Отслеживание блокировки сети движения при оперативном управлении автономным транспортным средством - RU2734732C1
Код документа: RU2734732C1
Чертежи








Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к оперативному управлению автономным транспортным средством и автономному вождению.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Транспортное средство, например, автономное транспортное средство может перемещаться по участку сети движения транспортных средств. Перемещение по участку сети движения транспортных средств может включать в себя генерацию или сбор, например, с помощью датчика транспортного средства, данных, например, данных, представляющих оперативную среду транспортного средства или ее часть. Соответственно, могут быть предпочтительны система, способ и оборудование оперативного управления автономным транспортным средством, включающего в себя отслеживание блокировки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В настоящем документе раскрыты аспекты, признаки, элементы, реализации и варианты выполнения оперативного управления автономным транспортным средством, включающего в себя отслеживание блокировки.
[0004] Аспект раскрытых вариантов выполнения представляет собой способ для использования при перемещении по сети движения транспортных средств, который может включать в себя этап, на котором осуществляют перемещение посредством автономного транспортного средства по сети движения транспортных средств, причем перемещение по сети движения транспортных средств включает в себя этап, на котором осуществляют работу экземпляра устройства отслеживания блокировки. Работа экземпляра устройства отслеживания блокировки может включать в себя этапы, на которых определяют информацию об оперативной среде, включающую в себя информацию, соответствующую первому внешнему объекту в пределах заданного расстояния от автономного транспортного средства, определяют первую область сети движения транспортных средств на основе текущего геопространственного местоположения автономного транспортного средства в сети движения транспортных средств и определенного маршрута автономного транспортного средства и определяют вероятность доступности первой области на основе информации об оперативной среде. Перемещение по сети движения транспортных средств может включать в себя этап, на котором осуществляют перемещение по участку сети движения транспортных средств на основе вероятности доступности.
[0005] Другой аспект раскрытых вариантов выполнения представляет собой способ для использования при перемещении по сети движения транспортных средств, который может включать в себя этап, на котором осуществляют перемещение посредством автономного транспортного средства по сети движения транспортных средств, причем перемещение по сети движения транспортных средств включает в себя этапы, на которых определяют информацию об оперативной среде, включающую в себя информацию, соответствующую внешнему объекту в пределах заданного расстояния от автономного транспортного средства, определяют область сети движения транспортных средств на основе текущего геопространственного местоположения автономного транспортного средства в сети движения транспортных средств и определенного маршрута автономного транспортного средства и определяют посредством экземпляра устройства отслеживания блокировки вероятность блокировки области сети движения транспортных средств на основе информации об оперативной среде, причем вероятность блокировки представляет собой вероятность того, что ожидаемый путь внешнего объекта и первый ожидаемый путь автономного транспортного средства в геопространственном и временном отношении сойдутся в пределах области. Перемещение по сети движения транспортных средств может включать в себя этап, на котором при условии, что вероятность блокировки находится в пределах заданного порогового значения, осуществляют перемещение по участку сети движения транспортных средств в соответствии с первым ожидаемым путем автономного транспортного средства. Перемещение по сети движения транспортных средств может включать в себя этапы, на которых при условии, что вероятность блокировки равна по меньшей мере заданному пороговому значению, генерируют обновленный маршрут автономного транспортного средства таким образом, чтобы вероятность того, что ожидаемый путь внешнего объекта и второй ожидаемый путь автономного транспортного средства в геопространственном и временном отношении сходятся в пределах области, находилась в пределах заданного порогового значения, причем второй ожидаемый путь основан на обновленном маршруте, и осуществляют перемещение по участку сети движения транспортных средств в соответствии со вторым ожидаемым путем автономного транспортного средства.
[0006] Другой аспект раскрытых вариантов выполнения представляет собой автономное транспортное средство для оперативного управления автономным транспортным средством, включающего в себя отслеживание блокировки. Автономное транспортное средство может включать в себя процессор, выполненный с возможностью выполнения инструкций, хранящихся на некратковременном компьютерно-читаемом носителе, для осуществления работы экземпляра устройства отслеживания блокировки для определения информации об оперативной среде, включающей в себя информацию, соответствующую внешнему объекту в пределах заданного расстояния от автономного транспортного средства, определения участка сети движения транспортных средств на основе текущего геопространственного местоположения автономного транспортного средства в сети движения транспортных средств и определенного маршрута автономного транспортного средства, определения вероятности доступности участка сети движения транспортных средств на основе информации об оперативной среде и управления автономным транспортным средством для перемещения по участку сети движения транспортных средств на основе вероятности доступности.
[0007] Вариации этих и других аспектов, признаков, элементов, реализаций и вариантов выполнения способов, оборудования, процедур и алгоритмов, раскрытых в настоящем документе, описаны более подробно ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Различные аспекты способов и оборудования, раскрытых в настоящем документе, станут более очевидными со ссылкой на примеры, обеспеченные в следующем далее описании, и чертежи, на которых:
[0009] Фиг. 1 представляет собой схематическое изображение примера транспортного средства, в котором могут быть реализованы аспекты, признаки и элементы, раскрытые в настоящем документе;
[0010] Фиг. 2 представляет собой схематическое изображение примера участка системы движения и связи транспортных средств, в которой могут быть реализованы аспекты, признаки и элементы, раскрытые в настоящем документе;
[0011] Фиг. 3 представляет собой схематическое изображение участка сети движения транспортных средств в соответствии с настоящим изобретением;
[0012] Фиг. 4 представляет собой схематическое изображение примера системы оперативного управления автономным транспортным средством в соответствии с вариантами выполнения настоящего изобретения;
[0013] Фиг. 5 представляет собой блок-схему примера оперативного управления автономным транспортным средством в соответствии с вариантами выполнения настоящего изобретения;
[0014] Фиг. 6 представляет собой схематическое изображение примера сцены блокировки в соответствии с вариантами выполнения настоящего изобретения;
[0015] Фиг. 7 представляет собой схематическое изображение примера сцены с пешеходами, которая включает в себя сценарии, включающие в себя пешеходов, в соответствии с вариантами выполнения настоящего изобретения;
[0016] Фиг. 8 представляет собой схематическое изображение примера сцены с перекрестком, которая включает в себя сценарии, включающие в себя перекрестки, в соответствии с вариантами выполнения настоящего изобретения; и
[0017] Фиг. 9 представляет собой схематическое изображение примера сцены смены полосы, которая включает в себя сценарий, включающий в себя смену полос, в соответствии с вариантами выполнения настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0018] Транспортное средство, например, автономное транспортное средство или полуавтономное транспортное средство, может перемещаться по участку сети движения транспортных средств. Транспортное средство может включать в себя один или более датчиков, и перемещение по сети движения транспортных средств может включать в себя генерацию или сбор данных датчиками, например, данных, соответствующих оперативной среде транспортного средства или ее части. Например, данные датчика могут включать в себя информацию, соответствующую одному или более внешним объектам, например, пешеходам, удаленным транспортным средствам, другим объектам в пределах оперативной среды транспортного средства, геометрии сети движения транспортных средств или их сочетанию.
[0019] Автономное транспортное средство может включать в себя систему оперативного управления автономным транспортным средством, которая может включать в себя одно или более устройств отслеживания оперативной среды, которые могут обрабатывать информацию об оперативной среде автономного транспортного средства, например, данные датчика. Устройства отслеживания оперативной среды могут включать в себя устройство отслеживания блокировки, которое может определять информацию о вероятностях доступности участков сети движения транспортных средств, находящихся вблизи автономного транспортного средства в пространственно-временном отношении.
[0020] Система оперативного управления автономным транспортным средством может включать в себя контроллер оперативного управления автономным транспортным средством или исполнитель, который может обнаруживать один или более оперативных сценариев, например, сценарии, включающие в себя пешеходов, сценарии, включающие в себя перекрестки, сценарии, включающие в себя смену полос, или любой другой оперативный сценарий транспортного средства или сочетание оперативных сценариев транспортного средства, соответствующих внешним объектам.
[0021] Система оперативного управления автономным транспортным средством может включать в себя один или более модулей оценки оперативного управления для конкретных сценариев. Каждый модуль оценки оперативного управления для конкретного сценария может представлять собой модель, например, модель частично наблюдаемого марковского процесса принятия решений (POMDP), соответствующего оперативного сценария. Контроллер оперативного управления автономным транспортным средством может создавать соответствующие экземпляры модулей оценки оперативного управления для конкретных сценариев в ответ на обнаружение соответствующих оперативных сценариев.
[0022] Контроллер оперативного управления автономным транспортным средством может принимать возможные действия по управлению транспортным средством от соответствующих созданных экземпляров модулей оценки оперативного управления для конкретных сценариев, может определять действие по управлению транспортным средством из возможных действий по управлению транспортным средством и может управлять автономным транспортным средством для перемещения по участку сети движения транспортных средств в соответствии с определенным действием по управлению транспортным средством.
[0023] Хотя в настоящем документе описание приведено со ссылкой на автономное транспортное средство, способы и оборудование, описанные в настоящем документе, могут быть реализованы в любом транспортном средстве, выполненном с возможностью автономной или полуавтономной работы. Хотя описание приведено со ссылкой на сеть движения транспортных средств, способ и оборудование, описанные в настоящем документе, могут включать в себя автономное транспортное средство, работающее в любой области, подходящей для движения транспортного средства.
[0024] При использовании в настоящем документе выражение «компьютер» или «вычислительное устройство» включает в себя любой блок или сочетание блоков, выполненных с возможностью выполнения любого способа или любой его части или частей, раскрытых в настоящем документе.
[0025] При использовании в настоящем документе выражение «процессор» означает один или более процессоров, например, один или более процессоров специального назначения, один или более цифровых сигнальных процессоров, один или более микропроцессоров, один или более контроллеров, один или более микроконтроллеров, один или более процессоров приложений, одну или более специализированных интегральных схем, один или более специализированных стандартных продуктов; одну или более программируемых пользователем вентильных матриц, интегральные схемы любого другого типа или их сочетание, одну или более машин состояний или любое их сочетание.
[0026] При использовании в настоящем документе выражение «память» означает любой используемый компьютером или считываемый компьютером носитель или устройство, которое может физически содержать, хранить, сообщать или передавать любой сигнал или информацию, которая может быть использована любым процессором или в сочетании с любым процессором. Например, память может представлять собой одно или более постоянных запоминающих устройств (ROM), одно или более оперативных запоминающих устройств (RAM), один или более регистров, одно или более запоминающих устройств по стандарту LPDDR, одну или более разновидностей кэш-памяти, одно или более полупроводниковых запоминающих устройств, один или более магнитных носителей, один или более оптических носителей, один или более магнитооптических носителей или любое их сочетание.
[0027] При использовании в настоящем документе выражение «инструкции» может включать в себя указания или выражения для выполнения любого способа или любой его части или частей, раскрытых в настоящем документе, и инструкции могут быть реализованы в аппаратном обеспечении, программном обеспечении или любом их сочетании. Например, инструкции могут быть реализованы в виде информации, например, компьютерной программы, хранящейся в памяти, которая может выполняться процессором для выполнения любого из соответствующих способов, алгоритмов, аспектов или их сочетаний, описанных в настоящем документе. В некоторых вариантах выполнения инструкции или их часть могут быть реализованы в виде процессора или схемы специального назначения, которая может включать в себя специализированное аппаратное обеспечение для выполнения любого из способов, алгоритмов, аспектов или их сочетаний, описанных в настоящем документе. В некоторых реализациях части инструкций могут быть распределены на множество процессоров на одном устройстве или на множестве устройств, которые могут обмениваться данными непосредственно или по сети, например, локальной сети, глобальной сети, сети Интернет или их сочетанию.
[0028] При использовании в настоящем документе выражение «пример», «вариант выполнения», «реализация», «аспект», «признак» или «элемент» служит в качестве примера, варианта или иллюстрации. Если не указано иное, любой пример, вариант выполнения, реализация, аспект, признак или элемент не зависит от другого примера, варианта выполнения, реализации, аспекта, признака или элемента и может использоваться в сочетании с любым другим примером, вариантом выполнения, реализацией, аспектом, признаком или элементом.
[0029] При использовании в настоящем документе выражения «определять» и «идентифицировать» или любые их вариации включают в себя выбор, выявление, вычисление, поиск, прием, определение, установление, получение или иную идентификацию или определение любым образом с использованием одного или более устройств, показанных и описанных в настоящем документе.
[0030] При использовании в настоящем документе выражение «или» предназначено для обозначения включающего «или», а не исключающего «или». То есть, если не указано иное, или если иное не очевидно из контекста, выражение «X включает в себя A или B» означает любую из естественных включающих перестановок. То есть, если X включает в себя A; X включает в себя B; или X включает в себя как A, так и B, то выражение «X включает в себя A или B» удовлетворяется в любом из вышеуказанных примеров. В дополнение, обозначение единственного числа, используемое в настоящей заявке и приложенной формуле изобретения, в общем следует толковать как означающее «один или более», если не указано иное, или если из контекста не очевидно, что предписывается форма единственного числа.
[0031] Дополнительно, для упрощения объяснения, хотя фигуры и описания в настоящем документе могут включать в себя последовательности этапов или стадий, этапы способов, раскрытых в настоящем документе, могут происходить в различном порядке или одновременно. Дополнительно, этапы способов, раскрытых в настоящем документе, могут происходить с другими этапами, явно не представленными и не описанными в настоящем документе. Кроме того, не все этапы способов, описанных в настоящем документе, могут быть необходимы для реализации способа в соответствии с настоящим изобретением. Хотя аспекты, признаки и элементы описаны в настоящем документе в конкретных сочетаниях, каждый аспект, признак или элемент может использоваться независимо или в различных сочетаниях с другими аспектами, признаками и элементами или без них.
[0032] Фиг. 1 представляет собой схематическое изображение примера транспортного средства, в котором могут быть реализованы аспекты, признаки и элементы, раскрытые в настоящем документе. В некоторых вариантах выполнения транспортное средство 1000 может включать в себя шасси 1100, силовую передачу 1200, контроллер 1300, колеса 1400 или любой другой элемент или сочетание элементов транспортного средства. Хотя для простоты показано транспортное средство 1000, включающее в себя четыре колеса 1400, может быть использовано любое другое движительное устройство или устройства, например, пропеллер или гусеница. На Фиг. 1 линии, соединяющие элементы, например, силовую передачу 1200, контроллер 1300 и колеса 1400, показывают, что информация, например, данные или управляющие сигналы, энергия, например, электроэнергия или крутящий момент, или как информация, так и энергия, могут передаваться между соответствующими элементами. Например, контроллер 1300 может принимать энергию от силовой передачи 1200 и может осуществлять связь с силовой передачей 1200, колесами 1400 или и тем и тем для управления транспортным средством 1000, что может включать в себя ускорение, замедление, рулевое управление или иное управление транспортным средством 1000.
[0033] Силовая передача 1200 может включать в себя источник 1210 энергии, трансмиссию 1220, блок 1230 рулевого управления, исполнительный механизм 1240 или любой другой элемент или сочетание элементов силовой передачи, например, подвеску, приводной вал, оси или выхлопную систему. Хотя показано отдельно, колеса 1400 могут быть включены в силовую передачу 1200.
[0034] Источник 1210 энергии может включать в себя двигатель, аккумулятор или их сочетание. Источник 1210 энергии может представлять собой любое устройство или сочетание устройств, выполненных с возможностью обеспечения энергии, например, электрической энергии, тепловой энергии или кинетической энергии. Например, источник 1210 энергии может включать в себя двигатель, например, двигатель внутреннего сгорания, электродвигатель или сочетание двигателя внутреннего сгорания и электродвигателя и может быть выполнен с возможностью обеспечения кинетической энергии в качестве движущей силы для одного или более колес 1400. В некоторых вариантах выполнения источник 1210 энергии может включать в себя блок потенциальной энергии, например, один или более аккумуляторов из сухих элементов, например, никель-кадмиевых (NiCd), никель-цинковых (NiZn), никель-металлогидридных (NiMH), литий-ионных (Li-ion) элементов; фотоэлементов; топливных элементов; или любое другое устройство, выполненное с возможностью обеспечения энергии.
[0035] Трансмиссия 1220 может принимать энергию, например, кинетическую энергию, от источника 1210 энергии и может передавать энергию на колеса 1400 для обеспечения движущей силы. Трансмиссия 1220 может находиться под управлением контроллера 1300, исполнительного механизма 1240 или того и другого. Блок 1230 рулевого управления может находиться под управлением контроллера 1300, исполнительного механизма 1240 или того и другого и может управлять колесами 1400 для рулевого управления транспортным средством. Исполнительный механизм 1240 может принимать сигналы от контроллера 1300 и может приводить в действие или управлять источником 1210 энергии, трансмиссией 1220, блоком 1230 рулевого управления или любым их сочетанием для управления транспортным средством 1000.
[0036] В некоторых вариантах выполнения контроллер 1300 может включать в себя блок 1310 определения местоположения, блок 1320 электронной связи, процессор 1330, память 1340, пользовательский интерфейс 1350, датчик 1360, интерфейс 1370 электронной связи или любое их сочетание. Хотя на фигуре показан единый блок, любой один или более элементов контроллера 1300 могут быть интегрированы в любое количество отдельных физических блоков. Например, пользовательский интерфейс 1350 и процессор 1330 могут быть интегрированы в первый физический блок, а память 1340 может быть интегрирована во второй физический блок. Хотя не показано на Фиг. 1, контроллер 1300 может включать в себя источник энергии, например, аккумулятор. Хотя они показаны в виде отдельных элементов, блок 1310 определения местоположения, блок 1320 электронной связи, процессор 1330, память 1340, пользовательский интерфейс 1350, датчик 1360, интерфейс 1370 электронной связи или любое их сочетание могут быть интегрированы в один или более электронных блоков, схем или микросхем.
[0037] В некоторых вариантах выполнения процессор 1330 может включать в себя любое устройство или сочетание устройств, выполненных с возможностью управления или обработки сигнала или другой информации, которые известны в настоящее время или будут разработаны позже, в том числе оптические процессоры, квантовые процессоры, молекулярные процессоры или их сочетание. Например, процессор 1330 может включать в себя один или более процессоров специального назначения, один или более цифровых сигнальных процессоров, один или более микропроцессоров, один или более контроллеров, один или более микроконтроллеров, одну или более интегральных схем, одну или более специализированных интегральных схем, одну или более программируемых пользователем вентильных матриц, один или более программируемых логических массивов, один или более программируемых логических контроллеров, одну или более машин состояний или любое их сочетание. Процессор 1330 может быть функционально связан с блоком 1310 определения местоположения, памятью 1340, интерфейсом 1370 электронной связи, блоком 1320 электронной связи, пользовательским интерфейсом 1350, датчиком 1360, силовой передачей 1200 или любым их сочетанием. Например, процессор может быть функционально связан с памятью 1340 по шине 1380 связи.
[0038] Память 1340 может включать в себя любой физический, некратковременный, используемый компьютером или считываемый компьютером носитель, выполненный с возможностью, например, размещения, хранения, обмена или передачи компьютерно-читаемых инструкций или любой информации, связанной с ними, для использования или процессором 1330 или в сочетании с процессором. Память 1340 может представлять собой, например, один или более твердотельных накопителей, одну или более карт памяти, один или более съемных носителей, одно или более постоянных запоминающих устройств, одно или более оперативных запоминающих устройств, один или более дисков, включая жесткий диск, флоппи-диск, оптический диск, магнитную или оптическую карту, или любой другой тип некратковременного носителя, подходящего для хранения электронной информации, или любое их сочетание.
[0039] Интерфейс 1370 связи может представлять собой беспроводную антенну, как показано, порт проводной связи, порт оптической связи или любой другой проводной или беспроводной блок, выполненный с возможностью взаимодействия со средой 1500 проводной или беспроводной электронной связи. Хотя на Фиг. 1 показан интерфейс 1370 связи, осуществляющий связь по одному каналу связи, интерфейс связи может быть выполнен с возможностью связи по множеству каналов связи. Хотя на Фиг. 1 показан один интерфейс 1370 связи, транспортное средство может включать в себя любое количество интерфейсов связи.
[0040] Блок 1320 связи может быть выполнен с возможностью передачи или приема сигналов через среду 1500 проводной или беспроводной электронной связи, например, через интерфейс 1370 связи. Хотя это явно не показано на Фиг. 1, блок 1320 связи может быть выполнен с возможностью передачи, приема или передачи и приема через любую среду проводной или беспроводной связи, например, радиочастоту (RF), ультрафиолетовый свет (UV), видимый свет, оптоволокно, проводную линию или их сочетание. Хотя на Фиг. 1 показан один блок 1320 связи и один интерфейс 1370 связи, может быть использовано любое количество блоков связи и любое количество интерфейсов связи. В некоторых вариантах выполнения блок 1320 связи может включать в себя блок специализированной связи на коротких расстояниях (DSRC), бортовой блок (OBU) или их сочетание.
[0041] Блок 1310 определения местоположения может определять информацию о географическом положении, например, долготу, широту, высоту над уровнем моря, направление движения или скорость, транспортного средства 1000. Например, блок определения местоположения может включать в себя блок системы глобального позиционирования (GPS), например, блок Национальной ассоциации морской электроники (NMEA) с поддержкой широкозонной усиливающей системы (WAAS), блок радиотриангуляции или их сочетание. Блок 1310 определения местоположения может использоваться для получения информации, которая представляет, например, текущий курс транспортного средства 1000, текущее положение транспортного средства 1000 в двух или трех измерениях, текущую угловую ориентацию транспортного средства 1000 или их сочетание.
[0042] Пользовательский интерфейс 1350 может включать в себя любой блок, выполненный с возможностью взаимодействия с человеком, например, виртуальную или физическую клавиатуру, сенсорную панель, дисплей, сенсорный дисплей, проекционный дисплей, виртуальный дисплей, дисплей дополненной реальности, тактильный дисплей, отслеживающее устройство, например, устройство отслеживания взгляда, динамик, микрофон, видеокамеру, датчик, принтер или любое их сочетание. Пользовательский интерфейс 1350 может быть функционально связан с процессором 1330, как показано, или с любым другим элементом контроллера 1300. Хотя на фигуре показан единый блок, пользовательский интерфейс 1350 может включать в себя один или более физических блоков. Например, пользовательский интерфейс 1350 может включать в себя звуковой интерфейс для осуществления звуковой связи с человеком и сенсорный дисплей для осуществления визуальной и тактильной связи с человеком. В некоторых вариантах выполнения пользовательский интерфейс 1350 может включать в себя множество дисплеев, например, множество физически отделенных блоков, множество определенных частей в одном физическом блоке или их сочетание.
[0043] Датчик 1360 может включать в себя один или более датчиков, например, массив датчиков, которые могут быть выполнены с возможностью обеспечения информации, которая может использоваться для управления транспортным средством. Датчики 1360 могут обеспечивать информацию о текущих оперативных характеристиках транспортного средства. Датчики 1360 могут включать в себя, например, датчик скорости, датчики ускорения, датчик угла поворота колес, датчики сцепления, датчики торможения, датчики положения рулевого колеса, датчики отслеживания взгляда, датчики положения сидений или любой другой датчик или сочетание датчиков, которые выполнены с возможностью передачи информации о некотором аспекте текущего динамического состояния транспортного средства 1000.
[0044] В некоторых вариантах выполнения датчики 1360 могут включать в себя датчики, выполненные с возможностью получения информации о физической среде, окружающей транспортное средство 1000. Например, один или более датчиков могут обнаруживать геометрию дороги и препятствия, например, неподвижные препятствия, транспортные средства и пешеходов. В некоторых вариантах выполнения датчики 1360 могут представлять собой или могут включать в себя одну или более видеокамер, лазерные системы обнаружения, инфракрасные системы обнаружения, акустические системы или бортовое устройство сканирования окружающей среды любого другого подходящего типа или сочетание устройств, которые известны в настоящее время или будут разработаны в будущем. В некоторых вариантах выполнения датчики 1360 и блок 1310 определения местоположения могут быть объединены.
