Способ управления движением транспортного средства и устройство управления движением - RU2715667C1
Код документа: RU2715667C1
Чертежи
Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления движением и к оборудованию управления движением, которые управляют движением транспортного средства.
Уровень техники
[0002] Известно устройство управления удержанием на полосе движения, которое управляет рассматриваемым транспортным средством с возможностью двигаться по целевой траектории автоматизированным или автономным способом (например, патентный документ 1; JP2015-123929A). Когда ширина проезжей дороги является большой, это устройство работает с возможностью задавать усиление обратной связи по поперечной позиции равным большему значению, чем значение, когда ширина проезжей дороги является небольшой, чтобы за счет этого выполнять естественную и устойчивую помощь при рулении на скоростной автомагистрали, имеющей большую ширину проезжей дороги. С другой стороны, на общей дороге, имеющей небольшую ширину проезжей дороги, оптимальное управление удержанием на полосе движения выполняется без создания помех для маневра предотвращения столкновения от водителя.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2015-123929A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее при вышеописанном традиционном управлении удержанием на полосе движения, величина позиционного отклонения между траекторией транспортного средства и целевой траекторией в обозреваемой впереди точке вычисляется, чтобы вычислять величину управления с обратной связью по поперечной позиции; в силу этого на дороге, на которой варьирование радиуса R кривизны не является монотонным, к примеру, на общей городской дороге, которая включает в себя въезд на перекресток и выезд с перекрестка, текущая поперечная позиция может представлять собой проезд по сокращенному пути или по окружному пути относительно целевой траектории, что может быть проблематичным.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ управления движением для транспортного средства и оборудование управления движением для транспортного средства, с помощью которых рассматриваемое транспортное средство может надлежащим образом управляться с возможностью двигаться автономным способом вдоль целевой траектории без проезда по сокращенному пути или по окружному пути относительно целевой траектории.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему следующим образом. В способе управления движением для транспортного средства, в котором рассматриваемое транспортное средство управляется с возможностью двигаться автономным способом вдоль целевой траектории, до того, как расстояние до обозреваемой впереди точки от рассматриваемого транспортного средства до обозреваемой впереди точки задается, расстояние до обозреваемой впереди точки предварительно задается, и оценивается траектория движения рассматриваемого транспортного средства, при которой рассматриваемое транспортное средство совпадает с целевой траекторией в обозреваемой впереди точке, если рассматриваемое транспортное средство движется на предварительно заданное расстояние до обозреваемой впереди точки. Затем обнаруживается максимальное значение поперечного смещения между оцененной траекторией движения рассматриваемого транспортного средства и целевой траекторией в ходе движения из текущей позиции рассматриваемого транспортного средства в обозреваемую впереди точку, расстояние до обозреваемой впереди точки, когда максимальное значение поперечного смещения составляет предварительно определенное значение или меньше, определенно задается в качестве фактического расстояния до обозреваемой впереди точки, и рассматриваемое транспортное средство после этого управляется с возможностью двигаться автономным способом на основе определенно заданного расстояния до обозреваемой впереди точки.
Преимущества изобретения
[0007] Согласно настоящему изобретению, до того, как задается расстояние до обозреваемой впереди точки, траектория движения рассматриваемого транспортного средства оценивается для предварительно заданного расстояния до обозреваемой впереди точки, и соответствующее расстояние до обозреваемой впереди точки ищется до тех пор, пока максимальное значение поперечного смещения между оцененной траекторией движения рассматриваемого транспортного средства и целевой траекторией не станет предварительно определенным значением или меньше; в силу этого расстояние до обозреваемой впереди точки, которое должно фактически задаваться, уже оптимизировано. Как результат, рассматриваемое транспортное средство может надлежащим образом управляться с возможностью двигаться автономным способом вдоль целевой траектории без проезда по сокращенному пути или по окружному пути относительно целевой траектории.
Краткое описание чертежей
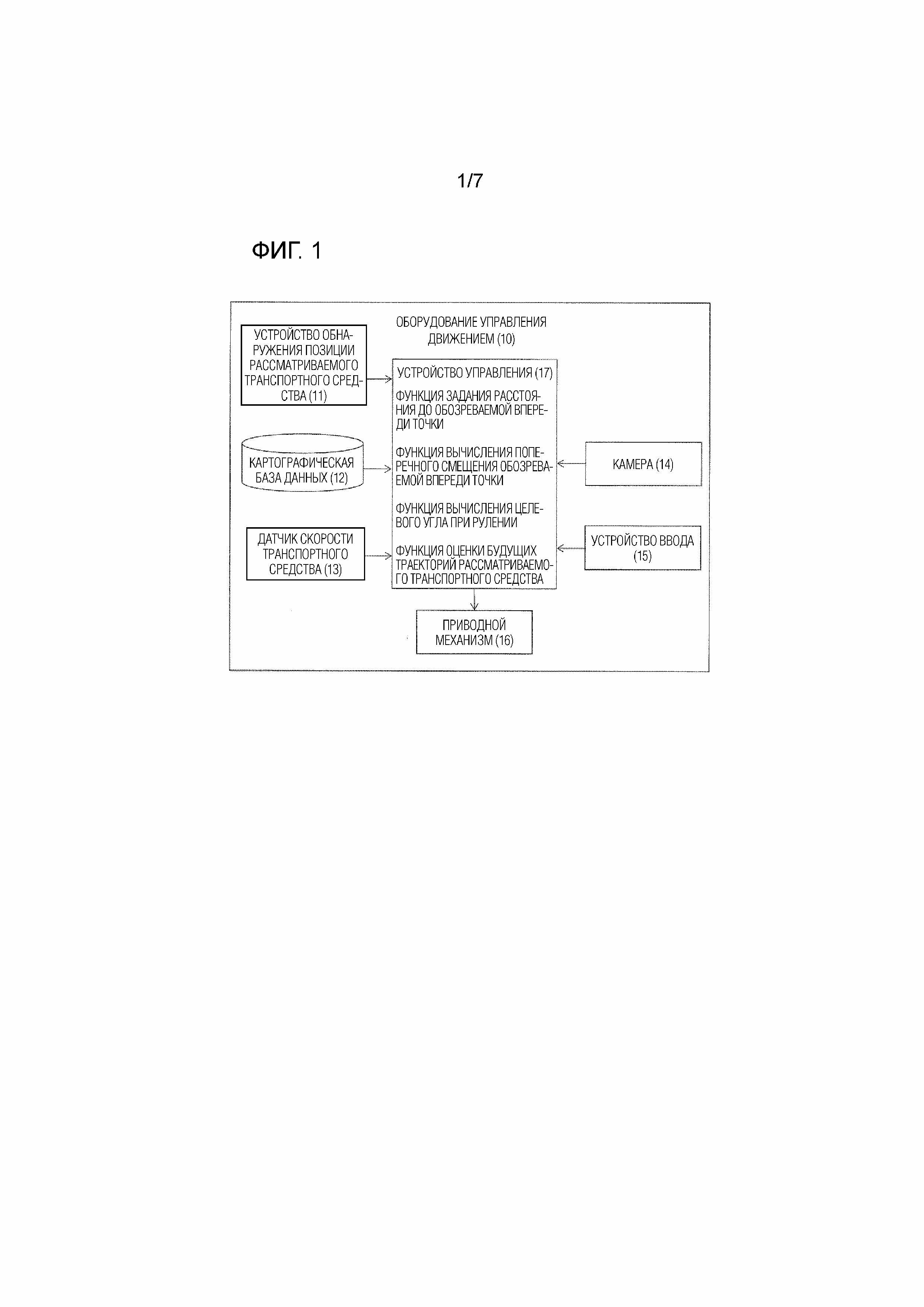
[0008] Фиг. 1 является блок-схемой, иллюстрирующей оборудование управления движением согласно варианту осуществления настоящего изобретения.
