Способ управления устройством сцепления и электронно-управляемое фрикционное сцепление - RU2564062C2
Код документа: RU2564062C2
Чертежи
Описание
Изобретение относится к способу управления устройством сцепления, в особенности, к фрикционному сцеплению. Оно относится, кроме того, к электронно-управляемому фрикционному сцеплению с управлением для выполнения способа.
Устройства сцепления в транспортных средствах с автоматически переключаемыми коробками передач, под которыми здесь понимаются как автоматическая коробка передач, так и автоматизированная ступенчатая коробка передач, в настоящее время часто оснащаются функцией замедления, которая допускает замедление, то есть очень медленное перемещение, транспортного средства, как это известно для транспортных средств с автоматическими коробками передач с преобразователем вращающего момента. В определенных ситуациях дорожного движения, например, при парковке или при движении с частыми остановками, замедление представляет для водителя комфортную функцию. Во всяком случае, различные ситуации дорожного движения предъявляют различные требования к замедлению.
Из DE 19720131 А1 известен способ для управления устройством сцепления, при котором на основе ограниченной по времени предыстории в форме оценки профиля скорости транспортного средства осуществляется задание номинального значения для момента замедления.
Этот способ позволяет в соответствии с этим для ситуаций дорожного движения, которые различаются на основе профиля скорости непосредственно в прошлом, обеспечить подходящий момент замедления.
Задачей изобретения является предложить способ для управления устройством сцепления, с помощью которого процесс замедления в транспортном средстве может еще более точно быть согласован с мгновенной ситуацией дорожного движения.
В соответствии с изобретением эта задача решается совокупностью признаков независимых пунктов формулы изобретения. Предпочтительные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения.
В соответствующем изобретению способе для управления устройством сцепления между двигателем и автоматически переключаемой коробкой передач транспортного средства, причем устройство сцепления имеет позицию замедления, в которой момент замедления передается между двигателем и коробкой передач, определяется номинальное значение для момента замедления как функция мгновенного сопротивления движению.
В соответствующем изобретению способе, таким образом, не в каждой ситуации дорожного движения, в которой осуществляется замедление, то же самое номинальное значение применяется для управления и регулирования момента замедления. Напротив, номинальное значение согласуется с мгновенными условиями движения, так что в различных ситуациях дорожного движения передаются различные моменты замедления.
В форме выполнения на основе мгновенного сопротивления движению набор параметров, определяющий временную характеристику номинального значения момента замедления, выбирается из некоторого количества наборов параметров, сохраненных в памяти данных.
Это имеет преимущество, состоящее в том, что момент замедления может оптимальным образом согласовываться с мгновенным требованием, потому что оно является переменным не только по абсолютному значению, но и по своей временной характеристике изменения. Например, при движении с частыми остановками предпочтителен сравнительно низкий максимальный момент замедления, который к тому же плавно нарастает. Напротив, при остановке на горке, чтобы предотвратить скатывание транспортного средства назад, предпочтителен более высокий момент замедления, который к тому же сравнительно быстро нарастает.
Если бы в ситуации остановки на горке руководствовались моментом замедления, подходящим к ситуации движения с частыми остановками, то невозможно было бы предотвратить скатывание назад транспортного средства. И наоборот, подходящий для ситуации на горке момент замедления был бы слишком сильным при движении с частыми остановками или при парковке, и, прежде всего, применяемый рывком, воспринимался бы как некомфортный.
Поэтому в форме выполнения при наличии высокого мгновенного сопротивления движению выбирается набор параметров с более высоким максимальным моментом замедления, чем при наличии более низкого мгновенного сопротивления движению.
При наличии высокого мгновенного сопротивления движению выбирается набор параметров с более высоким к началу процесса замедления временным изменением момента замедления, чем при наличии более низкого мгновенного сопротивления движению.
В соответствующем изобретению способе можно, таким образом, для каждой ситуации дорожного движения обеспечить особенно комфортное и надежное замедление.
