Способ обработки сигнала, поступающего от датчика положения органа управления автотранспортного средства - RU2480638C2
Код документа: RU2480638C2
Чертежи
Описание
Настоящее изобретение относится к устройству обеспечения маневров автотранспортного средства на склоне и, в частности, к способу обработки сигнала положения органа управления транспортного средства, при этом сигнал положения используют в таком устройстве обеспечения.
Из документа FR 2828450, содержание которого цитируется в настоящей заявке в качестве ссылки, известно такое устройство обеспечения. В основном оно содержит средство оценки наклона склона, на котором установлено транспортное средство, средство для интерпретации действий водителя, средство для определения характеристической кривой сцепления транспортного средства (то есть кривой соответствия между положением педали сцепления и моментом, передаваемым сцеплением) и средство для автоматической деактивации средства торможения транспортного средства. Благодаря этим средствам автотранспортное средство можно удерживать в положении на склоне в состоянии, в котором ведущие колеса отключены от двигателя, и можно привести в движение (в направлении подъема склона) простыми действиями водителя на педали акселератора и сцепления (то есть при этом ему нет необходимости воздействовать на стояночный тормоз). Действительно, стратегия работы устройства обеспечения состоит в отключении торможения, как только крутящий момент, передаваемый на колеса, становится достаточным, чтобы компенсировать усилие, действующее на транспортное средство и связанное с крутизной склона и с силой тяжести.
Учитывая время реагирования, необходимое, чтобы тормозная система отключилась, используют не моментальное положение педали сцепления для определения момента, передаваемого сцеплением, а упреждающее положение педали сцепления, то есть оценку положения, которое будет занимать педаль сцепления в момент отключения торможения. Для вычисления этого упреждающего положения используют моментальную производную значения положения педали сцепления, которую умножают на заранее определенную постоянную времени, при этом результат суммируют с моментальным значением педали сцепления.
Устройство этого типа имеет свои недостатки. Оно не отличается высокой надежностью. Действительно, шум, присутствующий в сигнале, поступающем от датчика положения педали сцепления, может существенно повлиять на значение упреждающего положения педали сцепления. Эта помеха может привести к отключению системы торможения слишком рано или слишком поздно. Кроме того, в устройстве возникают проблемы при управлении быстрыми движениями педали сцепления.
Настоящее изобретение направлено на создание способа обработки сигнала положения педали сцепления, позволяющего устранить вышеуказанные недостатки и усовершенствовать известные способы определения. В частности, в соответствии с изобретением предложен способ определения, позволяющий избежать слишком раннего или слишком позднего отключения тормозной системы.
Согласно изобретению способ позволяет обработать сигнал, поступающий от датчика положения органа управления автотранспортного средства, предназначенный для получения обработанного сигнала положения органа управления. Он характеризуется тем, что содержит:
- фазу фильтрования первым фильтром сигнала, поступающего от датчика, для получения первого фильтрованного сигнала,
- фазу замещения, в которой в качестве обработанного сигнала выдают первый фильтрованный сигнал, к которому добавляют второй сигнал, если моментальное значение первого фильтрованного сигнала превышает значение первого порогового параметра, и в которой в противном случае в качестве обработанного сигнала выдают сигнал, поступающий от датчика.
Второй сигнал может являться функцией третьего сигнала, полученного фильтрованием при помощи второго фильтра сигнала, поступающего от датчика, затем дифференцированием по отношению к времени результирующего сигнала.
Второй сигнал может быть ограничен значениями второго параметра и третьего параметра.
Значения второго и третьего параметров могут быть противоположными.
Второй сигнал может быть получен путем умножения третьего сигнала на значение четвертого параметра.
Значение четвертого параметра может быть заранее определенной постоянной.
Значение четвертого параметра может быть переменным.
Значение первого параметра может быть заранее определенной постоянной.
Значение первого параметра может быть выведено из величины, характеристической для органа управления.
