Способ помощи при парковке и устройство помощи при парковке - RU2714656C1
Код документа: RU2714656C1
Чертежи
Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при парковке и к устройству помощи при парковке.
Уровень техники
[0002] Технология для регулирования позиции для парковки с использованием удаленного оперативного устройства за пределами салона транспортного средства описывается в PTL 1.
Список библиографических ссылок
Патентные документы
[0003] PTL 1. JP 2006-306233 A
Сущность изобретения
Техническая задача
[0004] Когда ситуация связи между оперативным устройством, существующим за пределами транспортного средства, и транспортным средством является плохой, скорость обмена данными между оперативным устройством и транспортным средством уменьшается. Таким образом, работоспособность оперативного устройства иногда ухудшается вследствие уменьшения скорости обмена данными. Вышеприведенное ухудшение работоспособности оперативного устройства возникает, поскольку поступление сигнала инструкции, соответствующего операции, выполняемой в оперативном устройстве, задерживается, например, вследствие уменьшения скорости обмена данными.
[0005] Например, когда поступление сигнала инструкции задерживается, скорость отклика для операции, выполняемой в оперативном устройстве, уменьшается. Таким образом, оператор ошибочно полагает, что операция не принимается, и иногда повторяет идентичную операцию. Следовательно, выполняется избыточная операция, в силу этого приводя к результату, который не подразумевает оператор, и оператор ощущает неудобство в обращении с оперативным устройством.
Как описано выше, ухудшение работоспособности оперативного устройства возможно вызывает ощущение дискомфорта у оператора.
Задача настоящего изобретения заключается в том, чтобы, когда целевая позиция для парковки регулируется вручную в оперативном устройстве, выполненном с возможностью парковать транспортное средство посредством удаленной операции, уменьшать ощущение дискомфорта, которое испытывает оператор вследствие ухудшения работоспособности оперативного устройства в ассоциации с ухудшением характеристик в ситуации связи между оперативным устройством и транспортным средством.
Решение задачи
[0006] Согласно одному аспекту настоящего изобретения, предусмотрен способ помощи при парковке для приема операции оператором из-за пределов транспортного средства и выполнения автоматической парковки в целевой позиции для парковки, причем способ помощи при парковке включает в себя: определение ситуации связи между оперативным устройством, выполненным с возможностью принимать операцию и передавать сигнал инструкции, соответствующий операции, и устройством связи, смонтированным на транспортном средстве и выполненным с возможностью принимать сигнал инструкции; и ограничение операции для регулирования вручную целевой позиции для парковки в оперативном устройстве в зависимости от ситуации связи.
Краткое описание чертежей
[0008] Фиг. 1 является схемой, иллюстрирующей пример конфигурации транспортного средства, включающего в себя устройство помощи при парковке согласно вариантам осуществления;
Фиг. 2 является блок-схемой, иллюстрирующей пример функциональной конфигурации схемы управления транспортного средства;
Фиг. 3A является схемой, иллюстрирующей первый пример экрана выбора парковочной рамки;
