Устройство передачи отклонения транспортного средства - RU2662581C2
Код документа: RU2662581C2
Чертежи












Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству передачи отклонения транспортного средства.
Уровень техники
[0002] Традиционно известна технология, в которой светоизлучающий модуль располагается на руле и принудительно излучает свет для того, чтобы представлять информацию, когда окружающие условия определяются как опасные (см., например, патентный документ 1).
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2009-18722
[0004] В последние годы разрабатываются транспортные средства с поддержкой автоматизированного вождения, которые допускают автоматическое управление отклонением транспортного средства. В частности, желательно, чтобы транспортное средство с поддержкой автоматизированного вождения представляло заранее отклонение транспортного средства, которое возникает в ходе управления автоматизированным вождением, таким образом, чтобы предоставлять возможность находящемуся в транспортном средстве человеку легко и интуитивно понимать отклонение транспортного средства. Тем не менее, способ, описанный в патентном документе 1, не допускает представление заранее отклонения транспортного средства, которое возникает в ходе управления автоматизированным вождением, находящемуся в транспортном средстве человеку. Кроме того, информация, представленная посредством излучения светоизлучающего модуля и позиции излучения на руле, является нерелевантной. Следовательно, возникает такая проблема, что водителю затруднительно понимать интуитивно представленную информацию.
Сущность изобретения
[0005] С учетом вышеописанной проблемы, цель настоящего изобретения заключается в том, чтобы предоставлять устройство передачи отклонения транспортного средства, которое допускает представление заранее отклонения транспортного средства таким образом, чтобы предоставлять возможность находящемуся в транспортном средстве человеку легко и интуитивно понимать отклонение транспортного средства, которое возникает в ходе управления автоматизированным вождением.
[0006] Согласно аспекту настоящего изобретения, устройство передачи отклонения транспортного средства в транспортном средстве с поддержкой автоматизированного вождения, допускающем автоматическое управление отклонением транспортного средства, указывает направление, в котором возникает отклонение транспортного средства, посредством вычисления отклонения транспортного средства в ходе управления автоматизированным вождением, определения шаблона излучения согласно вычисленному отклонению транспортного средства и вынуждения источников света, расположенных на руле, излучать свет согласно шаблону излучения.
[0007] Согласно другому аспекту настоящего изобретения, устройство передачи отклонения транспортного средства в транспортном средстве с поддержкой автоматизированного вождения, допускающем автоматическое управление отклонением транспортного средства, допускает свободное управление взаимосвязью между углом поворота поворотного колеса и углом поворота руля при рулении и указывает направление, в котором возникает отклонение транспортного средства, посредством вычисления отклонения транспортного средства в ходе управления автоматизированным вождением, определения шаблона поворота руля согласно вычисленному отклонению транспортного средства и вынуждения поворачивать руль в определенном шаблоне поворота.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей пример устройства передачи отклонения транспортного средства согласно первому варианту осуществления настоящего изобретения.
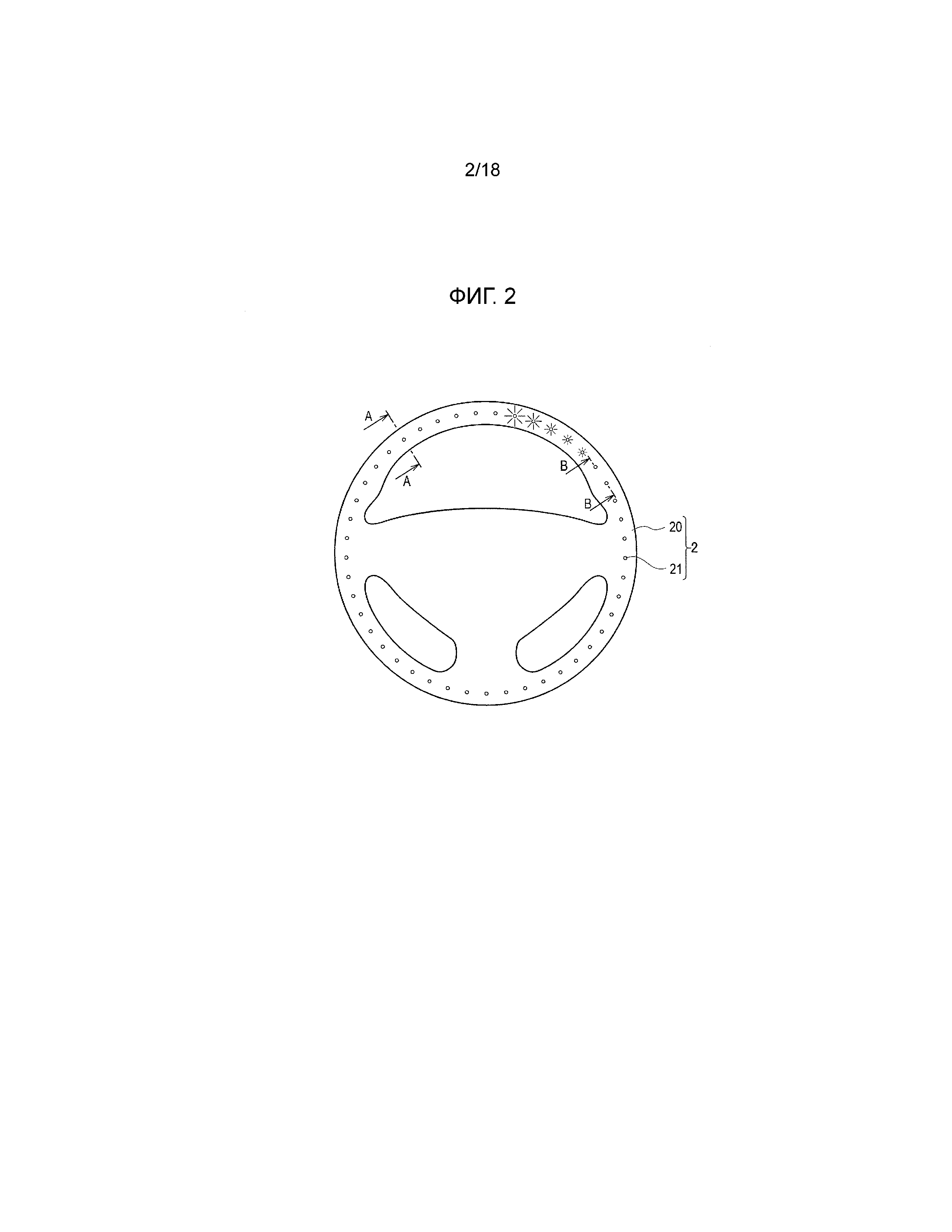
Фиг. 2 является принципиальной схемой, иллюстрирующей пример модуля указания согласно первому варианту осуществления настоящего изобретения.
Фиг. 3(a) является видом в поперечном сечении вдоль направления A-A на фиг. 2, и фиг. 3(b) является видом в поперечном сечении вдоль направления B-B на фиг. 2.
Фиг. 4(a) является другим видом в поперечном сечении вдоль направления A-A на фиг. 2, и фиг. 4(b) является другим видом в поперечном сечении вдоль направления B-B на фиг. 2.