[0045] Хотя отдельно не показано, в некоторых вариантах выполнения транспортное средство 1000 может включать в себя контроллер траектории. Например, контроллер 1300 может включать в себя контроллер траектории. Контроллер траектории может быть выполнен с возможностью получения информации, описывающей текущей состояние транспортного средства 1000 и маршрут, запланированный для транспортного средства 1000, и на основе этой информации определения и оптимизации траектории транспортного средства 1000. В некоторых вариантах выполнения контроллер траектории может выводить сигналы, выполненные с возможностью управления транспортным средством 1000, чтобы транспортное средство 1000 следовало по траектории, определенной контроллером траектории. Например, выходной сигнал контроллера траектории может представлять собой оптимизированную траекторию, которая может передаваться в силовую передачу 1200, на колеса 1400 или то и другое. В некоторых вариантах выполнения оптимизированная траектория может представлять собой управляющие входные сигналы, например, множество углов поворота колес, причем каждый угол поворота колес соответствует определенному моменту времени или положению. В некоторых вариантах выполнения оптимизированная траектория может представлять собой один или более путей, линий, кривых или их сочетание.
[0046] Одно или более колес 1400 могут представлять собой управляемое колесо, которое может поворачиваться в соответствии с углом поворота колес под управлением блока 1230 рулевого управления, самоходное колесо, на которое может передаваться крутящий момент для приведения в движение транспортного средства 1000 под управлением трансмиссии 1220, или управляемое и самоходное колесо, которое может управлять и приводить в движение транспортное средство 1000.
[0047] Хотя не показано на Фиг. 1, транспортное средство может включать в себя блоки или элементы, не показанные на Фиг. 1, например, корпус, модуль Bluetooth®, радиоблок с частотной модуляцией (FM), модуль коммуникации ближнего поля (NFC), жидкокристаллический (LCD) блок отображения, блок отображения на основе органических светодиодов (OLED), динамик или любое их сочетание.
[0048] В некоторых вариантах выполнения транспортное средство 1000 может представлять собой автономное транспортное средство. Автономное транспортное средство может управляться автономно без непосредственного вмешательства человека для перемещения по участку сети движения транспортных средств. Хотя это отдельно не показано на Фиг. 1, в некоторых реализациях автономное транспортное средство может включать в себя блок управления автономным транспортным средством, который может выполнять построение маршрута автономного транспортного средства, навигацию и управление. В некоторых реализациях блок управления автономным транспортным средством может быть интегрирован с другим блоком транспортного средства. Например, контроллер 1300 может включать в себя блок управления автономным транспортным средством.
[0049] В некоторых реализациях блок управления автономным транспортным средством может управлять транспортным средством 1000 для перемещения по участку сети движения транспортных средств в соответствии с текущими рабочими параметрами транспортного средства. В другом примере блок управления автономным транспортным средством может управлять транспортным средством 1000 для выполнения заданной операции или маневра, например, парковки транспортного средства. В другом примере блок управления автономным транспортным средством может генерировать маршрут перемещение из места отправления, например, текущего местоположения транспортного средства 1000, в место назначения на основе информации о транспортном средстве, информации об окружающей среде, информации о сети движения транспортных средств, представляющей сеть движения транспортных средств, или их сочетания, и может управлять транспортным средством 1000 для перемещения по сети движения транспортных средств в соответствии с маршрутом. Например, блок управления автономным транспортным средством может выводить маршрут перемещения в контроллер траектории, который может управлять транспортным средством 1000 для перемещения из места отправления в место назначения с использованием сгенерированного маршрута.
[0050] Фиг. 2 представляет собой схематическое изображение примера участка системы движения и связи транспортных средств, в которой могут быть реализованы аспекты, признаки и элементы, раскрытые в настоящем документе. Система 2000 движения и связи транспортных средств может включать в себя одно или более транспортных средств 2100/2110, например, транспортное средство 1000, показанное на Фиг. 1, которое может перемещаться по одному или более участкам одной или более сетей 2200 движения транспортных средств и может осуществлять связь посредством одной или более сетей 2300 электронной связи. Хотя это явно не показано на Фиг. 2, транспортное средство может перемещаться по участку, который не явно или не полностью включен в сеть движения транспортных средств, например, по бездорожью.
[0051] В некоторых вариантах выполнения сеть 2300 электронной связи может представлять собой, например, систему множественного доступа и может обеспечивать связь, например, голосовую связь, передачу данных, видеосвязь, обмен сообщениями или их сочетание, между транспортным средством 2100/2110 и одним или более устройствами 2400 связи. Например, транспортное средство 2100/2110 может принимать информацию, например, информацию, представляющую сеть 2200 движения транспортных средств, от устройства 2400 связи по сети 2300.
[0052] В некоторых вариантах выполнения транспортное средство 2100/2110 может осуществлять связь через проводной канал связи (не показан), беспроводной канал 2310/2320/2370 связи или сочетание любого количества проводных или беспроводных каналов связи. Например, как показано, транспортное средство 2100/2110 может осуществлять связь через наземный канал 2310 связи, через беспроводной канал 2320 связи, не связанный с землей, или их сочетание. В некоторых реализациях наземный беспроводной канал 2310 связи может включать в себя канал Ethernet, канал последовательной передачи данных, канал Bluetooth, инфракрасный (IR) канал, ультрафиолетовый (UV) канал или любой канал, выполненный с возможностью обеспечения электронной связи.
[0053] В некоторых вариантах выполнения транспортное средство 2100/2110 может осуществлять связь с другим транспортным средством 2100/2110. Например, основное или рассматриваемое транспортное средство (HV) 2100 может принимать одно или более автоматических сообщений, передаваемых между транспортными средствами, например, базовое сообщение безопасности (BSM), от удаленного или целевого транспортного средства (RV) 2110 по каналу 2370 прямой связи или по сети 2300. Например, удаленное транспортное средство 2110 может передавать сообщение основным транспортным средствам в пределах заданного диапазона вещания, например, 300 метров. В некоторых вариантах выполнения основное транспортное средство 2100 может принимать сообщение через третью сторону, например, повторитель сигнала (не показан) или другое удаленное транспортное средство (не показано). В некоторых вариантах выполнения транспортное средство 2100/2110 может передавать одно или более автоматических сообщений, передаваемых между транспортными средствами, на основе, например, заданного интервала, например, 100 миллисекунд.
[0054] Автоматические сообщения, передаваемые между транспортными средствами, могут включать в себя идентификационную информацию транспортного средства, информацию о геопространственном положении, например, информацию о долготе, широте или высоте над уровнем моря, информацию о точности геопространственного положения, информацию о кинематическом состоянии, например, информацию об ускорении транспортного средства, информацию о скорости рыскания, информацию о скорости, информацию о курсе транспортного средства, информацию о состоянии тормозной системы, информацию о дроссельной заслонке, информацию об угле поворота колес, информацию о маршруте транспортного средства или информацию о рабочем состоянии транспортного средства, например, информацию о размере транспортного средства, информацию о состоянии фар, информацию о сигнале поворота, информацию о состоянии стеклоочистителя, информацию о трансмиссии или любую другую информацию или сочетание информации, связанной с состоянием передающего транспортного средства. Например, информация о состоянии трансмиссии может указывать, находится ли трансмиссия передающего транспортного средства в нейтральном режиме, режиме парковки, режиме движения вперед или режиме заднего хода.
[0055] В некоторых вариантах выполнения транспортное средство 2100 может осуществлять связь с сетью 2300 связи через точку 2330 доступа. Точка 2330 доступа, которая может включать в себя вычислительное устройство, может быть выполнена с возможностью связи с транспортным средством 2100, с сетью 2300 связи, с одним или более устройствами 2400 связи или с их сочетанием по проводным или беспроводным каналам 2310/2340 связи. Например, точка 2330 доступа может представлять собой базовую станцию, базовую приемопередающую станцию (BTS), базовую станцию типа Node-B, базовую станцию типа enhanced Node-B (eNode-B), базовую станцию типа Home Node-B (HNode-B), беспроводной маршрутизатор, проводной маршрутизатор, концентратор, ретранслятор, коммутатор или любое подобное проводное или беспроводное устройство. Хотя на фигуре показан единый блок, точка доступа может включать в себя любое количество взаимосвязанных элементов.
[0056] В некоторых вариантах выполнения транспортное средство 2100 может осуществлять связь с сетью 2300 связи через спутник 2350 или другое не наземное устройство связи. Спутник 2350, который может включать в себя вычислительное устройство, может быть выполнен с возможностью связи с транспортным средством 2100, с сетью 2300 связи, с одним или более устройствами 2400 связи или с их сочетанием по одному или более каналам 2320/2360 связи. Хотя на фигуре показан единый блок, спутник может включать в себя любое количество взаимосвязанных элементов.
[0057] Сеть 2300 электронной связи может представлять собой сеть любого типа, выполненную с возможностью обеспечения голосовой связи, обмена данными или любого другого типа электронной связи. Например, сеть 2300 электронной связи может включать в себя локальную сеть (LAN), глобальную сеть (WAN), виртуальную частную сеть (VPN), сеть мобильной или сотовой телефонной связи, сеть Интернет или любую другую систему электронной связи. Сеть 2300 электронной связи может использовать протокол связи, например, протокол управления передачей (TCP), протокол пользовательских датаграмм (UDP), межсетевой протокол (IP), протокол передачи в реальном времени (RTP), протокол передачи гипертекста (HTTP) или их сочетание. Хотя на фигуре показан единый блок, сеть электронной связи может включать в себя любое количество взаимосвязанных элементов.
[0058] В некоторых вариантах выполнения транспортное средство 2100 может определять участок или состояние сети 2200 движения транспортных средств. Например, транспортное средство может включать в себя один или более бортовых датчиков 2105, например, датчик 1360, показанный на Фиг. 1, который может включать в себя датчик скорости, датчик скорости колес, камеру, гироскоп, оптический датчик, лазерный датчик, радиолокационный датчик, звуковой датчик или любой другой датчик или устройство или сочетание устройств, выполненных с возможностью определения или идентификации участка или состояния сети 2200 движения транспортных средств.
[0059] В некоторых вариантах выполнения транспортное средство 2100 может перемещаться по участку или участкам одной или более сетей 2200 движения транспортных средств с использованием информации, передаваемой по сети 2300, например, информации, представляющей сеть 2200 движения транспортных средств, информации, определенной одним или более бортовыми датчиками 2105, или их сочетания.
[0060] Хотя для простоты на Фиг. 2 показано одно транспортное средство 2100, одна сеть 2200 движения транспортных средств, одна сеть 2300 электронной связи и одно устройство 2400 связи, может быть использовано любое количество транспортных средств, сетей или вычислительных устройств. В некоторых вариантах выполнения система 2000 движения и связи транспортных средств может включать в себя устройства, блоки или элементы, не показанные на Фиг. 2. Хотя транспортное средство 2100 показано в виде единого блока, транспортное средство может включать в себя любое количество взаимосвязанных элементов.
[0061] Хотя показано, что транспортное средство 2100 осуществляет связь с устройством 2400 связи по сети 2300, транспортное средство 2100 может осуществлять связь с устройством 2400 связи через любое количество каналов прямой или непрямой связи. Например, транспортное средство 2100 может осуществлять связь с устройством 2400 связи через канал прямой связи, например, канал связи Bluetooth.
[0062] В некоторых вариантах выполнения транспортное средство 2100/2210 может быть связано с субъектом 2500/2510, например, водителем, оператором или владельцем транспортного средства. В некоторых вариантах выполнения субъект 2500/2510, связанный с транспортным средством 2100/2110, может быть связан с одним или более персональными электронными устройствами 2502/2504/2512/2514, например, смартфоном 2502/2512 или компьютером 2504/2514. В некоторых вариантах выполнения персональное электронное устройство 2502/2504/2512/2514 может осуществлять связь с соответствующим транспортным средством 2100/2110 через канал прямой или непрямой связи. Хотя на Фиг. 2 показан один субъект 2500/2510, связанный с одним транспортным средством 2100/2110, любое количество транспортных средств может быть связано с субъектом, и любое количество субъектов может быть связано с транспортным средством.
[0063] Фиг. 3 представляет собой схематическое изображение участка сети движения транспортных средств в соответствии с настоящим изобретением. Сеть 3000 движения транспортных средств может включать в себя одну или более не подходящих для движения областей 3100, например, здание, одну или более частично подходящих для движения областей, например, парковочную область 3200, одну или более подходящих для движения областей, например, дороги 3300/3400, или их сочетание. В некоторых вариантах выполнения автономное транспортное средство, например, транспортное средство 1000, показанное на Фиг. 1, одно из транспортных средств 2100/2110, показанных на Фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство с автономным управлением, может перемещаться по участку или участкам сети 3000 движения транспортных средств.
[0064] Сеть движения транспортных средств может включать в себя одну или более развязок 3210 между одной или более подходящими для движения или частично подходящими для движения областями 3200/3300/3400. Например, участок сети движения транспортных средств, показанный на Фиг. 3, включает в себя развязку 3210 между парковочной областью 3200 и дорогой 3400. В некоторых вариантах выполнения парковочная область 3200 может включать в себя парковочные места 3220.
[0065] Участок сети движения транспортных средств, например, дорога 3300/3400, может включать в себя одну или более полос 3320/3340/3360/3420/3440 и может быть связан с одним или более направлениями движения, которые показаны стрелками на Фиг. 3.
[0066] В некоторых вариантах выполнения сеть движения транспортных средств или ее участок, например, участок сети движения транспортных средств, показанный на Фиг. 3, может быть представлена в виде информации о сети движения транспортных средств. Например, информация о сети движения транспортных средств может быть выражена в виде иерархии элементов, например, элементов языка разметки, которые могут храниться в базе данных или в файле. Для простоты фигуры в настоящем документе иллюстрируют информацию о сети движения транспортных средств, представляющую участки сети движения транспортных средств в виде схем или карт; однако информация о сети движения транспортных средств может быть выражена в любой используемой компьютером форме, выполненной с возможностью представления сети движения транспортных средств или ее участка. В некоторых вариантах выполнения информация о сети движения транспортных средств может включать в себя информацию об управлении сетью движения транспортных средств, например, информацию о направлении движения, информацию об ограничении скорости, информацию о платных дорогах, информацию об уклонах, например, информацию о наклонах или углах, информацию о материале поверхности, эстетическую информацию или их сочетание.
[0067] В некоторых вариантах выполнения участок или сочетание участков сети движения транспортных средств могут быть определены как интересующее место или место назначения. Например, информация о сети движения транспортных средств может определять здание, например, не подходящую для движения область 3100, и смежную частично подходящую для движения парковочную область 3200 как интересующее место, автономное транспортное средство может определять интересующее место как место назначения, и автономное транспортное средство может перемещаться из места отправления в место назначения по сети движения транспортных средств. Хотя на Фиг. 3 парковочная область 3200, связанная с не подходящей для движения областью 3100, показана смежно с не подходящей для движения областью 3100, место назначения может включать в себя, например, здание и парковочную область, которая в физическом или геопространственном отношении не прилегает к зданию.
[0068] В некоторых вариантах выполнения определение места назначения может включать в себя определение местоположения места назначения, которое может представлять собой дискретное, уникально определяемое географическое местоположение. Например, сеть движения транспортных средств может включать в себя определенное местоположение, например, адрес улицы, почтовый адрес, адрес сети движения транспортных средств, адрес GPS или их сочетание, для места назначения.
[0069] В некоторых вариантах выполнения место назначения может быть связано с одним или более входами, например, с входом 3500, показанным на Фиг. 3. В некоторых вариантах выполнения информация о сети движения транспортных средств может включать в себя заданную информацию о местоположении входа, например, информацию, определяющую географическое местоположение входа, связанного с местом назначения. В некоторых вариантах выполнения прогнозируемая информация о местоположении входа может быть определена, как описано в настоящем документе.
[0070] В некоторых вариантах выполнения сеть движения транспортных средств может быть связана или может включать в себя сеть движения пешеходов. Например, Фиг. 3 включает в себя участок 3600 сети движения пешеходов, который может представлять собой пешеходную дорожку. В некоторых вариантах выполнения сеть движения пешеходов или ее участок, например, участок 3600 сети движения пешеходов, показанный на Фиг. 3, может быть представлен в виде информации о сети движения пешеходов. В некоторых вариантах выполнения информация о сети движения транспортных средств может включать в себя информацию о сети движения пешеходов. Сеть движения пешеходов может включать в себя области, подходящие для движения пешеходов. Области, подходящие для движения пешеходов, например, пешеходная дорожка или тротуар, могут соответствовать не подходящим для движения областям сети движения транспортных средств. Хотя это отдельно не показано на Фиг. 3, области, подходящие для движения пешеходов, например, пешеходный переход, могут соответствовать подходящей для движения области или частично подходящей для движения области сети движения транспортных средств.
[0071] В некоторых вариантах выполнения место назначения может быть связано с одним или более местами стыковки, например, с местом 3700 стыковки, показанным на Фиг. 3. Место 3700 стыковки может представлять собой обозначенное или необозначенное место или область вблизи места назначения, где автономное транспортное средство может остановиться, встать или припарковаться, чтобы могли быть выполнены операции стыковки, например, посадка и высадка пассажиров.
[0072] В некоторых вариантах выполнения информация о сети движения транспортных средств может включать в себя информацию о месте стыковки, например, информацию, определяющую географическое местоположение одного или более мест 3700 стыковки, связанных с местом назначения. В некоторых вариантах выполнения информация о месте стыковки может представлять собой заданную информацию о месте стыковки, которая может представлять собой информацию о месте стыковки, вручную добавленную к информации о сети движения транспортных средств. Например, заданная информация о месте стыковки может быть добавлена к информации о сети движения транспортных средств на основе пользовательского ввода. В некоторых вариантах выполнения информация о месте стыковки может представлять собой автоматически генерируемую информацию о месте стыковки, как описано в настоящем документе. Хотя это отдельно не показано на Фиг. 3, информация о месте стыковки может определять тип операции стыковки, связанной с местом 3700 стыковки. Например, место назначения может быть связано с первым местом стыковки для посадки пассажиров и вторым местом стыковки для высадки пассажиров. Хотя автономное транспортное средство может припарковаться рядом с местом стыковки, место стыковки, связанное с местом назначения, может быть независимым и может отличаться от парковочной области, связанной с местом назначения.
[0073] В примере автономное транспортное средство может определять интересующее место, которое может включать в себя не подходящую для движения область 3100, парковочную область 3200 и вход 3500, как место назначения. Автономное транспортное средство может определять не подходящую для движения область 3100 или вход 3500 как основное место назначения для интересующего места и может определять парковочную область 3200 как вспомогательное место назначения. Автономное транспортное средство может определять место 3700 стыковки как место стыковки для основного места назначения. Автономное транспортное средство может генерировать маршрут из места отправления (не показано) в место 3700 стыковки. Автономное транспортное средство может перемещаться по сети движения транспортных средств из места отправления в место 3700 стыковки с использованием маршрута. Автономное транспортное средство может остановиться или припарковаться в месте 3700 стыковки для выполнения посадки или высадки пассажиров. Автономное транспортное средство может генерировать последовательный маршрут от места 3700 стыковки до парковочной области 3200, может перемещаться по сети движения транспортных средств от места 3700 стыковки до парковочной области 3200 с использованием последовательного маршрута и может припарковаться в парковочной области 3200.
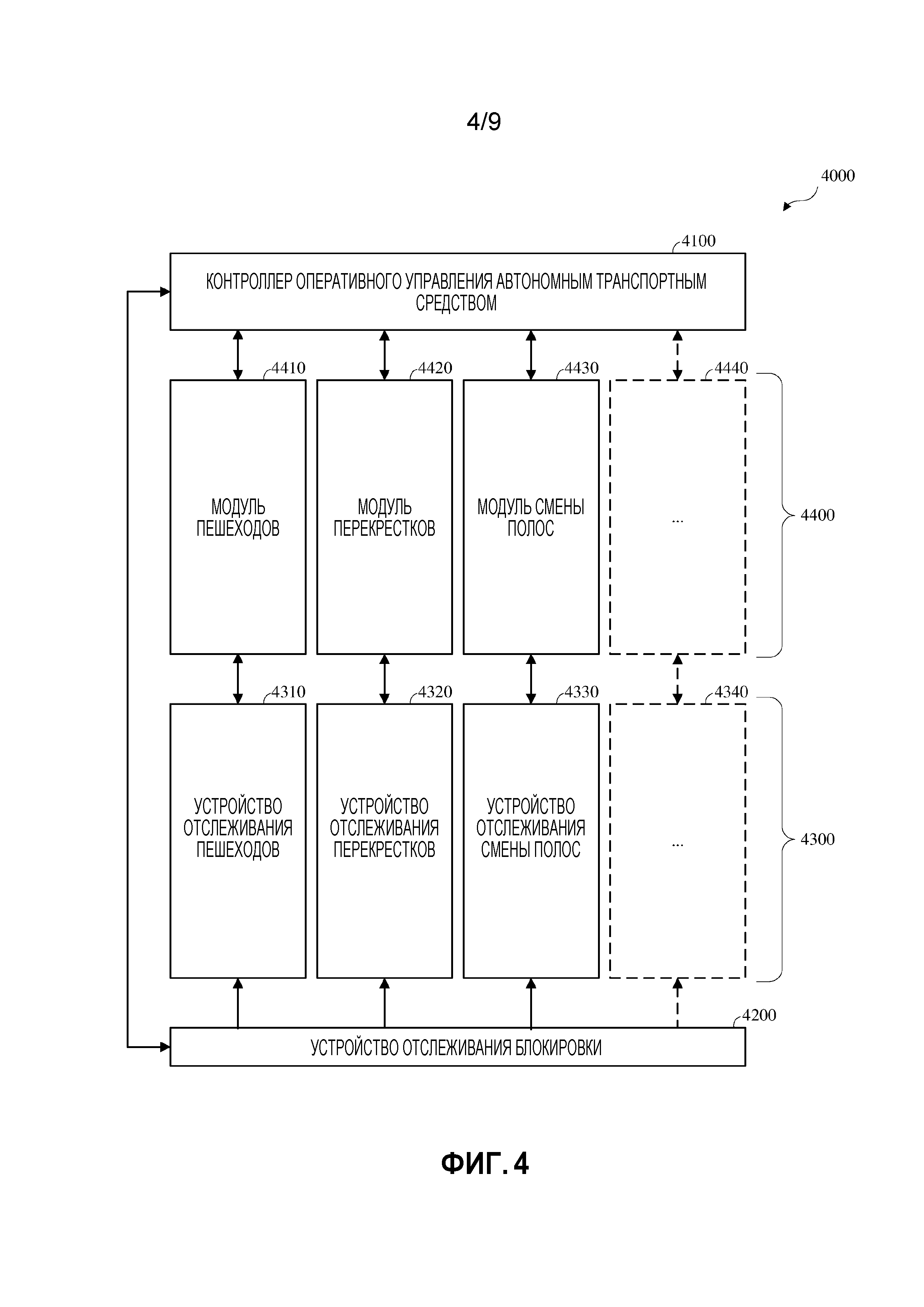
[0074] Фиг. 4 представляет собой схематическое изображение примера системы 4000 оперативного управления автономным транспортным средством в соответствии с вариантами выполнения настоящего изобретения. Система 4000 оперативного управления автономным транспортным средством может быть реализована в автономном транспортном средстве, например, транспортном средстве 1000, показанном на Фиг. 1, одном из транспортных средств 2100/2110, показанных на Фиг. 2, полуавтономном транспортном средстве или любом другом транспортном средстве с автономным управлением.
[0075] Автономное транспортное средство может перемещаться по сети движения транспортных средств или ее участку, что может включать в себя прохождение отдельных оперативных сценариев транспортного средства. Отдельный оперативный сценарий транспортного средства может включать в себя любое четко определяемое множество рабочих условий, которые могут оказывать влияние на работу автономного транспортного средства в пределах заданной пространственно-временной области или оперативной среды автономного транспортного средства. Например, отдельный оперативный сценарий транспортного средства может быть основан на количестве дорог, дорожных сегментов или полос, по которым может перемещаться автономное транспортное средство в пределах заданного пространственно-временного расстояния. В другом примере отдельный оперативный сценарий транспортного средства может быть основан на одном или боле устройствах управления дорожным движением, которые могут оказывать влияние на работу автономного транспортного средства в пределах заданной пространственно-временной области или оперативной среды автономного транспортного средства. В другом примере отдельный оперативный сценарий транспортного средства может быть основан на одном или более определяемых правилах, нормах или законах, которые могут оказывать влияние на работу автономного транспортного средства в пределах заданной пространственно-временной области или оперативной среды автономного транспортного средства. В другом примере отдельный оперативный сценарий транспортного средства может быть основан на одном или более определяемых внешних объектах, которые могут оказывать влияние на работу автономного транспортного средства в пределах заданной пространственно-временной области или оперативной среды автономного транспортного средства.
