Оборудование управления движением транспортного средства в аварийном режиме - RU2706754C1
Код документа: RU2706754C1
Чертежи






Описание
Область техники
[0001] Изобретение относится к оборудованию управления, которое выполняет управление движением в аварийном режиме для транспортного средства, когда анормальность возникает в оборудовании для выполнения операций переключения режимов трансмиссии.
Уровень техники
[0002] Известно оборудование управления для транспортного средства, которое включает в себя устройство управления и устройство определения анормальностей. Устройство управления переключает диапазон движения на основе рабочей позиции оборудования для выполнения операций переключения режимов трансмиссии, которое управляется водителем. Рабочая позиция обнаруживается посредством датчика рабочей позиции. Устройство определения анормальностей определяет то, возникает или нет анормальность при обнаружении, в силу которой рабочая позиция оборудования для выполнения операций переключения режимов трансмиссии становится неопределенной. В качестве оборудования управления для транспортного средства, предусмотрено оборудование управления для транспортного средства, описанное в публикации международной заявки WO 2010/097936. В описании WO 2010/097936, в случае если возникновение анормальности при обнаружении датчика рабочей позиции определяется в ходе движения, текущий диапазон движения поддерживается до тех пор, пока операция оборудования для выполнения операций переключения режимов трансмиссии водителем не будет обнаружена, и когда операция оборудования для выполнения операций переключения режимов трансмиссии водителем обнаруживается, диапазон движения устройства трансмиссии с переключаемыми режимами переключается на диапазон нейтрали (N-диапазон), который представляет собой диапазон блокирования передачи мощности. В силу этого, транспортное средство движется в аварийном режиме движения, при недопущении непреднамеренного переключения переднего/заднего хода во время анормальности датчика рабочей позиции.
Сущность изобретения
[0003] В WO 2010/097936, в случае если оборудование для выполнения операций переключения режимов трансмиссии управляется, когда рабочая позиция не может идентифицироваться вследствие анормальности датчика рабочей позиции, диапазон движения переключается на диапазон нейтрали таким образом, что непреднамеренное переключение переднего/заднего хода вследствие ложного обнаружения не возникает. Следовательно, затруднительно поддерживать движение в аварийном режиме движения до тех пор, пока транспортное средство не переместится в соответствующее место стоянки для эвакуации.
[0004] Изобретение предоставляет оборудование управления для транспортного средства, которое может поддерживать движение в аварийном режиме движения в соответствующее место стоянки для эвакуации, даже когда анормальность при обнаружении оборудования для выполнения операций переключения режимов трансмиссии возникает.
[0005] Оборудование управления для транспортного средства в первом аспекте изобретения включает в себя устройство управления, устройство определения анормальностей и устройство управления движением в аварийном режиме. Устройство управления переключает диапазон движения транспортного средства на основе рабочей позиции оборудования для выполнения операций переключения режимов трансмиссии, которое управляется водителем. Рабочая позиция обнаруживается посредством оборудования для обнаружения рабочей позиции. Устройство определения анормальностей определяет то, возникает или нет анормальность при обнаружении в оборудовании для обнаружения рабочей позиции. Устройство управления движением в аварийном режиме выполняет управление движением в аварийном режиме, посредством которого транспортное средство движется независимо от операции оборудования для выполнения операций переключения режимов трансмиссии, в случае если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает в ходе движения транспортного средства.
[0006] При использовании этого оборудования управления, даже в случае, если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает, транспортное средство движется независимо от операции оборудования для выполнения операций переключения режимов трансмиссии водителем, и в силу этого можно продолжать движение в аварийном режиме движения.
[0007] Оборудование управления дополнительно может включать в себя устройство выдачи уведомлений, чтобы уведомлять водителя в отношении того, что управление движением в аварийном режиме может выполняться, в случае если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает. Устройство управления движением в аварийном режиме может выполнять управление движением в аварийном режиме после уведомления посредством устройства выдачи уведомлений.
[0008] При использовании этого оборудования управления, в случае если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает, водитель уведомляется в отношении того, что управление движением в аварийном режиме может выполняться. Следовательно, в случае возникновения анормальности при обнаружении, водитель может распознавать, что управление движением в аварийном режиме может выполняться.
[0009] В оборудовании управления, устройство управления движением в аварийном режиме может продолжать автоматическое вождение в случае, если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает в ходе автоматического вождения.
[0010] При использовании этого оборудования управления, в случае если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает в ходе автоматического вождения, устройство управления движением в аварийном режиме непрерывно выполняет автоматическое вождение. Следовательно, можно продолжать движение в аварийном режиме движения посредством автоматического вождения.
[0011] Оборудование управления может включать в себя устройство определения состояния остановки и устройство разрешения на ввод. Устройство определения состояния остановки может определять то, находится или нет транспортное средство в состоянии остановки, в случае если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает. Устройство разрешения на ввод может разрешать ввод пункта назначения при управлении движением в аварийном режиме в случае, если устройство определения состояния остановки определяет то, что транспортное средство находится в состоянии остановки. Когда пункт назначения вводится, устройство управления движением в аварийном режиме может инструктировать транспортному средству двигаться во введенный пункт назначения.
[0012] При использовании этого оборудования управления, в случае если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает, и если устройство определения состояния остановки определяет то, что транспортное средство находится в состоянии остановки, ввод пункта назначения разрешается. Следовательно, ввод пункта назначения выполняется во время остановки транспортного средства, обеспечивая возможность ввода пункта назначения в безопасном состоянии. Дополнительно, посредством ввода пункта назначения, транспортное средство может двигаться в пункт назначения в аварийном режиме движения.
[0013] Оборудование управления дополнительно может включать в себя устройство определения переключения. Устройство определения переключения может определять то, выполнено или нет переключение на автоматическое вождение водителем после того, как устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает. Устройство управления движением в аварийном режиме может инструктировать транспортному средству двигаться посредством автоматического вождения в случае, если устройство определения переключения определяет то, что переключение на автоматическое вождение выполнено.
[0014] При использовании этого оборудования управления, в случае если переключение на автоматическое вождение выполнено водителем, автоматическое вождение выполняется. Следовательно, водитель может выбирать то, следует или нет выполнять автоматическое вождение.
[0015] Оборудование управления дополнительно может включать в себя оборудование навигации на основе инструкций по намеченному маршруту. Оборудование навигации на основе инструкций по намеченному маршруту может задавать намеченный маршрут движения в пункт назначения. Когда пункт назначения вводится в оборудование навигации на основе инструкций по намеченному маршруту, устройство управления движением в аварийном режиме может инструктировать транспортному средству двигаться во введенный пункт назначения в случае, если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает.
[0016] При использовании этого оборудования управления, в случае если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает, и если пункт назначения вводится в оборудование навигации на основе инструкций по намеченному маршруту, транспортное средство движется в пункт назначения. Следовательно, без остановки, транспортное средство может двигаться в пункт назначения в аварийном режиме движения.
[0017] В оборудовании управления, устройство управления движением в аварийном режиме может извлекать место временной стоянки для эвакуации в случае, если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает.
[0018] При использовании оборудования управления, в случае если устройство определения анормальностей определяет анормальность при обнаружении в оборудовании для обнаружения рабочей позиции, устройство управления движением в аварийном режиме извлекает место временной стоянки для эвакуации. Следовательно, водитель выбирает извлеченное место временной стоянки для эвакуации в качестве пункта назначения и в силу этого может инструктировать транспортному средству двигаться в место временной стоянки для эвакуации.
[0019] Оборудование управления дополнительно может включать в себя устройство определения позиции движения. Устройство определения позиции движения может определять то, представляет или нет дорога, по которой движется транспортное средство, собой автостраду. Устройство управления движением в аварийном режиме может инструктировать транспортному средству двигаться к месту временной стоянки для эвакуации, заданному на автостраде, в случае если устройство определения позиции движения определяет то, что дорога, по которой движется транспортное средство, представляет собой автостраду.
[0020] При использовании этого оборудования управления для транспортного средства, в случае, если устройство определения анормальностей определяет анормальность при обнаружении в ходе движения транспортного средства на автостраде, транспортное средство движется к месту временной стоянки для эвакуации, заданному на автостраде. Следовательно, транспортное средство может продолжать движение в аварийном режиме движения в безопасное место без остановки в середине автострады.
[0021] В оборудовании управления, устройство управления движением в аварийном режиме может выполнять фиксацию транспортного средства после остановки с помощью электрического парковочного тормоза в случае, если устройство определения анормальностей определяет то, что анормальность при обнаружении в оборудовании для обнаружения рабочей позиции возникает вследствие анормальности модуля управления переключением режимов трансмиссии, который выполняет управление переключением для диапазона движения транспортного средства.
[0022] При использовании этого оборудования управления, в случае если анормальность модуля управления переключением режимов трансмиссии возникает, операция парковки выполняется посредством электрического парковочного тормоза. Следовательно, даже когда механизм блокировки при парковке не приводится в действие вследствие неисправности модуля управления переключением режимов трансмиссии, можно предотвращать перемещение транспортного средства после парковки.
[0023] В оборудовании управления, модуль управления переключением режимов трансмиссии может приводить в действие механизм блокировки при парковке, который механически прекращает вращение ведущего колеса, и переключать диапазон движения транспортного средства на диапазон парковки.
[0024] В случае возникновения анормальности модуля управления переключением режимов трансмиссии, затруднительно приводить в действие механизм блокировки при парковке и переключать диапазон движения на диапазон парковки. Тем не менее, при использовании этого оборудования управления, можно предотвращать перемещение транспортного средства после парковки посредством приведения в действие электрического парковочного тормоза.
[0025] В оборудовании управления, устройство управления движением в аварийном режиме может выполнять управление автоматическим вождением на основе информации пункта назначения и информации текущей позиции.
[0026] При использовании этого оборудования управления, в случае возникновения анормальности при обнаружении рабочей позиции оборудования для выполнения операций переключения режимов трансмиссии, транспортное средство выполняет автоматическое вождение на основе информации пункта назначения и информации текущей позиции таким образом, что транспортное средство непрерывно движется.
Краткое описание чертежей
[0027] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых одинаковыми ссылочными позициями обозначены аналогичные элементы, и на которых:
Фиг. 1 является схемой, показывающей схематичную конфигурацию гибридного транспортного средства, к которому применяется изобретение, и показывающей главную часть системы управления, которая предоставляется для управления каждым устройством транспортного средства;
Фиг. 2 является функциональной блок-схемой для описания функции управления электронным оборудованием управления с фиг. 1;
Фиг. 3 является блок-схемой последовательности операций способа для описания главной части операции управления ECU автоматического вождения с фиг. 2, т.е. операции управления в отношении автоматического вождения;
Фиг. 4 является блок-схемой последовательности операций способа для описания операции управления электронного оборудования управления с фиг. 2 в случае, если анормальность при обнаружении рабочей позиции переключения режимов трансмиссии возникает в ходе движения;
Фиг. 5 является блок-схемой последовательности операций способа для описания управления движением в аварийном режиме в случае возникновения анормальности при обнаружении рабочей позиции переключения режимов трансмиссии;
Фиг. 6 является блок-схемой последовательности операций способа для описания альтернативного способа управления движением в аварийном режиме в случае, если определяется то, что рабочая позиция переключения режимов трансмиссии является неопределенной; и
Фиг. 7 является блок-схемой последовательности операций способа для описания операции управления электронного оборудования управления в случае, если анормальность при обнаружении рабочей позиции переключения режимов трансмиссии возникает вследствие анормальности ECU переключения режимов трансмиссии по проводам.
Подробное описание вариантов осуществления изобретения
[0028] Далее подробно описываются примерные варианты осуществления изобретения со ссылкой на чертежи. В вариантах осуществления, описанных ниже, чертежи упрощаются или модифицируются при необходимости, и соотношение размеров и форма каждой части не всегда нарисованы точно.
[0029] Фиг. 1 показывает схематичную конфигурацию гибридного транспортного средства 10 (в дальнейшем в этом документе называемого "транспортным средством 10"), к которому применяется изобретение, и показывает главную часть системы управления, которая предоставляется для управления каждым устройством транспортного средства 10. Транспортное средство 10 включает в себя двигатель 12 в качестве источника мощности приведения в движение для движения, устройство 14 трансмиссии с переключаемыми режимами, дифференциальный зубчатый механизм 18, в который передается динамическая мощность через выходную шестерню 16 устройства 14 трансмиссии с переключаемыми режимами, пару правой и левой осей 22 и правого и левого передних колес 24.
[0030] Например, устройство 14 трансмиссии с переключаемыми режимами представляет собой узел "мост-коробка передач" с передним расположением двигателя и передним приводом, который монтируется поперек на транспортном средстве 10. Устройство 14 трансмиссии с переключаемыми режимами включает в себя первый электромотор MG1, механизм 26 деления мощности, который делит динамическую мощность, передаваемую из двигателя 12, на первый электромотор MG1 и выходную шестерню 16, и второй электромотор MG2, который сцепляется с выходной шестерней 16 таким образом, что он допускает передачу динамической мощности. Устройство 14 трансмиссии с переключаемыми режимами приводится в действие посредством актуатора 28 и содержит механизм 29 блокировки при парковке, который механически прекращает вращение ведущих колес 24.
