Способ и устройство корректировки физического коэффициента трения скольжения сцепления - RU2742402C1
Код документа: RU2742402C1
Чертежи


Описание
Притязание по данной заявке было передано в Патентное бюро КНР 31 января 2018 года, номер заявки 201810096667.4, заявлено право приоритета на патент КНР на изобретение под названием «Способ и устройство корректировки физического коэффициента трения скольжения сцепления», его содержание в полном объеме в виде ссылки включено в данную заявку.
Область техники
Настоящее изобретение относится к технической области управления транспортными средствами, в частности относится к способу и устройству корректировки физического коэффициента трения скольжения сцепления.
Предыдущий уровень техники
По мере непрерывного развития автомобильной отрасли в автомобилях постепенно начинает использоваться передача крутящего момента двигателя с помощью мокрого двойного сцепления. В процессе мокрого двойного сцепления может происходить износ в результате трения, что вызывает изменение физического коэффициента трения скольжения сцепления. Поэтому возникает необходимость корректировки физического коэффициента трения скольжения сцепления.
В соответствующих технологиях автомобиль может вычислить физический коэффициент трения скольжения по крутящему моменту двигателя и давлению сцепления, при этом он может подряд получать в результате вычисления несколько коэффициентов, затем вычислять средний коэффициент трения скольжения, после чего данный средний коэффициент корректируется в соответствии с температурой масла коробки передач, давлением сцепления и частотой проскальзывания сцепления и получается откорректированный физический коэффициент трения скольжения.
Однако, процесс корректировки вышеупомянутого коэффициента трения скольжения направлен только на фазу трения микроскольжения, когда диапазон разности скоростей вращения достаточно мал (например, во время плавного движения автомобиля), и совершенно не позволяет корректировать физический коэффициент трения скольжения в условиях значительного скольжения (например, когда автомобиль трогается с места или во время переключения передач), в результате чего возникает проблема неполной корректировки физического коэффициента трения скольжения.
Сущность изобретения
С учетом вышеизложенного цель осуществления настоящего изобретения заключается в том, чтобы предоставить способ корректировки физического коэффициента трения скольжения сцепления для решения проблемы неполной корректировки коэффициента трения скольжения, вызванной тем, что корректировка физического коэффициента трения скольжения происходит только на определенной стадии.
Для достижения вышеупомянутой цели предлагается следующая реализация технического решения по настоящему изобретению:
Способ корректировки физического коэффициента трения скольжения, при котором вышеупомянутый способ корректировки физического коэффициента трения скольжения включает:
получение разности крутящих моментов в соответствии с позиционным соотношением двигателя и сцепления;
получение корректировочного весового показателя, соответствующего крутящему моменту двигателя, в соответствии с разностью крутящих моментов;
корректировка физического коэффициента трения скольжения в соответствии с упомянутым корректировочным весовым показателем и состоянием обкатки.
При этом получение разности крутящих моментов в соответствии с упомянутым позиционным соотношением двигателя и сцепления включает:
получение переменной величины угла между двигателем и входом сцепления;
получение упомянутой разности крутящих моментов путем вычисления в соответствии с крутящим моментом двигателя, крутящим моментом сцепления перед тем, как автомобиль тронется, и крутящим моментом сцепления перед тем, как сцепление принимает крутящий момент, в случае, когда упомянутая переменная величина меньше предварительно установленного порогового значения;
вычисление и получение упомянутой разности крутящих моментов в соответствии с моментом инерции конца вала двигателя и угловым ускорением в случае, когда упомянутая переменная величина больше или равна предварительно установленному пороговому значению.
При этом получение корректировочного весового показателя, соответствующего крутящему моменту двигателя, в соответствии с упомянутой разностью крутящих моментов включает:
определение диапазона крутящего момента, соответствующего упомянутому крутящему моменту двигателя;
выбор из корректировочных весовых показателей, соответствующих упомянутому диапазону крутящего момента (существует по крайней мере один корректировочный весовой показатель), такого корректировочного весового показателя, который будет соответствовать упомянутой разности крутящих моментов.
При этом корректировка физического коэффициента трения скольжения в соответствии с упомянутым корректировочным весовым показателем и состоянием обкатки сцепления включает:
корректировку упомянутого состояния обкатки сцепления в соответствии с упомянутым корректировочным весовым показателем и получение откорректированного состояния обкатки;
в соответствии с откорректированным состоянием обкатки осуществление интерполяции между коэффициентом трения скольжения нового сцепления и коэффициентом трения скольжения обкатанного сцепления, в результате чего получается откорректированный коэффициент трения скольжения.
При этом способ корректировки упомянутого физического коэффициента трения скольжения сцепления, осуществляющийся перед получением разности крутящих моментов в соответствии с упомянутым позиционным соотношением двигателя и сцепления, также включает:
оценку того, отвечает ли автомобиль предварительным условиям в соответствии с параметрами состояния автомобиля;
получение времени поддержания состояния при удовлетворении автомобилем упомянутых предварительных условий;
получение разности крутящих моментов в соответствии с упомянутым позиционным соотношением двигателя и сцепления, включая следующее:
получение разности крутящих моментов в соответствии с упомянутым позиционным соотношением двигателя и сцепления, когда упомянутое время поддержания состояния не меньше предварительно установленного значения.
