Микрохирургическое устройство - RU2432929C2
Код документа: RU2432929C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение, в целом, относится к микрохирургическим инструментам. Более конкретно, но не для ограничения, настоящее изобретение относится к микрохирургическим инструментам, имеющим порт для отсасывания и резания ткани.
Уровень техники, предшествующий изобретению
Многие микрохирургические процедуры требуют высокоточного резания и/или удаления различных тканей тела. Например, некоторые офтальмологические хирургические процедуры требуют резания и/или удаления стекловидного тела, прозрачного покрытия из студенистого вещества, заполняющего задний сегмент глаза. Стекловидное или гиалиновое тело состоит из многочисленных микроскопических волокон, которые часто прикреплены к сетчатке. Поэтому резание и удаление стекловидного тела должно делаться с большой осторожностью, чтобы избежать натяжения на сетчатке, отделения сетчатки от сосудистой оболочки, разрыва сетчатки или, в самом худшем случае, разреза и удаления самой сетчатки.
Использование микрохирургических режущих зондов в офтальмологической хирургии на заднем сегменте глаза известно. Такие витрэктомические зонды обычно вводятся через надрез в склере около pars plana. Во время хирургии заднего сегмента хирург может также вводить другие микрохирургические инструменты, такие как оптоволоконный светильник, инфузионные канюли или аспирационный зонд. Хирург выполняет процедуру просмотра склеры глаза под микроскопом.
Традиционные витрэктомические зонды обычно содержат полый наружный режущий элемент, полый внутренний режущий элемент, установленный по оси и способный двигаться внутри полого наружного режущего элемента, и порт, радиально расширяющийся через наружный режущий элемент вблизи его дистального конца. Стекловидное тело засасывается в открытый порт и внутренний элемент приводится в действие, закрывая порт. После смыкания режущих поверхностей порта внутренний и наружный режущие элементы действуют совместно, чтобы разрезать стекловидное тело, и разрезанное стекловидное тело затем отсасывается через внутренний режущий элемент. Патенты США №4 577 629 (Martinez); 5 019 035 (Missirlian и др.); 4 909 249 (Akkas и др.); 5 176 628 (Charles и др.); 5 047 008 (Juan и др.); 4 696 298 (Higgins и др.); и 5 733 297 (Wang) раскрывают различные типы витрэктомических зондов и каждый из этих патентов включается сюда во всей своей полноте путем ссылки.
Традиционные витрэктомические зонды делятся на зонды "гильотинного типа" и вращающиеся зонды. Зонды гильотинного типа имеют внутренний режущий элемент, совершающий возвратно-поступательные движения вдоль своей продольной оси. Вращающийся зонд имеет внутренний режущий элемент, совершающий возвратно-поступательное движение вокруг своей продольной оси. В обоих типах зондов внутренние режущие элементы приводятся в действие, используя различные способы. Например, внутренний режущий элемент может двигаться из положения открытого порта в положения закрытого порта давлением газа на поршневой или диафрагменный сборочный узел, преодолевающий усилие механической пружины. После снятия давления газа пружина возвращает внутренний режущий элемент из положения закрытого порта в положение открытого порта. В другом примере, внутренний режущий элемент может перемещаться из положения открытого порта в положение закрытого порта, используя первый источник давления газа, и затем может перемещаться из положения закрытого порта в положение открытого порта, используя второй источник давления газа. В качестве другого примера, внутренний режущий элемент может перемещаться электромеханически между открытым и закрытым положениями порта, используя традиционный вращающийся электродвигатель или соленоид. Патент США №4 577 629 представляет пример зонда гильотинного типа, приводимого в действие пневматическим поршнем/механической пружиной. Патенты США №4 909 249 и 5 019 035 раскрывают зонды гильотинного типа, приводимые в действие пневматической диафрагмой/механической пружиной. Патент США №5 176 628 показывает вращающийся зонд с двойным пневматическим приводом.
