Подвижное контрольное устройство (варианты) - RU2134908C1
Код документа: RU2134908C1
Чертежи































Описание
Изобретение относится к подвижному контрольному устройству и, более конкретно, к подвижному контрольному устройству, в котором наличие ненормального условия, подобного огню или вору в доме и т.п., передается наружу по проводной или беспроводной системе связи на центральное контрольное устройство или ответственным за безопасность лицам, тем самым отправляя функции защиты и предотвращения правонарушений.
Из уровня техники известно устройство, содержащее самоходный подвижный робот, снабженный контроллером, приемником и несколькими чувствительными датчиками, а также средство для приема сигналов робота и оповещение пользователя (РСТ WO 88/00747, G O8 B 19/00, 1988). Известное устройство является наиболее близким к предложенным устройствам и может быть выбрано в качестве прототипа. Известное устройство может быть использовано в системах, управляющих домашней безопасностью.
В последнее время в квартирах и односемейных домах стали устанавливать управляющие домашней безопасностью системы, содержащие одно или более пожарных устройств сигнализации, сигнализирующих о ворах-взломщиках, устройство, сигнализирующее об утечке газа, устройство, сигнализирующее о звуках, и т. п. Подобные управляющие домашней безопасностью системы, однако, теряют свою действенность, если жилец вышел или, при коммунальном проживании, когда ненормальное обстоятельство возникает в любом из индивидуальных местожительств.
В случае, когда возникает пожар или будет обнаружен вор-взломщик, известные управляющие домашней безопасностью системы автоматически информируют пост управления о ненормальном обстоятельстве. Использование такой системы требует множества кабелей и, как следствие, много времени и трудовых затрат на выполнение проводки. Следовательно, затраты на установку становятся значительными, а при установке системы в готовые конструкции увеличиваются еще больше. При коммунальном проживании, когда администратор безопасности по какой-либо причине отсутствует, совершая, например, обход или т.п., обнаружение ненормального обстоятельства задерживается, и поэтому задерживается подача сообщения о ненормальном обстоятельстве полиции или пожарным. Далее, существуют также проблемы, связанные с извещением жильца, который находится вне дома. В частности, известная система не в состоянии немедленно известить жильца о таком случае.
Аналогично, известные управляющие домашней безопасностью системы требуют, чтобы опознающие газ датчики располагались в непосредственной близости от газопроводных труб, из которых возможна утечка, и опознающие вора-взломщика датчики или опознающие звуки датчики располагались в дверях или окнах, через которые ожидается проникновение вора-взломщика внутрь помещения. Поскольку известные управляющие домашней безопасностью системы требуют использования датчиков в нескольких различных местах, обусловленные этим работы по созданию проводки исключительно сложны и сама проводка имеет неэстетичный вид. Дополнительную проблему, обусловленную использованием известных систем домашней безопасности, ставит сама проводка. В частности, проводку (или линию энергоснабжения) может перерезать вор-взломщик, тем самым делая систему безопасности неработоспособной.
Задача и краткое описание настоящего изобретения
Исходя из сказанного, задачей настоящего изобретения является решение перечисленных выше проблем путем создания подвижного
контрольного устройства, имеющего пожарную сигнализацию, сигнализацию при обнаружении воров, сигнализацию утечки газа, сигнализацию обнаруживаемых звуков и т.п., изготовление и установка которого не
требуют больших затрат.
Другой задачей настоящего изобретения является создание подвижного контрольного устройства, в котором активизация и деактивация могут осуществляться проводным или беспроводным способом связи и которое сообщает о состоянии внутри дома в полицейский участок, пожарную часть или центральному диспетчерскому пункту, а также жильцу, даже если он отсутствует.
Чтобы решить названные выше задачи, настоящее изобретение по первому варианту включает в себя подвижное контрольное устройство, содержащее самоходный подвижный робот, имеющий передающий контроллер, приемник, несколько чувствительных средств, навигационную систему для излучения ультразвуковых волн в прямом направлении и одновременного приема отраженных волн для осуществления тем самым контроля за зоной пространства, при этом навигационная система создает сигнал, характеризующий зону пространства, в котором перемещается робот, первый микрокомпьютер для приема сигнала, характеризующего зону пространства, и определения направления, в котором следует перемещаться роботу, приводное средство для создания движущей силы для перемещения в прямом или в обратном направлениях и руления, средство обнаружения поврежденной поверхности для оценки неисправного состояния несущей поверхности, причем передающий контроллер выполнен с возможностью передачи сигнала в ответ на обнаружение ненормального состояния указанными чувствительными средствами, при этом, согласно настоящему изобретению, устройство содержит средство контроля для приема сигнала, переданного передающим контроллером робота, и оповещения зарегистрированного пользователя в случае обнаружения ненормального состояния, средство автоматического управления связью для приема сигнала, переданного передающим контроллером робота, автоматического набора заданного телефонного номера в ответ на сигнал от робота, и приема команды по телефону от зарегистрированного пользователя и передачи команды в приемник робота для управления роботом.
При этом робот дополнительно содержит источник питания робота и первичное средство управления для непосредственного приема управляющих команд от зарегистрированного пользователя и запоминания секретного кода для различения зарегистрированных пользователей от незарегистрированных пользователей.
Этот источник питания содержит батарею и измеритель заряженности энергией постоянного тока для замера заряженности батареи.
Кроме того, навигационная система содержит средство возбуждения с катушкой возбуждения, возбуждаемое колебательным импульсом от первого микрокомпьютера, ультразвуковой датчик, возбуждаемый средством возбуждения с катушкой возбуждения, и обнаруживающую схему для проверки правильности работы первого микрокомпьютера.
Этот ультразвуковой датчик содержит преобразователь, выполняющий энергетические преобразования, и приемопередающее средство для периодического генерирования и приема сигнальной энергии, преобразованной преобразователем.
Указанное средство возбуждения с катушкой возбуждения включает в себя управляющее разворотом средство для магнитного приложения смещающих усилий к преобразователю и средство, генерирующее импульсы, соединенное с управляющим разворотом средством для создания смещающих усилий.
Отмеченное управляющее разворотом средство дополнительно включает в себя якорь, соединенный с преобразователем, смещенный в пространстве относительно электромагнитной катушки в нулевом положении преобразователя, при этом смещающие усилия магнитным способом приложены к якорю и направлены в противоположных направлениях.
В то же время устройство включает в себя стопорное средство для ограничения смещения преобразователя от нулевого положения до максимального угла разворота.
Помимо этого, устройство включает в себя определяющее положение средство, соединенное с управляющим разворотом средством для обнаружения нулевого положения преобразователя во время его разворачивающего смещения, и средство регулирования для управляемого изменения смещающих усилий по величине и фазе, обеспечивающее разворачивающее смещение преобразователя на указанный угол разворота в ответ на обнаружение его нулевого положения.
Вместе с тем, обнаруживающая схема включает в себя импульсное управляющее средство, соединенное с приемопередающим средством, для регулирования периодического генерирования сигнальной энергии во временной зависимости с разворачивающим смещением преобразователя.
Особенностью устройства является то, что приводное средство содержит приводной блок для перемещения робота в прямом и обратном направлениях, рулевой блок для избирательного изменения направления перемещения.
Этот приводной блок смонтирован на рулевом блоке, рулевой блок выполнен с возможностью управления от управляющего рулением блока, либо рулевой блок содержит поворотный диск, опирающийся на шестерню-солнце.
Кроме того, средство обнаружения поврежденной поверхности содержит несколько роликов, расположенных в нижней части робота, несколько рычагов, каждый из которых оснащен одним из роликов на одном конце и магнитным элементом на другом конце, и по меньшей мере, один обнаруживающий перепад элемент для определения состояния несущей поверхности в ответ на изменение положения одного или более роликов.
При этом обнаруживающий перепад элемент дополнительно содержит ячейку элемента Холла, имеющую) кристалл элемента Холла, причем ячейка элемента Холла расположена так, что оказывается противостоящей магнитному элементу, когда соответствующий один из роликов опускается ниже заданного уровня.
В данном устройстве робот может дополнительно содержать ультразвуковой датчик для излучения ультразвуковых волн и приема отраженных волн для обнаружения движения объектов, обнаруживающий инфракрасные лучи датчик для приема инфракрасных лучей для обнаружения присутствия излучающих инфракрасные лучи объектов или их движения, датчик для восприятия звуков, датчик температуры для замера окружающей температуры, датчик ионизации для обнаружения наличия огня и второй микрокомпьютер для приема выходных сигналов от каждого из датчиков для определения возникновения ненормального состояния и для возбуждения передающего контроллера, если будет установлено наличие ненормального состояния.
В этом случае ультразвуковой датчик содержит пару датчиков для излучения ультразвуковых волн и приема их после отражения.
В данном устройстве робот может дополнительно содержать источник питания робота, средство для непосредственного приема управляющих команд от зарегистрированного пользователя и для хранения секретного кода для различения зарегистрированных пользователей от незарегистрированных пользователей, ультразвуковой датчик для излучения ультразвуковых волн и приема отраженных волн для обнаружения движения материальных объектов, обнаруживающий инфракрасные лучи датчик для приема инфракрасных лучей для обнаружения присутствия излучающих инфракрасные лучи объектов или их движения, датчик ионизации для обнаружения наличия огня и второй микрокомпьютер для приема выходных сигналов каждого из датчиков, установления факта возникновения ненормального состояния и запуска передающего контроллера, если будет установлено наличие ненормального состояния.
В этом случае устройство дополнительно содержит шинную линию от первого микрокомпьютера до второго микрокомпьютера для обеспечения связи между ними.
В данном устройстве средство автоматического управления связью может содержать микропроцессор, клавиатурную входную секцию для ввода программы в микропроцессор, радиоприемную секцию для приема сигнала об обнаружении аварии и управляющего сигнала от робота, генерирующую и воспринимающую телефонные тональные сигналы секцию для вызова и ответа на вызов и для приема телефонных сообщений от внешнего пользователя, синтезирующую речь секцию для синтезирования и воспроизведения речевых сообщений в соответствии с опознанным состоянием под управлением микропроцессора, радиопередающую секцию для передачи управляющего сигнала на робот в соответствии с телефонным сообщением, принятым от внешнего пользователя, дисплейную секцию для отображения текущего состояния робота.
При этом микропроцессор соединен с телефонной линией, либо микропроцессор соединен с телефонной линией через генерирующую и воспринимающую телефонные тональные сигналы секцию, либо микропроцессор соединен с радиопередающей секцией и радиоприемной секцией, микропроцессор соединен с клавиатурной входной секцией.
Во втором варианте по настоящему изобретению подвижное контрольное устройство, помимо всех основных существенных признаков первого варианта, содержит также средство дистанционного управления роботом.
При этом робот дополнительно содержит двигатель прямого и обратного привода, который избирательно вращается в прямом или обратном направлении, основной ролик, поворачивающийся согласно с прямыми или обратными направлениями вращения двигателя, вспомогательные ролики, вращающиеся согласно с основным роликом, по меньшей мере один датчик перепада для обнаружения прерывностей в несущей поверхности или полу, средство определения состояния привода для обнаружения вращения вспомогательных роликов, рулевой двигатель для направления руления робота в соответствии с выходным сигналом первого микрокомпьютера, датчик скорости для определения скорости вращения двигателя и датчик направления руления для определения угла руления.
Как и в первом варианте, навигационная система содержит катушку возбуждения, возбуждаемую колебательным импульсом от первого микрокомпьютера, ультразвуковой датчик, возбуждаемый катушкой возбуждения, и обнаруживающую схему для проверки правильности работы первого микрокомпьютера.
Кроме того, робот дополнительно содержит обнаруживающий ультразвуковые и инфракрасные лучи датчик для излучения ультразвуковых волн и приема отраженных волн для обнаружения движения объектов и для приема инфракрасных лучей для установления присутствия или движения излучающих инфракрасные лучи объектов, датчик для восприятия звуков, датчик температуры для замера окружающей температуры, датчик ионизации для обнаружения наличия огня и второй микрокомпьютер для приема выходных сигналов от каждого из датчиков, установления факта возникновения ненормального состояния и возбуждения передающего контроллера, если будет установлено наличие ненормального состояния.
Либо робот дополнительно содержит источник питания робота, средство управления для непосредственного приема управляющих команд от зарегистрированного пользователя и для хранения секретного кода доступа для различения зарегистрированных пользователей от незарегистрированных пользователей, ультразвуковой датчик для излучения ультразвуковых волн и приема отраженных волн для обнаружения движения объектов, инфракрасный датчик, принимающий инфракрасные лучи для обнаружения присутствия или движения инфракрасных источников, воспринимающий звуки датчик для восприятия звуков, датчик температуры для измерения окружающей температуры, датчик ионизации для обнаружения наличия огня и второй микрокомпьютер для приема выходных сигналов каждого из датчиков, определения факта возникновения ненормального состояния и возбуждения передающего контроллера, если будет установлено наличие ненормального состояния.
В этом случае устройство дополнительно содержит шинную линию от первого микрокомпьютера до второго микрокомпьютера для обеспечения связи между ними.
Во третьем варианте по настоящему изобретению подвижное контрольное устройство, помимо всех основных существенных признаков первого варианта, содержит также средство обнаружения вторгающегося нарушителя для обнаружения вхождения вторгающегося нарушителя излучением ультразвуковой волны.
При этом средство обнаружения вторгающегося нарушителя содержит микропроцессор, ультразвуковой датчик для передачи и приема ультразвуковой волны, запоминающую секцию для хранения данных, обнаруженных ультразвуковым датчиком, магнитную катушку для генерирования магнитной силы для поворачивания ультразвукового датчика, магнитный датчик для управления поворотом ультразвукового датчика на заданный угол от заданной позиционной точки и радиопередатчик для оповещения о ненормальном состоянии в соответствии с решением микропроцессора.
Этот ультразвуковой датчик смонтирован на несущей опоре, имеющей на своем конце магнит.
Данная несущая опора содержит несколько крепежных осей для опоры ультразвукового датчика с возможностью свободного вращения, причем оси с обеих концов закреплены с двух сторон опоры, несущей датчик.
Кроме того, несущая опора фиксируется крепежными гайками, причем крепежные гайки вмещают подшипник и пружину.
Вместе с тем, ультразвуковой датчик соединен с микропроцессором посредством кабеля и крепежных гаек, внутри которых размещаются подшипник и пружина.
Во четвертом варианте по настоящему изобретению подвижное контрольное устройство, помимо всех основных существенных признаков первого варианта, содержит также средство принятия экстренных мер для выдачи команд о необходимых экстренных мерах и управления необходимыми экстренными мерами в ответ на обнаруженное экстренное условие для сведения к минимуму потери или ущерба.
При этом средство принятия экстренных мер содержит секцию запуска двигателя вентилятора, секцию управления газовым вентилем, привод двери для открывания двери или окна, привод жалюзи для приведения в действие жалюзи и перекрытия входного доступа и секцию тревоги.
Эта секция управления газовым вентилем и привод двери сопряжены с соленоидом, включаемым при обнаружении утечки газа указанным контрольным устройством.
Указанный привод жалюзи сопряжен с соленоидом, включаемым при обнаружении вторгающегося нарушителя указанным контрольным устройством.
Названные выше и другие задачи и цели настоящего изобретения а также преимущества настоящего изобретения станут ясны из следующего описания, которое ведется со ссылками на приложенные чертежи.
На этих чертежах одинаковые цифровые позиции и символы используются для обозначения одинаковых или эквивалентных узлов и секций, что сделано для упрощения иллюстраций и объяснений.
Краткое описание приложенных чертежей.
Фиг. 1 является схематичным чертежом, иллюстрирующим предпочтительный вариант осуществления подвижного контрольного устройства.
Фиг. 2(a) и 2(b) являются блок-схемами робота, соответствующего настоящему изобретению.
Фиг. 2(c) и фиг. 2(d) - блок-схемы, иллюстрирующие работу робота и контрольного устройства, соответствующих настоящему изобретению.
Фиг. 3 является принципиальной схемой клавиатуры и дисплея, соответствующих настоящему изобретению.
Фиг. 4(a) является видом робота в разрезе, иллюстрирующим конструкцию рабочего устройства.
Фиг. 4(b) является поперечным сечением рабочего устройства, выполненным по линии I-I фиг. 4(a).
Фиг. 4(c) является продольным сечением рабочего устройства, выполненным по линии II-II фиг. 4(a).
Фиг. 5(a) является приводной схемой для прямого и обратного привода робота.
Фиг. 5(b) является приводной схемой рулевого двигателя, управляющего направлением движения робота.
Фиг. 6(a) является видом снизу робота, к которому прикреплено средство обнаружения поврежденной нижележащей поверхности (пола).
Фиг. 6(b) является вертикальной проекцией робота, иллюстрирующей структуру средства обнаружения поврежденной поверхности.
Фиг. 6(c) является перспективным видом средства обнаружения неисправной поверхности.
Фиг. 6(d) является видом сбоку средства, представленного фиг. 6(b).
Фиг. 6(e) является перспективным видом датчика перепада средства обнаружения поврежденной поверхности.
Фиг. 6(f) является кинематической схемой средства обнаружения поврежденной поверхности.
Фиг. 7(a) является принципиальной схемой средства обнаружения поврежденной поверхности.
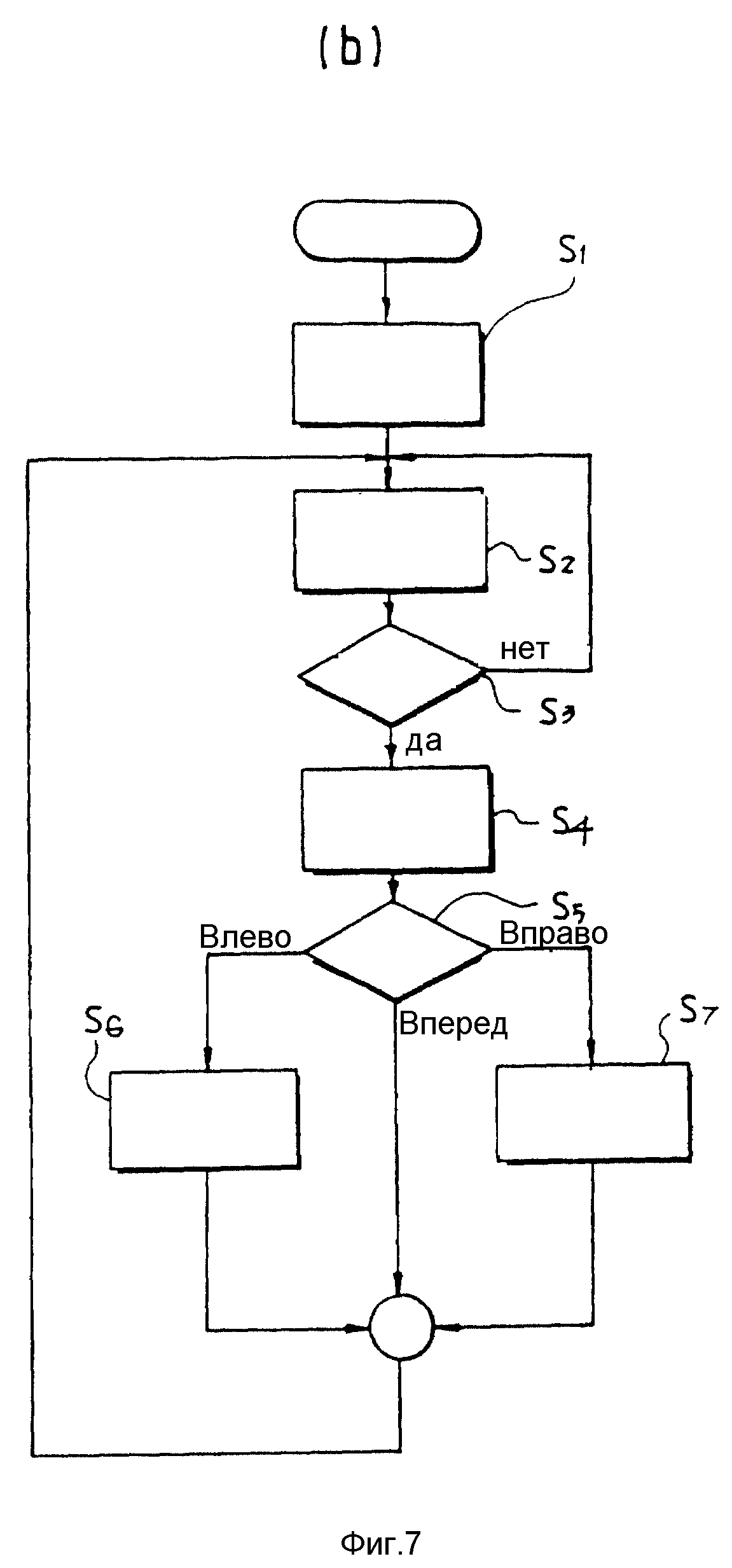
Фиг. 7(b) является блок-схемой, иллюстрирующей рабочую последовательность операций средства обнаружения поврежденной поверхности.
Фиг. 8(a) является перспективным видом электроакустического преобразователя навигационной системы.
Фиг. 8(b) является продольным сечением преобразователя, выполненным вдоль линии II-II фиг. 8(a).
