Способ управления парковкой и устройство управления парковкой - RU2735340C1
Код документа: RU2735340C1
Чертежи
Описание
Область техники
[0001] Настоящее изобретение относится к способу управления парковкой и устройству управления парковкой.
Уровень техники
[0002] Известен способ управления парковкой для осуществления управления транспортным средством с выполнением остановки при обнаружении препятствия (патентный документ 1).
Документ уровня техники
Патентный документ
[0003] Патентный документ 1: JP2008–74296A
Сущность изобретения
Проблемы, решаемые изобретением
[0004] В предшествующем уровне техники при обнаружении препятствия транспортным средством управляют так, чтобы оно совершало остановку даже в случае ошибочного обнаружения.
[0005] Задача, решаемая настоящим изобретением, состоит в том, чтобы позволить транспортному средству продолжать движение даже при обнаружении препятствия, при условии, что обнаружение является ошибочным.
Средства решения проблем
[0006] Настоящее изобретение решает вышеупомянутую проблему, возникающую при обнаружении препятствия, посредством уведомления оператора о существовании препятствия и запрашивания ввода утвердительного определения (утверждения, подтверждения, согласия) или отрицательного определения (отрицания, опровержения, несогласия) в отношении существования препятствия и, при получении утвердительного ввода, парковки транспортного средства по парковочному маршруту, рассчитанному при условии наличия препятствия.
Эффект изобретения
[0007] Согласно настоящему изобретению проверяется, является ли результат обнаружения препятствия ошибочным, и, когда результат обнаружения препятствия является ошибочным, процесс парковки может быть выполнен.
Краткое описание чертежей
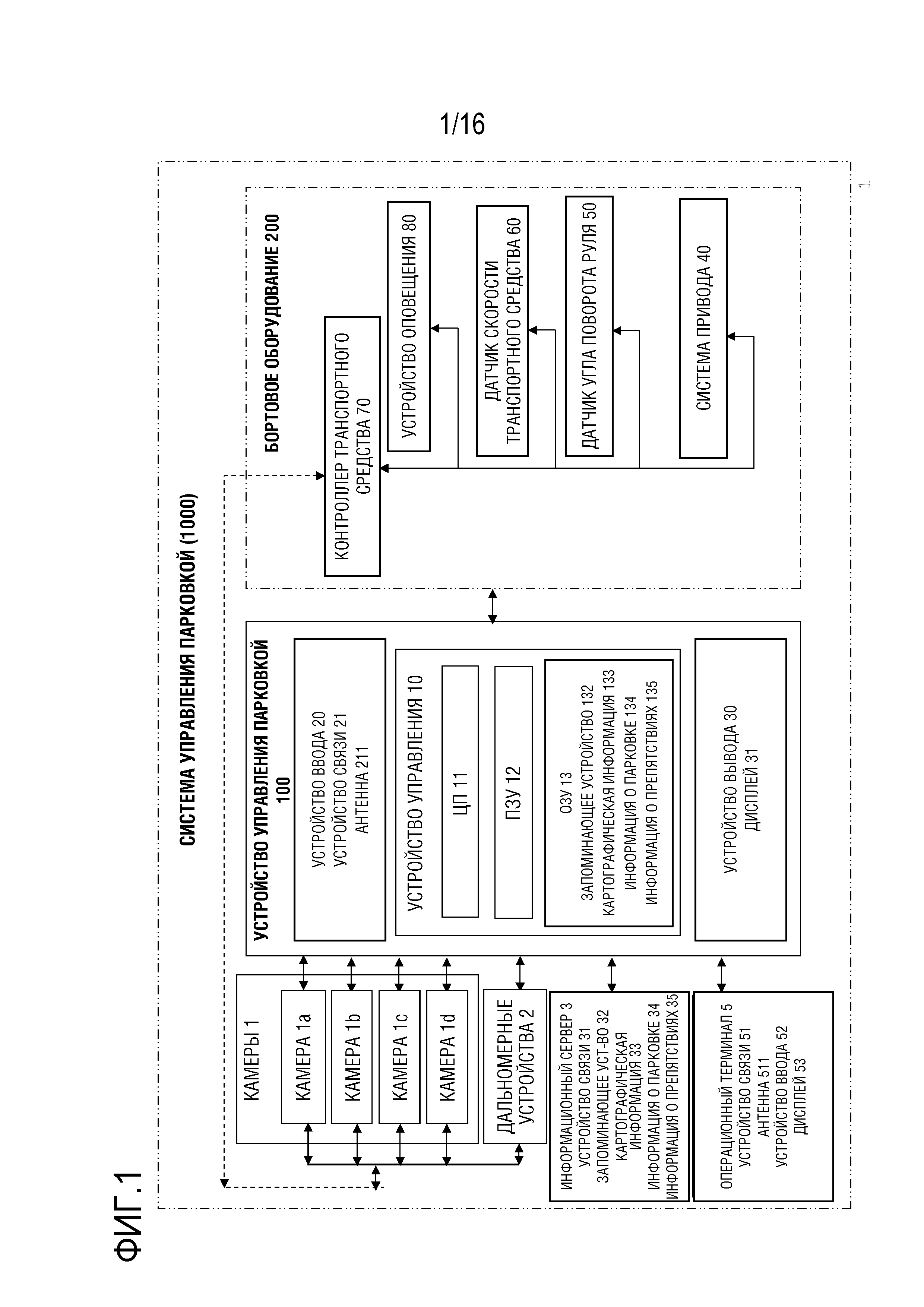
[0008] ФИГ. 1 – блок-схема последовательности операций, иллюстрирующая пример системы управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения.
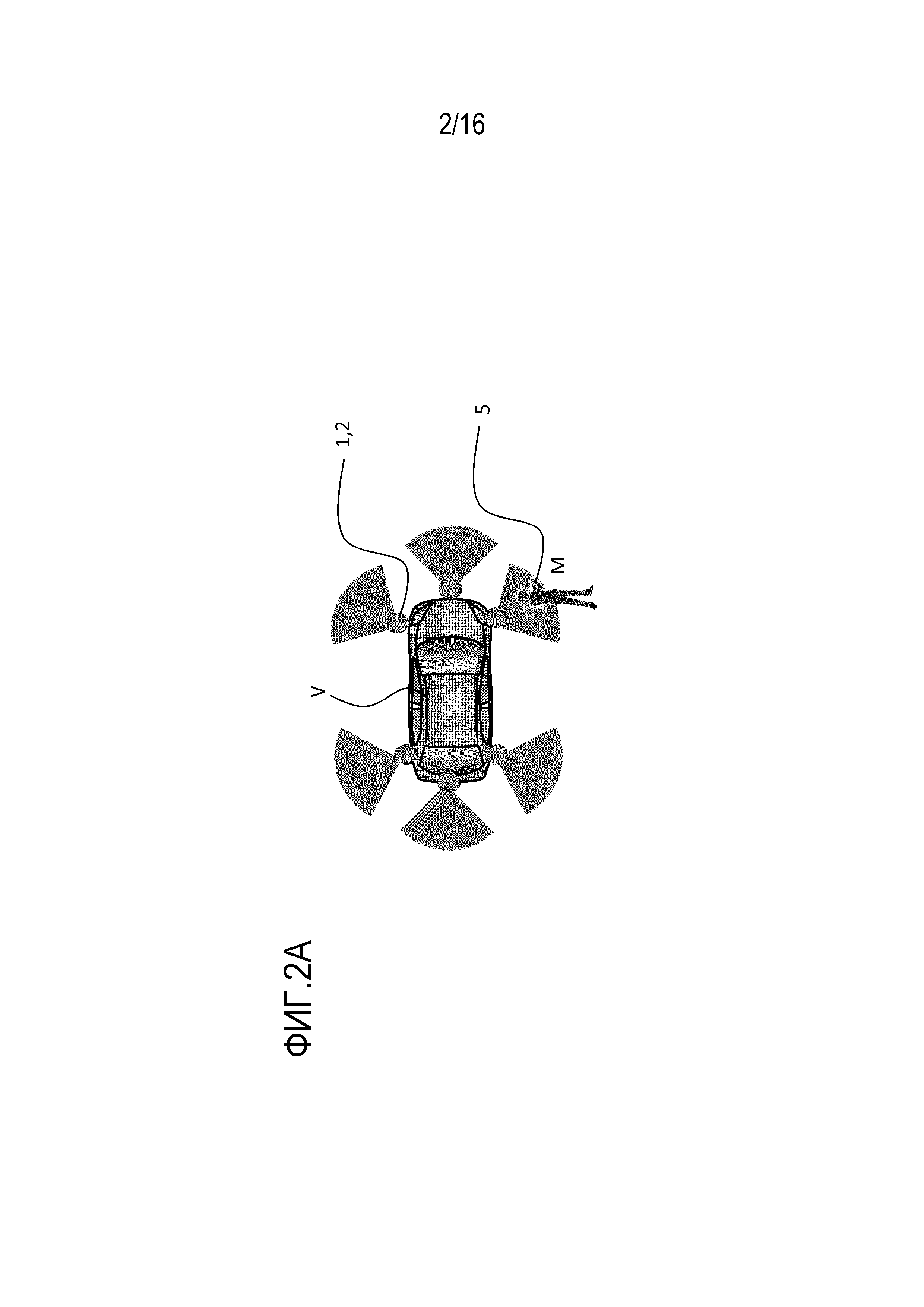
ФИГ. 2А – рисунок для описания первой схемы обнаружения положения оператора.
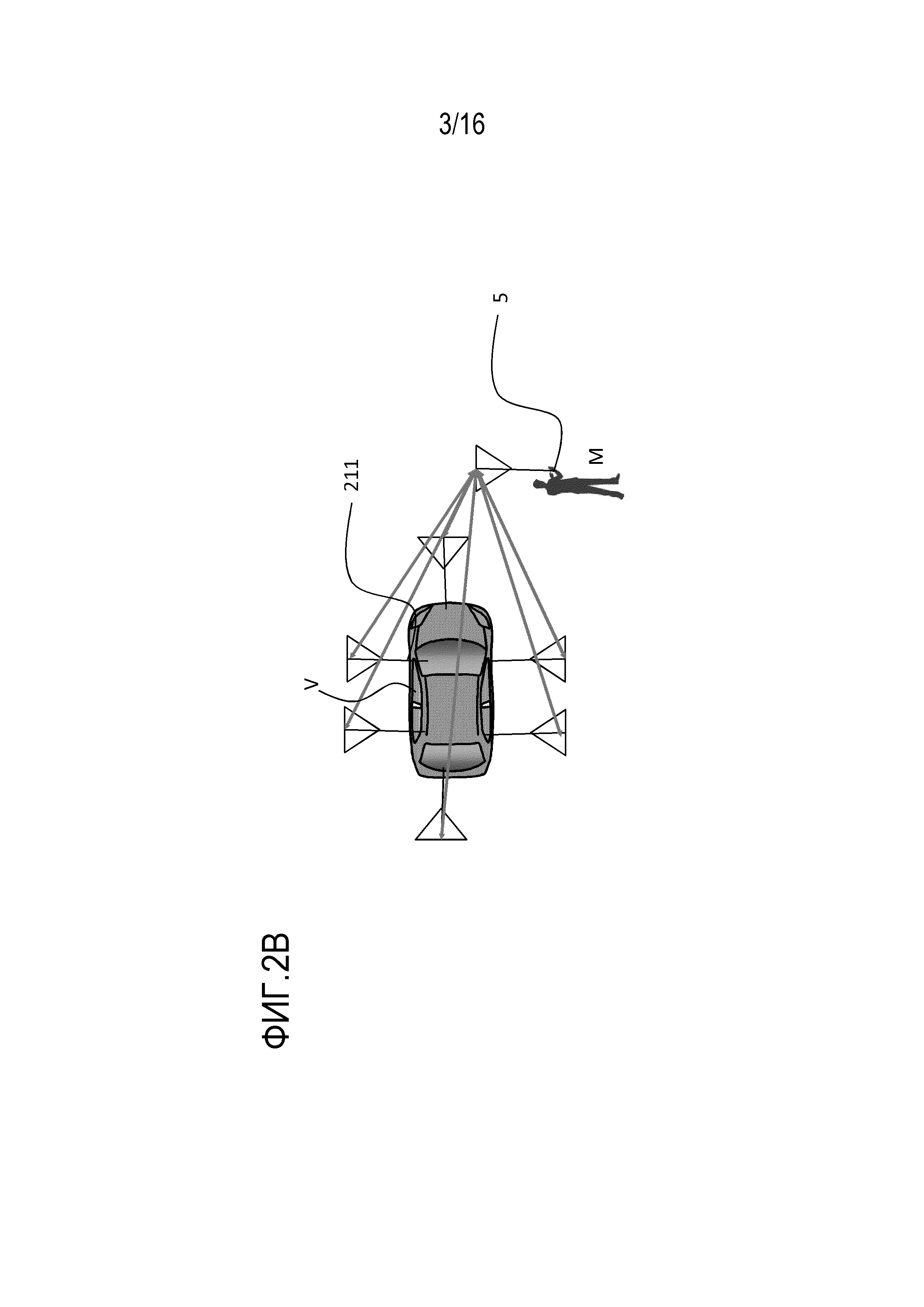
ФИГ. 2B – рисунок для описания второй схемы обнаружения положения оператора.