[0031] Каждый из первого электромотора MG1 и второго электромотора MG2, например, представляет собой синхронный электромотор, имеющий, по меньшей мере, одну из функции в качестве электромотора, который формирует механическую мощность приведения в движение из электрической энергии, и функции в качестве в качестве генератора, который формирует электрическую энергию из механической мощности приведения в движение, и предпочтительно должен представлять собой электромотор-генератор, который избирательно приводится в действие в качестве электромотора или в качестве генератора. Например, первый электромотор MG1 имеет функцию генератора (выработки электричества) для формирования реакционной мощности двигателя 12 и функцию электромотора (электромотора) для вращения и приведения в действие двигателя 12, который находится в состоянии остановки, и второй электромотор MG2 имеет функцию электромотора, который выводит мощность приведения в движение в качестве источника мощности приведения в движение для движения, и функцию выработки электричества для выработки электрической энергии из мощности приведения в движение на стороне ведущих колес 24 посредством рекуперации.
[0032] В транспортном средстве 10, динамическая мощность двигателя 12 передается в выходную шестерню 16 через механизм 26 деления мощности, и динамическая мощность передается на правое и левое передние колеса 24 через дифференциальный зубчатый механизм 18 и пару осей 22. Дополнительно, динамическая мощность второго электромотора MG2 передается в выходную шестерню 16, и динамическая мощность передается на правое и левое передние колеса 24 через дифференциальный зубчатый механизм 18 и пару осей 22.
[0033] Руль 30 управляется водителем. Когда водитель вращает руль 30, вращение передается в редуктор 36 через рулевой вал 32, сцепленный с рулем 30. Затем в редукторе 36, вращение рулевого вала 32 преобразуется в поперечное движение поперечной рулевой тяги 38, которая сцепляется с редуктором 36, и поперечная рулевая тяга 38 поперечно перемещается таким образом, что углы правого и левого передних колес 24 изменяются. Дополнительно, электромотор 40, который функционирует в качестве системы рулевого управления с электроусилителем руля, которая усиливает операцию от водителя, предоставляется таким образом, что он допускает передачу динамической мощности в рулевой вал 32. В дополнение к усилению операции от водителя, электромотор 40, при выполнении автоматического вождения, может изменять углы правого и левого передних колес 24 посредством вращения рулевого вала 32.
[0034] Каждое из правого и левого передних колес 24 содержит колесный тормоз 44, в который предоставляется тормозная мощность посредством регулирования гидравлического давления гидравлической жидкости, которая должна подаваться в тормозной гидравлический цилиндр 42. Гидравлическое давление гидравлической жидкости тормозного гидравлического цилиндра 42 увеличивается пропорционально силе на педали тормоза водителем. Гидравлическое давление гидравлической жидкости тормозного гидравлического цилиндра 42 управляется также посредством тормозного сигнала Sbk из ECU 60 тормоза, описанного далее, и тормозная мощность может предоставляться на переднее колесо 24 в зависимости от состояния движения транспортного средства 10. В случае выполнения автоматического вождения, гидравлическое давление тормозного гидравлического цилиндра 42 управляется на основе тормозного сигнала Sbk из ECU 60 тормоза, и соответствующая тормозная мощность предоставляется из колесного тормоза 44, в зависимости от состояния движения транспортного средства 10. Колесный тормоз 44 содержит электрический парковочный тормоз 47, который фиксирует переднее колесо таким образом, что переднее колесо 24 не может вращаться, когда трос натягивается посредством электромотора 45.
[0035] Оборудование 46 для выполнения операций переключения режимов трансмиссии предоставляется в позиции, обеспечивающей возможность водителю управлять оборудованием 46 для выполнения операций переключения режимов трансмиссии. Оборудование 46 для выполнения операций переключения режимов трансмиссии включает в себя нефиксируемый рычаг 48 переключения режимов трансмиссии, который переводится во множество рабочих позиций Psh переключения режимов трансмиссии, и P-переключатель 50. При нефиксируемом типе, когда рычаг 48 переключения режимов трансмиссии, управляемый водителем, отпускается, рычаг 48 переключения режимов трансмиссии возвращается в предварительно установленную исходную позицию (M-позицию). Соответственно, каждая из рабочих позиций Psh переключения режимов трансмиссии представляет собой рабочую позицию, которая определяется на основе операции рычага 48 переключения режимов трансмиссии и P-переключателя 50 водителем и не всегда совпадает с позицией рычага 48 переключения режимов трансмиссии.
[0036] Рычаг 48 переключения режимов трансмиссии переводится в одну из R-позиции, N-позиции, D-позиции, M-позиции и B-позиции. R-позиция, N-позиция и D-позиция представляют собой три рабочие позиции Psh переключения режимов трансмиссии, которые размещаются в направлении спереди назад транспортного средства 10, т.е. в продольном направлении транспортного средства, и M-позиция и B-позиция размещаются параллельно трем рабочим позициям Psh переключения режимов трансмиссии. Рычаг 48 переключения режимов трансмиссии может управляться в продольном направлении транспортного средства между R-позицией, N-позицией и D-позицией и может управляться в продольном направлении транспортного средства между M-позицией и B-позицией. Рычаг 48 переключения режимов трансмиссии может управляться в поперечном направлении транспортного средства, ортогональном к продольному направлению транспортного средства, между N-позицией и M-позицией.
[0037] В дальнейшем описывается каждая рабочая позиция Psh переключения режимов трансмиссии. Когда рычаг 48 переключения режимов трансмиссии переводится в R-позицию, устройство 14 трансмиссии с переключаемыми режимами переключается на диапазон заднего хода (R-диапазон), в котором устройство 14 трансмиссии с переключаемыми режимами инструктирует транспортному средству 10 двигаться задним ходом. Когда рычаг 48 переключения режимов трансмиссии переводится в N-позицию, устройство 14 трансмиссии с переключаемыми режимами переключается на диапазон нейтрали (N-диапазон), в котором тракт передачи мощности в устройстве 14 трансмиссии с переключаемыми режимами блокируется. Когда рычаг 48 переключения режимов трансмиссии переводится в D-позицию, устройство 14 трансмиссии с переключаемыми режимами переключается на диапазон переднего хода (D-диапазон), в котором устройство 14 трансмиссии с переключаемыми режимами инструктирует транспортному средству 10 двигаться передним ходом. Когда рычаг 48 переключения режимов трансмиссии переводится в B-позицию, устройство 14 трансмиссии с переключаемыми режимами переключается на диапазон торможения, в котором формируется торможение двигателем.
[0038] Например, P-переключатель 50 представляет собой нажимной кнопочный переключатель. Когда P-переключатель 50 нажимается, механизм 29 блокировки при парковке приводится в действие через актуатор 28, в случае если предварительно определенное условие удовлетворяется, например, в случае если скорость V транспортного средства для транспортного средства 10 является чрезвычайно низкой скоростью транспортного средства. В это время, вращение выходной шестерни 16 механически запрещается, и в силу этого вращение передних колес 24, механически сцепленных с выходной шестерней 16, также запрещается, так что устройство 14 трансмиссии с переключаемыми режимами переключается на диапазон парковки (P-диапазон), в котором транспортное средство 10 паркуется.
[0039] Как показано на фиг. 1, в транспортном средстве 10, рычаг 48 переключения режимов трансмиссии оборудования 46 для выполнения операций переключения режимов трансмиссии не сцепляется механически с устройством 14 трансмиссии с переключаемыми режимами. Технология переключения режимов трансмиссии по проводам, в которой рычаг 48 переключения режимов трансмиссии соединен с устройством 14 трансмиссии с переключаемыми режимами через электрический провод, применяется к транспортному средству 10.
[0040] Во внутренней части оборудования 46 для выполнения операций переключения режимов трансмиссии, предоставляются четыре IC 49 Холла, показанные посредством пунктирных линий, которые функционируют в качестве датчика, чтобы обнаруживать рабочие позиции Psh переключения режимов трансмиссии. Когда рычаг 48 переключения режимов трансмиссии управляется водителем, соответствующие относительные позиции между непроиллюстрированным магнитом, закрепленным на рычаге 48 переключения режимов трансмиссии, и IC 49 Холла изменяются, и в силу этого значения напряжения, которые должны выводиться из IC 49 Холла, изменяются. Значение напряжения, когда рычаг 48 переключения режимов трансмиссии переводится в рабочую позицию Psh переключения режимов трансмиссии, оценивается и сохраняется для каждой IC 49 Холла заранее. Рабочая позиция Psh переключения режимов трансмиссии рычага 48 переключения режимов трансмиссии определяется посредством определения значения напряжения для каждой IC 49 Холла. Значение напряжения для каждой рабочей позиции Psh переключения режимов трансмиссии IC 49 Холла задается таким образом, что оно имеет предварительно определенную ширину, с учетом варьирования между частями и т.п.
[0041] Поскольку четыре IC 49 Холла предоставляются, даже в случае, если одна из IC 49 Холла является неисправной, определение рабочей позиции Psh переключения режимов трансмиссии может выполняться на основе других трех IC 49 Холла. Например, в случае если одна из IC 49 Холла является неисправной, другие три IC 49 Холла выводят значения напряжения, соответствующие идентичной рабочей позиции Psh переключения режимов трансмиссии, и в силу этого обнаружение рабочей позиции Psh переключения режимов трансмиссии может выполняться посредством трех IC 49 Холла. В этом случае, хотя определяется то, что одна из IC 49 Холла является неисправной, транспортное средство 10 может двигаться на основе рабочей позиции Psh переключения режимов трансмиссии, обнаруженной посредством трех IC 49 Холла.
[0042] В случае если две IC 49 Холла являются неисправными, рабочая позиция Psh переключения режимов трансмиссии обнаруживается на основе других двух IC 49 Холла. Тем не менее, в случае если надежность рабочей позиции Psh переключения режимов трансмиссии, обнаруженной посредством двух IC 49 Холла, является низкой, определяется то, что анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии становится неопределенной, возникает. Таким образом, определяется то, что движение на основе рабочей позиции Psh переключения режимов трансмиссии, обнаруженной посредством оборудования 46 для выполнения операций переключения режимов трансмиссии, является затруднительным.
[0043] Транспортное средство 10 включает в себя множество ECU, которые функционируют в качестве электронного оборудования 52 управления транспортного средства 10. Электронное оборудование 52 управления управляет каждым устройством транспортного средства 10, как проиллюстрировано посредством устройства 14 трансмиссии с переключаемыми режимами. Электронное оборудование 52 управления включает в себя HV-ECU 54 для гибридного управления приведением в действие двигателя 12, первого электромотора MG1 и второго электромотора MG2, ECU 56 переключения режимов трансмиссии по проводам, который управляет диапазоном движения (диапазоном переключения режимов трансмиссии) устройства 14 трансмиссии с переключаемыми режимами, ECU 58 рулевого управления, который управляет электромотором 40, составляющим систему рулевого управления с электроусилителем руля, ECU 60 тормоза, который управляет тормозными гидравлическими цилиндрами 42 для регулирования тормозной мощности колесных тормозов 44, и ECU 64 автоматического вождения для выполнения управления автоматическим вождением, описанного далее. Например, каждый ECU выполнен с возможностью включать в себя так называемый микрокомпьютер, имеющий CPU, RAM, ROM, интерфейс ввода-вывода и т.п. CPU выполняет различные виды управления для транспортного средства 10 посредством выполнения обработки сигналов в соответствии с программами, сохраненными в ROM заранее, при одновременном использовании функции временного хранения RAM.
[0044] HV-ECU 54 имеет функцию для того, чтобы выводить требуемую мощность приведения в движение, которая требуется водителем, и управлять двигателем 12, первым электромотором MG1 и вторым электромотором MG2 в зависимости от состояния движения транспортного средства, так что эффективность использования топлива оптимизирована. HV-ECU 54 выводит, например, сигнал Se команды управления выходной мощностью двигателя для управления выходной мощностью двигателя 12 и сигнал Sm команды управления электромотором для управления приведением в действие первого электромотора MG1 и второго электромотора MG2, который представляет собой сигнал, который должен выводиться в инвертор 62.
