Устройство для определения неисправностей гибридного транспортного средства и соответствующий способ определения неисправностей - RU2653656C2
Код документа: RU2653656C2
Чертежи


Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к технологии определения того, возникает или нет неисправность при зацеплении (сбой по минимальному давлению) муфты вследствие недостаточного гидравлического давления, которое должно подаваться в муфту в гибридном транспортном средстве.
Уровень техники
[0002] JP2010-155590A раскрывает гибридное транспортное средство, в котором двигатель и электромотор размещаются последовательно, и первая муфта и вторая муфта размещаются между двигателем и электромотором и между электромотором и ведущим колесом, соответственно.
[0003] В гибридном транспортном средстве с такой конструкцией, транспортное средство движется в EV-режиме посредством использования только электромотора, когда первая муфта расцеплена, а вторая муфта зацеплена, и транспортное средство движется в HEV-режиме посредством использования двигателя и электромотора, когда первая муфта и вторая муфта зацепляются.
[0004] После начала движения или замедления с тем, чтобы останавливаться, выполняется управление плавным сцеплением/расцеплением муфты, посредством которого второй муфте разрешается проскальзывать, за счет этого реализуя плавное начало движения и остановку вне зависимости от преобразователя крутящего момента.
Сущность изобретения
[0005] В общем, то, возникает или нет неисправность при зацеплении (сбой по минимальному давлению) в муфте вследствие недостаточного гидравлического давления, которое должно подаваться в муфту, может определяться на основе разности частоты вращения (разности между частотой вращения элемента на стороне входного вала и частотой вращения элемента на стороне выходного вала) в муфте. А именно, когда разность частоты вращения возникает в муфте в ситуации, в которой муфта должна зацепляться, когда позиция переключения диапазона передач переводится в позицию движения, к примеру, D или R, можно определять то, что неисправность при зацеплении возникает в муфте.
[0006] Тем не менее, в вышеописанном гибридном транспортном средстве, вторая муфта полностью не зацепляется, поскольку она находится в состоянии проскальзывания за счет управления плавным сцеплением/расцеплением муфты, даже если позиция переключения диапазона передач переводится в позицию движения. По этой причине, во время управления плавным сцеплением/расцеплением муфты, разность частоты вращения возникает, даже если вторая муфта находится в нормальном состоянии, и даже когда неисправность при зацеплении возникает во второй муфте, разность частоты вращения не увеличивается, поскольку набор оборотов двигателя подавляется посредством рекуперации электромотора. Это делает невозможным различение между разностью частоты вращения за счет управления плавным сцеплением/расцеплением муфты и разностью частоты вращения посредством неисправности при зацеплении второй муфты и выполнение надлежащего определения неисправности при зацеплении муфты только посредством разности частоты вращения.
[0007] Когда предоставляется датчик или переключатель для обнаружения гидравлического давления, которое должно подаваться во вторую муфту, определение неисправности при зацеплении муфты может выполняться на основе гидравлического давления. Тем не менее, в этом случае необходимо предоставлять датчик или переключатель для обнаружения гидравлического давления, что приводит к повышению затрат.
[0008] Настоящее изобретение осуществлено с учетом такой технической проблемы, как вышеозначенная, и его цель заключается в том, чтобы позволить определять, даже во время управления плавным сцеплением/расцеплением муфты, то, что неисправность при зацеплении (сбой по минимальному давлению) возникает в муфте вследствие недостаточного гидравлического давления, которое должно подаваться в муфту в гибридном транспортном средстве, которое выполняет управление плавным сцеплением/расцеплением муфты.
[0009] Согласно аспекту настоящего изобретения, предоставляется устройство для определения неисправностей гибридного транспортного средства, включающее в себя двигатель и электромотор, размещаемые последовательно, муфту, размещаемую между электромотором и ведущим колесом, и механизм регулирования давления для регулирования гидравлического давления, подаваемого в муфту, и выполнения, посредством механизма регулирования давления, управления плавным сцеплением/расцеплением муфты для регулирования гидравлического давления, подаваемого в муфту, по меньшей мере, после начала движения, до гидравлического давления, заставляющего муфту проскальзывать. Устройство для определения неисправностей включает в себя средство вычисления целевой перегрузочной способности по крутящему моменту, выполненное с возможностью вычислять требуемую движущую силу на основе открытия акселератора и вычислять перегрузочную способность по крутящему моменту муфты, требуемую для передачи требуемой движущей силы посредством муфты, в качестве целевой перегрузочной способности по крутящему моменту; средство вычисления фактического крутящего момента, выполненное с возможностью вычислять фактический крутящий момент двигателя и фактический крутящий момент электромотора; средство вычисления отклонения крутящего момента, выполненное с возможностью вычислять отклонение крутящего момента в качестве отклонения между целевой перегрузочной способностью по крутящему моменту и суммой фактического крутящего момента двигателя и фактического крутящего момента электромотора; и средство определения неисправностей, выполненное с возможностью определять возникновение неисправности при зацеплении муфты, когда отклонение крутящего момента становится больше первого значения определения сбоя во время управления плавным сцеплением/расцеплением муфты.
[0010] Согласно другому аспекту настоящего изобретения, предоставляется соответствующий способ определения неисправностей.
[0011] Согласно этим аспектам, неисправность при зацеплении муфты (сбой по минимальному давлению), может определяться даже во время управления плавным сцеплением/расцеплением муфты, и в силу этого неисправность при зацеплении муфты может определяться на ранней стадии.
