Соединения электродов для хирургических инструментов с поворотным приводом - RU2659629C2
Код документа: RU2659629C2
Чертежи
























































































Описание
Предпосылки создания изобретения
За многие годы были разработаны разнообразные минимально инвазивные роботизированные (или «дистанционные хирургические») системы для повышения манипуляционных возможностей при хирургии, а также для того чтобы хирург мог работать с пациентом интуитивно понятным способом. Многие такие системы описаны в следующих патентах США, каждый из которых полностью включен в настоящий документ путем ссылки: патент США № 5792135, озаглавленный «Шарнирно повернутый хирургический инструмент для выполнения минимально инвазивных хирургических операций с повышенными манипуляционными возможностями и чувствительностью», патент США № 6231565, озаглавленный «Роботизированный манипулятор DLUS для выполнения хирургических задач», патент США № 6783524, озаглавленный «Роботизированный хирургический инструмент с прибором для ультразвукового прижигания и резки», патент США № 6364888, озаглавленный «Выравнивание главной и ведомой части в минимально инвазивном хирургическом приборе», патент США № 7524320, озаглавленный «Система взаимодействия механического активатора для роботизированных хирургических инструментов», патент США № 7691098, озаглавленный «Запястный механизм для присоединения к платформе», патент США № 7806891, озаглавленный «Повторная установка и переориентация отношения типа главный/ведомый при минимально инвазивной дистанционной хирургии», и патент США № 7824401, озаглавленный «Хирургический инструмент с запястными монополярными электрохирургическими концевыми эффекторами». Однако многие такие системы ранее были неспособны развивать диапазон усилий, необходимых для эффективного разрезания и сшивания ткани. Кроме того, существующие роботизированные хирургические системы ограничены по числу разных типов хирургических устройств, с которыми они могут работать.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Особенности и преимущества настоящего изобретения, а также способ их достижения станут более очевидны, а само изобретение станет более понятным после ознакомления со следующим описанием примеров осуществления настоящего изобретения в совокупности с сопроводительными чертежами.
Различные примеры осуществления описаны в настоящем документе на примерах в сочетании со следующими фигурами.
На ФИГ. 1 представлен вид в перспективе одного варианта осуществления роботизированного контроллера.
На ФИГ. 2 представлен вид в перспективе роботизированного штатива хирургической руки-манипулятора/манипулятора роботизированной системы, функционально поддерживающей множество вариантов осуществления хирургических инструментов.
На ФИГ. 3 представлен вид сбоку одного варианта осуществления роботизированного штатива хирургической руки-манипулятора/манипулятора, показанного на ФИГ. 2.
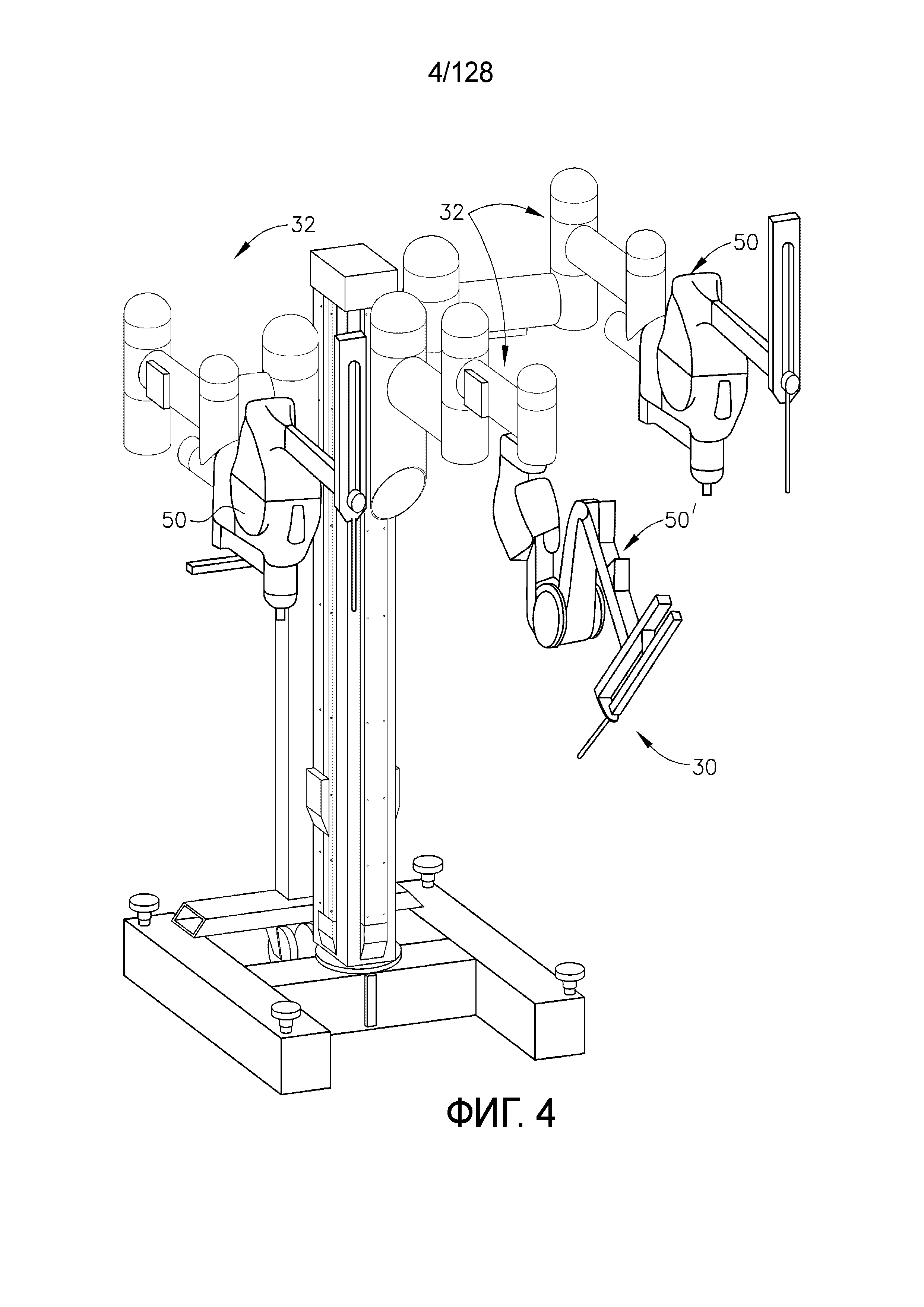
На ФИГ. 4 представлен вид в перспективе структуры штатива с позиционирующими рычажными механизмами для функциональной поддержки роботизированных манипуляторов, которые можно использовать с различными вариантами осуществления хирургических инструментов.
На ФИГ. 5 представлен вид в перспективе варианта осуществления хирургического инструмента и варианта осуществления концевого эффектора.
На ФИГ. 6 представлен вид в перспективе одного варианта осуществления электрохирургического инструмента, находящегося в электрической связи с генератором.
На ФИГ. 7 представлен вид в перспективе одного варианта осуществления концевого эффектора хирургического инструмента, показанного на ФИГ. 6, с открытыми элементами бранши и с дистальным концом перемещаемого по оси элемента в оттянутом положении.
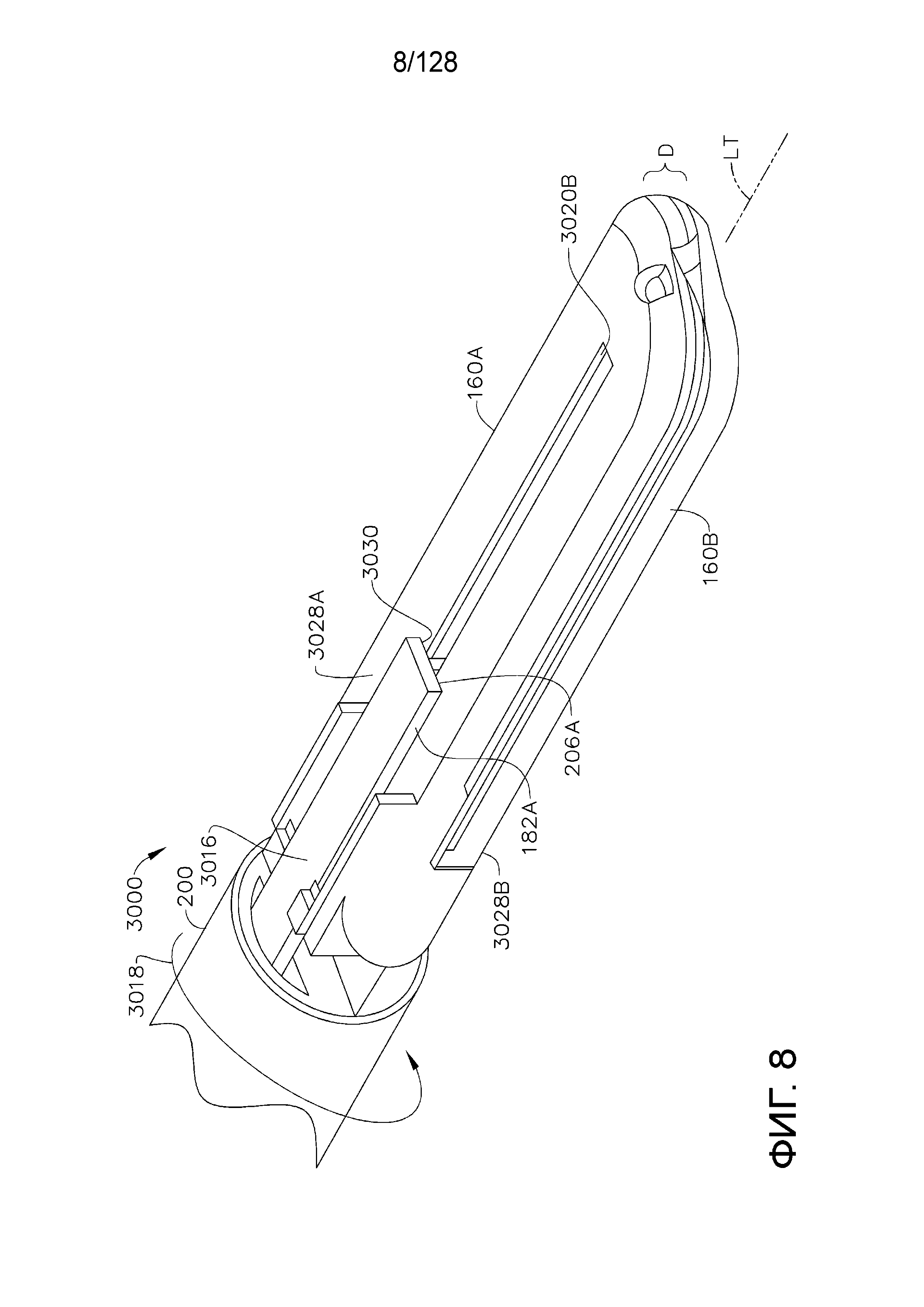
На ФИГ. 8 представлен вид в перспективе одного варианта осуществления концевого эффектора хирургического инструмента, показанного на ФИГ. 6, с закрытыми элементами бранши и с дистальным концом перемещаемого по оси элемента в частично продвинутом положении.
На ФИГ. 9 представлен вид в перспективе одного варианта осуществления перемещаемого по оси элемента хирургического инструмента, показанного на ФИГ. 6.
На ФИГ. 10 представлен вид в сечении одного варианта осуществления электрохирургического концевого эффектора хирургического инструмента, показанного на ФИГ. 6.
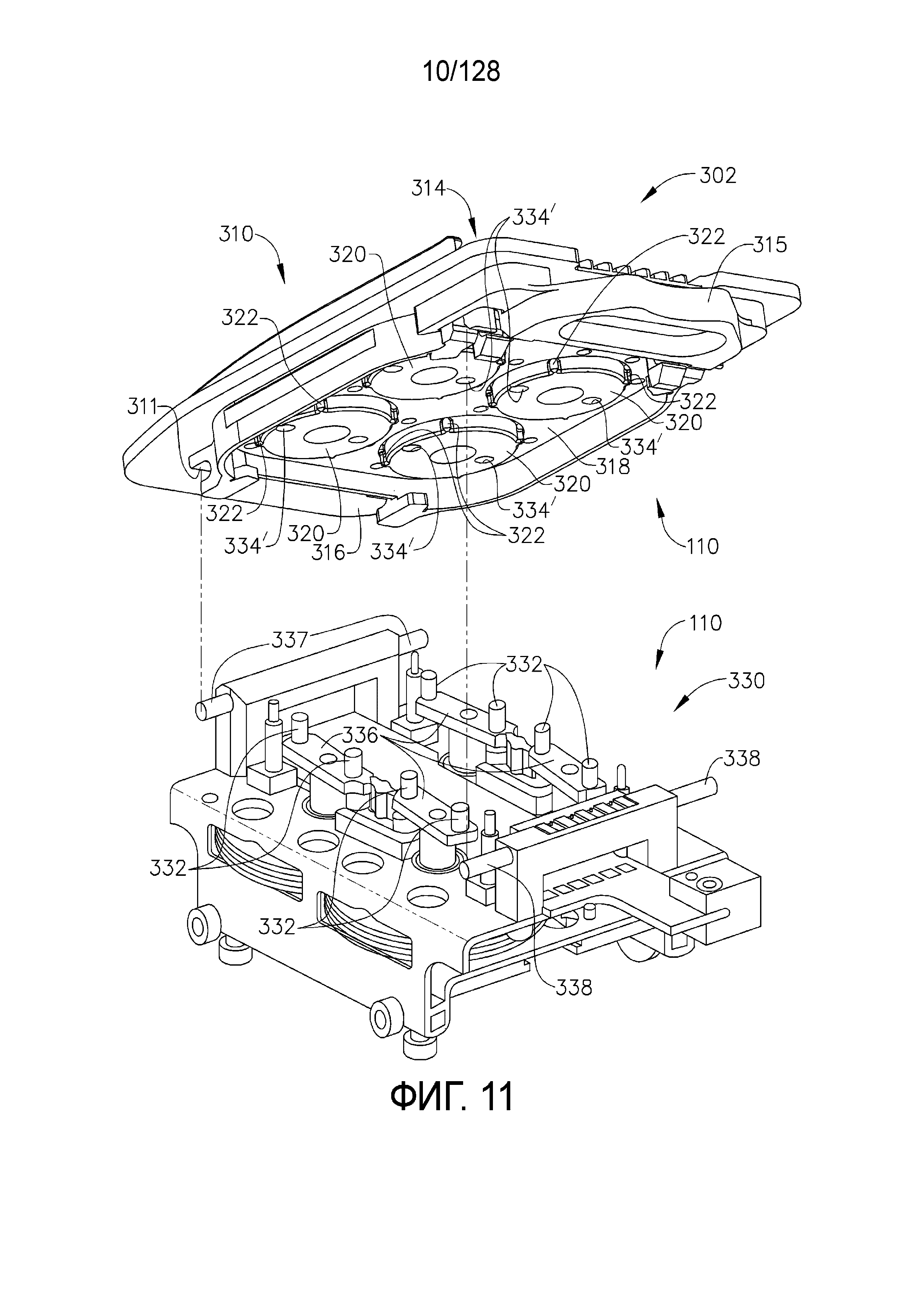
На ФИГ. 11 представлен общий вид с пространственным разделением компонентов одного варианта осуществления адаптера и держателя инструмента для прикрепления различных вариантов хирургического инструмента к роботизированной системе.
На ФИГ. 12 представлен вид сбоку одного варианта осуществления адаптера, показанного на ФИГ. 11.
На ФИГ. 13 представлен вид снизу одного варианта осуществления адаптера, показанного на ФИГ. 11.
На ФИГ. 14 представлен вид сверху одного варианта осуществления адаптера, показанного на ФИГ. 11 и 12.
На ФИГ. 15 представлен частичный вид снизу в перспективе одного варианта осуществления хирургического инструмента.
На ФИГ. 16 представлен вид спереди в перспективе одного варианта осуществления части хирургического инструмента, причем некоторые элементы для ясности не показаны.
На ФИГ. 17 представлен вид сзади в перспективе тыльной стороны одного варианта осуществления хирургического инструмента, показанного на ФИГ. 16.
На ФИГ. 18 представлен вид сверху одного варианта осуществления хирургического инструмента, показанного на ФИГ. 16 и 17.
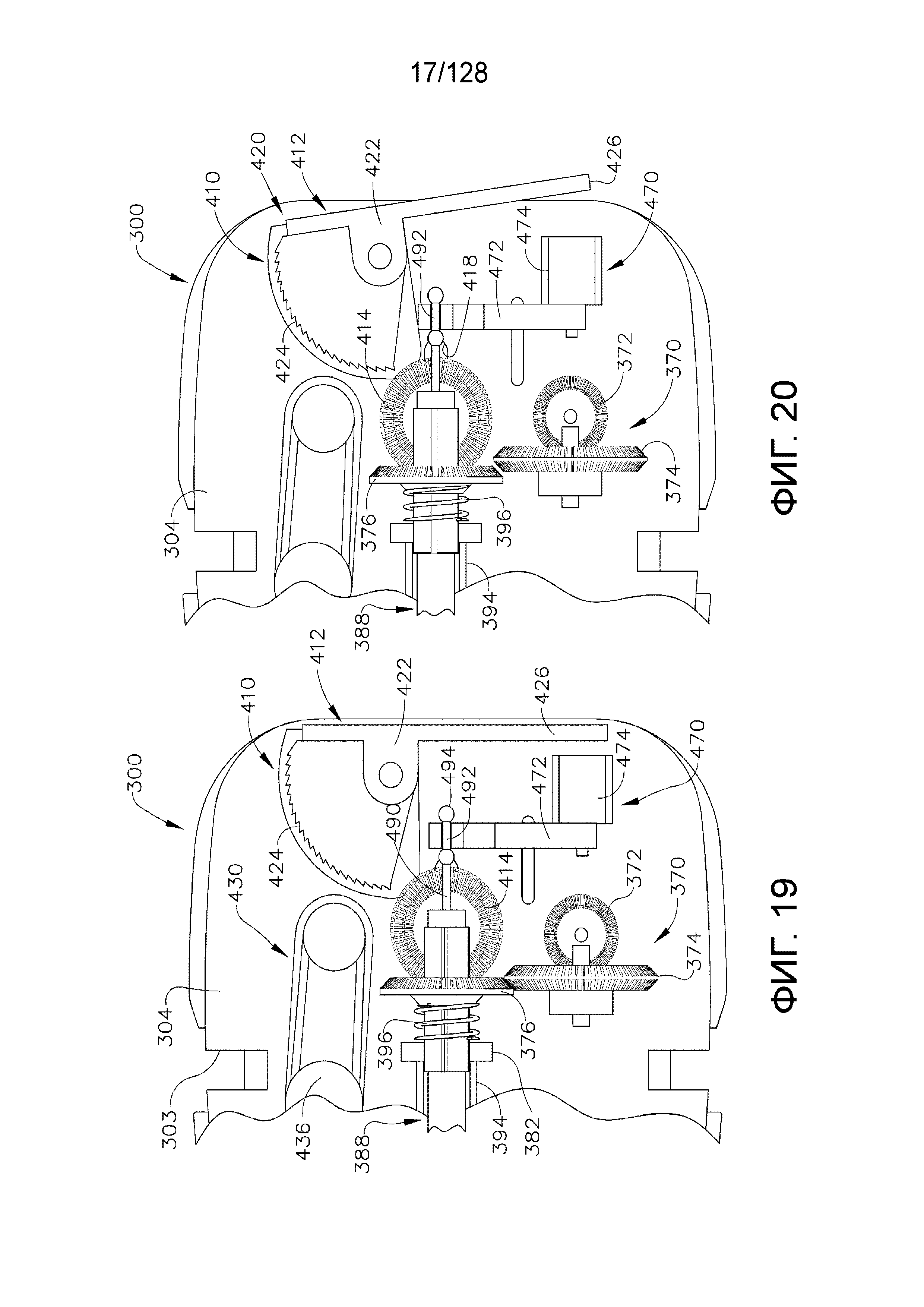
На ФИГ. 19 представлен частичный вид сверху одного варианта осуществления хирургического инструмента, показанного на ФИГ. 16-18, причем приводная шестерня с возможностью ручной активации находится в неактивированном положении.
На ФИГ. 20 представлен другой частичный вид сверху одного варианта осуществления хирургического инструмента, показанного на ФИГ. 16-19, причем приводная шестерня с возможностью ручной активации находится в первично активированном положении.
На ФИГ. 21 представлен другой частичный вид сверху одного варианта осуществления хирургического инструмента, показанного на ФИГ. 16-20, причем приводная шестерня с возможностью ручной активации находится в активированном положении.
На ФИГ. 22 представлен вид сзади в перспективе другого варианта осуществления хирургического инструмента.
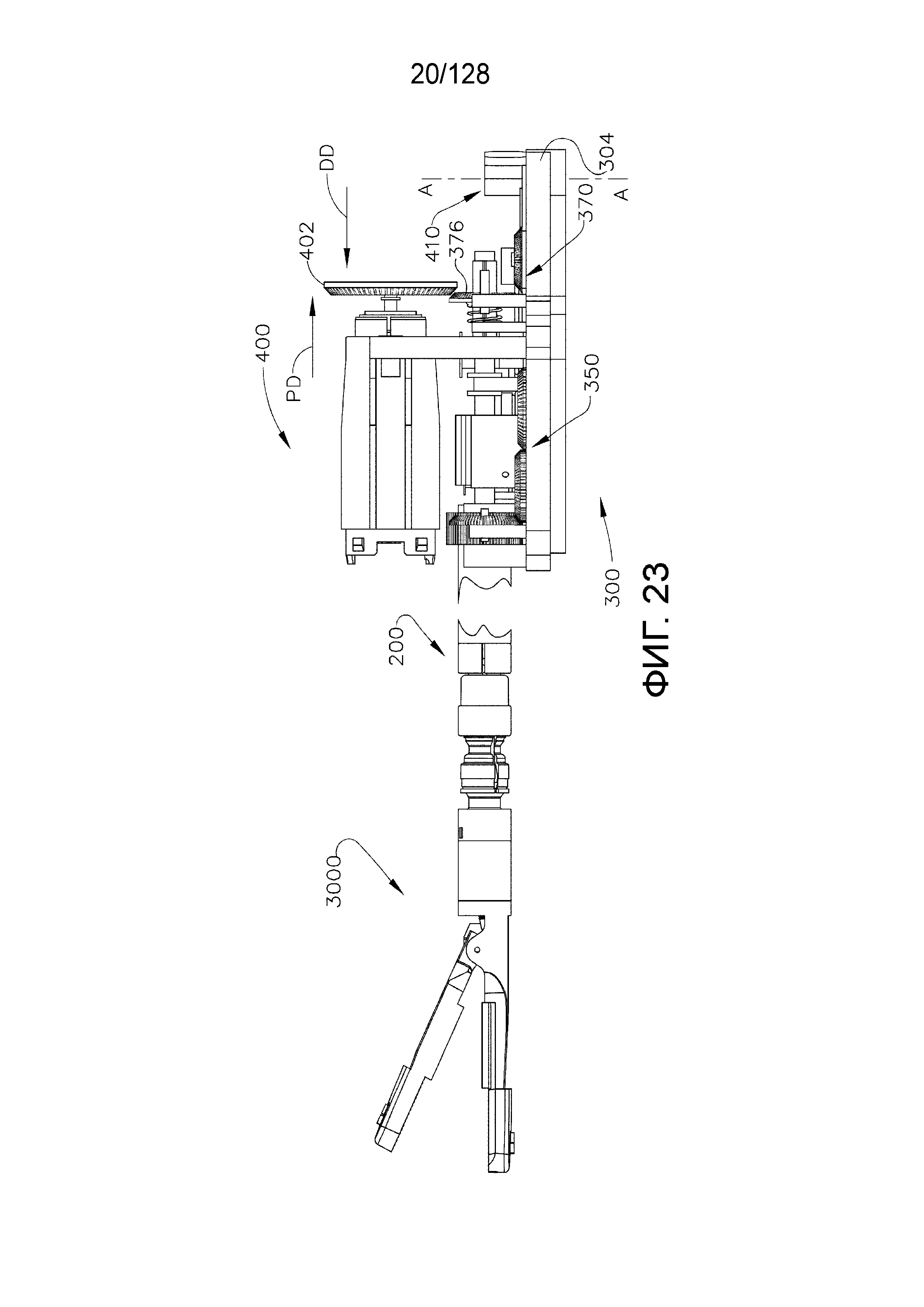
На ФИГ. 23 представлен вид сбоку в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ. 22.
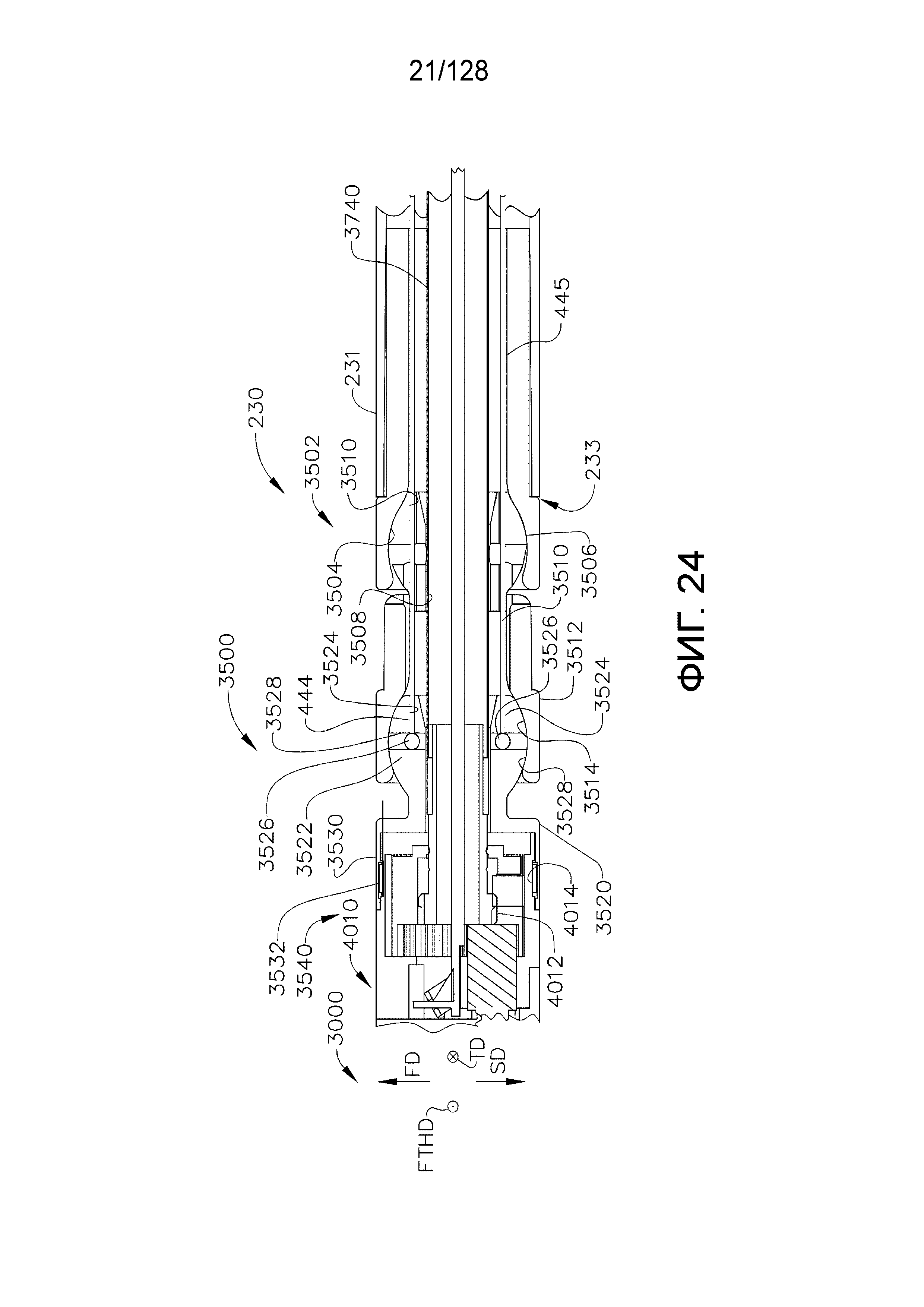
На ФИГ. 24 представлен вид в поперечном сечении одного варианта осуществления части шарнирного сочленения и концевого эффектора.
На ФИГ. 24A представлен один вариант осуществления узла стержня и шарнирного сочленения, показанного на ФИГ. 24, на котором показаны соединения между дистальными секциями кабелей и проксимальными частями кабелей.
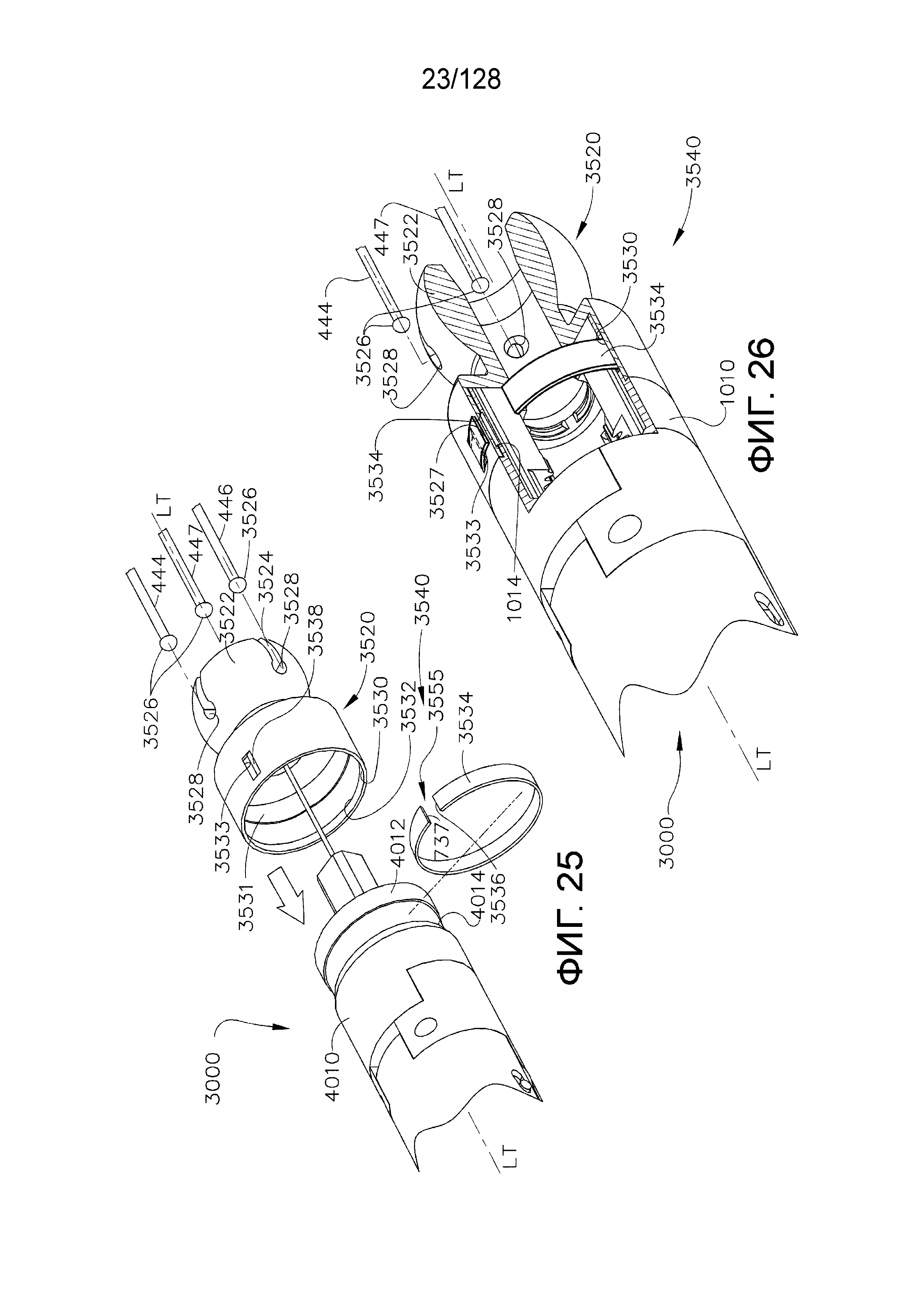
На ФИГ. 25 представлен общий вид с пространственным разделением компонентов одного варианта осуществления части шарнирного сочленения и концевого эффектора, показанного на ФИГ. 24.