[0045] ECU 56 переключения режимов трансмиссии по проводам имеет функцию для того, чтобы обнаруживать рабочую позицию Psh переключения режимов трансмиссии на основе сигнала, указывающего рабочую позицию Psh переключения режимов трансмиссии, выводимого из IC 49 Холла оборудования 46 для выполнения операций переключения режимов трансмиссии, и переключать диапазон движения устройства 14 трансмиссии с переключаемыми режимами на основе обнаруженной рабочей позиции Psh переключения режимов трансмиссии. Например, когда рычаг 48 переключения режимов трансмиссии переводится в D-позицию, ECU 56 переключения режимов трансмиссии по проводам выводит, в HV-ECU 54, сигнал Sshift переключения режимов трансмиссии для переключения диапазона движения на диапазон переднего хода, в котором устройство 14 трансмиссии с переключаемыми режимами инструктирует транспортному средству 10 двигаться передним ходом. В ответ на этот сигнал, HV-ECU 54 выводит сигнал Se команды управления выходной мощностью двигателя и сигнал Sm команды управления электромотором таким образом, чтобы инструктировать транспортному средству 10 двигаться передним ходом. Например, когда P-переключатель 50 нажимается, ECU 56 переключения режимов трансмиссии по проводам выводит сигнал Spk команды управления блокировкой при парковке для приведения в действие актуатора 28, приведения в действие механизма 29 блокировки при парковке и переключения диапазона движения транспортного средства 10 на диапазон парковки. В этой связи, когда P-переключатель 50 нажимается, сигнал, указывающий то, что P-переключатель 50 нажат, может выводиться в ECU 56 переключения режимов трансмиссии по проводам, отдельно от сигнала, указывающего рабочую позицию Psh переключения режимов трансмиссии. ECU 56 переключения режимов трансмиссии по проводам и IC 49 Холла представляют собой пример оборудования для обнаружения рабочей позиции, которое обнаруживает рабочую позицию оборудования для выполнения операций переключения режимов трансмиссии в изобретении.
[0046] ECU 58 рулевого управления имеет функцию для того, чтобы формировать вспомогательную мощность, соответствующую скорости транспортного средства и рабочему углу, эквивалентному рабочей величине руля 30 водителем. Когда водитель поворачивает руль 30, ECU 58 рулевого управления выводит, в электромотор 40, сигнал Sst команды усиления для формирования вспомогательной мощности, соответствующей рабочей величине руля 30.
[0047] ECU 60 тормоза имеет функцию для того, чтобы вырабатывать тормозную мощность, соответствующую состоянию движения, посредством управления гидравлическим давлением тормозного гидравлического цилиндра 42. Например, когда определяется, из скорости нажатия педали тормоза и т.п., то, что внезапное торможение выполнено, ECU 60 тормоза выводит сигнал управления тормозом Sbk для увеличения гидравлического давления тормозного гидравлического цилиндра 42, чтобы увеличивать тормозную мощность. Дополнительно, когда ECU 60 тормоза принимает команду для того, чтобы приводить в действие электрический парковочный тормоз 47, ECU 60 тормоза выводит, в электромотор 45, сигнал Spbk приведения в действие электрического парковочного тормоза для приведения в действие электрического парковочного тормоза 47.
[0048] ECU 64 автоматического вождения имеет функцию для того, чтобы выполнять автоматическое вождение транспортного средства 10 в заданный пункт назначения на основе пункта назначения (информации пункта назначения), текущей позиции (информации текущей позиции) и т.п., в случае переключения на автоматическое вождение. Переключение на автоматическое вождение выполняется посредством нажатия переключателя 65 автоматического вождения, который предоставляется рядом с водительским сиденьем. Когда переключатель 65 автоматического вождения нажимается снова в ходе автоматического вождения, или когда одно из руля 30, педали акселератора и педали тормоза нажимается водителем в ходе автоматического вождения, переключение с автоматического вождения на вождение вручную (нормальное вождение) выполняется.
[0049] Из датчика 66 распознавания окрестностей (инфракрасного датчика, камеры и т.п.), ECU 64 автоматического вождения принимает множество видов информации относительно периферии транспортного средства 10, как проиллюстрировано посредством информации относительно помехи в периферии транспортного средства 10 и информации того, имеется или нет транспортное средство, которое движется впереди или сзади относительно транспортного средства 10 либо движется справа или слева относительно транспортного средства 10. Дополнительно, из датчика 67 состояния транспортного средства, ECU 64 автоматического вождения принимает множество видов информации, указывающей состояние транспортного средства, как проиллюстрировано посредством частоты Ne вращения двигателя для двигателя 12, степени θ th открытия дросселя, диапазона движения, частоты Nmg1 вращения первого электромотора MG1, частоты Nmg2 вращения второго электромотора MG2, скорости V транспортного средства и угла θ wheel поворота при рулении руля 30. Дополнительно, из датчика 69 состояния водителя, ECU 64 автоматического вождения принимает информацию относительно состояния вождения водителя (состояния водителя), как проиллюстрировано посредством информации того, нажата или нет педаль акселератора, информации того, нажата или нет педаль тормоза, и информации того, повернут или нет руль 30. Датчик 66 распознавания окрестностей состоит из множества датчиков, таких как инфракрасный датчик и камера, и датчик 67 состояния транспортного средства и датчик 69 состояния водителя также состоит из множества датчиков, которые обнаруживают состояние транспортного средства, и множества датчиков, которые обнаруживают состояние водителя, соответственно.
[0050] ECU 64 автоматического вождения выводит сигнал Sdrive команды управления мощностью приведения в движение, который представляет собой сигнал для регулирования мощности приведения в движение в ходе автоматического вождения, и который выводится в HV-ECU 54, сигнал Ssftch команды управления переключением диапазона движения при переключении режимов трансмиссии, который представляет собой сигнал для переключения диапазона движения в ходе автоматического вождения, и который выводится в ECU 56 переключения режимов трансмиссии по проводам, сигнал Ssteer команды управления рулением, который представляет собой сигнал для регулирования угла θ wheel поворота при рулении руля 30 в ходе автоматического вождения, и который выводится в ECU 58 рулевого управления, и сигнал Sbrake команды управления тормозной мощностью, который представляет собой сигнал для регулирования тормозной мощности колесного тормоза 44 в ходе автоматического вождения, и который выводится в ECU 60 тормоза.
[0051] Фиг. 2 является функциональной блок-схемой для описания главной части функции управления электронным оборудованием 52 управления на фиг. 1. Электронное оборудование 52 управления на фиг. 1 состоит из множества ECU, включающих в себя HV-ECU 54, ECU 56 переключения режимов трансмиссии по проводам, ECU 58 рулевого управления, ECU 60 тормоза и ECU 64 автоматического вождения. Тем не менее, на фиг. 2, электронное оборудование 52 управления проиллюстрировано в качестве одного электронного оборудования 52 управления, имеющего различные функции управления.
[0052] Устройство 71 управления переключением диапазона движения выполняет управление для переключения диапазона движения устройства 14 трансмиссии с переключаемыми режимами на основе рабочей позиции Psh переключения режимов трансмиссии, обнаруженной посредством оборудования 46 для выполнения операций переключения режимов трансмиссии. Предпочтительно, устройство 71 управления переключением диапазона движения должно быть функционально включено в ECU 56 переключения режимов трансмиссии по проводам. Устройство 71 управления переключением диапазона движения представляет собой пример устройства управления в изобретении.
[0053] Когда рабочая позиция Psh переключения режимов трансмиссии переключается, устройство 71 управления переключением диапазона движения выводит команду для того, чтобы выводить мощность приведения в движение, соответствующую рабочей позиции Psh переключения режимов трансмиссии, в гибридное устройство 73 управления. Когда P-переключатель 50 нажимается водителем, устройство 71 управления переключением диапазона движения выводит команду для того, чтобы переключать устройство 14 трансмиссии с переключаемыми режимами на диапазон нейтрали, в гибридное устройство 73 управления и переключает устройство 14 трансмиссии с переключаемыми режимами на P-диапазон, в котором выходная шестерня 16 устройства 14 трансмиссии с переключаемыми режимами фиксируется таким образом, что выходная шестерня 16 не может вращаться посредством приведения в действие механизма 29 блокировки при парковке через актуатор 28.
[0054] Например, гибридное устройство 73 управления управляет движением транспортного средства 10, посредством избирательного переключения режима движения в зависимости от состояния движения, между режимом движения за счет электромотора, в котором двигатель 12 остановлен, и только второй электромотор MG2 используется в качестве источника мощности приведения в движение, режимом движения за счет двигателя (обычным режимом движения), в котором транспортное средство 10 движется в то время, когда выработка электричества первого электромотора MG1 используется для реакционной мощности в динамическую мощность двигателя 12 таким образом, что прямой крутящий момент двигателя передается в выходную шестерню 16, и в то время как второй электромотор MG2 приводится в действие посредством вырабатываемой электрической мощности первого электромотора MG1 таким образом, что крутящий момент передается в выходную шестерню 16, и вспомогательным режимом движения (режимом движения с ускорением), в котором транспортное средство 10 движется с дополнительным добавлением мощности приведения в движение второго электромотора MG2 с использованием электрической мощности из непроиллюстрированного аккумулятора в режиме движения за счет двигателя. Предпочтительно, гибридное устройство 73 управления должно быть функционально включено в HV-ECU 54.
[0055] Когда переключатель 65 автоматического вождения нажимается водителем таким образом, что автоматическое вождение выбирается, устройство 68 управления автоматическим вождением выполняет управление автоматическим вождением. Устройство 68 управления автоматическим вождением выполняет управление автоматическим вождением таким образом, чтобы инструктировать транспортному средству 10 двигаться в пункт назначения посредством управления двигателем 12 и первым и вторым электромотором MG1, MG2 и управления электромотором 40 и тормозным гидравлическим цилиндром 42 на основе информации относительно транспортного средства 10 из датчика 66 распознавания окрестностей, информации относительно состояния транспортного средства из датчика 67 состояния транспортного средства и информации относительно состояния водителя из датчика 69 состояния водителя. Предпочтительно, устройство 68 управления автоматическим вождением должно быть функционально включено в ECU 64 автоматического вождения.
[0056] Устройство 68 управления автоматическим вождением автоматически задает целевое состояние движения на основе множества настроек, таких как пункт назначения, введенный водителем, режим движения (режим с предпочтением по времени/режим с предпочтением по эффективности использования топлива) и заданная скорость транспортного средства, картографическая информация, включающая в себя позицию транспортного средства (GPS), состояние дороги, к примеру, искривление, градиент, высота и разрешенная скорость, информация инфраструктуры, целевой маршрут и целевой курс, погода, информация дороги, включающая в себя полосу движения проезжей дороги, полученную посредством распознавания курса, датчика 66 распознавания окрестностей и т.п., дорожный знак на проезжей дороге и пешеход на проезжей дороге. Например, картографическая информация, информация инфраструктуры и информация дороги основаны на информации, сохраненной в навигационном оборудовании 75, которое функционирует в качестве оборудования навигации на основе инструкций по намеченному маршруту, и информации, полученной посредством связи с наружной частью транспортного средства 10.
[0057] Устройство 68 управления автоматическим вождением выполняет управление автоматическим вождением посредством автоматического выполнения ускорения, замедления, торможения и руления на основе целевого состояния движения. Например, устройство 68 управления автоматическим вождением вычисляет F/F-мощность приведения в движение при управлении с прямой связью (F/F-управлении) на основе целевого состояния движения и F/B-мощность приведения в движение при управлении с обратной связью (F/B-управлении) на основе разности скоростей транспортного средства между целевой скоростью транспортного средства и фактической скоростью V транспортного средства. Затем, устройство 68 управления автоматическим вождением вычисляет требуемую мощность приведения в движение или требуемую тормозную мощность на основе полной мощности приведения в движение из F/F-мощности приведения в движение и F/B-мощности приведения в движение и величины сопротивления движению.
[0058] Устройство 68 управления автоматическим вождением выводит, в HV-ECU 54, команду для того, чтобы управлять двигателем 12 и электромоторами MG1, MG2 таким образом, что получается требуемая мощность приведения в движение (или движущий крутящий момент) или требуемая тормозная мощность (или тормозной крутящий момент). Устройство 68 управления автоматическим вождением вычисляет требуемую тормозную мощность ножного тормоза в применимом диапазоне и выводит, в тормозной гидравлический цилиндр 42, тормозной сигнал Sbk для управления тормозным крутящим моментом таким образом, что получается требуемая тормозная мощность. Как результат, двигатель 12, электромоторы MG1, MG2 и передаточное отношение устройства 14 трансмиссии с переключаемыми режимами управляются таким образом, что получаются требуемая мощность приведения в движение и требуемая тормозная мощность. Дополнительно, устройство 68 управления автоматическим вождением вычисляет требуемый угол поворота при рулении на основе целевого состояния движения, полосы движения проезжей дороги, пешехода на проезжей дороге, транспортного средства на проезжей дороге и т.п. и выводит команду для того, чтобы управлять углом вращения электромотора 40 таким образом, что получается требуемый угол поворота при рулении.
[0059] Когда устройство 68 управления автоматическим вождением определяет операцию переключения на автоматическое вождение посредством нажатия переключателя 65 автоматического вождения водителем, устройство 68 управления автоматическим вождением определяет то, введен или нет пункт назначения для автоматического вождения заранее. Пункт назначения соответствует пункту назначения, сохраненному в навигационном оборудовании 75 (в оборудовании навигации на основе инструкций по намеченному маршруту) заранее. В случае если пункт назначения введен в навигационное оборудование 75, устройство 68 управления автоматическим вождением автоматически создает намеченный маршрут движения в пункт назначения на основе намеченных маршрутов движения, введенных в навигационное оборудование 75, и инструктирует транспортному средству 10 автоматически двигаться по созданному намеченному маршруту.