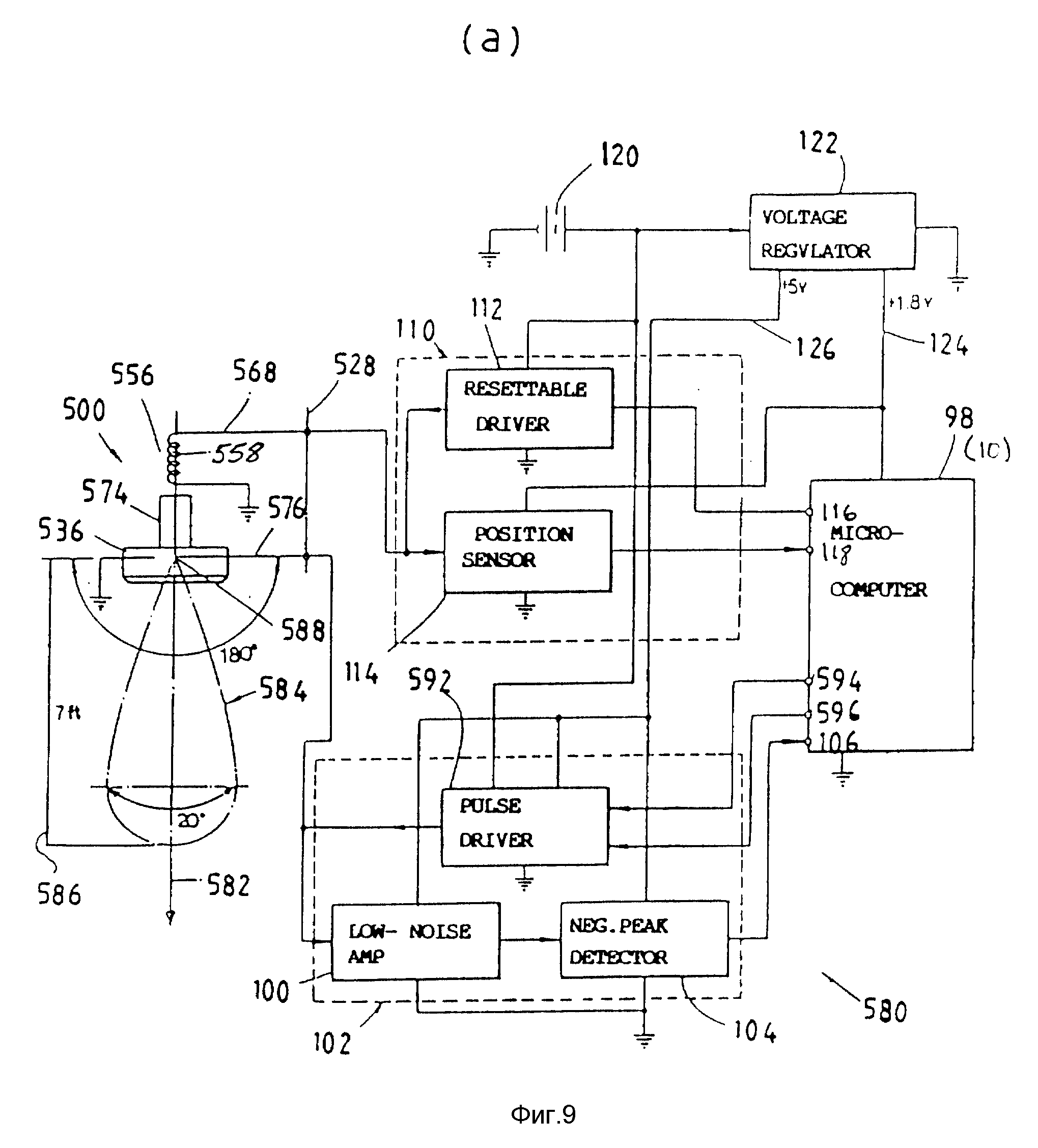
Фиг. 9(a) является блок-схемой навигационной системы, с которой сопряжен преобразователь.
Фиг. 9(b) представляет схему, использованную на фиг. 9(a).
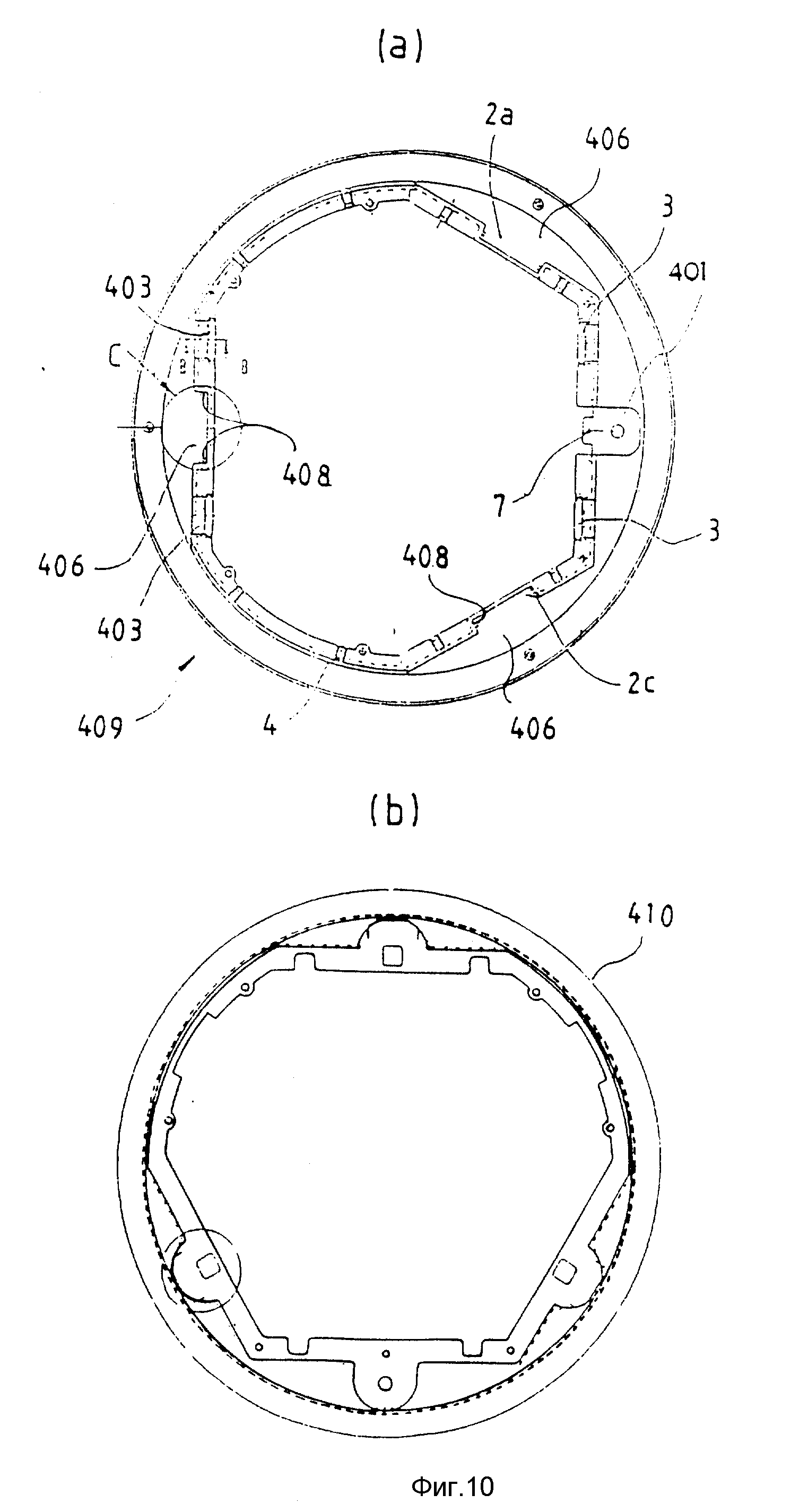
Фиг. 10(a) является видом сверху нижнего плоского элемента, на котором установлено несколько датчиков.
Фиг. 10(b) является видом сверху решетки в верхней части нижнего плоского элемента.
Фиг. 10(c) является частичным вертикальным разрезом робота в состоянии, в котором устанавливаются датчики.
Фиг. 10(d) - частичный вид сзади робота, на котором показаны датчики.
Фиг. 11(a) является перспективным видом ультразвукового датчика, соответствующего другому варианту осуществления настоящего изобретения.
Фиг. 11(b) по фиг. 11(e) представляют рабочие состояния ультразвукового датчика, соответствующего варианту осуществления, представленному на фиг. 11(a).
Фиг. 11(f) является блок-схемой, иллюстрирующей конструкцию и управление датчиком.
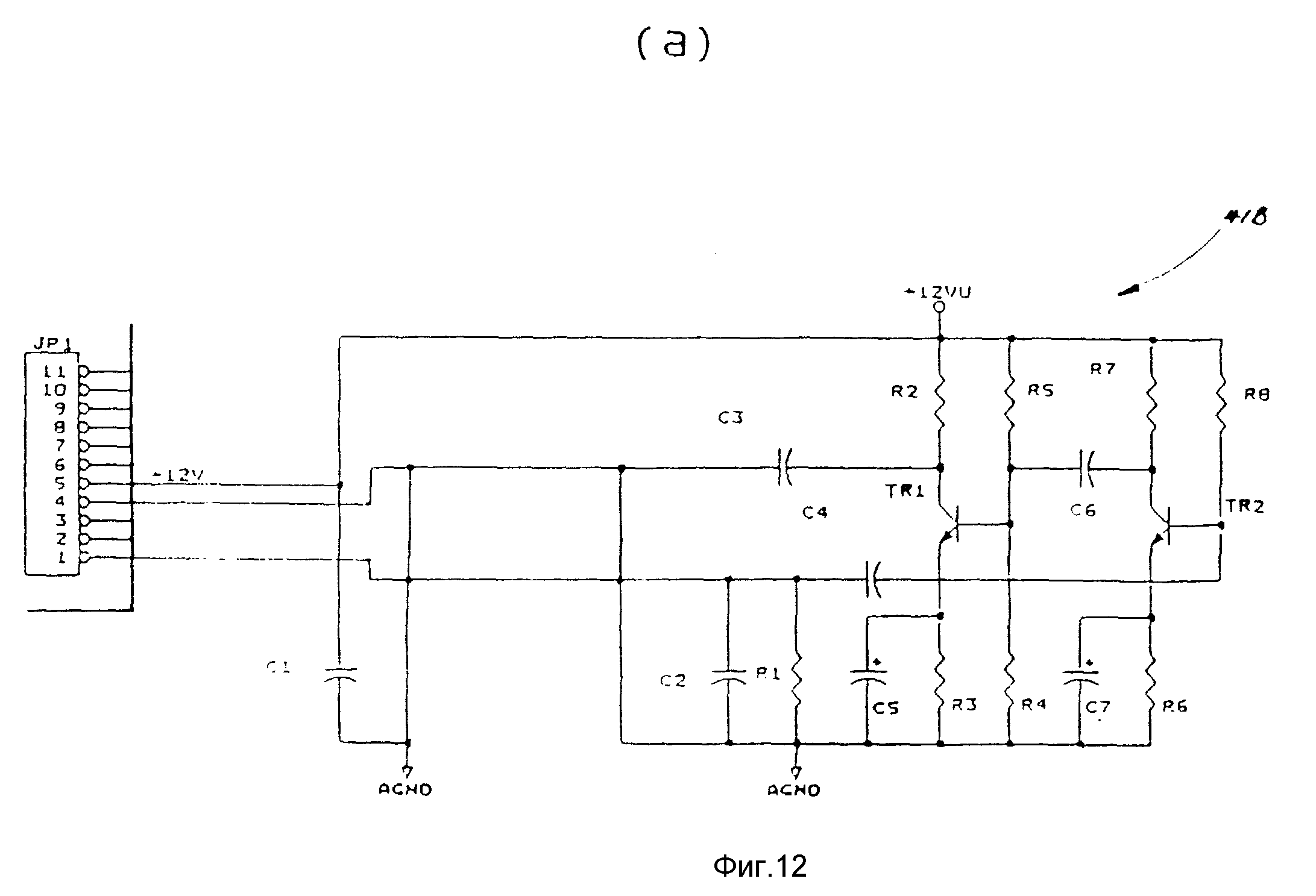
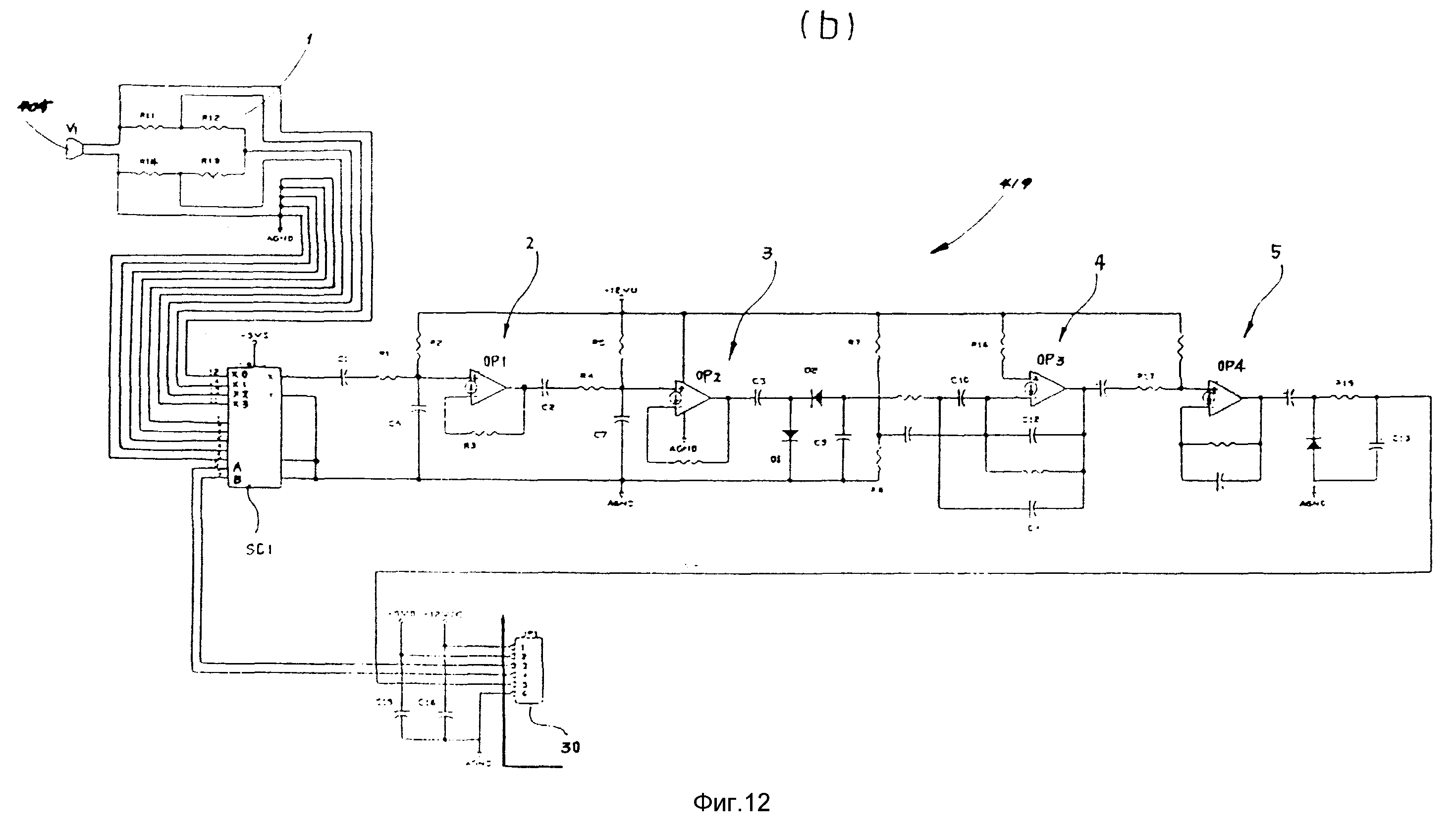
Фиг. 12(a) является принципиальной схемой ультразвуковой передающей секции.
Фиг. 12(b) является принципиальной схемой ультразвуковой принимающей секции, обнаруживающей подвижный объект.
Фиг. 13 является принципиальной схемой инфракрасного чувствительного узла.
Фиг. 14 является принципиальной схемой звукового чувствительного узла.
Фиг. 15 является принципиальной схемой сигнального приемо-передающего узла.
Фиг. 16 является принципиальной схемой энергообеспечивающего узла робота.
Фиг. 17 является принципиальной схемой управляющего энергообеспечения узла робота.
Фиг. 18 является принципиальной схемой восстанавливающего систему узла.
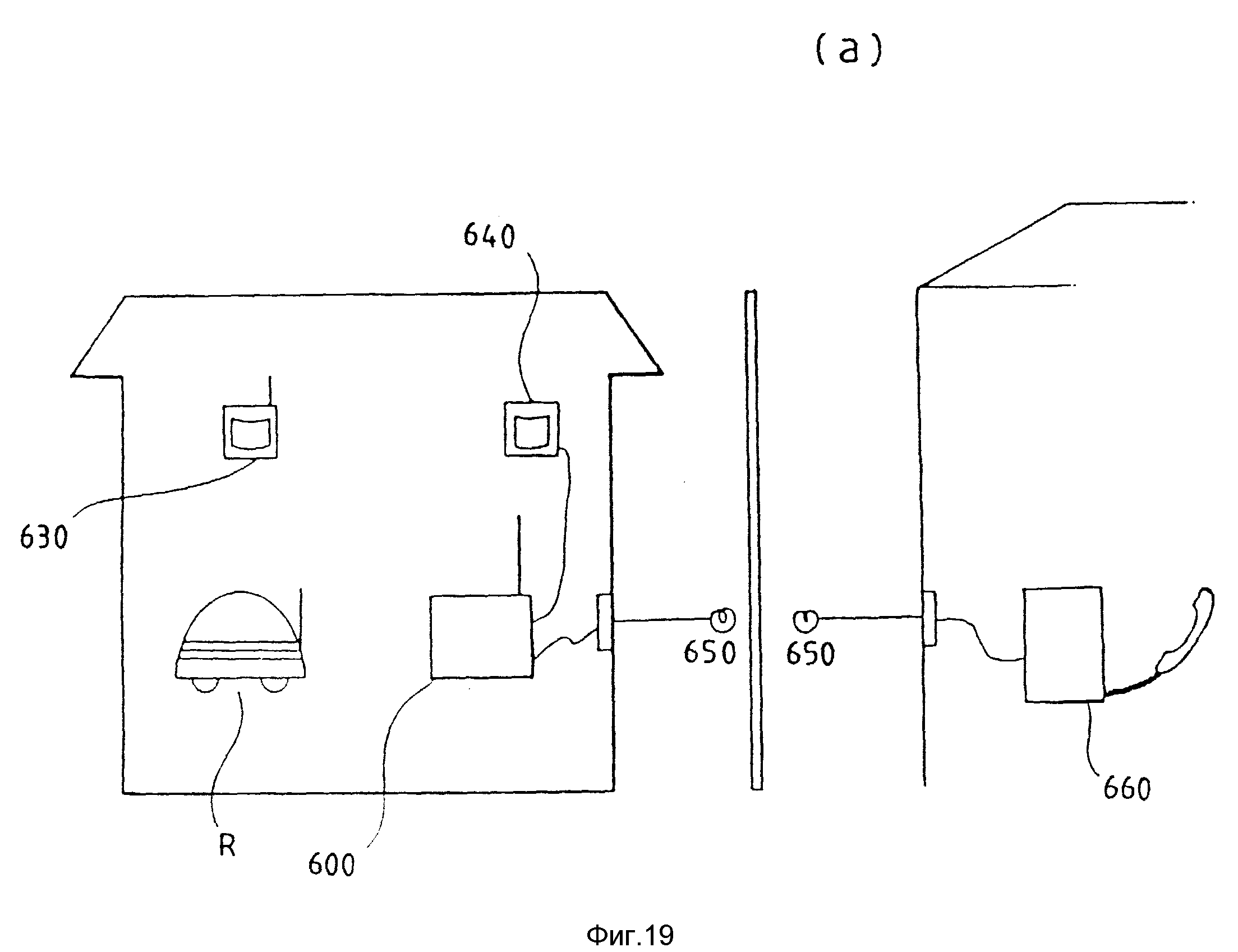
Фиг. 19(a) является схематичным изображением средства автоматического управления связью.
Фиг. 19 (b) является блок схемой устройства, представленного фиг. 19a.
Фиг. 19(c) является блок-схемой, иллюстрирующей последовательность операций средства автоматического управления связью.
Фиг. 20(a) является боковым видом средства обнаружения вторгающегося объекта (нарушителя), соответствующего предпочтительному варианту осуществления настоящего изобретения.
Фиг. 20(b) представляет вид спереди вертикального разреза устройства, представленного на фиг. 20(a).
Фиг. 20(c) представляет рабочий вид средства обнаружения нарушителя.
Фиг. 20(d) является блок-схемой, иллюстрирующей последовательность операций средства обнаружения нарушителя.