По сравнению с существующей техникой способ корректировки коэффициента трения скольжения сцепления, раскрытый в настоящем изобретении, обладает следующими преимуществами:
способ корректировки упомянутого коэффициента трения скольжения сцепления по настоящему изобретению предполагает использование позиционного соотношения между двигателем и сцеплением для получения соответствующей разности крутящих моментов, что позволяет получать разность крутящих моментов в реальном времени, а также получать корректировочный весовой показатель, соответствующий крутящему моменту двигателя в соответствии с этой разностью крутящих моментов, в результате чего в соответствии с данным корректировочным весовым показателем, а также состоянием обкатки сцепления корректируется коэффициент трения скольжения сцепления. Это позволяет избежать проблемы, когда корректировка коэффициента трения скольжения сцепления происходит только в условиях небольшого диапазона разности скоростей вращения, и обеспечивает корректировку коэффициента трения скольжения сцепления в любое время, делая корректировку коэффициента трения скольжения полной и гибкой.
Еще одна задача настоящего изобретения заключается в том, чтобы предоставить устройство корректировки физического коэффициента трения скольжения сцепления для решения проблемы неполной корректировки данного коэффициента вследствие того, что корректировка происходит только на определенной фазе.
Для решения вышеупомянутой проблемы предлагается следующая реализация технического решения по настоящему изобретению:
Устройство корректировки коэффициента трения скольжения сцепления, при этом упомянутое устройство корректировки коэффициента трения скольжения сцепления включает:
первый модуль получения, предназначенный для получения разности крутящих моментов в соответствии с позиционным соотношением двигателя и сцепления;
второй модуль получения, предназначенный для получения корректировочного весового показателя, соответствующего крутящему моменту двигателя, в соответствии с упомянутой разностью крутящих моментов;
модуль корректировки, предназначенный для корректировки коэффициента трения скольжения в соответствии с упомянутым корректировочным весовым показателем и состоянием обкатки сцепления.
При этом упомянутый первый модуль получения включает:
первый подмодуль получения, предназначенный для получения переменной величины угла между двигателем и входом сцепления;
первый подмодуль вычисления, предназначенный для вычисления упомянутой разности крутящих моментов в соответствии с крутящим моментом двигателя, крутящим моментом сцепления перед тем, как автомобиль тронется, и крутящим моментом сцепления перед тем, как сцепление примет крутящий момент, в случае, когда упомянутая переменная величина меньше предварительно установленного порогового значения;
второй подмодуль вычисления, предназначенный для вычисления упомянутой разности крутящих моментов в соответствии с моментом инерции конца вала двигателя и угловым ускорением, в случае, когда упомянутая переменная величина больше или равна предварительно установленному пороговому значению.
При этом упомянутый второй модуль получения включает:
подмодуль определения диапазона, предназначенный для определения диапазона крутящего момента, соответствующего упомянутому крутящему моменту двигателя;
подмодуль выбора, предназначенный для выбора из корректировочных весовых показателей, соответствующих упомянутому диапазону крутящего момента (существует по крайней мере один корректировочный весовой показатель) корректировочного весового показателя, соответствующего упомянутой разности крутящих моментов.
При этом, упомянутый модуль корректировки включает:
подмодуль корректировки, предназначенный для корректировки упомянутого состояния обкатки сцепления в соответствии с упомянутым корректировочным весовым показателем и получения откорректированного состояния обкатки;
подмодуль интерполяции, предназначенный для интерполяции между коэффициентом трения скольжения нового сцепления и коэффициентом трения скольжения обкатанного сцепления в соответствии с откорректированным состоянием обкатки и получения откорректированного коэффициента трения скольжения.
При этом упомянутое устройство корректировки коэффициента трения скольжения сцепления также включает:
модуль оценки, предназначенный для оценки того, отвечает ли автомобиль предварительным условиям в соответствии с параметрами состояния автомобиля;
третий модуль получения, предназначенный для получения времени поддержания состояния автомобилем при удовлетворении автомобилем упомянутых предварительных условий;
Упомянутый первый модуль получения включает:
второй подмодуль получения, предназначенный для получения разности крутящих моментов в соответствии с позиционным соотношением двигателя и сцепления, когда упомянутое время поддержания состояния не меньше предварительно установленного значения.
По сравнению с существующей техникой упомянутое устройство корректировки коэффициента трения скольжения сцепления обладает теми же преимуществами, что и упомянутый способ корректировки коэффициента трения скольжения сцепления, поэтому их описание здесь приводиться не будет.
Приведенное выше описание представляет собой краткий обзор технического решения по настоящему изобретению. Для более ясного понимания технологических средств настоящего изобретения и облегчения реализации сути изобретения, а также для облегчения понимания и внесения ясности в вышеупомянутые и прочие задачи, особенности и преимущества настоящего изобретения далее приводятся конкретные варианты осуществления настоящего изобретения.
Описание изображений
Прилагаемые изображения, которые являются частью настоящего изобретения, предназначены для более глубокого понимания настоящего изобретения и являются частью описания изобретения. Схематические варианты осуществления и их описание предназначены для разъяснения настоящего изобретения и ни в коей степени не ограничивают настоящее изобретение. На изображениях:
Фигура 1 представляет собой схему последовательности этапов способа корректировки коэффициента трения скольжения сцепления по варианту осуществления настоящего изобретения.
Фигура 2 представляет собой схему последовательности этапов способа корректировки коэффициента трения скольжения сцепления по варианту осуществления настоящего изобретения.