Носитель данных в соответствии с настоящим изобретением содержит алгоритм для применения вышеуказанного способа обработки.
Согласно изобретению устройство обработки сигнала, поступающего от датчика положения органа управления автотранспортного средства и предназначенного для получения обработанного сигнала положения органа управления, характеризуется тем, что содержит аппаратные и программные средства для применения вышеуказанного способа обработки.
Аппаратные средства могут содержать первый фильтр, второй фильтр, средства вычисления, запоминающее устройство и средства дифференцирования.
Согласно изобретению устройство обеспечения маневров автотранспортного средства на склоне содержит вышеуказанное устройство обработки.
Далее представлен вариант выполнения устройства обеспечения в соответствии с настоящим изобретением и вариант осуществления способа определения упреждающего положения педали сцепления в соответствии с настоящим изобретением.
Изобретение поясняется чертежами, на которых представлено следующее:
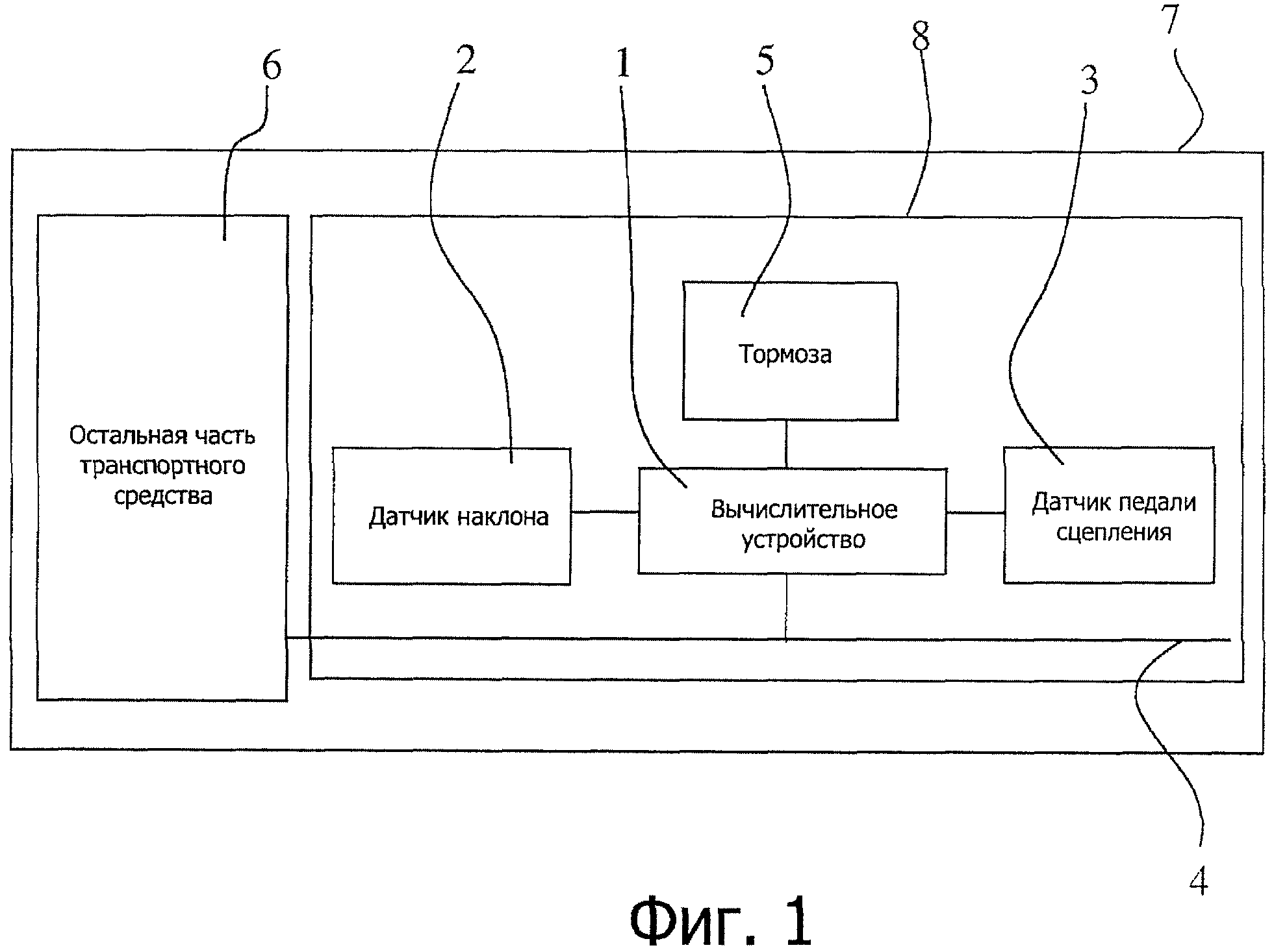
фиг.1 - схема транспортного средства, оборудованного устройством обеспечения в соответствии с настоящим изобретением;
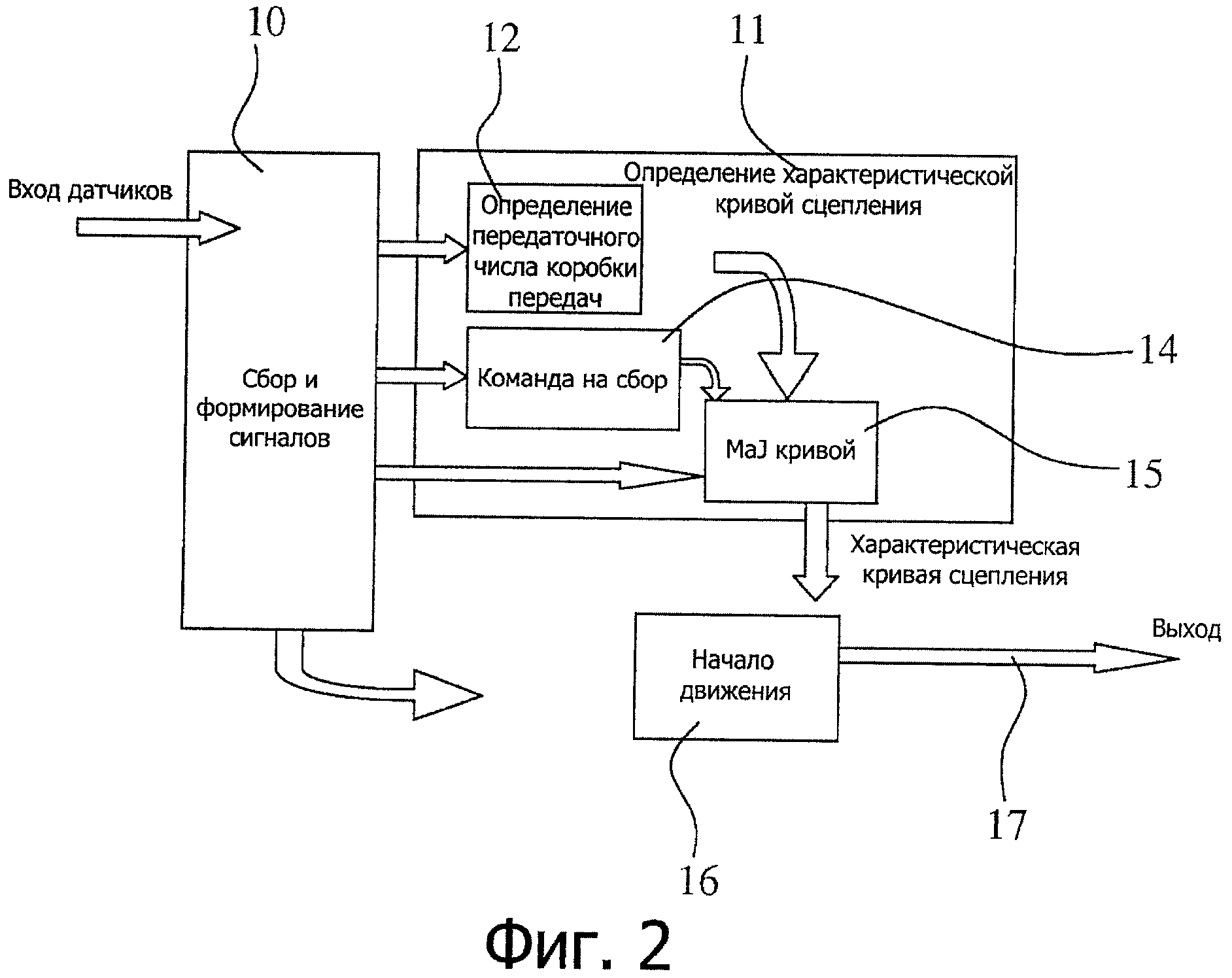
фиг.2 - блок-схема общей работы устройства обеспечения в соответствии с настоящим изобретением;
фиг.3 - блок-схема работы блока «начала движения», показанного на фиг.3;
фиг.4 - блок-схема варианта выполнения способа определения упреждающего положения педали сцепления в соответствии с настоящим изобретением.