На ФИГ. 26 представлен частичный вид в поперечном сечении в перспективе одного варианта осуществления частей шарнирного сочленения и концевого эффектора, показанных на ФИГ. 25.
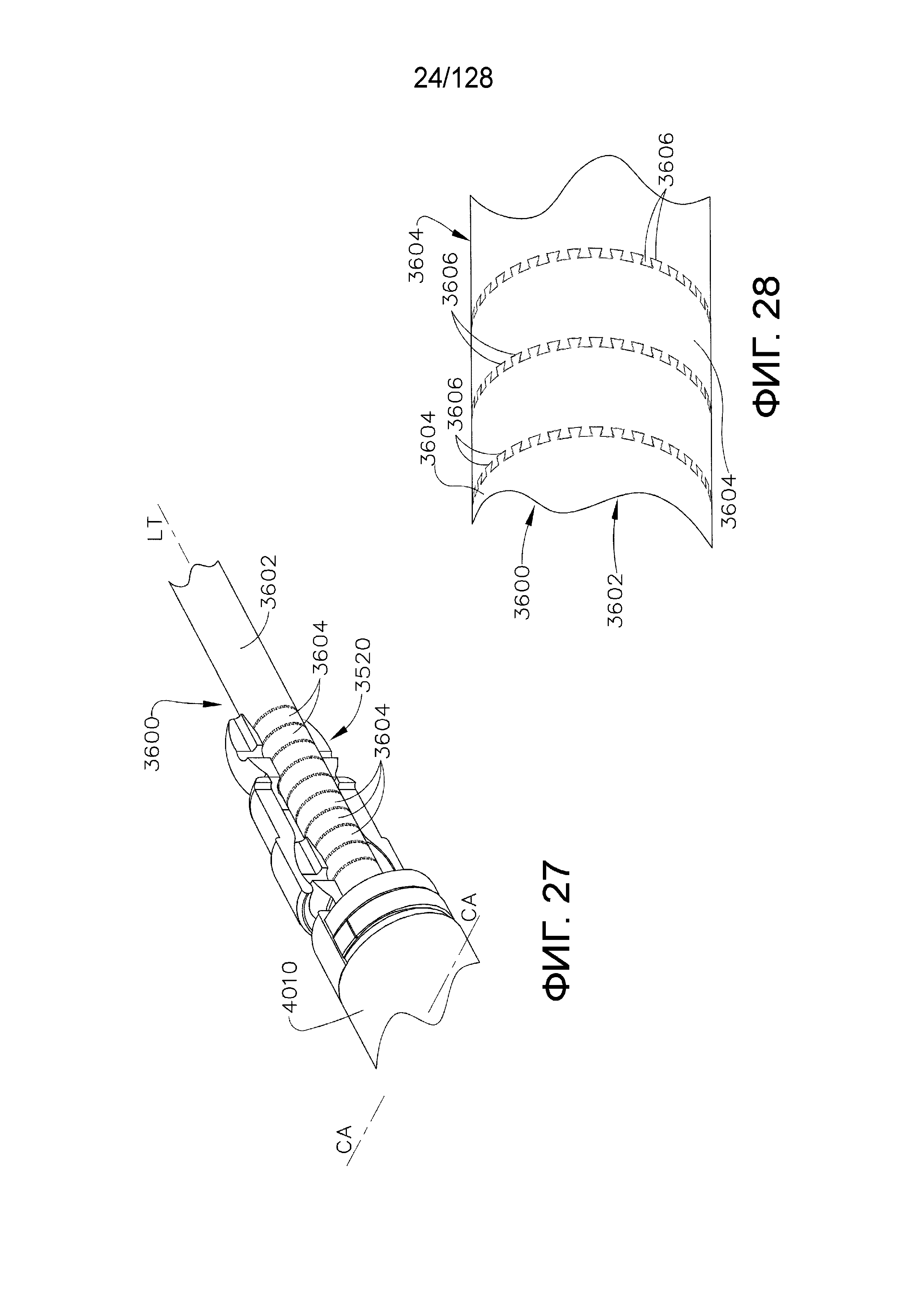
На ФИГ. 27 представлен частичный вид в перспективе варианта осуществления концевого эффектора и узла приводного стержня.
На ФИГ. 28 представлен частичный вид сбоку одного варианта осуществления узла приводного стержня.
На ФИГ. 29 представлен вид в перспективе одного варианта осуществления узла приводного стержня.
На ФИГ. 30 представлен вид сбоку одного варианта осуществления узла приводного стержня, показанного на ФИГ. 29.
На ФИГ. 31 представлен вид в перспективе одного варианта осуществления составного узла приводного стержня.
На ФИГ. 32 представлен вид сбоку одного варианта осуществления составного узла приводного стержня, показанного на ФИГ. 31.
На ФИГ. 33 представлен другой вид одного варианта осуществления узла приводного стержня, показанного на ФИГ. 29 и 30, предполагающего дугообразную или «изогнутую» конфигурацию.
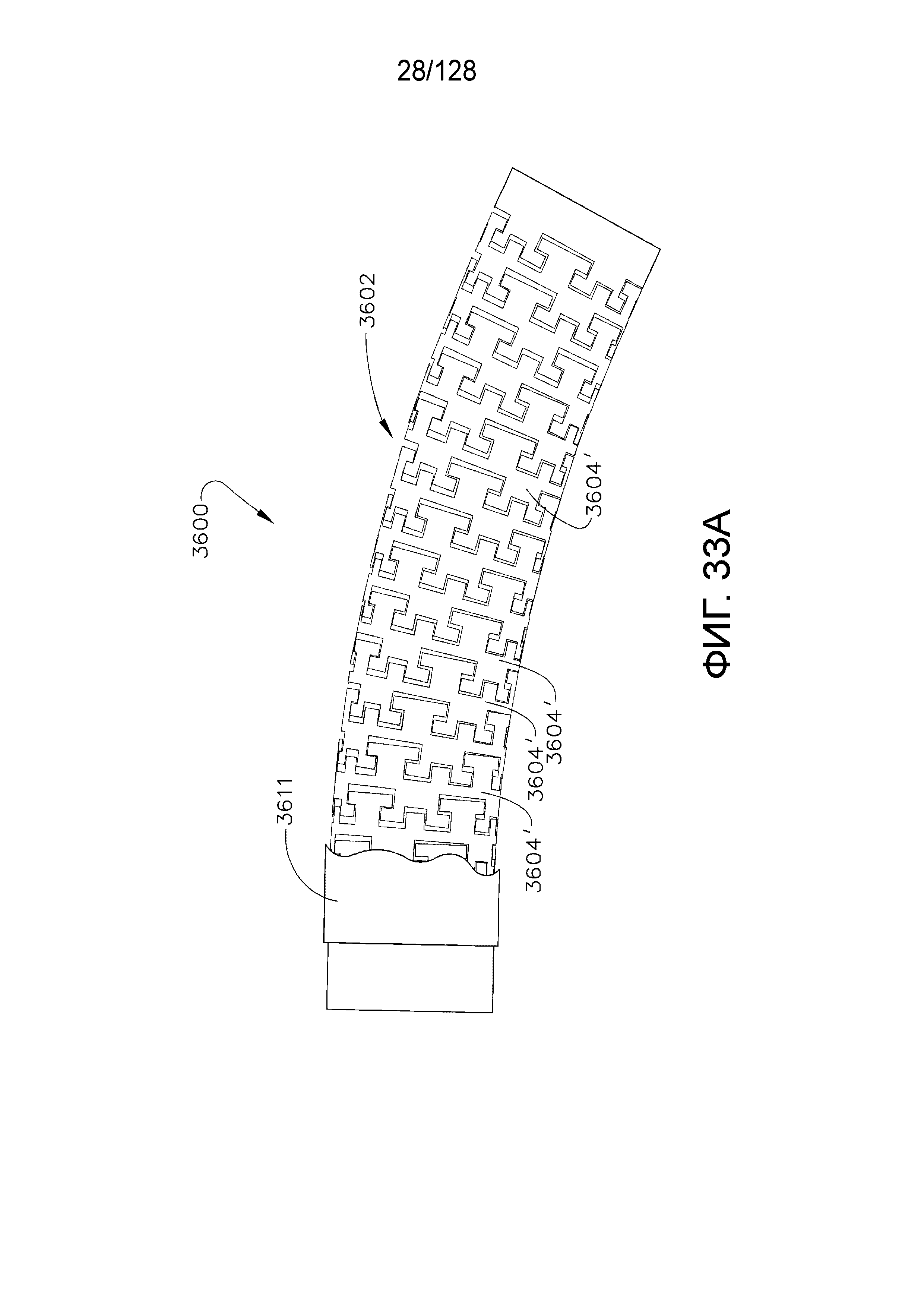
На ФИГ. 33A представлен вид сбоку одного варианта осуществления узла приводного стержня, предполагающего дугообразную или «изогнутую» конфигурацию.
На ФИГ. 33B представлен вид сбоку одного варианта осуществления другого узла приводного стержня, предполагающего дугообразную или «изогнутую» конфигурацию.
На ФИГ. 34 представлен вид в перспективе части другого варианта осуществления узла приводного стержня.
На ФИГ. 35 представлен вид сверху варианта осуществления узла приводного стержня, показанного на ФИГ. -34.
На ФИГ. 36 представлен другой вид в перспективе варианта осуществления узла приводного стержня, показанного на ФИГ. 34 и 35, в дугообразной конфигурации.
На ФИГ. 37 представлен вид сверху варианта осуществления узла приводного стержня, показанного на ФИГ. 36.
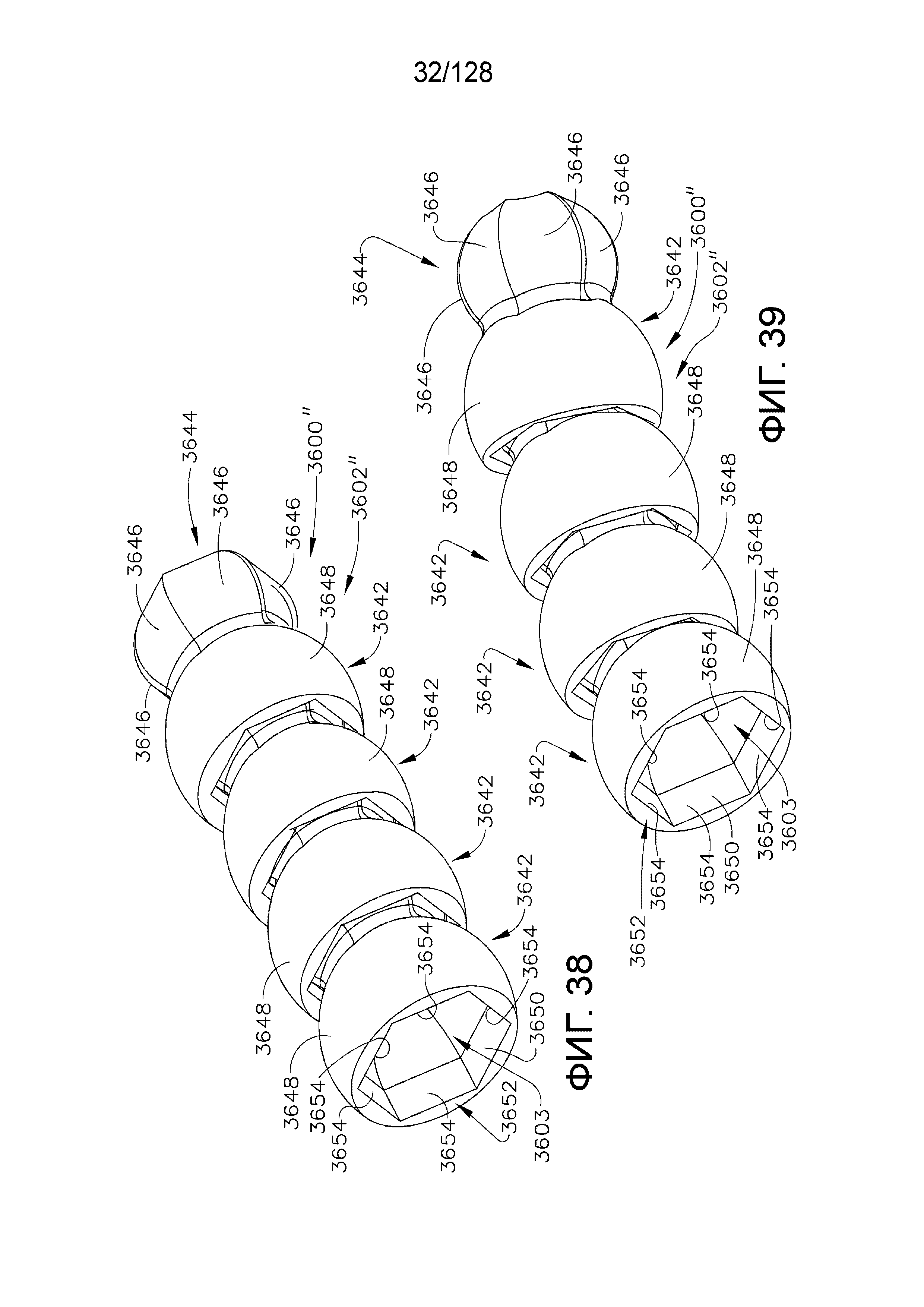
На ФИГ. 38 представлен вид в перспективе другого варианта осуществления узла приводного стержня.
На ФИГ. 39 представлен другой вид в перспективе варианта осуществления приводного узла стержня, показанного на ФИГ. 38, в дугообразной конфигурации.
На ФИГ. 40 представлен вид сверху варианта осуществления узла приводного стержня, показанного на ФИГ. 38 и39.
На ФИГ. 41 представлен вид в поперечном сечении варианта осуществления узла приводного стержня, показанного на ФИГ. 40.
На ФИГ. 42 представлен частичный вид в поперечном сечении другого варианта осуществления узла приводного стержня.
На ФИГ. 43 представлен другой вид в поперечном сечении варианта осуществления узла приводного стержня, показанного на ФИГ. 42.
На ФИГ. 44 представлен другой вид в поперечном сечении части другого варианта осуществления узла приводного стержня.
На ФИГ. 45 представлен другой вид в поперечном сечении одного варианта осуществления узла приводного стержня, показанного на ФИГ. 44.
На ФИГ. 46 представлен вид в перспективе другого варианта осуществления хирургического инструмента.
На ФИГ. 47 представлен вид в поперечном сечении в перспективе варианта хирургического инструмента, показанного на ФИГ. 46.
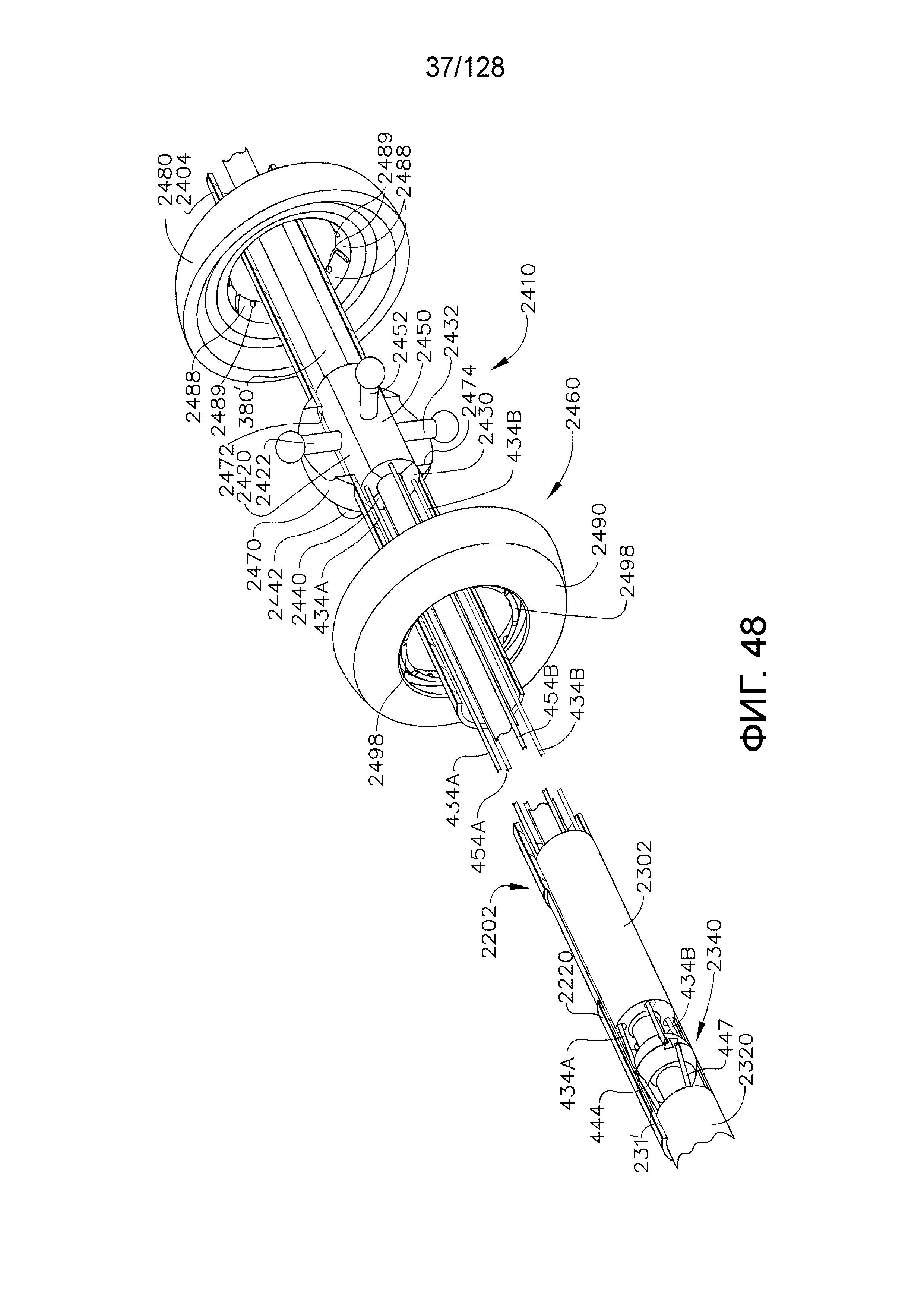
На ФИГ. 48 представлен вид в поперечном сечении в перспективе части одного варианта осуществления системы шарнира.
На ФИГ. 49 представлен вид в поперечном сечении одного варианта осуществления системы шарнира, показанной на ФИГ. 48, в нейтральном положении.
На ФИГ. 50 представлен другой вид в поперечном сечении одного варианта осуществления системы шарнира, показанной на ФИГ. 48 и 49, в шарнирно повернутом положении.
На ФИГ. 51 представлен вид сбоку в вертикальной проекции части одного варианта осуществления хирургического инструмента, показанного на ФИГ. 46-47, причем его части опущены для ясности.
На ФИГ. 52 представлен вид сзади в перспективе части одного варианта осуществления хирургического инструмента, показанного на ФИГ. 46-47, причем его части опущены для ясности.
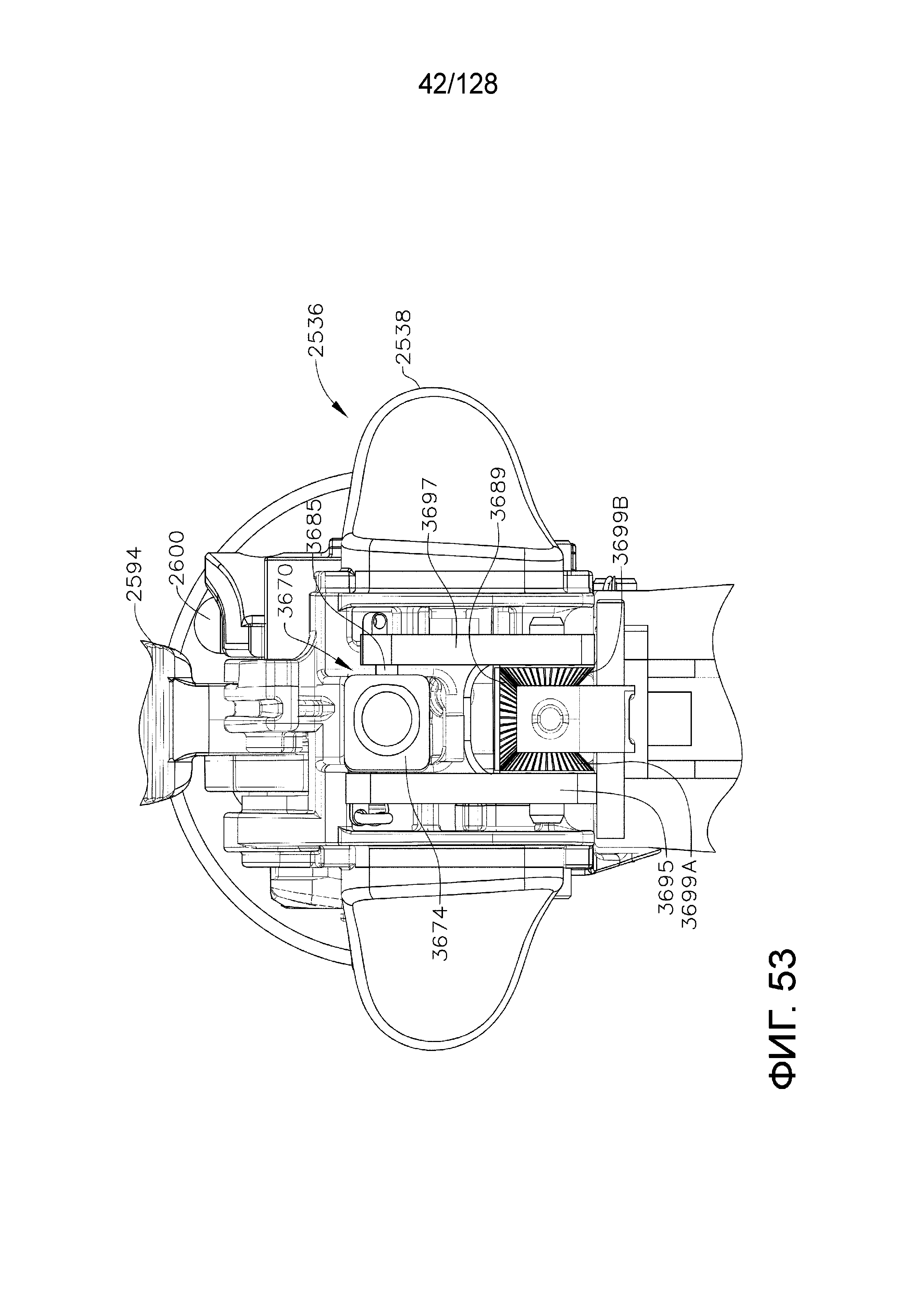
На ФИГ. 53 представлен вид сзади в вертикальной проекции части одного варианта осуществления хирургического инструмента, показанного на ФИГ. 46-47, причем его части опущены для ясности.
На ФИГ. 54 представлен вид спереди в перспективе части одного варианта осуществления хирургического инструмента, показанного на ФИГ. 46-47, причем его части опущены для ясности.
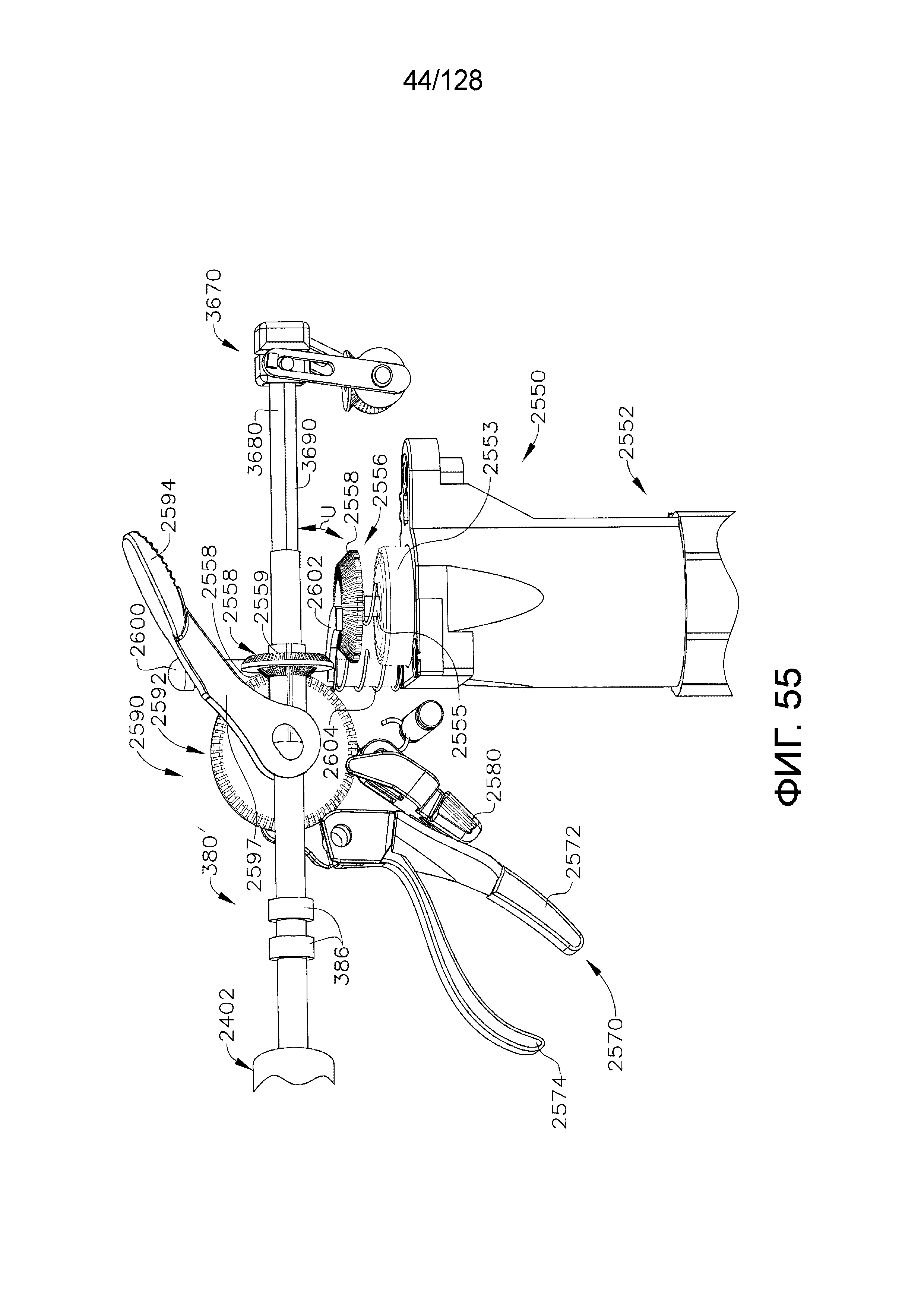
На ФИГ. 55 представлен вид сбоку в вертикальной проекции части варианта осуществления хирургического инструмента, показанного на ФИГ. 46-47, причем его части опущены для ясности.