При этом использование сопротивления движению в качестве указателя для мгновенной ситуации дорожного движения имеет преимущество, состоящее в том, что сопротивление движению представляет собой параметр, определяемый легко и без дополнительных затрат на измерения, и к тому же доставляет информацию, например, о текущем уклоне пути, которую не мог бы предоставить, например, один только профиль скорости. Текущая ситуация дорожного движения может поэтому определяться очень дифференцированно.
Способы определения сопротивления движению известны и используются на практике. В одной форме выполнения изобретения, например, применяется способ, который содержит следующие этапы: определяется мгновенный крутящий момент двигателя, а также мгновенное изменение числа оборотов колес. На основе теоретической модели транспортного средства вычисляется номинальное ускорение для нормальных условий из измеренного крутящего момента двигателя.
В основе модели транспортного средства лежат известные значения для нормальных условий, то есть, например, плоская и ровная дорога и безветрие. Затем из вычисленного номинального ускорения и измеренного изменения числа оборотов колес определяется дифференциальное ускорение, которое исчезает, если имеют место нормальные условия.
В одной форме выполнения изобретения устройство сцепления переводится в позицию замедления, если устройство управления установило, что выполняются следующие условия: скорость v движения лежит ниже порогового значения v1 скорости, и педаль тормоза не приведена в действие.
Эти условия характеризуют ситуацию дорожного движения, в которой транспортное средство лишь медленно перемещается, и водителю, возможно, хочется осуществить замедление, воспринимая его как комфортное и предпочтительное. Поэтому в этой ситуации дорожного движения вводится процесс замедления.
Если эти условия перед вводом процесса замедления не выполняются, то исходят из того, что замедление нежелательно, и водитель хотел бы, например, двигаться с более высокой скоростью или остановиться.
В своей позиции замедления сцепление является, например, легко прикладываемым, так что на основе дифференциального числа оборотов между двигателем и коробкой передач момент замедления от двигателя передается на коробку передач.
В одной форме выполнения изобретения устройство сцепления, когда педаль тормоза приведена в действие, перемещается из своей позиции замедления в свою разомкнутую позицию, и процесс замедления прерывается. При отпускании педали тормоза устройство сцепления вновь переходит в свою позицию замедления, и процесс замедления продолжается.
Этот способ имеет преимущество, состоящее в том, что замедление не должно заново активироваться каждый раз, когда транспортное средство, например, в пробке, кратковременно останавливается.
Более того, функция замедления, когда она один раз активирована, остается активной и при торможении и деактивируется только тогда, когда устанавливается повышенная скорость движения, превышающая пороговое значение v1 скорости.
В одной форме выполнения изобретения пороговое значение v1 скорости выбирается меньшим или равным 6 км/час, в частности меньшим или равным 4 км/час. В этом низком диапазоне скоростей можно исходить из того, что в принципе замедление может быть желательным.
Изобретение включает в себя компьютерную программу, а также компьютерный программный продукт для выполнения способа согласно любому из вышеописанных примеров выполнения.
Соответствующий изобретению способ в особенности пригоден для использования в случае электронно-управляемых работающих в масле или сухих фрикционных сцеплений.
Примеры выполнения изобретения далее описываются более подробно со ссылками на приложенные чертежи.
