Инструментальная машина - RU2684988C2
Код документа: RU2684988C2
Чертежи












Описание
Посредством настоящей ссылки полное содержание приоритетной заявки DE 20 2013 006 900.7 становится составной частью настоящей заявки.
Настоящее изобретение касается инструментальной машины, в частности, ручной инструментальной машины, которая имеет устройство для посадки инструмента, движущееся вокруг выходной оси.
Ниже изобретение описывается преимущественно на примере, в частности, ручной инструментальной машины, которая имеет устройство для посадки инструмента, совершающее вращательно-осциллирующее движение вокруг выходной оси. Но это ограничение формулировки не должно пониматься как ограничение возможностей применения такой инструментальной машины.
Вместо термина «устройство для посадки инструмента» ниже, для упрощения, используется также термин «крепление для инструмента». Но это также не должно пониматься как ограничение.
Инструментальная машина представляет собой устройство, которое имеет один или несколько приводных двигателей и при необх. одно или несколько передаточных устройств, а также по меньшей мере один выходной вал, имеющий понимаемую в геометрическом смысле выходную ось. На выходном валу опосредствованно или непосредственно установлено устройство для посадки инструмента. Устройство для посадки инструмента представляет собой конструктивный элемент или, соответственно, представляет собой конструктивные элементы, с помощью которого или, соответственно, которых вращающий момент прикладывается к инструменту, при этом устройство для посадки инструмента предпочтительно также удерживает инструмент, в частности у ручной инструментальной машины, так что этот инструмент с помощью одного только устройства для посадки инструмента как удерживается, так и получает выходной вращающий момент. Термин «выходной момент» и термины, образованные со словом «выходной», подразумевают момент, передаваемый на инструмент от инструментальной машины, или, соответственно, соответствующие конструктивные элементы инструментальной машины, термин «приводной момент» означает момент, воспринимаемый инструментом.
Ручная инструментальная машина имеет устройство для переноски, в частности ручки и тому подобное, с помощью которых обслуживающий персонал может направлять инструментальную машину с закрепленным на нем инструментом. Обычно ручные инструментальные машины снабжены электрическим приводным двигателем, но известны и в рамках изобретения применимы также другие конструкции, такие как, напр., инструментальные машины гидравлического или пневматического действия.
В уровне техники известно множество инструментов или инструментальных устройств, которые предусмотрены для того, чтобы использоваться с инструментальной машиной, имеющей вращающееся устройство для посадки инструмента. Такими инструментами являются, например, сверла, шлифовальные и отрезные диски, круглые пилы и пр. Эти инструменты закреплены в устройстве для посадки инструмента, которое, в зависимости от применения, инструмента и машины, вращается с частотой вращения от близкой к 0 до нескольких 1000 оборотов/мин., а в экстремальных случаях даже значительно выше. При эксплуатации инструмент с более или менее высоким давлением прижатия приводится в контакт с заготовкой, на которой он затем выполняет соответствующий обрабатывающий процесс. Обрабатывающие силы, возникающие при этом на расстоянии от оси вращения, то есть, например, силы резания или шлифования, вызывают момент вращения вокруг выходной оси, который компенсируется выходным моментом, передаваемым от инструментальной машины на инструментальное устройство. Передача этого выходного момента на инструмент осуществляется через присоединительное устройство инструмента, с помощью которого этот инструмент закреплен в устройстве для посадки инструмента. Таким образом, у инструмента, который при обработке по существу всегда вращается в одном и том же направлении, во время использования инструмента возникают силы, действующие на устройство для посадки инструмента по существу в одном и том же направлении, но различные по величине.
В уровне техники известны также инструментальные машины, имеющие вращательно-осциллирующее устройство для посадки инструмента. Под инструментальной машиной, имеющей осциллирующее или вращательно-осциллирующее устройство для посадки инструмента, здесь понимается инструментальная машина с движением устройства для посадки инструмента, при котором устройство для посадки инструмента движется, начиная от среднего положения, в первом направлении вращения, затормаживается до останова и затем движется в обратном направлении вращения снова до останова.
Угловое расстояние от среднего положения до соответствующего конечного положения может обычно составлять до 5°, однако у существующих машин чаще всего приняты меньшие углы от 1° до 2,5°, что соответствует общему угловому движению (от 1-го до 2-го конечного положения) от 2° до 5°. Это осциллирующее движение обычно совершается от 5000 до 50000 раз в минуту, однако возможны более низкие, а также более высокие частоты осцилляции (здесь выраженные в количестве колебаний/мин.).
Под вращательно-осциллирующим приводом устройства для посадки инструмента, так, как оно описывается в настоящей заявке, не следует понимать, в частности, возвратно-поступательный осциллирующий привод, который, в частности, известен по ножовочным устройствам. Под ножовочным устройством следует, в частности, понимать узкое ножовочное, саблевидное ножовочное или столярное ножовочное устройство или тому подобное.
Изменение направления вращения на противоположное приводит к тому, что также обрабатывающие силы инструмента, которые, как известно, всегда действуют против направления движения или, соответственно, здесь против направления вращения, тоже изменят свое направление. От изменяющих свое направление обрабатывающих сил соответственно плечу рычага, т.е. расстоянию от точки обработки инструмента до оси вращения, получается вращающий момент, который при осцилляции изменяет направление на противоположное. На вращающий момент, обусловленный обрабатывающими силами, накладывается другой момент, который действует как во время обработки, так и во время холостого хода, то есть вращающий момент, обусловленный моментом инерции массы инструмента, для затормаживания инструмента после его максимальной скорости (напр., соответствующего максимума амплитуды синусоиды при синусоидальном изменении скорости вращения устройства для посадки инструмента) и повторного ускорения инструмента в противоположном направлении, осуществляющегося после изменения направления вращения на противоположное.
Вращающие моменты, которые возникают вследствие обрабатывающих сил и вследствие кинематических условий осциллирующего привода, создаются инструментальной машиной и через устройство для посадки инструмента вводятся в инструментальное устройство.
В основе настоящего изобретения лежит задача, выполнить инструментальную машину так, чтобы выходной вращающий момент мог надежно передаваться через устройство для посадки инструмента.
Эта задача решается с помощью предмета п.1 формулы изобретения.
Предпочитаемые усовершенствования изобретения являются предметом зависимых пунктов формулы изобретения.
Предметом изобретения является, кроме того, обрабатывающая система или, соответственно, система инструментальной машины, которая имеет инструментальную машину по п.1 формулы изобретения или одному из зависимых пунктов формулы изобретения и инструментальное устройство.
В соответствии с изобретением инструментальная машина имеет устройство для посадки инструмента, с помощью которого инструментальное устройство может крепиться на инструментальной машине так, чтобы его выходная ось и ось вращения инструмента по существу совпадали. При этом термин «выходная ось» и «ось вращения инструмента» обозначает геометрическую ось вращения инструментальной машины или, соответственно, инструментального устройства.
Предлагаемая изобретением инструментальная машина имеет устройство для посадки инструмента, которое предназначено для того, чтобы удерживать инструментальное устройство на инструментальной машине таким образом, чтобы выходная ось и ось вращения инструмента по существу совпадали.
Для этого устройство для посадки инструмента может быть жестко соединено с инструментальной машиной, но устройство для посадки инструмента может быть также закреплено на выходном валу, выходном шпинделе или тому подобном.
Устройство для посадки инструмента имеет область передачи вращающего момента и удерживающее устройство. Область передачи вращающего момента предусмотрена для того, чтобы передавать выходной вращающий момент инструментальной машины на инструментальное устройство. И наоборот, область передачи вращающего момента предусмотрена также для того, чтобы передавать вращающий момент, в частности тормозной момент, возникающий при затормаживании движения инструмента, от инструментального устройства на инструментальную машину.
Устройство для посадки инструмента имеет, кроме того, удерживающее устройство, которое предусмотрено для того, чтобы удерживать инструмент во время эксплуатации. При этом удерживающее устройство должно быть выполнено так, чтобы могли надежно восприниматься силы, возникающие между устройством для посадки инструмента и инструментальным устройством, как при холостом ходе, так и при обработке. В частности, удерживающее устройство предпочтительно выполнено так, что им соответственно надежно воспринимаются как силы, которые действуют со стороны инструментального устройства на инструментальную машину в направлении инструментальной машины, и силы, которые действуют со стороны инструментального устройства в направлении от инструментальной машины. Как еще будет подробно излагаться позднее, удерживающее устройство предпочтительно выполнено так, что оно, хотя и препятствует нежелательному отсоединению инструментального устройства от устройства для посадки инструмента, но, с другой стороны, возможна также простая замена инструментального устройства.
Область передачи вращающего момента и удерживающее устройство могут быть также выполнены в виде одного общего устройства или в виде одного общего конструктивного элемента.
Область передачи вращающего момента имеет по меньшей мере две расположенные на расстоянии от упомянутой оси вращения инструмента области выходных поверхностей, которые имеют каждая множество точек поверхности. Термин «область выходной поверхности» (ниже также иногда обозначаемый только как «выходная поверхность») обозначает поверхность, которая по меньшей мере частично опосредствованно или непосредственно находится в контакте с инструментальным устройством, чтобы передавать выходной вращающий момент на инструментальное устройство. Термин «точка поверхности» подразумевает при этом точки на верхней стороне этих выходных поверхностей и должен пониматься геометрически.
Этот термин используется, чтобы характеризовать геометрическую точку, в которой касательная плоскость прилегает к некоторой поверхности. Вектор к точке поверхности перпендикулярно касательной плоскости описывает ориентацию поверхности в этой точке в пространство, которое, напр., задано трехмерной системой координат или другими исходными плоскостями или исходными поверхностями.
Поверхность имеет бесконечно много точек поверхности, так как каждая точка этой поверхности одновременно является также точкой поверхности в данном смысле. Однако чтобы описать на практике поверхность, искривленную в одном направлении или в нескольких направлениях, достаточно некоторого конечного количества точек поверхности. Под термином «искривленная в одном направлении» следует понимать поверхность, искривленную в каждой точке только в одном направлении, напр., цилиндрическую поверхность, под термином «искривленная в нескольких направлениях» - поверхность, искривленную по меньшей мере в одной точке в нескольких направлениях, напр., сферическую поверхность.
Плоская поверхность имеет только одну касательную плоскость, которая совпадает с самой поверхностью. Чтобы характеризовать плоскую поверхность, достаточно, таким образом, одной отдельной точки поверхности, причем это может быть каждая произвольная точка плоской поверхности.
Так как точки поверхности представляют собой геометрические точки, на поверхности они невидимы.
Для касательных плоскостей в этих точках поверхности действуют особые геометрические условия. Касательные плоскости, как вообще принято в геометрии, представляют собой плоскости, которые выполнены перпендикулярно нормальным векторам точек поверхности и касаются поверхности в точке поверхности. При этом термин «нормальный вектор» подразумевает вектор, который в этой точке поверхности ориентирован точно перпендикулярно поверхности.
Касательные плоскости в этих точках поверхности наклонены в двух направлениях. Во-первых, касательные плоскости наклонены относительно осевой плоскости, которая включает в себя выходную ось. Кроме того, эти касательные плоскости наклонены относительно радиальной плоскости, которая распространяется перпендикулярно выходной оси.
При этом расположение упомянутых выходных поверхностей иное, чем у устройств для посадки инструмента для осциллирующих машин, известных в уровне техники.
У известных инструментальных устройств, которые, например, представлены в немецких заявках на патент DE 10 2011 005 818 A1 и DE 296 05 728 U1, инструменты в соединительной области с устройством для посадки инструмента инструментальной машины выполнены по существу плоскими, т.е. в этой области они распространятся в плоскости, которая расположена перпендикулярно выходной оси. Выходные поверхности у таких инструментальных машин ориентированы перпендикулярно радиальной плоскости и параллельно плоскости выходной оси.