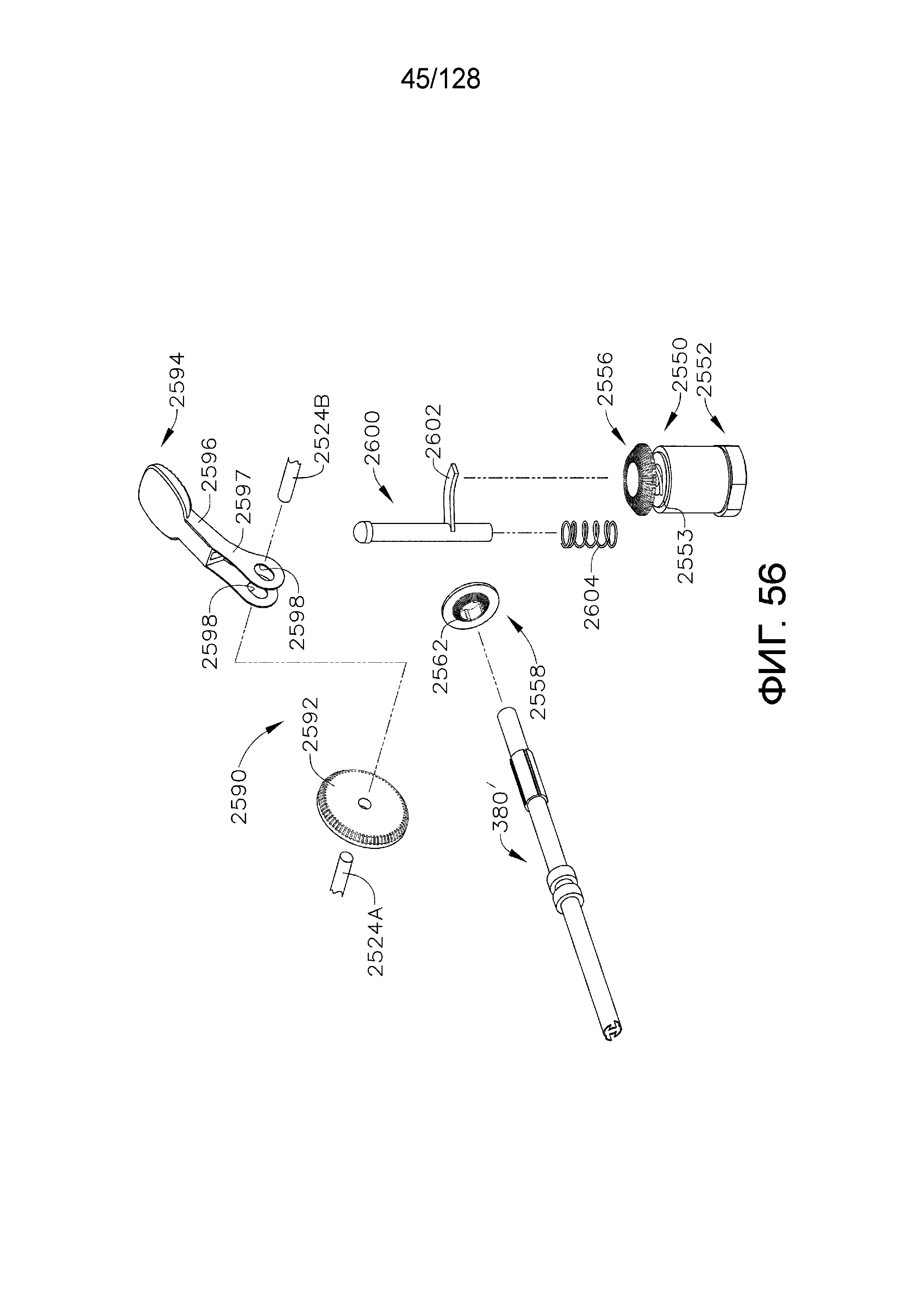
На ФИГ. 56 представлен общий вид с пространственным разделением компонентов примера осуществления реверсирующей системы хирургического инструмента, показанного на ФИГ. 46-47.
На ФИГ. 57 представлен вид в перспективе варианта осуществления плеча рычага реверсирующей системы, показанной на ФИГ. 56.
На ФИГ. 58 представлен вид в перспективе кнопки оттягивания скальпеля одного варианта осуществления реверсирующей системы, показанной на ФИГ. 56.
На ФИГ. 59 представлен вид в перспективе части варианта осуществления хирургического инструмента, показанного на ФИГ. 46-47, причем его части опущены для ясности, с плечом рычага, выполненным с возможностью активируемого зацепления с реверсирующей шестерней.
На ФИГ. 60 представлен вид в перспективе части варианта осуществления хирургического инструмента, показанного на ФИГ. 46-47, причем его части опущены для ясности, с плечом рычага, находящимся в неактивированном положении.
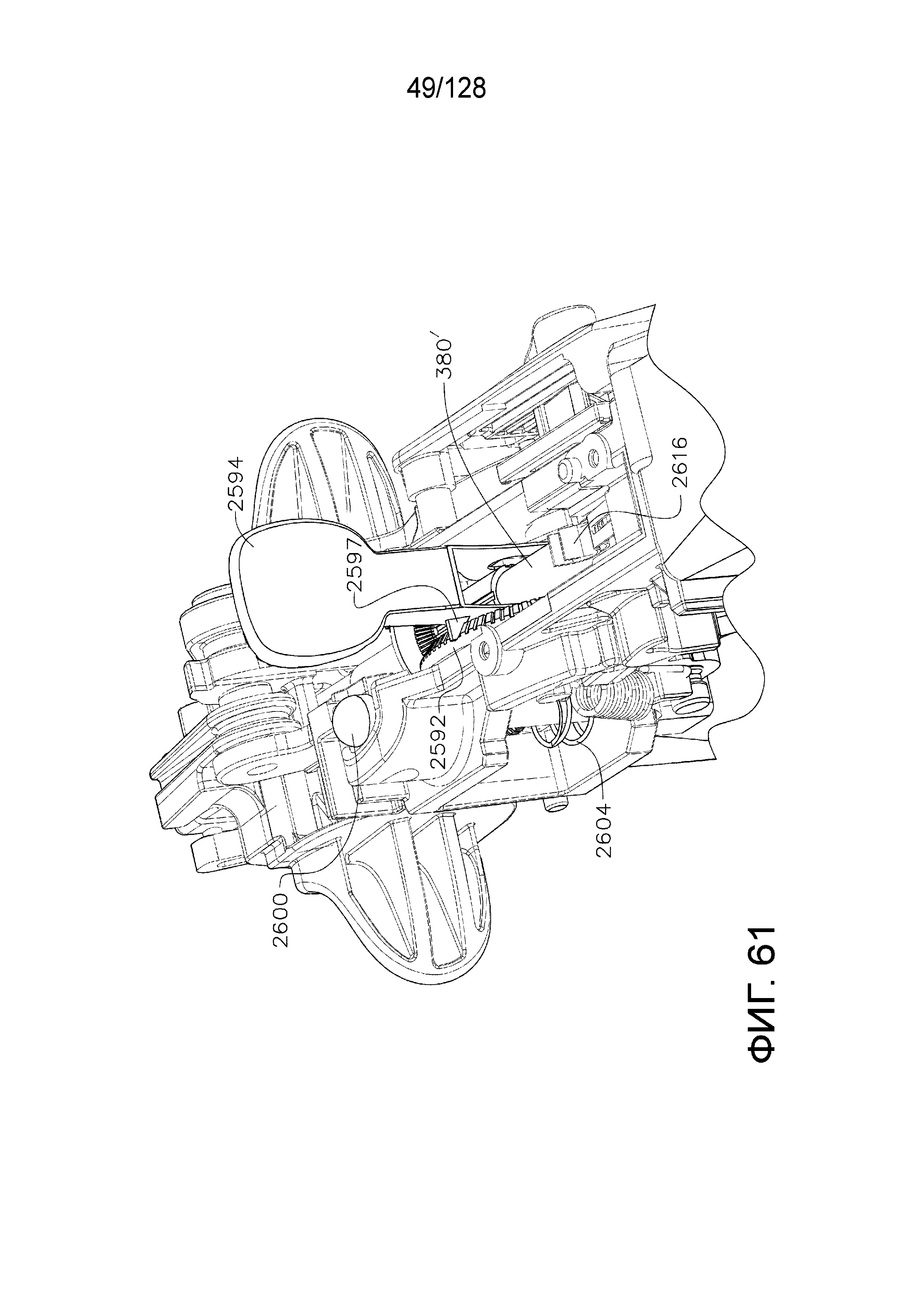
На ФИГ. 61 представлен другой вид в перспективе части варианта осуществления хирургического инструмента, показанного на ФИГ. 46-47, причем его части опущены для ясности, с плечом рычага, выполненным с возможностью активируемого зацепления с реверсирующей шестерней.
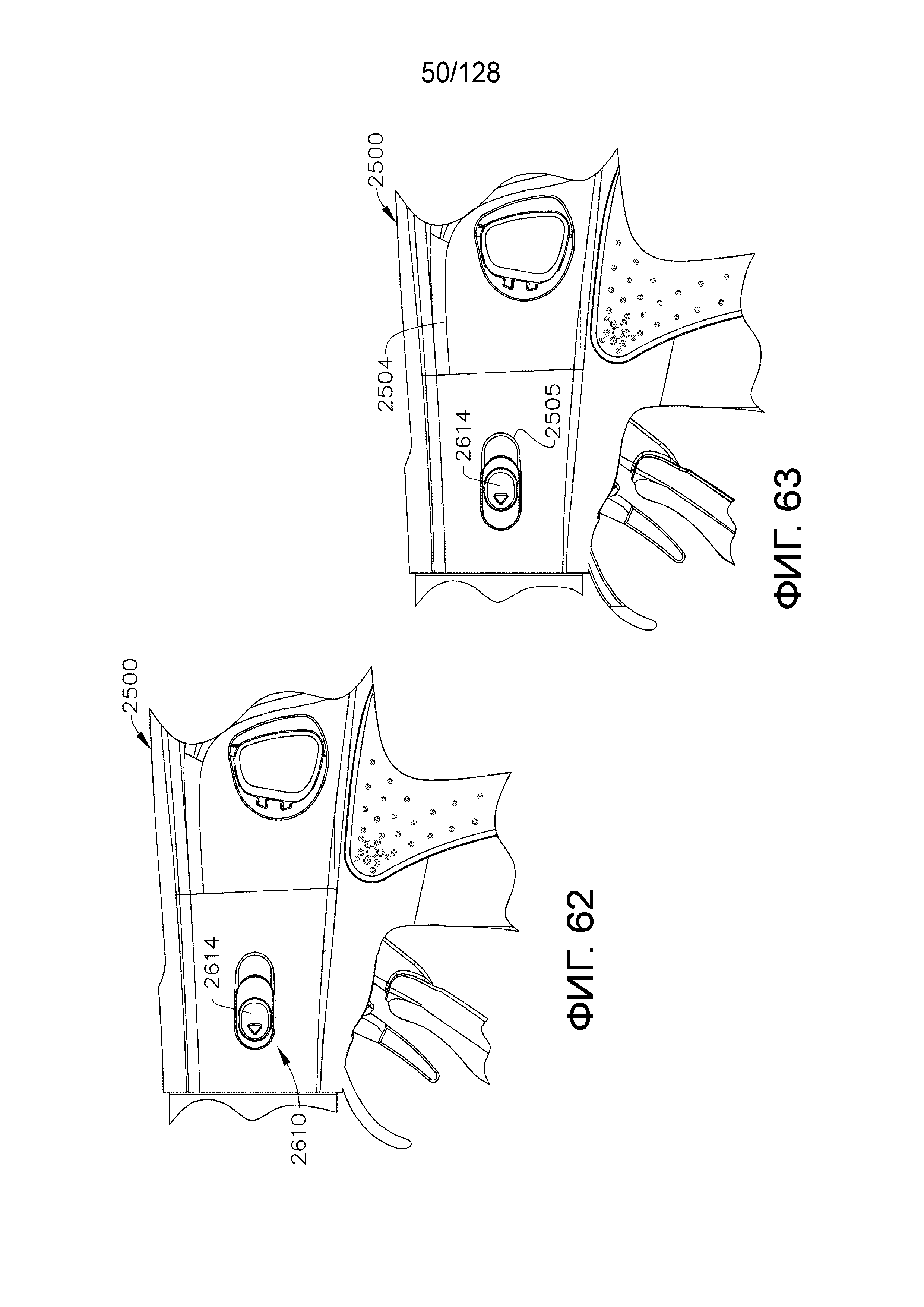
На ФИГ. 62 представлен вид сбоку в вертикальной проекции части узла рукоятки варианта осуществления хирургического инструмента, показанного на ФИГ. 46-47, с узлом кнопки переключения передачи, перемещенным в положение, приводящее к повороту концевого эффектора при активации узла приводного стержня.
На ФИГ. 63 представлен другой вид сбоку в вертикальной проекции части узла рукоятки одного варианта осуществления хирургического инструмента, показанного на ФИГ. 46-47, с узлом кнопки переключения передачи, перемещенным в другое положение, приводящее к активации пускового элемента в концевом эффекторе при активации узла приводного стержня.
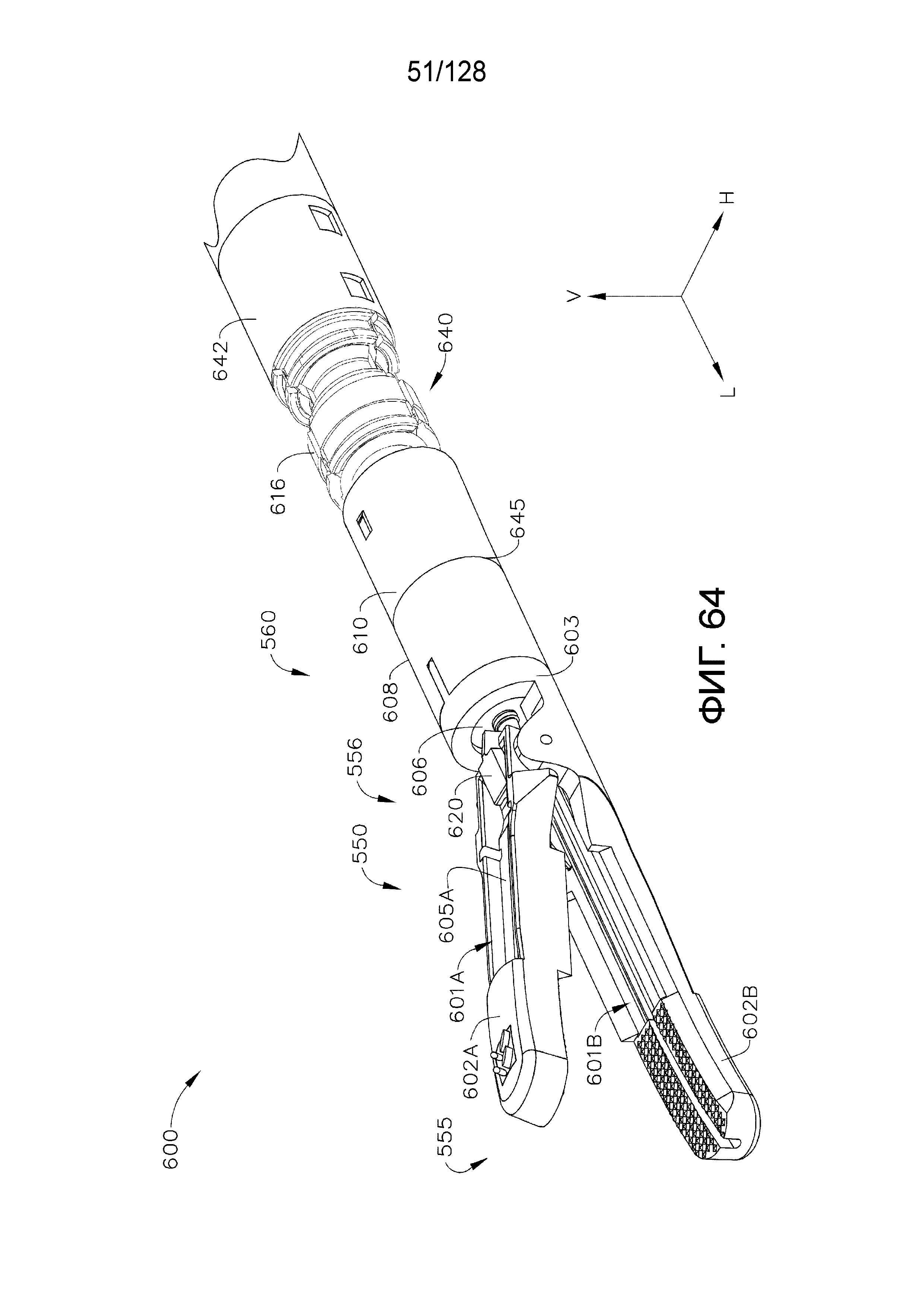
На ФИГ. 64 представлен вид в перспективе одного варианта осуществления многоосевого шарнирного и поворотного хирургического инструмента.
На ФИГ. 65 представлен вид в перспективе с пространственным разделением различных компонентов одного варианта осуществления хирургического инструмента, показанного на ФИГ. 64.
На ФИГ. 66 представлен частичный вид в поперечном сечении в перспективе одного варианта осуществления хирургического инструмента, показанного на ФИГ. 64, на котором показан поворотный приводной стержень, зацепленный с поворотной приводной гайкой для инициирования поступательного перемещения двутаврового элемента и закрытия узла браншей концевого эффектора.
На ФИГ. 67 представлен вид в поперечном сечении в перспективе одного варианта осуществления хирургического инструмента, показанного на ФИГ. 64, на котором показан поворотный приводной стержень, зацепленный с поворотной приводной гайкой для инициирования поступательного перемещения двутаврового элемента и закрытия узла браншей концевого эффектора.
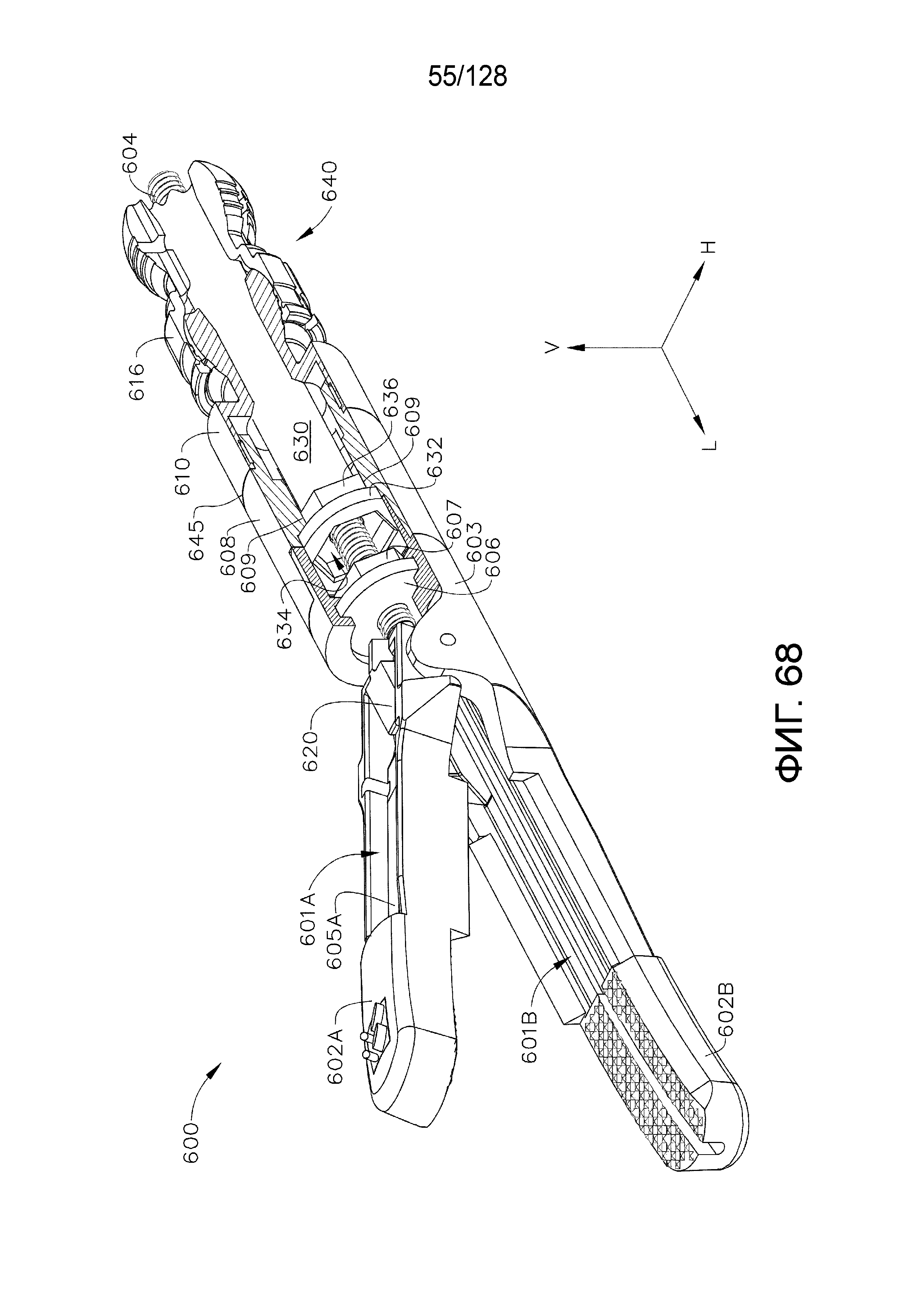
На ФИГ. 68 представлен частичный вид в поперечном сечении в перспективе одного варианта осуществления хирургического инструмента, показанного на ФИГ. 64, на котором показан поворотный приводной стержень, зацепленный с соединителем стержня для инициирования поворота концевого эффектора.
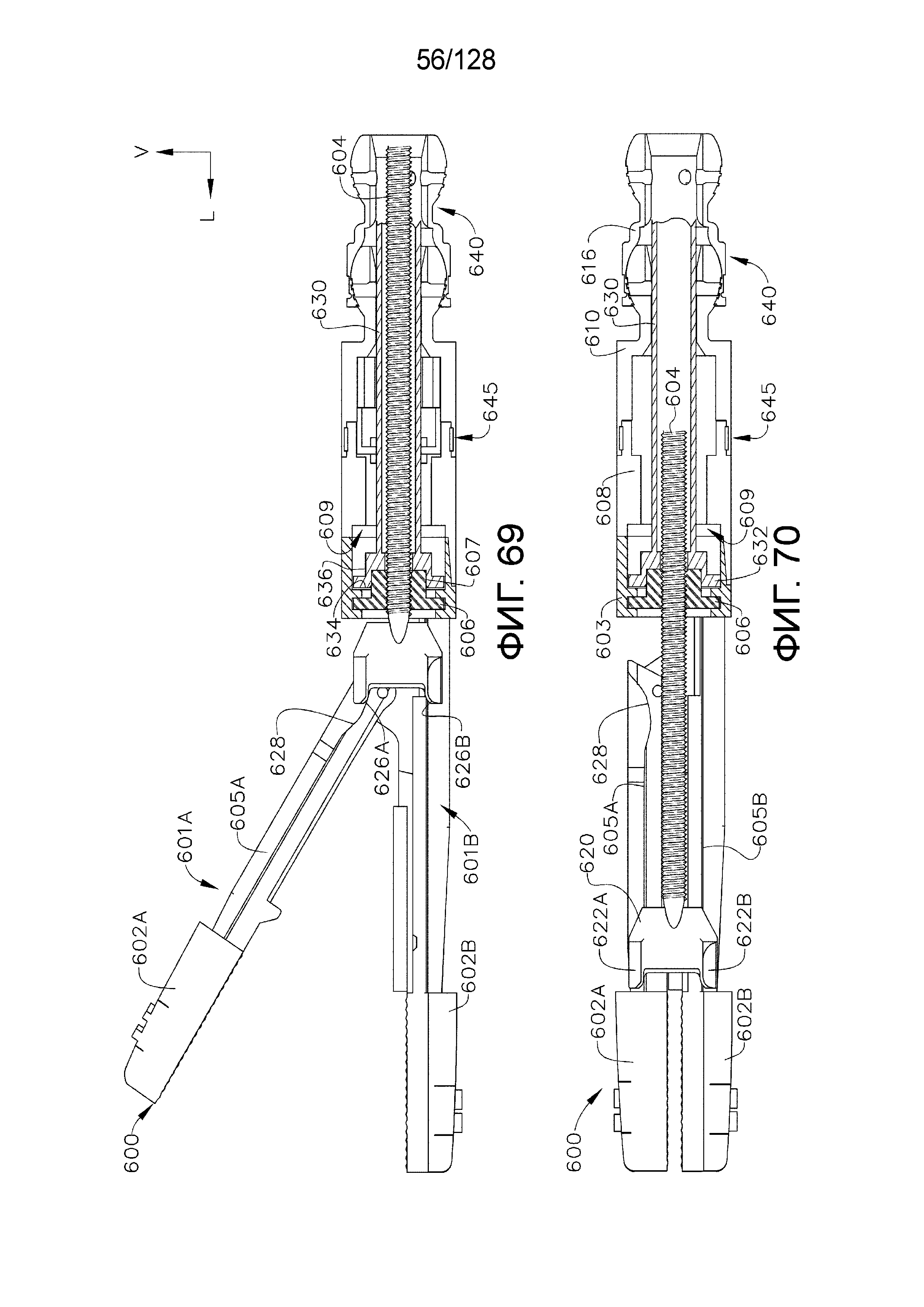
На ФИГ. 69 представлен вид сбоку в поперечном сечении одного варианта осуществления хирургического инструмента, показанного на ФИГ. 64, на котором показан узел браншей концевого эффектора в открытом положении, с двутавровым элементом, находящимся в проксимально оттянутом положении, и поворотным приводным стержнем в зацеплении с поворотной приводной гайкой для инициирования поступательного перемещения двутаврового элемента и закрытия узла браншей концевого эффектора.
На ФИГ. 70 представлен вид сбоку в поперечном сечении одного варианта осуществления хирургического инструмента, показанного на ФИГ. 64, на котором показан узел браншей концевого эффектора в закрытом положении, с двутавровым элементом, находящимся в дистально продвинутом положении, и поворотным приводным стержнем в зацеплении с поворотной приводной гайкой для инициирования поступательного перемещения двутаврового элемента и открытия узла браншей концевого эффектора.
На ФИГ. 71 представлен вид сбоку в поперечном сечении одного варианта осуществления хирургического инструмента, показанного на ФИГ. 64, на котором показан узел браншей концевого эффектора в открытом положении, с двутавровым элементом, находящимся проксимально оттянутом положении, и поворотным приводным стержнем в зацеплении с соединителем стержня для инициирования поворота концевого эффектора.
На ФИГ. 72 представлен вид сбоку в поперечном сечении одного варианта осуществления хирургического инструмента, показанного на ФИГ. 64, на котором показан узел браншей концевого эффектора в закрытом положении, с двутавровым элементом, находящимся в дистально продвинутом положении, и поворотным приводным стержнем в зацеплении с соединителем стержня для инициирования поворота концевого эффектора.
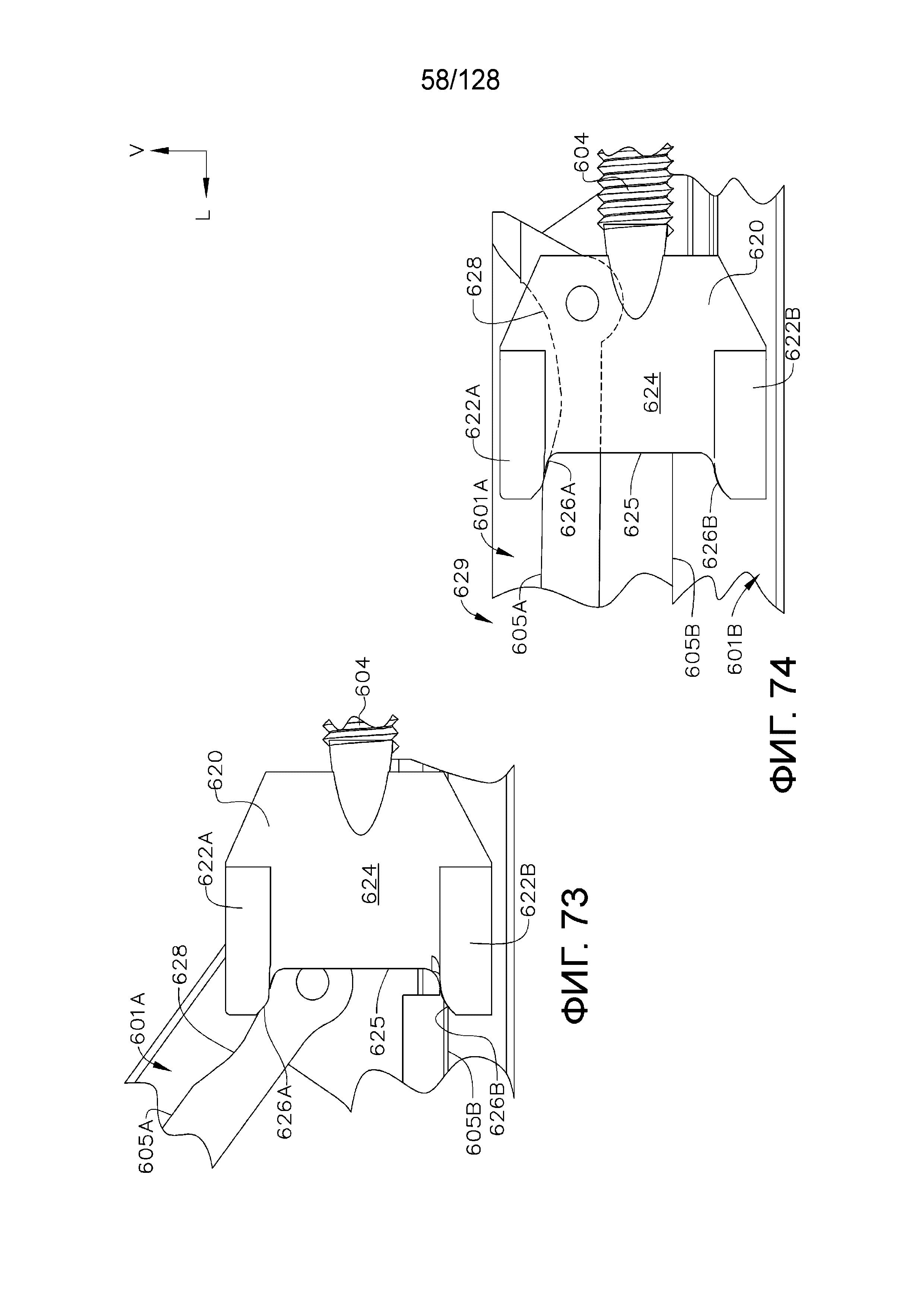
На ФИГ. 73 и 74 представлены подробные виды сбоку в поперечном сечении одного варианта осуществления хирургического инструмента, показанного на ФИГ. 64, на которых показано зацепление криволинейных поверхностей двутаврового элемента с поверхностями упора первого элемента бранши для перемещения первого элемента бранши относительно второго элемента бранши между открытым положением и закрытым положением.
На ФИГ. 75 представлен вид с пространственным разделением компонентов, содержащий вариант осуществления многоосевого шарнирного и поворотного хирургического инструмента, содержащего механизм блокировки головки.
