Способ управления парковкой и оборудование управления парковкой - RU2719106C1
Код документа: RU2719106C1
Чертежи









Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления парковкой и к оборудованию управления парковкой.
Уровень техники
[0002] Относительно этого вида технологии, известно оборудование управления парковкой, которое работает извне транспортного средства и управляет транспортным средством с возможностью парковаться (патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. WO2014/162753
Сущность изобретения
Проблемы, решаемые изобретением
[0004] Тем не менее, в патентном документе 1, схемы парковки, когда пассажир (водитель или пассажир) присутствует в салоне транспортного средства, и когда пассажиры не находятся внутри салона транспортного средства, не изучаются.
[0005] Проблема, которая должна решаться посредством настоящего изобретения, заключается в том, чтобы парковать транспортное средство с содержимым управления в соответствии с тем, присутствует или нет пассажир в салоне транспортного средства.
Средство решения задач
[0006] Настоящее изобретение решает вышеуказанную задачу посредством управления транспортным средством в соответствии с результатом определения того, присутствует или нет пассажир в салоне транспортного средства.
Преимущества изобретения
[0007] Согласно настоящему изобретению, транспортное средство может парковаться с содержимым управления в соответствии с тем, присутствует или нет пассажир в салоне транспортного средства.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей пример системы управления парковкой согласно одному или более вариантам осуществления настоящего изобретения.
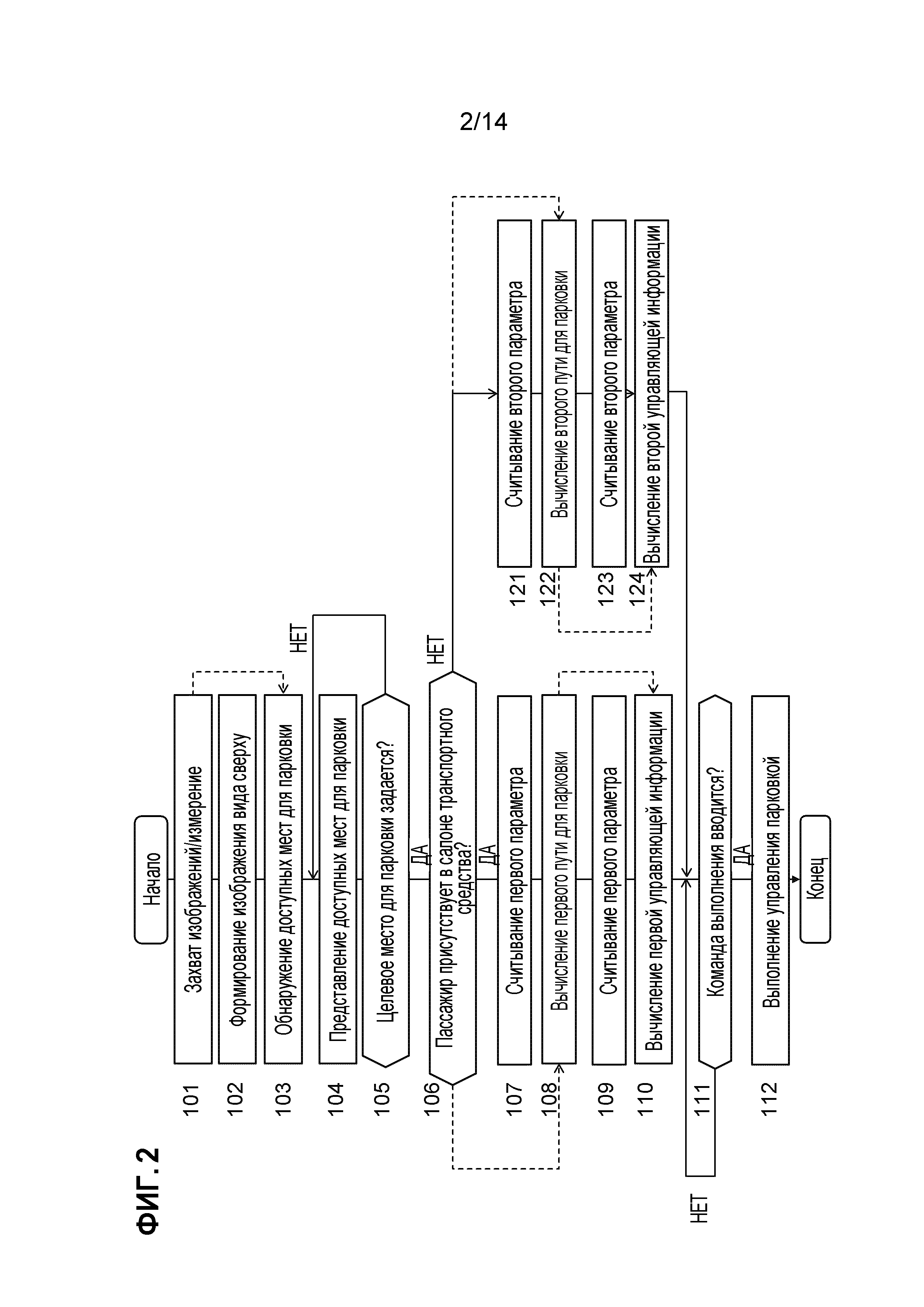
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры управления в системе управления парковкой согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 3 является таблицей, иллюстрирующей пример параметров, используемых при вычислении целевого пути согласно одному или более вариантов осуществления настоящего изобретения.
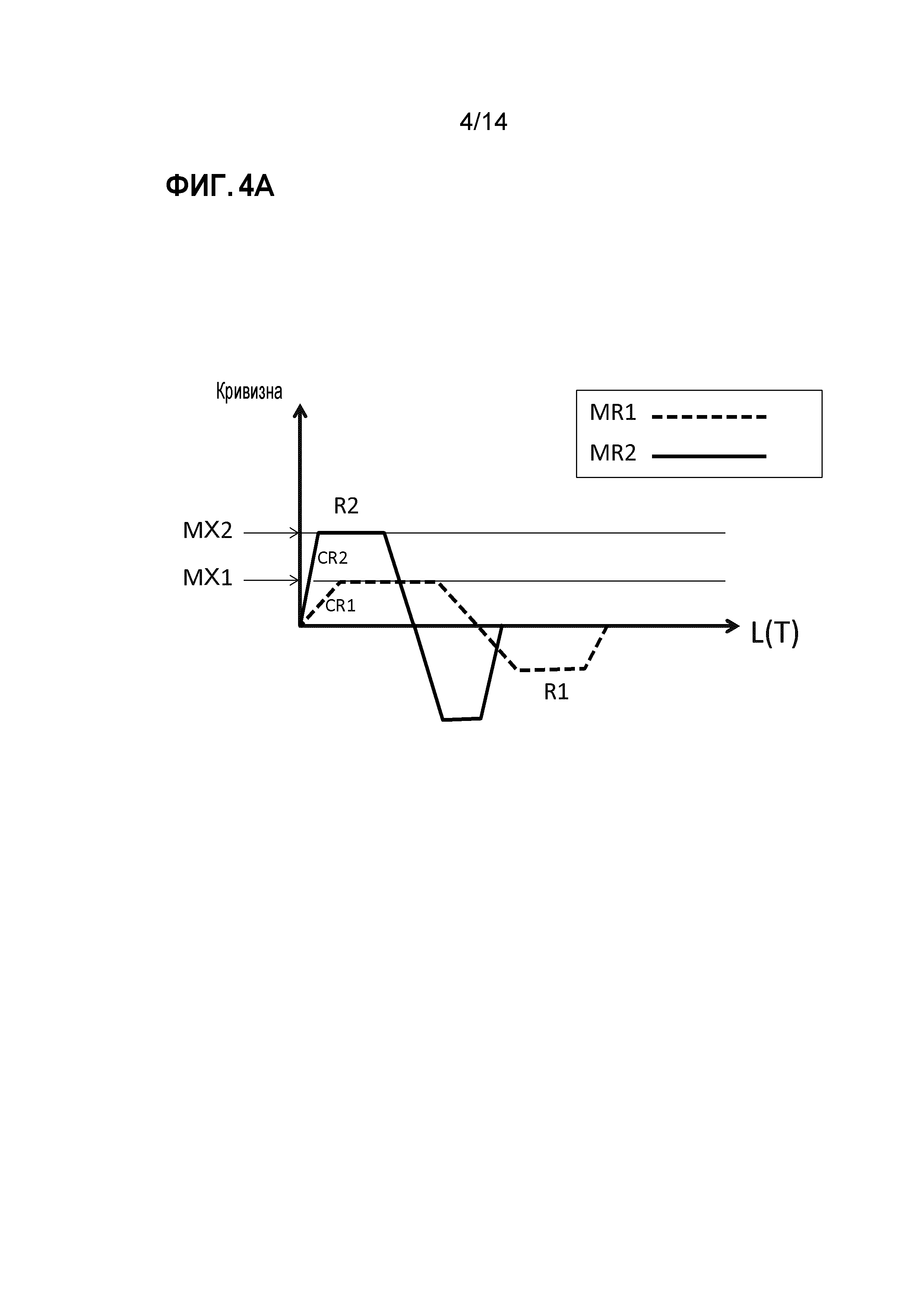
Фиг. 4A является графиком, иллюстрирующим кривизну пути для парковки, вычисленного с использованием первого и второго параметров.
Фиг. 4B является видом, иллюстрирующим пример пути для парковки, вычисленного с использованием первого и второго параметров.