Фиг.1 показывает на основе блок-схемы последовательности операций выполнение способа для управления устройством сцепления согласно одной форме выполнения изобретения, и
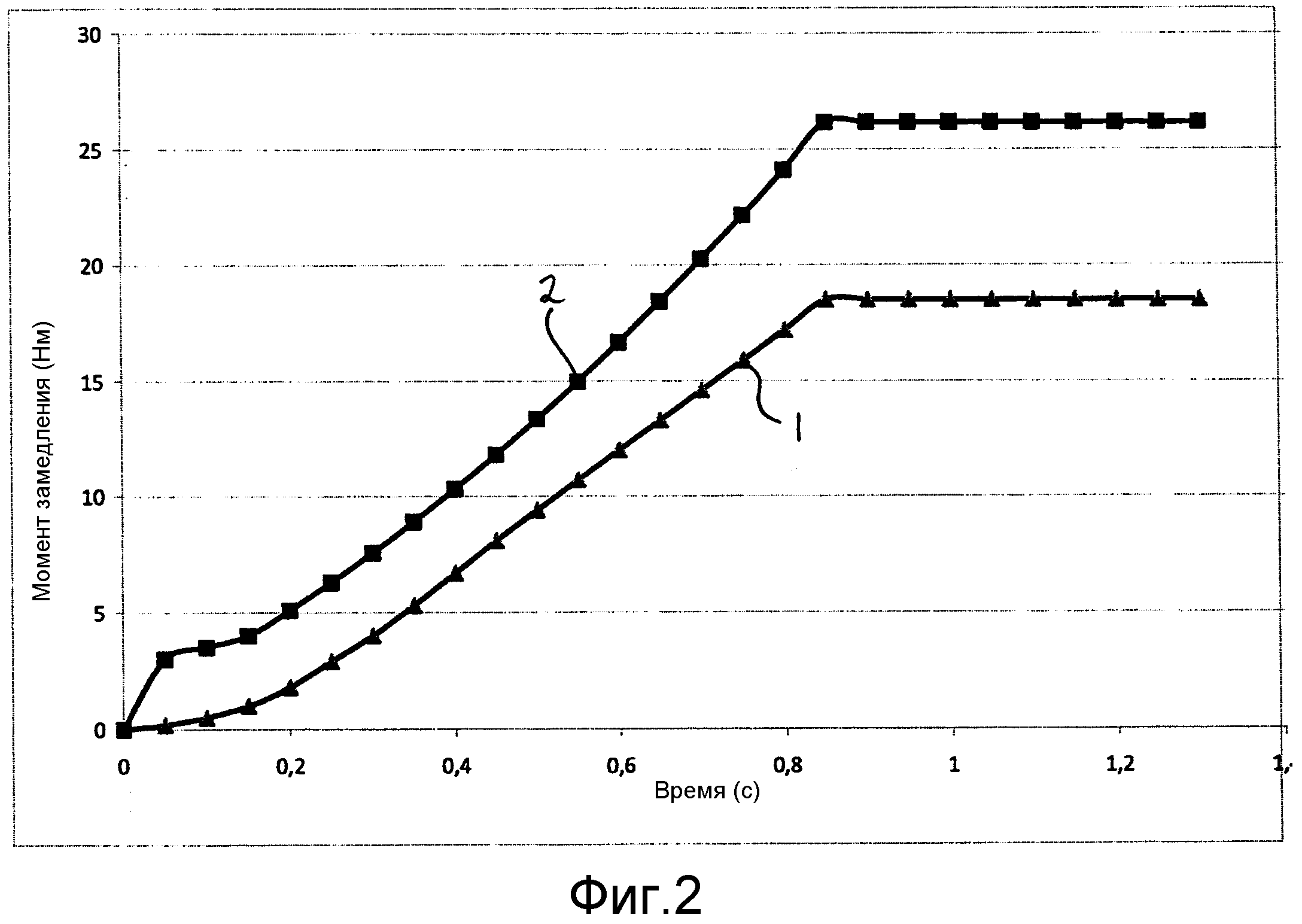
фиг.2 показывает временную характеристику номинального значения момента замедления для двух взятых для примера наборов параметров, применяемых в способе по фиг.1.
Применяемая коробка передач транспортного средства представляет собой автоматически переключаемую коробку передач.
При холостом ходе транспортного средства не предоставляется функция замедления, а только если включена передача, то есть если коробка передач находится, например, в состояниях переключения D или R.
Во время режима движения транспортного средства постоянно определяется текущее сопротивление движению, например, из мгновенного крутящего момента двигателя и мгновенного изменения числа оборотов колес и на основе теоретической модели транспортного средства.
Чтобы установить, что достигнута ситуация дорожного движения, в которой предпочтительным является замедление транспортного средства, сначала определяется, находится ли скорость v движения ниже порогового значения v1 скорости, причем v1 составляет, например, 4 км/час.