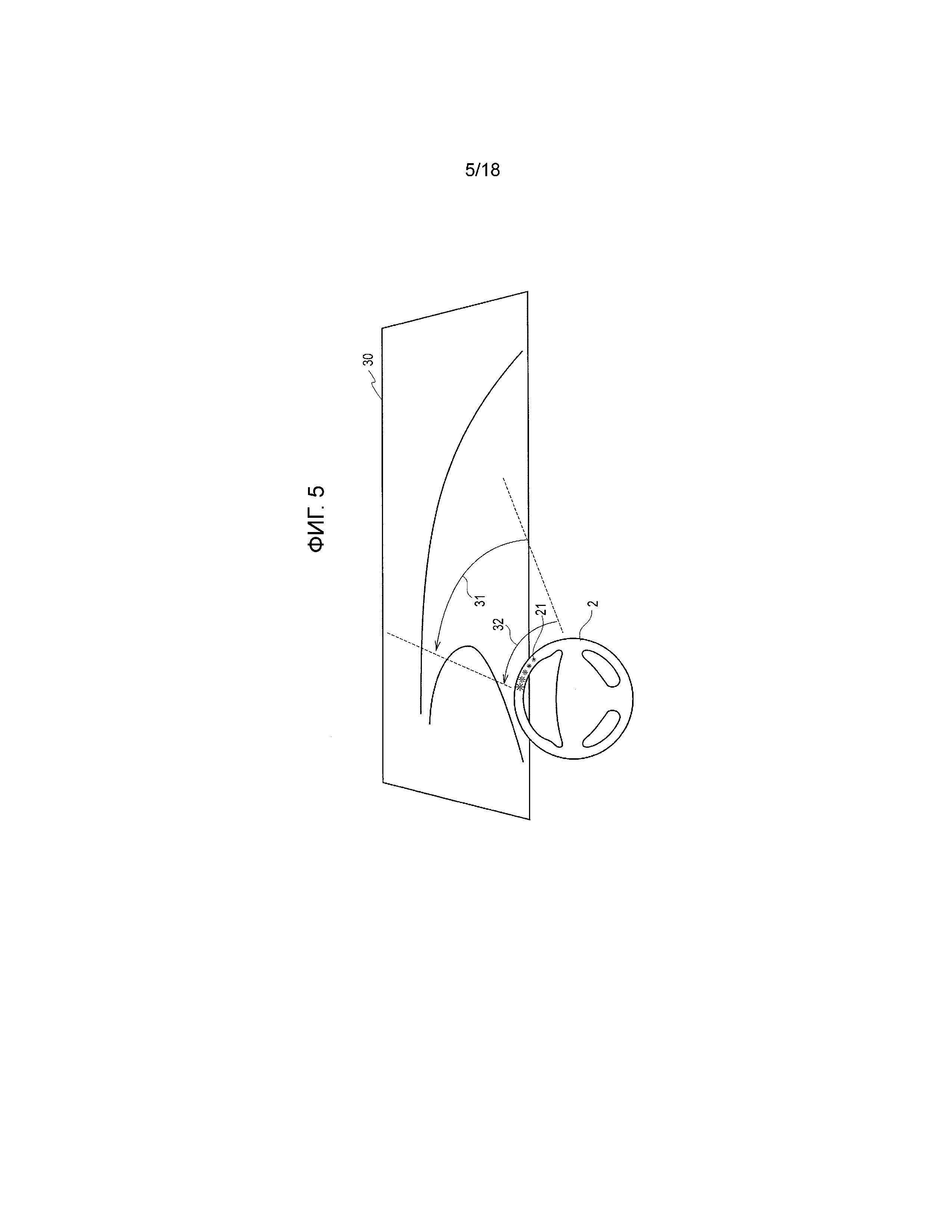
Фиг. 5 является принципиальной схемой для иллюстрации примера способа передачи отклонения транспортного средства согласно первому варианту осуществления настоящего изобретения.
Фиг. 6(a) является видом сверху транспортного средства и его окрестности для иллюстрации примера способа передачи отклонения транспортного средства согласно первому варианту осуществления настоящего изобретения, и фиг. 6(b) является видом сбоку транспортного средства и его окрестности для иллюстрации примера способа передачи отклонения транспортного средства согласно первому варианту осуществления настоящего изобретения.
Фиг. 7 является принципиальной схемой для иллюстрации примера способа передачи отклонения транспортного средства согласно первому варианту осуществления настоящего изобретения.
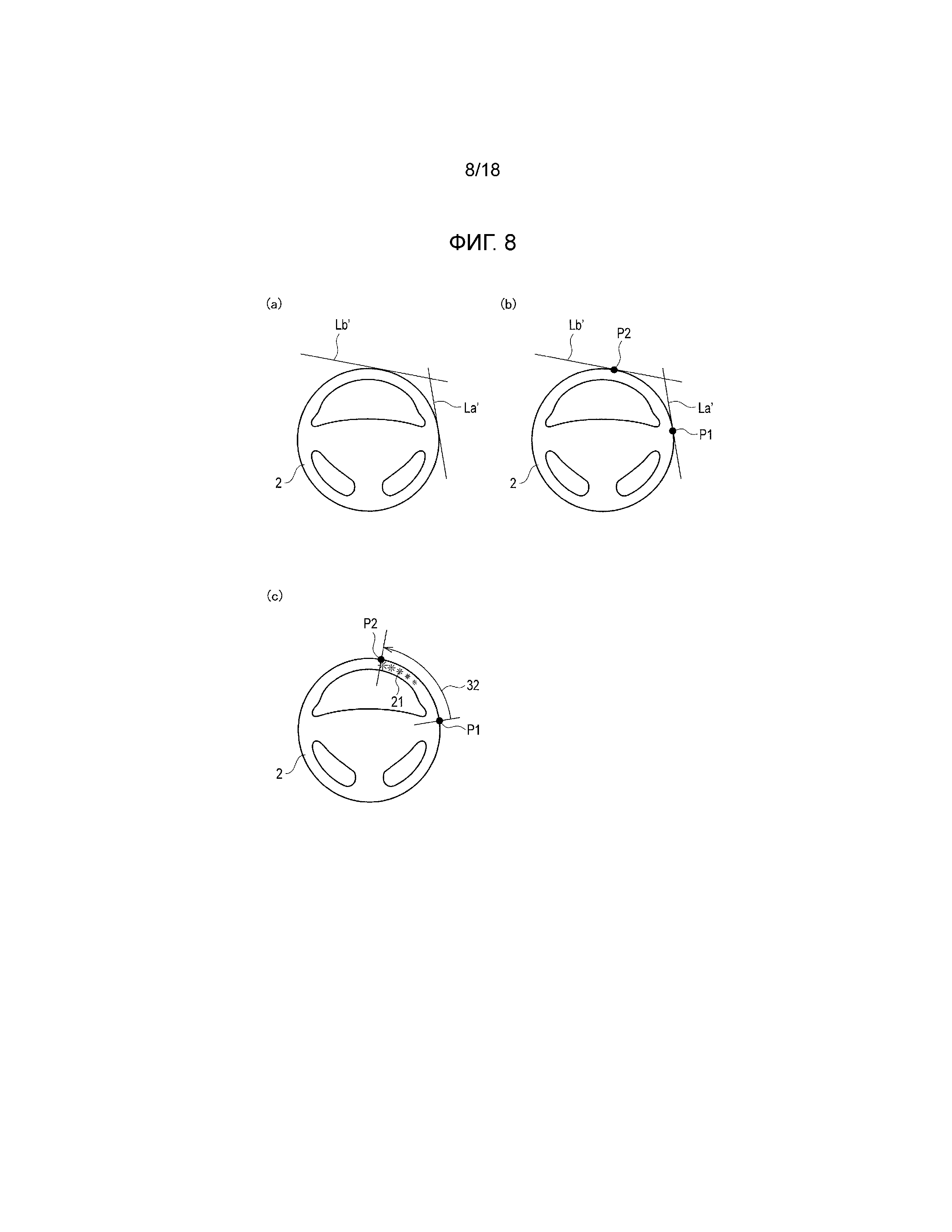
Фиг. 8(a)-8(c) являются принципиальными схемами для иллюстрации примера способа передачи отклонения транспортного средства согласно первому варианту осуществления настоящего изобретения.
Фиг. 9(a)-9(c) являются принципиальными схемами для иллюстрации другого примера способа передачи отклонения транспортного средства согласно первому варианту осуществления настоящего изобретения.
Фиг. 10(a) и фиг. 10(b) являются принципиальными схемами, иллюстрирующими другой пример модуля указания согласно первому варианту осуществления настоящего изобретения.
Фиг. 11 является принципиальной схемой для иллюстрации способа компенсации угла поворота руля согласно первому варианту осуществления настоящего изобретения.
Фиг. 12 является блок-схемой последовательности операций для иллюстрации примера способа передачи отклонения транспортного средства согласно первому варианту осуществления настоящего изобретения.