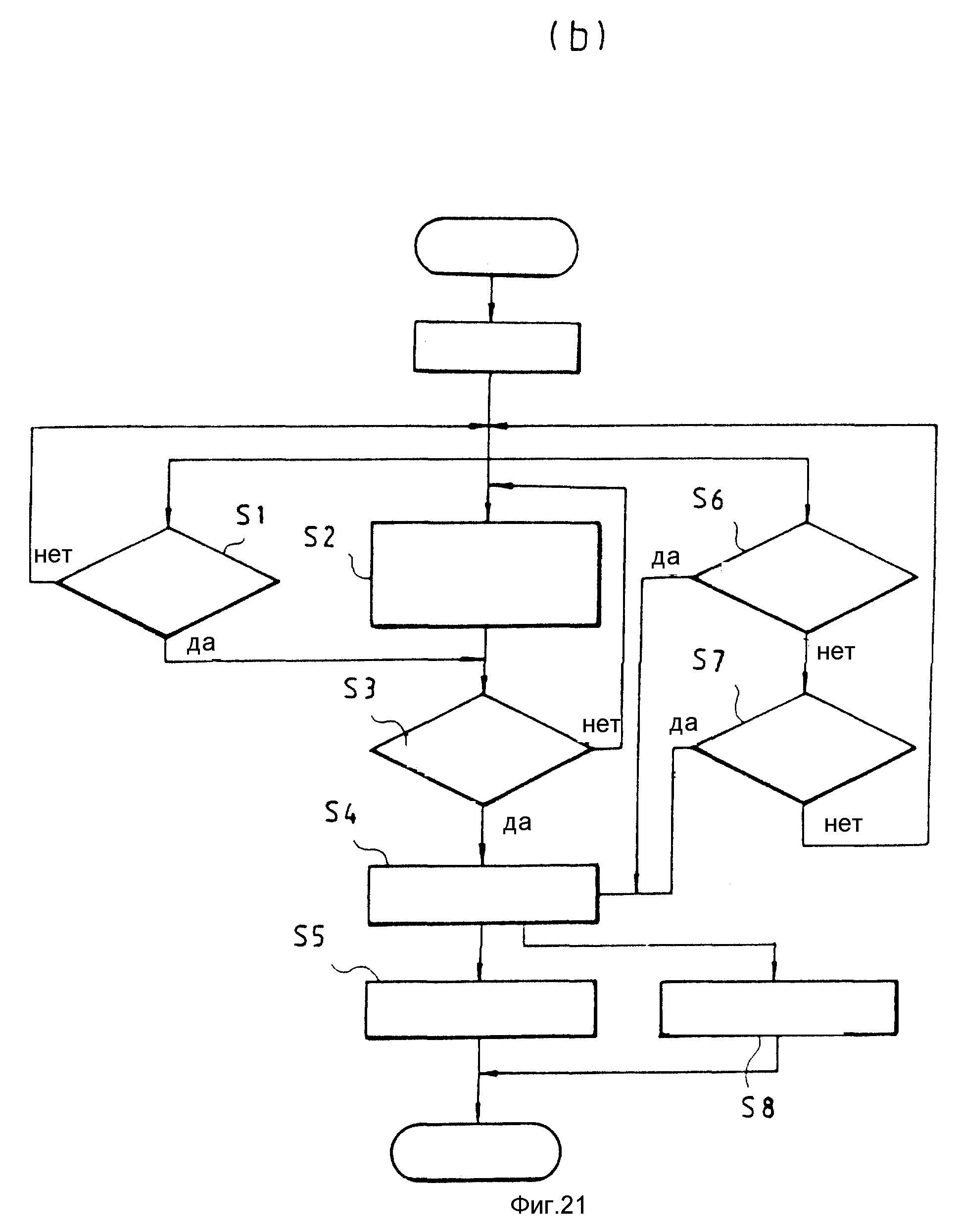
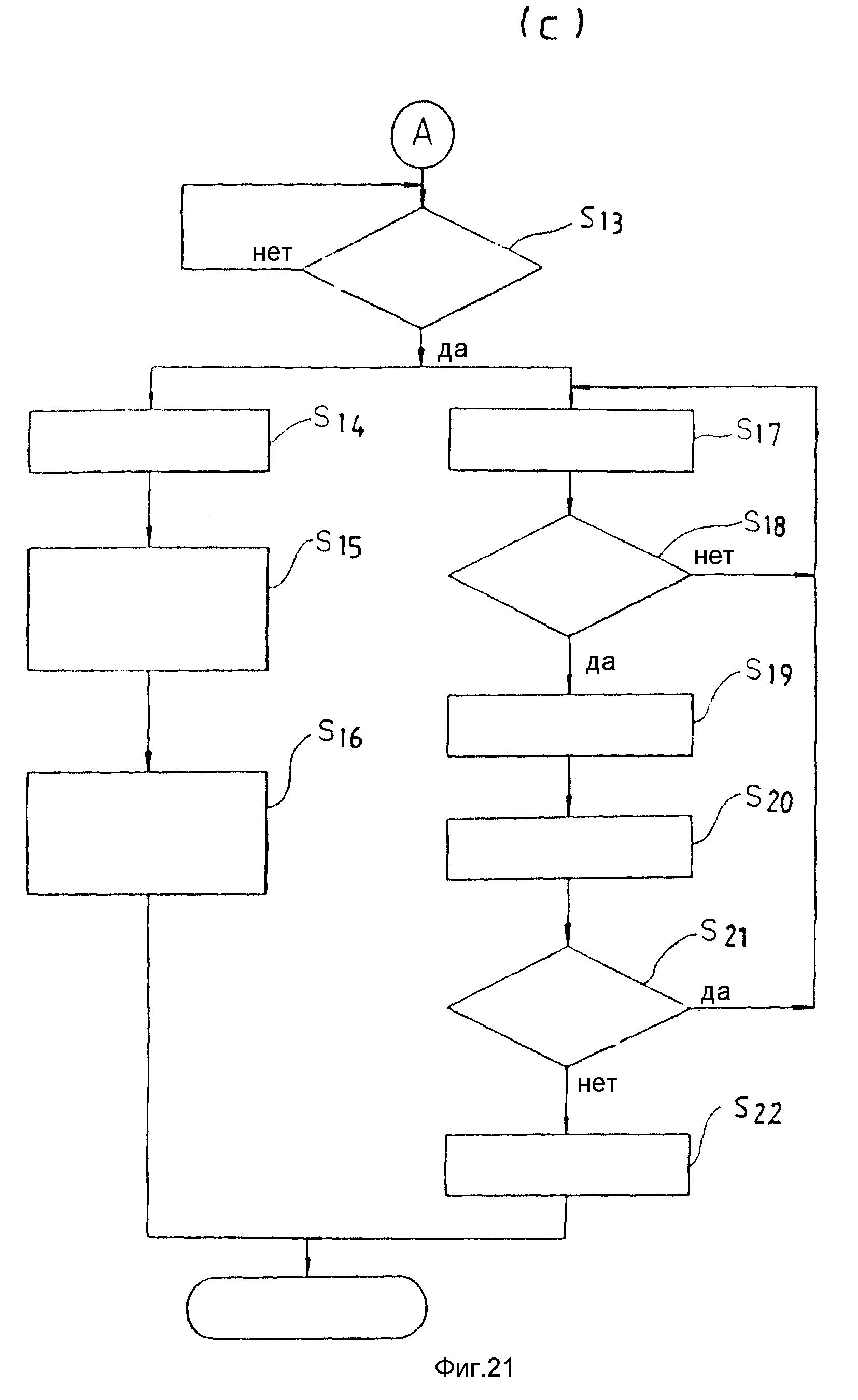
Фиг. 21(a) является блок-схемой средства принятия экстренных мер, соответствующего настоящему изобретению.
Фиг. 21(b) по фиг. 21 (c) являются блок-схемами, иллюстрирующими последовательность операций средства принятия экстренных мер.
Ниже подробно описаны предпочтительные варианты осуществления настоящего изобретения со ссылками на приложенные чертежи.
Фиг. 1 является эскизом, иллюстрирующим конструкцию подвижного контрольного устройства, соответствующего предпочтительному варианту осуществления настоящего изобретения. В частности, фиг. 1, 2(a) и 2(d) представляют РЧ (радиочастотный) дистанционный контроллер A, функционирующий как средство дистанционного управления, и робот R, имеющий клавиатуру 31 для приема команд от пользователя, навигационную систему 60 для излучения ультразвуковых волн для целей обнаружения, причем навигационную систему активизирует пользователь путем ввода операционной команды посредством клавиатуры, основной ролик 9, который вращается и управляется двигателем прямого и обратного привода 44 и рулевым двигателем 45, соответственно, в ответ на выходной сигнал навигационной системы 60, и два дополнительных ролика 7A и 7B, вращающихся вместе с основным роликом 9.
Предусмотрено наличие антенны 4, посредством которой наличие или отсутствие ненормального состояния внутри дома или конторы передается в ответ на сигнал обнаружения от датчиков, которые размещены внутри робота R, причем датчики способны обнаруживать присутствие или отсутствие нарушителя, утечки газа, звуков, инфракрасных лучей, создаваемых окружающей температурой, светом или человеческим телом и т.п. Когда обнаружено ненормальное состояние, подается сигнал управления в соответствии с передающим контроллером 32 на монитор М, который принимает переданный сигнал и который в свою очередь генерирует сигнал тревоги о существовании ненормального состояния.
Средство автоматического управления связью AD также принимает переданный сигнал от робота R и автоматически извещает о возникновении ненормального состояния по телефону пользователя, который может находиться вне дома, и одновременно полицейский участок, пожарную часть или центральный наблюдательный пункт, подобный охранному отделению. Также изображены на фиг. 1 ультразвуковой датчик 29, инфракрасный датчик 34 и корпус 8 робота R.
Средство автоматического управления связью AD выполняет функцию укороченного номеронабора, которая обеспечивает автоматический набор телефонного номера, когда внутри дома или офиса обнаруживается ненормальное состояние, причем ненормальное состояние обнаруживается разнообразными датчиками, размещенными на роботе R или где-то еще. Средство автоматического управления связью AD автоматически набирает номер телефона полицейского участка, пожарной части или центрального наблюдательного пункта, подобного диспетчерскому пункту, в ответ на сигнал, переданный например, от антенны 4. Далее, средство автоматического управления связью AD имеет функцию телефонного приема, которая позволяет зарегистрированному пользователю дистанционно активизировать робот R посредством телефонного звонка. Хотя на этой фиг. изображена кабельная телефонная система, такая система, конечно, может быть беспроводной телефонной системой.
Далее, конструкция и работа будут описаны со ссылками на фиг. 2(a) и фиг. 2(b). Как показано на фиг. 2(a) и фиг. 2(b), предусмотрено наличие первого и второго микрокомпьютеров 10 и 30, клавиатуры 31, функционирующей в качестве первичного управляющего средства, которое вводит оперативные команды и запоминает секретный код, причем секретный код в свою очередь дает доступ исключительно зарегистрированным пользователям навигационной системы 60, которая принимает сигнал (или командный сигнал) от первичного управляющего средства 31 через посредство двух микрокомпьютеров 10 и 30 и которая, чтобы оценить окружающее пространство, излучает ультразвуковые волны в прямом направлении с левой и правой сторон, охватывающие приблизительно 180o угол и одновременно принимает отраженные волны, первого микрокомпьютера 10 для вынесения решения: надо или нет перемещаться в определенном направлении, когда сигнал обнаружения вводится в входной терминал IN 2 для определения окружающего пространства через посредство навигационной системы 60, двигатель 44 прямого и обратного привода, который, если сделано решение о возможности прямого или обратного перемещения в соответствии с решающим сигналом от первого микрокомпьютера 10, выполняет вращение в прямом или обратном направлении, соответственно, в соответствии с выходным сигналом приводного средства для перемещения в прямом и обратном направлениях 44a, которое в свою очередь, управляет прямыми и обратными перемещениями в ответ на выходной сигнал от выходного порта PORTI первого микрокомпьютера, 10, основной ролик 9 для перемещения в любом направлении с использованием мощности двигателя прямого и обратного привода 44, пара дополнительных роликов 7A и 7B для перемещения в любом направлении совместно с приводимым в движение основным роликом 9, правый и левый датчики перепадов 46 и 47, которые опознают состояние поверхности пола, чтобы предотвратить падение робота R при перемещении и которые после обнаружения ступенчатой или пороговой части поверхности пола прекращают движение в прямом направлении и начинают перемещение в обратном направлении на заданное расстояние, причем датчики 46 и 47 размещены так, чтобы подавать сигнал о ступенчатой части на входной порт PORT 3 первого микрокомпьютера 10, правый и левый датчики состояния привода 48 и 49 для определения состояния привода дополнительных роликов 7A и 7B, рулевой двигатель 45 для выполнения прямого и обратного вращения в соответствии с выходным сигналом рулевой приводной схемы 45a, которая управляет поворотами вправо и влево в соответствии с выходным сигналом от выходного порта PORT2 первого микрокомпьютера 10 в ответ на опознанные сигналы от правого и левого датчиков перепадов 46 и 47 и правого и левого датчиков состояния привода 48 и 49, каждый из которых входит через входной порт PORT3 первого микрокомпьютера 10, датчик скорости 50 для замера скорости движения, и определяющий направление руления датчик 51 для определения угла руления. Приводная система робота R выполнена таким образом, что способна управлять скоростью и углом руления двигателя 44 прямого и обратного привода и рулевого двигателя 45, соответственно, по выходным сигналам каждой из управляющих двигателями схем 44a и 45a, в то время как выходные сигналы датчика скорости 50 и датчика 51 определения направления руления поступают на входной порт PORT4.
В дополнение к названной выше приводной системе робот R настоящего изобретения содержит ультразвуковой датчик 29, который испускает ультразвуковые волны и одновременно принимает отраженные волны, тем самым определяя движение материальных объектов (включая одушевленные объекты) и инфракрасный датчик 34, который также способен принимать инфракрасные лучи, испускаемые человеческим телом, с помощью которых осуществляется обнаружение перемещения материальных объектов, включая людей, воспринимающий звуки датчик 35, который питается от батареи 37 и обнаруживает звуки, как, например, треск стекла или плачь или крики ребенка, и второй микрокомпьютер 30, который принимает обнаруженные сигналы от датчиков 34 и 35 и дополнительно принимает сигналы от датчика 39, измеряющего окружающую температуру, и датчика ионизации 40 для обнаружения наличия огня. Очевидно, робот в состоянии решить: существует или нет внутри дома или офиса ненормальное состояние. При возникновении ненормального состояния передающий контроллер 32 приводится в действие, чтобы выполнить передачу на монитор M и средство автоматического управления связью AD через антенну 4.
Как показано на фиг. 2(a) и фиг. 2(b), 15 МГц синусоидальный сигнал от кварцевого генератора 41 поступает на входной ввод XTAL2 второго микрокомпьютера 30. Дополнительно, 15 МГц синусоидальный сигнал от кварцевого генератора 43, поступает на входной ввод XTALL первого микрокомпьютера 10. Шинная линия 75 служит связным звеном между первым микрокомпьютером 10 и вторым микрокомпьютером 30, чем обеспечивается выполнение команд, относящихся к условиям или работе микрокомпьютеров 10 и 30. Выход "имитация" 57 для тестирования рабочего состояния робота R соединен через буфер 58 со средней точкой шинной линии 75.
Далее работа подвижного контрольного устройства будет описана, в основном со ссылками на фиг. 2(a) и фиг. 2(b). Когда пользователь нажимает какую-либо клавишу на клавиатуре 31, чтобы подать команду роботу R (или делает это дистанционно), импульс, приводящий в действие навигационную систему 60, исходит из выходного порта PORT5 первого микрокомпьютера 10. Этот импульс возбуждает схему возбуждения 62, которая в свою очередь возбуждает катушку возбуждения 63, имеющуюся на датчике, изображенном на фиг. 8(a) и описанном ниже. Таким образом катушка возбуждения 63 косвенно управляется импульсом от выходного порта 6. Сигнал от катушки возбуждения 63 сначала поступает на усилитель 63a, чтобы подтвердить возбужденное состояние катушки возбуждения 63, и затем поступает на аналоговый входной вывод INI первого микрокомпьютера 10 для подтверждения позиционирования преобразователя 64. Импульс, поступающий на катушку 63, задает колебательное движение той части датчика, которая представляет собой в данном случае ультразвуковой датчик, представленный на фиг. 8(a). Подача импульса на эту катушку вскоре после того, как магнит, прикрепленный к задней части катушки, изменит местоположение катушки, приводит к возникновению колебательного движения, о котором будет сказано подробно ниже со ссылками на фиг. 8.
Преобразователь 64 излучает ультразвуковые волны, в основном, перед роботом внутри угла приблизительно 180o во время своих колебаний и одновременно принимает отраженные ультразвуковые волны. Результирующий сигнал затем синхронизируется и усиливается на синхронизирующем усилителе 64a и затем фильтруется от шумовой составляющей на детектирующем фильтре 64b. Результирующий сигнал от фильтра 64b затем поступает на первый микрокомпьютер 10 через входной вывод IN2. Затем эти два сигнала (излученный ультразвуковой и отраженный) сравниваются в первом микрокомпьютере 10, и результат сравнения используется для определения расстояния до объекта в зависимости от времени излучения и отражения. Направление на объект можно определить путем фиксирования угла датчика в момент излучения импульса, причем этот угол можно определить путем синхронизации импульса относительно колебательного движения датчика, изменения которого можно осуществить с входа порта IN1.
Навигационная система 60 дополнительного содержит буфер 65 для ввода частоты 52 КГц от выходного вывода "колебания" OSC OUT первого микрокомпьютера 10 на преобразователь 64. Далее обнаруживающая схема 66 проверяет; является ли микрокомпьютер 10 вообще функционирующим. Выходной сигнал обнаруживающей схемы 66 подается на входной вывод NM1 первого микрокомпьютера 10, чтобы при возникновении ненормального состояния был предпринят шаг по устранению причины ненормальной работы путем сброса и повторного запуска микрокомпьютера или, наоборот, был подан сигнал тревоги. Хотя в приведенном выше описании описан способ управления роботом R путем нажима пользователем некоторой клавиши на клавиатуре 31, так же возможно подавать команду роботу R воздействием на клавиатуру радиочастотного дистанционного контроллера A. Аналогично, когда пользователь отсутствует, возможно управление роботом дистанционно, связываясь с ним по телефону.
В случае использования радиочастотного дистанционного контроллера командный сигнал от радиочастотного дистанционного контроллера А принимает приемник 33 второго микрокомпьютера 30 и затем усиливается усилителем 33a, после чего подается на входной порт PORT9, активизируя робот R.
Источник питания 70 робота R содержит выпрямитель 36, батарею 37 и измеритель уровня заряда постоянным током 38. Переменный ток 100 В или 220 В, поступающий на входной вывод "питание", преобразуется в постоянный ток выпрямителем и заряжает батарею 37. Заряд постоянным током батареи 37 и уровень заряда постоянным током определяются измерителем уровня заряда 38. Питание также подается на вывод "сброс" и входной вывод IN3 первого микрокомпьютера 10, а также на входной порт PORT11 второго микрокомпьютера 30, чем обеспечивается электропитание робота R. С другой стороны, когда измеритель 38 обнаруживает, что уровень заряда стал меньше некоторого заданного уровня, перемещения робота R прекращаются и используются лишь разнообразные функции датчиков и памяти первого и второго микрокомпьютеров 10 и 30.
Ниже описана последовательность рабочих операций подвижного контрольного устройства со ссылками на блок-схемы фиг. 2(c) и 2(d). Каждый блок S1 по S23 на фиг. 2(c) и фиг. 2(d) представляет определенную операцию. Как показано на чертежах, после заряда батареи 37 до заданного уровня, когда на клавиатуру 31 оказывается воздействие непосредственно внутри дома или офиса или когда активизация производится дистанционно по телефону в отсутствие пользователя, подвижное контрольное устройство становится работоспособным. Командный сигнал вводится в входной порт "команда" PORT 7, изображенный на фиг. 2(b), или, в случае дистанционного управления, входной порт PORT9 второго микрокомпьютера 30. Затем кварцевый генератор 41 генерирует частоту 15 МГц, сигнал которой поступает на второй микрокомпьютер 30. Одновременно с этим кварцевый генератор генерирует частоту 15 МГц, сигнал которой поступает на первый микрокомпьютер 10. Затем инициализируется робот R, после чего он оказывается работоспособным (операция S1). Затем командный сигнал поступает через шинную линию 75 на первый микрокомпьютер 10, после чего он отображает на дисплее 42 показание, означающее, что робот R находится в нормальном состоянии, и в то же самое время переходит к операции S2, при которой возбуждается навигационная система 60, изображенная на фиг. 8(a) и т.д.
В частности, сигнал для возбуждения катушки возбуждения схемы 62 возбуждения подается с выходного порта PORT5 первого микрокомпьютера 10, возбуждая катушку 63 возбуждения, которая заставляет преобразователь начать колебаться вперед-назад. Выходной сигнал, возникающий в результате возбуждения катушки 63 возбуждения, усиливается усилителем 63a, и выходной сигнал, который используется для локализации электроакустического преобразователя 64 на траектории его колебания, подается на аналоговый входной вывод IN1 первого микрокомпьютера 10. При возбуждении катушки 63 возбуждения преобразователь 65 поочередно передвигается в прямом и обратном направлениях. Синусоидальный сигнал 52 МГц поступает от выходного вывода "колебания" OSC OUT первого микрокомпьютера 10 через буфер 64 на преобразователь 64. Преобразователь 64 испускает ультразвуковую волну и принимает ее отражение. Испущенная ультразвуковая волна и ее отражение усиливаются совместно синхронизирующим усилителем 64a для синхронизации и усиления, и затем шумовая компонента отфильтровывается на детектирующем фильтре 64b. Затем результирующий сигнал подается на аналоговый входной вывод IN2 первого микрокомпьютера 10.
После перехода к операции S3 названные выше сигналы и сигнал на входном выводе IN1 сравниваются и анализируются первым микрокомпьютером 10 для определения расстояния от объекта и направление на объект. При операции S4 двигатель 44 прямого и обратного привода и рулевой двигатель 45 запускаются после определения расстояния и направления, в результате чего робот R приходит в движение. Во время движения робота R работают левый и правый датчики перепада 46 и 47, определяющие состояние привода датчики 48 и 49, датчик скорости 50 и датчик 51 определения направления руления.
При операции S5 выполняется проверка факта активизации одного из датчиков перепада 45 и 47. Например, если активизирован левый датчик перепада 46 (чему соответствует YES (да) на фиг. 3a), то выходной сигнал левого датчика перепада 46 поступает на входной вывод PORT3 первого микрокомпьютера 10 и заставляет появиться на выходном порту PORT1 сигнал, который прекращает перемещение двигателя 44. При операции S22 двигатель 44 прямого и обратного привода останавливается, и прекращается вращение основного ролика 9 и правого и левого дополнительных роликов 7A и 7B, которые работают совместно с основным роликом 9. При операции S23 двигатель 44 прямого и обратного привода кратковременно вращается в обратном направлении для осуществления движения в обратном направлении на заданное расстояние, после чего происходит возврат к операции S3.