Автотранспортное средство 7, показанное на фиг.1, содержит устройство 8 обеспечения маневров на склоне. Это устройство соединено с остальной частью 6 транспортного средства, с которой оно обменивается данными через коммуникационную шину CAN 4.
Устройство обеспечения в основном содержит:
- вычислительное устройство 1, соединенное с коммуникационной шиной CAN 4, и
- датчик 2 наклона склона, на котором находится транспортное средство, датчик положения педали сцепления и систему 5 стояночного тормоза, соединенные с вычислительным устройством.
Структура и работа устройства обеспечения подробно описаны в документе FR 2828450 - А1, страница 12, строка 23 - страница 33, строка 27, фиг.1-8.
В частности, его структура описана на странице 12, строка 23 - страница 16, строка 16 со ссылками на фиг.1 и 2 и на странице 20, строка 4 - страница 22, строка 23 со ссылками на фиг.4.
Система стояночного тормоза описана, в частности, на странице 14, строка 10 - страница 15, строка 11 вышеуказанного документа со ссылками на фиг.2.
Остальная часть транспортного средства содержит классические органы современного транспортного средства и, в частности, средства для определения и передачи данных транспортного средства, таких как режим двигателя, скорость или положение педали акселератора.
В остальной части описания будут использованы различные физические величины и их обозначения согласно нижеследующему списку:
Как было указано выше, двигатель транспортного средства массой m, находящегося на склоне θtilt, должен развить момент, превышающий пороговое значение CTseuil, чтобы заставить двигаться транспортное средство.
CTseuil=r(b)×ρwheels×m×g×sin(θtilt), где g является нормой поля земного притяжения.
Как было указано выше, согласно стратегии, используемой устройством обеспечения, тормозная система отключается после стоянки в фазе включения сцепления, как только оценочный момент, передаваемый сцеплением, превышает момент CTseuil. Сложность операции, совершаемой устройством обеспечения, состоит в этой оценке передаваемого момента. Для этого устройство обеспечения использует, в частности, информацию об упреждающем положении педали сцепления и характеристическую кривую сцепления.
Общая работа устройства обеспечения описана ниже со ссылками на фиг.2.
В первом функциональном блоке 10 получают и формируют сигналы, поступающие от различных датчиков, которыми оборудовано транспортное средство. Эти сигналы передаются, в частности, через коммуникационную шину CAN.
Во втором функциональном блоке 11 определяют характеристическую кривую сцепления. Этот блок содержит:
- субблок 12, в котором определяют выбранное передаточное число коробки передач,
- субблок 14, в котором получают данные, в частности, о положении педали сцепления и о передаваемом сцеплением моменте, и
- субблок 15, в котором используют данные от блока 10 и субблоков 12 и 14 для обновления характеристической кривой сцепления.