Во многих традиционных витрэктомических зондах рабочий ход резания внутреннего режущего элемента ограничен контактом с закрытым дистальным концом зонда в конце рабочего хода резания. Такой механизм приведения в действие может затуплять режущие поверхности зонда. Во многих традиционных витрэктомических зондах обратный ход внутреннего режущего элемента ограничивается приводным поршнем или диафрагмой, контактируя со стопорным кольцом. Такая конструкция уменьшает площадь диафрагмы, подвергающуюся рабочему давлению в начале рабочего хода. В традиционных зондах, приводимых в действие пневматическим поршнем (или диафрагмой)/механической пружиной, использование возвратной пружины с предварительным натягом требует относительно больших рабочих давлений, чтобы начать рабочий ход резания. Зонды с возвратной пружиной также обладают нарастающей возвратной силой пружины по мере выполнения рабочего хода резания, которая требует повышенного давления газа для завершения рабочего хода резания. Действие этого ограничения усиливается в современных зондах с более высокими скоростями резания, поскольку более высокие силы предварительного натяга пружины требуют соответственно больших пневматических давлений для приведения в действие. Поэтому существует необходимость улучшенного витрэктомического зонда с более эффективным резанием. Такая эффективность должна облегчить минимизацию общего расхода газа во время приведения в действие зонда и позволить работать при более низких пневматических давлениях и более высоких скоростях резания. Минимизация общего расхода газа особенно важна для применений, в которых пневматическое давление обеспечивается баллоном с воздухом под давлением, который периодически заменяется. Работа при более высоких скоростях резания снижает время аспирации между разрезами и проблемы беспокоящих движений стекловидного тела и сетчатки в течение резания.