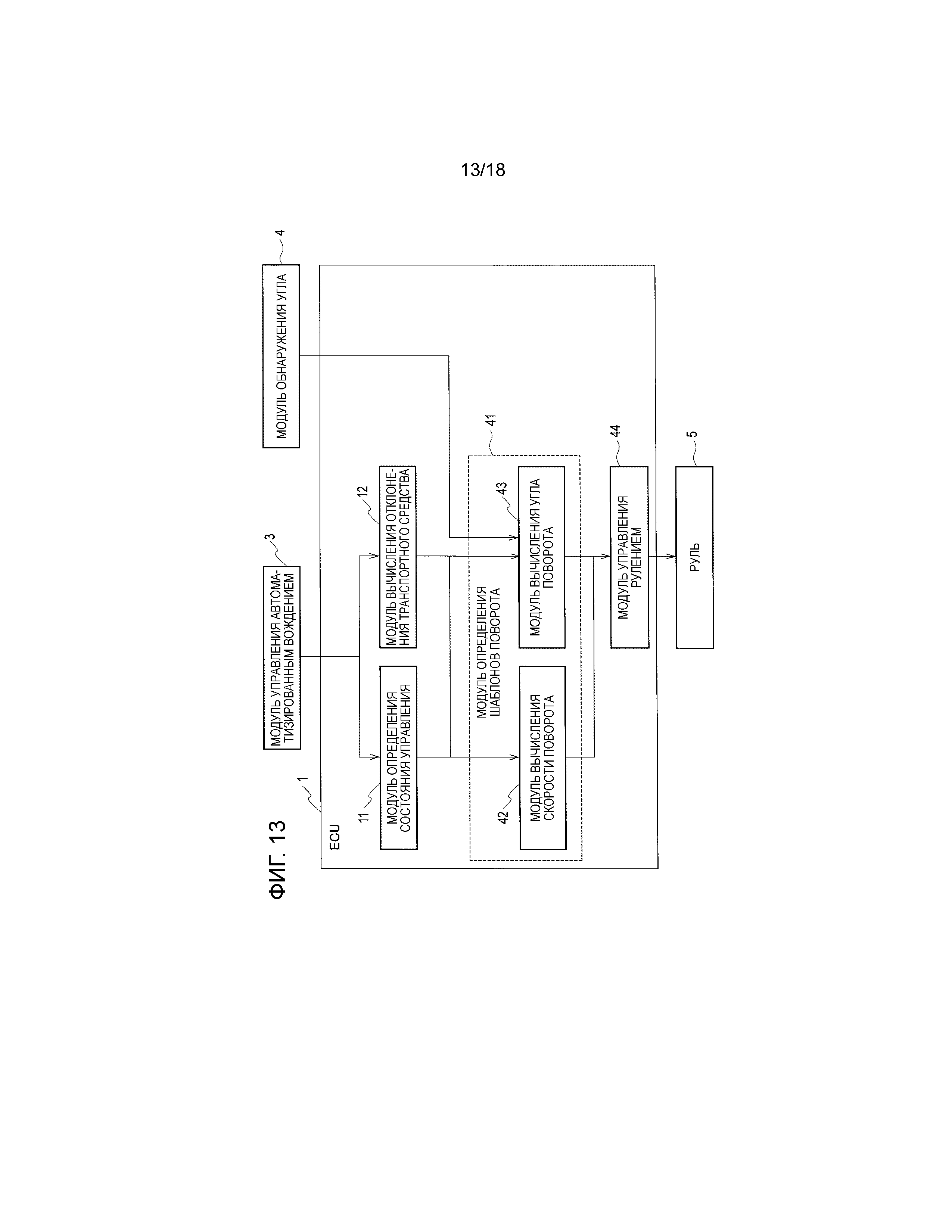
Фиг. 13 является блок-схемой, иллюстрирующей пример устройства передачи отклонения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 14 является принципиальной схемой для иллюстрации примера способа передачи отклонения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 15(a)-15(c) являются принципиальными схемами для иллюстрации примера способа передачи отклонения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 16(a) и фиг. 16(b) являются принципиальными схемами для иллюстрации другого примера способа передачи отклонения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 17 является принципиальной схемой для иллюстрации примера способа передачи отклонения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 18 является блок-схемой последовательности операций для иллюстрации примера способа передачи отклонения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Далее описываются первый и второй варианты осуществления настоящего изобретения со ссылками на прилагаемые чертежи. В нижеприведенном описании чертежей, идентичные или аналогичные части помечаются идентичными или аналогичными ссылочными позициями.
[0010] Первый вариант осуществления
Устройство передачи отклонения транспортного средства согласно первому варианту осуществления настоящего изобретения является применимым к транспортным средствам с поддержкой автоматизированного вождения, которые допускают автоматическое управление отклонением транспортного средства. Как показано на фиг. 1, устройство передачи отклонения транспортного средства согласно первому варианту осуществления настоящего изобретения содержит модуль 1 управления двигателем (ECU), модуль 2 указания (руль), модуль 3 управления автоматизированным вождением и модуль 4 обнаружения угла.
[0011] Как показано на фиг. 2, модуль 2 указания включает в себя участок 20 для захвата, который представляет собой внешний периферийный участок руля 2, и источники 21 света, расположенные на участке 20 для захвата. Источники 21 света представляют собой, например, несколько светоизлучающих элементов. Линия точечных источников света формируется посредством размещения нескольких светоизлучающих элементов в ряд на участке 20 для захвата. Модуль 2 указания указывает отклонение транспортного средства находящемуся в транспортном средстве человеку посредством вынуждения источников 21 света (светоизлучающих элементов) излучать свет в светоизлучающем шаблоне, соответствующем отклонению транспортного средства в ходе управления автоматизированным вождением. Светоизлучающие диоды (светодиоды) и т.п. доступны в качестве светоизлучающих элементов 21. Типы, размеры, число и т.п. светоизлучающих элементов 21 не ограничены конкретным образом. Расположение большого числа светоизлучающих элементов 21 предоставляет возможность находящемуся в транспортном средстве человеку визуально распознавать светоизлучающие точки, как если светоизлучающая точка (светоизлучающая часть) перемещается непрерывно.
[0012] В модуле 2 указания, например, светоизлучающие элементы 21 располагаются на опорном элементе 22, и рассеивающий элемент 23 располагается таким образом, что он покрывает светоизлучающие элементы 21, как показано на фиг. 3(a) и фиг. 3(b). Когда свет, излучаемый из смежных светоизлучающих элементов 21, падает на рассеивающий элемент 23, свет рассеивается и смешивается. Как результат, становится просто предоставлять возможность находящемуся в транспортном средстве человеку визуально распознавать светоизлучающие точки, как если светоизлучающая точка перемещается непрерывно.
[0013] Кроме того, в модуле 2 указания, светоизлучающие элементы 21 могут располагаться внутри опорного участка 22, и может быть обеспечен отражатель 24, который отражает свет, излучаемый из светоизлучающих элементов 21, так что свет, излучаемый из светоизлучающих элементов 21, не должен проходить непосредственно к находящемуся в транспортном средстве человеку, как показано на фиг. 4(a) и фиг. 4(b). Можно смешивать между собой свет, излучаемый из смежных светоизлучающих элементов 21, посредством использования материала, который рассеивает свет, в качестве отражателя 24. Свет, отражаемый посредством отражателя 24, излучается через щель 25. Следовательно, можно формировать свет с низкой пространственной частотой, видимость которой не уменьшается в периферийном виде. Помимо этого, перемещение светоизлучающих точек становится плавным, и за счет этого находящемуся в транспортном средстве человеку предоставляется возможность визуально распознавать перемещение в качестве перемещения одной светоизлучающей точки.
[0014] Модуль 3 управления автоматизированным вождением формируется из ECU и т.п. и управляет автоматизированным вождением на основе плана движения. Модуль 3 управления автоматизированным вождением выводит план движения (маршрут движения) в ECU 1.
[0015] ECU 1, показанный на фиг. 1, формируется из микроконтроллера, содержащего центральный процессор (CPU), запоминающее устройство и модуль ввода-вывода, и формирует несколько информационных процессоров, которые выступают в качестве устройств передачи отклонения транспортного средства посредством выполнения предварительно установленной компьютерной программы. Несколько информационных процессоров ECU 1 включают в себя модуль 11 определения состояния управления, модуль 12 вычисления отклонения транспортного средства, модуль 13 определения шаблонов излучения и модуль 17 управления излучением.
[0016] Модуль 11 определения состояния управления определяет, представляет ли текущее состояние управления транспортным средством собой управление автоматизированным вождением или нет (вождение вручную), на основе вывода модуля 3 управления автоматизированным вождением, состояния захвата руля и т.п. На основе плана движения, выведенного посредством модуля 3 управления автоматизированным вождением, модуль 12 вычисления отклонения транспортного средства вычисляет отклонение транспортного средства в ходе управления автоматизированным вождением, которое возникает в интервале от текущего момента до времени после истечения предварительно определенного периода времени (например, после трех-семи секунд).
