Устройство для обеспечения навигации и посадки корабельных летательных аппаратов - RU190804U1
Код документа: RU190804U1
Чертежи
Описание
Полезная модель относится к радиотехнике и предназначена для обеспечения управления полетом корабельных летательных аппаратов (ЛА), оснащенных соответствующим оборудованием, полетом по маршруту, вывода летательного аппарата в зону действия посадочных средств корабля, обеспечения посадки корабельного летательного аппарата по сигналам управления, передаваемыми по радиоканалу, формируемыми посадочными средствами корабля.
Решение задачи управления полетом ЛА на всех этапах полета, требует достоверного непрерывного определения, как на борту, так и на земле, местоположения ЛА относительно корабля и других объектов при осуществлении навигации, и посадочной площадки при выполнении посадки. Информационное обеспечение о местоположении ЛА осуществляется устройством навигации и посадки, состоящим из бортового оборудования, размещаемого на летательном аппарате, и наземного (корабельного) оборудования, размещаемого на земле (корабле).
Известен бортовой радиотехнический комплекс навигации и посадки летательных аппаратов (ЛА) морского базирования по патенту №120077, опубликованному 10.09.2012, предназначенный для управления полетом ЛА на всех этапах полета, включающий корабельное оборудование и оборудование ЛА, Устройство комплекса по патенту №120077, расположенное на земле (корабле), является наиболее близким аналогом заявленного устройства для обеспечения навигации и посадки корабельных летательных аппаратов.
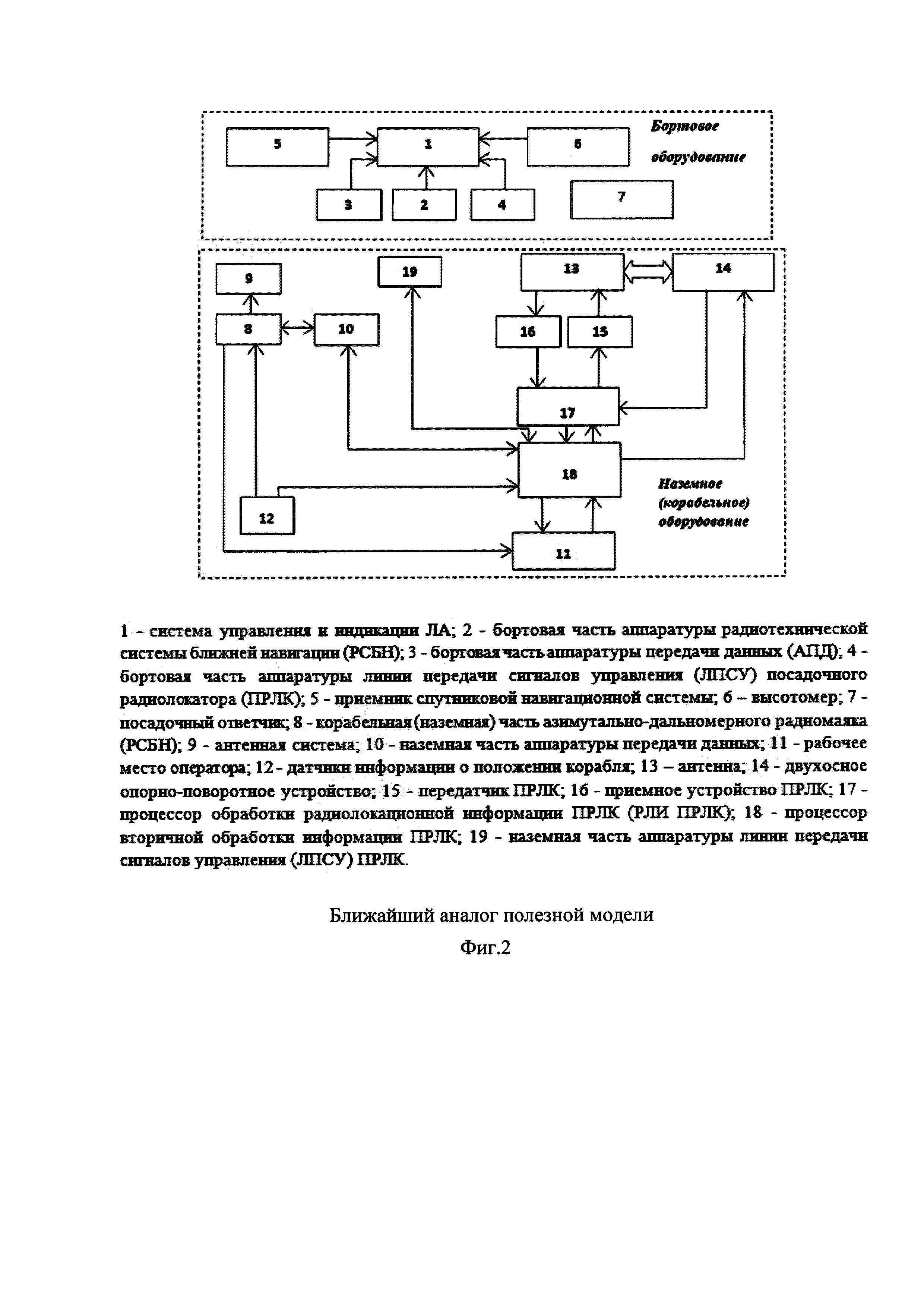
На фиг.2 представлена структурная схема аналога полезной модели - устройства, обеспечивающего получение информации для управления навигацией и посадкой ЛА.
В оборудование ЛА входит система управления и индикации ЛА 1, бортовая часть аппаратуры радиотехнической системы ближней навигации (РСБН) 2, бортовая часть аппаратуры передачи данных (АПД) 3, бортовая часть аппаратуры линии передачи сигналов управления (ЛПСУ) посадочного радиолокатора (ПРЛК) 4, приемник спутниковой навигационной системы 5, высотомер 6, посадочный ответчик 7.
В корабельное оборудование устройства входит корабельная (наземная) часть азимутально–дальномерного радиомаяка 8 (РСБН) с антенной системой 9 в виде фазированной антенной решетки или вращающейся антенной решетки, соединенный с наземной частью аппаратуры передачи данных 10, рабочим местом оператора 11 и датчиками информации о положении корабля 12, трехкоординатный посадочный следящий радиолокатор (ПРЛК), состоящий из