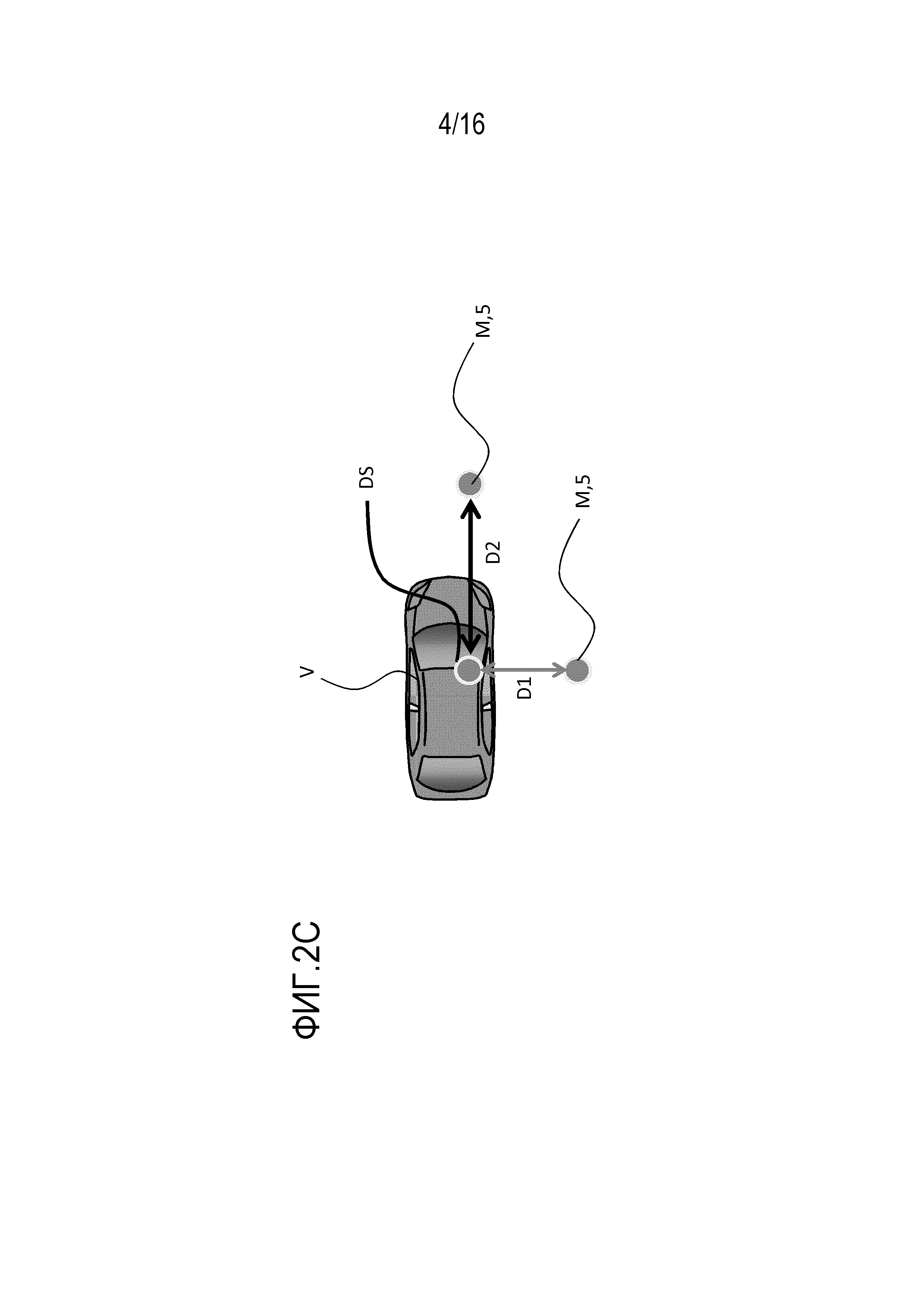
ФИГ. 2C – рисунок для описания третьей схемы обнаружения положения оператора.
ФИГ. 2D – рисунок для описания четвертой схемы обнаружения положения оператора.
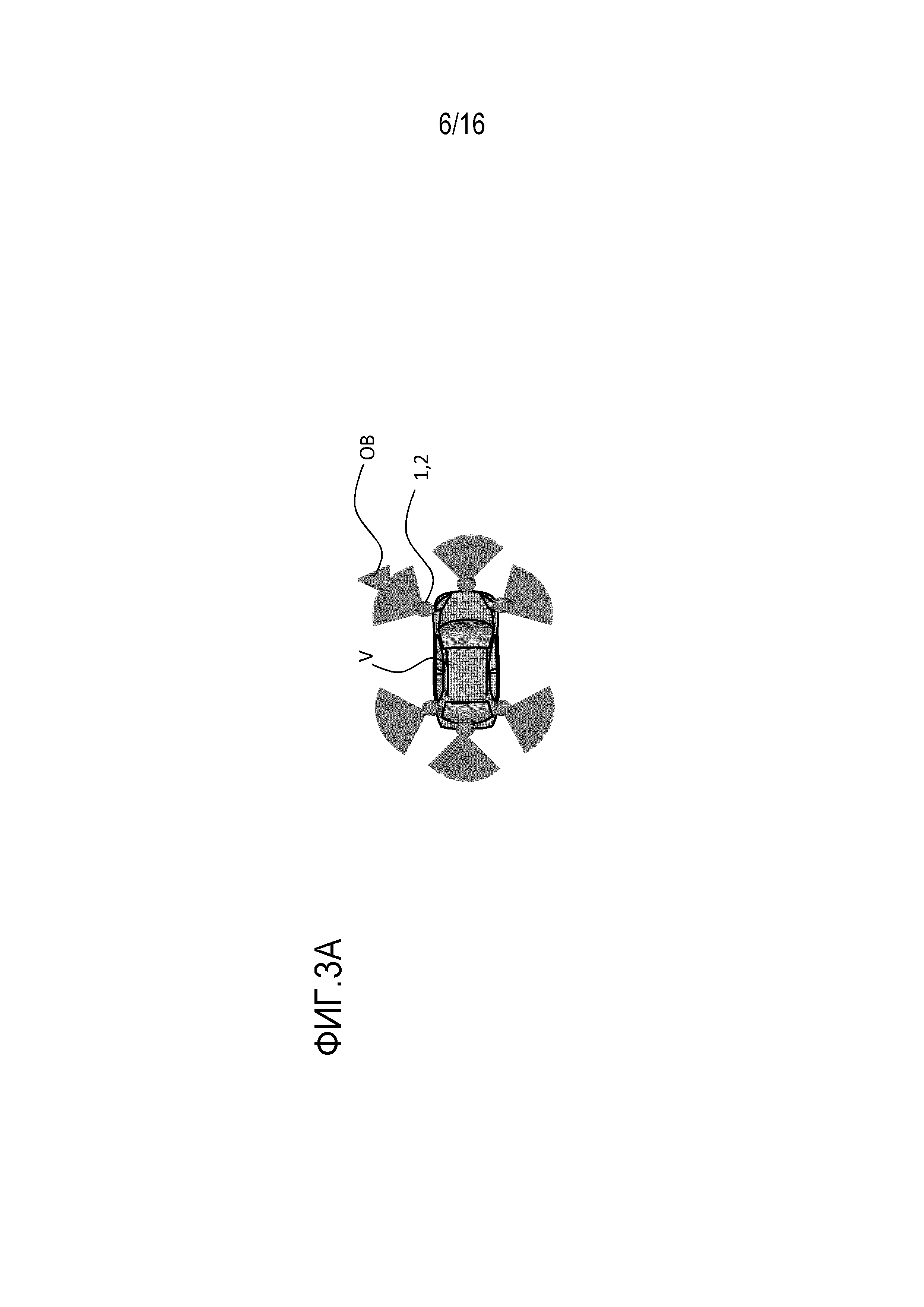
ФИГ. 3А – рисунок для описания первой схемы обнаружения препятствия.
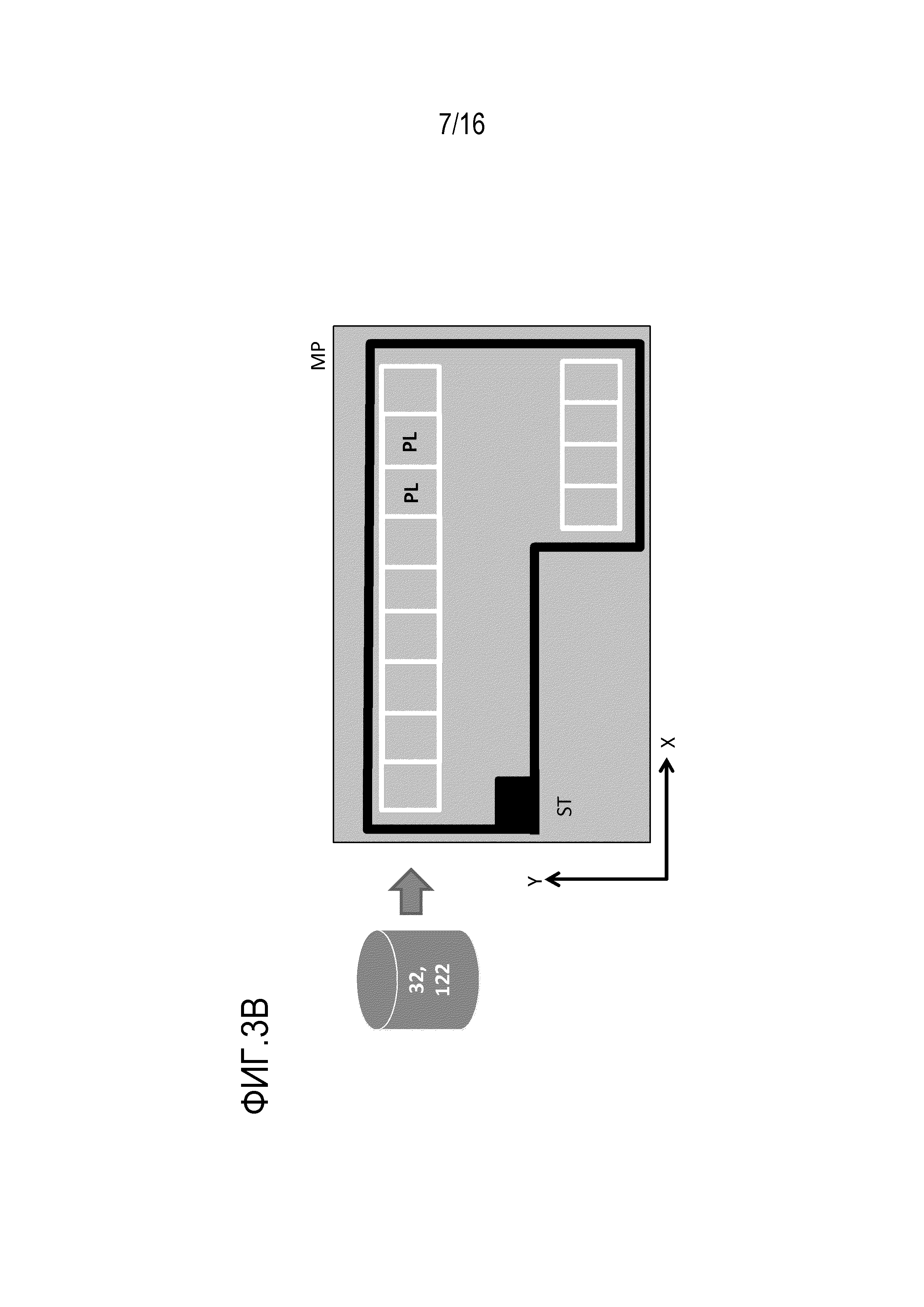
ФИГ. 3B – рисунок для описания второй схемы обнаружения препятствия.
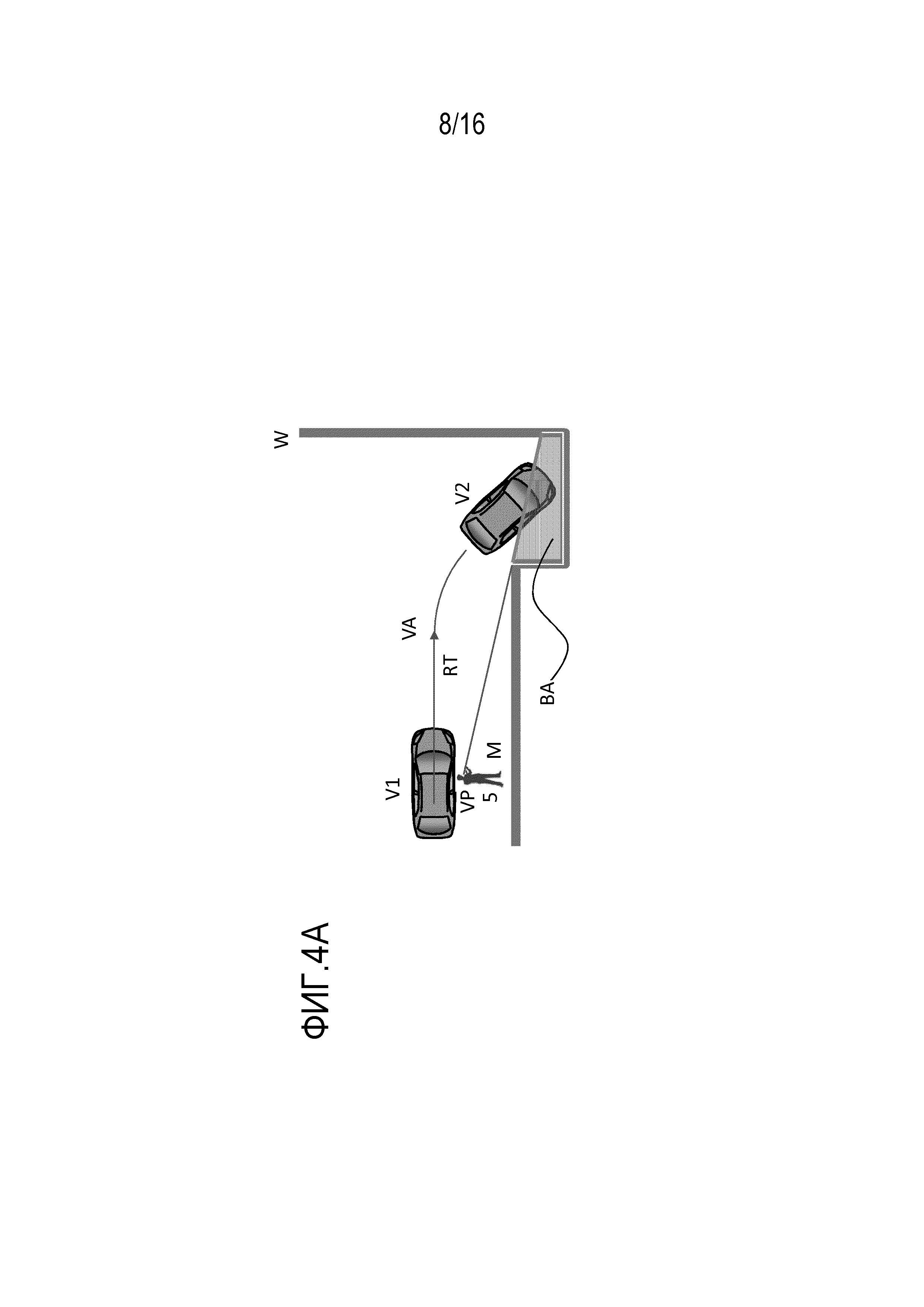
ФИГ. 4А – рисунок для описания первой схемы вычисления первой зоны, которая визуально распознаваема оператором, и второй зоны (слепой зоны).