Сущность изобретения
В одном аспекте настоящее изобретение является микрохирургическим инструментом, имеющим режущий элемент и корпус. Режущий элемент имеет трубчатый наружный режущий элемент с портом для приема ткани и трубчатый внутренний режущий элемент, расположенный внутри внешнего режущего элемента. Корпус имеет механизм приведения в действие для обеспечения возвратно-поступательного движения внутреннего режущего элемента, так чтобы внутренний режущий элемент открывал и закрывал порт и резал ткань, попадающую в порт. Механизм приведения в действие содержит камеру диафрагмы, имеющую первую часть стенки и вторую часть стенки, твердую центральную опору, расположенную в камере диафрагмы и имеющую первую ограничительную поверхность и вторую ограничительную поверхность, и гибкую диафрагму, присоединенную к центральной опоре и корпусу. После приведения в действие внутреннего режущего элемента первая ограничительная поверхность входит в контакт с первой частью стенки в конце рабочего хода резания внутреннего режущего элемента, а вторая ограничительная поверхность входит в контакт со второй частью стенки в конце обратного хода внутреннего режущего элемента.
Краткое описание чертежей
Для более полного понимания настоящего изобретения и его дальнейших задач и преимуществ ссылка делается на последующее описание в сочетании с сопровождающими чертежами, на которых:
Фиг.1 - вид в перспективе микрохирургического инструмента, соответствующего предпочтительному варианту осуществления настоящего изобретения;
Фиг.2 - вид в плане микрохирургического инструмента, показанного на фиг.1;
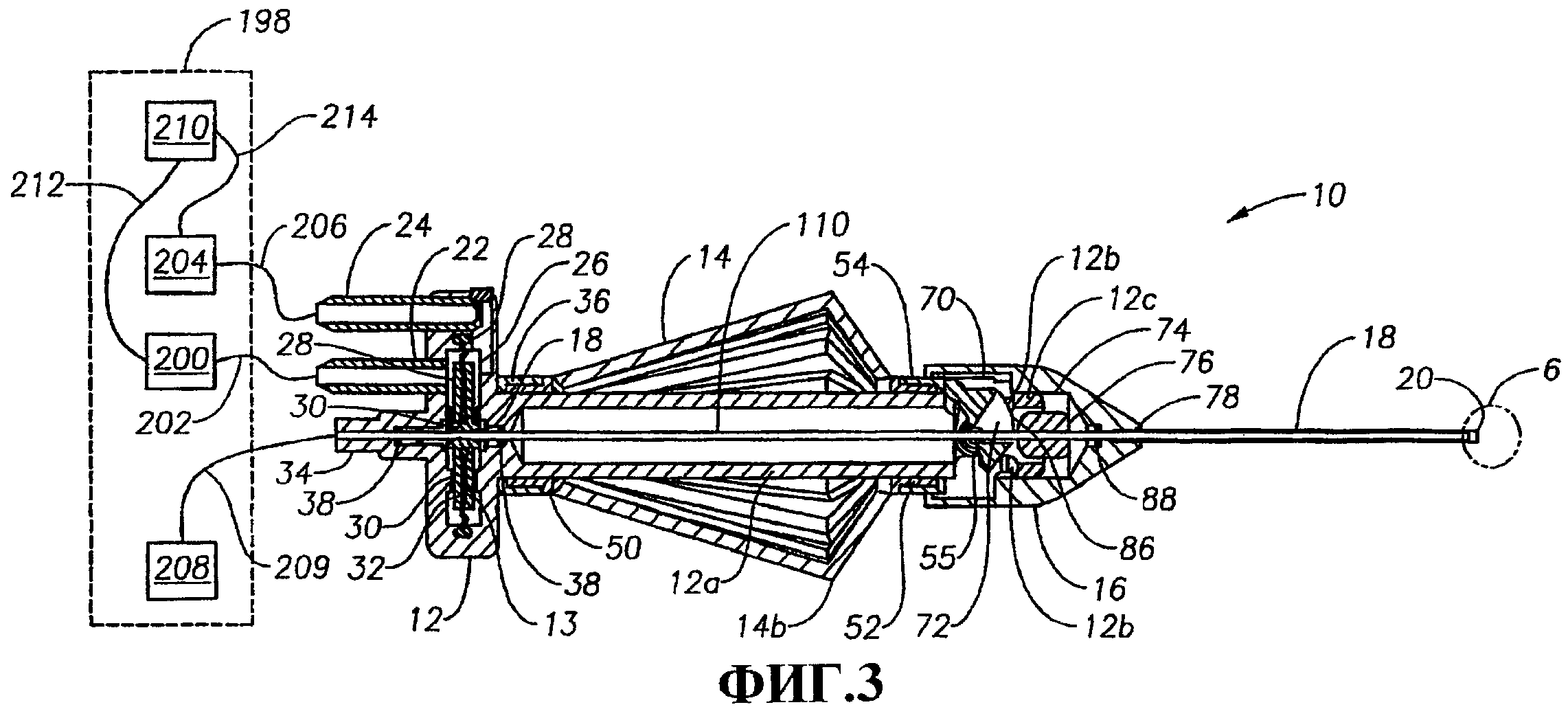
Фиг.3 - вид сбоку в разрезе микрохирургического инструмента, показанного на фиг.1, с рабочими подключениями к микрохирургической системе;
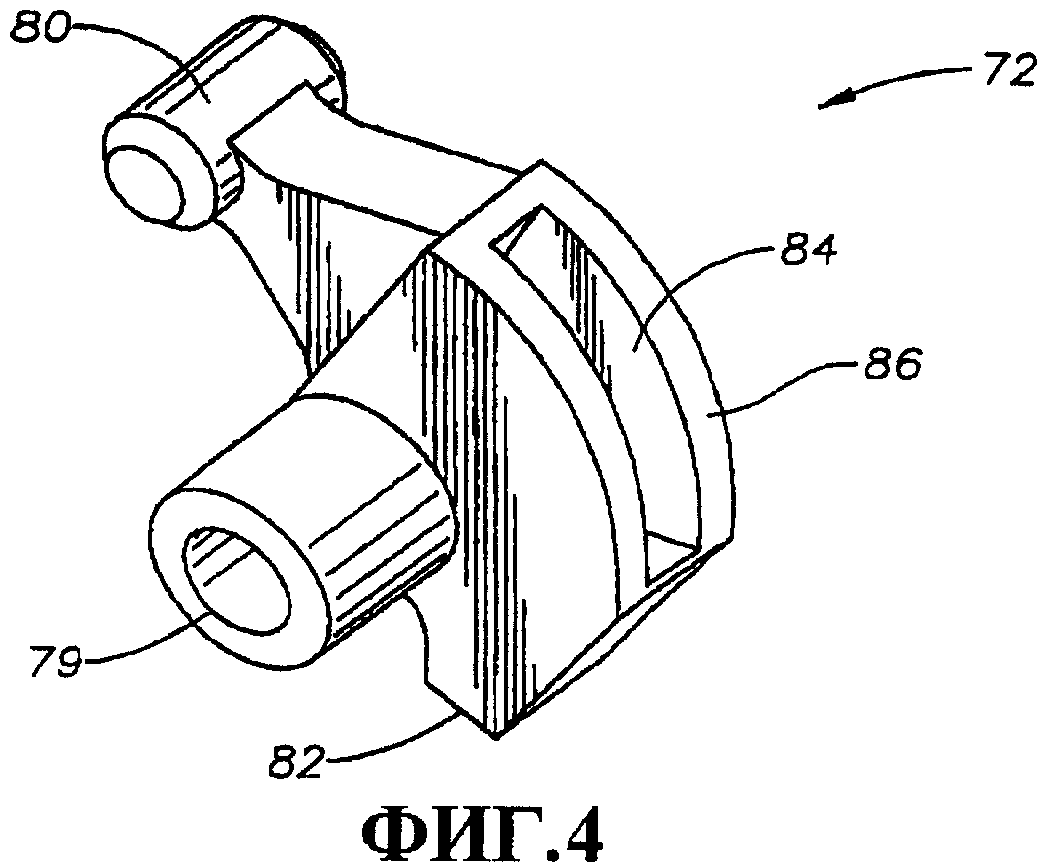
Фиг.4 - увеличенный вид в перспективе кулачкового элемента микрохирургического инструмента, показанного на фиг.1;
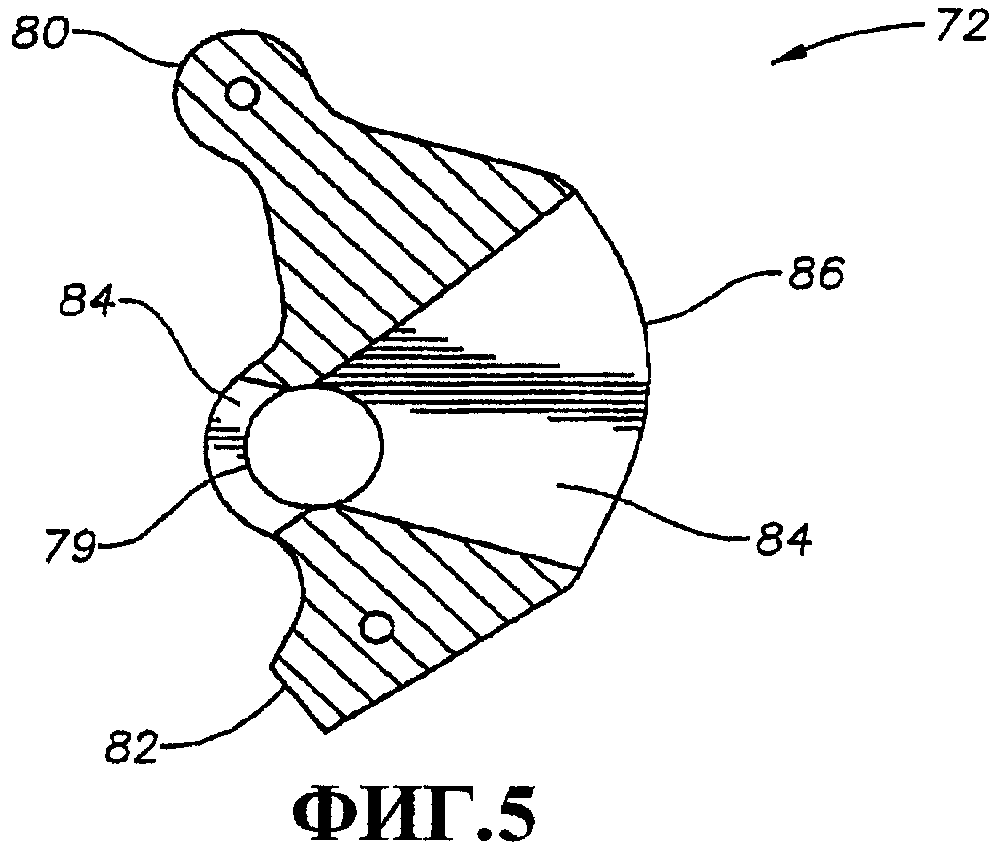
Фиг.5 - вид в разрезе кулачкового элемента, показанного на фиг.4;
Фиг.6 - увеличенный фрагмент вида сбоку в разрезе части микрохирургического инструмента, показанного на фиг.1, для части, показанной в кружке 6 на фиг.2; и
Фиг.7 - увеличенный фрагмент вида сбоку в разрезе части механизма приведения в действие микрохирургического инструмента, показанного на фиг.1.
Подробное описание предпочтительных вариантов осуществления
Предпочтительные варианты осуществления настоящего изобретения и их преимущества наилучшим образом могут быть поняты при обращении к чертежам 1-7, где схожие номера используются для схожих и соответствующих частей различных чертежей.
Микрохирургический инструмент 10 предпочтительно содержит корпус 12, ручку 14 приведения в действие, элемент 16 насадки и режущий элемент 18, имеющий дистальный наконечник 20. Как показано на чертежах, микрохирургический инструмент 10 является витрэктомическим зондом. Однако микрохирургический инструмент 10 может быть любым микрохирургическим режущим, аспирационным или инфузионным зондом.
