Способ управления устройством распределения крутящего момента между передней и задней колесными осями транспортного средства - RU2561485C2
Код документа: RU2561485C2
Чертежи

Описание
Настоящее изобретение в целом относится к области управления устройством распределения крутящего момента между передней и задней колесными осями транспортного средства.
В частности, изобретение относится к способу управления устройством распределения крутящего момента между передней и задней колесными осями транспортного средства, при этом устройство распределения содержит:
- электромеханический привод для распределения крутящего момента между осями, при этом привод выполнен с возможностью селективного механического соединения осей и механического разъединения осей;
- электронный блок управления приводом, содержащий память и выполненный с возможностью управления приводом, - при помощи, по меньшей мере, одного сигнала управления приводом, - переходом привода, по меньшей мере, в одну из конфигураций соединения и разъединения;
- средство электрического питания указанного электронного блока управления;
- множество датчиков, выполненных с возможностью передачи в блок управления множества сигналов датчиков, в том числе по меньшей мере, одного сигнала зажигания, характеризующего работу двигателя, и одного сигнала остановки, характеризующего остановку двигателя, и измерений физических параметров, таких как температура окружающего воздуха.
Привод распределения крутящего момента между задней осью и передней осью транспортного средства имеет тенденцию к нагреву во время его использования для передачи крутящего момента на колесные оси и между осями и, в частности, когда меняют распределение крутящего момента между осями при помощи команды изменения конфигурации привода.
Этот нагрев представляет опасность для целостности привода и транспортного средства, а также для безопасности эксплуатации транспортного средства и может привести к ухудшению работы привода.
Задачей настоящего изобретения является создание способа управления устройством распределения крутящего момента между передней и задней колесными осями транспортного средства, позволяющий, с одной стороны, оценивать температуру привода и одновременно ограничить расходы, связанные с этой функцией оценки температуры, и, с другой стороны, минимизировать потребление энергии, связанное с этой функцией оценки температуры.
В этой связи заявленный способ согласно родовому понятию, представленному выше во вступительной части, в основном характеризуется тем, что электронный блок управления выполнен с возможностью:
- выбора активного режима работы, в котором блок управления генерирует указанный, по меньшей мере, один сигнал управления приводом и при помощи, по меньшей мере, некоторых из указанных измерений физических параметров оценивает текущее значение температуры привода; и
- выбора спящего режима, в котором блок управления сохраняет в памяти данные и в котором блок управления не генерирует указанный, по меньшей мере, один сигнал управления приводом и не производит оценку текущего значения температуры привода; при этом потребление электрической энергии электронным блоком управления является большим в активном режиме работы по сравнению со спящим режимом; и
тем, что переход из активного режима работы в спящий режим происходит по команде блока управления:
- только если ток отключен, и
- если текущее оценочное значение температуры привода меньше или равно заданному порогу температуры или если истекло максимальное время.
Привод позволяет распределять крутящий момент на колесные оси в зависимости от потребности работы транспортного средства с двумя ведущими колесами или с четырьмя ведущими колесами, обеспечивая плавное соединение осей, причем именно при этом соединении наблюдают потенциально опасное повышение температуры привода.
Благодаря заявленному способу, блок управления оценивает температуру привода T° act estim, когда это необходимо, то есть в течение периода времени, когда можно использовать привод и пока не убеждаются, что блок управления можно перевести в спящий режим без опасения потенциального риска для привода. В рамках способа в соответствии с изобретением, после того как двигатель останавливают и он больше не создает крутящего момента, который может приводить к нагреву привода, электронный блок продолжает оценивать изменение температуры привода до момента, когда блок управления можно перевести в его спящий режим.
Таким образом, благодаря заявленному способу, переход блока управления из активного режима работы в спящий режим осуществляют, когда считают, что охлаждение привода является достаточным, чтобы не представлять опасности для перегрева привода. Таким образом, сводят к минимуму риск возникновения ситуации перегрева привода во время последующего использования привода после перехода блока управления в спящий режим.
Если перевод электронного блока управления из активного режима работы в спящий режим был произведен при перегретом приводе, может возникнуть ситуация, в которой пользователь транспортного средства может решить снова запустить двигатель (например, после короткой остановки двигателя менее одной минуты) и опять использовать привод, когда он еще является перегретым, в то время как электронный блок управления не может обнаружить этот перегрев. Действительно, оценка температуры привода, необходимая для обнаружения перегрева привода, иногда может занимать длительное время, в частности, когда блок управления выходит из своего спящего режима, во время которого никакой оценки температуры не производилось. Если перегретый привод повторно задействован электронным блоком управления, выходящим из своего спящего режима, в этом случае появляется опасность для привода. Изобретение позволяет уменьшить этот риск за счет того, что сначала убеждаются, что температура привода ниже записанного в памяти температурного порога, прежде чем разрешить переход в спящий режим.
Соблюдение условия текущего значения оценочной температуры привода «T° act estim», меньшего или равного заданному температурному порогу «T° amb estim+Delta Т°», для разрешения перехода в режим ожидания, обязательно предполагает, что в момент последующего использования привода для механического соединения осей между собой, этот привод будет иметь температуру, которая:
- либо будет ниже, чем она была в момент перехода блока управления в спящий режим,
- либо будет выше, чем она была в момент перехода блока управления в спящий режим, но при этом не превышает окружающую температуру вокруг транспортного средства (за все время нахождения в спящем режиме априорно не происходит создания тепла, связанного с передачей приводом крутящего момента, так как двигатель не работает). Единственным источником тепла, которым можно объяснить повышение температуры привода во время спящего режима, является тепло окружающей среды транспортного средства (но при этом данное тепло является недостаточным, чтобы привод оказался перегретым в момент повторного запуска двигателя) или по причине ненормальной эксплуатации (пример, буксировка на двух колесах транспортного средства).