[0017] Модуль 13 определения шаблонов излучения определяет шаблон излучения источников 21 света, соответствующих отклонению транспортного средства, вычисленному посредством модуля 12 вычисления отклонения транспортного средства. Модуль 13 определения шаблонов излучения включает в себя модуль 14 вычисления направления перемещения, модуль 15 вычисления цветов излучения света и модуль 16 вычисления позиций излучения света. Модуль 14 вычисления направления перемещения вычисляет направление перемещения светоизлучающих точек согласно отклонению транспортного средства. Модуль 15 вычисления цветов излучения света вычисляет цвет излучения света светоизлучающих точек согласно отклонению транспортного средства. Модуль 16 вычисления позиций излучения света вычисляет позиции излучения света (диапазон излучения света) светоизлучающих точек на руле 2 согласно отклонению транспортного средства.
[0018] Модуль 17 управления излучением заставляет светоизлучающие элементы 21 излучать свет в шаблоне излучения, определенном посредством модуля 13 определения шаблонов излучения, и за счет этого указывает направление, в котором возникает отклонение транспортного средства. Например, как показано на фиг. 5, когда маршрут 31 для отклонения транспортного средства представляет собой изгиб влево, светоизлучающие точки светоизлучающих элементов 21 указывают таким образом, что светоизлучающие точки перемещаются в направлении, показанном стрелкой 32 (от правой стороны к левой стороне).
[0019] Далее описывается один пример способа определения шаблона излучения согласно первому варианту осуществления настоящего изобретения. Во-первых, как показано на фиг. 6(a) и фиг. 6(b), модуль 12 вычисления отклонения транспортного средства проецирует маршрут движения на поверхность дороги и оценивает будущую траекторию 31 транспортного средства центра массы транспортного средства 10, которая начинается с точки PA (в дальнейшем также называемой "начальной точкой") на поверхности дороги впереди транспортного средства 10, которая может быть визуально распознана из точки обзора находящегося в транспортном средстве человека и является ближайшей к находящемуся в транспортном средстве человеку, и заканчивается в точке PB (в дальнейшем также называемой "конечной точкой"), сдвинутой относительно PA после предварительно определенного периода времени. Как показано на фиг. 6(a) и фиг. 6(b), пусть обращенное вперед направление транспортного средства является осью X, а направление влево является осью Y, и обозначим посредством θAB угол, сформированный между осью X и линией Lab, соединяющей начальную точку м и конечную точку PB на поверхности дороги, посредством θA угол, сформированный между осью X и касательной линией La к будущей траектории 31 транспортного средства в точке PA, и посредством θB угол, сформированный между осью X и касательной линией Lb к будущей траектории 31 транспортного средства в точке PB.
[0020] Модуль 16 вычисления позиций излучения света формирует взаимосвязь отображения, чтобы представлять отклонение транспортного средства, наблюдаемое из точки обзора находящегося в транспортном средстве человека, посредством проецирования, на поверхность S1 параллельно рулю 2, будущей траектории 31 транспортного средства в качестве отклонения транспортного средства, вычисленного посредством модуля 12 вычисления отклонения транспортного средства. Здесь, обозначим посредством α угол, сформированный между поверхностью дороги и поверхностью S1 параллельно рулю 2. Затем, углы θ'AB, θ'A и θ'B, соответственно, сформированные посредством линии Lab и касательных линий La и Lb, проецируемых на поверхность S1, получаются с помощью нижеприведенных формул (1)-(3):
Математическое выражение 1

[0021] Между тем, модуль 16 вычисления позиций излучения света может допускать проецирование будущей траектории 31 транспортного средства на сферическую поверхность, центр которой представляет собой позицию точки обзора находящегося в транспортном средстве человека. В этом случае, углы θ'AB, θ'A и θ'B получаются с помощью нижеприведенных формул (4)-(6), на которых меньший угол из начальной точки PA обозначается посредством βA, меньший угол из конечной точки PB посредством βB, и угол открытия в конечной точке PB посредством δ. В силу этого, может определяться диапазон излучения света световых точек.
Математическое выражение 2

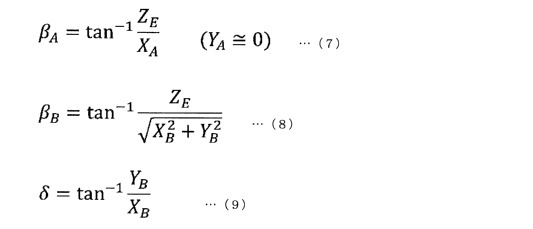
[0022] Здесь, меньший угол βA из начальной точки PA, меньший угол βB из конечной точки PB и угол δ открытия в конечной точке PB представлены посредством нижеприведенных формул (7)-(9), соответственно, на которых позиционные координаты начальной точки PA составляют (XA, YA), позиционные координаты конечной точки PB составляют (XB, YB), и высота позиции точки обзора находящегося в транспортном средстве человека составляет ZE:
Математическое выражение 3
[0023] Как показано на фиг. 7, модуль 16 вычисления позиций излучения света наносит касательные линии La и Lb, например, соответственно, через начальную точку PA и конечную точку PB на будущей траектории 31 транспортного средства, которая проецируется на поверхность S1 параллельно рулю 2. Помимо этого, модуль 16 вычисления позиций излучения света параллельно переносит касательные линии La и Lb таким образом, что две линии контактируют с внешней периферией руля 2. Далее, пусть перенесенные линии являются La' и Lb', как показано на фиг. 8(a), и мы получаем контактные точки P1 и P2 касательных линий La' и Lb', соответственно, как показано на фиг. 8(b). После этого, как показано на фиг. 8(c), модуль 16 вычисления позиций излучения света обозначает диапазон между двумя контактными точками P1 и P2 в качестве позиции перемещения светоизлучающих точек. Кроме того, как показано на фиг. 8(c), модуль 14 вычисления направления перемещения обозначает направление перемещения светоизлучающих точек в качестве направления 32 от контактной точки P1 к контактной точке P2, так что направление перемещения совмещается с направлением, в котором возникает отклонение транспортного средства.
[0024] Предположим, что центр руля 2 представляет собой позицию рассматриваемого транспортного средства, и верхний конец руля 2 представляет собой направление движения по прямой линии. Когда шаблон излучения определяется, как показано на фиг. 8(a)-8(c), можно представлять взаимосвязь между перемещением светоизлучающих точек и относительным отклонением транспортного средства, наблюдаемым от находящегося в транспортном средстве человека, таким образом, чтобы предоставлять возможность находящемуся в транспортном средстве человеку легко и интуитивно понимать отклонение транспортного средства посредством принудительного излучения света посредством светоизлучающих точек, соответствующих направлению движения. Помимо этого, чем больше абсолютные величины угловой скорости относительно вертикальной оси и поперечного ускорения, тем длиннее диапазон излучения. Следовательно, можно представлять абсолютные величины угловой скорости относительно вертикальной оси и поперечного ускорения с использованием длины диапазона излучения.
[0025] Кроме того, можно представлять скорость транспортного средства посредством постепенного изменения скорости перемещения светоизлучающих точек, в зависимости от скорости транспортного средства. Например, по мере того, как скорость транспортного средства становится большей, скорость перемещения (скорость мигания) светоизлучающих точек может становиться выше. Альтернативно, модуль 15 вычисления цветов излучения света может представлять скорость транспортного средства посредством постепенного изменения цвета излучения света в зависимости от скорости транспортного средства, например, посредством изменения цвета излучения света светоизлучающих точек на синий, желтый и красный цвет по мере того, как скорость транспортного средства становится большей. В силу этого, можно передавать два или более наборов информации находящемуся в транспортном средстве человеку, таких как абсолютные величины угловой скорости относительно вертикальной оси и поперечного ускорения и скорости транспортного средства, в дополнение к направлению, в котором возникает отклонение транспортного средства.
[0026] Между тем, ниже описывается другой пример способа определения позиций излучения света светоизлучающих точек посредством модуля 16 вычисления позиций излучения света. Как показано на фиг. 7, касательная линия Lb наносится через самую дальнюю точку PB на будущей траектории 31 транспортного средства, которая проецируется на поверхность S1 параллельно рулю 2. Касательная линия Lb параллельно переносится таким образом, что она контактирует с внешней периферией руля 2, и затем обозначается посредством касательной линии Lb', как показано на фиг. 9(a). Контактная точка P2 получается так, как показано на фиг. 9(b). Как показано на фиг. 9(c), шаблон излучения определяется таким образом, что светоизлучающие точки перемещаются в предварительно определенном диапазоне между начальными точками P3 и конечной точкой P4, имеющем контактную точку P2 в качестве центра.