Если это первое условие не выполняется, то осуществляется нормальное движение. Если это условие выполняется, то затем определяется, приведена ли в действие педаль тормоза. Если нет, то устройство сцепления переводится в позицию замедления, и вводится процесс замедления.
Для этого блок управления устройством сцепления выбирает набор параметров замедления из множества сохраненных в его памяти данных наборов параметров, которые устанавливают временную характеристику изменения номинального значения для момента замедления. При этом набор параметров содержит, в частности, номинальное значение для максимального момента замедления, а также временную характеристику момента замедления перед достижением максимального момента замедления.
При этом при опрашивании условий не требуется обязательно придерживаться описанной последовательности. Нужно только определять, выполнены ли условия, которые характеризуют состояние движения, в котором водителю желательно очень медленное перемещение, то есть соответственно - замедление.
Если функция замедления один раз активирована, то она, например, из-за торможения при движении с частыми остановками, не деактивируется вновь, а процесс замедления заканчивается только в том случае, если устанавливается скорость движения выше порогового значения vi скорости. Он повторно вводится, если названные условия вновь выполняются.
Фиг. 2 показывает временную характеристику номинального значения момента замедления для двух различных наборов параметров.
Номинальное значение для момента замедления нанесено на график в Нм в зависимости от времени в секундах и воспроизводит типовые номинальные значения для момента замедления, причем также возможны более высокие и более низкие номинальные значения.
Кривая, обозначенная 1, воспроизводит временную характеристику номинального значения для момента замедления, который является предпочтительным, например, при движении с частыми остановками или в подобных ситуациях на ровной дороге.
Момент замедления медленно, то есть с незначительным изменением во времени в начале, нарастает и достигает относительно невысокого максимального значения.
В принципе является обычным момент замедления увеличивать постепенно. Положение точек касания сцепления известно лишь теоретически, а практически могут иметь место отклонения, которые предпочтительным образом позволяют выполнять плавное приведение в действие точек касания и, следовательно, плавное приложение сцепления.
Кривая, обозначенная 2, воспроизводит временную характеристику номинального значения момента замедления, который является предпочтительным, например, при остановке на горке.
Момент замедления в данном случае, в противоположность вышеописанной ситуации дорожного движения, относительно более быстро, то есть с более значительным временным изменением в начале, нарастает и достигает относительно высокого максимального значения.
Здесь точка касания в соответствии с указанным относительно быстро приводится в действие, чтобы момент замедления быстро воздействовал. На основе этой характеристики момент замедления в состоянии препятствовать скатыванию назад транспортного средства на горке, когда водитель убирает ногу с педали тормоза.
В соответствующем изобретению способе множество подобных наборов параметров может быть сохранено в памяти данных, чтобы принимать во внимание множество ситуаций дорожного движения. В частности, в основу выбора подходящего набора параметров может также быть положена временная характеристика сопротивления движению непосредственно перед началом замедления, наряду с мгновенным значением сопротивления движению.
Реферат
Изобретение относится к управлению сцеплением. В способе для управления устройством сцепления между двигателем и автоматической коробкой передач транспортного средства определяют номинальное значение для момента замедления как функцию сопротивления движению. На основе сопротивления движению выбирают набор параметров, определяющий временную характеристику номинального значения момента замедления, из некоторого количества наборов параметров, сохраненных в памяти данных. Также изобретение относится к электронно-управляемому фрикционному сцеплению с вышеуказанным устройством управления. Повышается точность согласования процесса замедления с дорожной ситуацией. 2 н. и 5 з.п. ф-лы, 2 ил.
Формула
- скорость v движения лежит ниже порогового значения v1 скорости, и
- педаль тормоза не приведена в действие.
- определение мгновенного крутящего момента двигателя и мгновенного изменения числа оборотов колес,
- вычисление номинального ускорения для нормальных условий на основе теоретической модели транспортного средства из измеренного крутящего момента двигателя,
- определение дифференциального ускорения из вычисленного номинального ускорения и измеренного изменения числа оборотов колес.
Комментарии