В рамках номинальной эксплуатации температура привода в момент его первого повторного использования для соединения колесных осей (то есть после того, как электронный блок управления вышел из спящего режима) является, таким образом, вполне совместимой с его нормальной работой.
Благодаря заявленному способу, сводится к минимуму риск возникновения ситуации перегрева привода по причине восстановления активного режима работы электронного блока управления после его спящего режима.
Другим преимуществом способа в соответствии с изобретением является то, что его можно применять без использования таймера для продолжения оценки температуры привода во время фазы, когда блок управления находится в спящем режиме. При использовании таймера, в отличие от заявленного способа, можно оценивать изменение во времени температуры привода, что позволяет иметь оценочное значение температуры привода в момент возврата электронного блока управления в активный режим, однако это решение является слишком дорогим.
Таким образом, заявленный способ позволяет переводить электронный блок управления в спящий режим в подходящий момент, чтобы одновременно ограничить потребление энергии этим блоком управления (в спящем режиме потребление является низким) и при этом убеждаться, что привод в достаточной степени охладился, чтобы избежать дополнительного риска перегрева во время его последующего использования.
Для облегчения понимания настоящего изобретения ниже приведены следующие термины и сокращения:
- "Act": привод;
- "Application Shtdwn": приложение выключения электронного блока управления указанным приводом, это приложение содержит совокупность этапов (в данном случае речь идет о функциях: "Functs disbld", Flsfe disbld", "CAN disbld"), применяемых для перевода этого электронного блока управления из его активного режима работы, обозначаемого "Run Mode", в его спящий режим, обозначаемый "Sip Mode", причем этот перевод можно производить через переходный режим, называемый режимом ожидания и обозначаемый "Stby Mode" (соответствует английскому термину "Standby Mode"). Следует отметить, что в данном случае ставится задача минимизировать потребление электрической энергии электронным блоком управления указанным приводом и одновременно ограничить риск перегрева привода, который может произойти, если пользователь решает возобновить движение транспортного средства, когда этот привод еще является горячим;
- "Btry": Средство электрического питания блока управления. В данном случае речь идет о батарее, связанной с электронным блоком управления для обеспечения его работы, даже если выдается сигнал "Ingnt Off (например, сигнал "Ingnt Off выдается, когда пользователь отключает питание при помощи ключа зажигания), то есть когда средства питания привода деактивированы и когда двигатель транспортного средства выключен (батарея позволяет обеспечивать питание привода во всех его режимах работы, включая режим ожидания "Stdby Mode", или во время перехода из активного режима работы "Run Mode" в режим ожидания "Stdby Mode" перед переходом в спящий режим "Sip Mode");
- "CAN": Коммуникационная сеть, связывающая электронный блок управления указанным приводом, по меньшей мере, с одним другим электронным блоком управления другим устройством, таким как устройство управления зажиганием двигателя транспортного средства, или устройство управления торможением транспортного средства, или устройство управления кондиционированием воздуха транспортного средства (CAN соответствует английскому термину "controller area network");
- "disbld"=показывает, что функция не активирована (например, Flsfe disbld=функция Flsfe деактивирована);
- "enbld"=показывает, что функция активирована (соответствует английскому термину "Enabled");
- "EEPROM"=электрически стираемое и программируемое постоянное запоминающее устройство;
- "ETC"=электронный блок управления указанным приводом (соответствует английскому термину "Electronic Torque Controller");
- "ETC Switch"=средство управления, активируемое пользователем, в данном случае речь идет о трехпозиционном приводе, связанном с электронным блоком управления ETC и выполненном с возможностью передачи на этот блок трех типов сигналов, которыми селективно являются первый сигнал намерения пользователя об использовании только двух ведущих колес, второй сигнал намерения пользователя о применении автоматического управления механическим соединением между передней и задней осями транспортного средства (в случае функции автоматического соединения, включаемой при помощи этого сигнала, блок управления будет учитывать данные, характеризующие буксование, по меньшей мере, одного колеса на дорожном покрытии, чтобы принять решение о необходимости соединения осей между собой), третий сигнал намерения пользователя об использовании четырех ведущих колес, то есть, чтобы привод соединил между собой переднюю и заднюю колесные оси транспортного средства, в этом случае электронный блок управления подает команду на привод для соединения осей, если соблюдены предварительно определенные условия, при которых текущая скорость транспортного средства ниже 80 км/ч (это позволяет избегать соединения на скоростях, не требующих соединения, например, для снижения расхода топлива можно исключить соединение при скоростях транспортного средства, превышающих 80 км/ч), и/или оценочная температура привода ниже заранее определенного максимального температурного порога работы (это позволяет избежать опасности перегрева привода);
- "Flsfe": функция «безотказной работы» (соответствует английскому термину "Failesafe") (функция безотказной работы является функцией обнаружения/контроля нормальной работы некоторых элементов устройства распределения, которая в случае сбоя в работе подает команду, например, на запуск аварийных режимов управления устройством распределения);
- "Funct": Функция (эквивалент английского термина "Function");
- "HW": материальные средства (соответствует английскому термину "Hardware"), в случае устройства распределения крутящего момента HW обозначает механические или электромеханические средства системы, такие как привод, или электронный блок управления указанным приводом, или батареи, или средства связи между электронным блоком управления указанным приводом и CAN;
- "Init": Инициализация устройства распределения крутящего момента;
- "Ignt": сигнал активации, то есть сигнал, подаваемый, когда пользователь поворачивает, например, ключ зажигания транспортного средства, при этом сигнал Ignt On показывает, что зажигание включено, и сигнал Ignt Off показывает, что зажигание выключено (Ignt соответствует английскому термину "ignition");