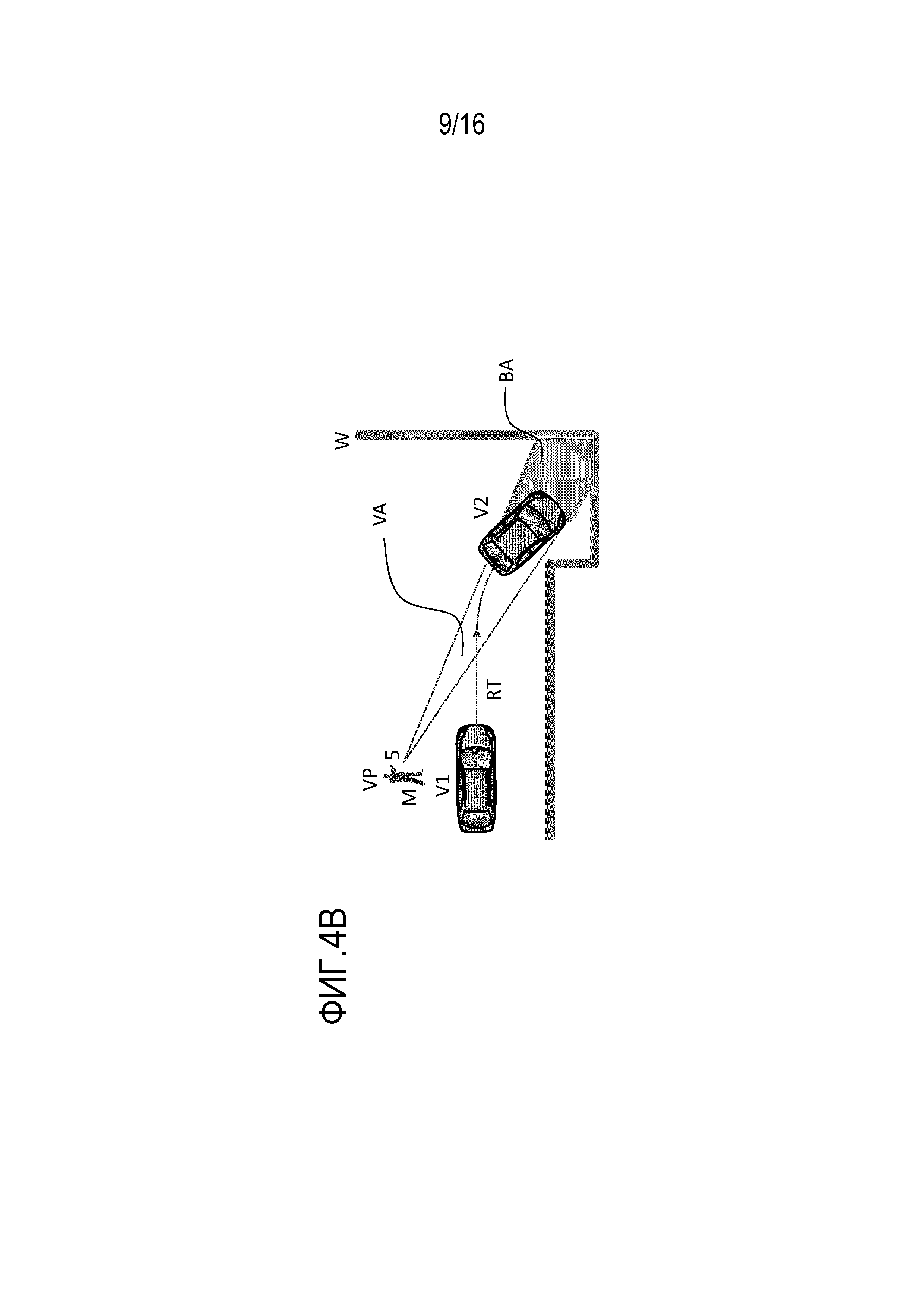
ФИГ. 4B – рисунок для описания второй схемы вычисления первой зоны, которая визуально распознаваема оператором, и второй зоны (слепой зоны).
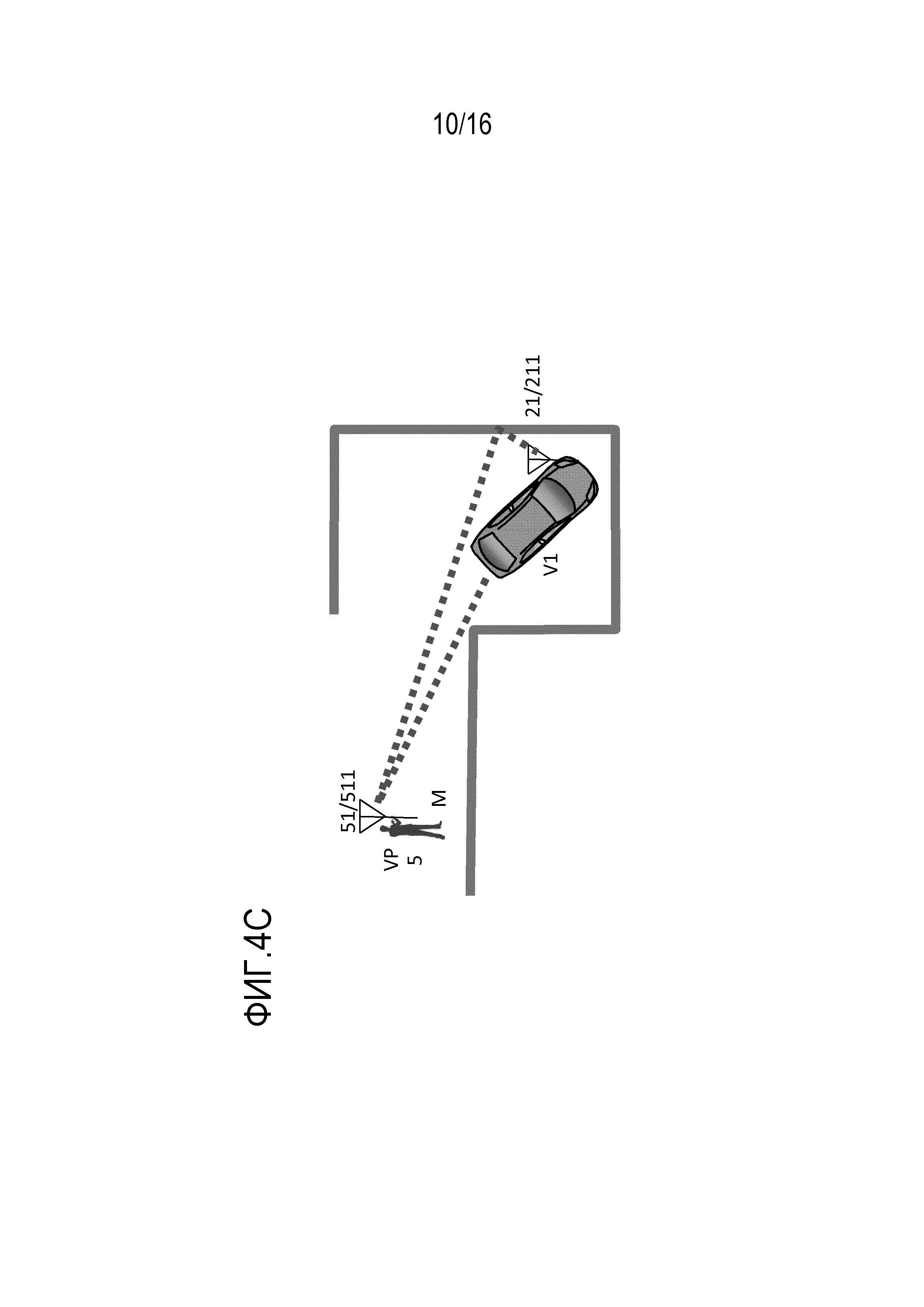
ФИГ. 4C – рисунок для описания третьей схемы вычисления первой зоны, которая визуально распознаваема оператором, и второй зоны (слепой зоны).
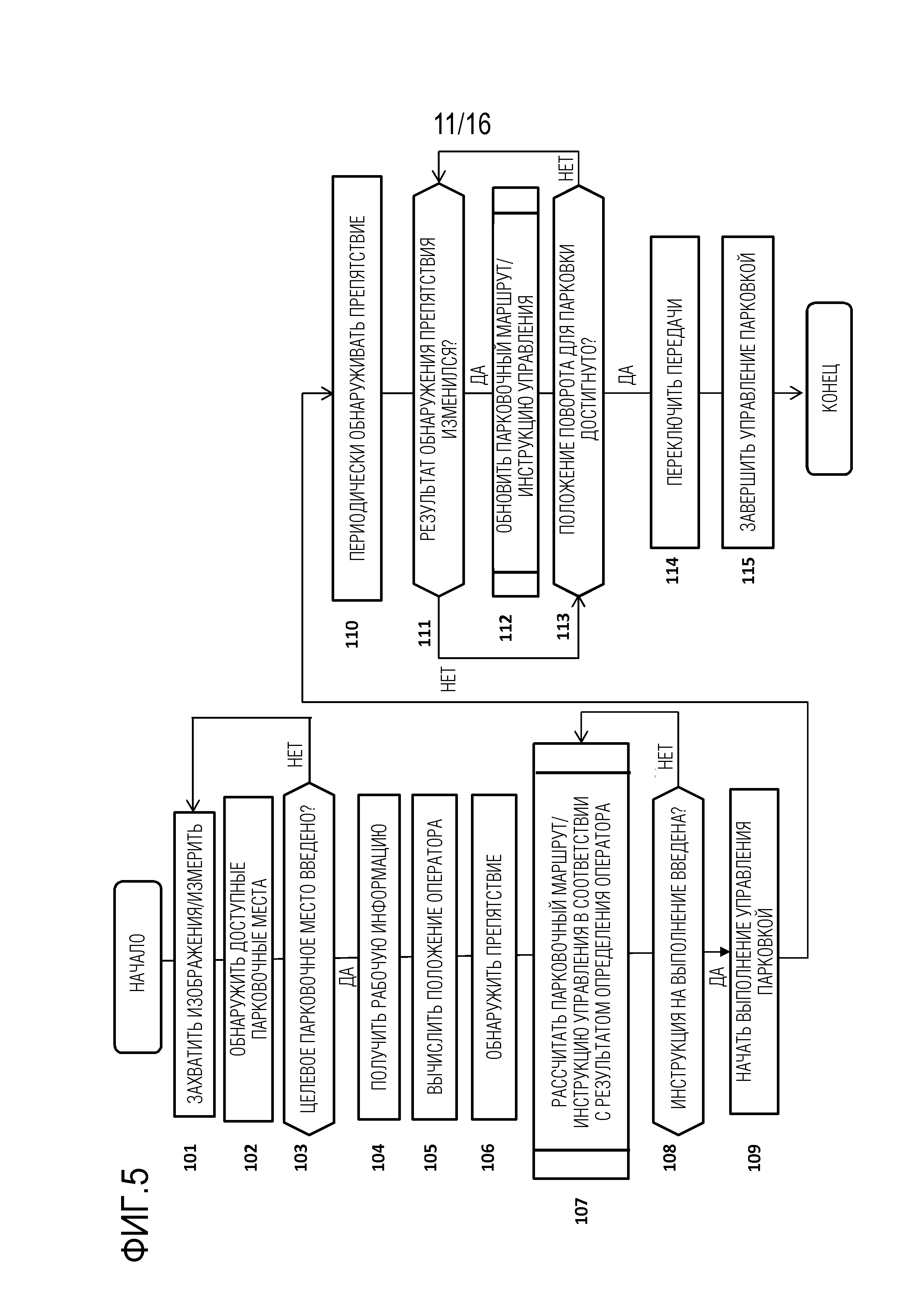
ФИГ. 5 – блок-схема последовательности операций, иллюстрирующая пример процедуры управления, выполняемой системой управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения.
