Система и способ для управления рулением и торможением - RU2692415C1
Код документа: RU2692415C1
Чертежи


Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к системам и способам для управления рулением и торможением.
Уровень техники
[0001] Сообщество автомобильных инженеров (SAE) определило множество уровней автономной эксплуатации транспортного средства. На уровнях 0-2 водитель-человек наблюдает или управляет большинством задач вождения, зачастую без помощи от транспортного средства. Например, на уровне 0 ("без автоматизации"), водитель-человек отвечает за все операции транспортного средства. На уровне 1 ("помощь водителю"), транспортное средство иногда помогает в рулении, ускорении или торможении, но водитель все еще отвечает за подавляющее большинство управления транспортным средством. На уровне 2 ("частичная автоматизация") транспортное средство может управлять рулением, ускорением и торможением в некоторых обстоятельствах без взаимодействия с человеком. На уровнях 3-5 транспортное средство принимает на себя большую часть связанных с вождением задач. На уровне 3 ("традиционная автоматизация") транспортное средство может выполнять руление, ускорение и торможение в некоторых обстоятельствах, а также наблюдение за окружением для вождения. Уровень 3, однако, требует от водителя вмешиваться время от времени. На уровне 4 ("высокая автоматизация"), транспортное средство может выполнять те же задачи, что и на уровне 3, но не полагаясь на вмешательство водителя в некоторых режимах вождения. На уровне 5 ("полная автоматизация"), транспортное средство может выполнять почти все задачи без какого-либо вмешательства водителя.
[0002] Электронная система управления устойчивостью транспортного средства в транспортном средстве предназначается, чтобы уменьшать потерю силы сцепления ходовыми колесами транспортного средства. Контроллер, отвечающий за электронное управление устойчивостью транспортного средства, принимает угол поворота управляемых колес, поперечное ускорение, поворот вокруг вертикальной оси транспортного средства и скорости каждого ходового колеса. Контроллер определяет и сравнивает намеченное направление транспортного средства и фактическое направление. Если намеченное и фактическое направление являются различными, транспортное средство переходит в скольжение. Контроллер тогда приводит в действие тормоза на отдельных ходовых колесах, чтобы противодействовать заносу, например, на внешнем переднем колесе, чтобы противодействовать избыточной поворачиваемости, или на внутреннем заднем колесе, чтобы противодействовать недостаточной поворачиваемости.
Сущность изобретения
В одном варианте осуществления охарактеризована система, содержащая компьютер, запрограммированный с возможностью: выдавать команду на прикладывание момента или вплоть до предварительно определенного значения момента руления, или вплоть до предварительно определенного значения чистого асимметричного тормозного усилия, при этом каждое предварительно определенное значение выбирается, чтобы добиваться предварительно определенного крутящего момента вокруг вертикальной оси транспортного средства на транспортном средстве, который, по большей части, является наименьшим из первого максимального крутящего момента вокруг вертикальной оси, получающегося в результате приведения в действие рулевой системы, и второго максимального крутящего момента вокруг вертикальной оси, получающегося в результате приведения в действие тормозной системы.
В дополнительном варианте осуществления рулевая система включает в себя рулевой актуатор с электроусилителем.
В дополнительном варианте осуществления тормозная система включает в себя два тормоза, соединенных с соответствующими колесами на противоположных сторонах транспортного средства.
В дополнительном варианте осуществления компьютер программируется, чтобы выдавать команду тормозной системе прикладывать чистое асимметричное тормозное усилие посредством каждого тормоза, прикладывающего тормозное усилие, отличное от другого тормоза.
В дополнительном варианте осуществления компьютер программируется, чтобы выдавать команду тормозной системе прикладывать чистое асимметричное тормозное усилие в ответ на отказ рулевой системы.
В дополнительном варианте осуществления компьютер программируется, чтобы выдавать команду тормозной системе прикладывать тормозное усилие к транспортному средству в ответ на отказ рулевой системы.
В дополнительном варианте осуществления компьютер является модулем рулевого управления с усилителем.
В дополнительном варианте осуществления система дополнительно содержит рулевую систему.
В дополнительном варианте осуществления система дополнительно содержит тормозную систему.
В еще одном варианте осуществления охарактеризован способ, содержащий этапы, на которых: выдают команду на прикладывание момента или вплоть до предварительно определенного значения момента руления, или вплоть до предварительно определенного значения чистого асимметричного тормозного усилия, при этом каждое предварительно определенное значение выбирается, чтобы добиваться предварительно определенного крутящего момента вокруг вертикальной оси транспортного средства на транспортном средстве, который по большей части является наименьшим из первого максимального крутящего момента вокруг вертикальной оси, получающегося в результате приведения в действие рулевой системы, и второго максимального крутящего момента вокруг вертикальной оси, получающегося в результате приведения в действие тормозной системы.
В дополнительном варианте осуществления рулевая система включает в себя рулевой актуатор с электроусилителем.
В дополнительном варианте осуществления тормозная система включает в себя два тормоза, соединенных с соответствующими колесами на противоположных сторонах транспортного средства.
В дополнительном варианте осуществления выдают команду тормозной системе прикладывать чистое асимметричное тормозное усилие посредством каждого тормоза, прикладывающего различное тормозное усилие.