- "Off: - показывает, что функция или событие не обнаружено/не применяется;
- "On": показывает, что функция или событие обнаружено/ применяется;
- "Pwrltch tmr Мах": заранее определенное значение максимального времени применения функции Pwrltch. В данном случае это максимальное время равно 30 минутам. Это значение максимального времени используют для сравнения с текущим значением времени t, отсчитываемого при помощи функции Tmr. Таким образом, если уравнение (t-Tmr)>Pwrltch tmr Max проверяется, значит время, измеренное функцией Tmr, превысило заранее определенное максимальное время Pwrltch tmr Мах применения функции Pwrltch. Как будет показано ниже, если проверяется функция (t-Tmr)>Pwrltch tmr Max, подают команду на переход электронного блока управления в режим ожидания "Stnby" перед выключением устройства, обозначаемым "Sip Mode";
- "RAM": оперативная память (соответствует английскому термину "random access memory");
- "ROM": постоянная память (соответствует английскому термину "read-only memory");
- "Run": показывает, что функция находится в стадии исполнения;
- "Run Mode": электронный блок управления указанным приводом находится своем активном режиме работы;
- "Sip Mode": спящий режим электронного блока управления приводом. В этом режиме электронный блок управления остается неактивным, и его единственной функцией является ожидание сигнала Ignt On (показывающего намерение запуска, выраженное пользователем транспортного средства, или реальный запуск двигателя), за счет чего электронный блок управления потребляет мало или даже совсем не потребляет электрическую энергию своей батареи Btry (Sip соответствует английскому термину "Sleep");
- "Switch": трехпозиционный селектор (соответствует английскому термину switch, обозначающему выключатель);
- "Stby Mode": режим ожидания электронного блока управления приводом, причем этот режим ожидания является переходным режимом во время перехода электронного блока между активным режимом работы "Run Mode" и спящим режимом "Sip Mode". Этот режим ожидания необходим, так как его используют для записи данных, таких как температура воды двигателя, по меньшей мере, в запоминающее устройство EEPROM, и для тестирования запоминающих устройств RAM и ROM устройства распределения крутящего момента перед переходом электронного блока управления приводом в спящий режим Sip Mode;
- "Т° act estim": Оценочная температура привода (это сокращение используют в уравнении "Т° act estim≤(Т° amb estim+Delta Т°)", в котором Т° amb estim является оценочной температурой окружающего воздуха, и Delta Т° является заранее определенным, предпочтительно фиксированным значением, которое предпочтительно выбирают равным 20°С. Если это уравнение "Т° act estim≤(Т° amb estim+Delta Т°)" проверяется, это значит, что оценочная температура привода перешла в значение ниже температурного порога, равного оценочной температуре воздуха, увеличенной на заранее определенное значение Delta. Эта проверка является условием перехода электронного блока управления из его активного режима работы Run Mode в его режим ожидания, обозначаемый "Stdby Mode";
- "Tmr": функция отсчета истекшего времени, в данном случае выражение Tmr=t указывает, что произведен отсчет истекшего времени t при помощи функции отсчета Tmr (Tmr соответствует английскому термину "Timer");
-«Tst»: тест
- «Wke Transit Mode»: переходный режим активации, обеспечивающий переход/изменение режима во время перехода электронного блока управления указанным приводом из его спящего режима в его активный режим работы, обозначаемый «Run Mode ».
Для осуществления способа в соответствии с изобретением можно предусмотреть, чтобы, если по истечении заранее определенного и записанного в памяти срока охлаждения Pwrltch tmr Мах электронный блок управления не проверяет вышеуказанное условие текущего значения оценочной температуры привода Т° act estim, меньшей или равной указанному заданному температурному порогу Т° amb estim+Delta Т°, то электронный блок управления подает команду на свой переход из активного режима работы Run Mode в спящий режим Sip Mode.
Таким образом, указанный блок управления разрешает переход из активного режима работы Run Mode в спящий режим Sip Mode:
- только когда двигатель остановлен, и
- если оценочная температура привода (Т° act estim) меньше или равна указанному заданному температурному порогу (Т° amb estim+Delta Т°) или если заранее определенный и записанный в памяти временной срок охлаждения (Pwrltch tmr Max) истек с момента остановки двигателя, отмеченной электронным блоком управления.
Этот вариант выполнения заявленного способа позволяет учитывать случай, когда электронный блок управления не может правильно оценить значение температуры привода, так как в рамках нормальной эксплуатации транспортного средства, когда двигатель остается выключенным во время заранее определенного временного срока охлаждения, отмечается, что температура привода обязательно должна быть ниже заданного температурного порога (Т° amb estim+Delta Т°). Таким образом, если этот заранее определенный срок охлаждения истек (Pwrltch tmr Мах), электронный блок управления не станет проверять, что оценочная температура привода меньше или равна заранее определенному порогу, и подает команду на свой переход в спящий режим. Этот режим позволяет избегать бесполезного расхода энергии для ненужного продолжения оценки температуры привода.
Для осуществления предыдущего варианта изобретения можно выбрать указанный заранее определенный и записанный в памяти срок охлаждения (Pwrltch tmr Мах) равным 30 минутам.
Срок продолжительностью 30 минут выбирают, так как он позволяет достичь достаточного охлаждения привода, чтобы обеспечить практически незамедлительное возобновление использования привода, поскольку в обычной окружающей среде эксплуатации транспортного средства отмечается, что эта температура привода находится в интервале между окружающей температурой Т° amb транспортного средства и этой окружающей температурой Т° amb estim+Delta Т°, где является фиксированной и заранее определенной температурной разностью. Таким образом, оценочное значение температуры привода в момент перехода блока управления из его спящего режима и его активный режим работы будет обязательно находиться в пределах от окружающей температуры Т° amb estim воздуха, измеренной температурным датчиком, до этой окружающей температуры Т° amb estim, увеличенной на фиксированное значение Delta Т°, причем это значение Delta Т° выбирают в пределах от +10°С до +30°С и предпочтительно равным +20°С.