[0027] Шаблон излучения, определенный так, как показано на фиг. 9(a)-9(c), обеспечивает широкий диапазон перемещения светоизлучающих точек и за счет этого предоставляет простое визуальное распознавание. Кроме того, можно передавать два или более наборов информации находящемуся в транспортном средстве человеку посредством изменения скорости перемещения или длины диапазона перемещения светоизлучающих точек согласно абсолютным величинам угловой скорости относительно вертикальной оси и поперечного ускорения или посредством принудительного изменения цвета излучения света посредством модуля 15 вычисления цветов излучения света.
[0028] Далее описывается еще один другой пример способа определения шаблона излучения посредством модуля 13 определения шаблонов излучения. Модуль 13 определения шаблонов излучения может разделять внешнюю периферию (светоизлучающие части) руля 2 на несколько областей с предварительно определенным углом и определять область излучения света согласно траектории движения транспортного средства. Например, внешняя периферия руля 2 разделяется на восемь областей R1-R8 излучения света, как показано на фиг. 10(a).
[0029] Затем в случае, если отклонение транспортного средства изменяется в значительной степени при изгибе вправо или вправо, либо если область перемещения изменяется, к примеру, при изменении полос движения, как показано на фиг. 10(b), светоизлучающие точки принудительно перемещаются в направлении, идентичном направлению перемещения в двух областях R1 и R8, расположенных в верхней части, как указано посредством стрелки 41.
[0030] Помимо этого, когда кривизна изгиба является относительно небольшой, светоизлучающие точки принудительно перемещаются в направлении стрелки 42 в верхних правых двух областях R1 и R2 в случае, если транспортное средство должно поворачивать в направлении влево, в то время как светоизлучающие точки принудительно перемещаются в направлении стрелки 43 в верхних левых двух областях R7 и R8 в случае, если транспортное средство должно поворачивать в направлении вправо.
[0031] Помимо этого, когда изгиб является пологим, и за счет этого кривизна изгиба является относительно большой, светоизлучающие точки принудительно перемещаются в направлении стрелки 44 внутри двух поперечных областей R2 и R3 в случае, если транспортное средство должно поворачивать в направлении влево, в то время как светоизлучающие точки принудительно перемещаются в направлении стрелки 45 внутри двух поперечных областей R6 и R7 в случае, если транспортное средство должно поворачивать в направлении вправо.
[0032] Как описано выше, вычисление траектории транспортного средства может быть упрощено посредством разделения внешней периферии руля 2 на несколько областей R1-R8 излучения света и посредством определения областей излучения света согласно траектории движения транспортного средства. Таким образом, можно представлять отклонение транспортного средства при уменьшении вычислительной нагрузки.
[0033] Помимо этого, в случае если руль 2 транспортного средства с поддержкой автоматизированного вождения поворачивается автоматически, когда транспортное средство движется по изгибу, отклонение транспортного средства и перемещение светоизлучающих точек, наблюдаемых от находящегося в транспортном средстве человека, не совпадает, если диапазон светоизлучающих точек поворачивается вместе с поворотом руля 2.
[0034] Чтобы справиться с ситуацией, модуль 4 обнаружения угла, показанный на фиг. 1, обнаруживает угол поворота руля 2. На основе угла поворота руля 2, обнаруженного посредством модуля 4 обнаружения угла, модуль 16 вычисления позиций излучения света вызывает перемещение диапазона светоизлучающих точек таким образом, что величина поворота руля 2 компенсируется, и таким образом, что диапазон светоизлучающих точек, наблюдаемых от находящегося в транспортном средстве человека, является постоянным, даже когда руль 2 поворачивается.
[0035] Как показано на фиг. 11, транспортное средство 10 движется в позиции P11 на маршруте 31 движения, и в этот момент руль 2 находится, например, в нейтральной позиции, а верхний конец 10 расположен в верхней части. Светоизлучающие точки перемещаются в диапазоне R0, поскольку маршрут 31 впереди представляет собой изгиб влево. Когда транспортное средство 10 движется, чтобы достигать позиции P12 на маршруте 31 движения, руль 2 поворачивается в ответ на движение на повороте транспортного средства 10. В этот момент, модуль 16 вычисления позиций излучения света вызывает перемещение позиций светоизлучающих точек таким образом, чтобы компенсировать величину поворота руля 2, и за счет этого поддерживает диапазон R0 светоизлучающих точек, наблюдаемых от находящегося в транспортном средстве человека.
[0036] Следует отметить, что при определении шаблона излучения посредством модуля 13 определения шаблонов излучения, можно изменять длительность излучения, длительность остаточного излучения, мигание и цвет излучения света источников 21 света, скорость перемещения светоизлучающих точек, диапазон излучения и число точек, одновременно испускающих свет. Различные формы указания, такие как подвижная точка, комета со стелющимся хвостом и волнистая полоса, могут составляться посредством комбинирования вышеуказанного.
[0037] Далее описывается пример способа передачи отклонения транспортного средства согласно первому варианту осуществления настоящего изобретения со ссылкой на фиг. 12.
[0038] Во-первых, на этапе S11, модуль 3 управления автоматизированным вождением формирует план движения и выполняет управление автоматизированным вождением на основе плана движения. На этапе S12, на основе плана движения, выведенного посредством модуля 3 управления автоматизированным вождением, модуль 12 вычисления отклонения транспортного средства вычисляет траекторию вождения в качестве отклонения транспортного средства посредством проецирования маршрута движения от текущего момента до времени после истечения предварительно определенного периода времени (например, после трех-семи секунд) на поверхность дороги.
[0039] На этапе S13, модуль 11 определения состояния управления определяет, выполняется ли или нет (осуществляется вождение вручную) управление автоматизированным вождением посредством модуля 3 управления автоматизированным вождением. Обработка завершается, если на этапе S13 определено, что управление автоматизированным вождением не выполняется. С другой стороны, если на этапе S13 определено, что управление автоматизированным вождением выполняется, обработка переходит к этапу S14.
[0040] На этапе S14, модуль 13 определения шаблонов излучения определяет шаблон излучения на основе отклонения транспортного средства, вычисленного посредством модуля 12 вычисления отклонения транспортного средства. На этапе S15, модуль 2 указания заставляет источники 21 света, расположенные на внешней периферии руля 2, излучать свет в соответствии с шаблоном излучения, определенным посредством модуля 13 определения шаблонов излучения. Здесь, вычисление отклонения транспортного средства на этапе S12 может выполняться перед процессом определения шаблона излучения на этапе S14, если на этапе S13 определено, что управление автоматизированным вождением выполняется.
[0041] Согласно первому варианту осуществления настоящего изобретения, можно представлять отклонение транспортного средства на руле 2, который тесно связан с отклонением транспортного средства, посредством представления отклонения транспортного средства с использованием шаблона излучения источников 21 света, расположенных на руле 2. Таким образом, можно представлять заранее отклонение транспортного средства в ходе управления автоматизированным вождением таким способом, чтобы предоставлять возможность находящемуся в транспортном средстве человеку интуитивно понимать отклонение транспортного средства.
[0042] Помимо этого, что касается обычного транспортного средства, направление руления руля 2 является идентичным направлению, в котором возникает отклонение транспортного средства. По этой причине, можно предоставлять возможность находящемуся в транспортном средстве человеку легко понимать направление, в котором возникает отклонение транспортного средства, посредством совмещения направления перемещения светоизлучающих точек с направлением, в котором возникает отклонение транспортного средства, в ходе управления автоматизированным вождением посредством модуля 3 управления автоматизированным вождением.
[0043] Помимо этого, когда состояние управления транспортного средства изменяется с автоматизированного вождения на вождение вручную вследствие операции вмешательства и т.п. находящимся в транспортном средстве человеком в ходе управления автоматизированным вождением, модуль 2 указания может указывать информацию, отличающуюся от направления, в котором возникает отклонение транспортного средства. По этой причине, в режиме ручного руления, шаблон излучения светоизлучающих точек может управляться согласно углу поворота руля 2, например, не в будущем направлении, в котором возникает отклонение транспортного средства. Таким образом, можно использовать модуль 2 указания в качестве устройства помощи угла поворота при рулении в режиме ручного руления.
[0044] Помимо этого, посредством изменения цвета излучения света или скорости перемещения светоизлучающих точек согласно абсолютным величинам угловой скорости относительно вертикальной оси и поперечного ускорения, сформированного вследствие управления автоматизированным вождением, можно представлять абсолютную величину угловой скорости относительно вертикальной оси или поперечного ускорения, сформированного вследствие управления автоматизированным вождением, и за счет этого представлять уровень ощущения тревожности относительно отклонения транспортного средства. Следовательно, находящемуся в транспортном средстве человеку может предоставляться возможность подготавливаться к отклонению транспортного средства заранее.