Фиг. 3B является схемой, иллюстрирующей первый пример экрана регулирования целевой позиции для парковки;
Фиг. 4 является пояснительной схемой способа определения риска сбоя связи;
Фиг. 5 является блок-схемой, иллюстрирующей пример функциональной конфигурации оперативного устройства;
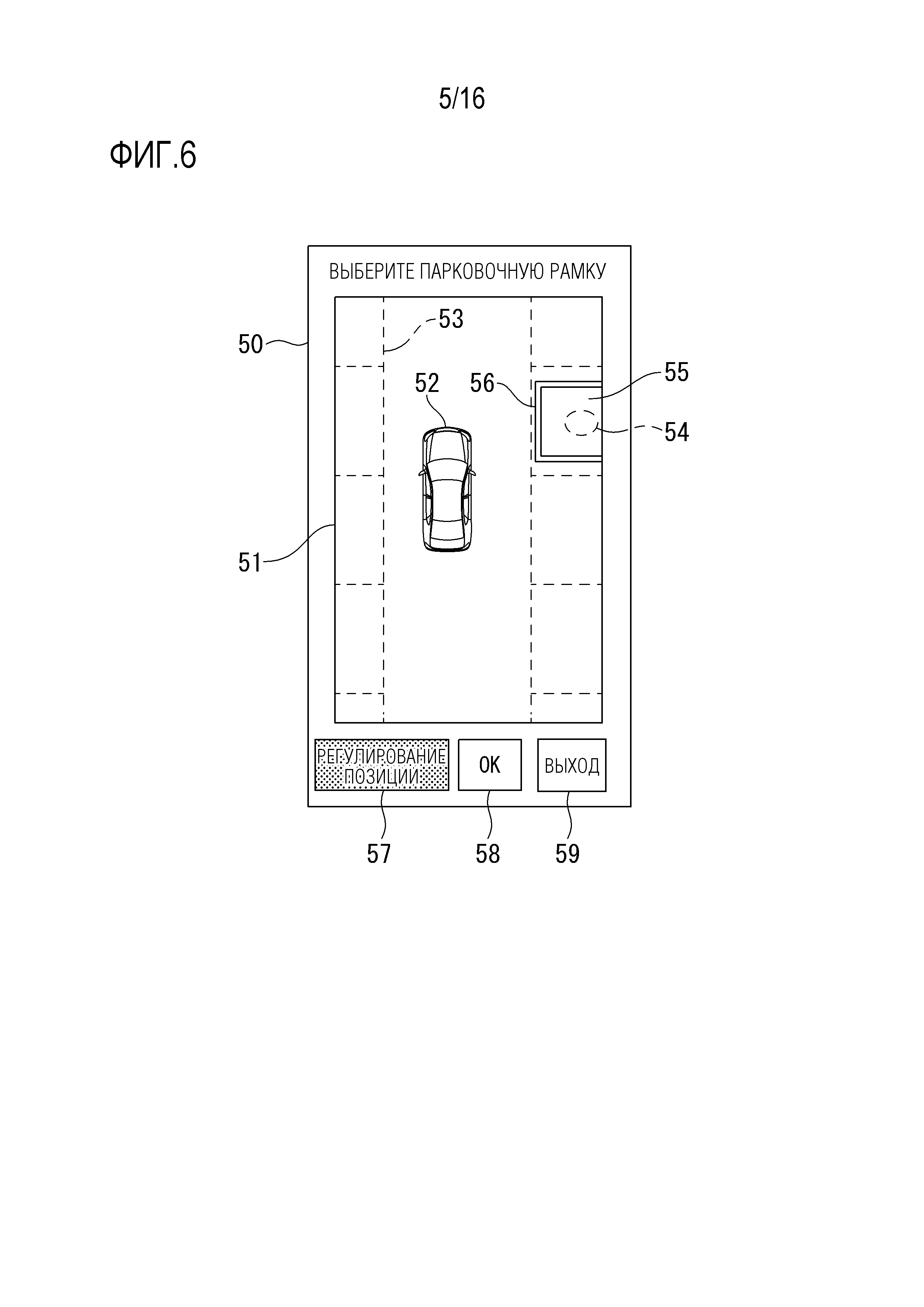
Фиг. 6 является схемой, иллюстрирующей второй пример экрана выбора парковочной рамки;
Фиг. 7 является блок-схемой последовательности операций примера способа помощи при парковке согласно первому варианту осуществления;
Фиг. 8 является пояснительной схемой первого примера задания пиксельного разрешения второго изображения окружения, которое должно передаваться в оперативное устройство из транспортного средства;
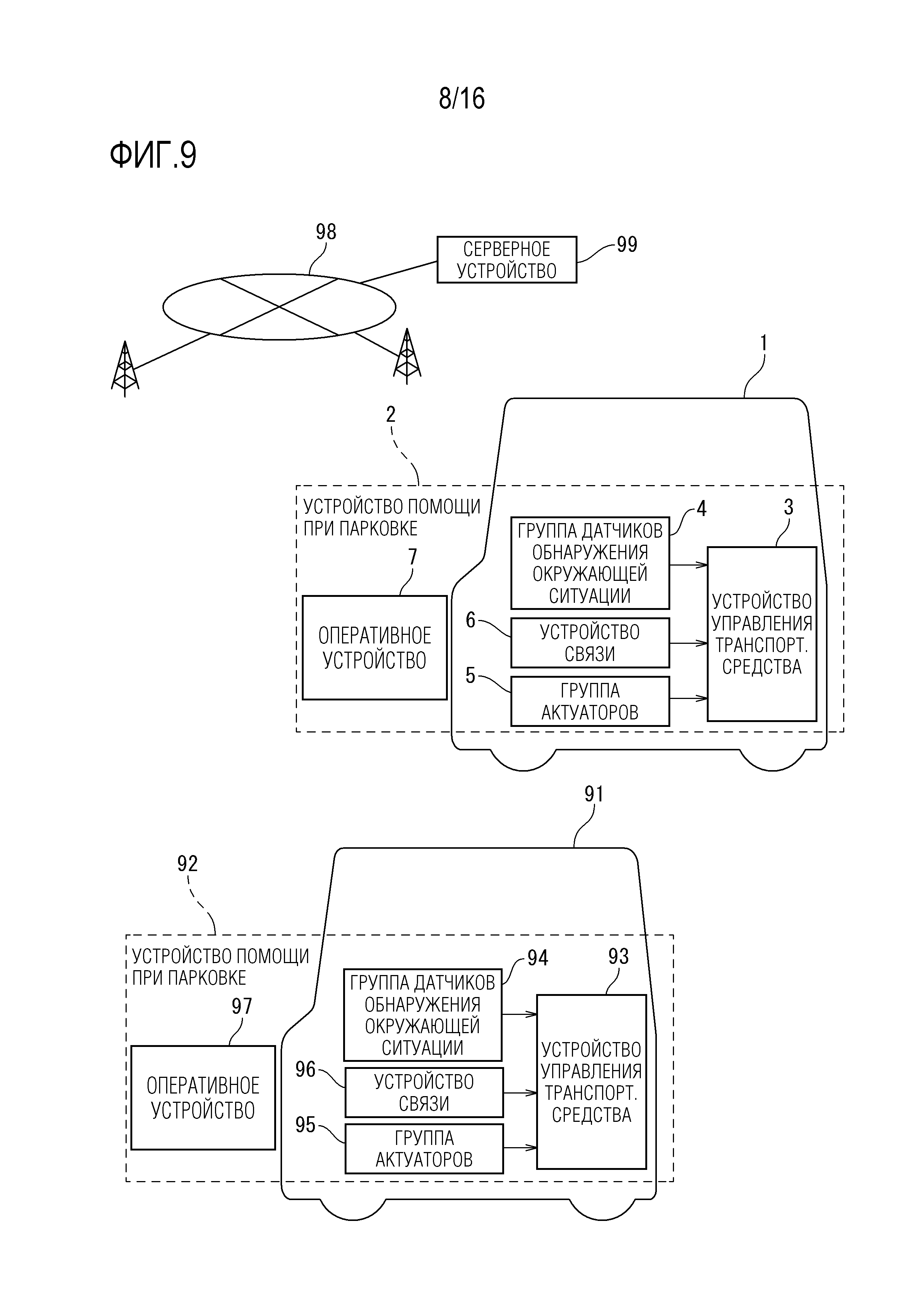
Фиг. 9 является пояснительной схемой способа определения риска сбоя связи во втором варианте осуществления;
Фиг. 10A является блок-схемой последовательности операций (часть 1) примера способа помощи при парковке согласно второму варианту осуществления;
Фиг. 10B является блок-схемой последовательности операций (часть 2) примера способа помощи при парковке согласно второму варианту осуществления;
Фиг. 11A является схемой, иллюстрирующей третий пример экрана выбора парковочной рамки;
Фиг. 11B является схемой, иллюстрирующей второй пример экрана регулирования целевой позиции для парковки;
Фиг. 12A является схемой, иллюстрирующей третий пример экрана регулирования целевой позиции для парковки;
Фиг. 12B является схемой, иллюстрирующей четвертый пример экрана регулирования целевой позиции для парковки;
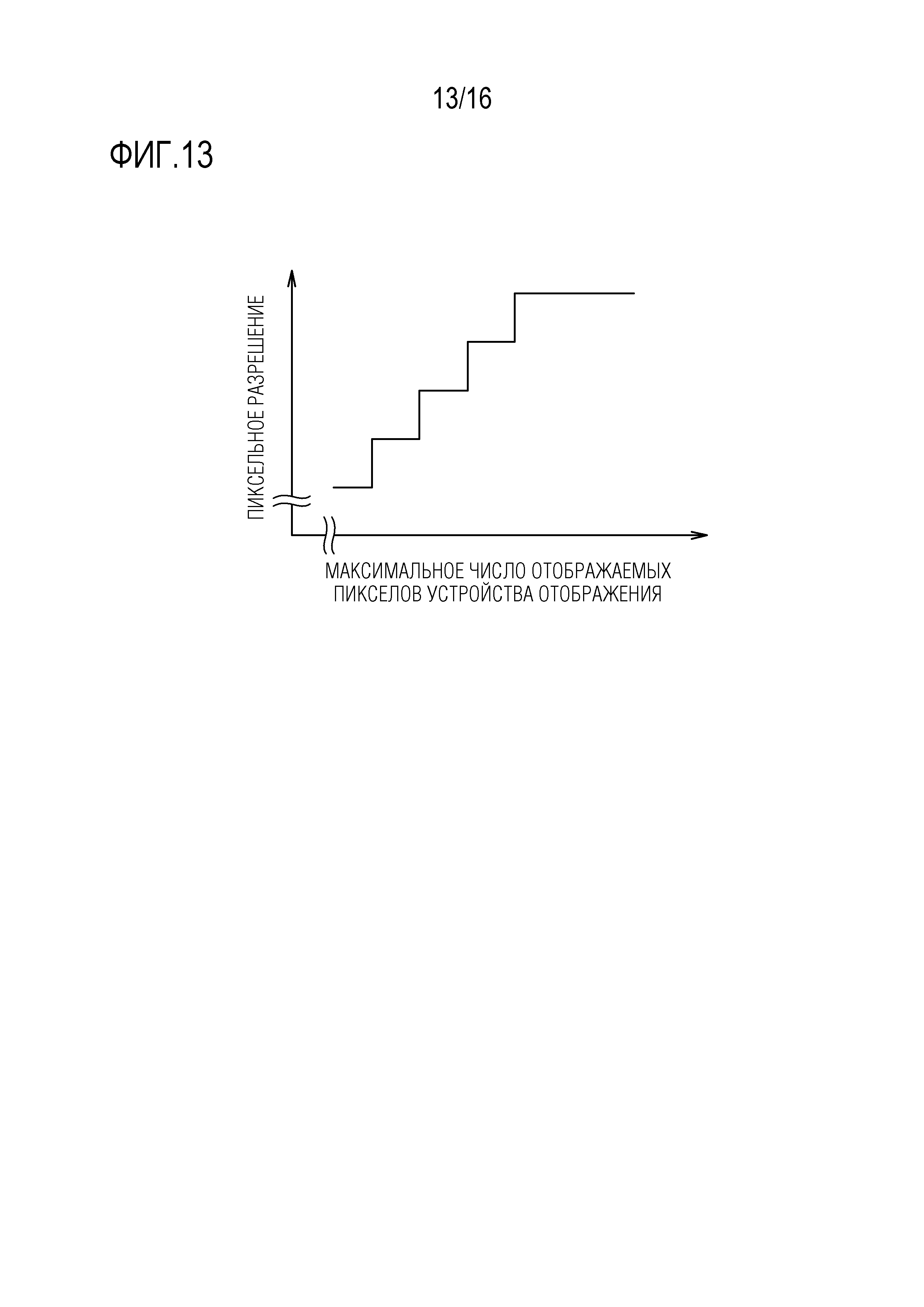
Фиг. 13 является пояснительной схемой второго примера задания пиксельного разрешения второго изображения окружения, которое должно передаваться в оперативное устройство из транспортного средства;
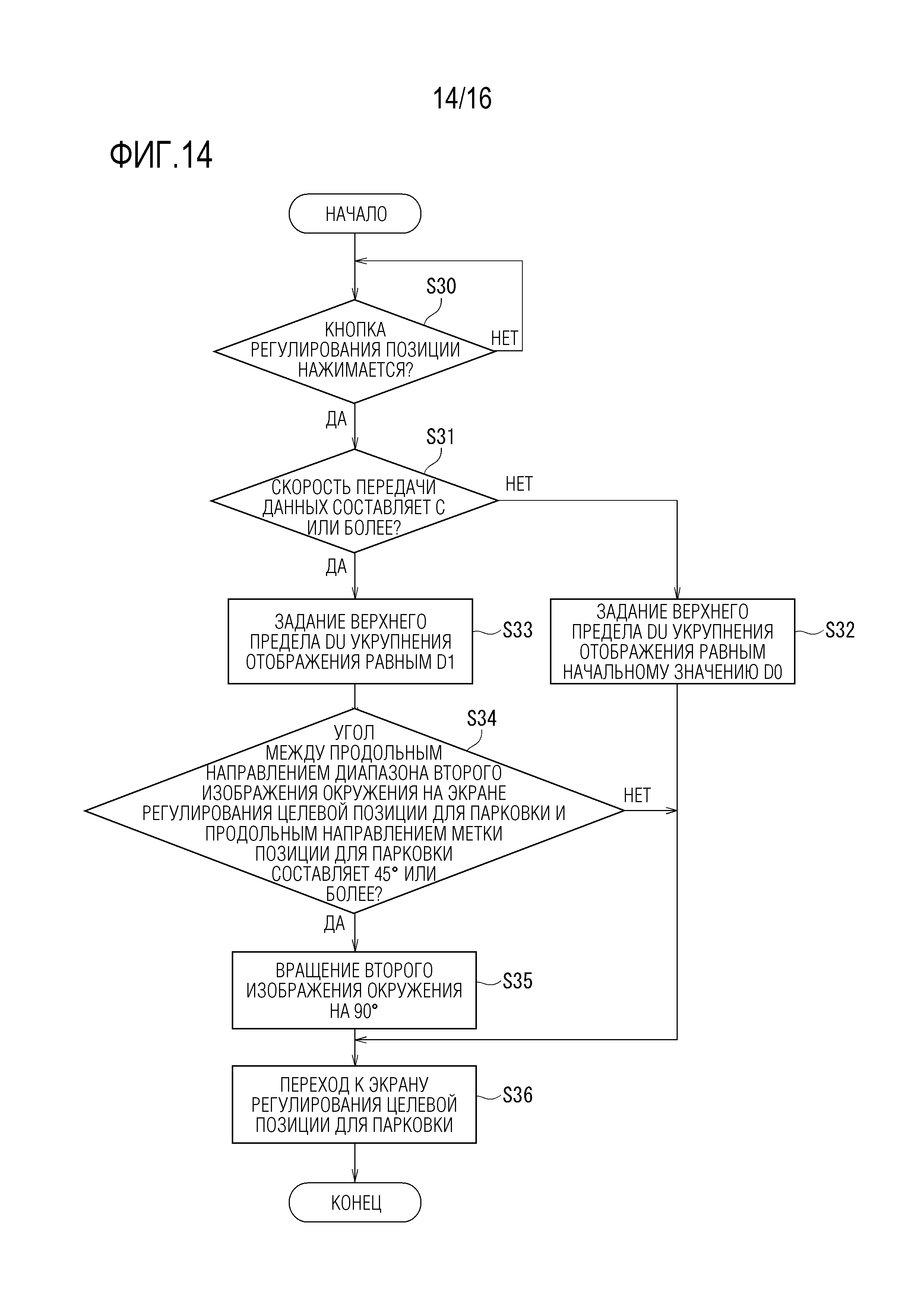
Фиг. 14 является пояснительной схемой примера процесса, когда кнопка регулирования позиции экрана выбора парковочной рамки нажимается;
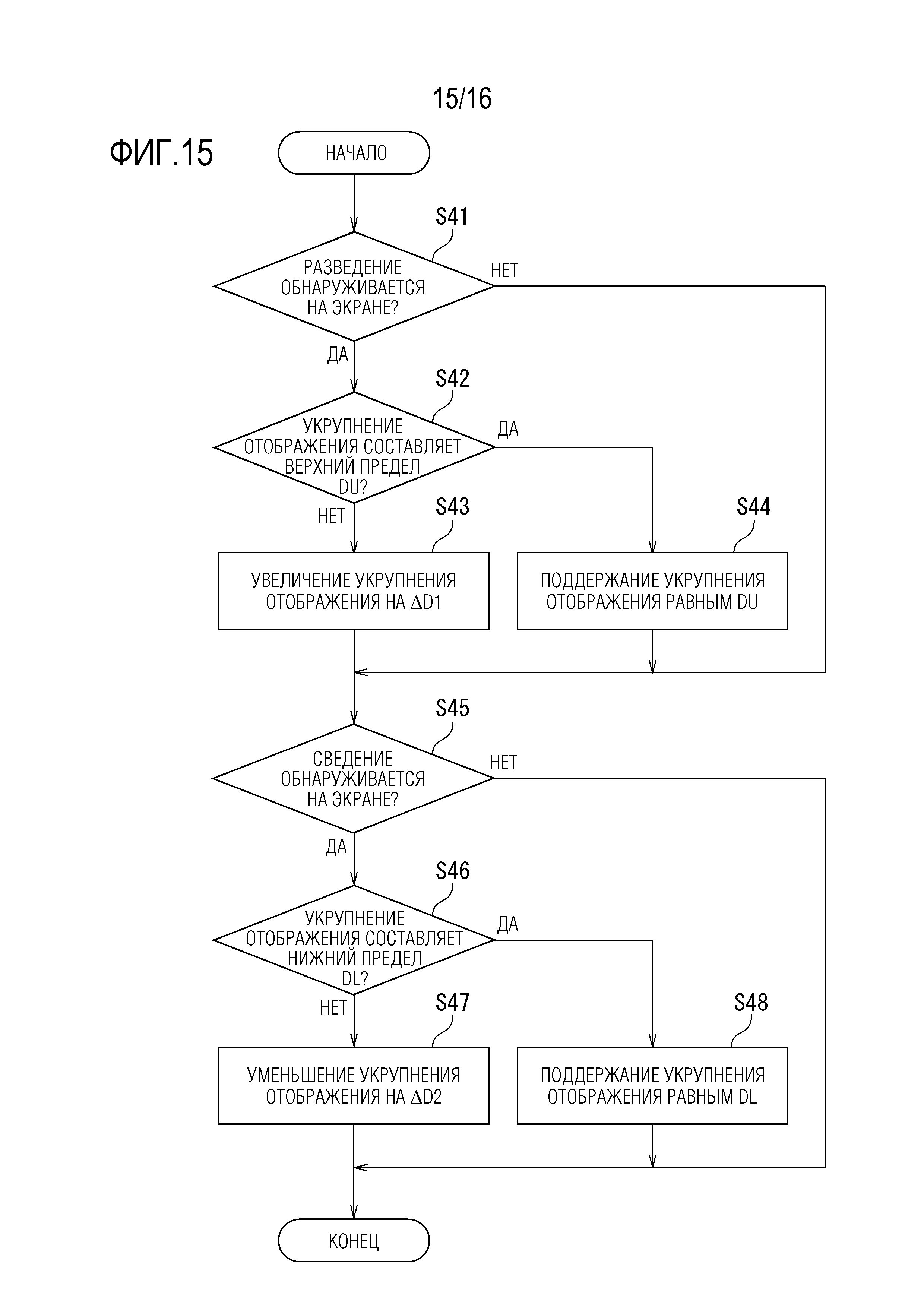
Фиг. 15 является пояснительной схемой примера процесса изменения укрупнения отображения второго изображения окружения; и
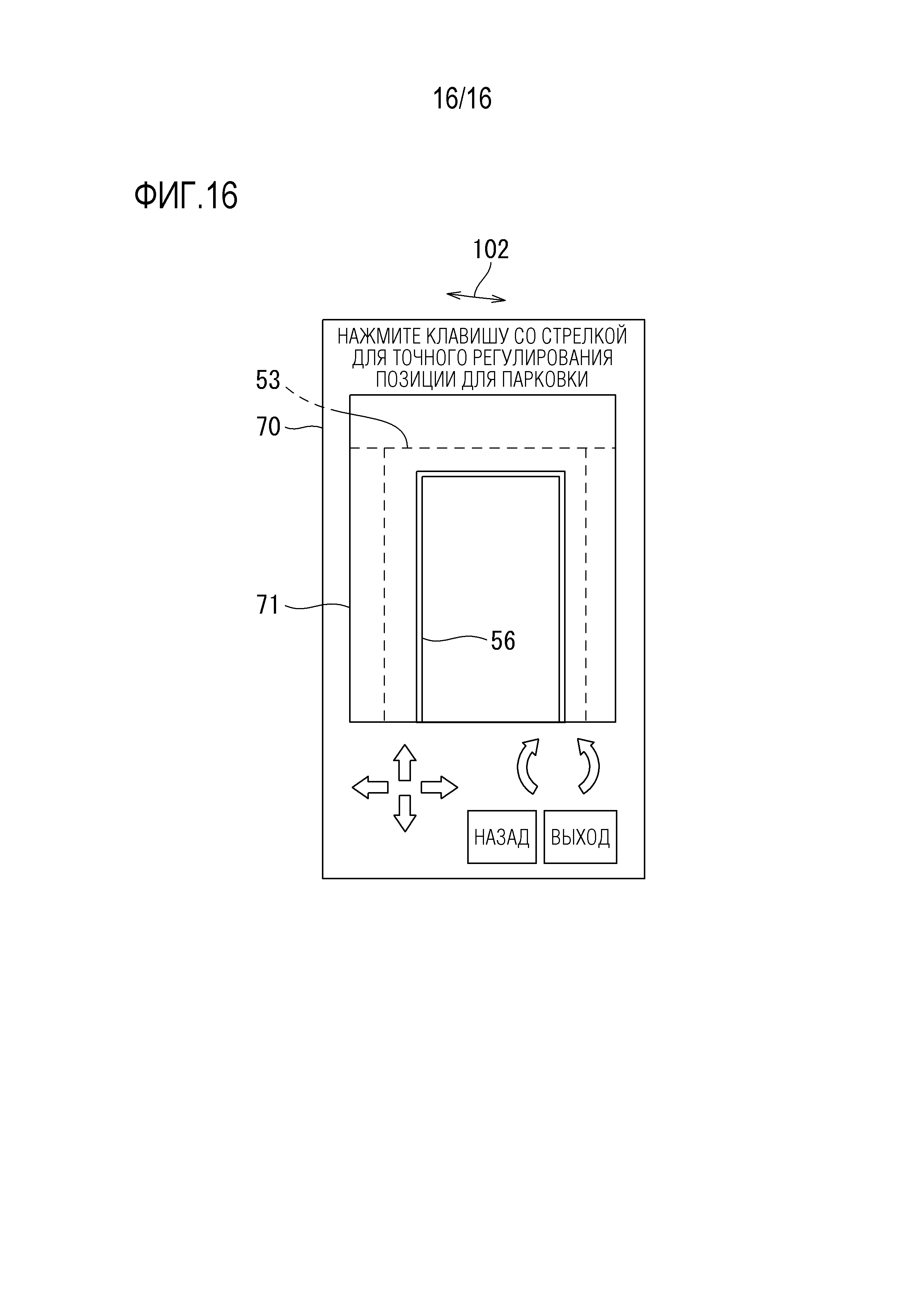
Фиг. 16 является схемой, иллюстрирующей пятый пример экрана регулирования целевой позиции для парковки.
Подробное описание вариантов осуществления
[0009] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
Первый вариант осуществления
Конфигурация
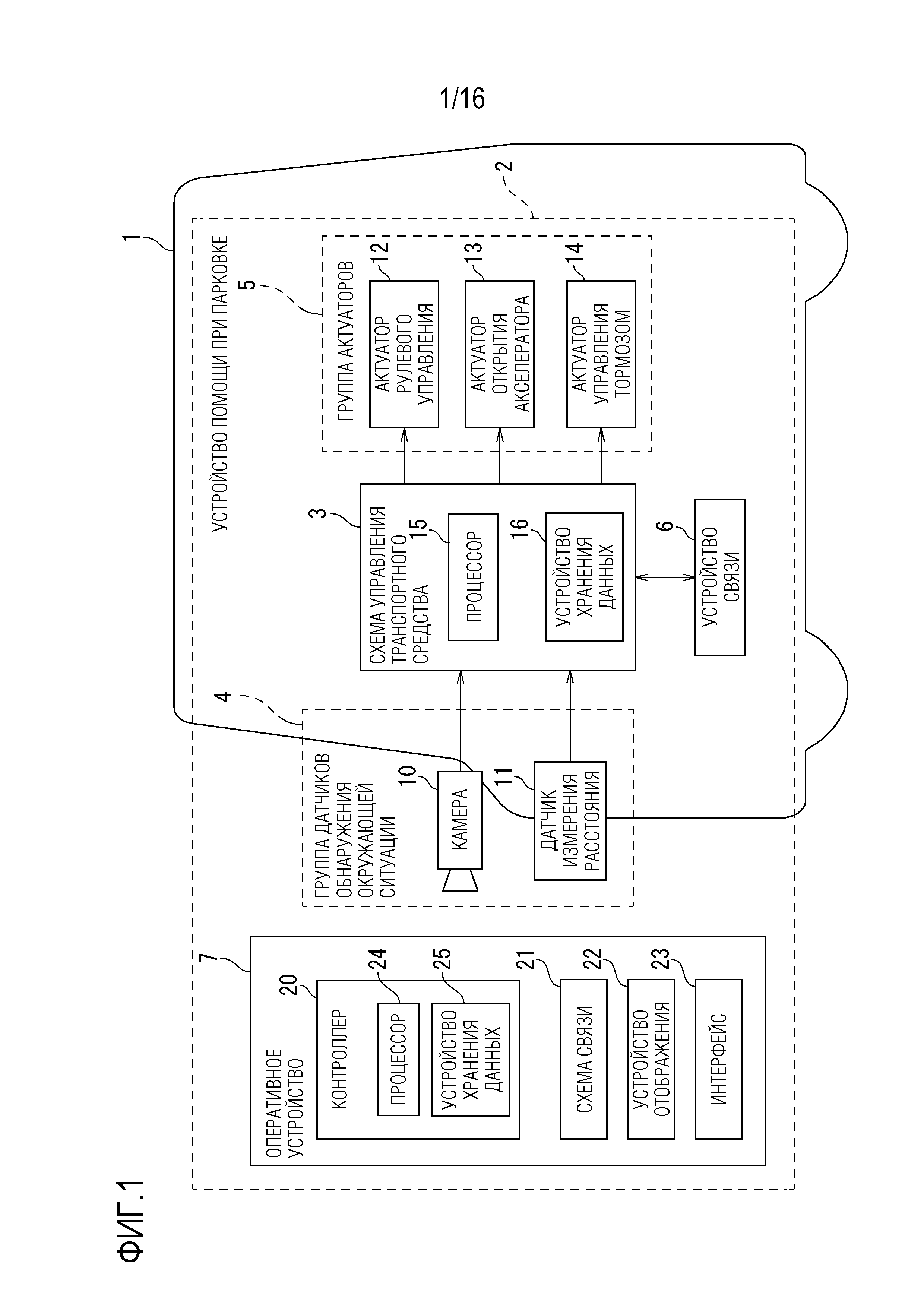
Следует обратиться к фиг. 1. Устройство 2 помощи при парковке, выполненное с возможностью парковать транспортное средство 1 в целевой позиции для парковки посредством автоматического вождения, включает в себя схему 3 управления транспортного средства, группу 4 датчиков обнаружения окружающей ситуации, группу 5 актуаторов, устройство 6 связи и оперативное устройство 7. Схема 3 управления транспортного средства, группа 4 датчиков обнаружения окружающей ситуации, группа 5 актуаторов и устройство 6 связи монтируются на транспортном средстве 1.
Водитель (т.е. оператор оперативного устройства 7) может управлять схемой 3 управления транспортного средства посредством управления оперативным устройством 7 за пределами транспортного средства 1.