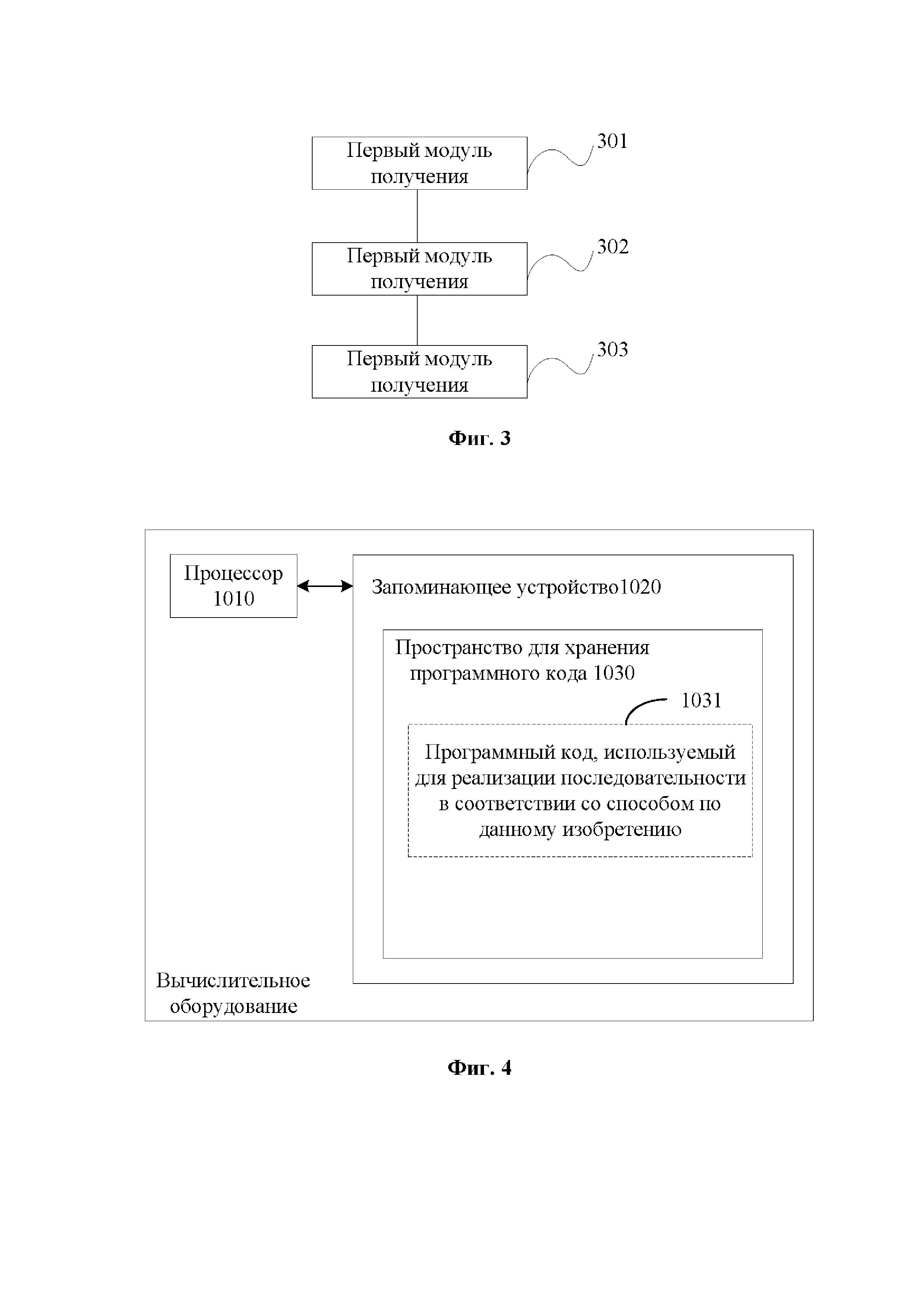
Фигура 3 представляет собой структурную блок-схему устройства корректировки коэффициента трения скольжения сцепления по варианту осуществления настоящего изобретения.
На Фигуре 4 схематически изображена блок-схема вычислительного оборудования, используемого для реализации способа по настоящему изобретению;
На Фигуре 5 схематически изображен блок памяти, предназначенный для хранения или портативного осуществления программного кода способа по настоящему изобретению.
Конкретные варианты осуществления
Для более четкого разъяснения задач, технических решений и преимуществ настоящего изобретения далее приводится подробное и полное описание технических решений по вариантам осуществления настоящего изобретения, сопровождающееся изображениями вариантов осуществления настоящего изобретения. При этом очевидно, что описываются только некоторые, а не все варианты осуществления настоящего изобретения. Все остальные варианты осуществления, которые могут быть выведены рядовым техническим персоналом данной области на основе описанных здесь вариантов осуществления настоящего изобретения, не применяя созидательного труда, также входят в диапазон защиты настоящего изобретения. Необходимо отметить, что варианты осуществления настоящего изобретения и характеристики вариантов осуществления могут комбинироваться друг с другом при условии, что они не противоречат друг другу.
Далее приводится подробное описание настоящего изобретения по прилагаемым изображениям и в сочетании с вариантами осуществления.
На Фиг. 1 показана схема последовательности этапов способа корректировки коэффициента трения скольжения сцепления по варианту осуществления настоящего изобретения, которая может конкретно включать следующие этапы:
этап 101: получение разности крутящих моментов в соответствии с позиционным соотношением двигателя и сцепления.