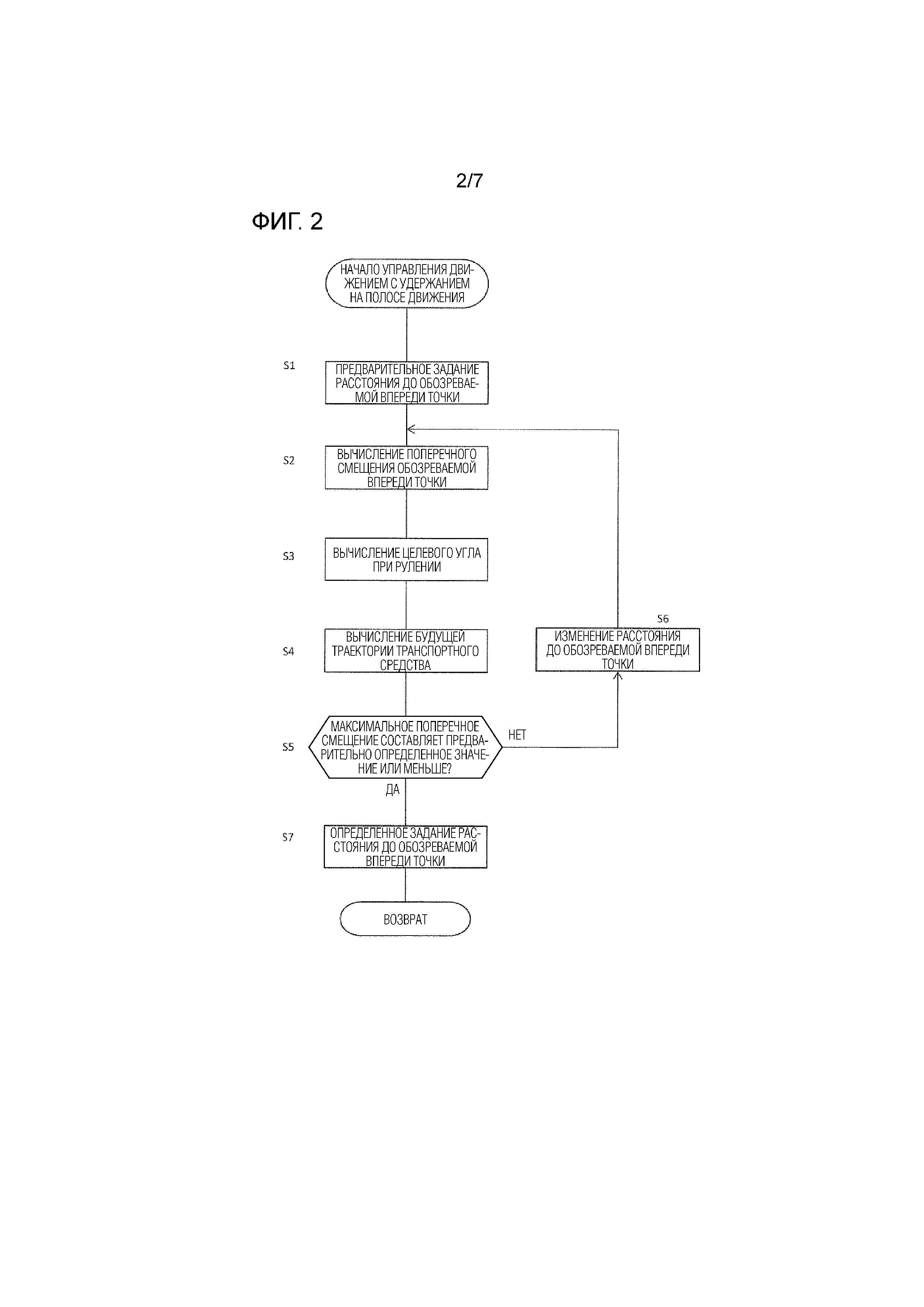
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением, выполняемый в устройстве управления по фиг. 1.
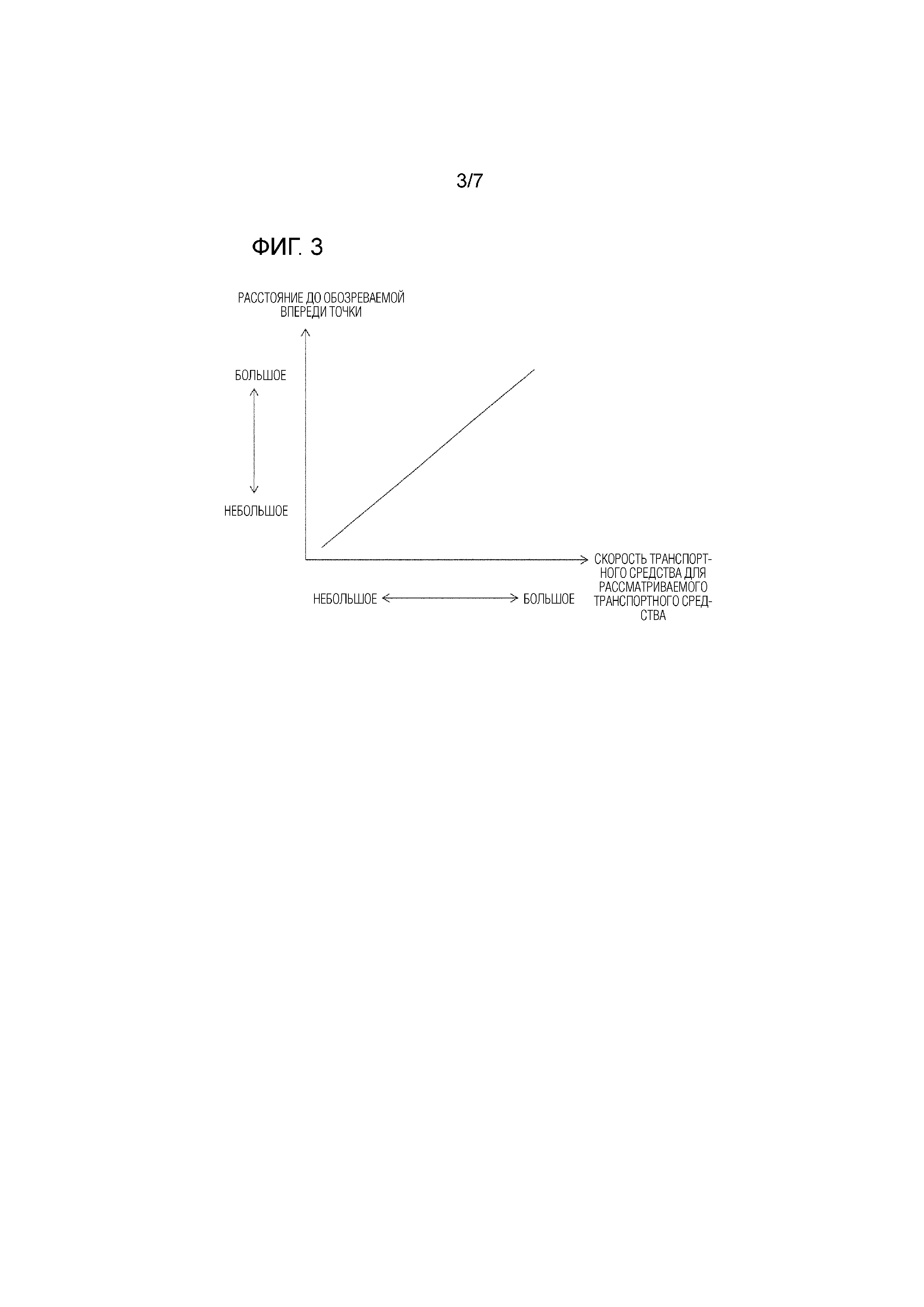
Фиг. 3 является графиком, иллюстрирующим взаимосвязь между расстоянием до обозреваемой впереди точки, которое предварительно задается на этапе S2 по фиг. 2, и скоростью транспортного средства для рассматриваемого транспортного средства.