Из соображений защиты привода предусматривают, чтобы текущее значение оценочной температуры привода в момент перехода блока управления в активный режим работы определять как Т° amb estim+Delta Т° при фиксированном значении Delta Т°, предпочтительно равном +20°С.
Согласно способу в соответствии с изобретением, электронный блок управления осуществляет переход из спящего режима (Sip Mode) в свой активный режим работы (Run Mode) только после получения, по меньшей мере, указанного сигнала активации (Ignt On) и при условии отсутствия сигнала остановки (Ignt Off) между моментом получения сигнала зажигания (Ignt On) и моментом, когда электронный блок управления оказывается в своем активном режиме работы (Run Mode).
В этом варианте выполнения блок управления может быть пассивным в течение всей продолжительности спящего режима и не потреблять энергии, при этом его активация в активный режим работы происходит вследствие получения сигнала активации (Ignt On) от другой системы транспортного средства, такой как система запуска двигателя.
Согласно способу в соответствии с изобретением, можно предусмотреть, чтобы электромеханический привод был выполнен в виде фрикционного сцепления и чтобы предпочтительно это фрикционное сцепление было дисковым сцеплением, и чтобы текущее оценочное значение температуры привода (Т° act estim n) получать при помощи модели, учитывающей:
- первое значение, меняющееся пропорционально скорости вращения, по меньшей мере, одной детали передней оси, выполненной с возможностью приведения во вращение двигателем, когда привод находится в конфигурации механического соединения колесных осей;
- второе значение, отличное от первого переменного значения, причем это второе значение меняется пропорционально скорости вращения, по меньшей мере, одной детали задней оси, выполненной с возможностью приведения во вращение двигателем, когда привод находится в конфигурации механического соединения колесных осей.
Первое переменное значение может быть средним значением скоростей вращения колес передней оси, и второе переменное значение может быть средним значением скоростей вращения колес задней оси. Способ в соответствии с изобретением способствует ограничению этого повышения температуры, не прибегая к обязательному измерению температуры привода при помощи температурного датчика, специально предназначенного для привода.
Для осуществления предыдущего варианта выполнения заявленного способа, можно предусмотреть, чтобы для оценки изменения во времени указанного текущего значения температуры указанного привода (Т° act estim n), кроме указанных первого и второго значений, электронный блок управления учитывал также, по меньшей мере, одно значение, характеризующее окружающую температуру транспортного средства, измеряемую при помощи температурного датчика, такого как датчик температуры воздуха снаружи транспортного средства.
Этот вариант выполнения позволяет определять изменение температуры привода, не устанавливая температурного датчика на этом приводе и ограничиваясь использованием других измерений, отображающих:
- собственный нагрев привода по причине его использования для соединения колесных осей (в данном случае первое и второе значения, характеризующие скорости вращения элементов колесных осей;
- температуру окружающей среды транспортного средства, которая влияет на скорость охлаждения привода.
Для осуществления способа в соответствии с изобретением можно также предусмотреть, чтобы кроме указанного средства электрического питания (Btry) указанного электронного блока управления транспортное средство содержало главную цепь питания, выполненную с возможностью подачи электричества на различные элементы транспортного средства, причем указанная главная цепь питания й указанное средство электрического питания (Btry) выполнены таким образом, чтобы указанное средство электрического питания (Btry) выдавало электричество в том числе, когда главная цепь питания не выдает электричества.
В данном случае главная цепь питания предпочтительно выполнена с возможностью выдавать электричество при наличии сигнала зажигания (Ignt On) и с возможностью не выдавать электричества в течение периода времени между подачей сигнала остановки (Ignt Off) и подачей нового сигнала зажигания (Ignt On). Указанное средство электрического питания (Btry) выполнено также с возможностью подачи энергии на этот блок управления, когда он находится в режиме, отличном от спящего режима (Sip Mode), и предпочтительно также, когда этот блок управления находится в своем спящем режиме (Sip Mode), при этом предпочтительно указанное средство электрического питания (Btry) выполнено с возможностью постоянного питания указанного электронного блока управления (ETC).
Предпочтительно указанный привод содержит реле, связанное с главной цепью питания, чтобы питать привод током с целью изменения его конфигурации, при этом реле также связано с указанным электронным блоком управления, при этом реле выполнено таким образом, чтобы при получении командного сигнала на переход в конфигурацию соединения этот сигнал разрешал прохождение тока от главной цепи питания на обмотки привода для его перехода в конфигурацию соединения, при этом реле дополнительно выполнено таким образом, чтобы при получении сигнала управления переходом в конфигурацию разъединения этот сигнал отключал ток главной цепи питания от обмоток привода для его перехода в конфигурацию разъединения.
Для осуществления способа согласно любому из вышеуказанных вариантов следующее: если электронный блок управления принимает сигнал остановки (Ignt Off), отображающий остановку двигателя, тогда как привод находится в своей конфигурации соединения колесных осей с указанным двигателем, и если в течение заранее определенного времени, истекшего после получения указанного сигнала остановки (Ignt Off), блок управления принимает сигнал активации (Ignt On), отображающий работу двигателя, тогда как электронный блок управления реактивирует указанный привод в этой же конфигурации соединения, электронный блок управления запрещает свой переход из активного режима работы в спящий режим, по меньшей мере, до конца заранее определенного времени, продолжительность которого меньше 5 минут и предпочтительно превышает или равна 1 минуте.