При этом разность крутящих моментов представляет собой разностное значение текущего крутящего момента сцепления и крутящего момента двигателя.
Во время езды автомобиля его сцепление передает крутящий момент двигателя, позволяя автомобилю нормально ехать. Двигатель автомобиля предназначен для вывода движущей силы. Кроме того, между входом сцепления и двигателем существует динамически меняющийся угол, по которому можно решить, находится ли сцепление и двигатель в состоянии динамического равновесия, и получить разность крутящих моментов способом, соответствующим результату этого решения.
В частности, автомобиль может отслеживать позиционное соотношение двигателя и сцепления и определять, изменился ли угол между двигателем и входом сцепления. Например, автомобиль может определять, продолжает ли увеличиваться угол между двигателем и входом сцепления, а затем в соответствии с полученным результатом выбирать соответствующий способ вычисления, после чего выполнять вычисление разности крутящих моментов согласно выбранному способу вычисления.
Если обнаруживается, что угол между двигателем и входом сцепления не меняется, при этом поддерживается динамическое равновесие и отсутствует относительное приращение, то вычисление разности крутящих моментов производится в соответствии с крутящим моментом сцепления и крутящим моментом двигателя. Однако, если обнаруживается, что угол между двигателем и входом сцепления по-прежнему меняется, то есть между двигателем и сцеплением не достигнуто состояние динамического равновесия, то вычисление разности крутящих моментов производится в соответствии с моментом инерции двигателя и угловым ускорением.
Этап 102: получение корректировочного весового показателя, соответствующего крутящему моменту двигателя в соответствии с разностью крутящих моментов.
После получения разности крутящих моментов автомобиль определяет диапазон крутящего момента, соответствующий крутящему моменту двигателя, а затем осуществляет поиск среди корректировочных весовых показателей, соответствующих этому диапазону крутящего момента, такого корректировочного весового показателя, который соответствует диапазону крутящего момента.
При этом данному диапазону крутящего момента могут соответствовать несколько корректировочных весовых показателей, но каждый корректировочный весовой показатель соответствует только одному диапазону крутящего момента.
Этап 103: корректировка коэффициента трения скольжения в соответствии с упомянутым корректировочным весовым показателем и состоянием обкатки сцепления.
При этом состояние обкатки данного сцепления используется как показатель степени обкатки сцепления автомобиля.
После получения автомобилем корректировочного весового показателя корректируется состояние обкатки сцепления в соответствии с данным корректировочным весовым показателем и выводится откорректированное состояние обкатки сцепления, после чего осуществляется интерполяция между предварительно установленным коэффициентом трения скольжения нового сцепления и коэффициентом трения скольжения обкатанного сцепления в соответствии с откорректированным состоянием обкатки, в результате чего получается откорректированный коэффициент трения скольжения.
Резюмируя вышесказанное, способ корректировки упомянутого коэффициента трения скольжения сцепления по варианту осуществления настоящего изобретения предполагает использование позиционного соотношения между двигателем и сцеплением для получения разности крутящих моментов способом, соответствующим данному позиционному соотношению. Это позволяет получать разность крутящих моментов в реальном времени и получать корректировочный весовой показатель, соответствующий крутящему моменту двигателя в соответствии с этой разностью крутящих моментов, в результате чего в соответствии с данным корректировочным весовым показателем, а также состоянием обкатки сцепления корректируется коэффициент трения скольжения, что позволяет избежать проблемы, когда корректировка коэффициента трения скольжения происходит только в условиях небольшого диапазона разности скоростей вращения. Это обеспечивает корректировку коэффициента трения скольжения в любое время и делает его корректировку полной и гибкой.
На Фиг. 2 показана схема последовательности этапов способа корректировки коэффициента трения скольжения сцепления по варианту осуществления настоящего изобретения, которая может фактически включать следующие этапы:
Этап 201: определение того, отвечает ли автомобиль предварительным условиям в соответствии с параметрами состояния автомобиля.
Для осуществления точной передачи крутящего момента двигателя во время движения автомобиля необходимо корректировать коэффициент трения скольжения сцепления. Перед корректировкой коэффициента трения скольжения необходимо в соответствии с параметрами состояния автомобиля определить, отвечает ли текущее состояние автомобиля предварительным условиям для того, чтобы в соответствии с этим решением на следующем этапе можно было определить, необходимо ли корректировать коэффициент трения скольжения.
В частности, во время движения автомобиля можно получить по крайней мере один параметр состояния автомобиля и в соответствии с каждым параметром состояния определить предварительные условия, соответствующие каждому параметру состояния, а затем решить, отвечает ли каждый параметр состояния соответствующим предварительным условиям.
При этом данные параметры состояния могут включать по крайней мере один из следующих параметров состояния: положение передачи, температура масла и момент интегрального контроля трения микроскольжения. Аналогично, предварительно установленные условия, соответствующие каждому параметру состояния, могут включать: положение передачи автомобиля больше или равно предварительно установленному положению передачи; температура масла находится в предварительно установленном диапазоне температур; а также момент интегрального контроля трения микроскольжения ниже предварительно установленного момента.
Например, предустановленной передачей может быть 3 передача, а предустановленным диапазоном температуры – диапазон от 40°C до 90°C (Цельсия). Когда автомобиль находится на 3 передаче и выше, это обычно означает малое изменение коэффициента скорости и малое колебание скорости вращения.