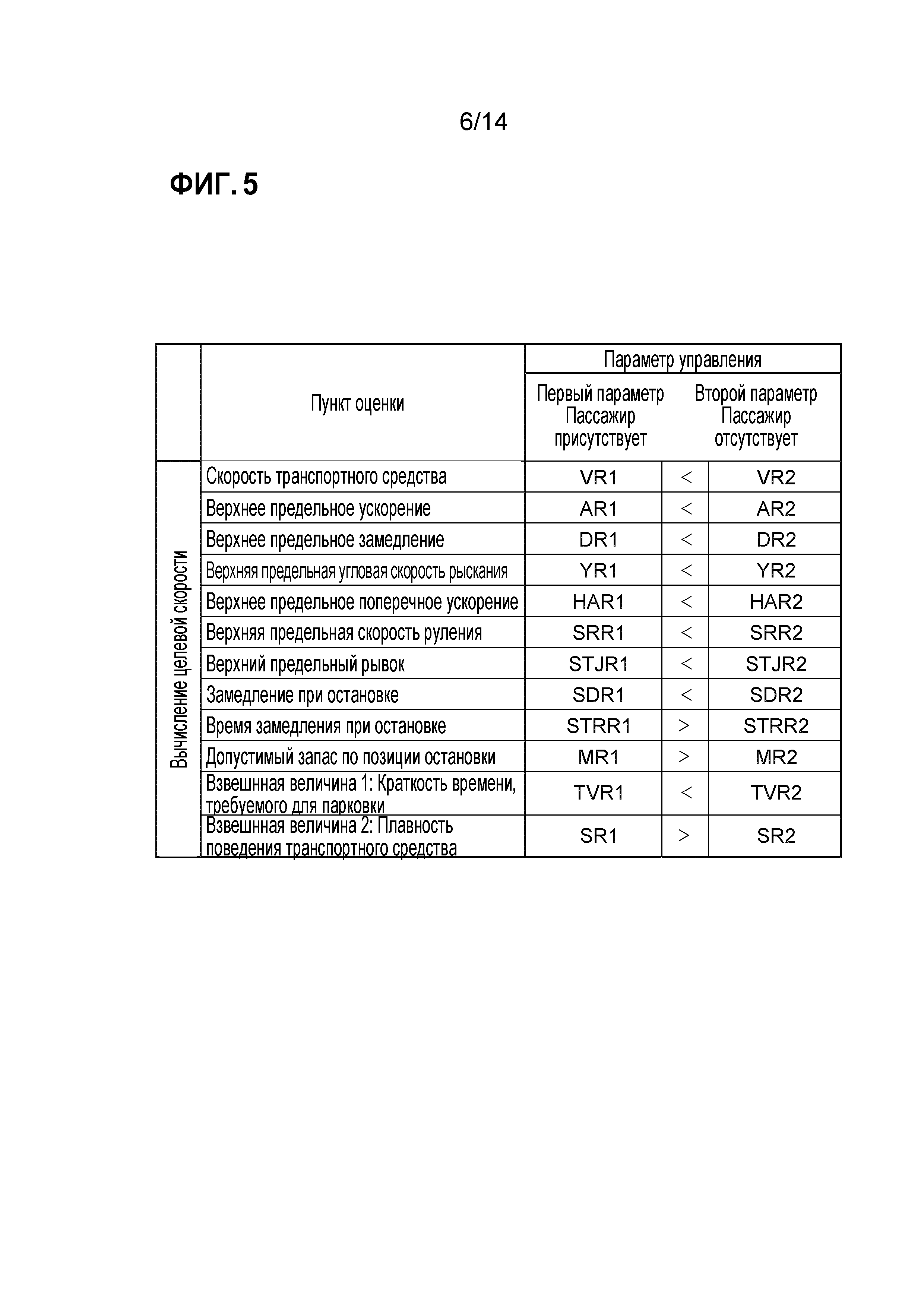
Фиг. 5 является таблицей, иллюстрирующей пример параметров, используемых при вычислении целевой скорости согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 6 является графиком, иллюстрирующим изменение целевой скорости при замедлении.
Фиг. 7 является схемой, иллюстрирующей пример задания допустимого запаса по расстоянию до целевой точки парковки.
Фиг. 8 является схемой для описания условий первого моделирования согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 9A является набором графиков (a)-(e), иллюстрирующих взаимосвязь между первым параметром и временем операции парковки в одном или более вариантов осуществления настоящего изобретения.
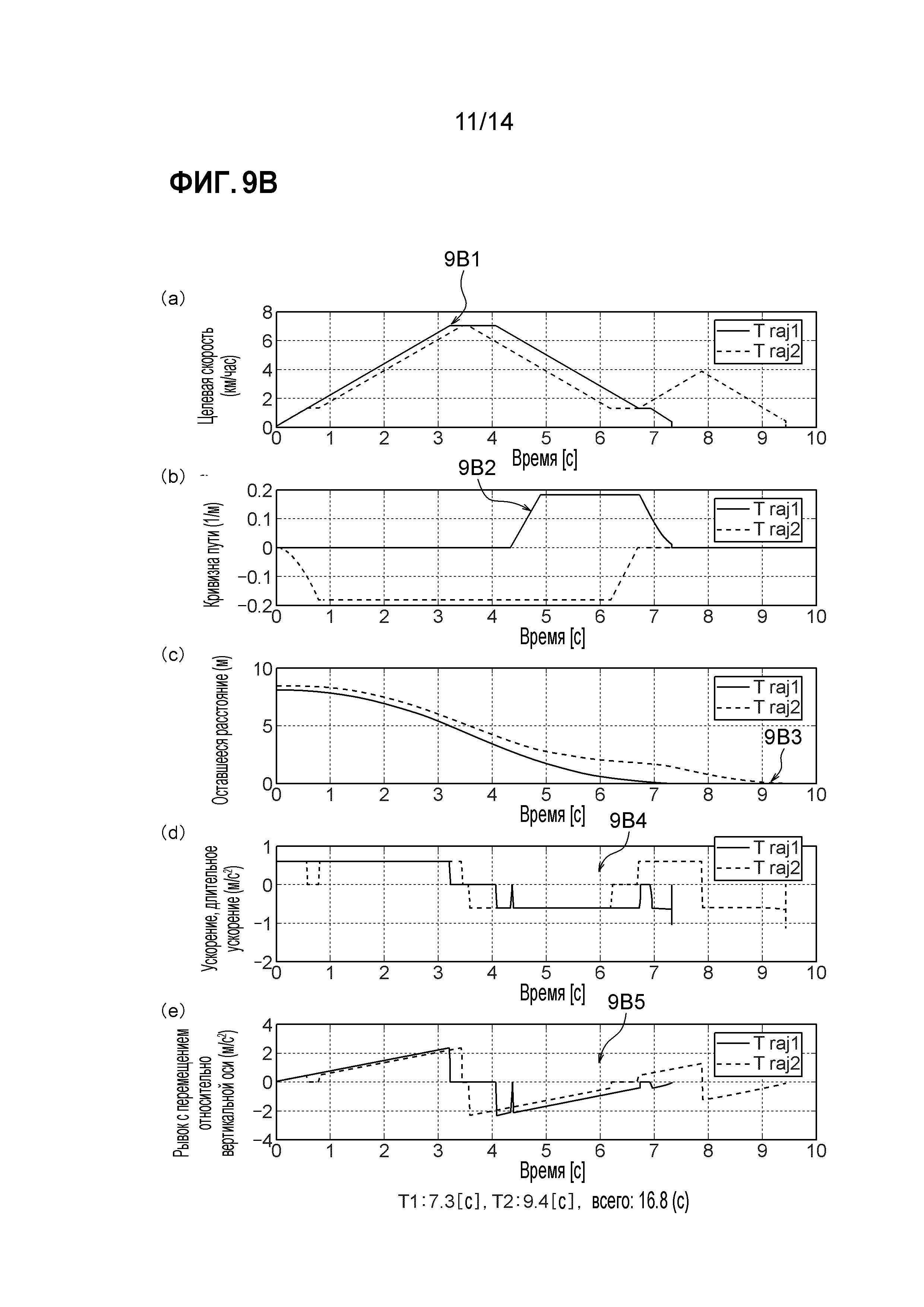
Фиг. 9B является набором графиков (a)-(e), иллюстрирующих взаимосвязь между вторым параметром и временем операции парковки в одном или более вариантов осуществления настоящего изобретения.
Фиг. 10 является схемой для описания условий второго моделирования согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 11A является набором графиков (a)-(e), иллюстрирующих взаимосвязь между первым параметром и временем операции парковки в одном или более вариантов осуществления настоящего изобретения.
Фиг. 11B является набором графиков (a)-(e), иллюстрирующих взаимосвязь между вторым параметром и временем операции парковки в одном или более вариантов осуществления настоящего изобретения.
Режим(ы) осуществления изобретения
[0009] Далее описываются один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, настоящее изобретение описывается посредством примерной иллюстрации примера, в котором оборудование управления парковкой согласно настоящему изобретению применяется к системе управления парковкой, оснащенной в транспортном средстве. Оборудование управления парковкой также может применяться к портативному терминальному устройству (такому оборудованию, как смартфон или персональное цифровое устройство (PDA)) допускающему обмен информацией с бортовыми устройствами. Способ управления парковкой согласно настоящему изобретению может использоваться в оборудовании управления парковкой, которое описывается ниже.
[0010] Фиг. 1 является блок-схемой системы 1000 управления парковкой, имеющей оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения. Система 1000 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения содержит камеры 1a-1d, устройство 2 обработки изображений, устройство 3 измерения дальности, вводное терминальное устройство 5, оборудование 100 управления парковкой, контроллер 70 транспортного средства, приводную систему 40, датчик 50 угла поворота при рулении и датчик 60 скорости транспортного средства. Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения управляет операцией перемещения (парковки) транспортного средства в место для парковки на основе рабочей команды, которая вводится из вводного терминального устройства 5.
[0011] Вводное терминальное устройство 5 представляет собой портативное терминальное устройство, которое может размещаться за пределами транспортного средства. Вводное терминальное устройство 5 принимает ввод рабочей команды для управления транспортным средством. Вводное терминальное устройство 5 включает в себя устройство связи и допускает обмен информацией с устройством 100 управления парковкой. Вводное терминальное устройство 5 передает рабочую команду, которая вводится снаружи транспортного средства, через сеть связи в оборудование 100 управления парковкой и вводит рабочую команду в оборудование 100 управления парковкой. Вводное терминальное устройство 5 обменивается данными с устройством 100 управления парковкой с использованием сигналов, включающих в себя уникальный идентификационный код.
Вводное терминальное устройство 5 включает в себя дисплей 51. Дисплей 51 представляет интерфейс ввода и различные информационные элементы. Когда дисплей 51 представляет собой дисплей с сенсорной панелью, он имеет функцию приема рабочей команды.
Вводное терминальное устройство 5 может представлять собой портативное устройство, такое как смартфон или персональное цифровое устройство (PDA), в котором устанавливаются приложения для приема ввода рабочей команды, используемой в способе управления парковкой согласно одному или более вариантов осуществления настоящего изобретения, и передачи рабочей команды в оборудование 100 управления парковкой.
[0012] Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения содержит устройство 10 управления, устройство 20 ввода и устройство 30 вывода. Эти компоненты оборудования 100 управления парковкой соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией.
Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает рабочую команду, передаваемую из внешнего вводного терминального устройства 5, и вводит рабочую команду в устройство 20 ввода. Устройство 20 ввода подтверждает принимаемую рабочую команду. Объект, который вводит рабочую команду во внешнее вводное терминальное устройство 5, может представлять собой человека (пользователя, пассажира, водителя или работника парковочной стоянки) либо также может представлять собой машину (устройство управления) на стороне парковочной стоянки. Устройство 20 ввода принимает рабочую команду, которую вводит пассажир в салоне транспортного средства. Устройство 20 ввода передает принимаемую рабочую команду в устройство 10 управления.
Устройство 30 вывода включает в себя дисплей 31. Устройство 30 вывода уведомляет водителя в отношении управляющей информации парковки. Дисплей 31 согласно одному или более вариантов осуществления настоящего изобретения представляет собой дисплей с сенсорной панелью, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, дисплей 31 служит в качестве устройства 20 ввода.
[0013] Устройство 10 управления оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения представляет собой конкретный компьютер, содержащий ROM 12, которое сохраняет программу управления парковкой, CPU в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 12, так что он служит в качестве оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения, и RAM 13, которое служит в качестве доступного устройства хранения данных.