Этот вариант выполнения позволяет:
- с одной стороны, сохранить в памяти конфигурацию соединения в течение заранее определенного времени и вернуться к этой конфигурации соединения в случае повторного запуска двигателя; и
- с другой стороны, временно задержать переход электронного блока управления из его активного режима работы (Run Mode) в его спящий режим (Sip Mode), когда привод находится в конфигурации соединения, что обеспечивает быстрый повторный запуск без изменения соединения колесных осей.
Этот вариант представляет особый интерес в случае, когда двигатель глохнет в ситуации, когда обе колесные оси соединены с двигателем, например, в случае движения транспортного средства на скользкой дороге или по пересеченной местности. В этом случае сохранение в памяти конфигурации соединения и повторный запуск с возобновлением этой конфигурации обеспечивает распределение крутящего момента с сохранением двух соединенных колесных осей, чтобы сохранить распределение тяги на колеса двух осей. Таким образом, в случае быстрого повторного запуска двигателя, то есть до истечения заранее определенного времени, транспортное средство сохранит свои две колесные оси соединенными с двигателем так же, как они были соединены до того, как двигатель заглох. За счет этого транспортное средство не рискует увязнуть в случае остановки двигателя в скользкой зоне, когда оно движется с двумя соединенными колесными осями.
В дополнение к вышеуказанному варианту выполнения можно предусмотреть, чтобы в случае получения электронным блоком управления сигнала остановки (Ignt Off), характеризующего остановку двигателя, он сохранял в памяти текущую конфигурацию указанного привода и возобновлял эту конфигурацию при получении сигнала зажигания (Ignt On), отображающего работу двигателя, до перехода электронного блока управления в спящий режим.
Такой вариант выполнения обеспечивает сохранение текущей конфигурации привода, пока электронный блок управления не перешел в спящий режим, что позволяет повторно запустить двигатель, не меняя конфигурации.
Согласно способу в соответствии с изобретением, если в течение указанного заранее определенного времени, истекшего с момента приема указанного сигнала остановки (Ignt Off), электронный блок управления не получает сигнала зажигания (Ignt On), отображающего работу двигателя, и если электронный блок управления разрешает свой переход в спящий режим, то после получения сигнала зажигания (Ignt On), отображающего работу двигателя, электронный блок управления генерирует командный сигнал управления приводом для перехода или сохранения указанного привода в его конфигурации разъединения.
Этот вариант выполнения позволяет свести к минимуму эксплуатацию транспортного средства с его соединенными двумя колесными осями, так как такая эксплуатация характеризуется наибольшим расходом энергии. Благодаря этому варианту осуществления заявленного способа, использование соединения двух колесных осей с двигателем ограничивают только действительно необходимыми ситуациями (например, ситуациями, когда транспортное средство движется при выборе конфигурации автоматического режима, то есть если пользователь оставил право выбора только электронному блоку управления) или когда пользователь транспортного средства решил принудительно включить этот режим с несколькими соединенными колесными осями.
Изобретение поясняется чертежами, на которых представлено следующее:
фиг.1 - устройство распределения крутящего момента между передней и задней колесными осями транспортного средства, позволяющее применять способ в соответствии с изобретением (передняя и задняя оси транспортного средства не показаны, но показан привод ACT);
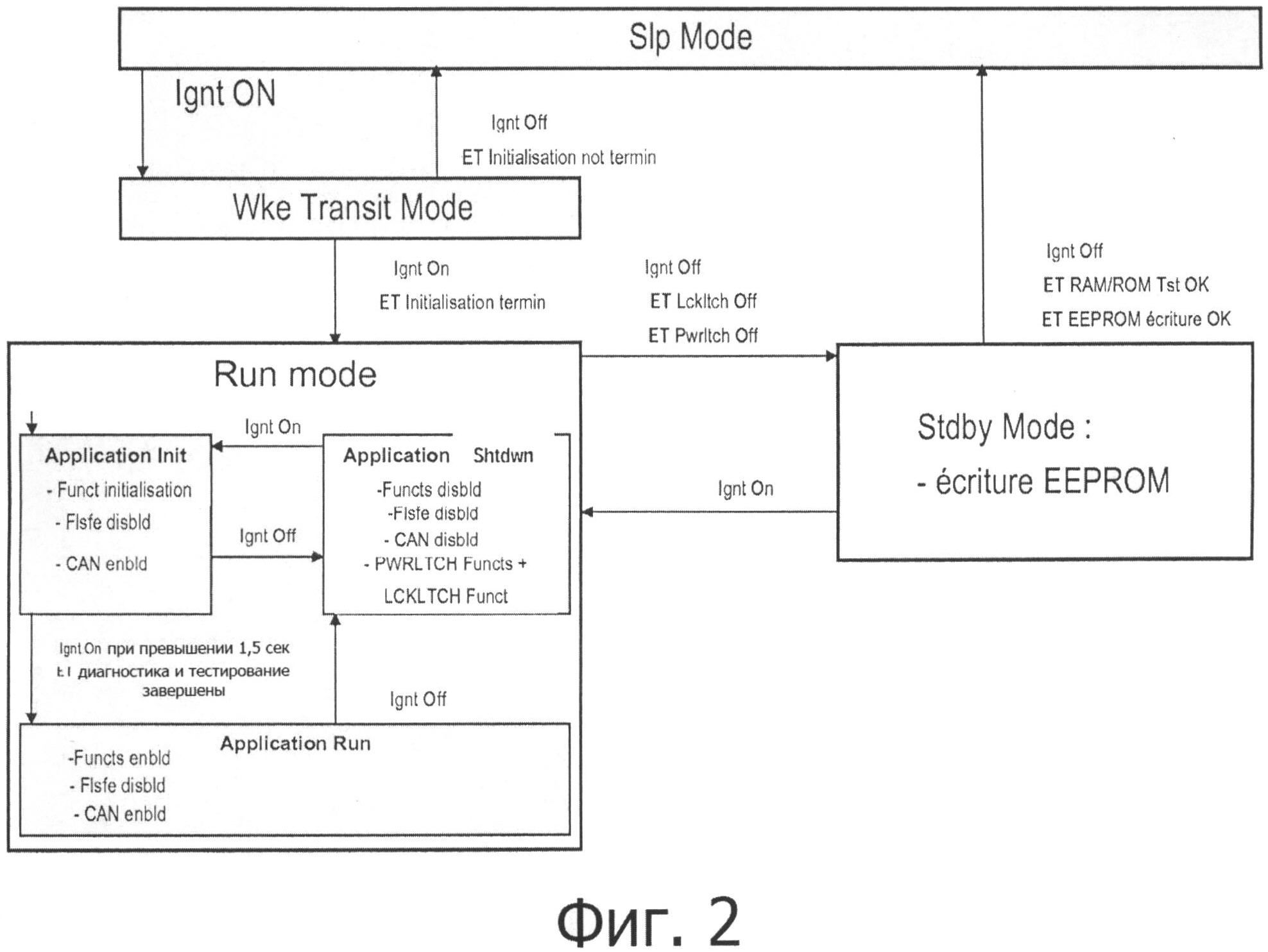
фиг.2 - различные режимы работы электронного блока управления, а также условия, необходимые для изменений режима (в соответствии с заявленным способом), и описание частных приложений и функций, исполняемых блоком управления ETC для каждого из этих режимов;
фиг.3 - детальная схема функции PWRLTCH, которая является функцией, обеспечивающей применение некоторых условий заявленного способа перед переходом блока управления ETC из его активного режима работы Run Mode в его спящий режим Sip Mode.