[0076] Примеры отдельных оперативных сценариев транспортного средства включают в себя отдельный оперативный сценарий транспортного средства, в котором автономное транспортное средство пересекает перекресток; отдельный оперативный сценарий транспортного средства, в котором пешеход пересекает или приближается к ожидаемому пути автономного транспортного средства; и отдельный оперативный сценарий транспортного средства, в котором автономное транспортное средство меняет полосы.
[0077] Для простоты и ясности подобные оперативные сценарии транспортного средства могут быть описаны в настоящем документе со ссылкой на типы или классы оперативных сценариев транспортного средства. Например, оперативные сценарии транспортного средства, включающие в себя пешеходов, могут упоминаться в настоящем документе как сценарии, включающие в себя пешеходов, относящиеся к типам или классам оперативных сценариев транспортного средства, которые включают в себя пешеходов. В качестве примера первый оперативный сценарий транспортного средства, включающий в себя пешеходов, может включать в себя пешехода, переходящего дорогу по пешеходному переходу, а второй оперативный сценарий транспортного средства, включающий в себя пешеходов, может включать в себя пешехода, переходящего дорогу в неположенном месте. Хотя в настоящем документе описаны оперативные сценарии транспортного средства, включающие в себя пешеходов, оперативные сценарии транспортного средства, включающие в себя перекрестки, и оперативные сценарии транспортного средства, включающие в себя смену полос, может быть использован другой оперативный сценарий транспортного средства или тип оперативного сценария транспортного средства.
[0078] Аспекты оперативной среды автономного транспортного средства могут быть представлены в рамках соответствующих отдельных оперативных сценариев транспортного средства. Например, относительная ориентация, траектория, ожидаемый путь внешних объектов могут быть представлены в рамках соответствующих отдельных оперативных сценариев транспортного средства. В другом примере относительная геометрия сети движения транспортных средств может быть представлена в рамках соответствующих отдельных оперативных сценариев транспортного средства.
[0079] В качестве примера первый отдельный оперативный сценарий транспортного средства может соответствовать пешеходу, переходящему дорогу по пешеходному переходу, и относительная ориентация и ожидаемый путь пешехода, например, переход слева направо или переход справа налево, могут быть представлены в рамках первого отдельного оперативного сценария транспортного средства. Второй отдельный оперативный сценарий транспортного средства может соответствовать пешеходу, переходящему дорогу в неположенном месте, и относительная ориентация и ожидаемый путь пешехода, например, переход слева направо или переход справа налево, могут быть представлены в рамках второго отдельного оперативного сценария транспортного средства.
[0080] В некоторых вариантах выполнения автономное транспортное средство может проходить множество отдельных оперативных сценариев транспортного средства в пределах оперативной среды, которые могут представлять собой аспекты составного оперативного сценария транспортного средства. Например, пешеход может приближаться к ожидаемому пути автономного транспортного средства, пересекая перекресток.
[0081] Система 4000 оперативного управления автономным транспортным средством может управлять автономным транспортным средством для прохождения отдельных оперативных сценариев транспортного средства с учетом заданных ограничений, например, ограничений безопасности, правовых ограничений, физических ограничений, ограничений приемлемости со стороны пользователя или любых других ограничений или сочетания ограничений, которые могут быть заданы или выведены для работы автономного транспортного средства.
[0082] В некоторых вариантах выполнения управление автономным транспортным средством для прохождения отдельных оперативных сценариев транспортного средства может включать в себя определение или обнаружение отдельных оперативных сценариев транспортного средства, определение возможных действий по управлению транспортным средством на основе отдельных оперативных сценариев транспортного средства, управление автономным транспортным средством для перемещения по участку сети движения транспортных средств в соответствии с одним или более возможными действиями по управлению транспортным средством или их сочетание.
[0083] Действие по управлению транспортным средством может указывать операцию или маневр для управления транспортным средством, например, ускорение, замедление, поворот, остановку или любую другую операцию транспортного средства или сочетание операций транспортного средства, которые могут выполняться автономным транспортным средством в сочетании с перемещением по участку сети движения транспортных средств.
[0084] Контроллер 4100 оперативного управления автономным транспортным средством или другой блок автономного транспортного средства может управлять автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку в соответствии с действием по управлению транспортным средством.
[0085] Например, контроллер 4100 оперативного управления автономным транспортным средством может управлять автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку в соответствии с действием по управлению транспортным средством «остановиться» для остановки автономного транспортного средства или иного управления автономным транспортным средством для приведения в неподвижное состояние или поддержание его.
[0086] В другом примере контроллер 4100 оперативного управления автономным транспортным средством может управлять автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку в соответствии с действием по управлению транспортным средством «продвинуться вперед» для медленного продвижения вперед на короткое расстояние, например, на несколько дюймов или фут.
[0087] В другом примере контроллер 4100 оперативного управления автономным транспортным средством может управлять автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку в соответствии с действием по управлению транспортным средством «ускориться» путем ускорения с заданным темпом ускорения или с темпом ускорения в пределах заданного диапазона.
[0088] В другом примере контроллер 4100 оперативного управления автономным транспортным средством может управлять автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку в соответствии с действием по управлению транспортным средством «замедлиться» путем замедления с заданным темпом замедления или с темпом замедления в пределах заданного диапазона.
[0089] В другом примере контроллер 4100 оперативного управления автономным транспортным средством может управлять автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку в соответствии с действием по управлению транспортным средством «поддерживать» путем управления автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку в соответствии с текущими рабочими параметрами, например, путем поддержания текущей скорости, поддержания текущего пути или маршрута, поддержания текущей ориентации на полосе или т.п.
[0090] В другом примере контроллер 4100 оперативного управления автономным транспортным средством может управлять автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку в соответствии с действием по управлению транспортным средством «продолжить» путем управления автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку путем запуска или возобновления ранее определенного множества оперативных параметров, что может включать в себя управление автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку в соответствии с одним или более другими действиями по управлению транспортным средством. Например, автономное транспортное средство может быть неподвижным на перекрестке, определенный маршрут автономного транспортного средства может включать в себя пересечение перекрестка, и управление автономным транспортным средством в соответствии с действием по управлению транспортным средством «продолжить» может включать в себя управление автономным транспортным средством для ускорения с заданным темпом ускорения до заданной скорости вдоль определенного пути. В другом примере автономное транспортное средство может перемещаться по участку сети движения транспортных средств с заданной скоростью, для автономного транспортного средства может быть определена смена полосы, и управление автономным транспортным средством в соответствии с действием по управлению транспортным средством «продолжить» может включать в себя управление автономным транспортным средством для выполнения последовательности корректировок траектории в соответствии с заданными параметрами смены полосы, чтобы автономное транспортное средство выполнило определенную операцию смены полосы.
[0091] В некоторых вариантах выполнения действие по управлению транспортным средством может включать в себя один или более показателей эффективности. Например, действие по управлению транспортным средством «остановиться» может включать в себя темп замедления в качестве показателя эффективности. В другом примере действие по управлению транспортным средством «продолжить» может четко указывать информацию о маршруте или пути, информацию о скорости, темп ускорения или их сочетание в качестве показателей эффективности или может явно или неявно указывать, что может поддерживаться текущий или ранее определенный путь, скорость, темп ускорения или их сочетание.
[0092] В некоторых вариантах выполнения действие по управлению транспортным средством может представлять собой составное действие по управлению транспортным средством, которое может включать в себя последовательность, сочетание или последовательность и сочетание действий по управлению транспортным средством. Например, действие по управлению транспортным средством «продвинуться вперед» может указывать действие по управлению транспортным средством «остановиться, последующее действие по управлению транспортным средством «ускориться», связанное с заданным темпом ускорения, и последующее действие по управлению транспортным средством «остановиться», связанное с заданным темпом замедления, так что управление автономным транспортным средством в соответствии с действием по управлению транспортным средством «продвинуться вперед» включает в себя управление автономным транспортным средством для медленного продвижения вперед на короткое расстояние, например, на несколько дюймов или фут.
[0093] В некоторых вариантах выполнения система 4000 оперативного управления автономным транспортным средством может включать в себя контроллер 4100 оперативного управления автономным транспортным средством, устройство 4200 отслеживания блокировки, устройства 4300 отслеживания оперативной среды, модули 4400 оценки оперативного управления для конкретных сценариев или их сочетание. Хотя описано отдельно, устройство 4200 отслеживания блокировки может представлять собой экземпляр или экземпляры устройства 4300 отслеживания оперативной среды.
[0094] Контроллер 4100 оперативного управления автономным транспортным средством может принимать, определять или иным образом получать доступ к информации об оперативной среде, представляющей оперативную среду автономного транспортного средства, например, текущую оперативную среду или ожидаемую оперативную среду или один или более ее аспектов. Оперативная среда автономного транспортного средства может включать в себя четко определяемое множество рабочих условий, которые могут оказывать влияние на работу автономного транспортного средства в пределах заданной пространственно-временной области автономного транспортного средства.
[0095] Например, информация об оперативной среде может включать в себя информацию об автономном транспортном средстве, например, информацию, указывающую геопространственное местоположение автономного транспортного средства, информацию, сопоставляющую геопространственное местоположение автономного транспортного средства с информацией, представляющей сеть движения транспортных средств, маршрут автономного транспортного средства, скорость автономного транспортного средства, состояние ускорения автономного транспортного средства, информацию о пассажирах автономного транспортного средства или любую другую информацию об автономном транспортном средстве или работе автономного транспортного средства.
[0096] В другом примере информация об оперативной среде может включать в себя информацию, представляющую сеть движения транспортных средств вблизи автономного транспортного средства, например, в пределах заданного пространственного расстояния до автономного транспортного средства, например, 300 метров, информацию, указывающую геометрию одного или более аспектов сети движения транспортных средств, информацию, указывающую состояние сети движения транспортных средств, например, состояние поверхности, или любое их сочетание.
[0097] В другом примере информация об оперативной среде может включать в себя информацию, представляющую внешние объекты в пределах оперативной среды автономного транспортного средства, например, информацию, представляющую пешеходов, животных, немоторизованные транспортные средства, например, велосипеды или скейтборды, моторизованные транспортные средства, например, удаленные транспортные средства, или любой другой внешний объект или субъект, который может оказывать влияние на работу автономного транспортного средства.
[0098] В некоторых вариантах выполнения контроллер 4100 оперативного управления автономным транспортным средством может отслеживать оперативную среду автономного транспортного средства или ее определенные аспекты. В некоторых вариантах выполнения отслеживание оперативной среды автономного транспортного средства может включать в себя определение и отслеживание внешних объектов, определение отдельных оперативных сценариев транспортного средства или их сочетание.
[0099] Например, контроллер 4100 оперативного управления автономным транспортным средством может определять и отслеживать внешние объекты в оперативной среде автономного транспортного средства. Определение и отслеживание внешних объектов может включать в себя определение пространственно-временного местоположения соответствующих внешних объектов, которое может быть представлено относительно автономного транспортного средства, определение одного или более ожидаемых путей соответствующих внешних объектов, что может включать в себя определение скорости, траектории или скорости и траектории внешнего объекта. Для простоты и ясности в описаниях местоположений, ожидаемых местоположений, путей, ожидаемых путей и т.п. в настоящем документе могут быть опущены прямые указания, что соответствующие местоположения и пути относятся к геопространственным и временным компонентам; однако, если в настоящем документе четко не указано иное, или иное однозначно не очевидно из контекста, местоположения, ожидаемые местоположения, пути, ожидаемые пути и т.п., описанные в настоящем документе, могут включать в себя геопространственные компоненты, временные компоненты или те и другие.
[0100] В некоторых вариантах выполнения устройства 4300 отслеживания оперативной среды могут включать в себя устройство 4310 отслеживания оперативной среды для отслеживания пешеходов (устройство отслеживания пешеходов), устройство 4320 отслеживания оперативной среды для отслеживания перекрестков (устройство отслеживания перекрестков), устройство 4330 отслеживания оперативной среды для отслеживания смены полос (устройство отслеживания смены полос) или их сочетание. Устройство 4340 отслеживания оперативной среды показано пунктирными линиями для указания, что система 4000 оперативного управления автономным транспортным средством может включать в себя любое количество устройств 4300 отслеживания оперативной среды.
[0101] Один или более отдельных оперативных сценариев транспортного средства могут отслеживаться соответствующим устройством 4300 отслеживания оперативной среды. Например, устройство 4310 отслеживания пешеходов может отслеживать информацию об оперативной среде, соответствующую множеству оперативных сценариев транспортного средства, включающих в себя пешеходов, устройство 4320 отслеживания перекрестков может отслеживать информацию об оперативной среде, соответствующую множеству оперативных сценариев транспортного средства, включающих в себя перекрестки, и устройство 4330 отслеживания смены полос может отслеживать информацию об оперативной среде, соответствующую множеству оперативных сценариев транспортного средства, включающих в себя смену полос.
[0102] Устройство 4300 отслеживания оперативной среды может принимать или иным образом получать доступ к информации об оперативной среде, например, информации об оперативной среде, сгенерированной или собранной одним или более датчиками автономного транспортного средства, информации о сети движения транспортных средств, информации о геометрии сети движения транспортных средств, или их сочетанию. Например, устройство 4310 отслеживания оперативной среды для отслеживания пешеходов может принимать или иным образом получать доступ к информации, например, информации датчика, которая может указывать, соответствовать или может быть иным образом связана с одним или более пешеходами в оперативной среде автономного транспортного средства.
[0103] В некоторых вариантах выполнения устройство 4300 отслеживания оперативной среды может связывать информацию об оперативной среде или ее часть с оперативной средой или ее аспектом, например, с внешним объектом, например, пешеходом, удаленным транспортным средством, или аспектом геометрии сети движения транспортных средств.
[0104] В некоторых вариантах выполнения устройство 4300 отслеживания оперативной среды может генерировать или иным образом определять информацию, представляющую один или более аспектов оперативной среды, например, внешний объект, например, пешехода, удаленное транспортное средство, или аспект геометрии сети движения транспортных средств, что может включать в себя фильтрацию, абстрагирование или иную обработку информации об оперативной среде.
[0105] В некоторых вариантах выполнения устройство 4300 отслеживания оперативной среды может выводить информацию, представляющую один или более аспектов оперативной среды, или обеспечивать доступ для контроллера 4100 оперативного управления автономным транспортным средством, например, путем сохранения информации, представляющей один или более аспектов оперативной среды, в памяти, например, в памяти 1340, показанной на Фиг. 1, автономного транспортного средства, доступной контроллеру 4100 оперативного управления автономным транспортным средством, передачи информации, представляющей один или более аспектов оперативной среды, в контроллер 4100 оперативного управления автономным транспортным средством, или их сочетания. В некоторых вариантах выполнения устройство 4300 отслеживания оперативной среды может выводить информацию, представляющую один или более аспектов оперативной среды, в один или более элементов системы 4000 оперативного управления автономным транспортным средством, например, устройство 4200 отслеживания блокировки.
[0106] Например, устройство 4310 отслеживания оперативной среды для отслеживания пешеходов может соотносить, связывать или иным образом обрабатывать информацию об оперативной среде для определения, отслеживания или прогнозирования действий одного или более пешеходов. Например, устройство 4310 отслеживания оперативной среды для отслеживания пешеходов может принимать информацию, например, информацию датчика, от одного или более датчиков, которая может соответствовать одному или более пешеходам, устройство 4310 отслеживания оперативной среды для отслеживания пешеходов может связывать информацию датчика с одним или более обнаруженными пешеходами, что может включать в себя определение направления движения, пути, например, ожидаемого пути, текущей или ожидаемой скорости, текущего или ожидаемого темпа ускорения или их сочетания, для одного или более соответствующих обнаруженных пешеходов, и устройство 4310 отслеживания оперативной среды для отслеживания пешеходов может выводить определенную, связанную или сгенерированную информацию о пешеходах или обеспечивать доступ для контроллера 4100 оперативного управления автономным транспортным средством.
[0107] В другом примере устройство 4320 отслеживания оперативной среды для отслеживания перекрестов может соотносить, связывать или иным образом обрабатывать информацию об оперативной среде для определения, отслеживания или прогнозирования действий одного или более удаленных транспортных средств в оперативной среде автономного транспортного средства для определения перекрестка или его аспекта в оперативной среде автономного транспортного средства, для определения геометрии сети движения транспортных средств или их сочетания. Например, устройство 4310 отслеживания оперативной среды для отслеживания перекрестков может принимать информацию, например, информацию датчика, от одного или более датчиков, которая может соответствовать одному или более удаленным транспортным средствам в оперативной среде автономного транспортного средства, перекрестку или одному или более его аспектам в оперативной среде автономного транспортного средства, геометрии сети движения транспортных средств или их сочетанию, устройство 4310 отслеживания оперативной среды для отслеживания перекрестков может связывать информацию датчика с одним или более обнаруженными удаленными транспортными средствами в оперативной среде автономного транспортного средства, перекрестком или одним или более его аспектами в оперативной среде автономного транспортного средства, геометрией сети движения транспортных средств или их сочетанием, что может включать в себя определение текущего или ожидаемого направления движения, пути, например, ожидаемого пути, текущей или ожидаемой скорости, текущего или ожидаемого темпа ускорения или их сочетания для одного или более соответствующих определенных удаленных транспортных средств, и устройство 4320 отслеживания оперативной среды для отслеживания перекрестков может выводить определенную, связанную или сгенерированную информацию о перекрестках или обеспечивать доступ для контроллера 4100 оперативного управления автономным транспортным средством.
[0108] В другом примере устройство 4330 отслеживания оперативной среды для отслеживания смены полосы может соотносить, связывать или иным образом обрабатывать информацию об оперативной среде для определения, отслеживания или прогнозирования действий одного или более удаленных транспортных средств в оперативной среде автономного транспортного средства, например, информацию, указывающую медленно движущееся или неподвижное удаленное транспортное средство на ожидаемом пути автономного транспортного средства, для определения одного или более аспектов оперативной среды автономного транспортного средства, например, геометрии сети движения транспортных средств в оперативной среде автономного транспортного средства, или их сочетания, которое в геопространственном отношении соответствует текущей или ожидаемой операции смены полосы. Например, устройство 4330 отслеживания оперативной среды для отслеживания смены полосы может принимать информацию, например, информацию датчика, от одного или более датчиков, которая может соответствовать одному или более удаленным транспортным средствам в оперативной среде автономного транспортного средства, одному или более аспектам оперативной среды автономного транспортного средства в оперативной среде автономного транспортного средства или их сочетанию, которое в геопространственном отношении соответствует текущей или ожидаемой операции смены полосы, устройство 4330 отслеживания оперативной среды для отслеживания смены полосы может связывать информацию датчика с одним или более обнаруженными удаленными транспортными средствами в оперативной среде автономного транспортного средства, одним или более аспектами оперативной среды автономного транспортного средства или их сочетанием, которое в геопространственном отношении соответствует текущей или ожидаемой операции смены полосы, что может включать в себя определение текущего или ожидаемого направления движения, пути, например, ожидаемого пути, текущей или ожидаемой скорости, текущего или ожидаемого темпа ускорения или их сочетания для одного или более соответствующих определенных удаленных транспортных средств, и устройство 4330 отслеживания оперативной среды для отслеживания перекрестков может выводить определенную, связанную или сгенерированную информацию о смене полос или обеспечивать доступ для контроллера 4100 оперативного управления автономным транспортным средством.
[0109] Контроллер 4100 оперативного управления автономным транспортным средством может определять один или более отдельных оперативных сценариев транспортного средства на основе одного или более аспектов оперативной среды, представленных информацией об оперативной среде. Например, контроллер 4100 оперативного управления автономным транспортным средством может определять отдельный оперативный сценарий транспортного средства в ответ на определение или на основе информации об оперативной среде, указанной одним или более устройствами 4300 отслеживания оперативной среды.
[0110] В некоторых вариантах выполнения контроллер 4100 оперативного управления автономным транспортным средством может определять множество отдельных оперативных сценариев транспортного средства на основе одного или более аспектов оперативной среды, представленных информацией об оперативной среде. Например, информация об оперативной среде может включать в себя информацию, представляющую пешехода, приближающегося к перекрестку вдоль ожидаемого пути автономного транспортного средства, и контроллер 4100 оперативного управления автономным транспортным средством может определять оперативный сценарий транспортного средства, включающий в себя пешеходов, оперативный сценарий транспортного средства, включающий в себя перекрестки, или тот и другой.
[0111] Контроллер 4100 оперативного управления автономным транспортным средством может создавать соответствующие экземпляры одного или более модулей 4400 оценки оперативного управления для конкретных сценариев на основе одного или более аспектов оперативной среды, представленных информацией об оперативной среде. Например, контроллер 4100 оперативного управления автономным транспортным средством может создавать экземпляр модуля 4400 оценки оперативного управления для конкретного сценария в ответ на определение отдельного оперативного сценария транспортного средства.
[0112] В некоторых вариантах выполнения контроллер 4100 оперативного управления автономным транспортным средством может создавать множество экземпляров одного или более модулей 4400 оценки оперативного управления для конкретных сценариев на основе одного или более аспектов оперативной среды, представленных информацией об оперативной среде. Например, информация об оперативной среде может указывать двух пешеходов в оперативной среде автономного транспортного средства, и контроллер 4100 оперативного управления автономным транспортным средством может создавать соответствующий экземпляр модуля 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, для каждого пешехода на основе одного или более аспектов оперативной среды, представленных информацией об оперативной среде.
[0113] В некоторых вариантах выполнения количество или число обнаруженных внешних объектов, например, пешеходов или удаленных транспортных средств, соответствующих сценарию, например, сценарию, включающему в себя пешеходов, сценарию, включающему в себя перекрестки, или сценарию, включающему в себя смену полос, может превышать заданное пороговое значение, которое может представлять собой заданное пороговое значение для конкретного сценария, и контроллер 4100 оперативного управления автономным транспортным средством может исключать создание экземпляра модуля 4400 оценки оперативного управления для конкретного сценария, соответствующего одному или более обнаруженным внешним объектам.
[0114] Например, информация об оперативной среде, указанная устройствами 4300 отслеживания оперативной среды, может указывать двадцать пять пешеходов в оперативной среде автономного транспортного средства, заданное пороговое значение для сценария, включающего в себя пешеходов, может представлять собой заданное количество, например, десять, пешеходов, контроллер 4100 оперативного управления автономным транспортным средством может определять десять наиболее значимых пешеходов, например, десять пешеходов, которые в геопространственном отношении находятся наиболее близко к автономному транспортному средству и имеют ожидаемые пути, сходящиеся с автономным транспортным средством, контроллер 4100 оперативного управления автономным транспортным средством может создавать десять экземпляров модуля 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, для десяти наиболее значимых пешеходов, и контроллер 4100 оперативного управления автономным транспортным средством может исключать создание экземпляров модуля 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, для пятнадцати других пешеходов.