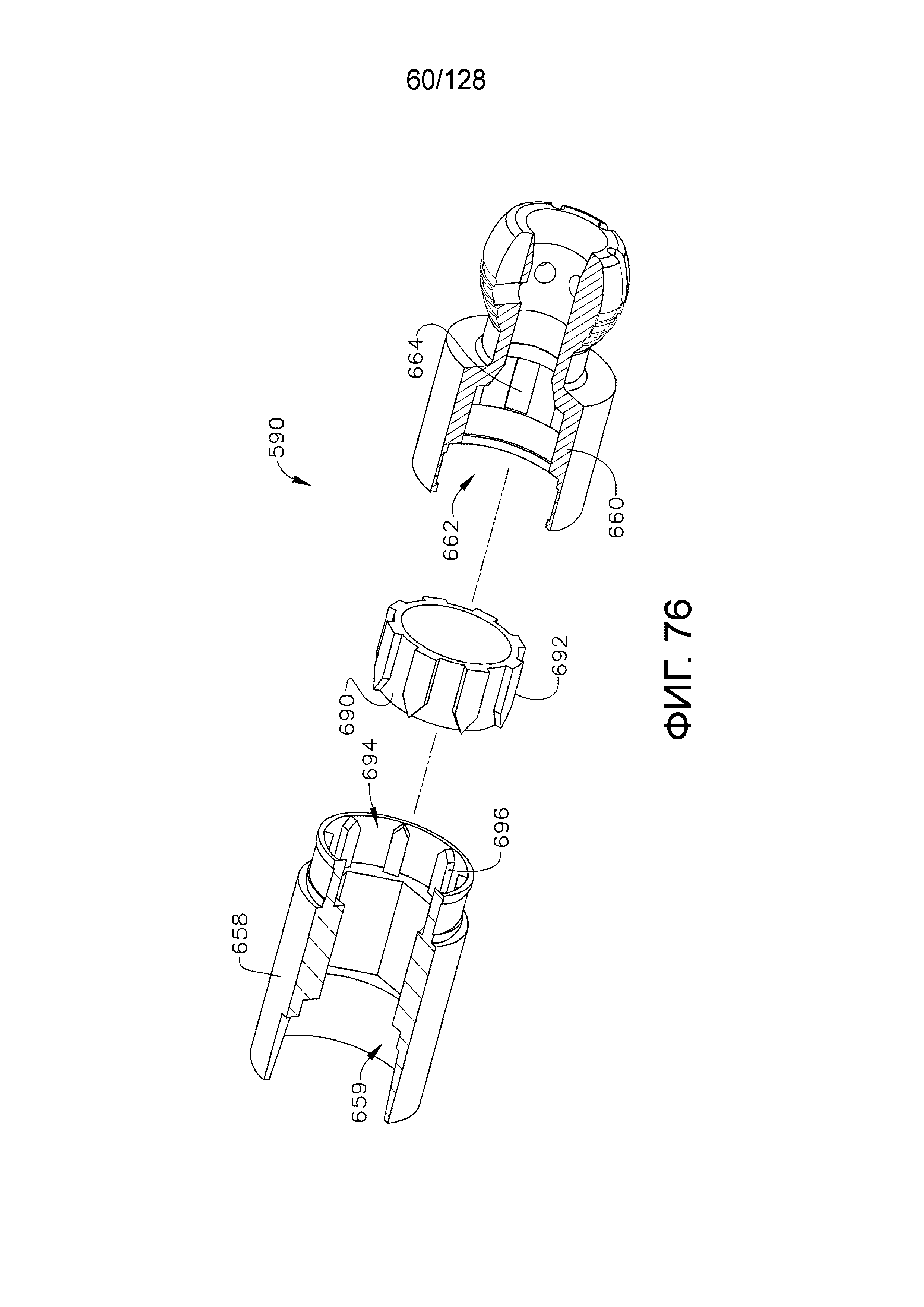
На ФИГ. 76 представлен вид с пространственным разделением компонентов шлицевого замка одного варианта осуществления механизма блокировки головки хирургического инструмента, показанного на ФИГ. 75.
На ФИГ. 77 представлен вид сбоку в поперечном сечении одного варианта осуществления хирургического инструмента, показанного на ФИГ. 75, на котором показан узел браншей концевого эффектора в открытом положении с двутавровым элементом, находящимся в проксимально оттянутом положении, и поворотным приводным стержнем в зацеплении с поворотной приводной гайкой для инициирования поступательного перемещения двутаврового элемента и закрытия узла браншей концевого эффектора, а также с зацепленным шлицевым замком, предотвращающим поворот концевого эффектора.
На ФИГ. 78 представлен вид сбоку в поперечном сечении одного варианта осуществления хирургического инструмента, показанного на ФИГ. 75, на котором показан узел браншей концевого эффектора в закрытом положении с двутавровым элементом, находящимся в дистально продвинутом положении, и поворотным приводным стержнем в зацеплении с поворотной приводной гайкой для инициирования поступательного перемещения двутаврового элемента и открытия узла браншей концевого эффектора, а также с зацепленным шлицевым замком, предотвращающим поворот концевого эффектора.
На ФИГ. 79 представлен вид сбоку в поперечном сечении одного варианта осуществления хирургического инструмента, показанного на ФИГ. 75, на котором показан узел браншей концевого эффектора в открытом положении, с двутавровым элементом, находящимся в проксимально оттянутом положении, и поворотным приводным стержнем в зацеплении с соединителем стержня для инициирования поворота концевого эффектора, а также расцепленным шлицевым замком, позволяющим поворот концевого эффектора.
На ФИГ. 80 представлен вид сбоку в поперечном сечении одного варианта осуществления хирургического инструмента, показанного на ФИГ. 64, на котором показан узел браншей концевого эффектора в закрытом положении, с двутавровым элементом, находящимся в дистально продвинутом положении, и поворотным приводным стержнем в зацеплении с соединителем стержня для инициирования поворота концевого эффектора, а также расцепленным шлицевым замком, позволяющим поворот концевого эффектора.
На ФИГ. 81 представлен подробный вид сбоку в поперечном сечении одного варианта осуществления хирургического инструмента, показанного на ФИГ. 80.
На ФИГ. 82 представлен подробный вид сбоку в поперечном сечении одного варианта осуществления хирургического инструмента, показанного на ФИГ. 78.
На ФИГ. 83 представлен вид в поперечном сечении в перспективе хирургического инструмента, имеющего первый и второй элементы бранши, в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 84 представлен вид в перспективе закрывающей гайки одного варианта осуществления хирургического инструмента, показанного на ФИГ. 83.
На ФИГ. 85 представлен вид в поперечном сечении в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ. 83, причем первый элемент бранши и второй элемент бранши находятся по меньшей мере в частично открытом положении, и причем поворотный приводной стержень функционально расцеплен с поворотной приводной гайкой.
На ФИГ. 86 представлен вид в поперечном сечении в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ. 83, причем первый элемент бранши и второй элемент бранши находятся по меньшей мере в частично открытом положении и причем поворотный приводной стержень функционально зацеплен с поворотной приводной гайкой.
На ФИГ. 87 представлен вид в поперечном сечении в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ. 83, причем первый элемент бранши и второй элемент бранши находятся по меньшей мере в частично закрытом положении, и причем поворотный приводной стержень функционально зацеплен с поворотной приводной гайкой, и причем закрывающая гайка функционально расцеплена с поворотной приводной гайкой.
На ФИГ. 88 представлен вид в поперечном сечении в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ. 83, причем первый элемент бранши и второй элемент бранши находятся по меньшей мере в частично закрытом положении, и причем поворотный приводной стержень функционально зацеплен с поворотной приводной гайкой, и причем двутавровый элемент по меньшей мере частично выдвинут.
На ФИГ. 89 представлен вид в поперечном сечении в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ. 83, причем первый элемент бранши и второй элемент бранши находятся по меньшей мере в частично закрытом положении, и причем поворотный приводной стержень функционально зацеплен с поворотной приводной гайкой, и причем двутавровый элемент по меньшей мере частично оттянут.
На ФИГ. 90 представлен вид в поперечном сечении в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ. 83, причем первый элемент бранши и второй элемент бранши находятся по меньшей мере в частично закрытом положении, и причем поворотный приводной стержень функционально зацеплен с поворотной приводной гайкой, и причем двутавровый элемент по меньшей мере частично оттянут.
На ФИГ. 91 представлен вид в поперечном сечении в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ. 83, причем первый элемент бранши и второй элемент бранши находятся по меньшей мере в частично открытом положении, и причем поворотный приводной стержень функционально зацеплен с поворотной приводной гайкой, и причем закрывающая гайка функционально зацеплена с поворотной приводной гайкой.
На ФИГ. 92 представлен вид в поперечном сечении в перспективе хирургического инструмента, имеющего первый и второй элементы бранши, в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 93 представлен вид в поперечном сечении в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ. 92, причем первый элемент бранши и второй элемент бранши находятся по меньшей мере в частично открытом положении, и причем поворотный приводной стержень функционально зацеплен со шлицевой соединительной частью корпуса привода концевого эффектора.
На ФИГ. 94 представлен вид в поперечном сечении в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ. 92, причем первый элемент бранши и второй элемент бранши находятся по меньшей мере в частично закрытом положении, и причем поворотный приводной стержень функционально зацеплен со шлицевой соединительной частью цилиндрического кулачка.
На ФИГ. 95 представлен вид в поперечном сечении в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ.92, причем первый элемент бранши и второй элемент бранши находятся по меньшей мере в частично закрытом положении, и причем поворотный приводной стержень функционально не зацеплен с какими либо шлицевыми соединительными частями.
На ФИГ. 96 представлен вид в поперечном сечении в вертикальной проекции одного варианта осуществления хирургического инструмента, показанного на ФИГ. 92, причем первый элемент бранши и второй элемент бранши находятся по меньшей мере в частично закрытом положении, и причем поворотный приводной стержень функционально зацеплен со шлицевой соединительной частью поворотной приводной гайки.
На ФИГ. 97 представлен вид в перспективе концевого эффектора и шарнирного сочленения хирургического инструмента в соответствии по меньшей мере с одним вариантом осуществления, на котором части удалены для целей иллюстрации.
На ФИГ. 98 представлен подробный вид приводного стержня в соответствии по меньшей мере с одним вариантом осуществления, выполненного с возможностью поступательного перемещения внутри концевого эффектора и шарнирного сочленения, показанного на ФИГ. 97.
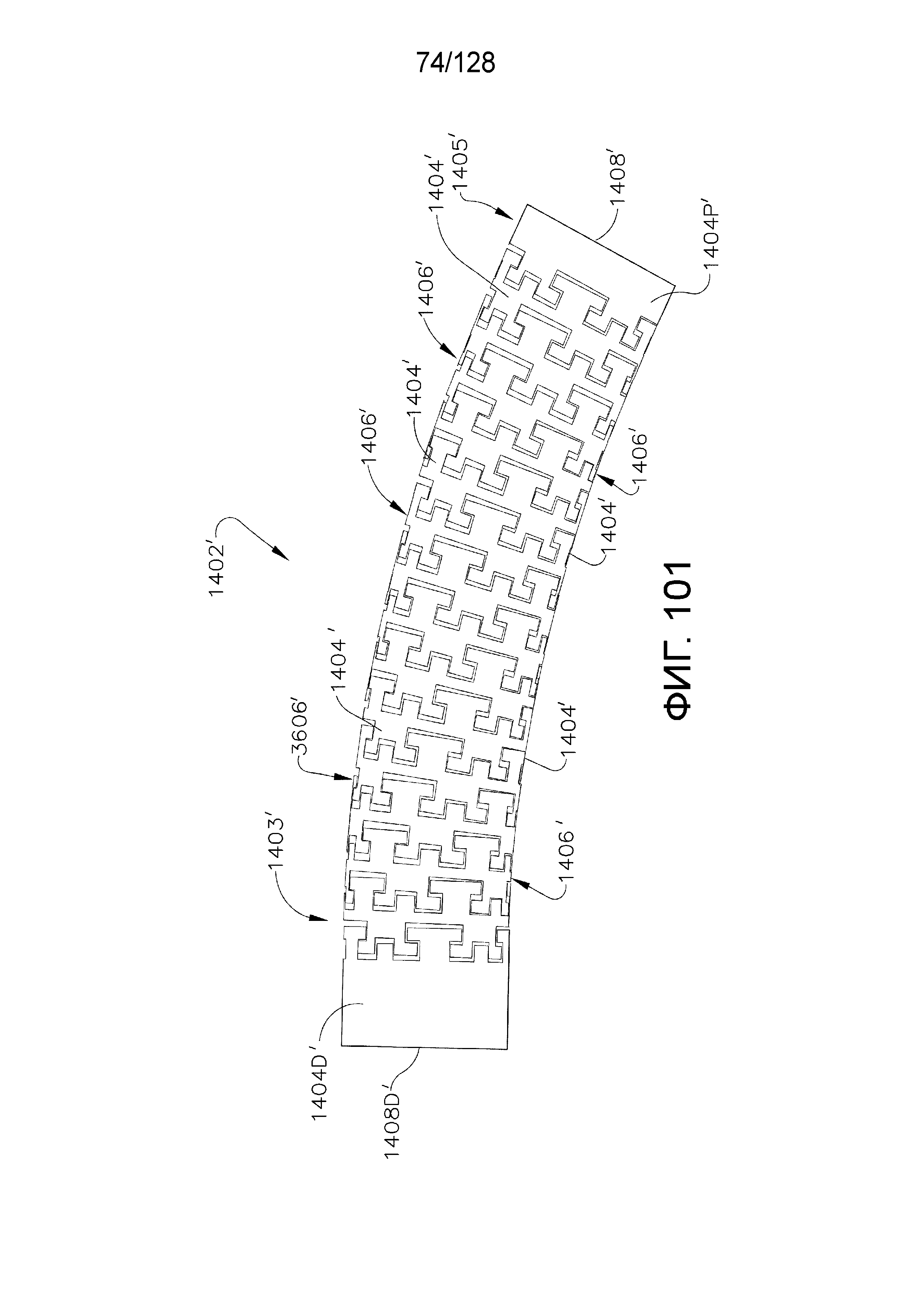
На ФИГ. 99 представлен вид в перспективе приводного стержня в соответствии по меньшей мере с одним альтернативным вариантом осуществления.
На ФИГ. 100 представлен вид в вертикальной проекции одного варианта осуществления приводного стержня, показанного на ФИГ. 99.
На ФИГ. 101 представлен вид в вертикальной проекции одного варианта осуществления приводного стержня, показанного на ФИГ. 99, показанного в шарнирно повернутом положении.
На ФИГ. 102 представлен вид в перспективе узла приводного стержня, содержащего приводную трубку и резьбу, направленную вокруг приводной трубки, в соответствии по меньшей мере с одним альтернативным вариантом осуществления.
На ФИГ. 103 представлен вид в вертикальной проекции одного варианта осуществления узла приводного стержня, показанного на ФИГ. 102.
На ФИГ. 104 представлен вид в перспективе узла приводного стержня, содержащего приводную трубку, резьбу, направленную вокруг приводной трубки, и внутренний сердечник, направленный через приводную трубку, в соответствии по меньшей мере с одним альтернативным вариантом осуществления.
На ФИГ. 105 представлен вид в вертикальной проекции одного варианта осуществления узла приводного стержня, показанного на ФИГ. 104.
На ФИГ. 106 представлен вид в перспективе хирургического инструмента, имеющего первый и второй элементы бранши, в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 107 представлен вид в разрезе дистальных частей одного варианта осуществления первого и второго элементов бранши хирургического концевого инструмента, показанного на ФИГ. 106.
На ФИГ. 108 представлен вид в перспективе хирургического концевого эффектора и узла стержня в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 109 представлен вид в перспективе элемента бранши хирургического концевого эффектора в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 110 представлен вид в поперечном сечении хирургического эффектора, отсоединенного от узла стержня, в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
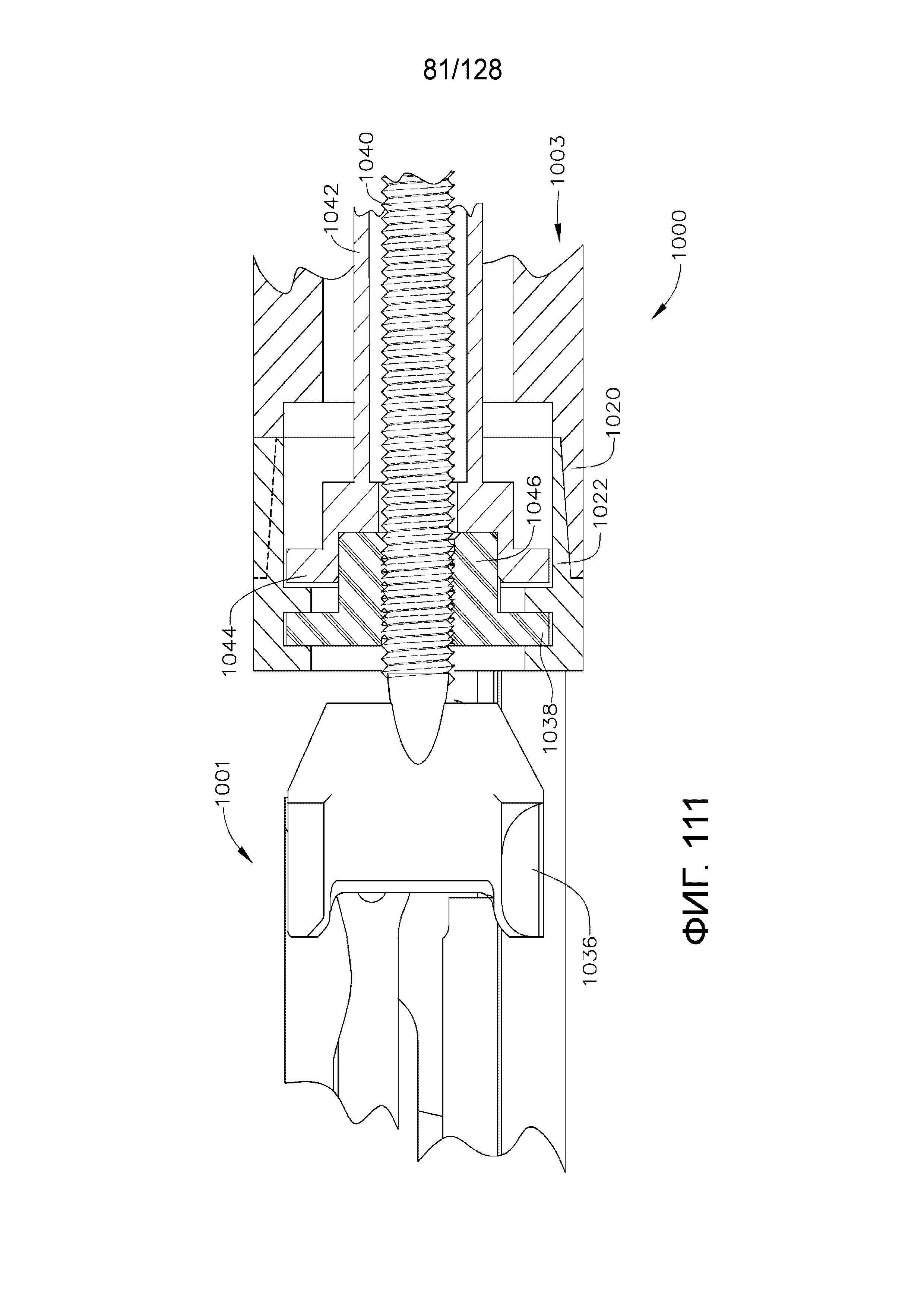
На ФИГ. 111 представлен вид в поперечном сечении хирургического эффектора, прикрепленного к узлу стержня, в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
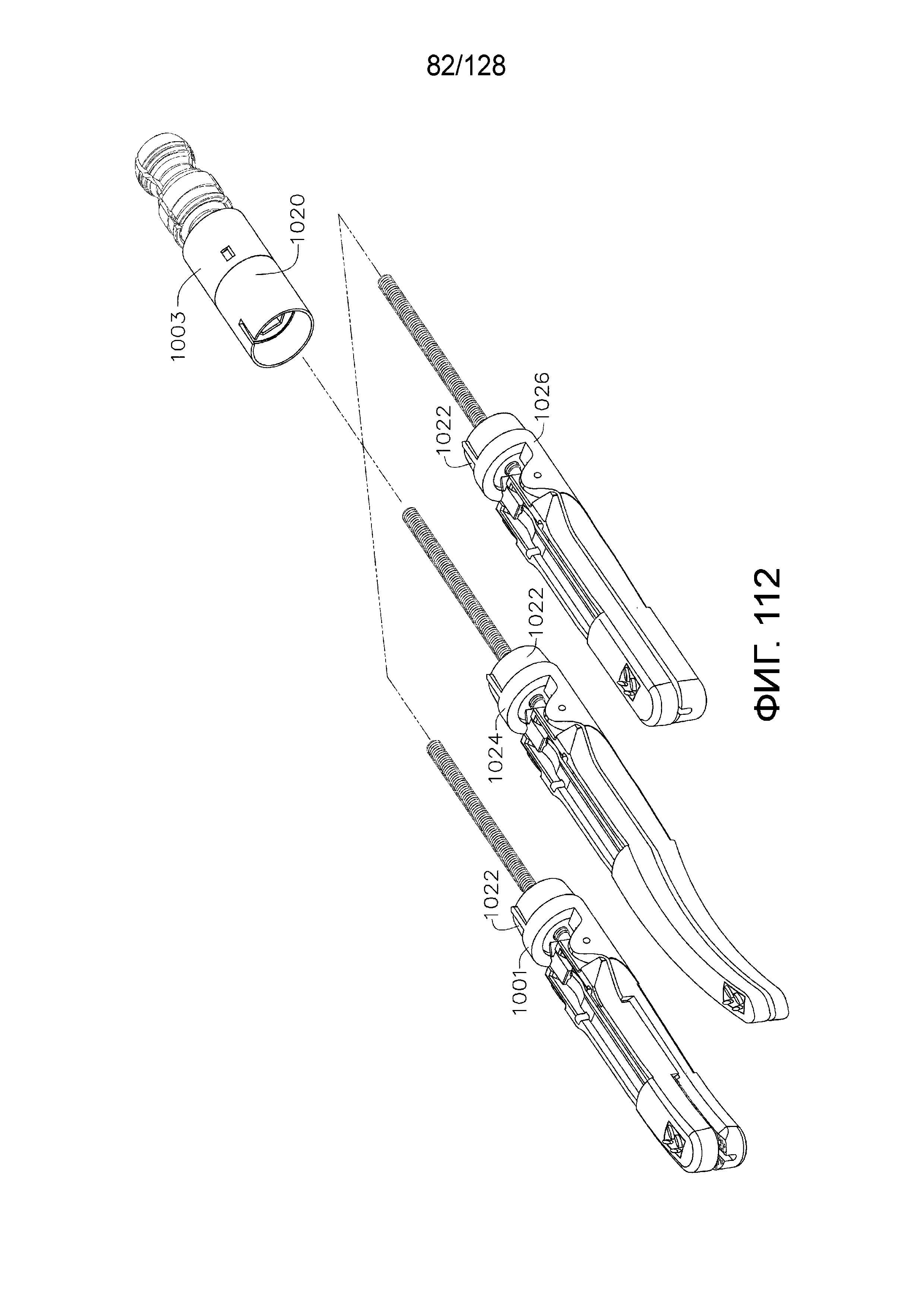
На ФИГ. 112 представлен вид в перспективе множества взаимозаменяемых хирургических концевых эффекторов в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 113 представлен вид в перспективе хирургического концевого эффектора, включая вид в поперечном сечении элемента бранши, в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 114 представлен вид в поперечном сечении хирургического эффектора, отсоединенного от узла стержня, в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 115 представлен вид в поперечном сечении хирургического эффектора, прикрепленного к узлу стержня, в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 116 представлен вид в перспективе хирургического концевого эффектора, имеющего первый элемент бранши и второй элемент бранши, в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 117 представлен другой вид в перспективе хирургического концевого эффектора, показанного на ФИГ. 116, включая вид в поперечном сечении в перспективе элемента бранши, в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 118 представлен вид в поперечном сечении первого элемента бранши и второго элемента бранши хирургического концевого эффектора в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 119 представлен вид в поперечном сечении первого элемента бранши и второго элемента бранши хирургического концевого эффектора в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 120 представлен вид в перспективе первого элемента бранши и второго элемента бранши хирургического концевого эффектора в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
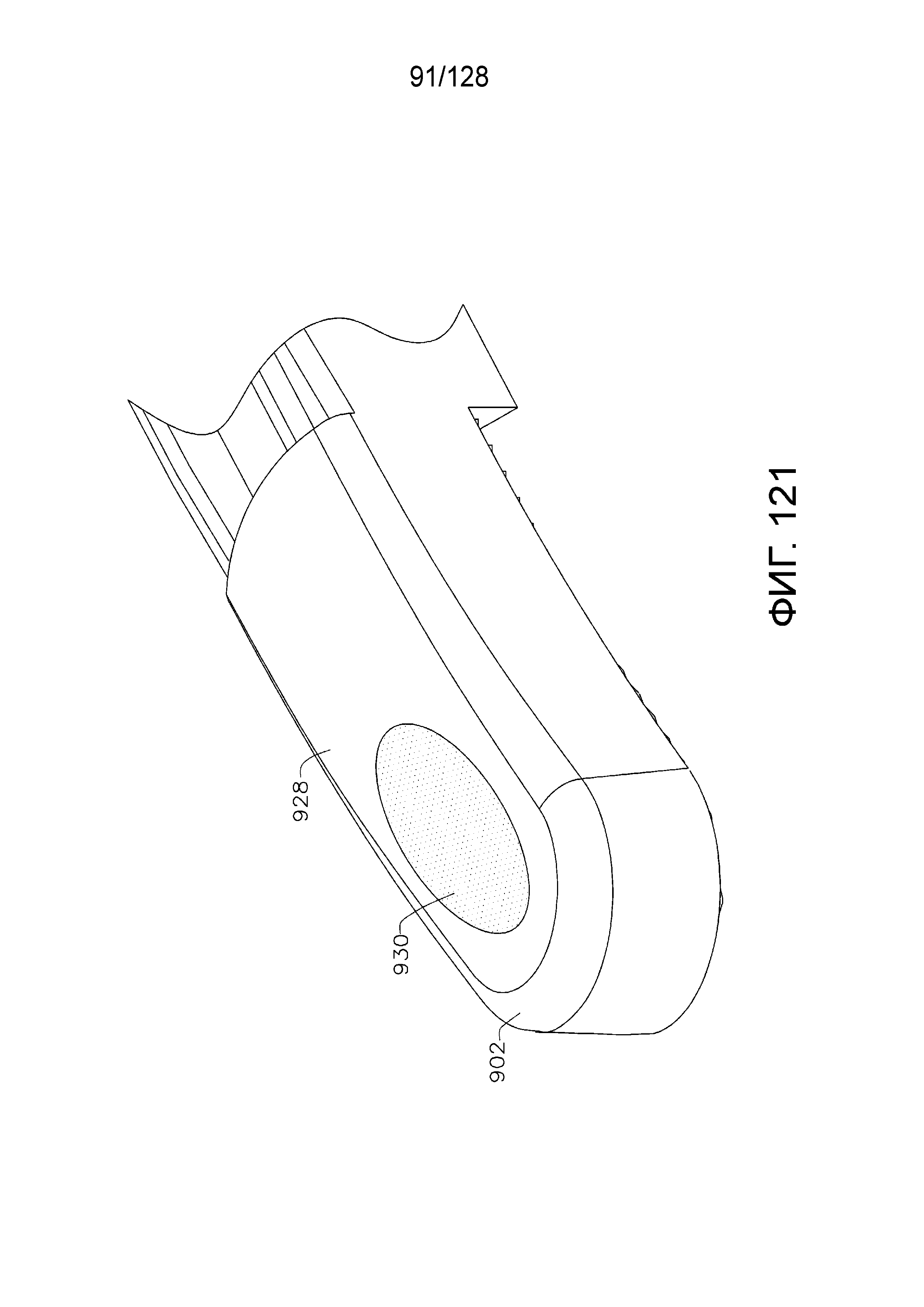
На ФИГ.121 представлен вид в перспективе дистальной части элемента бранши хирургического концевого эффектора в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 122 представлен вид сверху захватной части в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 123 представлен вид сверху захватной части в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 124 представлен вид сверху захватной части в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 125 представлен вид сверху захватной части в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 126 представлен вид сверху захватной части в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 127 представлен вид сверху захватной части в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 128 представлен вид сверху захватной части в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
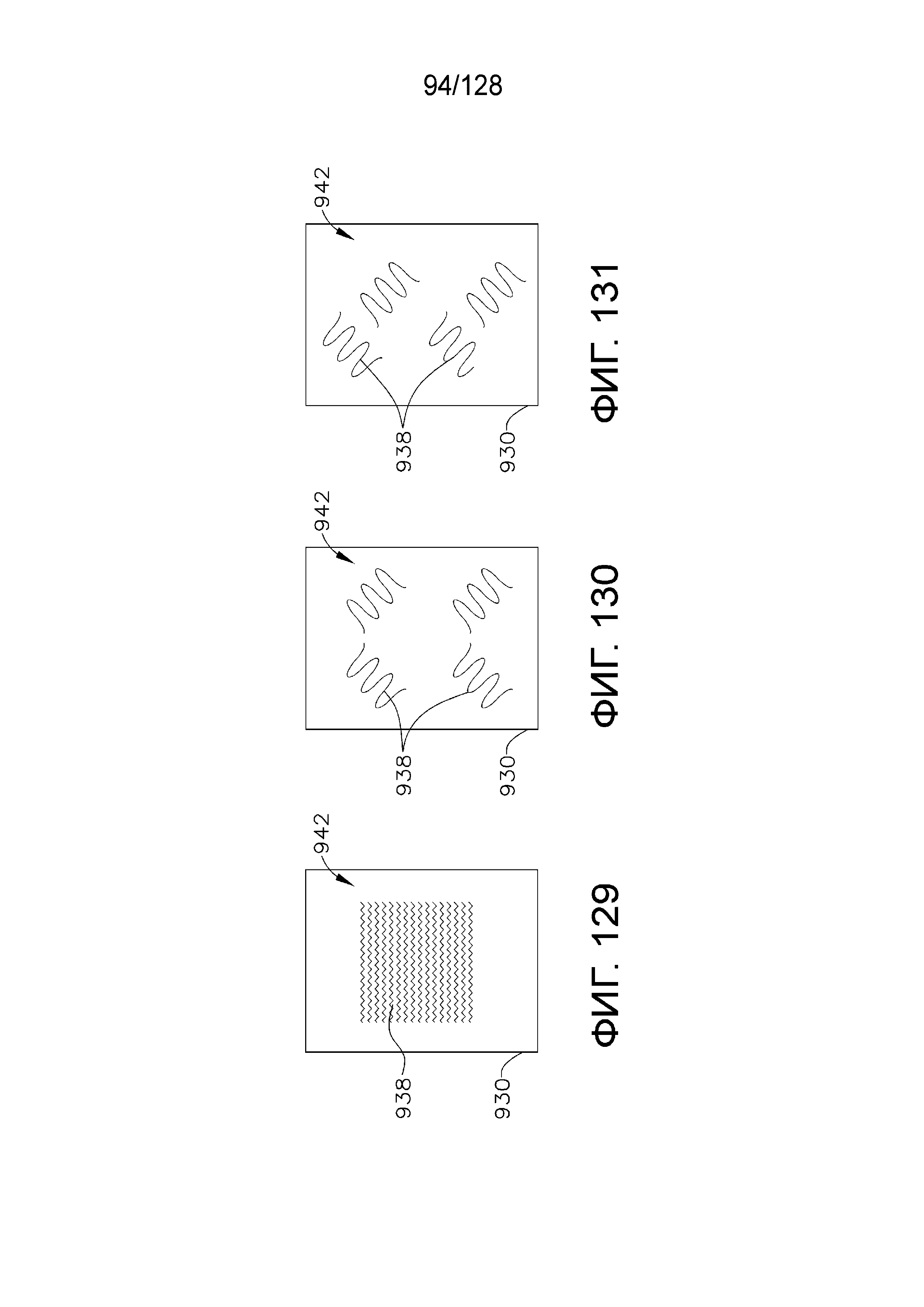
На ФИГ. 129 представлен вид сверху захватной части в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 130 представлен вид сверху захватной части в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 131 представлен вид сверху захватной части в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
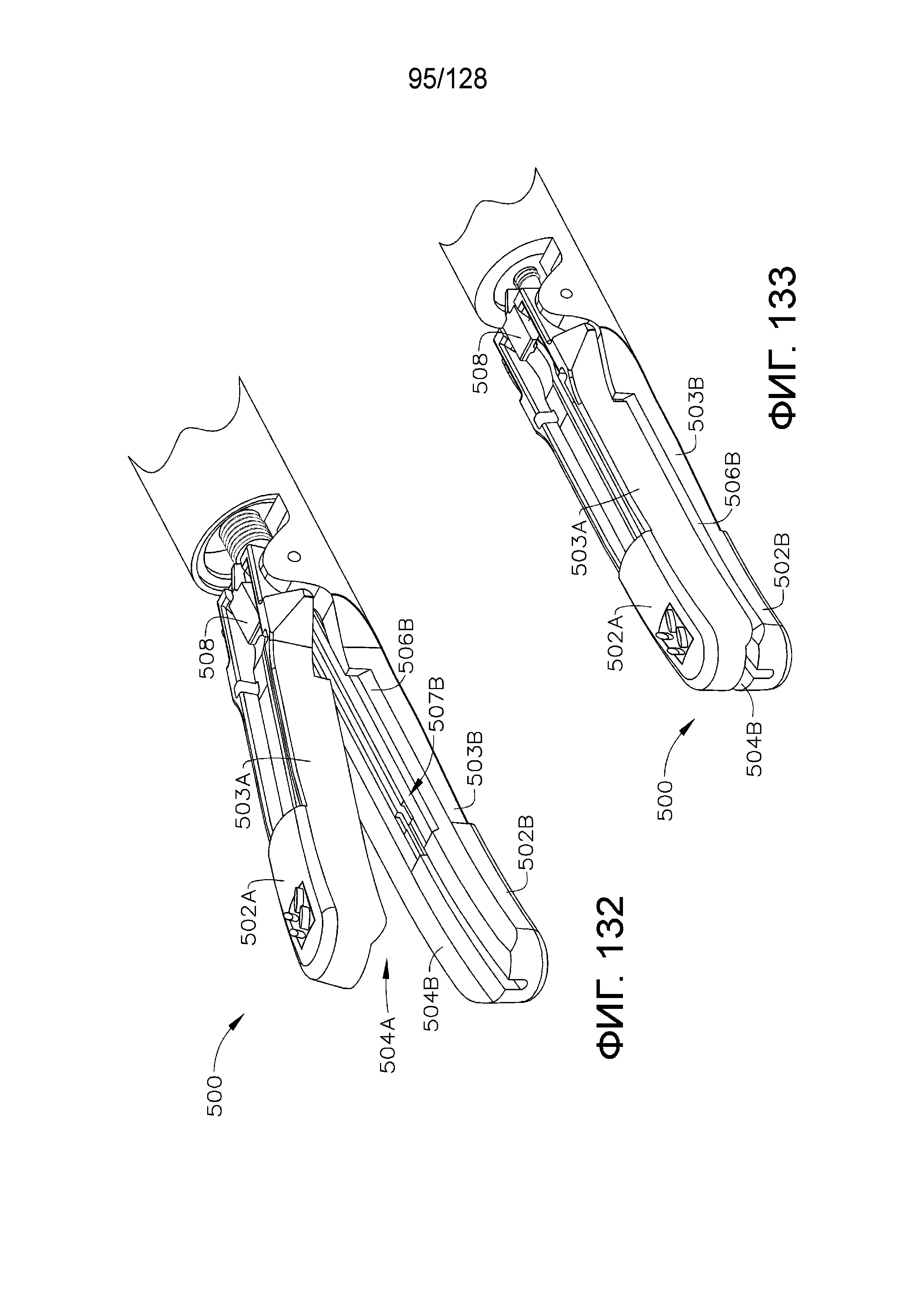
На ФИГ. 132 представлен вид в перспективе одного варианта осуществления концевого эффектора, имеющего первый и второй элементы бранши в открытом положении и наклоненные контактирующие с тканью поверхности, проходящие по существу по всей длине элементов бранши.