Как было указано выше, объектом изобретения является способ управления устройством распределения крутящего момента между передней и задней колесными осями транспортного средства.
Как показано на фиг.1, устройство распределения крутящего момента, которое входит в состав транспортного средства, содержит электромеханический привод Act, в данном случае привод содержит дисковое сцепление, при этом выбор положений сцепления происходит электрическим путем в зависимости от сигнала управления приводом, передаваемого электронным блоком управления ETC.
Привод Act позволяет селективно соединять или отсоединять колесные оси транспортного средства относительно двигателя и относительно друг друга в зависимости от необходимости распределять тягу на одну или на несколько колесных осей (привод на два ведущих колеса или на четыре ведущих колеса).
Электронный блок управления ETC связан с несколькими элементами, такими как:
- датчик намерения пользователя "ETC Switch" (описан ниже);
- батарея "Btry", обеспечивающая постоянное питание энергией блока ETC;
- линия соединения, обеспечивающая получение блоком ETC сигнала зажигания Ignt On, характеризующего работу двигателя, и сигнала остановки Ignt Off, характеризующего остановку двигателя или, по крайней мере, намерение пользователя остановить работу двигателя;
- линия соединения, обеспечивающая передачу на приборный щиток транспортного средства данных, связанных с текущим рабочим состоянием устройства соединения, таким как соединение или разъединение колесных осей, или с текущим рабочим режимом блока ETC (режим работы или спящий режим), или с текущим состоянием привода ACT, который может быть перегретым или нет.
Датчик намерения пользователя "ETC Switch"является селектором, выполненным с возможностью переключения между 3 положениями выбора, такими как:
- разъединенное положение, отображающее намерение двигаться только с одной ведущей осью транспортного средства, то есть с двумя ведущими колесами;
- соединенное положение, отображающее намерение двигаться с двумя соединенными осями, то есть в режиме работы транспортного средства с четырьмя ведущими колесами; и
- промежуточное положение, называемое автоматическим, отображающее намерение пользователя дать возможность электронному блоку управления ETC самому автоматически выбирать соединение или разъединение осей в зависимости от режима движения транспортного средства (то есть в зависимости от правил выбора конфигураций соединения и разъединения привода в зависимости от скорости транспортного средства и от разного буксования колес, измеряемого датчиками вращения колес).
Этот селектор имеет устойчивое положение в автоматическом режиме, при этом положение соединения является неустойчивым положением, чтобы деактивировать соединение в ситуациях вождения, когда в нем нет необходимости.
Привод распределения указанного крутящего момента между указанными колесными осями выполнен с возможностью селективного выбора, - в зависимости от сигнала управления, выдаваемого блоком ETC, - конфигурации механического соединения осей и конфигурации механического разъединения осей.
Электронный блок управления указанным приводом содержит одно или несколько запоминающих устройств типа EEPROM, RAM или ROM и выполнен с возможностью управления при помощи, по меньшей мере, одного сигнала управления переходом указанного привода, по меньшей мере, в одну из указанных конфигураций соединения и разъединения и, в случае необходимости, с возможностью выбора промежуточных конфигураций.
Именно электронный блок управления в зависимости от данных, выдаваемых датчиками, и в зависимости, в частности, от положения селектора ETC Switch определяет конфигурацию, которую должен принять привод Act.
Как было указано выше, привод имеет тенденцию к нагреву во время его использования для соединения указанных колесных осей с двигателем.
Для снижения риска использования привода, когда он находится в ситуации перегрева, электронный блок управления ETC оценивает текущее значение, характеризующее температуру "Т° act estim" привода Act. Эту оценку производят при помощи алгоритма, учитывающего разность скорости вращения элементов передней и задней осей и температуру окружающего воздуха Т° amb estim (в данном случае алгоритм учитывает первое и второе значения, которые соответственно пропорциональны вышеуказанным скоростям вращения).