Уже сейчас следует заметить, что в одном из предпочтительных вариантов осуществления выходная поверхность является по существу плоской, т.е. что нормальные векторы всех точек поверхности ориентированы параллельно друг другу, и при этом выходная поверхность имеет всего только одну единственную касательную плоскость. Но в рамках изобретения возможно также, чтобы выходные поверхности были искривлены в одном направлении или в двух направлениях; тогда в этом случае нормальные векторы уже не параллельны друг другу.
В основе изобретения лежат следующие рассуждения.
Вследствие осциллирующего движения как устройство для посадки инструмента, так и область инструмента, в которой вводится вращающий момент, подвергается знакопеременной изгибающей нагрузке. У металлических материалов, из которых обычно изготавливаются устройства для посадки инструмента и инструменты, о которых здесь идет речь, эти нагрузки особенно проблематичны. Металлы имеют кристаллическую структуру. Если в некоторой области металлического конструктивного элемента возникают локальные избыточные нагрузки, т.е. действующие в этом конструктивном элементе напряжения в этом месте выше, чем напряжения, выдерживаемые этим конструктивным элементом, то между отдельными зернами металлической структуры возникают микротрещины. Они ухудшают прочность конструктивного элемента в двух отношениях. Во-первых, в области, в которой возникли микротрещины, в конструктивном элементе не могут передаваться напряжения. Это означает, что вследствие образования трещин нагрузки внутри этой области повышаются, так как эффективная поверхность для передачи силы уменьшается.
Во-вторых, возникает феномен, который в машиностроении обычно называется «влиянием надреза». Это название связано с тем, что в области надреза, в частности, когда надрез имеет острые кромки, возникает локальная концентрация напряжений, которая приводит к напряжениям сдвига в области материала, окружающего надрез, превышающим напряжения сдвига в областях конструктивного элемента, не подверженным влиянию такой геометрии.
Эти повышенные нагрузки приводят к тому, что образование трещин прогрессирует и в итоге приводит к выходу из строя этого конструктивного элемента.
Этот процесс, который, например, задокументирован в работах Палмргена и Майнера, называется накоплением повреждений.
Свойство материала или, соответственно, конструктивного элемента, выдерживать колеблющиеся нагрузки и, в частности, знакопеременные изгибающие нагрузки, обычно представляется так называемой линией Велера этого конструктивного элемента. В основе линии Велера лежит тот обнаруженный факт, что знакопеременная нагрузка (при испытании Велера речь идет о цикле нагружения, в частности о конструктивном элементе, состоящем из стали) во многих случаях может длительно выдерживаться тогда, когда этот конструктивный элемент переносит от 2 млн. до 6 млн. (в зависимости от материала) таких циклов нагружения при этой нагрузке без повреждения. Тогда в машиностроении говорят о так называемой усталостной прочности материала или, соответственно, конструктивного элемента.
Инструмент, приводимый в осциллирующее движение, колеблется, как указывалось выше, напр., с частотой 20000 колебаний/мин. На языке эксплуатационно-прочного исполнения конструктивного элемента это означает 20000 циклов нагружения/мин. или 1,2 млн. циклов нагружения/ч.
То есть, нижний предел усталостной прочности из опыта Велера, составляющий 2 млн. циклов нагружения, превышается уже через 2 часа времени эксплуатации инструмента.
Благодаря предлагаемому изобретением исполнению нагрузка от вращающего момента, которую может выдерживать устройство для посадки инструмента, повышается. Это достигается в первую очередь за счет того, что выходные поверхности расположены на расстоянии от оси вращения. Потому что воспринимаемая инструментом сила определяется как частное вращающего момента и расстояния (Fr=M/r, где M - вращающий момент, измеренный в Нм, F - сила в месте r в Н, а r - расстояние от точки приложения силы до выходной оси в м).
Увеличение расстояния до точки приложения силы наружу, т.е. от выходной оси или, соответственно, оси вращения инструмента, снижает вращающий момент.
Наклон выходных поверхностей приводит также к тому, что расстояния до точки приложения силы, в частности, увеличивается, вследствие чего локальная нагрузка понижается и, при соответствующем исполнении, ввод силы в остальные области устройства для посадки инструмента и инструмента улучшается.
Часть инструментальных устройств, применяемых обычно в осциллирующих машинах, имеет, например, рабочую область, которая расположена в окружном направлении, как, например, пильные и режущие инструменты. То есть рабочая область этих инструментов распространяется по существу в одной плоскости перпендикулярно оси вращения инструмента.
У таких инструментов в уровне техники обычно присоединительная область тоже выполнена плоско. Тогда приводной момент вводится в виде силы в направлении, перпендикулярном плоскости инструмента, напр., с помощью штифтов, приводной звездочки или тому подобного. Но в плоскости инструмента инструмент является особенно жестким, так что ввод силы осуществляется только через относительно малую область. Тогда в этой области могут возникать более высокие локальные нагрузки, которые приводят к снижению эксплуатационной прочности инструмента.
В соответствии с настоящим изобретением у такого инструмента передача силы осуществляется сначала от наклонной поверхности в плоскую поверхность, вследствие чего, при соответствующем исполнении, поверхность передачи силы увеличивается, и за счет этого уменьшается локальная нагрузка.
В этом месте следует заметить, что важно именно снижать пиковые нагрузки. Так как износ вплоть до разрушения инструмента возникает и прогрессирует именно вследствие описанных выше концентраций нагрузки, которые приводят к микротрещинам, путем снижения этих пиковых нагрузок удается достигать значительного продления срока службы инструмента и устройства для посадки инструмента.
По одному из предпочтительных вариантов осуществления есть по меньшей мере одна область выходной поверхности, для которой ни в какой точке поверхности нормальный вектор к этой точке поверхности не лежит на прямой, проходящей через выходную ось. То есть такая область выходной поверхности ни в одной точке поверхности не ориентирована в направлении выходной оси, а эта область выходной поверхности «повернута» относительно выходной оси.
Как уже указывалось, выходные поверхности предпочтительно выполнены по существу плоскими. Это означает, что выходные поверхности имеют плоскую область, имеющую по существу такую же касательную плоскость, однако они могут быть ограничены кромками, искривленными в одну сторону или в несколько сторон поверхностями и пр., или, соответственно, через кромки или через изогнутые области могут переходить в другие области устройства для посадки инструмента, в частности области передачи вращающего момента.
Преимущество плоских выходных поверхностей заключается в том, что благодаря этому может создаваться устройство для посадки инструмента и инструментальное устройство, которое, с одной стороны, закреплено на устройстве для посадки инструмента инструментальной машины, если оно выполнено соответствующим образом, без зазора, и у которых, при соответствующих допусках и свойствах материала, таких как упругость и пр., возможно поверхностное соприкосновение между устройством для посадки инструмента инструментальной машины и инструментальным устройством, благодаря чему увеличивается область передачи силы.
По другому предпочтительному варианту осуществления выходные поверхности по меньшей мере на отдельных участках искривлены. При этом кривизна может быть выполнена как в одном направлении, так и в двух направлениях, выпукло, вогнуто с постоянным или изменяющимся радиусом кривизны.
Искривленные поверхности могут быть также выполнены так, чтобы они вследствие приданной им формы и упругости материала обладали упругостью, благодаря которой кривизна изменяется и, в частности, благодаря которой эта кривизна, начиная с определенной нагрузки, по существу исчезает, т.е., следовательно, тогда имеется по существу плоская выходная поверхность. Также предпочтительно эти выходные поверхности инструментальной машины и соответствующие ответные области устройства для посадки инструмента сопрягаются друг с другом.
В одном из предпочтительных вариантов осуществления инструментальная машина, в частности устройство для посадки инструмента, имеет в области передачи вращающего момента по меньшей мере одну первую верхнюю ограничительную плоскость и по меньшей мере одну вторую нижнюю ограничительную плоскость. Причем эти ограничительные плоскости расположены по существу перпендикулярно упомянутой выходной оси. Также предпочтительно эти две ограничительные плоскости удалены друг от друга. Предпочтительно каждая из упомянутых областей выходных поверхностей расположена между одной из этих первых верхних ограничительных областей и одной из этих вторых нижних ограничительных областей, причем предпочтительно так, что область выходной поверхности касается соответствующей ограничительной плоскости, но не пересекает ее. В частности, благодаря расположению по меньшей мере одной области выходной поверхности между этими ограничительными плоскостями достижима особенно обширная область выходной поверхности, и нагрузка на эту область выходной поверхности является соответственно низкой. Предпочтительно первая группа областей выходных поверхностей, а по меньшей мере одна область выходной поверхности, расположена между одной из этих первых верхних ограничительных плоскостей и одной из этих вторых нижних ограничительных плоскостей, и также предпочтительно вторая группа областей выходных поверхностей расположена между другой первой верхней и другой второй нижней ограничительной плоскостью. В частности, благодаря группированию нескольких областей выходных поверхностей и распределению их соответственно ограничительным плоскостям, с одной стороны, обеспечена возможность простого изготовления области передачи вращающего момента, а с другой стороны, достижим особенно ровный ввод приводной силы в инструментальное устройство.
В одном из предпочтительных вариантов осуществления множество областей выходных поверхностей распространяется между одной единственной первой верхней и одной единственной второй нижней ограничительной плоскостью. Также предпочтительно все эти области выходных поверхностей распространяются между одной единственной первой верхней и одной единственной второй нижней ограничительной плоскостью. В частности, благодаря распространению этих областей выходных поверхностей между одной единственной первой верхней и одной единственной второй нижней ограничительной плоскостью достижима область передачи вращающего момента, занимающая небольшое конструктивное пространство и, кроме того, имеющая низкий необходимый расход материала. Также предпочтительно, в частности благодаря этому виду исполнения областей выходных поверхностей, обеспечивается возможность особенно равномерной и вместе с тем щадящей материал передачи приводных сил на инструментальное устройство, в частности благодаря этому разгружается область передачи вращающего момента и достижим долгий срок службы.
В одном из предпочтительных вариантов осуществления область передачи вращающего момента имеет множество областей выходных поверхностей. Предпочтительно это множество областей выходных поверхностей вращательно-симметрично расположено вокруг выходной оси.
«Вращательно-симметрично вокруг выходной оси» в смысле настоящей заявки должно означать, что множество областей выходных поверхностей путем вращения вокруг выходной оси по меньшей мере на угол, который больше 0° и меньше 360°, или же на каждый произвольный угол, если смотреть геометрически, переходит само в себя. В частности, один из этих углов составляет 360°/n, где n - натуральное число больше 1.
В частности, благодаря вращательно-симметричному расположению областей выходных поверхностей стало возможным сокращение дополнительных нагрузок на область передачи вращающего момента или, соответственно, равномерное нагружение областей выходных поверхностей и вместе с тем, в частности, достижение увеличенного срока службы.
В одном из предпочтительных вариантов осуществления по меньшей мере по две из этих областей выходных поверхностей расположены симметрично относительно некоторой плоскости симметрии. Предпочтительно эта плоскость симметрии совпадает с одной из упомянутых осевых плоскостей. Предпочтительно больше двух этих областей выходных поверхностей, предпочтительнее четыре, расположены симметрично относительно некоторой плоскости симметрии. Причем в этой плоскости симметрии лежит, в частности, выходная ось. Также предпочтительно эти области выходных поверхностей расположены по существу впритык друг к другу. При этом под расположением впритык друг к другу в смысле изобретения следует понимать, в частности, также такое расположение, когда области выходных поверхностей соединены друг с другом переходной областью. Предпочтительно такая переходная область может быть образована областью поверхности, проходящей искривленно или по меньшей мере на отдельных участках плоско. Также предпочтительно такая переходная область по касательной присоединяется по меньшей мере к одной, предпочтительнее к обеим этим областям выходных поверхностей. В частности, благодаря симметричному и также впритык друг к другу расположению областей выходных поверхностей достижима особенно высокая стабильность области передачи вращающего момента и вместе с тем хорошая передача силы на инструментальное устройство.