В дополнительном варианте осуществления выдают команду тормозной системе прикладывать чистое асимметричное тормозное усилие в ответ на отказ рулевой системы.
В дополнительном варианте осуществления выдают команду тормозной системе прикладывать тормозное усилие к транспортному средству в ответ на отказ рулевой системы.
Краткое описание чертежей
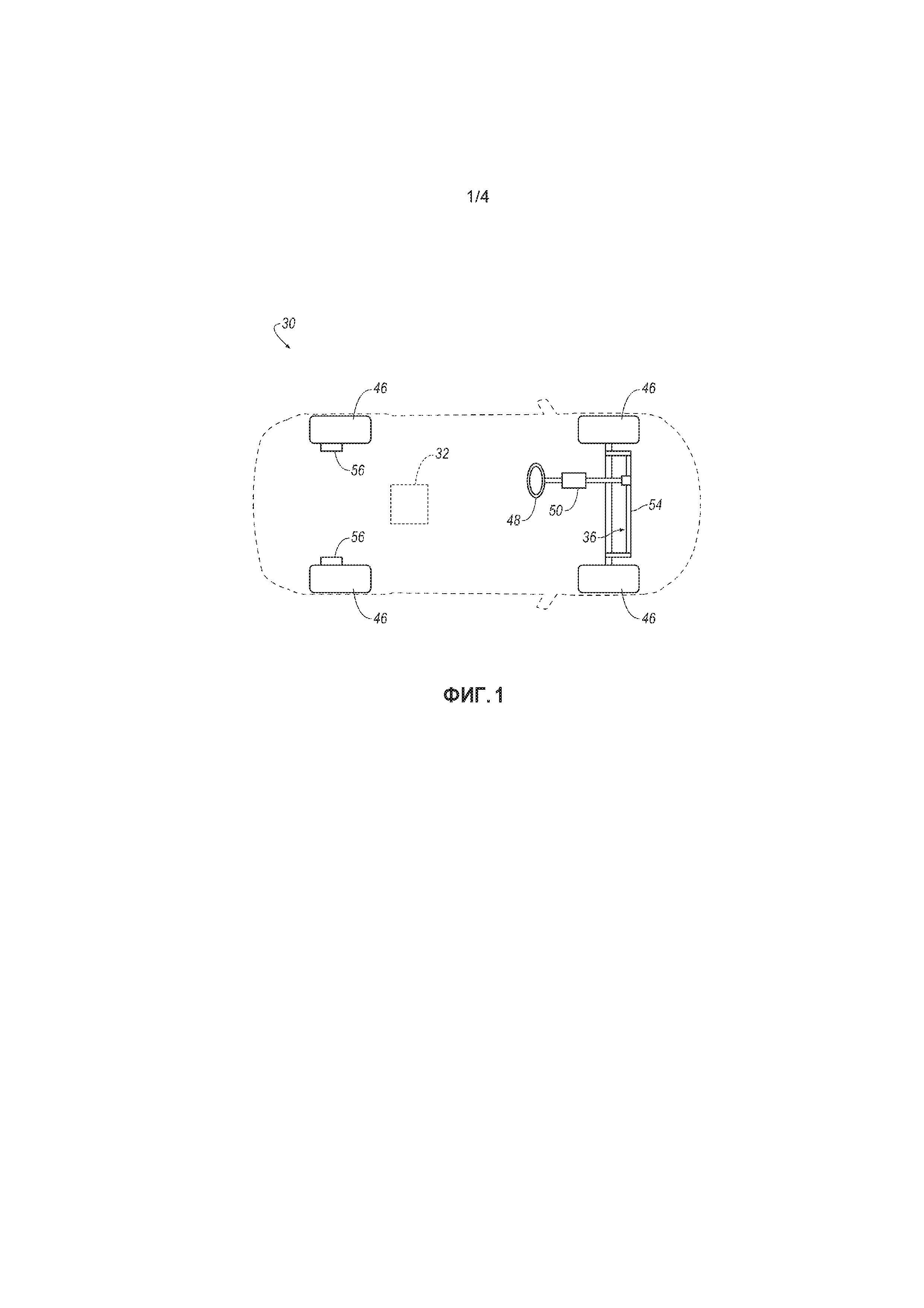
[0003] Фиг. 1 - это блок-схема примерного транспортного средства.
[0004] Фиг. 2 - это блок-схема системы управления транспортного средства на фиг. 1.