[0010] В группу 4 датчиков обнаружения окружающей ситуации включен, датчик для обнаружения окружающей ситуации транспортного средства 1, необходимой для автоматического вождения транспортного средства 1 посредством устройства 2 помощи при парковке. Группа 4 датчиков обнаружения окружающей ситуации включает в себя камеру 10 и датчик 11 измерения расстояния. Камера 10 обнаруживает окружающую ситуацию транспортного средства 1, к примеру, относительную позицию между транспортным средством и другим транспортным средством, расстояние между транспортным средством и другим транспортным средством, помеху, существующую в окружении транспортного средства, и сигнальную линию дорожной разметки на дороге в окружении транспортного средства. Помимо этого, датчик 11 измерения расстояния обнаруживает окружающую ситуацию транспортного средства 1, к примеру, относительную позицию между транспортным средством и другим транспортным средством, расстояние между транспортным средством и другим транспортным средством и помеху, существующую в окружении транспортного средства. Например, датчик 11 измерения расстояния может представлять собой лазерный дальномер или сонар. Камера 10 и датчик 11 измерения расстояния выводят информацию обнаруженной окружающей ситуации в схему 3 управления транспортного средства.
[0011] Схема 3 управления транспортного средства представляет собой электронный модуль управления, выполненный с возможностью выполнять управление автоматическим вождением транспортного средства. Схема 3 управления транспортного средства включает в себя процессор 15 и периферийный компонент, такой как устройство 16 хранения данных.
Процессор 15, например, может представлять собой CPU (центральный процессор) или MPU (микропроцессор).
Устройство 16 хранения данных может включать в себя любое из полупроводникового устройства хранения данных, магнитного устройства хранения данных и оптического устройства хранения данных. Устройство 16 хранения данных может включать в себя запоминающее устройство, такое как ROM (постоянное запоминающее устройство) и RAM (оперативное запоминающее устройство), которое используется в качестве регистра, кэш-памяти или основного устройства хранения данных.
[0012] Следует отметить, что схема 3 управления транспортного средства может достигаться посредством функциональной логической схемы, заданной в полупроводниковой интегральной схеме общего назначения. Например, схема 3 управления транспортного средства может иметь программируемое логическое устройство (PLD), такое как программируемая пользователем вентильная матрица (FPGA) и т.п.
Схема 3 управления транспортного средства определяет целевую позицию для парковки на основе окружающей ситуации, обнаруженной посредством группы 4 датчиков обнаружения окружающей ситуации, и операции оперативного устройства 7 водителем. Схема 3 управления транспортного средства приводит в действие группу 5 актуаторов таким образом, что транспортное средство 1 паркуется в определенной целевой позиции для парковки.
[0013] Группа 5 актуаторов управляет рулем, открытием акселератора и тормозным устройством транспортного средства в ответ на управляющий сигнал из схемы 3 управления транспортного средства, чтобы формировать поведение транспортного средства для транспортного средства. Группа 5 актуаторов включает в себя актуатор 12 рулевого управления, актуатор 13 открытия акселератора и актуатор 14 управления тормозом.
Актуатор 12 рулевого управления управляет направлением руления и величиной руления руля транспортного средства.
Актуатор 13 открытия акселератора управляет открытием акселератора транспортного средства.
Актуатор 14 управления тормозом управляет операцией торможения тормозного устройства транспортного средства.
Следует отметить, что актуатор переключения передач может быть включен в группу 5 актуаторов. Актуатор переключения передач управляет переключением передач транспортного средства, переключает движение передним ходом и движение задним ходом и управляет переключением на парковку.
[0014] Устройство 6 связи осуществляет связь с оперативным устройством 7 через линию проводной или беспроводной связи. Устройство 6 связи соединяется со схемой 3 управления транспортного средства и обеспечивает связь со схемой 3 управления транспортного средства и оперативным устройством 7. Устройство 6 связи может осуществлять связь с оперативным устройством 7, например, через связь ближнего радиуса действия (Near Field Communication), такую как технология Bluetooth (зарегистрированная торговая марка), беспроводную LAN (локальную вычислительную сеть), такую как Wi-Fi (зарегистрированная торговая марка), и общедоступную беспроводную связь. Устройство 6 связи принимает сигнал инструкции, соответствующий операции, выполняемой водителем в оперативном устройстве 7, из оперативного устройства 7.
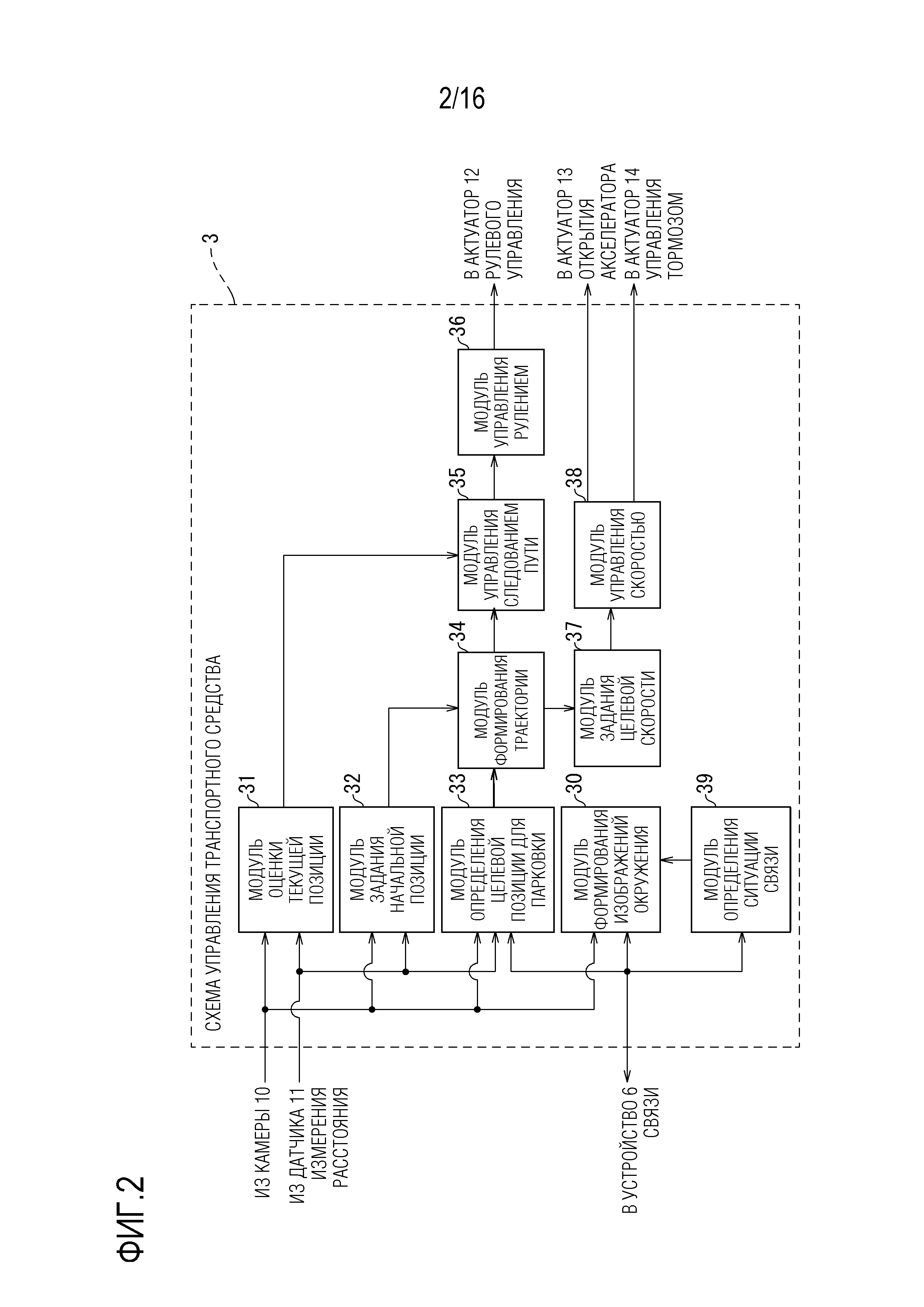
[0015] В дальнейшем описывается функциональная конфигурация схемы 3 управления транспортного средства со ссылкой на фиг. 2. Схема 3 управления транспортного средства включает в себя модуль 30 формирования изображений окружения, модуль 31 оценки текущей позиции, модуль 32 задания начальной позиции, модуль 33 определения целевой позиции для парковки, модуль 34 формирования траектории, модуль 35 управления следованием пути, модуль 36 управления рулением, модуль 37 задания целевой скорости, модуль 38 управления скоростью и модуль 39 определения ситуации связи.
Посредством выполнения компьютерной программы, сохраненной в устройстве 16 хранения данных, процессор 15 схемы 3 управления транспортного средства достигает функций модуля 30 формирования изображений окружения, модуля 31 оценки текущей позиции, модуля 32 задания начальной позиции, модуля 33 определения целевой позиции для парковки, модуля 34 формирования траектории, модуля 35 управления следованием пути, модуля 36 управления рулением, модуля 37 задания целевой скорости, модуля 38 управления скоростью и модуля 39 определения ситуации связи.
[0016] Модуль 30 формирования изображений окружения формирует изображение окружения транспортного средства 1 на основе сигнала изображения, полученного посредством фотографирования окружения транспортного средства 1 с камерой 10. Например, модуль 30 формирования изображений окружения может формировать изображение вида "с высоты птичьего полета" при просмотре из виртуальной точки обзора, расположенной выше транспортного средства 1, в качестве изображения окружения посредством синтезирования сигналов изображений нескольких камер 10, предоставленных в транспортном средстве 1.
Изображение окружения, сформированное посредством модуля 30 формирования изображений окружения, передается в оперативное устройство 7 и отображается в оперативном устройстве 7.
[0017] Здесь, описывается изображение окружения, которое должно формироваться посредством модуля 30 формирования изображений окружения.
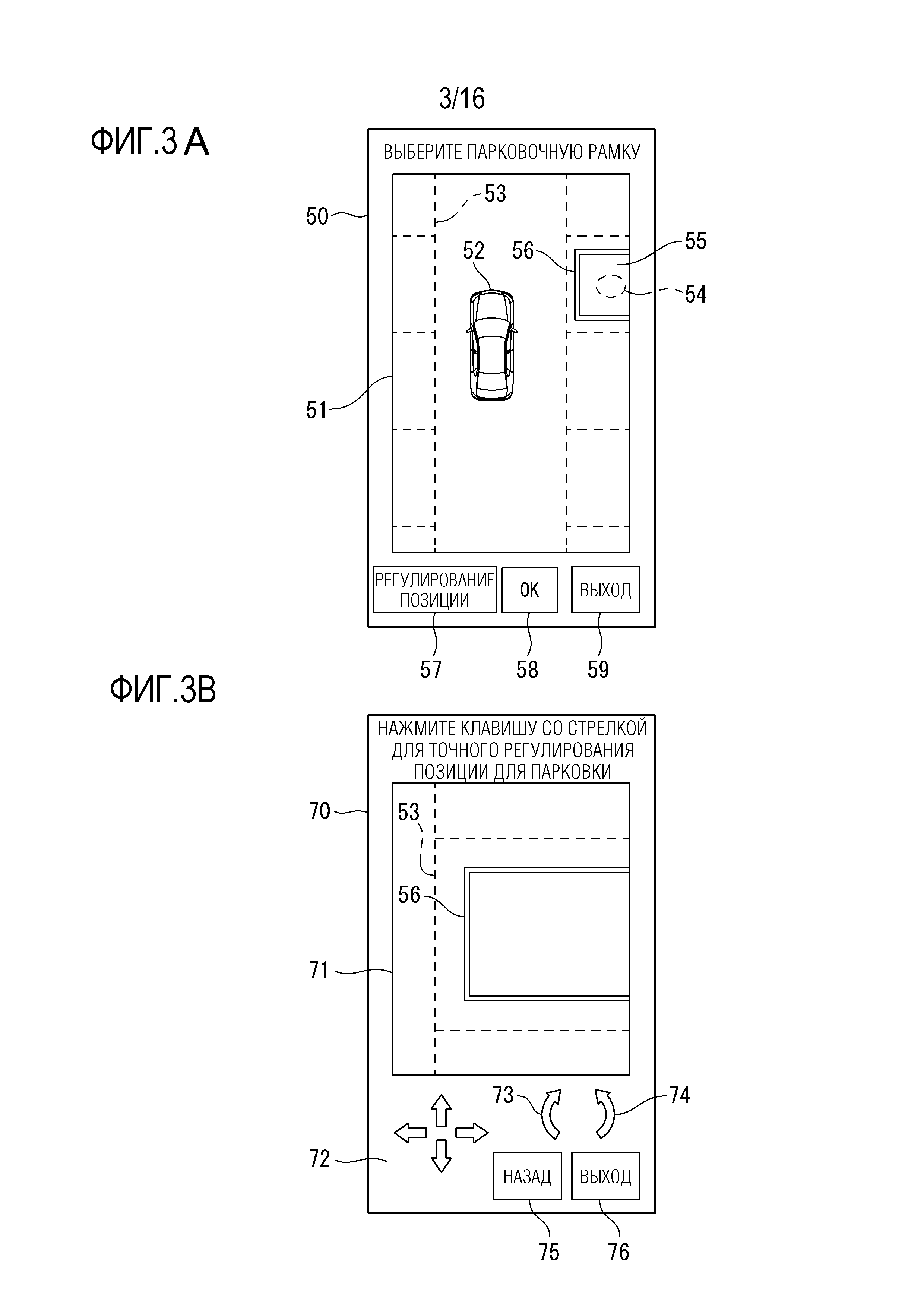
Следует обратиться к фиг. 3A. Ссылка с номером 50 представляет собой экран выбора парковочной рамки, который должен отображаться в оперативном устройстве 7. На экране 50 выбора парковочной рамки, оперативное устройство 7 принимает операцию для выбора парковочной рамки, в которой должно парковаться транспортное средство 1, из одной или более парковочных рамок, существующих в окружении транспортного средства 1.
Модуль 30 формирования изображений окружения формирует первое изображение 51 окружения, которое должно отображаться на экране 50 выбора парковочной рамки. Ссылка с номером 52 обозначает значок, указывающий позицию транспортного средства 1 в первом изображении 51 окружения, и пунктирная линия 53 указывает разделительную линию на поверхности дороги, указывающую парковочные рамки, существующие в окружении транспортного средства 1.
На экране 50 выбора парковочной рамки, посредством операции для указания любого места 54 в диапазоне парковочной рамки 55, захваченном в первом изображении 51 окружения, парковочная рамка 55 выбирается в качестве парковочной рамки, в которой должно парковаться транспортное средство 1. Например, парковочная рамка 55 может выбираться посредством касания позиции отображения места 54 на первом изображении 51 окружения.
[0018] Когда парковочная рамка, в которой должно парковаться транспортное средство 1, выбирается, начальная позиция для целевой позиции для парковки задается в выбранной парковочной рамке. В первом изображении 51 окружения отображается метка 56 позиции для парковки, указывающая диапазон, занимаемый посредством транспортного средства 1, припаркованного в целевой позиции для парковки. Начальная позиция может задаваться в центре парковочной рамки. В этом случае, начальная позиция может задаваться в центре посредством обнаружения ширины и глубины парковочной рамки. Помимо этого, начальная позиция не обязательно представляет собой центр парковочной рамки. Начальная позиция может задаваться таким образом, что она входит в парковочную рамку, и в зависимости от окружения при парковке, не обязательно должна входить в парковочную рамку. Например, когда незанятое место существует за пределами парковочной рамки, начальная позиция может задаваться с учетом позиции, в которой пассажиры транспортного средства легко выходят из транспортного средства.
Начальная позиция для целевой позиции для парковки задается посредством схемы 3 управления транспортного средства на основе окружающей ситуации, обнаруженной посредством группы 4 датчиков обнаружения окружающей ситуации. В оперативном устройстве 7, целевая позиция для парковки может регулироваться посредством перемещения метки 56 позиции для парковки.
Посредством нажатия кнопки 57 "Регулирование позиции", экран регулирования целевой позиции для парковки для точного регулирования позиции метки 56 позиции для парковки отображается в оперативном устройстве 7.
[0019] Следует обратиться к фиг. 3B. Ссылка с номером 70 обозначает экран регулирования целевой позиции для парковки. Модуль 30 формирования изображений окружения формирует второе изображение 71 окружения, которое должно отображаться на экране 70 регулирования целевой позиции для парковки.
Чтобы точно регулировать позицию целевой позиции для парковки, второе изображение 71 окружения задается с возможностью иметь более высокое пиксельное разрешение, чем пиксельное разрешение первого изображения 51 окружения. Здесь, пиксельное разрешение означает ширину поля видимости в расчете на один пиксел, т.е. размер объекта, соответствующего одному пикселу, первого изображения 51 окружения и второго изображения 71 окружения.