В одном из предпочтительных вариантов осуществления область передачи вращающего момента инструментальной машины имеет боковую стенку. Предпочтительно эта боковая стенка проходит радиально удаленно от выходной оси. Также предпочтительно эта боковая стенка проходит между первой верхней и второй нижней ограничительной плоскостью и предпочтительнее имеет изменяющуюся в направлении выходной оси толщину стенки, особенно предпочтительно по существу линейно возрастающую толщину стенки в направлении инструментальной машины. Предпочтительнее эта боковая стенка содержит эти области выходных поверхностей. В частности, благодаря этому исполнению области передачи вращающего момента, имеющей боковую стенку, возникает по существу полая коническая выемка внутри области передачи вращающего момента, однако эта полая коническая выемка имеет не круглое поперечное сечение, а поперечное сечение с изменяющимся расстоянием от боковой стенки до выходной оси в плоскости, ортогональной этой выходной оси. В частности, благодаря описанному виду исполнения области передачи вращающего момента достижима особенно стабильная область передачи вращающего момента и вместе с тем хороший ввод вращающего момента в инструментальное устройство.
В одном из предпочтительных вариантов осуществления эта боковая стенка проходит по существу радиально непрерывно вокруг выходной оси. В другом варианте осуществления боковая стенка по своему ходу вокруг выходной оси имеет выемки или, соответственно, прерывания. В частности, при непрерывно проходящей по окружности боковой стенке достижима особенно стабильная область передачи вращающего момента; при прерывающейся или имеющей выемки боковой стенке достижима, в частности, особенно легкая и имеющая низкий момент инерции область передачи вращающего момента.
В одном из предпочтительных вариантов осуществления один из нормальных векторов к одной из упомянутых касательных плоскостей ориентирован в радиальном направлении от выходной оси. Указываем на то, что в рамках этих пояснений термины «нормаль» и «нормальный вектор» используются равнозначно. Предпочтительно нормальные векторы нескольких, предпочтительнее всех этих касательных плоскостей в радиальном направлении ориентированы от выходной оси. В частности, благодаря этой ориентации касательной плоскости область передачи вращающего момента, в отличие от традиционного соединения вала и ступицы, представляет собой часть вала. Это исполнение области передачи вращающего момента предоставляет, в частности, возможность простого изготовления, или, соответственно, приводные силы могут особенно равномерно передаваться от инструментальной машины на инструментальное устройство.
В другом предпочтительном варианте осуществления один из нормальных векторов к одной из этих касательных плоскостей ориентирован в радиальном направлении к выходной оси. Предпочтительно нормальные векторы нескольких, предпочтительнее всех этих касательных плоскостей ориентированы в радиальном направлении к выходной оси. В частности, благодаря этой ориентации касательных плоскостей область передачи вращающего момента, в отличие от традиционного соединения вала и ступицы, представляет собой часть ступицы, иначе говоря, область передачи вращающего момента, в частности, по меньшей мере на отдельных участках, имеет выемку. При таком исполнении области передачи вращающего момента силы передаются от инструментальной машины на инструментальное устройство, в частности, через внутренние поверхности (часть ступицы), в частности такие поверхности хорошо защищены от загрязнения и повреждения.
В одном из предпочтительных вариантов осуществления между одной из этих касательных плоскостей и этой радиальной плоскостью, причем эта радиальная плоскость расположена перпендикулярно выходной оси, заключен угол α. Предпочтительно угол α выбран из определенного диапазона, при этом угол α предпочтительно меньше 90°, предпочтительнее меньше 80° и особенно предпочтительно меньше 75°, также предпочтительно угол α больше 0°, предпочтительнее больше 45° и особенно предпочтительно больше 60°. Также предпочтительно угол α находится в диапазоне от 62,5° до 72,5°. Предпочтительно угол α выбирается в вышеназванных диапазонах с учетом свойств конструктивных элементов (в частности, геометрии, толщины стенки, модуля упругости, прочности и тому подобного) области передачи вращающего момента и/или инструментального устройства, и/или предпочтительнее с учетом возникающих сил. В частности, благодаря описанному выше выбору угла α из названного диапазона, с одной стороны, достижима стабильная область передачи вращающего момента, а с другой стороны, равномерный ввод приводных сил в инструментальное устройство. Как правило, следует предпочитать выбор угла α меньше 70°, так как тогда опасность заклинивания меньше. При этом термин «заклинивание» следует толковать как невозможность запланированного извлечения инструментального устройства из инструментальной машины, то есть, в частности, невозможность без дополнительного силового воздействия. Эффекты, аналогичные этому «заклиниванию», известны в механике, в частности, как самоблокировка. Предпочтительно угол α, выбранный из названного диапазона (α>=70°), приводит к особенно малому занимаемому конструктивному пространству. Также предпочтительно благодаря меньшему углу α (α<70°) может уменьшаться эта склонность к заклиниванию инструментального устройства в этой области передачи вращающего момента. Особенно предпочтительным диапазоном угла α оказался диапазон около 60°(+/-5°), так как при этом достижимо относительно малое занимаемое конструктивное пространство и может уменьшаться или предотвращаться нежелательное заклинивание инструментального устройства.
В одном из предпочтительных вариантов осуществления между одной из упомянутых касательных плоскостей и упомянутой осевой плоскостью, причем в этой осевой плоскости лежит выходная ось, заключен угол β. Предпочтительно этот угол β выбран из определенного диапазона, при этом угол β предпочтительно меньше 90°, предпочтительнее меньше 70° и особенно предпочтительно меньше 65°, и также предпочтительно угол β больше 0°, предпочтительнее больше 15° и особенно предпочтительно больше 30°. Также предпочтительно угол β по существу равен 30°, 45° или 60°. Также предпочтительно угол β только незначительно отличается от одного из вышеназванных трех значений угла, при этом под «незначительно» предпочтительно следует понимать диапазон предпочтительно +/-7,5°, предпочтительнее +/-5° и особенно предпочтительно +/-2,5°. В частности, благодаря описанному выбору угла β из названного диапазона достижима особенно стабильная область передачи вращающего момента и вместе с тем равномерный ввод вращающего момента от инструментальной машины в инструментальное устройство. Передаваемый вращающий момент возрастает, в частности, с уменьшающимся углом β, предпочтительно угол β, в частности для расчетов, при которых на переднем плане стоит высокий передаваемый вращающий момент, выбирается из диапазона, для которого выполняется 0°<β<30°. Занимаемое конструктивное пространство уменьшается, в частности, с возрастающим углом β, предпочтительно угол β, в частности при расчетах, для которых на переднем плане стоит малое занимаемое конструктивное пространство, выбирается из диапазона, для которого выполняется 60°<β<90°. В одном из особенно предпочтительных вариантов осуществления, при котором, в частности, может передаваться высокий вращающий момент и возникает малое занимаемое конструктивное пространство, угол β составляет по существу 60°.
В одном из предпочтительных вариантов осуществления область передачи вращающего момента имеет четное количество областей выходных поверхностей. Предпочтительно область передачи вращающего момента имеет 4 или больше, предпочтительнее 8 или больше и особенно предпочтительно 16 или больше областей выходных поверхностей. Также предпочтительно область передачи вращающего момента имеет 64 или меньше, предпочтительнее 48 или меньше и особенно предпочтительно 32 или меньше областей выходных поверхностей. Также предпочтительно область передачи вращающего момента имеет нечетное количество областей выходных поверхностей, предпочтительнее четное количество областей выходных поверхностей. Предпочтительно количество областей выходных поверхностей зависит от размера области передачи вращающего момента. Также предпочтительно большие области передачи вращающего момента могут также иметь более высокие количества областей выходных поверхностей, чем указанные здесь. При этом под большой областью передачи вращающего момента следует, в частности, понимать область передачи вращающего момента, которая по существу имеет диаметр больше 50 мм или больше. Особенно предпочтительно область передачи вращающего момента имеет диаметр по существу 30 мм. Оказалось, что такой диаметр, в частности, у ручных инструментальных машин, имеющих осциллирующий привод, с одной стороны, имеет малое занимаемое конструктивное пространство, а с другой стороны, возможна надежная передача возникающих приводных сил. В частности, при четном количестве областей выходных поверхностей приводные силы могут попарно передаваться от инструментальной машины на инструментальное устройство. При этом оказалось, что, в частности, при этом попарном вводе приводных сил в инструментальное устройство достижима особенно долговечная и при этом усовершенствованная область передачи вращающего момента.
В одном из предпочтительных вариантов осуществления области выходных поверхностей расположены по существу звездообразно. Предпочтительно области выходных поверхностей расположены по существу звездообразно вокруг выходной оси. Также предпочтительно областями выходных поверхностей по меньшей мере на отдельных участках описывается трехмерное тело или, соответственно, трехмерная выемка; рассеченная плоскостью, ортогональной выходной оси, она имеет по существу поверхность основания звездообразного многоугольника.
Под термином «многоугольник» в смысле настоящего изобретения понимается не только математически точная форма, имеющая прямые, тупые или острые углы, но и форма, у которой углы закруглены.
Предпочтительно этот звездообразный многоугольник является вращательно-симметричным. Также предпочтительно эти звездообразно расположенные области выходных поверхностей выглядят подобно шлицевому валу традиционного соединения вала и ступицы, причем этот вал вследствие двойного наклона областей выходных поверхностей имеет коническую основную форму. В частности, вследствие звездообразного расположения этих областей выходных поверхностей обеспечена возможность расположения множества областей выходных поверхностей в небольшом конструктивном пространстве и, таким образом, надежной передачи больших приводных сил от инструментальной машины на инструментальное устройство.
В одном из предпочтительных вариантов осуществления инструментальная машина имеет кодирующее устройство или, соответственно, кодирующий элемент. Предпочтительно такое кодирующее устройство имеет некоторую поверхность поперечного сечения, предпочтительнее эта поверхность поперечного сечения расположена в плоскости, которая расположена по существу ортогонально упомянутой выходной оси. Предпочтительно это кодирующее устройство имеет осевую протяженность, по существу ортогональную этой поверхности поперечного сечения и вместе с тем, в частности, параллельную этой выходной оси. В частности, благодаря этой осевой протяженности и ее ориентации обеспечена возможность особенно хорошего взаимодействия кодирующего устройства инструментального устройства с этим кодирующим устройством инструментальной машины, и благодаря этому особенно надежной посадки инструментального устройства на инструментальной машине.
В одном из предпочтительных вариантов осуществления одно из этих кодирующих устройств расположено вращательно-симметрично относительно упомянутой выходной оси, и вместе с тем, в частности, также относительно упомянутой оси вращения инструмента. Предпочтительно несколько этих кодирующих устройств расположены вращательно-симметрично относительно этой выходной оси. Предпочтительно эти кодирующие устройства смещены вокруг выходной оси на жестко заданные угловые шаги, также предпочтительно на одном общем делительном диаметре. Предпочтительнее угловой шаг имеет величину 1°, 2,5°, 10°, 15°, 22,5°, 30° или 45°, также предпочтительно равен целому кратному такого углового шага, также предпочтительно эти кодирующие устройства смещены на равноотстоящие угловые шаги, также предпочтительно кодирующие устройства смещены на полной окружности 360° на равноотстоящие угловые шаги, предпочтительнее 2 раза по 180°, 3 раза по 120°, 4 раза по 90°, 5 раз по 72°, 6 раз по 60°, 8 раз по 45°, 9 раз по 40°, 12 раз по 30° или 16 раз по 22,5° или тому подобное. В частности, благодаря этому распределению кодирующих устройств обеспечена возможность смещения инструментального устройства в соответствии с данными угловыми шагами вокруг выходной оси и повторной надежной посадки, причем тем самым обеспечена возможность особенно надежной посадки инструментального устройства и, в частности, быстрого вставления инструментального устройства в инструментальную машину.