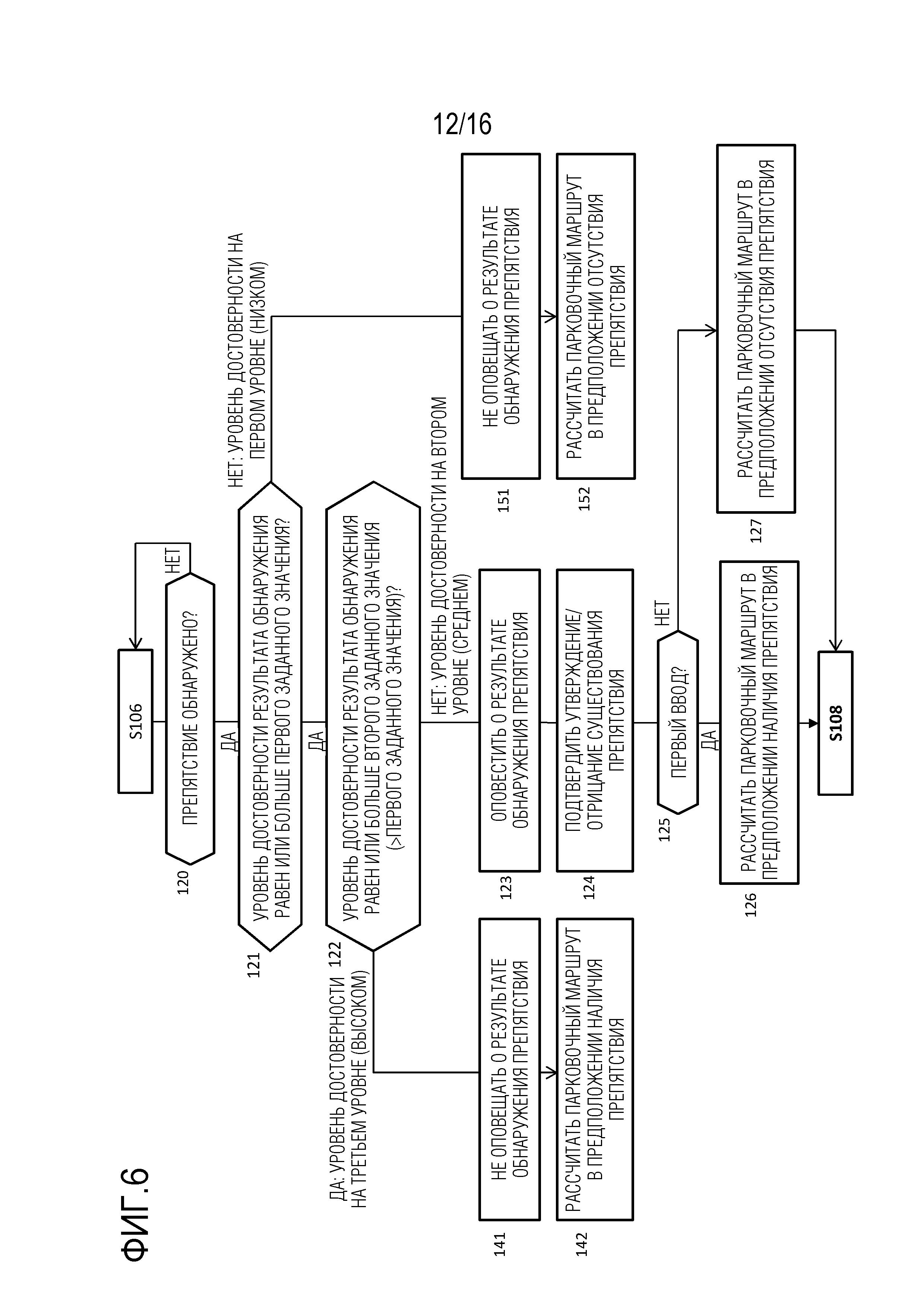
ФИГ. 6 – первая блок–схема последовательности операций, иллюстрирующая пример схемы вычисления парковочного маршрута в соответствии с результатом определения результата обнаружения.
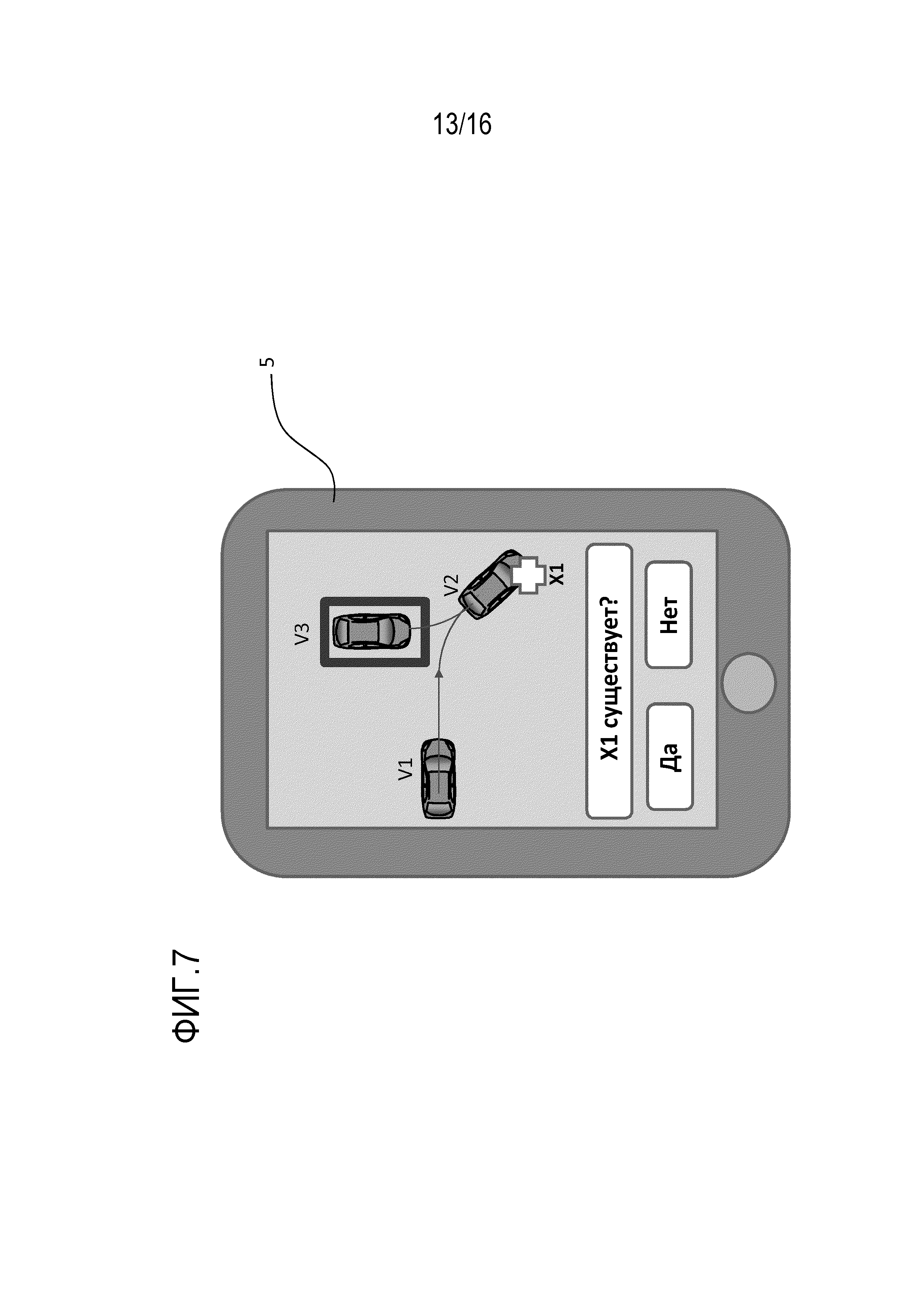
ФИГ. 7 – пример отображения на терминальном устройстве при запрашивании определения результата обнаружения.
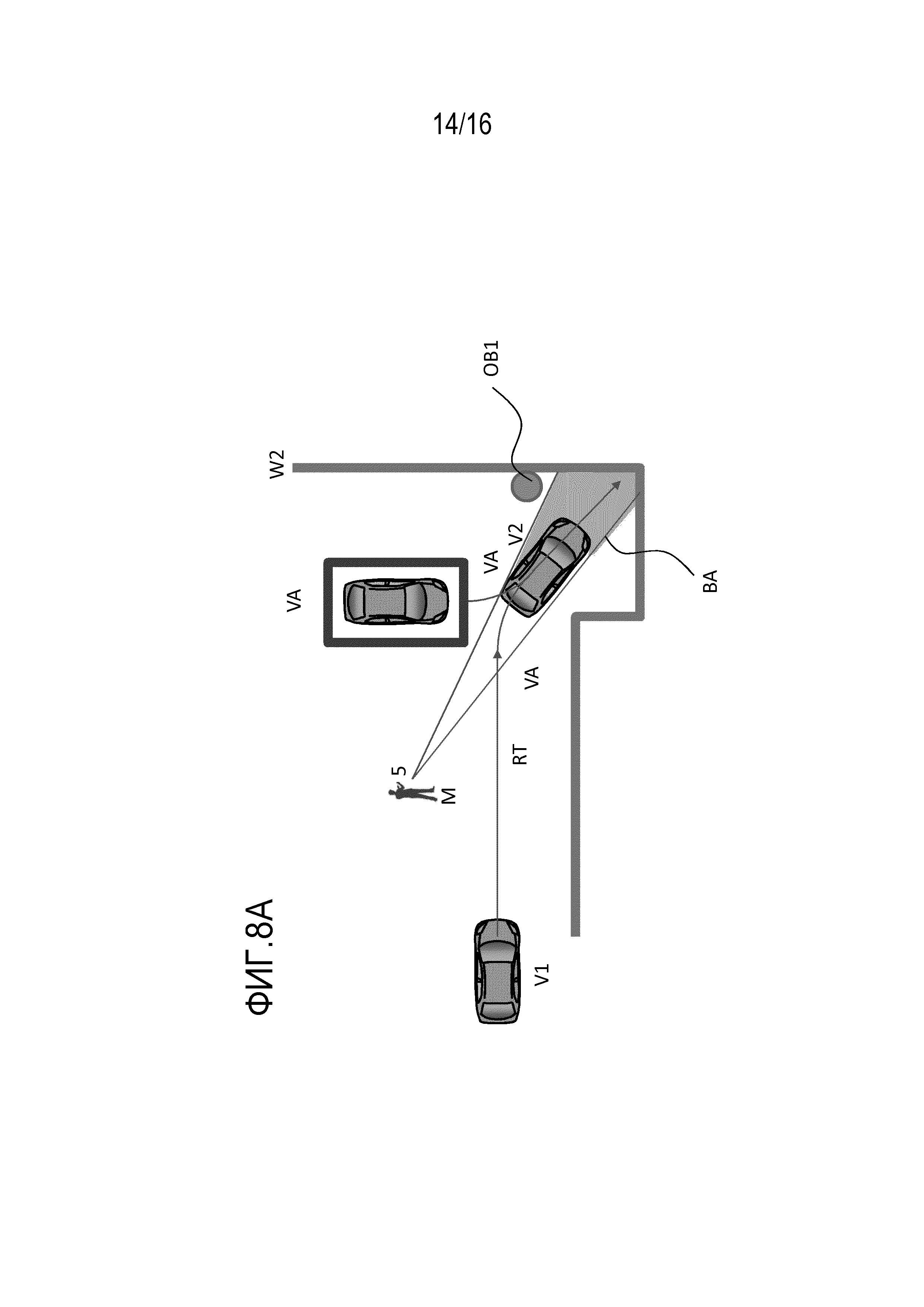
ФИГ. 8А – рисунок для описания состояния, в котором препятствие существует в зоне визуального распознавания.
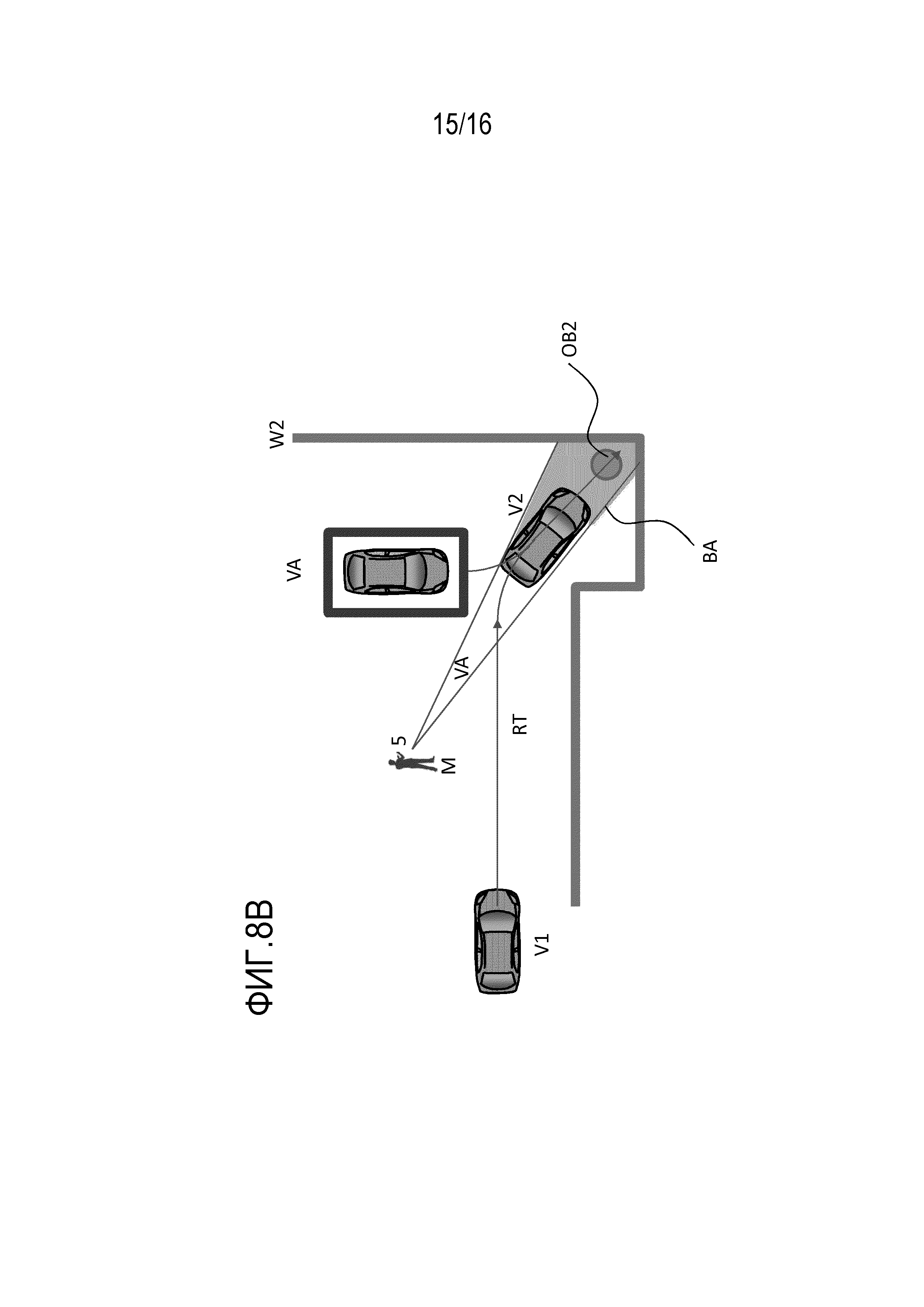
ФИГ. 8B – рисунок для описания состояния, в котором препятствие существует в визуально не распознаваемой зоне (слепой зоне).