Краткое описание чертежей
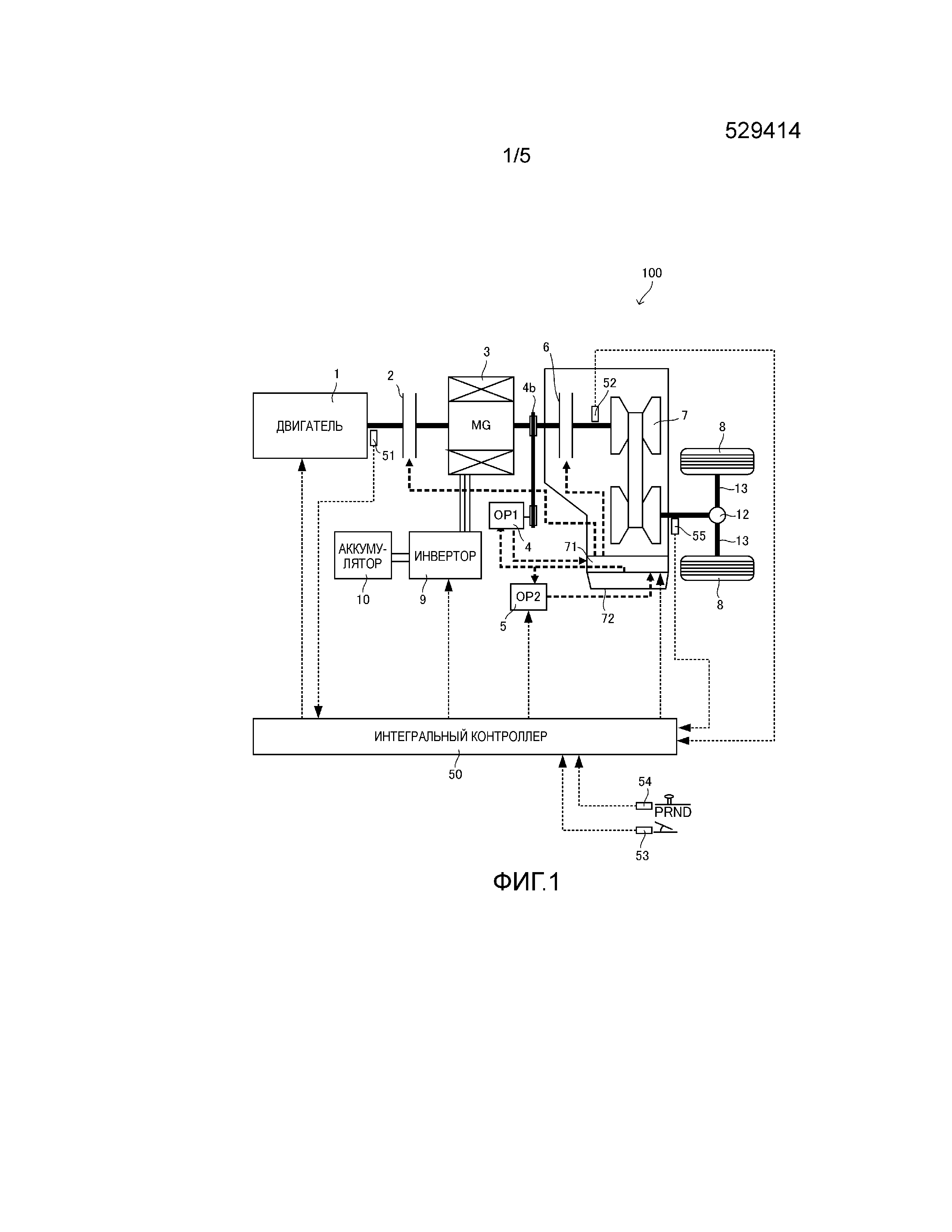
[0012] Фиг.1 является общей блок-схемой гибридного транспортного средства, к которому применяется устройство для определения неисправностей согласно варианту осуществления настоящего изобретения;
Фиг.2 является примером карты переключения режима;
Фиг.3 является блок-схемой последовательности операций, иллюстрирующей подробности обработки определения сбоя;