[0014] Программа управления парковкой согласно одному или более вариантов осуществления настоящего изобретения представляет собой программу, которая выполняет процедуру управления, чтобы выполнять определение того, присутствует или нет пассажир в салоне транспортного средства, и управлять транспортным средством с возможностью парковаться в соответствии с результатом определения. Эта программа выполняется посредством устройства 10 управления оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения.
Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения представляет собой удаленную управляющую функцию приема рабочей команды снаружи и управления перемещением транспортного средства с возможностью парковаться на данном месте для парковки. Во время этой операции, пассажир может не присутствовать в салоне транспортного средства или также может присутствовать в салоне транспортного средства. Как описано выше, также можно вводить рабочую команду через устройство 20 ввода в салоне транспортного средства.
Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения может иметь тип с автоматическим управлением, в котором операция руления и операция нажатия педали акселератора/тормоза выполняются автоматически. Оборудование 100 управления парковкой также может иметь полуавтоматический тип, в котором операция руления выполняется автоматически, и водитель выполняет операцию нажатия педали акселератора/тормоза.
В программе управления парковкой согласно одному или более вариантов осуществления настоящего изобретения, пользователь может произвольно выбирать целевое место для парковки или оборудование 100 управления парковкой, либо сторона парковочной стоянки может автоматически задавать целевое место для парковки.
[0015] Устройство 10 управления оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения имеет функции выполнения процесса получения рабочих команд, процесса подтверждения присутствия пассажиров и процесса управления парковкой. Каждый из вышеуказанных процессов выполняется посредством взаимодействия программного обеспечения для реализации процесса и вышеописанных аппаратных средств.
[0016] При осуществлении способа управления парковкой для управления транспортным средством с возможностью парковаться на основе рабочей команды, полученной изнутри или извне транспортного средства, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения выполняет определение того, присутствует или нет пассажир в салоне транспортного средства, и управляет транспортным средством с возможностью парковаться с использованием способа управления в соответствии с результатом определения. Устройство 10 управления определяет присутствие или отсутствие пассажира в салоне транспортного средства, формирует путь для парковки в соответствии с присутствием или отсутствием пассажира, вычисляет управляющую информацию в соответствии с присутствием или отсутствием пассажира и управляет транспортным средством с возможностью парковаться на данном месте для парковки на основе вышеуказанного.
Транспортное средство может парковаться посредством способа, подходящего для каждого из запроса, когда пассажир присутствует в салоне транспортного средства, и запроса, когда пассажиры не присутствуют в салоне транспортного средства, поскольку транспортное средство управляется с возможностью парковаться в соответствии с результатом определения того, присутствует или нет пассажир в салоне транспортного средства. Например, когда пассажир присутствует в салоне транспортного средства, требуется, что величина изменения поведения транспортного средства должна быть небольшой, и некомфортное ощущение не вызывается у пассажиров. С другой стороны, когда пассажиры не присутствуют в салоне транспортного средства, необязательно принимать во внимание некомфортное ощущение, возникающее у пассажиров. В этом случае, плавная парковка с сокращенным временем операции парковки требуется. Устройство 100 управления парковкой выполняет процесс парковки с содержимым управления в соответствии с тем, присутствует или нет пассажир в салоне транспортного средства, и в силу этого может реагировать на соответствующие требования как в окружении, в котором пассажир присутствует, так и в окружении, в котором пассажир отсутствует. Пассажир, который выходит из транспортного средства, находится в состоянии выполнения операции парковки для транспортного средства или в состоянии ожидания завершения парковки. В любом состоянии, пассажир ограничивается по действию вследствие парковки, и предпочтительно, если такое время является коротким. В частности, в конкретных случаях, к примеру, когда климат является горячим/холодным, и когда погода представляет собой дождь/снег/сильный ветер, предпочтительно плавно завершать процесс парковки незамедлительно.
[0017] Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления процесса управления парковкой, выполняемого посредством системы 1000 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения. Триггер для начала процесса управления парковкой не ограничен конкретным образом, и процесс управления парковкой может быть инициирован посредством операции пускового переключателя оборудования 100 управления парковкой.
[0018] Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения имеет функцию автоматического перемещения транспортного средства V на место для парковки на основе рабочей команды, полученной извне транспортного средства.
[0019] На этапе 101, устройство 10 управления оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения получает изображения, захваченные посредством камер 1a-1d, присоединяемых к нескольким сегментам транспортного средства V. Хотя не ограничено конкретным образом, камера 1a располагается на части решетки радиатора транспортного средства V, камера 1d располагается около заднего бампера, и камеры 1b и 1c располагаются на нижних частях правого и левого боковых зеркал. Камеры 1a-1d могут представлять собой камеру, имеющую широкоугольную линзу с широким углом обзора. Камеры 1a-1d захватывают изображения граничных линий мест для парковки около транспортного средства V и объектов, существующих около мест для парковки. Камеры 1a-1d могут представлять собой CCD-камеры, камеры для съемки в инфракрасном диапазоне или другие соответствующие устройства формирования изображений.
[0020] На этапе 101, устройство 10 управления также получает сигналы измерения дальности из устройства 3 измерения дальности, которое может представлять собой множество модулей, присоединенных к нескольким сегментам транспортного средства V.
Устройство 3 измерения дальности может предоставляться в позиции, идентичной позиции любой из камер 1a-1d, или также может предоставляться в другой позиции. Устройство 3 измерения дальности может представлять собой радарное устройство, такое как радар миллиметрового диапазона, лазерный радар и ультразвуковой радар или сонар. Устройство 3 измерения дальности обнаруживает присутствие или отсутствие объектов, позиции объектов, размеры объектов и расстояния до объектов на основе принимаемого сигнала радарного устройства. Такие объекты включают в себя установленные объекты, пешеходов, другие транспортные средства и припаркованные транспортные средства около транспортного средства. Принимаемый сигнал используется для того, чтобы выполнять определение того, представляет собой место для парковки или нет незанятое место (паркуется или нет транспортное средство на месте для парковки). Помехи могут обнаруживаться с использованием стереотехнологии движения посредством камер 1a-1d.
[0021] На этапе 102, устройство 10 управления оборудования 100 управления парковкой управляет устройством 2 обработки изображений таким образом, чтобы формировать изображение вида сверху. На основе полученного множества захваченных изображений, устройство 2 обработки изображений формирует изображение вида сверху, в котором состояние окрестностей, включающее в себя транспортное средство V и место для парковки для парковки транспортного средства V, просматривается из виртуальной точки обзора над транспортным средством V. После этапа 101 может выполняться этап 103 без создания изображения вида сверху.
[0022] На этапе 103, устройство 10 управления обнаруживает места для парковки, на которые парковка является возможной. Устройство 10 управления обнаруживает сигнальные линии дорожной разметки на основе захваченных изображений из камер 1a-1d. Сигнальные линии дорожной разметки представляют собой граничные линии, которые задают рамки (зоны) мест для парковки. Устройство 10 управления выполняет обнаружение краев для захваченных изображений и обнаруживает места для парковки на основе яркостной разности (контрастности). После обнаружения мест для парковки, устройство 10 управления обнаруживает незанятые места для парковки в соответствии со следующим условием доступности парковки с использованием обнаруживаемых данных устройства 3 измерения дальности/устройства 2 обработки изображений. Устройство 10 управления обнаруживает доступные места для парковки из числа мест для парковки. Доступные места для парковки представляют собой места для парковки, которые являются незанятыми (т.е. другие транспортные средства не паркуются), и пути для выполнения парковки в которые могут извлекаться. Такое условие, что путь может извлекаться, означает то, что траектория пути может подготавливаться посредством рендеринга в координатах поверхности дороги без препятствий в виде помех (включающих в себя припаркованные транспортные средства). На практике, точный путь для парковки для управления транспортным средством извлекается после того, как целевое место для парковки задается.
[0023] На этапе 104, устройство 10 управления передает доступные места для парковки в дисплей 31 устройства 100 управления парковкой или во вводное терминальное устройство 5, которое управляется с возможностью отображать доступные места для парковки на дисплее 51. Доступные места для парковки могут накладываться на изображение вида сверху на основе захваченных изображений и отображаться на нем.
[0024] После этого, связь с вводным терминальным устройством 5 устанавливается, и процесс получения рабочих команд выполняется. На этапе 105, устройство 10 управления определяет то, вводится или нет целевое место для парковки. Устройство 10 управления определяет то, вводится или нет целевое место для парковки, на основе рабочей команды, которая непосредственно вводится в устройство 20 ввода.
Целевое место для парковки представляет собой место для парковки, на котором транспортное средство паркуется посредством автоматизированного вождения, и представляет целевую позицию при автоматизированном вождении. Целевое место для парковки вводится через вводное терминальное устройство 5. Например, когда дисплей 51 представляет собой дисплей с сенсорной панелью, пользователь может касаться участка требуемого места для парковки, чтобы за счет этого выбирать одно целевое место для парковки. Идентификационная информация выбранного целевого места для парковки передается в устройство 100 управления парковкой и вводится в устройство 10 управления. Когда, на этапе 105, рабочая команда, которая указывает одно место для парковки, вводится во вводное терминальное устройство 5, место для парковки задается в качестве целевого места для парковки. До тех пор, пока целевое место для парковки не будет введено, последовательность операций управления возвращается к этапу 104 и ожидает ввода рабочей команды. Рабочая команда включает в себя любое из активации оборудования 100 управления парковкой, выбора целевого места для парковки и команды выполнения для управления парковкой.
[0025] На этапе 106, процесс подтверждения присутствия выполняется для того, чтобы определять то, присутствует или нет пассажир в салоне транспортного средства. Устройство 10 управления выполняет определение того, присутствует или нет пассажир в салоне транспортного средства. Устройство 10 управления определяет присутствие или отсутствие пассажира на основе сигнала обнаружения из датчика сиденья, предоставленного на поверхности посадки сиденья. Помимо этого или альтернативно, устройство 10 управления может определять присутствие или отсутствие пассажира на основе того факта, что пользователь вводит любую из информации, указывающей то, что пассажир выходит из транспортного средства, информации относительно начала режима удаленного управления и информации активации устройства 100 управления парковкой. Помимо этого или альтернативно, присутствие или отсутствие пассажира может определяться на основе сигналов обнаружения из камеры, датчика присутствия человека и т.п., предоставленных в салоне транспортного средства.
[0026] Когда рабочая команда получается извне салона транспортного средства, устройство 10 управления может определять то, что пассажиры не присутствуют в салоне транспортного средства. В окружении, в котором рабочая команда вводится извне транспортного средства, имеется очень высокая вероятность того, что пассажиры не присутствуют в транспортном средстве. В силу этого устройство 10 управления оценивает то, что пассажиры не присутствуют в транспортном средстве, поскольку рабочая команда вводится извне транспортного средства. В зависимости от операции управления для автомобильной парковки, пассажир и оператор могут быть различными людьми, так что может выполняться определение того, применяется или нет процесс оценки к каждому процессу парковки. Когда рабочая команда получается извне салона транспортного средства, может выполняться определение того, что пассажиры не присутствуют в салоне транспортного средства, чтобы за счет этого определять присутствие или отсутствие пассажира без использования информации по обнаружению на стороне транспортного средства (к примеру, выходного сигнала из датчика сиденья).