В третьем функциональном блоке 16 используют характеристическую кривую сцепления, определенную в блоке 11, и данные блока 10 для определения состояния, которое должен занимать выход 17, управляющий отключением системы стояночного тормоза.
Структура блоков 10 и 11 и их работа идентичны описанным в публикации заявки FR 2828450-A1.
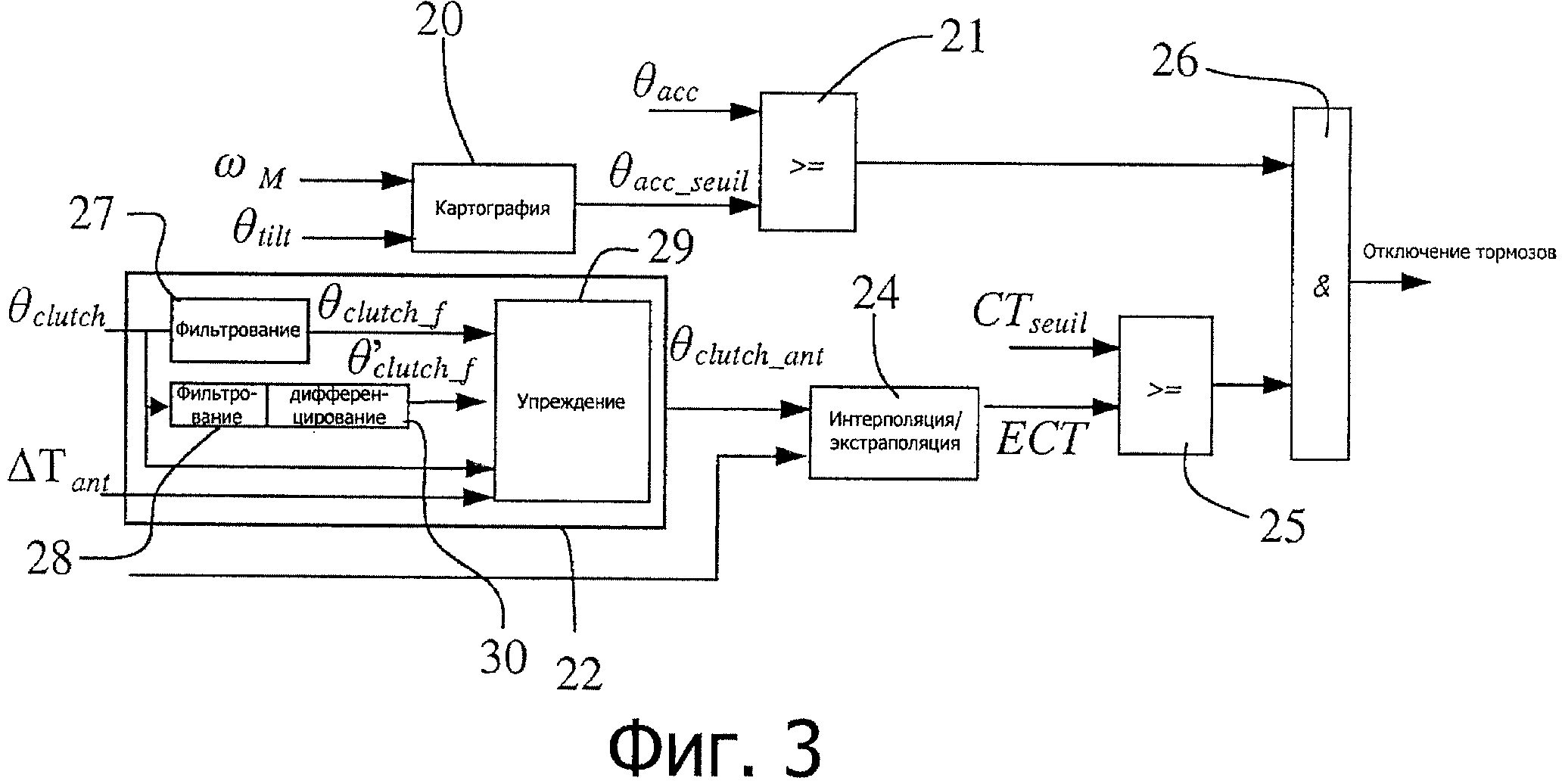
Далее со ссылками на фиг.3 следует описание работы этого третьего функционального блока 16.