ФИГ. 9 – вторая блок-схема последовательности операций, иллюстрирующая пример схемы вычисления парковочного маршрута в соответствии с результатом определения результата обнаружения.
Вариант(ы) осуществления настоящего изобретения
[0009] Далее один или более вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В этих вариантах осуществления настоящее изобретение будет описано на примере случая, в котором устройство управления парковкой по настоящему изобретению применяется в системе управления парковкой. Устройство управления парковкой также может быть применено в портативном операционном терминале (приборе, таком как смартфон или карманный персональный компьютер (КПК)), способном обмениваться информацией с бортовым оборудованием. Способ управления парковкой в соответствии с настоящим изобретением может использоваться в устройстве управления парковкой, которое будет описано ниже.
[0010] На ФИГ. 1 показана блок-схема системы 1000 управления парковкой, включающей в себя устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения. Система 1000 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя камеры 1a–1d, дальномерные устройства 2, информационный сервер 3, операционный терминал 5, устройство 100 управления парковкой, контроллер 70 транспортного средства, систему 40 привода, датчик 50 угла поворота руля и датчик 60 скорости транспортного средства. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения функционирует для управления операцией перемещения (парковки) транспортного средства в парковочное место на основе рабочей команды, которая вводится из операционного терминала 5. В данном описании транспортное средство как цель управления парковкой будет называться «транспортным средством V».
[0011] Операционный терминал 5 представляет собой портативный компьютер, который может быть вынесен наружу из транспортного средства и имеет функцию ввода и функцию связи. Операционный терминал 5 принимает ввод рабочей команды оператором для управления вождением (работой) транспортного средства при парковке. Вождение включает в себя операции парковки (операции входа в парковочное место и выхода из парковочного места). Оператор вводит инструкции через операционный терминал 5. Инструкции включают в себя рабочую команду для выполнения парковки. Рабочая команда включает в себя выполнение/остановку управления парковкой, выбор/изменение целевого парковочного места, выбор/изменение парковочного маршрута и другую необходимую для парковки информацию. Оператор также может заставить устройство 100 управления парковкой распознавать инструкции, включающие в себя рабочую команду, без использования операционного терминала 5, например, жестом оператора.
[0012] Операционный терминал 5 включает в себя устройство связи и способен обмениваться информацией с устройством 100 управления парковкой и информационным сервером 3. Операционный терминал 5 передает рабочую команду, которая вводится вне транспортного средства, в устройство 100 управления парковкой через сеть связи и вводит рабочую команду в устройство 100 управления парковкой. Операционный терминал 5 связывается с устройством 100 управления парковкой, используя сигналы, включающие в себя уникальный идентификационный код.
[0013] Операционный терминал 5 включает в себя дисплей 53. Дисплей 53 предоставляет интерфейс ввода и различные информационные элементы. Когда дисплей 53 является дисплеем с сенсорной панелью, он имеет функцию приема рабочей команды. Операционный терминал 5 может быть портативным прибором, таким как смартфон или КПК, в котором установлены приложения для приема ввода рабочей команды, используемой в способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, и передачи этой рабочей команды устройству 100 управления парковкой.
[0014] Информационный сервер 3 является устройством предоставления информации, предусмотренным в сети, способной обеспечивать связь. Информационный сервер включает в себя устройство 31 связи и запоминающее устройство 32. Запоминающее устройство 32 включает в себя читаемую картографическую информацию 33, информацию 34 о парковке и информацию 35 о препятствиях. Устройство 100 управления парковкой и операционный терминал 5 могут обращаться к запоминающему устройству 32 информационного сервера 3, чтобы получать каждый элемент информации. Устройство 100 управления парковкой и операционный терминал 5 могут получать информацию, такую как положение парковочного места и припарковано ли в этом парковочном месте какое-то транспортное средство, с информационного сервера 3.
[0015] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя устройство 10 управления, устройство 20 ввода и устройство 30 вывода. Эти компоненты устройства 100 управления парковкой соединены друг с другом через местную контроллерную сеть (CAN) или другую бортовую локальную сеть (LAN) для взаимного обмена информацией. Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает рабочую команду, переданную от внешнего операционного терминала 5, и вводит эту рабочую команду в устройство 20 ввода. Субъектом, который вводит рабочую команду во внешний операционный терминал 5, может быть человек (пользователь, пассажир, водитель или работник стоянки). Устройство 20 ввода передает полученную рабочую команду на устройство 10 управления. Устройство 30 вывода включает в себя дисплей 31. Устройство 30 вывода уведомляет водителя об информации управления парковкой. Дисплей 31 в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой дисплей с сенсорной панелью, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, он служит устройством 20 ввода. Даже когда транспортным средством управляют на основе рабочей команды, которая вводится с операционного терминала 5, находящееся в транспортном средстве лицо (водитель или пассажир) может вводить рабочую команду, такую как команда на экстренную остановку, через устройство 20 ввода. Устройство 30 вывода может включать в себя динамик, который предоставляет информацию, касающуюся управления парковкой.
[0016] Устройство 10 управления устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой специальный компьютер, включающий в себя постоянное запоминающее устройство (ПЗУ) 12, которое хранит программу управления парковкой, центральный процессор (ЦП) 11 в качестве операционной схемы, которая исполняет сохраненную в ПЗУ 12 программу, чтобы служить в качестве устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, и оперативное запоминающее устройство (ОЗУ) 13, которое служит запоминающим устройством с произвольной выборкой.
[0017] Программа управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения является программой, предназначенной при обнаружении препятствия для запрашивания первого ввода с целью подтверждения существования препятствия или второго ввода для отрицания существования препятствия у оператора M, а при получении первого ввода – для вычисления первого парковочного маршрута при условии, что препятствие существует, и выполнения управления парковкой транспортного средства в соответствии с инструкцией управления для движения по первому парковочному маршруту. Эта программа исполняется устройством 10 управления устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения или операционным терминалом 5.
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой устройство с дистанционным управлением, которое принимает рабочую команду от внешнего и управляет движением транспортного средства для парковки транспортного средства в данное парковочное место. Во время этой операции находящееся в транспортном средстве лицо может уже находиться за пределами салона транспортного средства, или же может находиться внутри салона транспортного средства.
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения может быть автономного (автоматизированного) типа управления, при котором операция руления и операция ускорения/торможения выполняются автономно. Устройство 100 управления парковкой также может быть полуавтономного (полуавтоматизированного) типа, при котором операция руления выполняется автономно, в то время как водитель выполняет операцию ускорения/торможения.
В программе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения пользователь может произвольно выбирать целевое парковочное место, или устройство 100 управления парковкой или сама стоянка могут автоматически устанавливать целевое парковочное место.
[0018] Устройство 10 управления устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения имеет функции выполнения процесса установки положения наблюдения, процесса вычисления первой зоны и/или второй зоны, процесса вычисления парковочного маршрута, процесса расчета инструкции управления и процесса управления парковкой. Устройство 10 управления дополнительно имеет функции выполнения процесса обнаружения препятствия и вычисления парковочного маршрута с учетом положения препятствия. Каждый из вышеупомянутых процессов выполняется путем взаимодействия программного обеспечения для осуществления процесса и вышеописанного аппаратного обеспечения.
[0019] Некоторые процессы вычисления положения оператора М будут описаны со ссылкой на ФИГ. 2А-2D. Положение оператора M относится к положению, в котором оператор M наблюдает за движением транспортного средства V и выполняет операции процесса парковки. Положение оператора M может быть обнаружено на основе сигналов датчиков от датчиков, предусмотренных в транспортном средстве V, или же может быть получено путем обнаружения положения операционного терминала 5, переносимого оператором M, и вычисления положения оператора M исходя из положения операционного терминала 5. Операционный терминал 5 может быть предусмотрен в заданном положении или же может переноситься оператором М. Когда операционный терминал 5 предусмотрен в заданном положении, оператор М приходит в то положение (место), в котором предусмотрен операционный терминал 5, и использует операционный терминал 5 там. В этих случаях положение операционного терминала 5 может использоваться в качестве положения оператора М.
Как показано на ФИГ. 2А, положение оператора М обнаруживается на основе результатов обнаружения от множественных дальномерных устройств 2, предусмотренных в транспортном средстве, и/или изображений, снятых камерами 1. Положение оператора М может быть обнаружено на основе изображений, снятых камерами 1a–1d. Каждое используемое дальномерное устройство 2 может представлять собой радиолокационное устройство (радар), такое как радиолокационное устройство миллиметрового диапазона, лазерное радиолокационное устройство или ультразвуковое радиолокационное устройство или звуковой локатор (сонар). Множественные дальномерные устройства 2 и их результаты обнаружения могут быть идентифицированы, и поэтому положение оператора M может быть обнаружено на основе результатов обнаружения. Дальномерные устройства 2 могут быть предусмотрены в тех же положениях, что и камеры 1a–1d, или могут также быть предусмотрены в иных положениях. Устройство 10 управления также может обнаруживать жест оператора M на основе снятых камерами 1a–1d изображений и идентифицировать рабочую команду, связанную с этим жестом.
Как показано на ФИГ. 2B, положение операционного терминала 5 или оператора M, несущего операционный терминал 5, также может быть обнаружено на основе радиоволновой связи между множественными антеннами 211, предусмотренными в разных положениях транспортного средства V и операционного терминала 5. Когда множественные антенны 211 обмениваются данными с одним операционным терминалом 5, интенсивность принимаемой радиоволны каждой антенны 211 отличается. Положение операционного терминала 5 может быть вычислено на основе разности интенсивностей между принятыми радиоволнами антенн 211. Двумерное положение и/или трехмерное положение операционного терминала 5 или оператора М может быть вычислено по разности интенсивностей между принятыми радиоволнами антенн 211.
Как показано на ФИГ. 2C, заданное положение (направление/расстояние: D1, D2) по отношению к сиденью водителя DS транспортного средства V может быть предварительно назначено как рабочее положение оператора М или как положение, в котором расположен операционный терминал 5. Например, когда оператор M временно останавливает транспортное средство V в назначенном положении и покидает транспортное средство V, чтобы задействовать операционный терминал 5, предусмотренный в заданном положении, можно обнаружить начальное положение оператора M относительно транспортного средства V или начальное положение носимого оператором М терминала 5 относительно транспортного средства V.
Как показано на ФИГ. 2D аналогичным образом, информация изображения, представляющая рабочее положение (положение, в котором находится оператор M: положение работы) по отношению к транспортному средству V, отображается на дисплее 53 операционного терминала 5. Это управление отображением может быть выполнено приложением, сохраненным на операционном терминале 5, или же может быть выполнено на основе команды от устройства 10 управления.
[0020] В одном или более вариантах осуществления настоящего изобретения вычисляется положение наблюдения оператора M для вычисления первой зоны, которую оператор M может визуально распознать, или второй зоны (слепой зоны), которую оператор M не может визуально распознать. При вычислении первой зоны (или второй зоны) обнаруженное двумерное положение оператора М может быть вычислено как положение наблюдения. В таком расчете может учитываться положение глаза оператора М (информация о высоте). Положение, соответствующее положению глаза оператора М, вычисляется как положение наблюдения на основе двумерного положения операционного терминала 5, полученного по вышеупомянутой схеме. Положение наблюдения может быть рассчитано с использованием предварительно установленной высоты стоящего оператора М или средней высоты стоящего взрослого. Когда сигнал обнаружения, представляющий информацию о местоположении операционного терминала 5, включает в себя информацию о высоте, положение операционного терминала 5 может использоваться в качестве положения наблюдения.
[0021] Процесс обнаружения препятствия будет описан со ссылкой на ФИГ. 3А и 3В. К препятствиям относятся конструкции и сооружения, такие как стены и столбы парковки, установки вокруг транспортного средства, пешеходы, другие транспортные средства, припаркованные транспортные средства и т. д.