антенны 13, установленной на двухосном опорно-поворотном устройстве 14. Антенна 13 соединена с передатчиком ПРЛК 15 и приемным устройством ПРЛК 16. Приемное устройство 16 и передатчик ПРЛК 15 соединены с процессором обработки радиолокационной информации ПРЛК (РЛИ ПРЛК) 17, соединенным с опорно-поворотным устройством 14 и процессором вторичной обработки информации ПРЛК 18, соединенным с двухосным опорно-поворотным устройством 14, рабочим местом оператора 11, наземной части аппаратуры линии передачи сигналов управления (ЛПСУ) ПРЛК 19 и датчиками навигационной информации 12. При навигации ЛА бортовая часть аппаратуры РСБН 2 по сигналам, излучаемым через антенную систему 9 корабельной (наземной) части РСБН, азимутально–дальномерным радиомаяком 8, измеряет азимут и дальность до места расположения радиомаяка. Для решения задач по навигации ЛА во взаимодействии с кораблем, с корабля на борт по радиоканалу аппаратуры передачи данных 3, 10 передается информация о местоположении и параметрах движения корабля, формируемая датчиками навигационной информации 12. Полученная информация о положении ЛА относительно корабля и местоположении корабля передается в систему управления и индикации ЛА 1 и совместно с информацией, получаемой от приёмника спутниковой навигационной системы 5, высотомера 6 используется для управления полетом. Для контроля положения ЛА и управления ЛА с земли (корабля) бортовая аппаратура радиотехнической системы ближней навигации 2 обеспечивает передачу сигналов опознавания, которые принимаются азимутально–дальномерным радиомаяком 8 и положение ЛА отображается на индикаторе рабочего места оператора 11. При посадке ЛА, по команде с рабочего места оператора 11 в процессоре вторичной обработки информации ПРЛК 18 производится выбор траектории посадки ЛА и выбирается область пространства, в которой будет производиться ожидание появления ЛА. По сигналам процессора вторичной обработки информации ПРЛК 18, опорно-поворотное устройство 14 устанавливает антенну 13 таким образом, чтобы направление максимума диаграммы направленности антенны 13, совпадало с направлением посадки и перемещает ее по заданной области пространства, в котором может находиться ЛА. Информация о положении антенны по азимуту и углу места, передается с опорно-поворотного устройства 14 на процессор обработки РЛИ ПРЛК 17. Передатчик ПРЛК 15 формирует запросные сигналы, которые излучаются антенной 13. При наличии ЛА в луче ДН антенны, посадочный ответчик 7 производит излучение ответных сигналов, которые принимаются приемным устройством 16 и поступают