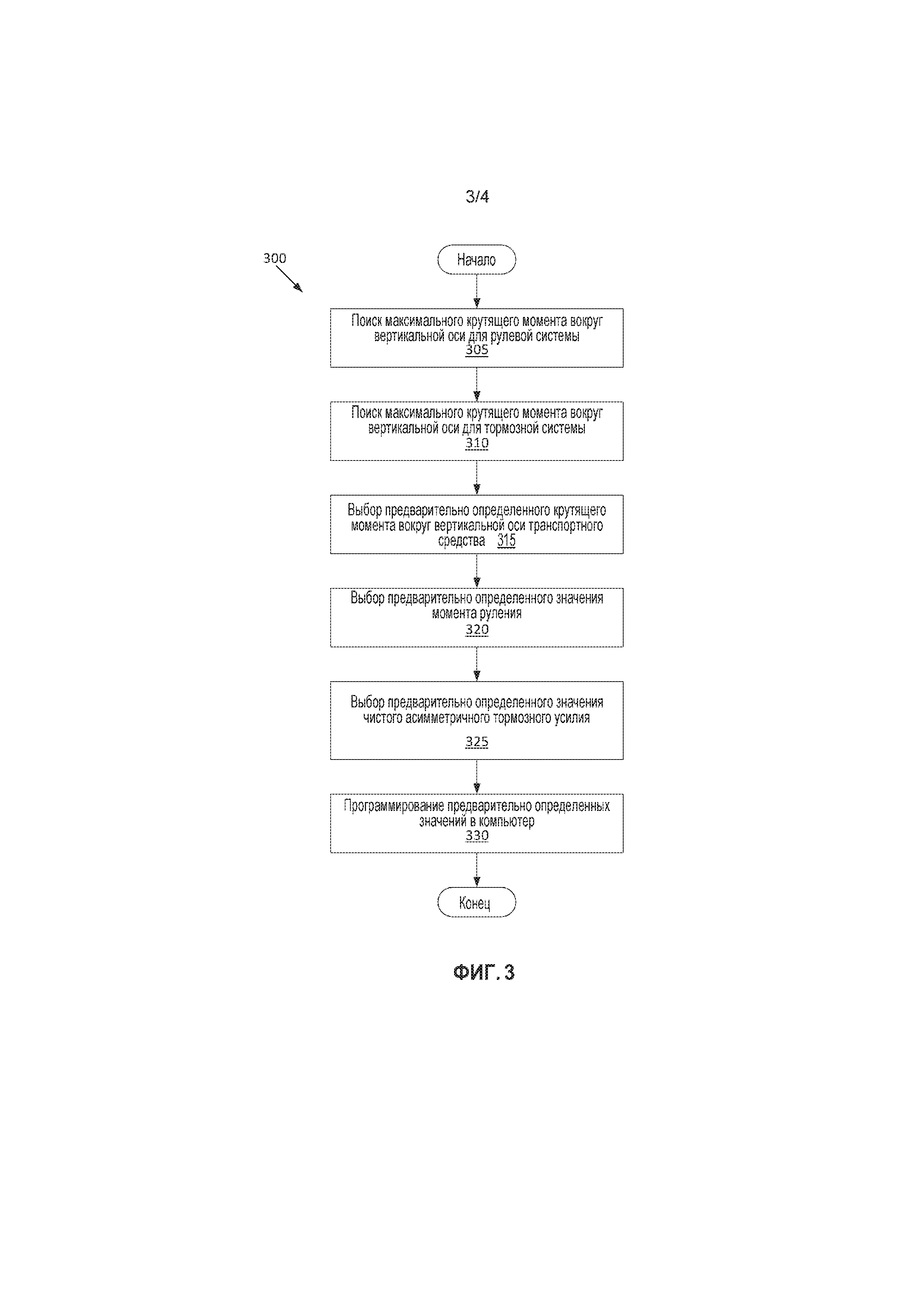
[0005] Фиг. 3 - это блок-схема последовательности операций процесса для примерного процесса выбора значений, предварительно запрограммированных в компьютер транспортного средства на фиг. 1.
[0006] Фиг. 4 - это блок-схема последовательности операций процесса для примерного процесса управления движением транспортного средства на фиг. 1.
Подробное описание изобретения
[0007] Фиг. 1 показывает примерное транспортное средство 30, включающее в себя систему 32 управления, которая, в свою очередь, включает в себя компьютер 34. Компьютер 34 программируется, чтобы выдавать команду на прикладывание крутящего момента вплоть до предварительно определенного значения момента руления и до предварительно определенного значения чистого асимметричного тормозного усилия. Каждое предварительно определенное усилие выбирается, чтобы добиваться предварительно определенного крутящего момента вокруг вертикальной оси транспортного средства, который, по большей части, является меньшим из первого максимального крутящего момента вокруг вертикальной оси, получающегося в результате приведения в действие рулевой системы 36, и второго максимального крутящего момента вокруг вертикальной оси, получающегося в результате приведения в действие тормозной системы 38. (Прилагательные "первый" и "второй" используются повсюду в этом документе в качестве идентификаторов и не предназначены, чтобы означать важность или порядок).
[0008] Рулевая система 36 может включать в себя рулевой актуатор 50, который является рулевым актуатором с электроусилителем.
[0009] Тормозная система 38 может включать в себя два тормоза 56, соединенных с соответствующими колесами 46 на противоположных сторонах транспортного средства 30. Дополнительно, компьютер 34 может быть запрограммирован, чтобы выдавать команду тормозной системе 38 прикладывать чистое асимметричное тормозное усилие посредством каждого тормоза 56, прикладывающего тормозное усилие, отличное от другого тормоза 56.