Как показано на ФИГ. 3А, препятствие обнаруживается на основе результатов обнаружения от множественных дальномерных устройств 2, предусмотренных в транспортном средстве V, и изображений, снятых камерами 1. Дальномерные устройства 2 обнаруживают наличие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта на основе принятых сигналов от радаров. Дополнительно или в качестве альтернативы, наличие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта могут быть обнаружены на основе изображений, снятых камерами 1a–1d. Обнаружение препятствия может быть осуществлено камерами 1a–1d с использованием стереоскопического метода движения. Результаты обнаружения используются для определения того, является ли парковочное место пустым или нет (припарковано ли на этом парковочном месте какое-то транспортное средство или нет).
Как показано на ФИГ. 3B, препятствия, включая конструкции, такие как стены и столбы парковки, могут быть обнаружены на основе информации 34 о парковке, полученной из запоминающего устройства 32 информационного сервера 3. Информация о парковке включает в себя местоположение и идентификационный номер каждой парковки, а также информацию о местоположении проходов, столбов, стен, мест для хранения и т. д. на стоянке. Информационным сервером 3 может управлять персонал парковки.
[0022] Далее будет описан процесс вычисления зоны визуального распознавания (первой зоны), которая визуально распознаваема оператором M, и/или слепой зоны (второй зоны), которая визуально не распознаваема оператором M. Исходя из взаимного расположения положения препятствия и положения оператора M, устройство 10 управления вычисляет первую зону, которую оператор M может наблюдать из вычисленного положения наблюдения оператора M. Устройство 10 управления вычисляет в качестве первой зоны ту зону, в которой поле зрения не затенено препятствием, когда оператор М наблюдает из своего положения наблюдения. Устройство 10 управления вычисляет в качестве второй зоны ту зону, в которой поле зрения затенено препятствием, когда оператор М наблюдает из своего положения наблюдения. Вторая зона, которая невидима или визуально не распознаваема оператором М, может быть рассчитана по их взаимному с препятствием расположению. Слепая зона, вызванная не только препятствием, но и подлежащим операции транспортным средством V, может быть задана как вторая зона, которая визуально не распознаваема. Устройство 10 управления вычисляет в качестве второй зоны ту зону, в которой при наблюдении оператором М из положения наблюдения поле зрения затеняется подлежащим операции транспортным средством. Вторая зона, которую оператор M не видит, может быть рассчитана по взаимному расположению с подлежащим парковке транспортным средством. Схемы, известные на момент подачи этой заявки, могут быть надлежащим образом использованы в качестве схемы расчета визуально наблюдаемой зоны и схемы расчета слепой зоны. Как будет понятно, к препятствиям относятся другие транспортные средства, не являющиеся объектами операции. С точки зрения уменьшения расчетной нагрузки устройство 10 управления может сначала вычислить вторую зону и установить зону, отличную от второй зоны, в качестве первой зоны. Дополнительно или в качестве альтернативы, вторая зона может быть установлена относительно широкой зоной с учетом точности обнаружения препятствия, а далее будет описана точность обнаружения положения оператора М.
[0023] ФИГ. 4А иллюстрирует пример случая, в котором возникает слепая зона из–за конструкции парковки. В примере, показанном на ФИГ. 4A, транспортное средство V1 движется по парковочному маршруту RT, и оператор M, стоящий сбоку от транспортного средства V1, эксплуатирует операционный терминал 5. Устройство 10 управления вычисляет в качестве первой зоны VA ту зону, которая может быть оценена как визуально распознаваемая без затенения другим объектом, когда оператор М наблюдает из положения VP наблюдения. В примере по ФИГ. 4А поле зрения оператора М затенено стеной W парковки. Устройство 10 управления вычисляет в качестве второй зоны BA ту зону, которая оценена как скрытая за стеной W и визуально не распознаваема, когда оператор M наблюдает из положения VP наблюдения.
ФИГ. 4B иллюстрирует пример случая, когда слепая зона возникает из–за самого подлежащего управлению транспортного средства. Устройство 10 управления в качестве первой зоны VA вычисляет ту зону, которая может быть оценена как визуально распознаваемая без затенения другим объектом, когда оператор М наблюдает из положения VP наблюдения. В примере по ФИГ. 4B поле зрения оператора M затенено транспортным средством V2, которое расположено в положении поворота для парковки на предполагаемом парковочном маршруте. Устройство 10 управления вычисляет в качестве второй зоны BA ту зону, которая оценивается как скрытая за транспортным средством V2 и визуально не распознаваемая, когда оператор M наблюдает из положения VP наблюдения. Устройство 10 управления предварительно сохраняет информацию о транспортном средстве, такую как высота и размер транспортного средства, которая используется при вычислении второй зоны BA. Информация о транспортном средстве может быть уникальной для транспортного средства информацией или же может быть информацией, определенной в соответствии с типом транспортного средства и т.п.
Как показано на ФИГ. 4C, исходя из интенсивности принятых радиоволн, создания отраженных волн, возникновения помех и многолучевого распространения и т. д. между устройством 51 связи и антенной 511 операционного терминала 5 и устройством 21 связи и антеннами 211 устройства 21 связи устройства 100 управления парковкой, по положению стены парковки или формы пространства может быть определено наличие углубления, а наличие слепой зоны может быть определено на основе результата этого определения.
[0024] Процедура управления парковкой будет описана ниже со ссылкой на блок–схему, показанную на ФИГ. 5 .
На ФИГ. 5 показана блок–схема последовательности операций, иллюстрирующая процедуру управления процессом управления парковкой, выполняемым системой 1000 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения. Триггер для запуска процесса управления парковкой конкретно не ограничен, и процесс управления парковкой может запускаться операцией включения пускового переключателя устройства 100 управления парковкой.
[0025] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения имеет функцию автономного перемещения транспортного средства V в парковочное место на основе рабочей команды, полученной извне транспортного средства.
[0026] На этапе 101 устройство 10 управления устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения получает сигналы дальности от дальномерных устройств 2, которые прикреплены к множественным участкам транспортного средства V. Устройство 10 управления получает изображения, захваченные камерами 1a–1d, прикрепленными к множественным участкам транспортного средства V. Хотя это и не ограничено конкретным образом, камера 1a расположена на части передней решетки транспортного средства V, камера 1d расположена вблизи заднего бампера, а камеры 1b и 1c расположены на нижних частях правого и левого зеркал заднего вида. Каждая из камер 1a–1d может быть камерой, имеющей широкоугольный объектив с широким углом обзора. Камеры 1a–1d захватывают изображения пограничных линий парковочных мест вокруг транспортного средства V и объектов, существующих вокруг этих парковочных мест. Камеры 1a–1d могут быть камерами на приборах с зарядовой связью (ПЗС), инфракрасными камерами или другими соответствующими устройствами формирования изображения.
[0027] На этапе 102 устройство 10 управления обнаруживает те парковочные места, на которые возможна парковка. Устройство 10 управления обнаруживает рамки (зоны) парковочных мест на основе снятых камерами 1a–1d изображений. Устройство 10 управления обнаруживает пустые парковочные места, используя данные обнаружения от дальномерных устройств 2 и данные обнаружения, извлеченные из снятых изображений. Устройство 10 управления обнаруживает доступные парковочные места среди парковочных мест. Доступные парковочные места – это те парковочные места, которые пусты (т. е. где не припаркованы другие транспортные средства) и к которым можно рассчитать маршруты для совершения парковки. Информация о доступных парковочных местах может быть получена с информационного сервера 3. В одном или более вариантах осуществления настоящего изобретения условие, что парковочный маршрут может быть рассчитан, означает, что траектория парковочного маршрута из текущего положения до целевого парковочного места может быть воспроизведена по координатам поверхности дороги без затруднений со стороны препятствий (включая припаркованные транспортные средства).
[0028] На этапе 103 устройство 10 управления передает доступные парковочные места в операционный терминал 5, управляет дисплеем 53 для отображения доступных парковочных мест и запрашивает оператора ввести информацию о выборе целевого парковочного места для парковки транспортного средства. Целевое парковочное место может быть автоматически выбрано устройством 10 управления или стоянкой. Когда рабочая команда указания парковочного места введена в операционный терминал 5, это парковочное место устанавливается в качестве целевого парковочного места.
[0029] В одном или более вариантах осуществления настоящего изобретения на этапе 104 устройство 10 управления получает рабочую информацию от оператора M, который вышел из транспортного средства. Устройство 10 управления подтверждает, что получение рабочей информации, необходимой для процесса парковки, завершено. Затем начинается процесс движения транспортного средства к целевому парковочному месту с помощью дистанционного управления. Целевое парковочное место может быть выбрано оператором M после того, как оператор M выйдет из транспортного средства.
[0030] На этапе 105 устройство 10 управления вычисляет положение оператора M (положение наблюдения) с использованием ранее описанной схемы. На этапе 105 устройство 10 управления вычисляет первую зону, наблюдаемую оператором M из положения VP наблюдения. Первую зону вычисляют, исходя из положения препятствия. Устройство 10 управления вычисляет вторую зону BA, не наблюдаемую оператором M из положения VP наблюдения. Вторую зону вычисляют, исходя из положения препятствия. Положение препятствия относится к положению зоны, в которой существует препятствие. То есть, положение препятствия представлено значениями координат занятой препятствием зоны в трехмерных координатах.
[0031] За этапом 105 следует этап 106, на котором устройство 10 управления использует ранее описанную схему для обнаружения существования препятствия и положения, в котором существует препятствие.
[0032] На этапе 107 устройство 10 управления подтверждает определение, введенное/сделанное оператором M в отношении результата обнаружения препятствия, и вычисляет парковочный маршрут и инструкцию управления для движения по парковочному маршруту в соответствии с результатом определения.
[0033] ФИГ. 6 иллюстрирует подпрограмму этапа 107. Этот процесс выполняют, когда есть выходной сигнал, указывающий на то, что обнаружено препятствие (этап 120). Устройство 10 управления устройства 100 управления парковкой может выполнять каждый процесс, или операционный терминал 5 может эксплуатироваться для выполнения каждого процесса. Блок арифметической обработки операционного терминала 5 может выполнять каждый процесс, или устройство 10 управления может эксплуатироваться для выполнения каждого процесса. На этапе 121 оценивают уровень достоверности результата обнаружения. Дальномерные устройства 2 выводят вместе с результатом обнаружения уровень достоверности или вероятность в качестве достоверности результата обнаружения. Дальномерные устройства 2 определяют, что чем выше интенсивность полученных сигналов, или чем больше количество сигналов, или чем меньше изменение распределения сигналов, тем выше уровень достоверности результата обнаружения. Дальномерные устройства 2 рассчитывают уровень достоверности или вероятность на основе интенсивности, количества и распределения сигналов, используемых при выведении результата обнаружения того, что препятствие существует.
[0034] При обнаружении препятствия на основе изображений, снятых камерами 1, функция обработки изображений для выполнения обнаружения препятствия служит для вывода уровня достоверности или вероятности вместе с результатом обнаружения с учетом положения и размера препятствия, скорости сопоставления с шаблоном и влияния помех в среде формирования изображения. Функция обработки изображений служит для вычисления уровня достоверности на основе уровня надежности процесса выделения края в процессе обнаружения препятствия. Например, уровень достоверности препятствия, обнаруживаемого по снятым изображениям, рассчитывается с использованием таких факторов, как большая отличие контраста пикселей при выделении края, высокая непрерывность края, длина длинного края и низкое изменение положения края. Дополнительно или в качестве альтернативы, уровень достоверности препятствия, обнаруживаемого по снятым изображениям, рассчитывается на основе скорости сопоставления при сравнении с образцом между признаками, такими как размер, форма и перемещение извлеченного объекта, и признаками объектов, существующих на дороге.
[0035] На этапе 121 устройство 10 управления оценивает уровень достоверности результата обнаружения. Когда уровень достоверности меньше первого заданного значения, процесс переходит к этапу 151. Устройство 10 управления определяет, что уровень достоверности результата обнаружения препятствия является низким (первый уровень), и не дает оповещения оператору M (этап 151). Тогда парковочный маршрут рассчитывается исходя из предположения, что препятствия не существует (этап 152).
[0036] На этапе 121, когда уровень достоверности меньше, чем первое заданное значение, процесс переходит к этапу 122. В этом случае может быть сделано определение, что уровень достоверности результата обнаружения является средним или высоким уровнем. На этапе 122 устройство 10 управления определяет, является ли уровень достоверности результата обнаружения вторым заданным значением или более высоким. Когда уровень достоверности является вторым заданным значением или более высоким, делается определение, что уровень достоверности является высоким (третий уровень), и процесс переходит к этапу 141. На этапе 141 устройство 10 управления не представляет существование препятствия оператору М. В случае результата обнаружения с высоким уровнем достоверности весьма вероятно, что объект существует. Это также очевидно оператору M, поэтому существование препятствия не представляется оператору M, как указано выше, поскольку затраты на подтверждение существования препятствия будут, вероятно, потрачены впустую. Конечно, с точки зрения осторожности, результат обнаружения может быть представлен оператору М для подтверждения существования препятствия. На этапе 141 устройство 10 управления придает большую важность результату обнаружения с высоким уровнем достоверности и рассчитывает парковочный маршрут, исходя из предположения о наличии препятствия.
[0037] Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения характеризуется тем откликом, когда уровень достоверности является средним (второй уровень), а уровень достоверности результата обнаружения является неопределенным. Когда уровень P достоверности результата обнаружения равен первому заданному значению или больше него и меньше второго заданного значения (второе заданное значение>P>первое заданное значение) в результате определения на этапе 122, выполняемый устройством 10 управления процесс переходит к этапу 123. На этапе 123 устройство 10 управления оповещает оператора М о результате обнаружения препятствия. Для результата обнаружения со средним уровнем достоверности устройство 10 управления подтверждает определение, введенное/сделанное оператором М, поскольку неясно, является ли результат обнаружения правильным или неправильным. Когда уровень достоверности находится в пределах заданного порогового диапазона, трудно оценить уровень достоверности результата обнаружения. В одном или более вариантах осуществления настоящего изобретения, когда уровень достоверности находится в пределах заданного порогового диапазона, оператор M запрашивается сделать первый ввод или второй ввод, и результат обнаружения оценивается снова. Это позволяет рассчитывать парковочный маршрут и инструкцию управления на основе результата обнаружения с высоким уровнем достоверности.