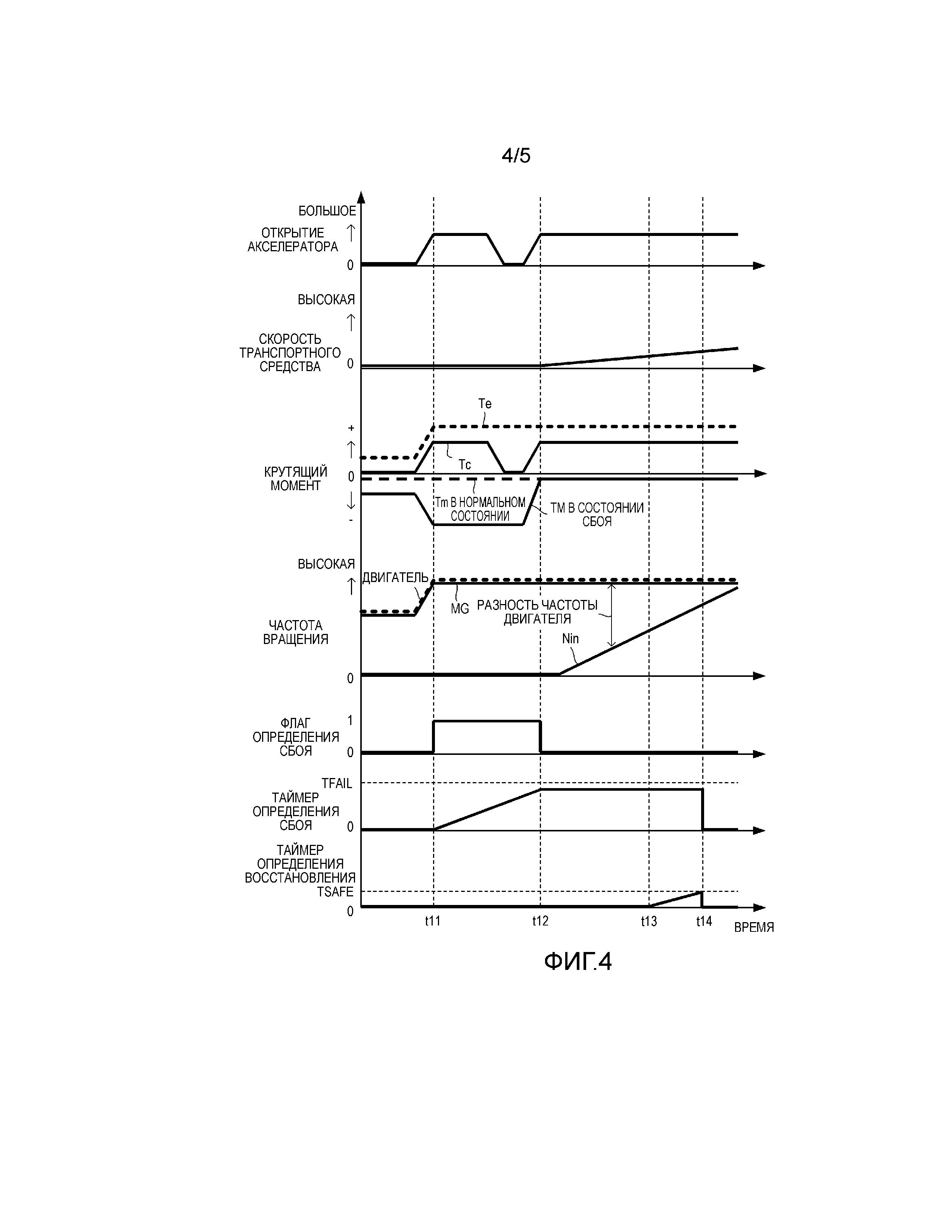
Фиг.4 является временной диаграммой, иллюстрирующей состояние, в котором выполняется определение неисправности при зацеплении второй муфты; и
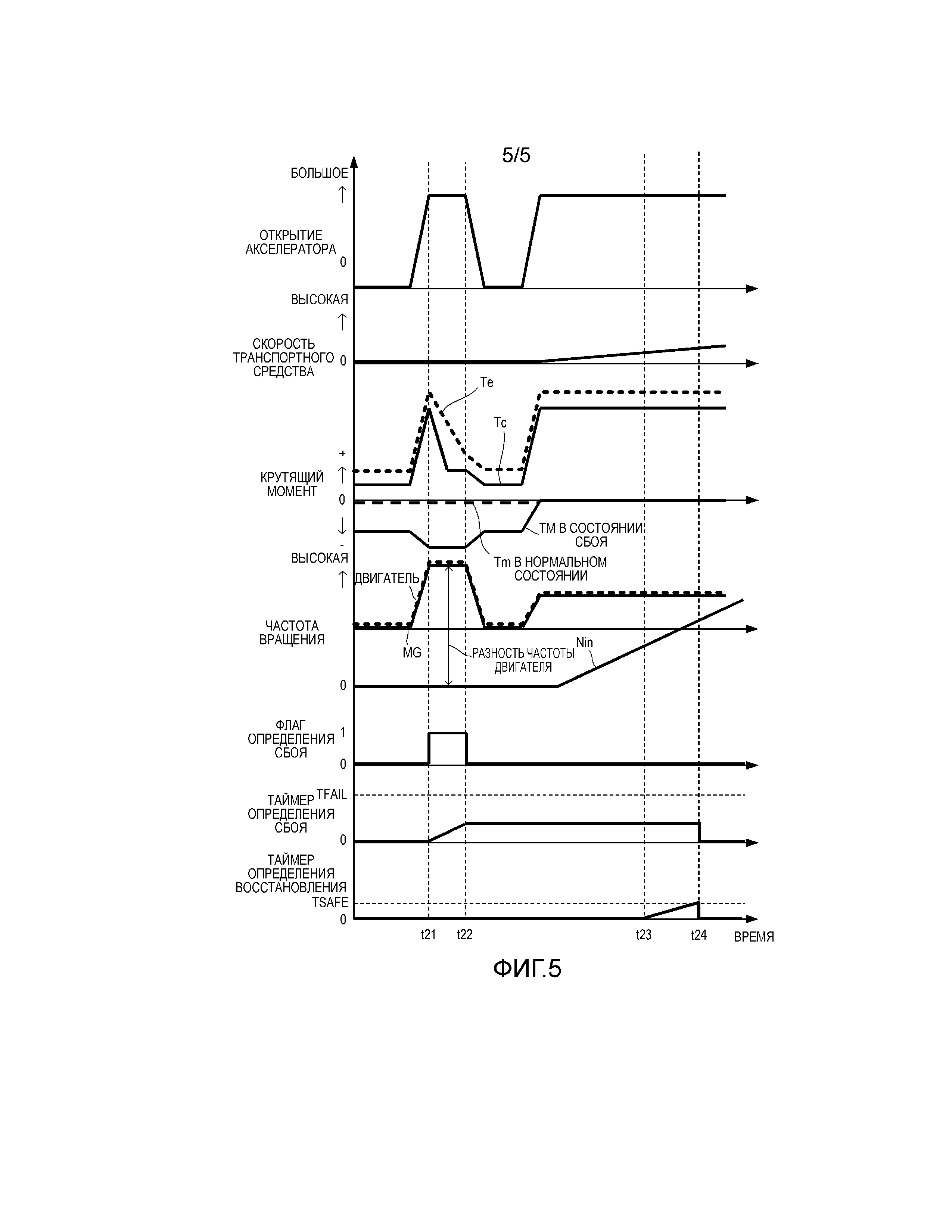
Фиг.5 является временной диаграммой, иллюстрирующей состояние, в котором выполняется определение неисправности при зацеплении второй муфты, когда рекуперация электромотора является недостаточной.