[0020] Позиция метки 56 позиции для парковки во втором изображении 71 окружения может точно регулироваться посредством управления клавишей 72 управления курсором. Например, при управлении клавишей 72 управления курсором, метка 56 позиции для парковки перемещается вплоть до определенной величины перемещения без прокручивания второго изображения 71 окружения, и при дальнейшем продолжении управления клавишей 72 управления курсором, второе изображение 71 окружения может прокручиваться.
Кроме того, метка 56 позиции для парковки может вращаться вправо посредством управления клавишей 73 вращения вправо, и метка 56 позиции для парковки может вращаться влево посредством управления клавишей 74 вращения влево.
[0021] Посредством нажатия кнопки 75 "Назад" после регулирования позиции метки 56 позиции для парковки, экран 50 выбора парковочной рамки возвращается. В это время, регулирование, выполняемое на экране 70 регулирования целевой позиции для парковки, отражается в целевой позиции для парковки, и целевая позиция для парковки идентифицируется посредством нажатия кнопки 58 "OK". Затем, начинается автоматическое вождение, которое паркует транспортное средство 1 в целевой позиции для парковки после регулирования.
Напротив, когда любая из кнопок 59 и 76 "Выход" нажимается, начальная позиция, заданная при выборе парковочной рамки, идентифицируется в качестве целевой позиции для парковки без выполнения регулирования целевой позиции для парковки, и начинается автоматическое вождение, которое паркует транспортное средство 1 в целевой позиции для парковки.
[0022] Следует обратиться к фиг. 2. Модуль 30 формирования изображений окружения выводит первое изображение 51 окружения и второе изображение 71 окружения в устройство 6 связи. Устройство 6 связи передает первое изображение 51 окружения и второе изображение 71 окружения в оперативное устройство 7.
Модуль 31 оценки текущей позиции предполагает текущую позицию транспортного средства 1 на основе окружающей ситуации, обнаруженной посредством группы 4 датчиков обнаружения окружающей ситуации. Модуль 31 оценки текущей позиции выводит информацию текущей позиции в модуль 35 управления следованием пути.
Модуль 32 задания начальной позиции задает начальную позицию операции парковки посредством автоматического вождения на основе окружающей ситуации, обнаруженной посредством группы 4 датчиков обнаружения окружающей ситуации. Модуль 32 задания начальной позиции выводит информацию начальной позиции в модуль 34 формирования траектории.
[0023] Модуль 33 определения целевой позиции для парковки обнаруживает одну или более парковочных рамок, существующих в окружении транспортного средства 1, на основе окружающей ситуации, обнаруженной посредством группы 4 датчиков обнаружения окружающей ситуации.
Модуль 33 определения целевой позиции для парковки принимает сигнал инструкции, соответствующий операции, выполняемой водителем в оперативном устройстве 7, через устройство 6 связи. Модуль 33 определения целевой позиции для парковки принимает сигнал инструкции операции выбора парковочной рамки на экране 50 выбора парковочной рамки из оперативного устройства 7. Модуль 33 определения целевой позиции для парковки задает начальную позицию целевой позиции для парковки в парковочной рамке, выбранной водителем из обнаруженных парковочных рамок. Модуль 33 определения целевой позиции для парковки передает начальную позицию целевой позиции для парковки в оперативное устройство 7 через устройство 6 связи. Следует отметить, что модуль 33 определения целевой позиции для парковки может предоставляться в транспортном средстве или может предоставляться в оперативном устройстве 7. Следует отметить, что целевая позиция для парковки может определяться в ответ на операцию, выполняемую посредством оперативного устройства, или может задаваться посредством интерфейса в транспортном средстве и затем сбрасываться посредством оперативного устройства за пределами транспортного средства.
[0024] Кроме того, модуль 33 определения целевой позиции для парковки принимает сигнал инструкции операции регулирования целевой позиции для парковки на экране 70 регулирования целевой позиции для парковки из оперативного устройства 7. Модуль 33 определения целевой позиции для парковки регулирует целевую позицию для парковки в ответ на сигнал инструкции. Модуль 33 определения целевой позиции для парковки информирует оперативное устройство 7 в отношении того, что операция оперативного устройства 7 отражается в целевой позиции для парковки, и для того, чтобы обновлять позицию метки 56 позиции для парковки на экране 70 регулирования целевой позиции для парковки, может передавать сигнал подтверждения приема сигнала инструкции в оперативное устройство 7 через устройство 6 связи. Модуль 33 определения целевой позиции для парковки может передавать целевую позицию для парковки после регулирования в оперативное устройство 7.
[0025] Помимо этого, модуль 33 определения целевой позиции для парковки принимает сигнал инструкции операции нажатия кнопки 58 "OK" или кнопок 59 и 76 "Выход" из оперативного устройства 7. Когда кнопка 58 "OK" нажимается, модуль 33 определения целевой позиции для парковки идентифицирует целевую позицию для парковки и выводит информацию целевой позиции для парковки в модуль 34 формирования траектории. Когда кнопка 59 или 76 "Выход" нажимается, модуль 33 определения целевой позиции для парковки идентифицирует начальную позицию, заданную при выборе парковочной рамки, в качестве целевой позиции для парковки и выводит начальную позицию в модуль 34 формирования траектории в качестве информации целевой позиции для парковки.
[0026] Модуль 34 формирования траектории формирует траекторию для парковки из начальной позиции операции парковки, заданной посредством модуля 32 задания начальной позиции, в целевую позицию для парковки, определенную посредством модуля 33 определения целевой позиции для парковки. Модуль 34 формирования траектории выводит информацию сформированной траектории для парковки в модуль 35 управления следованием пути и модуль 37 задания целевой скорости.
Модуль 35 управления следованием пути вычисляет целевой угол поворота при рулении транспортного средства 1 таким образом, что текущая позиция транспортного средства 1, оцененная посредством модуля 31 оценки текущей позиции, расположена на траектории для парковки, сформированной посредством модуля 34 формирования траектории. Модуль 35 управления следованием пути выводит информацию вычисленного целевого угла поворота при рулении в модуль 36 управления рулением.
[0027] Модуль 36 управления рулением вычисляет рабочую величину актуатора 12 рулевого управления таким образом, что разность между фактическим углом поворота при рулении транспортного средства 1 и целевым углом поворота при рулении, вычисленным посредством модуля 35 управления следованием пути, понижается. Модуль 36 управления рулением выводит вычисленную рабочую величину в актуатор 12 рулевого управления.
Модуль 37 задания целевой скорости вычисляет целевую скорость, на которой транспортное средство 1 движется по траектории для парковки, сформированной посредством модуля 34 формирования траектории. Модуль 37 задания целевой скорости выводит вычисленную целевую скорость в модуль 38 управления скоростью.
Модуль 38 управления скоростью вычисляет рабочую величину актуатора 13 открытия акселератора и актуатора 14 управления тормозом таким образом, что разность между скоростью транспортного средства для транспортного средства 1 и целевой скоростью, вычисленной посредством модуля 35 управления следованием пути, понижается. Модуль 38 управления скоростью выводит вычисленную рабочую величину в актуатор 13 открытия акселератора и актуатор 14 управления тормозом.
[0028] Модуль 39 определения ситуации связи определяет ситуацию связи между устройством 6 связи и оперативным устройством 7. Например, модуль 39 определения ситуации связи может определять скорость передачи данных (например, бит/с) в качестве ситуации связи между устройством 6 связи и оперативным устройством 7. Помимо этого, например, модуль 39 определения ситуации связи может определять присутствие или отсутствие риска формирования сбоя при связи между устройством 6 связи и оперативным устройством 7 (в дальнейшем в этом документе, называемого "риском сбоя связи") в качестве ситуации связи.
[0029] Например, модуль 39 определения ситуации связи измеряет скорость передачи данных в каждый момент времени, создает профиль ситуации связи, которая представляет собой временные ряды скорости передачи данных, и сохраняет профиль ситуации связи в устройстве 16 хранения данных.
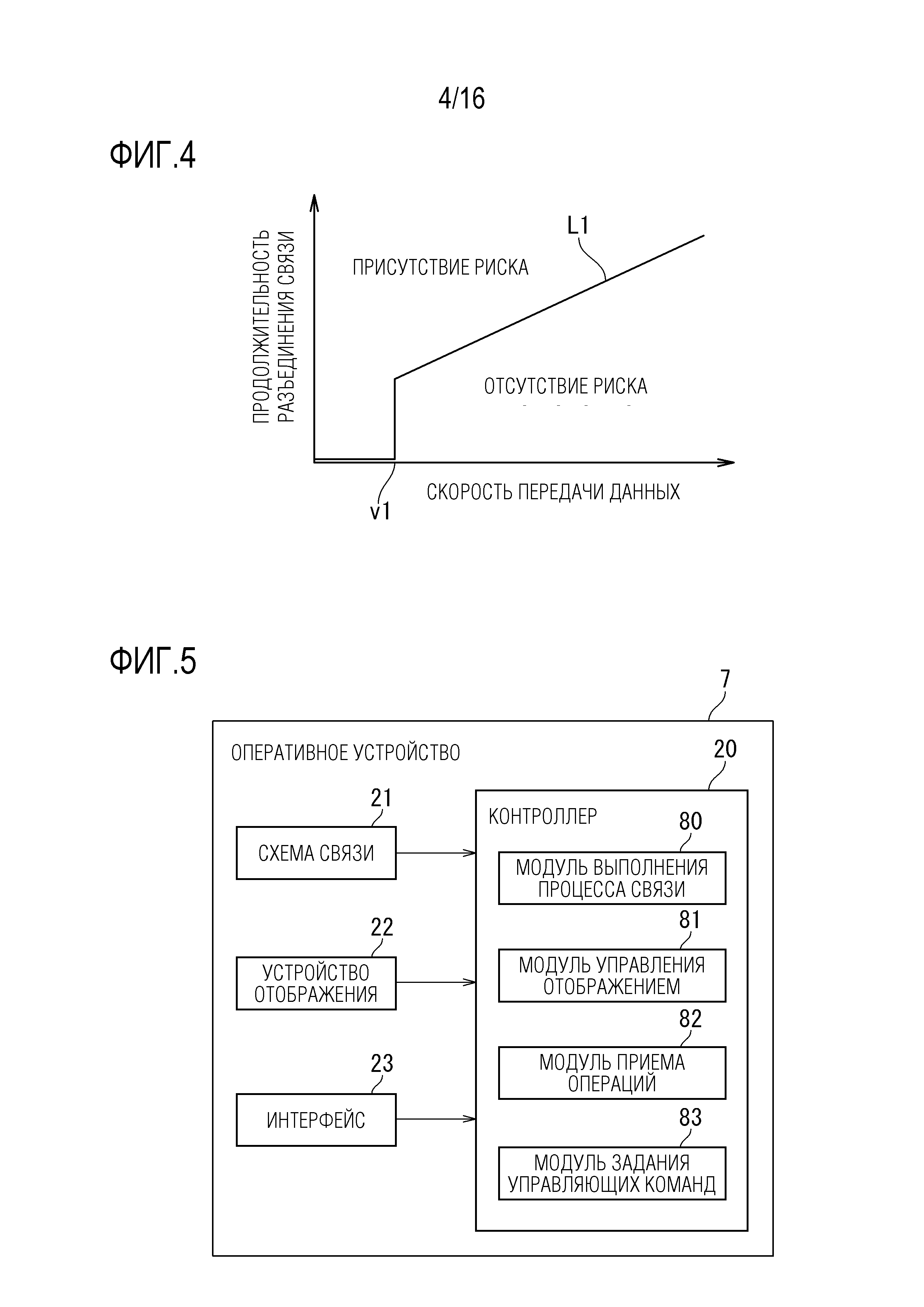
Модуль 39 определения ситуации связи считывает профиль ситуации связи и вычисляет длительность в единицу времени периода, в который связь между устройством 6 связи и оперативным устройством 7 разъединяется (в дальнейшем в этом документе, называемую "продолжительностью разъединения связи"). Модуль 39 определения ситуации связи определяет то, что возникает риск сбоя связи, когда продолжительность разъединения связи превышает пороговое значение для определения риска. Помимо этого, модуль 39 определения ситуации связи определяет то, что отсутствует риск сбоя связи, когда продолжительность разъединения связи составляет пороговое значение для определения риска или менее.
Следует обратиться к фиг. 4. Модуль 39 определения ситуации связи может изменять пороговое значение для определения риска в зависимости от скорости передачи данных. Сплошная линия L1 указывает функцию скорости передачи данных для определения порогового значения для определения риска.
[0030] Например, когда скорость передачи данных меньше v1, пороговое значение для определения риска может быть равным нулю. Более конкретно, когда скорость передачи данных меньше v1, модуль 39 определения ситуации связи определяет то, что возникает риск сбоя связи независимо от скорости передачи данных.
Когда скорость передачи данных составляет v1 или более, пороговое значение для определения риска может составлять ненулевое фиксированное значение или возрастающую функцию скорости передачи данных.
Модуль 39 определения ситуации связи выводит информацию определенной ситуации связи в устройство 6 связи. Устройство 6 связи передает информацию ситуации связи в оперативное устройство 7.
[0031] Помимо этого, модуль 39 определения ситуации связи выводит информацию определенной ситуации связи в модуль 30 формирования изображений окружения. Модуль 30 формирования изображений окружения может формировать второе изображение 71 окружения, имеющее пиксельное разрешение, которое отличается в зависимости от ситуации связи.
Например, когда ситуация связи является плохой, модуль 30 формирования изображений окружения может уменьшать пиксельное разрешение второго изображения 71 окружения, которое должно передаваться в оперативное устройство 7, по сравнению с тем, когда ситуация связи является хорошей.
Например, модуль 30 формирования изображений окружения может формировать второе изображение 71 окружения, имеющее пиксельное разрешение R1, когда скорость передачи данных составляет пороговое значение v2 или более, и может формировать второе изображение 71 окружения, имеющее пиксельное разрешение R2, меньшее пиксельного разрешения R1, когда скорость передачи данных меньше порогового значения v2.
[0032] Посредством уменьшения пиксельного разрешения второго изображения 71 окружения, может уменьшаться объем связи для передачи второго изображения 71 окружения в оперативное устройство 7. Следовательно, когда ситуация связи является плохой, может уменьшаться задержка на передачу второго изображения 71 окружения.
Таким образом, например, для прокрутки второго изображения 71 окружения на экране 70 регулирования целевой позиции для парковки, проиллюстрированном на фиг. 3B, когда второе изображение 71 окружения передается в ответ на операцию на экране 70 регулирования целевой позиции для парковки, отставание при прокрутке вследствие задержки на передачу второго изображения 71 окружения может быть уменьшено.
[0033] Далее описывается конфигурация оперативного устройства 7. Следует обратиться к фиг. 1. Оперативное устройство 7 включает в себя контроллер 20, схему 21 связи, устройство 22 отображения и интерфейс 23.
Контроллер 20 включает в себя процессор 24 и периферийный компонент, такой как устройство 25 хранения данных. Процессор 24, например, может представлять собой CPU или MPU. Устройство 25 хранения данных может включать в себя любое из полупроводникового устройства хранения данных, магнитного устройства хранения данных и оптического устройства хранения данных. Устройство 25 хранения данных может включать в себя запоминающее устройство, такое как ROM и RAM, которое используется в качестве регистра, кэш-памяти или основного устройства хранения данных. Следует отметить, что контроллер 20 может достигаться посредством функциональной логической схемы, заданной в полупроводниковой интегральной схеме общего назначения. Например, контроллер 20 может иметь PLD, такое как FPGA и т.п.
[0034] Схема 21 связи осуществляет связь с устройством 6 связи через линию проводной или беспроводной связи. Схема 21 связи может осуществлять связь с устройством 6 связи, например, через связь ближнего радиуса действия (Near Field Communication), такую как технология Bluetooth (зарегистрированная торговая марка), беспроводную LAN (локальную вычислительную сеть), такую как Wi-Fi (зарегистрированная торговая марка), и общедоступную беспроводную связь.
Схема 21 связи передает сигнал инструкции, соответствующий операции, выполняемой водителем в оперативном устройстве 7, в устройство 6 связи. Помимо этого, схема 21 связи принимает сигнал подтверждения приема, который должен передаваться через устройство 6 связи в ответ на сигнал инструкции. Помимо этого, схема 21 связи принимает первое изображение 51 окружения, второе изображение 71 окружения, информацию начальной позиции для целевой позиции для парковки и информацию ситуации связи из устройства 6 связи.