[0115] В другом примере информация об оперативной среде, указанная устройствами 4300 отслеживания оперативной среды, может указывать перекресток, включающий в себя четыре дорожных сегмента, например, дорожный сегмент, идущий в северном направлении, дорожный сегмент, идущий в южном направлении дорожный сегмент, идущий в восточном направлении, и дорожный сегмент, идущий в западном направлении, и пять удаленных транспортных средств, соответствующих дорожному сегменту, идущему в северном направлении, три удаленных транспортных средства, соответствующих дорожному сегменту, идущему в южном направлении, четыре удаленных транспортных средства, соответствующих дорожному сегменту, идущему в восточном направлении, и два удаленных транспортных средства, соответствующих дорожному сегменту, идущему в западном направлении, заданное пороговое значение для сценария, включающего в себя перекрестки, может представлять собой заданное количество, например, два, удаленных транспортных средств для каждого дорожного сегмента, контроллер 4100 оперативного управления автономным транспортным средством может определять два наиболее значимых удаленных транспортных средства для каждого дорожного сегмента, например, два удаленных транспортных средства, которые в геопространственном отношении находятся наиболее близко к перекрестку и имеют ожидаемые пути, сходящиеся с автономным транспортным средством, для каждого дорожного сегмента, контроллер 4100 оперативного управления автономным транспортным средством может создавать два экземпляра модуля 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, для двух наиболее значимых удаленных транспортных средств, соответствующих дорожному сегменту, идущему в северном направлении, два экземпляра модуля 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, для двух наиболее значимых удаленных транспортных средств, соответствующих дорожному сегменту, идущему в южном направлении, два экземпляра модуля 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, для двух наиболее значимых удаленных транспортных средств, соответствующих дорожному сегменту, идущему в восточном направлении, и два экземпляра модуля 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, для двух удаленных транспортных средств, соответствующих дорожному сегменту, идущему в западном направлении, и контроллер 4100 оперативного управления автономным транспортным средством может исключать создание экземпляров модуля 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, для трех других удаленных транспортных средств, соответствующих дорожному сегменту, идущему в северном направлении, другого удаленного транспортного средства, соответствующего дорожному сегменту, идущему в южном направлении, и двух других удаленных транспортных средств, соответствующих дорожному сегменту, идущему в восточном направлении, Альтернативно или в дополнение, заданное пороговое значение для сценария, включающего в себя перекрестки, может представлять собой заданное количество, например, восемь, удаленных транспортных средств для каждого перекрестка, и контроллер 4100 оперативного управления автономным транспортным средством может определять восемь наиболее значимых удаленных транспортных средств для каждого перекрестка, например, восемь удаленных транспортных средств, которые в геопространственном отношении находятся наиболее близко к перекрестку и имеют ожидаемые пути, сходящиеся с автономным транспортным средством, контроллер 4100 оперативного управления автономным транспортным средством может создавать восемь экземпляров модуля 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, для восьми наиболее значимых удаленных транспортных средств, и контроллер 4100 оперативного управления автономным транспортным средством может исключать создание экземпляров модуля 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, для шести других удаленных транспортных средств.
[0116] В некоторых вариантах выполнения контроллер 4100 оперативного управления автономным транспортным средством может передавать информацию об оперативной среде или один или более ее аспектов в другой блок автономного транспортного средства, например, устройство 4200 отслеживания блокировки или один или более экземпляров модулей 4400 оценки оперативного управления для конкретных сценариев.
[0117] В некоторых вариантах выполнения контроллер 4100 оперативного управления автономным транспортным средством может сохранять информацию об оперативной среде или один или более ее аспектов, например, в памяти, например, в памяти 1340, показанной на Фиг. 1, автономного транспортного средства.
[0118] Контроллер 4100 оперативного управления автономным транспортным средством может принимать возможные действия по управлению транспортным средством от соответствующих экземпляров модулей 4400 оценки оперативного управления для конкретных сценариев. Например, возможное действие по управлению транспортным средством от первого экземпляра первого модуля 4400 оценки оперативного управления для конкретного сценария может указывать действие по управлению транспортным средством «остановиться», возможное действие по управлению транспортным средством от второго экземпляра второго модуля 4400 оценки оперативного управления для конкретного сценария может указывать действие по управлению транспортным средством «продвинуться вперед», и возможное действие по управлению транспортным средством от третьего экземпляра третьего модуля 4400 оценки оперативного управления для конкретного сценария может указывать действие по управлению транспортным средством «продолжить».
[0119] Контроллер 4100 оперативного управления автономным транспортным средством может определять, следует ли перемещаться по участку сети движения транспортных средств в соответствии с одним или более возможными действиями по управлению транспортным средством. Например, контроллер 4100 оперативного управления автономным транспортным средством может принимать множество возможных действий по управлению транспортным средством от множества экземпляров модулей 4400 оценки оперативного управления для конкретных сценариев, может определять действие по управлению транспортным средством из возможных действий по управлению транспортным средством и может выполнять перемещение по сети движения транспортных средств в соответствии с действием по управлению транспортным средством.
[0120] В некоторых вариантах выполнения контроллер 4100 оперативного управления автономным транспортным средством может определять действие по управлению транспортным средством из возможных действий по управлению транспортным средством на основе одного или более заданных показателей определения действий по управлению транспортным средством.
[0121] В некоторых вариантах выполнения заданные показатели определения действий по управлению транспортным средством могут включать в себя приоритет, вес или порядок, связанный с каждым типом действия по управлению транспортным средством, и определение действия по управлению транспортным средством из возможных действий по управлению транспортным средством может включать в себя определение действия по управлению транспортным средством с наивысшим приоритетом из возможных действий по управлению транспортным средством. Например, действие по управлению транспортным средством «остановиться» может быть связано с высоким приоритетом, действие по управлению транспортным средством «продвинуться вперед» может быть связанного со средним приоритетом, который может быть ниже, чем высокий приоритет, а действие по управлению транспортным средством «продолжить» может быть связано с низким приоритетом, который может быть ниже, чем средний приоритет. В примере возможные действия по управлению транспортным средством могут включать в себя одно или более действий по управлению транспортным средством «остановиться», и действие по управлению транспортным средством «остановиться» может быть определено в качестве действия по управлению транспортным средством. В другом примере возможные действия по управлению транспортным средством могут не включать в себя действие по управлению транспортным средством «остановиться, могут включать в себя одно или более действий по управлению транспортным средством «продвинуться вперед», и действие по управлению транспортным средством «продвинуться вперед» может быть определено в качестве действия по управлению транспортным средством. В другом примере возможные действия по управлению транспортным средством могут не включать в себя действие по управлению транспортным средством «остановиться, могут не включать в себя действие по управлению транспортным средством «продвинуться вперед», могут включать в себя одно или более действий по управлению транспортным средством «продолжить», и действие по управлению транспортным средством «продолжить» может быть определено в качестве действия по управлению транспортным средством.
[0122] В некоторых вариантах выполнения определение действия по управлению транспортным средством из возможных действий по управлению транспортным средством может включать в себя генерацию или вычисление средневзвешенного значения для каждого типа действия по управлению транспортным средством на основе заданных показателей определения действий по управлению транспортным средством, созданных сценариев, весовых коэффициентов, связанных с созданными сценариями, возможных действий по управлению транспортным средством, весовых коэффициентов, связанных с возможными действиями по управлению транспортным средством, или их сочетания.
[0123] Например, определение действия по управлению транспортным средством из возможных действий по управлению транспортным средством может включать в себя реализацию компонента машинного обучения, например, обучения с учителем проблеме классификации, и обучение компонента машинного обучения с использованием примеров, например, 1000 примеров, соответствующего оперативного сценария транспортного средства. В другом примере определение действия по управлению транспортным средством из возможных действий по управлению транспортным средством может включать в себя реализацию марковского процесса принятия решений или частично наблюдаемых марковских процессов принятия решений, которые могут описывать, как соответствующие возможные действия по управлению транспортным средством повлияют на последующие возможные действия по управлению транспортным средством, и могут включать в себя функцию вознаграждения, которая выводит положительное или отрицательное вознаграждение для соответствующего действия по управлению транспортным средством.
[0124] Контроллер 4100 оперативного управления автономным транспортным средством может не создавать экземпляр модуля 4400 оценки оперативного управления для конкретного сценария. Например, контроллер 4100 оперативного управления автономным транспортным средством может определять отдельное множество рабочих условий как указывающее отдельный оперативный сценарий транспортного средства для автономного транспортного средства, создавать экземпляр модуля 4400 оценки оперативного управления для конкретного сценария для отдельного оперативного сценария транспортного средства, отслеживать рабочие условия, впоследствии определять, что одно или более рабочих условий не действительны, или вероятность того, что они окажут влияние на работу автономного транспортного средства, ниже заданного порогового значения, и контроллер 4100 оперативного управления автономным транспортным средством может не создавать экземпляр модуля 4400 оценки оперативного управления для конкретного сценария.
[0125] Устройство 4200 отслеживания блокировки может принимать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства или ее аспект. Например, устройство 4200 отслеживания блокировки может принимать информацию об оперативной среде от контроллера 4100 оперативного управления автономным транспортным средством, от датчика автономного транспортного средства, от внешнего устройства, например, от удаленного транспортного средства или устройства инфраструктуры, или их сочетания. В некоторых вариантах выполнения устройство 4200 отслеживания блокировки может считывать информацию об оперативной среде или ее часть из памяти, например, из памяти автономного транспортного средства, например, из памяти 1340, показанной на Фиг. 1.
[0126] Хотя это явно не показано на Фиг. 4, система 4000 оперативного управления автономным транспортным средством может включать в себя модуль прогнозирования, который может генерировать и передавать информацию прогнозирования в устройство 4200 отслеживания блокировки, и устройство 4200 отслеживания блокировки может выводить информацию о вероятности доступности в одно или более устройств 4300 отслеживания оперативной среды.
[0127] Устройство 4200 отслеживания блокировки может определять соответствующую вероятность доступности или соответствующую вероятность блокировки одного или более участков сети движения транспортных средств, например, участков сети движения транспортных средств вблизи автономного транспортного средства, которые могут включать в себя участки сети движения транспортных средств, соответствующие ожидаемому пути автономного транспортного средства, например, ожидаемому пути, определенному на основе текущего маршрута автономного транспортного средства.
[0128] Вероятность доступности или соответствующая вероятность блокировки может указывать вероятность того, что автономное транспортное средство может безопасно перемещаться по участку или пространственному местоположению в пределах сети движения транспортных средств, например, без препятствий со стороны внешнего объекта, например, удаленного транспортного средства или пешехода. Например, участок сети движения транспортных средств может включать в себя препятствия, например, неподвижный объект, и вероятность доступности участка сети движения транспортных средств может быть низкой, например, 0%, что может быть выражено как высокая вероятность блокировки, например, 100%, участка сети движения транспортных средств.
[0129] Устройство 4200 отслеживания блокировки может определять соответствующую вероятность доступности каждого из множества участков сети движения транспортных средств в пределах оперативной среды автономного транспортного средства, например, в пределах 300 метров.
[0130] В некоторых вариантах выполнения устройство 4200 отслеживания блокировки может определять участок сети движения транспортных средств и соответствующую вероятность доступности на основе рабочей информации автономного транспортного средства, рабочей информации одного или более внешних объектов, информации о сети движения транспортных средств, представляющей сеть движения транспортных средств, или их сочетания. В некоторых вариантах выполнения рабочая информация автономного транспортного средства может включать в себя информацию, указывающую геопространственное местоположение автономного транспортного средства в сети движения транспортных средств, которое может представлять собой текущее местоположение или ожидаемое местоположение, например, ожидаемое местоположение, определенное на основе ожидаемого пути автономного транспортного средства. В некоторых вариантах выполнения рабочая информация внешних объектов может указывать соответствующее геопространственное местоположение одного или более внешних объектов в сети движения транспортных средств или вблизи нее, которое может представлять собой текущее местоположение или ожидаемое местоположение, например, ожидаемое местоположение, определенное на основе ожидаемого пути соответствующего внешнего объекта.
[0131] В некоторых вариантах выполнения устройство 4200 отслеживания блокировки может указывать вероятность доступности, соответствующую каждому внешнему объекту в оперативной среде автономного транспортного средства, и геопространственная область может быть связана с множеством вероятностей доступности, соответствующих множеству внешних объектов. В некоторых вариантах выполнения устройство 4200 отслеживания блокировки может указывать совокупную вероятность доступности, соответствующую каждому типу внешнего объекта в оперативной среде автономного транспортного средства, например, вероятность доступности для пешеходов и вероятность доступности для удаленных транспортных средств, и геопространственная область может быть связана с множеством вероятностей доступности, соответствующих множеству типов внешних объектов. В некоторых вариантах выполнения устройство 4200 отслеживания блокировки может указывать одну совокупную вероятность доступности для каждого геопространственного местоположения, которая может включать в себя множество временных вероятностей доступности для географического местоположения.
[0132] В некоторых вариантах выполнения устройство 4200 отслеживания блокировки может определять внешние объекты, отслеживать внешние объекты, получать информацию о местоположении, информацию о пути или то и другое для внешних объектов или сочетание этого. Например, устройство 4200 отслеживания блокировки может определять внешний объект и может определять ожидаемый путь внешнего объекта, который может указывать последовательность ожидаемых пространственных местоположений, ожидаемых временных местоположений и соответствующих вероятностей.
[0133] В некоторых вариантах выполнения устройство отслеживания блокировки может определять ожидаемый путь внешнего объекта на основе информации об оперативной среде, например, информации, указывающей текущее местоположение внешнего объекта, информации, указывающей текущую траекторию внешнего объекта, информации, указывающей тип классификации внешнего объекта, например, информации, классифицирующей внешний объект как пешехода или удаленное транспортное средство, информации о сети движения транспортных средств, например, информации, указывающей, что сеть движения транспортных средств включает в себя пешеходный переход вблизи внешнего объекта, ранее определенной или полученной информации, связанной с внешним объектом, или любого их сочетания. Например, внешний объект может быть определен как удаленное транспортное средство, и ожидаемый путь удаленного транспортного средство может быть определен на основе информации, указывающей текущее местоположение удаленного транспортного средства, информации, указывающей текущую траекторию удаленного транспортного средства, информации, указывающей текущую скорость удаленного транспортного средства, информации о сети движения транспортных средств, соответствующей удаленному транспортному средству, правовой или нормативной информации или их сочетания.
[0134] В некоторых вариантах выполнения устройство 4200 отслеживания блокировки может постоянно или периодически определять или обновлять вероятности доступности. В некоторых вариантах выполнения один или более классов или типов внешних объектов могут быть определены как блокирующие с преимуществом, и ожидаемый путь блокирующего с преимуществом внешнего объекта может перекрывать в пространстве и во времени ожидаемый путь другого блокирующего с преимуществом внешнего объекта. Например, ожидаемый путь пешехода может перекрываться с ожидаемым путем другого пешехода. В некоторых вариантах выполнения один или более классов или типов внешних объектов могут быть определены как блокирующие без преимущества, и ожидаемый путь блокирующего без преимущества внешнего объекта может быть заблокирован, например, затруднен или иным образом перекрыт, другими внешними объектами. Например, ожидаемый путь удаленного транспортного средства может быть заблокирован другим удаленным транспортным средством или пешеходом.
[0135] В некоторых вариантах выполнения устройство 4200 отслеживания блокировки может определять ожидаемые пути блокирующих с преимуществом внешних объектов, например, пешеходов, и может определять ожидаемые пути блокирующих без преимущества внешних объектов, например, удаленных транспортных средств, с учетом ожидаемых путей блокирующих с преимуществом внешних объектов. В некоторых вариантах выполнения устройство 4200 отслеживания блокировки может передавать вероятности доступности или соответствующие вероятности блокировки в контроллер 4100 оперативного управления автономным транспортным средством. Контроллер 4100 оперативного управления автономным транспортным средством может передавать вероятности доступности или соответствующие вероятности блокировки в соответствующие созданные экземпляры модулей 4400 оценки оперативного управления для конкретных сценариев.
[0136] Каждый модуль 4400 оценки оперативного управления для конкретного сценария может моделировать соответствующий отдельный оперативный сценарий транспортного средства. Система 4000 оперативного управления автономным транспортным средством может включать в себя любое количество модулей 4400 оценки оперативного управления для конкретных сценариев, каждый из которых моделирует соответствующий отдельный оперативный сценарий транспортного средства.
[0137] В некоторых вариантах выполнения моделирование отдельного оперативного сценария транспортного средства модулем 4400 оценки оперативного управления для конкретного сценария может включать в себя генерацию, сохранение или генерацию и сохранение информации о состоянии, представляющей аспекты оперативной среды автономного транспортного средства, соответствующие отдельному оперативному сценарию транспортного средства, определение потенциальных взаимодействий среди смоделированных аспектов соответствующих состояний и определение возможного действия по управлению транспортным средством, которое решает модель. В некоторых вариантах выполнения аспекты оперативной среды автономного транспортного средства, отличные от заданного множества аспектов оперативной среды автономного транспортного средства, соответствующих отдельному оперативному сценарию транспортного средства, могут быть исключены из модели.
[0138] Система 4000 оперативного управления автономным транспортным средством может быть независима от решения и может включать в себя любую модель отдельного оперативного сценария транспортного средства, например, модель с одним агентом, многоагентную модель, модель обучения или любую другую модель одного или более отдельных оперативных сценариев транспортного средства.
[0139] Один или более модулей 4400 оценки оперативного управления для конкретных сценариев могут представлять собой модель классического планирования (CP), которая может представлять собой модель с одним агентом, и которая может моделировать отдельный оперативный сценарий транспортного средства на основе заданного входного состояния, которое может указывать соответствующие не вероятностные состояния элементов оперативной среды автономного транспортного средства для отдельного оперативного сценария транспортного средства, смоделированного модулями 4400 оценки оперативного управления для конкретных сценариев. В модели классического планирования один или более аспектов, например, геопространственное местоположение, моделируемых элементов, например, внешних объектов, связанных с временным местоположением, могут отличаться от соответствующих аспектов, связанных с другим временным местоположением, например, временным местоположением сразу после него, не вероятностно, например, на заданную или фиксированную величину. Например, в первом временном местоположении удаленное транспортное средство может иметь первое геопространственное местоположение, а во втором временном местоположении сразу после него удаленное транспортное средство может иметь второе геопространственное местоположение, которое отличается от первого геопространственного местоположения на заданные геопространственные расстояния, например, заданное количество метров, вдоль ожидаемого пути удаленного транспортного средства.
[0140] Один или более модулей 4400 оценки оперативного управления для конкретных сценариев могут представлять собой отдельный процесс временного стохастического управления, например, модель марковского процесса принятия решений (MDP), которая может представлять собой модель с одним агентом, и которая может моделировать отдельный оперативный сценарий транспортного средства на основе заданного входного состояния. Изменения оперативной среды автономного транспортного средства, например, изменение местоположения внешнего объекта, могут быть смоделированы как вероятностные изменения. Модель марковского процесса принятия решений может использовать больше ресурсов обработки и может более точно моделировать отдельный оперативный сценарий транспортного средства, чем модель классического планирования (CP).
[0141] Модель марковского процесса принятия решений может моделировать отдельный оперативный сценарий транспортного средства как последовательность временных местоположений, например, текущее временное местоположение, будущие временные местоположения или то и другое, с соответствующими состояниями, например, текущим состоянием, ожидаемым будущим состоянием или тем и другим. В каждом временном местоположении модель может иметь состояние, которое может представлять собой ожидаемое состоянии, и которое может быть связано с одним или более возможными действиями по управлению транспортным средством. Модель может представлять автономное транспортное средство в качестве агента, который может переходить вдоль последовательности временных местоположений из одного состояния (текущего состояния) в другое состояние (последующее состояние) в соответствии с определенным действием для текущего состояния и вероятностью, что определенное действие приведет к переходу из текущего состояния в последующее состояние.
[0142] Модель может получать вознаграждение, которое может представлять собой положительное или отрицательное значение, соответствующее переходу из одного состояния в другое в соответствии с соответствующим действием. Модель может решать отдельный оперативный сценарий транспортного средства путем определения действий, соответствующих каждому состоянию в последовательности временных местоположений, которое максимизирует совокупное вознаграждение. Решение модели может включать в себя определение действия по управлению транспортным средством в ответ на смоделированный сценарий и информацию об оперативной среде.
[0143] Модель марковского процесса принятия решений может моделировать отдельный оперативный сценарий транспортного средства с использованием множества состояний, множества действий, множества вероятностей перехода состояний, функции вознаграждения или их сочетания. В некоторых вариантах выполнения моделирование отдельного оперативного сценария транспортного средства может включать в себя использование коэффициента дисконтирования, который может корректировать или дисконтировать выходные данные функции вознаграждения, применяемой в отношении последующих временных периодов.
[0144] Множество состояний может включать в себя текущее состояние модели марковского процесса принятия решений, одно или более возможных последующих состояний модели марковского процесса принятия решений или их сочетание. Состояние может представлять определенное состояние, которое может представлять собой ожидаемое состояние, соответствующих заданных аспектов, например, внешних объектов и устройств управления дорожным движением, оперативной среды автономного транспортного средства, которые могут вероятностно оказывать влияние на работу автономного транспортного средства в дискретном временном местоположении. Например, удаленное транспортное средство, работающее вблизи автономного транспортного средства, может оказывать влияние на работу автономного транспортного средства и может быть представлено в модели марковского процесса принятия решений, что может включать в себя представление определенного или ожидаемого геопространственного местоположения удаленного транспортного средства, определенного или ожидаемого пути, курса или пути и курса удаленного транспортного средства, определенной или ожидаемой скорости удаленного транспортного средства, определенного или ожидаемого темпа ускорения или замедления удаленного транспортного средства или их сочетания, соответствующего временному местоположению. При создании экземпляра текущее состояние модели марковского процесса принятия решений может соответствовать одновременному состоянию или условию оперативной среды. Соответствующее множество состояний может быть определено для каждого отдельного оперативного сценария транспортного средства.
[0145] Хотя может быть использовано любое количество или число состояний, количество или число состояний, включенных в модель, может быть ограничено заданным максимальным количеством состояний, например, 300 состояниями. Например, модель может включать в себя 300 наиболее вероятных состояний для соответствующего сценария.
[0146] Множество действий может включать в себя действия по управлению транспортным средством, доступные для модели марковского процесса принятия решений в каждом состоянии из множества состояний. Соответствующее множество действий может быть определено для каждого отдельного оперативного сценария транспортного средства.
[0147] Множество вероятностей перехода состояний может вероятностно представлять потенциальные или ожидаемые изменения оперативной среды автономного транспортного средства, как представлено состояниями, отвечающими на действия. Например, вероятность перехода состояния может указывать вероятность того, что оперативная среда автономного транспортного средства будет соответствовать соответствующему состоянию в соответствующем временном местоположении сразу после текущего временного местоположения, соответствующего текущему состоянию, в ответ на перемещение автономного транспортного средства по сети движения транспортных средств из текущего состояния в соответствии с соответствующим действием.
[0148] Множество вероятностей перехода состояний может быть определено на основе информации об оперативной среде. Например, информация об оперативной среде может указывать тип области, например, городской или сельский, время суток, уровень внешней освещенности, погодные условия, дорожные условия, которые могут включать в себя ожидаемые дорожные условия, например, условия в час-пик, затор дорожного движения, связанный с каким-либо событием, или поведение водителей, связанное с праздниками, состояние дороги, условия юрисдикции, например, условия страны, штата или муниципалитета, или любое другое условие или сочетание условий, которые могут оказывать влияние на работу автономного транспортного средства.
[0149] Примеры вероятностей перехода состояний, связанных с оперативным сценарием транспортного средства, включающим в себя пешеходов, могут включать в себя заданную вероятность того, что пешеход перейдет дорогу в неположенном месте, которая может быть основана на геопространственном расстоянии между пешеходом и соответствующим дорожным сегментом; заданную вероятность остановки пешехода на перекрестке; заданную вероятность того, что пешеход перейдет дорогу по пешеходному переходу; заданную вероятность того, что пешеход уступит дорогу автономному транспортному средству на пешеходном переходе; любую другую вероятность, связанную с оперативным сценарием транспортного средства, включающим в себя пешеходов.
[0150] Примеры вероятностей перехода состояний, связанных со оперативным сценарием транспортного средства, включающим в себя перекрестки, могут включать в себя заданную вероятность того, что удаленное транспортное средство достигнет перекрестка; заданную вероятность того, что удаленное транспортное средство подрежет автономное транспортное средство; заданную вероятность того, что удаленное транспортное средство пересечет перекресток сразу после и в непосредственной близости от второго удаленного транспортного средства, пересекающего перекресток, например, при отсутствии права преимущественного проезда («паровозиком»); заданную вероятность остановки удаленного транспортного средства рядом с перекрестком в соответствии с устройством управления дорожным движением, правилом дорожного движения или другим указанием права преимущественного проезда перед пересечением перекрестка; заданную вероятность того, что удаленное транспортное средство пересечет перекресток; заданную вероятность того, что удаленное транспортное средство свернет с ожидаемого пути вблизи перекрестка; заданную вероятность того, что удаленное транспортное средство нарушит ожидаемое право преимущественного проезда; любую другую вероятность, связанную со оперативным сценарием транспортного средства, включающим в себя перекрестки.