Подробное описание вариантов осуществления
[0013] Далее описывается вариант осуществления настоящего изобретения со ссылкой на прилагаемые чертежи.
[0014] Фиг.1 является общей блок-схемой гибридного транспортного средства 100 (в дальнейшем называемого "транспортным средством"). Транспортное средство 100 содержит двигатель 1, первую муфту 2, электромотор-генератор 3 (в дальнейшем называемый "MG"), первый масляный насос 4, второй масляный насос 5, вторую муфту 6, бесступенчатую трансмиссию 7 (в дальнейшем называемую CVT), ведущие колеса 8 и интегральный контроллер 50.
[0015] Двигатель 1 представляет собой двигатель внутреннего сгорания, который использует бензин, дизельное топливо и т.п. в качестве топлива, и его частота вращения, крутящий момент и т.п. управляются на основе команды из интегрального контроллера 50.
[0016] Первая муфта 2 представляет собой нормально открытую гидравлическую муфту, которая размещается между двигателем 1 и MG 3. На основе команды из интегрального контроллера 50 состояние зацепления/расцепления первой муфты 2 управляется посредством гидравлического давления, причем это давление регулируется посредством гидравлического регулирующего клапанного узла 71 посредством использования давления на выходе из первого масляного насоса 4 или второго масляного насоса 5 в качестве исходного давления. В качестве первой муфты 2 используется, например, многодисковая сухая муфта.
[0017] MG 3, размещаемый последовательно с двигателем 1, представляет собой синхронную вращающуюся электрическую машину, в которой постоянные магниты встраиваются в ротор, и обмотка статора наматывается вокруг статора. На основе команды из интегрального контроллера 50, MG 3 управляется посредством приложения трехфазного тока, которое осуществляется посредством инвертора 9. MG 3 может работать в качестве электромотора, который приводится в действие с возможностью вращения посредством приема подачи мощности из аккумулятора 10. Когда ротор принимает вращательную энергию из двигателя 1 и ведущих колес 8, MG 3 может выступать в качестве генератора мощности, который вызывает электродвижущую силу на обоих концах обмотки статора и может заряжать аккумулятор 10.
[0018] Первый масляный насос 4 представляет собой лопастный насос, который работает посредством передачи вращения MG 3 через ремень 4b. Первый масляный насос 4 всасывает гидравлическое масло, накапливаемое в маслосборнике 72 CVT 7, и подает гидравлическое давление в гидравлический регулирующий клапанный узел 71.
[0019] Второй масляный насос 5 представляет собой электрический масляный насос, который работает посредством приема подачи мощности из аккумулятора 10. На основе команды из интегрального контроллера 50 второй масляный насос 5 приводится в действие, когда количество масла является недостаточным только посредством первого масляного насоса 4, и аналогично первому масляному насосу 4, второй масляный насос 5 всасывает масло для гидросистем, накапливаемое в маслосборнике 72 CVT 7, и подает гидравлическое давление в гидравлический регулирующий клапанный узел 71.
[0020] Вторая муфта 6 размещается между MG 3 и CVT 7 и ведущими колесами 8. На основе команды из интегрального контроллера 50, зацепление/расцепление второй муфты управляется посредством гидравлического давления, причем это давление регулируется посредством гидравлического регулирующего клапанного узла 71 посредством использования давления на выходе из первого масляного насоса 4 или второго масляного насоса 5 в качестве исходного давления. В качестве второй муфты 6 используется, например, нормально открытая многодисковая мокрая муфта.
[0021] CVT 7, размещаемая ниже MG 3, имеет возможность изменять передаточное число бесступенчато, согласно скорости транспортного средства, открытию акселератора и т.п. CVT 7 содержит первичный шкив, вторичный шкив и ремень, подвешенный на шкивах. Передаточное число изменяется бесступенчато посредством формирования давления первичного шкива и давления вторичного шкива посредством гидравлического регулирующего клапанного узла 71, посредством использования давления на выходе из первого масляного насоса 4 и второго масляного насоса 5 в качестве исходного давления, перемещения подвижного шкива первичного шкива и подвижного шкива вторичного шкива в осевом направлении посредством использования давления шкива и изменения радиуса контакта ременного шкива.
[0022] Дифференциал 12 соединяется с выходным валом CVT 7 через непроиллюстрированный конечный редукторный механизм, и ведущие колеса 8 соединяются с дифференциалом 12 через ведущие валы 13.
[0023] Сигналы из датчика 51 частоты вращения, который обнаруживает частоту Ne вращения двигателя 1, датчика 52 частоты вращения, который обнаруживает частоту Nin вращения входного вала CVT 7 (=частоте вращения выходного вала второй муфты 6), датчика 53 открытия акселератора, который обнаруживает открытие APO акселератора, переключателя 54 режима движения, который обнаруживает позицию переключения диапазона передач CVT 7 (состояние рычага переключения диапазона передач или переключателя диапазона передач, который переключается между передним ходом, задним ходом, нейтралью и режимом парковки), датчика 55 скорости транспортного средства, который определяет скорость транспортного средства VSP, и т.п., вводятся в интегральный контроллер 50. На основе этих введенных сигналов, интегральный контроллер 50 выполняет различное управление двигателем 1, MG 3 (инвертором 9) и CVT 7.