В первом компараторе 20 в зависимости от режима двигателя и от наклона склона, на котором установлено транспортное средство, получают пороговое значение педали акселератора, ниже которого не должна подаваться команда на отключение тормозной системы. Это пороговое значение определяют при помощи картографии, то есть в памяти устройства обеспечения записаны данные, позволяющие привести в размерное соответствие пороговое значение для значений режима двигателя на оси абсцисс и наклона на оси ординат.
В компараторе 21 сравнивают моментальное положение педали акселератора θасс с пороговым значением, установленным на выходе блока 20. Если моментальное значение положения педали акселератора превышает пороговое значение, установленное на выходе компаратора 20, выход компаратора 21 активируется или переходит в верхнее состояние.
В устройстве 22 обработки сигнала используют данные положения педали сцепления и временного параметра ΔTant для получения на выходе сигнала упреждающего положения педали сцепления

Для этого сигнал положения θclutch, поступающий от датчика 3 положения педали сцепления, направляют в первый фильтр 27. Этот первый фильтр является фильтром нижних частот. Используя, например, фильтр первого порядка, можно зафиксировать постоянную времени в значении 0,03 секунды. На выходе первого фильтра получают фильтрованный сигнал положения

Сигнал положения Gclutch, поступающий от датчика 3 положения педали сцепления, можно также направить во второй фильтр 28. Этот второй фильтр является фильтром низких частот. Используя, например, фильтр первого порядка, можно зафиксировать постоянную времени в значении 0,05 секунды. Граничная частота первого фильтра может, например, составлять 10 Гц, и ее можно параметризовать во время установки системы. На выходе второго фильтра получают фильтрованный сигнал, который поступает в средство 30 дифференцирования. Сигнал, полученный от средства дифференцирования, является сигналом производной фильтрованного положения педали сцепления, обозначаемым

Вышеуказанные полученные два сигнала, а также сигнал, поступивший от датчика положения педали сцепления, и значение временного параметра ΔTant направляют в средство 29 вычисления, в котором осуществляют ряд математических операций (которые будут подробнее описаны ниже) на сигналах для получения сигнала упреждающего положения педали сцепления
Наиболее простым примером реализации фильтров низких частот является использование пассивных монтажных схем с последовательно соединенными резистором и конденсатором, при этом предназначенный для фильтрования сигнал подается на контакты последовательной монтажной схемы, и фильтрованный сигнал получают на контактах конденсатора. Возможна также цифровая реализация фильтра первого порядка, например:

где Ts - период дискретизации, и t - постоянная времени фильтра.
Средство 30 можно реализовать при помощи такого же типа монтажа, при этом предназначенный для дифференцирования сигнал подается на контакты последовательной монтажной схемы, и дифференцированный сигнал получают на контактах резистора. Возможна также цифровая реализация, например,
Y(K)=[Х(К)-Х(К-n)]/nTs,
где Ts - период дискретизации, n - число элементов для дифференцирования.
Различные фильтры, средство дифференцирования и средство вычисления могут находиться в одном электронном компоненте, таком, в частности, как вычислительное устройство 1 устройства 8 обеспечения.