[0010] Компьютер 34 может быть дополнительно запрограммирован выдавать команду тормозной системе 38 прикладывать чистое асимметричное тормозное усилие в ответ на отказ рулевой системы 36. Дополнительно, компьютер 34 может быть запрограммирован, чтобы выдавать команду тормозной системе 38 прикладывать тормозное усилие к транспортному средству 30 в ответ на отказ рулевой системы 36. Дополнительно или альтернативно, компьютер 34 может быть запрограммирован предоставлять предупреждение пассажиру в ответ на отказ рулевой системы 36.
[0011] Компьютер 36 может быть модулем рулевого управления с усилителем.
[0012] Система 32 управления может включать в себя рулевую систему 36. Дополнительно, система 32 управления может включать в себя тормозную систему 38.
[0013] Способ включает в себя выдачу команды на прикладывание момента вплоть до предварительно определенного значения момента руления и до предварительно определенного значения чистого асимметричного тормозного усилия, при этом каждое предварительно определенное значение выбирается, чтобы добиваться предварительно определенного момента поворота вокруг вертикальной оси транспортного средства на транспортном средстве 30, который, по большей части, является меньшим из первого максимального крутящего момента вокруг вертикальной оси, получающегося в результате приведения в действие рулевой системы 36, и второго максимального крутящего момента вокруг вертикальной оси, получающегося в результате приведения в действие тормозной системы 38.
[0014] Рулевая система 36 может включать в себя рулевой актуатор 50, который является рулевым актуатором с электроусилителем.
[0015] Тормозная система 38 может включать в себя два тормоза 56, соединенных с соответствующими колесами 46 на противоположных сторонах транспортного средства 30. Дополнительно, способ может включать в себя выдачу команды тормозной системе 38 прикладывать чистое асимметричное тормозное усилие посредством каждого тормоза 56, прикладывающего различное тормозное усилие.
[0016] Способ может включать в себя выдачу команды тормозной системе 38 прикладывать чистое асимметричное тормозное усилие в ответ на отказ рулевой системы 36. Дополнительно, способ может включать в себя выдачу команды тормозной системе 38 прикладывать тормозное усилие к транспортному средству 30 в ответ на отказ рулевой системы 36. Альтернативно или дополнительно, способ может включать в себя предоставление предупреждения пассажиру в ответ на отказ рулевой системы 36.
[0017] Система 32 управления предоставляет возможность одной из рулевой системы 36 и тормозной системы 38 брать на себя управление другой из рулевой системы 36 и тормозной системы 38, если другая отказывает, в то время как транспортное средство 30 выполняет поворот. Та из рулевой системы 36 и тормозной системы 38, которая остается работоспособной, тогда приспособлена прикладывать достаточный крутящий момент вокруг вертикальной оси к транспортному средству 30, чтобы продолжать поворот. Транспортное средство 30, следовательно, менее вероятно должно ударять объект, такой как другое транспортное средство или дорожный барьер, и какие-либо пассажиры транспортного средства 30 менее вероятно должны получать повреждения.
[0018] Транспортное средство 30 может работать на одном или более уровнях автономной эксплуатации транспортного средства. В целях этого описания автономный режим определяется как режим, в котором каждое из тяги (например, через силовую цепь, включающую в себя электромотор и/или двигатель внутреннего сгорания), торможения и руления транспортного средства 30 управляется посредством компьютера 34; в полуавтономном режиме компьютер 34 управляет одним или двумя из тяги, торможения и руления транспортного средства 30. Таким образом, в одном примере, неавтономные режимы работы могут ссылаться на уровни 0-1 SAE, частично автономные или полуавтономные режимы работы могут ссылаться на уровни 2-3 SAE, а полностью автономные режимы работы могут ссылаться на уровни 4-5 SAE.
[0019] Со ссылкой на фиг. 2, система 32 управления включает в себя компьютер 34. Компьютер 34 включен в транспортное средство 30 для выполнения различных операций, включающих в себя те, которые описаны в данном документе. Компьютер 34 является вычислительным устройством, которое, как правило, включает в себя процессор и память, память включает в себя одну или более форм компьютерно-читаемых носителей и хранит инструкции, исполняемые процессором для выполнения различных операций, включающих в себя те, которые описаны в данном документе. Память компьютера 34 дополнительно, как правило, хранит отдаленные данные, принимаемые через различные механизмы связи; например, компьютер 34, как правило, конфигурируется для связи по сети связи в транспортном средстве 30. Компьютер 34 может также иметь соединение с бортовым диагностическим разъемом (OBD-II). Хотя один компьютер 34 показан на фиг. 2 для простоты иллюстрации, должно быть понятно, что компьютер 34 может включать в себя, и различные операции, описанные в данном документе, могут выполняться посредством одного или более вычислительных устройств. Компьютер 34 может быть модулем управления, например, модулем рулевого управления с усилителем или может включать в себя модуль управления среди других вычислительных устройств.
[0020] Система 32 управления может передавать сигналы через сеть связи, которая может быть шиной локальной сети контроллеров (CAN), Ethernet, локальной соединительной сетью (LIN), Bluetooth, и/или посредством любой другой проводной или беспроводной сети связи. Компьютер 34 может быть на связи с системой 40 тяги, рулевой системой 36, тормозной системой 38, датчиками 42 и/или пользовательским интерфейсом 44, среди других компонентов.