[0024] В частности, интегральный контроллер 50 вычисляет требуемую движущую силу (движущую силу для реализации ускорения, требуемого водителем) на основе открытия APO акселератора и скорости VSP транспортного средства, и управляет соответствующим крутящим моментом двигателя 1 и MG 3 таким образом, чтобы реализовывать требуемую движущую силу.
[0025] Дополнительно, интегральный контроллер 50 задает перегрузочную способность по крутящему моменту второй муфты 6, допускающей передачу требуемой движущей силы, в качестве целевой перегрузочной способности по крутящему моменту и управляет гидравлическим давлением, которое должно подаваться из гидравлического регулирующего клапанного узла 71 во вторую муфту 6, таким образом, что перегрузочная способность по крутящему моменту второй муфты 6 становится целевой перегрузочной способностью по крутящему моменту.
[0026] Кроме того, интегральный контроллер 50 вычисляет целевое передаточное число на основе открытия APO акселератора и скорости VSP транспортного средства и управляет передаточным числом CVT 7 таким образом, что реализуется целевое передаточное число.
[0027] Дополнительно, интегральный контроллер 50 обращается к карте переключения режима, как проиллюстрировано на фиг.2, и переключается между EV-режимом и HEV-режимом в качестве рабочего режима транспортного средства 100.
[0028] В EV-режиме, первая муфта 2 расцеплена, и транспортное средство 100 движется с использованием только MG 3 в качестве источника приведения в движение. EV-режим выбирается, когда требуемая движущая сила является небольшой, и SOC аккумулятора 10 является достаточным.
[0029] В HEV-режиме, первая муфта 2 зацеплена, и транспортное средство 100 движется с использованием двигателя 1 и MG 3 в качестве источника приведения в движение. HEV-режим выбирается, когда требуемая движущая сила является большой, или SOC аккумулятора 10 является недостаточным.
[0030] Чтобы предотвращать неравномерную работу во время переключения между EV-режимом и HEV-режимом, линия переключения из EV-режима в HEV-режим задается на стороне более высокой скорости транспортного средства и на стороне большего открытия акселератора, по сравнению с линией переключения из HEV-режима в EV-режим.
[0031] Поскольку транспортное средство 100 не содержит преобразователя крутящего момента, интегральный контроллер 50 выполняет управление плавным сцеплением/расцеплением муфты, посредством которого транспортное средство 100 начинает движение и останавливается при одновременном обеспечении принудительного проскальзывания второй муфты 6 в области плавного старта муфты, как проиллюстрировано на фиг.2 (в области низких скоростей транспортного средства, в которой скорость транспортного средства, которая должна использоваться, составляет VSP1 или меньше, во время начала движения или замедления для того, чтобы останавливаться, при этом VSP1 составляет, например, 10 км/ч).
[0032] В частности, когда транспортное средство 100 начинает движение посредством переключения позиции переключения диапазона передач CVT 7 из позиции неподвижности, к примеру, N, P в позицию движения, к примеру, D, R, интегральный контроллер 50 постепенно увеличивает гидравлическое давление, которое должно подаваться во вторую муфту 6, и заставляет вторую муфту 6 проскальзывать и постепенно зацепляться. Когда скорость транспортного средства достигает VSP1, интегральный контроллер 50 заставляет вторую муфту 6 полностью зацепляться и завершает управление плавным сцеплением/расцеплением муфты.
[0033] Когда транспортное средство 100 движется в то время, когда позиция диапазона передач CVT 7 находится в позиции движения, и когда транспортное средство 100 замедляется, и скорость транспортного средства уменьшается до VSP1, интегральный контроллер 50 постепенно уменьшает гидравлическое давление, которое должно подаваться во вторую муфту 6, и заставляет вторую муфту 6 проскальзывать и постепенно расцепляться. Когда транспортное средство 100 останавливается, интегральный контроллер 50 заставляет вторую муфту 6 полностью расцепляться и завершает управление плавным сцеплением/расцеплением муфты.
[0034] Во время управления плавным сцеплением/расцеплением муфты, интегральный контроллер 50 управляет двигателем 1 и MG 3 таким образом, что разность частоты вращения второй муфты 6 становится целевой разностью частоты вращения.
[0035] Когда неисправность при зацеплении (сбой по минимальному давлению) второй муфты 6 возникает в транспортном средстве 100 вследствие недостаточного гидравлического давления, которое должно подаваться во вторую муфту 6, имеется вероятность уменьшения давления в магистрали в качестве источника, и когда давление в магистрали уменьшается, имеется вероятность проскальзывания ремня в CVT 7. По этой причине, когда неисправность при зацеплении второй муфты 6 возникает, необходимо быстро определять неисправность при зацеплении и выполнять надлежащее управление, такое как снижение крутящего момента двигателя 1 и MG 3.
[0036] Тем не менее, во время управления плавным сцеплением/расцеплением муфты, вторая муфта 6 находится в состоянии проскальзывания, как описано выше, и разность частоты вращения возникает во второй муфте 6 во время управления плавным сцеплением/расцеплением муфты, независимо от того, возникает или нет неисправность при зацеплении второй муфты 6. Это затрудняет определение того, возникает или нет неисправность при зацеплении второй муфты, только на основе разности частоты вращения.
[0037] По этой причине, в транспортном средстве 100, определение того, возникает или нет неисправность при зацеплении второй муфты 6, выполняется посредством обработки определения сбоя, как описано ниже.