С другой стороны, если при операции S5 датчик перепада не активизируется, происходит переход к операции S6, при которой выполняется проверка: работает ли один из дополнительных роликов 7A и 7B совместно с основным роликом 9. Если один или два дополнительных ролика не работают, операция S22 выполняется, как описано это выше. Наоборот, когда дополнительные ролики 7A и 7B вращаются должным образом, происходит переход к операции S7, при которой двигатель 44 прямого и обратного привода продолжает перемещать робот R в прямом направлении. При операции S8 выполняется проверка факта обнаружения навигационной системой 60 любого препятствия. Если будет обнаружено любое препятствие, сигнал, свидетельствующий об этом обнаружении, подается на входной порт PORT3 первого микрокомпьютера 10. В результате этого микрокомпьютер 10 прекращает вращение основного ролика 9 и дополнительных роликов 7A и 7B. Затем, в ходе выполнения операции S9 подается питание на рулевой двигатель 45 для изменения направления движения робота R. Далее, в ходе выполнения операции S10, начинается прямолинейное перемещение в новом направлении на расстояние, заданное навигационной системой 60. При операции S11 робот останавливается в том месте, где обнаружены вор-взломщик, огонь, звук, ненормальная температура окружающей среды и т.п.
Если при операции S8 не будет обнаружено препятствие, то выполняется операция S10 вместе с операциями, следующими за операцией S10.
Затем, когда робот R остановлен, выполняется операция S13, изображенная на фиг. 2(d), путем излучения ультразвуковой волны датчиком 29 и приема ее отражения, а также приема инфракрасных лучей, которые излучает человеческое тело. Таким образом, обнаружение вора-взломщика и его перемещение осуществляется с помощью ультразвукового датчика 29 и инфракрасного датчика 34. Затем выполняется операция S14, при которой определяется факт наличия вора-взломщика. Если взломщик отсутствует, то происходит возврат к операции S13, и повторяется операция, следующая за операцией S13. Если это так, то операция S15 исполняется после подачи сигнала вторым микрокомпьютером 30, который подает питание на передающий контроллер 32, который в свою очередь, передает сигнал через антенну 4, и этот сигнал приводит в действие монитор М и автоматическое телефонное передающее средство AD. Далее, при выполнении операции S16, поскольку монитор M и автоматическое телефонное передающее средство AD одновременно приводятся в действие переданным сигналом, зарегистрированный пользователь, имеющий при себе монитор M во время отсутствия дома, оповещается одновременно с автоматическим набором телефонного номера полицейского участка, пожарной части или центрального наблюдательного пункта, подобного пульту охраны, о факте обнаружения ненормального состояния внутри дома или офиса. Соответственно рабочий цикл на этом для подвижного контрольного устройства завершается.
С другой стороны, если будет обнаружен сравнительно громкий звук (шум) при операции S12, изображенной на фиг. 2(d), аналоговый выходной сигнал вводится через входной вывод IN4 второго микрокомпьютера 30. Затем выполняется операция S15, а также последующие за операцией S15 операции, как это описано выше. В случае, если никаких звуков не обнаружено, выполняется последняя операция, при которой рабочий цикл подвижного контрольного устройства завершается.
К тому же, при операции S17, если нет внезапных температурных изменений во время изменений с целью определения изменений температуры окружающего воздуха, выполняется операция S18. При операции S18 определяется наличие ионизации. Если она есть, т.е. если обнаружены частицы дыма, свидетельствующие об открытом огне, сигнал подается на входной вывод IN3 второго микрокомпьютера 30. Затем выполняется переход к операции S15, после чего выполняются последующие за ней операции, как описано выше. Если при операции S18 ионизация не будет обнаружена, то выполняется последняя операция, при которой завершается рабочий цикл подвижного контрольного устройства. С другой стороны, если датчик окружающей температуры 39 обнаружит внезапное изменение окружающей температуры при операции S17, сигнал подается на входной порт IN3 второго микрокомпьютера 30. Затем выполняются операции S15 и последующие за ней операции, как описано выше.
В описании блок-схемы, изображенной на фиг. 2(c) и фиг. 2(d), в качестве примеров при изложении содержания операций S5 и S6 взяты левый датчик перепада 46 и левый определяющий состояние привода датчик 48. Поскольку должно быть ясно, что правый датчик перепада 47 и правый определяющий состояние привода датчик 49 работают точно также, как и левые, примеры, относящиеся к правосторонним компонентам, опущены.
Ниже подробно описана конфигурация робот-систем, относящихся к предпочтительному варианту осуществления. Фиг. 3 представляет конфигурацию клавиатуры 31 и дисплея 42. Клавиатуры содержат 10 клавиш, каждой из которых присвоена некоторая определенная функция в соответствии с настоящим изобретением. Дисплей 42 имеет несколько дисплейных средств, например, светоизлучающие диоды и т.п., для отображения определенных функций, выбираемых воздействием на определенные клавиши на клавиатуре 31, и для отображения операции заряда батареи, которая описана ниже.
Более конкретно, как показывает фиг. 3, клавиатура 31 и дисплей 42 содержат кольцевой счетчик СТ1, который выдает сигналы, последовательно сдвинутые, по тактовому сигналу, поступающему через входной вывод "тактовый сигнал" KEYO. Кольцевой счетчик СТ1 соединен своими выходными выводами Q0 по Q4 с соответствующими базами транзисторов TR1 по TR5 через несколько инверторов IN1 по IN5, которые образуют схему запуска, и несколько резисторов R1 по R5. Транзисторы TR1 по TR5 соединены каждый своими эмиттерами с источником питания 12 В и соединены коллекторами с соответственными выводами светоизлучающих диодов дисплея 42, соответственно. Другими словами, транзистор TR1 соединен коллектором с одним выводом отображающего функцию "задержка" светоизлучающего диода D5 и одним выводом отображающего функцию "блокирование" светоизлучающего диода D10, и транзистор TR2 соединен коллектором с одним выводом отображающего функцию "временная секретная кодовая идентификация", светоизлучающего диода D4 и одним выводом отображающего функцию "странствование" светоизлучающего диода D9. Транзистор TR3 соединен коллектором с одним выводом отображающего функцию "идентификация" светоизлучающего диода D3, одним выводом отображающего функцию "охрана" светоизлучающего диода D8 и одними выводом отображающего функцию "заряд батареи" светоизлучающего диода D13, и транзистор TR4 соединен своим коллектором с одним выводом отображающего функцию "тревога" светоизлучающего диода D2, одним выводом отображающего функцию "быстро" светоизлучающего диода D7 и одним выводом отображающего функцию "пожарная тревога" светоизлучающего диода D12. Транзистор TR5 соединен своим коллектором с одним выводом отображающего функцию "монитор" светоизлучающего диода D1, одним выводом отображающего функцию "наблюдение за вором или посторонним" светоизлучающего диода D11.
Более того, кольцевой счетчик CT1 соединен своими выходными выводами Q5 по Q9 по отдельности с соответственными клавишами клавиатуры 31 через предотвращающие обратный ток диоды D14 по D18. Более конкретно, кольцевой счетчик CT1 соединен своим выходным выводом Q5 с одним выводом клавиши функции "задержка" S1 и одним выводом клавиши "блокировка" S6 и соединен своим выходным выводом D6 с одним выводом клавиши функции "временная секретная кодовая идентификация" S2 и одним выводом клавиши функции "странствование" 57. Счетчик CT1 соединен своим выходным выводом Q7 с одним выводом клавиши функции "идентификация" S3, способной принимать состояния, соответствующие функциям. "Питание ВКЛ/ВЫКЛ", "Ввод секретного кода" и "Цифровой ввод", и одним выводом клавиши функции "охрана" S8. Он также соединен выходным выводом Q8 с одним выводом клавиши функции "тревога" S4 и одним выводом клавиши функции "быстро" S9. Счетчик CT1 соединен своим выводом Q9 с одним выводом клавиши "монитор" S5 и одним выводом клавиши функции "медленно" S10.
Дополнительно, выбирающая функцию клавиша KEY1 (не изображена), которая входит в состав робот-системы, соединена с другими выводами функциональных клавиш S5, S4, S3, S2, S1 и S6 и с другими выводами светоизлучающих диодов D1, D2, D3, D4 и D5 через инвертор IN6 и резистор R6. Выбирающая функцию клавиша КЕУ2 соединена с другими выводами функциональных клавиш S10, S9, S8 и S7 и другими выводами светоизлучающих диодов Q6, Q7, Q8, Q9 и Q10 через инвертор IN7 и резистор R7. Дополнительно, выбирающая функцию клавиша KEY3 соединена с другими выводами светоизлучающих диодов D11, D12 и D13 через соединенные по схеме Дарлингтона транзисторы TR6 и TR7 через резистор R9 и с одним выводом резистора R10, другой вывод которого соединен с выходным выводом Q0 счетчика CT1. Вследствие этого, если пользователь выбирает любую одну из выбирающих функцию клавиш KEY1 и KEY3, то выбранная выбирающая функцию клавиша должна быть нажата и быть заземленной заданный отрезок времени. Таким образом на функциональную клавишу и дисплейный светоизлучающий диод, соединенные с выбранной выбирающей функцию клавишей, соответственно может быть подано питание. При наличии конфигурации, описанной выше, поскольку определенные функциональные клавиши и дисплейные светоизлучающие диоды приводятся в действие путем выбора выбирающей функцию клавиши KEY1, KEY2 и KEY3, весьма просто сконструировать клавиатуру 31 и дисплей.
В клавиатуре 31 и дисплее 42 настоящего изобретения, сконструированных, как описано выше, если тактовый сигнал подается микрокомпьютером 30 на тактовый входной вывод счетчика CT1 через "тактовый вывод KEY0" счетчик CT1 формирует последовательно сдвинутые выходные сигналы на основе тактового сигнала. В этих условиях, если нажаты избирательно выбирающая функцию клавиша KEY1 и функциональная клавиша 6, чтобы выбрать функцию "монитор" сигнал высокого уровня подается на входной вывод Pa1 микрокомпьютера 30 на время соединения функциональной клавиши S5. Микрокомпьютер 30 узнает, что была выбрана функция "монитор", и выполняет управление, обеспечивающее выполнение функции "контроль" робот-системы. Когда функциональная клавиша S5 освобождается, сигнал высокого уровня поступает на входной вывод инвертора IN6, и инвертор IN6 выдает сигнал низкого уровня. В это же время сигнал высокого уровня поступает с выходного вывода Q4 кольцевого счетчика CT1 на инвертор IN5 и инвертор IN5 выдает сигнал низкого уровня. В результате этого транзистор TR5 становится проводящим, и начинает светиться отображающий функцию "монитор" светоизлучающий диод D1, обозначая выбор функции "монитор". Аналогично, другие выбирающие функции клавиши и функциональные клавиши выбираются описанным выше образом.
Названные выше функции робот-системы будут описаны ниже. Во-первых, функция "задержка" заставляет следующую выбранную функцию задерживаться на некоторое время, т. е. в том случае, когда была выбрана функция "быстро", "медленно" или "охрана". Функция "монитор" является функцией, которая оповещает пользователя о крике ребенка или для выполнения других функций вызова. Функция "тревога" генерирует звуковой сигнал, когда обнаружено человеческое тело или некоторое препятствие. Функция "странствование" осуществляет перемещение робот-системы без выполнения какой-либо функции. Функция "быстро" заставляет робот-систему перемещаться быстро при поиске, и функция "медленно" заставляет робот-систему перемещаться медленно при поиске. Функция "идентификация" является функцией, способной включить или отключить источник питания, ввести секретный код и позволяющей использовать 10 клавиш для выполнения цифрового ввода. Функция "блокирование" снимает с робота функцию наблюдения и функция "временная идентификация" позволяет ввести временный секретный код в ненормальном состоянии робот-системы для выполнения желаемой функции. Наконец, функция "охрана" является стандартом, устанавливаемым для выполнения функции-слежения, когда робот-система является неподвижной.
Робот, соответствующий настоящему изобретению, оснащен рабочей системой для наблюдения и поиска места, требующего охраны, патрулируя охраняемую область, используя питание, поступающее от рабочей системы. Рабочая система имеет приводное средство для передвижения устройства, причем приводное средство содержит приводной элемент, который соединен с приводным двигателем через регулирующий скорость элемент и свободно вращается в прямом и обратном направлениях.
Приводной элемент может изменять направление своего движения с помощью рулевого средства.
Рулевое средство имеет вращающийся дисковый элемент, несущий приводное средство, и вращающийся дисковый элемент расположен в нижней части устройства, чтобы иметь возможность свободно вращаться в правом и левом направлениях, при этом он соединен таким образом, что перемещается с помощью рулевого двигателя и регулирующего скорость элемента. Рулевое средство выполнено так, чтобы его рулевая функция выполнялась посредством, по меньшей мере, одного или более управляющих рулением элементов, и поэтому робот свободно перемещается внутри охраняемого пространства для патрулирования и обыска определенной площади.
Ниже описан предпочтительный вариант осуществления со ссылками на приложенные чертежи.
На фиг. 4(a) изображен робот, оснащенный рабочей системой, соответствующей настоящему изобретению, причем робот имеет корпус 8 полусферической формы.
Корпус 8 имеет нижний плоский элемент "И, представляющий круглую плиту, и верхний элемент 12, собранный в виде разъемного узла на нижнем плоском элементе 11.
Корпус 8 содержит по меньшей мере один или более чувствительных средств для обнаружения или поиска вора-взломщика (постороннего человека), утечки газа или источника звука и один или более микрокомпьютеров (описанных выше), которые принимают сигналы от датчиков и создают тревожный сигнал. Микрокомпьютер также принимает сигналы, поступающие от обнаруживающего препятствия средства (навигационного блока), которое располагается в передней и задней частях робота, позволяя роботу объезжать препятствия.
Фиг. 4(a) иллюстрирует вариант осуществления механизма, способного выполнять роль приводной рабочей системы. Приводная рабочая система подробно изображена на фиг. 4(b) и фиг. 4(c) и содержит приводное средство 200, рулевое средство 201 и управляющий рулением элемент 202.
Приводное средство 200 имеет двигатель привода 210 и приводной элемент 220 роликовой формы, между которыми расположен регулирующий скорость элемент 230, посредством которого мощность приводного двигателя на пониженной скорости передается приводному элементу 220.
Приводное средство 200 установлено на рулевом средстве 201, которое будет описано ниже, и приводной элемент 23,0 смонтирован за одно целое с валом 221, который смонтирован поперечно на рулевом средстве 201. Верх приводного элемента 220 закрыт крышкой 240 и приводное средство закреплено фиксирующим элементом 250 в верхней части боковой поверхности крышки 240. Приводной двигатель смонтирован так, что слегка наклонен с определенным градиентом.
Регулирующий скорость элемент 230 имеет червяк 231, расположенный на стороне двигателя привода, червячную шестерню 232 и цилиндрическое прямозубое колесо 233, которые понижают скорость двигателя привода на заданный коэффициент.
Червячная шестерня 232 также смонтирована с возможностью вращения на валу 260, который поперечно смонтирован между крышкой 240 и фиксирующим элементом 250, и цилиндрическое прямозубое колесо 233 сцеплено с названной червячной шестерней 232 и смонтировано за одно целое на валу 221, который скреплен с приводным элементом 220.
С другой стороны, рулевое средство 201 имеет вращающийся дисковый элемент 270 в форме круглой пластины, несущий приводное средство 200. Вращающийся дисковый элемент 270 вставлен с нижней стороны плоского элемента 11. Роликоподшипниковые элементы 286 размещены между вращающимся дисковым элементом 270 и нижним плоским элементом 11, чтобы обеспечивалось свободное вращение вращающегося дискового элемента 270.
На вращающемся дисковом элементе 270 имеется периферийная часть 271, направленная вверх, причем периферийная часть проходит через нижний плоский элемент 11 и входит внутрь корпуса 8. Солнце-шестерня 272 кольцевой формы вложена с наружной стороны верхнего конца периферийной части 271. Солнце-шестерня 272 служит базой для установки и удержания вращающегося дискового элемента 270 на нижнем элементе 11 и взаимодействует с регулирующим скорость элементом 290 и рулевым двигателем 280, который вращается в прямом или обратном направлении в соответствии с сигналом от управляющего рулением элемента 202.
Рулевой двигатель 280 закреплен элементом 260 в подходящем месте вне окружности вращающегося дискового элемента 270 на возможно большем расстоянии от вращающегося дискового элемента. Регулирующий скорость элемент 290 имеет червяк 291, установленный на валу рулевого двигателя 280, и червячную шестерню 292, сцепленную с червяком 291. Червячная шестерня 292 закреплена с возможностью вращения на валу 300, который установлен вертикально между нижним плоским элементом 11 и элементом 260.
Червячная шестерня 292 сцеплена с солнцем-шестерней 272 вращающегося дискового элемента 270 для передачи приводной мощности от рулевого двигателя на вращающийся дисковый элемент.
Управляющий рулением элемент 202 имеет магнитный элемент 215, закрепленный в подходящей позиции шестерни 272 вращающегося дискового элемента 270, и по меньшей мере, три или более определяющих направление руления датчика 251. Магнитный элемент 215 фиксирован в направлении, перпендикулярном к шестерне 272, и датчики направления руления 251 закреплены вокруг шестерни 272 так, чтобы сохранялся одинаковый зазор с корпусом 8, и расположены спереди и справа и слева корпуса 8.
Работа ниже описана со ссылками на фиг. 4b и фиг. 4c.
После подачи пускового сигнала микрокомпьютер 10, расположенный внутри корпуса 8, получает первоначальный пусковой сигнал, и одновременно с этим микрокомпьютер 10 запускает двигатель 210 привода, приводная мощность названного двигателя привода передается на приводной элемент 220 через регулирующий скорость элемент 230, чтобы привести в движение корпус 8. В этот момент работа будет происходить в направлении движения вперед. Также, в этот момент направление приводного элемента 220 остается неизменным, т.е. в позиции, которая осталась от предшествующего состояния останова.
Когда робот получит сигнал о направлении на препятствие от обнаруживающего чувствительного препятствия средства 60 во время движения в прямом направлении, микрокомпьютер 10 принимает этот сигнал обнаружения и в то же время выдает сигнал привода на рулевой двигатель 280 рулевого средства 201, тем самым выполняя руление. Направление выбирается так, чтобы избежать обнаруженное препятствие.
Более подробно, микрокомпьютер 10 выбирает ту сторону, с которой препятствие не обнаружено, когда препятствие обнаружено в одном направлении, и заставляет рулевой двигатель 280 повернуться в названном выбранном направлении. В то же время вращающийся дисковый элемент 270 поворачивается в нужном направлении.
Когда вращающийся дисковый элемент 270 поворачивается на заданный угол для достижения заданного направления, управляющий рулением элемент 202 определяет состояние руления и завершает операцию руления рулевого двигателя 280 в соответствии с сигналом обнаружения, тем самым выруливая корпус 8 на заданное направление. Следовательно, робот способен непрерывно патрулировать по охраняемой площади.
Ниже описана схема возбуждения рабочего устройства. На фиг. 5(a) изображена схема запуска двигателя, соответствующая настоящему изобретению, которая имеет управляющий прямым вращением двигателя узел 1 для вращения двигателя в прямом направлении, управляющий обратным вращением двигателя узел 2 для вращения двигателя в обратном направлении и устанавливающий направление вращения узел 3 для выбора направления вращения двигателя.
Управляющий прямым вращением двигателя узел 1 включает в себя первый транзистор TR11, база которого принимает управляющий прямым вращением двигателя сигнал с выходного вывода MTRF микрокомпьютера 10 и эмиттер которого заземлен. Второй и третий транзисторы TR9 и TR10 базами соединены с коллектором транзистора TR11 через резистор R10 и эмиттерами соединены с источником питания 24В.
Управляющий обратным вращением двигателя узел 2 включает в себя четвертый транзистор TR3, коллектор которого принимает управляющий обратным вращением двигателя сигнал с выходного вывода MTRR микрокомпьютера 10 и база которого соединена с выходным выводом MTRF, пятый транзистор TR2, соединенный базой с коллектором транзистора TR3 и эмиттером соединенный с эмиттером транзистора TR3 и шестой и седьмой транзисторы TR1 и TR4, базы которых соединены с коллектором транзистора TR2 и эмиттеры которых соединены с источником питания 24В.
Устанавливающий направление вращения узел 3 включает в себя первый полевой транзистор MT1, затвор которого, соединенный с его истоком через резистор R6, соединен с коллектором транзистора TR4, второй полевой транзистор MT2, затвор которого соединен с коллекторной стороной транзистора TR10, сток которого соединен с истоком полевого транзистора MT1 и исток которого заземлен, первую индуктивную катушку L1, один конец которой соединен с общей точкой истока и стока первого и второго полевых транзисторов MT1 и MT2 и второй конец которой соединен с клеммой "-" двигателя, тем самым задерживается нарастание скорости вращения двигателя, третий полевой транзистор MT3, затвор которого соединен с его истоком через посредство резистора R7 и соединен с коллекторной стороной транзистора TR9, четвертый полевой транзистор, сток которого соединен с истоком полевого транзистора MT3, затвор соединен с коллекторной стороной транзистора TR1 и исток заземлен, и вторую индуктивную катушку L2, один вывод которой соединен с общей точкой стока и истока третьего и четвертого полевых транзисторов MT3 и MT4 и другой вывод соединен с клеммой "+" двигателя.
При такой конструкции, когда робот-система движется вперед и выполняет функцию наблюдения или "странствования", выходной сигнал высокого уровня подается с выходного вывода MTRF микрокомпьютера 10 на транзисторы TR3 и TR11, в результате чего эти транзисторы становятся проводящими. Соответственно, потенциал баз транзисторов TR9 и TR10 уменьшается, что делает транзисторы TR9 и TR10 проводящими. В результате полевой транзистор MT3, соединенный с коллекторной стороной транзистора TR9, становится проводящим и полевой транзистор MT2 также становится проводящим. Поэтому течет ток по цепи, образованной из следующих элементов: источник 24В (ВАТ) - полевой транзистор MT3-индуктивная катушка L2 - клемма "+" двигателя - индуктивная катушка L1 - полевой транзистор MT2-земля. Поэтому двигатель вращается в прямом направлении, а система движется вперед. В этом случае скорость движения в прямом направлении контролируется по выходному току индуктивной катушки L1. в случае, когда двигатель включается и отключается импульсами для регулирования скорости, на интервале отключения аналоговое значение на порту MTRS (датчик двигателя) будет обратно пропорционально скорости двигателя.