[0021] С продолжающейся ссылкой на фиг. 2, система 40 движения транспортного средства 30 генерирует энергию и преобразует энергию в движение транспортного средства 30. Система 40 тяги может быть известной подсистемой тяги транспортного средства, например, традиционной силовой цепью, включающей себя двигатель внутреннего сгорания, соединенный с трансмиссией, которая передает вращательное движение ходовым колесам 46; электрической силовой цепью, включающей в себя аккумуляторы, электромотор и трансмиссию, которая передает вращательное движение ходовым колесам 46; гибридной силовой цепью, включающей в себя элементы традиционной силовой цепи и электрической силовой цепи; или любым другим типом системы тяги. Система 40 тяги находится на связи с и принимает входной сигнал от компьютера 34 и от водителя-человека. Водитель-человек может управлять системой 40 тяги, например, через педаль акселератора и/или рычаг переключения передач (не показан).
[0022] Со ссылкой на фиг. 1 и 2, рулевая система 36 является типично известной подсистемой рулевого управления транспортного средства и управляет поворотом ходовых колес 46. Рулевая система 36 находится на связи с и принимает входной сигнал от рулевого колеса 48 и компьютера 34. Рулевая система 36 может быть системой реечной передачи с рулевым управлением с электроусилителем через рулевой актуатор 50, системой "руления-по-проводам", обе из которых известны в области техники, или любой другой подходящей системой. Рулевая система 36 может включать в себя рулевое колесо 48, прикрепленное к рулевой колонке 52, соединенной с рулевой рейкой 54.
[0023] Со ссылкой на фиг. 1, рулевая рейка 54 соединяется с возможностью поворота с ходовыми колесами 46, например, в шарнирном четырехзвеннике. Прямолинейное перемещение рулевой рейки 54 приводит в результате к повороту ходовых колес 46. Рулевая колонка 52 может быть соединена с рулевой рейкой 54 через реечную передачу, т.е., через зацепление шестерен между ведущей шестерней и шестерней зубчатой рейки (не показана).
[0024] Рулевая колонка 52 преобразует вращение рулевого колеса 48 в перемещение рулевой рейки 54. Рулевая колонка 52 может быть, например, валом, соединяющим рулевое колесо 48 с рулевой рейкой 54. Рулевая колонка 52 может размещать датчик крутящего момента и муфту (не показана).
[0025] Рулевое колесо 48 предоставляет возможность водителю рулить транспортным средством 30, передавая вращение рулевого колеса 48 в перемещение рулевой рейки 54. Рулевое колесо 48 может быть, например, жестким кольцом, неподвижно прикрепленным к рулевой колонке 52, такой, которая известна.
[0026] С продолжающейся ссылкой на фиг. 1, рулевой актуатор 50 соединяется с рулевой системой 36, например, рулевой колонкой 52, с тем, чтобы вызывать поворот ходовых колес 46. Например, рулевой актуатор 50 может быть электромотором, соединенным с возможностью вращения с рулевой колонкой 52, т.е., соединенным так, чтобы иметь возможность прикладывать момент руления к рулевой колонке 52. Рулевой актуатор 50 может быть на связи с компьютером 34.
[0027] Рулевой актуатор 50 может предоставлять усилитель для рулевой системы 36. Другими словами, рулевой актуатор 50 может предоставлять крутящий момент в направлении, в котором рулевое колесо 48 поворачивается водителем-человеком, предоставляя возможность водителю поворачивать рулевое колесо 48 с меньшим усилием. Рулевой актуатор 50 может быть рулевым актуатором с электроусилителем.
[0028] Со ссылкой на фиг. 1 и 2, тормозная система 38 является типично известной тормозной подсистемой транспортного средства и препятствует движению транспортного средства 30, чтобы, тем самым, замедлять и/или останавливать транспортное средство 30. Тормозная система 38 включает в себя тормоза 56, соединенные с ходовыми колесами 46. Тормоза 56 могут быть фрикционными тормозами, такими как дисковые тормоза, барабанные тормоза, ленточные тормоза и т.д.; рекуперативными тормозами; любым другим подходящим типом тормозов; или сочетанием. Тормоза 56 могут быть соединены, например, с соответствующими ходовыми колесами 46 на противоположных сторонах транспортного средства 30. Тормозная система 38 находится на связи с и принимает входной сигнал от компьютера 34 и от водителя-человека. Водитель-человек может управлять торможением, например, посредством педали тормоза (не показана).
[0029] Со ссылкой на фиг. 2, транспортное средство 30 может включать в себя датчики 42. Датчики 42 могут обнаруживать внутренние состояния транспортного средства 30, например, скорость колеса, ориентацию колеса и переменные параметры двигателя и трансмиссии. Датчики 42 могут обнаруживать позицию или ориентацию транспортного средства 30, например, датчики системы глобального позиционирования (GPS); акселерометры, такие как пьезоэлектрические или микроэлектромеханические системы (MEMS); гироскопы, такие как скоростные, лазерные или волоконно-оптические гироскопы; инерциальные измерительные блоки (IMU); и магнетометры. Датчики 42 могут обнаруживать параметры внешнего окружения, например, радиолокационные датчики, сканирующие лазерные дальномеры, устройства лазерной системы обнаружения и измерения дальности (ЛИДАР), и датчики обработки изображений, такие как камеры. Датчики 42 могут включать в себя устройства связи, например, устройства связи между транспортным средством и инфраструктурой (V2I) или между транспортными средствами (V2V).