[0038] Фиг.3 является блок-схемой последовательности операций, иллюстрирующей подробности обработки определения сбоя второй муфты 6, выполняемой посредством интегрального контроллера 50.
[0039] В частности, на этапе S1, интегральный контроллер 50 сначала определяет то, удовлетворяются или нет условия определения сбоя. Определяется то, что условия определения сбоя удовлетворяются, когда позиция переключения диапазона передач CVT 7 находится в позиции движения, к примеру, D и R, открытие акселератора превышает 0, рабочий режим не переключается, позиция переключения диапазона передач не изменяется, и неисправность датчиков и т.п. не обнаруживается. Обработка переходит к этапу S2, когда условия определения сбоя удовлетворяются, в противном случае обработка завершается.
[0040] На этапе S2, интегральный контроллер 50 считывает открытие APO акселератора, скорость VSP транспортного средства, частоту Ne вращения двигателя 1, частоту Nm вращения MG 3 и частоту Nin вращения входного вала CVT 7. Открытие APO акселератора, скорость VSP транспортного средства, частота Ne вращения двигателя 1 и частота Nin вращения входного вала CVT 7 являются значениями, обнаруженными посредством датчиков, и частота Nm вращения MG 3 является значением, вычисленным посредством управляющего сигнала MG 3.
[0041] На этапе S3, интегральный контроллер 50 вычисляет фактический крутящий момент Te двигателя 1 и фактический крутящий момент Tm MG 3. Фактический крутящий момент Te двигателя 1 может вычисляться посредством обращения к карте крутящего момента двигателя 1 на основе открытия APO акселератора и частоты Ne вращения двигателя 1. Фактический крутящий момент MG 3 может вычисляться на основе электрической нагрузки (значения тока) MG 3.
[0042] На этапе S4, интегральный контроллер 50 вычисляет целевую перегрузочную способность Tc по крутящему моменту второй муфты 6. Целевая перегрузочная способность Tc по крутящему моменту представляет собой перегрузочную способность по крутящему моменту второй муфты 6, которая требуется для передачи требуемой движущей силы, вычисляется на основе открытия APO акселератора и скорости VSP транспортного средства и может вычисляться на основе требуемой движущей силы.
[0043] На этапе S5, интегральный контроллер 50 определяет то, может или нет набор оборотов двигателя 1, во время неисправности при зацеплении второй муфты 6, подавляться посредством рекуперации MG 3. То, может или нет набор оборотов двигателя 1 подавляться, зависит от фактического крутящего момента двигателя 1 и рекуперативной способности MG 3, и определяется то, что набор оборотов двигателя 1 может подавляться посредством рекуперации MG 3, когда открытие APO акселератора меньше предварительно определенного открытия APOth, либо когда SOC аккумулятора 10 меньше предварительно определенного значения SOCth.
[0044] Обработка переходит к этапу S6, когда определяется то, что набор оборотов двигателя 1 может подавляться посредством рекуперации MG 3, а когда определяется то, что набор оборотов двигателя 1 не может подавляться, обработка переходит к этапу S10.
[0045] На этапе S6, интегральный контроллер 50 вычисляет абсолютное значение отклонения (в дальнейшем называемое "отклонением крутящего момента") между целевой перегрузочной способностью Tc по крутящему моменту второй муфты 6 и суммой фактического крутящего момента Te двигателя 1 и фактического крутящего момента Tm MG 3 (=фактическому входному крутящему моменту CVT 7) и определяет то, превышает оно или нет первое значение σ1 определения сбоя.
[0046] Когда неисправность при зацеплении возникает во второй муфте 6, выполняется рекуперация посредством MG 3 таким образом, что разность частоты вращения во второй муфте 6 не становится больше целевой разности частоты вращения, и крутящий момент MG 3 становится отрицательным значением, в результате уменьшается чего крутящий момент, введенный из двигателя 1 и MG 3 во вторую муфту 6, и увеличивается отклонение крутящего момента.
[0047] Следовательно, когда отклонение крутящего момента превышает первое значение σ1 определения сбоя, интегральный контроллер 50 определяет то, что имеется вероятность неисправности при зацеплении, которая возникает во второй муфте 6, и обработка переходит к этапу S7. В противном случае, обработка переходит к этапу S14.
[0048] На этапе S7, интегральный контроллер 50 задает флаг определения сбоя равным 1 и инструктирует таймеру определения сбоя увеличивать свое значение. Таймер определения сбоя представляет собой таймер для измерения периода времени, в течение которого отклонение крутящего момента превышает первое значение σ1 определения сбоя.
[0049] На этапе S8, интегральный контроллер 50 определяет то, становится или нет значение таймера определения сбоя больше порогового значения TFAIL определения сбоя. Когда значение таймера определения сбоя превышает пороговое значение TFAIL определения сбоя, обработка переходит к этапу S9, на котором интегральный контроллер 50 определяет то, что неисправность при зацеплении возникает во второй муфте 6. Когда значение таймера определения сбоя не превышает пороговое значение TFAIL определения сбоя, обработка завершается.
[0050] Сразу не определяется, что неисправность при зацеплении возникает во второй муфте 6, когда отклонение крутящего момента становится больше первого значения σ1 определения сбоя, поскольку отклонение крутящего момента становится больше первого значения σ1 определения сбоя временно даже в состоянии, в котором вторая муфта 6 не зацепляется вследствие задержки работы гидравлического регулирующего клапанного узла 71, даже если позиция переключения диапазона передач находится в позиции движения, и интегральный контроллер 50 распознает позицию движения (псевдо-D-состояние), так что необходимо отличать между таким псевдо-D-состоянием и неисправностью при зацеплении второй муфты 6.