Корпус 12 содержит механизм 13 приведения в действие для приведения в действие трубчатого внутреннего режущего элемента 110 режущего элемента 18, заставляя его совершать возвратно-поступательные движения. Механизм 13 приведения в действие предпочтительно содержит первый пневматический порт 22, второй пневматический порт 24, камеру 26 диафрагмы, гибкую диафрагму 28 и твердую центральную опору 30. Гибкая диафрагма 28 присоединена к центральной опоре 30 и корпусу 12. Как показано на чертежах, гибкая диафрагма 28 фрикционно соединена как с центральной опорой 30, так и с корпусом 12. Альтернативно, гибкая диафрагма 28 может быть фрикционно соединена с корпусом 12 и упираться в центральную опору 30. Центральная опора 30 имеет ограничительные поверхности 31a и 31b для взаимодействия с частями 33a и 33b стенки камеры 26 диафрагмы соответственно. Корпус 12 дополнительно содержит аспирационный порт 34 и дистальную часть 12a, имеющую отверстие 12b и дистальный наконечник 12c. Втулка 36 соединяет дистальную часть 12a с ручкой 14 механизма приведения в действие. Внутренний режущий элемент 110 соединен с центральной опорой 30 и имеет скользящее и подвижное соединение с корпусом 12 через уплотнительные кольца 38.
Ручка 14 механизма приведения в действие предпочтительно содержит проксимальное основание 50, дистальное основание 52 и множество гибких связей 14a, присоединенных к обоим основаниям 50 и 52. Гибкие связи 14a могут быть выполнены из любого подходящего пружинящего материала, обладающего памятью, такого как титан, нержавеющая сталь или подходящая термопластмасса. Ручка 14 окружает дистальную часть 12a корпуса 12. Проксимальное основание 50 соединено с втулкой 36. Дистальное основание 52 входит внутрь скользящей втулки 54. Пользователь захватывает микрохирургический инструмент 10 за ручку 14. Когда пользователь давит на гибкие связи 14a, гибкие связи 14a изгибаются в местах 14b или вблизи них, выпрямляя и удлиняя гибкие связи 14a и перемещая втулку 54 в направлении дистального наконечника 20. Когда такое давление прекращается, пружина 55 возвращает гибкие связи 14a в положение, показанное на фиг.2.
Элемент 16 насадки предпочтительно содержит камеру 70 кулачка для размещения кулачкового элемента 72, основную камеру 74 для направления дистального наконечника 12c корпуса 12, втулку 76 для направления внутреннего режущего элемента 110 режущего элемента 18 и выпуск 78 для направления трубчатого внешнего режущего элемента 100 режущего элемента 18. Кулачковый элемент 72 вращательно соединен с элементом 16 насадки внутри отверстия 12b корпуса 12 через установочные штифты (не показаны), вставленные в каждом конце канала 79. Кулачковый элемент 72 предпочтительно имеет первую стопорящую поверхность 80 для сопряжения с втулкой 54, вторую стопорящую поверхность 82 для сопряжения с корпусом 12, прорезанное отверстие 84 для направления внутреннего режущего элемента 110 режущего элемента 18 и кулачковую поверхность 86 для сопряжения с втулкой 76. Уплотнительное кольцо 88 скользит и свободно движется и герметизирует элемент 16 наконечника относительно внутреннего режущего элемента 110.
Как описано выше, режущий элемент 18 предпочтительно содержит трубчатый наружный режущий элемент 100 и трубчатый внутренний режущий элемент 110. Наружный режущий элемент 100 имеет внутренний канал 102, закрытый конец 104, порт 106 для приема ткани и режущие поверхности 108. Внутренний режущий элемент 110 имеет внутренний канал 112, открытый конец 114 и режущую поверхность 116.
Во время работы витрэктомический зонд 10 присоединен к микрохирургической системе 198. Более конкретно, пневматический порт 22 подвижно соединен с источником 200 давления газа с помощью подвижной линии 202, пневматический порт 24 подвижно соединен с источником 204 давления газа с помощью подвижной линии 206 и аспирационный порт 34 подвижно соединен с источником вакуума 208 через подвижную линию 209. Внутренний канал 112 и подвижная линия 209 заливаются хирургической жидкостью. Микрохирургическая система 198 также имеет микропроцессор или компьютер 210, электрически соединенный с источниками 200 и 204 давления газа через устройства 212 и 214 сопряжения соответственно.