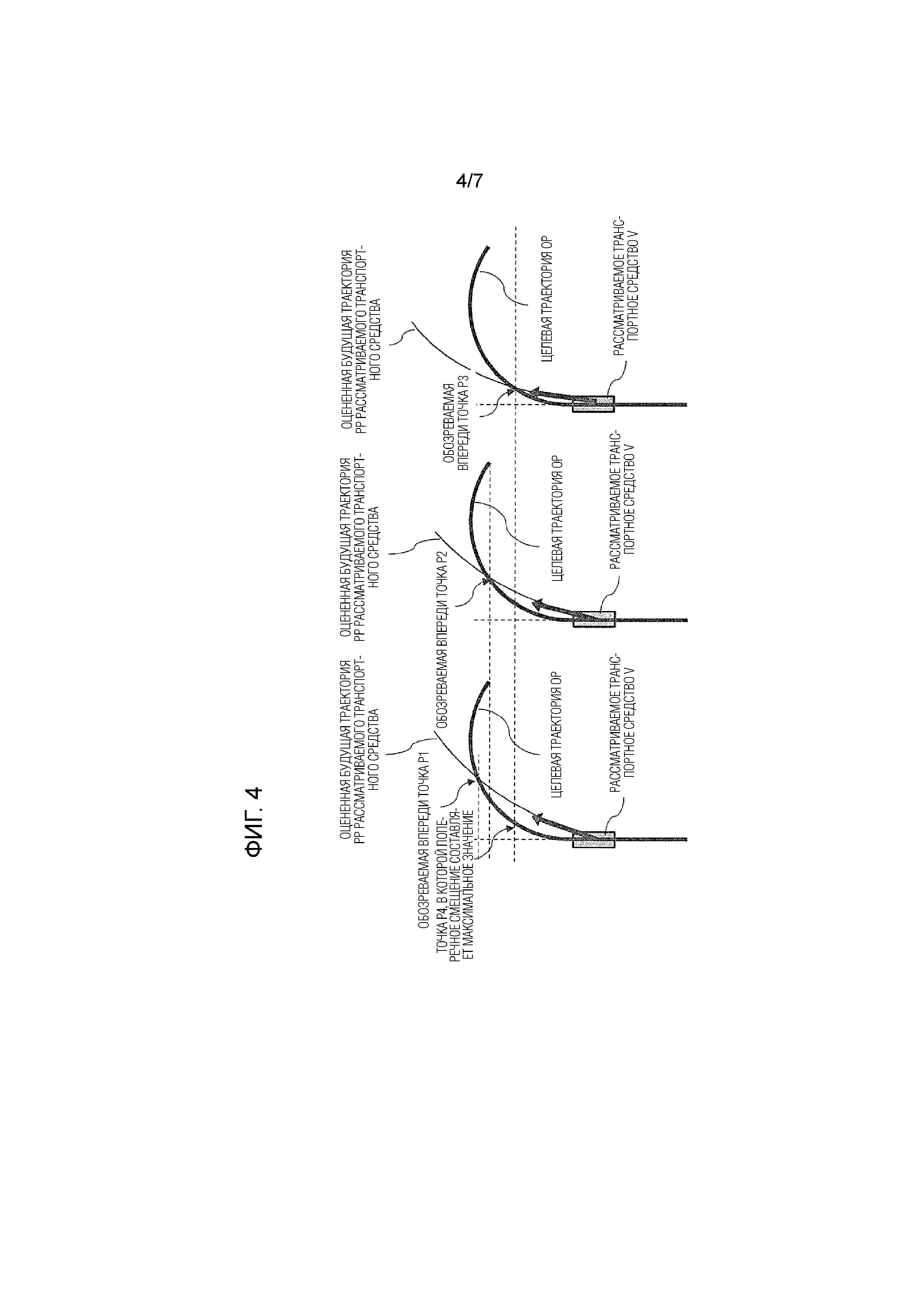
Фиг. 4 является видом сверху, иллюстрирующим пример окружения, соответствующего процессу этапов "S2-S5 --> S6 --> S2-S5 --> S7" по фиг. 2.
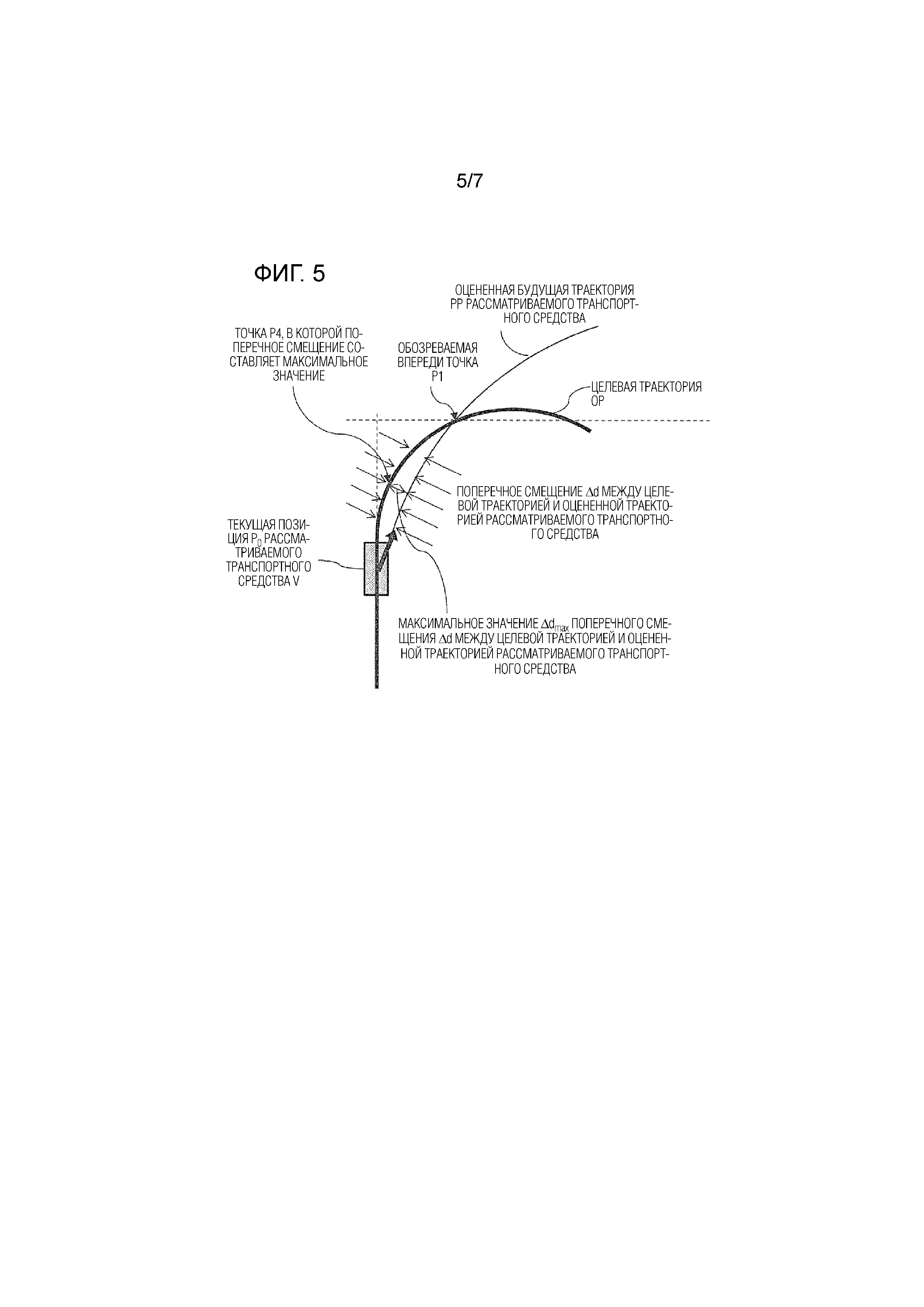
Фиг. 5 является видом сверху, иллюстрирующим окружение для описания максимального значения, которое определяется на этапе S5 по фиг. 2, поперечного смещения между оцененной траекторией движения рассматриваемого транспортного средства и целевой траекторией.