Если при движении вперед ультразвуковой датчик обнаружит препятствие, сигнал высокого уровня подается с выходного вывода "управление обратным вращением" MTRR микрокомпьютера 10 на транзистор TR2, после чего транзистор TR2 становится проводящим и транзисторы TR1 и TR4 также становятся проводящими. Поэтому полевой транзистор MT1 становится проводящим и полевой транзистор MT3 4 также становится проводящим. В результате этого ток течет через токовую цепь, образованную следующими элементами: источник питания - полевой транзистор MT1-индуктивная катушка L1-клемма "-" двигателя - полевой транзистор MT4 - индуктивная катушка L2-земля, что заставляет двигатель вращаться в обратном направлении, а робот-систему двигаться назад.
Далее управляющая изменением направления схема для изменения направления движения робот-системы описана подробно ниже со ссылками на фиг. 5(b).
Как показано на фиг. 5(b), управляющая изменением направления схема имеет изменяющий правое направление узел 1, который содержит переключающий транзистор TR12, коллектор которого соединен с выходным выводом "сигнал изменения правого направления" MR микрокомпьютера 10, и база которого соединена с выходным выводом "сигнал изменения левого направления" ML, первый транзистор TR13, база которого соединена с коллекторной стороной транзистора TR12 и эмиттер которого соединен с землей, и второй транзистор TR14, база которого соединена с общей точкой резисторов R15 и R16, соединенных с коллектором транзистора TR13, и эмиттер которого соединен с источником питания 24В, изменяющий левое направление узел 2, который содержит третий транзистор TR20, база которого соединена с выходным выводом "сигнал изменения левого направления" ML микрокомпьютера 10 и эмиттер которого соединен с землей, и четвертый транзистор TR17, база которого соединена с общей точкой резисторов R24 и R21, соединенных с коллектором транзистора TR20, и эмиттер которого соединен с источником питания, и устанавливающий направление узел 3, который содержит первый полевой транзистор M16, затвор которого соединен с его истоком через резистор R20 и с коллектором транзистора TR14 через резистор R18, а сток соединен с источником питания 24В в позиции ВАТ. Второй полевой транзистор M18 имеет затвор, соединенный с его истоком через резистор R25 и соединенный с коллектором транзистора TR17 через резистор R24, и сток, соединенный с источником питания 24В, у каждого третьего и четвертого полевых транзисторов MT5 и M17 затвор соединен с коллектором транзистора TR14 и TR17 соответственно, сток соединен с истоками полевых транзисторов M16 и M18 и исток соединен с землей, соответственно, индуктивная катушка L5 одним концом соединена с истоковой стороной полевого транзистора M16 и другим концом соединена с положительной клеммой "+" двигателя, и индуктивная катушка L6 соединена одним концом с истоком полевого транзистора MT18 и другим концом соединена с отрицательной клеммой "-" двигателя.
При такой конструкции, если в ходе работы робот-системы будет обнаружено препятствие, выходной сигнал подается с выходного вывода правого/левого направления изменения управляющего сигнала ML или MR микрокомпьютера 10. Если на выходном выводе ML появляется сигнал высокого уровня, означающий наличие препятствия справа, транзистор TR12 становится проводящим и транзистор TR20 также становится проводящим. В результате этого потенциал транзистора TR17 падает, что делает этот транзистор проводящим, и поэтому полевые транзисторы MT15 и MT18 также становятся проводящими. Поэтому течет ток по токовой цепи, образованной следующими элементами: батарея (ВАТ) 24В - полевой транзистор M18 - индуктивная катушка L6-клемма "-" двигателя-индуктивная катушка L5-полевой транзистор M15. Поэтому двигатель вращается так, что робот-система поворачивается влево.
В противном случае, если на выходном выводе MR появляется сигнал высокого уровня, означающий наличие препятствия слева, транзистор TR13 становится проводящим и затем транзистор TR14 становится проводящим, что делает также проводящими полевые транзисторы M16 и M17. В результате течет ток по токовой цепи, образованной следующими элементами: батарея (ВАТ) 24В-полевой транзистор M16 - индуктивная катушка L5-клемма "+" двигателя - индуктивная катушка L6-полевой транзистор M17, что заставляет двигатель вращаться в обратном направлении, поворачивая робот-систему вправо.
Далее, ниже описано средство обнаружения поврежденной поверхности, смонтированное на нижнем плоском элементе 11 робота, предназначенное предотвращать робот от перевертывания (опрокидывания) на неровном участке поверхности движения.
Средство обнаружения для достижения названной выше цели, представленное фиг. 6, имеет шары, размещенные в правой и левой передних частях подвижного робота. Имеются рычаги, у каждого из которых на одном конце шар и на другом конце магнит. Имеется датчик, определяющий состояние поверхности качения по локальным изменениям любого из двух шаров. Правостороннее средство обнаружения поверхности оценивает состояние правосторонней поверхности на основании состояния поверхности, - контролируемого правосторонним датчиком, и левостороннее средство обнаружения поверхности оценивает состояние левосторонней поверхности на основании контроля левостороннего датчика. Рычаги закреплены на нижнем плоском элементе 11 корпуса 8 шарнирными осями 311 соответственно, и датчики закреплены на нижнем плоском элементе 11 и обращены к магниту, который закреплен на другом конце рычага.
Ниже дано описание предпочтительного варианта осуществления средства обнаружения поврежденной поверхности, которое ведется со ссылками на приложенные чертежи.
Фиг. 6(a), (b), (c) и (d) являются структурными чертежами, схематично представляющими средство обнаружения поврежденной поверхности подвижного робота, соответствующее настоящему изобретению. Фиг. 6(a) и (b) показывает рабочее состояние средства. Фиг. 7(a) является схемой возбуждения средства, и фиг. 7(b) является блок-схемой, иллюстрирующей последовательность операций.
Как показывают фиг. 6(a), (b), (c) и (d) на нижнем плоском элементе 11 робота, имеющего по существу круглую форму, расположены два ведущих колеса 310 симметрично относительно центра плоского элемента. Два рычага 320 размещены на нижнем плоском элементе 11 между двумя ведущими колесами 310, имеющие возможность перемещаться вверх-вниз. Каждый рычаг 320 изогнут в средней части под определенным углом, и шарнирные оси 311 закреплены с обоих концов на торцах согнутых частей. На переднем конце рычага 320 закреплен с возможностью вращения шар 330, диаметр которого по существу равен ширине каждой из названных шарнирных осей 311. Поэтому, когда подвижный робот передвигается в направлении, обозначенном стрелкой A, когда он достигает ступенчатого участка или перепада пола, по меньшей мере, один из правого и левого шаров 330 опускается, в результате чего ступенчатый участок или пониженный участок поверхности обнаруживает ячейка элемента Холла, которая описана ниже. Робот движется назад некоторое время под управлением микрокомпьютера 10, поворачивается на 90o влево или вправо, а затем ведет себя так, как если бы исполнял обычную работу.
Ниже будет описана механическая работа средства обнаружения поврежденной поверхности подвижного робота, соответствующего настоящему изобретению со ссылкой на фиг. с 6(a) по 6(f).
Как показывают фиг. 6(e) и (f), каждый, из датчиков перепада 46, 47 имеет постоянный магнит 341 плоской формы с северным и южным полюсами и ячейку элемента Холла 343, имеющую кристалл элемента Холла 342, который может быть помещен на горизонтальную ось постоянного магнита 341.
Постоянный магнит 341 изготовлен так, что концевая часть рычага 320 с постоянным магнитом приближается к и удаляется от кристалла элемента Холла 342 в соответствии с поведением шара 330, закрепленного на другом конце рычага 320, как показано на фиг. 6 (f), и передвигается согласованно с движением подвижного робота, поэтому ступенчатый участок или пониженный участок площади несущей поверхности может быть обнаружен по электрическому сигналу, генерируемому кристаллом элемента Холла 342. Другими словами, как видно на фиг. 6(f), когда подвижный робот, соответствующий настоящему изобретению, нормально передвигается вперед по плоской поверхности, левосторонний шар 330 и рычаг 320 сохраняют свои положения, обозначенные жирной линией. Однако, когда ступенька или перепад обнаружится на левой стороне поверхности движения, левосторонний шар 330 опускается у ступеньки или перепада, в результате чего позиция левосторонних шара 330 и рычага 320 изменяется на ту, которая изображена пунктирной линией.
У ступеньки или перепада источник магнитного поля (постоянный магнит 341, закрепленный на верхнем конце рычага) приближается к ячейке элемента Холла 343, закрепленной на кронштейне 344, и изменение напряженности поля обнаруживает ячейка элемента Холла 343, после чего движение вперед робота прекращается. Следующей операцией (возвратом робота) управляет микрокомпьютер 10, как это описано ниже.
Фиг. 7(a) представляет схему возбуждения средства обнаружения поврежденной поверхности. Она содержит источник питания 350, который использует перезаряжаемую батарею 351 и имеет переключатель источника питания 352. Микрокомпьютер 10 получает питание от источника питания и управляет нормальной работой подвижного робота, а также выполняет программу по обнаружению поврежденной поверхности. Рулевой привод 201 (фиг. 4(b)) изменяет направление движения подвижного робота под управлением микрокомпьютера 10, приводное средство для перемещения в прямом или обратном направлениях 200 передвигает подвижный робот вперед или назад в соответствии с программой микрокомпьютера 10. Правосторонняя обнаруживающая повреждение поверхности секция 354 обнаруживает плохое состояние (ступеньки, и т.д.) правой стороны под управлением названного микрокомпьютера 10, и левосторонняя обнаруживающая повреждения поверхности секция 355 обнаруживает состояние поверхности с левой стороны под управлением микрокомпьютера 10.
Если средство обнаружения повреждения поверхности изготовлено таким образом, когда впервые переключатель питания 352 питающего средства 350 устанавливают в позицию " Включено", чтобы привести в действие подвижный робот, постоянный ток от источника питания Vcc поступает на подвижный робот, после чего подвижный робот работает по нормальной рабочей программе, предварительно введенной в микрокомпьютер 10. Когда подвижный робот достигает место с плохой поверхностью с левой стороны движения робота, шар 330, закрепленный спереди на левой стороне робота, падает под действием собственного веса ниже своего обычного горизонтального уровня.
В этот момент рычаг 320, скрепленный с левосторонним шаром 330, смещается, в результате чего постоянный магнит 341, закрепленный на этом рычаге, приближается к ячейке элемента 343, соединенной с регулятором напряжения 345, и ячейка Холла проводит ток, пропорциональный напряженности магнитного поля.
Когда магнитное поле, направленное перпендикулярно к поверхности кристалла Холла 342, усиливается настолько, что оказывается превышенной рабочая точка, ток, наводимый в элементе Холла, подается от триггера Шмитта 347 через сигнальный усилитель 346, который включает выходной транзистор 348. При этом сигнал L (низкого) уровня поступает на входной порт b микрокомпьютера 10. Затем микрокомпьютер 10 оценивает плохое состояние поверхности с левой стороны подвижного робота и подает сигнал на порт "a", который приводит в действие секцию 44a, управляющую прямым и обратным движением, что влечет передвижение подвижного робота назад на заданное расстояние.
Далее, поскольку микрокомпьютер 10 сделал заключение, что опасным направлением для робота является левое, он подает управляющий сигнал на управляющую рулением секцию 45a через порты "c" и "d", чтобы заставить рулевой двигатель повернуться вправо на 90o.
Когда подвижный робот достигает места, которое опасно и находится с правой стороны во время работы, правосторонний шар падает под действием собственного веса.
Точно так, как и при работе левосторонней обнаруживающей повреждения поверхности секции 355, когда напряженность магнитного поля, перпендикулярного поверхности кристалла Холла 342, превысит рабочую точку, ток, наводимый в элементе Холла 343, течет от триггера Шмитта 347 через сигнальный усилитель 346, включает выходной транзистор 348 и направляет сигнал L (низкого) уровня на входной порт "a" микрокомпьютера 10. Микрокомпьютер 10 оценивает плохое состояние поверхности с правой стороны и подает сигнал на порт "e" для приведения в действие секции 440, управляющей прямым и обратным движением для отвода назад подвижного робота на заданное расстояние. Далее, поскольку микрокомпьютер 10 уже определил, что опасное направление находится справа, он подает управляющий сигнал на управляющую рулением секцию 45a через порты "с" и "d", чтобы повернуть рулевой двигатель 45 влево на 90o.
Если состояние поверхности справа и слева хорошее, то средства обнаружения бездействуют, а робот нормально работает.
Фиг. 7(b) является блок-схемой, иллюстрирующей последовательность операций средства обнаружения поврежденной поверхности подвижного робота, соответствующего настоящему изобретению. Когда выключатель источника питания 352 источника питания 350 ставят в первый раз в позицию "Включено" при операции S1, начинает протекать постоянный ток, приводящий в действие подвижный робот. При операции S 2 он начинает двигаться в соответствии с программой нормальной работы, предварительно введенной в микрокомпьютер 10.
Затем при операции S3, когда шар 330, закрепленный спереди на правой или левой стороне падает, положение постоянного магнита 341, закрепленного на верхнем конце рычага 320, изменяется в направлении к ячейке элемента Холла 343, и изменение напряженности магнитного поля обнаруживается ячейкой элемента Холла 343 и усиливается до заданного значения сигнальным усилителем 346. Когда этот сигнал проходит через триггер Шмитта 347 и включает выходной транзистор 348, сигнал L (низкого) уровня поступает на микрокомпьютер 10 через порт "a" (или "b"). Выполняется переход к операции S4, на которой подвижный робот движется назад на заданное расстояние в соответствии с программой, введенной в микрокомпьютер 10. При операции S5 подвижный робот движется после того, как микрокомпьютер 10 определит, где находится плохая поверхность: спереди (оба шара упали) или слева или справа от подвижного робота. Если плохая поверхность слева, выполняется переход к операции S6, на которой микрокомпьютер, после возврата робота на короткое расстояние, подает рабочий сигнал на управляющую рулением секцию 45a через порты "c" и "d" и поворачивает рулевой двигатель 45 на прямой угол для предотвращения подвижного робота от падения вниз, а затем выполняется переход, к операции S2. Если микрокомпьютер 10 решит, что плохая поверхность находится с правой стороны от подвижного робота, выполняется переход к операции S7, на которой микрокомпьютер 10 подает управляющий сигнал на управляющую рулением секцию 45a через порты "c" и "d", чтобы рулевой двигатель 45 повернулся влево на 90o после отвода назад на короткое расстояние. Выполняется возврат операции S2, и возобновляется нормальная работа.
Если плохая поверхность находится впереди подвижного робота (оба шара упали) и подвижный робот следует вернуть назад, микрокомпьютер подает сигнал "движение" на секцию 44a, управляющую прямым и обратным движением, через порт "a" для движения подвижного робота назад. Робот может просто развернуться в этом случае.
В случае, когда при операции S3 обнаруживается хорошая поверхность, т.е. когда при операции S3 получен ответ НЕТ, сигнал высокого уровня поступает на порты "a" и "b" микрокомпьютера через выходной транзистор 348 право- и левосторонних секций 344 и 345, обнаруживающих поврежденную поверхность, и выполняется возврат к операции S2, и робот движется по рабочей программе, предварительно введенной в микрокомпьютер 10.
Таким образом, при наличии предотвращающего падение подвижного робота, соответствующего настоящему изобретению, чтобы предотвратить падение значения напряженности в ячейке элемента Холла, которое изменяется в функции изменения положения постоянного магнита, закрепленного в верхней части шарово-рычажного узла, оно оценивается микрокомпьютером 10, благодаря чему может быть обнаружена плохая поверхность впереди, справа или слева от подвижного робота, что обеспечивает безопасность работы подвижного робота.
Ниже подробно описаны навигационная система 60 и способ обнаружения препятствий посредством ультразвуковых волн.
В соответствии с настоящим изобретением ультразвуковая энергия излучается в определенном секторе обзора одиночным преобразователем для целей обнаружения удаленных объектов по принципу измерения эхо-сигнала. Мощный короткий импульс звуковой энергии излучается в определенном изменяемом направлении преобразователем, который затем воспринимает эхо-сигнал, отраженный от цели в секторе обзора, для определения расстояния, направления и природы таким образом обнаруженного объекта. Такие отраженные сигналы принимает одиночный преобразователь во время своего разворачивающего перемещения от нулевой позиции на платформе против центрирующего смещения пружинами, которые также служат проводниками тока импульсных сигналов между преобразователем и приемопередающей схемой. Электромагнитный разворачивающий привод придает колебательное движение преобразователю для перемещения его внутри сектора разворота с углом менее 360o в соответствии с одним вариантом осуществления силами магнитного происхождения, изменяемыми в соответствии с нагрузкой электромагнитного разворачивающего привода в нулевом положении преобразователя и в граничных положениях угла разворота, определяемом датчиком положения, связанным с электромагнитным разворачивающим приводом. Такое изменение смещающих сил выполняется под программным управлением с целью сохранения относительно постоянного угла разворота, в котором смещается преобразователь, в соответствующей временной зависимости от подачи импульсов на преобразователь с помощью приемопередающего средства для ультразвукового излучения.
Рассматривая внимательно приложенные чертежи, можно заметить, что фиг. 8(a) иллюстрирует электроакустический преобразователь, обозначенный цифровой позицией 64, который включает в себя трубчатый корпус, обозначенный цифровой позицией 512, изготовленный, предпочтительно, из пластмассового материала и приспособленный для установки на платформу, с которой соединена навигационная система.
Задний конец корпусного узла закрыт закрывающим элементом 524, входящим в корпусной узел между плоской стеночной частью 520 и трубчатой или цилиндрической частью 526 корпусного узла. Штепсельный разъем 528 крепится закрывающим элементом, через который проходят электрические соединения между преобразовательным узлом 510 и его управляющей системой, как подробно описано ниже.
Пара часового типа подшипниковых элементов 540 крепится резьбой в трубчатом корпусе соосно друг с другом для образования оси вращения, перпендикулярной продольной оси трубчатого корпуса 512. Установленные на подшипниках оси вращения 542 связаны с цилиндрической опорой преобразователя 532 подшипниковым соединением с подшипниковыми элементами 540, как иллюстрирует фиг. 8(b), чтобы допускалось свободное от трения угловое движение преобразовательного элемента 536 относительно оси вращения, образованной подшипниковыми элементами 540.
Как изображено на фиг. 8(a) и фиг. 8(b), каждая из втулочных частей подшипниковых элементов 542 крепит концевые части 544 пары противоположно свернутых спиральных пружин 546, которые центрируют детектор в точке, обеспечивающей направление вперед. Спиральные пружины, которые изготовлены из электропроводящего материала, подобного стали, закреплены концами 548 на трубчатом корпусе посредством контактных винтов 550 и электрически соединены с разъемами 552. Контактные винты 550 прочно ввинчены в перегородку 554, которая разделяет внутренность трубчатого корпуса 512 на переднюю камеру, содержащую преобразовательный элемент 536 в его опоре 532, и заднюю камеру, содержащую электромагнитный разворачивающий привод, обозначенный цифровой позицией 556.
Разворачивающий привод 556, изображенный на фиг. 8(b), содержит электромагнитную катушку 558 (позиция 63 на фиг. 2(a)), установленную внутри кольцевого пространства, образованного внутренним трубчатым сердечником 560 и внешним цилиндрическим корпусом 562, выступающим вдоль оси из монтажной перегородки. Противоположные выводы электромагнитной катушки 558 соединены клеммами 564 и 566 с изолированными сигнальными проводниками 568 и 570, которые идут на электрический штепсельный разъем 528. Электрический ток подается на электромагнитную катушку 558 через проводники 568 и 570 для магнитного возбуждения катушки разворачивающегося привода 556 электрическим током. Ток в одном направлении будет наводить противодействующую магнитную силу, приложенную к создающему магнитный поток торцу (полюсу) 572 постоянного магнита 574, развивая толкающую силу, действующую на преобразователь 536 в направлении, противоположном направлению движения часовой стрелки, например, как видно на фиг. 8(b), вызывая смещение от торца катушки. Магнит 574 немного смещен относительно катушки против часовой стрелки в исходном состоянии покоя. Смещение полюсного наконечника 572 относительно оси катушки 558 в нулевом положении гарантирует такое смещение против часовой стрелки и позволяет системе, обрабатывающей данные, описанной ниже, правильно предсказывать и определять направление смещения преобразователя.
Устройство, представленное рис. 8(b), также устанавливает электрические связи между преобразовательным элементом 536 и изолированными электрическими проводниками 576 и 578, соединенными с клеммными винтами 650, с которыми соединены спиральные пружинные элементы 546, о чем сказано выше. Электрические проводники 576 и 578 также входят в штепсельный разъем 528, через который проходят электрические импульсы на преобразовательный элемент для излучения им ультразвуковой энергии и через который отраженные сигналы преобразуются в сигналы электрической энергии, проходящие на систему управления, с которой соединен преобразовательный узел 510, который ниже описан подробно.
Как видно, на фиг. 9(a) преобразовательный узел 510 изображен соединенным через штепсельный разъем 528 с названной выше системой управления, обозначенной цифровой позицией 580. Преобразовательный элемент 536 получает импульсы тока через систему управления, поступающие по названному выше проводнику 576, чтобы излучать ультразвуковую энергию в направлении, обозначенном вектором 582, внутри зоны обзора, обозначенной огибающей 584. В соответствии с одним вариантом изобретения сектор зоны обнаружения устанавливается в течение запросного цикла приблизительно 11,36 миллисекунды, за время которого любой объект или цель отразит ультразвуковую энергию, которую принимает преобразователь, и преобразует ее в электрическую энергию, передаваемую по проводнику 576 на систему управления 580. Дополнительно, в соответствии с таким вариантом осуществления настоящего изобретения сектор обнаружения 584 устанавливает расстояние обнаружения 586 от своей оси вращения 588 вплоть до семи футов, которое сохраняется по существу постоянным в течение каждого ультразвукового запросного цикла. Далее, сектор обнаружения 584, изображенный на фиг. 9(a) имеет максимальный размер приблизительно 20 градусов.