В некоторых вариантах осуществления момент интегрального контроля трения микроскольжения может измеряться напрямую или получаться в результате вычислений; определение момента интегрального контроля трения микроскольжения относится к элементарным знаниям данной области и настоящим не ограничивается. К примеру, предварительно установленный крутящий момент может составлять примерно 5% от крутящего момента двигателя, например, находиться в диапазоне 3-10% или 4-7%. Предварительно установленный крутящий момент определяется в соответствии с величиной крутящего момента двигателя; с помощью этого предварительно установленного крутящего момента происходит ограничение крутящего момента интеграла трения микроскольжения. Если крутящий момент интеграла трения микроскольжения ниже предварительного установленного крутящего момента, то это значит, что состояние сцепления и двигателя сравнительно стабильное.
Необходимо отметить, что во время практического применения автомобиль может иметь несколько параметров состояния, при этом каждый параметр состояния соответствует одному предварительному условию. Например, вышеупомянутые параметры состояния также могут включать следующие: параметр соответствующего угла трения скольжения двигателя и сцепления; параметр ограничения и стабильности скорости вращения двигателя; параметр стабильности крутящего момента двигателя; диапазон крутящего момента двигателя; параметр определения перехода автомобиля в стабильное состояние на основе угла трения микроскольжения; параметр температуры воды в двигателе и другие. Каждый параметр состояния соответствует определенному предварительному условию, перечисление которых здесь не приводится. Только если каждый параметр состояния удовлетворяет соответствующему предварительному условию, то выполняется этап 202. Но если один из параметров состояния не удовлетворяет соответствующему предварительному условию, то это значит, что автомобиль не может откорректировать коэффициент трения скольжения, и тогда последующие этапы осуществляться не будут, а будет непрерывно осуществляться этап 201 до тех пор, пока каждый параметр состояния не будет удовлетворять предварительным условиям.
Этап 202: получение времени поддержания состояния при удовлетворении автомобилем предварительных условий.
При этом данное время поддержания состояния предназначено для показа продолжительности времени, в течение которого показатель состояния автомобиля продолжает удовлетворять предварительному условию.
Если автомобиль определяет, что параметры состояния отвечают соответствующим предварительным условиям, то есть автомобиль отвечает предварительным условиям, необходимо отслеживать время, в течение которого автомобиль отвечает предварительным условиям, а затем в соответствии с отслеженным временем принимается решение о том, стабильно ли текущее состояние автомобиля.
В частности, когда автомобиль отвечает предварительным условиям, можно отслеживать каждый параметр состояния автомобиля и получать продолжительность времени, в течение которого каждый параметр состояния отвечает соответствующим предварительным условиям, выводить из него время поддержания состояния, чтобы на последующих этапах автомобиль мог в соответствии с этим временем поддержания состояния оценивать, стабильно ли текущее состояние автомобиля.
Если автомобиль обнаруживает, что время поддержания состояния, соответствующее каждому параметру состояния, достигает предварительно установленного значения предварительных настроек, то можно выполнять этап 203. Но если автомобиль обнаруживает, что продолжительность времени, в течение которого какой-либо соответствующий предварительным условиям параметр состояния, меньше установленного значения, то это значит, что текущее состояние автомобиля не является стабильным, в этом случае становится невозможно откорректировать коэффициент трения скольжения и необходимо повторно выполнять этапы 201 и 202 до тех пор, пока время поддержания состояния автомобиля не достигнет предварительно установленного значения, то есть время поддержания состояния будет не меньше предварительно установленного значения.
Этап 203: получение разности крутящих моментов в соответствии с позиционным соотношением двигателя и сцепления, когда упомянутое время поддержания состояния не меньше предварительно установленного значения.
Когда полученное время поддержания состояния достигает предварительно установленного значения, и если время поддержания данного состояния превышает или равно предварительно установленному значению, можно утверждать, что текущее состояние автомобиля стабильно и можно получать разность крутящих моментов в соответствии с позиционным соотношением двигателя и сцепления автомобиля.
В частности, когда время поддержания текущего состояния не меньше предварительно установленного значения, автомобиль может получать позиционное соотношение двигателя и входа сцепления, то есть получать динамически меняющийся угол, образованный между двигателем и входом сцепления. Таким образом, в соответствии с переменной величиной данного угла определяется, может ли сцепление перед принятием крутящего момента (Coming) принять полный крутящий момент двигателя, после чего в зависимости от этого решения выбирается соответствующий способ получения разности крутящих моментов.
Как вариант, автомобиль может получать переменную величину угла между двигателем и входом сцепления. При этом, если эта переменная величина ниже предварительно установленного порогового значения, то разность крутящих моментов вычисляется в соответствии с крутящим моментом двигателя, крутящим моментом сцепления перед тем, как автомобиль тронется (Going), и крутящим моментом сцепления, которое должно принять крутящий момент. Но если эта переменная величина выше или равна данному предварительно установленному пороговому значению, то разность моментов вычисляется в соответствии с моментом инерции конца вала двигателя и угловым ускорением.
Ввиду того, что угол между двигателем и сцеплением динамически изменяется, если переменная величина угла между двигателем и входом сцепления равна 0 или какому-либо очень малому значению параметра, это значит, что между сцеплением Coming и двигателем существует состояние динамического равновесия, а угол между двигателем и входом сцепления, возможно, больше не будет увеличиваться, то сцепление Coming может принять весь крутящий момент двигателя. Но если переменная величина угла между входом сцепления и двигателем больше или равна предварительно установленному пороговому значению, то это значит, что угол между двигателем и входом сцепления, возможно, по-прежнему продолжает увеличиваться, то есть между входом сцепления и двигателем по-прежнему существует трение скольжения.