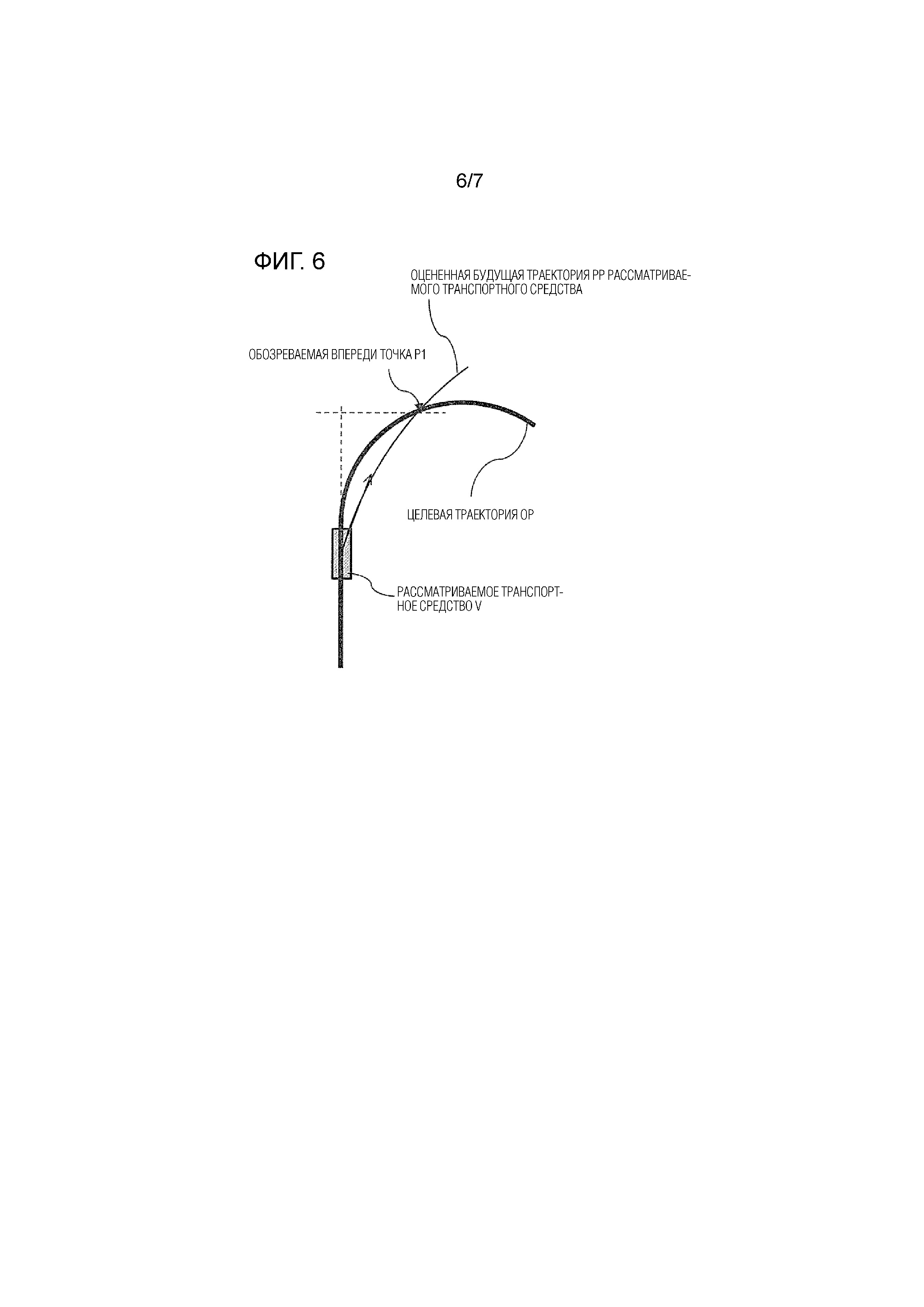
Фиг. 6 является видом сверху, иллюстрирующим примерное движение (сравнительный пример) при проезде по сокращенному пути рассматриваемого транспортного средства, которое осуществляется, когда процесс этапов S2-S7 по фиг. 2 не выполняется.
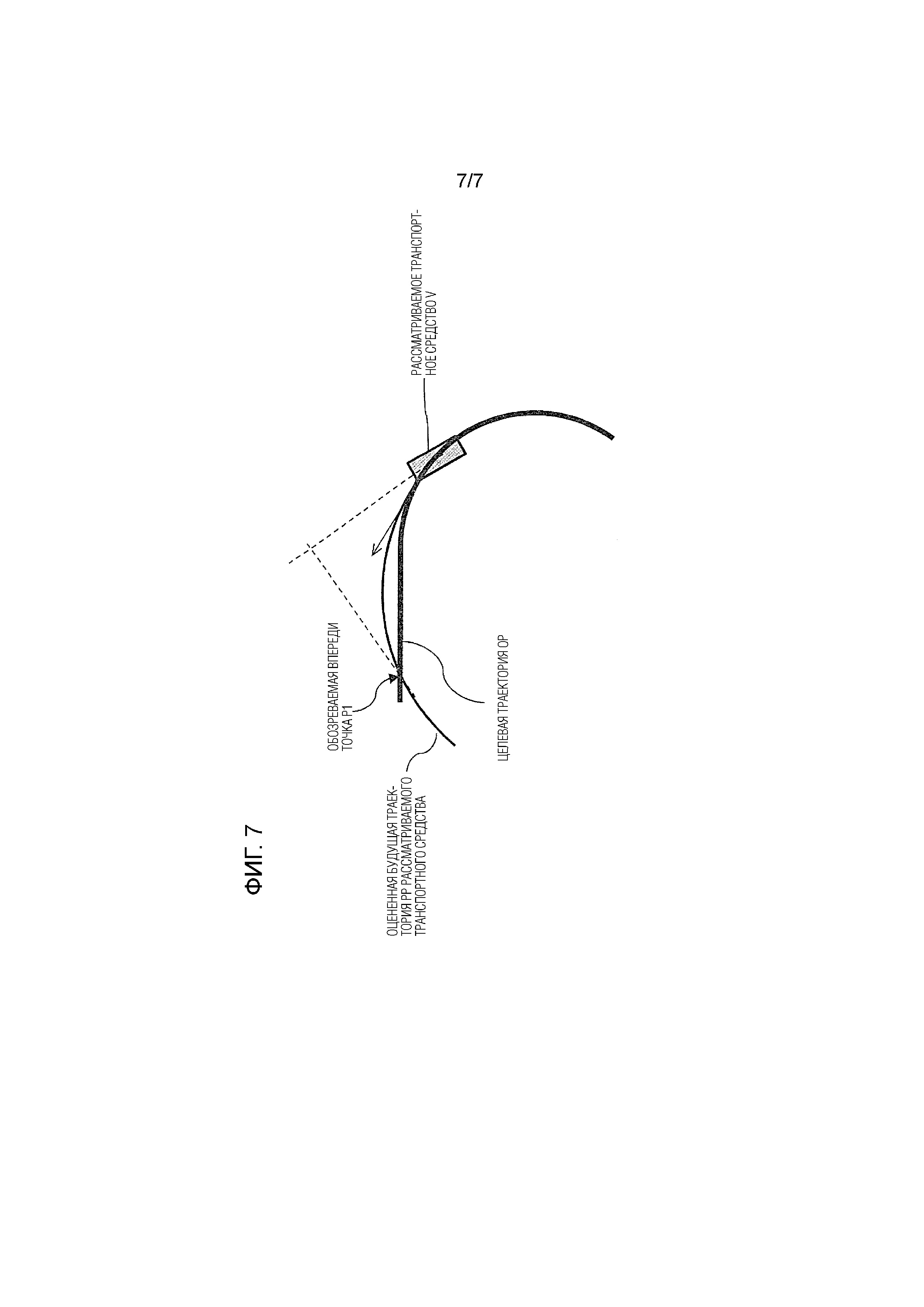
Фиг. 7 является видом сверху, иллюстрирующим примерное движение (сравнительный пример) при проезде по окружному пути рассматриваемого транспортного средства, которое осуществляется, когда процесс этапов S2-S7 по фиг. 2 не выполняется.
Оптимальный режим осуществления изобретения
[0009] В дальнейшем в этом документе, описываются оборудование и способ для управления движением транспортного средства согласно варианту осуществления настоящего изобретения со ссылкой на чертежи. В настоящем варианте осуществления, настоящее изобретение описывается посредством примерной иллюстрации оборудования управления движением, оснащенного в транспортном средстве.
[0010] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию оборудования 10 управления движением согласно варианту осуществления настоящего изобретения. Как проиллюстрировано на фиг. 1, оборудование 10 управления движением согласно настоящему варианту осуществления включает в себя устройство 11 обнаружения позиции рассматриваемого транспортного средства, картографическую базу 12 данных, датчик 13 скорости транспортного средства, камеру 14, устройство 15 ввода, приводной механизм 16 и устройство 17 управления. Эти компоненты соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0011] Устройство 11 обнаружения позиции рассматриваемого транспортного средства, которое включает в себя GPS-модуль, обнаруживает радиоволны, передаваемые из множества спутников связи, чтобы периодически получать позиционную информацию рассматриваемого транспортного средства, и обнаруживает текущую позицию рассматриваемого транспортного средства на основе полученной позиционной информации рассматриваемого транспортного средства, информации варьирования угла, полученной из гиродатчика, и скорости транспортного средства, полученной из датчика скорости транспортного средства. Помимо этого или альтернативно, устройство 11 обнаружения позиции рассматриваемого транспортного средства может обнаруживать позицию рассматриваемого транспортного средства с использованием известной технологии согласования с картой. Позиционная информация рассматриваемого транспортного средства, обнаруженная посредством устройства 11 обнаружения позиции рассматриваемого транспортного средства, выводится в устройство 17 управления.