Как можно заметить дополнительно на фиг. 9(a), преобразовательный элемент 536 этого варианта осуществления разворачивается в зоне обнаружения, которая значительно больше той, которую охватывает одиночный сектор обнаружения 584, путем колебательного смещения преобразовательного элемента 536 вокруг его оси вращения 588 на угол разворота менее 360 градусов, скажем 180 градусов, как проиллюстрировано. Такое разворачивающее движение преобразователя обусловлено угловым смещением в противоположных направлениях на 90 градусов от нулевого положения, изображенного на фиг. 8 (a) и 9 (a), в ответ на пульсацию электромагнитной катушки 558 привода 556, описанную выше. Электрические возбуждающие импульсы, поступающие на катушку 558, изменяются по величине и длительности для достижения и сохранения необходимых рабочих зависимостей между излучением и положением в ответ на обнаружение нулевого положения преобразователя и пределов его угла разворота, ограничиваемого резиновыми стопорными элементами 30. Работа в импульсном режиме преобразовательного элемента 536, принуждающая его излучать ультразвуковую энергию, достигается через проводник 576, электропроводные центрирующие пружинные элементы 546 и импульсный возбудитель 592 в приемопередающей схеме 102 под управлением сигналов, создающих импульсы, и вентильных сигналов, поступающих на него от сигнальных выходных портов 594 и 596 микрокомпьютера 598. Отраженные сигналы, снимаемые с преобразовательного элемента, являющиеся результатом отражения от объектов, находящихся в зоне обнаружения, передаются по спиральным пружинным элементам 546 и проводнику 576 на малошумящий усилитель 100 в приемопередающей схеме 102. Усиленные отраженные сигналы поступают на детектор отрицательных пиков 104 приемо-передающей схемы, выходной сигнал которой поступает на входной порт 106 микрокомпьютера 598. Сигнальные данные, принятые входным портом 106 микрокомпьютера, используются для анализа целевых объектов, породивших отраженные сигналы, и выполнения других функций по запрограммированным алгоритмам.
Такой анализ отраженных сигналов микрокомпьютером зависит, конечно, от их временной зависимости от импульсов электромагнитной катушки 558 и определения нулевого и предельных положений преобразователя во время его разворачивающего смещения, как сказано выше. Вообще говоря, импульс поступает на катушку 558, которая вызывает движение датчика в направлении, противоположном движению часовой стрелки. У предела поворота в этом направлении датчик сталкивается с резиновым стопором 530 и начинает движение в обратном направлении (по ходу часовой стрелки) под действием пружин 546. Вскоре после прохода магнитом 574 нулевого положения, которое весьма просто определить по его взаимодействию с катушкой 558, катушка вновь получает импульс, чтобы повернуть датчик дальше в направлении часовой стрелки. Отскок и возврат от предела поворота по часовой стрелке выполняются точно так, как и при повороте против часовой стрелки. Как сказано выше, микрокомпьютер следит за длительностью каждого цикла (или полуцикла) и изменяет амплитуду импульса, подаваемого на катушку, и его длительность, чтобы обеспечивалась постоянная длительность цикла. Зная длительность цикла, легко определить правильную длительность излучений, чтобы излучения выполнялись при заданных углах периодически.
В настоящем варианте осуществления смещение преобразователя и определение его положения выполняются посредством разворачивающего привода и чувствительного элемента 110, изображенного на фиг. 9 (а). Элемент 110 содержит восстанавливаемую схему возбуждения 112 и определяющую положение схему 114. Электромагнитная катушка 558 соединена через восстанавливаемую схему возбуждения 112 и названный проводник 568 и с выходным портом "импульсный сигнал" 116 микрокомпьютера. Сигналы о положении преобразователя воспринимает определяющая положение схема 114, которая также соединена с катушкой 558 проводником 568. Определяющая положение схема 114 соединена с входным портом "сигнал положения" 118 микрокомпьютера.
Система управления 580 дополнительно содержит источник питания в виде батареи 120, положительная клемма которого соединена с восстанавливаемой схемой возбуждения 112, импульсным возбудителем 592 и регулятором напряжения 122. Регулятор напряжения 122 создает два разных выходных напряжения: опорное смещающее напряжение 1,8 В на линии 124, идущей на микрокомпьютер, и датчик положения 114, и питающее напряжение +5 В на линии 126, идущей на импульсный возбудитель 592, малошумящий усилитель 100 и детектор отрицательных пиков 104 для его оперативного питания. Линия смещения 124 задает опорный уровень относительно земли для сигналов переменного тока внутри микрокомпьютера 98.
Схема, соединенная с приемопередающей схемой 102, детально изображена на фиг. 9(b). Импульсный возбудитель 592 имеет каскад соединенных по схеме эмиттерного повторителя транзисторов Q3, Q4 и трансформатор T1, включенный между землей и положительной клеммой батареи для подачи усиленного напряжения на преобразовательный элемент 536, как проиллюстрировано, когда сигнал "ультразвуковой импульс" от выходного порта 94 микрокомпьютера поступает через резистор R6 на базу транзистора Q3 для приложения управляющего смещения к базе транзистора Q4.
Когда транзистор Q4 становится проводящим, через первичную обмотку трансформатора T1 течет ток и ультразвуковая волна пропускается, когда усиленное напряжение с вторичной обмотки трансформатора поступает на преобразователь 563 через конденсатор C5. Диод, включенный между первичной обмоткой трансформатора и транзистором Q4, предотвращает транзистор от разрушения обратным напряжением, возникающем на трансформаторе.
Отраженные сигналы, воспринимаемые ультразвуковым преобразователем 536, поступают по проводнику P и через конденсатор C5 на базу транзистора Q5 в малошумящем усилителе 100, настроенном на высокий коэффициент усиления и низкий шум с помощью схемы зеркала тока Q6, Q7, соединенной с коллектором транзистора Q5.
Выходной коллектор транзистора Q8, на который подается смещающее напряжение от источника 5 В через резистор R16, соединен с базой транзистора Q9, настроенного с помощью схемы зеркала тока Q10, Q11, соединенной с коллектором транзистора Q9, на Q приблизительно 20 для малошумящего усилителя 100 при коэффициенте усиления приблизительно 100000 на ультразвуковых частотах. Другими словами, усиленный и отфильтрованный сигнал, снимаемый с коллектора транзистора Q8, поступает на базу транзистора Q9, который соединен со схемой зеркала тока Q10, Q11.
Выход транзистора Q11, образующий часть схемы зеркала тока, соединен своим коллектором с сигнальным входным портом AND (И) микрокомпьютера 98 для аналогово-цифрового преобразования и анализа.
Входящие ультразвуковые отраженные сигналы развертываются микрокомпьютером каждые 460 микросекунд и преобразовываются в расстояние с разрешающей способностью около трех дюймов.
Как можно дополнительно заметить на фиг. 9(b), восстанавливаемая схема возбуждения 112 содержит транзистор Q2, база которого соединена через резистор R3, с выходным портом "импульсное возбуждение" 116 микрокомпьютера. Выходной коллектор транзистора Q2 соединен через резистор R2 с базой силового транзистора Q1, что заставляет его включиться и проводить ток от клеммы батареи на входной вывод катушки 58 по проводнику P2.
Вывод катушки 58 также соединен через последовательно включенные конденсатор C2 и резистор R96 с отрицательным входным выводом операционного усилителя OP1 определяющей положение схемы 114. Положительный опорный вывод усилителя OP1 соединен с линией смещающего напряжения 124. Обратная связь операционного усилителя образована параллельно включенными обратной связи конденсатором C3 и резистором R4 для приема сигналов от катушки 58, выполнять его полосовую фильтрацию и усиливать его в 30 раз. Диод D2, соединяющий проводник P2 от катушки 58 на землю, предотвращает транзистор Q1 драйвера от порчи обратным напряжением при обесточивании катушки.
Ниже подробно описаны со ссылками на приложенные чертежи датчики, размещенные внутри корпуса робота, т.е. размещение излучающего ультразвуковые волны элемента и воспринимающего ультразвуковые волны датчика, воспринимающего инфракрасные лучи датчика и опознающего физический объект датчика.
На фиг. 10(a) изображен предпочтительный вариант осуществления размещения разнообразных датчиков. На фиг. 10(a) показаны установочные положения датчиков, выполненных на нижнем плоском элементе 409 робота, и на фиг. 10(b) показана крепящая датчики решетка 410 для крепления наложением сверху датчика, установленного в установочное положение на нижнем плоском элементе 409.
На фиг. 10(c) электроакустический преобразователь 402 для обнаружения препятствия, находящегося на близком расстоянии, с целью управления приводным средством 200 и рулевым средством 201, установлен в первое установочное положение для датчика 401. Этот датчик может быть выполнен так, как иллюстрирует фиг. 8(a). Ультразвуковой датчик для обнаружения физического объекта, движущегося на большом расстоянии, с целью подачи сигнала тревоги и т. п. , содержит излучающий ультразвуковую волну элемент 404 (фиг. 10(c)) и воспринимающий ультразвуковые волны элемент 405, в котором элементы 404, 405, образующие ультразвуковой датчик, установлены во второе установочное положение 403, а также в ячейки 43, когда используются обращенные назад датчики. Воспринимающий инфракрасные лучи датчик 408 для обнаружения инфракрасных лучей, излучаемых человеком-нарушителем, устанавливается в третьи установочные положения 406, расположенные на интервалах под углом 120o.
Направляющие ребра 408 выполнены на левой и правой боковых стенках установочных положений 401, 403, 406 и первоначальная установка опорной платы, несущей датчик, выполняется вставлением по вертикали вдоль боковых направляющих ребер 408, и после завершения вставления датчика сетка 410, изображенная на фиг. 10(b), крепится к нижнему плоскому элементу 409, чем обеспечивается более жесткое крепление датчика.
Фиг. 10(c) показывает частично переднюю часть корпуса робота 8, на которой виден обнаруживающий физический объект (навигационный) датчик 402, и способ монтажа излучающего ультразвуковые волны элемента и воспринимающего ультразвуковые волны элемента 404, 405 и фиг. 10(d) показывает частично заднюю часть корпуса робота 8, на которой видны обращенные назад излучающий ультразвуковые волны элемент 404 и воспринимающий ультразвуковые волны элемент 405 справа и слева.
Хотя в приведенном выше описании фигурировали ультразвуковой датчик, воспринимающий инфракрасные лучи датчик и навигационная система, настоящее изобретение не ограничивается такой конструкцией и, например, может быть реализовано так, что будут использованы воспринимающий звуки датчик, датчик температуры, датчик ионизации и т.п., при незначительном изменении конструкции.
Описанные выше излучающий ультразвуковые волны и воспринимающий ультразвуковые волны элементы 404, 405 имеют конструкцию, которая крепится для предотвращения смещения, и обращены исключительно вперед (или назад), однако возможно использовать конструкцию, способную перемещаться в заданном диапазоне вправо-влево, о чем сказано ниже.
Как видно на фиг. 11(a) и по 11(e), иллюстрирующих такой вариант осуществления, излучающий ультразвуковые волны элемент 404 и воспринимающий ультразвуковые волны элемент 405 закреплены, соответственно, на держателях 411a 411b, и они и держатели 411a и 411b соединены соответственно с несущей базовой рамой 413 и реечным механизмом подачи 414 осями 412a, 412b, 412c, 412d. Реечный механизм подачи 414 соединен с двигателем 422 посредством ведущей шестерни 415, чем обеспечивается согласованное движение вправо-влево. В этом варианте осуществления электрическая схема излучающего и воспринимающего ультразвуковые волны элемента составлена, как показано на фиг. 11(f) из управляющей источником питания секции 417, которая обеспечивает мощность для согласованного движения реечного механизма подачи 414 и которая соединена с выводом "G" микрокомпьютера 30, таким образом, что подаваемое напряжение избирательно включается и отключается рабочим выключателем 417a. Передающая ультразвуковые волны секция 418 содержит излучающий ультразвуковые волны элемент 404 и соединена с выводом "A" управляющего микрокомпьютера 30. Обнаруживающая ультразвуковые волны секция 419, которая соединена с выводом "B", принимает отраженные ультразвуковые волны посредством воспринимающего ультразвуковые волны элемента 405, подтверждает наличие или отсутствие движения физического объекта и пересылает эту информацию на управляющую секцию 30. Генерирующая сигнал тревоги секция 420, соединенная с выводом "C", принимает от управляющего микрокомпьютера 30 извещение о наличии движущегося физического объекта, чтобы подать сигнал тревоги, секция запуска двигателя 421 перемещает ультразвуковой датчик 29 вправо-влево и соединена с выводами "D", "E" и "F" управляющего микрокомпьютера 30. Выключатель "сброс" 422 соединен с выводом "H" и сдерживает сигнал тревоги, генерируемый генерирующей сигнал тревоги секцией. Управляющий микрокомпьютер 30 соединен с соответствующими секциями, подает команды и управляет их работой.
Ниже описана работа этого варианта осуществления воспринимающего ультразвуковые волны средства, соответствующего настоящему изобретению.
Как видно на фиг. 11(b) и 11(f), когда нажат рабочий выключатель 417a управляющей источником питания секции 417 для подачи питания, сигнал об этом поступает на управляющий микрокомпьютер 30 через вывод "C", и управляющий микрокомпьютер 30 посылает сигнал инициализации состояния на каждый вывод.
В тот момент, когда сигнал "питание двигателя" появляется на выводе "O" и рабочий сигнал появляется на выводе "E" или "F", которым задается направление вращения, двигатель 422 приводится в движение в заданном направлении и ведущая шестерня 415, посаженная на валу двигателя 424, заставляет совершать реечный механизм привода 414 поступательное движение, тем самым излучающий ультразвуковые волны элемент 404 и воспринимающий ультразвуковые волны элемент 405, установленные на несущей базовой раме 413, согласованно движутся в заданном направлении. Когда ультразвуковой датчик 29 достигнет заданный угол "1", движение двигателя 423 прекращается. Затем, когда управляющая секция 30 установит, что движение двигателя полностью прекратилось, сигнал "источник питания" управляющей источником питания секции 417 поступает на передающую ультразвуковые волны секцию 418 через вывод "A", ультразвуковая волна излучается излучающим ультразвуковые волны элементом 404, принимающая ультразвуковые волны секция 419 принимает отраженную ультразвуковую волну через посредство воспринимающего ультразвуковые волны элемента 405 и передает свои данные на управляющий микрокомпьютер 30. Управляющий микрокомпьютер 30 оценивает значение, поступившее от принимающей ультразвуковые волны секции 419, и определяет: есть или нет движения физического объекта, подобного нарушителю и т.п. Как изображено на рис. 11(b), когда рабочий сигнал поступает на секцию запуска двигателя 421, чтобы переместить опознающий датчик 29, фиксированный в установочном углу "1" (справа), в установочный угол "2" (слева), опознающий датчик 29 достигает установочный угол "2", двигатель останавливается и описанная операция повторяется.
Если движение физического объекта, подобного нарушителю и т.п., обнаружено по любому направлению, управляющий микрокомпьютер 30 выдает сигнал на генерирующую сигнал тревоги секцию 420 через вывод "C", и генерирующая сигнал тревоги секция 420 непрерывно генерирует сигнал тревоги, пока пользователь не нажмет кнопку "сброс" SW и инициализирует работу. Могут выполняться другие процедуры, о которых сказано выше и будет сказано ниже.
Когда движущийся датчик 29 достигает предельного угла, т.е. заданный угол "2", направление вращения двигателя 423 изменяется, и, если этого не происходит по причине неисправности, генерируется сигнал тревоги для информирования об этом пользователя.
Как можно заметить из сказанного, зона обзора датчика 29 расширяется при использовании двигателя 423, в результате чего функциональная эффективность предотвращающего преступления устройства может возрасти вдвое.
Чертежи 12 представляют схемы передающей ультразвуковой секции для обнаружения подвижных объектов в соответствии с настоящим изобретением, которая использует нестабильный мультивибратор. Более конкретно, когда питание 12 В подается от батареи на базы и коллекторы транзисторов TR1 и TR2 через резисторы R2, R5, R7 и R8, транзисторы TR1 и TR2 становятся проводящими и от эмиттеров транзисторов TR1 и TR2 начинает течь ток, заряжающий конденсаторы C5 и C7. Когда заряд конденсаторов C5 и C7 завершается, потенциал эмиттеров TR1 и TR2 повышается, что влечет запирание транзисторов TR1 и TR2.
Однако, если конденсаторы C5 и C7 разряжаются через резисторы R3 и R6 потенциалы эмиттеров транзисторов TR1 и TR2 понижаются, что обеспечивает открытие транзисторов TR1 и TR2 вновь. Повторяющиеся заряд и разряд конденсаторов C5 и C7 описанным образом порождают импульсный сигнал заданной частоты на коллекторе транзистора TR1, передаваемый на излучающий ультразвуковые волны элемент, которого нет на этом чертеже.
Если посланная ультразвуковая волна отразится от подвижного объекта, подобного вору-взломщику, эта отраженная ультразвуковая волна воспринимается воспринимающим ультразвуковые волны элементом (который будет описан ниже) и сигнал "обнаружен подвижный объект" подается на микрокомпьютер 30. Микрокомпьютер 30 выполняет управление по выполнению процессов, например, для запуска сигнального средства, подобного громкоговорителю или зуммеру, или для инициирования автоматического номеронабирателя в зависимости от сигнала "обнаружен подвижный объект".
Обратимся к фиг. 12(b), где изображена конфигурация воспринимающей ультразвуковые волны секции 419, которая включает в себя воспринимающий ультразвуковые волны элемент 405, регулирующий коэффициент затухания узел 1 для предотвращения неправильного срабатывания робот-системы по причине наличия шумовых сигналов вокруг системы, первый и второй усилительные узлы 2 и 3 для усиления выходного сигнала регулирующего коэффициент затухания узла 1, и первый и второй фильтры 4 и 5 для фильтрования усиленного выходного сигнала усилительных узлов 2 и 3, соответственно.
Более конкретно, регулирующий коэффициент затухания узел включает в себя переключаемый схемный элемент SC1, имеющий входной вывод X0, непосредственно соединенный с ультразвуковым датчиком 405, входной вывод X1, соединенный с ультразвуковым датчиком 405 через резистор R11, входной вывод X2, соединенный с ультразвуковым датчиком 405 через резисторы R11 и R12, входной вывод X3, соединенный с ультразвуковым датчиком 405 с одним концом резистора R12, другой конец которого соединен с резистором R12, и входной вывод X4, соединенный с ультразвуковым датчиком 405 с одним концом резистора R14, другой конец которого соединен с другим концом резистора R13. Далее, на переключательный элемент SC1 поступает через входные вводы A и B двухбитовый выбирающий коэффициент затухания сигнал от микрокомпьютера 30. Если регулирующий коэффициент затухания узел 1 сконструирован так, как описано выше, то возможно подбирать подходящую комбинацию из резисторов R11 по R14 в зависимости от выбирающих коэффициент затухания сигналов A и B, обеспечивая безошибочную работу робот-системы.
Принятый таким образом ультразвуковой сигнал подается регулирующим коэффициент затухания узлом 1 на первичный усилительный узел 2, включающий в себя дифференциальный усилитель OP1, для усиления принятого ультразвукового сигнала, и затем первично усиленный ультразвуковой сигнал поступает на вторичный усилительный узел 3, включающий в себя дифференциальный усилитель OP2, для получения выходного сигнала, усиленного должным образом по амплитуде. Выходной усиленный сигнал затем фильтруется первым и вторым узлами фильтрации 4 и 5, и выходной отфильтрованный сигнал поступает на микрокомпьютер 30. Микрокомпьютер 30 устанавливает наличие подвижного объекта, например, вора-взломщика, на основе последовательных принятых ультразвуковых звуковых сигналов и выполняет управляющие действия по подаче сигнала тревоги и т.д., если возникнет необходимость.
Воспринимающий инфракрасные лучи узел 34, соответствующий настоящему изобретению, описан ниже со ссылками на фиг. 13. Воспринимающий инфракрасные лучи узел 34 получает принятый сигнал от трех инфракрасных датчиков SEN1, SEN2 и SEN3, , установленных на роботе под углом 120o относительно друг друга. Для упрощения изображения только один из трех датчиков со схемой его соединения изображен на фиг. 13. Более конкретно, как видно на фиг. 13 датчики SEN1, SEN2 и SEN3, из которых изображен только один SENI , соединены с затвором полевого транзистора MT1 для восприятия инфракрасного излучения от человеческого тела, и полевой транзистор MT1 соединен своим стоком с первым входным выводом "+" усилителя AM3 в первичном усилительном узле 1. Выходной вывод усилителя AMP 3 соединен с вторым входным выводом "-" усилителя AMP 4 вторичным усилительным узлом 2, и выходной вывод усилителя AMP4 соединен с входным выводом AN3 микрокомпьютера 30, соответственно. Выходы схем датчиков SEN2 и SEN3 (не изображены) аналогичным образом соединены с входными портами AN2 и AN4 микрокомпьютера.
Если воспринимающий инфракрасные лучи узел 34 сконструирован описанным выше образом и инфракрасные лучи от человеческого тела воспринимаются одним из датчиков SEN1, SEN2 и SEN3 , соответствующий полевой транзистор MT1 становится проводящим, и его выходной сигнал поступает на первый входной вывод усилителя AMP3 для усиления этого сигнала. Усиленный сигнал поступает на второй входной вывод усилителя AMP4 для вторичного усиления этого сигнала. Выходной усиленный сигнал усилителя AMP4 поступает на соответствующий выходной вывод AN2, AN3 или AN4 микрокомпьютера 30. Микрокомпьютер 30 устанавливает наличие нарушителя или вора-взломщика на основе сигнала от вторичного усилительного узла 2 и приводит в действие, например, автоматический номеронабиратель для автоматической передачи сообщения и включает громкоговоритель или зуммер для создания сигнала тревоги.