На ФИГ. 133 представлен другой вид в перспективе одного варианта осуществления концевого эффектора, показанного на ФИГ. 132, причем первый и второй элементы бранши находятся в закрытом положении.
На ФИГ. 134 представлен вид спереди одного варианта осуществления концевого эффектора, показанного на ФИГ. 133.
На ФИГ. 135 представлен вид в поперечном сечении одного варианта осуществления концевого эффектора, показанного на ФИГ. 134.
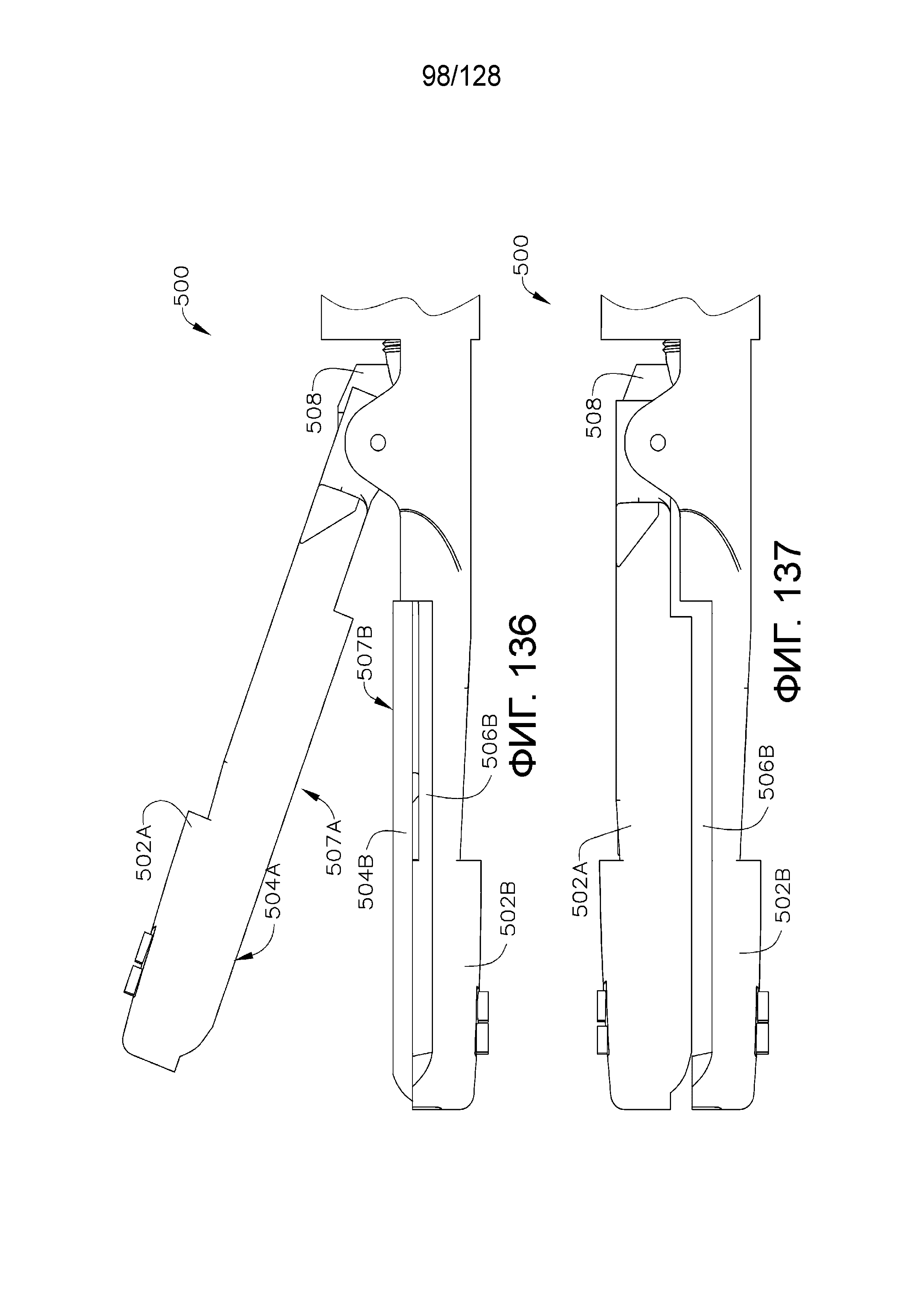
На ФИГ. 136 представлен вид сбоку одного варианта осуществления концевого эффектора, показанного на ФИГ. 132.
На ФИГ. 137 представлен вид сбоку одного варианта осуществления концевого эффектора, показанного на ФИГ. 133.
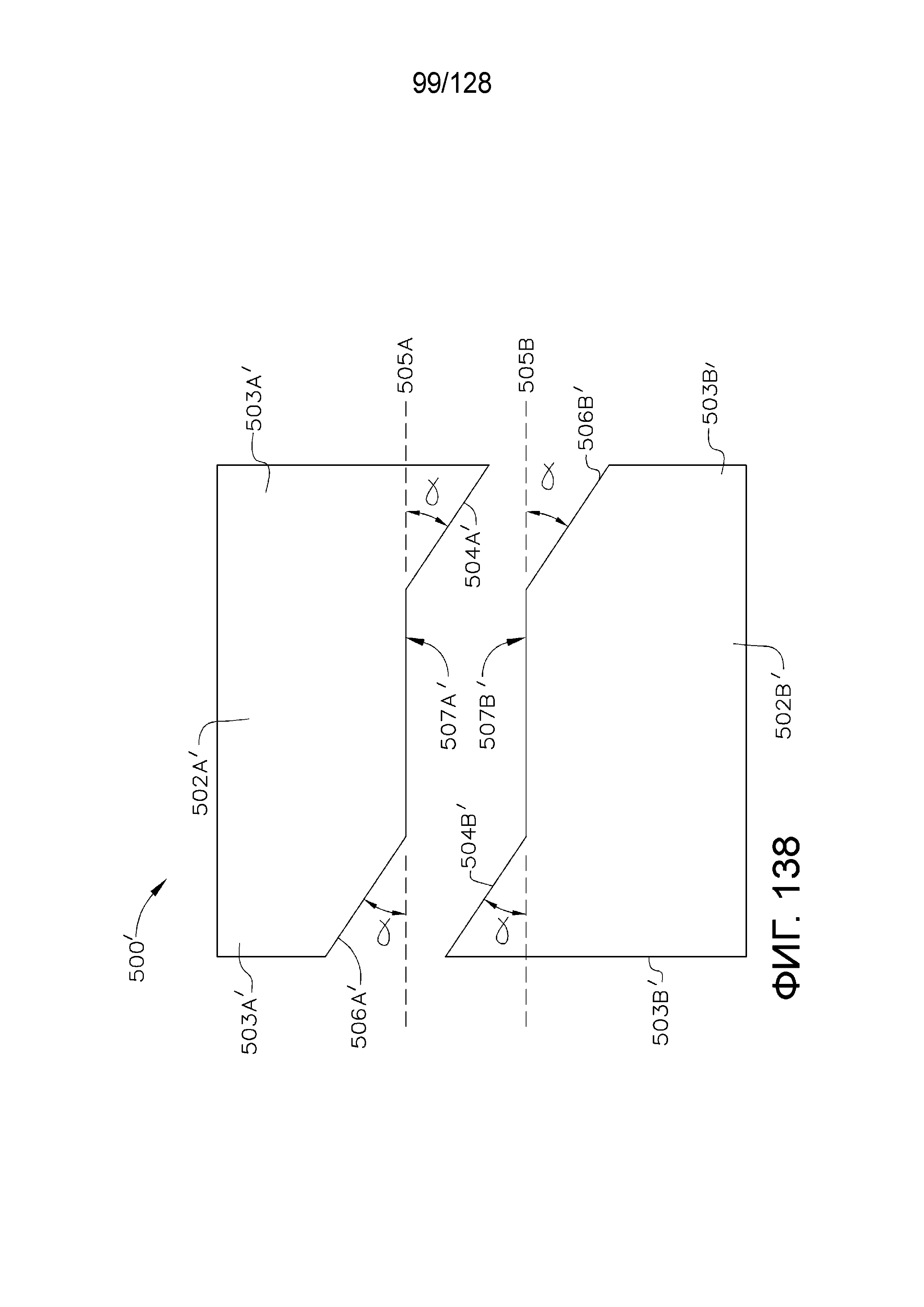
На ФИГ. 138 представлена принципиальная схема, на которой показан вид спереди одного варианта осуществления концевого эффектора, имеющего первый и второй элементы бранши, причем каждый элемент бранши имеет две наклоненные под противоположными углами контактирующие с тканью поверхности.
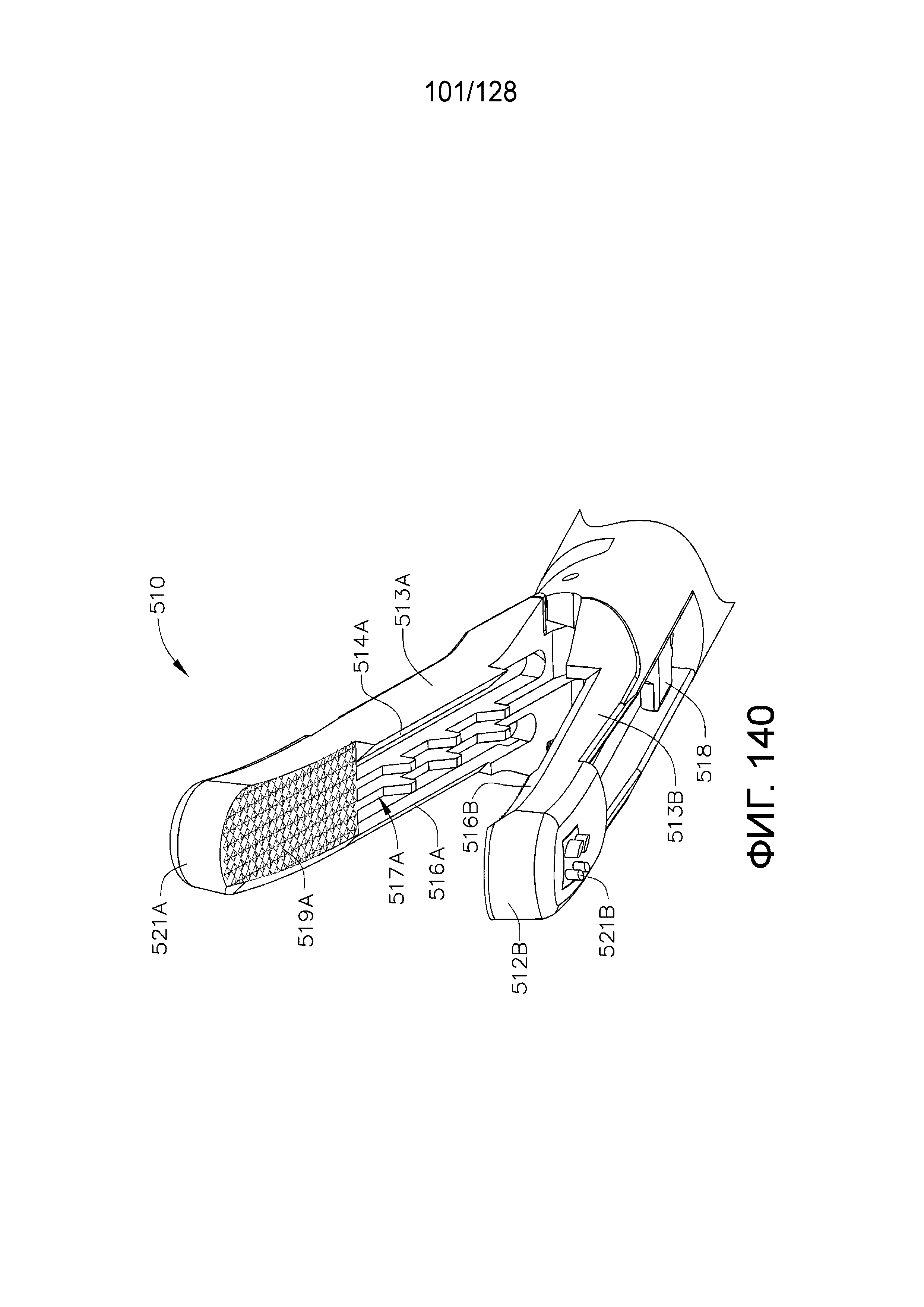
На ФИГ. 139 представлен вид в перспективе одного варианта осуществления концевого эффектора, имеющего первый и второй элементы бранши в открытом положении, и наклоненные контактирующие с тканью поверхности, проходящие вдоль части длины элементов бранши.
На ФИГ. 140 представлен другой вид в перспективе одного варианта осуществления концевого эффектора, показанного на ФИГ. 139.
На ФИГ. 141 представлен вид в перспективе одного варианта осуществления концевого эффектора, имеющего первый и второй элементы бранши в открытом положении, наклоненные контактирующие с тканью поверхности, проходящие вдоль части длины элементов бранши, и электроды, расположенные между двумя наклоненными и контактирующими с тканью поверхностями на втором элементе бранши.
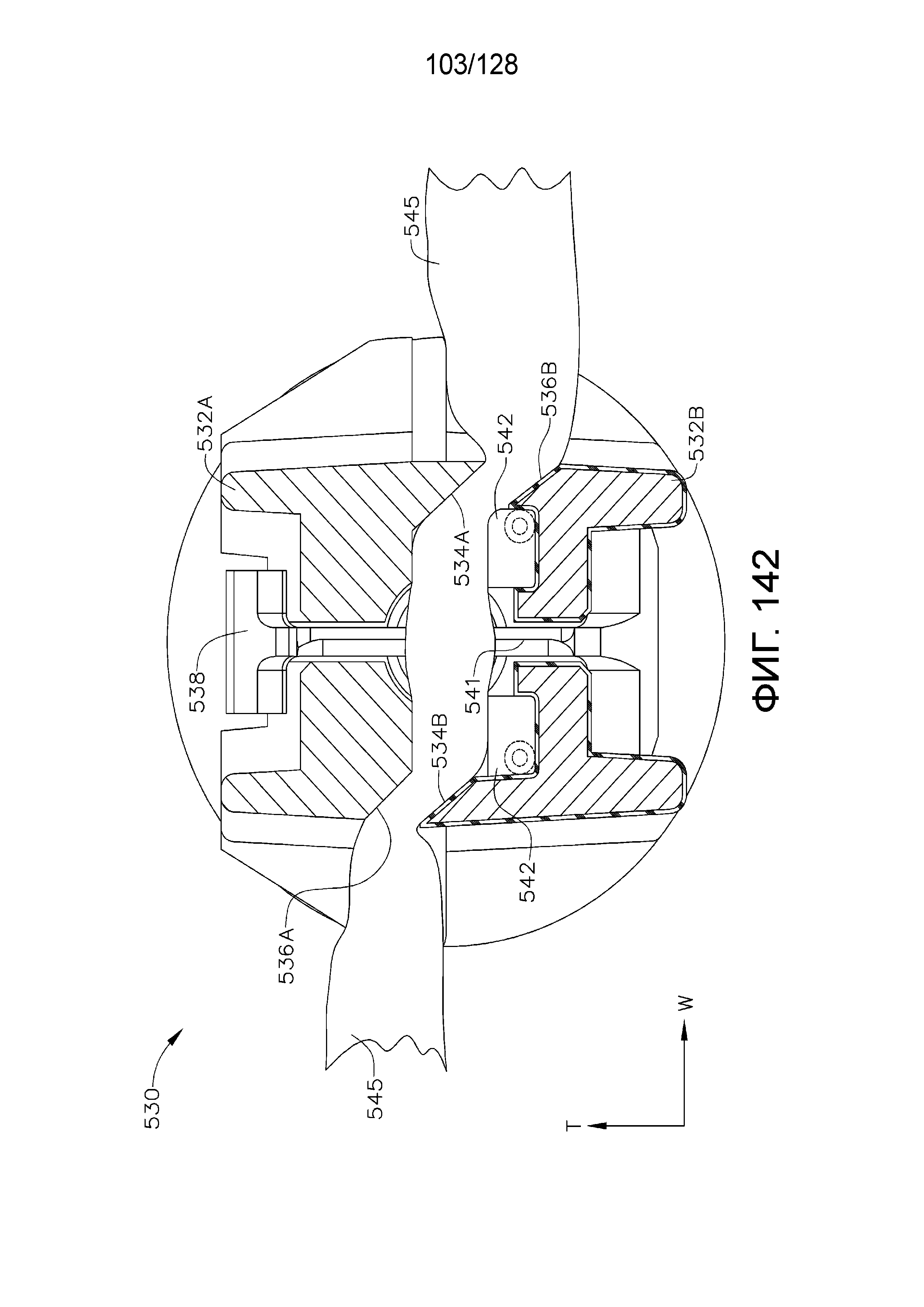
На ФИГ. 142 представлен вид в поперечном сечении одного варианта осуществления концевого эффектора, имеющего первый и второй элементы бранши в закрытом положении, и захватывающего ткань между элементами бранши, причем первый и второй элементы бранши имеют наклоненные под противоположными углам контактирующие с тканью поверхности.
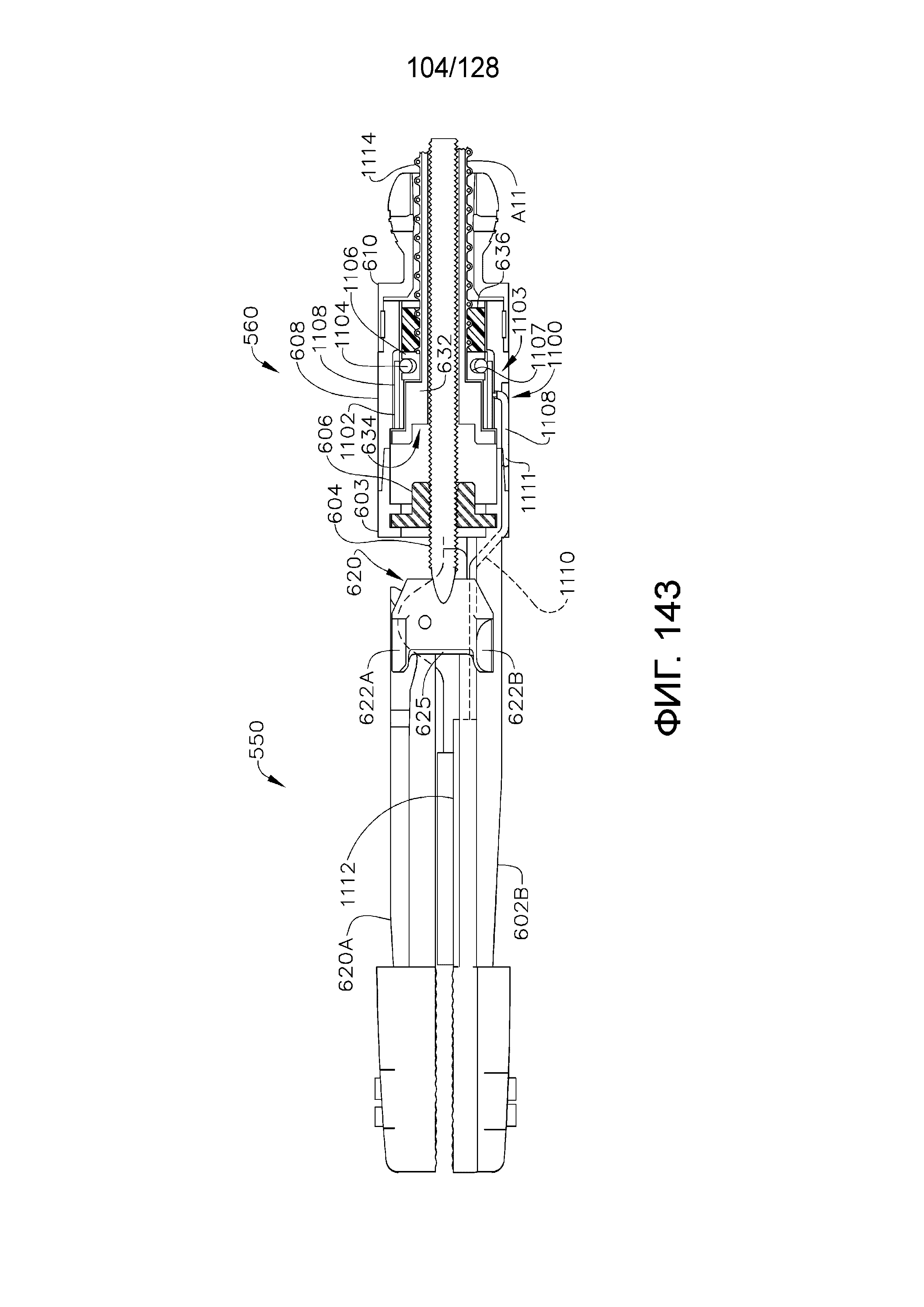
На ФИГ. 143 представлен вид в поперечном сечении одного варианта осуществления концевого эффектора и узла стержня, показанного на ФИГ. 64-82, на котором показан пример установки узла поворотного электрода.
На ФИГ. 144 представлен вид с пространственным разделением компонентов одного варианта осуществления концевого эффектора и узла стержня, показанного на ФИГ. 143, на котором показан узел поворотного электрода в установленном и разобранном виде.
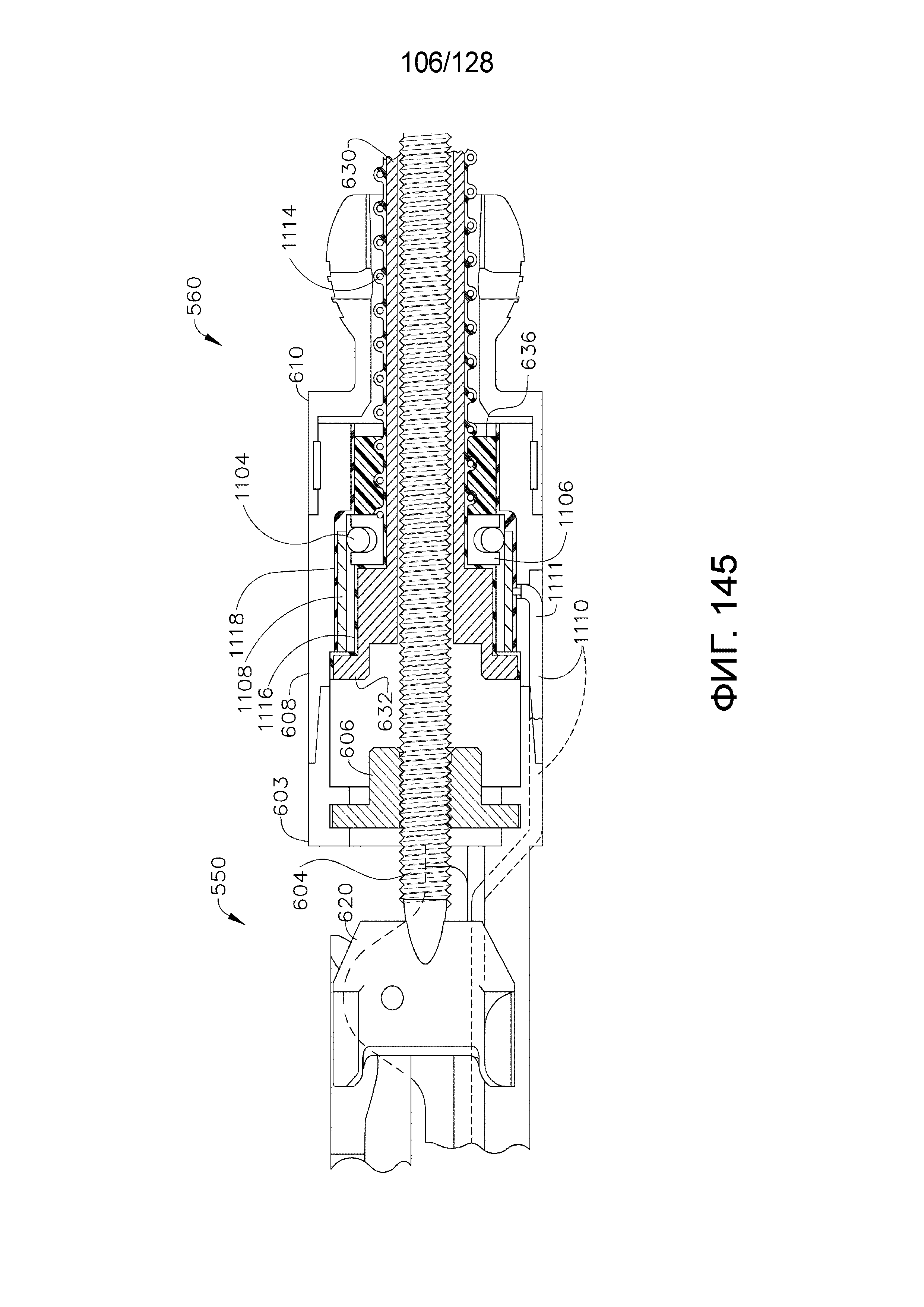
На ФИГ. 145 представлен вид в поперечном сечении одного варианта осуществления концевого эффектора и узла стержня, показанного на ФИГ. 143, на котором показан узел поворотного электрода с поворотной приводной головкой в проксимальном положении.
На ФИГ. 146 представлен вид в поперечном сечении одного варианта осуществления концевого эффектора и узла стержня, показанного на ФИГ. 143, на котором показан узел поворотного электрода с поворотной приводной головкой в дистальном положении.