[0012] Картографическая база 12 данных сохраняет картографическую информацию. В картографической информации, сохраненной в картографической базе 12 данных, не только информация узлов, но также и информация относительно формы дороги в каждой картографической координате, например, атрибуты относительно кривых, уклонов, перекрестков, развязок, узких дорог, прямых дорог, сооружений на обочине дороги и точек слияния, записывается таким образом, что она ассоциирована с картографическими координатами. Картографическая информация, сохраненная в картографической базе 12 данных, считывается в устройство 17 управления.
[0013] Датчик 13 скорости транспортного средства измеряет частоту вращения приводной системы, к примеру, ведущего вала и определяет скорость движения (также в дальнейшем называемую "скоростью транспортного средства") рассматриваемого транспортного средства на основе измеренной частоты вращения. Информация скорости транспортного средства для рассматриваемого транспортного средства, определенная посредством датчика 13 скорости транспортного средства, выводится в устройство 17 управления. Для автоматизированного или автономного управления рулением на основе модели по принципу обозреваемых впереди точек, которая описывается ниже, предоставляются датчик угловой скорости относительно вертикальной оси, датчик ускорения и другие необходимые датчики.
[0014] Камера 14 захватывает изображения дороги и/или объекта рядом с рассматриваемым транспортным средством. В настоящем варианте осуществления, камера 14 захватывает изображения впереди рассматриваемого транспортного средства и обнаруживает разделительные линии полосы движения, в которой движется рассматриваемое транспортное средство, из полученной информации изображений. Информация изображений, захватываемая посредством камеры 14, выводится в устройство 17 управления.
[0015] Устройство 15 ввода представляет собой рабочий элемент, который может управляться водителем. В настоящем варианте осуществления, водитель может управлять устройством 15 ввода, чтобы за счет этого задавать включение/выключение управления автоматизированным или автономным движением. При управлении автоматизированным или автономным движением транспортного средства согласно настоящему варианту осуществления, выполняется так называемое управление движением с удержанием на полосе движения, при котором рассматриваемое транспортное средство управляется с возможностью двигаться, например, вдоль центра полосы движения (области, заданной посредством разделительных линий), обнаруженного посредством камеры 14. Другое управление автоматизированным или автономным движением дополнительно может использоваться. Например, когда едущее впереди транспортное средство присутствует впереди рассматриваемого транспортного средства, может использоваться управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется с возможностью двигаться таким образом, что расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством поддерживается равным расстоянию между транспортными средствами, которое задается водителем, в то время как, когда едущее впереди транспортное средство не присутствует впереди рассматриваемого транспортного средства, может использоваться управление скоростью, при котором рассматриваемое транспортное средство управляется с возможностью двигаться со скоростью транспортного средства, которая задается водителем.
[0016] Приводной механизм 16 включает в себя двигатель и/или электромотор (систему подачи мощности), тормоз (тормозную систему) и актуатор рулевого управления (систему рулевого управления) для управления рассматриваемым транспортным средством с возможностью двигаться автоматизированным или автономным способом. В настоящем варианте осуществления, при выполнении управления автоматизированным или автономным движением, которое описывается ниже, устройство 17 управления управляет работой приводного механизма 16.
[0017] Устройство 17 управления состоит из постоянного запоминающего устройства (ROM), которое сохраняет программы для управления движением рассматриваемого транспортного средства, центрального процессора (CPU), который выполняет программы, сохраненные в ROM, и оперативного запоминающего устройства (RAM), которое служит в качестве доступного устройства хранения данных. В качестве замены или в дополнение к CPU, может использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п. в качестве функциональной схемы.
[0018] Устройство 17 управления выполняет программы, сохраненные в ROM, с использованием CPU, чтобы за счет этого достигать следующих функций: функции получения информации рассматриваемого транспортного средства для получения информации рассматриваемого транспортного средства относительно состояния движения рассматриваемого транспортного средства; функции получения информации полос движения для получения информации полос движения (включающей в себя целевую траекторию), полученной впереди рассматриваемого транспортного средства; функции задания расстояния до обозреваемой впереди точки для предварительного задания расстояния до обозреваемой впереди точки в соответствии с информацией полос движения и состоянием движения рассматриваемого транспортного средства; функции вычисления поперечного смещения обозреваемой впереди точки для вычисления поперечного смещения между текущей позицией рассматриваемого транспортного средства и предварительно заданной обозреваемой впереди точкой; функции оценки будущих траекторий рассматриваемого транспортного средства для оценки траектории движения рассматриваемого транспортного средства, если рассматриваемое транспортное средство движется из текущей позиции в предварительно заданную обозреваемую впереди точку; и функции управления движением (включающей в себя функцию удержания на полосе движения) для управления движением рассматриваемого транспортного средства. Ниже описываются эти функции устройства 17 управления.
[0019] Устройство 17 управления использует функцию получения информации рассматриваемого транспортного средства для того, чтобы получать информацию рассматриваемого транспортного средства относительно состояния движения рассматриваемого транспортного средства. Например, устройство 17 управления может использовать функцию получения информации рассматриваемого транспортного средства для того, чтобы получать, в качестве информации рассматриваемого транспортного средства, позиционную информацию рассматриваемого транспортного средства из устройства 11 обнаружения позиции рассматриваемого транспортного средства, и информацию скорости транспортного средства для рассматриваемого транспортного средства из датчика 13 скорости транспортного средства.
[0020] Устройство 17 управления использует функцию получения информации полос движения для того, чтобы получать информацию полос движения, которая включает в себя информацию относительно разделительных линий полосы движения, расположенной впереди рассматриваемого транспортного средства, и/или формы (к примеру, ширины дороги, радиуса кривизны и длины) полосы движения и другую информацию. Например, устройство 17 управления выполняет процесс преобразования в двоичную форму и т.п. для данных изображений из камеры 14, чтобы за счет этого обнаруживать разделительные линии полосы движения, расположенной впереди рассматриваемого транспортного средства, и указывает целевую траекторию, вдоль которой должно двигаться рассматриваемое транспортное средство. Целевая траектория, например, может представлять собой центральную линию полосы движения.
[0021] Устройство 17 управления использует функцию задания расстояния до обозреваемой впереди точки для того, чтобы предварительно задавать расстояние до обозреваемой впереди точки в соответствии с информацией полос движения, полученной с использованием функции получения информации полос движения, и состоянием движения рассматриваемого транспортного средства, полученным с использованием функции получения информации рассматриваемого транспортного средства. Фиг. 3 является графиком, иллюстрирующим пример взаимосвязи между расстоянием до обозреваемой впереди точки, которое предварительно задается с использованием функции задания расстояния до обозреваемой впереди точки, и скоростью транспортного средства для рассматриваемого транспортного средства. В настоящем варианте осуществления, расстояние до обозреваемой впереди точки предварительно задается большим по мере того, как текущая скорость транспортного средства для рассматриваемого транспортного средства увеличивается, и расстояние до обозреваемой впереди точки предварительно задается меньшим по мере того, как текущая скорость транспортного средства для рассматриваемого транспортного средства уменьшается. Например, при условии, что расстояние на одну секунду в будущем, когда рассматриваемое транспортное средство движется на текущей скорости транспортного средства, предварительно задается в качестве расстояния до обозреваемой впереди точки, расстояние до обозреваемой впереди точки предварительно задается равным 20 м, когда скорость транспортного средства составляет 20 м/с, и расстояние до обозреваемой впереди точки предварительно задается равным 30 м, когда скорость транспортного средства составляет 30 м/с. Предварительное задание расстояния до обозреваемой впереди точки иллюстрируется на фиг. 3 представляет собой просто пример, и способ управления движением и оборудование управления движением настоящего изобретения не ограничены примером предварительного задания, проиллюстрированным на чертеже. Например, предварительно определенное фиксированное значение может предварительно задаваться в качестве расстояния до обозреваемой впереди точки.
[0022] Устройство 17 управления использует функцию вычисления поперечного смещения обозреваемой впереди точки для того, чтобы вычислять поперечное смещение между текущей позицией рассматриваемого транспортного средства и позицией рассматриваемого транспортного средства, если рассматриваемое транспортное средство движется на предварительно заданное расстояние до обозреваемой впереди точки, на основе текущей позиции рассматриваемого транспортного средства, целевой траектории и позиции рассматриваемого транспортного средства, если рассматриваемое транспортное средство движется на вышеуказанное предварительно заданное расстояние до обозреваемой впереди точки вдоль целевой траектории. Устройство 17 управления также использует функцию вычисления поперечного смещения обозреваемой впереди точки для того, чтобы вычислять целевой угол поворота при рулении, при котором вычисленное поперечное смещение становится нулевым, т.е. при котором рассматриваемое транспортное средство совпадает с целевой траекторией в предварительно заданной обозреваемой впереди точке.