[0045] Помимо этого, как показано на фиг. 8(a)-8(c), касательные линии через начальную точку и конечную точку на траектории транспортного средства, наблюдаемой из позиции точки обзора находящегося в транспортном средстве человека, от текущего момента до времени после истечения предварительно определенного периода времени, отображаются на внешней периферии руля 2. Позиции излучения света светоизлучающих точек определяются таким образом, что позиции излучения света перемещаются между контактными точками отображаемых касательных линий с рулем 2. Таким образом, абсолютная величина отклонения транспортного средства указывается с помощью длины диапазона перемещения светоизлучающих точек, и градиент конца верхушки светоизлучающих точек представляет направление, в котором возникает отклонение транспортного средства. Следовательно, могут передаваться два набора информации.
[0046] Помимо этого, как показано на фиг. 9(a)-9(b), касательная линия к траектории транспортного средства, наблюдаемой из позиции точки обзора находящегося в транспортном средстве человека, от текущего момента до времени после истечения предварительно определенного периода времени отображается на внешней периферии руля 2. Позиции излучения света светоизлучающих точек определяются таким образом, что позиции излучения света перемещаются в предварительно определенном диапазоне, имеющем контактную точку отображаемой касательной линии с рулем 2 в качестве центра. Таким образом, можно передавать информацию в периферийном виде, поскольку направление отклонения транспортного средства представлено посредством градиента светоизлучающих точек от начальных точек P3 в конечные точки P4 при поддержании до определенной степени диапазона перемещения светоизлучающих точек. Кроме того, посредством изменения длины диапазона перемещения светоизлучающих точек источников 21 света согласно абсолютной величине угловой скорости относительно вертикальной оси или поперечного ускорения, можно указывать абсолютную величину угловой скорости относительно вертикальной оси или поперечного ускорения в дополнение к направлению, в котором возникает отклонение транспортного средства. Следовательно, могут передаваться два набора информации.
[0047] Помимо этого, как показано на фиг. 10(a) и фиг. 10(b), внешняя периферия руля 2 разделяется на несколько областей, и области, в которых перемещаются светоизлучающие точки, определяются из нескольких областей, согласно отклонению транспортного средства. Таким образом, можно упрощать вычисление диапазона перемещения светоизлучающих точек и уменьшать нагрузку на модуль 16 вычисления позиций излучения света. Здесь, области, которые должны принудительно излучать свет, могут выбираться из нескольких областей после того, как светоизлучающие части источников 21 света разделяются на несколько областей, даже в случае, если источники 21 света находятся в позиции, отличающейся от внешней периферии руля 2.
[0048] Помимо этого, как показано на фиг. 11, позиции излучения света светоизлучающих точек перемещаются, согласно углу поворота руля 2, обнаруженному посредством модуля 4 обнаружения угла, так что позиции излучения света, наблюдаемые от находящегося в транспортном средстве человека, поддерживаются, даже когда руль 2 поворачивается. Таким образом, диапазон R0 излучения, наблюдаемый от находящегося в транспортном средстве человека, не изменяется, даже когда руль 2 поворачивается в ходе изгиба и т.п. Следовательно, корреляция между градиентом диапазона R0 излучения и направлением отклонения транспортного средства может поддерживаться.
[0049] Помимо этого, можно рассеивать и комбинировать свет из нескольких светоизлучающих элементов 21 посредством предоставления рассеивающего элемента 23, показанного на фиг. 3(a) и фиг. 3(b), и отражателя 24, показанного на фиг. 4(a) и фиг. 4(b). Следовательно, находящийся в транспортном средстве человек может визуально распознавать светоизлучающие точки, как если светоизлучающая точка перемещается плавно.
[0050] Может предоставляться устройство рулевого управления с переменным передаточным отношением (VGR), которое изменяет передаточное отношение между углом руля 2 и углом поворота. Альтернативно, может предоставляться устройство рулевого управления по проводам (SBW), которое электрически управляет углом поворота на основе операции руля 2, при этом механическое соединение между рулем 2 и поворотным колесом разрывается. В этих случаях, отклонение транспортного средства может указываться посредством перемещения светоизлучающих точек при выполнении управления автоматизированным вождением, при фиксированном угле поворота руля 2. Следовательно, можно предотвращать для безопасности поворот руля 2 в ходе управления автоматизированным вождением, и одновременно уведомлять находящегося в транспортном средстве человека в отношении движения транспортного средства с использованием движения светоизлучающих точек на руле 2.
[0051] Помимо этого, можно определять шаблон излучения, соответствующий отклонению транспортного средства, посредством проецирования траектории транспортного средства от текущего момента до времени после истечения предварительно определенного периода времени на плоскость S1, включающую в себя внешнюю периферию руля 2, или посредством проецирования этой траектории транспортного средства на сферическую поверхность, центр которой представляет собой позицию точки обзора находящегося в транспортном средстве человека.
[0052] В первом варианте осуществления настоящего изобретения, описан случай, в котором источники 21 света (светоизлучающие элементы) располагаются на участке 20 для захвата, который представляет собой внешний периферийный участок руля 2. Здесь, позиция для того, чтобы располагать источники 21 света, не ограничена конкретным образом при условии, что находящийся в транспортном средстве человек может визуально распознавать позицию на руле 2. Например, источники 21 света (светоизлучающие элементы) могут располагаться в центральном участке руля 2. Кроме того, описан случай, который включает в себя линию точечных источников света в качестве источников 21 света, сформированных посредством размещения нескольких светоизлучающих элементов. Здесь, тип источников 21 света не ограничен конкретным образом. В качестве источников 21 света могут быть предусмотрены источники света, которые предоставляют возможность находящемуся в транспортном средстве человеку визуально распознавать светоизлучающие части, как если светоизлучающая часть перемещается.
[0053] Второй вариант осуществления
Устройство передачи отклонения транспортного средства согласно второму варианту осуществления настоящего изобретения представляет собой функцию, достигаемую посредством комбинирования: устройства рулевого управления, допускающего свободное управление взаимосвязью между углом поворота поворотного колеса (например, переднего колеса) и углом поворота руля при рулении; и модуля управления автоматизированным вождением, допускающего автоматическое управление отклонением рассматриваемого транспортного средства. В качестве примеров устройства рулевого управления, допускающего свободное управление взаимосвязью между углом поворота переднего колеса и углом поворота руля при рулении, предусмотрены устройство рулевого управления с переменным передаточным отношением (VGR), допускающее изменение передаточного отношения между углом руля и углом поворота, и устройство рулевого управления по проводам (SBW), которое электрически управляет углом поворота на основе операции руля, при этом механическое соединение между рулем и поворотным колесом разрывается.
[0054] В ходе управления автоматизированным вождением, направление отклонения транспортного средства, указываемое посредством ориентации руля, предоставляет возможность находящемуся в транспортном средстве человеку подготавливаться к отклонению транспортного средства. Здесь, когда управление выполняется таким образом, что отклонение транспортного средства после предварительно определенного периода времени показано на основе плана вождения посредством модуля управления автоматизированным вождением, находящемуся в транспортном средстве человеку предоставляется возможность подготавливаться к фактическому отклонению транспортного средства до того, как оно возникает. Таким образом, можно предотвращать укачивание и ощущение беспокойства.
[0055] Как показано на фиг. 13, устройство передачи отклонения транспортного средства согласно второму варианту осуществления настоящего изобретения содержит ECU 1, модуль 3 управления автоматизированным вождением, модуль 4 обнаружения угла и средство 5 рулевого управления. Допустим, что, помимо руля, средство 5 рулевого управления включает в себя устройство рулевого управления, допускающее свободное управление взаимосвязью между углом поворота поворотного колеса и углом поворота руля при рулении, к примеру, VGR-устройство или SBW-устройство. ECU 1 включает в себя модуль 41 определения шаблонов поворота и модуль 44 управления рулением вместо модуля 13 определения шаблонов излучения и модуля 17 управления излучением, показанных на фиг. 1.