[0151] Примеры вероятностей перехода состояний, связанных с оперативным сценарием транспортного средства, включающим в себя смену полос, могут включать в себя заданную вероятность изменения скорости удаленного транспортного средства, например, заданную вероятность увеличения скорости удаленного транспортного средства за автономным транспортным средством или заданную вероятность уменьшения скорости удаленного транспортного средства перед автономным транспортным средством; заданную вероятность смены полос удаленным транспортным средством перед автономным транспортным средством; заданную вероятность того, что удаленное транспортное средство вблизи автономного транспортного средства изменит скорость, чтобы позволить автономному транспортному средству заехать на полосу движения; или любые другие вероятности, связанные с оперативным сценарием транспортного средства, включающим в себя смену полос.
[0152] Функция вознаграждения может определять соответствующее положительное или отрицательное (стоимостное) значение, которое может быть получено для каждого сочетания состояния и действия, которое может представлять ожидаемое значение автономного транспортного средства, перемещающегося по сети движения транспортных средств из соответствующего состояния в соответствии с соответствующим действием по управлению транспортным средством в последующее состояние.
[0153] Функция вознаграждения может быть определена на основе информации об оперативной среде. Например, информация об оперативной среде может указывать тип области, например, городской или сельский, время суток, уровень внешней освещенности, погодные условия, дорожные условия, которые могут включать в себя ожидаемые дорожные условия, например, условия в час-пик, затор дорожного движения, связанный с каким-либо событием, или поведение водителей, связанное с праздниками, состояние дороги, условия юрисдикции, например, условия страны, штата или муниципалитета, или любое другое условие или сочетание условий, которые могут оказывать влияние на работу автономного транспортного средства.
[0154] Один или более модулей 4400 оценки оперативного управления для конкретных сценариев могут представлять собой модель частично наблюдаемого марковского процесса принятия решений (POMDP), которая может представлять собой модель с одним агентом. Модель частично наблюдаемого марковского процесса принятия решений может быть аналогична модели марковского процесса принятия решений, за исключением того, что модель частично наблюдаемого марковского процесса принятия решений может включать в себя моделирование неопределенных состояний. Модель частично наблюдаемого марковского процесса принятия решений может включать в себя моделирование достоверности, надежности датчиков, рассеяние, шума, неопределенности, например, неопределенности датчиков, или т.п. Модель частично наблюдаемого марковского процесса принятия решений может использовать больше ресурсов обработки и может более точно моделировать отдельный оперативный сценарий транспортного средства, чем модель марковского процесса принятия решений.
[0155] Модель частично наблюдаемого марковского процесса принятия решений может моделировать отдельный оперативный сценарий транспортного средства с использованием множества состояний, множества действий, множества вероятностей перехода состояний, функции вознаграждения, множества наблюдений, множества условных вероятностей наблюдений или их сочетания. Множество состояний, множество действий, множество вероятностей перехода состояний и функция вознаграждения могут быть аналогичны описанным выше в отношении модели марковского процесса принятия решений.
[0156] Множество наблюдений может включать в себя наблюдения, соответствующие соответствующим состояниям. Наблюдение может обеспечивать информацию об атрибутах соответствующего состояния. Наблюдение может соответствовать соответствующему временному местоположению. Наблюдение может включать в себя информацию об оперативной среде, например, информацию датчика. Наблюдение может включать в себя ожидаемую или прогнозируемую информацию об оперативной среде.
[0157] Например, модель частично наблюдаемого марковского процесса принятия решений может включать в себя автономное транспортное средство в первом геопространственном местоположении и первом временном местоположении, соответствующих первому состоянию, модель может указывать, что автономное транспортное средство может определять и выполнять или пытаться выполнить действие по управлению транспортным средством для перемещения по сети движения транспортных средств из первого геопространственного местоположения во второе геопространственное местоположение во втором временном местоположении сразу после первого временного местоположения, и множество наблюдений, соответствующих второму временному местоположению, может включать в себя информацию об оперативной среде, которая может быть определена, соответствующую второму временному местоположению, например, информацию о геопространственном местоположении автономного транспортного средства, информацию о геопространственном местоположении одного или более внешних объектов, вероятности доступности, информацию об ожидаемом пути или т.п.
[0158] Множество условных вероятностей наблюдений может включать в себя вероятности выполнения соответствующих наблюдений на основе оперативной среды автономного транспортного средства. Например, автономное транспортное средство может приближаться к перекрестку, двигаясь по первой дороге, одновременно удаленное транспортное средство может приближаться к перекрестку, двигаясь по второй дороге, автономное транспортное средство может определять и оценивать информацию об оперативной среде, например, информацию датчика, соответствующую перекрестку, которая может включать в себя информацию об оперативной среде, соответствующую удаленному транспортному средству. В некоторых вариантах выполнения информация об оперативной среде может быть неточной, неполной или ошибочной. В модели марковского процесса принятия решений автономное транспортное средство может не вероятностно определять удаленное транспортное средство, что может включать в себя определение местоположения удаленного транспортного средства, ожидаемого пути удаленного транспортного средства или т.п., и определенная информация, например, определенное местоположение удаленного транспортного средства, на основе неточной информации об оперативной среде может быть неточной или ошибочной. В модели частично наблюдаемого марковского процесса принятия решений автономное транспортное средство может определять информацию, вероятностно определяющую удаленное транспортное средство, что может включать в себя вероятностное определение информации о местоположении удаленного транспортного средства, например, информации о местоположении, указывающей, что удаленное транспортное средство может находиться вблизи перекрестка. Условная вероятность наблюдения, соответствующая наблюдению или вероятностно определяющая местоположение удаленного транспортного средства, может представлять вероятность того, что определенная информация об оперативной среде точно указывает местоположение удаленного транспортного средства.
[0159] Множество условных вероятностей наблюдений может быть определено на основе информации об оперативной среде. Например, информация об оперативной среде может указывать тип области, например, городской или сельский, время суток, уровень внешней освещенности, погодные условия, дорожные условия, которые могут включать в себя ожидаемые дорожные условия, например, условия в час-пик, затор дорожного движения, связанный с каким-либо событием, или поведение водителей, связанное с праздниками, состояние дороги, условия юрисдикции, например, условия страны, штата или муниципалитета, или любое другое условие или сочетание условий, которые могут оказывать влияние на работу автономного транспортного средства.
[0160] В некоторых вариантах выполнения, например, в вариантах выполнения, реализующих модель частично наблюдаемого марковского процесса принятия решений, моделирование сценария оперативного управления автономным транспортным средством может включать в себя моделирование преград. Например, информация об оперативной среде может включать в себя информацию, соответствующую одной или более преградам, например, преградам для датчиков, в оперативной среде автономного транспортного средства, так что информация об оперативной среде может исключать информацию, представляющую один или более заслоненных внешних объектов в оперативной среде автономного транспортного средства. Например, преграда может представлять собой внешний объект, например, дорожные знаки, здание, дерево, определенный внешний объект или любое другое оперативное условие или сочетание оперативных условий, способных заслонять одно или более других оперативных условий, например, внешних объектов, от автономного транспортного средства в заданном пространственно-временном местоположении. В некоторых вариантах выполнения устройство 4300 отслеживания оперативной среды может определять преграды, может определять вероятность того, что внешний объект будет заслонен или скрыт определенной преградой, и может включать информацию о вероятности заслоненного транспортного средства в информацию об оперативной среде, выводимую в 4100 контроллер оперативного управления автономным транспортным средством и передаваемую контроллером 4100 оперативного управления автономным транспортным средством в соответствующие модули 4400 оценки оперативного управления для конкретных сценариев.
[0161] В некоторых вариантах выполнения один или более модулей 4400 оценки оперативного управления для конкретных сценариев могут представлять собой модель децентрализованного частично наблюдаемого марковского процесса принятия решений (Dec-POMDP), которая может представлять собой многоагентную модель, и которая может моделировать отдельный оперативный сценарий транспортного средства. Модель децентрализованного частично наблюдаемого марковского процесса принятия решений может быть аналогична модели частично наблюдаемого марковского процесса принятия решений за исключением того, что модель частично наблюдаемого марковского процесса принятия решений может моделировать автономное транспортное средство и подмножество, например, один, внешних объектов, а модель децентрализованного частично наблюдаемого марковского процесса принятия решений может моделировать автономное транспортное средство и множество внешних объектов.
[0162] В некоторых вариантах выполнения один или более модулей 4400 оценки оперативного управления для конкретных сценариев могут представлять собой модель частично наблюдаемой стохастической игры (POSG), которая может представлять собой многоагентную модель, и которая может моделировать отдельный оперативный сценарий транспортного средства. Модель частично наблюдаемой стохастической игры может быть аналогична модели децентрализованного частично наблюдаемого марковского процесса принятия решений за исключением того, что модель децентрализованного частично наблюдаемого марковского процесса принятия решений может включать в себя функцию вознаграждения для автономного транспортного средства, а модель частично наблюдаемой стохастической игры может включать в себя функцию вознаграждения для автономного транспортного средства и соответствующую функцию вознаграждения для каждого внешнего объекта.
[0163] В некоторых вариантах выполнения один или более модулей 4400 оценки оперативного управления для конкретных сценариев могут представлять собой модель обучения с подкреплением (RL), которая может представлять собой модель обучения, и которая может моделировать отдельный оперативный сценарий транспортного средства. Модель обучения с подкреплением может быть аналогична модели марковского процесса принятия решений или модели частично наблюдаемого марковского процесса принятия решений за исключением того, что заданные вероятности перехода состояний, вероятности наблюдений, функция вознаграждения или любое их сочетание могут быть исключены из модели.
[0164] В некоторых вариантах выполнения модель обучения с подкреплением может представлять собой модель обучения с подкреплением на основе модели, которая может включать в себя генерацию вероятностей перехода состояний, вероятностей наблюдений, функции вознаграждения или любого их сочетания на основе одного или более смоделированных или наблюдаемых событий.
[0165] В модели обучения с подкреплением модель может оценивать одно или более событий или взаимодействий, которые могут представлять собой смоделированные события, например, пересечение перекрестка, перемещение по сети движения транспортных средств вблизи пешехода или смену полос, и может генерировать или преобразовывать соответствующую модель или ее решение в ответ на соответствующее событие. Например, автономное транспортное средство может пересекать перекресток с использованием модели обучения с подкреплением. Модель обучения с подкреплением может указывать возможное действие по управлению транспортным средством для пересечения перекрестка. Автономное транспортное средство может пересекать перекресток с использованием возможного действия по управлению транспортным средством в качестве действия по управлению транспортным средством для временного местоположения. Автономное транспортное средство может определять результат пересечения перекрестка с использованием возможного действия по управлению транспортным средством и может обновлять модель на основе результата.
[0166] В примере в первом временном местоположении удаленное транспортное средство может быть неподвижным на перекрестке с запретом права преимущественного проезда, например, в виде красного света, модель обучения с подкреплением может указывать возможное действие по управлению транспортным средством «продолжить» для первого временного местоположения, модель обучения с подкреплением может включать в себя низкую вероятность определения информации об оперативной среде в последующем временном местоположении после перемещения по сети движения транспортных средств в соответствии с определенным возможным действием по управлению транспортным средством, указывающей, что геопространственное местоположение удаленного транспортного средства, соответствующее первому временному местоположению, отличается от геопространственного местоположения удаленного транспортного средства, соответствующего второму временному местоположению, например, 0/100. Автономное транспортное средство может перемещаться по сети движения транспортных средств в соответствии с определенным возможным действием по управлению транспортным средством, может впоследствии определять, что геопространственное местоположение удаленного транспортного средства, соответствующее первому временному местоположению, отличается от геопространственного местоположения удаленного транспортного средства, соответствующего второму временному местоположению, и может преобразовывать или обновлять вероятность для соответствующего включения определенного события, например, 1/101.
[0167] В другом примере модель обучения с подкреплением может указывать заданное положительное ожидаемое вознаграждение для перемещения по сети движения транспортных средств из первого временного местоположения во второе временное местоположение в соответствии с определенным действием по управлению транспортным средством и в соответствии с определенной информацией об оперативной среде, которая может быть вероятностной. Автономное транспортное средство может перемещаться по сети движения транспортных средств в соответствии с определенным действием по управлению транспортным средством. Автономное транспортное средство может определять на основе впоследствии определенной информации об оперативной среде, которая может быть вероятностной, что информация об оперативной среде, соответствующая второму временному местоположению, по существу аналогична определенной информации об оперативной среде, соответствующей первому временному местоположению, которая может указывать стоимость, например, во времени, перемещения по сети движения транспортных средств в соответствии с определенным действием по управлению транспортным средством, и модель обучения с подкреплением может уменьшать соответствующее ожидаемое вознаграждение.
[0168] Система 4000 оперативного управления автономным транспортным средством может включать в себя любое количество или сочетание типов моделей. Например, модуль 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, модуль 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, и модуль 4430 оценки оперативного управления для конкретного сценария, включающего в себя смену полос, могут представлять собой модели частично наблюдаемого марковского процесса принятия решений. В другом примере модуль 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может представлять собой модель марковского процесса принятия решений, а модуль 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, и модуль 4430 оценки оперативного управления для конкретного сценария, включающего в себя смену полос, могут представлять собой модели частично наблюдаемого марковского процесса принятия решений.
[0169] Контроллер 4100 оперативного управления автономным транспортным средством может создавать любое количество экземпляров модулей 4400 оценки оперативного управления для конкретных сценариев на основе информации об оперативной среде.
[0170] Например, информация об оперативной среде может включать в себя информацию, представляющую пешехода, приближающегося к перекрестку вдоль ожидаемого пути автономного транспортного средства, и контроллер 4100 оперативного управления автономным транспортным средством может определять оперативный сценарий транспортного средства, включающий в себя пешеходов, оперативный сценарий транспортного средства, включающий в себя перекрестки, или тот и другой. Контроллер 4100 оперативного управления автономным транспортным средством может создавать экземпляр модуля 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, экземпляр модуля 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, или тот и другой.
[0171] В другом примере информация об оперативной среде может включать в себя информацию, представляющую более одного пешехода на перекрестке или вблизи него на ожидаемом пути автономного транспортного средства. Контроллер 4100 оперативного управления автономным транспортным средством может определять оперативные сценарии, включающие в себя пешеходов, соответствующие одному или более пешеходам, оперативный сценарий транспортного средства, включающий в себя перекрестки, или их сочетание. Контроллер 4100 оперативного управления автономным транспортным средством может создавать экземпляры модуля 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, для некоторых или всех оперативных сценариев, включающих в себя пешеходов, экземпляр модуля 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, или их сочетание.
[0172] Модуль 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может представлять собой модель сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, перемещающееся по участку сети движения транспортных средств вблизи пешехода (сценарий, включающий в себя пешеходов). Модуль 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может принимать информацию об оперативной среде, например, информацию о пешеходах, сгенерированную устройством 4310 отслеживания оперативной среды для отслеживания пешеходов, от контроллера 4100 оперативного управления автономным транспортным средством.
[0173] Модуль 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может моделировать поведение пешехода, соответствующее пешеходу, идущему по участку сети движения транспортных средств или иным образом вероятностно оказывающему влияние на работу автономного транспортного средства. В некоторых вариантах выполнения модуль 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может моделировать пешехода как действующего в соответствии с правилами модели пешехода, выражающими вероятное поведение пешехода. Например, правила модели пешехода могут выражать правила сети движения транспортных средств, правила сети движения пешеходов, прогнозируемое поведение пешехода, социальные нормы или их сочетание. Например, правила модели пешехода могут указывать вероятность того, что пешеход может перемещаться по участку сети движения транспортных средств по пешеходному переходу или другой заданной области доступа пешеходов. В некоторых вариантах выполнения модуль 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может моделировать пешехода как действующего независимо от заданных правил сети движения транспортных средств, правил сети движения пешеходов, или тех и других, например, переходящего дорогу в неположенном месте.
[0174] Модуль 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может выводить возможное действие по управлению транспортным средством, например, возможное действие по управлению транспортным средством «остановиться, возможное действие по управлению транспортным средством «продвинуться вперед» или возможное действие по управлению транспортным средством «продолжить». В некоторых вариантах выполнения возможное действие по управлению транспортным средством может представлять собой составное действие по управлению транспортным средством. Например, возможное действие по управлению транспортным средством может включать в себя действие по управлению транспортным средством «продвинуться вперед, которое может представлять собой действие по управлению транспортным средством с косвенным сигналом для пешехода, и может включать в себя действие по управлению транспортным средством с прямым сигналом для пешехода, например, мигание фар автономного транспортного средства или звуковой сигнал клаксона автономного транспортного средства. Пример сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, перемещающееся по участку сети движения транспортных средств вблизи пешехода, показан на Фиг. 7.
[0175] Модуль 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, может представлять собой модель сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, перемещающееся по участку сети движения транспортных средств, который включает в себя перекресток. Модуль 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, может моделировать поведение удаленных транспортных средств, пересекающих перекресток в сети движения транспортных средств или иным образом вероятностно оказывающих влияние на работу автономного транспортного средства, пересекающего перекресток. Перекресток может включать в себя любой участок сети движения транспортных средств, на котором транспортное средство может переместиться с одной дороги на другую.
[0176] В некоторых вариантах выполнения моделирование сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, перемещающееся по участку сети движения транспортных средств, который включает в себя перекресток, может включать в себя определение порядка преимущественного проезда транспортных средств для пересечения перекрестка, например, путем согласования с удаленными транспортными средствами.
[0177] В некоторых вариантах выполнения моделирование сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, перемещающееся по участку сети движения транспортных средств, который включает в себя перекресток, может включать в себя моделирование одного или более устройств управления дорожным движением, например, знака «СТОП», знака «уступи дорогу», светофора или любого другого устройства управления дорожным движением, правила дорожного движения, сигнала или их сочетания.
[0178] В некоторых вариантах выполнения моделирование сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, перемещающееся по участку сети движения транспортных средств, который включает в себя перекресток, может включать в себя вывод возможного действия по управлению транспортным средством «продвинуться вперед», прием информации, например, информации датчика, в ответ на выполнение автономным транспортным средством возможного действия по управлению транспортным средством «продвинуться вперед» и вывод следующего возможного действия по управлению транспортным средством на основе принятой информации.
[0179] В некоторых вариантах выполнения моделирование сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, перемещающееся по участку сети движения транспортных средств, который включает в себя перекресток, может включать в себя моделирование вероятности того, что удаленное транспортное средство может пересечь перекресток в соответствии с правилами сети движения транспортных средств. В некоторых вариантах выполнения моделирование сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, перемещающееся по участку сети движения транспортных средств, который включает в себя перекресток, может включать в себя моделирование вероятности того, что удаленное транспортное средство может пересечь перекресток независимо от одного или более правил сети движения транспортных средств, например, следуя очень близко за другим удаленным транспортным средством, имеющим право преимущественного проезда (следуя «паровозиком»).
[0180] Модуль 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, может выводить возможное действие по управлению транспортным средством, например, возможное действие по управлению транспортным средством «остановиться, возможное действие по управлению транспортным средством «продвинуться вперед» или возможное действие по управлению транспортным средством «продолжить». В некоторых вариантах выполнения возможное действие по управлению транспортным средством может представлять собой составное действие по управлению транспортным средством. Например, возможное действие по управлению транспортным средством может включать в себя действие по управлению транспортным средством «продолжить» и сигнальное действие по управлению транспортным средством, например, мигание сигнала поворота автономного транспортного средства. Пример сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, пересекающее перекресток, показан на Фиг. 8.
[0181] Модуль 4430 оценки оперативного управления для конкретного сценария, включающего в себя смену полос, может представлять собой модель сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, перемещающееся по участку сети движения транспортных средств путем выполнения операции смены полос. Модуль 4430 оценки оперативного управления для конкретного сценария, включающего в себя смену полос, может моделировать поведение удаленных транспортных средств, вероятностно оказывающих влияние на работу автономного транспортного средства, выполняющего смену полос.
[0182] В некоторых вариантах выполнения моделирование сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, перемещающееся по участку сети движения транспортных средств путем выполнения смены полос, может включать в себя вывод возможного действия по управлению транспортным средством «поддерживать», действия по управлению транспортным средством «продолжить, действия по управлению транспортным средством «ускориться, действия по управлению транспортным средством «замедлиться» или их сочетания. Пример сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство, выполняющее смену полос, показан на Фиг. 9.
[0183] В некоторых вариантах выполнения один или более из контроллера 4100 оперативного управления автономным транспортным средством, устройства 4200 отслеживания блокировки, устройств 4300 отслеживания оперативной среды или модулей 4400 оценки оперативного управления для конкретных сценариев может работать непрерывно или периодически, например, с частотой десять герц (10 Гц). Например, контроллер 4100 оперативного управления автономным транспортным средством может определять действие по управлению транспортным средством множество раз, например, десять раз, в секунду. Рабочая частота каждого компонента системы 4000 оперативного управления автономным транспортным средством может быть синхронизированной или несинхронизированной, и скорость работы одного или более из контроллера 4100 оперативного управления автономным транспортным средством, устройства 4200 отслеживания блокировки, устройств 4300 отслеживания оперативной среды или модулей 4400 оценки оперативного управления для конкретного сценария могу быть независимыми от скорости работы другого одного или более из контроллера 4100 оперативного управления автономным транспортным средством, устройства 4200 отслеживания блокировки, устройств 4300 отслеживания оперативной среды или модулей 4400 оценки оперативного управления для конкретных сценариев.
[0184] В некоторых вариантах выполнения возможные действия по управлению транспортным средством, выводимые экземплярами модулей 4400 оценки оперативного управления для конкретного сценария, могут включать в себя или могут быть связаны с информацией об оперативной среде, например, с информацией о состоянии, временной информацией или той и другой. Например, возможное действие по управлению транспортным средством может быть связано с информацией об оперативной среде, представляющей возможное будущее состояние, будущее временное местоположение или то и другое. В некоторых вариантах выполнения контроллер 4100 оперативного управления автономным транспортным средством может определять устаревшие возможные действия по управлению транспортным средством, представляющие прошлые временные местоположения, состояния, имеющие вероятность возникновения ниже минимального порога, или не выбранные возможные действия по управлению транспортным средством, и может удалять, исключать или игнорировать устаревшие возможные действия по управлению транспортным средством.
[0185] Фиг. 5 представляет собой блок-схему примера оперативного управления 5000 автономным транспортным средством в соответствии с вариантами выполнения настоящего изобретения. Оперативное управление 5000 автономным транспортным средством может быть реализовано в автономном транспортном средстве, например, транспортном средстве 1000, показанном на Фиг. 1, одном из транспортных средств 2100/2110, показанных на Фиг. 2, полуавтономном транспортном средстве или любом другом транспортном средстве с автономным управлением. Например, автономное транспортное средство может реализовывать систему оперативного управления автономным транспортным средством, например, систему 4000 оперативного управления автономным транспортным средством, показанную на Фиг. 4.
[0186] Оперативное управление 5000 автономным транспортным средством может включать в себя реализацию или работу одного или более модулей или компонентов, что может включать в себя работу контроллера или исполнителя 5100 оперативного управления автономным транспортным средством, например, контроллера 4100 оперативного управления автономным транспортным средством, показанного на Фиг. 4; устройства 5200 отслеживания блокировки, например, устройства 4200 отслеживания блокировки, показанного на Фиг. 4; нуля или более экземпляров 5300 модулей оценки оперативного управления для конкретных сценариев (SSOCEMI), например, экземпляров модулей 4400 оценки оперативного управления для конкретных сценариев, показанных на Фиг. 4; или их сочетания.
[0187] Хотя это отдельно не показано на Фиг. 5, в некоторых вариантах выполнения исполнитель 5100 может отслеживать оперативную среду автономного транспортного средства или ее определенные аспекты. В некоторых вариантах выполнения отслеживание оперативной среды автономного транспортного средства может включать в себя определение и отслеживание внешних объектов на этапе 5110, определение отдельных оперативных сценариев транспортного средства на этапе 5120 или их сочетание.