[0035] Устройство 22 отображения функционирует в качестве средства отображения и отображает различные фрагменты информации посредством управления контроллером 20. Например, экран 50 выбора парковочной рамки, проиллюстрированный на фиг. 3A, и экран 70 регулирования целевой позиции для парковки, проиллюстрированный на фиг. 3B, могут отображаться на устройстве 22 отображения.
Интерфейс 23 функционирует в качестве средства ввода информации и может включать в себя кнопку ввода, сенсорную панель, предоставленную на экране отображения устройства 22 отображения, и т.п. Интерфейс 23 используется для приема операции водителем в оперативном устройстве 7. Например, интерфейс 23 принимает операции на экране 50 выбора парковочной рамки и на экране 70 регулирования целевой позиции для парковки.
[0036] Далее описывается функциональная конфигурация оперативного устройства 7 со ссылкой на фиг. 5. Контроллер 20 включает в себя модуль 80 выполнения процесса связи, модуль 81 управления отображением, модуль 82 приема операций и модуль 83 задания управляющих команд. Посредством выполнения компьютерной программы, сохраненной в устройстве 25 хранения данных, процессор 24 контроллера 20 достигает функций модуля 80 выполнения процесса связи, модуля 81 управления отображением, модуля 82 приема операций и модуля 83 задания управляющих команд.
[0037] Модуль 80 выполнения процесса связи выполняет процесс связи со схемой 3 управления транспортного средства через линию связи между схемой 21 связи и устройством 6 связи. Например, модуль 80 выполнения процесса связи выполняет процессы для передачи сигнала инструкции, соответствующего операции, выполняемой водителем, приема сигнала подтверждения приема для сигнала инструкции и приема первого изображения 51 окружения, второго изображения 71 окружения, информации начальной позиции для целевой позиции для парковки и информации ситуации связи.
Модуль 81 управления отображением выполняет процесс отображения различных экранов на устройстве 22 отображения. Например, модуль 81 управления отображением отображает экран 50 выбора парковочной рамки, проиллюстрированный на фиг. 3A, на устройстве 22 отображения. Когда водитель нажимает кнопку 57 "Регулирование позиции", модуль 81 управления отображением отображает экран 70 регулирования целевой позиции для парковки, проиллюстрированный на фиг. 3B, на устройстве 22 отображения.
[0038] Когда операция регулирования позиции метки 56 позиции для парковки выполняется на экране 70 регулирования целевой позиции для парковки, модуль 81 управления отображением перемещает метку 56 позиции для парковки в ответ на операцию регулирования. В это время, модуль 81 управления отображением может обновлять позицию метки 56 позиции для парковки после приема сигнала подтверждения приема, который должен передаваться из схемы 3 управления транспортного средства для сигнала инструкции, передаваемого в ответ на операцию регулирования.
Помимо этого, модуль 81 управления отображением может прокручивать второе изображение 71 окружения в ответ на операцию регулирования позиции метки 56 позиции для парковки. В это время, модуль 81 управления отображением может отображать второе изображение 71 окружения после прокрутки, которое должно последовательно передаваться из схемы 3 управления транспортного средства в ответ на операцию регулирования, на экране 70 регулирования целевой позиции для парковки.
[0039] Модуль 82 приема операций выполняет процесс приема операции, выполняемой водителем с интерфейсом 23.
Модуль 83 задания управляющих команд формирует сигнал инструкции, соответствующий операции, выполняемой водителем. Сигнал инструкции может включать в себя, например, сигнал инструкции операции регулирования целевой позиции для парковки и сигнал инструкции операции нажатия кнопки 58 "OK" или кнопок 59 и 76 "Выход". Модуль 83 задания управляющих команд выводит сформированный сигнал инструкции в схему 21 связи.
[0040] Контроллер 20 ограничивает операцию на экране 70 регулирования целевой позиции для парковки в зависимости от информации ситуации связи, принимаемой из устройства 6 связи. Например, контроллер 20 ограничивает операцию для регулирования вручную целевой позиции для парковки в зависимости от ситуации связи.
Соответственно, в состоянии, в котором поступление сигнала инструкции операции регулирования целевой позиции для парковки в схеме 3 управления транспортного средства задерживается вследствие плохой ситуации связи, и удобство использования операции регулирования целевой позиции для парковки возможно ухудшается, водителю может запрещаться заранее выполнение операции регулирования. Таким образом, предотвращается испытывание водителем ухудшения удобства использования, и может предотвращаться ощущение дискомфорта вследствие ухудшения удобства использования.
[0041] Например, когда сигнал инструкции операции регулирования и его сигнал подтверждения приема задерживаются, обновление метки 56 позиции для парковки на экране 70 регулирования целевой позиции для парковки задерживается. Таким образом, водитель ошибочно полагает, что операция пропущена, и возможно повторяет операцию. Следовательно, метка 56 позиции для парковки перемещается в непреднамеренную позицию в то время, когда операция отражается задержанным способом, и в силу этого водитель ощущает ухудшение удобства использования.
Следовательно, посредством запрета заранее водителю выполнения операции регулирования, предотвращается ощущение дискомфорта, вызываемое посредством выполнения операции регулирования.
[0042] Например, когда ситуация связи не удовлетворяет предварительно определенному условию разрешения, операция регулирования целевой позиции для парковки может запрещаться посредством запрета перехода к экрану 70 регулирования целевой позиции для парковки. Например, когда определяется то, что возникает риск сбоя связи, переход к экрану 70 регулирования целевой позиции для парковки может запрещаться. Помимо этого, когда скорость передачи данных меньше порогового значения, переход к экрану 70 регулирования целевой позиции для парковки может запрещаться.
[0043] Следует обратиться к фиг. 6. Модуль 82 приема операций может запрещать переход к экрану 70 регулирования целевой позиции для парковки посредством запрета операции кнопки 57 "Регулирование позиции" (более конкретно, посредством отключения кнопки 57 "Регулирование позиции"). В это время, модуль 81 управления отображением формирует отображение для информирования водителя в отношении того, что переход к экрану 70 регулирования целевой позиции для парковки запрещается, посредством изменения отображения кнопки 57 "Регулирование позиции" или посредством прекращения отображения кнопки 57 "Регулирование позиции". Более конкретно, модуль 81 управления отображением формирует отображение для информирования водителя в отношении того, что операция для регулирования вручную целевой позиции для парковки ограничивается.
Помимо этого, модуль 82 приема операций может запрещать операции клавиши 72 управления курсором, клавиши 73 вращения вправо и клавиши 74 вращения влево. Модуль 81 управления отображением может формировать отображение для информирования водителя в отношении того, что операции этих клавиш запрещаются.
[0044] Работа
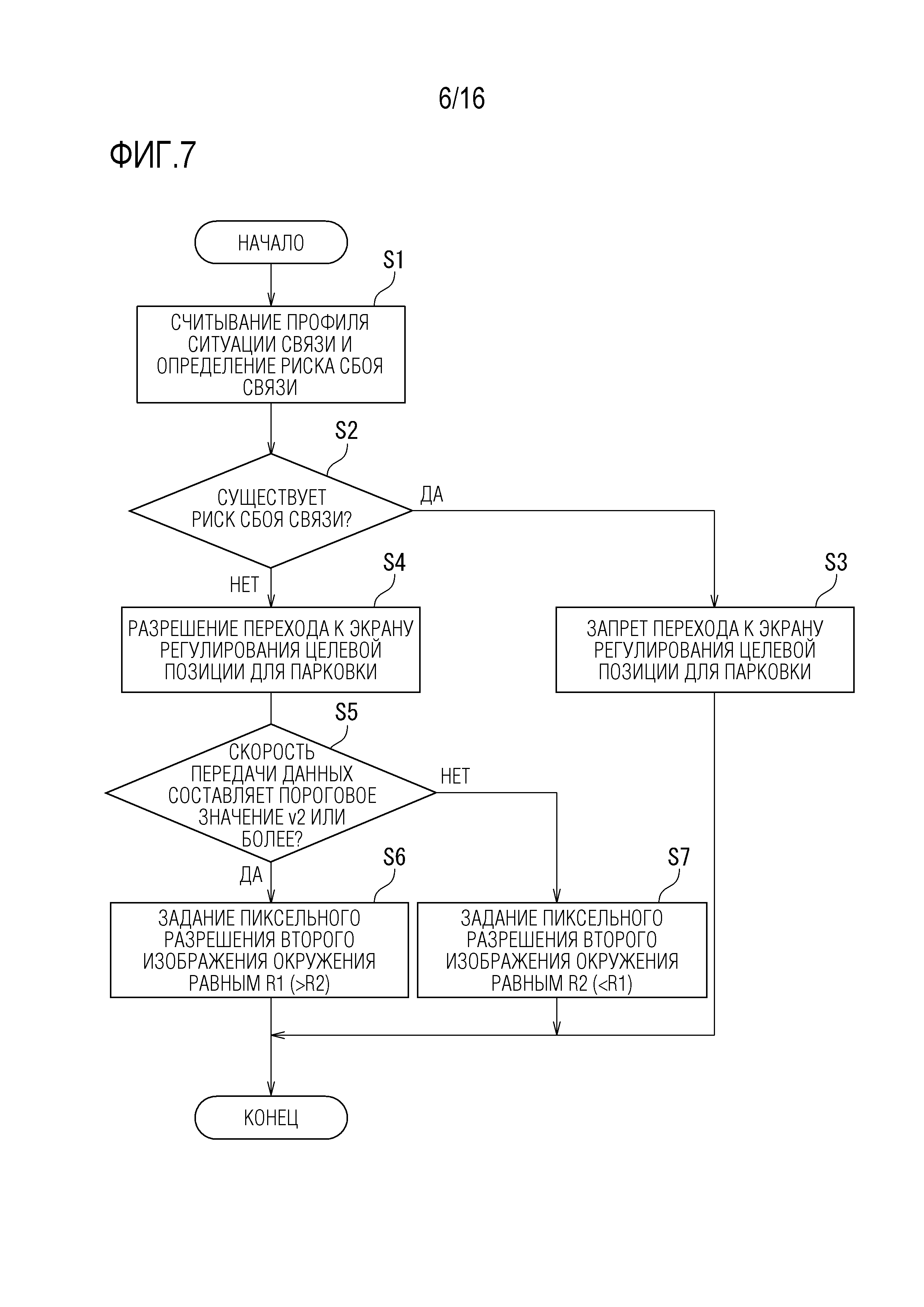
Далее описывается пример способа помощи согласно первому варианту осуществления. Следует обратиться к фиг. 7.
На этапе S1, модуль 39 определения ситуации связи считывает профиль ситуации связи и определяет то, возникает или нет риск сбоя связи. Когда возникает риск сбоя связи (этап S2:Y), процесс переходит к этапу S3. Когда отсутствует риск сбоя связи (этап S2:N), процесс переходит к этапу S4.
На этапе S3, контроллер 20 запрещает переход к экрану 70 регулирования целевой позиции для парковки. После этого процесс заканчивается.
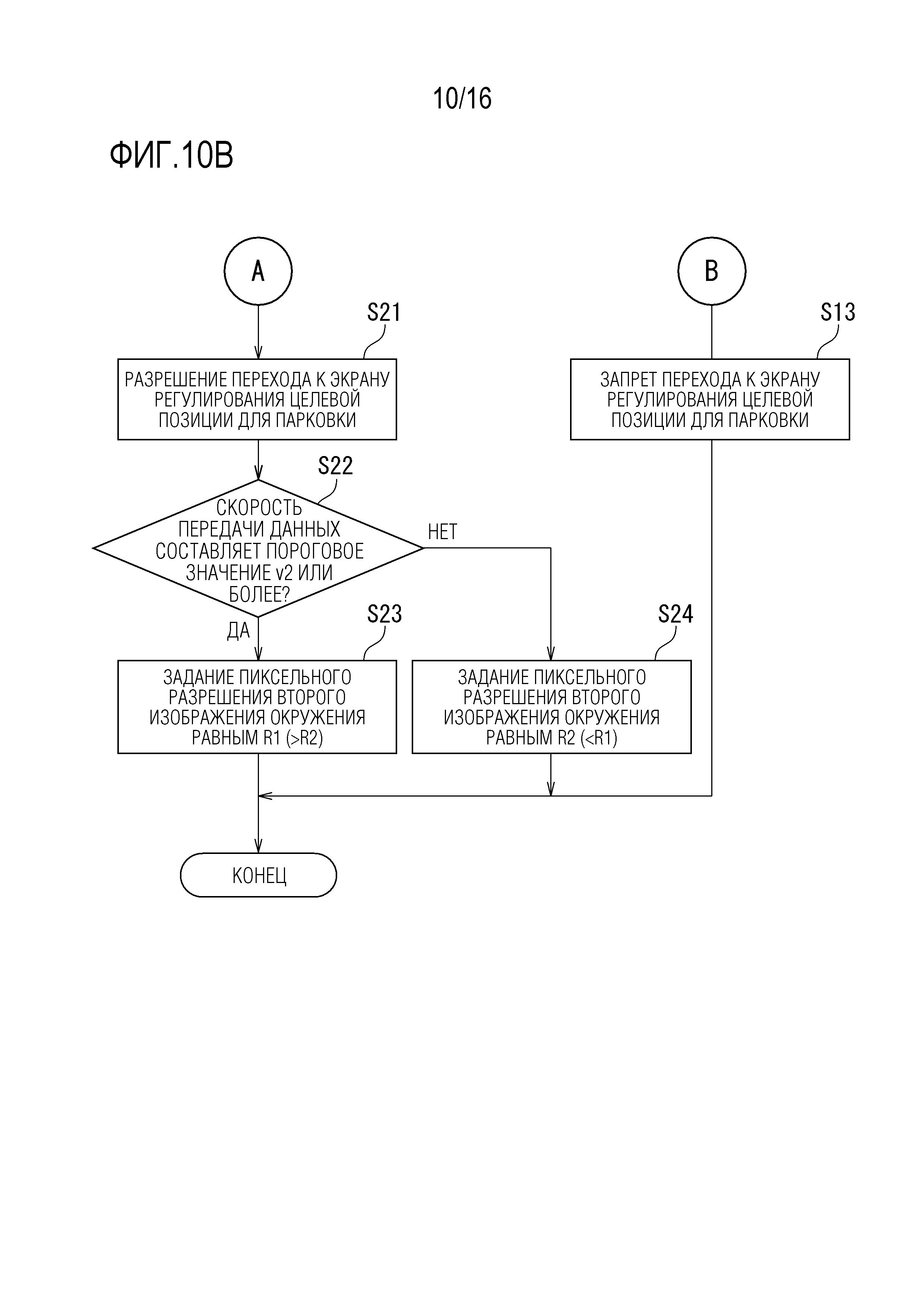
[0045] На этапе S4, контроллер 20 разрешает переход к экрану 70 регулирования целевой позиции для парковки.
На этапе S5, модуль 30 формирования изображений окружения определяет то, составляет либо нет скорость передачи данных пороговое значение v2 или более. Когда скорость передачи данных составляет пороговое значение v2 или более (этап S5:Y), процесс переходит к этапу S6. Когда скорость передачи данных меньше порогового значения v2 (этап S5:N), процесс переходит к этапу S7.
На этапе S6, модуль 30 формирования изображений окружения задает разрешение второго изображения 71 окружения, которое должно передаваться в оперативное устройство 7, равным R1, превышающему R2. После этого процесс заканчивается.
На этапе S7, модуль 30 формирования изображений окружения задает разрешение второго изображения 71 окружения, которое должно передаваться в оперативное устройство 7, равным R2, меньшему R1. После этого процесс заканчивается.
[0046] Преимущества первого варианта осуществления
(1) Группа 4 датчиков обнаружения окружающей ситуации обнаруживает окружающую ситуацию транспортного средства 1. Модуль 33 определения целевой позиции для парковки задает начальную позицию целевой позиции для парковки транспортного средства 1 на основе обнаруженной окружающей ситуации. Модуль 39 определения ситуации связи определяет ситуацию связи между оперативным устройством 7, выполненным с возможностью принимать операцию оператором за пределами транспортного средства 1 и передавать сигнал инструкции, соответствующий операции, и устройством 6 связи, смонтированным на транспортном средстве 1 и выполненным с возможностью принимать сигнал инструкции. Контроллер 20 ограничивает операцию для регулирования вручную целевой позиции для парковки в оперативном устройстве 7 в зависимости от ситуации связи. Модуль 83 задания управляющих команд передает, когда целевая позиция для парковки регулируется, сигнал инструкции для перемещения целевой позиции для парковки в устройство 6 связи. Модуль 33 определения целевой позиции для парковки перемещает целевую позицию для парковки в ответ на сигнал инструкции, принимаемый посредством устройства связи. Схема 3 управления транспортного средства паркует транспортное средство 1 в целевой позиции для парковки посредством автоматического вождения.