на процессор обработки РЛИ ПРЛК 17. В процессоре обработки РЛИ ПРЛК 17 измеряются координаты ЛА относительно антенны, которые передаются в процессор вторичной обработки информации ПРЛК 18, решающий задачу измерения координат ЛА с учетом навигационной информации, поступающей от датчиков 12 и слежения за положением максимума диаграммы направленности антенны 13, управляя азимутальным и угломестным двигателями опорно-поворотного устройства 14, определения отклонения измеренных координат от заданных координат траектории посадки и формирования сигналов пропорциональных отклонению ЛА от посадочной траектории, которые передаются по радиоканалу линии передачи сигналов управления 19. Сигналы управления принимаются бортовой частью аппаратуры ЛПСУ ПРЛК 4 и передаются систему управления и индикации ЛА 1. Посадка ЛА контролируется на рабочем месте оператора 11. Обычно посадочный следящий радиолокатор работает в миллиметровом диапазоне волн, для того чтобы обеспечить необходимую погрешность измерения угловых координат диаграмма направленности антенны, имеет малый угловой размер (менее градуса), поэтому наведение оператором антенны ПРЛК на ЛА, является сложной задачей и может происходить длительное время. В большинстве случаев бортовое оборудование РСБН при переходе в посадочный режим отключается, поэтому решение задачи получения информации о положении ЛА от ПРЛК должно осуществляться в минимальное время, чтобы обеспечить целостность (непрерывность) управления полетом. Кроме этого, затрудняется переход к решению задачи посадки при сложных траекториях посадки. Это приводит к тому, что нарушается целостность решения задачи по обеспечению посадки ЛА на корабль.
Технической проблемой, решаемой полезной моделью, является создание устройства навигации и посадки корабельных летательных аппаратов, обеспечивающего целостность (непрерывность) управления при переходе от навигации летательных аппаратов к посадке и при посадке и обеспечивающего переход к решению задачи посадки при любых траекториях посадки.
Технический результат полезной модели состоит в обеспечении целостности управления полетом летательных аппаратов. Обеспечение целостности (непрерывности) управления полетом летательных аппаратов является следствием минимизации времени перехода от режима навигации к режиму посадки. Дополнительным техническим результатом является обеспечение перехода к решению задачи посадки при любых траекториях посадки, что является следствием автоматического выбора области пространства для ориентирования антенны следящего посадочного радиолокатора.