[0060] В случае если пункт назначения не введен, устройство 68 управления автоматическим вождением уведомляет водителя в отношении переключения на вождение вручную (нормальное вождение) через дисплей на приборной панели 77, предоставленной рядом с водительским сиденьем, и после этого выполняет переключение на вождение вручную.
[0061] Когда операция водителем обнаруживается в ходе автоматического вождения, устройство 68 управления автоматическим вождением выполняет переключение на вождение вручную. В частности, когда одна из операции нажатия педали акселератора, операции нажатия педали тормоза и операции поворота руля 30 обнаруживается в ходе автоматического вождения, устройство 68 управления автоматическим вождением отдает приоритет операции водителем и выполняет переключение на вождение вручную.
[0062] Когда транспортное средство 10 прибывает в пункт назначения, устройство 68 управления автоматическим вождением выполняет автоматическую парковку в случае, если парковочное место предоставляется. Устройство 68 управления автоматическим вождением извлекает парковочные места зоны парковки, в которых может парковаться транспортное средство 10, и отображает экран для выбора из извлеченных парковочных мест на мониторе 75a навигационного оборудования 75 таким образом, что водитель выбирает парковочное место, в котором водитель хочет парковать транспортное средство 10. Когда водитель выбирает парковочное место, устройство 68 управления автоматическим вождением перемещает транспортное средство 10 в выбранное парковочное место и выполняет управление автоматической парковкой для парковки транспортного средства 10 в парковочном месте. Например, устройство 68 управления автоматическим вождением надлежащим образом регулирует скорость V транспортного средства и угол θ wheel поворота при рулении таким образом, что транспортное средство 10 перемещается вдоль сигнальной линии дорожной разметки, нарисованной на парковочном месте.
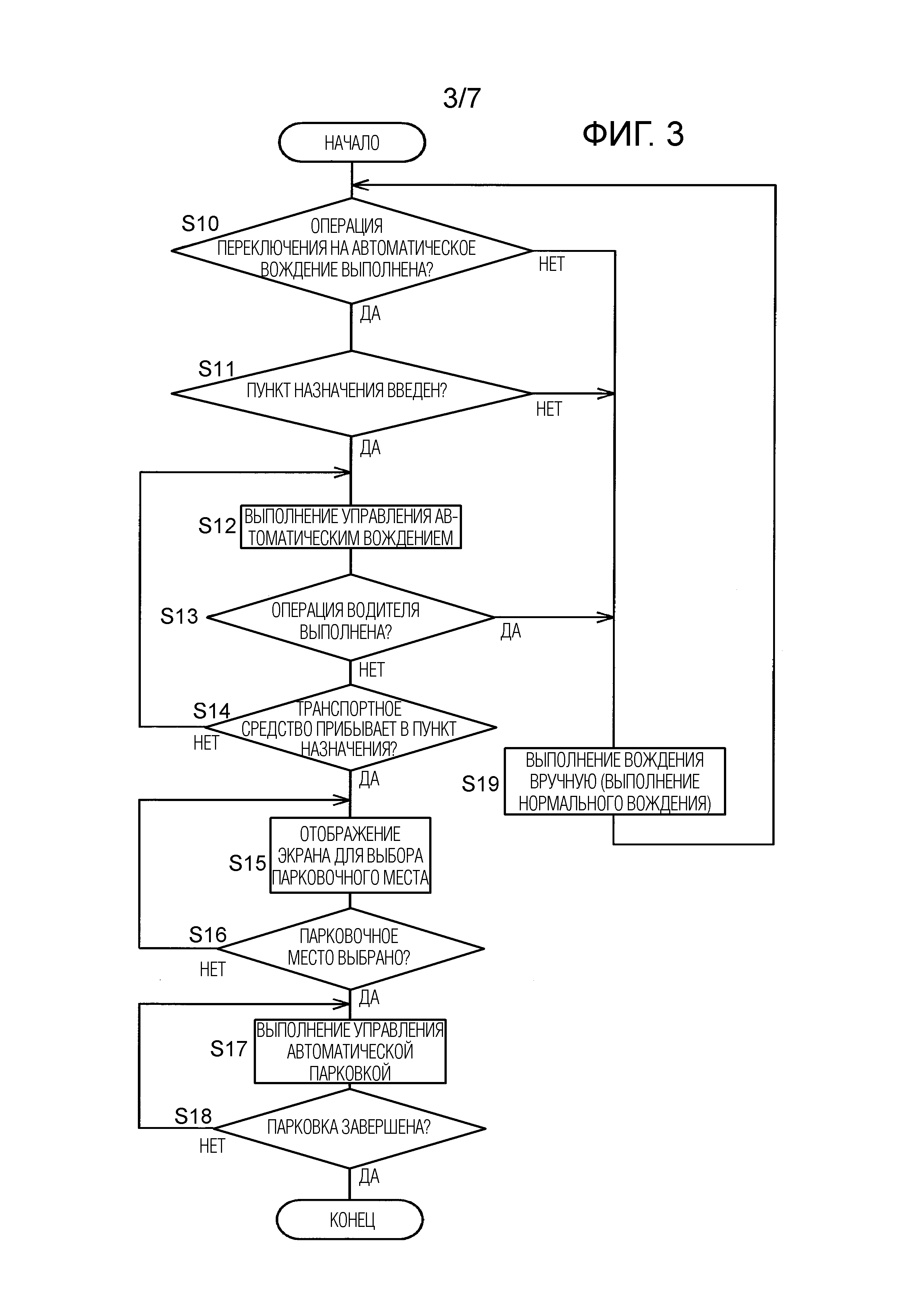
[0063] Фиг. 3 является блок-схемой последовательности операций способа для описания операции управления электронного оборудования 52 управления (ECU 64 автоматического вождения), которая представляет собой операцию управления в отношении автоматического вождения. Блок-схема последовательности операций способа многократно выполняется в ходе движения транспортного средства.
[0064] [0065] Во-первых, устройство 68 управления автоматическим вождением определяет то, выполнена или нет операция переключения на автоматическое вождение водителем посредством нажатия переключателя 65 автоматического вождения водителем, на этапе S10 (в дальнейшем в этом документе, "этап" опускается), соответствующем функции управления устройством 68 управления автоматическим вождением. В случае если переключатель 65 автоматического вождения не нажат, отрицательное определение выполняется на этапе S10, и вождение вручную (нормальное вождение) выполняется на этапе S19. В случае если переключатель 65 автоматического вождения нажат, положительное определение выполняется на этапе S10, и устройство 68 управления автоматическим вождением определяет то, введен или нет пункт назначения, на этапе S11, соответствующем функции управления устройством 68 управления автоматическим вождением. В случае если пункт назначения не введен, отрицательное определение выполняется на этапе S11, и вождение вручную выполняется на этапе S19. В случае если пункт назначения введен, положительное определение выполняется на этапе S11, и устройство 68 управления автоматическим вождением выполняет управление автоматическим вождением таким образом, чтобы инструктировать транспортному средству 10 двигаться в пункт назначения, на этапе S12, соответствующем функции управления устройством 68 управления автоматическим вождением.
Устройство 68 управления автоматическим вождением определяет то, выполнена или нет операция водителем (операция водителя) во время управления автоматическим вождением, на этапе S13, соответствующем функции управления устройством 68 управления автоматическим вождением. В случае если операция водителем выполнена, положительное определение выполняется на этапе S13, и переключение на вождение вручную выполняется на этапе S19. В случае если операция водителем не обнаружена, отрицательное определение выполняется на этапе S13, и устройство 68 управления автоматическим вождением определяет то, прибывает или нет транспортное средство 10 в пункт назначения, на этапе S14, соответствующем функции управления устройством 68 управления автоматическим вождением. В случае если транспортное средство 10 не прибывает в пункт назначения, отрицательное определение выполняется на этапе S14. Процедура возвращается к этапу S12, и управление автоматическим вождением непрерывно выполняется.
[0066] В случае если транспортное средство 10 прибывает в пункт назначения, положительное определение выполняется на этапе S14, и устройство 68 управления автоматическим вождением отображает экран для выбора парковочного места, на мониторе 75a навигационного оборудования 75, на этапе S15, соответствующем функции управления устройством 68 управления автоматическим вождением. Устройство 68 управления автоматическим вождением определяет то, выбрано или нет парковочное место водителем, на этапе S16, соответствующем функции управления устройством 68 управления автоматическим вождением. В случае если парковочное место не выбрано, отрицательное определение выполняется на этапе S16. Процедура возвращается к этапу S15 и ожидает, тогда как экран для выбора парковочного места поддерживается до тех пор, пока парковочное место не будет выбрано.
[0067] В случае если парковочное место выбрано, положительное определение выполняется на этапе S16, и устройство 68 управления автоматическим вождением выполняет управление автоматическим вождением для транспортного средства 10 на этапе S17, соответствующем функции управления устройством 68 управления автоматическим вождением. Затем, устройство 68 управления автоматическим вождением определяет то, завершается или нет парковка, на этапе S18, соответствующем функции управления устройством 68 управления автоматическим вождением. В случае если парковка не завершается, отрицательное определение выполняется на этапе S18. Процедура возвращается к этапу S17, и управление автоматической парковкой непрерывно выполняется. В случае если парковка завершается, положительное определение выполняется на этапе S18, и процедура завершается. Хотя не показано на блок-схеме последовательности операций способа по фиг. 3, в случае если пункт назначения не введен во время переключения на автоматическое вождение, движение в режиме "ехать за", при котором транспортное средство 10 движется при следовании за транспортным средством, которое движется впереди транспортного средства 10, может выполняться.
[0068] Между тем, в случае если анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии оборудования 46 для выполнения операций переключения режимов трансмиссии становится неопределенной, возникает в ходе движения, в предшествующем уровне техники, текущий диапазон движения поддерживается до тех пор, пока операция рычага 48 переключения режимов трансмиссии не будет обнаружена, и диапазон движения переключается на N-диапазон, когда операция рычага 48 переключения режимов трансмиссии обнаруживается. Соответственно, в случае если рычаг 48 переключения режимов трансмиссии управляется, и диапазон движения переключается на N-диапазон до того, как транспортное средство 10 прибывает в соответствующее место стоянки для эвакуации, транспортное средство 10 не может двигаться в аварийном режиме движения. Анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии становится неопределенной в варианте осуществления, представляет собой пример анормальности при обнаружении в оборудовании для обнаружения рабочей позиции в изобретении.
[0069] Для решения этой проблемы, электронное оборудование 52 управления функционально включает в себя устройство 72 определения анормальностей, которое определяет то, возникает или нет анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии становится неопределенной, и устройство 70 управления движением в аварийном режиме, которое инструктирует транспортному средству 10 двигаться на основе информации пункта назначения и информации текущей позиции в случае, если устройство 72 определения анормальностей определяет то, что анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии становится неопределенной, возникает в ходе движения. Информация пункта назначения может включать в себя информацию относительно заданного пункта назначения и информацию в отношении того, что пункт назначения не задается.
[0070] Устройство 70 управления движением в аварийном режиме функционально включает в себя устройство 74 управления отображением, устройство 76 определения автоматического вождения, устройство 78 определения переключения, устройство 80 определения ввода пунктов назначения, устройство 82 определения состояния остановки, устройство 84 извлечения мест временной стоянки для эвакуации, устройство 86 определения выбора временной стоянки для эвакуации и устройство 88 разрешения на ввод.
[0071] Устройство 72 определения анормальностей определяет то, возникает или нет анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии становится неопределенной. Устройство 72 определения анормальностей определяет то, возникает или нет анормальность в IC 49 Холла для обнаружения рабочей позиции Psh переключения режимов трансмиссии оборудования 46 для выполнения операций переключения режимов трансмиссии. Например, в случае если три IC 49 Холла из четырех IC 49 Холла выводят значения напряжения, соответствующие идентичной рабочей позиции Psh переключения режимов трансмиссии, но оставшаяся одна IC 49 Холла выводит значение напряжения, соответствующее рабочей позиции Psh переключения режимов трансмиссии, отличающейся от рабочей позиции Psh переключения режимов трансмиссии для других трех IC 49 Холла, или в случае, если одна IC 49 Холла не выводит значение напряжения, устройство 72 определения анормальностей определяет то, что одна IC 49 Холла является неисправной. В это время, устройство 74 управления отображением отображает уведомление в отношении того, что анормальность возникает в одной IC 49 Холла, на приборной панели 77 рядом с водительским сиденьем.
[0072] Поскольку три IC 49 Холла выводят значения напряжения, соответствующие идентичной рабочей позиции Psh переключения режимов трансмиссии, в этом случае, определяется то, что операция переключения режимов трансмиссии в рабочую позицию Psh переключения режимов трансмиссии на основе значений напряжения трех IC 49 Холла выполнена. Таким образом, в случае если анормальность возникает в одной IC 49 Холла, устройство 72 определения анормальностей определяет то, что анормальность возникает в одной IC 49 Холла, но рабочая позиция Psh переключения режимов трансмиссии определяется на основе значений напряжения трех IC 49 Холла. Таким образом, вождение вручную непрерывно выполняется на основе рабочей позиции Psh переключения режимов трансмиссии, которая обнаруживается посредством трех IC 49 Холла.