На фиг. 14 изображена схема для различения звукового сигнала, принятого воспринимающим звуки элементом, подобным микрофону, по принадлежности человеку, например, плачущему ребенку, или разбиваемому окну. Схема, изображенная на фиг. 14, включает в себя первый полосовой фильтр 1, который содержит первый компаратор COM1, имеющий неинвертирующий входной вывод "+", принимающий этот звуковой сигнал, и инвертирующий входной вывод "-", соединенный с общей точкой резисторов R13 и Rl4, второй полосовой фильтр 2, который содержит второй компаратор COM2, имеющий неинвертирующий входной вывод "+", принимающий звуковой сигнал через резисторы R22 и R23, и инвертирующий входной вывод "-", соединенный с резисторами R24 и R25 и конденсатором C16, усилительный узел 3, имеющий инвертирующий входной вывод "-", принимающий выходной сигнал первого компаратора COM1, и генерирующий звуковой сигнал узел 4, имеющий переключающий транзистор TR3, база которого соединена с выходной стороной второго усилителя AMP1, при этом соответствующие неинвертирующие входные выводы "+" первого и второго усилителей AMP1 и AMP2 принимают звуковой сигнал. Если эта схема сконструирована, как описано выше, сигнал, воспринимаемый звуковым датчиком 35, изображенным на фиг. 1, поступает и фильтруется первым и вторым компаратором COM1 и COM2. Опорные значения задаются так, что выходной сигнал первого компаратора COM1 принимает высокий уровень, когда звуковой сигнал взрывного типа, в то время как выходной сигнал второго компаратора COM2 принимает высокий уровень, когда звуковой сигнал является речевым сигналом. Выходной сигнал высокого уровня первого или второго компаратора COM1 или COM2 поступает для усиления на первый или второй усилитель AMP1 или AMP2. Выходной сигнал усилителя AMP1 выводится в качестве речевого сигнала (от громкоговорителя и т.п.) в то время как выходной сигнал второго усилителя AMP2, подается на транзистор TR3. В результате, транзистор TR3 периодически переключается путем заряда и разряда конденсатора C14 для выдачи прямоугольного импульса в ответ на взрывной сигнал. Выходной сигнал усилителя AMP1 имеет уровень, соответствующий звуковому сигналу, и поступает на второй микрокомпьютер 30. Второй компьютер 30 устанавливает, является ли сигнал взрывным сигналом или речевым сигналом. Если сигнал взрывной, второй микрокомпьютер 30 выполняет операцию автоматического набора, т.д. в противном случае, если сигнал является речевым, микрокомпьютер 30 информирует о плаче ребенка пользователя, имеющего при себе монитор.
На фиг. 15 представлена схема принимающего и передающего сигналы узла 32. Эта схема построена так, что она передает сигнал тревоги, информируя о присутствии вора-взломщика, и генерирует звуковой сигнал, воспринимаемый воспринимающим звук узлом, изображенным на фиг. 14, для монитора, или принимает команды от монитора.
Более конкретно, речевой сигнал, принятый воспринимающим звук узлом, представленный на фиг. 14, преобразуется в сигнал YCOM посредством вводящего речевой сигнал узла 1, который включает в себя регулируемый резистор R16, варакторный диод D2, индуктивную катушку L2 и резистор R12 и т.д., и сигнал YCOM поступает в качестве принятого звукового сигнала на микрокомпьютер 30. Микрокомпьютер 30 создает выбирающие частоту сигналы Y2S и Y1S , способные изменять модулирующую частоту, причем выбирающие частоту сигналы Y2S и Y1S задает пользователь для предотвращения вмешательства. Поэтому кварцевый генератор Y1S или Y2S, возбуждается выбирающим частоту сигналом Y2S или Y1S, выбранным пользователем, и генератор Y1 или Y2 генерирует заданную частоту. Сигнал генерируемой частоты модулируется модулятором 2, высокочастотным усилителем 3 и передающим речевой сигнал узлом 4 известным способом и передается через антенну AT1 на монитор, извещая о генерировании речевого сигнала пользователя, имеющего при себе монитор.
Сигнал, подобный команде и переданный с монитора, поступает на входной радиочастотный узел 5 через антенну AT1. Входной сигнал демодулируется в демодулирующем узле 6, усиливается усилительным узлом и формируется в узле формирования сигнала 8, включающем в себя логические элементы И-НЕ ND1, ND2 и ND3. Сформированный сигнал поступает на микрокомпьютер 30. Микрокомпьютер 30 анализирует входной сигнал и выполняет действия по выполнению соответствующей функции.
Цифровой позицией 9 обозначен передающий принятый звук узел, который построен из генерирующего высокую частоту средства SAWRI для генерирования заданной высокой частоты и так называемой образцовой индуктивной катушки L5 для передачи высокочастотного сигнала, генерируемого генерирующим высокую частоту средством SAWRI, в определенной последовательности для выполнения функции автоматического набора под управлением микрокомпьютера 30.
Работа по заряду батареи, встроенной в робот-систему, и индикация состояния заряженности батареи описаны ниже со ссылками на фиг. 16.
Если вилка переменного тока робот-системы вставлена в розетку переменного тока, когда робот-система не работает, переменный ток сети преобразуется в постоянный ток с помощью обычной мостовой схемы выпрямления 36 и конденсаторов C25, C24, и напряжение постоянного тока поступает на регулятор напряжения VR2.
Регулятор VR2 создает стабилизированное напряжение постоянного тока. Шумовая составляющая, содержащаяся в напряжении постоянного тока, отфильтровывается конденсаторами C1 и C2 и трансформатором T1, и напряжение постоянного тока подается на батарею, встроенную в робот, для заряда этой батареи. Регулятор напряжения VR2 соединен выводом U и выходным выводом OUT (выход) с токоограничивающей схемой, ограничивающей максимальный ток, который протекает через транзистор TR13 и резисторы R35 по R37.
В тоже время часть напряжения, созданного регулятором напряжения VR2, поступает на переключаемый транзистор TR17 через диод D10, в результате чего транзистор TR17 обычно оказывается проводящим, когда робот соединен с источником переменного тока.
Как результат, сигнал низкого уровня появляется на коллекторной стороне транзистора TR17 и поступает на вывод PBO микрокомпьютера 30. Микрокомпьютер 30 определяет состояние заряженности батареи на основе сигнала низкого уровня и выполняет управление, чтобы система робота не работала во время заряда.
Одновременно с этим микрокомпьютер 30 (смотрите фиг. 3) подает команду на изменение потенциала выбирающего функцию переключателя 3 на низкий уровень, чтобы засветился индицирующий состояния заряда светоизлучающий диод D13, расположенный на дисплее 42, для индикации состояния заряженности батареи.
На фиг. 17 представлена управляющая источником питания схема, которая может прерывисто подавать питание на систему робота, если необходимо, с целью уменьшения потребления энергии.
Управляющая источником питания схема 80, изображенная на фиг. 17, содержит известный осциллятор 1, обеспечивающий напряжение на источнике питания узел 2, включающий в себя первый транзистор TR18, эмиттер и база которого соединены с первым источником питания 12 В, и второй транзистор TR16, коллектор которого соединен с базой транзистора TR18 через резистор R92 и его база соединена с эмиттерной стороной транзистора TR18 через резистор R93. Управляющий источником питания узел 3 включает в себя первый логический элемент И-НЕ ND1, вход которого соединен с вторым источником питания 3В, и выбирающий функцию переключатель KEY0 клавиатуры 31, второй логический элемент И-НЕ ND2, один вход которого соединен с выходом первого логического элемента И-НЕ ND1, другой вход которого соединен с вторым источником питания 3В через резистор R104 и с выходным выводом "управляющий сигнал" PA4, и выходной вывод которого соединен с другим входом первого логического элемента И-НЕ ND1. Входные выводы третьего логического элемента И-НЕ ND3 совместно соединены с выходным выводом первого логического элемента И-НЕ ND1, и четвертый логический элемент И-НЕ ND4, вход которого соединен с эмиттером транзистора TR16 в обеспечивающем напряжение на источнике питания узле 2, другой вход которого соединен с выходным выводом третьего логического элемента И-НЕ ND 3 через диод D16, и выходной вывод которого соединен с выходным выводом S ТОР (останов) микрокомпьютера 30. На фиг. 17 цифровой позицией 4 обозначен генерирующий питание узел для генерирования питающего напряжения для каждого схемного узла системы робота.
В управляющей источником питания схеме, сконструированной описанным выше образом, когда первое питание (12В) подается от названной батареи, когда робот неподвижен, транзистор TR18 проводит, и выходное напряжение на эмиттерной стороне транзистора TR18 подается на базу транзистора TR16, который также становится проводящим. Транзистор TR16 смещается напряжением, разделенным резисторами R93 и R94 так, что второе напряжение - скажем 3 В - появляется на эмиттерной стороне транзистора TR18. Второе напряжение (3 В) подается на микрокомпьютер 30 в качестве резервного напряжения предотвращения утери данных, хранящихся на микрокомпьютере 30, и т.д., даже если прервется подача от основного источника питания системы робота.
Когда система робота остановлена, второе напряжение 3 В поступает на один конец логического элемента И-НЕ ND2, поэтому логический элемент И-НЕ ND2 выдает сигнал высокого уровня. Сигнал высокого уровня поступает на один вход логического элемента И-НЕ ND1, на другом входе которого поддерживается высокий уровень вторым напряжением 3 В. Как результат, логический элемент И-НЕ ND1 выдает сигнал низкого уровня. Этот сигнал низкого уровня поступает на транзистор TR3, соединенный по схеме Дарлинг-тона с транзистором TR4, так, что оба транзистора TR3 и TR4 оказываются непроводящими, переключающий транзистор также оказывается непроводящим и на регуляторе напряжения VP1 нет выходного напряжения. С другой стороны, выходной сигнал низкого уровня логического элемента И-НЕ ND1 поступает на два входных вывода логического элемента И-НЕ ND3, в результате чего логический элемент И-НЕ ND3 выдает сигнал высокого уровня, который поступает на один вход логического элемента И-НЕ ND 4. Поэтому логический элемент И-НЕ ND4 выдает сигнал высокого уровня, поступающий на входной вывод STOP (останов) микрокомпьютера 30. Микрокомпьютер 30 затем управляет вторым микрокомпьютером 10 так, чтобы не выполнялась какая-либо функция системы робота.
В противном случае, если функциональный переключатель, например 3, на клавиатуре 31, изображенной на фиг. 3, нажат пользователем, выбирающий функцию переключатель KPT переходит на низкий уровень. В этот момент микрокомпьютер 30 выдает сигнал низкого уровня через выходной вывод PA4 на логический элемент И-НЕ ND2. Как результат логический элемент И-НЕ ND2 выдает сигнал низкого уровня. В этом случае на другой вход логического элемента И-НЕ MDI поступает сигнал низкого уровня, в результате чего логический элемент И-НЕ ND 1 выдает сигнал высокого уровня.
Поэтому транзисторы TR 3 и TR4 в генерирующем напряжение питания узле 4 оказываются проводящими и транзистор TR5 также становится проводящим.
Поэтому регулятор напряжения VRI создает определенное напряжение. Выходной сигнал высокого уровня, созданный логическим элементом И-НЕ ND1 поступает на логический элемент И-НЕ ND3 , поэтому этот вентиль выдает выходной сигнал низкого уровня. Таким образом, логический элемент И-НЕ ND4 создает выходной сигнал низкого уровня, который поступает на входной вывод STOP микрокомпьютера 30.
Как сказано, используя управляющую источником питания схему, соответствующую настоящему изобретению, поскольку второе напряжение, служащее резервным напряжением, может создаваться первым источником питания 12 без применения отдельной батареи, возможно минимизировать потребление энергии батареи и предотвратить потерю данных, хранящихся в микрокомпьютере, в нерабочем режиме, что способствует удлинению срока службы батареи, встроенной в систему робота.
Далее, ниже будет описана со ссылкой на фиг. 18 восстанавливающая систему схема для предотвращения системы робота от неправильного срабатывания, даже если напряжение питания от батареи упадет ниже заданного уровня.
Восстанавливающая систему схема 81 (впервые представленная фиг. 2(b), содержит компаратор COP1, инвертирующий вход "-" которого соединен с первым источником напряжения 12 В через резисторы делителя R41 R42 и неинвертирующий входной вывод "+" которого соединен с источником опорного напряжения, соответствующего допустимому уровню напряжения. Компаратор COP1 создает выходной сигнал высокого уровня, когда напряжение питания падает ниже 2,5 В. Дополнительно, восстанавливающая систему схема содержит транзистор TR13, эмиттер которого соединен с землей и коллектор которого соединен с выводом RESET (сброс) микрокомпьютера 30. Транзистор TR13 становится непроводящим, когда выходной сигнал компаратора COP1 имеет высокий уровень. Таким образом, токовая цепь между эмиттером и коллектором транзистора TR13 заземляется для восстановления (сброса) микрокомпьютера 30.
Далее, восстанавливающая систему схема включает в себя переключаемый транзистор TR12 для сброса микрокомпьютера 30 в случае, когда последний входит в ненормальное состояние в результате соревнования между первым и вторым микрокомпьютером, 10 и 30, как будет описано ниже. У транзистора TR12 коллектор соединен с выводом RESET (сброс) микрокомпьютера 30, база соединена с выходным выводом RSTM микрокомпьютера 10 и эмиттер заземлен.
При наличии описанной выше конструкции, когда возникает соревнование между микрокомпьютерами 10 и 30, и если микрокомпьютер 30 ведет себя ненормально, сигнал сброса высокого уровня подается с выходного вывода RSTM микрокомпьютера 10, что делает транзистор TR12 проводящим. Как результат, вывод RESET микрокомпьютера 30 получает сигнал низкого уровня для сброса микропроцессора 30. В противном случае, в состоянии, когда вывод "сброс" микрокомпьютера 10 удерживается на высоком уровне, если микрокомпьютер 10 работает ненормально, сигнал низкого уровня появляется на выходном выводе РА7 микрокомпьютера 30 и передается на вывод "сброс" микрокомпьютера 10, восстанавливая исходное состояние микрокомпьютера 10. Поэтому есть возможность предотвратить неправильную работу по причине сбоя самой системы.
Подвижное контрольное устройство по настоящему изобретению включает в себя средство автоматического управления связью, и есть двухсторонняя связь между средством автоматического управления связью и роботом, благодаря чему можно управлять рабочими состояниями робота даже с удаленного пункта.
Чтобы решить эту задачу настоящего изобретения, средство автоматического управления связью, соответствующее настоящему изобретению, включает в себя микропроцессор, секцию источника питания, входную клавишную секцию для ввода программы в микропроцессор и секцию вспомогательного источника питания, радиоприемную секцию, которая принимает тревожный сигнал об экстренной ситуации и ответный сигнал на управление от робота, которые вводятся в микропроцессор, приемопередающую телефонные тональные сигналы (или импульсы набора) секцию, которая посылает телефонные тональные сигналы, хранящиеся в памяти, принимает вызов по внешней телефонной линии и принимает телефонный звуковой сигнал от внешнего пользователя, синтезирующую речевой сигнал секцию, которая синтезирует и воспроизводит речь в соответствии с ситуацией под управлением микропроцессора, радиопередающую секцию для передачи управляющего сигнала по радио на корпус робота в соответствии с телефонным сигналом, принятым по внешней телефонной линии, и дисплейную секцию для отображения входных сигналов, поступающих по входной клавиатурной секции или дистанционной системы, или состояния робота.
Ниже описан предпочтительный вариант осуществления средства автоматического управления связью, соответствующего настоящему изобретению, со ссылками на приложенные чертежи.
Фиг. 19(a) является схематичным чертежом, иллюстрирующим общую конфигурацию средства автоматического управления связью, фиг. 19(b) является блок-схемой средства автоматического управления связью, и фиг. 19(c) является блок-схемой, иллюстрирующей последовательность операций средства автоматического управления связью, соответствующего настоящему изобретению.
Приемопередающие средства размещены в роботе и в средстве автоматического управления связью, чем обеспечивается двухсторонняя связь между корпусом робота и средством автоматического управления связью, благодаря чему даже с удаленного пункта можно управлять роботом, а также иметь представление о работе робота.
На фиг. 19(a) позицией R обозначен робот, имеющий радиоприемные- и передающие функции, цифровой позицией 600 обозначено средство автоматического управления связью, которое принимает по радио сигнал об аварийной ситуации, характеризующий экстренную ситуацию, опознанную встроенный в робот датчиками или внешним датчиком 630, и извещает об этом известный удаленный пункт, используя известную телефонную линию. Когда внешний пользователь осуществляет дистанционно управление, пользуясь телефонным аппаратом 660, управляющие сигналы посылаются по телефонной линии на средство 600 и затем на робот R по радио. Ответный радиокод передается от робота R и средство 600 синтезирует заранее заготовленное ответное сообщение в ответ на ситуацию и затем передает это сообщение удаленному пользователю по телефонной линии 650 для подтверждения приема.
Датчики 630, 640 дополняют датчики, размещенные на роботе, и передают обнаруженные сигналы на робот R или на средство автоматического управления связью 600 по проводу или по радио. Эти датчики включают в свой состав такие, как названные выше датчики человеческого тела или открытого огня.
На фиг. 19 (b) цифровой позицией 670 обозначен микропроцессор, цифровой позицией 601 обозначена секция источника питания, которая принимает мощность от выпускаемого промышленностью источника питания, обеспечивая энергией систему, и цифровой позицией 602 обозначена секция вспомогательного источника питания, которая может заменить подзаряжаемую батарею, встроенную в основной источник питания, когда напряжение, создаваемое секцией основного источника питания 601, падает ниже своего номинального значения. Это обеспечивает подачу питания заданное время, даже если произойдет прекращение подачи энергии.
Цифровой позицией 603 обозначена входная клавиатурная секция, состоящая из нескольких клавиш, для ввода сигналов, необходимых для работы средства автоматического управления связью, в микропроцессор 670, цифровой позицией 604 обозначена дисплейная секция, состоящая из, например, нескольких светоизлучающих диодов, которые может заставить светиться микропроцессор 670, чтобы отобразить рабочее состояние робота, а также рабочее состояние средства автоматического управления связью и цифровой позицией 605 обозначена радиопередающая секция, которая, когда внешний пользователь вводит управляющий сигнал для управления роботом, передает управляющий сигнал на робот по радио.
Цифровой позицией 606 обозначена радиоприемная секция, которая принимает сигнал от робота или от датчика 630, соединенного с ним, по радио и передает свой выходной сигнал на микропроцессор 670. Цифровой позицией 607 обозначена приемопередающая телефонные тональные сигналы секция для вызова и соединения с удаленным телефонным аппаратом в случае обнаружения экстренного сигнала среди сигналов, поступающих от радиоприемной секции 606 на микропроцессор 670, или воспринимает разнообразные управляющие сигналы, посылаемые от удаленного телефонного аппарата внешним пользователем, и преобразует и вводит их в микропроцессор 670. Синтезирующая речь секция 608 воспроизводит предварительно записанные сообщения, соответствующие текущей экстренной ситуации, посылая сообщение внешнему пользователю (или на другой пункт) по интерфейсу телефонной линии 609.
При использовании средства автоматического управления связью, соответствующего настоящему изобретению, когда поступает питание от секции источника питания 601 и данные, необходимые для управления роботом, введены в микропроцессор 670 через посредство входной клавиатурной секции 603, введенные сигналы отображаются на дисплейной секции 604 и одновременно передаются на робот радиопередающей секцией 605, чтобы можно было управлять роботом.
Когда внешний пользователь вводит управляющий сигнал для управления роботом голосом или тональным сигналом через общую телефонную линию, управляющий сигнал воспринимается приемопередающей секцией 607 через интерфейс телефонной линии 609 для закодирования и введения в микропроцессор. Затем микропроцессор 670 управляет радиопередающей секцией 605, и управляющий сигнал передается на робот для управления им.
Когда сигнал об экстренной ситуации вводится в радио-принимающую секцию 606 от робота R или от датчика, подобного отдельному датчику 630, микропроцессор 670 управляет приемопередающей секцией 607 для генерирования телефонных вызывных тональных сигналов и установления непосредственной связи с телефонной линией 650 через интерфейс телефонной линии 609 для обеспечения связи с внешним пользователем или ответственными за безопасность работниками.
Микропроцессор 670, если необходимо, генерирует речевое сообщение, используя для этого синтезирующую речь секцию 608, и передает речевой сигнал по телефонной линии через интерфейс 609. Микропроцессор также анализирует секретный код, известный только пользователю, для доступа к управлению роботом, введенный по телефонной линии, и гарантирует доступ к роботу, если введен правильный код.
Ниже описан рабочий процесс средства автоматического управления связью, соответствующего настоящему изобретению, со ссылками на схему, представленную на фиг. 19(c).
Средство автоматического управления связью, соответствующее настоящему изобретению и представленное фиг. 19(c) сохраняет резервное состояние при операции S1 и определяет при операции S2 наличие сигнала об экстренной ситуации от робота или другого источника, а также управляющего сигнала, введенного внешним пользователем.
Оно определяет, был или нет сигнал об экстренной ситуации принят от робота R и введен в микрокомпьютер 670 через радиоприемную секцию 606 или был или нет сигнал об экстренной ситуации, поданный датчиком 630, передан по радио через радиоприемную секцию 606 и передан процессору. Оно также определяет, был или нет управляющий сигнал для управления роботом введен посредством телефонного аппарата через интерфейс общей телефонной линии 609 и приемопередающую секцию 607 и был ли принят входной сигнал от датчика 640.
Если не будет обнаружен ввод ни сигнала об экстренной ситуации, ни управляющего сигнала, происходит возврат к операции S1, и сохраняется состояние готовности. Если сигнал об экстренной ситуации получен от одного из датчиков 630, 640, соединенных радио- или проводной связью с роботом или радиоприемной секцией 606, выполняется переход к операции S3, при которой микропроцессор 670 управляет интерфейсом телефонной линии 609 так, чтобы установить соединение ("снять трубку") по телефонной линии и, при операции S4 он посылает управляющий сигнал на приемопередающую телефонные тональные сигналы секцию 607, чтобы выбрать зону связи (зарезервированный телефонный номер, соответствующий экстренной ситуации), и вызывает набор телефонного номера, соответствующего выбранной зоне связи.