[0056] Модуль 41 определения шаблонов поворота определяет шаблон поворота (шаблон руления) руля 5 согласно отклонению транспортного средства, вычисленному посредством модуля 12 вычисления отклонения транспортного средства. Модуль 41 определения шаблонов поворота включает в себя модуль 42 вычисления скорости поворота, который вычисляет скорость поворота руля 5, и модуль 43 вычисления угла поворота, который вычисляет угол поворота руля 5.
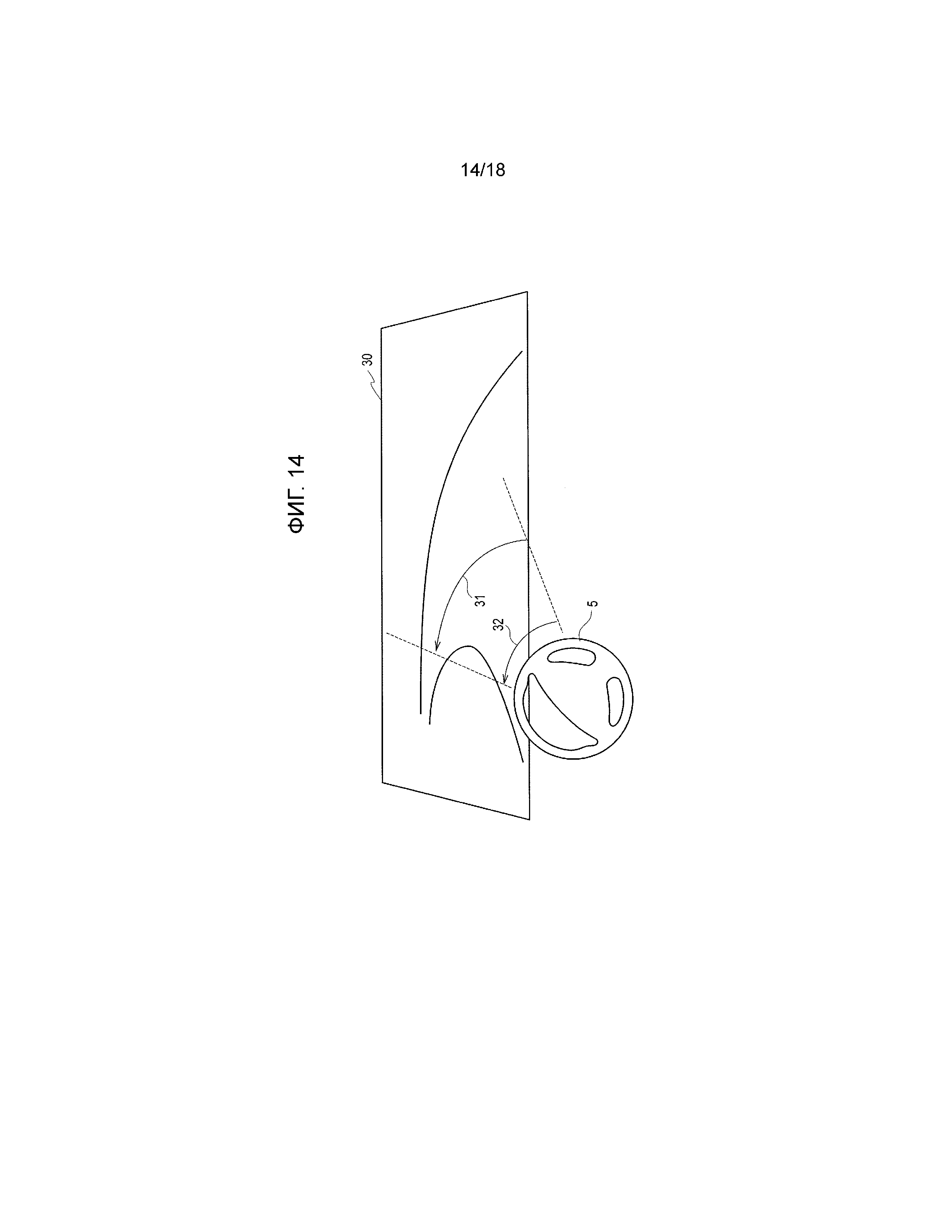
[0057] Модуль 44 управления рулением представляет находящемуся в транспортном средстве человеку направление, в котором возникает отклонение транспортного средства, посредством поворота (руления) руля 5 в соответствии с шаблоном поворота, определенным посредством модуля 41 определения шаблонов поворота. Например, как показано на фиг. 14, когда маршрут 31 для отклонения транспортного средства представляет собой изгиб влево, руль 5 поворачивается в направлении, показанном стрелкой 32. Здесь, с помощью указания вектора направления движения транспортного средства в позиции на верхнем конце руля 5 (в направлении от центра к верхнему концу руля 5), находящемуся в транспортном средстве человеку предоставляется возможность распознавать относительное направление движения при просмотре вперед. Кроме того, угол поворота почти наверняка находится в диапазоне от -90 до +90 градусов. Таким образом, можно снижать риск, например, того, что рука может застрять в руле 5, когда руль 5 поворачивается.
[0058] Далее описывается способ определения шаблона поворота руля 5 согласно второму варианту осуществления настоящего изобретения. Во-первых, как и в случае первого варианта осуществления настоящего изобретения, показанного на фиг. 6(a) и фиг. 6(b), модуль 12 вычисления отклонения транспортного средства вычисляет будущую траекторию 31 транспортного средства от текущего момента до времени после истечения предварительно определенного периода времени (например, после 0,3-3 секунд). Как показано на фиг. 7, модуль 43 вычисления угла поворота проецирует будущую траекторию 31 транспортного средства на позицию, наблюдаемую от находящегося в транспортном средстве человека. Как и в случае первого варианта осуществления настоящего изобретения, способ проецирования на поверхность S1 параллельно рулю 5 и способ проецирования на поверхность, центр которой представляет собой позицию точки обзора находящегося в транспортном средстве человека, могут использоваться в качестве способов проекции.
[0059] Затем, модуль 43 вычисления угла поворота параллельно переносит касательные линии La и Lb через начальную точку PA и конечную точку PB на будущей траектории транспортного средства таким образом, что две линии контактируют с внешней периферией руля 5. Далее, пусть перенесенные линии являются касательными линиями La' и Lb', как показано на фиг. 15(a), и мы получаем контактные точки P1 и P2, как показано на фиг. 15(b). После этого, предположим, что центр руля 5 представляет собой позицию рассматриваемого транспортного средства, и верхний конец P0 на внешней периферии руля 5 представляет собой направление движения по прямой линии, как показано на фиг. 15(c). Модуль 43 вычисления угла поворота вычисляет угол поворота руля 5 таким образом, что верхний конец P0 на внешней периферии руля 5 совмещается с вектором направления движения, соединяющим две контактные точки P1 и P2.