Как показано на фиг.2, в активном режиме работы Run Mode блок управления может работать в приложении Application Run, применяемом во время движения транспортного средства. В этом приложении блок ETC осуществляет функции Functs enbld, которые состоят, в частности, в генерировании указанного, по меньшей мере, одного сигнала управления приводом. Реализация этих функций требует потребления энергии, поступающей от батареи Btry, в частности, для операций вычисления и оценки температуры привода.
Для сокращения этого потребления применяют спящий режим Sip Mode указанного блока управления, в котором он больше не производит оценку температуры привода, не генерирует сигнала управления приводом и в меньшей степени осуществляет или совсем не осуществляет операции вычисления.
Способ в соответствии с изобретением управляет переходами между этими режимами.
Так, чтобы перейти из спящего режима Sip Mode в активный режим работы Run Mode, способ предусматривает прохождение через переходный режим, обозначаемый Wke transit Mode. В этом режиме Wke Transit Mode блок ETC осуществляет только электронное тестирование своих компонентов, таких как запоминающие устройства.
Переход из спящего режима Sip Mode Wke в переходный режим Transit Mode инициируют, когда блок ETC получает сигнал Ignt On включения зажигания. Если во время тестирования в переходном режиме Wke Transit Mode в блок ETC поступает сигнал Ignt Off, он прерывает свою работу в переходном режиме и возвращается в спящий режим Sip Mode.
Если все тесты во время переходного режима Wke Transit Mode были осуществлены правильно во времени, выдается сообщение Initialisation termin, и если по-прежнему присутствует сигнал запуска двигателя Ignt On, блок ETC переходит в активный режим работы Run Mode и, в частности, в приложение Init инициализации активного режима работы Run Mode. В этом приложении блок ETC реализует функции инициализации "Funct initialization", которые, например, состоят в тестировании линии соединения с приводом и работы привода и в тестировании других элементов, таких как селектор ETC Switch и коммуникационная сеть CAN, если речь идет о тестах и диагностике материальных средств HW. В этом приложении функции обнаружения ошибки Flse disbld деактивированы. Функции Else являются функциями позволяющими устройству продолжить работу в аварийном режиме, если отмечаются сбои в работе. В данном случае эти функции Flse деактивированы во время работы приложения init, чтобы избежать отслеживания ошибок, которых в реальности не существует, и чтобы избежать запуска аварийных режимов работы Flse без реальной необходимости.
Если во время работы этого приложения init в блок ETC поступает сигнал Ignt Off, блок ETC переходит в приложение Shtdwn, которое по-прежнему принадлежит к режиму Run. В приложении Shtdwn осуществляют этапы заявленного способа, на которых задерживают переход в спящий режим блок ETC, пока либо не истечет заранее определенное время не более 30 минут, либо пока оценочная температура привода Т° act estim не станет меньше или равной Т° amb estim+Delta Т° (в данном случае Delta Т° тоже равно 20°C). Эти операции временной задержки обозначены PWELTCH functs и подробно описаны со ссылками на фиг.3.
Если же в течение заранее определенного времени, в данном случае менее 1.5 секунды, приложение init работает нормально и если в блок ETC не поступает сигнала Ignt Off во время работы этого приложения init, и если по-прежнему присутствует сигнал Ignt On, блок ETC переходит в приложение Run.
В этом приложении Run функции управления приводом, оценки температуры привода Act и функции Flse активированы, так же, как и связь с сетью CAN. Блок ETC исполняет это приложение Run, пока не получит сигнал Ignt Off. В случае получения сигнала Ignt Off, в то время как блок ETC исполняет приложение Run, блок ETC переходит в приложение Shtdwn, называемое приложением выключения.
Следует учесть, что, когда блок ETC исполняет приложение выключения Shtdwn, он может опять перейти к приложению инициализации init, если в него поступает сигнал Ignt On. В этом случае инициализация возобновляется, и, если сигнал Ign On по-прежнему присутствует, блок ETC возвращается в исполнение приложения Application Run.
Следует отметить, что во время перехода блока ETC в свое приложение Run из своего спящего режима, первое значение оценочной температуры привода Т° act estim должно быть равно Т° amb estim+Delta Т°, где Т° amb estim является температурой воздуха, измеренной температурным датчиком, связанным с блоком ETC (при этом связь может быть прямой без прохождения через сеть CAN), и где Delta Т° равно 20°C.
В дальнейшем, в момент п это оценочное значение температуры привода Т° act estim регулярно определяют, используя вышеуказанный алгоритм, который определяет нагрев привода при помощи разности скоростей вращения колесных осей и при помощи его оценочной температуры в прошедший момент п-1.
Эту оценку изменения температуры привода осуществляют во время исполнения приложения Run, а также приложения Shtdwn, что в случае возврата к приложению init позволяет иметь оценочное значение температуры привода, не прерывая оценки. Таким образом, сводят к минимуму ошибки оценки этой температуры привода.
Во время исполнения приложения Shtdwn блоком ETC он исполняет функцию LCKLTCH Funct, которая заключается в сохранении в памяти текущей конфигурации привода и позволяет убедиться, что в случае возврата блока ETC в приложение run в течение периода, примерно равного 1 минуте, текущая конфигурация привода не изменилась и, в частности, что эта конфигурация является конфигурацией соединения. Как было указано выше, эта функция LCKLTCH Funct охватывает случаи повторного запуска двигателя, после того как он заглох, когда транспортное средство движется с двумя соединенными колесными осями (привод 4*4). По истечении вышеуказанного срока примерно в 1 минуту функция LCKLTCH Funct переходит в состояние деактивации и обозначается LCKLTCH Funct Off.