Таким образом, автомобиль может определять, меняется ли угол между входом сцепления и двигателем в соответствии с позиционным соотношением сцепления и двигателя, а затем в зависимости от этого решения выбирать соответствующий способ получения разности крутящих моментов.
В частности, после получения переменой величины угла автомобиль может определять, происходит ли относительное увеличение угла между двигателем и сцеплением в соответствии с полученной переменной величиной угла. Если эта переменная величина показывает, что угол между двигателем и входом сцепления не меняется, то можно вычислить разность крутящих моментов способом, соответствующим текущему состоянию.
Например, если определено, что переменная величина угла между двигателем и входом сцепления меньше предварительно установленного порогового значения, или если определено, что угол между двигателем и входом сцепления не увеличивается, то можно сначала суммировать крутящий момент двигателя и крутящий момент сцепления Going (перед тем, как автомобиль тронется), после чего вычесть из этой суммы крутящий момент сцепления Coming и получить разность крутящих моментов.
При этом, если значение сцепления Going является отрицательным числом, то оно принимается за 0.
Аналогично, если после получения автомобилем переменной величины эта переменная величина показывает, что угол между двигателем и входом сцепления больше или равен предварительно установленному пороговому значению, то это значит, что угол между двигателем и входом сцепления по-прежнему продолжает увеличиваться, а двигатель и сцепление Coming не находятся в состоянии динамического равновесия, и можно вычислять разность крутящих моментов в соответствии с моментом инерции конца вала двигателя и угловым ускорением.
Например, если определяется, что угол между двигателем и входом сцепления продолжает увеличиваться, то можно умножить момент инерции конца вала двигателя на угловое ускорение конца вала двигателя, после чего использовать полученное произведение в качестве разности крутящих моментов.
Этап 204: получение корректировочного весового показателя, соответствующего крутящему моменту двигателя в соответствии с разностью крутящих моментов.
После получения разности крутящих моментов автомобиль может продолжать получать текущий крутящий момент двигателя, чтобы найти среди нескольких предварительно установленных диапазонов крутящих моментов подходящий диапазон крутящих моментов, соответствующий данному крутящему моменту двигателя, что позволит выбрать из нескольких корректировочных весовых показателей, соответствующих подходящему диапазону крутящих моментов, корректировочный весовой показатель, соответствующий разности крутящих моментов.
Как вариант, автомобиль может в соответствии с крутящим моментом двигателя определять диапазон крутящего момента, соответствующего крутящему моменту двигателя, а затем выбирать из нескольких (как минимум одного) корректировочных весовых показателей, соответствующих данному диапазону крутящего момента, тот корректировочный весовой показатель, который соответствует разности крутящих моментов.
В частности, автомобиль может сначала в соответствии с предварительно установленным диапазоном крутящего момента определить диапазон крутящего момента, соответствующий крутящему моменту двигателя. После чего в соответствии с диапазоном, в котором находится полученный крутящий момент двигателя, выбирать из нескольких корректировочных весовых показателей, соответствующих данному диапазону крутящего момента, тот корректировочный весовой показатель, который соответствует диапазону, в котором находится данная разность крутящих моментов.
Например, как показано в Таблице 1, Engine T0, Engine T1 и Engine T2 являются различными диапазонами, соответствующими крутящему моменту двигателя, а ΔT0, ΔT1, ΔT2 и ΔT3 представляют собой различные диапазоны, соответствующие разности крутящих моментов. Если разность крутящих моментов, полученная автомобилем, соответствует диапазону ΔT2, а текущий крутящий момент двигателя соответствует диапазону Engine T1, то можно получить MuOffset12, который представляет собой соответствующий корректировочный весовой показатель.

Этап 205: корректировка коэффициента трения скольжения в соответствии с упомянутым корректировочным весовым показателем и состоянием обкатки сцепления.
При этом состояние обкатки данного сцепления используется как показатель степени обкатки сцепления автомобиля.
После выбора автомобилем корректировочного весового показателя, он может корректировать предварительно установленное состояние обкатки сцепления в соответствии с данным корректировочным весовым показателем и получать откорректированное состояние обкатки сцепления. После чего вычислять откорректированный коэффициент трения скольжения в соответствии с откорректированным состоянием обкатки сцепления, используя несколько предварительно установленных коэффициентов трения скольжения.
В частности, автомобиль может корректировать состояние обкатки сцепления в соответствии с корректировочным весовым показателем, получая откорректированное состояние обкатки, после чего в соответствии с откорректированным состоянием обкатки осуществлять интерполяцию между коэффициентом трения скольжения нового сцепления и коэффициентом трения скольжения обкатанного сцепления, получая откорректированный коэффициент трения скольжения.
В частности, автомобиль может осуществлять интерполяцию между коэффициентом трения скольжения нового сцепления и коэффициентом трения скольжения обкатанного сцепления в соответствии со степенью обкатки, а затем осуществлять корректировку степени откатки посредством корректировочного весового показателя, получая таким образом откорректированный коэффициент трения скольжения.