В одном из предпочтительных вариантов осуществления кодирующее устройство, в частности поверхность поперечного сечения по меньшей мере одного кодирующего устройства, выбрана из определенной группы геометрических форм. Причем эта группа предпочтительно включает в себя:
- многоугольник, имеющий множество углов, предпочтительнее 3, 4, 5, 6, 7, 8, 9, 10 или больше,
- круг,
- эллипс,
- сплайн,
- основную форму, включающую в себя несколько прямых, которые соединены друг с другом дугами,
или комбинацию из нескольких вышеназванных элементов.
В частности, кодирующее устройство инструментальной машины имеет форму, зеркально-симметричную форме кодирующего устройства на инструментальном устройстве, чтобы предпочтительно взаимодействовать с ним (принцип паза и шпонки).
В одном из предпочтительных вариантов осуществления удерживающее устройство выбрано из группы удерживающих устройств, которая обеспечивает возможность надежного крепления инструментального устройства на инструментальной машине. Предпочтительно возможность такого надежного крепления обеспечивают удерживающие устройства, посредством которых опосредствованно или непосредственно может создаваться соединение с силовым или с геометрическим замыканием между инструментальным устройством и инструментальной машиной. Такая группа удерживающих устройств имеет по меньшей мере одно из следующих устройств или комбинацию, включающую в себя два или несколько этих устройств:
- винтовое устройство,
- стяжное болтовое устройство,
- крюковое устройство,
- клипсовое устройство,
- запорное защелкивающее устройство,
- байонетное затворное устройство,
- устройство, имеющее стопорные выступы,
- устройство, имеющее сферические запорные участки, в частности полусферические выемки
или тому подобные.
При этом под винтовым устройством следует понимать предпочтительно устройство, которое имеет одну или несколько резьбовых областей, также предпочтительно по меньшей мере одну винтовую часть и одну гаечную часть. Под стяжным болтовым устройством следует предпочтительно понимать устройство, которое может нагружаться удерживающей силой по некоторой, предпочтительно продольной, оси, и воздействует с этой удерживающей силой на инструментальное устройство. Предпочтительно стяжное болтовое устройство имеет по меньшей мере одну стягивающую область, в которой к стяжному болтовому устройству может прикладываться удерживающая сила, передаточную область и удерживающую область. Предпочтительно стяжное болтовое устройство этой удерживающей областью опосредствованно или непосредственно воздействует на инструментальное устройство и также предпочтительно с помощью этой передаточной области удерживающая сила передается от этой стягивающей области на эту удерживающую область.
Также предпочтительно под крюковым устройством следует понимать вращающееся, поворотное или смещаемое устройство, которое имеет эффективную поверхность для передачи действия удерживающей силы на инструментальное устройство.
Также предпочтительно под клипсовым устройством следует понимать устройство, которое предпочтительно обладает возможностью движения против действия силы упругости. Предпочтительно клипсовое устройство имеет первое напряженное и второе ненапряженное или частично напряженное рабочее состояние. Предпочтительно клипсовое устройство, когда в инструментальной машине не посажено инструментальное устройство, находится в этом ненапряженном или напряженном состоянии. Также предпочтительно клипсовое устройство, когда в инструментальной машине посажено инструментальное устройство, находится в ненапряженном или частично напряженном состоянии и предпочтительно опосредствованно или непосредственно создает соединение с геометрическим замыканием между инструментальным устройством и инструментальной машиной.
Также предпочтительно под запорным защелкивающим устройством следует понимать устройство, которое с помощью по меньшей мере одного или предпочтительно нескольких запорных защелкивающих элементов препятствует движению инструментального устройства по меньшей мере в одном направлении относительно инструментальной машины посредством соединения с геометрическим замыканием, при этом такие запорные защелкивающие элементы оперты подвижным образом.
Также предпочтительно под байонетным затворным устройством следует понимать устройство, которое имеет по меньшей мере один, предпочтительно несколько элементов геометрического замыкания. Предпочтительно такие элементы геометрического замыкания взаимодействуют с ответными поверхностями, причем предпочтительно эти ответные поверхности или элементы геометрического замыкания расположены опосредствованно или непосредственно на инструментальном устройстве, а соответственно другие участки (ответные поверхности, элементы геометрического замыкания) - на инструментальной машине. Также предпочтительно под устройством, имеющим стопорные выступы, следует понимать устройство, которое опосредствованно или непосредственно создает соединение с геометрическим замыканием между инструментальным устройством и инструментальной машиной.
Также предпочтительно под устройством, имеющим сферические запорные участки, следует понимать устройство, которое имеет по меньшей мере одну сферическую область или по меньшей мере один шарик и один запорный участок, с которым может сцепляться эта сферическая область или этот шарик. Предпочтительно по меньшей мере один из этих запорных участков имеет призматическую, цилиндрическую или полусферическую область для сцепления со сферической областью или шариком. Причем путем этого сцепления опосредствованно или непосредственно может создаваться соединение с геометрическим замыканием между инструментальным устройством и инструментальной машиной.
Система инструментальной машины, или, соответственно, обрабатывающая система, имеет предлагаемую изобретением инструментальную машину и по меньшей мере одно инструментальное устройство для применения с этой инструментальной машиной. При этом удерживающее устройство имеет по меньшей мере одну эффективную поверхность для передачи силового воздействия на инструментальное устройство. Эта эффективная поверхность предпочтительно расположена на обращенной к инструментальной машине стороне удерживающего устройства. Также предпочтительно удерживающее устройство имеет ограничительную поверхность удерживающего устройства. Эта ограничительная поверхность удерживающего устройства расположена на отвернутой от инструментальной машины стороне удерживающего устройства. Предпочтительно эффективная поверхность удерживающего устройства предназначена для того, чтобы передавать удерживающую силу на инструментальное устройство. Предпочтительнее ограничительная поверхность удерживающего устройства расположена по существу напротив этой эффективной поверхности.
Инструментальное устройство имеет присоединительную область инструмента и ось вращения инструмента. Причем эта присоединительная область инструмента имеет по меньшей мере одну боковую стенку. Эта присоединительная область инструмента распространяется в осевом направлении между первой и второй ортогональной плоскостью, по меньшей мере одна компонента протяженности присоединительной области инструмента указывает в направлении оси вращения инструмента. При этом такая ортогональная плоскость расположена, в частности, ортогонально оси вращения инструмента. Также предпочтительно эта боковая стенка удалена радиально от этой оси вращения инструмента и имеет некоторую осевую протяженность в направлении оси вращения инструмента. Также предпочтительно эта боковая стенка проходит радиально непрерывно, или предпочтительнее с прерыванием, или имеет выемки вокруг этой оси вращения инструмента.
С помощью этого удерживающего устройства на инструментальное устройство, когда оно посажено в инструментальной машине, в области эффективной поверхности этого удерживающего устройства оказывается силовое воздействие, в частности действие удерживающей силы, которая удерживает инструментальное устройство на инструментальной машине. Это силовое воздействие, в частности действие удерживающей силы, имеет по меньшей мере одну компоненту в направлении оси вращения инструмента, предпочтительно эта компонента силового воздействия по существу параллельна ей.
В одном из предпочтительных вариантов осуществления ограничительная поверхность удерживающего устройства и эффективная поверхность удерживающего устройства расположены между первой и второй ортогональной плоскостью этой присоединительной области инструмента, когда инструментальное устройство посажено на инструментальной машине. Также предпочтительно ограничительная поверхность удерживающего устройства и эффективная поверхность удерживающего устройства расположены в осевом направлении в пределах осевой протяженности областей приводных поверхностей инструмента, когда инструментальное устройство посажено на инструментальной машине. Предпочтительно присоединительная область инструмента образует кольцевую конфигурацию, предпочтительнее коническую конфигурацию, также предпочтительно эффективная поверхность, предпочтительно одного, предпочтительнее всех удерживающих устройств расположена в радиальном и осевом направлении внутри этой конфигурации, когда инструментальное устройство посажено на инструментальной машине. В частности, благодаря такому исполнению инструментального устройства и инструментальной машины обеспечена возможность, чтобы удерживающее устройство не выдавалось в осевом направлении за инструментальное устройство, при этом обеспечена возможность особенно надежной эксплуатации системы инструментальной машины.
В одном из предпочтительных вариантов осуществления боковая стенка инструментального устройства содержит области приводных поверхностей инструмента. Предпочтительно эти области приводных поверхностей распространяются в радиальном направлении по меньшей мере на отдельных участках между первым и вторым радиальным расстоянием от этой оси вращения инструмента. Также предпочтительно по меньшей мере одна из этих областей предназначена для передачи вращающего момента или, соответственно, для передачи приводной силы от инструментальной машины на инструментальное устройство. Также предпочтительно область передачи вращающего момента инструментальной машины по меньшей мере на отдельных участках проходит геометрически сопряженным образом с этими областями приводных поверхностей инструмента. В частности, благодаря этим радиальным протяженностям областей приводных поверхностей инструмента обеспечена возможность передачи приводной силы с геометрическим замыканием и вместе с тем особенно надежный вид передачи приводной силы от инструментальной машины на инструментальное устройство.
В одном из предпочтительных вариантов осуществления боковая стенка инструментального устройства содержит области приводных поверхностей инструмента. Предпочтительно боковая стенка по меньшей мере на отдельных участках проходит сопряженно с областями выходных поверхностей области передачи вращающего момента. Также предпочтительно одна, предпочтительнее несколько, особенно предпочтительно все эти области приводных поверхностей инструмента по меньшей мере на отдельных участках контактируют с этими областями выходных поверхностей в виде точечного соприкосновения, предпочтительнее в виде линейного соприкосновения и особенно предпочтительно в виде поверхностного соприкосновения. В частности, посредством точечного соприкосновения обеспечена возможность особенно простого позиционирования инструментального устройства относительно инструментальной машины; в частности, посредством поверхностного соприкосновения обеспечена возможность передачи более высоких приводных сил по сравнению с точечным соприкосновением; в частности, посредством поверхностного соприкосновения обеспечена возможность передачи более высоких приводных сил по сравнению с линейным соприкосновением. В частности, при линейном или точечном соприкосновении обеспечена возможность упругой деформации области выходной поверхности или области приводной поверхности инструмента, так что несколько областей приводных/выходных поверхностей могут контактировать друг с другом, и возможна передача более высокой приводной силы.
Приведенные ниже фигуры показывают разные признаки и варианты осуществления изобретения и частично схематизированы, при этом возможна также комбинация отдельных признаков и вариантов осуществления, выходящая за рамки этих фигур.