[0023] Устройство 17 управления использует функцию оценки будущих траекторий рассматриваемого транспортного средства и целевой угол поворота при рулении для того, чтобы оценивать траекторию движения рассматриваемого транспортного средства, при которой рассматриваемое транспортное средство совпадает с целевой траекторией, полученной с использованием функции получения информации полос движения в предварительно заданной обозреваемой впереди точке, если рассматриваемое транспортное средство движется на расстояние до обозреваемой впереди точки, которое предварительно задается с использованием вышеуказанной функции задания расстояния до обозреваемой впереди точки. Эта оценка траектории движения рассматриваемого транспортного средства может выполняться, например, с использованием модели по принципу точек на траектории в направлении взгляда (модели управления, в которой руль поворачивается таким образом, что разделение между обозреваемой впереди точкой и целевой траекторией становится небольшим).
[0024] Устройство 17 управления также использует функцию оценки будущих траекторий рассматриваемого транспортного средства для того, чтобы определять максимальное значение поперечного смещения между оцененной траекторией движения рассматриваемого транспортного средства и целевой траекторией во время движения из текущей позиции рассматриваемого транспортного средства в обозреваемую впереди точку. Фиг. 5 является видом сверху, иллюстрирующим окружение для описания максимального значения Δdmax поперечного смещения Δd между оцененной траекторией PP движения рассматриваемого транспортного средства и целевой траекторией OP. На чертеже, рассматриваемое транспортное средство V движется по целевой траектории OP к верхней стороне чертежа. Вышеописанная функция задания расстояния до обозреваемой впереди точки служит для того, чтобы предварительно задавать обозреваемую впереди точку P1 на целевой траектории, вычислять целевой угол поворота при рулении на основе поперечного смещения между текущей позицией P0 рассматриваемого транспортного средства и предварительно заданной обозреваемой впереди точкой P1 и получать оцененную будущую траекторию PP рассматриваемого транспортного средства с использованием целевого угла поворота при рулении. В этом состоянии, как проиллюстрировано на фиг. 5, поперечное смещение Δd между оцененной траекторией PP движения рассматриваемого транспортного средства V и целевой траекторией OP во время движения из текущей позиции P0 рассматриваемого транспортного средства в предварительно заданную обозреваемую впереди точку P1 означает расстояние между целевой траекторией OP и оцененной траекторией PP в поперечном направлении транспортного средства, когда рассматриваемое транспортное средство V движется по целевой траектории OP. Определенное число значений этого поперечного смещения Δd вычисляется с предварительно определенным интервалом, например, как проиллюстрировано на чертеже, и максимальное значение Δdmax получается из этих значений. Интервал при вычислении поперечного смещения Δd не ограничен конкретным образом и предпочтительно может задаваться с учетом баланса между точностью в максимальном значении Δdmax и вычислительной нагрузкой, поскольку по мере того, как интервал уменьшается, точность максимального значения Δdmax повышается, но вычислительная нагрузка становится высокой.
[0025] Устройство 17 управления использует функцию оценки будущих траекторий рассматриваемого транспортного средства для того, чтобы определенно задавать расстояние до обозреваемой впереди точки, когда максимальное значение Δdmax поперечного смещения составляет предварительно определенное значение D или меньше, в качестве фактического расстояния до обозреваемой впереди точки. При этом определенном задании, когда максимальное значение Δdmax поперечного смещения между целевой траекторией и траекторией движения рассматриваемого транспортного средства, оцененное на основе предварительно заданного расстояния до обозреваемой впереди точки, превышает предварительно определенное значение D до тех пор, пока максимальное значение Δdmax поперечного смещения не станет предварительно определенным значением D или меньше, расстояние L1 до обозреваемой впереди точки (расстояние между P0 и P1), которое должно предварительно задаваться, последовательно изменяется ("P1 --> P2 --> P3"), и траектория PP движения рассматриваемого транспортного средства оценивается снова для каждого из расстояний L2 (расстояния между P0 и P2) и L3 (расстояния между P0 и P3)до обозреваемой впереди точки, которые в силу этого изменяются и задаются снова. Хотя не ограничено конкретным образом, при последовательном изменении расстояния до обозреваемой впереди точки, которое должно предварительно задаваться, предпочтительно последовательно уменьшать расстояние до обозреваемой впереди точки, которое должно предварительно задаваться.
[0026] По мере того, как расстояние до обозреваемой впереди точки от текущей позиции рассматриваемого транспортного средства до обозреваемой впереди точки задается меньшим, операция рассматриваемого транспортного средства подвержена быстрому следованию целевой траектории при наблюдении окрестности рассматриваемого транспортного средства; в силу этого способность к следованию целевой траектории является хорошей, но целевой угол поворота при рулении и/или поведение транспортного средства могут быть слишком чувствительными и неустойчивыми, так что акцентируется только текущее поперечное смещение. Напротив, задание расстояния до обозреваемой впереди точки дольше приводит к операции, в которой достаточно восстанавливать целевую траекторию после расстояния до обозреваемой впереди точки; в силу этого устойчивый целевой угол поворота при рулении и/или поведение транспортного средства могут получаться посредством управления оценкой, которое учитывает не только поперечное смещение из целевой траектории, но также и направление и/или угловую скорость относительно вертикальной оси рассматриваемого транспортного средства относительно целевой траектории, но способность к следованию целевой траектории может быть медленной. С учетом вышеизложенного, в настоящем варианте осуществления, при выполнении управления удержанием на полосе движения в модели по принципу точек на траектории в направлении взгляда, расстояние до обозреваемой впереди точки надлежащим образом задается таким образом, чтобы балансировать быструю способность к следованию целевой траектории и стабильность поведения транспортного средства.
[0027] Таким образом, при предварительном задании, расстояние до обозреваемой впереди точки выбирается в соответствии с информацией полос движения и скоростью транспортного средства для рассматриваемого транспортного средства, обозреваемая впереди точка P1, которая должна предварительно задаваться, последовательно изменяется до меньшего значения ("P1 --> P2 --> P3") до тех пор, пока максимальное значение Δdmax поперечного смещения Δd между целевой траекторией OP и траекторией PP движения рассматриваемого транспортного средства V, оцененное на основе предварительно заданного расстояния до обозреваемой впереди точки, не станет предварительно определенным значением D или меньше, и расстояние до обозреваемой впереди точки, когда максимальное значение Δdmax поперечного смещения становится предварительно определенным значением D или меньше, определенно задается в качестве фактического расстояния до обозреваемой впереди точки. Таким образом, расстояние до обозреваемой впереди точки, которое должно определенно задаваться, представляет собой максимальное расстояние из определенного числа значений расстояния до обозреваемой впереди точки, при котором максимальное значение Δdmax поперечного смещения между целевой траекторией OP и траекторией PP движения рассматриваемого транспортного средства, оцененное на основе предварительно заданного расстояния до обозреваемой впереди точки, становится предварительно определенным значением или меньше. Как результат, расстояние до обозреваемой впереди точки, которое должно определенно задаваться, составляет значение, которое обеспечивает возможность оптимального балансирования быстрой способности к следованию целевой траектории и стабильности поведения транспортного средства.
[0028] Устройство 17 управления использует функцию управления движением для того, чтобы управлять приводным механизмом 16, чтобы за счет этого выполнять управление автоматизированным или автономным движением, при котором все или часть движения рассматриваемого транспортного средства выполняется автоматизированным или автономным способом. Например, функция управления движением в настоящем варианте осуществления служит для того, чтобы управлять работой приводного механизма 16, такого как двигатель, тормозной актуатор и актуатор рулевого управления, чтобы за счет этого выполнять управление удержанием на полосе движения, при котором рассматриваемое транспортное средство управляется с возможностью двигаться по целевой траектории. Когда едущее впереди транспортное средство присутствует впереди рассматриваемого транспортного средства, функция управления движением может служить для того, чтобы управлять работой приводного механизма 16, такого как двигатель и тормоз, чтобы за счет этого выполнять управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется с возможностью двигаться таким образом, что оно отделяется от едущего впереди транспортного средства на расстояние между транспортными средствами, которое задается с использованием функции задания расстояния между транспортными средствами. Помимо этого или альтернативно, когда едущее впереди транспортное средство присутствует впереди рассматриваемого транспортного средства, либо когда едущее впереди транспортное средство не присутствует впереди рассматриваемого транспортного средства, функция управления движением может служить для того, чтобы управлять работой приводного механизма 16, такого как двигатель и тормоз, чтобы за счет этого выполнять управление скоростью, в котором рассматриваемое транспортное средство управляется с возможностью двигаться при определенной скорости транспортного средства, которая задается водителем.