Затем приемо-передающая секция 607 набирает соответствующий телефонный номер, и при операции S5 определяется занятость набранного телефонного номера.
После приема ответного тонального сигнала или сигнала занятости при операции S5, если принят сигнал занятости (т.е. в случае YES "да") интерфейс 609 при операции S6 требует управления состоянием линии с повешенной трубкой микропроцессором 670 (телефонная линия разъединена) и затем, спустя определенный временной отрезок, возвращается вновь на операцию S3 и повторяет набор номера. Если принят ответный тональный сигнал (соответствующий телефонный номер не занят), происходит переход к операции S7, при которой определяется факт "подъема телефонной трубки". Если телефонная трубка не снята, устанавливается определенный интервал ожидания, и если трубка снята, выполняется переход к операции S8, при которой передается извещение или код, соответствующий экстренной ситуации, или сообщение, соответствующее экстренной ситуации, записанное ранее, выдается через синтезирующую речь секцию 608, которая периодически передает сообщение наперед заданное число раз.
При операции S9 определяется завершенность передачи сообщения или кода ситуации и в случае завершения при операции S10 интерфейс телефонной линии 609 возвращает линию к состоянию "трубка на рычаге", после чего происходит возврат к операции S3. Этот процесс воспроизводится для каждой зарезервированной зоны (подлежащий вызову в экстренном случае телефонный номер), как описано выше, и при незавершенности операции передачи передача продолжается.
Конечно, когда операция передачи завершена, происходит возврат к операции S1, т. е. в состояние готовности, и вновь начинается обнаружение передачи сигнала об экстренной ситуации.
С другой стороны, когда управляющий сигнал (вызывной сигнал) для робота, который не является сигналом об экстренной ситуации, принимается от удаленного телефонного аппарата и поступает на микропроцессор 670 при операции S2, микропроцессор 670 управляет интерфейсом телефонной линии 609 и соединяет линию при операции S11, и при операции S12 он управляет синтезирующей речь секцией таким образом, что она подсказывает пользователю ввести секретный код, и затем входит в состояние готовности к приему.
В состоянии готовности к приему, при операции S13, выполняется проверка факта получения секретного номера в виде телефонного тонального сигнала или другим способом по телефонной линии, и, если он получен, выполняется переход к операции S14 при которой телефонные тональные сигналы преобразуются секцией 607 в управляющий код, который можно ввести в микропроцессор 670.
При операции S15 выполняется проверка факта совпадения секретного номера управляющего кода, принятого микропроцессором 670 от секции 607, с хранящимся кодом.
Если в результате проверки при операции 515 скажется, что получен неправильный секретный номер (несовпадение), выполняется переход от операции S21, при которой прерывается телефонная линия, и далее выполняется переход к операции S 1, т.е. к состоянию готовности. Если секретные номера совпадут, выполняется переход к операции S16, при которой передается сообщение через синтезирующую речь секцию 608, подсказывающую внешнему пользователю ввести управляющий код.
Введенный управляющий код принимается при операции S17 микропроцессором 670 приемопередающей телефонные тональные сигналы секцией 607, и микропроцессор 670 при операции S18 генерирует управляющий радиосигнал, соответствующий управляющему коду, и передает его на робот через радиопередающую секцию 605.
Робот принимает управляющий сигнал от радиоперадающей секции 605, выполняет соответствующую управляющую операцию и затем передает результирующий сигнал по радио при операции S19. Радиопринимающая секция 606 средства автоматического управления связью 600 принимает этот сигнал, микропроцессор анализирует его, передает сообщение о состоянии, соответствующем результату анализа, при операции S20 через интерфейс телефонной линии 609, оповещая внешнего пользователя о том, что управляющий сигнал принят и обработан.
Поскольку средство автоматического управления связью, соответствующее настоящему изобретению, упрощает управление роботом из удаленного пункта, надлежащее управление возможно с целью эффективного использования робота.
Ниже описано вспомогательное устройство подвижного контрольного устройства, соответствующего настоящему изобретению, в виде средства обнаружения нарушителя, которое монтируется вблизи окна и обнаруживает нарушителя, проникающего через окно, путем ультразвукового обнаружения.
Средство обнаружения, соответствующее этому аспекту изобретения, использует детектор, который поворачивается в секторе 180o с помощью магнитного привода, для обнаружения нарушителя в угле обзора 180o и одновременного определения "габаритов нарушителя", чтобы можно было игнорировать небольшие предметы, попадающие в зону обзора (небольшие животные, т.п.).
Чтобы решить описанную выше задачу, средство обнаружения нарушителя включает в себя микропроцессор, память для запоминания данных, собранных ультразвуковым датчиком, магнитную катушку для генерирования магнитодвижущей силы для вращения ультразвукового датчика, магнитный датчик для слежения за ультразвуковым датчиком, когда он поворачивается в заданном углу от заданной позиционной точки, и радиопередатчик для связи с внешней средой с целью сообщения о ненормальном состоянии, обнаруженном микропроцессором.
Ниже подробно описано со ссылками на приложенные чертежи средство обнаружения нарушителя, соответствующее настоящему изобретению.
Фиг. 20(a) дает вид сбоку средства обнаружения, соответствующего предпочтительному варианту осуществления настоящего изобретения. Фиг. 20(b) дает вид в вертикальном разрезе средства, представленного на фиг. 20(a), фиг. 20(c) дает примерную схему, иллюстрирующую работу настоящего изобретения, и фиг. 20(d) представляет блок-схему, иллюстрирующую последовательность операций.
На чертежах с 20(a) по 20(d) цифровой позицией 700 обозначен корпус средства обнаружения нарушителя и цифровой позицией 702 обозначен ультразвуковой датчик для передачи и приема ультразвуковой волны, установленный на несущей датчик опоре 703. Оси 704 расположены в заданных местах по обе стороны несущей датчик опоры 703, и смазанные подшипники 705 установлены на концах осей 704, обеспечивающие свободный и плавный поворот ультразвукового датчика 702 на 180o.
Пружины 706 прикреплены к смазанным подшипникам 705, и крепежные гайки 707 охватывают подшипники 705 и пружины, закрепляя ультразвуковой датчик 702 на опоре 708.
Цифровой позицией 710 обозначена магнитная катушка, которая закреплена на корпусе 700 под определенным углом, для создания вращающего усилия, действующего на ультразвуковой датчик 702, который включает в себя магнит 709, прикрепленный к нижнему концу несущей опоры 703, и обеспечивает поворот ультразвукового датчика 702. Магнитная катушка 710 и магнит 709 расположены друг против друга, что изображено жирными линиями.
Цифровой позицией 711 обозначен магнитный датчик, прикрепленный на уровне средней точки ультразвукового датчика 702. Датчик 711 гарантирует, что ультразвуковой датчик 702 не повернется более чем на 180o. Датчик реагирует на поле магнита 709, когда поворачивается вместе с ультразвуковым датчиком 702, определяя, поворачивается ли ультразвуковой датчик 702 на правильный угол.
Цифровой позицией 712 обозначен микропроцессор, цифровой позицией 713 обозначена память для хранения данных во время поворачивания ультразвукового датчика 702, и позицией 714 обозначен радиопередатчик для передачи через антенну ANT сигнала, указывающего на ненормальное состояние, обнаруженное микропроцессором 712, например, средство автоматического управления связью 600.
Входные и выходные выводы ультразвукового датчика 702 кабелями 716 соединены с несущей датчик опорой 703, осями 704, крепящими гайками 707 и микропроцессором 712 через разъемы 717.
Ниже описана последовательность обнаружения операций средства обнаружения нарушителя со ссылками на блок-схему, представленную на фиг. 20(d).
Когда при операции S1 подается питание на магнитную катушку 710, чтобы привести в действие средство обнаружения нарушителя, то при операции S2 ультразвуковой датчик поворачивается против хода часовой стрелки по причине отталкивания друг от друга магнита 709 и пульсирующего поля, создаваемого магнитной катушкой 710. При операции S3 проверяется, достаточно ли далеко повернулся по ходу часовой стрелки датчик 702, чтобы включился магнитный датчик 711.
Когда магнитный датчик 711 обнаруживает намагничивающую силу магнита 709, он включается, индицируя базовую точку, в которой ультразвуковой датчик 702 повернут на 180o (90o в любом направлении от начальной точки, изображенной пунктирной линией).
Если магнитный датчик 711 не включен, управление передается к операции при S1, при которой импульс энергии, поступающий на магнитную катушку 710, постоянно возрастает, пока магнитная сила возрастет настолько, что вращающее усилие на ультразвуковом датчике 702 заставит его достигнуть точки 180o. Синхронизация питания катушки выполняется так, как иллюстрируют чертежи 8 и 9.
Как результат обнаружения при операции S 3, когда включится магнитный датчик 711, поскольку датчик 702 повернулся и достиг угла 180o, микропроцессор 712 так управляет магнитной силой магнитной катушки 710 и синхронизирует питание, что сохраняется заданное вращающее усилие на ультразвуковой датчик 702.
Далее, при операции S4 определяется интервал, на котором включается магнитный датчик 711. Этот интервал разбивается на несколько более мелких интервалов, которые соответствуют заданным угловым смещениям датчика 702. Таким образом, определяется синхронизация излучения ультразвуковых импульсов, чтобы несколько импульсов формировалось за каждый цикл качания датчика, как иллюстрирует фиг. 20(c). При операции S5 ультразвуковой датчик 702 посылает ультразвуковые волны в заданные интервалы, а также принимает отраженную волну.
При операции S6 опорные данные о состоянии, когда отсутствует нарушитель, запоминаются в памяти 713 путем использования принятых данных, относящихся к отраженной волне, по одному набору данных на каждый интервал разворота, когда активизирован ультразвуковой датчик 702. При операции S7 опорные данные, запомненные памятью 713, сравниваются с данными, записанными после в память 713 для сопоставимых интервалов разворота. При операции S8 выполняется проверка наличия расхождения между опорными и обнаруженными данными.
В результате сравнивания при операции S8, если обнаружено расхождение между опорными данными и обнаруженными данными текущего состояния, то выносится первое решение о ненормальном состоянии. При операции S9 определяется размер нарушившего границу (дома) объекта по значению разности между опорными данными и данными, относящимися к текущему состоянию. Пороговое значение, обуславливающее подачу тревожного сигнала, устанавливается соответствующим существенно большой разнице. Если это значение превышается, то выполняется переход к операции S10. Если нет, то выполняется возврат к операции S5.
При операции S10 осуществляется связь с внешним миром через посредство радиопередающей секции для передачи сообщения об обнаружении нарушителя. Этот сигнал принимает средство автоматического управления связью 600, и далее предпринимаются меры (подача тревожных сигналов, установление телефонной связи с удаленными пунктами, т.п.), о которых сказано выше и будет сказано ниже.
Ультразвуковое средство обнаружения, использующее ультразвуковой датчик, сконструировано так, что оказывается способным определить наличие нарушителя и оценивать "габариты" нарушителя на основе данных, полученных ультразвуковым датчиком за время поворота на 180o, что позволяет делать правильный вывод и избегать ошибок.
Ниже описано средство принятия экстренных мер, являющееся частью подвижного контрольного устройства, соответствующего настоящему изобретению.
Средство принятия экстренных мер служит для немедленного выполнения экстренных мер для сведения к минимуму потерь и повреждений после обнаружения газа, огня или нарушителя.
В соответствии с настоящим изобретением, чтобы эта задача была решена в случае утечки газа, под управлением микрокомпьютера срабатывает соленоидный вентиль и дверь открывается приводным двигателем, а газовый вентиль перекрывается, прекращая утечку газа, и просочившийся газ выпускается наружу. Когда обнаружен нарушитель, срабатывает другой соленоид, закрывая жалюзи в точках, через которые нарушитель может удалиться.
Ниже подробно описан вариант осуществления средства принятия экстренных мер, соответствующего настоящему изобретению.
Робот R подвижного контрольного устройства, соответствующего этому варианту осуществления изобретения, включает в себя описанные выше приводную систему и ультразвуковой датчик 29, который излучает ультразвуковые волны и принимает отраженную волну и определяет прямые и боковые движения физического объекта, инфракрасный обнаруживающий датчик 34, который воспринимает инфракрасное излучение человеческого тела для определения правого и левого перемещения физического объекта, обнаруживающий звуки датчик 35, который воспринимает и различает треск разбиваемого стекла, плач или крики ребенка и т. п. , обнаруживающий огонь датчик 40 для обнаружения начала пожара и обнаруживающий утечку газа датчик 41 для обнаружения утечки газа. Микрокомпьютер 30 принимает сигналы этих датчиков и устанавливает факт возникновения ненормального состояния внутри дома или офиса и управляет передачей сигналов через свою антенну на монитор M, средство автоматического управления связью 600 и средство принятия экстренных мер 800.
В сконструированном таким образом подвижном контрольном устройстве, когда микрокомпьютер 30 примет сигнал обнаружения от ультразвукового / инфракрасного датчика 29, 34 и установит наличие нарушителя, сигнал, передаваемый контроллером 32, поступает на принимающую секцию 801 средства принятия экстренных мер 800, изображенное на фиг. 21(a), срабатывает соленоидный вентиль 809, и запущенный двигатель 811 закрывает жалюзи 812, установленные у дверей и окон, предотвращающие бегство нарушителя. Могут быть приняты другие меры, ограничивающие передвижение нарушителя, и, конечно, одновременно активизируется средство 600 для обеспечения телефонной связи с. полицией, т. д. Когда обнаруживающий утечку газа датчик 40 обнаружит утечку газа, как описано выше, передающий контролер 32 передает сигнал, который принимает принимающая секция 801 средства принятия экстренных мер 800. Срабатывает соленоидный вентиль 804, и закрывается газовый вентиль 805. Одновременно подается сигнал на секцию привода двери и другой двигатель 807 открывает дверь 808 или окно. Может быть также подан сигнал на секцию привода вентилятора 802, после чего включается двигатель вентилятора 803, чтобы скопившийся в помещении газ был выпущен для предотвращения возникновения огня. Когда обнаружено наличие утечки газа или нарушителя, светится сигнальная лампа 814, смонтированная на приемной секции 801, и одновременно звучит зуммер 815 или же может звучать записанный голос или синтезированная речь, извещая о ненормальном состоянии.
Ниже описана последовательность операций средства принятия экстренных мер со ссылками на чертежи 21(b) и 21(c). Следует заметить, что эта процедура может исполняться параллельно с другими мерами, описанными выше, подобными установлению экстренной телефонной связи, перелистыванию монитора, и т. д.
Когда робот R остановлен, при операции S1 выполняется проверка наличия каких-либо звуков. Если нет, то выполнение этой функции продолжается. При операции S2 осуществляется посылка ультразвуковой волны и прием ее отражения, и одновременно с этим обнаруживающие ультразвуковые волны и инфракрасные лучи датчики воспринимают инфракрасные лучи, испускаемые человеческим телом, т. д. При операциях S1 и S2, в случае обнаружения необычного звука и/или в случае обнаружения движения вперед или назад нарушителя и/или инфракрасных лучей, излучаемые человеческим телом, выполняется переход к операции S3, при которой устанавливается факт наличия нарушителя.
B случае отсутствия нарушителя, выполняется возврат к операции S3, при которой устанавливается факт наличия нарушителя. \\2 В случае отсутствия нарушителя, выполняется возврат к операции S1 и воспроизводится описанная выше операция. Когда присутствует нарушитель, выполняется переход к операции S4, при которой с выводного порта PORT 8 микрокомпьютера 30 подается сигнал, заставляющий передающий контроллер 32 передать сигнал о ненормальном состоянии через антенну, которая приводит в действие монитор M, средство автоматического управления связью и принимающую секцию 801. Таким образом, извещается пользователь, имеющий монитор M при себе, и одновременно выполняется автоматический набор телефонных номеров полицейского участка, пожарной части т. д., как описано выше. Одновременно, при операции S8 включаются сигнальная лампа 814 и зуммер 815 для подачи звукового сигнала для внешнего информирования под управлением принимающей секции 801 средства принятия экстренных мер 800. В любой точке после S 3 может работать соленоид 809, чтобы принудить секцию запуска двигателя 810 привести в действие двигатель 811, для того, чтобы опустить жалюзи 812, расположенные у окон или дверей, для поимки нарушителя и тем самым свести к минимуму повреждение. После выполнения этих операций, функция слежения за нарушителем завершается.
На фиг. 21(b) также показаны операции (S6, S7), которые относятся к обнаружению огня и/или дыма на территории. Эти операции одинаковы с операциями, описанными со ссылками на фиг. 2(d) и обозначенными S17 и S18, и поэтому не требуют дальнейших разъяснений.
На фиг. 21(c) изображен процесс управления обнаружением утечки газа. Микрокомпьютер 30, когда робот R остановлен, определяет наличие утечки газа при операции S13, как иллюстрирует фиг. 21 (d), и в случае отсутствия утечки газа повторяет операцию S13 и постоянно следит за тем, чтобы не было утечки. Если обнаружена утечка газа, сигнал поступает на входной порт PORT микрокомпьютера 30, по которому компьютер 30 устанавливает, что имеется утечка газа, и при операциях S14 и S15 с выходного порта микрокомпьютера 30 выдается сигнал, который включает передающий контролер 32, который в свою очередь передает сигнал об утечке газа через антенну и приводит в действие монитор M, средство автоматического управления связью и принимающую секцию 33 для извещения пользователя, который имеет при себе монитор M, и одновременно набрать автоматически телефонные номера полицейского участка и других подходящих служб. При операции S16 включается сигнальная лампа 814 и зуммер 815 для подачи звукового сигнала. Одновременно принимающая секция 801 принимает сигнал от выходного порта микрокомпьютера 30 и передающего контроллера 32, и при операции S17 срабатывает соленоид 804 и закрывает газовый вентиль, устраняя утечку газа. При операции S18 устанавливается факт закрытия газового вентиля, после чего происходит возврат к операции S17. Если газовый вентиль закрыт, соленоид 804 работает, чтобы запустить секцию 806 привода для открывания двери, которая задает двигателю вращение в направлении открытия окна или двери 808. При операции S20 после открытия двери 808 и т.п. секция запуска 802 двигателя вентилятора работает и запускает двигатель вентилятора 803, чтобы откачать газ наружу.
При откачивании газа наружу при операции S21 обнаруживающий утечку газа датчик 41 непрерывно определяет наличие утечки газа в помещении, если газ откачен, выполняется переход к операции S22, при которой секция привода двери 806 питает двигатель так, что он вращается в обратном направлении, закрывая окно или дверь 80. Если газ еще присутствует, происходит возврат к операции S17, при которой повторно выполняются процедуры останова утечки газа и его откачки. Хотя выше было сказано, что в случае проникновения нарушителя закрываются жалюзи, чтобы изолировать помещение, настоящее изобретение не ограничивается такой операцией и может включать в себя любое необходимое средство принятия экстренных мер.
При использовании робота, следящего за безопасностью, соответствующего настоящему изобретению, соленоид закрывает газовый открывающий-закрывающий вентиль для прекращения утечки газа и запускает двигатель, чтобы открыть окно или дверь, а затем запускает вентилятор, чтобы проветрить помещение. После вытягивания газа окно или дверь может быть закрыта. Поэтому исключается возможность удушения от утечки газа или пожара. \\2 Хотя выше описано подвижное контрольное устройство, имеющее первый и второй микрокомпьютеры, встроенные в робот, настоящее изобретение не ограничивается такой конструкцией и, например, может быть сконструировано так, чтобы работать только с одним микрокомпьютером, без отклонения от существа и объема изобретения.
Как сказано выше, настоящее изобретение имеет несколько признаков и преимуществ. В частности, благодаря набору секретного кодового номера после набора телефонного номера дома или офиса, находящегося под наблюдением (охраной), даже когда пользователь отсутствует, подвижным контрольным устройством можно управлять дистанционно. Дополнительно, поскольку нет надобности в кабелях, затраты на работу и установку, связанные с укладкой постоянной проводки, отсутствуют. Помимо этого, поскольку разнообразные обнаруживающие датчики установлены внутри робота, отсутствуют неприглядные признаки, обычно связанные с известной управляющей домашней безопасностью системой, датчики которой размещены в нескольких пунктах. Далее, поскольку нет надобности в обеспечении проводкой обнаруживающих датчиков, можно не беспокоиться, что посторонний или вор-взломщик перережет подобную проводку или разъединит питание датчиков. Подвижным контрольным устройством может управлять, если необходимо, любой зарегистрированный пользователь.
Реферат
Изобретение относится к подвижному контрольному устройству и позволяет обеспечить автономность питания и сигнализации. Подвижное контрольное устройство содержит самоходный подвижный робот, имеющий передающий контроллер, приемник, несколько чувствительных средств, навигационную систему для излучения ультразвуковых волн в прямом направлении и одновременного приема отраженных волн, первый микрокомпьютер для приема сигнала, характеризующего зону пространства, и определения направления, в котором следует перемещаться роботу, приводное средство для создания движущей силы для перемещения в прямом или в обратном направлениях руления, средство обнаружения поврежденной поверхности для оценки неисправного состояния несущей поверхности. Технический результат достигается благодаря тому, что содержит средство контроля для приема сигнала, переданного роботом, и оповещения зарегистрированного пользователя в случае обнаружения ненормального состояния и средство автоматического управления связью. Варианты этого устройства содержат средство обнаружения вторгающегося нарушителя, средство принятия экстренных мер и средство дистанционного управления роботом. 4 с. и 39 з.п. ф-лы, 51 ил.

Формула
10.07.91 по пп. 1 - 4, 11, 17, 19, 20, 26 - 33;
05.11.91 по пп.5 - 10, 12 - 16, 18, 21 - 25, 34 - 43.
Комментарии