[0038] Результат обнаружения препятствия передается на операционный терминал 5. Устройство 10 управления может уведомить внешнего оператора о наличии препятствия путем включения устройства 80 оповещения, такого как фары, мигающие световые сигналы, сигналы аварийной остановки (сигнальные лампы), задние фонари или внутренние фонари, предусмотренные в транспортном средстве V. Примеры устройства 80 оповещения также включает стеклоочиститель, звуковой сигнал, динамик и устройство отображения. Стеклоочиститель может быть задействован для уведомления внешнего оператора о наличии препятствия. Дополнительно или в качестве альтернативы, звуковой сигнал и/или динамик могут быть задействованы для вывода звуковой или голосовой информации с тем, чтобы уведомить внешнего оператора о наличии препятствия. Дополнительно или в качестве альтернативы, устройство отображения может быть задействовано для представления текстовой информации и/или изобразительной информации внешнему оператору, чтобы уведомить внешнего оператора о наличии препятствия. Используя устройство 80 оповещения для уведомления оператора М о наличии препятствия, можно легко получить подтверждение, введенное/сделанное оператором М.
[0039] На этапе 124 устройство 10 управления запрашивает у оператора М определение результата обнаружения существования препятствия. Устройство 10 управления уведомляет оператора M о наличии препятствия и запрашивает первый ввод для подтверждения существования препятствия или второй ввод для отрицания существования препятствия. Устройство 10 управления выводит на операционный терминал 5 инструкцию для отображения наличия препятствия на дисплее 53 операционного терминала 5. Операционный терминал 5 может отображать наличие препятствия на дисплее 53. Оператор М может быть надежно уведомлен о наличии препятствия. Кроме того, операционный терминал 5 принимает первый ввод или второй ввод через устройство 52 ввода. Устройство 52 ввода может быть устройством 52 ввода с сенсорной панелью или микрофоном с голосовым вводом. В этом примере дисплей 53 с сенсорной панелью также служит устройством 52 ввода. Операционный терминал 5 может использоваться для того, чтобы представить препятствие, заставить оператора М определить наличие препятствия и получить результат такого определения. Оператор М может легко указать результат определения.
[0040] ФИГ. 7 иллюстрирует пример информации, отображаемой на дисплее 53, когда у оператора М запрашивается первый ввод или второй ввод. Эта информация запроса подтверждения представляется на дисплее 53 операционного терминала 5. Как показано на ФИГ. 7, устройство 10 управления представляет оператору M различные положения V1, V2 и V3 во времени парковки транспортного средства V, парковочный маршрут и препятствие X1, которое существует в положении V2 поворота для парковки. Информация запроса подтверждения, отображаемая на операционном терминале 5, спрашивает оператора М, существует ли препятствие X1 или нет. Операционный терминал 5 может отображать вопрос «X1 существует?» текстом или же может выводить этот вопрос голосом. Оператор M касается кнопки «Да», когда X1 может быть визуально распознан, или касается кнопки «Нет», когда X1 не может быть визуально распознан. Дополнительно или в качестве альтернативы, определение того, что X1 не существует, может быть введено в операционный терминал 5 посредством второго ввода, который сделан так, что оператор M стирает знак «плюс», указывающий положение препятствия, чтобы удалить его. Дополнительно или в качестве альтернативы, определение того, что X1 существует, может быть введено в операционный терминал 5 посредством первого ввода, который сделан так, что оператор М дважды касается знака «плюс», указывающего положение препятствия.
[0041] На этапе 125, когда сделан первый ввод, то есть когда существование препятствия подтверждено, процесс переходит к этапу 126, на котором устройство 10 управления вычисляет первый парковочный маршрут в предположении, что препятствие существует, и вычисляет инструкцию управления для движения транспортного средства V по первому парковочному маршруту. Таким образом, транспортное средство V может двигаться по парковочному маршруту, избегая при этом препятствия, на основании результата подтверждения, введенного/сделанного оператором M, и поэтому управление парковкой может выполняться независимо от точности результата обнаружения препятствия.
[0042] С другой стороны, когда сделан второй ввод, то есть когда существование препятствия отклонено, процесс переходит к этапу 127, на котором устройство 10 управления вычисляет второй парковочный маршрут в предположении, что препятствия не существует, и вычисляет инструкцию управления для движения транспортного средства V по второму парковочному маршруту. Транспортное средство V может двигаться по парковочному маршруту в предположении, что препятствия не существует, на основании результата подтверждения, введенного/сделанного оператором М, и поэтому управление парковкой может выполняться независимо от точности результата обнаружения препятствия.
[0043] В вышеописанном процессе устройство 10 управления и/или операционный терминал 5 могут запрашивать первый ввод или второй ввод у оператора M, когда расстояние между оператором M и препятствием меньше заданного значения. Это связано с тем, что когда препятствие существует в удаленном от оператора М положении, считается, что уровень надежности определения, введенного/сделанного оператором М, низок. Таким образом, первый ввод или второй ввод запрашивается тогда, когда расстояние между оператором М и препятствием меньше заданного значения, и поэтому возможно уменьшить выполнение управления парковкой на основе ошибочного определения и обеспечить точность определения, введенного/сделанного оператором М.
[0044] В вышеупомянутом процессе устройство 10 управления и/или операционный терминал 5 могут вынуждать транспортное средство V останавливаться, когда расстояние между оператором М и препятствием не меньше, чем заданное значение. Когда препятствие существует в местоположении, удаленном от оператора М на заданное расстояние или более, считается, что уровень надежности определения, введенного/сделанного оператором М, низок; следовательно, транспортное средство V останавливают и управление парковкой отменяют. Таким образом, можно уменьшить выполнение управления парковкой на основе ошибочного определения, введенного/сделанного оператором M, и обеспечить точность определения, введенного/сделанного оператором M.
[0045] В вышеописанном процессе устройство 10 управления и/или операционный терминал 5 могут запрашивать первый ввод или второй ввод у оператора M, когда положение препятствия принадлежит зоне VA визуального распознавания оператором M. Зона VA визуального распознавания оператором M рассчитывается с использованием описанной выше схемы. То есть, когда положение препятствия принадлежит зоне VA визуального распознавания оператором M, транспортное средство V паркуется в соответствии с инструкцией управления для движения по первому парковочному маршруту. ФИГ. 8A иллюстрирует пример, когда обнаруженное препятствие OB1 существует в пределах зоны VA визуального распознавания. Когда препятствие OB1 существует в пределах первой зоны VA, в которой препятствие OB1 визуально распознаваемо оператором M, считается, что уровень надежности определения, введенного/сделанного оператором M, высок. Первый ввод или второй ввод запрашиваются тогда, когда оператор М может визуально распознать препятствие, и поэтому можно уменьшить выполнение управления парковкой на основе ошибочного определения и обеспечить точность определения, введенного/сделанного оператором М.
[0046] В вышеупомянутом процессе устройство 10 управления и/или операционный терминал 5 могут вынуждать транспортное средство V останавливаться, когда положение препятствия принадлежит слепой зоне BA, отличной от зоны VA визуального распознавания оператором M. ФИГ. 8B иллюстрирует пример, когда обнаруженное препятствие OB2 существует в пределах слепой зоны BA. Когда препятствие существует в пределах зоны, в которой препятствие визуально не распознаваемо оператором М, считается, что уровень надежности определения, введенного/сделанного оператором М, низок; следовательно, транспортное средство V останавливают и управление парковкой отменяют. Таким образом, можно уменьшить выполнение управления парковкой на основе ошибочного определения, введенного/сделанного оператором M, и обеспечить точность определения, введенного/сделанного оператором M.
[0047] Обращаясь снова к ФИГ. 5, на этапе 107 устройство 10 управления вычисляет парковочный маршрут от положения ожидания парковки транспортного средства до целевого парковочного места. На этом этапе устройство 10 управления вычисляет инструкцию управления для того, чтобы транспортное средство двигалось по парковочному маршруту. Инструкция управления включает в себя инструкцию по работе для любого одного или более из величины поворота руля, скорости поворота руля, ускорения поворота руля, положения переключения передач, скорости, ускорения и замедления транспортного средства. Кроме того, инструкция управления включает в себя время выполнения или положение выполнения вышеуказанной инструкции по работе транспортного средства.
[0048] Устройство 10 управления предварительно хранит необходимую для инструкции управления информацию о технических характеристиках транспортного средства. Примеры инструкции управления включают в себя инструкции по величине поворота руля, скорости поворота руля, ускорению поворота руля, положению переключения передач, скорости (включая нулевую), ускорению и замедлению транспортного средства, которые связаны с временем или положением, когда транспортное средство движется по парковочному маршруту, и другие инструкции по работе. Инструкция о парковочном маршруте и инструкция по работе, связанная с парковочным маршрутом, выполняются транспортным средством, и тем самым транспортное средство может перемещаться (парковаться) в целевое парковочное место.
[0049] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения функционирует для выполнения процесса управления парковкой с дистанционным управлением для выполнения парковки посредством передачи команды установки целевого парковочного места, команды запуска процесса управления парковкой, команды прерывания/отмены парковки и других соответствующих команд извне к транспортному средству V1, не требуя от оператора сесть на транспортное средство V1. На этапе 108 устройство 10 управления управляет дисплеем 53 операционного терминала 5 для представления парковочного маршрута. На этапе 108, когда оператор подтверждает парковочный маршрут и вводит инструкцию на выполнение, операционный терминал 5 передает инструкцию на выполнение, которая введена оператором, в устройство 100 управления парковкой транспортного средства V. Устройство 100 управления парковкой транспортного средства V работает, начиная управление парковкой.
[0050] На этапе 110, после начала управления парковкой, устройство 10 управления периодически выполняет процесс обнаружения препятствия. Наличие препятствия и его положение меняются со временем. Визуально распознаваемая первая зона и визуально не распознаваемая вторая зона также меняются по мере изменения положения транспортного средства V. Чтобы отреагировать на изменение ситуации, устройство 10 управления выполняет процесс обнаружения препятствия в заданном цикле. На этапе 111 устройство 10 управления определяет, есть ли изменение в результате обнаружения препятствия или нет. Когда изменение есть, парковочный маршрут (включая положение поворота для парковки) и инструкция управления также изменяются; поэтому на этапе 112 парковочный маршрут и инструкцию управления вычисляют снова. Когда вычислен новый парковочный маршрут, парковочный маршрут обновляется. Устройство 10 управления вычисляет инструкцию управления для нового парковочного маршрута. На этапе 111, когда нет изменений в результате обнаружения препятствия, нет необходимости вычислять новый парковочный маршрут и новую инструкцию управления, и процесс переходит к этапу 113. Процесс вычисления парковочного маршрута и инструкции управления в основном такой же, как на этапе 107.