[0030] Пользовательский интерфейс 44 представляет информацию и принимает информацию от пассажира транспортного средства 30. Пользовательский интерфейс 44 может быть расположен, например, на приборной панели в пассажирском салоне (не показан) транспортного средства 30 или повсюду, где может быть легко увиден пассажиром. Пользовательский интерфейс 44 может включать в себя круговые шкалы, цифровые индикаторы, экраны, динамики и т.д. для вывода, т.е., предоставления информации пассажиру, например, человеко-машинный интерфейс (HMI), включающий в себя элементы, такие, которые известны. Пользовательский интерфейс 44 может включать в себя кнопки, вращаемые кнопки, кнопочные панели, сенсорные экраны, микрофоны и т.д. для приема входных данных, т.е., информации, инструкции и т.д., от пассажира.
[0031] Фиг. 3 - это блок-схема последовательности операций процесса, иллюстрирующая примерный процесс 300 для выбора предварительно определенного значения момента руления и предварительно определенного значения чистого асимметричного тормозного усилия. Процесс 300 может выполняться в ходе разработки транспортного средства 30.
[0032] Процесс 300 начинается на этапе 305. На этапе 305 сначала определяется максимальный крутящий момент вокруг вертикальной оси, получающийся в результате приведения в действие рулевой системы 36. Крутящий момент вокруг вертикальной оси является крутящим моментом, имеющим тенденцию вызывать поворот транспортного средства 30 вокруг оси, которая является вертикальной относительно транспортного средства 30, другими словами, крутящим моментом, имеющим тенденцию изменять направление транспортного средства 30. Первый максимальный крутящий момент вокруг вертикальной оси является физическим ограничением рулевой системы 36, в частности, наибольшим крутящим моментом вокруг вертикальной оси, который может быть создан на транспортном средстве 30 исключительно от приведения в действие рулевой системы 36. Первый максимальный крутящий момент вокруг вертикальной оси может быть определен посредством уравнений динамических характеристик транспортного средства 30, посредством моделирований транспортного средства 30, посредством экспериментов над транспортным средством 30 или посредством комбинирования уравнений, моделирований и экспериментов.
[0033] Далее, на этапе 310, определяется второй максимальный крутящий момент вокруг вертикальной оси, получающийся в результате приведения в действие тормозной системы 38. Второй максимальный крутящий момент вокруг вертикальной оси является физическим ограничением тормозной системы 38, в частности, наибольшим крутящим моментом вокруг вертикальной оси, который может быть создан на транспортном средстве 30 исключительно от приведения в действие тормозной системы 38. Тормозная система 38 может создавать крутящий момент вокруг вертикальной оси на транспортном средстве 30 посредством приведения в действие тормозов 56 асимметричным образом, т.е., приведения в действие каждого тормоза 56 с отличным тормозным усилием от другого тормоза 56, создавая усилия на транспортном средстве 30 от тормозной системы асимметричными. Чистое асимметричное тормозное усилие, следовательно, определяется как разница в суммарном тормозном усилии на конце плеча момента вправо от центра тяжести транспортного средства 30 и суммарного тормозного усилия на конце плеча момента влево от центра тяжести транспортного средства 30 и может быть измерено в единицах силы, например, Ньютонах. Второй максимальный крутящий момент вокруг вертикальной оси может быть определен посредством уравнений динамических характеристик транспортного средства 30, посредством моделирований транспортного средства 30, посредством экспериментов над транспортным средством 30 или посредством комбинирования уравнений, моделирований и экспериментов.
[0034] Далее, на этапе 315, предварительно определенный крутящий момент вокруг вертикальной оси транспортного средства выбирается, чтобы быть, по большей части, меньшим из первого максимального крутящего момента вокруг вертикальной оси и второго максимального крутящего момента вокруг вертикальной оси. Предварительно определенный крутящий момент вокруг вертикальной оси транспортного средства выбирается, чтобы быть равным меньшему из максимальных крутящих моментов вокруг вертикальной оси, по большей части, или предварительно определенный крутящий момент вокруг вертикальной оси транспортного средства может быть выбран, чтобы быть меньше меньшего из максимальных крутящих моментов вокруг вертикальной оси на запас безопасности, выбранный, чтобы добиваться целей безопасности.
[0035] Далее, на этапе 320 выбирается предварительно определенное значение момента руления. Момент руления определяется в данном документе как крутящий момент, прикладываемый к рулевой колонке 52, такой как крутящий момент, прикладываемый рулевым актуатором 50 на рулевой колонке 52 или другим компонентом рулевой системы 36, и может быть измерен в единицах крутящего момента, например, Ньютон-метрах. Предварительно определенное значение момента руления является моментом руления, создающим предварительно определенный крутящий момент вокруг вертикальной оси транспортного средства в отсутствие других усилий или воздействий на транспортное средство 30.