В средстве 24 интерполяции/экстраполяции используют характеристическую кривую сцепления и упреждающее положение педали сцепления для получения, путем интерполяции или экстраполяции, оценки значения момента ЕСТ, передаваемого сцеплением.
Это оценочное значение момента сравнивают в компараторе 25 с моментом CTseuil, необходимым для приведения в движение транспортного средства. Если оценочное значение момента, передаваемого на сцепление, превышает момент CTseuil, необходимый для приведения в движение транспортного средства, выход компаратора 25 является активным или в верхнем состоянии.
Выходы компараторов 21 и 25 выходят на логический порт ЕТ 26, управляющий на выходе отключением тормозной системы, когда она является активной или в верхнем состоянии.
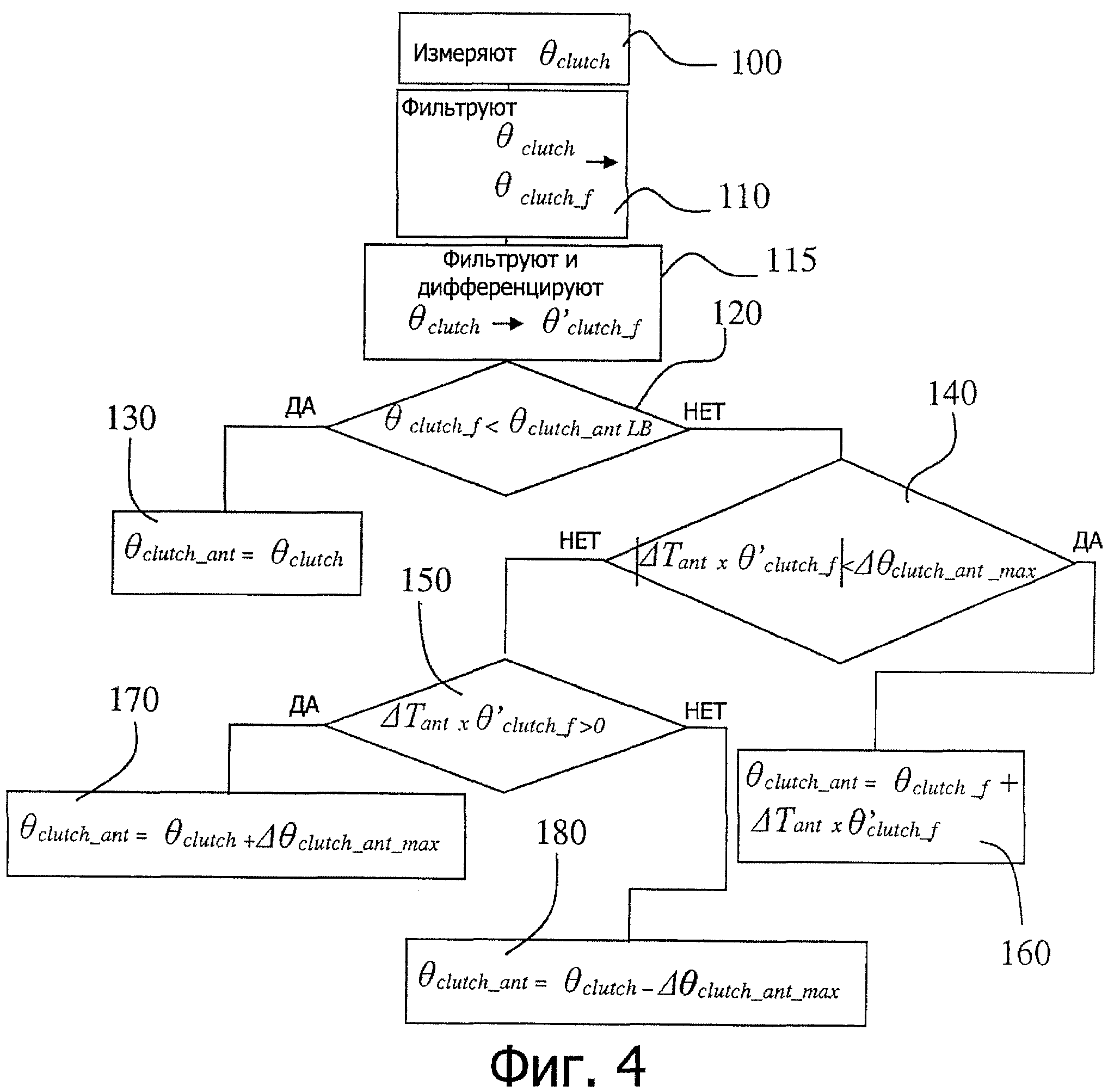
Далее со ссылками на фиг.4 следует описание примера осуществления способа обработки в соответствии с настоящим изобретением.