[0073] В случае если две IC 49 Холла из четырех IC 49 Холла выводят значения напряжения, соответствующие идентичной рабочей позиции Psh переключения режимов трансмиссии, но другие две IC 49 Холла выводят значения напряжения, соответствующие отличающимся рабочим позициям Psh переключения режимов трансмиссии относительно друг друга, устройство 72 определения анормальностей определяет то, что анормальность возникает в двух IC 49 Холла. Дополнительно, в случае если две IC 49 Холла выводят значения напряжения, соответствующие идентичной рабочей позиции Psh переключения режимов трансмиссии, имеется вероятность того, что операция переключения режимов трансмиссии в идентичную рабочую позицию Psh переключения режимов трансмиссии не выполнена. Следовательно, в этом случае, устройство 72 определения анормальностей определяет то, что анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии после операции переключения режимов трансмиссии становится неопределенной, возникает.
[0074] В случае если устройство 72 определения анормальностей определяет то, что анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии оборудования 46 для выполнения операций переключения режимов трансмиссии становится неопределенной, возникает в ходе движения, устройство 70 управления движением в аварийном режиме выполняет управление таким образом, чтобы инструктировать транспортному средству 10 двигаться независимо от операции оборудования 46 для выполнения операций переключения режимов трансмиссии водителем. Ниже описывается способ управления устройства 70 управления движением в аварийном режиме в случае, если анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии становится неопределенной, возникает.
[0075] В случае если устройство 72 определения анормальностей определяет то, что рабочая позиция Psh переключения режимов трансмиссии становится неопределенной, например, вследствие возникновения анормальности двух IC 49 Холла, устройство 74 управления отображением, для водителя, отображает уведомление в отношении того, что управление движением в аварийном режиме может выполняться, на приборной панели 77 рядом с водительским сиденьем. Уведомление может выдаваться не только посредством отображения на экране, но также и посредством голоса. Устройство 74 управления отображением соответствует устройству выдачи уведомлений в изобретении.
[0076] В случае если устройство 72 определения анормальностей определяет возникновение такой анормальности при обнаружении, что рабочая позиция Psh переключения режимов трансмиссии становится неопределенной, устройство 76 определения автоматического вождения определяет то, выполняется или нет автоматическое вождение транспортного средства 10 посредством устройства 68 управления автоматическим вождением. В случае если автоматическое вождение выполняется, устройство 70 управления движением в аварийном режиме выводит команду для того, чтобы продолжать автоматическое вождение в устройство 68 управления автоматическим вождением. Таким образом, в случае если автоматическое вождение выполняется, устройство 70 управления движением в аварийном режиме продолжает автоматическое вождение в качестве движения в аварийном режиме. Кроме того, устройство 74 управления отображением отображает уведомление в отношении того, что анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии становится неопределенной и переключение на вождение вручную является невозможным, на приборной панели 77 рядом с водительским сиденьем.
[0077] С другой стороны, в случае если вождение вручную выполняется посредством устройства 76 определения автоматического вождения, устройство 74 управления отображением отображает дисплей для навигации на основе инструкций при автоматическом вождении для уведомления в отношении того, что автоматическое вождение необходимо для продолжения движения, на приборной панели 77 рядом с водительским сиденьем.
[0078] В случае если устройство 72 определения анормальностей определяет то, что рабочая позиция Psh переключения режимов трансмиссии является неопределенной, устройство 78 определения переключения определяет то, выполнено или нет переключение с вождения вручную на автоматическое вождение водителем. В случае если переключатель 65 автоматического вождения нажимается после того, как дисплей для навигации на основе инструкций при автоматическом вождении отображается на приборной панели 77, устройство 78 определения переключения определяет то, что переключение на автоматическое вождение выполнено. В случае если переключение на автоматическое вождение выполнено водителем, устройство 70 управления движением в аварийном режиме выводит, в устройство 68 управления автоматическим вождением, команду для того, чтобы инструктировать транспортному средству 10 двигаться под управлением автоматическим вождением, т.е. выполнять автоматическое вождение транспортного средства 10 на основе информации пункта назначения и текущей позиции. Ниже описывается управление автоматическим вождением в случае, если рабочая позиция Psh переключения режимов трансмиссии является неопределенной.
[0079] В случае если переключение на автоматическое вождение не выполнено водителем, устройство 70 управления движением в аварийном режиме определяет то, представляет текущий диапазон движения собой D-диапазон или нет, который представляет собой диапазон переднего хода. В случае если устройство 70 управления движением в аварийном режиме определяет то, что диапазон движения представляет собой D-диапазон, устройство 70 управления движением в аварийном режиме определяет то, равна или выше либо нет скорость V транспортного средства предварительно определенной скорости V1 транспортного средства. Предварительно определенная скорость V1 транспортного средства составляет значение, которое оценивается на основе экспериментов или расчетов заранее и задается равным низкому значению, обеспечивающему возможность определения того, что водитель намеревается останавливать транспортное средство 10. В случае если скорость V транспортного средства для транспортного средства 10 равна или выше предварительно определенной скорости V1 транспортного средства, устройство 70 управления движением в аварийном режиме инструктирует транспортному средству 10 непрерывно двигаться при поддержании D-диапазона.
[0080] С другой стороны, в случае если скорость V транспортного средства ниже предварительно определенной скорости V1 транспортного средства, устройство 70 управления движением в аварийном режиме переключает диапазон движения на N-диапазон и останавливает транспортное средство 10. Когда транспортное средство 10 останавливается, устройство 70 управления движением в аварийном режиме разрешает водителю управлять навигационным оборудованием 75 (вводить пункт назначения) и определяет то, управляется или нет навигационное оборудование 75. В случае если навигационное оборудование 75 управляется, устройство 70 управления движением в аварийном режиме определяет снова то, выполнена или нет операция переключения на автоматическое вождение водителем. В случае если переключение на автоматическое вождение выполнено, устройство 70 управления движением в аварийном режиме задает транспортное средство 10 в пункт назначения, введенный в навигационное оборудование 75. С другой стороны, в случае если навигационное оборудование 75 не управляется, устройство 70 управления движением в аварийном режиме определяет то, выключен или нет источник электрической мощности транспортного средства (IG-OFF), и в случае, если источник электрической мощности транспортного средства выключен, транспортное средство 10 паркуется.
[0081] Далее описывается управление, когда переключение на автоматическое вождение выполнено в случае, если устройство 72 определения анормальностей определяет возникновение такой анормальности при обнаружении, что рабочая позиция Psh переключения режимов трансмиссии становится неопределенной.
[0082] Когда переключение на автоматическое вождение выполнено, устройство 80 определения ввода пунктов назначения определяет то, введен или нет пункт назначения заранее в навигационное оборудование 75, которое задает намеченный маршрут движения в пункт назначения. В случае если пункт назначения введен заранее в навигационное оборудование 75, устройство 70 управления движением в аварийном режиме выводит, в устройство 68 управления автоматическим вождением, команду для того, чтобы выполнять управление автоматическим вождением таким образом, чтобы инструктировать транспортному средству 10 двигаться в пункт назначения, введенный в навигационное оборудование 75, и управление автоматической парковкой для инструктирования транспортному средству 10 парковаться. В силу этого, поскольку автоматическое вождение транспортного средства 10 в пункт назначения выполняется в качестве движения в аварийном режиме, транспортное средство 10 переходит в аварийный режим движения быстро без остановки. Конкретные способы управления для управления автоматическим вождением и управления автоматической парковкой в случае, если пункт назначения введен, по существу являются идентичными вышеописанным видам управления, и в силу этого описания для способов управления опускаются.
[0083] С другой стороны, в случае если пункт назначения не введен в навигационное оборудование 75, устройство 82 определения состояния остановки определяет то, находится или нет транспортное средство 10 в состоянии остановки. В случае если устройство 82 определения состояния остановки определяет то, что транспортное средство 10 находится в состоянии остановки, устройство 88 разрешения на ввод разрешает водителю управлять навигационным оборудованием 75, в частности, вводить пункт назначения при управлении движением в аварийном режиме. Когда водитель управляет навигационным оборудованием 75 таким образом, что пункт назначения вводится водителем, устройство 70 управления движением в аварийном режиме выводит, в устройство 68 управления автоматическим вождением, команду для того, чтобы выполнять управление автоматическим вождением, в котором пункт назначения представляет собой пункт назначения, введенный в навигационное оборудование 75, и выполнять управление автоматической парковкой. В силу этого, в качестве движения в аварийном режиме транспортного средства 10, автоматическое движение и автоматическая парковка транспортного средства 10 выполняются на основе введенного пункта назначения и текущей позиции.
[0084] В случае если устройство 82 определения состояния остановки определяет то, что транспортное средство 10 движется, устройство 70 управления движением в аварийном режиме временно останавливает транспортное средство 10 на обочине дороги и т.п. После того, как транспортное средство 10 останавливается, устройство 84 извлечения мест временной стоянки для эвакуации извлекает место временной стоянки для эвакуации, подходящее для временной стоянки для эвакуации, на основе информации текущей позиции. Извлечение места временной стоянки для эвакуации может выполняться в то время, когда транспортное средство 10 движется.
[0085] Место временной стоянки для эвакуации задается в качестве безопасного места, в котором столкновение сзади с едущим сзади транспортным средством и т.п. избегается во время остановки транспортного средства 10. После того, как место временной стоянки для эвакуации извлекается, устройство 74 управления отображением переключает монитор 75a навигационного оборудования 75 на экран для выбора извлеченного места временной стоянки для эвакуации. В случае если только одно место временной стоянки для эвакуации извлекается, устройство 74 управления отображением отображает извлеченное место временной стоянки для эвакуации таким образом, что водитель может выполнять выбор, и в случае, если множество мест временной стоянки для эвакуации извлекаются, устройство 74 управления отображением отображает некоторые места временной стоянки для эвакуации таким образом, что водитель может выполнять выбор. Место временной стоянки для эвакуации включено в информацию пункта назначения в изобретении.
[0086] Устройство 86 определения выбора временной стоянки для эвакуации определяет то, выбрано или нет место временной стоянки для эвакуации водителем. Например, когда место временной стоянки для эвакуации, отображаемое на мониторе 75a навигационного оборудования 75, выбрано водителем, устройство 86 определения выбора временной стоянки для эвакуации определяет то, что место временной стоянки для эвакуации выбрано. После того, как место временной стоянки для эвакуации выбрано, устройство 70 управления движением в аварийном режиме выводит команду таким образом, чтобы инструктировать транспортному средству 10 двигаться в выбранное место временной стоянки для эвакуации, в устройство 68 управления автоматическим вождением. В силу этого, автоматическое вождение транспортного средства 10 в место временной стоянки для эвакуации выполняется, и автоматическая парковка выполняется. Конкретные способы управления для управления автоматическим вождением транспортного средства 10 в место временной стоянки для эвакуации и управления автоматической парковкой по существу являются идентичными вышеописанным видам управления в случае, если пункт назначения введен, и в силу этого описания для способов управления опускаются.
[0087] Посредством временной остановки транспортного средства 10 во время выбора места временной стоянки для эвакуации таким образом, водитель может безопасно выбирать место временной стоянки для эвакуации и может выбирать место временной стоянки для эвакуации, которое является удобным для водителя. Дополнительно, поскольку транспортное средство 10 движется в место временной стоянки для эвакуации посредством выбора места временной стоянки для эвакуации, водитель, после этого, может управлять навигационным оборудованием 75 и вводить пункт назначения в безопасном месте.
[0088] В вышеприведенном примере, место временной стоянки для эвакуации выбирается в то время, когда транспортное средство 10 находится временно в состоянии остановки на обочине дороги и т.п., и затем, транспортное средство 10 автоматически осуществляет вождение в место временной стоянки для эвакуации. Тем не менее, место временной стоянки для эвакуации может извлекаться в ходе движения, и транспортное средство 10 может автоматически двигаться в автоматически извлеченное предварительно определенное место временной стоянки для эвакуации. В частности, в случае если устройство 72 определения анормальностей определяет то, что анормальность при обнаружении возникает в ходе движения, устройство 70 управления движением в аварийном режиме задает соответствующее место временной стоянки для эвакуации на основе информации текущей позиции и выполняет управление автоматическим вождением в заданное место временной стоянки для эвакуации. Посредством автоматического выполнения переключения на управление автоматическим вождением в ходе движения таким образом, транспортное средство 10 может двигаться в место временной стоянки для эвакуации без остановки временно. Дополнительно, посредством продолжения движения в соответствии с потоком движения в периферии, можно снижать риск столкновения с едущим сзади транспортным средством.
[0089] Когда транспортное средство 10 прибывает в место временной стоянки для эвакуации, транспортное средство 10 останавливается. Устройство 88 разрешения на ввод разрешает водителю управлять навигационным оборудованием 75, и в силу этого водитель может вводить пункт назначения с использованием навигационного оборудования 75. В дополнение к пункту назначения, непосредственно вводимому водителем, например, по меньшей мере, одно из ритейлера (дилера) по продаже автомобилей и ремонтной мастерской может выбираться в качестве возможного варианта пункта назначения.