Функция PWRLTCH Fumets позволяет продолжить оценку текущей температуры привода во время исполнения приложения Shtdwn и отсчитывает время t при помощи счетчика Tmr до достижения заранее определенного и записанного в память срока Pwrltch Мах. На первой стадии, пока оценочная температура привода превышает Т° amb estim+Delta Т° и если поступил сигнал Ignt Off, продолжает действовать сигнал PWRLTCH ON. Если на второй стадии по истечении заранее определенного срока Pwrltch Мах, в данном случае 30 минут, оценочная текущая температура привода остается выше Т° amb estim+Delta Т°, то t-Tmr>Pwrltch Мах, и блок ETC выдает сигнал PWRLTCH Off.
Точно так же, если оценочная температура привода становится меньше или равной Т° amb estim+Delta Т° и присутствует сигнал Ignt On во время исполнения приложения Shtdwn, блок ETC выдает сигнал PWRLTCH Off.
Если одновременно присутствуют Ignt Off, LCKLTCH Off и PWRLTCH Off и блок ETC находится в режиме Run, то блок ETC подает команду на свой переход в промежуточный режим (между режимом Run и режимом Sip Mode). В этом режиме блок ETC проверяет, можно ли считывать и записывать данные в запоминающие устройства EEPROM и записывает в них данные, такие как температура воды системы охлаждения транспортного средства. После сохранения этих данных в памяти EEPROM блок ETC переходит в режим Sip, который мало потребляет или совсем не потребляет энергию.
Если в режиме Stdby блок ETC получает сигнал Ignt On, он возвращается в свой режим Run и исполняет приложение Init, и если сигнал Ignt On все еще присутствует во время приложения Init, блок ETC возвращается в свое приложение Run.
Электронный блок управления проверяет условие выключенного двигателя, по меньшей мере, при помощи некоторых сигналов от указанных некоторых датчиков.
В данном случае электронный блок управления считает, что условие выключенного двигателя соблюдено, как только он принимает сигнал остановки (Ignt Off) и не получает сигнала aKTHBauHH(Ignt On).
Когда текущая оценочная температура привода Act становится ниже заданного температурного порога, Т° amb estim+Delta Т°, считается, что электронный блок управления может перейти в спящий режим и, следовательно, прекратить операцию оценки изменения текущей температуры, потребляя мало или не потребляя энергии, без риска для последующей нормальной работы привода.
Действительно, без такой функции, которая позволяет убедиться в нормальном охлаждении привода перед разрешением на переход в спящий режим Sip Mode, может возникнуть опасность перегрева привода во время его следующего использования. Этот риск существует, когда привод используют для механического соединения передней и задней колесных осей транспортного средства, тогда как он уже перегрет, или, если электронный блок управления перевели в спящий режим Sip Mode, предварительно не убедившись, что температура привода Т° act estim является достаточно низкой (в данном случае меньшей или равной заданному температурному порогу Т° amb estim+Delta Т°), появляется риск перегрева в случае нового использования до того, как привод достаточно охладился.
Реферат
Изобретение относится к управлению распределением крутящего момента между осями автомобиля. Способ управления устройством распределения крутящего момента между передней и задней колесными осями транспортного средства, при этом указанное устройство распределения содержит электромеханический привод для распределения крутящего момента между указанными осями; электронный блок управления указанным приводом; питание блока управления; датчики сигналов зажигания и остановки двигателя, а также температуры окружающего воздуха. Электронный блок управления выбирает активный режим работы и спящий режим. Переход из активного режима работы в спящий режим осуществляется по команде блока управления, если двигатель остановлен и если текущее оценочное значение температуры привода меньше или равно заданному порогу температуры. Расширяются функциональные возможности устройства. 8 з.п. ф-лы, 3 ил.
Формула
- электромеханический привод для распределения крутящего момента между указанными осями, при этом привод выполнен с возможностью селективного механического соединения осей и механического разъединения осей;
- электронный блок управления указанным приводом, содержащий память и выполненный с возможностью управления приводом, при помощи, по меньшей мере, одного сигнала управления приводом, переходом указанного привода, по меньшей мере, в одно из указанных положений соединения и разъединения;
- средство электрического питания электронного блока управления;
- множество датчиков, выполненных с возможностью передачи в блок управления множества сигналов датчиков, в том числе, по меньшей мере, одного сигнала зажигания (Ignt On), характеризующего работу двигателя, и одного сигнала остановки (Ignt Off), характеризующего остановку двигателя, и измерений физических параметров, таких как температура окружающего воздуха,
отличающийся тем, что электронный блок управления выполнен с возможностью:
- выбора активного режима работы (Run Mode), в котором блок управления генерирует, по меньшей мере, один сигнал управления приводом и при помощи, по меньшей мере, множества из указанных измерений физических параметров оценивает текущее значение температуры привода (Т° act estim); и
- выбора спящего режима (Slp Mode), в котором блок управления сохраняет в памяти данные и в котором блок управления не генерирует, по меньшей мере, один сигнал управления приводом и не производит оценку текущего значения температуры привода (Т° act estim); при этом потребление электрической энергии электронным блоком управления является большим в активном режиме работы (Run Mode) по сравнению со спящим режимом (Slp Mode);
причем переход из активного режима работы (Run Mode) в спящий режим (Slp Mode) осуществляется по команде блока управления:
- если двигатель остановлен, и
- если текущее оценочное значение температуры привода (Т° act estim) меньше или равно заданному порогу температуры (Т° amb estim + Delta Т°).
- первое значение, меняющееся пропорционально скорости вращения, по меньшей мере, одной детали передней оси, выполненной с возможностью приведения во вращение двигателем, при этом посредством привода механически соединяют колесные оси;
- второе значение, отличное от первого переменного значения, причем второе значение меняется пропорционально скорости вращения, по меньшей мере, одной детали задней оси, выполненной с возможностью приведения во вращение двигателем, при этом посредством привода механически соединяют колесные оси.
Комментарии