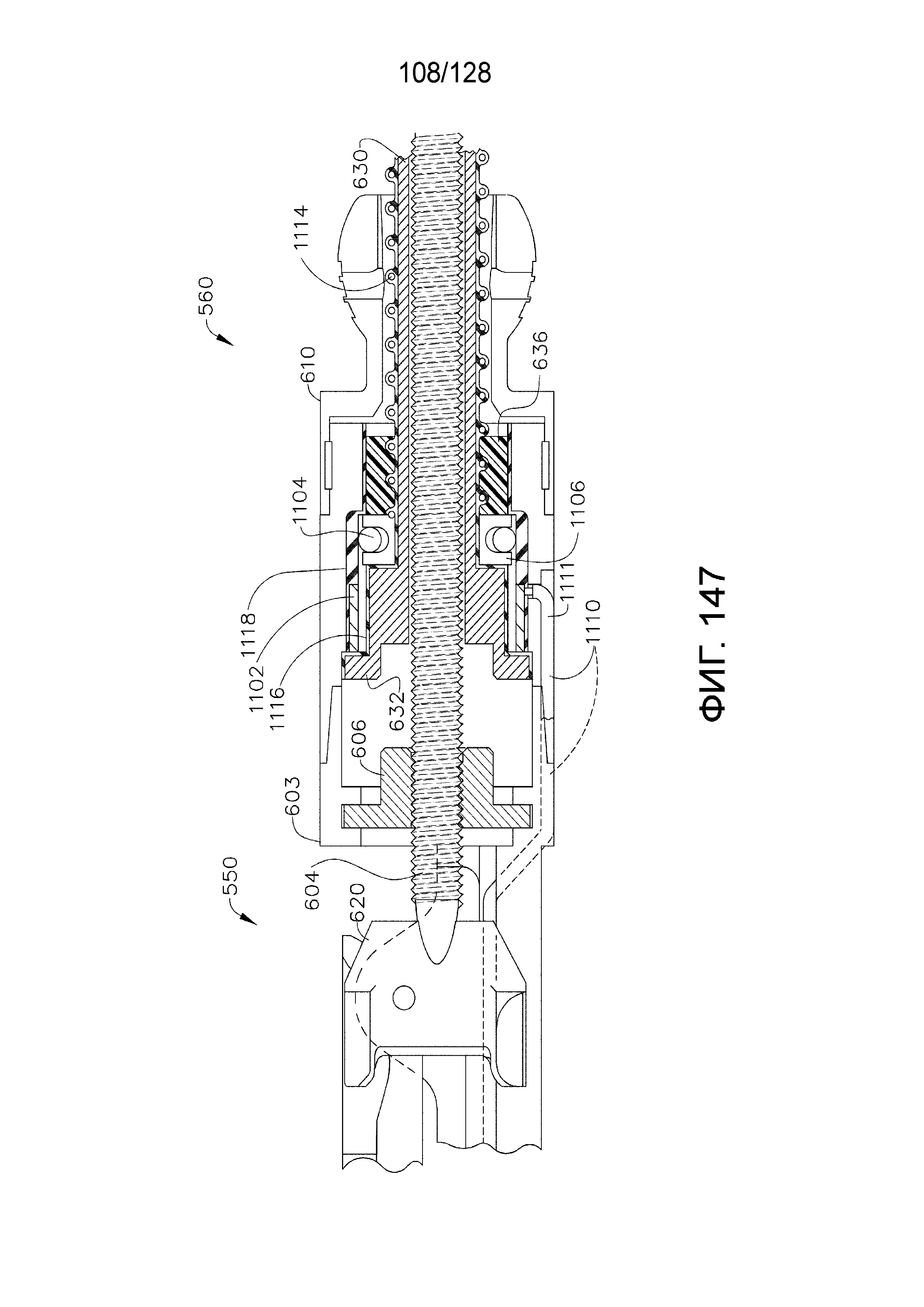
На ФИГ. 147, 148 представлены виды в поперечном сечении одного варианта осуществления концевого эффектора и узла стержня, показанного на ФИГ. 143, где продольная длина внешнего контакта выбрана таким образом, чтобы узел поворотного соединителя альтернативно устанавливал и разрывал электрическое соединение, ограниченное посредством продольного положения щеточного узла.
На ФИГ. 149, 150 представлен один вариант осуществления концевого эффектора и узла стержня, показанного на ФИГ. 143, на котором показана конфигурация, включающая две проводниковые части и соединительный узел между концевым эффектором и узлом стержня.
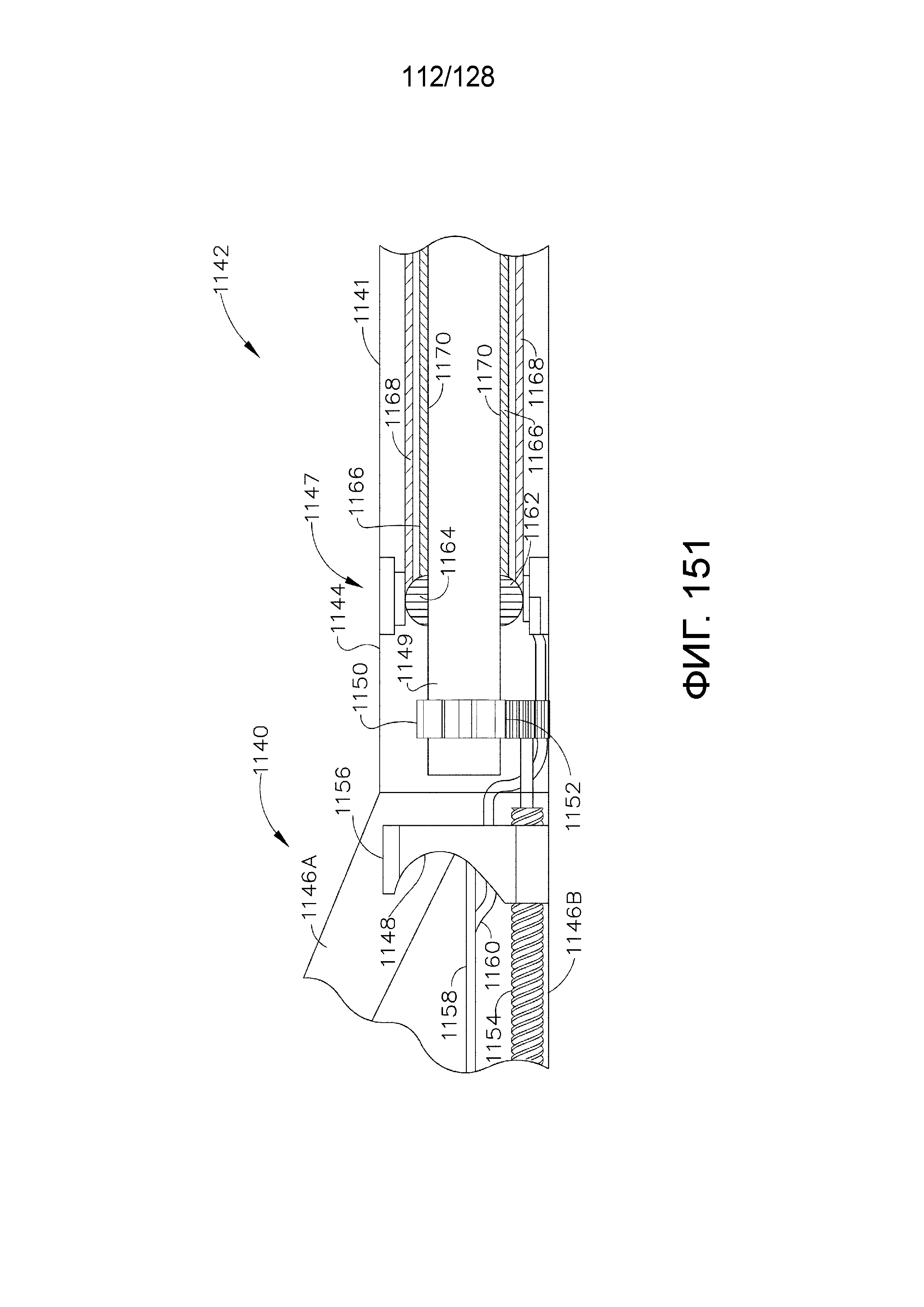
На ФИГ. 151 представлен вид в поперечном сечении одного варианта осуществления концевого эффектора и узла стержня, на котором показана другая ситуация, в которой может использоваться узел поворотного соединителя.
На ФИГ. 152 представлен вид в поперечном сечении одного варианта осуществления концевого эффектора и узла стержня, показанного на ФИГ. 83-91, на котором показан другой пример установки узла поворотного электрода.
На ФИГ. 153 показан один вариант осуществления концевого эффектора, который может применяться с различными хирургическими инструментами, включая описанные в настоящем документе.
На ФИГ. 154 показан один вариант осуществления концевого эффектора, показанного на ФИГ. 153, на котором показана контактирующая с тканью часть, расположенная смежно с продольным каналом второго элемента бранши концевого эффектора.
На ФИГ. 155 показан один вариант осуществления концевого эффектора, показанного на ФИГ. 153, с осевым сечением вдоль средней линии первого элемента бранши, на котором показана контактирующая с тканью часть, расположенная смежно с продольным каналом первого элемента бранши.
На ФИГ. 156 представлен вид в перспективе одного варианта осуществления концевого эффектора, показанного на ФИГ. 153, в открытом положении.
На ФИГ. 157 представлен вид сверху одного варианта осуществления второго элемента бранши, подходящего для применения с концевым эффектором, показанным на ФИГ. 153.
На ФИГ. 158 представлен вид снизу одного варианта осуществления первого элемента бранши, подходящего для применения с концевым эффектором, показанным на ФИГ. 153.
На ФИГ. 159 представлен вид спереди в поперечном сечении другого варианта осуществления концевого эффектора, показанного на ФИГ. 153, в закрытом положении.
На ФИГ. 160-165 представлены виды сбоку в поперечном сечении различных вариантов осуществления концевого эффектора, показанного на ФИГ. 153.
На ФИГ. 166 представлен другой вариант осуществления второго элемента бранши, подходящего для применения с концевым эффектором, показанным на ФИГ. 153, в закрытом положении, удерживающего хирургический инструмент.
На ФИГ. 167 показан один вариант осуществления второго элемента бранши, подходящего для применения с концевым эффектором, показанным на ФИГ. 153.
На ФИГ. 168 представлен другой вариант осуществления второго элемента бранши, подходящий для применения с концевым эффектором, показанным на ФИГ. 153.
ПОДРОБНОЕ ОПИСАНИЕ
Заявителю настоящей заявки также принадлежат следующие заявки на патенты, поданные в тот же день, каждая из которых полностью включена в настоящий документ путем ссылки.
1. Заявка на патент США сер. №_____________, озаглавленная «Гибкий приводной элемент» (досье патентного поверенного № END7131USNP/120135).
2. Заявка на патент США сер. №_____________, озаглавленная «Многофункциональное хирургическое устройство с электропитанием и с внешними элементами для рассечения» (досье патентного поверенного № END7132USNP/120136).
3. Заявка на патент США сер. №_____________, озаглавленная «Соединительные конфигурации для прикрепления хирургических концевых эффекторов к их приводным системам» (досье патентного поверенного № END7133USNP/120137).
4. Заявка на патент США сер. №_____________, озаглавленная «Поворотные закрывающие конфигурации с возможностью активации для хирургического концевого эффектора» (досье патентного поверенного № END7134USNP/120138).
5. Заявка на патент США сер. №_____________, озаглавленная «Хирургические концевые эффекторы, имеющие наклоненные контактирующие с тканью поверхности» (досье патентного поверенного № END7135USNP/1201390).
6. Заявка на патент США сер. №_____________, озаглавленная «Соединительная конфигурация взаимозаменяемых концевых эффекторов» (досье патентного поверенного № END7136USNP/120140).
7. Заявка на патент США сер. № _____________, озаглавленная «Конфигурации браншей и электродов хирургического концевого эффектора» (досье патентного поверенного № END7137USNP/120141).
8. Заявка на патент США сер. №_____________, озаглавленная «Многоосевые шарнирные и поворотные хирургические инструменты» (досье патентного поверенного № END7138USNP/120142).
9. Заявка на патент США сер. №_____________, озаглавленная «Дифференциальные блокирующие конфигурации для поворотных хирургических инструментов с электропитанием» (досье патентного поверенного № END7139USNP/120143).
10. Заявка на патент США сер. №_____________, озаглавленная «Взаимозаменяемый клипсонакладыватель» (досье патентного поверенного № END7140USNP/120144).
11. Заявка на патент США сер. №_____________, озаглавленная «Конфигурации блокировки пусковой системы для хирургических инструментов» (досье патентного поверенного № END7141USNP/120145).
12. Заявка на патент США сер. №_____________, озаглавленная «Узлы поворотных приводных стержней для хирургических инструментов с шарнирно поворачиваемыми концевыми эффекторами» (досье патентного поверенного № END7142USNP/120146).
13. Заявка на патент США сер. №_____________, озаглавленная «Поворотные приводные конфигурации для хирургических инструментов» (досье патентного поверенного № END7143USNP/120147).
14. Заявка на патент США сер. №_____________, озаглавленная «Роботизированное хирургическое устройство с электропитанием и с возможностью ручной активации реверсирующей системы» (досье патентного поверенного № END7144USNP/120148).
15. Заявка на патент США сер. №_____________, озаглавленная «Сменная кассета с клипсами для клипсонакладывателя» (досье патентного поверенного № END7145USNP/120149).
16. Заявка на патент США сер. №_____________, озаглавленная «Блокировка пустой кассеты с клипсами» (досье патентного поверенного № END7146USNP/120150).
17. Заявка на патент США сер. №_____________, озаглавленная «Система хирургических инструментов, включающая сменные концевые эффекторы» (досье патентного поверенного № END7147USNP/120151).
18. Заявка на патент США сер. №_____________, озаглавленная «Поворотные опорные соединительные узлы для соединения первой части хирургического инструмента со второй частью хирургического инструмента» (досье патентного поверенного № END7148USNP/120152).
Заявителю также принадлежат следующие заявки на патенты, каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США сер. № 13/118259, озаглавленная «Хирургический инструмент с беспроводной связью между блоком управления роботизированной системы и удаленным датчиком», публикация заявки на патент США № 2011-0295270 A1;
заявка на патент США сер. № 13/118210, озаглавленная «Одноразовый модуль загрузки с приводом от двигателя и роботизированным управлением», публикация заявки на патент США № 2011-0290855 A1;
заявка на патент США сер. № 13/118194, озаглавленная «Эндоскопический канал доступа с роботизированным управлением», публикация заявки на патент США № 2011-0295242;
заявка на патент США сер. № 13/118253, озаглавленная «Хирургический инструмент с роботизированным управлением и электроприводом», публикация заявки на патент США № 2011-0295269 A1;
заявка на патент США сер. № 13/118278, озаглавленная «Хирургические сшивающие устройства с роботизированным управлением, которые образуют сформированные скобы, имеющие разную длину», публикация заявки на патент США № 2011-0290851 A1;
заявка на патент США сер. № 13/118190, озаглавленная «Режущий и сшивающий инструмент с роботизированным управлением и электроприводом», публикация заявки на патент США № 2011-0288573 A1;
заявка на патент США сер. № 13/118223, озаглавленная «Стержневые поворотные приводные системы с роботизированным управлением для хирургических инструментов», публикация заявки на патент США № 2011-0290854 A1;
заявка на патент США сер. № 13/118263, озаглавленная «Хирургический инструмент с записывающими функциями и роботизированным управлением», публикация заявки на патент США № 2011-0295295 A1;
заявка на патент США сер. № 13/118272, озаглавленная «Хирургический инструмент с роботизированным управлением и функциями обратной связи по усилию», публикация заявки на патент США № 2011-0290856 A1;
заявка на патент США сер. № 13/118246, озаглавленная «Хирургический инструмент с трехрогим элементом шкива и роботизированным управлением», публикация заявки на патент США № 2011-0290853 A1; и
заявка на патент США сер. № 13/118241, озаглавленная «Хирургические сшивающие инструменты с поворачиваемыми конфигурациями для размещения скоб».
Для более полного понимания принципов структуры, работы, производства и применения устройств и способов, описанных в настоящем документе, ниже представлено описание определенных примеров осуществления. Один или более примеров данных примеров осуществления проиллюстрированы сопроводительными чертежами. Специалистам в данной области будет понятно, что устройства и способы, подробно описанные в настоящем документе и проиллюстрированные сопроводительными чертежами, представляют собой не имеющие ограничительного характера примеры осуществления и что объем различных примеров осуществления настоящего изобретения определяется только посредством пунктов формулы изобретения. Особенности, проиллюстрированные или описанные применительно к одному примеру осуществления, можно комбинировать с особенностями других примеров осуществления. Предполагается, что объем настоящего изобретения включает такие модификации и изменения.
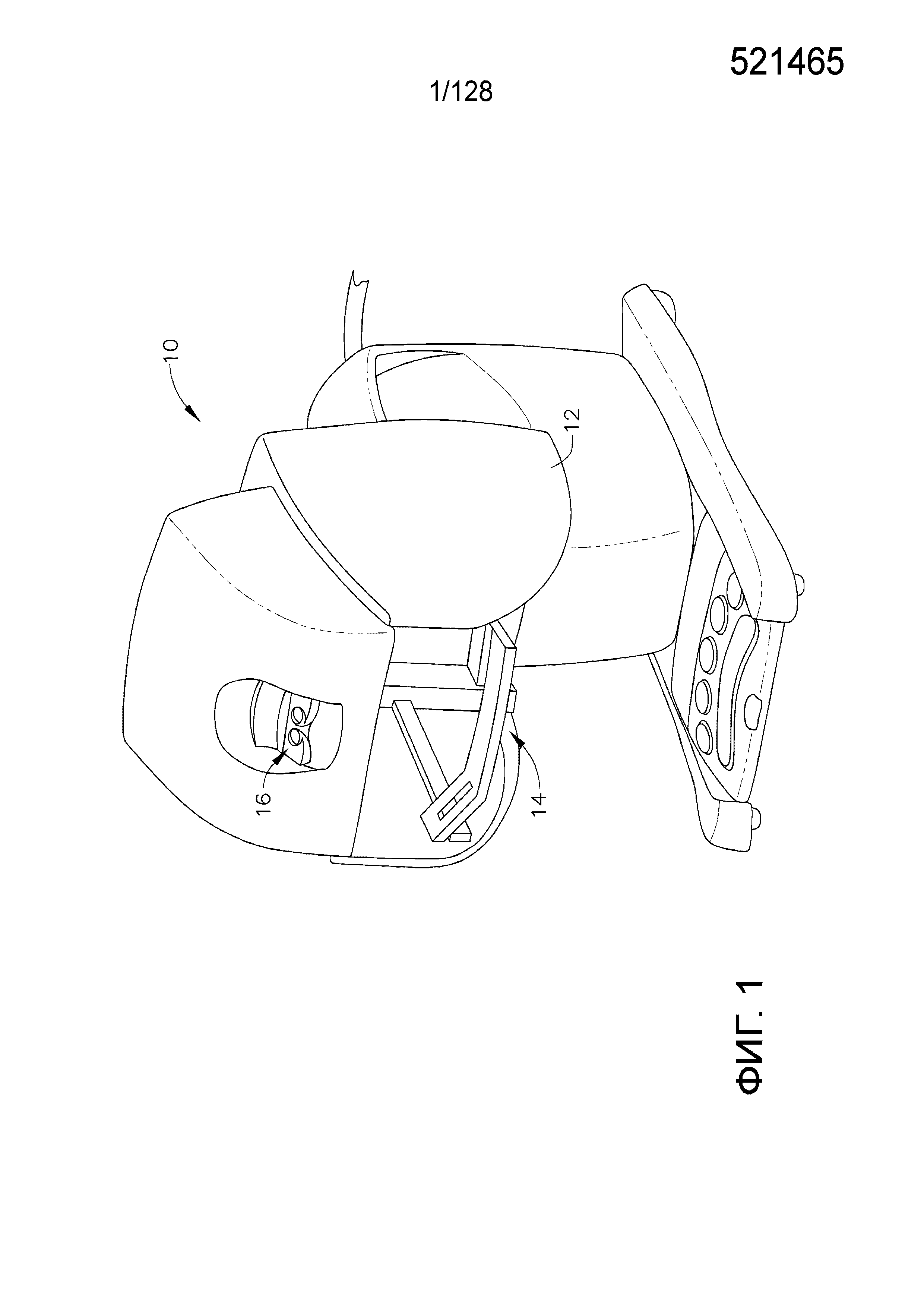
На ФИГ. 1 представлен главный контроллер 12, который используется в связи с ведомым штативом роботизированного манипулятора 20 типа, представленного на ФИГ. 2. Главный контроллер 12 и ведомый штатив роботизированного манипулятора 20, а также их соответствующие компоненты и системы управления в совокупности в настоящем документе называются роботизированной системой 10. Примеры таких систем и устройств описаны в патенте США № 7524320, который включен в настоящий документ путем ссылки. Таким образом, в настоящем документе не будут подробно описаны различные подробности таких устройств помимо тех, которые могут быть необходимы для понимания различных примеров осуществления, описанных в настоящем документе. Как известно, главный контроллер 12 по существу включает главные контроллеры (по существу представлены как элемент 14 на ФИГ. 1), которые захватывает хирург и которыми он манипулирует в пространстве, наблюдая за процедурой посредством стереоскопического дисплея 16. Главные контроллеры 12 по существу содержат ручные устройства ввода, которые предпочтительно перемещаются с множеством степеней свободы и которые часто дополнительно имеют рукоятку с возможностью активации для активации инструментов (например, для закрытия браншей зажима, приложения электрического потенциала к электроду и т.п.).
Как показано на ФИГ. 2, в одной форме роботизированный штатив манипулятора 20 выполнен с возможностью активации множества хирургических инструментов, по существу обозначенных как 30. Различные роботизированные хирургические системы и способы, использующие главный контроллер и роботизированный штатив манипулятора, описаны в патенте США № 6132368, озаглавленном «Многокомпонентная система и способ дистанционного восприятия из рабочей зоны», полное описание которого включено в настоящее описание путем ссылки. Как показано на фигуре, роботизированный штатив манипулятора 20 включает основание 22, на котором в показанном варианте осуществления поддерживаются три хирургических инструмента 30. Каждый из хирургических инструментов 30 поддерживается рядом рычажных механизмов, шарнирно поворачиваемых вручную (по существу их называют настраиваемыми соединениями 32), и роботизированным манипулятором 34. Данные структуры в настоящем документе показаны с защитными чехлами, направленными на большую часть роботизированного рычажного механизма. Данные защитные чехлы могут быть необязательными и могут быть ограничены в размерах или полностью устранены для минимизации инерции, с которой сталкиваются сервомеханизмы, используемые для манипулирования такими устройствами, для ограничения объема перемещающихся компонентов, чтобы избежать столкновения, а также для ограничения общего веса штатива 20. Штатив 20 по существу имеет размеры, подходящие для транспортировки штатива 20 между операционными. Как правило, штатив 20 выполнен с возможностью прохода через стандартные двери операционной и помещения в стандартные лифты больниц. Штатив 20 будет предпочтительно иметь соответствующий вес и включать колесную систему (или другое средство транспортировки), которая позволит одному человеку располагать штатив 20 смежно с операционным столом.
Как показано на ФИГ. 3, роботизированные манипуляторы 34 включают рычажной механизм 38, который ограничивает перемещение хирургического инструмента 30. Рычажный механизм 38 включает жесткие звенья, соединенные вместе посредством поворотных соединений в параллелограммной конфигурации, так что хирургический инструмент 30 поворачивается вокруг точки в пространстве 40, как более полно описано в патенте США № 5817084, полное описание которого включено в настоящий документ путем ссылки. Параллелограммная конфигурация ограничивает поворот вокруг оси 40a, иногда называемой горизонтальной осью поворота. Звенья, поддерживающие параллелограммный рычажной механизм, шарнирно установлены в настраиваемые соединения 32 (ФИГ. 2) таким образом, что хирургический инструмент 30 дополнительно поворачивается вокруг оси 40b, иногда называемой вертикальной осью поворота. Горизонтальная и вертикальная оси поворота 40a, 40b пересекаются в удаленном центре 42, выровненном вдоль стержня 44 хирургического инструмента 30. Хирургический инструмент 30 может иметь дополнительные степени свободы, поддерживаемые манипулятором 50, включая скользящее движение хирургического инструмента 30 вдоль продольной оси инструмента LT-LT. Когда хирургический инструмент 30 скользит вдоль оси инструмента LT-LT относительно манипулятора 50 (стрелка 40c), удаленный центр 42 остается неподвижным относительно основания 52 манипулятора 50. Таким образом, весь манипулятор по существу перемещается для изменения положения удаленного центра 42. Рычажной механизм 54 манипулятора 50 приводится в движение посредством ряда двигателей 56. Данные двигатели активно перемещают рычажной механизм 54 в ответ на команды, поступающие от процессора системы управления. Двигатели 56 также используют при манипуляциях хирургическим инструментом 30. Альтернативная структура настраиваемых соединений показана на ФИГ. 4. В данном варианте осуществления хирургический инструмент 30 поддерживается альтернативной структурой манипулятора 50' между двумя инструментами манипуляции тканью.
Другие варианты осуществления могут включать широкий спектр альтернативных роботизированных структур, включая те, которые описаны в патенте США № 5878193, озаглавленном «Автоматизированная эндоскопическая система для оптимального расположения», полное описание которого включено в настоящий документ путем ссылки. Кроме того, в то время как передача данных между роботизированным компонентом и процессором роботизированной хирургической системы описана со ссылкой на обмен данными между хирургическим инструментом 30 и главным контроллером 12, аналогичная связь может происходить между схемой манипулятора, настраиваемым соединением, эндоскопом или другим устройством захвата изображения или т.п. и процессором роботизированной хирургической системы для проверки совместимости компонентов, компонентной идентификации компонентов, компонентной калибровки (например, смещения или т.п.) соединения, подтверждения соединения компонента с роботизированной хирургической системой или т.п.
Хирургический инструмент 100, надлежащим образом адаптированный для применения в роботизированной системе 10, показан на ФИГ. 5-6. На ФИГ. 5 представлен дополнительный вариант осуществления хирургического инструмента 100 и электрохирургического концевого эффектора 3000. Как представлено на ФИГ. 5, хирургический инструмент 100 включает электрохирургический концевой эффектор 3000. Электрохирургический концевой эффектор 3000 может использовать электрическую энергию для лечения и/или разрушения ткани. Электрохирургический концевой эффектор 3000 по существу содержит первый и второй элементы бранши 3008A, 3008B, которые могут быть прямыми, как показано на ФИГ. 6-10, или изогнутыми, как показано на различных других фигурах, описанных в настоящем документе. Один или оба элемента бранши 3008A, 3008B по существу содержат различные электроды для подачи энергии на ткань для электрохирургии. Хирургический инструмент 100 по существу включает узел удлиненного стержня 200, функционально соединенный с манипулятором 50 посредством монтажной части инструмента, по существу обозначенной как элемент 300. Электрохирургические инструменты (например, хирургические инструменты, которые включают электрохирургический концевой эффектор, такие как инструмент 100 и концевой эффектор 3000) можно использовать в любом подходящем типе хирургических процедур, включая, например, открытую, лапароскопическую, эндоскопическую процедуру и т.п.
По существу электрохирургические инструменты содержат один или более электродов для подачи электрического тока. Электроды могут располагаться вплотную к ткани и/или относительно ткани таким образом, чтобы электрический ток мог проходить через ткань. Электрический ток может генерировать тепло в ткани, которое, в свою очередь, вызывает образование в ткани и/или между тканями одного или более гемостатических уплотнений. Например, нагревание ткани электрическим током может вызывать по меньшей мере частичную денатурацию белков в ткани. Такие белки, как, например, коллаген, могут денатурировать с образованием белковоподобной амальгамы, которая смешивается, сливается или «сплавляется» при ренатурации белка. По мере того как обработанная область со временем заживает, данная биологическая «спайка» может рассасываться в течение проходящего в организме процесса заживления раны.
Электрическая энергия, подаваемая электрохирургическими инструментами, может иметь любую подходящую форму, включая, например, постоянный или переменный ток. Например, электрическая энергия может представлять собой высокочастотный переменный ток, такой как радиочастотная (РЧ) энергия. РЧ энергия может включать энергию в диапазоне от 300 килогерц (кГц) до 1 мегагерца (МГц). При воздействии на ткань РЧ энергия может вызывать возмущение ионов, повышая температуру ткани. Кроме того, РЧ энергия может обеспечивать отчетливую границу между затронутой тканью и прочей окружающей тканью, что позволяет хирургам работать с высоким уровнем точности и контроля. Низкая рабочая температура РЧ энергии позволяет хирургам удалять, стягивать или формовать мягкую ткань при одновременной герметизации кровеносных сосудов. РЧ-энергия особенно хорошо работает на соединительной ткани, которая преимущественно образована из коллагена и стягивается при приведении в контакт с высокой температурой.
В определенных конфигурациях некоторые биполярные (например, двухэлектродные) электрохирургические инструменты могут содержать противоположные первый и второй элементы бранши, где лицевая поверхность каждой бранши может содержать токовый контур и/или электрод. В процессе применения ткань можно захватить между лицевыми поверхностями браншей таким образом, чтобы электрический ток мог проходить между электродами в противоположных элементах бранши и через ткань, расположенную между ними. Такие инструменты смогут коагулировать, герметизировать или «сплавлять» различные типы тканей, такие как анатомические структуры, имеющие стенки с неравномерным или толстым волокнистым содержимым, пучки разнородных анатомических структур, по существу толстые анатомические структуры и/или ткани с толстыми соединительнотканными слоями, такие как кровеносные сосуды большого диаметра. Некоторые варианты осуществления могут включать скальпель или режущий край для рассечения ткани, например, в течение процесса применения энергии для электрохирургии или после него. В случае рассечения и герметизации кровеносных сосудов большого диаметра может потребоваться высокопрочная спайка ткани сразу же после лечения.
На ФИГ. 6 представлен вид в перспективе одного варианта осуществления электрохирургического инструмента 100 в электрической связи с генератором 3002. Электрохирургический инструмент 100 в сочетании с генератором 3002 может быть выполнен с возможностью подачи энергии, такой как, например, электрическая энергия, ультразвуковая энергия и/или тепловая энергия, к ткани пациента. В показанном варианте осуществления и в функционально аналогичных вариантах осуществления генератор 3002 соединен с электрохирургическим инструментом 100 посредством подходящего передающего носителя, такого как кабель 3010. В одном варианте осуществления генератор 3002 соединен с контроллером, таким как, например, блок управления 3004. В различных вариантах осуществления блок управления 3004 может быть выполнен заодно с генератором 3002 или может представлять собой модуль или устройство с отдельной схемой, электрически соединенные с генератором 3002 (данный вариант показан пунктиром). Хотя в описанном в настоящий момент варианте осуществления генератор 3002 показан отдельно от электрохирургического инструмента 100, в одном варианте осуществления генератор 3002 (и/или блок управления 3004) может быть выполнен заодно с электрохирургическим инструментом 100 с образованием единой электрохирургической системы. Например, в некоторых вариантах осуществления генератор или эквивалентная схема может находиться внутри монтажной части для инструмента 300 и/или внутри рукоятки в подходящих ручных вариантах осуществления (как описано в настоящем документе).