[0027] Путь для парковки вычисляется в соответствии с результатом определения этапа 106. В одном или более вариантов осуществления настоящего изобретения, следующие схемы предлагаются при вычислении пути для парковки, подходящего для случая, в котором пассажиры не присутствуют в салоне транспортного средства.
(1) Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления вычисляет путь для парковки, имеющий большую кривизну и/или больший темп изменения кривизны, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. При движении по пути для парковки, имеющему большую кривизну и т.п., оценивается то, что поведение транспортного средства становится более выраженным. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, подтверждается то, что поведение транспортного средства становится более выраженным, и путь для парковки с небольшим расстоянием вычисляется. Путь для парковки может сокращаться, и процесс парковки в силу этого может быстро выполняться.
[0028] (2) Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления вычисляет путь для парковки, в котором время операции парковки, требуемое от начала парковки до завершения парковки, меньше по сравнению с тем, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, приоритет отдается быстрому выполнению процесса парковки. Чтобы сокращать время операции парковки, уменьшение длины пути и увеличение кривизны и/или темпа изменения кривизны подтверждается (поведение транспортного средства и его величина изменения становятся более выраженными). Время операции парковки может сокращаться, и процесс парковки в силу этого может быстро выполняться.
[0029] (3) Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления вычисляет путь для парковки, имеющий меньшее расстояние, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, приоритет отдается быстрому выполнению процесса парковки. Чтобы сокращать время операции парковки, увеличение кривизны и/или темпа изменения кривизны подтверждается (поведение транспортного средства и его величина изменения становятся более выраженными). Время операции парковки может сокращаться, и процесс парковки в силу этого может быстро выполняться.
[0030] (4) Устройство 10 управления вычисляет путь для парковки с использованием оценочной функции, в которой весовые параметры представляют собой краткость времени, требуемого для парковки, и плавность поведения транспортного средства. Плавность поведения транспортного средства может оцениваться посредством того факта, что изменение поведения транспортного средства является небольшим (величина изменения является небольшой). Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления задает весовой параметр краткости времени, требуемого для парковки, равным более высокому значению, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства, и задает весовой параметр плавности поведения транспортного средства равным меньшему значению, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Таким образом, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, приоритет отдается сокращению времени операции парковки за счет плавности поведения транспортного средства.
[0031] Устройство 10 управления оценивает полученный путь для парковки с использованием вышеуказанной оценочной функции. Когда пассажир присутствует в салоне транспортного средства, устройство 10 управления подтверждает максимальную кривизну и т.п., которая должна увеличиваться, и вычисляет меньший путь. Схема оценки (оценочная функция) для пути для парковки не ограничена конкретным образом, и может надлежащим образом применяться любая схема, известная на момент подачи этой заявки.
[0032] В одном или более вариантов осуществления настоящего изобретения, плавность поведения транспортного средства может получаться с использованием любого одного или более из рывка на основе продольной скорости, рывка на основе поперечной скорости и рывка с перемещением относительно вертикальной оси. Рывок, который означает производную по времени ускорения, представляет собой фактор, который затрагивает качество езды для пассажиров. Краткость времени, требуемого для парковки, в качестве пункта оценки может заменяться на краткость расстояния пути для парковки. Это обусловлено тем, что краткость расстояния пути для парковки способствует сокращению времени, требуемого для парковки.
[0033] Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, относительно высокий весовой параметр для краткости времени, требуемого для парковки, и относительно низкий весовой параметр для плавности поведения транспортного средства могут задаваться, чтобы за счет этого вычислять путь для парковки, в котором приоритет отдается сокращению времени операции парковки.
[0034] Снова ссылаясь на этап 106 по фиг. 2, когда выполняется определение того, что пассажир присутствует, процедура переходит к этапу 107, в то время как, когда выполняется определение того, что пассажиры не присутствуют, процедура переходит к этапу 121.
На этапе 107, первый параметр для вычисления путей для парковки, используемый, когда пассажир присутствует, считывается. Этот первый параметр используется для вычисления первого пути для парковки на следующем этапе 108. На этапе 121, второй параметр для вычисления путей для парковки, используемый, когда пассажиры не присутствуют, считывается. Этот второй параметр используется для вычисления второго пути для парковки на следующем этапе 122.
[0035] Фиг. 3 иллюстрирует пример параметров, используемых для вычисления пути для парковки. Как проиллюстрировано на фиг. 3, каждый параметр включает в себя первый параметр, используемый, когда пассажир присутствует в салоне транспортного средства, и второй параметр, используемый, когда пассажир отсутствует в салоне транспортного средства. Второй параметр считывается на этапе 121 после определения на этапе 106.
[0036] Параметры включают в себя любое одно или более из длины пути для парковки, максимальной кривизны пути для парковки, темпа изменения максимальной кривизны пути для парковки и верхней предельной скорости руления.
Относительно длины пути, второй параметр LR2 задается равным значению, меньшему первого параметра LR1. Когда пассажиры не присутствуют в салоне транспортного средства, второй параметр LR2 используется для того, чтобы вычислять относительно короткий путь для парковки. Относительно максимальной кривизны, второй параметр MR2 задается равным значению, большему первого параметра MR1. Когда пассажиры не присутствуют в салоне транспортного средства, второй параметр MR2 используется для того, чтобы вычислять путь для парковки, имеющий относительно большую кривую. Относительно темпа изменения максимальной кривизны, второй параметр CR2 задается равным значению, большему первого параметра CR1. Когда пассажиры не присутствуют в салоне транспортного средства, второй параметр CR2 используется для того, чтобы вычислять путь для парковки, имеющий относительно прерывистую кривизну (величина изменения является большой).
[0037] В одном или более вариантов осуществления настоящего изобретения, из числа параметров, включающих в себя максимальную кривизну, темп изменения максимальной кривизны и верхнюю предельную скорость руления, которые используются для вычисления целевого пути для транспортного средства, любой один или более параметров задаются следующим образом. Устройство 10 управления вычисляет целевой путь посредством задания второго параметра, используемого, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, равным более высокому значению, чем первый параметр, используемый, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства.
Устройство 10 управления увеличивает параметры, включающие в себя максимальную кривизну, темп изменения максимальной кривизны и верхнюю предельную скорость руления, чтобы за счет этого вычислять меньший путь для парковки. Сокращение пути для парковки может уменьшать время, требуемое для парковки.
[0038] Фиг. 4A иллюстрирует изменение во времени кривизны по мере того, как транспортное средство перемещается по пути для парковки. График MR1 в виде пунктирной линии представляет кривизну пути R1 для парковки, вычисленного с использованием первого параметра, и график MR2 в виде сплошной линии представляет кривизну пути R2 для парковки, вычисленного с использованием второго параметра. Как проиллюстрировано на чертеже, максимальная кривизна MX2, указываемая посредством графика MR2 в виде сплошной линии с использованием второго параметра, составляет значение, большее максимальной кривизны MX1, указываемой посредством графика MR1 в виде пунктирной линии с использованием первого параметра. Относительно темпа изменения максимальной кривизны, представленного посредством наклона от начала координат до максимального значения, темп CR2 изменения максимальной кривизны на графике MR2 в виде сплошной линии с использованием второго параметра составляет значение, большее темпа изменения максимальной кривизны, представленный посредством графика MR1 в виде пунктирной линии с использованием первого параметра.
[0039] Фиг. 4B иллюстрирует путь R1 для парковки, вычисленный с использованием первого параметра, и путь R2 для парковки, вычисленный с использованием второго параметра. Как проиллюстрировано на чертеже, путь R2 для парковки представляет собой путь, имеющий большую кривизну, чем кривизна пути R1 для парковки, но расстояние всего пути может сокращаться. Расстояние пути для парковки сокращается, и время, требуемое для парковки, в силу этого может также сокращаться.
[0040] Параметры включают в себя краткость времени, требуемого для парковки, в качестве первого взвешивания и плавность поведения транспортного средства в качестве второго взвешивания. Относительно краткости времени операции парковки в качестве первого взвешивания, второй параметр TVR2 задается равным значению, большему первого параметра TVR1. Когда пассажиры не присутствуют в салоне транспортного средства, второй параметр TVR2 используется для того, чтобы вычислять путь для парковки с меньшим временем операции парковки. Относительно плавности поведения транспортного средства в качестве второго взвешивания, второй параметр SR2 задается равным значению, меньшему первого параметра SR1. Когда пассажиры не присутствуют в салоне транспортного средства, второй параметр SR2 используется для того, чтобы вычислять путь для парковки, в котором нарушается плавность поведения транспортного средства (максимальная кривизна и темп изменения максимальной кривизны являются большими).
[0041] Устройство 10 управления вычисляет управляющую информацию в соответствии с результатом определения этапа 106.
В одном или более вариантов осуществления настоящего изобретения, следующие схемы предлагаются в качестве схем для вычисления управляющей информации, подходящей для случая, в котором пассажиры не присутствуют в салоне транспортного средства.
(1) Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления вычисляет управляющую информацию, чтобы делать более выраженным поведение транспортного средства, по сравнению с тем, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Устройство 10 управления управляет транспортным средством с возможностью перемещаться по пути для парковки в соответствии с управляющей информацией. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, подтверждается то, что поведение транспортного средства становится более выраженным, и приоритет отдается быстрому выполнению процесса парковки. В то время, когда поведение транспортного средства становится более выраженным (ускорение, замедление, угловая скорость рыскания, величина руления, скорость руления, поперечное ускорение и рывок становятся большими), транспортное средство может более быстро перемещаться, чтобы сокращать время операции парковки.
[0042] (2) Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления вычисляет управляющую информацию, чтобы сокращать время операции парковки, требуемое от начала парковки до завершения парковки, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, приоритет отдается быстрому выполнению процесса парковки. Время операции парковки сокращается при подтверждении увеличения значений, соответствующих поведению транспортного средства, таких как скорость, ускорение, замедление, угловая скорость рыскания, величина руления, скорость руления, поперечное ускорение и рывок.
[0043] (3) Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления увеличивает скорость транспортного средства, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, приоритет отдается быстрому выполнению процесса парковки. Скорость транспортного средства может задаваться высокой, чтобы за счет этого сокращать время операции парковки.
[0044] (4) Устройство 10 управления использует оценочную функцию, в которой весовые параметры представляют собой краткость времени, требуемого для парковки, и плавность поведения транспортного средства для процесса вычисления для управляющей информации. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления задает весовой параметр краткости времени, требуемого для парковки, равным более высокому значению, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства, и задает весовой параметр плавности поведения транспортного средства равным меньшему значению, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Это может сокращать время операции парковки, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства. Помимо этого, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства, поведение транспортного средства может сглаживаться в большей степени, за счет этого подавляя некомфортное ощущение, возникающее у пассажира.