Для достижения технического результата в устройстве для обеспечения навигации и посадки корабельных летательных аппаратов, содержащем корабельную (наземную) часть азимутально-дальномерного радиомаяка АДРМ (8) с антенной системой (9), соединенного с наземной частью аппаратуры передачи данных (АПД) (10), рабочим местом оператора (11) и датчиками навигационной информации (12), трехкоординатный посадочный следящий радиолокатор, состоящий из антенны (13), установленной на двухосном опорно-поворотном устройстве (14), антенна (13) соединена с передатчиком ПРЛК (15), приемным устройством ПРЛК (16), которые соединены с процессором обработки радиолокационной информации ПРЛК (17), соединенным с опорно-поворотным устройством (14) и процессором вторичной обработки информации ПРЛК (18), соединенным с опорно-поворотным устройством (14), рабочим местом оператора (11), наземной аппаратурой линии передачи сигналов управления (ЛПСУ) ПРЛК (19) и датчиками навигационной информации (12), при этом АПД (10) выполнена с возможностью передачи по радиоканалу в бортовую часть АПД (3) летательного аппарата данных о местоположении и параметрах движения корабля, а также наземная часть ЛПСУ ПРЛК (19) выполнена с возможностью передачи сигналов управления по радиоканалу в бортовую часть аппаратуры ЛПСУ ПРЛК (4), которые используются бортовой системой управления и индикации ЛА (1) совместно с информацией, получаемой от приемника спутниковой навигационной системы ЛА (5), высотомера (6) для управления полетом согласно полезной модели выход канала опознавания азимутально-дальномерного радиомаяка (8) соединен со входом процессора вторичной обработки информации посадочного следящего радиолокатора (18).