[0090] Причина, по которой ритейлер по продаже автомобилей и ремонтная мастерская задаются в качестве возможного варианта пункта назначения, заключается в том, что необходимо направлять водителя для быстрого ремонта транспортного средства 10, поскольку рабочая позиция Psh переключения режимов трансмиссии является неопределенной, и в силу этого вождение вручную является невозможным. Дополнительно, для водителя необязательно извлекать дилера по продаже автомобилей и ремонтную мастерскую для ремонта транспортного средства 10.
[0091] Когда пункт назначения введен водителем, устройство 70 управления движением в аварийном режиме выводит команду для того, чтобы выполнять автоматическое вождение транспортного средства 10 во введенный пункт назначения и автоматическую парковку, в устройство 68 управления автоматическим вождением. В ответ на эту команду, устройство 68 управления автоматическим вождением выполняет автоматическое вождение транспортного средства 10 в пункт назначения и выполняет автоматическую парковку транспортного средства 10 в предварительно определенном парковочном месте.
[0092] После того, как транспортное средство 10 прибывает в пункт назначения, и затем парковка транспортного средства 10 завершается, устройство 74 управления отображением отображает предупреждение, указывающее то, что вождение вручную является невозможным, и ремонт транспортного средства 10 необходим, на приборной панели 77. В силу этого, водитель может знать состояние транспортного средства 10 и может выполнять соответствующий отклик, такой как задание дилера или ремонтной мастерской в качестве следующего пункта назначения.
[0093] Фиг. 4 является блок-схемой последовательности операций способа для описания операции управления электронного оборудования 52 управления в случае, если анормальность при обнаружении рабочей позиции Psh переключения режимов трансмиссии возникает в ходе движения. Блок-схема последовательности операций способа многократно выполняется в ходе движения транспортного средства.
[0094] Во-первых, устройство 72 определения анормальностей определяет то, возникает или нет анормальность в IC 49 Холла, которые функционируют в качестве датчика позиции переключения режимов трансмиссии оборудования 46 для выполнения операций переключения режимов трансмиссии, на этапе S30, соответствующем функции управления устройством 72 определения анормальностей. В случае если устройство 72 определения анормальностей определяет то, что все IC 49 Холла являются нормальными, отрицательное определение выполняется на этапе S30. Процедура возвращается к этапу S30, и идентичное определение многократно выполняется.
[0095] В случае если положительное определение выполняется на этапе S30, устройство 74 управления отображением отображает уведомление относительно возникновения анормальности IC 49 Холла, на приборной панели 77 рядом с водительским сиденьем, на этапе S31, соответствующем функции управления устройством 74 управления отображением. Устройство 72 определения анормальностей определяет то, может или нет рабочая позиция Psh переключения режимов трансмиссии рычага 48 переключения режимов трансмиссии обнаруживаться, на этапе S32, соответствующем функции управления устройством 72 определения анормальностей. В случае если рабочая позиция Psh переключения режимов трансмиссии рычага 48 переключения режимов трансмиссии может обнаруживаться, положительное определение выполняется на этапе S32, и процедура возвращается к этапу S30. Случай, в котором анормальность IC 49 Холла определяется на этапе S30, и в котором рабочая позиция Psh переключения режимов трансмиссии может обнаруживаться на этапе S32, соответствует случаю, в котором анормальность обнаружена в одной из IC 49 Холла.
[0096] В случае если рабочая позиция Psh переключения режимов трансмиссии рычага 48 переключения режимов трансмиссии не может обнаруживаться, отрицательное определение выполняется на этапе S32, и устройство 76 определения автоматического вождения определяет то, выполняется или нет автоматическое вождение, на этапе S33, соответствующем функции управления устройством 76 определения автоматического вождения. В случае если автоматическое вождение выполняется, положительное определение выполняется на этапе S33, и устройство 74 управления отображением отображает уведомление в отношении того, что оборудование 46 для выполнения операций переключения режимов трансмиссии является неисправным, и движение посредством вождения вручную является невозможным, на приборной панели 77 рядом с водительским сиденьем, на этапе S34, соответствующем функции управления устройством 74 управления отображением. Дополнительно, устройство 68 управления автоматическим вождением непрерывно выполняет управление автоматическим вождением на этапе S35, соответствующем функции управления устройством 68 управления автоматическим вождением.
[0097] Возвращаясь к этапу S33, в случае если устройство 76 определения автоматического вождения определяет то, что вождение вручную выполняется, отрицательное определение выполняется на этапе S33, и устройство 74 управления отображением отображает уведомление (дисплей для навигации на основе инструкций при автоматическом вождении) в отношении того, что переключение с вождения вручную на автоматическое вождение необходимо, на приборной панели 77, на этапе S36, соответствующем функции управления устройством 74 управления отображением. Устройство 78 определения переключения определяет то, выполнена или нет операция переключения на автоматическое вождение водителем, на этапе S37, соответствующем функции управления устройством 78 определения переключения.
[0098] В случае если операция переключения в автоматическое вождение не выполнена, отрицательное определение выполняется на этапе S37. Устройство 70 управления движением в аварийном режиме определяет то, представляет текущий диапазон движения собой D-диапазон или нет, на этапе S38, соответствующем функции управления устройством 70 управления движением в аварийном режиме. В случае если диапазон движения отличается от D-диапазона, отрицательное определение выполняется на этапе S38. Процедура возвращается к этапу S37, и устройство 78 определения переключения определяет то, выполнена или нет операция переключения на автоматическое вождение. В случае если диапазон движения представляет собой D-диапазон, положительное определение выполняется на этапе S38, и устройство 70 управления движением в аварийном режиме определяет то, равна или выше либо нет скорость V транспортного средства предварительно определенной скорости V1 транспортного средства, на этапе S39, соответствующем функции управления устройством 70 управления движением в аварийном режиме. В случае если скорость V транспортного средства равна или выше предварительно определенной скорости V1 транспортного средства, положительное определение выполняется на этапе S39, устройство 70 управления движением в аварийном режиме непрерывно выполняет движение в D-диапазоне на этапе S40, соответствующем функции управления устройством 70 управления движением в аварийном режиме.
[0099] В случае если скорость V транспортного средства ниже предварительно определенной скорости V1 транспортного средства, отрицательное определение выполняется на этапе S39, и устройство 70 управления движением в аварийном режиме переключает диапазон движения на N-диапазон на этапе S41, соответствующем функции управления устройством 70 управления движением в аварийном режиме. Устройство 70 управления движением в аварийном режиме определяет то, остановлено или нет транспортное средство 10, на этапе S42, соответствующем функции управления устройством 70 управления движением в аварийном режиме. В случае если транспортное средство 10 не остановлено, отрицательное определение выполняется на этапе S42, и определение на этапе S42 многократно выполняется до тех пор, пока транспортное средство 10 не остановится. В случае если транспортное средство 10 остановлено, положительное определение выполняется на этапе S42, и устройство 70 управления движением в аварийном режиме разрешает операцию навигационного оборудования 75 на этапе S43. Устройство 70 управления движением в аварийном режиме определяет то, управляется или нет навигационное оборудование 75 водителем, в частности, то, введен или нет пункт назначения, на этапе S44, соответствующем функции управления устройством 70 управления движением в аварийном режиме. В случае если навигационное оборудование 75 управляется, положительное определение выполняется на этапе S44. Процедура возвращается к этапу S37, и устройство 78 определения переключения определяет снова то, выполнена или нет операция переключения на автоматическое вождение. В случае если навигационное оборудование 75 не управляется, отрицательное определение выполняется на этапе S44, и устройство 70 управления движением в аварийном режиме определяет то, выключен или нет источник электрической мощности транспортного средства (IG-OFF), на этапе S45, соответствующем функции управления устройством 70 управления движением в аварийном режиме. В случае если источник электрической мощности транспортного средства не выключен, отрицательное определение выполняется на этапе S45. Процедура возвращается к этапу S44, и устройство 70 управления движением в аварийном режиме определяет то, управляется или нет навигационное оборудование 75. В случае если источник электрической мощности транспортного средства выключен, положительное определение выполняется на этапе S45, и процедура завершается.
[0100] Возвращаясь к этапу S37, в случае если операция переключения на автоматическое вождение выполнена, положительное определение выполняется на этапе S37, и процедура переходит к этапу S46. В дальнейшем описывается операция управления на этапе S46 с использованием блок-схемы последовательности операций способа на фиг. 5.
[0101] Во-первых, устройство 80 определения ввода пунктов назначения определяет то, введен или нет пункт назначения в навигационное оборудование 75, на этапе S50, соответствующем функции управления устройством 80 определения ввода пунктов назначения. В случае если пункт назначения введен, положительное определение выполняется на этапе S50. Процедура переходит к этапу S51, и операции управления на этапе S51 и далее (S51-S55) выполняются. Операции управления на этапе S51-S55 по существу являются идентичными с вышеописанными управлением автоматическим вождением и управлением автоматической парковкой, показанными на этапе S12-S18 (за исключением S13) по фиг. 3, и в силу этого описания для операций управления опускаются.
[0102] В случае если пункт назначения не введен на этапе S50, отрицательное определение выполняется на этапе S50, и процедура переходит к этапу S56. Устройство 82 определения состояния остановки определяет то, находится или нет транспортное средство 10 в состоянии остановки, на этапе S56, соответствующем функции управления устройством 82 определения состояния остановки. В случае если транспортное средство 10 находится в состоянии остановки, положительное определение выполняется на этапе S56. Устройство 88 разрешения на ввод разрешает операцию навигационного оборудования 75 на этапе S61, соответствующем функции управления устройством 88 разрешения на ввод, и процедура возвращается к этапу S50. В случае если навигационное оборудование 75 управляется, и пункт назначения введен, положительное определение выполняется на этапе S50, и S51-S55 выполняются, так что автоматическое вождение в пункт назначения выполняется.
[0103] С другой стороны, в случае если транспортное средство движется на этапе S56, отрицательное определение выполняется на этапе S56, и устройство 70 управления движением в аварийном режиме временно останавливает транспортное средство 10, на этапе S57, соответствующем функции управления устройством 70 управления движением в аварийном режиме. Устройство 84 извлечения мест временной стоянки для эвакуации извлекает возможный вариант места временной стоянки для эвакуации на этапе S58, соответствующем функции управления устройством 84 извлечения мест временной стоянки для эвакуации, и устройство 74 управления отображением отображает экран для выбора извлеченного места временной стоянки для эвакуации, на мониторе 75a навигационного оборудования 75, на этапе S59, соответствующем функции управления устройством 74 управления отображением. Устройство 86 определения выбора временной стоянки для эвакуации определяет то, выбрано или нет место временной стоянки для эвакуации водителем, на этапе S60, соответствующем функции управления устройством 86 определения выбора временной стоянки для эвакуации. В случае если место временной стоянки для эвакуации выбрано водителем, положительное определение выполняется на этапе S60. Выбранное место временной стоянки для эвакуации задается в качестве пункта назначения, и операции управления на этапе S51-S55 выполняются, так что автоматическое вождение транспортного средства 10 в место временной стоянки для эвакуации выполняется. В случае если место временной стоянки для эвакуации не выбрано, отрицательное определение выполняется на этапе S60. Процедура возвращается к этапу S59, и устройство 74 управления отображением непрерывно отображает экран для выбора места временной стоянки для эвакуации таким образом, что водитель выбирает место временной стоянки для эвакуации. Когда транспортное средство 10 прибывает в место временной стоянки для эвакуации, пункт назначения вводится водителем, и автоматическое вождение во введенный пункт назначения выполняется. Таким образом, S50-S55 на блок-схеме последовательности операций способа по фиг. 5 выполняются снова.
[0104] На блок-схеме последовательности операций способа по фиг. 5, в случае если пункт назначения не введен, транспортное средство 10 временно останавливается на обочине дороги и т.п. даже в ходе движения. После этого, место временной стоянки для эвакуации извлекается, и место временной стоянки для эвакуации выбирается водителем. Тем не менее, место временной стоянки для эвакуации, подходящее для остановки, может извлекаться в ходе движения, и переключение на автоматическое вождение, в котором транспортное средство 10 движется в автоматически извлеченное место временной стоянки для эвакуации, может выполняться автоматически. В силу этого, транспортное средство 10 может двигаться в место временной стоянки для эвакуации без остановки. Дополнительно, выбор места временной стоянки для эвакуации может разрешаться в ходе движения, поскольку водитель не должен смотреть на монитор 75a в течение длительного времени. В случае если водитель не выбирает место временной стоянки для эвакуации, и если транспортное средство движется впереди транспортного средства 10, движение в режиме "ехать за", при котором транспортное средство 10 едет за транспортным средством, движущимся впереди транспортного средства 10, может выполняться в качестве движения в аварийном режиме.