[0045] (5) Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления задает точку завершения парковки, в которой транспортное средство управляется с возможностью останавливаться, равной позиции, в которой транспортное средство входит в контакт с бордюрным камнем. Когда шина транспортного средства входит в контакт с бордюрным камнем, контактная сила действует с возможностью перемещать транспортное средство назад и вперед. Это перемещение демонстрирует определенный рисунок в зависимости от скорости. Устройство 10 управления отслеживает перемещение транспортного средства и определяет то, что шина транспортного средства входит в контакт с бордюрным камнем при обнаружении этого рисунка. Это время обнаруживается в качестве времени, когда транспортное средство достигает точки завершения парковки. В силу этого можно точно определять то, что транспортное средство достигает точки завершения парковки, посредством обнаружения контакта шины транспортного средства с бордюрным камнем на основе изменения поведения транспортного средства.
Столкновение шины с бордюрным камнем встряхивает транспортное средство и вызывает некомфортное ощущение у пассажиров. Когда пассажир присутствует в салоне транспортного средства, устройство 10 управления предоставляет предварительно определенный допустимый запас от бордюрного камня, чтобы останавливать транспортное средство перед бордюрным камнем (на вышележащей стороне бордюрного камня). Это служит для того, чтобы предотвращать некомфортное ощущение, возникающее у пассажиров. С другой стороны, когда пассажиры не присутствуют в салоне транспортного средства, приоритет отдается сокращению времени операции парковки, а не качеству езды для пассажиров. Время операции парковки может сокращаться посредством задания точки завершения парковки, в которой транспортное средство управляется с возможностью останавливаться, равной позиции, в которой транспортное средство входит в контакт с бордюрным камнем.
[0046] Устройство 10 управления оценивает вычисленную управляющую информацию с использованием оценочной функции. Пункты оценки в оценочной функции представляют собой краткость времени, требуемого для парковки, и плавность поведения транспортного средства. Управляющая информация оценивается на основе суммы этих пунктов оценки. Взвешивание применяется к каждому пункту оценки, чтобы оптимизировать оценку. Схема оценки (оценочная функция) для управляющей информации, такой как целевая скорость транспортного средства, не ограничена конкретным образом, и может надлежащим образом применяться любая схема, известная на момент подачи этой заявки.
В одном или более вариантов осуществления настоящего изобретения, устройство 10 управления вычисляет плавность поведения транспортного средства с использованием любого одного или более из рывка на основе продольной скорости, рывка на основе поперечной скорости и рывка с перемещением относительно вертикальной оси. Рывок, который означает производную по времени от ускорения, представляет собой фактор, который затрагивает качество езды для пассажиров. Плавность поведения транспортного средства может позиционироваться в качестве значения, связанного с качеством езды для пассажиров. Когда пассажиры не присутствуют в салоне транспортного средства, допустимый уровень качества езды для пассажиров может задаваться низким, чтобы сокращать время операции парковки. Краткость времени, требуемого для парковки, в качестве пункта оценки может заменяться на большую величину скорости транспортного средства при парковке. Это обусловлено тем, что большая величина скорости транспортного средства при парковке способствует сокращению времени, требуемого для парковки.
[0047] Управляющая информация означает команду управления для скорости транспортного средства и т.п., полученную с использованием параметров, таких как ускорение, угловая скорость рыскания, величина руления, скорость руления и поперечное ускорение для управления поведением транспортного средства.
Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, относительно высокий весовой параметр для краткости времени, требуемого для парковки, и относительно низкий весовой параметр для плавности поведения транспортного средства могут задаваться, чтобы за счет этого вычислять управляющую информацию, в которой приоритет отдается сокращению времени операции парковки.
[0048] Для любого одного или более параметров из числа параметров, связанных с поведением транспортного средства, которые используются для вычисления целевой скорости транспортного средства и включают в себя верхнее предельное ускорение, верхнюю предельную угловую скорость рыскания, верхнее предельное поперечное ускорение, верхнюю предельную скорость руления, верхний предельный рывок при ускорении, верхнее предельное замедление и верхний предельный рывок при замедлении, устройство 10 управления задает второй параметр, который используется, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, равным более высокому значению, чем первое значение, которое используется, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства, и вычисляет целевую скорость при парковке.
Плавность поведения транспортного средства получается с использованием любого одного или более из рывка на основе продольной скорости, рывка на основе поперечной скорости и рывка с перемещением относительно вертикальной оси.
Для параметров, связанных с поведением транспортного средства, второй параметр, когда пассажиры не присутствуют, может задаваться выше первого параметра, когда пассажир присутствует, чтобы за счет этого сокращать время, требуемое для парковки, при подтверждении поведения транспортного средства становиться более выраженным.
[0049] Снова ссылаясь на фиг. 2, в дальнейшем описывается процедура обработки. Когда выполняется определение того, что пассажир присутствует в салоне транспортного средства, устройство 10 управления считывает первый параметр для вычисления управляющей информации на этапе 109. На этапе 110, устройство 10 управления вычисляет первую управляющую информацию с использованием первого параметра. Первая управляющая информация представляет собой информацию для управления поведением транспортного средства при перемещении транспортного средства в целевое место для парковки.
Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления считывает второй параметр для вычисления управляющей информации на этапе 123. На этапе 124, устройство 10 управления вычисляет вторую управляющую информацию с использованием второго параметра. Вторая управляющая информация представляет собой информацию для управления поведением транспортного средства при перемещении транспортного средства в целевое место для парковки.
[0050] В способе управления парковкой согласно одному или более вариантов осуществления настоящего изобретения, могут выполняться как вышеописанный процесс вычисления для пути для парковки с использованием первого параметра, так и процесс вычисления для управляющей информации с использованием первого параметра, либо также может выполняться только один из процессов вычисления. Когда на этапе 106 выполняется определение того, что пассажир присутствует в салоне транспортного средства, первый параметр для вычисления путей для парковки считывается на этапе 107, чтобы вычислять первый путь для парковки, и затем процедура может переходить к этапу 110, на котором управляющая информация вычисляется с использованием параметра по умолчанию, чтобы перемещать транспортное средство по первому пути для парковки. Когда на этапе 106 выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, второй параметр для вычисления путей для парковки считывается на этапе 121, чтобы вычислять второй путь для парковки, и затем процедура может переходить к этапу 124, на котором управляющая информация вычисляется с использованием параметра по умолчанию, чтобы перемещать транспортное средство по второму пути для парковки. Работа и преимущество настоящего изобретения могут получаться просто посредством сокращения второго пути для парковки.
[0051] Когда на этапе 106 выполняется определение того, что пассажир присутствует в салоне транспортного средства, первый путь для парковки может вычисляться с использованием параметра по умолчанию без считывания первого параметра для вычисления путей для парковки на этапе 107, и затем процедура может переходить к этапу 109, чтобы считывать первый параметр для вычисления управляющей информации. На этапе 110, управляющая информация может вычисляться с использованием первого параметра, чтобы перемещать транспортное средство по первому пути для парковки. Когда на этапе 106 выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, второй путь для парковки может вычисляться с использованием параметра по умолчанию без считывания второго параметра для вычисления путей для парковки на этапе 121, и затем процедура может переходить к этапу 124, на котором управляющая информация вычисляется с использованием второго параметра, чтобы перемещать транспортное средство по второму пути для парковки. Работа и преимущество настоящего изобретения могут получаться просто посредством придания поведению транспортного средства выраженного характера.
[0052] Фиг. 5 иллюстрирует пример параметров, используемых для вычисления управляющей информации при парковке. Как проиллюстрировано на фиг. 5, каждый параметр включает в себя первый параметр, используемый, когда пассажир присутствует в салоне транспортного средства, и второй параметр, используемый, когда пассажир отсутствует в салоне транспортного средства. Второй параметр считывается на этапе 123 после определения на этапе 106.
[0053] Параметры включают в себя значения индекса, которые обуславливают поведение транспортного средства. Значения индекса включают в себя любое одно или более из скорости, ускорения, замедления, угловой скорости рыскания, поперечного ускорения, величины руления, скорости руления, поперечного ускорения и рывка.
Относительно верхнего предельного ускорения, второй параметр AR2 задается равным значению, большему первого параметра AR1. Когда пассажиры не присутствуют в салоне транспортного средства, второй параметр AR2 используется для того, чтобы вычислять управляющую информацию, при использовании которой поведение транспортного средства становится относительно более выраженным. Относительно верхнего предельного замедления, второй параметр DR2 задается равным значению, большему первого параметра DR1. Когда пассажиры не присутствуют в салоне транспортного средства, второй параметр DR2 используется для того, чтобы вычислять управляющую информацию, при использовании которой поведение транспортного средства становится относительно более выраженным. То же применимо к верхней предельной угловой скорости (YR1, YR2) рыскания, верхнему предельному поперечному ускорению (HAR1, HAR2), верхней предельной скорости (SRR1, SRR2) руления и верхнему предельному рывку (STJR1, STJR2), как проиллюстрировано на чертеже. Когда пассажиры не присутствуют в салоне транспортного средства, второй параметр (YR2, HAR2, SRR2, STJR2) используется для того, чтобы вычислять управляющую информацию, при использовании которой поведение транспортного средства становится относительно более выраженным. Парковка может завершаться за короткое время, поскольку более выраженное поведение транспортного средства подтверждается.
[0054] Параметры включают в себя время замедления от момента, когда замедление транспортного средства начинается, до момента, когда транспортное средство останавливается. Это время замедления используется для вычисления целевой скорости при управлении транспортным средством с возможностью останавливаться. Для параметров, связанных со временем замедления от момента, когда замедление транспортного средства начинается, до момента, когда транспортное средство останавливается, устройство 10 управления задает второе время STRR2 замедления, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, равным меньшему значению, чем первое время STRR1 замедления, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства, и вычисляет целевую скорость при парковке. Устройство 10 управления управляет транспортным средством на основе целевой скорости. Когда пассажир отсутствует в транспортном средстве, время замедления от момента, когда замедление транспортного средства начинается, до момента, когда транспортное средство останавливается, задается меньше с тем, чтобы получать целевую скорость, и в силу этого время операции парковки может сокращаться. Время замедления также может выражаться как расстояние замедления.
[0055] Фиг. 6 иллюстрирует изменение во времени целевой скорости транспортного средства. График SDR1 в виде пунктирной линии представляет изменение во времени целевой скорости (управляющей информации), вычисленной с использованием первого параметра, в то время как график SDR2 в виде сплошной линии представляет изменение во времени целевой скорости (управляющей информации), вычисленной с использованием второго параметра. Сравнение проводится в течение времени от начала замедления до завершения парковки (времени до тех пор, пока целевая скорость не станет нулевой). Как проиллюстрировано на чертеже, время до завершения парковки, указываемое посредством графика SDR2 в виде сплошной линии с использованием второго параметра, составляет STRR2, и время до завершения парковки, указываемое посредством графика SDR1 в виде пунктирной линии с использованием первого параметра, составляет STRR1.
Относительно максимального замедления, представленного посредством наклона в начале замедления, максимальное замедление STJR2 на графике SDR2 в виде сплошной линии с использованием второго параметра составляет значение, большее максимального замедления STJR1, указываемого посредством графика SDR1 в виде пунктирной линии с использованием первого параметра. Относительно поведения транспортного средства, можно подтверждать то, что поведение (замедление) транспортного средства становится более выраженным посредством использования второго параметра, большего первого параметра. Это может сокращать время от замедления до завершения парковки.