Фиг.1: вид сбоку (фиг.1a) и вид в плане (фиг.1b) области передачи вращающего момента, имеющей две области выходных поверхностей;
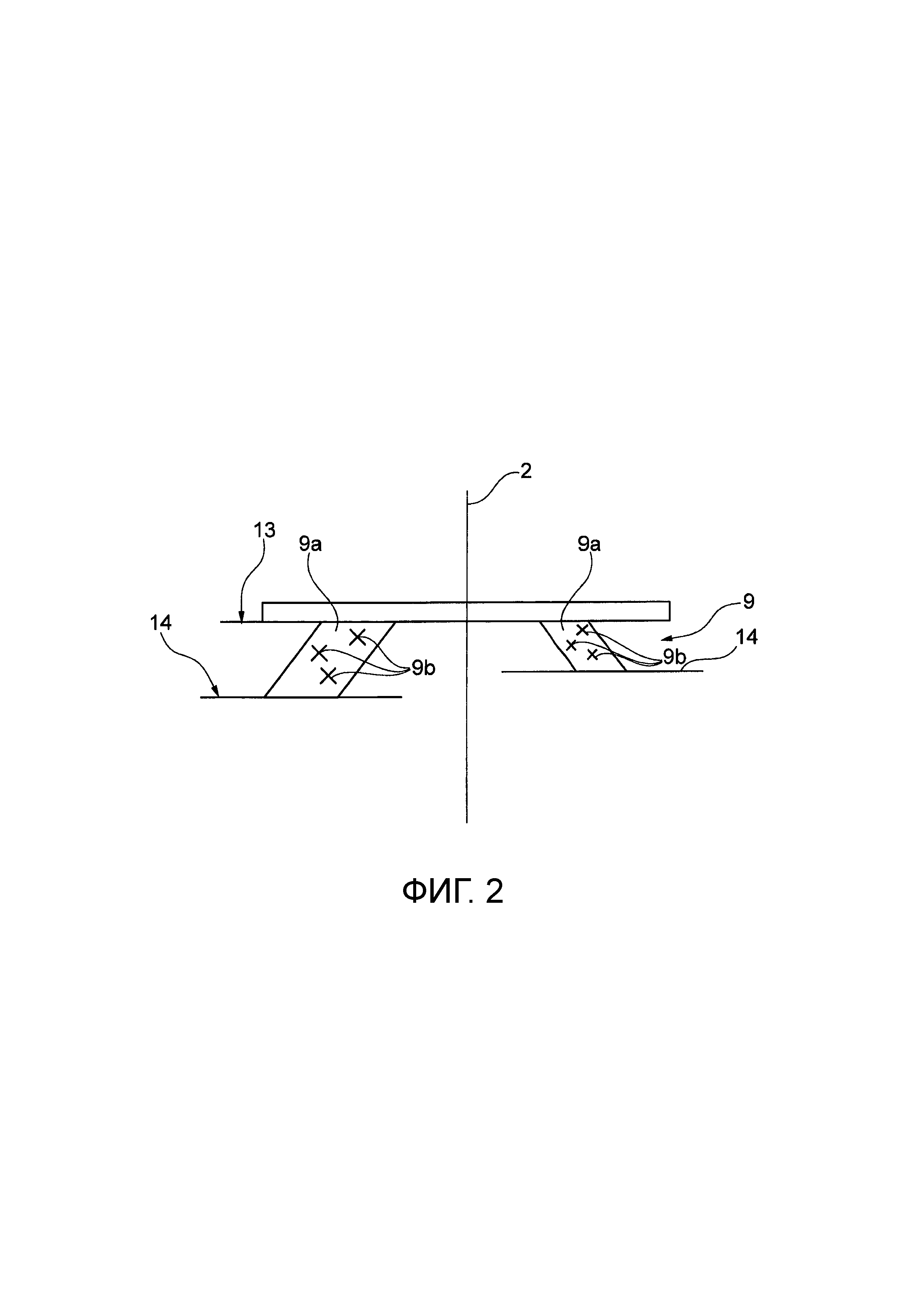
фиг.2: вид сбоку области передачи вращающего момента, имеющей области выходных поверхностей, которые распространяются между ограничительными плоскостями;
фиг.3: вид в плане (фиг.3a) и вид сбоку (фиг.3b) области передачи вращающего момента, имеющей соответственно две области выходных поверхностей, которые расположены впритык друг к другу;
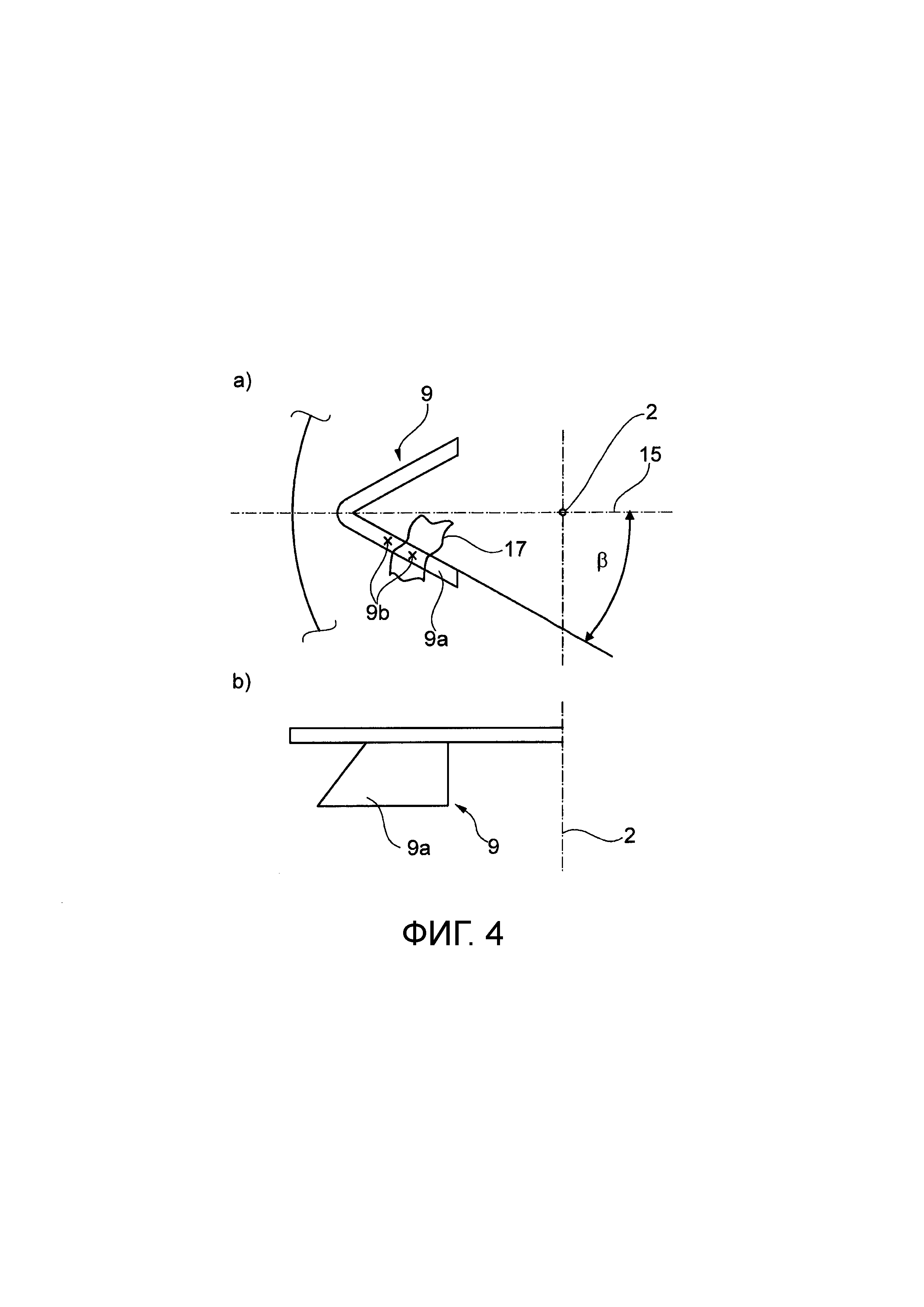
фиг.4: вид в плане (фиг.4a) и вид сбоку (фиг.4b) фрагмента области передачи вращающего момента и наклон области выходной поверхности на угол β;
фиг.5: изображение сечения области передачи вращающего момента и наклон области выходной поверхности на угол α;
фиг.6: изображение в перспективе области передачи вращающего момента, имеющей звездообразное расположение областей выходных поверхностей вокруг выходной оси;
фиг.7: вид в плане (фиг.7a) и вид сбоку (фиг.7b) области передачи вращающего момента, имеющей звездообразное расположение областей выходных поверхностей;
фиг.8: два изображения сечений областей передачи вращающего момента, имеющих различные кодирующие устройства;
фиг.9: изображение сечения системы инструментальной машины;
фиг.10: вид в плане прохождения боковой стенки инструментального устройства, который содержит области приводных поверхностей инструмента;
фиг.11: изображения в перспективе областей соприкосновения (фиг.11a - точечное соприкосновение; фиг.11b - линейное соприкосновение; фиг.11c - поверхностное соприкосновение) между областями выходных поверхностей и областями приводных поверхностей инструмента;
фиг.12: изображения в перспективе различно искривленных областей выходных поверхностей;
фиг.13: изображение сечения инструментального устройства, которое удерживается на инструментальной машине посредством винтового устройства;
фиг.14: изображение сечения инструментального устройства, которое удерживается на инструментальной машине посредством стяжного болтового устройства и гаечной части;
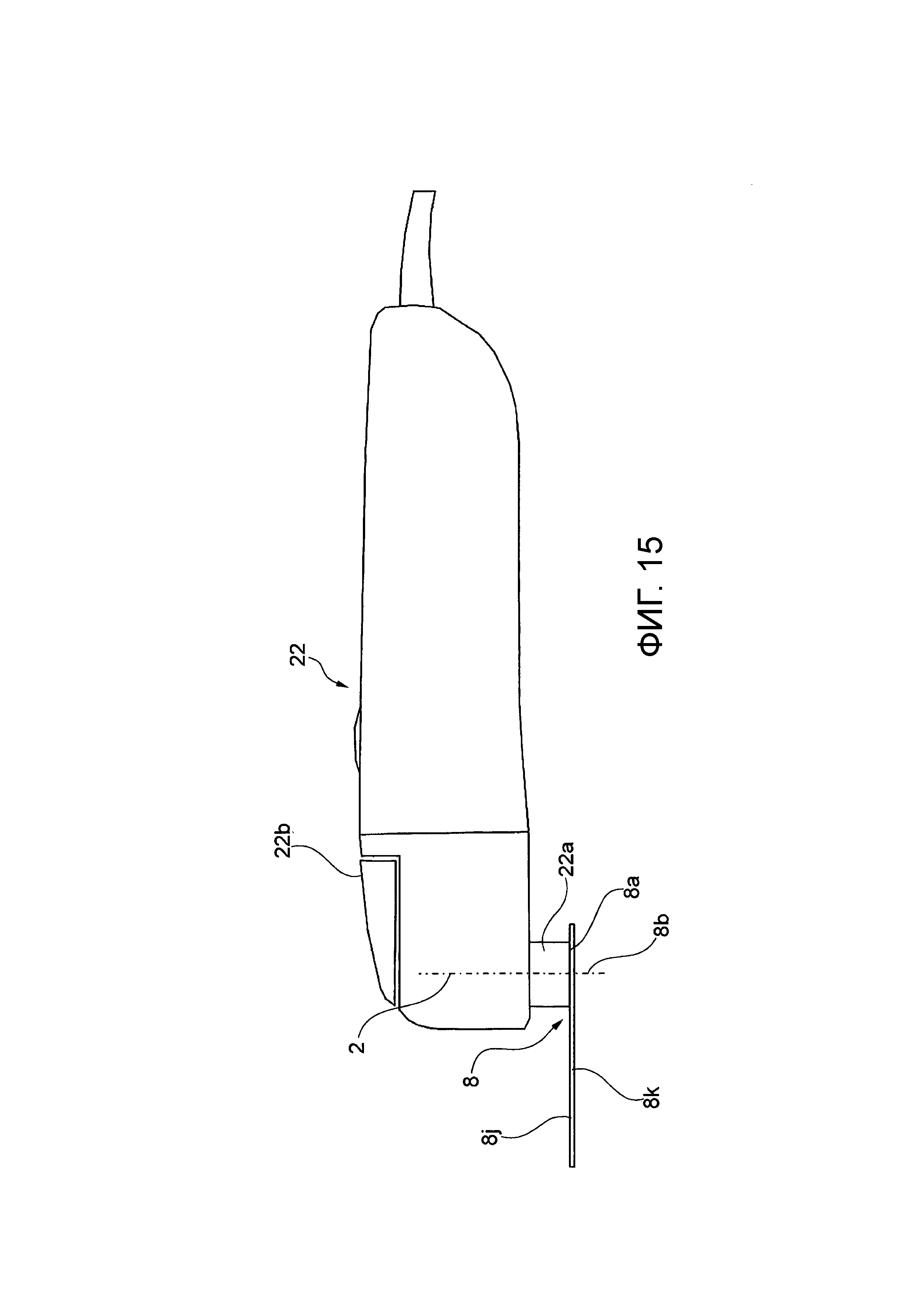
фиг.15: вид сбоку инструментальной машины, имеющей инструментальное устройство;
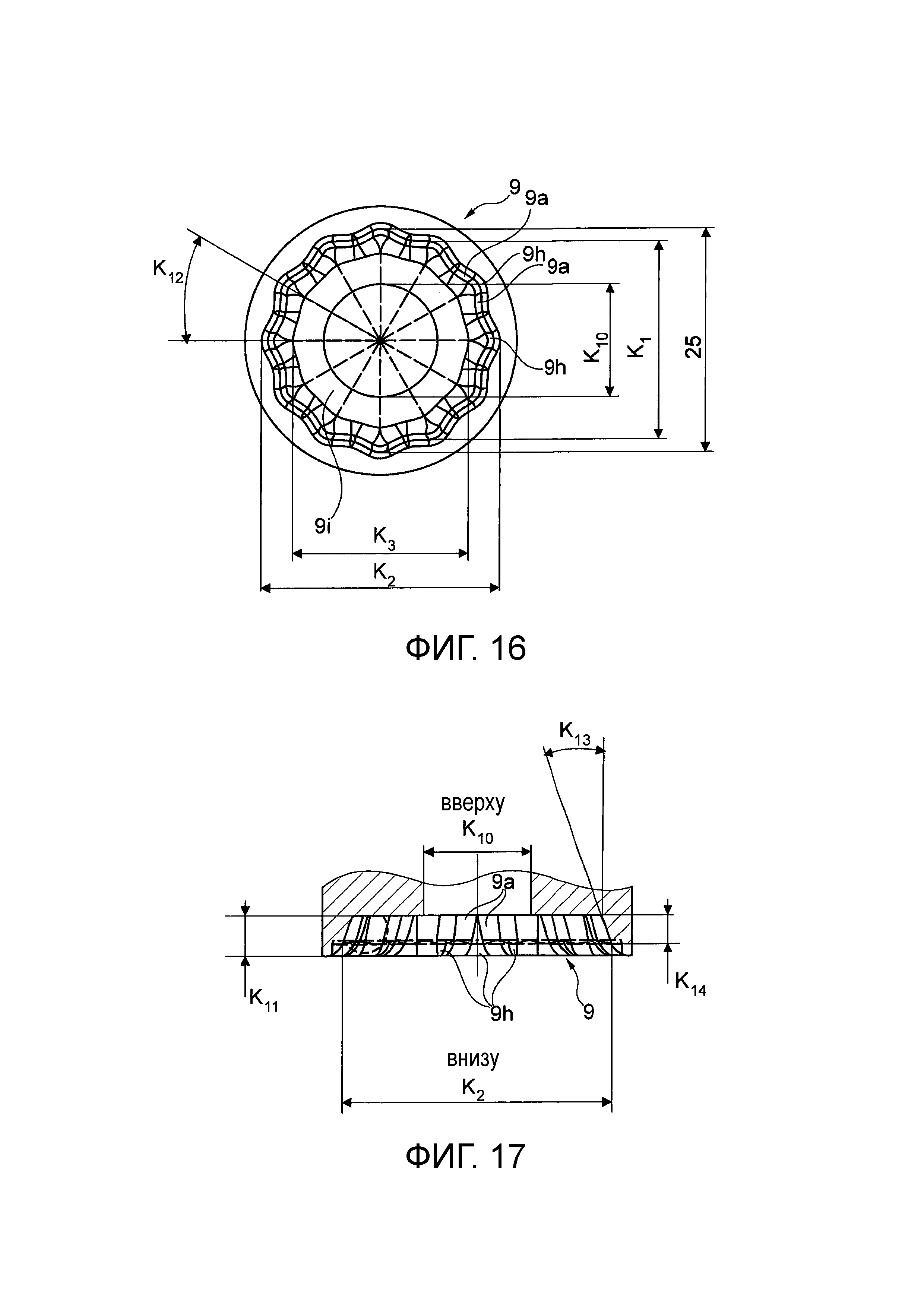
фиг.16: вид в плане (снизу) одного из вариантов осуществления области передачи вращающего момента инструментальной машины;
фиг.17: изображение сечения одного из вариантов осуществления области передачи вращающего момента инструментальной машины.
На фиг.1 показаны два вида области 9 передачи вращающего момента устройства для посадки инструмента (фиг.1a - вид спереди, фиг.1b - вид в плане). Эта область 9 передачи вращающего момента имеет две области 9a выходных поверхностей, на каждой из которых изображены множество точек 9b поверхности. Область 9 передачи вращающего момента предназначена для того, чтобы передавать приводные силы от инструментальной машины на инструментальное устройство (не изображено). Инструментальная машина приводит инструментальное устройство во вращательно-осциллирующее движение, при этом инструментальное устройство осциллирует вокруг выходной оси 2, которая по существу совпадает с осью вращения инструмента. Выходная ось 2 представляет собой фиктивную геометрическую ось.
На фиг.2 показана область 9 передачи вращающего момента инструментальной машины, она предназначена для того, чтобы передавать приводные силы от инструментальной машины на инструментальное устройство (не изображено). Область 9 передачи вращающего момента имеет две области 9a выходных поверхностей. На каждой области 9a выходных поверхностей изображено множество точек 9b поверхности. Области 9a выходных поверхностей распространяются каждая между верхней ограничительной плоскостью 13 и нижней ограничительной плоскостью 14, причем верхние ограничительные плоскости совпадают в ограничительной плоскости 13. Ограничительные плоскости 13/14 расположены ортогонально выходной оси 2. Посредством инструментальной машины инструментальное устройство (не изображено) приводится во вращательно-осциллирующее движение вокруг выходной оси 2.