[0105] Как описано выше, при использовании варианта осуществления, даже в случае возникновения анормальности при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии оборудования 46 для выполнения операций переключения режимов трансмиссии становится неопределенной, транспортное средство 10 движется на основе информации пункта назначения и информации текущей позиции и в силу этого может продолжать движение в аварийном режиме.
[0106] При использовании варианта осуществления, в случае если устройство 72 определения анормальностей определяет возникновение такой анормальности при обнаружении, что рабочая позиция Psh переключения режимов трансмиссии оборудования 46 для выполнения операций переключения режимов трансмиссии становится неопределенной, водитель уведомляется в отношении того, что управление движением в аварийном режиме может выполняться, через дисплей на приборной панели 77. Следовательно, даже в случае возникновения анормальности при обнаружении, водитель может распознавать, что управление движением в аварийном режиме может выполняться.
[0107] При использовании варианта осуществления, в случае если устройство 72 определения анормальностей определяет возникновение такой анормальности при обнаружении, что рабочая позиция Psh переключения режимов трансмиссии оборудования 46 для выполнения операций переключения режимов трансмиссии становится неопределенной, и если автоматическое вождение выполняется, автоматическое вождение непрерывно выполняется. Следовательно, можно продолжать движение транспортного средства 10 посредством автоматического вождения.
[0108] При использовании варианта осуществления, в случае если устройство 72 определения анормальностей определяет возникновение такой анормальности при обнаружении, что рабочая позиция Psh переключения режимов трансмиссии оборудования 46 для выполнения операций переключения режимов трансмиссии становится неопределенной, и если устройство 82 определения состояния остановки определяет то, что транспортное средство 10 находится в состоянии остановки, ввод пункта назначения разрешается, и в силу этого ввод пункта назначения выполняется во время остановки транспортного средства таким образом, что ввод пункта назначения может выполняться в безопасном состоянии.
[0109] При использовании варианта осуществления, когда переключение на автоматическое вождение выполняется водителем, выполняется автоматическое вождение. Следовательно, водитель может выбирать то, следует или нет выполнять автоматическое вождение.
[0110] При использовании варианта осуществления, в случае если определяется то, что рабочая позиция Psh переключения режимов трансмиссии является неопределенной, и если пункт назначения введен в навигационное оборудование 75, транспортное средство 10 движется в пункт назначения. Следовательно, транспортное средство 10 может двигаться в пункт назначения без остановки.
[0111] Далее описывается альтернативный вариант осуществления изобретения. В нижеприведенном описании, части, общие с вышеописанным вариантом осуществления обозначаются посредством идентичных ссылок с номерами, и описания для частей опускаются.
[0112] Устройство 100 управления движением в аварийном режиме (см. круглую скобку на фиг. 2), составляющее электронное устройство управления 98 (см. круглую скобку на фиг. 2) в варианте осуществления, функционально включает в себя устройство 102 определения позиции движения (см. круглую скобку на фиг. 2), чтобы определять то, представляет собой дорога, по которой в данный момент движется транспортное средство 10, автостраду или нет, в случае, если устройство 72 определения анормальностей определяет возникновение такой анормальности при обнаружении, что рабочая позиция Psh переключения режимов трансмиссии становится неопределенной, и если пункт назначения не введен в навигационное оборудование 75.
[0113] Устройство 102 определения позиции движения определяет то, представляет или нет дорога, по которой в данный момент движется транспортное средство 10, собой автостраду. Устройство 102 определения позиции движения определяет то, представляет или нет дорога, по которой движется транспортное средство 10, собой автостраду, на основе текущей позиции транспортного средства 10 и информации дороги, сохраненной в навигационном оборудовании 75 заранее. В случае если устройство 102 определения позиции движения определяет то, что дорога, по которой движется транспортное средство 10, представляет собой общую дорогу, устройство 100 управления движением в аварийном режиме выполняет управление, идентичное управлению вышеописанного варианта осуществления. Таким образом, устройство 100 управления движением в аварийном режиме, после временной остановки транспортного средства 10, извлекает место временной стоянки для эвакуации аналогично вышеописанному варианту осуществления, и отображает экран для выбора места временной стоянки для эвакуации на мониторе 75a навигационного оборудования 75, и водитель выбирает место временной стоянки для эвакуации. После того, как водитель выбирает место временной стоянки для эвакуации, устройство 100 управления движением в аварийном режиме задает выбранное место временной стоянки для эвакуации в качестве пункта назначения и выводит команду для того, чтобы выполнять автоматическое вождение и автоматическую парковку транспортного средства 10, в устройство 68 управления автоматическим вождением.
[0114] В случае если устройство 102 определения позиции движения определяет то, что дорога, по которой движется транспортное средство 10, представляет собой автостраду, устройство 84 извлечения мест временной стоянки для эвакуации, в ходе движения, извлекает предварительно определенное место временной стоянки для эвакуации, заданное на автостраде, в качестве временного пункта назначения, и в ходе движения, устройство 74 управления отображением отображает экран для выбора места временной стоянки для эвакуации на мониторе 75a. Устройство 86 определения выбора временной стоянки для эвакуации определяет то, выбрано или нет место временной стоянки для эвакуации в ходе движения. Когда место временной стоянки для эвакуации выбрано водителем, устройство 100 управления движением в аварийном режиме выводит, в устройство 68 управления автоматическим вождением, команду для того, чтобы инструктировать транспортному средству 10 автоматически осуществлять вождение к месту временной стоянки для эвакуации, заданному без остановки транспортного средства 10. Следовательно, транспортное средство 10 движется в аварийном режиме движения к месту временной стоянки для эвакуации. Например, зона обслуживания, ближайшая к текущей позиции, извлекается в качестве места временной стоянки для эвакуации, когда транспортное средство 10 движется на автостраде. В случае если водитель не выбирает место временной стоянки для эвакуации, устройство 100 управления движением в аварийном режиме выполняет движение в режиме "ехать за", при котором транспортное средство 10 едет за транспортным средством, движущимся впереди транспортного средства 10.
[0115] В вышеприведенном примере, когда место временной стоянки для эвакуации, такое как зона обслуживания извлекается, водитель выбирает то, движется или нет транспортное средство 10 в место временной стоянки для эвакуации, и после этого транспортное средство 10 движется в место временной стоянки для эвакуации. Тем не менее, когда место временной стоянки для эвакуации извлекается, транспортное средство 10 может двигаться в место временной стоянки для эвакуации автоматически без выбора водителя.
[0116] Фиг. 6 является блок-схемой последовательности операций способа, соответствующей альтернативному варианту осуществления изобретения, и соответствует фиг. 5 в вышеописанном варианте осуществления. Таким образом, фиг. 6 показывает альтернативный способ операции управления (соответствующей S46 на фиг. 4), когда операция переключения на автоматическое вождение выполняется в ходе движения в случае возникновения анормальности при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии оборудования 46 для выполнения операций переключения режимов трансмиссии становится неопределенной. Блок-схема последовательности операций способа по фиг. 6 отличается от блок-схемы последовательности операций способа по фиг. 5 в вышеописанном варианте осуществления, в операциях управления на этапе S70 и далее (на этапе S70-S75), которые выполняются в случае, если пункт назначения не введен на этапе S50. Ниже описываются операции управления на этапе S70 и далее.
[0117] В случае если устройство 80 определения ввода пунктов назначения определяет то, что пункт назначения не введен, на этапе S50 по фиг. 6, отрицательное определение выполняется на этапе S50, и процедура переходит к этапу S70. Устройство 102 определения позиции движения определяет то, представляет или нет дорога, по которой в данный момент движется транспортное средство 10, собой автостраду, на этапе S70, соответствующем функции управления устройством 102 определения позиции движения. В случае если дорога, по которой движется транспортное средство 10, представляет собой общую дорогу, отрицательное определение выполняется на этапе S70, и устройство 100 управления движением в аварийном режиме временно останавливает транспортное средство 10 на обочине дороги и т.п. на этапе S71, соответствующем функции управления устройством 100 управления движением в аварийном режиме.
[0118] В случае если дорога представляет собой общую дорогу в то время, когда транспортное средство 10 находится в состоянии остановки, устройство 84 извлечения мест временной стоянки для эвакуации извлекает место временной стоянки для эвакуации на этапе S72, соответствующем функции управления устройством 84 извлечения мест временной стоянки для эвакуации, и устройство 74 управления отображением отображает экран для выбора места временной стоянки для эвакуации, на мониторе 75a навигационного оборудования 75, на этапе S73, соответствующем функции управления устройством 74 управления отображением. Затем устройство 86 определения выбора временной стоянки для эвакуации определяет то, выбрано или нет место временной стоянки для эвакуации, на этапе S74, соответствующем функции управления устройством 86 определения выбора временной стоянки для эвакуации. В случае если место временной стоянки для эвакуации выбрано, операции управления на этапе S51-S55 выполняются, и автоматическое вождение транспортного средства 10 в место временной стоянки для эвакуации выполняется.
[0119] В случае если дорога, по которой движется транспортное средство 10, представляет собой автостраду на этапе S70, устройство 84 извлечения мест временной стоянки для эвакуации извлекает место временной стоянки для эвакуации в ходе движения на этапе S76, соответствующем операции управления устройства 84 извлечения мест временной стоянки для эвакуации, и устройство 74 управления отображением, на этапе S73, отображает экран для выбора места временной стоянки для эвакуации на мониторе 75a. Дополнительно, выбор места временной стоянки для эвакуации разрешается даже в ходе движения. Когда место временной стоянки для эвакуации выбирается водителем, положительное определение выполняется на этапе S74, и процедура переходит к этапу S51, так что автоматическое вождение транспортного средства 10 в место временной стоянки для эвакуации выполняется. С другой стороны, в случае если место временной стоянки для эвакуации не выбирается на этапе S74, отрицательное определение выполняется на этапе S74, и устройство 100 управления движением в аварийном режиме выполняет движение в режиме "ехать за", при котором транспортное средство 10 едет за транспортным средством, движущимся впереди транспортного средства 10, на этапе S75. Соответственно, даже в случае, если место временной стоянки для эвакуации не выбирается, движение продолжается.
[0120] После того, как место временной стоянки для эвакуации (зона обслуживания и т.п.) извлекается на этапе S76, автоматическое вождение транспортного средства 10 в извлеченное место временной стоянки для эвакуации может выполняться автоматически, в то время как водитель не выбирает место временной стоянки для эвакуации. Таким образом, S73 и S74 могут опускаться.
[0121] Когда транспортное средство 10 останавливается на обочине дороги и т.п. в ходе движения на автостраде, имеется высокая вероятность столкновения сзади с едущим сзади транспортным средством. Следовательно, в ходе движения на автостраде, транспортное средство 10 не останавливается и движется в место временной стоянки для эвакуации. В силу этого, можно предотвращать столкновение сзади с едущим сзади транспортным средством.
[0122] Как описано выше, при использовании варианта осуществления, можно получать преимущество, идентичное преимуществу вышеописанного варианта осуществления. В варианте осуществления, в случае если устройство 120 определения анормальностей определяет то, что анормальность при обнаружении возникает в ходе движения на автостраде, транспортное средство 10 движется к месту временной стоянки для эвакуации, такому как зона обслуживания, заданная на автостраде. Следовательно, транспортное средство 10 может непрерывно двигаться в безопасное место без остановки в середине автострады.
[0123] В вышеописанных вариантах осуществления, устройство 72 определения анормальностей определяет то, является или нет неопределенной рабочая позиция Psh переключения режимов трансмиссии, на основе анормальности IC 49 Холла оборудования 46 для выполнения операций переключения режимов трансмиссии. В качестве другой причины, по которой рабочая позиция Psh переключения режимов трансмиссии становится неопределенной, может возникать неисправность ECU 56 переключения режимов трансмиссии по проводам. В этом случае также, посредством анормальности при обнаружении, рабочая позиция Psh переключения режимов трансмиссии, переключаемая посредством оборудования 46 для выполнения операций переключения режимов трансмиссии, не может обнаруживаться. Следовательно, устройство 120 определения анормальностей (см. круглую скобку на фиг. 2), функционально включенное в электронное оборудование 124 управления в варианте осуществления, определяет то, возникает или нет анормальность при обнаружении рабочей позиции Psh переключения режимов трансмиссии, которая переключается посредством оборудования 46 для выполнения операций переключения режимов трансмиссии, на основе того, возникает или нет анормальность в ECU 56 переключения режимов трансмиссии по проводам. ECU 56 переключения режимов трансмиссии по проводам и актуатор 28 представляют собой примеры модуля управления переключением режимов трансмиссии в изобретении.