[0056] Параметры включают в себя допустимый запас по позиции остановки до точки завершения парковки для транспортного средства. Когда выполняется определение того, что пассажир присутствует в салоне транспортного средства, устройство 10 управления управляет транспортным средством с возможностью останавливаться на вышележащей стороне точки завершения парковки посредством первого допустимого запаса MR1 по позиции остановки. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления управляет транспортным средством с возможностью останавливаться на вышележащей стороне или нижележащей стороне точки завершения парковки посредством второго допустимого запаса MR2 по позиции остановки. Второй допустимый запас MR2 по позиции остановки составляет значение, меньшее первого допустимого запаса MR1 по позиции остановки. Точка завершения парковки, например, представляет собой позицию бордюрного камня. Когда допустимый запас по позиции остановки задается равным небольшому значению на вышележащей стороне точки завершения парковки, вероятность того, что транспортное средство входит в контакт с бордюрным камнем, является высокой. Когда допустимый запас по позиции остановки задается равным нулю, транспортное средство останавливается в точке завершения парковки, т.е. в позиции, в которой транспортное средство входит в контакт с бордюрным камнем. Когда допустимый запас по позиции остановки задается на нижележащей стороне точки завершения парковки, транспортное средство входит в контакт с бордюрным камнем. Другими словами, имеется очень высокая вероятность вызывания некомфортного ощущения у пассажиров. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, время замедления до точки завершения парковки задается равным короткому времени, или транспортное средство управляется с возможностью останавливаться, когда оно входит в контакт с бордюрным камнем, при одновременном подтверждении вероятности того, что транспортного средства может входить в контакт с бордюрным камнем.
Фиг. 7 иллюстрирует взаимосвязь между расстоянием до точки завершения парковки и целевой скоростью транспортного средства. Позиция нулевого расстояния представляет собой точку завершения парковки, которая представляет собой позицию бордюрного камня CR. Первый допустимый запас MR1 по позиции остановки задается на вышележащей стороне (+x) относительно направления DR движения транспортного средства. В этом случае, второй допустимый запас MR2 по позиции остановки меньше первого допустимого запаса MR1 по позиции остановки. Второй допустимый запас MR2 по позиции остановки может задаваться на нижележащей стороне (-x) относительно направления DR движения транспортного средства.
Таким образом, посредством управления транспортным средством с возможностью останавливаться в точке около вышележащей стороны точки завершения парковки, такой как бордюрный камень, или в точке на нижележащей стороне точки завершения парковки, время операции парковки может сокращаться при одновременном подтверждении входа транспортного средства в контакт с бордюрным камнем.
[0057] Параметры включают в себя краткость времени, требуемого для парковки, в качестве первой взвешенной величины и плавность поведения транспортного средства в качестве второй взвешенной величины. Относительно краткости времени операции парковки в качестве первой взвешенной величины, второй параметр TVR2 задается равным значению, большему первого параметра TVR1. Когда пассажиры не присутствуют в салоне транспортного средства, второй параметр TVR2 используется для того, чтобы вычислять управляющую информацию, при использовании которой достигается меньшее время операции парковки. Относительно плавности поведения транспортного средства в качестве второй взвешенной величины, второй параметр SR2 задается равным значению, меньшему первого параметра SR1. Когда пассажиры не присутствуют в салоне транспортного средства, второй параметр SR2 используется для того, чтобы вычислять управляющую информацию, при использовании которой нарушается плавность поведения транспортного средства.
[0058] Снова ссылаясь на фиг. 2, когда пассажир присутствует в салоне транспортного средства, на этапе 110, устройство 10 управления использует полученный первый параметр для того, чтобы вычислять первую управляющую информацию при управлении транспортным средством с возможностью перемещаться в целевое место для парковки. С другой стороны, когда пассажиры не присутствуют в пространстве, на этапе 124, устройство 10 управления использует полученный второй параметр для того, чтобы вычислять вторую управляющую информацию при управлении транспортным средством с возможностью перемещаться в целевое место для парковки.
[0059] Когда инструкция выполнения для процесса управления парковкой вводится на этапе 111, процедура переходит к этапу 111, на котором оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения выполняет процесс управления парковкой.
Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения управляет работой приводной системы 40 через контроллер 30 транспортного средства таким образом, что транспортное средство V1 перемещается по пути для парковки в соответствии с управляющей информацией.
[0060] Оборудование 100 управления парковкой вычисляет сигналы команд управления в приводную систему 40 транспортного средства V1, к примеру, в EPS-электромотор, при возврате выходного значения датчика 50 угла поворота при рулении оборудования рулевого управления таким образом, что траектория движения транспортного средства V1 совпадает с вычисленным путем для парковки, и передает сигналы команд управления в приводную систему 40 или в контроллер 70 транспортного средства, который управляет приводной системой 40.
[0061] Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения включает в себя модуль управления парковкой. Модуль управления парковкой получает информацию диапазона переключения передач из модуля AT/CVT-управления, информацию скорости вращения колес из модуля ABS-управления, информацию угла поворота при рулении из модуля управления углом поворота при рулении, информацию частоты вращения двигателя из ECM и другую необходимую информацию. На ее основе, модуль управления парковкой вычисляет и выводит информацию с инструкциями по автоматизированному рулению в модуль EPS-управления, информацию с инструкциями, такую как предупреждение, в модуль управления измерительными приборами и т.д. Устройство 10 управления получает информационные элементы, которые получаются посредством датчика 50 угла поворота при рулении оборудования рулевого управления транспортного средства и датчика 60 скорости транспортного средства и других датчиков транспортного средства через контроллер 70 транспортного средства.
[0062] Приводная система 40 согласно одному или более вариантов осуществления настоящего изобретения управляет транспортным средством V1 с возможностью перемещаться (двигаться) из текущей позиции на целевое место для парковки посредством вождения на основе сигналов команд управления, полученных из оборудования 100 управления парковкой. Оборудование рулевого управления согласно одному или более вариантов осуществления настоящего изобретения представляет собой приводной механизм, который перемещает транспортное средство V1 в направлениях вправо и влево. EPS-электромотор, включенный в приводную систему 40, приводит в действие механизм усилителя рулевого управления оборудования рулевого управления на основе сигналов команд управления, полученных из оборудования 100 управления парковкой, чтобы управлять величиной руления, и управляет работой при перемещении транспортного средства V1 в целевое место для парковки. Содержимое управления и схема операции для парковки транспортного средства V1 не ограничены конкретным образом, и может надлежащим образом применяться любая схема, известная на момент подачи этой заявки.
[0063] Когда оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения управляет транспортным средством V1 с возможностью перемещаться на целевое место для парковки по пути, вычисленному на основе позиции P4 транспортного средства V1 и позиции целевого места для парковки, акселератор и тормоз автоматически управляются на основе указанной управляющей скорости транспортного средства (заданной скорости транспортного средства), и работа оборудования рулевого управления также автоматически управляется в соответствии со скоростью транспортного средства. Таким образом, во время управления парковкой согласно одному или более вариантов осуществления настоящего изобретения, операция руления и операция нажатия педали акселератора/тормоза автоматически выполняются. Кроме того, оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения также является применимым к парковке вручную, при которой водитель выполняет операцию с акселератором, тормозом и механизмом рулевого управления.
[0064] Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения допускает процесс парковки на основе удаленного управления, в котором транспортное средство V1 без водителя паркуется посредством передачи команды задания для целевого места для парковки, команды начала процесса парковки, команда приостановки/отмены процесса парковки и т.д. в транспортное средство V1 извне.
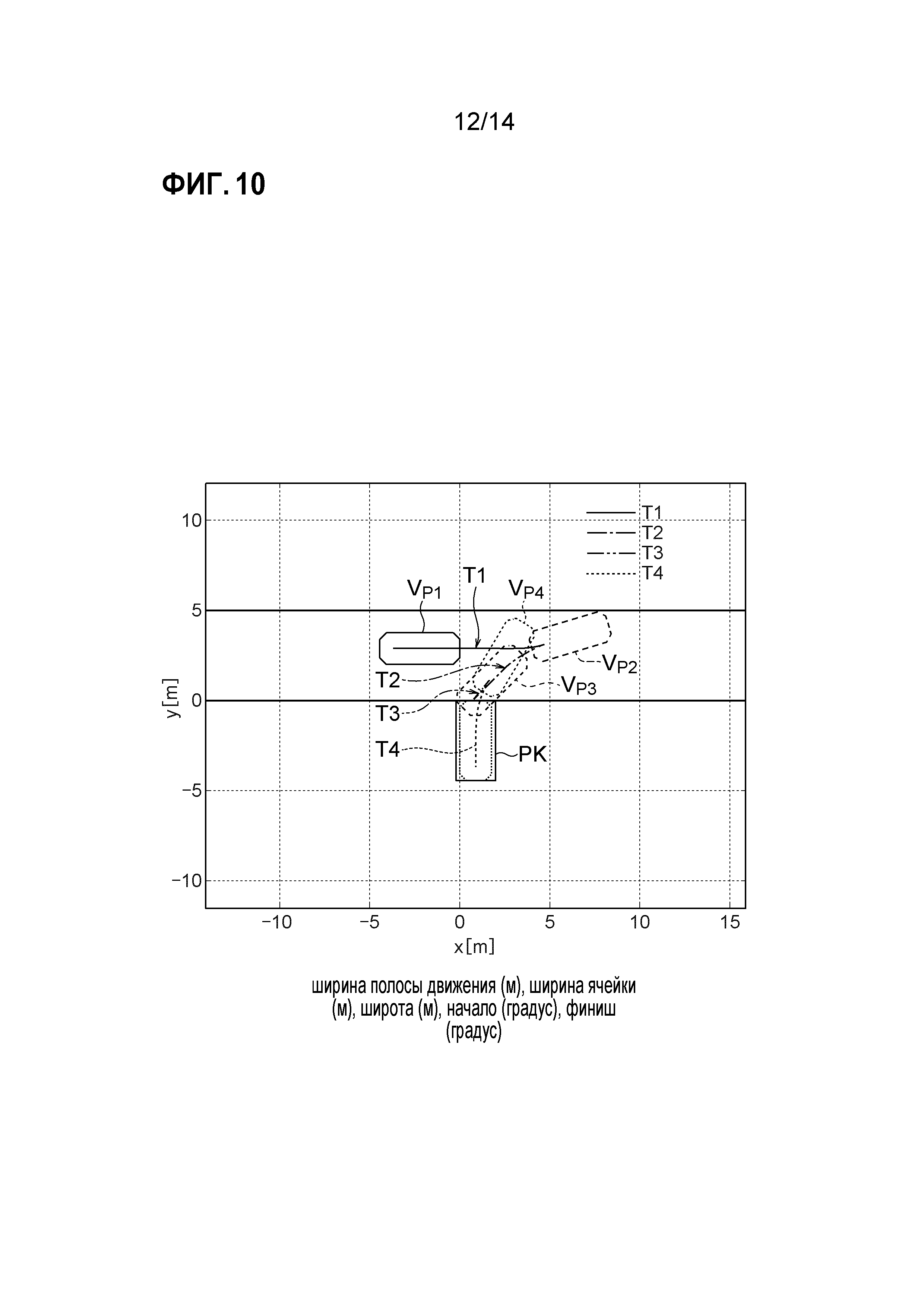
[0065] Моделирование проведено, чтобы подтверждать преимущества одного или более вариантов осуществления настоящего изобретения. При этом моделировании, профили поведения (к примеру, скорости) транспортного средства V1 получены с использованием различных параметров в соответствии с результатом определения того, присутствует или нет пассажир в салоне транспортного средства. Фиг. 8, фиг. 9A и фиг. 9B иллюстрируют профили поведения (к примеру, скорости) транспортного средства V1 на пути для парковки с одним поворотом для парковки, и фиг. 10, фиг. 11A и фиг. 11B иллюстрируют профили поведения (к примеру, скорости) транспортного средства V1 на пути для парковки с несколькими поворотами для парковки.