На фиг.3 показано два вида одной области 9 передачи вращающего момента инструментальной машины (фиг.3a - вид в плане, фиг.3b - вид спереди). Участок 9 передачи вращающего момента предусмотрен для того, чтобы передавать приводные силы от инструментальной машины на инструментальное устройство (не изображено), инструментальное устройство приводится во вращательно-осциллирующее движение вокруг выходной оси 2. Каждые две области 9a выходных поверхностей расположены впритык друг к другу, и несколько этих областей 9a выходных поверхностей расположены вращательно-симметрично вокруг выходной оси 2. Выходная ось 3 представляет собой фиктивную геометрическую ось. Области 9a выходных поверхностей распространяются между одной единственной верхней 13 и одной единственной нижней 14 ограничительной плоскостью. Каждые две области 9a выходных поверхностей соединены с двумя другими областями 9a выходных поверхностей посредством соединительной области 9c. Благодаря расположению областей 9a выходных поверхностей впритык друг к другу они могут опираться друг на друга, и обеспечена возможность особенно стабильной области 9 передачи вращающего момента. Благодаря вращательно-симметричному расположению областей 9a выходных поверхностей обеспечена возможность смещения инструментального устройства дискретными шагами вокруг выходной оси, при этом обеспечена возможность гибкого использования инструментальной машины.
На фиг.4 изображены два вида одного фрагмента области 9 передачи вращающего момента инструментальной машины (фиг.4a - вид в плане, фиг.4b - вид спереди). Осевая плоскость 15 включает в себя выходную ось 2. Касательная плоскость 17 касается области 9a выходной поверхности в точке 9b поверхности. Касательная плоскость заключает с осевой плоскостью 15 острый угол β.
На фиг.5 приведено изображение сечения области 9 передачи вращающего момента инструментальной машины. Область 9 передачи вращающего момента имеет множество областей 9a выходных поверхностей. Касательная плоскость 17 касается одной из этих областей 9a выходных поверхностей в точке 9b поверхности. Ортогонально выходной оси 2 расположена радиальная плоскость 16. Радиальная плоскость 16 заключает с касательной плоскостью 17 острый угол α.
На фиг.6 показано устройство 1 для посадки инструмента в трехмерном изображении. Область 9 передачи вращающего момента имеет множество областей 9a выходных поверхностей. Эти области 9a выходных поверхностей расположены вращательно-симметрично, звездообразно вокруг выходной оси 2. Инструментальное устройство (не изображено) может удерживаться на инструментальной машине посредством крюковых устройств 4a/b. Области 9a выходных поверхностей расположены при этом так, что нормаль 18 к поверхности одной из этих областей 9a выходных поверхностей указывает в направлении выходной оси 2. Отсюда получается, что область 9 передачи вращающего момента выполнена по существу в виде выемки, имеющей звездообразный профиль. Области 9a выходных поверхностей расположены впритык друг к другу и проходят радиально непрерывно вокруг выходной оси 2. Благодаря этому расположению становится возможной особенно стабильная область 9 передачи вращающего момента, которая позволяет равномерно вводить приводные силы от инструментальной машины в инструментальное устройство (не изображено).
На фиг.7 показана область 9 передачи вращающего момента устройства для посадки инструмента ручной инструментальной машины, при этом на фиг.7a изображен вид в плане, а на фиг.7b - вид спереди этого устройства для посадки инструмента. Инструментальное устройство (не изображено) может удерживаться на области 9 передачи вращающего момента посредством крюковых устройств 4a/b. Для этого крюковые устройства 4a/b обладают возможностью движения в противоположном направлении. Область 9 передачи вращающего момента имеет множество областей 9a выходных поверхностей, они расположены, радиально непрерывно проходя вокруг выходной оси и звездообразно. Нормаль 18 к поверхности одной из этих областей 9a выходных поверхностей ориентирована от выходной оси 2. Благодаря такому расположению областей 9a выходных поверхностей достижимо особенно простое устройство для посадки инструмента.
На фиг.8 показаны два частичных изображения сечений областей 9 передачи вращающего момента устройства для посадки инструмента ручной инструментальной машины, причем на этой фигуре изображены разные кодирующие устройства 19. На фиг.8a показана область 9 передачи вращающего момента, имеющая множество областей 9a выходных поверхностей. Области 9a выходных поверхностей звездообразно расположены вокруг выходной оси 2 и радиально удалены от нее. В области выходной оси 2 расположено кодирующее устройство 19a в виде возвышенного участка, причем это кодирующее устройство 19a предназначено для того, чтобы сцепляться с выемкой в инструментальном устройстве (не изображено). Кодирующее устройство 19a является круглым и расположено вращательно-симметрично относительно выходной оси 2. На фиг.8b показана область 9 передачи вращающего момента, имеющая множество областей 9a выходных поверхностей. Области 9a выходных поверхностей звездообразно расположены вокруг выходной оси 2 и радиально удалены от нее. В области выходной оси 2 расположено кодирующее устройство 19b в виде выемки, причем это кодирующее устройство 19b предназначено для того, чтобы с ним сцеплялся возвышенный участок на инструментальном устройстве (не изображено).