Соединение выхода канала опознавания азимутально-дальномерного радиомаяка с процессором вторичной обработки информации посадочного следящего радиолокатора позволяют минимизировать время перехода от режима навигации к режиму посадки, тем самым обеспечить целостность (непрерывность) управления при переходе от навигации летательных аппаратов к посадке и при посадке. Данная связь также позволяет автоматизировать процесс перехода в посадочный режим и навести антенну 13 на зону пространства, в которой находится ЛА, тем самым обеспечить переход к решению задачи посадки при любых траекториях посадки и целостность решения задачи управления ЛА при посадке ЛА на корабль.
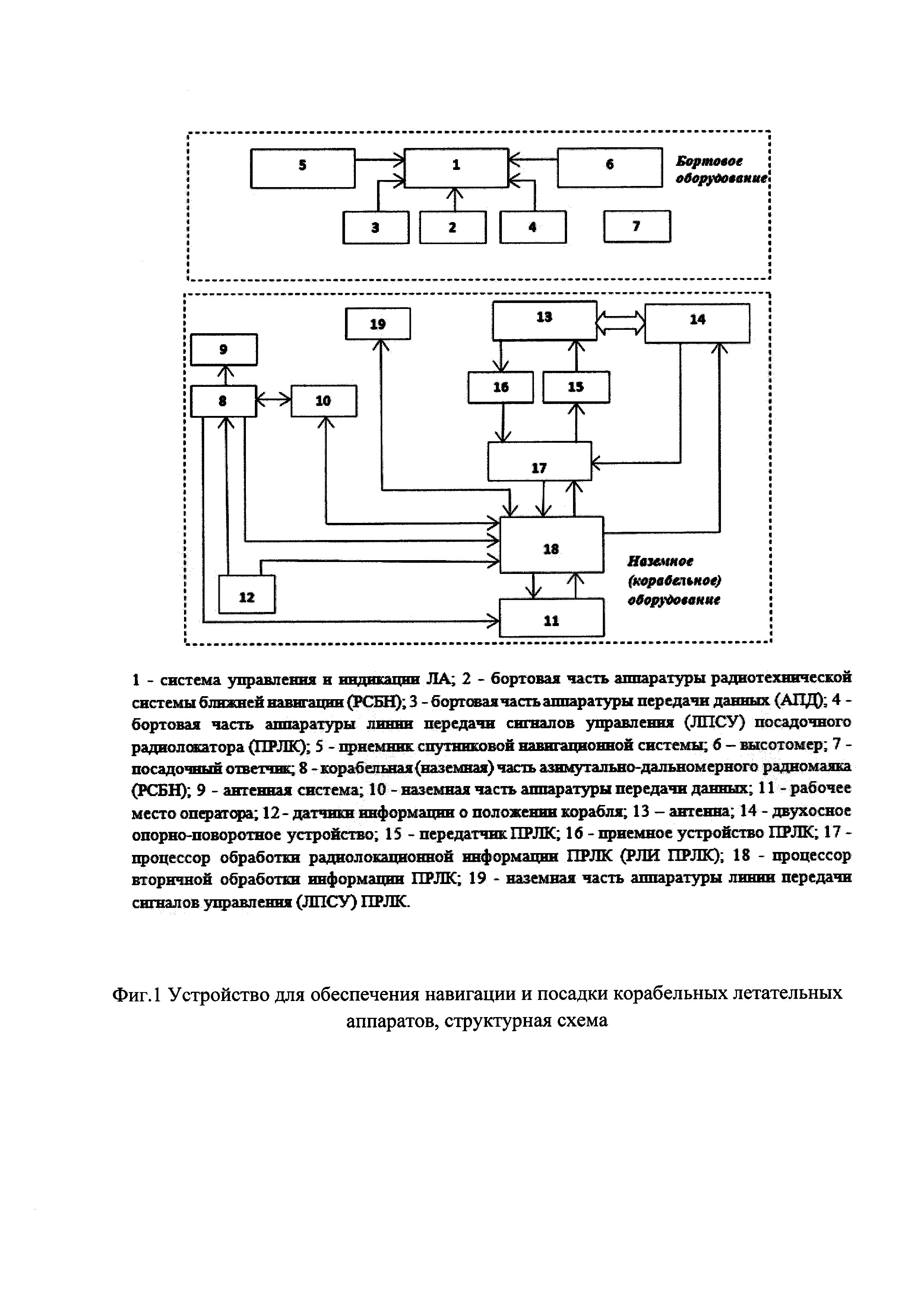
На фиг.1 представлена структурная схема полезной модели - устройства навигации и посадки корабельных летательных аппаратов, реализующего указанные возможности. Техническое решение касается только устройства навигации и посадки корабельных летательных аппаратов, которое расположено на земле (корабле). Описание бортового оборудования показано с целью создания представления о работе устройства в целом. Рассматриваемое устройство состоит из нескольких блоков, соединенных между собой сборочными операциями, в том числе проводной связью, обеспечивающими конструктивное единство и реализацию устройством общего функционального назначения, а именно обеспечения управления полетом корабельных летательных аппаратов.
В бортовое оборудование ЛА входит система управления и индикации ЛА 1, бортовая часть радиотехнической системы ближней навигации (РСБН) 2, бортовая часть аппаратуры передачи данных (АПД) 3, бортовая часть аппаратуры линии передачи сигналов управления (ЛПСУ) 4 посадочного следящего радиолокатора (ПРЛК), приёмник спутниковой навигационной системы 5, высотомер 6, посадочный ответчик 7.
Устройство для обеспечения навигации и посадки ЛА, расположенное на корабле, содержит корабельную (наземную) часть азимутально-дальномерного радиомаяка (АДРМ) 8 (радиотехническая система ближней навигации) с антенной системой 9 в виде фазированной антенной решетки или вращающейся антенной решетки. Радиомаяк 8 соединен с аппаратурой передачи данных 10, рабочим местом оператора 11 и датчиками навигационной информации 12.