Хирург вводит дистальный наконечник 20 в задний сегмент глаза, используя вставку через область pars plana. Хирург выбирает желательный уровень вакуума для источника 208 вакуума. Ткань отсасывается во внутренний канал 112 через порт 106. Хирург выбирает желаемую скорость резания для зонда 10, используя микропроцессор 210 и, по желанию, устройство линейного регулирования (не показано), такое как ножной регулятор. Более конкретно, микропроцессор 210 использует источники 200 и 204 давления газа, чтобы создать циклический перепад давления на диафрагме 28 для возвратно-поступательного движения центральной опоры 30 и тем самым внутреннего режущего элемента 110 с желаемой скоростью резания. Когда давление, обеспечиваемое в пневматическом порту 22, больше, чем давление, обеспечиваемое в пневматическом порту 24, внутренний режущий элемент 110 перемещается в направлении дистального наконечника 20 до тех пор, пока открытый конец 114 не пройдет режущую поверхность 108, как показано на фиг.6. Тем самым порт 106 закрывается, позволяя режущим поверхностям 108 и 116 отрезать ткань внутри внутреннего канала 112.
Отрезанная ткань отсасывается сквозь внутренний канал 112, аспирационный порт 34, жидкостную линию 209 и в камеру сборника (не показана). Когда давление, прикладываемое к пневматическому порту 24, больше, чем давление, прикладываемое к пневматическому порту 22, внутренний режущий элемент 110 движется в направлении от дистального наконечника 20, открывая порт 106 и позволяя дальнейшее отсасывание ткани.
В течение приведения в действие внутреннего режущего элемента 110 ограничительная поверхность 31а центральной опоры 30 контактирует с частью 33а стенки камеры 2 6 диафрагмы, чтобы точно закончить рабочий ход резания. Ограничительная поверхность 31b центральной опоры 30 контактирует с частью 33b стенки камеры 26 диафрагмы, чтобы точно закончить обратный ход. Когда ограничительная поверхность 31а контактирует с частью 33а стенки, режущая поверхность 116 открытого конца 114 внутреннего режущего элемента 110 предпочтительно располагается у или почти сразу после дистальной режущей поверхности 108 внешнего режущего элемента 100. Когда ограничительная поверхность 31b контактирует с частью 33b стенки, открытый конец 114 предпочтительно располагается у или около проксимальной режущей поверхности 108 внешнего режущего элемента 100. Такое прецизионное управление приводом внутреннего режущего элемента 110 значительно увеличивает эффективность резания зонда 10.
Из вышесказанного можно понять, что настоящее изобретение обеспечивает существенные выгоды по сравнению с традиционными витрэктомическими зондами. Настоящее изобретение продемонстрировано здесь на примере и различные изменения могут быть сделаны специалистом, обладающим обычными знаниями в этой области техники. Например, хотя настоящее изобретение описано выше в связи с витрэктомическим зондом, оно в равной степени применимо к аспирационным зондам, инфузионным зондам и другим режущим зондам.
Предполагается, что работа и конструкция настоящего изобретения будут очевидны из приведенного выше описания. Хотя устройство и способы, показанные или описанные выше, были охарактеризованы как предпочтительные, в нем могут быть сделаны различные изменения и модификации, не отходя от сущности и объема, определенных в последующей формуле изобретения.
Реферат
Изобретение относится к медицинской технике. Устройство содержит режущий элемент с трубчатым наружным режущим элементом с портом для приема ткани. Порт имеет дистальную режущую поверхность и проксимальную режущую поверхность, и трубчатый внутренний режущий элемент, расположенный внутри наружного режущего элемента и имеющий третью режущую поверхность; и корпус, имеющий механизм приведения в действие для возвратно-поступательного движения внутреннего режущего элемента. Внутренний режущий элемент открывает и закрывает порт и режет ткань, попавшую в порт. Механизм приведения в действие содержит: камеру диафрагмы, имеющую первую часть стенки и проксимальную часть стенки; твердую центральную опору, расположенную в камере диафрагмы и имеющую дистальную ограничительную поверхность и проксимальную ограничительную поверхность; и гибкую диафрагму, присоединенную к центральной опоре и корпусу. Применение данного устройства позволит повысить эффективность резания. 3 з.п.ф-лы, 7 ил.
Комментарии