На фиг.9 показана система инструментальной машины или, соответственно, обрабатывающая система, имеющая устройство 1 для посадки инструмента и инструментальное устройство 8. Инструментальное устройство 8 посажено в устройстве 1 для посадки инструмента так, что выходная ось 2 и фиктивная геометрическая ось 8b вращения инструмента совпадают. Инструментальное устройство 8 имеет присоединительную область 8a инструмента, она распространяется между первой 8c и второй 8d ортогональной плоскостью. Область 8f приводной поверхности инструмента расположена между первой и второй ортогональной плоскостью 8c/d. Первая ортогональная плоскость 8c ограничивает присоединительную область 8a инструмента на обращенной к инструментальной машине стороне в направлении оси 8b вращения инструмента, вторая ортогональная плоскость 8d ограничивает присоединительную область 8a инструмента на отвернутой от инструментальной машины стороне. Область 8f приводной поверхности инструмента предусмотрена для передачи приводных сил от инструментальной машины на инструментальное устройство 8 и распространяется в осевом направлении в области 8g. Для этого область 8f приводной поверхности инструмента имеет по меньшей мере на отдельных участках негативную форму области 9a выходной поверхности и при этом обеспечивает возможность соединения с геометрическим замыканием между инструментальным устройством 8 и устройством 1 для посадки инструмента. Инструментальное устройство 8 имеет кодирующее устройство 8e инструмента, его пронзают первое и второе крюковое устройство 4a/b удерживающего устройства 4. Крюковые устройства 4a/b в области эффективных поверхностей 4c оказывают удерживающее силовое воздействие 4h на инструментальное устройство 8. Инструментальное устройство 8 посредством этих удерживающих силовых воздействий 4h удерживается на инструментальной машине. Благодаря двойному наклону на угол α и β (не изображено) областей 9a выходных поверхностей области 9 передачи вращающего момента инструментальное устройство 8 без зазора удерживается в устройстве 1 для посадки инструмента. Удерживающие силовые воздействия 4h передаются опосредствованно с помощью зажимного устройства 3. Крюковые устройства 4a/b удерживающего устройства 4 оперты с возможностью вращения вокруг точки 4d вращения крюка. Зажимное устройство 3 посредством подвижного элемента 6 контактирует с удерживающим устройством 4. Благодаря исполнению направляющей выемки 5e сумма удерживающих силовых воздействий 4h соответственно зажимной силе 3a увеличивается, и обеспечивается возможность особенно надежного удерживания инструментального устройства 8 в устройстве 1 для посадки инструмента.
На фиг.10 показано прохождение боковой стенки 8i инструмента, при этом они содержат области 8f приводных поверхностей инструмента. Области 8f приводных поверхностей инструмента расположены звездообразно вокруг оси 8b вращения инструмента и на отдельных участках расположены сопряженно с областями 9a выходных поверхностей области передачи вращающего момента (не изображено). Боковая стенка 8i инструмента проходит внутри областей 8f приводных поверхностей инструмента между первым расстоянием r1 и вторым расстоянием r2 от оси 8b вращения инструмента. Области 8f приводных поверхностей инструмента имеют, в свою очередь, точки 8h поверхности инструмента. Благодаря сопряженному с областями 9a выходных поверхностей области передачи вращающего момента (не изображено) прохождению областей 8f приводных поверхностей инструмента обеспечена возможность передачи с геометрическим замыканием приводных сил от инструментальной машины на инструментальное устройство 8, при этом могут надежно передаваться особенно большие приводные силы.
На фиг.11 показаны разные области 20a, 20b, 20c соприкосновения между областью 8f приводной поверхности инструмента и областью 9a выходной поверхности области 9 передачи вращающего момента. При этом форма и вид областей 20a, 20b, 20c соприкосновения зависит от формы обеих областей 8f/9a приводной/выходной поверхности и их взаимодействия. На фиг.11a показана точечная область 20a соприкосновения, причем эта область 20a соприкосновения имеет круглую или эллиптическую протяженность. Точечная область 20a соприкосновения особенно нечувствительна по отношению к неточному позиционированию инструментального устройства относительно инструментальной машины, которое может обусловливаться допусками при изготовлении инструментального устройства. На фиг.11b показана линейная область 20b соприкосновения, причем эта область 20b соприкосновения имеет по линии 21 соприкосновения большую протяженность, а поперек к ней - малую протяженность. Линейная область 20b соприкосновения предоставляет контактную поверхность большего размера по сравнению с точечной областью 20a соприкосновения, и от инструментальной машины на инструментальное устройство могут передаваться более высокие приводные силы. На фиг.11c показана поверхностная область 20c соприкосновения. Поверхностная область 20c соприкосновения предоставляет контактную поверхность большего размера по сравнению с линейной областью 20b соприкосновения, и поэтому от инструментальной машины на инструментальное устройство могут передаваться более высокие приводные силы. По сравнению с точечным соприкосновением 20a линейное 20b и поверхностное 20c соприкосновение требуют более высокой точности, как при изготовлении областей 8f/9a приводных/выходных поверхностей, так и при позиционировании инструментального устройства на инструментальной машине. Области 9a выходных поверхностей и области 8f приводных поверхностей инструмента могут быть согласованы друг с другом так, чтобы поверхностное (фиг.11c) или линейное (фиг.11b) соприкосновение устанавливалось только при передаче значительных приводных сил, например, при эксплуатации инструментальной машины с номинальной мощностью.
На фиг.12 показаны различные фрагменты области 9a выходной поверхности. Не изображена плоская область выходной поверхности, она представляет собой другой предпочтительный вариант осуществления. На фиг.12a показан искривленный в одном направлении участок области 9a выходной поверхности. Этот участок области 9a выходной поверхности может описываться посредством прямых линий a координатной сетки и искривленных линий bI координатной сетки. Искривленные линии bI координатной сетки имеют постоянный радиус RI кривизны. Такая область 9a выходной поверхности соответствует на отдельных участках боковой поверхности цилиндра; если предусмотрены несколько различных радиусов RI кривизны, она соответствует боковой поверхности конуса (не изображено). При этом величина радиуса RI кривизны может быть выбрана так, чтобы область 9a выходной поверхности при передаче приводных сил на отдельных участках изменялась, превращаясь в плоскость, или сопрягалась с ответной поверхностью (не изображено), то есть областью 8f выходной поверхности инструмента, с которой она взаимодействует для передачи приводных сил. На фиг.12b показан участок области 9a выходной поверхности, имеющий кривизну в двух направлениях. Этот участок области 9a выходной поверхности может описываться посредством искривленных линий bI координатной сетки и искривленных линий bII координатной сетки. Линии bI координатной сетки имеют постоянный радиус RI кривизны, а линии bII координатной сетки имеют постоянный радиус RII кривизны. Такая область 9a выходной поверхности, в том особом случае, когда первый радиус RI кривизны и второй радиус RII кривизны равны, соответствует сферической поверхности. На фиг.12b изображена область 9a выходной поверхности, имеющая различные радиусы RI и RII кривизны. При этом величина радиусов RI и RII кривизны может быть выбрана так, чтобы область 9a выходной поверхности при передаче приводных сил по меньшей мере на отдельных участках изменялась, превращаясь в плоскость, или сопрягалась с областью 8f выходной поверхности инструмента (не изображено), с которой она взаимодействует для передачи приводных сил. На фиг.12c показан участок области 9a выходной поверхности, имеющий кривизну в двух направлениях. Этот участок области 9a выходной поверхности может описываться посредством линий bI координатной сетки, имеющих постоянный радиус RI кривизны, и линий bIa координатной сетки, имеющих изменяющийся радиус RIa кривизны. При такой области 9a выходной поверхности все линии координатной сетки могут также иметь изменяющийся радиус кривизны (не изображено). Величина радиусов RIa и RII кривизны может быть выбрана так, чтобы область 9a выходной поверхности при передаче приводных сил по меньшей мере на отдельных участках изменялась, превращаясь в плоскость, или сопрягалась с областью 8f выходной поверхности инструмента (не изображено), с которой она взаимодействует для передачи приводных сил. На фиг.12 изображены вогнуто искривленные области 9a выходных поверхностей; изложенные рассуждения могут соответственно переноситься на выпукло искривленные области выходных поверхностей. Предпочтительно выбирается вогнуто-выпуклое соединение пар областей 8f выходных поверхностей инструмента и областей 8f выходных поверхностей или выпукло-вогнутое, так как при этом могут передаваться большие приводные силы, или выпукло-выпуклое, или плоско-выпуклое соединение пар, так как при этом обеспечена возможность простого позиционирования инструментального устройства.
На фиг.13 показано инструментальное устройство 8, которое закреплено на инструментальной машине (не изображена) посредством винтового устройства (крепежный винт 9d, подкладная шайба 9e, гаечная часть 9f). Инструментальное устройство 8 имеет рабочую область 8j для воздействия на заготовку или систему заготовок. От области 8f приводной поверхности инструмента приводные силы посредством соединительной области 8k инструмента передаются на эту рабочую область 8j. При этом инструментальное устройство 8 посредством крепежного винта 9d, который оказывает свое силовое воздействие на инструментальное устройство 8 посредством подкладной шайбы 9e, удерживается на инструментальной машине. Передача приводных сил от инструментальной машины на инструментальное устройство 8 достигается по существу за счет взаимного сцепления с геометрическим замыканием области 9 передачи вращающего момента и области 8f приводной поверхности инструмента. При этом инструментальное устройство 8 удерживается на инструментальной машине так, что ось 8b вращения инструмента и выходная ось 2 по существу совпадают. Инструментальное устройство 8 приводится во вращательно-осциллирующее движение вокруг выходной оси 2.
На фиг.14 показано инструментальное устройство 8, которое закреплено на инструментальной машине (не изображена) посредством другого винтового устройства (стяжное болтовое устройство 9g, подкладная шайба 9e, гаечная часть 9f). Инструментальное устройство 8 имеет рабочую область 8j для воздействия на заготовку или систему заготовок. От области 8f приводной поверхности инструмента приводные силы посредством соединительной области 8k инструмента передаются на эту рабочую область 8j. При этом инструментальное устройство 8 посредством гаечной части 9f и стяжного болтового устройства 9g, которые посредством подкладной шайбы 9e оказывают свое силовое воздействие на инструментальное устройство 8, удерживается на инструментальной машине. Передача приводных сил от инструментальной машины на инструментальное устройство 8 достигается по существу за счет взаимного сцепления с геометрическим замыканием области 9 передачи вращающего момента и области 8f приводной поверхности инструмента. При этом инструментальное устройство 8 удерживается на инструментальной машине так, что ось 8b вращения инструмента и выходная ось 2 по существу совпадают. Инструментальное устройство 8 приводится во вращательно-осциллирующее движение вокруг выходной оси 2.
На фиг.15 показана система инструментальной машины, имеющая инструментальное устройство 8, которое посажено в инструментальной машине 22. Инструментальное устройство 8 имеет присоединительную область 8a инструмента, этой областью оно соединяется с инструментальной машиной 22. Инструментальная машина 22 имеет выходной шпиндель 22a, он направляет приводные силы на инструментальное устройство 8, в частности его присоединительную область 8a инструмента. Выходной шпиндель 22a движется вокруг выходной оси 2, в частности совершая вращательно-осциллирующее движение, при этом также инструментальное устройство 8 приводится в такое же движение. Инструментальное устройство 8 имеет рабочую область 8j, которая предназначена для того, чтобы воздействовать на заготовку или систему заготовок (не изображено). Приводные силы инструментальной машины 22 посредством соединительной области 8k инструмента передаются от присоединительной области 8a инструмента на рабочую область 8j. Инструментальная машина 22 имеет манипуляционный рычаг 22b, который предназначен для того, чтобы обеспечивать возможность замены инструментального устройства 8.