Устройство для обеспечения навигации и посадки ЛА содержит трехкоординатный посадочный следящий радиолокатор (ПРЛК), состоящий из антенны 13, установленной на двухосном опорно-поворотном устройстве 14, при этом антенна 13 соединена с передатчиком ПРЛК 15, приемным устройством ПРЛК 16, которые соединены с процессором обработки радиолокационной информации ПРЛК (РЛИ ПРЛК) 17. Процессор обработки радиолокационной информации ПРЛК (РЛИ ПРЛК) 17 соединен с опорно-поворотным устройством 14 и процессором вторичной обработки информации ПРЛК 18. Процессор вторичной обработки информации ПРЛК 18 соединен с двухосным опорно-поворотным устройством 14, азимутально-дальномерным радиомаяком 8, рабочим местом оператора 11, наземной аппаратурой линии передачи сигналов управления (ЛПСУ) ПРЛК 19 и датчиками навигационной информации 12. Выход канала опознавания азимутально-дальномерного радиомаяка 8 соединен со входом процессора вторичной обработки информации ПРЛК 18.
Устройство работает следующим образом.
На этапе полета ЛА в зоне действия азимутально-дальномерного радиомаяка 8 с антенной системой 9 в виде фазированной антенной решетки или вращающейся антенной решетки, управление полетом производится по информации, получаемой на борту о положении ЛА: относительно радиомаяка по сигналам АДРМ бортовой аппаратурой РСБН 2, о местоположении корабля - по каналу аппаратуры передачи данных состоящей из бортовой части 3 и наземной части 10, информации о местоположении ЛА. Для контроля положения ЛА и управления ЛА с земли (корабля) бортовая часть аппаратуры радиотехнической системы ближней навигации 2 обеспечивает передачу сигналов опознавания, которые принимаются азимутально-дальномерным радиомаяком 8. Получаемая информация позволяет определять с необходимой точностью местоположение ЛА в пространстве и взаимное расположение корабля и ЛА и производить управление ЛА, контроль за полетом и вывод ЛА в зону действия посадочного радиолокатора. Для обеспечения целостности (непрерывности) управления полетом на этапе перехода ЛА на траекторию посадки и движения по посадочной траектории необходимо минимизировать время перехода от режима навигации к режиму посадки. Для этого введена связь между выходом канала опознавания азимутально-дальномерного радиомаяка 8 и входом процессора вторичной обработки информации ПРЛК 18. Данное соединение также позволяет автоматизировать процесс перехода в посадочный режим и навести антенну 13 на зону пространства, в которой находится ЛА, тем самым обеспечить переход к решению задачи посадки при любых траекториях посадки и целостность решения задачи управления ЛА при посадке ЛА на корабль.
Таким образом, устройство для обеспечения навигации и посадки корабельных ЛА за счет соединения выхода канала опознавания азимутально-дальномерного радиомаяка 8 с входом процессора обработки информации следящего посадочного радиолокатора 18 для выбора области пространства для ориентирования антенны следящего посадочного радиолокатора, позволяет обеспечить сохранение целостности управления, надежное измерение координат ЛА на всех этапах полета, в том числе и при нахождении на посадочной траектории в любых метеоусловиях, и при любых траекториях посадки.
Реферат
Полезная модель относится к радиотехнике и предназначена для обеспечения управления полетом корабельных летательных аппаратов (ЛА), оснащенных соответствующим оборудованием на всех этапах полета ЛА, полетом по маршруту, вывода летательного аппарата в зону действия посадочных средств корабля, обеспечения посадки корабельного летательного аппарата по сигналам управления, передаваемыми по радиоканалу, формируемыми посадочными средствами корабля. Технический результат состоит в повышении целостности управления полетом ЛА. Для достижения технического результата устройство для обеспечения навигации и посадки корабельных летательных аппаратов состоит из блоков: азимутально-дальномерного радиомаяка с антенной, аппаратуры передачи данных, посадочного следящего радиолокатора, процессора вторичной обработки посадочного следящего радиолокатора, при этом выход канала опознавания азимутально-дальномерного радиомаяка соединен со входом процессора вторичной обработки посадочного следящего радиолокатора.
Комментарии