[0066] Фиг. 8 является схемой для описания условий первого моделирования. Транспортное средство в качестве модели трогается с места из первой позиции VP1 и перемещается по первому пути T1 во вторую позицию VP2. Транспортное средство затем возвращается во вторую позицию VP2 и перемещается по второму пути T2 в третью позицию VP3. Третья позиция VP3 представляет собой целевую позицию PK, в которой транспортное средство V1 останавливается. Моделирование проведено при идентичных условиях, когда пассажир присутствует в салоне транспортного средства, и когда пассажиры не присутствуют в салоне транспортного средства. При моделировании, условия задаются в качестве ширины полосы движения: ширина полосы движения (м), ширины места для парковки: ширина ячейки (м), ширины транспортного средства: широта (м), угла начала парковки: начало (градус), и угла завершения парковки: финиш (градус). Эти условия определяют приемлемые пути и операции. Оптимальный путь (путь, по которому парковка может выполняться за минимальное время, или путь, по которому поведение подавляется) формируется из числа приемлемых путей и операций, и моделирование выполняется.
[0067] Фиг. 9A иллюстрирует изменения во времени целевой скорости (a), кривизны пути (b), оставшегося расстояния (c), ускорения (d) и рывка с перемещением относительно вертикальной оси (e), когда пассажиры присутствуют в салоне транспортного средства. Фиг. 9B иллюстрирует изменения во времени целевой скорости (a), кривизны пути (b), оставшегося расстояния (c), ускорения (d) и рывка с перемещением относительно вертикальной оси (e), когда пассажиры не присутствуют в салоне транспортного средства. На фиг. 9A и фиг. 9B, Traj1 на чертеже представляет профиль для первого пути T1, и Traj2 представляет профиль для второго пути T2.
[0068] Сравнение должно проводиться между профилями по фиг. 9A и фиг. 9B.
(1) Максимальное значение 9B1 целевой скорости профиля, когда пассажиры не присутствуют, как проиллюстрировано на фиг. 9B(a), управляется с возможностью быть выше максимального значения 9A1 целевой скорости профиля, когда пассажир присутствует, как проиллюстрировано на фиг. 9A(a). Когда пассажиры не присутствуют, приоритет отдается быстрому выполнению парковки, а не плавному перемещению транспортного средства, и в силу этого время операции парковки может сокращаться.
(2) Темп 9B2 изменения кривизны профиля, когда пассажиры не присутствуют, как проиллюстрировано на фиг. 9B(b), управляется до более высокого значения, чем темп 9A2 изменения кривизны профиля, когда пассажир присутствует, как проиллюстрировано на фиг. 9A(b). Когда пассажиры не присутствуют, приоритет отдается быстрому выполнению парковки, а не плавному перемещению транспортного средства, и в силу этого время операции парковки может сокращаться.
(3) Время 9B3 до тех пор, пока оставшееся расстояние профиля, когда пассажиры не присутствуют, не станет нулевым (завершение парковки), как проиллюстрировано на фиг. 9B(c), управляется с возможностью быть меньше времени 9A3 до тех пор, пока оставшееся расстояние профиля, когда пассажир присутствует, не станет нулевым (завершение парковки), как проиллюстрировано на фиг. 9A(c). Когда пассажиры не присутствуют, приоритет отдается быстрому выполнению парковки, а не плавному перемещению транспортного средства, и в силу этого время операции парковки может сокращаться.
(4) Ширина 9B4 варьирования ускорения профиля, когда пассажиры не присутствуют, как проиллюстрировано на фиг. 9B(d), управляется с возможностью превышать ширину 9A4 варьирования ускорения профиля, когда пассажир присутствует, как проиллюстрировано на фиг. 9A(d). Когда пассажиры не присутствуют, приоритет отдается быстрому выполнению парковки, а не плавному перемещению транспортного средства, и в силу этого время операции парковки может сокращаться.
(5) Максимальное значение/ширина 9B5 варьирования рывка с перемещением относительно вертикальной оси профиля, когда пассажиры не присутствуют, как проиллюстрировано на фиг. 9B(e), управляется с возможностью превышать максимальное значение/ширину 9A5 варьирования рывка с перемещением относительно вертикальной оси профиля, когда пассажир присутствует, как проиллюстрировано на фиг. 9A(e). Когда пассажиры не присутствуют, приоритет отдается быстрому выполнению парковки, а не плавному перемещению транспортного средства, и в силу этого время операции парковки может сокращаться.
[0069] Фиг. 10 является схемой для описания условий второго моделирования. Второе моделирование отличается от первого моделирования по числу поворотов для парковки.
Как проиллюстрировано на фиг. 10, транспортное средство в качестве модели трогается с места из первой позиции VP1 и перемещается по первому пути T1 во вторую позицию VP2. Транспортное средство затем возвращается во вторую позицию VP2 и перемещается обратно по второму пути T2 в третью позицию VP3. Транспортное средство затем перемещается вперед из третьей позиции VP3 по третьему пути T3 и перемещается в четвертую позицию VP4.
Четвертая позиция VP4 представляет собой целевую позицию PK, в которой транспортное средство V1 останавливается. Моделирование проведено при идентичных условиях, когда пассажир присутствует в транспортном средстве, и когда пассажиры не присутствуют в транспортном средстве. При моделировании, условия задаются в качестве ширины полосы движения: ширина полосы движения (м), ширины места для парковки: ширина ячейки (м), ширины транспортного средства: широта (м), угла начала парковки: начало (градус), и угла завершения парковки: финиш (градус). Эти условия определяют приемлемые пути и операции. Оптимальный путь (путь, по которому парковка может выполняться за минимальное время, или путь, по которому поведение подавляется) формируется из числа приемлемых путей и операций, и моделирование выполняется.
[0070] Фиг. 11A иллюстрирует изменения во времени целевой скорости (a), кривизны пути (b), оставшегося расстояния (c), ускорения (d) и рывка с перемещением относительно вертикальной оси (e), когда пассажиры присутствуют в салоне транспортного средства. Фиг. 11B иллюстрирует изменения во времени целевой скорости (a), кривизны пути (b), оставшегося расстояния (c), ускорения (d) и рывка с перемещением относительно вертикальной оси (e), когда пассажиры не присутствуют в салоне транспортного средства. На фиг. 11A и на фиг. 11B, Traj1 на чертеже представляет профиль для первого пути T1, Traj2 представляет профиль для второго пути T2, Traj3 на чертеже представляет профиль для третьего пути T3, и Traj4 представляет профиль для четвертого пути T4.
[0071] Сравнение должно проводиться между профилями по фиг. 11A и фиг. 11B.
(1) Максимальное значение 11B1 целевой скорости профиля, когда пассажиры не присутствуют, как проиллюстрировано на фиг. 11B(a), управляется с возможностью быть выше максимального значения 11A1 целевой скорости профиля, когда пассажир присутствует, как проиллюстрировано на фиг. 11A(a). Когда пассажиры не присутствуют, приоритет отдается быстрому выполнению парковки, а не плавному перемещению транспортного средства, и в силу этого время операции парковки может сокращаться.
(2) Темп 11B2 изменения кривизны профиля, когда пассажиры не присутствуют, как проиллюстрировано на фиг. 11B(b), управляется до более высокого значения, чем темп 11A2 изменения кривизны профиля, когда пассажир присутствует, как проиллюстрировано на фиг. 11A(b). Когда пассажиры не присутствуют, приоритет отдается быстрому выполнению парковки, а не плавному перемещению транспортного средства, и в силу этого время операции парковки может сокращаться.
(3) Время 11B3 до тех пор, пока оставшееся расстояние профиля, когда пассажиры не присутствуют, не станет нулевым (завершение парковки), как проиллюстрировано на фиг. 11B(c), управляется с возможностью быть меньше времени 11A3 до тех пор, пока оставшееся расстояние профиля, когда пассажир присутствует, не станет нулевым (завершение парковки), как проиллюстрировано на фиг. 11A(c). Когда пассажиры не присутствуют, приоритет отдается быстрому выполнению парковки, а не плавному перемещению транспортного средства, и в силу этого время операции парковки может сокращаться.
(4) Ширина 11B4 варьирования ускорения профиля, когда пассажиры не присутствуют, как проиллюстрировано на фиг. 11B(d), управляется с возможностью превышать ширину 11A4 варьирования ускорения профиля, когда пассажир присутствует, как проиллюстрировано на фиг. 11A(d). Когда пассажиры не присутствуют, приоритет отдается быстрому выполнению парковки, а не плавному перемещению транспортного средства, и в силу этого время операции парковки может сокращаться.
(5) Максимальное значение/ширина 11B5 варьирования рывка с перемещением относительно вертикальной оси профиля, когда пассажиры не присутствуют, как проиллюстрировано на фиг. 11B(e), управляется с возможностью превышать максимальное значение/ширину 11A5 варьирования рывка с перемещением относительно вертикальной оси профиля, когда пассажир присутствует, как проиллюстрировано на фиг. 11A(e). Когда пассажиры не присутствуют, приоритет отдается быстрому выполнению парковки, а не плавному перемещению транспортного средства, и в силу этого время операции парковки может сокращаться.
[0072] Способ управления парковкой согласно одному или более вариантов осуществления настоящего изобретения используется в оборудовании управления парковкой, как указано выше, и в силу этого имеет следующие преимущества. Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения сконфигурировано и работает так, как указано выше, и в силу этого имеет следующие преимущества.
[0073] (1) Согласно способу управления парковкой в одном или более вариантов осуществления настоящего изобретения, транспортное средство может управляться с содержимым в соответствии с результатом определения того, присутствует или нет пассажир в салоне транспортного средства. Это обеспечивает возможность транспортному средству парковаться посредством способа, адаптированного как к запросу на управление парковкой, когда пассажир присутствует в салоне транспортного средства, так и к запросу на управление парковкой, когда пассажиры не присутствуют в салоне транспортного средства. Согласно способу управления парковкой в одном или более вариантов осуществления настоящего изобретения, когда пассажир присутствует в салоне транспортного средства, выполняется управление парковкой, при котором величина изменения поведения транспортного средства является небольшой, и некомфортное с меньшей вероятностью должно вызываться к пассажирах, и когда пассажиры не присутствуют в салоне транспортного средства, плавное управление парковкой выполняется с сокращенным временем операции парковки. Согласно способу управления парковкой в одном или более вариантов осуществления настоящего изобретения, посредством вычисления пути для парковки в соответствии с определением присутствия или отсутствием пассажира или посредством вычисления управляющей информации в соответствии с определением присутствия или отсутствием пассажира, можно выполнять процесс парковки, который удовлетворяет как запросу, когда пассажир присутствует в салоне транспортного средства, так и запросу, когда пассажиры не присутствуют в салоне транспортного средства.