На фиг.16 и фиг.17 показана область 9 передачи вращающего момента инструментальной машины на различных видах. На фиг.16 показан вид снизу, а на фиг.17 показано изображение сечения вида сбоку области 9 передачи вращающего момента. При этом под видом снизу следует понимать, что на область 9 передачи вращающего момента смотрят из того направления, из которого инструментальное устройство может вставляться в инструментальную машину. Изображенная область 9 передачи вращающего момента инструментальной машины на фиг.16 и 17 изображена в виде звездообразного многоугольника, имеющего закругленные углы, при этом изложенные ниже взаимосвязи по меньшей мере по смыслу могут также переноситься на другие формы такой области 9 передачи вращающего момента.
На виде снизу, фиг.16, видны закругленные углы (переходные области 9h) многоугольника. При этом так называемая сторона многоугольника образуется двумя областями 9a выходных поверхностей и одной переходной областью 9h. При этом такая переходная область 9h предпочтительно должна пониматься как закругление, имеющее изменяющийся или постоянный радиус. Также предпочтительно такая переходная область 9h присоединяется по касательной к одной или двум областям 9a выходных поверхностей. Также предпочтительно изменяющийся или постоянный радиус такой переходной области 9h выбран из диапазона от 0,25 мм до 10 мм, предпочтительнее от 1 до 5 и особенно предпочтительно от 2,5 мм до 4 мм. Отдельные стороны многоугольника смещены каждая друг относительно друга на равноотстоящий угол k12. Предпочтительно этот, предпочтительно равноотстоящий угол k12 получается из зависимости: полная окружность/(количество сторон)=k12; в настоящем случае 360°/12=30°. Предпочтительно благодаря равноотстоящему углу k12 обеспечена возможность посадки инструментального устройства (не изображено) в различных положениях поворота в этой области 9 передачи вращающего момента и вместе с тем инструментальной машины. В настоящем случае инструментальное устройство может смещаться относительно области 9 передачи вращающего момента дискретными шагами в 30°.
Область 9 передачи вращающего момента имеет участок 9i верхней поверхности инструментальной машины, в этом участке 9i верхней поверхности инструментальной машины расположена предпочтительно круглая выемка, имеющая диаметр k10. Эта выемка, имеющая диаметр k10, предназначена для посадки соединительного устройства (не изображено) или, соответственно, взаимодействия с ним. Посредством соединительного устройства инструментальное устройство (не изображено) может удерживаться на инструментальной машине. Также предпочтительно для этой выемки возможны и формы, отличающиеся от круглой формы. Предпочтительно эта выемка выполнена в виде некой выемки со сквозным или глухим отверстием, имеющей или не имеющей резьбовую область или, соответственно, в виде проходной выемки для удерживающего устройства (не изображено).
Диаметры k2 и k3 описывают внутренний диаметр области передачи вращающего момента. В одном из предпочтительных вариантов осуществления внутренний диаметр k2 предпочтительно выбран из диапазона от 30 мм до 36 мм, предпочтительнее от 32 мм до 34 мм, особенно предпочтительно внутренний диаметр k2 по существу равен 33,35 мм (+/-0,1 мм).
В одном из предпочтительных вариантов осуществления внутренний диаметр k3 предпочтительно выбран из диапазона от 22 мм до 27 мм, предпочтительнее от 24 мм до 26 мм, особенно предпочтительно внутренний диаметр k3 по существу равен 25 мм (+/-0,1 мм).
Расстояние k1 задает расстояние между двумя областями 9a выходных поверхностей, которые на этом виде расположены параллельно друг напротив друга (при пространственном рассмотрении эти области 9a выходных поверхностей также наклонены друг относительно друга). При сравнении с головкой винта (например, внутренним шестигранником) расстояние k1 соответствует размеру ключа.
В одном из предпочтительных вариантов осуществления этот размер k1 ключа выбран предпочтительно из диапазона от 26 мм до 30 мм, предпочтительнее из диапазона от 27 мм до 29 мм, особенно предпочтительно размер ключа по существу равен 28,4 мм (+/-0,1 мм).
Диаметр 25 указывает базовый диаметр для области 9 передачи вращающего момента инструментальной машины. В одном из предпочтительных вариантов осуществления базовый диаметр 25 предпочтительно выбран из диапазона от 31 мм до 33 мм, предпочтительнее из диапазона от 31,5 мм до 32,5 мм и особенно предпочтительно базовый диаметр 25 по существу равен 32 мм (+/-0,1 мм). При этом базовый диаметр 25 должен также предпочтительно толковаться, как номинальный размер области 9 передачи вращающего момента, и задан в направлении выходной оси на определенной высоте.
На изображении сечения, фиг.17, особенно хорошо видна поверхность поперечного сечения области 9 передачи вращающего момента. При этом область 9 передачи вращающего момента выполнена по существу в виде выемки с глухим отверстием. Причем эта выемка сужается в направлении выходной оси 2 вверх и имеет по существу форму усеченного конуса. Поверхность поперечного сечения этого усеченного конуса имеет предпочтительно изображенную на фиг.16 форму многоугольника, имеющего закругленные углы, причем эта поверхность поперечного сечения расположена ортогонально выходной оси 2.
Оказалось, что, в частности, долгие сроки службы для этой области 9 передачи вращающего момента, а также для посаженного в нее инструментального устройства 1 достижимы, когда определенные переходы, в частности к областям 9a выходных поверхностей или между ними, закруглены. При этом под таким закруглением следует понимать, что переход к этим областям выходных поверхностей имеет постоянный или изменяющийся радиус.
Также предпочтительно постоянный или изменяющийся радиус такой области, как и переходной области 9h, выбран из диапазона от 0,25 мм до 10 мм, предпочтительнее от 1 мм до 5 мм и особенно предпочтительно от 2,5 мм до 4 мм.
Области 9a выходных поверхностей на изображении фиг.17 наклонены на угол k13 относительно воображаемой вертикали (параллельно выходной оси 2). В одном из предпочтительных вариантов осуществления этот угол выбран из диапазона от 10° до 30°, предпочтительно из диапазона от 17,5° до 22,5°, и особенно предпочтительно угол k13 равен по существу 20° (+/-0,5°).
Диаметр k2 характеризует предпочтительно ту область области 9 передачи вращающего момента, от которой области 9a выходных поверхностей (снизу в направлении выходной оси 2) проходят по существу прямолинейно. После этого прямолинейного прохождения области 9a выходных поверхностей переходят предпочтительно в радиус k9 и после этого в участок 9i верхней поверхности инструментальной машины.
В одном из предпочтительных вариантов осуществления области 9 выходных поверхностей на некоторой высоте (направление, параллельное выходной оси 2) по меньшей мере для размера k14 проходят по существу прямолинейно, при этом под «прямолинейным» в смысле изобретения следует понимать, что они не имеют существенной кривизны, предпочтительно в ненагруженном состоянии, также предпочтительно в нагруженном состоянии. Предпочтительно размер k14 выбран из диапазона от 1,5 мм до 10 мм, предпочтительнее из диапазона от 2 мм до 6 мм, особенно предпочтительно размер k14 по существу равен 4 мм (+/-0,5 мм). Предпочтительно под размером k14 следует понимать кратчайшее прямолинейное прохождение одной из областей 2 выходных поверхностей.
В одном из предпочтительных вариантов осуществления область 9 передачи вращающего момента имеет глубину k11, также предпочтительно глубина k11 выбрана из диапазона от 3,4 мм до 10 мм, предпочтительнее из диапазона от 4,5 мм до 8 мм и особенно предпочтительно глубина k11 по существу равна 6,5 мм (+/-1мм).
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Устройство для посадки инструмента ручной инструментальной машины
2 Выходная ось
3 Зажимное устройство
3a Зажимная сила
4 Удерживающее устройство
4a Первое крюковое устройство
4b Второе крюковое устройство
4c Удерживающая поверхность
4d Точка вращения крючка
4g Ограничительная поверхность крюкового устройства
4h Удерживающее силовое воздействие
5e Направляющая выемка
6 Подвижный элемент
8 Инструментальное устройство
8a Присоединительная область инструмента
8b Ось вращения инструмента
8c Первая ортогональная плоскость
8d Вторая ортогональная плоскость
8e Кодирующее устройство инструмента
8f Область приводной поверхности инструмента
8g Осевая протяженность области приводной поверхности инструмента
8h Точка поверхности инструмента
8i Боковая стенка инструмента
8j Рабочая область
8k Соединительная область инструмента
9 Область передачи вращающего момента
9a Область выходной поверхности
9b Точка поверхности
9c Соединительная область
9d Крепежный винт
9e Подкладная шайба
9f Гаечная часть
9g Стяжное болтовое устройство
9h Переходная область (расположенная между областями выходных поверхностей)
9i Участок верхней поверхности инструментальной машины
13 Верхняя ограничительная плоскость
14 Нижняя ограничительная плоскость
15 Осевая плоскость
16 Радиальная плоскость
17 Касательная плоскость
18 Нормаль к поверхности области выходной поверхности
19 Кодирующее устройство
19a Возвышенное кодирующее устройство
19b Кодирующее устройство, имеющее выемку
20a Точечная область соприкосновения
20b Линейная область соприкосновения
20c Поверхностная область соприкосновения
21 Линия соприкосновения между областью приводной поверхности инструмента и областью выходной поверхности
22 Инструментальная машина
22a Выходной шпиндель
22b Манипуляционный рычаг
25 Базовый диаметр области передачи вращающего момента
α Первый угол
β Второй угол
r1 Первое расстояние от боковой стенки инструмента до оси вращения инструмента
r2 Второе расстояние от боковой стенки инструмента до оси вращения инструмента
RI Первый радиус кривизны области выходной поверхности
RIa Изменяющийся радиус кривизны области выходной поверхности
RII Второй радиус кривизны области выходной поверхности
a Прямо проходящая линия координатной сетки области выходной поверхности
bI Первая искривленная линия координатной сетки области выходной поверхности
bII Вторая искривленная линия координатной сетки области выходной поверхности
bIa Третья, имеющая изменяющуюся кривизну, линия координатной сетки области выходной поверхности
k1 Размер ключа, расстояние между параллельными областями выходных поверхностей
k2 Первый внутренний диаметр
k3 Второй внутренний диаметр
k10 Диаметр выемки в участке верхней поверхности инструментальной машины
k11 Глубина области передачи вращающего момента
k12 Угол многоугольника
k13 Угол между областью выходной поверхности и параллелью к выходной оси
k14 Прямолинейное прохождение области выходной поверхности
Реферат
Изобретение относится к инструментальной машине. Машина содержит устройство для посадки инструмента, предназначенное для удерживания инструментального устройства на инструментальной машине. Устройство для посадки инструмента имеет область передачи вращающего момента и удерживающее устройство. Область передачи вращающего момента для передачи приводной силы на инструментальное устройство имеет две расположенные на расстоянии от упомянутой выходной оси области выходных поверхностей, имеющие каждая множество точек поверхности. Касательные плоскости в этих точках поверхности наклонены относительно осевой плоскости, которая включает в себя эту выходную ось. Касательные плоскости наклонены относительно радиальной плоскости, которая распространяется перпендикулярно выходной оси. Нормаль к одной из этих касательных плоскостей ориентирована в радиальном направлении к выходной оси. Область передачи вращающего момента имеет боковую стенку и в ней образована полая коническая выемка, которая имеет поперечное сечение с изменяющимся расстоянием от боковой стенки до выходной оси в плоскости, ортогональной этой выходной оси. В результате выходной вращающий момент надежно передается через устройство для посадки инструмента. 5 н. и 18 з.п. ф-лы, 17 ил.
Формула
Документы, цитированные в отчёте о поиске
Шлифовальная насадка и держатель
Комментарии