[0047] Таким образом, в состоянии, в котором поступление сигнала инструкции операции регулирования целевой позиции для парковки в схеме 3 управления транспортного средства задерживается вследствие плохой ситуации связи, и удобство использования операции регулирования целевой позиции для парковки ухудшается, водителю может запрещаться заранее выполнение операции регулирования, имеющей ухудшенное удобство использования. В этом случае, транспортное средство 1 может парковаться в начальной позиции для целевой позиции для парковки, заданной на основе окружающей ситуации транспортного средства 1. Таким образом, предотвращается испытывание водителем ухудшения удобства использования, и может предотвращаться ощущение дискомфорта вследствие ухудшения удобства использования.
[0048] (2) На экране 70 регулирования целевой позиции для парковки для регулирования целевой позиции для парковки, целевая позиция для парковки отображается на втором изображении 71 окружения, передаваемом в оперативное устройство 7 из устройства 6 связи. Таким образом, водитель может легко подтверждать то, является или нет начальная позиция для целевой позиции для парковки, заданной посредством модуля 33 определения целевой позиции для парковки, соответствующей. Помимо этого, водитель может легко понимать позицию целевой позиции для парковки при точном регулировании целевой позиции для парковки в зависимости от ситуации.
[0049] (3) Когда ситуация связи является плохой, модуль 30 формирования изображений окружения уменьшает пиксельное разрешение второго изображения 71 окружения, которое должно передаваться в оперативное устройство 7 из устройства 6 связи, по сравнению с тем, когда ситуация связи является хорошей.
Посредством уменьшения пиксельного разрешения второго изображения 71 окружения, может уменьшаться объем связи для передачи второго изображения 71 окружения в оперативное устройство 7. Следовательно, когда ситуация связи является плохой, может уменьшаться задержка на передачу второго изображения 71 окружения.
Таким образом, например, для прокрутки второго изображения 71 окружения на экране 70 регулирования целевой позиции для парковки, проиллюстрированном на фиг. 3B, когда второе изображение 71 окружения передается в ответ на операцию на экране 70 регулирования целевой позиции для парковки, отставание при прокрутке вследствие задержки на передачу второго изображения 71 окружения может быть уменьшено.
Следовательно, предотвращается испытывание водителем ухудшения удобства использования вследствие отставания при прокрутке, и может предотвращаться ощущение дискомфорта вследствие ухудшения удобства использования.
[0050] Модифицированный пример
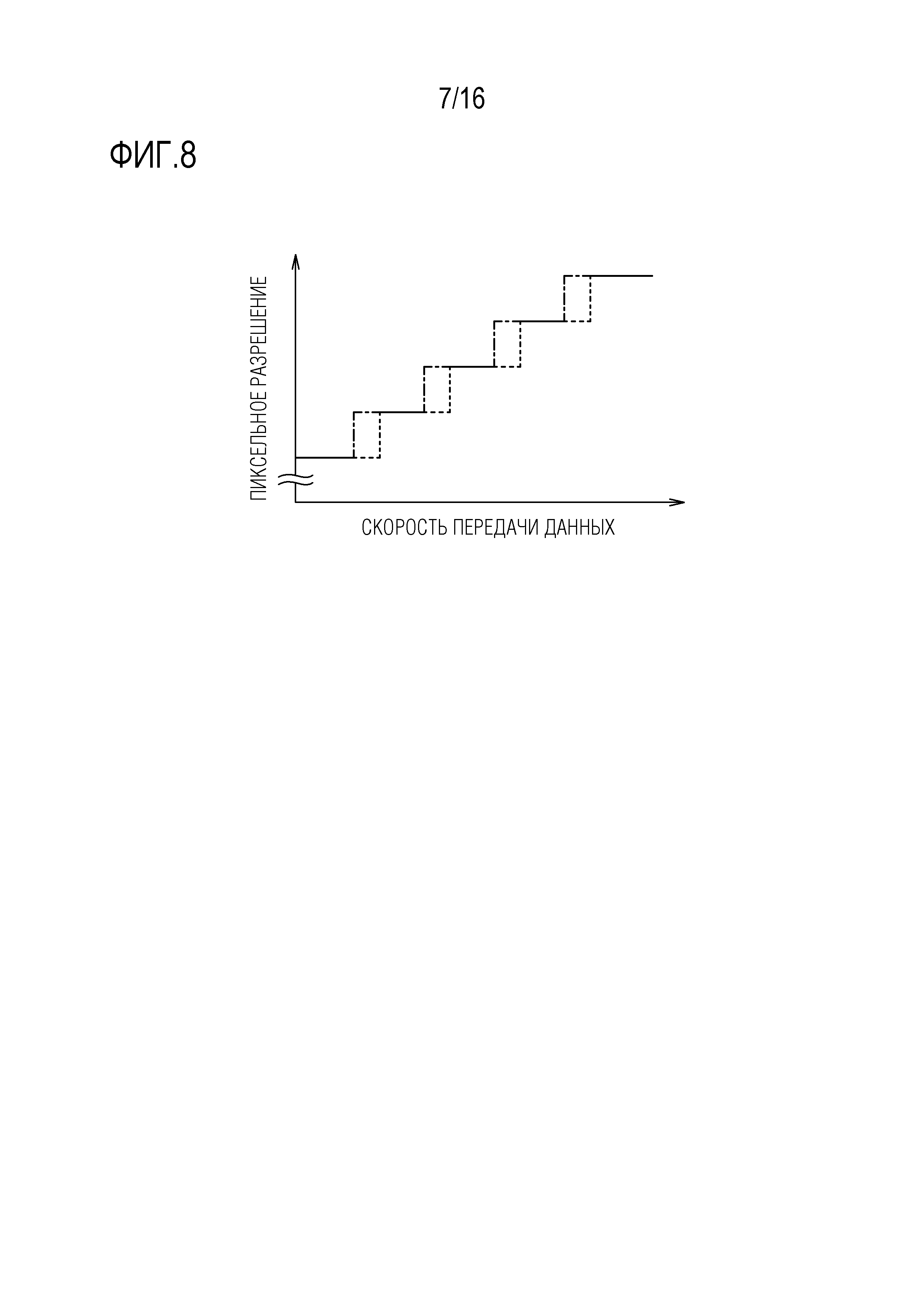
Модуль 30 формирования изображений окружения может изменять пиксельное разрешение второго изображения 71 окружения за несколько этапов из трех или более этапов в зависимости от скорости передачи данных. Например, пиксельное разрешение второго изображения 71 окружения может составлять ступенчатую функцию скорости передачи данных, и ступенчатая функция может иметь гистерезис.
Следует обратиться к фиг. 8. Пунктирная линия составляет ступенчатую функцию для определения пиксельного разрешения второго изображения 71 окружения, когда скорость передачи данных увеличивается, и штрихпунктирная линия составляет ступенчатую функцию для определения пиксельного разрешения второго изображения 71 окружения, когда скорость передачи данных уменьшается. Посредством вышеприведенного гистерезиса, предотвращается флуктуация пиксельного разрешения для незначительного увеличения или уменьшения скорости передачи данных, и второе изображение 71 окружения может становиться более видимым для пользователя.
[0051] Второй вариант осуществления
Далее описывается устройство 2 помощи при парковке согласно второму варианту осуществления. Устройство 2 помощи при парковке согласно второму варианту осуществления определяет ситуацию связи между оперативным устройством 7 и устройством 6 связи в текущем месте расположения транспортного средства 1 или оперативного устройства 7. Ситуация связи является плохой в зависимости от окружения при парковке, и, например, на многоуровневой парковке или в здании, окружения, окруженного посредством транспортных средств, и окружения около стены или столба, операция оператором иногда является неподходящей вследствие помех электромагнитной волны связи и плохой ситуации связи. Таким образом, текущее место расположения транспортного средства 1 обнаруживается, и в это время, определяется ситуация связи в обнаруженном месте расположения, например, то, представляет собой окружение при парковке или нет многоуровневую парковку, и то, составляет либо нет расстояние от неподвижного объекта, такого как стена или столб, предварительно определенное расстояние или менее. Таким образом, операция оператором может ограничиваться. Соответственно, операция может надежно ограничиваться. Помимо этого, при определении окружения при парковке, определение может выполняться на основе записи ситуации связи, определенной в идентичном месте ранее. Помимо этого, ситуация связи между оперативным устройством 7 и устройством 6 связи может определяться на основе ситуации связи, определенной посредством другого транспортного средства с использованием устройства помощи при парковке, аналогичного устройству 2 помощи при парковке, в текущем месте расположения транспортного средства 1 или оперативного устройства 7.
Таким образом, даже когда ситуация связи текущего места расположения транспортного средства 1 или оперативного устройства 7 является изменяемой, или затруднительно прогнозировать ситуацию связи в будущем из текущего результата определения, ситуация связи может прогнозироваться. В дальнейшем в этом документе, во втором варианте осуществления, из режимов, в которых ситуация связи определяется посредством места расположения транспортного средства, подробно описывается режим, в котором определение выполняется на основе записи ситуации связи, определенной в идентичном месте ранее.
[0052] Конфигурация устройства 2 помощи при парковке второго варианта осуществления является аналогичной функциональной конфигурации, проиллюстрированной на фиг. 1. При определении ситуации связи в текущем месте расположения, модуль 39 определения ситуации связи схемы 3 управления транспортного средства сохраняет информацию определенной ситуации связи в устройстве 16 хранения данных вместе с позиционной информацией, оцененной посредством модуля 31 оценки текущей позиции. Например, модуль 39 определения ситуации связи сохраняет информацию присутствия или отсутствия риска сбоя связи вместе с позиционной информацией.
Помимо этого, модуль 39 определения ситуации связи определяет то, сохраняется или нет результат определения ситуации связи, определенной ранее в месте, идентичном текущему месту расположения, в устройстве 16 хранения данных.
[0053] Когда предыдущий результат определения сохраняется в устройстве 16 хранения данных, модуль 39 определения ситуации связи определяет ситуацию связи в текущем месте расположения на основе предыдущего результата определения.
Например, модуль 39 определения ситуации связи может вычислять отношение числа раз, когда определяется то, что возникает риск сбоя связи, к числу предыдущих определений. Когда отношение числа раз, когда определяется то, что возникает риск сбоя связи, составляет пороговое значение A1 или более, может определяться то, что ситуация связи в текущем месте расположения является плохой, и возникает риск сбоя связи. Тем не менее, когда число предыдущих определений составляет пороговое значение B1 или менее, надежность определения на основе предыдущего результата определения является низкой, и в силу этого модуль 39 определения ситуации связи не определяет то, что возникает риск сбоя связи.
[0054] Следует обратиться к фиг. 9. Ссылка с номером 92 обозначает устройство помощи при парковке, аналогичное устройству 2 помощи при парковке. Устройство 92 помощи при парковке включает в себя схему 93 управления транспортного средства, группу 94 датчиков обнаружения окружающей ситуации, группу 95 актуаторов, устройство 96 связи и оперативное устройство 97. Схема 93 управления транспортного средства включает в себя модуль определения ситуации связи, аналогичный модулю 39 определения ситуации связи, и определяет ситуацию связи в месте расположения другого транспортного средства 91 или оперативного устройства 97. Устройство 96 связи передает результат определения ситуации связи на серверное устройство 99 через сеть 98 связи. Устройство 96 связи может непосредственно передавать результат определения в устройство 6 связи транспортного средства 1.
[0055] Устройство 6 связи принимает результат определения ситуации связи, измеряемой в другом транспортном средстве 91, из серверного устройства 99 или устройства 96 связи.
Модуль 39 определения ситуации связи определяет ситуацию связи в текущем месте расположения на основе результата определения ситуации связи, измеряемой в другом транспортном средстве 91, расположенном в месте, идентичном текущему месту расположения. Например, модуль 39 определения ситуации связи может вычислять отношение числа раз, когда определяется то, что возникает риск сбоя связи, к числу определений посредством другого транспортного средства 91. Когда отношение числа раз, когда определяется то, что возникает риск сбоя связи, составляет пороговое значение A2 или более, может определяться то, что ситуация связи в текущем месте расположения является плохой, и возникает риск сбоя связи. Тем не менее, когда число определений посредством другого транспортного средства 91 составляет пороговое значение B2 или менее, надежность определения на основе предыдущего результата определения является низкой, и в силу этого модуль 39 определения ситуации связи не определяет то, что возникает риск сбоя связи.
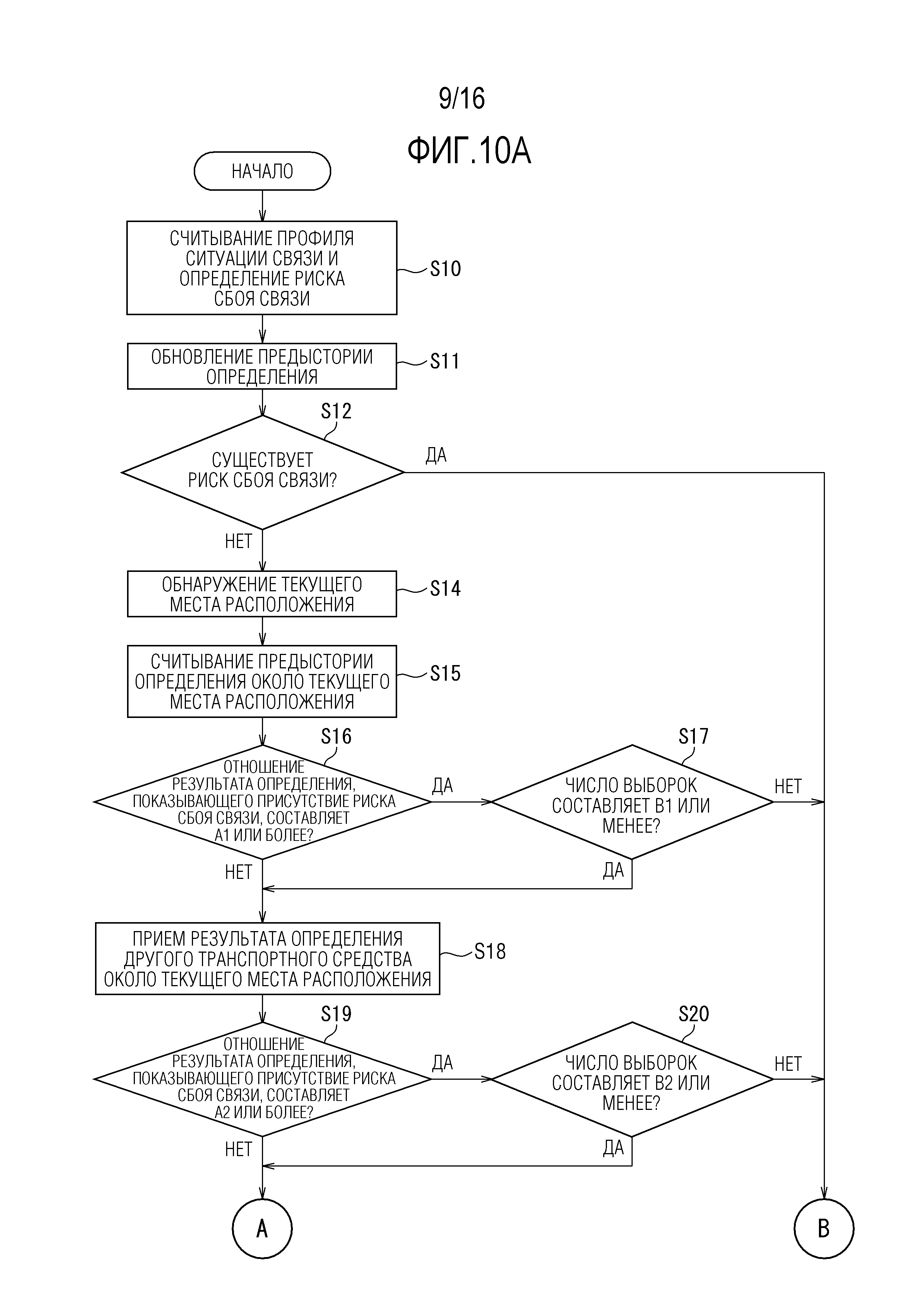
[0056] В дальнейшем описывается пример способа помощи согласно второму варианту осуществления со ссылкой на фиг. 10A и фиг. 10B. На этапе S10, модуль 39 определения ситуации связи считывает профиль ситуации связи и определяет то, возникает или нет риск сбоя связи. На этапе S11, модуль 39 определения ситуации связи сохраняет информацию присутствия или отсутствия риска сбоя связи в устройстве 16 хранения данных вместе с позиционной информацией.
