим прибором 17. При зажиме заготовки 18 усилие передается на пластины 9 через детали 8, 12, 11. Наличие диэлектрика 14 позволяет осуществить объемное обжатие пластин 9, что повышает точность измерения. Сигналы от пластин 9 преобразуются в оптический индуктивный или емкостный аналог в блоке 15 и без контакта передаются на приемный блок 16, что позволяет вести измерение на ходу. Величину усилия зажима регистрируется прибором 17, что позволяет обеспечить заданное усилие зажима. 3 ил.

Формула
Комментарии