[0188] Исполнитель 5100 может определять оперативную среду автономного транспортного средства или ее аспект на этапе 5110. Определение оперативной среды может включать в себя определение информации об оперативной среде, представляющей оперативную среду или один или более ее аспектов. В некоторых вариантах выполнения информация об оперативной среде может включать в себя информацию об автономном транспортном средстве, информацию, представляющую сеть движения транспортных средств или один или более ее аспектов вблизи автономного транспортного средства, информацию, представляющую внешние объекты или один или более их аспектов в пределах оперативной среды автономного транспортного средства, или их сочетание.
[0189] В некоторых вариантах выполнения исполнитель 5100 может определять информацию об оперативной среде на этапе 5110 на основе информации датчика, информации о сети движения транспортных средств, ранее определенной информации об оперативной среде или любой другой информации или сочетания информации, описывающей аспект или аспекты оперативной среды. В некоторых вариантах выполнения информация датчика может представлять собой обработанную информацию датчика, например, обработанную информацию датчика от блока обработки информации датчика автономного транспортного средства, который может принимать информацию датчика от датчика автономного транспортного средства и может генерировать обработанную информацию датчика на основе информации датчика.
[0190] В некоторых вариантах выполнения определение информации об оперативной среде на этапе 5110 может включать в себя прием информации, указывающей один или более аспектов оперативной среды, от датчика автономного транспортного средства, например, датчика 1360, показанного на Фиг. 1, или бортовых датчиков 2105 транспортного средства, показанных на Фиг. 2. Например, датчик может обнаруживать внешний объект, например, пешехода, транспортное средство или любой другой объект, внешний по отношению к автономному транспортному средству, в пределах заданного расстояния, например, 300 метров, от автономного транспортного средства, и датчик может передавать информацию датчика, указывающую или представляющую внешний объект, в исполнитель 5100. В некоторых вариантах выполнения датчик или другой блок автономного транспортного средства может сохранять информацию датчика в памяти, например, в памяти 1340, показанной на Фиг. 1, автономного транспортного средства, и контроллер 5100 оперативного управления автономным транспортным средством считывает информацию датчика из памяти.
[0191] В некоторых вариантах выполнения внешний объект, указанный информацией датчика, может быть неопределенным, и контроллер 5100 оперативного управления автономным транспортным средством может определять информацию об объекте, например, тип объекта, на основе информации датчика, другой информации, например, информации от другого датчика, информации, соответствующей ранее определенному объекту, или их сочетания. В некоторых вариантах выполнения датчик или другой блок автономного транспортного средства может определять информацию об объекте и может передавать определенную информацию об объекте в контроллер 5100 оперативного управления автономным транспортным средством.
[0192] В некоторых вариантах выполнения информация датчика может указывать состояние дороги, особенности дороги или их сочетание. Например, информация датчика может указывать состояние дороги, например, мокрую дорогу, обледенелую дорогу или любое другое состояние или состояния дороги. В другом примере информация датчика может указывать дорожную разметку, например, разделитель полосы, аспект геометрии дороги или любую другую особенность или особенности дороги.
[0193] В некоторых вариантах выполнения определение информации об оперативной среде на этапе 5110 может включать в себя определение информации, указывающей один или более аспектов оперативной среды на основе информации о сети движения транспортных средств. Например, контроллер 5100 оперативного управления автономным транспортным средством может считывать или иным образом принимать информацию о сети движения транспортных средств, указывающую, что автономное транспортное средство приближается к перекрестку, или иным образом описывающую геометрию или конфигурацию сети движения транспортных средств вблизи автономного транспортного средства, например, в пределах 300 метров от автономного транспортного средства.
[0194] В некоторых вариантах выполнения определение информации об оперативной среде на этапе 5110 может включать в себя определение информации, указывающей один или более аспектов оперативной среды, от удаленного транспортного средства или другого удаленного устройства, внешнего по отношению к автономному транспортному средству. Например, автономное транспортное средство может принимать от удаленного транспортного средства по беспроводному каналу электронной связи сообщение удаленного транспортного средства, включающее в себя информацию об удаленном транспортном средстве, указывающую информацию о геопространственном состоянии удаленного транспортного средства для удаленного транспортного средства, информацию о кинематическом состоянии удаленного транспортного средства для удаленного транспортного средства или то и другое.
[0195] В некоторых вариантах выполнения исполнитель 5100 может включать в себя один или более экземпляров модулей отслеживания для конкретных сценариев. Например, исполнитель 5100 может включать в себя экземпляр модуля отслеживания для конкретного сценария для отслеживания пешеходов, экземпляр модуля отслеживания для конкретного сценария для отслеживания перекрестков, экземпляр модуля отслеживания для конкретного сценария для отслеживания смены полос или их сочетание. Каждый экземпляр модуля отслеживания для конкретного сценария может принимать или иным образом получать доступ к информации об оперативной среде, соответствующей соответствующему сценарию, и может передавать, сохранять или иным образом выводить или обеспечивать для доступ для исполнителя 5100, устройства 5200 отслеживания блокировки, экземпляра 5300 модуля оценки оперативного управления для конкретного сценария или их сочетания, предназначенного для отслеживания информации, соответствующей соответствующему сценарию.
[0196] В некоторых вариантах выполнения исполнитель 5100 может передавать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства, в устройство 5200 отслеживания блокировки на этапе 5112. Альтернативно или в дополнение, устройство 5200 отслеживания блокировки может принимать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства, от другого компонента автономного транспортного средства, например, от датчика автономного транспортного средства, устройство 5200 отслеживания блокировки может считывать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства, из памяти автономного транспортного средства, или то и другое.
[0197] Исполнитель 5100 может обнаруживать или определять один или более отдельных оперативных сценариев транспортного средства на этапе 5120. В некоторых вариантах выполнения исполнитель 5100 может определять отдельные оперативные сценарии транспортного средства на этапе 5120 на основе одного или более аспектов оперативной среды, представленных информацией об оперативной среде, определенной на этапе 5110.
[0198] В некоторых вариантах выполнения исполнитель 5100 может определять множество отдельных оперативных сценариев транспортного средства, которые могут представлять собой аспекты составного оперативного сценария транспортного средства, на этапе 5120. Например, информация об оперативной среде может включать в себя информацию, представляющую пешехода, приближающегося к перекрестку вдоль ожидаемого пути автономного транспортного средства, и исполнитель 5100 может определять оперативный сценарий транспортного средства, включающий в себя пешеходов, оперативный сценарий транспортного средства, включающий в себя перекрестки, или тот и другой на этапе 5120. В другом примере оперативная среда, представленная информацией об оперативной среде, может включать в себя множество внешних объектов, и исполнитель 5100 может определять отдельный оперативный сценарий транспортного средства, соответствующий каждому внешнему объекту, на этапе 5120.
[0199] Исполнитель 5100 может создавать экземпляр 5300 модуля оценки оперативного управления для конкретного сценария на основе одного или более аспектов оперативной среды, представленных информацией об оперативной среде, на этапе 5130. Например, исполнитель 5100 может создавать экземпляр 5300 модуля оценки оперативного управления для конкретного сценария на этапе 5130 в ответ на определение отдельного оперативного сценария транспортного средства на этапе 5120.
[0200] Хотя на Фиг. 5 показан один экземпляр 5300 модуля оценки оперативного управления для конкретного сценария, исполнитель 5100 может создавать множество экземпляров 5300 модулей оценки оперативного управления для конкретных сценариев на основе одного или более аспектов оперативной среды, представленных информацией об оперативной среде, определенной на этапе 5110, причем каждый экземпляр 5300 модуля оценки оперативного управления для конкретного сценария соответствует соответствующему отдельному оперативному сценарию транспортного средства, определенному на этапе 5120, или сочетанию отдельного внешнего объекта, определенного на этапе 5110, и соответствующего отдельного оперативного сценария транспортного средства, определенного на этапе 5120.
[0201] Например, оперативная среда, представленная информацией об оперативной среде, определенной на этапе 5110, может включать в себя множество внешних объектов, исполнитель 5100 может определять множество отдельных оперативных сценариев транспортного средства, которые могут представлять собой аспекты составного оперативного сценария транспортного средства, на этапе 5120 на основе оперативной среды, представленной информацией об оперативной среде, определенной на этапе 5110, и исполнитель 5100 может создавать экземпляр 5300 модуля оценки оперативного управления для конкретного сценария, соответствующий каждому отдельному сочетанию отдельного оперативного сценария транспортного средства и внешнего объекта.
[0202] В некоторых вариантах выполнения модуль оценки оперативного управления для конкретного сценария, соответствующий отдельному оперативному сценарию транспортного средства, определенному на 5120, может быть недоступен, и создание экземпляра 5300 модуля оценки оперативного управления для конкретного сценария на этапе 5130, может включать в себя генерацию, решение и создание экземпляра 5300 модуля оценки оперативного управления для конкретного сценария, соответствующего отдельному оперативному сценарию транспортного средства, определенному на этапе 5120. Например, отдельный оперативный сценарий транспортного средства, определенный на этапе 5120, может указывать перекресток, включающий в себя две полосы, имеющие знаки регулировки дорожного движения «СТОП», например, знаки «СТОП», и две полосы, имеющие знаки регулировки дорожного движения «уступи дорогу», например, знаки «уступи дорогу», доступные модули оценки оперативного управления для конкретных сценариев могут включать в себя модуль оценки оперативного управления для конкретного сценария частично наблюдаемого марковского процесса принятия решений, который отличается от отдельного оперативного сценария транспортного средства, определенного на этапе 5120, например, модуль оценки оперативного управления для конкретного сценария частично наблюдаемого марковского процесса принятия решений, который моделирует сценарий, включающий в себя перекрестки, который включает в себя четыре полосы, имеющие знаки регулировки дорожного движения «СТОП», и исполнитель 5100 может генерировать, решать и создавать экземпляр 5300 модуля оценки оперативного управления для конкретного сценария марковского процесса принятия решений, моделирующий перекресток, включающий в себя две полосы, имеющие знаки регулировки дорожного движения «СТОП», и две полосы, имеющие знаки регулировки дорожного движения «уступи дорогу», на этапе 5130.
[0203] В некоторых вариантах выполнения создание экземпляра модуля оценки оперативного управления для конкретного сценария на этапе 5130 может включать в себя определение вероятности пространственно-временного схождения на основе информации об автономном транспортном средстве, информации об оперативной среде или их сочетания. Определение вероятности пространственно-временного схождения может включать в себя определение ожидаемого пути автономного транспортного средства, определение ожидаемого пути удаленного транспортного средства и определение вероятности схождения автономного транспортного средства и удаленного транспортного средства, указывающей вероятность того, что автономное транспортное средство и удаленное транспортное средство могут пересечься или столкнуться, на основе информации об ожидаемых путях. Экземпляр модуля оценки оперативного управления для конкретного сценария может быть создан в ответ на определение, что вероятность схождения превышает заданное пороговое значение, например, заданную максимально допустимую вероятность схождения.
[0204] В некоторых вариантах выполнения создание экземпляров 5300 модулей оценки оперативного управления для конкретных сценариев на этапе 5130 может включать в себя передачу информации об оперативной среде, представляющей оперативную среду автономного транспортного средства, в экземпляры 5300 модулей оценки оперативного управления для конкретных сценариев, как обозначено ссылочной позицией 5132.
[0205] Экземпляр 5300 модуля оценки оперативного управления для конкретного сценария может принимать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства или один или более ее аспектов, на этапе 5310. Например, экземпляр 5300 модуля оценки оперативного управления для конкретного сценария может принимать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства или один или более ее аспектов, переданную исполнителем 5100 на этапе 5132. Альтернативно или в дополнение, экземпляры 5300 модулей оценки оперативного управления для конкретных сценариев могут принимать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства, от другого компонента автономного транспортного средства, например, от датчика автономного транспортного средства или от устройства 5200 отслеживания блокировки, экземпляры 5300 модулей оценки оперативного управления для конкретных сценариев могут считывать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства, из памяти автономного транспортного средства, или то и другое.
[0206] Устройство 5200 отслеживания блокировки может принимать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства или ее аспект, на этапе 5210. Например, устройство 5200 отслеживания блокировки может принимать информацию об оперативной среде или ее аспект, переданную исполнителем 5100 на этапе 5112. В некоторых вариантах выполнения устройство 5200 отслеживания блокировки может принимать информацию об оперативной среде или ее аспект от датчика автономного транспортного средства, от внешнего устройства, например, от удаленного транспортного средства или устройства инфраструктуры, или их сочетания. В некоторых вариантах выполнения устройство 5200 отслеживания блокировки может считывать информацию об оперативной среде или ее аспект из памяти, например, из памяти автономного транспортного средства.
[0207] Устройство 5200 отслеживания блокировки может определять соответствующую вероятность доступности (POA) или соответствующую вероятность блокировки на этапе 5220 для одного или более участков сети движения транспортных средств, например, участков сети движения транспортных средств вблизи автономного транспортного средства, которые могут включать в себя участки сети движения транспортных средств, соответствующие ожидаемому пути автономного транспортного средства, например, ожидаемому пути, определенному на основе текущего маршрута автономного транспортного средства.
[0208] В некоторых вариантах выполнения определение соответствующей вероятности доступности на этапе 5220 может включать в себя определение внешних объектов, отслеживание внешних объектов, получение информации о местоположении внешних объектов, получение информации о пути внешних объектов или их сочетание. Например, устройство 5200 отслеживания блокировки может определять внешний объект и может определять ожидаемый путь внешнего объекта, который может указывать последовательность ожидаемых пространственных местоположений, ожидаемых временных местоположений и соответствующих вероятностей.
[0209] В некоторых вариантах выполнения устройство 5200 отслеживания блокировки может определять ожидаемый путь внешнего объекта на основе информации об оперативной среде, например, информации, указывающей текущее местоположение внешнего объекта, информации, указывающей текущую траекторию внешнего объекта, информации, указывающей тип классификации внешнего объекта, например, информации, классифицирующей внешний объект как пешехода или удаленное транспортное средство, информации о сети движения транспортных средств, например, информации, указывающей, что сеть движения транспортных средств включает в себя пешеходный переход вблизи внешнего объекта, ранее определенной или полученной информации, связанной с внешним объектом, или любого их сочетания. Например, внешний объект может быть определен как удаленное транспортное средство, и ожидаемый путь удаленного транспортного средство может быть определен на основе информации, указывающей текущее местоположение удаленного транспортного средства, информации, указывающей текущую траекторию удаленного транспортного средства, информации, указывающей текущую скорость удаленного транспортного средства, информации о сети движения транспортных средств, соответствующей удаленному транспортному средству, правовой или нормативной информации или их сочетания.
[0210] В некоторых вариантах выполнения устройство 5200 отслеживания блокировки может передавать вероятности доступности, определенные на этапе 5220, в экземпляры 5300 модулей оценки оперативного управления для конкретных сценариев на этапе 5222. Альтернативно или в дополнение, устройство 5200 отслеживания блокировки может сохранять вероятности доступности, определенные на этапе 5220, в памяти автономного транспортного средства, или то и другое. Хотя это явно не показано на Фиг. 5, устройство 5200 отслеживания блокировки может передавать вероятности доступности, определенные на этапе 5220, в исполнитель 5100 на этапе 5212, в дополнение или в качестве альтернативы передаче вероятностей доступности в экземпляры 5300 модулей оценки оперативного управления для конкретных сценариев.
[0211] Экземпляр 5300 модуля оценки оперативного управления для конкретного сценария может принимать вероятности доступности на этапе 5320. Например, экземпляр 5300 модуля оценки оперативного управления для конкретного сценария может принимать вероятности доступности, переданные устройством 5200 отслеживания блокировки на этапе 5222. В некоторых вариантах выполнения экземпляр 5300 модуля оценки оперативного управления для конкретного сценария может считывать вероятности доступности из памяти, например, из памяти автономного транспортного средства.
[0212] Экземпляр 5300 модуля оценки оперативного управления для конкретного сценария может решать модель соответствующего отдельного оперативного сценария транспортного средства на этапе 5330. В некоторых вариантах выполнения экземпляр 5300 модуля оценки оперативного управления для конкретного сценария может генерировать или определять возможное действие по управлению транспортным средством на этапе 5330.
[0213] В некоторых вариантах выполнения экземпляр 5300 модуля оценки оперативного управления для конкретного сценария может передавать возможное действие по управлению транспортным средством, определенное на этапе 5330, в исполнитель 5100 на этапе 5332. Альтернативно или в дополнение, экземпляр 5300 модуля оценки оперативного управления для конкретного сценария может сохранять возможное действие по управлению транспортным средством, определенное на этапе 5330, в памяти автономного транспортного средства.
[0214] Исполнитель 5100 может принимать возможное действие по управлению транспортным средством на этапе 5140. Например, исполнитель 5100 может принимать возможное действие по управлению транспортным средством от экземпляра 5300 модуля оценки оперативного управления для конкретного сценария на этапе 5140. Альтернативно или в дополнение, исполнитель 5100 может считывать возможное действие по управлению транспортным средством из памяти автономного транспортного средства.
[0215] Исполнитель 5100 может одобрять возможное действие по управлению транспортным средством или иным образом определять возможное действие по управлению транспортным средством в качестве действия по управлению транспортным средством для управления автономным транспортным средством, перемещающимся по сети движения транспортных средств, на этапе 5150. Например, исполнитель 5100 может определять один отдельный оперативный сценарий транспортного средства на этапе 5120, создавать один экземпляр 5300 модуля оценки оперативного управления для конкретного сценария на этапе 5130, принимать одно возможное действие по управлению транспортным средством на этапе 5140 и одобрять возможное действие по управлению транспортным средством на этапе 5150.
[0216] В некоторых вариантах выполнения исполнитель 5100 может определять множество отдельных оперативных сценариев транспортного средства на этапе 5120, создавать множество экземпляров 5300 модулей оценки оперативного управления для конкретных сценариев на этапе 5130, принимать множество возможных действий по управлению транспортным средством на этапе 5140 и одобрять одно или более возможных действий по управлению транспортным средством на этапе 5150. В дополнение или в качестве альтернативы, оперативное управление 5000 автономным транспортным средством может включать в себя работу одного или более ранее созданных экземпляров модулей оценки оперативного управления для конкретных сценариев (явно не показаны), и исполнитель может принимать возможные действия по управлению транспортным средством на этапе 5140 от экземпляра модуля оценки оперативного управления для конкретного сценария, созданного на этапе 5130, и от одного или более ранее созданных экземпляров модулей оценки оперативного управления для конкретных сценариев, и одобрять одно или более возможных действий по управлению транспортным средством на этапе 5150.
[0217] Одобрение возможного действия по управлению транспортным средством на этапе 5150 может включать в себя определение, следует ли перемещаться по участку сети движения транспортных средств в соответствии с возможным действием по управлению транспортным средством.
[0218] Исполнитель 5100 может управлять автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку на этапе 5160 в соответствии с действием по управлению транспортным средством, определенным на этапе 5150.
[0219] Исполнитель 5100 может определять оперативную среду автономного транспортного средства или ее аспект на этапе 5170. Определение оперативной среды автономного транспортного средства или ее аспекта на этапе 5170 может быть аналогично определению оперативной среды автономного транспортного средства на этапе 5110 и может включать в себя обновление ранее определенной информации об оперативной среде.
[0220] Исполнитель 5100 может определять, решен или не решен отдельный оперативный сценарий транспортного средства, на этапе 5180. Например, исполнитель 5100 может непрерывно или периодически принимать информацию об оперативной среде, как описано выше. Исполнитель 5100 может оценивать информацию об оперативной среде для определения, решен ли отдельный оперативный сценарий транспортного средства.
[0221] В некоторых вариантах выполнения исполнитель 5100 может определять, что отдельный оперативный сценарий транспортного средства, соответствующий экземпляру 5300 модуля оценки оперативного управления для конкретного сценария, не решен на этапе 5180, исполнитель 5100 может передавать информацию об оперативной среде, определенную на этапе 5170, в экземпляры 5300 модулей оценки оперативного управления для конкретных сценариев, как обозначено ссылочной позицией 5185, и исключение создания экземпляра 5300 модуля оценки оперативного управления для конкретного сценария на этапе 5180 может быть опущено или может отличаться.
[0222] В некоторых вариантах выполнения исполнитель 5100 может определять, что отдельный оперативный сценарий транспортного средства решен, на этапе 5180 и может не создавать на этапе 5190 экземпляры 5300 модулей оценки оперативного управления для конкретных сценариев, соответствующих отдельному оперативному сценарию транспортного средства, определенному как решенный на этапе 5180. Например, исполнитель 5100 может определять отдельное множество рабочих условий, образующих отдельный оперативный сценарий транспортного средства для автономного транспортного средства, на этапе 5120, может определять, что одно или более рабочих условий не действительны, или вероятность того, что они окажут влияние на работу автономного транспортного средства, ниже заданного порогового значения, на этапе 5180 и может не создавать соответствующий экземпляр 5300 модуля оценки оперативного управления для конкретного сценария.
[0223] Хотя это явно не показано на Фиг. 5, исполнитель 5100 может непрерывно или периодически повторять определение или обновление информации об оперативной среде на этапе 5170, определение, решен ли отдельный оперативный сценарий транспортного средства, на этапе 5180 и в ответ на определение, что отдельный оперативный сценарий транспортного средства не решен, на этапе 5180 передачу информацию об оперативной среде, определенную на этапе 5170, в экземпляры 5300 модулей оценки оперативного управления для конкретных сценариев, как обозначено ссылочной позицией 5185, до тех пор, пока определение, решен ли отдельный оперативный сценарий транспортного средства, на этапе 5180 не будет включать в себя определение, что отдельный оперативный сценарий транспортного средства решен.
[0224] Фиг. 6 представляет собой схематическое изображение примера сцены 6000 блокировки в соответствии с вариантами выполнения настоящего изобретения. Оперативное управление автономным транспортным средством, например, оперативное управление 5000 автономным транспортным средством, показанное на Фиг. 5, может включать в себя автономное транспортное средство 6100, например, транспортное средство 1000, показанное на Фиг. 1, одно из транспортных средств 2100/2110, показанных на Фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство с автономным управлением, осуществляющее работу системы оперативного управления автономным транспортным средством, например, системы 4000 оперативного управления автономным транспортным средством, показанной на Фиг. 4, включающей в себя устройство отслеживания блокировки, например, устройство 4200 отслеживания блокировки, показанное на Фиг. 4, или устройство 5200 отслеживания блокировки, показанное на Фиг. 5, для определения вероятности доступности или соответствующей вероятности блокировки участка или области сети движения транспортных средств, соответствующей сцене 6000 блокировки. Устройство отслеживания блокировки может работать, и вероятности доступности могут быть определены в сочетании или независимо от заданных сценариев оперативного управления автономным транспортным средством.
[0225] Участок сети движения транспортных средств, соответствующий сцене 6000 блокировки, показанной на Фиг. 6, включает в себя автономное транспортное средство 6100, перемещающееся по первой дороге 6200 и приближающееся к перекрестку 6210 со второй дорогой 6220. Перекресток 6210 включает в себя пешеходный переход 6300. К пешеходному переходу 6300 приближается пешеход 6400. Удаленное транспортное средство 6500 перемещается по второй дороге 6220, приближаясь к перекрестку 6210. Ожидаемый путь 6110 автономного транспортного средства 6100 указывает, что автономное транспортное средство 6100 может пересечь перекресток 6210 путем поворота направо с первой дороги 6200 на вторую дорогу 6220. Альтернативный ожидаемый путь 6120 автономного транспортного средства 6100, показанный пунктирной линией, указывает, что автономное транспортное средство 6100 может пересечь перекресток 6210 путем поворота налево с первой дороги 6200 на вторую дорогу 6220.
[0226] Устройство отслеживания блокировки может определять ожидаемый путь 6410 пешехода 6400. Например, информация датчика может указывать, что пешеход 6400 имеет скорость, превышающую пороговое значение, и траекторию, пересекающую пешеходный переход 6300, информация о сети движения транспортных средств может указывать, что перекресток включает в себя меры нормативного регулирования, так что при пересечении перекрестка в соответствии с мерами нормативного регулирования транспортные средства уступают дорогу пешеходам на пешеходном переходе, или перекресток 6210 может включать в себя одно или более устройств управления дорожным движением (не показаны), указывающих разрешающий сигнал для пешехода 6400, и ожидаемый путь 6410 пешехода 6400 может быть определен как включающий в себя пешехода 6400, перемещающегося по пешеходному переходу 6300, с высокой вероятностью, например, 1,0 или 100%.