Например, автомобиль может осуществлять корректировку коэффициента трения скольжения в соответствии с предварительно установленной формулой корректировки. Формула корректировки может быть такой: E= A*[1-(C+D)]+B*(C+D), где E – это откорректированный коэффициент трения скольжения, A – коэффициент трения скольжения нового сцепления, B – коэффициент трения скольжения обкатанного сцепления, C – степень обкатки, а D – корректировочный весовой показатель.
Резюмируя вышесказанное, способ корректировки упомянутого коэффициента трения скольжения сцепления по варианту осуществления настоящего изобретения предполагает использование позиционного соотношения между двигателем и сцеплением для получения разности крутящих моментов способом, соответствующим данному позиционному соотношению, что позволяет получать разность крутящих моментов в реальном времени и получать корректировочный весовой показатель, соответствующий крутящему моменту двигателя в соответствии с этой разностью крутящих моментов. В результате, в соответствии с данным корректировочным весовым показателем, а также состоянием обкатки сцепления корректируется коэффициент трения скольжения, что позволяет избежать проблемы, когда корректировка коэффициента трения скольжения происходит только в условиях небольшого диапазона разности скоростей вращения. Это обеспечивает корректировку коэффициента трения скольжения в любое время и делает его корректировку полной и гибкой.
На Фиг. 3 показана структурная блок-схема устройства корректировки коэффициента трения скольжения сцепления по варианту осуществления настоящего изобретения, которая может включать следующее:
первый модуль получения 301, предназначенный для получения разности крутящих моментов в соответствии с позиционным соотношением двигателя и сцепления;
второй модуль получения 302, предназначенный для получения корректировочного весового показателя, соответствующего крутящему моменту двигателя, в соответствии с упомянутой разностью крутящих моментов;
модуль корректировки 303, предназначенный для корректировки коэффициента трения скольжения в соответствии с данным корректировочным весовым показателем и состоянием обкатки сцепления.
При этом данный первый модуль получения 301 включает:
первый подмодуль получения, предназначенный для получения переменной величины угла между двигателем и входом сцепления;
первый подмодуль вычисления, предназначенный для вычисления упомянутой разности крутящих моментов в соответствии с крутящим моментом двигателя, крутящим моментом сцепления перед тем, как автомобиль тронется, и крутящим моментом сцепления перед тем, как сцепление примет крутящий момент, в случае когда упомянутая переменная величина меньше предварительно установленного порогового значения;
второй вычислительный подмодуль, предназначенный для вычисления упомянутой разности крутящих моментов в соответствии с моментом инерции конца вала двигателя и угловым ускорением в случае когда упомянутая переменная величина больше или равна предварительно установленному пороговому значению.
При этом упомянутый второй модуль получения 302 включает:
подмодуль определения диапазона, предназначенный для определения диапазона крутящего момента, соответствующего данному крутящему моменту двигателя, в соответствии с крутящим моментом двигателя;
подмодуль выбора, предназначенный для выбора из корректировочных весовых показателей, соответствующих упомянутому диапазону крутящего момента (существует по крайней мере один корректировочный весовой показатель), такого корректировочного весового показателя, который соответствует упомянутой разности крутящих моментов.
При этом данный модуль корректировки 303 включает:
подмодуль корректировки, предназначенный для корректировки состояния обкатки сцепления в соответствии с данным корректировочным весовым показателем и получения откорректированного состояния обкатки;
подмодуль интерполяции, предназначенный для интерполяции между коэффициентом трения скольжения нового сцепления и коэффициентом трения скольжения обкатанного сцепления в соответствии с откорректированным состоянием обкатки и получения откорректированного коэффициента трения скольжения.
При этом данное устройство корректировки коэффициента трения скольжения сцепления также включает:
модуль оценки, предназначенный для оценки того, отвечает ли автомобиль предварительным условиям, в соответствии с параметрами состояния автомобиля;
третий модуль получения, предназначенный для получения времени поддержания состояния при удовлетворении автомобилем упомянутых предварительных условий;
Данный первый модуль получения 301 включает:
второй подмодуль получения, предназначенный для получения разности крутящих моментов в соответствии с позиционным соотношением двигателя и сцепления, когда упомянутое время поддержания состояния не меньше предварительно установленного значения.
Описанные выше способы реализации устройства несут лишь ориентировочный характер, при этом блоки, охарактеризованные в них как отдельные детали, могут быть или не быть физически разделены, а показанные в блоках детали могут быть или не быть физическими блоками, то есть они могут находиться в одном месте или быть распределены на множество сетевых блоков. В зависимости от фактических потребностей задачи технического решения по настоящему варианту осуществления можно достичь путем реализации некоторых или всех модулей. Рядовой технический персонал данной области может, не применяя созидательного труда, понять и осуществить настоящее изобретение.
Варианты осуществления каждой детали настоящего изобретения могут быть реализованы как в форме аппаратного обеспечения, так и в форме программного модуля, работающего на базе одного или нескольких процессоров, а также посредством сочетания этих двух вариантов. Технический персонал данной области должен понимать, что некоторые или все функции некоторых или всех частей вычислительного оборудования по вариантам осуществления настоящего изобретения можно реализовать на практике, используя микропроцессор или цифровой процессор обработки сигналов (DSP, ЦПОС). Настоящее изобретение также может осуществляться в виде программы некоторого или всего оборудования или устройства, используемого для выполнения описанного здесь способа (например, компьютерной программы или компьютерного программного продукта). Такая программа, реализующая настоящее изобретение, может храниться на машинно-читаемых носителях или иметь форму одного или нескольких сигналов. Такие сигналы можно получать путем загрузки с веб-сайта в Интернете, предоставлять в форме сигналов на носителе или предоставлять в любой другой форме.