Генератор 3002 может содержать устройство ввода 3006, размещенное, на передней панели пульта управления генератора 3002. Устройство ввода 3006 может содержать любое подходящее устройство, генерирующее сигналы, подходящие для программирования работы генератора 3002, такое как, например, клавиатура или порт ввода. В одном варианте осуществления генератор 3002 можно соединить с различными электродами в первом элементе бранши 3008A и втором элементе бранши 3008B. Кабель 3010, соединяющий монтажную часть для инструмента 300 с генератором 3002, может содержать множество электрических проводников для подведения электрической энергии к положительному (+) и отрицательному (-) электродам электрохирургического инструмента 100. Блок управления 3004 можно использовать для активации генератора 3002, который может функционировать в качестве источника энергии. В различных вариантах осуществления генератор 3002 может содержать, например, источник РЧ излучения, источник ультразвука, источник постоянного тока и/или источник электрической энергии любого другого подходящего типа.
В различных вариантах осуществления хирургический инструмент 100 может содержать по меньшей мере один соединитель системы подачи 3012 и по меньшей мере один обратный проводник 3014, причем ток может подаваться к электрохирургическому инструменту 100 посредством соединителя системы подачи 3012, причем ток может течь обратно к генератору 3002 посредством обратного проводника 3014. В различных вариантах осуществления соединитель системы подачи 3012 и обратный проводник 3014 могут содержать изолированные провода и/или любой другой подходящий тип проводника. В некоторых вариантах осуществления, как описано ниже, соединитель системы подачи 3012 и возвратный проводник 3014 могут входить в состав и/или могут содержать кабель 3010, направленный между или по меньшей мере частично между генератором 3002 и концевым эффектором 3000 электрохирургического инструмента 100. В любом случае генератор 3002 может быть выполнен с возможностью приложения достаточного дифференциала напряжения между соединителем системы подачи 3012 и обратным проводником 3014, чтобы через концевой эффектор 3000 проходил достаточный ток.
Электрохирургический концевой эффектор 3000 можно выполнить с возможностью захвата и рассечения ткани и для одновременного сплавления захваченной ткани путем управляемой подачи энергии (например, РЧ энергии). На ФИГ. 7 показан один вариант осуществления электрохирургического концевого эффектора 300 с открытыми элементами бранши 3008A, 3008B и выполненным с возможностью осевого перемещения элементом 3016 в проксимально оттянутом положении. На ФИГ. 8 показан один вариант осуществления электрохирургического концевого эффектора 300 с закрытыми элементами бранши 3008A, 3008B и выполненным с возможностью осевого перемещения элементом 3016 в частично продвинутом положении.
В процессе применения элементы бранши 3008A, 3008B закрываются, таким образом захватывая или зацепляя ткань вокруг продольной оси инструмента LT-LT, образованной перемещаемым по оси элементом 3016 (или его дистальной частью). Первый элемент бранши 3008A и второй элемент бранши 3008B также могут оказывать сжимающее усилие на ткань. В некоторых вариантах осуществления удлиненный стержень 200, вместе с первым элементом бранши 3008A и вторым элементом бранши 3008B, может поворачиваться на полный оборот 360°, как показано стрелкой 3018 (см. ФИГ. 8), относительно монтажной части для инструмента 300.
Каждый из первого элемента бранши 3008A и второго элемента бранши 3008B может содержать удлиненный паз или канал 3020A и 3020B (ФИГ. 7) соответственно, расположенные снаружи вдоль их соответствующих средних частей. Кроме того, каждый из первого элемента бранши 3008A и второго элемента бранши 3008B может содержать захватывающие ткань элементы, такие как зубцы 3022, расположенные на внутренних частях первого элемента бранши 3008A и второго элемента бранши 3008B. Нижний элемент бранши 3008B может образовывать корпус бранши с поверхностью для подачи энергии или электродом 3024B. Например, электрод 3024B может находиться в электрической связи с генератором 3002 посредством соединителя системы подачи 3012. Поверхность для подачи энергии 3024A на верхнем первом элементе бранши 3008 может образовывать возвратный контур для энергии при электрохирургии. Например, поверхность для подачи энергии 3024A может находиться в электрической связи с обратным проводником 3014. В показанном варианте осуществления и в функционально аналогичных вариантах осуществления другие проводящие части хирургического инструмента 100, включая, например, элементы бранши 3008A, 3008B, стержень 200 и т.п., могут образовывать весь возвратный контур или его часть. В настоящем документе описаны различные конфигурации электродов и различные конфигурации для соединения поверхностей для подачи энергии 3024A, 3024B с проводниками 3012, 3014. Кроме того, следует понимать, что подающий электрод 3024B может находиться на нижнем элементе бранши 3008B, как показано на фигуре, или на верхнем элементе бранши 3008A.
Дистальное и проксимальное поступательное перемещение перемещаемого по оси элемента 3016 можно использовать для открытия и закрытия элементов бранши 3008A, 3008B и для рассечения ткани, удерживаемой между ними. На ФИГ. 9 представлен вид в перспективе одного варианта осуществления перемещаемого по оси элемента 3016 хирургического инструмента 100. Перемещаемый по оси элемент 3016 может содержать одну или более частей, но в любом случае он может быть выполнен с возможностью перемещения или поступательного перемещения относительно удлиненного стержня 200 и/или элементов бранши 3008A, 3008B. Кроме того, по меньшей мере в одном варианте осуществления перемещаемый по оси элемент 3016 может быть получен из упрочненной осаждением нержавеющей стали 17-4. Дистальный конец перемещаемого по оси элемента 3016 может содержать снабженный двутавровый элемент с фланцами, выполненный с возможностью скольжения внутри каналов 3020AA и 3020B в элементах бранши 3008A и 3008B. Перемещаемый по оси элемент 3016 может скользить внутри каналов 3020A, 3020B, открывая и закрывая первый элемент бранши 3008A и второй элемент бранши 3008B. Дистальный конец перемещаемого по оси элемента 3016 также может содержать верхний фланец, или c образную часть 3016A, и нижний фланец, или c образную часть 3016B. Фланцы 3016A и 3016B соответственно образуют внутренние криволинейные поверхности 3026A и 3026B для зацепления обращенных наружу поверхностей первого элемента бранши 3008A и второго элемента бранши 3008B. Открытие закрытие элементов бранши 3008A и 3008B может прилагать очень сильное сжимающее усилие к ткани благодаря использованию кулачковых механизмов, которые могут включать перемещаемый по оси двутавровый элемент 3016 и обращенные наружу поверхности 3028A, 3028B элементов бранши 3008A, 3008B.
Более конкретно, как показано на ФИГ. 7-9, внутренние криволинейные поверхности 3026А и 3026B дистального конца перемещаемого по оси элемента 3016 в совокупности могут быть выполнены с возможностью скользящего зацепления с первой обращенной наружу поверхностью 3028A и второй обращенной наружу поверхностью 3028B первого элемента бранши 3008A и второго элемента бранши 3008B соответственно. Канал 3020A в первом элементе бранши 3008A и канал 3020B во втором элементе бранши 3008B могут быть выполнены по форме и размеру с возможностью обеспечивать движение перемещаемого по оси элемента 3016, который может содержать режущий ткань элемент 3030, например, содержащий острый дистальный край. На ФИГ. 8, например, представлен дистальный конец перемещаемого по оси элемента 3016, продвинутого по меньшей мере частично через каналы 3020A и 3020B (ФИГ. 7). Продвижение перемещаемого по оси элемента 3016 может закрывать концевой эффектор 3000, находящийся в открытой конфигурации, показанной на ФИГ. 7. В закрытом положении, показанном на ФИГ. 8, верхний первый элемент бранши 3008A и нижний второй элемент бранши 3008B образуют зазор или расстояние D между первой поверхностью для подачи энергии 3024A и второй поверхностью для подачи энергии 3024B первого элемента бранши 3008A и второго элемента бранши 3008B соответственно. В различных вариантах осуществления расстояние D может составлять, например, от приблизительно 0,001 см до приблизительно 0,10 см (от приблизительно 0,0005 дюйма до приблизительно 0,040 дюйма), а в некоторых вариантах осуществления, например, от приблизительно 0,003 см до приблизительно 0,025 см (от приблизительно 0,001 дюйма до приблизительно 0,010 дюйма). Кроме того, края первой поверхности для подачи энергии 3024A и второй поверхности для подачи энергии 3024B могут быть скруглены для предотвращения рассечения ткани.
На ФИГ. 10 представлен вид в разрезе одного варианта осуществления концевого эффектора 3000 хирургического инструмента 100. Зацепляющая или контактирующая с тканью поверхность 3024B нижнего элемента бранши 3008B выполнена с возможностью подачи энергии к ткани, по меньшей мере частично, через кондуктивно резистивный матрикс, такой как корпус с переменным, обладающим положительным температурным коэффициентом (ПТК) сопротивлением, как более подробно описано ниже. По меньшей мере на одном из верхнего и нижнего элемента бранши 3008A, 3008B может располагаться по меньшей мере один электрод 3032, выполненный с возможностью подачи энергии от генератора 3002 к захваченной ткани. На захватывающей или контактирующей с тканью поверхности 3024A верхнего элемента бранши 3008A может располагаться аналогичный кондуктивно резистивный матрикс (т.е. материал с ПТК), или в некоторых вариантах осуществления поверхность может представлять собой, например, проводящий электрод или изолирующий слой. В альтернативном варианте осуществления на зацепляющих поверхностях элементов бранши могут располагаться любые компоненты для подачи энергии, описанные в патенте США № 6773409, поданном 22 октября 2001 г., озаглавленном «СТРУКТУРА ЭЛЕКТРОХИРУРГИЧЕСКИХ БРАНШЕЙ ДЛЯ КОНТРОЛИРУЕМОЙ ПОДАЧИ ЭНЕРГИИ», описание которого полностью включено в настоящий документ путем ссылки.
Каждая из первой подающей энергию поверхности 3024A и второй подающей энергию поверхности 3024B может находиться в электрической связи с генератором 3002. Первая поверхность для подачи энергии 3024A и вторая поверхность для подачи энергии 3024B могут быть выполнены с возможностью приведения в контакт с тканью и подачи электрической энергии к захваченной ткани, обеспечивая герметизацию или сварку ткани. Блок управления 3004 регулирует электрическую энергию, подаваемую электрическим генератором 3002, который, в свою очередь, подает энергию для электрохирургии к первой поверхности для подачи энергии 3024A и второй поверхности для подачи энергии 3024B. Подачу энергии можно инициировать любым подходящим способом (например, при активации роботизированной системы 10). В одном варианте осуществления энергию на электрохирургический инструмент 100 можно подавать с генератора 3002 ножной педалью 3034 (ФИГ. 6). При активации ножная педаль 3034, например, активирует генератор 3002, который подает электрическую энергию на концевой эффектор 3000. Блок управления 3004 может регулировать мощность, создаваемую генератором 3002 в течение процесса активации. Хотя ножная педаль3034 является подходящей во многих ситуациях, можно использовать и другие подходящие типы переключателей.
Как указано выше, энергия для электрохирургии, подаваемая электрическим генератором 3002 и регулируемая или иным образом контролируемая блоком управления 3004, может представлять собой радиочастотную (РЧ) энергию или другие подходящие формы электрической энергии. Кроме того, одна или обе противоположные поверхности для подачи энергии 3024A и 3024B могут иметь корпуса с переменным, обладающим положительным температурным коэффициентом (ПТК) сопротивлением, которые находятся в электрической связи с генератором 3002 и блоком управления 3004. Дополнительная информация относительно электрохирургических концевых эффекторов, механизмов закрытия браншей и электрохирургических поверхностей для подачи энергии описана в следующих патентах США и опубликованных заявках на патент: патенты США №№ 7087054; 7083619; 7070597; 7041102; 7011657; 6929644; 6926716; 6913579; 6905497; 6802843; 6770072; 6656177; 6533784 и 6500,176, а также опубликованные заявки на патент США №№ 2010/0036370 и 2009/0076506, все из которых полностью включены в настоящий документ путем ссылки и являются частью настоящего описания.
В одном варианте осуществления генератор 3002 можно реализовать в виде электрохирургического блока (ESU), способного подавать мощность, достаточную для осуществления биполярной электрохирургии с использованием радиочастотной (РЧ) энергии. В одном варианте осуществления ESU может представлять собой биполярное устройство ERBE ICC 350, доступное в продаже от компании ERBE USA, Inc., г. Мариетта, штат Джорджия. В некоторых вариантах осуществления, например, при применении в биполярной электрохирургии, можно использовать хирургический инструмент, имеющий активный электрод и обратный электрод, причем активный и обратный электроды могут быть расположены вплотную, смежно и/или в электрическом контакте с обрабатываемой тканью, чтобы ток мог идти от активного электрода через корпуса с положительным температурным коэффициентом (ПТК) и к обратному электроду через ткань. Таким образом, в различных вариантах осуществления электрохирургическая система 150 может содержать подающий контур и возвратный контур, причем захваченная ткань для обработки входит в данную схему или замыкает ее. В одном варианте осуществления генератор 3002 может представлять собой монополярный РЧ блок ESU, а электрохирургический инструмент 100 может содержать монополярный концевой эффектор 3000, в который интегрированы один или более активных электродов. В такой системе для генератора 3002 может потребоваться обратная пластина, находящаяся в тесном контакте с пациентом в месте, удаленном от операционного поля, и/или другой подходящий возвратный контур. Обратная пластина может быть соединена с генератором 3002 посредством кабеля.
В процессе эксплуатации электрохирургического инструмента 100 врач по существу захватывает ткань, подает энергию на захваченную ткань для образования сплавления или уплотнения (например, путем активации кнопки 214 и/или педали 216) и затем выталкивает режущий ткань элемент 3030 на дистальном конце перемещаемого по оси элемента 3016 через захваченную ткань. В соответствии с различными вариантами осуществления поступательное перемещение перемещаемого по оси элемента 3016 может проводиться в заданном темпе или иным образом контролироваться, чтобы движение перемещаемого по оси элемента 3016 проходило с подходящей скоростью. При контроле скорости движения повышается вероятность того, что захваченная ткань будет герметизирована надлежащим и функциональным образом перед ее рассечением режущим элементом 3030.
В случае варианта осуществления, представленного на ФИГ. 11-15, монтажная часть для инструмента 300 включает монтажную пластину для инструмента 304, которая функционально поддерживает множество (четыре показаны на ФИГ. 15) поворачиваемых корпусных частей, ведомых дисков или элементов 306, каждый из которых включает пару штифтов 308, которые направлены от поверхности ведомого элемента 306. Один штифт 308 расположен ближе к оси поворота каждого ведомого элемента 306, чем другой штифт 308 того же ведомого элемента 306, что позволяет обеспечить выравнивание ведомого элемента 306 под положительным углом. Стыковочный элемент 302 может включать адаптерную часть 310, которая выполнена с возможностью монтажного зацепления монтажной пластины 304, как дополнительно описано ниже. Показанная адаптерная часть 310 включает совокупность контактных соединительных штифтов 312 (ФИГ. 13), которые могут быть соединены с устройством памяти печатной платой, находящейся внутри монтажной части 300. Хотя стыковочный элемент 302 описан применительно к механическим, электрическим и магнитным соединительным элементам, следует понимать, что в других вариантах осуществления можно использовать различные формы телеметрии, включая инфракрасную, индуктивную связь или т.п.
Как представлено на ФИГ. 11-14, адаптерная часть 310 по существу включает сторону инструмента 314 и сторону держателя 316. На плавающей пластине 318, которая имеет ограниченный диапазон перемещения по отношению к окружающей структуре адаптера перпендикулярно к основным поверхностям адаптера 310, установлено множество поворачиваемых элементов 320. Осевое перемещение плавающей пластины 318 позволяет отсоединять поворачиваемые элементы 320 от монтажной части для инструмента 300 при активации рычагов или других конструкций фиксаторов вдоль сторон корпуса монтажной части для инструмента (не показана). В других вариантах осуществления можно использовать другие механизмы/конфигурации для разъемного соединения монтажной части для инструмента 300 с адаптером 310. В вариантах осуществления, представленных на ФИГ. 11-15, поворачиваемые элементы 320 упруго установлены на плавающей пластине 318 с помощью упругих радиальных элементов, которые выступают зубцами по окружности поворачиваемых элементов 320. Поворачиваемые элементы 320 могут перемещаться по оси относительно пластины 318, отклоняя данные упругие структуры. В первом осевом положении (к стороне инструмента 314) поворачиваемые элементы 320 могут свободно поворачиваться без ограничения угла поворота. Однако при перемещении поворачиваемых элементов 320 по оси к стороне инструмента 314 язычки 322 (радиально направленные от поворачиваемых элементов 320) латерально зацепляют стопоры на плавающих пластинах таким образом, чтобы ограничивать угол поворота поворачиваемых элементов 320 вокруг их осей. Данный ограниченный поворот можно использовать для того, чтобы зацепить поворачиваемые элементы 320 с приводными штифтами 332 соответствующей части держателя инструмента 330 роботизированной системы 10, когда приводные штифты 332 будут толкать поворачиваемые элементы 320 в положение с ограниченным углом поворота, пока штифты 332 не выровняются с отверстиями 334' (и не пройдут вовнутрь). Отверстия 334 на стороне инструмента 314 и отверстия 334’ на стороне держателя 316 поворачиваемых элементов 320 выполнены с возможностью точного выравнивания приводных элементов 306 (ФИГ. 15) монтажной части для инструмента 300 с приводными элементами 336 держателя инструмента 330. Как описано выше в отношении внутренних и внешних штифтов 308 ведомых элементов 306, отверстия 304, 304' находятся на отличающихся расстояниях от оси поворота соответствующих поворачиваемых элементов 306 таким образом, чтобы не произошло выравнивание под углом 180 градусов от предполагаемого положения. Кроме того, каждое из отверстий 304 можно слегка радиально удлинить таким образом, чтобы они могли надлежащим образом принимать штифты 308, в кольцевой ориентации. Это позволяет штифтам 308 радиально скользить внутри отверстий 334, 334' и допускать некоторое осевое отсутствие выравнивания между инструментом 100 и держателем инструмента 330, сводя к минимуму любое угловое смещение и зазор между приводным и ведомым элементами. Отверстия 334 на стороне инструмента 314 могут быть смещены приблизительно на 90 градусов от отверстий 334' (показаны пунктирными линиями) на стороне держателя 316, как лучше всего показано на ФИГ. 14.
В варианте осуществления, показанном на ФИГ. 11-15, совокупность соединительных контактных штифтов 340, размещенных на стороне держателя 316 адаптера 310 и на стороне инструмента 314 адаптера 310, включает пазы 342 (ФИГ. 14) для введения совокупности штифтов (не показана) из монтажной части для инструмента 300. Наряду с передачей электрических сигналов между хирургическим инструментом 100 и держателем инструмента 330, по меньшей мере некоторые из данных электрических соединений могут быть соединены с устройством памяти адаптера 344 (ФИГ. 13) печатной платой адаптера 310.
В варианте осуществления, представленном на ФИГ. 11-15, используется отсоединяемая конфигурация фиксатора 346 для разъемного прикрепления адаптера 310 к держателю инструмента 330. При использовании в настоящем документе термин «узел привода инструмента» в контексте роботизированной системы 10 относится по меньшей мере к адаптеру 310 и держателю инструмента 330, которые в совокупности по существу обозначены элементом 110 на ФИГ. 11. Как показано на ФИГ. 11, держатель инструмента 330 включает конфигурацию первого фиксирующего штифта 337, размер которого позволяет ему приниматься в соответствующие пазы захватных скоб 311, находящихся в адаптере 310. Кроме того, держатель инструмента 330 дополнительно содержит вторые защелкивающиеся штифты 338, размер которых позволяет им удерживаться в соответствующих пазах захватных скоб 313 в адаптере 310. См. ФИГ. 11. Узел фиксатора 315 поддерживается с возможностью перемещения на адаптере 310 и имеет пару захватных скоб 317, образованных в нем, которые могут смещаться из первого защелкнутого положения, в котором защелкивающиеся штифты 338 удерживаются в соответствующих захватных скобах 313, в незащелкнутое положение, в котором захваты 317 выровнены со скобами 313, что позволяет вставить или извлечь вторые защелкивающиеся штифты 338 в захватные скобы 313 или из них. Для смещения узла фиксатора в защелкнутое положение используют пружину или пружины (не показаны). Выступ на стороне инструмента 314 адаптера 310 предусматривает скользящее введение латерально направленных язычков на корпусе для монтажа инструмента (не показано).
Как показано на ФИГ. 5 и 16-21, монтажная часть для инструмента 300 служит функциональной поддержкой для множества приводных систем для генерирования различных форм управляющих движений, необходимых для работы конкретного типа концевого эффектора, соединенного с дистальным концом узла удлиненного стержня 200. Как показано на ФИГ. 5 и 16-21, монтажная часть для инструмента 300 содержит первую приводную систему, по существу обозначенную элементом 350, которая выполнена с возможностью приема соответствующего «первого» поворотного выходного движения от узла привода инструмента 110 роботизированной системы 10 и преобразования данного первого поворотного выходного движения в первое поворотное управляющее движение, сообщаемое хирургическому концевому эффектору. В показанном варианте осуществления первое поворотное управляющее движение применяется для поворота узла удлиненного стержня 200 (и хирургического концевого эффектора 3000) вокруг продольной оси инструмента LT-LT.
В варианте осуществления, показанном на ФИГ. 5 и 16-18, первая приводная система 350 включает сегмент трубчатой шестерни 354, сформированный (или прикрепленный) на проксимальном конце 208 проксимального сегмента трубки 202 узла удлиненного стержня 200. Проксимальный конец 208 проксимального сегмента трубки 202 поддерживается с возможностью поворота на монтажной пластине для инструмента 304 монтажной части для инструмента 300 при помощи переднего опорного кармана 352, установленного на монтажной пластине для инструмента 304. См. ФИГ. 16. Сегмент трубчатой шестерни 354 поддерживается в зубчатом зацеплении с узлом первой поворотной шестерни 360, функционально поддерживаемой на монтажной пластине для инструмента 304. Как показано на ФИГ. 16, узел поворотной шестерни 360 содержит первую поворотную приводную шестерню 362, соединенную с соответствующим первым из ведомых дисков или элементов 306 на стороне держателя 316 монтажной пластины для инструмента 304, когда монтажная часть для инструмента 300 соединена с узлом привода инструмента 110. См. ФИГ. 15. Узел поворотной шестерни 360 дополнительно содержит первую поворотную ведомую шестерню 364, которая поддерживается с возможностью поворота на монтажной пластине для инструмента 304. Первая поворотная ведомая шестерня 364 находится в зубчатом зацеплении со второй поворотной ведомой шестерней 366, которая, в свою очередь, находится в зубчатом зацеплении с сегментом трубчатой шестерни 354. Сообщение первого поворотного выходного движения от узла привода инструмента 110 роботизированной системы 10 соответствующему ведомому элементу 306 вызывает поворот поворотной приводной шестерни 362. Поворот поворотной приводной шестерни 362 в конечном итоге приведет к повороту узла удлиненного стержня 200 (и хирургического концевого эффектора 3000) вокруг продольной оси инструмента LT-LT (показано стрелкой R на ФИГ. 5). Следует понимать, что сообщение поворотного выходного движения от узла привода инструмента 110 в одном направлении приведет к повороту узла удлиненного стержня 200 и хирургического концевого эффектора 3000 вокруг продольной оси инструмента LT-LT в первом направлении поворота, а сообщение поворотного выходного движения в противоположном направлении приведет к повороту узла удлиненного стержня 200 и хирургического концевого эффектора 3000 во втором направлении поворота, противоположном первому направлению поворота.
В варианте осуществления, показанном на ФИГ. 5 и 16-21, монтажная часть для инструмента 300 дополнительно включает вторую приводную систему, по существу обозначенную элементом 370, которая выполнена с возможностью приема соответствующего «второго» поворотного выходного движения от узла привода инструмента 110 роботизированной системы 10, и преобразования данного второго поворотного выходного движения во второе поворотное управляющее движение, сообщаемое хирургическому концевому эффектору. Вторая приводная система 370 включает вторую поворотную приводную шестерню 372, соединенную с соответствующим вторым из ведомых дисков или элементов 306 на стороне держателя 316 на монтажной пластине для инструмента 304, когда монтажная часть для инструмента 300 соединена с узлом привода инструмента 110. См. ФИГ. 15. Вторая приводная система 370 дополнительно содержит первую поворотную ведомую шестерню 374, которая поддерживается с возможностью поворота на монтажной пластине для инструмента 304. Первая поворотная ведомая шестерня 374 находится в зубчатом зацеплении с шестерней стержня 376, установленной на проксимальном сегменте приводного стержня 380 с возможностью перемещения, но без возможности поворота. В показанном варианте осуществления шестерня стержня 376 установлена без возможности поворота на проксимальном сегменте приводного стержня 380 при помощи ряда осевых шпоночных пазов 384, которые позволяют шестерне стержня 376 перемещаться вдоль оси по проксимальному сегменту приводного стержня 380, когда она прикреплена к нему без возможности поворота. Поворот проксимального сегмента приводного стержня 380 приводит к передаче второго поворотного управляющего движения на хирургический концевой эффектор 3000.
Вторая приводная система 370 в варианте осуществления, показанном на ФИГ. 5 и 16-21, включает сдвигающую систему 390 для избирательного осевого смещения проксимального сегмента приводного стержня 380, которая переводит шестерню стержня 376 в зубчатое зацепление с первой поворотной ведомой шестерней 374 и из него. Например, как показано на ФИГ. 16-18, проксимальный сегмент приводного стержня 380 поддерживается во втором опорном кармане 382, прикрепленном к монтажной пластине для инструмента 304, таким образом, что проксимальный сегмент приводного стержня 380 способен перемещаться по оси и поворачиваться относительно второго опорного кармана 382. По меньшей мере в одной форме сдвигающая система 390 дополнительно включает направляющую траверсу сдвигателя 392, поддерживаемую с возможностью скольжения на монтажной пластине для инструмента 304. Проксимальный сегмент приводного стержня 380 поддерживается в направляющей траверсе сдвигателя 392 и имеет на себе пару колец 386, расположенных таким образом, чтобы смещение направляющей траверсы сдвигателя 392 на монтажной пластине для инструмента 304 приводило к осевому перемещению проксимального сегмента приводного стержня 380. По меньшей мере в одной форме сдвигающая система 390 дополнительно включает соленоид сдвигателя 394, функционально взаимодействующий с направляющей траверсой сдвигателя 392. Соленоид сдвигателя 394 принимает управляющее питание от роботизированного контроллера 12 таким образом, чтобы при активации соленоида сдвигателя 394 направляющая траверса сдвигателя 392 перемещалась в дистальном направлении DD.
В показанном варианте осуществления пружина стержня 396 установлена на проксимальном сегменте приводного стержня 380 между шестерней стержня 376 и вторым опорным карманом 382 с целью смещения шестерни стержня 376 в проксимальном направлении PD и введения ее в зубчатое зацепление с первой поворотной ведомой шестерней 374. См. ФИГ. 16, 18 и 19. Поворот второй поворотной приводной шестерни 372 в ответ на поворотные выходные движения, генерируемые роботизированной системой 10, в конечном итоге приводит к повороту проксимального сегмента приводного стержня 380 и других связанных с ним компонентов приводного стержня (узел приводного стержня 388) вокруг продольной оси LT-LT. Следует понимать, что сообщение поворотного выходного движения от узла привода инструмента 110 в одном направлении приведет к повороту проксимального сегмента приводного стержня 380 и в конечном счете других связанных с ним компонентов в первом направлении, а сообщение поворотного выходного движения в противоположном направлении приведет к повороту проксимального сегмента приводного стержня 380 во втором направлении, противоположном первому направлению. Когда необходимо сместить проксимальный сегмент приводного стержня 380 в дистальном направлении DD, как более подробно описано ниже, роботизированный контроллер 12 активизирует соленоид сдвигателя 390, смещая направляющую траверсу сдвигателя 392 в дистальном направлении DD. В некоторых вариантах осуществления соленоид сдвигателя 390 может быть способен смещать проксимальный сегмент приводного стержня 380 между более чем двумя продольными положениями. Например, в некоторых вариантах осуществления, таких как описанные в настоящем документе применительно к ФИГ. 83-96, можно использовать поворотный приводной стержень (например, соединенный с проксимальным сегментом приводного стержня 380) в более чем двух продольных положениях.
На ФИГ. 22-23 представлен другой вариант осуществления, в котором используются те же компоненты, что и в варианте осуществления, показанном на ФИГ. 5 и 16-21, за исключением того, что в данном варианте используется питающийся от аккумуляторной батареи приводной двигатель 400, подающий поворотные движения на проксимальный сегмент приводного стержня 380. Такая конфигурация позволяет монтажной части для инструмента генерировать более сильные поворотные выходные движения и крутящий момент, что может быть благоприятным решением при использовании разных форм концевых эффекторов. Как показано на данных фигурах, двигатель 400 прикреплен к монтажной пластине инструмента 304 при помощи опорной конструкции 402 таким образом, чтобы ведущая шестерня 404, соединенная с двигателем400, удерживалась в зубчатом зацеплении с шестерней стержня 376. В варианте осуществления, показанном на ФИГ. 22-23, опорная конструкция 402 выполнена с возможностью съемного зацепления с фиксирующими прорезями 303, образованными в монтажной пластине для инструмента 304, которые выполнены с возможностью упрощения прикрепления корпусного элемента (не показан) к монтажной пластине 304, если двигатель 400 не используется. Таким образом, чтобы использовать двигатель 400, врач снимает корпус с монтажной пластины для инструмента 304 и вставляет ножки 403 опорной конструкции в фиксирующие прорези 303 в монтажной пластине для инструмента 304. Проксимальный сегмент приводного стержня 380 и другие связанные с ним компоненты приводного стержня поворачиваются вокруг продольной оси LT-LT посредством подачи питания на двигатель 400. Как показано на фигуре, двигатель 400 получает питание от аккумуляторной батареи. Однако в такой конфигурации двигатель 400 взаимодействует с роботизированным контроллером 12 таким образом, чтобы роботизированная система 10 управляла активацией двигателя 400. В альтернативных вариантах осуществления двигатель 400 активируется вручную переключателем (не показан), установленным на самом двигателе 400 или на монтажной части для инструмента 300. В других вариантах осуществления двигатель 400 может принимать питание и сигналы управления от роботизированной системы.
Вариант осуществления, показанный на ФИГ. 5 и 16-21, включает активируемую вручную реверсирующую систему, по существу обозначенную элементом 410, для ручного сообщения обратного поворотного движения проксимальному сегменту приводного стержня 380 в том случае, если двигатель выйдет из строя или произойдет сбой или утрата питания роботизированной системы. Такая активируемая вручную реверсирующая система 410 может быть особенно подходящим решением, например, если узел приводного стержня 388 окажется зажатым или иным способом заблокированным таким образом, что поворот компонентов приводного стержня в обратном направлении только под воздействием двигателя станет невозможен. В показанном варианте осуществления механически активируемая реверсирующая система 410 включает узел приводных шестерен 412, способный к избирательному зацеплению со второй поворотной ведомой шестерней 376 и к ручной активации с сообщением реверсирующего поворотного движения проксимальному сегменту приводного стержня 380. Узел приводных шестерен 412 включает реверсирующую шестерню 414, которая установлена с возможностью перемещения на монтажной пластине для инструмента 304. Реверсирующая шестерня 414 установлена на поворотном стержне 416, установленном с возможностью перемещения на монтажной пластине для инструмента 304 через паз 418. См. ФИГ. 17. В варианте осуществления, показанном на ФИГ. 5 и 16-21, активируемая вручную реверсирующая система 410 дополнительно включает активируемую вручную приводную шестерню 420, которая включает корпусную часть 422, которая имеет дугообразный сегмент шестерни 424, образованный на ней. Корпусная часть 422 шарнирно соединена с монтажной пластиной для инструмента 304 для избирательного поворотного движения вокруг оси активатора A-A (ФИГ. 16), по существу перпендикулярной монтажной пластине для инструмента 304.