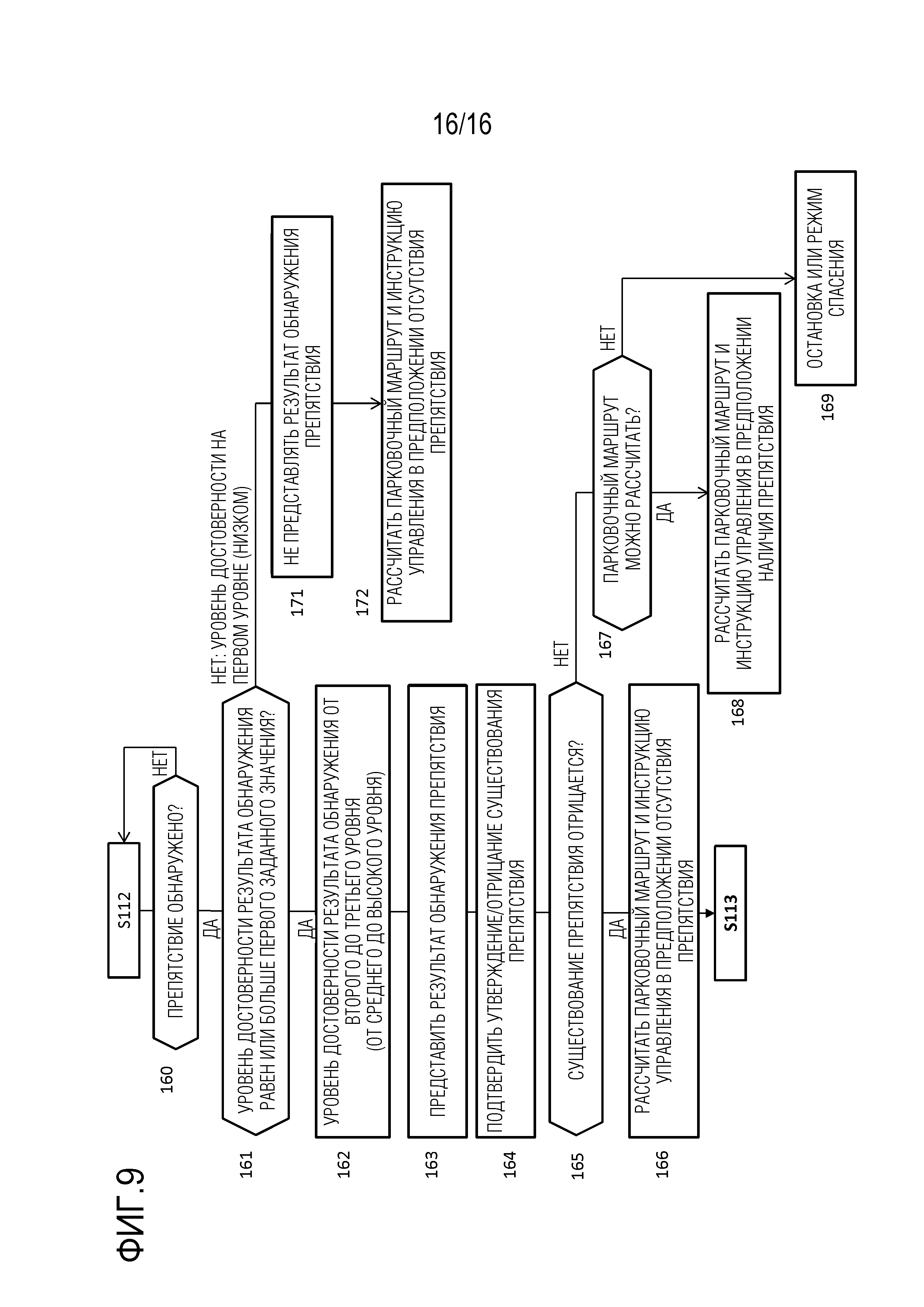
[0051] ФИГ. 9 иллюстрирует подпрограмму этапа 112. Когда устройство 10 управления обнаруживает препятствие на этапе 160, процесс переходит к этапу 161. Когда сделано определение, что уровень достоверности результата обнаружения меньше (ниже), чем первое заданное значение, процесс переходит к этапу 171. Результат обнаружения препятствия с низким уровнем достоверности не представляется оператору М. На этапе 172 устройство 10 управления вычисляет парковочный маршрут и инструкцию управления в предположении, что препятствия не существует. Когда на этапе 161 делается определение, что уровень достоверности результата обнаружения равен или больше (выше), чем первое заданное значение, процесс переходит к этапу 162. Уровень достоверности результата обнаружения в этом случае составляет от второго уровня (средний уровень) до третьего уровня (высокий уровень). На этапе 163 устройство 10 управления и/или операционный терминал 5 представляет результат обнаружения препятствия оператору М. На этапе 164 устройство 10 управления и/или операционный терминал 5 запрашивает у оператора М подтверждение препятствия. Когда на этапе 165 существование препятствия отрицается, процесс переходит к этапу 166, на котором парковочный маршрут и инструкцию управления вычисляют в предположении, что препятствия не существует. По завершении процесс переходит к этапу 113 на ФИГ. 5. Когда существование препятствия утверждено, подтверждают, что парковочный маршрут может быть вычислен (этап 167), и вычисляют парковочный маршрут и инструкцию управления в предположении, что препятствие существует (этап 168). Когда парковочный маршрут не может быть вычислен, транспортное средство останавливают или выполняют процесс парковки в режиме спасения (этап 169).
[0052] На этапе 113 устройство 10 управления отслеживает изменение результата обнаружения препятствия до тех пор, пока транспортное средство V не достигнет положения поворота для парковки. Когда транспортное средство достигает положения поворота для парковки, на этапе 114 выполняют переключение передач, включенное в инструкцию управления. За этапом 114 следует этап 115, на котором управление парковкой завершают путем последовательного выполнения инструкций управления.
[0053] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения функционирует для управления работой системы 40 привода через контроллер 70 транспортного средства в соответствии с инструкцией управления, так что транспортное средство V1 движется по парковочному маршруту. Устройство 100 управления парковкой функционирует для вычисления командных сигналов системе 40 привода транспортного средства V1, такой как электродвигатель электрического усилителя руля (ЭУР), с выдачей обратной связи по выходному значению датчика 50 угла поворота руля рулевого устройства, так что траектория движения транспортного средства V1 совпадает с рассчитанным парковочным маршрутом, и передает командные сигналы в систему 40 привода или в контроллер 70 транспортного средства, который управляет системой 40 привода.
[0054] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя блок управления парковкой. Блок управления парковкой получает информацию о диапазоне переключения передач от блока управления автоматической трансмиссией/бесступенчатой трансмиссией («автоматом»/«вариатором»), информацию о скорости вращения колеса от блока управления антиблокировочной системой (АБС), информацию об угле поворота руля от блока управления углом поворота руля, информацию о частоте вращения коленчатого вала двигателя от электронного блока управления двигателем (ЭБУ) и другую необходимую информацию. На основе этого блок управления парковкой вычисляет и выводит информацию о командах автономного рулевого управления блоку управления ЭУР, информацию о командах, такую как предупреждение блоку управления счетчиком, и т. д. Устройство 10 управления получает те элементы информации, которые получаются датчиком 50 угла поворота руля рулевого устройства транспортного средства V1 и датчиком 60 скорости транспортного средства и другими датчиками транспортного средства, через контроллер 70 транспортного средства.
[0055] Система 40 привода в соответствии с одним или более вариантами осуществления настоящего изобретения приводит транспортное средство V1 в движение (перемещение) из текущего положения в целевое парковочное место путем вождения на основе управляющих командных сигналов, полученных от устройства 100 управления парковкой. Рулевое устройство управления в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой приводной механизм, который перемещает транспортное средство V в направлениях вправо и влево. Электродвигатель ЭУР, входящий в состав системы 40 привода, приводит в действие механизм рулевого управления с усилителем рулевого управления рулевого устройства на основе управляющих командных сигналов, полученных от устройства 100 управления парковкой, для управления величиной поворота руля и управляет этой операцией при движении транспортного средства V1 до целевого парковочного места. Содержание управления и схема работы при парковке транспортного средства V1 конкретно не ограничены, и может быть соответствующим образом применена любая схема, известная на момент подачи этой заявки.
[0056] Когда устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения работает, управляя транспортным средством V1 для перемещения в целевое парковочное место по парковочному маршруту, рассчитанному на основе положения транспортного средства V1 и положения целевого парковочного места, акселератором и тормозом управляют автономно на основе назначенной скорости управляемого транспортного средства (заданной скорости транспортного средства), а работа рулевого устройства управляет движением транспортного средства автономным образом в соответствии со скоростью транспортного средства.
[0057] Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения используется в устройстве управления парковкой, как указано выше, и поэтому имеет следующие эффекты. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения выполнено и работает, как указано выше, и поэтому имеет следующие эффекты.
[0058] (1) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, когда сделан первый ввод, то есть когда существование препятствия утверждено, устройство 10 управления вычисляет первый парковочный маршрут в предположении, что препятствие существует, и вычисляет инструкцию управления для движения транспортного средства V по первому парковочному маршруту. Таким образом, транспортное средство V может двигаться по парковочному маршруту, избегая препятствия, на основании результата подтверждения, введенного/сделанного оператором M, и поэтому управление парковкой может выполняться независимо от точности результата обнаружения препятствия.
[0059] (2) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, когда сделан второй ввод, то есть когда существование препятствия отклонено, устройство 10 управления вычисляет второй парковочный маршрут в предположении, что препятствия не существует, и вычисляет инструкцию управления для движения транспортного средства V по второму парковочному маршруту. Таким образом, транспортное средство V может двигаться по парковочному маршруту в предположении, что препятствия не существует, на основании результата подтверждения, введенного/сделанного оператором М, и поэтому управление парковкой может выполняться независимо от точности результата обнаружения препятствия.
[0060] (3) Способ управления парковкой согласно одному или более вариантам осуществления настоящего изобретения включает в себя запрашивание первого ввода или второго ввода, когда расстояние между оператором М и препятствием меньше заданного значения. Это связано с тем, что когда препятствие существует в удаленном от оператора М положении, считается, что уровень надежности определения, введенного/сделанного оператором М, является низким. Таким образом, первый ввод или второй ввод запрашивают тогда, когда расстояние между оператором М и препятствием меньше заданного значения, и соответствующее определение может быть получено от оператора М.
[0061] (4) В способе управления парковкой согласно одному или более вариантам осуществления настоящего изобретения устройство 10 управления и/или операционный терминал 5 вынуждает транспортное средство V останавливаться, когда расстояние между оператором М и препятствием не меньше, чем заданное значение. Когда препятствие находится в местоположении, удаленном от оператора М на заданное расстояние или более, считается, что уровень надежности определения, введенного/сделанного оператором М, является низким; поэтому транспортное средство V останавливают и отменяют управление парковкой. Таким образом, можно уменьшить выполнение управления парковкой на основе ошибочного определения, введенного/сделанного оператором М.
[0062] (5) Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя запрашивание первого ввода или второго ввода, когда положение препятствия принадлежит зоне VA визуального распознавания оператором M. Зона VA визуального распознавания оператором М рассчитывается по описанной выше схеме. Когда препятствие OB1 существует в пределах первой зоны VA, в которой препятствие OB1 визуально распознается оператором M, считается, что уровень надежности определения, введенного/сделанного оператором M, является высоким. Первый ввод или второй ввод запрашивают тогда, когда оператор М может визуально распознать препятствие, и поэтому возможно уменьшить выполнение управления парковкой на основании ошибочного определения.
[0063] (6) Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя вынуждение транспортного средства V останавливаться, когда положение препятствия принадлежит слепой зоне BA, отличной от зоны VA визуального распознавания оператором M. Когда препятствие существует в пределах зоны, в которой препятствие визуально не распознается оператором М, считается, что уровень надежности определения, введенного/сделанного оператором М, является низким; поэтому транспортное средство V останавливают и отменяют управление парковкой. Таким образом, можно уменьшить выполнение управления парковкой на основании ошибочного определения, введенного/сделанного оператором М.
[0064] (7) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, для результата обнаружения со средним уровнем достоверности, введенное/сделанное оператором М определение подтверждается, потому что неясно, является ли результат обнаружения правильным или неправильным. Когда уровень достоверности находится в пределах заданного порогового диапазона, трудно оценить уровень достоверности результата обнаружения. В одном или более вариантах осуществления настоящего изобретения, когда уровень достоверности находится в пределах заданного порогового диапазона, оператору M предлагается предоставить первый ввод или второй ввод, и результат обнаружения оценивается снова. Это позволяет рассчитывать парковочный маршрут и инструкцию управления на основе результата обнаружения с высоким уровнем достоверности.
[0065] (8) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения дисплей 53 операционного терминала 5 отображает наличие препятствия. Оператор М может быть надежно уведомлен о наличии препятствия.
[0066] (9) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, при использовании устройства 80 оповещения для уведомления оператора М о наличии препятствия, результат определения, введенный/сделанный оператором М, может быть легко получен.
[0067] (10) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения операционный терминал 5 может использоваться для того, чтобы представить препятствие, заставить оператора М определить наличие препятствия и получить результат определения. Оператор М может легко указать результат определения.
[0068] (11) Также в устройстве 100 управления парковкой, в котором выполняется способ в соответствии с одним или более вариантами осуществления настоящего изобретения, могут быть получены такие действия и эффекты, как описанные в вышеприведенных подпунктах (1) – (10).
[0069] Некоторые или все процессы процесса управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения могут выполняться в устройстве 100 управления парковкой, или устройство 100 управления парковкой может передавать инструкцию управления парковкой на операционный терминал 5, так что ее выполняет операционный терминал 5. Некоторые или все процессы процесса управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения могут выполняться в операционном терминале 5, или операционный терминал 5 может передавать инструкцию управления парковкой в устройство 100 управления парковкой, так что ее выполняет устройство 100 управления парковкой.
[0070] Поясненные выше варианты осуществления описаны для облегчения понимания настоящего изобретения, а не для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все конструктивные изменения и эквиваленты, подпадающие под технический объем настоящего изобретения.
Описание ссылочных обозначений
[0071] 1000 – Система управления парковкой
100 – Устройство управления парковкой
10 – Устройство управления
11 – ЦП
12 – ПЗУ
13 – ОЗУ
132 – Запоминающее устройство
133 – Картографическая информация
134 – Информация о парковке
135 – Информация о препятствиях
20 – Устройство ввода
21 – Устройство связи
211 – Антенна
30 – Устройство вывода
31 – Дисплей
1a–1d – Камеры
2 – Дальномерные устройства
3 – Информационный сервер
31 – Устройство связи
32 – Запоминающее устройство
33 – Картографическая информация
34 – Информация о парковке
35 – Информация о препятствиях
5 – Операционный терминал
51 – Устройство связи
511 – Антенна
52 – Устройство ввода
53 – Дисплей
200 – Бортовое оборудование
40 – Система привода
50 – Датчик угла поворота руля
60 – Датчик скорости транспортного средства
70 – Контроллер транспортного средства
80 – Устройство оповещения
V – Транспортное средство
VA – Первая зона, зона визуального распознавания
BA – Вторая зона, слепая зона.
Реферат
Изобретение относится к способу управления парковкой и устройству управления парковкой. Способ управления парковкой для осуществления парковки транспортного средства на основе рабочей команды содержит получение рабочей команды от оператора, находящегося вне транспортного средства, обнаружение препятствия, существующего вокруг транспортного средства. При обнаружении препятствия уведомление оператора о существовании препятствия и запрашивание первого ввода для подтверждения существования препятствия или второго ввода для отрицания существования препятствия и при получении первого ввода вычисление первого парковочного маршрута при условии, что препятствие существует, и осуществление парковки транспортного средства в соответствии с инструкцией управления для движения по первому парковочному маршруту. Устройство управления парковкой содержит устройство управления, выполненное с возможностью исполнения инструкции управления для осуществления парковки транспортного средства в соответствии с рабочей командой. Достигается своевременная парковка транспортного средства при обнаружении препятствия, при условии, что обнаружение является ошибочным. 2 н. и 9 з.п. ф-лы, 16 ил.
Комментарии