На первом этапе 100 при помощи датчика 3 определяют сигнал положения θclutch педали сцепления.
На втором этапе 110 этот сигнал фильтруют при помощи фильтра 27 для получения фильтрованного сигнала положения
На третьем этапе 115 сигнал положения θclutch фильтруют при помощи фильтра 28, затем дифференцируют для получения фильтрованного и дифференцированного сигнала

Все эти сигналы направляют в средство 29 вычисления и на этапе 120 проверяют, является ли моментальное значение фильтрованного сигнала
На этом этапе 140 проверяют, является ли абсолютное значение произведения значения временного параметра ΔTant на моментальное значение фильтрованного и дифференцированного сигнала положения



В противном случае переходят к этапу 150.
На этом этапе 150 проверяют, является ли произведение значения временного параметра ΔTant на моментальное значение фильтрованного и дифференцированного сигнала положения

средство вычисления выдает на выходе сумму сигнала θclutch и значения параметра

В противном случае переходят к этапу 180, на котором в качестве сигнала упреждающего положения педали сцепления

Значения различных вышеупомянутых параметров сохраняются в памяти устройства обеспечения, например, в запоминающем устройстве вычислительного устройства 1. Значения этих параметров могут быть постоянными и заранее определенными. В альтернативном варианте выполнения они могут быть переменными и определенными, в частности, в зависимости от ситуации, в которой находится транспортное средство.
Таким образом, параметр


Значения параметров
Такой способ обработки обеспечивает надежную оценку значения упреждающего положения педали сцепления. Это значение практически не подвержено влиянию различных помех, и система торможения может отключаться в нужный момент.
Реферат
Группа изобретений относится к технике обеспечения маневров автотранспортного средства на склоне. Предложенный способ обработки сигнала (θ), поступающего от датчика положения органа управления автотранспортного средства и предназначенного для получения обработанного сигнала (θ) положения органа управления, характеризуется тем, что содержит фазу фильтрования первым фильтром сигнала, поступающего от датчика, для получения первого фильтрованного сигнала (θ) и фазу замещения, в которой в качестве обработанного сигнала выдают первый обработанный сигнал. К первому сигналу добавляют второй сигнал, если мгновенное значение первого фильтрованного сигнала превышает значение первого порогового параметра (θ). В противном случае в качестве обработанного сигнала выдают сигнал, поступающий от датчика. Предложенное устройство содержит аппаратные и программные средства для применения данного способа. Группа изобретений позволяет исключить слишком раннее и слишком позднее отключение органа управления, например тормозной системы. 3 н. и 9 з.п. ф-лы, 4 ил.
Формула

фазу фильтрования первым фильтром (27) сигнала, поступающего от датчика, для получения первого фильтрованного сигнала (

фазу замещения, в которой в качестве обработанного сигнала выдают первый обработанный сигнал, к которому добавляют второй сигнал, если мгновенное значение первого фильтрованного сигнала превышает значение первого порогового параметра (


Документы, цитированные в отчёте о поиске
Оптический носитель записи, устройство и способ записи-воспроизведения, способ инициализации и способ повторной инициализации
Комментарии