[0227] Устройство отслеживания блокировки может определять ожидаемые пути 6510, 6520 удаленного транспортного средства 6500. Например, информация датчика может указывать, что удаленное транспортное средство 6500 приближается к перекрестку 6210, информация о сети движения транспортных средств может указывать, что удаленное транспортное средство 6500 может проехать прямо через перекресток 6210 или может повернуть направо на перекрестке 6210 на первую дорогу 6200, и устройство отслеживания блокировки может определять первый ожидаемый путь 6510 прямо через перекресток и второй ожидаемый путь 6520 с поворотом направо на перекрестке для удаленного транспортного средства 6500.
[0228] В некоторых вариантах выполнения устройство отслеживания блокировки может определять вероятность каждого из ожидаемых путей 6510, 6520, например, на основе рабочей информации удаленного транспортного средства 6500. Например, рабочая информация удаленного транспортного средства 6500 может указывать скорость удаленного транспортного средства, которая превышает максимальное пороговое значение для поворота, и первый ожидаемый путь 6510 может быть определен с высокой вероятностью, например, 0,9 или 90%, а второй ожидаемый путь 6520 может быть определен с низкой вероятностью, например, 0,1 или 10%.
[0229] В другом примере рабочая информация удаленного транспортного средства 6500 может указывать скорость удаленного транспортного средства в пределах максимального порогового значения для поворота, и первый ожидаемый путь 6510 может быть определен с низкой вероятностью, например, 0,1 или 10%, а второй ожидаемый путь 6520 может быть определен с высокой вероятностью, например, 0,9 или 90%.
[0230] Устройство отслеживания блокировки может определять низкую вероятность доступности участка или области второй дороги 6220 вблизи, например, в пределах нескольких, например, трех, футов, от ожидаемого пути 6410 пешехода, который может соответствовать пешеходному переходу 6300, например, 0%, указывая, что соответствующий участок второй дороги 6220 заблокирован на период времени, соответствующий пересечению пешеходом 6400 пешеходного перехода 6300.
[0231] Устройство отслеживания блокировки может определять, что первый ожидаемый путь 6510 удаленного транспортного средства 6500 и ожидаемый путь автономного транспортного средства 6100 заблокированы пешеходом одновременно с периодом времени, соответствующим пересечению пешеходом 6400 пешеходного перехода 6300.
[0232] Фиг. 7 представляет собой схематическое изображение примера сцены 7000 с пешеходами, которая включает в себя сценарии, включающие в себя пешеходов, в соответствии с вариантами выполнения настоящего изобретения. Оперативное управление автономным транспортным средством, например, оперативное управление 5000 автономным транспортным средством, показанное на Фиг. 5, может включать в себя автономное транспортное средство 7100, например, транспортное средство 1000, показанное на Фиг. 1, одно из транспортных средств 2100/2110, показанных на Фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство с автономным управлением, осуществляющее работу системы оперативного управления автономным транспортным средством, например, системы 4000 оперативного управления автономным транспортным средством, показанной на Фиг. 4, включающей в себя экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, который может представлять собой экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, например, модуля 4410 оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, показанного на Фиг. 4, который может представлять собой модель сценария оперативного управления автономным транспортным средством, включающего в себя автономное транспортное средство 7100, перемещающееся по участку сети движения транспортных средств вблизи пешехода. Для простоты и ясности участок сети движения транспортных средств, соответствующий сцене 7000 с пешеходами, показанной на Фиг. 7, ориентирован на север сверху и на восток справа.
[0233] Участок сети движения транспортных средств, соответствующий сцене 7000 с пешеходами, показанной на Фиг. 7, включает в себя автономное транспортное средство 7100, перемещающееся на север по дорожному сегменту по полосе первой дороги 7200 и приближающееся к перекрестку 7210 со второй дорогой 7220. Перекресток 7210 включает в себя первый пешеходный переход 7300 поперек первой дороги 7200 и второй пешеходный переход 7310 поперек второй дороги 7220. Первый пешеход 7400 находится на первой дороге 7200, двигаясь на восток, в области, не предназначенной для доступа пешеходов (переходит дорогу в неположенном месте). Второй пешеход 7410 находится вблизи первого пешеходного перехода 7300 и движется с запада на северо-запад. Третий пешеход 7420 приближается к первому пешеходному переходу 7300 с запада. Четвертый пешеход 7430 приближается ко второму пешеходному переходу 7310 с севера.
[0234] Система оперативного управления автономным транспортным средством может включать в себя контроллер оперативного управления автономным транспортным средством, например, контроллер 4100 оперативного управления автономным транспортным средством, показанный на Фиг. 4, или исполнитель 5100, показанный на Фиг. 5, и устройство отслеживания блокировки, например, устройство 4200 отслеживания блокировки, показанное на Фиг. 4, или устройство 5200 отслеживания блокировки, показанное на Фиг. 5. Автономное транспортное средство 7100 может включать в себя один или более датчиков, одно или более устройств отслеживания оперативной среды или их сочетание.
[0235] В некоторых вариантах выполнения система оперативного управления автономным транспортным средством может работать непрерывно или периодически, например, в каждом временном местоположении в последовательности временных местоположений. Для простоты и ясности геопространственное местоположение автономного транспортного средства 7100, первого пешехода 7400, второго пешехода 7410, третьего пешехода 7420 и четвертого пешехода 7430 показано в соответствии с первым, последовательно самым ранним временным местоположением из последовательности временных местоположений. Хотя для простоты и ясности описание приведено со ссылкой на последовательность временных местоположений, каждый блок системы оперативного управления автономным транспортным средством может работать с любой частотой, работа соответствующих блоков может быть синхронизирована или не синхронизирована, и операции могут выполняться одновременно с одним или более участками одного или более временных местоположений. Для простоты и ясности соответствующие описания одного или более временных местоположений, например, временных местоположений между временными местоположениями, описанными в настоящем документе, могут быть исключены из настоящего изобретения.
[0236] В одном или более временных местоположениях, например, в каждом временном местоположении, датчики автономного транспортного средства 7100 могут определять информацию, соответствующую оперативной среде автономного транспортного средства 7100, например, информацию, соответствующую одному или более пешеходам 7400, 7410, 7420, 7430.
[0237] В одном или более временных местоположениях, например, в каждом временном местоположении, система оперативного управления автономным транспортным средством может определять ожидаемый путь 7500 автономного транспортного средства 7100, маршрут 7510 автономного транспортного средства 7100 или то и другое. В соответствии с первым временным местоположением ожидаемый путь 7500 автономного транспортного средства 7100 указывает, что автономное транспортное средство 7100 может пересечь перекресток 7210, двигаясь на север по первой дороге 7200. Маршрут 7510 автономного транспортного средства 7100 указывает, что автономное транспортное средство 7100 может повернуть направо на вторую дорогу 7220.
[0238] В одном или более временных местоположениях, например, в каждом временном местоположении, устройства отслеживания оперативной среды автономного транспортного средства 7100 могут определять или генерировать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства 7100 или ее аспект, например, в ответ на прием информации датчика, соответствующей пешеходам 7400, 7410, 7420, что может включать в себя связывание информации датчика с пешеходами 7400, 7410, 7420, 7430, и могут выводить информацию об оперативной среде, которая может включать в себя информацию, представляющую пешеходов 7400, 7410, 7420, 7430, в контроллер оперативного управления автономным транспортным средством.
[0239] В одном или более временных местоположениях, например, в каждом временном местоположении, устройство отслеживания блокировки может генерировать информацию о вероятностях доступности, указывающую соответствующие вероятности доступности одной или более областей или участков сети движения транспортных средств. Например, в соответствии с первым временным местоположением устройство отслеживания блокировки может определять ожидаемый путь 7520 первого пешехода 7400 и вероятность доступности области или участка сети движения транспортных средств вблизи точки схождения между ожидаемым путем 7520 первого пешехода 7400 и ожидаемым путем 7500 или маршрутом 7510 автономного транспортного средства 7100.
[0240] В другом примере устройство отслеживания блокировки может определять ожидаемый путь 7530 второго пешехода 7410, ожидаемый путь 7540 третьего пешехода 7420 и вероятность доступности области или участка сети движения транспортных средств вблизи первого пешеходного перехода 7300. Определение вероятности доступности области или участка сети движения транспортных средств вблизи первого пешеходного перехода 7300 может включать в себя определение второго пешехода 7410 и третьего пешехода 7420 как блокирующие с преимуществом внешние объекты и определение, что соответствующие ожидаемые пути 7530, 7540 могут пересекаться в пространстве и во времени.
[0241] В другом примере устройство отслеживания блокировки может определять множество ожидаемых путей для одного или более внешних объектов. Например, устройство отслеживания блокировки может определять первый ожидаемый путь 7530 второго пешехода 7410 с высокой вероятностью и может определять второй ожидаемый путь 7532 второго пешехода 7410 с низкой вероятностью.
[0242] В другом примере устройство отслеживания блокировки может определять ожидаемый путь 7550 четвертого пешехода 7430 и вероятность доступности области или участка сети движения транспортных средств вблизи второго пешеходного перехода 7310.
[0243] В некоторых вариантах выполнения генерация информации о вероятностях доступности может включать в себя генерацию вероятностей доступности соответствующей области или участка сети движения транспортных средств, соответствующего множеству временных местоположений из последовательности временных местоположений. Устройство отслеживания блокировки может выводить информацию о вероятностях доступности или обеспечивать доступ для контроллера оперативного управления автономным транспортным средством.
[0244] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может генерировать информацию об оперативной среде или обновлять ранее сгенерированную информацию об оперативной среде, что может включать в себя прием информации об оперативной среде или ее части.
[0245] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может обнаруживать или определять один или более отдельных оперативных сценариев транспортного средства, например, на основе оперативной среды, представленной информацией об оперативной среде, которая может включать в себя информацию об оперативной среде, выведенную устройствами отслеживания оперативной среды, информацию о вероятностях доступности, выведенную устройством отслеживания блокировки, или их сочетание. Например, в соответствии с первым временным местоположением контроллер оперативного управления автономным транспортным средством может обнаруживать или определять один или более из первого сценария, включающего в себя пешеходов, который включает в себя первого пешехода 7400, второго сценария, включающего в себя пешеходов, который включает в себя второго пешехода 7410, третьего сценария, включающего в себя пешеходов, который включает в себя третьего пешехода 7420, и четвертого сценария, включающего в себя пешеходов, который включает в себя четвертого пешехода 7430.
[0246] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может определять один или более ранее не определенных оперативных сценариев транспортного средства. Например, в соответствии с первым временным местоположением контроллер оперативного управления автономным транспортным средством может определять первый оперативный сценарий транспортного средства, а в соответствии со вторым временным местоположением из последовательности временных местоположений, например, временным местоположением, следующим за первым временным местоположением, контроллер оперативного управления автономным транспортным средством может определять второй оперативный сценарий транспортного средства.
[0247] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может создавать один или более экземпляров модулей оценки оперативного управления для конкретных сценариев, включающих в себя пешеходов, в ответ на обнаружение или определение одного или более из первого сценария, включающего в себя пешеходов, который включает в себя первого пешехода 7400, второго сценария, включающего в себя пешеходов, который включает в себя второго пешехода 7410, третьего сценария, включающего в себя пешеходов, который включает в себя третьего пешехода 7420, или четвертого сценария, включающего в себя пешеходов, который включает в себя четвертого пешехода 7430.
[0248] Например, в соответствии с первым временным местоположением контроллер оперативного управления автономным транспортным средством может обнаруживать первый сценарий, включающий в себя пешеходов, который включает в себя первого пешехода 7400, может определять, что доступен модуль оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, соответствующий первому сценарию, включающему в себя пешеходов, и может создавать первый экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, в ответ на обнаружение первого сценария, включающего в себя пешеходов, который включает в себя первого пешехода 7400.
[0249] В другом примере контроллер оперативного управления автономным транспортным средством может обнаруживать первый сценарий, включающий в себя пешеходов, который включает в себя первого пешехода 7400, определять, что модуль оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, соответствующий первому сценарию, включающему в себя пешеходов, не доступен, генерировать и решать модуль оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, соответствующий первому сценарию, включающему в себя пешеходов, и создавать экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, соответствующего первому сценарию, включающему в себя пешеходов, в ответ на обнаружение первого сценария, включающего в себя пешеходов, который включает в себя первого пешехода 7400.
[0250] В некоторых вариантах выполнения контроллер оперативного управления автономным транспортным средством может по существу одновременно обнаруживать или определять один или более сценариев, включающих в себя пешеходов. Например, контроллер оперативного управления автономным транспортным средством может по существу одновременно обнаруживать или определять второй сценарий, включающий в себя пешеходов, который включает в себя второго пешехода 7410, и третий сценарий, включающий в себя пешеходов, который включает в себя третьего пешехода 7420.
[0251] В некоторых вариантах выполнения контроллер оперативного управления автономным транспортным средством может по существу одновременно создавать два или более соответствующих экземпляров соответствующих модулей оценки оперативного управления для конкретных сценариев, включающих в себя пешеходов. Например, контроллер оперативного управления автономным транспортным средством может по существу одновременно обнаруживать или определять второй сценарий, включающий в себя пешеходов, который включает в себя второго пешехода 7410, и третий сценарий, включающий в себя пешеходов, который включает в себя третьего пешехода 7420, и может создавать экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, соответствующего второму сценарию, включающему в себя пешеходов, по существу одновременно с созданием экземпляра модуля оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, соответствующего третьему сценарию, включающему в себя пешеходов.
[0252] В другом примере контроллер оперативного управления автономным транспортным средством может по существу одновременно обнаруживать или определять второй сценарий, включающий в себя пешеходов, который включает в себя первый ожидаемый путь 7530 второго пешехода 7410, и пятый сценарий, включающий в себя пешеходов, который включает в себя второй ожидаемый путь 7532 второго пешехода 7410, и может создавать экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, соответствующего второму сценарию, включающему в себя пешеходов, по существу одновременно с созданием экземпляра модуля оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, соответствующего пятому сценарию, включающему в себя пешеходов.
[0253] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может передавать или иным образом делать доступной информацию об оперативной среде, например, новую или обновленную информацию об оперативной среде, для ранее созданных или работающих экземпляров модулей оценки оперативного управления для конкретных сценариев.
[0254] Создание или обновление экземпляра модуля оценки оперативного управления для конкретного сценария может включать в себя обеспечение информации об оперативной среде или ее части, например, информации датчика или вероятностей доступности, для соответствующих экземпляров модулей оценки оперативного управления для конкретных сценариев, например, путем передачи информации об оперативной среде или ее части в соответствующие экземпляры модулей оценки оперативного управления для конкретных сценариев или сохранения информации об оперативной среде или ее части для доступа соответствующих экземпляров модулей оценки оперативного управления для конкретных сценариев.
[0255] В одном или более временных местоположениях, например, в каждом временном местоположении, соответствующие экземпляры модулей оценки оперативного управления для конкретных сценариев, включающих в себя пешеходов, могут принимать или иным образом получать доступ к информации об оперативной среде, соответствующей соответствующим сценариям оперативного управления автономным транспортным средством. Например, в соответствии с первым временным местоположением первый экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может принимать информацию об оперативной среде, соответствующую первому сценарию, включающему в себя пешеходов, которая может включать в себя информацию о вероятностях доступности области или участка сети движения транспортных средств вблизи точки схождения между ожидаемым путем 7520 первого пешехода 7400 и ожидаемым путем 7500 или маршрутом 7510 автономного транспортного средства 7100.
[0256] Модуль оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может моделировать сценарий, включающий в себя пешеходов, как включающий в себя состояния, представляющие пространственно-временные местоположения автономного транспортного средства 7100, пространственно-временные местоположения соответствующего пешехода 7400, 7410, 7420, 7430 и соответствующие вероятности блокировки. Модуль оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может моделировать сценарий, включающий в себя пешеходов, как включающий в себя действия, например, «остановиться» (или «ожидать»), «продвинуться вперед» и «продолжить». Модуль оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может моделировать сценарий, включающий в себя пешеходов, как включающий в себя вероятности перехода состояний, представляющие вероятности того, что соответствующий пешеход окажется на ожидаемом пути автономного транспортного средства, например, при движении по ожидаемому пути, связанному с соответствующим пешеходом. Вероятности перехода состояний могут быть определены на основе информации об оперативной среде. Модуль оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может моделировать сценарий, включающий в себя пешеходов, как включающий в себя отрицательные вознаграждения за нарушение правил дорожного движения и включающий в себя положительное вознаграждение за завершение сценария, включающего в себя пешеходов.
[0257] В одном или более временных местоположениях, например, в каждом временном местоположении, каждый созданный экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя пешеходов, может генерировать соответствующее возможное действие по управлению транспортным средством, например, «остановиться», «продвинуться вперед» или «продолжить», на основе соответствующего смоделированного сценария и соответствующей информации об оперативной среде и может выводить соответствующее возможное действие по управлению транспортным средством в контроллер оперативного управления автономным транспортным средством, например, путем передачи соответствующего возможного действия по управлению транспортным средством в контроллер оперативного управления автономным транспортным средством или сохранения соответствующего возможного действия по управлению транспортным средством для доступа контроллера оперативного управления автономным транспортным средством.
[0258] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может принимать возможные действия по управлению транспортным средством от соответствующих созданных экземпляров модулей оценки оперативного управления для конкретных сценариев, включающих в себя пешеходов, и может определять действие по управлению транспортным средством на основе принятых возможных действий по управлению транспортным средством для управления автономным транспортным средством 7100 в соответствующем временном местоположении и может управлять автономным транспортным средством для перемещения по сети движения транспортных средств или ее участку в соответствии с определенным действием по управлению транспортным средством.
[0259] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может определять, действительны ли один или более определенных оперативных сценариев транспортного средства, и в ответ на определение, что оперативные сценарии транспортного средства не действительны, может не создавать соответствующие экземпляры модулей оценки оперативного управления для конкретных сценариев, включающих в себя пешеходов.
[0260] Фиг. 8 представляет собой схематическое изображение примера сцены 8000 с перекрестком, которая включает в себя сценарии, включающие в себя перекрестки, в соответствии с вариантами выполнения настоящего изобретения. Оперативное управление автономным транспортным средством, например, оперативное управление 5000 автономным транспортным средством, показанное на Фиг. 5, может включать в себя автономное транспортное средство 8100, например, транспортное средство 1000, показанное на Фиг. 1, одно из транспортных средств 2100/2110, показанных на Фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство с автономным управлением, осуществляющее работу системы оперативного управления автономным транспортным средством, например, системы 4000 оперативного управления автономным транспортным средством, показанной на Фиг. 4, включающей в себя экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, который может представлять собой экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, например, модуля 4420 оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, показанного на Фиг. 4, который может представлять собой модель сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство 8100, перемещающееся по участку сети движения транспортных средств, включающему в себя перекресток. Для простоты и ясности участок сети движения транспортных средств, соответствующий сцене 8000 с перекрестком, показанной на Фиг. 8, ориентирован на север сверху и на восток справа.
[0261] Участок сети движения транспортных средств, соответствующий сцене 8000 с перекрестком, показанной на Фиг. 8, включает в себя автономное транспортное средство 8100, перемещающееся по первой дороге 8200 с запада на восток и приближающееся к перекрестку 8210 со второй дорогой 8220. Ожидаемый путь 8110 автономного транспортного средства 8100 указывает, что автономное транспортное средство 8100 может проехать прямо через перекресток 8210. Первый альтернативный ожидаемый путь 8120 автономного транспортного средства 8100, показанный пунктирной линией, указывает, что автономное транспортное средство 8100 может пересечь перекресток 8210 путем поворота направо с первой дороги 8200 на вторую дорогу 8220. Второй альтернативный ожидаемый путь 8130 автономного транспортного средства 8100, показанный пунктирной линией, указывает, что автономное транспортное средство 8100 может пересечь перекресток 8210 путем поворота налево с первой дороги 8200 на вторую дорогу 8220.
[0262] Первое удаленное транспортное средство 8300 движется на юг по первой полосе, идущей в южном направлении, второй дороги 8220, приближаясь к перекрестку 8210. Второе удаленное транспортное средство 8310 движется на север по первой полосе, идущей в северном направлении, второй дороги 8220, приближаясь к перекрестку 8210. Третье удаленное транспортное средство 8320 движется на север по второй полосе, идущей в северном направлении, второй дороги 8220, приближаясь к перекрестку 8210. Четвертое удаленное транспортное средство 8330 движется на север по первой полосе, идущей в северном направлении, второй дороги 8220, приближаясь к перекрестку 8210.
[0263] Система оперативного управления автономным транспортным средством может включать в себя контроллер оперативного управления автономным транспортным средством, например, контроллер 4100 оперативного управления автономным транспортным средством, показанный на Фиг. 4, или исполнитель 5100, показанный на Фиг. 5, и устройство отслеживания блокировки, например, устройство 4200 отслеживания блокировки, показанное на Фиг. 4, или устройство 5200 отслеживания блокировки, показанное на Фиг. 5. Автономное транспортное средство 8100 может включать в себя один или более датчиков, одно или более устройств отслеживания оперативной среды или их сочетание.
[0264] В некоторых вариантах выполнения система оперативного управления автономным транспортным средством может работать непрерывно или периодически, например, в каждом временном местоположении в последовательности временных местоположений. Для простоты и ясности геопространственное местоположение автономного транспортного средства 8100, первого удаленного транспортного средства 8300, второго удаленного транспортного средства 8310, третьего удаленного транспортного средства 8320 и четвертого удаленного транспортного средства 8330 показано в соответствии с первым, последовательно самым ранним временным местоположением из последовательности временных местоположений. Хотя для простоты и ясности описание приведено со ссылкой на последовательность временных местоположений, каждый блок системы оперативного управления автономным транспортным средством может работать с любой частотой, работа соответствующих блоков может быть синхронизирована или не синхронизирована, и операции могут выполняться одновременно с одним или более участками одного или более временных местоположений. Для простоты и ясности соответствующие описания одного или более временных местоположений, например, временных местоположений между временными местоположениями, описанными в настоящем документе, могут быть исключены из настоящего изобретения.
[0265] В одном или более временных местоположениях, например, в каждом временном местоположении, датчики автономного транспортного средства 8100 могут определять информацию, соответствующую оперативной среде автономного транспортного средства 8100, например, информацию, соответствующую одному или более удаленным транспортным средствам 8300, 8310, 8320, 8330.
[0266] В одном или более временных местоположениях, например, в каждом временном местоположении, система оперативного управления автономным транспортным средством может определять ожидаемый путь 8110, 8120, 8130 автономного транспортного средства 8100, маршрут (не показан) автономного транспортного средства 8100 или то и другое.
[0267] В одном или более временных местоположениях, например, в каждом временном местоположении, устройства отслеживания оперативной среды автономного транспортного средства 8100 могут определять или генерировать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства 8100 или ее аспект, например, в ответ на прием информации датчика, соответствующей удаленным транспортным средствам 8300, 8310, 8320, 8330, что может включать в себя связывание информации датчика с удаленными транспортными средствами 8300, 8310, 8320, 8330, и могут выводить информацию об оперативной среде, которая может включать в себя информацию, представляющую удаленные транспортные средства 8300, 8310, 8320, 8330, в контроллер оперативного управления автономным транспортным средством.
[0268] В одном или более временных местоположениях, например, в каждом временном местоположении, устройство отслеживания блокировки может генерировать информацию о вероятностях доступности, указывающую соответствующие вероятности доступности одной или более областей или участков сети движения транспортных средств. Например, устройство отслеживания блокировки может определять один или более вероятных ожидаемых путей 8400, 8402 первого удаленного транспортного средства 8300, один или более вероятных ожидаемых путей 8410, 8412 второго удаленного транспортного средства 8310, один или более вероятных ожидаемых путей 8420, 8422 третьего удаленного транспортного средства 8320 и ожидаемый путь 8430 четвертого удаленного транспортного средства 8330. Устройство отслеживания блокировки может генерировать информацию о вероятностях доступности, указывающую соответствующие вероятности доступности одной или более областей или участков сети движения транспортных средств, соответствующих одному или более из ожидаемого пути 8110 автономного транспортного средства 8100, первого альтернативного ожидаемого пути 8120 автономного транспортного средства 8100 или второго альтернативного ожидаемого пути 8130 автономного транспортного средства 8100.