[0124] Устройство 120 определения анормальностей определяет анормальность ECU 56 переключения режимов трансмиссии по проводам. Устройство 120 определения анормальностей определяет то, что анормальность ECU 56 переключения режимов трансмиссии по проводам возникает, например, в случае если анормальность обнаруживается на основе схемы обнаружения анормальностей (схемы самопроверки), функционально включенной в ECU 56 переключения режимов трансмиссии по проводам. Дополнительно, устройство 120 определения анормальностей определяет то, что анормальность ECU 56 переключения режимов трансмиссии по проводам возникает, в случае если ECU 56 переключения режимов трансмиссии по проводам не выводит сигнал Sshift переключения режимов трансмиссии в HV-ECU 54 при операции переключения режимов трансмиссии оборудования 46 для выполнения операций переключения режимов трансмиссии. В случае возникновения анормальности ECU 56 переключения режимов трансмиссии по проводам, затруднительно приводить в действие механизм 29 блокировки при парковке через актуатор 28 и переключать диапазон движения транспортного средства 10 на диапазон парковки. Кроме того, возможен случай, когда определяется, что анормальность ECU 56 переключения режимов трансмиссии по проводам возникла из-за анормальности актуатора 28. Таким образом, когда возникла анормальность ECU 56 переключения режимов трансмиссии по проводам, затруднительно фиксировать транспортное средство 10 таким образом, что транспортное средство 10 не может быть перемещено после остановки транспортного средства 10.
[0125] В случае если устройство 120 определения анормальностей определяет то, что анормальность ECU 56 переключения режимов трансмиссии по проводам возникает, устройство 122 управления движением в аварийном режиме (см. круглую скобку на фиг. 2) в варианте осуществления инструктирует транспортному средству 10 двигаться в пункт назначения посредством автоматического вождения и инструктирует транспортного средства 10 парковаться в предварительно определенном парковочном месте, аналогично вышеописанному варианту осуществления. В этой связи, даже в случае, если ECU 56 переключения режимов трансмиссии по проводам является неисправным, транспортное средство 10 может двигаться на основе сигнала Sdrive команды управления мощностью приведения в движение из ECU 64 автоматического вождения.
[0126] Во время парковки транспортного средства 10, устройство 122 управления движением в аварийном режиме приводит в действие электрический парковочный тормоз 47, вместо механизма 29 блокировки при парковке. В случае анормальности ECU 56 переключения режимов трансмиссии по проводам имеется вероятность того, что сигнал для приведения в действие механизма 29 блокировки при парковке не выводится из ECU 56 переключения режимов трансмиссии по проводам, и механизм 29 блокировки при парковке нормально не приводится в действие. В ответ, в случае если устройство 120 определения анормальностей определяет то, что анормальность ECU 56 переключения режимов трансмиссии по проводам возникает, устройство 122 управления движением в аварийном режиме приводит в действие электрический парковочный тормоз 47 во время парковки транспортного средства 10. Таким образом, в случае если анормальность ECU 56 переключения режимов трансмиссии по проводам возникает, фиксация транспортного средства 10 после остановки выполняется посредством электрического парковочного тормоза 47, и в силу этого можно запрещать перемещение транспортного средства 10 после парковки. Электрический парковочный тормоз 47 приводится в действие посредством сигнала, который выводится из ECU 60 тормоза, и в силу этого можно приводить в действие электрический парковочный тормоз 47, даже когда анормальность возникает в ECU 56 переключения режимов трансмиссии по проводам.
[0127] Когда транспортное средство 10 паркуется на дороге, имеющей градиент, который превышает допустимый градиент электрического парковочного тормоза 47, имеется вероятность того, что транспортное средство 10 перемещается против тормозной мощности электрического парковочного тормоза 47. Следовательно, устройство 122 управления движением в аварийном режиме надежно предотвращает перемещение транспортного средства 10 после парковки, посредством выбора места, имеющего небольшой градиент в качестве места для парковки.
[0128] Фиг. 7 является блок-схемой последовательности операций способа для описания операции управления электронного оборудования 124 управления в случае, если анормальность при обнаружении рабочей позиции Psh переключения режимов трансмиссии возникает вследствие анормальности ECU 56 переключения режимов трансмиссии по проводам. Фиг. 7 соответствует фиг. 4 в вышеописанном варианте осуществления. Функции управления, идентичные функциям управления на блок-схеме последовательности операций способа по фиг. 4, обозначаются посредством идентичных номеров этапа, и подробные описания для функций управления опускаются.
[0129] На фиг. 7, устройство 120 определения анормальностей определяет то, возникает или нет анормальность в ECU 56 переключения режимов трансмиссии по проводам, на этапе S80, соответствующем функции управления устройством 120 определения анормальностей. В случае если устройство 120 определения анормальностей определяет то, что анормальность ECU 56 переключения режимов трансмиссии по проводам не возникает, процедура возвращается к этапу S80, и устройство 120 определения анормальностей непрерывно определяет то, возникает или нет анормальность ECU 56 переключения режимов трансмиссии по проводам. В случае если устройство 120 определения анормальностей определяет то, что анормальность ECU 56 переключения режимов трансмиссии по проводам возникает, положительное определение выполняется на этапе S80, и устройство 74 управления отображением отображает уведомление относительно возникновения анормальности ECU 56 переключения режимов трансмиссии по проводам, на приборной панели 77, на этапе S31, соответствующем функции управления устройством 74 управления отображением. В силу этого, водитель может распознавать анормальность ECU 56 переключения режимов трансмиссии по проводам.
[0130] Устройство 76 определения автоматического вождения определяет то, выполняется или нет автоматическое вождение, на этапе S33, соответствующем функции управления устройством 76 определения автоматического вождения. В случае если автоматическое вождение выполняется, S34 и S35 выполняются, так что автоматическое вождение непрерывно выполняется. В случае если вождение вручную выполняется, отрицательное определение выполняется на этапе S33. На этапе S36, устройство 74 управления отображением отображает уведомление (дисплей для навигации на основе инструкций при автоматическом вождении) в отношении того, что переключение с вождения вручную на автоматическое вождение необходимо, на приборной панели 77, и на этапе S37, устройство 78 определения переключения определяет то, выполнена или нет операция переключения на автоматическое вождение водителем.
[0131] В случае если операция переключения на автоматическое вождение не выполнена, отрицательное определение выполняется на этапе S37, и операции управления на этапе S38-S45 выполняются. На этапе S38-S45, операции управления, идентичные операциям управления в вышеописанном варианте осуществления, выполняются, и в силу этого описания для операций управления опускаются. В случае если положительное определение выполняется на этапе S37, автоматическое вождение транспортного средства 10 в пункт назначения и автоматическая парковка транспортного средства 10 в предварительно определенном парковочном месте выполняются на этапе S46. Затем, устройство 122 управления движением в аварийном режиме определяет то, остановлено или нет транспортное средство 10 в предварительно определенном парковочном месте, на этапе S81, соответствующем функции управления устройством 122 управления движением в аварийном режиме. В случае если транспортное средство 10 остановлено в парковочном месте, положительное определение выполняется на этапе S81, и устройство 122 управления движением в аварийном режиме приводит в действие электрический парковочный тормоз 47 на этапе S82, соответствующем функции управления устройством 122 управления движением в аварийном режиме. В силу этого, даже когда механизм 29 блокировки при парковке не приводится в действие вследствие анормальности ECU 56 переключения режимов трансмиссии по проводам, электрический парковочный тормоз 47 приводится в действие таким образом, что состояние остановки транспортного средства 10 после парковки поддерживается.
[0132] Как описано выше, при использовании варианта осуществления, можно получать преимущество, идентичное преимуществу вышеописанного варианта осуществления. В варианте осуществления, в случае если устройство 120 определения анормальностей определяет то, что анормальность ECU 56 переключения режимов трансмиссии по проводам возникает, операция парковки выполняется посредством электрического парковочного тормоза 47. Следовательно, даже когда механизм 29 блокировки при парковке не приводится в действие вследствие неисправности ECU 56 переключения режимов трансмиссии по проводам, можно предотвращать перемещение транспортного средства 10 после парковки.
[0133] Таким образом, варианты осуществления изобретения описываются подробно на основе чертежей. Изобретение может применяться к другим режимам.
[0134] Например, вышеописанные варианты осуществления не всегда должны обязательно реализовываться независимо и могут комбинироваться в надлежащих случаях. Например, могут определяться как анормальность IC 49 Холла, так и анормальность ECU 56 переключения режимов трансмиссии по проводам.
[0135] В вышеописанных вариантах осуществления, управление автоматическим вождением представляет собой управление для выполнения полностью автоматического вождения, при котором угол поворота руля при рулении 30, мощность приведения в движение и тормозная мощность управляются. Тем не менее, изобретение не всегда ограничивается полностью автоматическим вождением, и автоматическое вождение может выполняться для некоторых функций, таких как усиления руля 30, педали акселератора и педали тормоза.
[0136] В вышеописанных вариантах осуществления, после того, как транспортное средство 10 прибывает в пункт назначения в аварийном режиме движения, управление автоматической парковкой выполняется. Тем не менее, управление автоматической парковкой не всегда должно обязательно выполняться.
[0137] В вышеописанных вариантах осуществления, в случае если пункт назначения не вводится, транспортное средство 10 временно останавливается, место временной стоянки для эвакуации извлекается, и автоматическое вождение транспортного средства 10 в извлеченное место временной стоянки для эвакуации выполняется. Тем не менее, пункт назначения может непосредственно вводиться, когда транспортное средство 10 останавливается. Дополнительно, место временной стоянки для эвакуации может выбираться из дома водителя, дилера, ремонтной мастерской и т.п.
[0138] В вышеописанных вариантах осуществления, электронное оборудование 52 управления выполнено с возможностью включать в себя HV-ECU 54, ECU 56 переключения режимов трансмиссии по проводам, ECU 58 рулевого управления, ECU 60 тормоза и ECU 64 автоматического вождения. Тем не менее, эти ECU не всегда должны обязательно предоставляться отдельно, и модификации могут вноситься в надлежащих случаях. Например, HV-ECU 54 и ECU 56 переключения режимов трансмиссии по проводам могут быть сконфигурированы как один ECU. Дополнительно, все ECU могут быть сконфигурированы как один ECU.
[0139] В вышеописанных вариантах осуществления, в случае если анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии становится неопределенной в то время, когда транспортное средство 10 движется, транспортное средство 10 останавливается на обочине дороги и т.п., и затем место временной стоянки для эвакуации выбирается. Тем не менее, транспортное средство 10 не всегда должно обязательно останавливаться на обочине дороги. Например, место временной стоянки для эвакуации может выбираться, когда транспортное средство 10 останавливается на светофоре.
[0140] В вышеописанных вариантах осуществления, определяется то, что анормальность при обнаружении, в силу которой рабочая позиция Psh переключения режимов трансмиссии становится неопределенной, возникает, в случае если две IC 49 Холла являются неисправными. Тем не менее, может определяться то, что рабочая позиция Psh переключения режимов трансмиссии является неопределенной, в случае если одна из IC 49 Холла является неисправной. Когда одна из IC 49 Холла является неисправной, управление движением в аварийном режиме быстро выполняется посредством устройства 70 управления движением в аварийном режиме, так что обеспечивается высокая безопасность.
[0141] В вышеописанных вариантах осуществления, транспортное средство 10 представляет собой гибридное транспортное средство, выполненное с возможностью включать в себя двигатель 12 и устройство 14 трансмиссии с переключаемыми режимами. Тем не менее, изобретение не всегда ограничивается гибридным транспортным средством. Например, транспортное средство 10 может представлять собой электротранспортное средство, которое использует электромотор в качестве источника приведения в движение, и устройство 14 трансмиссии с переключаемыми режимами не всегда должно обязательно предоставляться. Другими словами, изобретение может надлежащим образом применяться к любому транспортному средству, которое может двигаться независимо от операции оборудования 46 для выполнения операций переключения режимов трансмиссии водителем.
[0142] В вышеописанных вариантах осуществления, когда возникновение анормальности при обнаружении оборудования 46 для выполнения операций переключения режимов трансмиссии определяется, транспортное средство 10 движется в пункт назначения в качестве управления движением в аварийном режиме. Тем не менее, когда возникновение анормальности при обнаружении оборудования 46 для выполнения операций переключения режимов трансмиссии определяется, движение в режиме "ехать за", при котором транспортное средство 10 движется в то время при следовании за транспортным средством, которое движется впереди транспортного средства 10, может выполняться в качестве управления движением в аварийном режиме.
[0143] Вышеописанные варианты осуществления являются просто примерами, и изобретение может выполняться при том, что различные изменения и модификации вносятся на основе сведений специалистов в данной области техники.
Реферат
Изобретение относится к транспортным средствам. Оборудование управления движением транспортного средства в аварийном режиме содержит устройство управления, переключающее диапазон движения на основе рабочей позиции оборудования для выполнения операций переключения режимов трансмиссии. Рабочая позиция обнаруживается оборудованием для обнаружения рабочей позиции. Также имеется устройство определения анормальностей, определяющее возникновение анормальности в оборудовании для обнаружения рабочей позиции. Устройство управления движением в аварийном режиме управляет движением в случае, если устройство определения анормальностей определяет, что анормальность в оборудовании для обнаружения рабочей позиции возникает в ходе движения транспортного средства. Управление движением в аварийном режиме представляет собой управление, посредством которого транспортное средство движется независимо от операции оборудования для выполнения операций переключения режимов трансмиссии. Обеспечивается движение транспортного средства. 11 з.п. ф-лы, 7 ил.
Комментарии