[0074] (2) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления управляет транспортным средством таким образом, что время операции парковки сокращается, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Через эту операцию, когда пассажиры не присутствуют в салоне транспортного средства, плавное управление парковкой выполняется с сокращенным временем операции парковки.
Время операции парковки в способе согласно одному или более вариантов осуществления настоящего изобретения отличается в зависимости от того, присутствует или нет пассажир в салоне транспортного средства при движении по идентичному пути. Время операции парковки, как упомянуто в данном документе, может отличаться в зависимости от того, присутствует или нет пассажир в салоне транспортного средства, когда проезжаемое расстояние для парковки является идентичным. Кроме того, транспортное средство может парковаться посредством способа, подходящего для каждого из запроса, когда пассажир присутствует в салоне транспортного средства, и запроса, когда пассажиры не присутствуют в салоне транспортного средства, поскольку транспортное средство управляется с возможностью парковаться в соответствии с результатом определения того, присутствует или нет пассажир в салоне транспортного средства. Когда пассажиры не присутствуют в салоне транспортного средства, необязательно принимать во внимание некомфортное ощущение, возникающее у пассажиров. В этом случае, плавная парковка с сокращенным временем операции парковки требуется. Устройство 100 управления парковкой выполняет процесс парковки с содержимым управления в соответствии с тем, присутствует или нет пассажир в салоне транспортного средства, и в силу этого может реагировать на соответствующие требования как в окружении, в котором пассажир присутствует, так и в окружении, в котором пассажир отсутствует. Пассажир, который выходит из транспортного средства, находится в состоянии выполнения операции парковки для транспортного средства или в состоянии ожидания завершения парковки. В любом состоянии, пассажир ограничивается по действию вследствие парковки, и предпочтительно, если такое время (время для ожидания пассажира) является коротким. В частности, в конкретных случаях, к примеру, когда климат является горячим/холодным, и когда погода представляет собой дождь/снег/сильный ветер, предпочтительно плавно завершать процесс парковки незамедлительно.
[0075] (3) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления вычисляет путь для парковки, имеющий большую кривизну и/или больший темп изменения кривизны, при котором оценивается то, что поведение транспортного средства становится более выраженным, по сравнению с тем, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, приоритет отдается быстрому выполнению процесса парковки, а не приданию поведению транспортного средства выраженного характера. Подтверждается то, что поведение транспортного средства становится более выраженным, и путь для парковки, имеющий меньшее расстояние, в силу этого может вычисляться. Путь для парковки может сокращаться, и процесс парковки в силу этого может быстро выполняться.
Когда пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления вычисляет управляющую информацию, при использовании которой поведение транспортного средства становится более выраженным, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, подтверждается то, что поведение транспортного средства становится более выраженным, и приоритет отдается быстрому выполнению процесса парковки. Поведение транспортного средства становится более выраженным (скорость, ускорение транспортного средства, замедление, угловая скорость рыскания, поперечное ускорение, рывок, величина руления и скорость руления являются большими), но вместо этого, транспортное средство может перемещаться быстрее по пути для парковки. Время операции парковки, требуемое для парковки, может сокращаться, и процесс парковки в силу этого может быстро выполняться.
[0076] (4) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, вычисляется путь для парковки, в котором сокращается время операции парковки, требуемое от начала парковки до завершения парковки, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, приоритет отдается быстрому выполнению процесса парковки. Чтобы сокращать время операции парковки, уменьшение длины пути и увеличение кривизны и/или темпа изменения кривизны подтверждается (поведение транспортного средства и его величина изменения становятся более выраженными). Вместо этого, время операции парковки сокращается, и процесс парковки в силу этого может быстро выполняться.
Кроме того, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления отдает приоритет быстрому выполнению процесса парковки, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Чтобы сокращать время операции парковки, подтверждается то, что поведение транспортного средства становится более выраженным, к примеру, скорость, ускорение, замедление, угловая скорость рыскания, величина руления, скорость руления, поперечное ускорение и рывок. Время операции парковки может сокращаться, и процесс парковки в силу этого может быстро выполняться.
[0077] (5) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления вычисляет путь для парковки, имеющий меньшее расстояние, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, приоритет отдается быстрому выполнению процесса парковки. Вместо подтверждения увеличения кривизны и/или темпа изменения кривизны, может сокращаться расстояние для парковки. Как результат, время операции парковки может сокращаться.
[0078] (6) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, устройство 10 управления увеличивает скорость транспортного средства для парковки, чем тогда, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, приоритет отдается быстрому выполнению процесса парковки. Посредством задания скорости транспортного средства высокой, время движения по пути для парковки может сокращаться. Как результат, процесс парковки может быстро выполняться.
[0079] (7) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, второй параметр, используемый в процессе вычисления целевого пути, задается равным значению, большему первого параметра, используемого в процессе вычисления целевого пути, когда пассажир присутствует в салоне транспортного средства. Примеры второго параметра включают в себя максимальную кривизну, темп изменения максимальной кривизны и верхнюю предельную скорость руления. Это обеспечивает возможность вычисления меньшего пути для парковки. Посредством сокращения расстояния пути для парковки, может сокращаться время, требуемое для парковки.
[0080] (8) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, второй параметр, используемый в процессе вычисления целевой скорости, задается равным значению, большему первого параметра, используемого в процессе вычисления целевой скорости, когда пассажир присутствует в салоне транспортного средства. Примеры второго параметра включают в себя верхнее предельное ускорение, верхнюю предельную угловую скорость рыскания, верхнее предельное поперечное ускорение, верхнюю предельную скорость руления, верхний предельный рывок при ускорении, верхнее предельное замедление и верхний предельный рывок при замедлении. Это обеспечивает возможность транспортному средству перемещаться на более высокой скорости, и время, требуемое для парковки, может сокращаться.
[0081] (9) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, время замедления от начала замедления до остановки транспортного средства задается коротким, чтобы получать целевую скорость; в силу этого, хотя замедление увеличивается, время операции парковки может сокращаться.
[0082] (10) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, точка завершения парковки, в которой транспортное средство управляется с возможностью останавливаться, задается равной позиции, в которой транспортное средство входит в контакт с бордюрным камнем. Время операции парковки может сокращаться, поскольку необязательно выполнять управление парковкой с допустимым запасом таким образом, что транспортное средство не ударяется о бордюрный камень.
[0083] (11) Согласно способу в одном или более вариантов осуществления настоящего изобретения, контакт шины транспортного средства с бордюрным камнем обнаруживается на основе изменения поведения транспортного средства. Это позволяет точно определять то, что транспортное средство достигает точки завершения парковки.
[0084] (12) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, транспортное средство управляется с возможностью останавливаться на вышележащей стороне или нижележащей стороне точки завершения парковки посредством второго допустимого запаса MR2 по позиции остановки. Второй допустимый запас MR2 по позиции остановки составляет значение, меньшее первого допустимого запаса MR1 по позиции остановки. Точка завершения парковки, например, представляет собой позицию бордюрного камня. Когда допустимый запас по позиции остановки задается равным относительно небольшому значению на вышележащей стороне точки завершения парковки, вероятность того, что транспортное средство входит в контакт с бордюрным камнем, является высокой. Когда допустимый запас по позиции остановки задается на нижележащей стороне точки завершения парковки, транспортное средство входит в контакт с бордюрным камнем. Когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, посредством управления транспортным средством с возможностью останавливаться около точки завершения парковки (бордюрного камня), вероятность того, что транспортное средство входит в контакт с бордюрным камнем, подтверждается, и вместо этого, время операции парковки сокращается.
[0085] (13) Согласно способу в одном или более вариантов осуществления настоящего изобретения, в случае оценки содержимого управления (пути для парковки, управляющей информации) с использованием оценочной функции, в которой весовые параметры представляют собой краткость времени, требуемого для парковки, и плавность поведения транспортного средства, когда выполняется определение того, что пассажиры не присутствуют в салоне транспортного средства, весовой параметр краткости времени, требуемого для парковки, задается равным относительно более высокому значению, и весовой параметр плавности поведения транспортного средства задается равным относительно меньшему значению. Это обеспечивает возможность вычисления пути для парковки или управляющей информации, при котором приоритет отдается сокращению времени операции парковки.
[0086] (14) Согласно способу в одном или более вариантов осуществления настоящего изобретения, устройство 10 управления вычисляет плавность поведения транспортного средства с использованием любого одного или более из рывка на основе продольной скорости, рывка на основе поперечной скорости и рывка с перемещением относительно вертикальной оси. Рывок, который означает производную по времени ускорения, представляет собой фактор, который затрагивает качество езды для пассажиров. Взвешенная величина плавности поведения транспортного средства может задаваться равной соответствующему значению с точки зрения качества езды для пассажиров.
[0087] (15) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда рабочая команда получается извне салона транспортного средства, может выполняться определение того, что пассажиры не присутствуют в салоне транспортного средства, чтобы за счет этого определять присутствие или отсутствие пассажира без использования информации по обнаружению на стороне транспортного средства (к примеру, выходного сигнала из датчика сиденья).
[0088] (16) Вышеописанный способ управления парковкой/способ отображения информации парковки может осуществляться с использованием оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения. Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения в силу этого имеет вышеописанную работу и преимущества.
[0089] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
Описание номеров ссылок
[0090] 1000 - система управления парковкой
100 - оборудование управления парковкой
10 - устройство управления
11 - CPU
12 - ROM
13 - RAM
20 - устройство ввода
21 - устройство связи
30 - устройство вывода
31 - дисплей
1a-1d - камеры
2 - устройство обработки изображений
3 - устройство измерения дальности
5 - вводное терминальное устройство
200 - бортовое устройство
40 - приводная система
50 - датчик угла поворота при рулении
60 - датчик скорости транспортного средства
70 - контроллер транспортного средства
V1 - транспортное средство
V2, V3 - другое транспортное средство
Реферат
Изобретение относится к системам помощи при парковке транспортным средством. Способ управления парковкой для управления транспортным средством для парковки на основе рабочей команды, полученной изнутри или извне транспортного средства. Способ управления парковкой содержит этапы, на которых выполняют определение того, присутствует или нет пассажир в салоне транспортного средства, и когда выполняется определение того, что пассажир не присутствует в салоне транспортного средства, управляют транспортным средством таким образом, что время операции парковки сокращается по сравнению с тем, когда выполняется определение того, что пассажир присутствует в салоне транспортного средства. Достигается повышение безопасности парковки транспортного средства. 2 н. и 13 з.п. ф-лы, 14 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство управления для транспортного средства и способ помощи водителю транспортного средства при парковке
Комментарии