Когда возникает риск сбоя связи (этап S12:Y), процесс переходит к этапу S13. Когда отсутствует риск сбоя связи (этап S12:N), процесс переходит к этапу S14.
На этапе S13, контроллер 20 запрещает переход к экрану 70 регулирования целевой позиции для парковки. После этого процесс заканчивается.
[0057] На этапе S14, модуль 31 оценки текущей позиции обнаруживает текущее место расположения транспортного средства 1.
На этапе S15, модуль 39 определения ситуации связи считывает предысторию результата определения ситуации связи, определенной ранее в близлежащем диапазоне текущего места расположения, из устройства 16 хранения данных. Близлежащий диапазон, например, может составлять диапазон в радиусе 10 метров, центрированный на текущем месте расположения.
На этапе S16, модуль 39 определения ситуации связи определяет то, составляет либо нет отношение числа раз, когда определяется то, что возникает риск сбоя связи ранее, пороговое значение A1 или более. Когда отношение числа раз, когда определяется то, что возникает риск сбоя связи, составляет пороговое значение A1 или более (этап S16:Y), процесс переходит к этапу S17. Когда отношение числа раз, когда определяется то, что возникает риск сбоя связи, меньше порогового значения A1 (этап S16:N), процесс переходит к этапу S18.
[0058] На этапе S17, модуль 39 определения ситуации связи определяет то, составляет либо нет число предыдущих определений (т.е. число выборок) пороговое значение B1 или менее. Когда число определений составляет пороговое значение B1 или менее (этап S17:Y), процесс переходит к этапу S18. Когда число предыдущих определений превышает пороговое значение B1 (этап S17:N), процесс переходит к этапу S13.
На этапе S18, результат определения ситуации связи, определенной посредством другого транспортного средства 91 в близлежащем диапазоне текущего места расположения, принимается.
[0059] На этапе S19, модуль 39 определения ситуации связи определяет то, составляет либо нет отношение числа раз, когда определяется то, что возникает риск сбоя связи посредством другого транспортного средства 91, пороговое значение A2 или более. Когда отношение числа раз, когда определяется то, что возникает риск сбоя связи, составляет пороговое значение A2 или более (этап S19:Y), процесс переходит к этапу S20. Когда отношение числа раз, когда определяется то, что возникает риск сбоя связи, меньше порогового значения A2 (этап S19:N), процесс переходит к этапу S21.
На этапе S20, модуль 39 определения ситуации связи определяет то, составляет либо нет число определений посредством другого транспортного средства 91 (т.е. число выборок) пороговое значение B2 или менее. Когда число определений посредством другого транспортного средства 91 составляет пороговое значение B2 или менее (этап S20:Y), процесс переходит к этапу S21. Когда число определений посредством другого транспортного средства 91 превышает пороговое значение B2 (этап S20:N), процесс переходит к этапу S13.
Процесс этапов S21-S24 является аналогичным этапам S4-S7 по фиг. 7.
[0060] Преимущества второго варианта осуществления
(1) Модуль 31 оценки текущей позиции обнаруживает текущее место расположения транспортного средства 1. В это время, определяется ситуация связи в обнаруженном месте расположения, например, то, представляет собой окружение при парковке или нет многоуровневую парковку, и то, составляет либо нет расстояние от неподвижного объекта, такого как стена или столб, предварительно определенное расстояние или менее. Соответственно, операция оператором может надежно ограничиваться в окружении, в котором ситуация связи является плохой. Обычно, в случае многоуровневой парковки, либо в случае, если расстояние от неподвижного объекта, такого как стена или столб, составляет предварительно определенное расстояние или менее, ситуация связи является плохой, и операция оператором является неподходящей. В таком случае, операция оператором может ограничиваться.
(2) Модуль 31 оценки текущей позиции обнаруживает текущее место расположения транспортного средства 1. Модуль 39 определения ситуации связи определяет то, сохраняется или нет результат определения ситуации связи, определенной ранее в месте, идентичном обнаруженному месту расположения, в устройстве 16 хранения данных. Когда предыдущий результат определения сохраняется в устройстве 16 хранения данных, модуль 39 определения ситуации связи определяет ситуацию связи в текущем месте расположения на основе результата определения.
Таким образом, даже когда ситуация связи текущего места расположения транспортного средства 1 является изменяемой, и затруднительно прогнозировать ситуацию связи в будущем из текущего результата определения, ухудшение характеристик в ситуации связи может прогнозироваться.
[0061] (3) Модуль 31 оценки текущей позиции обнаруживает текущее место расположения транспортного средства 1. Устройство 6 связи принимает результат определения ситуации связи, определенной между устройством 96 связи, смонтированным на другом транспортном средстве 91, и оперативным устройством 97, существующим за пределами другого транспортного средства 91, в месте, идентичном обнаруженному месту расположения, из устройства 96 связи или серверного устройства 99. Модуль 39 определения ситуации связи определяет ситуацию связи в текущем месте расположения на основе результата определения.
Таким образом, даже когда ситуация связи текущего места расположения транспортного средства 1 является изменяемой, и затруднительно прогнозировать ситуацию связи в будущем из текущего результата определения, ухудшение характеристик в ситуации связи может прогнозироваться.
[0062] Третий вариант осуществления
Далее описывается устройство 2 помощи при парковке согласно третьему варианту осуществления. Оперативное устройство 7 устройства 2 помощи при парковке согласно третьему варианту осуществления изменяет укрупнение отображения второго изображения 71 окружения, отображаемого на экране 70 регулирования целевой позиции для парковки, проиллюстрированном на фиг. 3B, в ответ на операцию водителем.
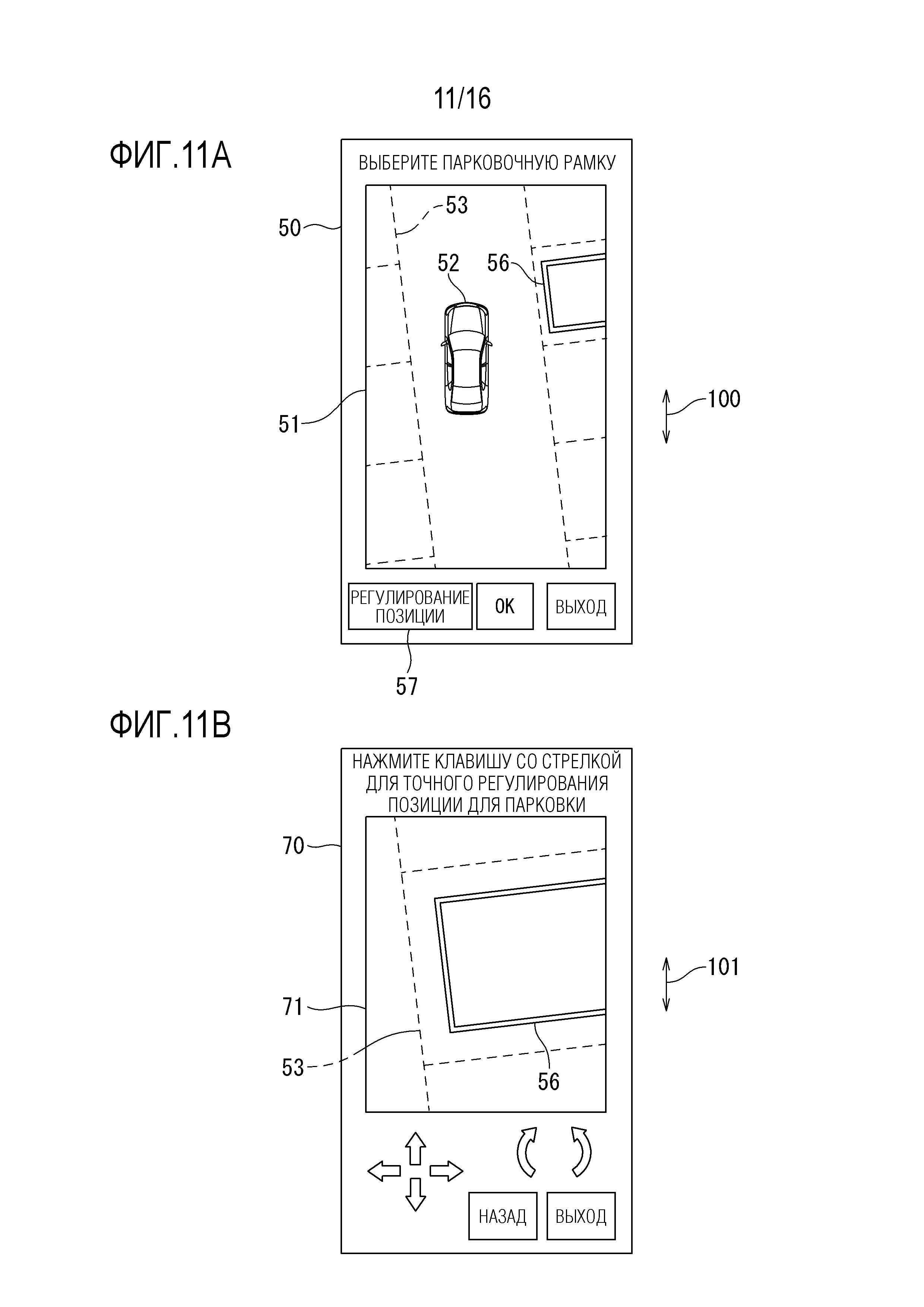
Следует обратиться к фиг. 11A, фиг. 11B и фиг. 12A. Когда кнопка 57 "Регулирование позиции" нажимается на экране 50 выбора парковочной рамки, проиллюстрированном на фиг. 11A, экран 70 регулирования целевой позиции для парковки, проиллюстрированный на фиг. 11B, отображается на оперативном устройстве 7.
Укрупнение отображения второго изображения 71 окружения вскоре после перехода к экрану 70 регулирования целевой позиции для парковки задается в качестве начального укрупнения D0.
[0063] Следует отметить, что стрелка 100 указывает направление спереди назад транспортного средства 1 в первом изображении 51 окружения, проиллюстрированном на фиг. 11A, и стрелка 101 указывает направление спереди назад транспортного средства 1 во втором изображении 71 окружения, проиллюстрированном на фиг. 11B.
Как проиллюстрировано на чертежах, в примерах первого изображения 51 окружения, проиллюстрированного на фиг. 11A, и второго изображения 71 окружения, проиллюстрированного на фиг. 11B, разделительные линии 53 на поверхности дороги, указывающей парковочные рамки, являются наклонными относительно направления спереди назад и направления ширины транспортного средства для транспортного средства 1. Таким образом, когда направление спереди назад транспортного средства 1 совмещается с направлением по длине первого изображения 51 окружения и второго изображения 71 окружения, разделительные линии 53 являются наклонными относительно направления по длине и поперечного направления первого изображения 51 окружения и второго изображения 71 окружения.
[0064] Когда водитель выполняет операцию изменения укрупнения отображения второго изображения 71 окружения на экране 70 регулирования целевой позиции для парковки, укрупнение отображения второго изображения 71 окружения изменяется. Операция изменения укрупнения отображения, например, может представлять собой операцию разведения и операцию сведения, выполняемую для второго изображения 71 окружения. Альтернативно, укрупнение отображения может изменяться посредством нажатия кнопки, колесика и поворотного переключателя на GUI, предоставленном на экране 70 регулирования целевой позиции для парковки или физически предоставленном в оперативном устройстве 7.
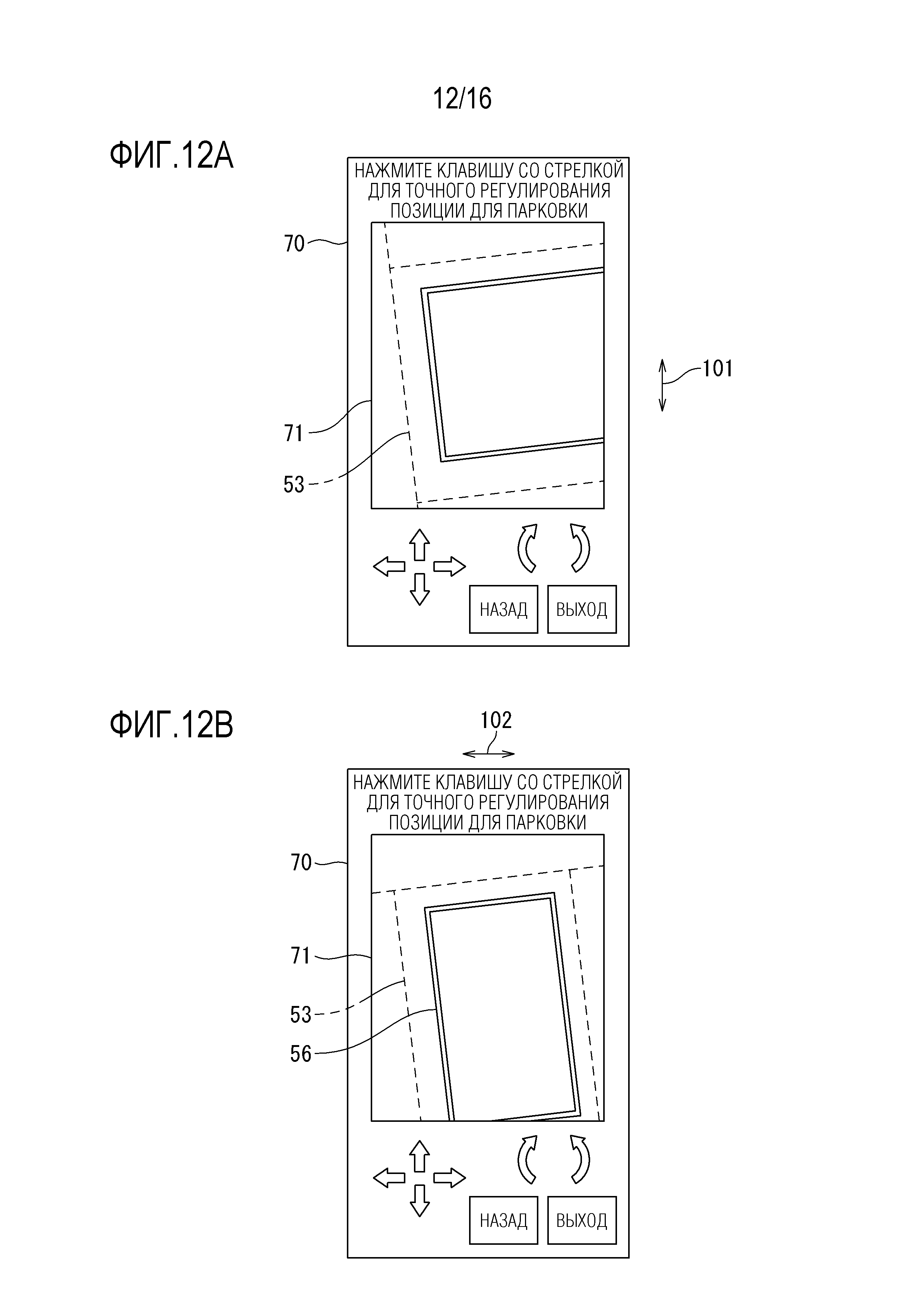
[0065] Например, посредством операции для увеличения укрупнения отображения второго изображения 71 окружения, укрупнение отображения второго изображения 71 окружения увеличивается, как проиллюстрировано на фиг. 12A.
Когда укрупнение отображения второго изображения 71 окружения является более высоким, ширина поля видимости, выражаемая посредством одного пиксела устройства 22 отображения, становится меньшей, и в силу этого состояние целевой позиции для парковки может поминутно отображаться. Таким образом, когда число перемещающихся пикселов метки 56 позиции для парковки для однократной операции клавиши 72 управления курсором не изменяется, даже когда укрупнение отображения изменяется, целевая позиция для парковки может регулироваться более точно.
[0066] Здесь, угол между продольным направлением метки 56 позиции для парковки и продольным направлением диапазона второго изображения 71 окружения на экране 70 регулирования целевой позиции для парковки меньше, метке 56 позиции для парковки становится затруднительно выступать из диапазона отображения второго изображения 71 окружения.