[0051] Между тем, на этапе S10, на который переходят из S5, на котором выполняется такое определение, что набор оборотов двигателя 1 не может подавляться посредством рекуперации MG 3, интегральный контроллер 50 вычисляет разность частоты вращения второй муфты 6 на основе частоты Nm вращения MG 3 и частоты Nin вращения входного вала CVT 7 и определяет то, превышает оно или нет второе значение σ2 определения сбоя.
[0052] Когда неисправность при зацеплении возникает во второй муфте 6, выполняется рекуперация посредством MG 3 таким образом, что разность частоты вращения во второй муфте 6 не становится больше целевой разности частоты вращения, как описано выше. Тем не менее, когда набор оборотов двигателя 1 не может подавляться посредством рекуперации MG 3, поскольку открытие APO акселератора является большим, или когда набор оборотов двигателя 1 не может подавляться посредством рекуперации MG 3, поскольку SOC аккумулятора 10, является высоким, и рекуперация посредством MG 3 не может выполняться в достаточной степени, возникает набор оборотов двигателя 1, что затрудняет определение, посредством вышеописанного отклонения крутящего момента, того, возникает или нет неисправность при зацеплении во второй муфте 6.
[0053] Следовательно, в этом случае определение неисправности при зацеплении во второй муфте 6 выполняется на основе разности частоты вращения во второй муфте 6. Обработка переходит к этапу S11, когда разность частоты вращения превышает второе значение σ2 определения сбоя, поскольку имеется вероятность неисправности при зацеплении во второй муфте 6. В противном случае, обработка переходит к этапу S14.
[0054] Обработка по S11-S13 является идентичной обработке по S7-S9, на которых флаг определения сбоя задается равным 1, и таймеру определения сбоя инструктируется увеличивать свое значение. Когда значение таймера определения сбоя становится больше порогового значения TFAIL определения сбоя, выполняется такое определение, что неисправность при зацеплении возникает во второй муфте 6.
[0055] Между тем, когда на этапе S6 определяется то, что отклонение крутящего момента меньше первого значения σ1 определения сбоя, и когда на этапе S10 определяется то, что разность частоты вращения меньше второго значения σ2 определения сбоя, обработка переходит к этапу S14, на котором интегральный контроллер 50 задает флаг определения сбоя равным 0.
[0056] На этапе S15, интегральный контроллер 50 определяет то, удовлетворяются или нет условия определения восстановления. Определяется то, что условия определения восстановления удовлетворяются, когда любое из следующих двух условий удовлетворяется:
- Отклонение крутящего момента<первое значение Δ1 определения восстановления, и разность частоты вращения < второе значение Δ2 определения восстановления;
- Открытие APO акселератора > 0, и разность частоты вращения ≈ 0.
[0057] Когда определяется то, что условия определения восстановления удовлетворяются, обработка переходит к этапу S16, на котором таймеру определения восстановления инструктируется увеличивать свое значение.
[0058] На этапе S17, интегральный контроллер 50 определяет то, становится или нет таймер определения восстановления больше порогового значения TSAFE определения восстановления. Когда определяется то, что таймер определения восстановления превышает пороговое значение TSAFE определения восстановления, обработка переходит к этапу S18, на котором интегральный контроллер 50 сбрасывает таймер определения сбоя и таймер определения восстановления и определяет то, что вторая муфта 6 находится в нормальном состоянии.
[0059] Фиг.4 иллюстрирует случай, в котором определение неисправностей второй муфты 6 выполняется в то время, когда педаль акселератора нажимается, чтобы начинать движение транспортного средства. В этом случае, педаль акселератора нажимается дважды, и при первом нажатии, возникает такая проблема, что гидравлическое давление не подается во вторую муфту 6.
[0060] Следовательно, во времена t11-t12, рекуперация посредством MG 3 выполняется таким образом, чтобы подавлять увеличение разности частоты вращения, и когда крутящий момент MG 3 становится отрицательным, отклонение крутящего момента (отклонение между целевой перегрузочной способностью Tc по крутящему моменту второй муфты 6 и суммой фактического крутящего момента Te двигателя 1 и фактического крутящего момента Tm MG 3) увеличивается, и флаг определения сбоя задается равным 1.
[0061] В течение этого периода, таймеру определения сбоя инструктируется увеличивать свое значение, но в этом случае не определяется то, что неисправность при зацеплении возникает во второй муфте 6, поскольку отклонение крутящего момента уменьшается до того, как значение таймера определения сбоя достигает порогового значения TFAIL определения сбоя, и флаг определения сбоя задается равным 0.
[0062] Во время второго нажатия, гидравлическое давление нормально подается во вторую муфту 6, и управление плавным сцеплением/расцеплением муфты выполняется нормально.
[0063] Поскольку рекуперация посредством MG 3 не выполняется во время управления плавным сцеплением/расцеплением муфты, отклонение крутящего момента меньше первого значения Δ1 определения восстановления, и разность частоты вращения во второй муфте 6 уменьшается по мере того, как продолжается управление плавным сцеплением/расцеплением муфты, таким образом, что она составляет меньше второго значения Δ2 определения восстановления во время t13.
[0064] Когда это состояние продолжается в течение предварительно определенного периода времени (периода времени до тех пор, пока таймер определения восстановления не достигнет порогового значения TSAFE определения восстановления), таймер определения сбоя и таймер определения восстановления сбрасываются (время t14).
[0065] Дополнительно, фиг.5 иллюстрирует случай, в котором определение неисправностей второй муфты 6 выполняется в то время, когда педаль акселератора глубоко нажимается, чтобы начинать движение транспортного средства. В этом случае, педаль акселератора нажимается дважды, и при первом нажатии, возникает такая проблема, что гидравлическое давление не подается во вторую муфту 6.