[0029] Далее описывается процесс управления движением настоящего варианта осуществления. Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно настоящему варианту осуществления. Процесс управления движением, описанный ниже, выполняется посредством устройства 17 управления. Процесс управления движением, описанный ниже, начинается, когда переключатель зажигания или переключатель мощности включается, и многократно выполняется с предварительно определенным периодом (например, каждые 10 мс) до тех пор, пока переключатель зажигания или переключатель мощности не выключается. Нижеприведенное описание основано на примерном окружении, в котором управление движением с удержанием на полосе движения вводится (включается) водителем.
[0030] На этапе S1, функция получения информации рассматриваемого транспортного средства устройства 17 управления в первую очередь служит для того, чтобы выполнять получение информации рассматриваемого транспортного средства относительно состояния движения рассматриваемого транспортного средства. Например, функция получения информации рассматриваемого транспортного средства может служить для того, чтобы получать, в качестве информации рассматриваемого транспортного средства, позиционную информацию рассматриваемого транспортного средства из устройства 11 обнаружения позиции рассматриваемого транспортного средства и информацию скорости транспортного средства для рассматриваемого транспортного средства из датчика 13 скорости транспортного средства. Затем функция задания расстояния до обозреваемой впереди точки устройства 17 управления служит для того, чтобы предварительно задавать обозреваемую впереди точку P1 (см. левую часть по фиг. 4) на основе текущей позиции рассматриваемого транспортного средства, информации полос движения и скорости транспортного средства для рассматриваемого транспортного средства, например, как проиллюстрировано на фиг. 3. Предварительное задание, как упомянуто в данном документе, должно выполняться для вычисления для предварительного получения оптимального расстояния до обозреваемой впереди точки, а не для получения расстояния до обозреваемой впереди точки, которое используется при фактическом управлении движением с удержанием на полосе движения.
[0031] На этапе S2, данные изображений, захваченные посредством камеры 14 впереди рассматриваемого транспортного средства, обрабатываются, и позиционная взаимосвязь между рассматриваемым транспортным средством и полосой движения обнаруживается, чтобы получать целевую траекторию. Таким образом, функция получения информации полос движения устройства 17 управления служит для того, чтобы обнаруживать разделительные линии полосы движения, расположенной впереди рассматриваемого транспортного средства, и указывать целевую траекторию, вдоль которой должно двигаться рассматриваемое транспортное средство. Целевая траектория, например, представляет собой центральную линию полосы движения. Затем поперечное смещение вычисляется между текущей позицией P0 рассматриваемого транспортного средства и позицией P1 рассматриваемого транспортного средства, если рассматриваемое транспортное средство движется на расстояние до обозреваемой впереди точки, которое предварительно задается на этапе S1. Опорное значение для позиции рассматриваемого транспортного средства, например, может представлять собой центральную ось кузова транспортного средства.
[0032] На этапе S3, целевой угол поворота при рулении, при котором позиция рассматриваемого транспортного средства совпадает с целевой траекторией в обозреваемой впереди точке P1, вычисляется из поперечного смещения между целевой траекторией в обозреваемой впереди точке P1, полученной на этапе S2, и текущей позицией рассматриваемого транспортного средства. Затем на этапе S4, функция оценки будущих траекторий рассматриваемого транспортного средства устройства 17 управления служит для того, чтобы использовать модель по принципу точек на траектории в направлении взгляда и т.п. для того, чтобы оценивать траекторию движения рассматриваемого транспортного средства, если рассматриваемое транспортное средство управляется с целевым углом поворота при рулении, вычисленным на этапе S3 (см. "оцененная будущая траектория PP рассматриваемого транспортного средства" в левой части по фиг. 4).
[0033] На этапе S5, функция оценки будущих траекторий рассматриваемого транспортного средства устройства 17 управления служит для того, чтобы определять максимальное значение Δdmax поперечного смещения между оцененной траекторией PP движения рассматриваемого транспортного средства и целевой траекторией OP во время движения из текущей позиции P0 рассматриваемого транспортного средства в предварительно заданную обозреваемую впереди точку P1. Этот способ обнаружения может включать в себя вычисление определенного числа значений поперечного смещения Δd с предварительно определенным интервалом, как проиллюстрировано на фиг. 5, например, и получение максимального значения Δdmax из этих значений. Затем выполняется определение в отношении того, составляет либо нет максимальное значение Δdmax поперечного смещения предварительно определенное значение D или меньше. Это предварительно определенное значение D может предварительно получаться посредством экспериментов и/или моделирований в качестве значения, которое обеспечивает возможность осуществления управления удержанием на полосе движения, в котором сбалансированы быстрая способность к следованию целевой траектории и стабильность поведения транспортного средства.
[0034] Когда, на этапе S5, максимальное значение Δdmax поперечного смещения составляет предварительно определенное значение D или меньше, процесс переходит к этапу S7, на котором расстояние до обозреваемой впереди точки (расстояние между P0 и P1 в данном документе), предварительно заданное в этот раз, определенно задается в качестве фактического расстояния до обозреваемой впереди точки. С другой стороны, когда, на этапе S5, максимальное значение Δdmax поперечного смещения не составляет предварительно определенное значение D или меньше, процесс переходит к этапу S6, на котором расстояние до обозреваемой впереди точки изменяется на расстояние до обозреваемой впереди точки между P0 и P2, которое меньше расстояния до обозреваемой впереди точки между P0 и P1, предварительно заданного в настоящий момент.
[0035] Средняя часть по фиг. 4 является видом сверху, иллюстрирующим окружение, в котором расстояние до обозреваемой впереди точки изменяется на расстояние до обозреваемой впереди точки между P0 и P2, которое меньше расстояния до обозреваемой впереди точки между P0 и P1, предварительно заданного в прошлый раз. После того, как расстояние до обозреваемой впереди точки изменяется на расстояние до обозреваемой впереди точки между P0 и P2, как проиллюстрировано в средней части по фиг. 4, процесс возвращается к этапу S2, на котором поперечное смещение для расстояния до обозреваемой впереди точки P2 и целевой угол поворота при рулении, соответствующий ему, вычисляются снова, и будущая траектория PP движения рассматриваемого транспортного средства оценивается снова. Затем, как проиллюстрировано на фиг. 5, определенное число значений поперечного смещения Δd вычисляется с предварительно определенным интервалом, и максимальное значение Δdmax получается из этих значений. Здесь, когда максимальное значение Δdmax поперечного смещения составляет предварительно определенное значение D или меньше, процесс переходит к этапу S7, на котором расстояние до обозреваемой впереди точки (расстояние между P0 и P2 в данном документе), предварительно заданное в этот раз, определенно задается в качестве фактического расстояния до обозреваемой впереди точки.
[0036] С другой стороны, когда, на этапе S5, максимальное значение Δdmax поперечного смещения не составляет предварительно определенное значение D или меньше, процесс переходит к этапу S6, на котором расстояние до обозреваемой впереди точки изменяется на расстояние до обозреваемой впереди точки между P0 и P3, которое меньше расстояния до обозреваемой впереди точки между P0 и P2, предварительно заданного в настоящий момент, и процесс возвращается к этапу S2. Процесс этапов S2-S5 повторяется до тех пор, пока максимальное значение Δdmax поперечного смещения не станет предварительно определенным значением D или меньше. Правая часть по фиг. 4 является видом сверху, иллюстрирующим окружение, в котором расстояние до обозреваемой впереди точки изменяется на расстояние до обозреваемой впереди точки между P0 и P3, которое меньше расстояния до обозреваемой впереди точки между P0 и P2, предварительно заданного в прошлый раз.
[0037] В вышеприведенном описании, расстояние до обозреваемой впереди точки, которое должно предварительно задаваться, последовательно уменьшается для выбора, как проиллюстрировано на фиг. 4 в порядке "левая часть --> средняя часть --> правая часть". В альтернативном варианте осуществления, позиция P4 на целевой траектории OP (см. фиг. 5 на предмет подробностей), в которой поперечное смещение между целевой траекторией OP и траекторией PP движения рассматриваемого транспортного средства, оцененное в левой части по фиг. 4, составляет максимальное значение Δdmax, может использоваться в качестве расстояния P3 до обозреваемой впереди точки, которое должно предварительно задаваться в следующий раз. Это обусловлено тем, что когда расстояние до обозреваемой впереди точки между P0 и P1, предварительно заданное в левой части по фиг. 4, изменяется непосредственно на расстояние до обозреваемой впереди точки между P0 и P4, по меньшей мере, вероятность становления предварительно определенным значением D или меньше увеличивается по сравнению с тем, когда расстояние до обозреваемой впереди точки, которое должно предварительно задаваться, последовательно уменьшается для выбора, как проиллюстрировано на фиг. 4 в порядке "левая часть --> средняя часть --> правая часть", и число вычислений в силу этого может уменьшаться.