Например, на Фигуре 4 изображено вычислительное оборудование, способное реализовать способ по настоящему изобретению. Традиционно такое вычислительное оборудование включает процессор 1010 и компьютерный программный продукт в форме запоминающего устройства 1020 или машинно-читаемого носителя. Запоминающее устройство 1020 может представлять собой, например, флэш-память, EEPROM (электрически-стираемое программируемое ПЗУ), EPROM (стираемое программируемое ПЗУ), жесткий диск или электронное запоминающее устройство типа ROM (ПЗУ). Запоминающее устройство 1020 имеет пространство памяти 1030, используемое для выполнения программного кода 1031 любых этапов описанного выше способа. Например, пространство памяти 1030, используемое для программного кода, может включать различные программные коды 1031, по-отдельности используемые для выполнения различных этапов описанного выше способа. Эти программные коды могут считываться с одного или нескольких компьютерно-программных продуктов или вписываться в этот один или несколько компьютерно-программных продуктов. Эти компьютерно-программные продукты включают такие носители программного кода, как например, жесткий диск, компакт-диск (CD), карты памяти или дискета. Эти компьютерно-программные продукты обычно представляют собой портативные или стационарные запоминающие устройства, например, показанные на Фиг. 5. Эти запоминающие устройства могут иметь сегменты памяти или пространство памяти с компоновкой, сходной с запоминающими устройствами 1020 вычислительного оборудования, показанного на Фиг. 4. Как вариант, программный код может сжиматься подходящим способом. Обычно запоминающие устройства включают машинно-читаемый код 1031’, то есть код, который может быть считан процессором, сходным, например, с процессором 1010; когда эти коды запускаются на вычислительном оборудовании, в результате этого данное вычислительное оборудование выполняет различные этапы описанного выше способа.
Упоминаемые здесь выражения «один вариант осуществления», «вариант осуществления» или «один или несколько вариантов осуществления» означают, что особые характеристики, структура или свойства, описанные в связи с вариантами осуществления, включены в, по крайней мере, один вариант осуществления настоящего изобретения. Кроме того, необходимо отметить, что используемое здесь выражение «в одном варианте осуществления» не обязательно в каждом случае указывает на один и тот же вариант осуществления.
В содержащемся здесь раскрытии изобретения описано множество конкретных деталей, однако необходимо понимать, что варианты осуществления настоящего изобретения можно реализовать на практике без использования этих конкретных деталей. Во избежание неясностей в понимании настоящего раскрытия изобретения в некоторых вариантах осуществления общеизвестные способы, конструкции и технологии подробно не описываются.
В формуле изобретения никакие находящиеся в скобках справочные обозначения не должны ограничивать пункты формулы изобретения. Использование слова «включает» не означает, что не перечисленные в пункте формулы изобретения компоненты и этапы исключаются. Когда перед компонентом стоит слово «один», это не исключает возможности существования нескольких таких компонентов. Настоящее изобретение может осуществляться посредством включения аппаратного обеспечения нескольких различных компонентов, а также посредством компьютера с соответствующими программами. В пунктах формулы изобретения, где перечислены блоки нескольких установок, несколько из этих установок могут на практике осуществляться посредством одного и того же аппаратного обеспечения. Используемые здесь слова «первый», «второй», «третий» и т.д. не обозначают очередности, и их следует понимать как названия.
В заключение необходимо пояснить следующее: приведенные выше варианты осуществления используются только для разъяснения технических решений данного изобретения и не ограничивают его; рядовой технический персонал данной сферы должен понимать, что он по-прежнему может вносить изменения в описанные технические решения каждого вышеупомянутого варианта осуществления или осуществлять тождественную замену некоторых технических характеристик вариантов осуществления; при этом эти изменения и замены не приводят к отделению сути соответствующих технических решений от духа и диапазона технических решений вариантов осуществления данного изобретения.
Реферат
Настоящее изобретение раскрывает способ и устройство корректировки коэффициента трения скольжения сцепления, при этом способ включает получение разности крутящих моментов в соответствии с позиционным соотношением двигателя и сцепления, получение корректировочного весового показателя, соответствующего крутящему моменту двигателя, в соответствии с разностью крутящих моментов, корректировку коэффициента трения скольжения в соответствии с упомянутым корректировочным весовым показателем и состоянием обкатки сцепления. Способ предполагает использование позиционного соотношения между двигателем и сцеплением для получения разности крутящих моментов способом, соответствующим данному позиционному соотношению, что позволяет получать разность крутящих моментов в реальном времени и получать корректировочный весовой показатель, соответствующий крутящему моменту двигателя в соответствии с этой разностью крутящих моментов. В результате, в соответствии с данным корректировочным весовым показателем, а также состоянием обкатки сцепления корректируется коэффициент трения скольжения, что позволяет избежать проблемы, когда корректировка коэффициента трения скольжения происходит только в условиях небольшого диапазона разности скоростей вращения. Это обеспечивает корректировку коэффициента трения скольжения в любое время и делает его корректировку полной и гибкой. 2 н. и 13 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ управления автоматическим сцеплением и автоматическая трансмиссия, использующая этот способ
Комментарии