[0066] Во времена t21-t22, разность частоты вращения во второй муфте 6 увеличивается, и флаге определения сбоя становится равным 1. В течение этого периода, таймеру определения сбоя инструктируется увеличивать свое значение, но в этом случае не определяется то, что неисправность при зацеплении возникает во второй муфте 6, поскольку отклонение крутящего момента уменьшается до того, как значение таймера определения сбоя достигает порогового значения TFAIL определения сбоя, и флаг определения сбоя задается равным 0.
[0067] Во время второго нажатия, гидравлическое давление нормально подается во вторую муфту 6, и управление плавным сцеплением/расцеплением муфты выполняется нормально.
[0068] Поскольку рекуперация посредством MG 3 не выполняется во время управления плавным сцеплением/расцеплением муфты, отклонение крутящего момента меньше первого значения Δ1 определения восстановления, и разность частоты вращения во второй муфте 6 уменьшается по мере того, как продолжается управление плавным сцеплением/расцеплением муфты, таким образом, что она составляет меньше второго значения Δ2 определения восстановления во время t23.
[0069] Когда это состояние продолжается в течение предварительно определенного периода времени (периода времени до тех пор, пока таймер определения восстановления не достигнет порогового значения TSAFE определения восстановления), таймер определения сбоя и таймер определения восстановления сбрасываются (время t24).
[0070] Следовательно, согласно вышеописанной обработке определения сбоя, определение неисправности при зацеплении второй муфты 6 может выполняться на основе отклонения крутящего момента, даже во время управления плавным сцеплением/расцеплением муфты после переключения позиции переключения диапазона передач с позиции неподвижности на позицию движения. Таким образом, определение неисправности при зацеплении второй муфты 6 может выполняться на ранней стадии, и может начинаться надлежащее управление, к примеру, снижение крутящего момента двигателя 1 и MG 3.
[0071] В случае если набор оборотов двигателя 1 вследствие неисправности при зацеплении посредством второй муфты 6 не может подавляться посредством рекуперации MG 3, поскольку степень набора оборотов двигателя 1 является большой вследствие большой величины нажимаемой педали акселератора, достаточная рекуперация не может выполняться вследствие высокого SOC аккумулятора 10 и т.п., определение неисправности при зацеплении второй муфты 6 выполняется на основе разности частоты вращения второй муфты 6. Это позволяет определять неисправность при зацеплении во второй муфте 6, даже когда возникает набор оборотов двигателя 1, и определение неисправности при зацеплении второй муфты 6 посредством вышеописанного отклонения крутящего момента является затруднительным.
[0072] Дополнительно, поскольку определение неисправности при зацеплении второй муфты 6 выполняется, когда накопленное значение периода времени, в течение которого удовлетворяются условия, к которым следует обращаться при определении неисправности при зацеплении второй муфты 6, достигает предварительно определенного значения, можно повышать точность определения неисправностей. В частности, можно предотвращать ошибочное определение случая, в котором вторая муфта 6 временно не зацепляется, к примеру, псевдо D, как того, что возникает неисправность при зацеплении второй муфты 6.
[0073] Кроме того, накопленное значение сбрасывается в ситуациях, когда можно определять то, что вторая муфта 6 находится в нормальном состоянии, к примеру, когда педаль акселератора нажимается, и разность частоты вращения во второй муфте 6 является приблизительно нулевой, и когда во время управления плавным сцеплением/расцеплением муфты отклонение крутящего момента меньше первого значения Δ1 определения восстановления, и разность частоты вращения во второй муфте 6 меньше второго значения Δ2 определения восстановления.
[0074] Таким образом, даже если неисправность при зацеплении второй муфты 6 возникает временно, можно определять то, что вторая муфта 6 находится в нормальном состоянии, когда неисправность при зацеплении восстанавливается после этого. Это позволяет предотвращать выполнение снижения крутящего момента и т.п. двигателя 1 и MG 3 без необходимости.
[0075] Выше пояснен вариант осуществления настоящего изобретения. Тем не менее, вышеописанный вариант осуществления является только частью примеров вариантов применения настоящего изобретения и не имеет намерение ограничивать объем настоящего изобретения конкретной конструкцией вышеописанного варианта осуществления.
[0076] Например, согласно вышеописанному варианту осуществления, транспортное средство 100 содержит CVT 7 в качестве трансмиссии. Тем не менее, вместо CVT 7 могут предоставляться другие типы трансмиссии (ступенчатая AT, тороидальная CVT, MT с 2 педалями и т.п.).
[0077] Настоящая заявка притязает на приоритет заявки на патент (Япония) № 2013-116835, поданной в патентное бюро (Япония) 3 июня 2013 года, содержимое которой полностью содержится в данном документе по ссылке.
Реферат
Изобретение относится к гибридным транспортным средствам. Устройство для определения неисправностей гибридного транспортного средства содержит средство вычисления целевой перегрузочной способности по крутящему моменту; средство вычисления фактического крутящего момента двигателя и электромотора; средство вычисления отклонения крутящего момента между целевой перегрузочной способностью по крутящему моменту и суммой фактического крутящего момента двигателя и фактического крутящего момента электромотора. Средство определения неисправностей определяет возникновение неисправности при зацеплении муфты, когда отклонение крутящего момента становится больше первого значения определения сбоя во время управления плавным сцеплением/расцеплением муфты. Решение позволяет определять неисправность в муфте. 2 н. и 4 з.п. ф-лы, 5 ил.
Комментарии