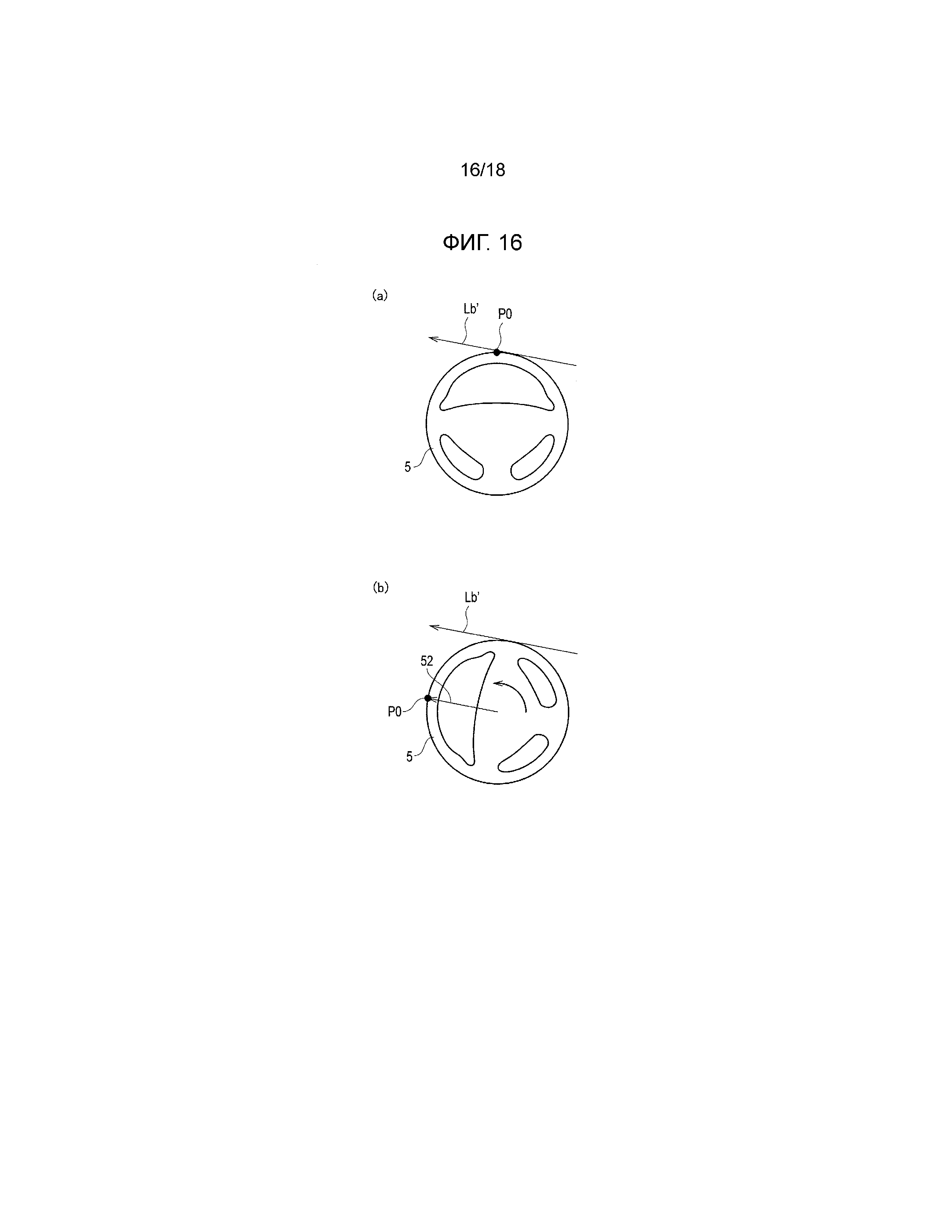
[0060] Между тем, ниже описывается другой пример способа вычисления угла поворота посредством модуля 43 вычисления угла поворота. Как показано на фиг. 16(a), касательная линия Lb' через конечную точку PB на будущей траектории транспортного средства параллельно переносится таким образом, что она контактирует с внешней периферией руля 5. Как показано на фиг. 16(b), угол поворота руля 5 вычисляется таким образом, что направление движения касательной линии Lb' и верхнего конца P0 на руле 5 указывают в идентичном направлении.
[0061] Помимо этого, модуль 43 вычисления угла поворота может изменять угол поворота руля 5 согласно угловой скорости относительно вертикальной оси или поперечному ускорению. Например, угол поворота руля 5 задается большим по мере того, как угловая скорость относительно вертикальной оси или поперечное ускорение становится больше.
[0062] Помимо этого, модуль 42 вычисления скорости поворота вычисляет скорость поворота руля 5 согласно отклонению транспортного средства. Например, скорость поворота руля 5 может задаваться большей по мере того, как угловая скорость относительно вертикальной оси или поперечное ускорение становится больше.
[0063] Фиг. 17 иллюстрирует состояния руля 5 в позициях P21, P22 и P23 на траектории 31 вождения, в то время как транспортное средство 10 движется по траектории вождения 31. Когда транспортное средство 10 движется в позиции P21, руль 5 находится в нейтральной позиции, и верхний конец P0 расположен в верхней части. Когда транспортное средство 10 достигает позиции P22, руль 5 поворачивается, поскольку транспортное средство 10 приближается к изгибу влево, и вектор направления движения транспортного средства представлен в направлении от центра к верхнему концу P0 руля 5.
[0064] Далее описывается пример способа передачи отклонения транспортного средства согласно второму варианту осуществления настоящего изобретения со ссылкой на фиг. 18.
[0065] Сначала на этапе S21, модуль 3 управления автоматизированным вождением формирует план движения и выполняет управление автоматизированным вождением в соответствии с планом движения. На этапе S22, модуль 12 вычисления отклонения транспортного средства вычисляет отклонение транспортного средства от текущего момента до времени после истечения предварительно определенного периода времени на основе плана движения, выведенного посредством модуля 3 управления автоматизированным вождением.
[0066] На этапе S23, модуль 11 определения состояния управления определяет, является ли SBW нормальным или нет. Обработка завершается, если на этапе S23 определено, что SBW не является нормальным. С другой стороны, если на этапе S23 определено, что SBW является нормальным, обработка переходит к этапу S24.
[0067] На этапе S24, модуль 11 определения состояния управления определяет, выполняется ли или нет управление автоматизированным вождением посредством модуля 3 управления автоматизированным вождением. Если на этапе S24 определено, что управление автоматизированным вождением не выполняется, обработка завершается, поскольку вождение вручную выполняется. С другой стороны, если на этапе S24 определено, что управление автоматизированным вождением выполняется, обработка переходит к этапу S25.
[0068] На этапе S25, модуль 43 вычисления угла поворота вычисляет угол поворота руля 5 согласно отклонению транспортного средства, вычисленному посредством модуля 12 вычисления отклонения транспортного средства. Кроме того, модуль 42 вычисления скорости поворота вычисляет угловую скорость поворота руля 5 согласно отклонению транспортного средства, вычисленному посредством модуля 12 вычисления отклонения транспортного средства. На этапе S26, модуль 44 управления рулением управляет рулевым колесом 5 на угол поворота и угловой скорости поворота, соответственно, вычисленных посредством модуля 43 вычисления угла поворота и модуля 42 вычисления скорости поворота.
[0069] Согласно второму варианту осуществления настоящего изобретения, отклонение транспортного средства может представляться с помощью состояния руля 5, который тесно связан с отклонением транспортного средства. Таким образом, можно представлять заранее отклонение транспортного средства таким образом, чтобы предоставлять возможность находящемуся в транспортном средстве человеку легко и интуитивно понимать отклонение транспортного средства.
[0070] Помимо этого, направление будущего отклонения транспортного средства, представленного на основе будущей траектории транспортного средства, предоставляет возможность находящемуся в транспортном средстве человеку распознавать заранее и подготавливаться к будущему отклонению транспортного средства. Кроме того, когда будущее отклонение транспортного средства не совпадает с намерением находящегося в транспортном средстве человека, можно переключаться на операцию для того, чтобы компенсировать задачу автоматизированного вождения до того, как возникает отклонение транспортного средства.
[0071] Помимо этого, посредством изменения угла поворота руля согласно угловой скорости относительно вертикальной оси или поперечному ускорению, можно представлять угловую скорость относительно вертикальной оси или поперечное ускорение в дополнение к направлению, в котором возникает отклонение транспортного средства.
[0072] Как описано выше, контент настоящего изобретения описан наряду с первым и вторым вариантами осуществления настоящего изобретения. Специалистам в данной области техники должно быть очевидным, что настоящее изобретение не ограничено этими описаниями, и что возможны различные модификации и улучшения.
Список ссылочных позиций
[0073] 1 - модуль управления двигателем (ECU)
2, 5 - модуль указания (руль)
3 - модуль управления автоматизированным вождением
4 - модуль обнаружения угла
10 - транспортное средство
11 - модуль определения состояния управления
12 - модуль вычисления отклонения транспортного средства
13 - модуль определения шаблонов излучения
14 - модуль вычисления направления перемещения
15 - модуль вычисления цветов излучения света
16 - модуль вычисления позиций излучения света
17 - модуль управления излучением
20 - участок для захвата
21 - источник света (светоизлучающий элемент)
22 - опорный участок
23 - рассеивающий элемент
24 - отражатель
25 - щель
30 - ветровое стекло
41 - модуль определения шаблонов поворота
42 - модуль вычисления скорости поворота
43 - модуль вычисления угла поворота
44 - модуль управления рулением
Реферат
Настоящее изобретение относится к устройству передачи отклонения транспортного средства. Устройство передачи отклонения ТС в транспортном средстве с поддержкой автоматизированного вождения, допускающем автоматическое управление отклонением ТС, содержит модуль вычисления отклонения ТС, модуль определения шаблонов излучения и модуль указания. Модуль указания включает в себя источник света, расположенный на руле, и указывает направление, в котором возникает отклонение ТС. Модуль определения шаблонов излучения определяет светоизлучающую часть источника света на основе будущей траектории ТС от текущего момента до времени после истечения предварительно определенного времени. Техническим результатом является облегчение понимания отклонения ТС водителем, которое возникает в режиме автоматизированного вождения. 17 з.п. ф-лы, 18 ил.
Комментарии