[0036] Далее, на этапе 325, выбирается предварительно определенное значение чистого асимметричного тормозного усилия. Предварительно определенное значение чистого асимметричного тормозного усилия является чистым асимметричным тормозным усилием, создающим предварительно определенный крутящий момент вокруг вертикальной оси транспортного средства в отсутствие других усилий или воздействий на транспортное средство 30.
[0037] Далее, на этапе 330, предварительно определенное значение момента руления и предварительно определенное значение чистого асимметричного тормозного усилия сохраняются в памяти, с тем, чтобы быть доступными посредством программных инструкций, исполняемых процессором, компьютера 34. После этапа 330 процесс 300 заканчивается.
[0038] Фиг. 4 - это блок-схема последовательности операций процесса, иллюстрирующая примерный процесс 400 для управления движением транспортного средства 30. Компьютер 34 программируется с этапами процесса 400. Процесс 400 может препятствовать срабатыванию рулевой системы 36 сверх предела, при котором тормозная система 36 может брать на себя управление в случае, когда рулевая система 36 отказала, и процесс 400 описывает, как тормозная система 38 будет брать на себя управление, если рулевая система 36 отказала. Компьютер 34 может использовать процесс, когда транспортное средство 30 эксплуатируется автономно, или когда транспортное средство 30 эксплуатируется полуавтономно.
[0039] Процесс 400 начинается на этапе 405. На этапе 405 компьютер 34 определяет, выполняет ли транспортное средство 30 поворот, т.е., прикладывает ли рулевая система 36 момент руления. Поворот может быть выбран алгоритмом автономного или полуавтономного управления транспортным средством, который известен, для навигации транспортного средства 30 к пункту назначения. Соответственно, поворот может быть определен посредством наблюдения выходного значения такого алгоритма управления. Дополнительно или альтернативно, компьютер 34 может получать информацию об угле поворота управляемых колес из сети связи транспортного средства 30 и обнаруживать поворот, когда угол поворота управляемых колес превышает предварительно определенное пороговое значение, например, десять градусов. Если транспортное средство 30 не поворачивает, процесс 400 продолжается на этапе 415 решения.
[0040] Если транспортное средство 30 поворачивает, следом за этапом 405, на этапе 410, компьютер 34 выдает команду на прикладывание момента вплоть до предварительно определенного значения момента руления. Более конкретно, компьютер 34 выдает команду рулевому актуатору 50 прикладывать момент руления, как определено, например, алгоритмом автономного управления транспортным средством, но ограниченный не более чем предварительно определенным значением момента руления. Предварительно определенное значение момента руления является значением, сохраненным в памяти компьютера 34, например, как описано выше. После этапа 410 процесс 400 продолжается на этапе 415 решения.
[0041] После этапа 405 решения, если транспортное средство 30 не поворачивает, или после этапа 410, если транспортное средство 30 поворачивает, на этапе 415 решения, компьютер 34 определяет, тормозит ли транспортное средство 30, т.е., прикладывает ли тормозная система 38 тормозное усилие. Торможение может быть выбрано посредством алгоритма автономного или полуавтономного управления транспортным средством, который известен, для навигации транспортного средства 30 к пункту назначения. Торможение может также быть выбрано, например, посредством электронной системы управления устойчивостью, которая известна, для противодействия проскальзыванию одного или более ходовых колес 46. Если транспортное средство 30 не тормозит, процесс 400 продолжается на этапе 425 решения.
[0042] Если транспортное средство 30 тормозит, следом за этапом 415, на этапе 420, компьютер 34 выдает команду на прикладывание тормозного усилия вплоть до предварительно определенного значения чистого асимметричного тормозного усилия. Более конкретно, компьютер 34 выдает команду тормозной системе 38 прикладывать асимметричное тормозное усилие, как определено, например, алгоритмом автономного управления транспортным средством или алгоритмом электронного управления устойчивостью, ограниченное не более чем предварительно определенным значением чистого асимметричного тормозного усилия. Тормозная система 38 может прикладывать асимметричное тормозное усилие посредством каждого тормоза 56, прикладывающего тормозное усилие, отличное от другого тормоза 56. Предварительно определенное значение чистого асимметричного тормозного усилия является значением, сохраненным в памяти компьютера 34, например, как описано выше.
[0043] После этапа 414 решения, если транспортное средство 30 не тормозит, или после этапа 420, если транспортное средство 30 тормозит, тогда, на этапе 425 решения, компьютер 34 определяет, является ли рулевая система 36 рабочей, т.е., переводятся ли команды от компьютера 34 для предполагаемых действий руления в поворот ходовых колес 46. Если рулевая система 36 является рабочей, процесс 400 продолжается на этапе 445 решения.
[0044] Если рулевая система 36 является нерабочей, следом за этапом 425, на этапе 430, компьютер 34 выдает команду тормозной системе 38 прикладывать чистое асимметричное тормозное усилие; т.е., в ответ на нерабочее состояние рулевой системы 36, компьютер 34 выдает команду тормозной системе 38 прикладывать чистое асимметричное тормозное усилие. "В ответ на" в контексте этого описания означает "как следствие" или "вызванное посредством". Чистое асимметричное тормозное усилие выбирается так, что крутящий момент вокруг вертикальной оси, получающийся в результате непосредственно чистого асимметричного тормозного усилия, приблизительно равен крутящему моменту вокруг вертикальной оси, получающемуся в результате момента руления непосредственно перед отказом рулевой системы 36. Таким образом, крутящий момент вокруг вертикальной оси, испытываемый транспортным средством 30 перед и после отказа, т.е., нерабочего состояния, рулевой системы 36, является одинаковым, и транспортное средство 30 способно продолжать двигаться по пути, выбранному, например, алгоритмом автономного управления транспортным средством. Прикладывание чистого асимметричного тормозного усилия будет также прикладывать тормозное усилие к транспортному средству 30, замедляющее транспортное средство 30 и уменьшающее крутящий момент вокруг вертикальной оси, требуемый, чтобы продолжать движение через поворот на маршруте.