Таким образом, как проиллюстрировано на фиг. 12B, угол между продольным направлением метки 56 позиции для парковки и продольным направлением диапазона отображения второго изображения 71 окружения может уменьшаться посредством вращения второго изображения 71 окружения. Например, когда угол между продольным направлением метки 56 позиции для парковки и продольным направлением диапазона отображения второго изображения 71 окружения составляет 45° или более, второе изображение 71 окружения может вращаться на 90°.
Здесь, стрелка 102 указывает направление спереди назад транспортного средства 1. Посредством ограничения угла вращения второго изображения 71 окружения 90°, направление второго изображения 71 окружения может ограничиваться таким образом, что направление спереди назад транспортного средства 1 становится одним из направления сверху вниз и направления справа налево. Таким образом, водитель может легко понимать направление транспортного средства 1, даже когда значок 52 транспортного средства 1 не отображается на втором изображении 71 окружения.
[0067] Когда ширина поля видимости одного пиксела второго изображения 71 окружения становится больше ширины поля видимости, соответствующей одному пикселу устройства 22 отображения, вследствие увеличения укрупнения отображения, несколько пикселов устройства 22 отображения отображают идентичный пиксел второго изображения 71 окружения. Таким образом, даже когда укрупнение отображения увеличивается, разрешение отображения второго изображения 71 окружения, которое должно отображаться на устройстве 22 отображения, не увеличивается, и в силу этого точность регулирования целевой позиции для парковки не может увеличиваться.
[0068] Чтобы не допускать того, чтобы ширина поля видимости одного пиксела второго изображения 71 окружения становилась больше ширины поля видимости, соответствующей одному пикселу устройства 22 отображения, даже когда укрупнение отображения второго изображения 71 окружения увеличивается, второе изображение 71 окружения, имеющее высокое пиксельное разрешение, должно передаваться в оперативное устройство 7.
Тем не менее, объем связи увеличивается посредством передачи изображения, имеющей высокое пиксельное разрешение, и в силу этого задержка на передачу формируется, когда ситуация связи является плохой. Когда задержка на передачу второго изображения 71 окружения формируется, задержка отображения второго изображения 71 окружения и отставание при прокрутке формируются, и водитель ощущает ухудшение удобства использования.
Следовательно, когда ситуация связи не удовлетворяет предварительно определенному условию разрешения, устройство 2 помощи при парковке согласно третьему варианту осуществления запрещает операцию для задания укрупнения отображения второго изображения 71 окружения, которое должно отображаться на экране 70 регулирования целевой позиции для парковки, большим начального укрупнения D0.
[0069] Конфигурация устройства 2 помощи при парковке третьего варианта осуществления является аналогичной функциональной конфигурации, проиллюстрированной на фиг. 1. Модуль 39 определения ситуации связи схемы 3 управления транспортного средства определяет то, удовлетворяет или нет ситуация связи между устройством 6 связи и оперативным устройством 7 предварительно определенному условию разрешения. Например, когда скорость передачи данных составляет пороговое значение C или более, модуль 39 определения ситуации связи может определять то, что предварительно определенное условие разрешения удовлетворяется.
Модуль 39 определения ситуации связи выводит информацию результата определения в устройство 6 связи. Устройство 6 связи передает информацию результата определения в оперативное устройство 7.
Альтернативно, модуль 39 определения ситуации связи может выводить информацию ситуации связи между устройством 6 связи и оперативным устройством 7 в устройство 6 связи, и устройство 6 связи может передавать информацию ситуации связи в оперативное устройство 7. После этого, то, удовлетворяет или нет ситуация связи предварительно определенному условию разрешения, может определяться посредством модуля 82 приема операций оперативного устройства 7.
[0070] Когда ситуация связи удовлетворяет предварительно определенному условию разрешения, модуль 82 приема операций разрешает операцию для задания укрупнения отображения второго изображения 71 окружения большим начального укрупнения D0. Напротив, когда ситуация связи не удовлетворяет предварительно определенному условию разрешения, модуль 82 приема операций запрещает операцию для задания укрупнения отображения второго изображения 71 окружения большим начального укрупнения D0.
Когда ситуация связи удовлетворяет предварительно определенному условию разрешения, модуль 30 формирования изображений окружения схемы 3 управления транспортного средства может задавать пиксельное разрешение второго изображения 71 окружения, которое должно передаваться в оперативное устройство 7 из устройства 6 связи, в зависимости от максимального числа отображаемых пикселов устройства 22 отображения оперативного устройства 7. Следует обратиться к фиг. 13. Когда максимальное число отображаемых пикселов устройства 22 отображения больше, модуль 30 формирования изображений окружения может формировать второе изображение 71 окружения, имеющее более высокое пиксельное разрешение. Более конкретно, пиксельное разрешение второго изображения окружения, которое должно передаваться в оперативное устройство 7 из устройства 6 связи, может задаваться более высоким по мере того, как максимальное число отображаемых пикселов устройства 22 отображения больше.
Посредством задания пиксельного разрешения второго изображения 71 окружения более высоким по мере того, как максимальное число отображаемых пикселов больше, разрешение отображения второго изображения 71 окружения, которое должно отображаться на устройстве 22 отображения, становится более высоким в оперативном устройстве 7, в котором максимальное число отображаемых пикселов больше, и более точное регулирование целевой позиции для парковки становится возможным.
[0071] Когда ситуация связи удовлетворяет предварительно определенному условию разрешения, модуль 81 управления отображением оперативного устройства 7 уменьшает угол между продольным направлением метки 56 позиции для парковки и продольным направлением диапазона отображения второго изображения 71 окружения на экране 70 регулирования целевой позиции для парковки посредством вращения второго изображения 71 окружения, как проиллюстрировано на фиг. 12B.
Соответственно, метке 56 позиции для парковки становится затруднительно выступать из диапазона отображения второго изображения 71 окружения, даже когда укрупнение отображения второго изображения 71 окружения увеличивается.
[0072] Далее описывается пример процесса, когда кнопка 57 "Регулирование позиции" экрана 50 выбора парковочной рамки нажимается, со ссылкой на фиг. 14.
На этапе S30, модуль 82 приема операций определяет то, нажимается или нет кнопка 57 "Регулирование позиции". Когда кнопка 57 "Регулирование позиции" нажимается (этап S30:Y), процесс переходит к этапу S31. Когда кнопка 57 "Регулирование позиции" не нажимается (этап S30:N), процесс возвращается к этапу S30.
[0073] На этапе S31, модуль 82 приема операций определяет то, составляет либо нет скорость передачи данных между устройством 6 связи и оперативным устройством 7 пороговое значение C или более. Когда скорость передачи данных меньше порогового значения C (этап S31:N), процесс переходит к этапу S32. Когда скорость передачи данных составляет пороговое значение C или более (этап S31:Y), процесс переходит к этапу S33.
На этапе S32, модуль 82 приема операций задает верхний предел DU укрупнения отображения второго изображения 71 окружения равным начальному значению D0. Соответственно, операция для задания укрупнения отображения второго изображения 71 окружения большим начального укрупнения D0 запрещается. После этого процесс переходит к этапу S36.
[0074] На этапе S33, модуль 82 приема операций задает верхний предел DU укрупнения отображения второго изображения 71 окружения равным D1, большему начального значения D0. Соответственно, операция для задания укрупнения отображения второго изображения 71 окружения большим начального укрупнения D0 разрешается.
На этапе S34, модуль 81 управления отображением определяет то, составляет либо нет угол между продольным направлением диапазона второго изображения 71 окружения на экране 70 регулирования целевой позиции для парковки и продольным направлением метки 56 позиции для парковки 45° или более. Когда вышеописанный угол составляет 45° или более (этап S34:Y), процесс переходит к этапу S35. Когда вышеописанный угол меньше 45° (этап S34:N), процесс переходит к этапу S36.
[0075] На этапе S35, модуль 81 управления отображением уменьшает угол между продольным направлением диапазона второго изображения 71 окружения на экране 70 регулирования целевой позиции для парковки и продольным направлением метки 56 позиции для парковки посредством вращения второго изображения 71 окружения на 90°. После этого процесс переходит к этапу S35.
На этапе S36, модуль 81 управления отображением осуществляет переход экрана, который должен отображаться на устройстве 22 отображения, к экрану 70 регулирования целевой позиции для парковки. После этого процесс заканчивается.
[0076] Далее описывается пример процесса изменения укрупнения отображения второго изображения 71 окружения со ссылкой на фиг. 15.
На этапе S41, модуль 82 приема операций определяет то, обнаруживается или нет операция разведения на втором изображении 71 окружения. Когда операция разведения обнаруживается (этап S41:Y), процесс переходит к этапу S42. Когда операция разведения не обнаруживается (этап S41:N), процесс переходит к этапу S45.
На этапе S42, модуль 82 приема операций определяет то, составляет или нет текущее укрупнение отображения второго изображения 71 окружения верхний предел DU.
[0077] Когда укрупнение отображения составляет верхний предел DU (этап S42:Y), процесс переходит к этапу S44. Когда укрупнение отображения меньше верхнего предела DU (этап S42:N), процесс переходит к этапу S43.
На этапе S43, модуль 81 управления отображением увеличивает укрупнение отображения второго изображения 71 окружения на ΔD1. После этого процесс переходит к этапу S45.
На этапе S44, модуль 81 управления отображением поддерживает укрупнение отображения второго изображения 71 окружения равным верхнему пределу DU. После этого процесс переходит к этапу S45.
[0078] На этапе S45, модуль 82 приема операций определяет то, обнаруживается или нет операция сведения на втором изображении 71 окружения. Когда операция сведения обнаруживается (этап S45:Y), процесс переходит к этапу S46. Когда операция сведения не обнаруживается (этап S45:N), процесс заканчивается.
На этапе S46, модуль 82 приема операций определяет то, составляет или нет текущее укрупнение отображения второго изображения 71 окружения нижний предел DL.
[0079] Когда укрупнение отображения составляет нижний предел DL (этап S46:Y), процесс переходит к этапу S48. Когда укрупнение отображения превышает нижний предел DL (этап S46:N), процесс переходит к этапу S47.
На этапе S47, модуль 81 управления отображением уменьшает укрупнение отображения второго изображения 71 окружения на ΔD2. После этого процесс заканчивается.
На этапе S48, модуль 81 управления отображением поддерживает укрупнение отображения второго изображения 71 окружения равным нижнему пределу DL. После этого процесс заканчивается.
[0080] Преимущества третьего варианта осуществления
(1) Когда ситуация связи не удовлетворяет предварительно определенному условию разрешения, модуль 82 приема операций запрещает операцию для увеличения укрупнения отображения второго изображения 71 окружения, которое должно отображаться на экране 70 регулирования целевой позиции для парковки. Соответственно, предотвращается задержка на передачу, сформированная посредством передачи второго изображения 71 окружения, имеющего высокое пиксельное разрешение, когда ситуация связи является плохой. Следовательно, может уменьшаться ухудшение удобства использования, которое ощущает водитель, такое как задержка отображения второго изображения 71 окружения и отставание при прокрутке.
[0081] (2) Когда ситуация связи удовлетворяет предварительно определенному условию разрешения, модуль 30 формирования изображений окружения задает пиксельное разрешение второго изображения 71 окружения, которое должно передаваться в оперативное устройство 7 из устройства 6 связи, более высоким по мере того, как максимальное число пикселов устройства 22 отображения оперативного устройства 7, больше. Соответственно, оперативное устройство 7, в котором максимальное число отображаемых пикселов является большим, отображает второе изображение 71 окружения, имеющее более высокое разрешение отображения, и более точное регулирование целевой позиции для парковки становится возможным.
[0082] (3) Когда ситуация связи удовлетворяет предварительно определенному условию разрешения, модуль 81 управления отображением уменьшает угол между продольным направлением метки 56 позиции для парковки и продольным направлением диапазона второго изображения 71 окружения на экране 70 регулирования целевой позиции для парковки посредством вращения второго изображения 71 окружения, которое должно отображаться на экране 70 регулирования целевой позиции для парковки. Соответственно, метке 56 позиции для парковки становится затруднительно выступать из диапазона отображения второго изображения 71 окружения, даже когда укрупнение отображения второго изображения 71 окружения увеличивается, и в силу этого становится легко увеличивать укрупнение отображения.
[0083] Модифицированный пример
Когда ситуация связи удовлетворяет предварительно определенному условию разрешения, модуль 81 управления отображением оперативного устройства 7 может уменьшать угол между продольным направлением метки 56 позиции для парковки и продольным направлением диапазона отображения второго изображения 71 окружения посредством вращения второго изображения 71 окружения под углом, отличным от 90°.
Следует обратиться к фиг. 16. Например, модуль 81 управления отображением может вращать второе изображение 71 окружения таким образом, что продольное направление метки 56 позиции для парковки является параллельным продольному направлению диапазона отображения второго изображения 71 окружения. Следовательно, как указано посредством стрелки 102, направление спереди назад транспортного средства 1 иногда наклоняется относительно направления по длине и поперечного направления второго изображения 71 окружения.
Заставляя продольное направление метки 56 позиции для парковки быть параллельной продольному направлению диапазона отображения второго изображения 71 окружения, метка 56 позиции для парковки становится трудной выступать из диапазона отображения второго изображения 71 окружения, и в силу этого укрупнение отображения становится легче увеличиваться.
[0084] Все примеры и условный язык, предоставленные в данном документе, служат в педагогических целях для помощи читателю в понимании изобретения и принципов, вносимых автором изобретения в область техники, и не должны истолковываться в качестве ограничений на такие конкретно изложенные примеры и условия, и также организация таких примеров в описании изобретения не связана с демонстрацией преимуществ и недостатков изобретения. Хотя выше подробно описаны один или более вариантов осуществления настоящего изобретения, следует понимать, что различные изменения, замены и модификации могут вноситься в них без отступления от сущности и объема изобретения.
Список номеров ссылок
[0085] 1 - транспортное средство, 2 - устройство помощи при парковке, 3 - схема управления транспортного средства, 4 - группа датчиков обнаружения окружающей ситуации, 5 - группа актуаторов, 6 - устройство связи, 7 - оперативное устройство, 10 - камера, 11 - датчик измерения расстояния, 12 - актуатор рулевого управления, 13 - актуатор открытия акселератора, 14 - актуатор управления тормозом, 15 - процессор, 16 - устройство хранения данных, 20 - контроллер, 21 - схема связи, 22 - устройство отображения, 23 - интерфейс, 24 - процессор, 25 - устройство хранения данных, 30 - модуль формирования изображений окружения, 31 - модуль оценки текущей позиции, 32 - модуль задания начальной позиции, 33 - модуль определения целевой позиции для парковки, 34 - модуль формирования траектории, 35 - модуль управления следованием пути, 36 - модуль управления рулением, 37 - модуль задания целевой скорости, 38 - модуль управления скоростью, 39 - модуль определения ситуации связи, 50 - экран выбора парковочной рамки, 51 - первое изображение окружения, 56 - метка позиции для парковки, 70 - экран регулирования целевой позиции для парковки, 71 - второе изображение окружения, 80 - модуль выполнения процесса связи, 81 - модуль управления отображением, 82 - модуль приема операций, 83 - модуль задания управляющих команд
Реферат
Изобретение относится к системам помощи при парковке. Способ помощи при парковке для приема операции оператором из-за пределов транспортного средства и выполнения автоматической парковки в целевой позиции для парковки. Способ помощи при парковке содержит этапы, на которых определяют ситуацию связи между оперативным устройством и устройством связи, ограничивают операцию для регулирования вручную целевой позиции для парковки в парковочной рамке в оперативном устройстве в зависимости от ситуации связи после приема операции для выбора парковочной рамки, в которой должно парковаться транспортное средство, когда определяется то, что существует риск сбоя связи в ситуации связи, и выполняют автоматическую парковку в заданной целевой позиции для парковки. Оперативное устройство выполнено с возможностью принимать операцию и передавать сигнал инструкции, соответствующий операции. Устройство связи смонтировано на транспортном средстве и выполнено с возможностью принимать сигнал инструкции от оперативного устройства. Достигается повышение безопасности управления транспортным средством при парковке. 4 н. и 9 з.п. ф-лы. 20 ил.
Формула
Документы, цитированные в отчёте о поиске
Система помощи руления при парковке и способ ее эксплуатации
Комментарии