[0038] Фиг. 6 иллюстрирует состояние, в котором рассматриваемое транспортное средство собирается начинать движение по дуге, имеющей небольшой радиус кривизны, из полосы движения по прямой. При движении в полосе движения по прямой, ось кузова транспортного средства для транспортного средства V совпадает с направлением движения транспортного средства V, но по мере того, как начинается движение при повороте, возникает угол скольжения между осью кузова транспортного средства для транспортного средства V и направлением движения транспортного средства, и они не обязательно могут совпадать друг с другом. При въезде на относительно низкой скорости из прямой линии в дугу, имеющую небольшой радиус R кривизны, как и в случае въезда на въезд перекрестка, если транспортное средство управляется с возможностью двигаться с целевым углом поворота при рулении, который заставляет траекторию транспортного средства совпадать с целевой траекторией в обозреваемой впереди точке P1, траектория транспортного средства имеет тенденцию значительно отклоняться от целевой траектории к внутренней части поворота (имеет тенденцию представлять собой проезд по сокращенному пути).
[0039] Если целевой угол поворота при рулении вычисляется на основе начального заданного значения расстояния до обозреваемой впереди точки, которое задается просто в соответствии со скоростью транспортного средства и т.п., расстояние до обозреваемой впереди точки между P0 и P1 должно предоставляться без рассмотрения максимальной ошибки между траекторией транспортного средства и целевой траекторией, которая учитывается в настоящем варианте осуществления. Следовательно, когда форма целевой траектории усложняется, и/или когда изменение кривизны является большим, величина отклонения к внутренней части поворота, возможно, может иметь большое значение, которое не может игнорироваться, и трудности заключаются в том, что рассматриваемое транспортное средство может выезжать за пределы полосы движения, и/или колеса могут ненадлежащим образом приближаться вплотную к бордюрным камням.
[0040] Как проиллюстрировано на фиг. 7, противоположная проблема может возникать при выезде из дуги, имеющей небольшой радиус R кривизны, к полосе движения по прямой, как и в случае движения через выезд перекрестка. Таким образом, радиус R кривизны дороги увеличивается к полосе движения по прямой во время движения с большим углом скольжения вдоль целевой траектории на дуге, имеющей небольшой радиус R кривизны. Это уменьшает целевой угол поворота при рулении, и угол скольжения также варьируется до небольшого значения, так что направление движения транспортного средства выступает наружу относительно целевой траектории по мере того, как транспортное средство движется от выезда дуги к прямому участку, и транспортное средство может ехать по окружному пути.
[0041] В отличие от вышеуказанного, в настоящем варианте осуществления, до того, как фактическое расстояние до обозреваемой впереди точки, используемое для управления движением с удержанием на полосе движения, задается, траектория PP движения рассматриваемого транспортного средства оценивается для предварительно заданного расстояния до обозреваемой впереди точки, и соответствующее расстояние до обозреваемой впереди точки ищется до тех пор, пока максимальное значение Δdmax поперечного смещения между оцененной траекторией PP движения рассматриваемого транспортного средства и целевой траекторией OP не станет предварительно определенным значением D или меньше. Через эту операцию, расстояние до обозреваемой впереди точки, которое должно фактически задаваться, уже оптимизировано. Как результат, рассматриваемое транспортное средство может надлежащим образом управляться с возможностью двигаться автоматизированным или автономным способом вдоль целевой траектории без проезда по сокращенному пути или по окружному пути относительно целевой траектории.
[0042] Кроме того, в настоящем варианте осуществления, расстояние до обозреваемой впереди точки, которое должно определенно задаваться, представляет собой расстояние между P0 и P4 в позицию P4 на целевой траектории, в которой поперечное смещение между целевой траекторией OP и траекторией PP движения рассматриваемого транспортного средства, оцененное на основе предварительно заданного расстояния до обозреваемой впереди точки, составляет максимальное значение Δdmax. Таким образом, вероятность того, что максимальное значение Δdmax поперечного смещения становится предварительно определенным значением D или меньше, является высокой, даже когда вычисление поперечного смещения между целевой траекторией и оцененной траекторией рассматриваемого транспортного средства выполняется только однократно. Как результат, итеративное вычисление не требуется, и может уменьшаться вычислительная нагрузка.
[0043] Кроме того, в настоящем варианте осуществления, расстояние до обозреваемой впереди точки, которое должно определенно задаваться, представляет собой максимальное расстояние из определенного числа значений расстояния до обозреваемой впереди точки, при котором максимальное значение Δdmax поперечного смещения между целевой траекторией OP и траекторией PP движения рассматриваемого транспортного средства, оцененное на основе предварительно заданного расстояния до обозреваемой впереди точки, составляет предварительно определенное значение D или меньше. Расстояние до обозреваемой впереди точки, которое должно определенно задаваться, в силу этого составляет значение, которое обеспечивает возможность оптимального балансирования быстрой способности к следованию целевой траектории и стабильности поведения транспортного средства.
[0044] Кроме того, в настоящем варианте осуществления, когда максимальное значение Δdmax поперечного смещения превышает предварительно определенное значение D до тех пор, пока максимальное значение Δdmax поперечного смещения не станет предварительно определенным значением D или меньше, расстояние до обозреваемой впереди точки, которое должно предварительно задаваться, последовательно изменяется (например, последовательно изменяется на меньшее значение), и траектория движения рассматриваемого транспортного средства оценивается снова для каждого из расстояний до обозреваемой впереди точки, которые в силу этого изменяются и задаются снова. Таким образом, вычисление поперечного смещения между целевой траекторией OP и оцененной траекторией PP рассматриваемого транспортного средства может выполняться посредством конечного числа итеративных вычислений. Кроме того, максимальное значение Δdmax поперечного смещения между целевой траекторией OP и оцененной траекторией PP рассматриваемого транспортного средства используется в качестве индекса оценки для управления движением с удержанием на полосе движения, и в силу этого можно обеспечивать то, что максимальное значение Δdmax поперечного смещения становится предварительно определенным значением D или меньше.
[0045] Вышеописанное устройство 17 управления соответствует контроллеру настоящего изобретения.
Описание номеров ссылок
[0046] 10 - оборудование управления движением
11 - устройство обнаружения позиции рассматриваемого транспортного средства
12 - картографическая база данных
13 - датчик скорости транспортного средства
14 - камера
15 - устройство ввода
16 - приводной механизм
17 - устройство управления
V - рассматриваемое транспортное средство
OP - целевая траектория
PP - оцененная будущая траектория рассматриваемого транспортного средства
P1, P2, P3 - обозреваемая впереди точка
Δd - поперечное смещение между целевой траекторией и оцененной траекторией рассматриваемого транспортного средства
Δdmax - максимальное значение поперечного смещения между целевой траекторией и оцененной траекторией рассматриваемого транспортного средства.
Реферат
Изобретение относится к способу управления движением. Способ управления движением для транспортного средства, в котором обнаруживается целевая траектория и рассматриваемое транспортное средство управляется, чтобы двигаться автономным способом. Способ управления движением для транспортного средства содержит этапы, на которых предварительно задают расстояние до обозреваемой впереди точки от рассматриваемого транспортного средства до обозреваемой впереди точки, оценивают траекторию движения рассматриваемого транспортного средства, при которой рассматриваемое транспортное средство совпадает с целевой траекторией в обозреваемой впереди точке, если рассматриваемое транспортное средство движется на предварительно заданное расстояние до обозреваемой впереди точки. При этом определяет максимальное значение поперечного смещения между оцененной траекторией движения рассматриваемого транспортного средства и целевой траекторией и задают расстояние до обозреваемой впереди точки и затем управляют рассматриваемым транспортным средством, чтобы двигаться автономным способом на основе определенно заданного расстояния до обозреваемой впереди точки. Достигается безопасное удержание транспортного средства на полосе движения. 2 н. и 4 з.п. ф-лы, 7 ил.
Комментарии