[0045] Далее, на этапе 435, компьютер 34 выдает команду тормозной системе 38 прикладывать тормозное усилие к транспортному средству 30 сверх тормозного усилия от чистого асимметричного тормозного усилия. Тормозное усилие может быть выбрано, чтобы приводить транспортное средство 30 к остановке. Транспортное средство 30 может следовать другим маневрам, выбранным алгоритмом автономного управления транспортным средством, таким как подъезд к обочине дороги.
[0046] Далее, на этапе 440, компьютер 34 предоставляет предупреждение пассажиру транспортного средства 30. Компьютер 34 может инструктировать пользовательскому интерфейсу 44 предоставлять предупреждение, например, звуковое предупреждение, такое как звуковой сигнал или предварительно записанное сообщение, или визуальное предупреждение, такое как индикаторная лампа или сообщение на экране. После этапа 440 процесс 400 заканчивается.
[0047] Если рулевая система 36 является рабочей, после этапа 425 решения, на этапе 445 решения, компьютер 34 определяет, движется ли все еще транспортное средство 30, например, эксплуатируется на выбранном маршруте до пункта назначения. Если транспортное средство 30 все еще движется, процесс 400 возвращается к этапу 405 решения, чтобы начинать процесс 400 снова. Если транспортное средство 30 не движется, например, достигло своего пункта назначения или припарковано, процесс 400 заканчивается.
[0048] Употребление существительного в единственном числе, должно пониматься как означающее одно или более, если не указано иное или контекст не требует иного. Фраза "на основе" охватывает частично или полностью на основе.
[0049] Вычислительные устройства, поясненные в данном документе, в общем, включают в себя инструкции, выполняемые посредством одного или более вычислительных устройств, к примеру, идентифицированных выше, и для выполнения блоков или этапов процессов, описанных выше. Термины "вычислительное устройство" и "компьютер" могут быть использованы взаимозаменяемо в этом описании. Компьютерно-исполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения и отдельно или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем, процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя и т.д. и выполняет эти инструкции, за счет этого выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и передаваться с помощью множества компьютерно-читаемых носителей. Файл в вычислительном устройстве 105, в целом, является совокупностью данных, сохраненных на считываемом компьютером носителе, таком как носитель хранения, оперативное запоминающее устройство и т.д.
[0050] Компьютерно-читаемый носитель включает в себя любой носитель, который участвует в предоставлении данных (например, инструкций), который может быть считан посредством компьютера. Такой носитель может принимать множество форм, включающих в себя, но не только, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители включают в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[0051] Что касается носителей, процессов, систем, способов и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Например, в процессе 600, один или более этапов могут пропускаться, или этапы могут выполняться в порядке, отличном от порядка, показанного на фиг. 6. Другими словами, описания систем и/или процессов в данном документе предоставляются в целях иллюстрации конкретных вариантов осуществления и никоим образом не должны истолковываться так, чтобы ограничивать раскрытый предмет изобретения.
[0052] Соответственно, следует понимать, что настоящее раскрытие сущности, включающее в себя вышеприведенное описание и прилагаемые чертежи и нижеприведенную формулу изобретения, имеет намерение быть иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от предоставленных примеров, будут понятны специалистам в области техники по прочтении вышеприведенного описания. Рамки изобретения должны быть определены, не со ссылкой на вышеприведенное описание, но должны вместо этого быть определены со ссылкой на прилагаемую формулу изобретения, вместе с полными рамками эквивалентов, к которым такие пункты формулы приписаны. Ожидается и предполагается, что будущие разработки произойдут в технологиях, обсужденных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. В общем, следует понимать, что раскрытый предмет изобретения допускает модификацию и варьирование.
Реферат
Предложена система для управления рулением и торможением, содержащая компьютер. Компьютер запрограммирован с возможностью выдавать команду на прикладывание момента или вплоть до предварительно определенного значения момента руления, или вплоть до предварительно определенного значения чистого асимметричного тормозного усилия. При этом каждое предварительно определенное значение выбирается, чтобы добиваться предварительно определенного крутящего момента вокруг вертикальной оси транспортного средства на транспортном средстве, который по большей части является наименьшим из первого максимального крутящего момента вокруг вертикальной оси, получающегося в результате приведения в действие рулевой системы, и второго максимального крутящего момента вокруг вертикальной оси, получающегося в результате приведения в действие тормозной системы. Предложен также способ для управления рулением и торможением. Достигается повышение устойчивости. 2 н. и 15 з.п. ф-лы, 4 ил.
Комментарии