[0269] В некоторых вариантах выполнения генерация информации о вероятностях доступности может включать в себя генерацию вероятностей доступности соответствующей области или участка сети движения транспортных средств, соответствующего множеству временных местоположений из последовательности временных местоположений. Устройство отслеживания блокировки может выводить информацию о вероятностях доступности или обеспечивать доступ для контроллера оперативного управления автономным транспортным средством.
[0270] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может генерировать информацию об оперативной среде или обновлять ранее сгенерированную информацию об оперативной среде, что может включать в себя прием информации об оперативной среде или ее части.
[0271] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может обнаруживать или определять один или более отдельных оперативных сценариев транспортного средства, например, на основе оперативной среды, представленной информацией об оперативной среде, которая может включать в себя информацию об оперативной среде, выведенную устройствами отслеживания оперативной среды, информацию о вероятностях доступности, выведенную устройством отслеживания блокировки, или их сочетание. Например, контроллер оперативного управления автономным транспортным средством может обнаруживать или определять один или более из первого сценария, включающего в себя перекрестки, который включает в себя первое удаленное транспортное средство 8300, второго сценария, включающего в себя перекрестки, который включает в себя второе удаленное транспортное средство 8310, третьего сценария, включающего в себя перекрестки, который включает в себя третье удаленное транспортное средство 8320, и четвертого сценария, включающего в себя перекрестки, который включает в себя четвертое удаленное транспортное средство 8330.
[0272] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может определять один или более ранее не определенных оперативных сценариев транспортного средства. Например, в соответствии с первым временным местоположением контроллер оперативного управления автономным транспортным средством может обнаруживать первый сценарий, включающий в себя перекрестки, а в соответствии со вторым временным местоположением из последовательности временных местоположений, например, временным местоположением, следующим за первым временным местоположением, контроллер оперативного управления автономным транспортным средством может обнаруживать второй сценарий, включающий в себя перекрестки.
[0273] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может создавать один или более экземпляров модулей оценки оперативного управления для конкретных сценариев, включающих в себя перекрестки, в ответ на обнаружение или определение одного или более из первого сценария, включающего в себя перекрестки, второго сценария, включающего в себя перекрестки, третьего сценария, включающего в себя перекрестки, или четвертого сценария, включающего в себя перекрестки.
[0274] В некоторых вариантах выполнения контроллер оперативного управления автономным транспортным средством может по существу одновременно обнаруживать или определять один или более сценариев, включающих в себя перекрестки. Например, контроллер оперативного управления автономным транспортным средством может по существу одновременно обнаруживать или определять второй сценарий, включающий в себя перекрестки, и третий сценарий, включающий в себя перекрестки.
[0275] В некоторых вариантах выполнения контроллер оперативного управления автономным транспортным средством может по существу одновременно создавать два или более соответствующих экземпляров соответствующих модулей оценки оперативного управления для конкретных сценариев, включающих в себя перекрестки. Например, контроллер оперативного управления автономным транспортным средством может по существу одновременно обнаруживать или определять второй сценарий, включающий в себя перекрестки, и третий сценарий, включающий в себя перекрестки, и может создавать экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, соответствующего второму сценарию, включающему в себя перекрестки, по существу одновременно с созданием экземпляра модуля оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, соответствующего третьему сценарию, включающему в себя перекрестки.
[0276] В другом примере контроллер оперативного управления автономным транспортным средством может по существу одновременно обнаруживать или определять второй сценарий, включающий в себя перекрестки, который включает в себя первый ожидаемый путь 8400 первого удаленного транспортного средства 8300, и пятый сценарий, включающий в себя перекрестки, который включает в себя второй ожидаемый путь 8402 первого удаленного транспортного средства 8300, и может создавать экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, соответствующего второму сценарию, включающему в себя перекрестки, по существу одновременно с созданием экземпляра модуля оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, соответствующего пятому сценарию, включающему в себя перекрестки.
[0277] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может передавать или иным образом делать доступной информацию об оперативной среде, например, новую или обновленную информацию об оперативной среде, для ранее созданных или работающих экземпляров модулей оценки оперативного управления для конкретных сценариев.
[0278] Создание или обновление экземпляра модуля оценки оперативного управления для конкретного сценария может включать в себя обеспечение информации об оперативной среде или ее части, например, информации датчика или вероятностей доступности, для соответствующих экземпляров модулей оценки оперативного управления для конкретных сценариев, например, путем передачи информации об оперативной среде или ее части в соответствующие экземпляры модулей оценки оперативного управления для конкретных сценариев или сохранения информации об оперативной среде или ее части для доступа соответствующих экземпляров модулей оценки оперативного управления для конкретных сценариев.
[0279] В некоторых вариантах выполнения информация об оперативной среде может указывать рабочую информацию автономного транспортного средства 8100, например, информацию о геопространственном местоположении, информацию о скорости, информацию об ускорении, информацию о нерешенности, информацию о приоритете или их сочетание, и рабочую информацию одного или более удаленных транспортных средств 8300, 8310, 8320, 8330, например, информацию о геопространственном местоположении, информацию о скорости, информацию об ускорении, информацию о нерешенности, информацию о приоритете или их сочетание. Информация о нерешенности может указывать период времени, который соответствует соответствующему транспортному средству и соответствующему географическому местоположению, например, период времени, в который соответствующее транспортное средство было неподвижным на перекрестке. Информация о приоритете может указывать право преимущественного проезда, которое соответствует соответствующему транспортному средству относительно других транспортных средств в сцене 8000 с перекрестком.
[0280] Модуль оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, может моделировать сценарий, включающий в себя перекрестки, как включающий в себя состояния, представляющие пространственно-временные местоположения автономного транспортного средства 8100, пространственно-временные местоположения соответствующих удаленных транспортных средств 8300, 8310, 8320, 8330, информацию о нерешенности, информацию о приоритете и соответствующие вероятности блокировки. Модуль оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, может моделировать сценарий, включающий в себя перекрестки, как включающий в себя действия, например, «остановиться» (или «ожидать»), «продвинуться вперед» и «продолжить». Модуль оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, может моделировать сценарий, включающий в себя перекрестки, как включающий в себя вероятности перехода состояний, представляющие вероятности того, что соответствующий перекресток окажется на ожидаемом пути автономного транспортного средства, например, при движении по ожидаемому пути, связанному с соответствующим перекрестком. Вероятности перехода состояний могут быть определены на основе информации об оперативной среде. Модуль оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, может моделировать сценарий, включающий в себя перекрестки, как включающий в себя отрицательные вознаграждения за нарушение правил дорожного движения и включающий в себя положительное вознаграждение за завершение сценария, включающего в себя перекрестки.
[0281] В одном или более временных местоположениях, например, в каждом временном местоположении, соответствующие экземпляры модулей оценки оперативного управления для конкретных сценариев, включающих в себя перекрестки, могут принимать или иным образом получать доступ к информации об оперативной среде, соответствующей соответствующим сценариям, включающим в себя перекрестки. Например, в соответствии с первым временным местоположением первый экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, может принимать информацию об оперативной среде, соответствующую первому сценарию, включающему в себя перекрестки, которая может включать в себя информацию о вероятностях доступности области или участка сети движения транспортных средств вблизи точки схождения между первым ожидаемым путем 8400 первого удаленного транспортного средства 8300 и ожидаемым путем 8110 автономного транспортного средства 8100.
[0282] В одном или более временных местоположениях, например, в каждом временном местоположении, каждый созданный экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя перекрестки, может генерировать соответствующее возможное действие по управлению транспортным средством, например, «остановиться», «продвинуться вперед» или «продолжить», на основе соответствующего смоделированного сценария и соответствующей информации об оперативной среде и может выводить соответствующее возможное действие по управлению транспортным средством в контроллер оперативного управления автономным транспортным средством, например, путем передачи соответствующего возможного действия по управлению транспортным средством в контроллер оперативного управления автономным транспортным средством или сохранения соответствующего возможного действия по управлению транспортным средством для доступа контроллера оперативного управления автономным транспортным средством.
[0283] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может принимать возможные действия по управлению транспортным средством от соответствующих созданных экземпляров модулей оценки оперативного управления для конкретных сценариев, включающих в себя перекрестки, и может определять действие по управлению транспортным средством на основе принятых возможных действий по управлению транспортным средством для управления автономным транспортным средством 8100 в соответствующем временном местоположении и может управлять автономным транспортным средством 8100 для перемещения по сети движения транспортных средств или ее участку в соответствии с определенным действием по управлению транспортным средством.
[0284] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может определять, действительны ли один или более определенных сценариев, включающих в себя перекрестки, и в ответ на определение, что сценарий, включающий в себя перекрестки, не действителен, может не создавать соответствующие экземпляры модулей оценки оперативного управления для конкретных сценариев, включающих в себя перекрестки.
[0285] Фиг. 9 представляет собой схематическое изображение примера сцены 9000 смены полосы, включающей в себя сценарий, включающий в себя смену полос, в соответствии с вариантами выполнения настоящего изобретения. Оперативное управление автономным транспортным средством, например, оперативное управление 5000 автономным транспортным средством, показанное на Фиг. 5, может включать в себя автономное транспортное средство 9100, например, транспортное средство 1000, показанное на Фиг. 1, одно из транспортных средств 2100, 2110, показанных на Фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство с автономным управлением, осуществляющее работу системы оперативного управления автономным транспортным средством, например, системы 4000 оперативного управления автономным транспортным средством, показанной на Фиг. 4, включающей в себя экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя смену полос, который может представлять собой экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя смену полос, например, модуля 4430 оценки оперативного управления для конкретного сценария, включающего в себя смену полос, показанного на Фиг. 4, который может представлять собой модель сценария оперативного управления автономным транспортным средством, который включает в себя автономное транспортное средство 9100, перемещающееся по участку сети движения транспортных средств путем выполнения смены полос. Для простоты и ясности участок сети движения транспортных средств, соответствующий сцене 9000 смены полосы, показанной на Фиг. 9, ориентирован на север сверху и на восток справа.
[0286] Участок сети движения транспортных средств, соответствующий сцене 9000 смены полосы, показанной на Фиг. 9, включает в себя автономное транспортное средство 9100, движущееся на север по первой дороге 9200. Первая дорога 9200 включают в себя восточную полосу 9210, идущую в северном направлении, и западную полосу 9220, идущую в северном направлении. Текущий ожидаемый путь 9110 автономного транспортного средства 9100 указывает, что автономное транспортное средство 9100 движется на север по восточной полосе 9210, идущей в северном направлении. Альтернативный ожидаемый путь 9120 автономного транспортного средства 9100, показанный пунктирной линией, указывает, что автономное транспортное средство 9100 может перемещаться по сети движения транспортных средств путем выполнения смены полосы с восточной полосы 9210, идущей в северном направлении, на западную полосу 9220, идущую в северном направлении.
[0287] Первое удаленное транспортное средство 9300 движется на север по восточной полосе 9210, идущей в северном направлении, перед автономным транспортным средством 9100 (севернее). Второе удаленное транспортное средство 9400 движется на север по западной полосе 9220, идущей в северном направлении, за автономным транспортным средством 9100 (южнее).
[0288] Система оперативного управления автономным транспортным средством может включать в себя контроллер оперативного управления автономным транспортным средством, например, контроллер 4100 оперативного управления автономным транспортным средством, показанный на Фиг. 4, или исполнитель 5100, показанный на Фиг. 5, и устройство отслеживания блокировки, например, устройство 4200 отслеживания блокировки, показанное на Фиг. 4, или устройство 5200 отслеживания блокировки, показанное на Фиг. 5. Автономное транспортное средство 9100 может включать в себя один или более датчиков, одно или более устройств отслеживания оперативной среды или их сочетание.
[0289] В некоторых вариантах выполнения система оперативного управления автономным транспортным средством может работать непрерывно или периодически, например, в каждом временном местоположении в последовательности временных местоположений. Для простоты и ясности геопространственное местоположение автономного транспортного средства 9100, первого удаленного транспортного средства 9300 и второго удаленного транспортного средства 9400 показаны в соответствии с первым, последовательно самым ранним временным местоположением из последовательности временных местоположений. Хотя для простоты и ясности описание приведено со ссылкой на последовательность временных местоположений, каждый блок системы оперативного управления автономным транспортным средством может работать с любой частотой, работа соответствующих блоков может быть синхронизирована или не синхронизирована, и операции могут выполняться одновременно с одним или более участками одного или более временных местоположений. Для простоты и ясности соответствующие описания одного или более временных местоположений, например, временных местоположений между временными местоположениями, описанными в настоящем документе, могут быть исключены из настоящего изобретения.
[0290] В одном или более временных местоположениях, например, в каждом временном местоположении, датчики автономного транспортного средства 9100 могут определять информацию, соответствующую оперативной среде автономного транспортного средства 9100, например, информацию, соответствующую одному или более удаленным транспортным средствам 9300, 9400.
[0291] В одном или более временных местоположениях, например, в каждом временном местоположении, система оперативного управления автономным транспортным средством может определять ожидаемый путь 9110, 9120 автономного транспортного средства 9100, маршрут (не показан) автономного транспортного средства 9100 или то и другое.
[0292] В одном или более временных местоположениях, например, в каждом временном местоположении, устройства отслеживания оперативной среды автономного транспортного средства 9100 могут определять или генерировать информацию об оперативной среде, представляющую оперативную среду автономного транспортного средства 9100 или ее аспект, например, в ответ на прием информации датчика, соответствующей удаленным транспортным средствам 9300, 9400, что может включать в себя связывание информации датчика с удаленными транспортными средствами 9300, 9400, и могут выводить информацию об оперативной среде, которая может включать в себя информацию, представляющую удаленные транспортные средства 9300, 9400, в контроллер оперативного управления автономным транспортным средством.
[0293] В одном или более временных местоположениях, например, в каждом временном местоположении, устройство отслеживания блокировки может генерировать информацию о вероятностях доступности, указывающую соответствующие вероятности доступности одной или более областей или участков сети движения транспортных средств. Например, устройство отслеживания блокировки может определять один или более вероятных ожидаемых путей 9310, 9320 первого удаленного транспортного средства 9300 и один или более вероятных ожидаемых путей 9410, 9420 второго удаленного транспортного средства 9400. Первый вероятный ожидаемый путь 9310 первого удаленного транспортного средства 9300 указывает, что первое удаленное транспортное средство 9300 перемещается по соответствующему участку сети движения транспортных средств по восточной полосе 9210, идущей в северном направлении. Второй вероятный ожидаемый путь 9320, показанный пунктирной линией, первого удаленного транспортного средства 9300 указывает, что первое удаленное транспортное средство 9300 перемещается по соответствующему участку сети движения транспортных средств путем выполнения смены полосы на западную полосу 9220, идущую в северном направлении. Первый вероятный ожидаемый путь 9410 второго удаленного транспортного средства 9400 указывает, что второе удаленное транспортное средство 9400 перемещается по соответствующему участку сети движения транспортных средств по западной полосе 9220, идущей в северном направлении. Второй вероятный ожидаемый путь 9420, показанный пунктирной линией, второго удаленного транспортного средства 9400 указывает, что второе удаленное транспортное средство 9400 перемещается по соответствующему участку сети движения транспортных средств путем выполнения смены полосы на восточную полосу 9210, идущую в северном направлении.
[0294] Устройство отслеживания блокировки может генерировать информацию о вероятностях доступности, указывающую соответствующие вероятности доступности одной или более областей или участков сети движения транспортных средств, соответствующих одному или более из ожидаемого пути 9110 автономного транспортного средства 9100 или альтернативного ожидаемого пути 9120 автономного транспортного средства 9100.
[0295] В некоторых вариантах выполнения генерация информации о вероятностях доступности может включать в себя генерацию вероятностей доступности соответствующей области или участка сети движения транспортных средств, соответствующего множеству временных местоположений из последовательности временных местоположений. Устройство отслеживания блокировки может выводить информацию о вероятностях доступности или обеспечивать доступ для контроллера оперативного управления автономным транспортным средством.
[0296] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может генерировать информацию об оперативной среде или обновлять ранее сгенерированную информацию об оперативной среде, что может включать в себя прием информации об оперативной среде или ее части.
[0297] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может обнаруживать или определять один или более отдельных оперативных сценариев транспортного средства, например, на основе оперативной среды, представленной информацией об оперативной среде, которая может включать в себя информацию об оперативной среде, выведенную устройствами отслеживания оперативной среды, информацию о вероятностях доступности, выведенную устройством отслеживания блокировки, или их сочетание. Например, контроллер оперативного управления автономным транспортным средством может обнаруживать или определять один или более из первого сценария, включающего в себя смену полос, который включает в себя первое удаленное транспортное средство 9300, второго сценария, включающего в себя смену полос, который включает в себя второе удаленное транспортное средство 9400, или то и другое.
[0298] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может создавать один или более экземпляров модулей оценки оперативного управления для конкретных сценариев, включающих в себя смену полос, в ответ на обнаружение или определение одного или более из первого сценария, включающего в себя смену полос, или второго сценария, включающего в себя смену полос.
[0299] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может передавать или иным образом делать доступной информацию об оперативной среде, например, новую или обновленную информацию об оперативной среде, для ранее созданных или работающих экземпляров модулей оценки оперативного управления для конкретных сценариев.
[0300] Создание или обновление экземпляра модуля оценки оперативного управления для конкретного сценария может включать в себя обеспечение информации об оперативной среде или ее части, например, информации датчика или вероятностей доступности, для соответствующих экземпляров модулей оценки оперативного управления для конкретных сценариев, например, путем передачи информации об оперативной среде или ее части в соответствующие экземпляры модулей оценки оперативного управления для конкретных сценариев или сохранения информации об оперативной среде или ее части для доступа соответствующих экземпляров модулей оценки оперативного управления для конкретных сценариев.
[0301] В некоторых вариантах выполнения информация об оперативной среде может указывать рабочую информацию автономного транспортного средства 9100, например, информацию о геопространственном местоположении, информацию о скорости, информацию об ускорении или их сочетание, и рабочую информацию одного или более удаленных транспортных средств 9300, 9400, например, информацию о геопространственном местоположении, информацию о скорости, информацию об ускорении или их сочетание.
[0302] Модуль оценки оперативного управления для конкретного сценария, включающего в себя смену полос, может моделировать сценарий, включающий в себя смену полос, как включающий в себя состояния, представляющие пространственно-временные местоположения автономного транспортного средства 9100, пространственно-временные местоположения соответствующих удаленных транспортных средств 9300, 9400 и соответствующие вероятности блокировки. Модуль оценки оперативного управления для конкретного сценария, включающего в себя смену полос, может моделировать сценарий, включающий в себя смену полос, как включающий в себя действия, например, «поддерживать», «ускориться», «замедлиться» и «продолжить» (смена полос). Модуль оценки оперативного управления для конкретного сценария, включающего в себя смену полос, может моделировать сценарий, включающий в себя смену полос, как включающий в себя вероятности перехода состояний, представляющие вероятности того, что соответствующее удаленное транспортное средство 9300, 9400 окажется на ожидаемом пути 9110, 9120 автономного транспортного средства 9100. Например, первое удаленное транспортное средство 9300 может оказаться на альтернативном ожидаемом пути 9120 автономного транспортного средства 9100 при движении по альтернативному ожидаемому пути 9320 первого удаленного транспортного средства 9300 со скоростью меньше, чем скорость автономного транспортного средства 9100. В другом примере второе удаленное транспортное средство 9400 может оказаться на альтернативном ожидаемом пути 9120 автономного транспортного средства 9100 при движении по ожидаемому пути 9410 второго удаленного транспортного средства 9400 со скоростью больше, чем скорость автономного транспортного средства 9100. Вероятности перехода состояний могут быть определены на основе информации об оперативной среде. Модуль оценки оперативного управления для конкретного сценария, включающего в себя смену полос, может моделировать сценарий, включающий в себя смену полос, как включающий в себя отрицательные вознаграждения за нарушение правил дорожного движения и включающий в себя положительное вознаграждение за завершение сценария, включающего в себя смену полос.
[0303] В одном или более временных местоположениях, например, в каждом временном местоположении, соответствующие экземпляры модулей оценки оперативного управления для конкретных сценариев, включающих в себя смену полос, могут принимать или иным образом получать доступ к информации об оперативной среде, которая соответствует соответствующим сценариям, включающим в себя смену полос. Например, второй экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя смену полос, может принимать информацию об оперативной среде, соответствующую второму сценарию, включающему в себя смену полос, которая может включать в себя информацию о вероятностях доступности области или участка сети движения транспортных средств вблизи точки схождения между ожидаемым путем 9410 второго удаленного транспортного средства 9400 и альтернативным ожидаемым путем 9120 автономного транспортного средства 9100.
[0304] В одном или более временных местоположениях, например, в каждом временном местоположении, каждый созданный экземпляр модуля оценки оперативного управления для конкретного сценария, включающего в себя смену полос, может генерировать соответствующее возможное действие по управлению транспортным средством, например, «поддерживать», «ускориться», «замедлиться» или «продолжить», на основе соответствующего смоделированного сценария и соответствующей информации об оперативной среде и может выводить соответствующее возможное действие по управлению транспортным средством в контроллер оперативного управления автономным транспортным средством, например, путем передачи соответствующего возможного действия по управлению транспортным средством в контроллер оперативного управления автономным транспортным средством или сохранения соответствующего возможного действия по управлению транспортным средством для доступа контроллера оперативного управления автономным транспортным средством.
[0305] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может принимать возможные действия по управлению транспортным средством от соответствующих созданных экземпляров модулей оценки оперативного управления для конкретных сценариев, включающих в себя смену полос, и может определять действие по управлению транспортным средством на основе принятых возможных действий по управлению транспортным средством для управления автономным транспортным средством 9100 в соответствующем временном местоположении и может управлять автономным транспортным средством 9100 для перемещения по сети движения транспортных средств или ее участку в соответствии с определенным действием по управлению транспортным средством.
[0306] В одном или более временных местоположениях, например, в каждом временном местоположении, контроллер оперативного управления автономным транспортным средством может определять, действителен ли один или более определенных сценариев, включающих в себя смену полос, и в ответ на определение, что сценарий, включающий в себя смену полос, не действителен, может не создавать соответствующие экземпляры модулей оценки оперативного управления для конкретных сценариев, включающих в себя смену полос.
[0307] Вышеописанные аспекты, примеры и реализации описаны для облегчения понимания настоящего изобретения, а не для ограничения. Наоборот, настоящее изобретение охватывает различные модификации и эквивалентные конструкции, включенные в пределы объема приложенной формулы изобретения, причем этот объем должен соответствовать самой широкой трактовке, чтобы охватывать все такие модификации и эквивалентные конструкции по закону.
Реферат
Изобретение относится к способу отслеживания блокировки сети движения транспортных средств. Способ отслеживания блокировки сети движения транспортных средств содержит этап, на котором осуществляют перемещение по участку сети движения транспортных средств на основе вероятности доступности. При перемещении по сети движения осуществляют работу устройства отслеживания блокировки. Работа устройства отслеживания блокировки включает в себя этапы, на которых определяют информацию об оперативной среде, определяют первую область сети движения на основе текущего местоположения и идентифицированного маршрута автономного транспортного средства и определяют вероятность доступности первой области на основе информации об оперативной среде. Определение вероятности доступности первой области включает в себя этапы, на которых определяют второй ожидаемый путь второго внешнего объекта и вторую область сети движения, соответствующую пространственному и временному пересечению первого ожидаемого пути и второго ожидаемого пути. При условии, что первый внешний объект представляет собой удаленное транспортное средство, определяют, что второй ожидаемый путь включает в себя второй внешний объект, перемещающийся по второму участку сети движения, соответствующему второй области, в первом временном местоположении, и определяют, что первый ожидаемый путь включает в себя первый внешний объект, перемещающийся по второму участку во втором временном местоположении, следующем за первым временным местоположением. Достигается повышение безопасности перемещения автономных транспортных средств. 3 н. и 14 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Навигационное устройство, навигационный сервер и навигационная система
Комментарии