На ФИГ. 16-19 представлена активируемая вручную реверсирующая система 410 в первом неактивированном положении. В одном примере формы на корпусной части 422 образована или иным образом прикреплена часть рукоятки активатора 426. Часть рукоятки 426 активатора имеет такой размер относительно монтажной пластины для инструмента 304, чтобы между частью рукоятки 426 и монтажной пластиной для инструмента 304 возникало небольшое взаимодействие, удерживающее часть рукоятки 426 в первом неактивированном положении. Однако когда врачу необходимо вручную активировать узел приводных шестерен 412, он может легко преодолеть это сопротивление, сообщив поворотное движение части рукоятки 426. Как показано на ФИГ. 16-19, когда узел приводных шестерен 412 находится в первом неактивированном положении, дугообразный сегмент шестерни 424 выведен из зубчатого зацепления с реверсирующей шестерней 414. Когда врачу необходимо сообщить обратное поворотное движение проксимальному сегменту приводного стержня 380, он начинает сообщать поворотное одностороннее движение приводной шестерне 420. Когда приводная шестерня 420 начинает поворачиваться вокруг оси активации A-A, часть ее основной части 422 входит в контакт с частью реверсирующей шестерни 414 и перемещает реверсирующую шестерню 414 по оси в дистальном направлении DD, выводя приводную шестерню стержня 376 из зубчатого зацепления с первой поворотной ведомой шестерней 374 второй приводной системы 370. См. ФИГ. 20. При повороте приводной шестерни 420 дугообразный сегмент шестерни 424 зубчатым образом зацепляет реверсирующую шестерню 414. Продолжающееся одностороннее движение приводной шестерни 420 приводит к сообщению обратного поворотного движения приводной шестерне стержня 376 и в конечном счете проксимальному сегменту приводного стержня 380. Врач может продолжать одностороннее движение узла приводных шестерен 412 столько, сколько это необходимо для полного освобождения или обратного движения связанного(-ых) с ним компонента(-ов) концевого эффектора. После того как желаемое количество обратного поворотного движения было сообщено проксимальному сегменту приводного стержня 380, врач возвращает приводную шестерню 420 в исходное или неактивированное положение, в котором дугообразный сегмент шестерни 416 выведен из зубчатого зацепления с приводной шестерней стержня 376. В данном положении пружина стержня 396 снова смещает шестерню стержня 376 в зубчатое зацепление с первой поворотной ведомой шестерней 374 второй приводной системы 370.
В процессе применения врач может подавать управляющие команды на контроллер или блок управления роботизированной системы 10, которая «роботизированно генерирует» выходные движения, которые в конечном итоге передаются на различные компоненты второй приводной системы 370. В настоящем документе термины «роботизированно генерирует» или «роботизированно сгенерированный» обозначают создание движений путем подачи питания и сигналов управления на двигатели роботизированной системы и другие приводные компоненты с электропитанием. Данный термин отличается от термина «активируемый вручную», который обозначает действия, предпринимаемые врачом, приводящие к созданию управляющих движений, независимых от движений, создаваемых работающими двигателями роботизированной системы. Сообщение роботизированно сгенерированных управляющих движений второй приводной системе в первом направлении приводит к сообщению первого поворотного приводного движения узлу приводного стержня 388. Когда узел приводного стержня 388 поворачивается в первом направлении поворота, подвижный по оси элемент 3016 приводится в движение в дистальном направлении DD из его исходного положения к его конечному положению в концевом эффекторе 3000, например, как описано в настоящем документе применительно к ФИГ. 64-96. Сообщение роботизированно сгенерированных управляющих движений второй приводной системе во втором направлении приводит к сообщению второго поворотного приводного движения узлу приводного стержня 388. Когда узел приводного стержня 388 поворачивается во втором направлении поворота, подвижный по оси элемент 3016 приводится в движение в проксимальном направлении PD из конечного положения к исходному положению в концевом эффекторе 3000. Когда врачу необходимо вручную сообщить поворотное управляющее движение узлу приводного стержня 388, узел приводного стержня 388 поворачивают во втором направлении поворота, в результате чего пусковой элемент (например, поступательно перемещаемый по оси элемент 3016) перемещается в проксимальном направлении PD в концевом эффекторе. Другие варианты осуществления, содержащие те же компоненты, выполнены таким образом, чтобы ручное сообщение поворотного управляющего движения узлу приводного стержня могло воздействовать на узел приводного стержня так, чтобы он поворачивался в первом направлении поворота, и это можно использовать для того, чтобы помочь роботизированно сгенерированным управляющим движениям продвинуть подвижный по оси элемент 3016 в дистальном направлении.
Узел приводного стержня, который используется для пуска, закрытия и поворота концевого эффектора, можно активировать и смещать вручную, что позволяет освободить и извлечь концевой эффектор из операционного поля, а также из брюшной полости даже в случае отказа двигателя(-лей), перебоев питания роботизированной системы и прочих отказов электроники. Активация части рукоятки 426 приводит к ручному созданию активирующих или управляющих усилий, которые прилагаются к узлу приводного стержня 388’ при помощи различных компонентов активируемой вручную реверсирующей системы 410. Если часть рукоятки 426 находится в неактивированном положении, она смещается из активируемого зацепления с реверсирующей шестерней 414. Когда часть рукоятки 426 начинают активировать, она снова смещается в активируемое зацепление. Рукоятка 426 выполнена с возможностью повторения активации столько раз, сколько необходимо для полного освобождения подвижного по оси элемента 3016 и концевого эффектора 3000.
Как показано на ФИГ. 5 и 16-21, монтажная часть для инструмента 300 включает третью приводную систему 430, которая выполнена с возможностью приема соответствующего «третьего» поворотного выходного движения от узла привода инструмента 110 роботизированной системы 10 и преобразования данного третьего поворотного выходного движения в третье поворотное управляющее движение. Третья приводная система 430 включает шкив третьего привода 432, соединенный с соответствующим третьим из ведомых дисков или элементов 306 на стороне держателя 316 на монтажной пластине для инструмента 304, когда монтажная часть для инструмента 300 соединена с узлом привода инструмента 110. См. ФИГ. 15. Шкив третьего привода 432 выполнен с возможностью сообщения третьего поворотного управляющего движения (в ответ на соответствующие поворотные выходные движения, сообщенные ему роботизированной системой 10) соответствующему кабелю третьего привода 434, который можно использовать для сообщения различных управляющих или манипуляционных движений концевому эффектору, функционально соединенному с узлом стержня 200. Как преимущественно показано на ФИГ. 16-17, кабель третьего привода 434 охватывает шпиндельный узел третьего привода 436. Шпиндельный узел третьего привода 436 шарнирно установлен на монтажной пластине для инструмента 304, и между шпиндельным узлом третьего привода 436 и монтажной пластиной для инструмента 304 установлена третья натяжная пружина 438, чтобы сохранялся требуемый уровень натяжения кабеля третьего привода 434. Как показано на фигурах, торцевая часть 434A кабеля третьего привода 434 проходит вокруг верхней части сложного блока 440, прикрепленного к монтажной пластине для инструмента 304, а торцевая часть кабеля 434B проходит вокруг шпули или стойки 442 сложного блока 440. Следует понимать, что сообщение третьего поворотного выходного движения от узла привода инструмента 110 в одном направлении вызовет поворот шкива третьего привода 432 в первом направлении, в результате чего торцевые части кабеля 434A и 434B будут перемещаться в противоположных направлениях, сообщая управляющие движения концевому эффектору 3000 или узлу удлиненного стержня 200, как более подробно описано ниже. Таким образом, при повороте шкива третьего привода 432 в первом направлении поворота торцевая часть кабеля 434A перемещается в дистальном направлении DD, а торцевая часть кабеля 434B перемещается в проксимальном направлении PD. При повороте шкива третьего привода 432 в противоположном направлении поворота торцевая часть кабеля 434A перемещается в проксимальном направлении PD, а торцевая часть кабеля 434B перемещается в дистальном направлении DD.
Монтажная часть для инструмента 300, показанная на ФИГ. 5 и 16-21, включает четвертую приводную систему 450, которая выполнена с возможностью приема соответствующего «четвертого» поворотного выходного движения от узла привода инструмента 110 роботизированной системы 10 и преобразования данного четвертого поворотного выходного движения в четвертое поворотное управляющее движение. Четвертая приводная система 450 содержит шкив четвертого привода 452, соединенный с соответствующим четвертым из ведомых дисков, или элементов 306, на стороне держателя 316 на монтажной пластине для инструмента 304, монтажная часть для инструмента 300 соединена с узлом привода инструмента 110. См. ФИГ. 15. Шкив четвертого привода 452 выполнен с возможностью сообщения четвертого поворотного управляющего движения (в ответ на соответствующие поворотные выходные движения, сообщенные ему роботизированной системой 10) соответствующему кабелю четвертого привода 454, который можно использовать для сообщения различных управляющих или манипуляционных движений концевому эффектору, функционально соединенному с узлом стержня 200. Как преимущественно показано на ФИГ. 16-17, кабель четвертого привода 454 проходит вокруг шпиндельного узла четвертого привода 456. Шпиндельный узел четвертого привода 456 шарнирно установлен на монтажной пластине для инструмента 304, и между узлом шпинделя четвертого привода 456 и монтажной пластиной для инструмента 304 установлена четвертая натяжная пружина 458, чтобы сохранялся требуемый уровень натяжения кабеля четвертого привода 454. Торцевая часть 454A кабеля четвертого привода 454 проходит вокруг нижней части сложного блока 440, прикрепленного к монтажной пластине для инструмента 304, а торцевая часть кабеля 454B проходит вокруг шпули или четвертой стойки 462 сложного блока 440. Следует понимать, что сообщение поворотного выходного движения от узла привода инструмента 110 в одном направлении приведет к повороту шкива четвертого привода 452 в первом направлении, в результате чего торцевые части кабеля 454A и 454B будут перемещаться в противоположных направлениях, сообщая управляющие движения концевому эффектору или узлу удлиненного стержня 200, как более подробно описано ниже. Таким образом, при повороте шкива четвертого привода 434 в первом направлении поворота торцевая часть кабеля 454A перемещается в дистальном направлении DD, а торцевая часть кабеля 454B перемещается в проксимальном направлении PD. При повороте шкива четвертого привода 452 в противоположном направлении поворота торцевая часть кабеля 454A перемещается в проксимальном направлении PD, а торцевая часть кабеля 454B перемещается в дистальном направлении DD.
Хирургический инструмент 100, показанный на ФИГ. 5-6, включает шарнирное сочленение 3500. В таком варианте осуществления третья приводная система 430 может также называться «первой системой привода шарнира», а четвертая приводная система 450 может называться «второй системой привода шарнира». Аналогично кабель третьего привода 434 может называться «первым проксимальным кабелем шарнира», а кабель четвертого привода 454 может называться «вторым проксимальным кабелем шарнира».
Монтажная часть для инструмента 300 варианта осуществления, показанного на ФИГ. 5 и 16-21, включает пятую приводную систему, по существу обозначенную элементом 470, которая выполнена с возможностью осевого перемещения узла приводного штока 490. Узел приводного штока 490 включает проксимальный сегмент приводного штока 492, проходящий через проксимальный сегмент приводного стержня 380, и узел приводного стержня 388. См. ФИГ. 18. Пятая приводная система 470 включает приводную направляющую траверсу с возможностью перемещения 472, которая поддерживается с возможностью скольжения на монтажной пластине для инструмента 304. Проксимальный сегмент приводного штока 492 поддерживается в приводной направляющей траверсе 372 и имеет на себе пару шаровых ограничителей 394, расположенных таким образом, чтобы смещение приводной направляющей траверсы 372 на монтажной пластине для инструмента 304 приводило к осевому перемещению проксимального сегмента приводного штока 492. По меньшей мере в одном примере формы пятая приводная система 370 дополнительно включает приводной соленоид 474, функционально взаимодействующий с приводной направляющей траверсой 472. Приводной соленоид 474 принимает управляющее питание от роботизированного контроллера 12. В результате активации приводного соленоида 474 в первом направлении узел приводного штока 490 будет перемещаться в дистальном направлении DD, а в результате активации приводного соленоида 474 во втором направлении узел приводного штока 490 будет перемещаться в проксимальном направлении PD. Как показано на ФИГ. 5, концевой эффектор 3000 включает элементы бранши, выполненные с возможностью перемещения между открытым и закрытым положениями при сообщении осевых закрывающих движений закрывающей системе. В варианте осуществления, представленном на ФИГ. 5 и 16-21, пятая приводная система 470 используется для генерирования таких закрывающих движений. Таким образом, пятая приводная система 470 также может называться «закрывающим шкивом».
Хирургический инструмент 100, показанный на ФИГ. 5 и 16-21, включает шарнирное сочленение 3500, которое, действуя совместно с третьей и четвертой приводными системами 430, 450 соответственно, шарнирно поворачивает концевой эффектор 3000 вокруг продольной оси инструмента LT. Шарнирное сочленение 3500 включает проксимальную гнездовую трубку 3502, прикрепленную к дистальному концу 233 дистальной части внешней трубки 231 и образующую в ней проксимальное шаровое гнездо 3504. См. ФИГ. 24. Внутри проксимального шарового гнезда 3504 подвижно размещен проксимальный шаровой элемент 3506. Как показано на ФИГ.24, проксимальный шаровой элемент 3506 имеет центральный канал для привода 3508, позволяющий дистальному сегменту приводного стержня 3740 проходить через него. Кроме того, проксимальный шаровой элемент 3506 имеет в себе четыре шарнирных канала 3510, способствующие прохождению через них дистальных сегментов кабелей 444, 445, 446, 447. В различных вариантах осуществления дистальные сегменты кабелей 444, 445, 446, 447 могут быть напрямую или опосредованно соединены с проксимальными торцевыми частями кабелей 434A, 434B, 454A, 454B соответственно, например, как показано на ФИГ. 24A. Как дополнительно показано на ФИГ. 24, шарнирное сочленение 3500 дополнительно включает сегмент промежуточной шарнирной трубки 3512, в которой образовано промежуточное шаровое гнездо 3514. Промежуточное шаровое гнездо 3514 выполнено с возможностью подвижного поддержания в нем шара 3522 концевого эффектора, образованного на соединительной трубке концевого эффектора 3520. Дистальные сегменты кабелей 444, 445, 446, 447 проходят через каналы для кабелей 3524 в шаровом элементе 3522 концевого эффектора и прикрепляются к нему утолщениями 3526, которые принимают соответствующие каналы 3528 в шаре 3522 концевого эффектора. Можно использовать и другие конфигурации прикрепления дистальных сегментов кабелей 444, 445, 446, 447 к шару 3522 концевого эффектора.
На ФИГ. 25 и 26 представлен новый и уникальный поворотный опорно-соединительный узел, по существу обозначенный элементом 3540. Показанный поворотный опорно-соединительный узел 3540 включает соединительную часть 4012 корпуса привода концевого эффектора 4010, которая имеет по существу цилиндрическую форму. По периметру цилиндрической соединительной части 4012 образована первая кольцеобразная канавка 4014. Поворотный опорно-соединительный узел 3540 дополнительно содержит дистальную гнездовую часть 3530, образованную в соединительной трубке концевого эффектора 3520, как показано на ФИГ. 25 и 26. Дистальная гнездовая часть 3530 имеет такой размер относительно цилиндрической соединительной части 4012, что соединительная часть 4012 может свободно поворачиваться внутри гнездовой части 3530. Во внутренней стенке 3531 дистальной гнездовой части 3530 образована вторая кольцеобразная канавка 3532. В дистальной гнездовой части 3530 предусмотрено окошко 3533, сообщающееся в ней со второй кольцеобразной канавкой 3532. Как показано на ФИГ. 25 и 26, поворотный опорно-соединительный узел 3540 дополнительно включает кольцеобразный подшипник 3534. В различных примерах осуществления кольцеобразный подшипник 3534 представляет собой способное к пластической деформации по существу круглое кольцо, имеющее в себе вырез 3535. Вырез формирует свободные концы 3536, 3537 в кольцеобразном подшипнике 3534. Как показано на ФИГ. 25, кольцеобразный подшипник 3534 имеет в своем естественном, недеформированном состоянии по существу кольцевую форму.
Чтобы соединить хирургический концевой эффектор 3000 (например, первую часть хирургического инструмента) с шарнирным сочленением 3500 (например, второй частью хирургического инструмента), цилиндрическую соединительную часть 4012 вставляют в дистальную гнездовую часть 3530, приводя вторую кольцеобразную канавку 3532 по существу в совмещение с первой кольцеобразной канавкой 4014. Затем один из свободных концов 3536, 3537 кольцеобразного подшипника вставляют в совмещенные кольцеобразные канавки 4014, 3532 через окошко 3533 в дистальной гнездовой части 3530 соединительной трубки концевого эффектора 3520. Для обеспечения простоты вставки окошко или отверстие 3533 имеет сужающуюся поверхность 3538, образованную на нем. См. ФИГ. 25. Кольцеобразный подшипник 3534 по существу поворачивают на место, и поскольку он стремится к формированию круга или кольца, после установки он не будет стремиться выйти через окошко 3533. После вставки кольцеобразного подшипника 3534 в совмещенные кольцеобразные канавки 4014, 3532 соединительная трубка концевого эффектора 3520 будет присоединена с возможностью поворота к соединительной части 4012 корпуса привода концевого эффектора 4010. Такая конфигурация дает корпусу привода концевого эффектора 4010 возможность поворачиваться вокруг продольной оси инструмента LT-LT относительно соединительной трубки концевого эффектора 3520. Кольцеобразный подшипник 3534 становится рабочей поверхностью, на которой затем будет поворачиваться корпус привода концевого эффектора 4010. Любая боковая нагрузка будет стремиться деформировать кольцеобразный подшипник 3534, который поддерживается и находится внутри двух соединенных друг с другом канавок 4014, 3532, предотвращающих повреждение кольцеобразного подшипника 3534. Будет очевидно, что такой простой и эффективный соединительный узел, содержащий кольцеобразный подшипник 3534, образует очень гладкий стыковочный элемент между поворачиваемыми частями 4010, 3530. Если в течение сборки один из свободных концов 3536, 3537 выйдет из окошка 3533 (см., например, ФИГ. 26), то поворотный опорно-соединительный узел 3540 можно разобрать, вытащив кольцеобразный подшипник 3532 наружу через окошко 3533. Поворотный опорно-соединительный узел 3540 предусматривает легкую сборку и производство, а также обеспечивает хорошую поддержку концевому эффектору и позволяет проводить с ним поворотные манипуляционные движения.
Шарнирное сочленение 3500 обеспечивает шарнирный поворот концевого эффектора 3000 вокруг продольной оси инструмента LT. Например, если необходимо шарнирно повернуть концевой эффектор 3000 в первом направлении FD, как показано на ФИГ. 5, роботизированная система 10 может активировать третью приводную систему 430, так чтобы шпиндельный узел третьего привода 436 (ФИГ. 16-18) поворачивался в первом направлении, тем самым перемещая проксимальную торцевую часть кабеля 434A и в конечном счете дистальный сегмент кабеля 444 в проксимальном направлении PD, а также ослабляя проксимальную торцевую часть кабеля 434B и дистальный сегмент кабеля 445, в результате чего шар 3522 концевого эффектора поворачивается внутри гнезда 3514. Аналогично, чтобы шарнирно повернуть концевой эффектор 3000 во втором направлении SD, противоположном первому направлению FD, роботизированная система 10 может активировать третью приводную систему 430, так чтобы шпиндельный узел третьего привода 436 поворачивался во втором направлении, тем самым перемещая проксимальную торцевую часть кабеля 434В и в конечном счете дистальный сегмент кабеля 445 в проксимальном направлении PD и ослабляя проксимальную торцевую часть кабеля 434А и дистальный сегмент кабеля 444, в результате чего шар 3522 концевого эффектора поворачивается внутри гнезда 3514. Если необходимо повернуть концевой эффектор 3000 в третьем направлении TD, как показано на ФИГ. 5, роботизированная система 10 может активировать четвертую приводную систему 450, так чтобы шпиндельный узел четвертого привода 456 поворачивался в третьем направлении, таким образом перемещая проксимальную торцевую часть кабеля 454A и в конечном счете дистальный сегмент кабеля 446 в проксимальном направлении PD, и ослабляя проксимальную торцевую часть кабеля 454B и дистальный сегмент кабеля 447, в результате чего шар 3522 концевого эффектора поворачивается внутри гнезда 3514. Аналогично, чтобы шарнирно повернуть концевой эффектор 3000 в четвертом направлении FTH, противоположном третьему направлению TD, роботизированная система 10 может активировать четвертую приводную систему 450, так чтобы шпиндельный узел четвертого привода 456 поворачивался в четвертом направлении, таким образом перемещая проксимальную торцевую часть кабеля 454В и в конечном счете дистальный сегмент кабеля 447 в проксимальном направлении PD, и ослабляя проксимальную торцевую часть кабеля 454А и дистальный сегмент кабеля 446, в результате чего шар 3522 концевого эффектора поворачивается внутри гнезда 3514.
В варианте осуществления, показанном на ФИГ. 5 и 16-21, применяются поворотные и продольные движения, которые в целях активации передаются от монтажной части для инструмента 300 через узел удлиненного стержня. Узел приводного стержня, использованный для передачи таких поворотных и продольных движений (например, крутящих, натягивающих и сжимающих движений) к концевому эффектору, является относительно гибким, чтобы обеспечивать поворот концевого эффектора вокруг шарнирного сочленения. На ФИГ. 27-28 представлен альтернативный узел приводного стержня 3600, который можно использовать в сочетании с вариантом осуществления, показанным на ФИГ. 5 и 16-21, или с другими вариантами осуществления. В варианте осуществления, представленном на ФИГ.5, проксимальный сегмент приводного стержня 380 представляет собой сегмент узла приводного стержня 3600, а дистальный сегмент приводного стержня 3740 аналогичным образом представляет собой другой сегмент узла приводного стержня 3600. Узел приводного стержня 3600 включает приводную трубку 3602, имеющую ряд вырезанных в ней кольцевых соединительных сегментов 3604. В представленном варианте осуществления приводная трубка 3602 содержит дистальную часть проксимального сегмента приводного стержня 380. Например, узел стержня 3600, а также узлы стержня 3600', 3600'', описанные в настоящем документе применительно к ФИГ.27-45, могут являться компонентами и/или могут быть механические соединены с различными поворотными приводными стержнями, описанными в настоящем документе, включая, например, поворотные приводные стержни 680, 1270, 1382 и т.п.
Приводная трубка 3602 представляет собой полую металлическую трубку (из нержавеющей стали, титана и т.п.), содержащую ряд образованных в ней кольцевых соединительных сегментов 3604. Кольцевые соединительные сегменты 3604 содержат множество неплотно соединенных фигур типа «ласточкин хвост» 3606,
которые, например, вырезаны в приводной трубке 3602 лазером, а также служат для облегчения гибкого перемещения между соседними соединительными сегментами 3604. См. ФИГ. 28. Такая лазерная резка заготовки трубки позволяет получить гибкую полую приводную трубку, которую можно использовать при сжимании, натягивании и скручивании. В такой конфигурации используют полные диаметральные вырезы, которые соединяются со смежной частью в конфигурации, аналогичной частям пазла. Данные вырезы повторяются по длине полой трубки в ряд, иногда с поворотом для изменения характеристик натяжения или скручивания.
На ФИГ. 29-33 представлен альтернативный пример микрокольцевых соединительных сегментов 3604', содержащих в себе множество вырезанных лазером фигур 3606', приблизительно напоминающих неплотно соединенные противоположные Т-образные и T-образные формы с прорезью. Кольцевые соединительные сегменты 3604, 3604' по существу содержат множество микрошарнирных скручиваемых соединений. Таким образом, каждый соединительный сегмент 3604, 3604' может передавать крутящий момент, способствуя относительному шарнирному повороту между каждым кольцевым соединительным сегментом. Как показано на ФИГ. 29-30, соединительный сегмент 3604D' на дистальном конце 3603 приводной трубки 3602 содержит часть дистального опорного кольца 3608D, которое обеспечивает прикрепление к другим компонентам привода, активирующего концевой эффектор, или к частям соединения с возможностью быстрой разборки и т.п., а соединительный сегмент 3604P' на проксимальном конце 605 приводной трубки 3602 содержит часть проксимального опорного кольца 3608P', обеспечивающего прикрепление к другим проксимальным компонентам привода или к частям соединения с возможностью быстрой разборки.
Диапазон движений между стыками в каждом конкретном узле приводного стержня 3600 можно увеличить, увеличив расстояние между лазерными вырезами. Например, чтобы соединительные сегменты 3604' оставались соединенными друг с другом, и при этом существенно не снижалась способность приводной трубки к совершению желаемого диапазона движений, используют вторичный ограничительный элемент 3610. В варианте осуществления, показанном на ФИГ. 31-32, вторичный ограничительный элемент 3610 содержит пружину 3612 или иной спирально извитый элемент. В различных примерах осуществления дистальный конец 3614 пружины 3612 соответствует части дистального опорного кольца 3608D и имеет более тугую намотку, чем центральная часть 3616 пружины 3612. Аналогично проксимальный конец 618 пружины 3612 имеет более тугую намотку, чем центральная часть 3616 пружины 3612. В других вариантах осуществления ограничительный элемент 3610, установленный на приводную трубку 3602, имеет желаемый шаг, так что ограничительный элемент также функционирует, например, в качестве гибкой приводной резьбы для резьбового зацепления с другими резьбовыми управляющими компонентами на концевом эффекторе и/или на системе управления. Также следует понимать, что ограничительный элемент можно установить таким образом, чтобы он имел изменяемый шаг в целях передачи желаемых поворотных управляющих движений при повороте узла приводного стержня. Например, конфигурацию ограничительного элемента с изменяемым шагом можно использовать для усиления открывающих/закрывающих и пусковых движений, что будет более благоприятным решением, чем изменение числа линейных тактов при одном и том же поворотном движении. В других вариантах осуществления узел приводного стержня, например, содержит резьбу с изменяемым шагом на полом гибком приводном стержне, который можно толкать или тянуть в пределах 90 градусного изгиба. В других вариантах осуществления вторичный ограничительный элемент представляет собой эластомерную трубку или покрытие 3611, нанесенное на внешнюю поверхность или периметр приводной трубки 3602, как показано на ФИГ. 33А. Например, в другом варианте осуществления эластомерную трубку или покрытие 3611' вводят в полый канал 613, образованный внутри приводной трубки 3602, как показано на ФИГ. 33B.
Такие конфигурации приводного стержня представляют собой композитную скручивающуюся приводную ось, обеспечивающую прекрасную передачу нагрузки и желаемый диапазон осевых шарнирных поворотов. См., например, ФИГ. 33 и 33A-33B. Таким образом, данные композитные узлы приводного стержня обеспечивают широкий диапазон движения при сохранении способности к передаче крутящего момента в обоих направлениях, а также передачу натяжных и сжимающих управляющих движений через них. Кроме того, полый характер таких конфигураций приводного стержня позволяет проводить через них другие управляющие компоненты при обеспечении улучшенной нагрузки по натяжению. Например, некоторые другие варианты осуществления включают гибкий внутренний кабель, который проходит через узел приводного стержня, который помогает выровнять соединительные сегменты и обеспечить возможность сообщения натягивающих движений через узел приводного стержня. Более того, такие конфигурации приводного стержня относительно просты в производстве и сборке.
На ФИГ. 34-37 представлен сегмент 3620 узла приводного стержня 3600’. Данный вариант осуществления включает соединительные сегменты 3622, 3624, вырезанные лазером из материала заготовки трубки (например, нержавеющей стали, титана, полимера и т.п.). Соединительные сегменты 3622, 3624 остаются неплотно соединенными вместе, поскольку вырезы 3626 расположены радиально и несколько сужаются. Например, каждая из утолщенных частей 3628 имеет на внешнем периметре сужающуюся часть 3629, которую принимает гнездо 3630, имеющее сужающуюся часть на внутренней стенке. См., например, ФИГ. 35 и 37. Таким образом, для прикрепления соединительных сегментов 3622, 3624 не требуется никакой сборки. Как можно видеть на указанных фигурах, соединительный сегмент 3622 содержит противоположные поворотные утолщенные части 3628, которые вырезаны на обоих его концах и шарнирно принимаются в соответствующие гнезда 3630, образованные в смежных соединительных сегментах 3624.
На ФИГ. 34-37 представлен небольшой сегмент узла приводного стержня 3600'. Специалистам в данной области будет очевидно, что утолщения/гнезда могут быть вырезаны по всей длине узла приводного стержня. Таким образом, соединительные сегменты 3624 могут содержать вырезанные в них противоположные гнезда 3630, обеспечивающие создание рычажного механизма с соседними соединительными сегментами 3622 по длине узла приводного стержня 3600'. Кроме того, соединительные сегменты 3624 могут иметь наклоненную торцевую часть 3632, вырезанную в них для обеспечения шарнирного поворота соединительных сегментов 3624 относительно соединительных сегментов 3622, как показано на ФИГ.36-37. В представленном варианте осуществления каждое утолщение 3628 имеет ограничитель поворота 3634, выполненный с возможностью приведения в контакт с соответствующим ограничителем поворота 3636, образованном в соединительном сегменте 3622. См. ФИГ. 36-37. Другие варианты осуществления, во всем прочем идентичные сегменту 3620, не снабжены ограничителями поворота 3634 и ограничителями хода 3636.
Как указано выше, диапазон движений между соединениями в каждом конкретном узле приводного стержня можно увеличить, увеличив интервал между лазерными вырезами. В таких вариантах осуществления, чтобы соединительные сегменты 3622, 3624 оставались соединенными друг с другом, и при этом существенно не снижалась способность приводной трубки к совершению заданного диапазона движений, используют вторичный ограничительный элемент в форме эластомерной гильзы или покрытия 3640. В других вариантах осуществления можно использовать другие формы ограничительных элементов, описанных в настоящем документе, и эквивалентные им структуры. Как показано на ФИГ. 34, соединительные сегменты 3622, 3624 способны поворачиваться вокруг осей поворота PA-PA, образованных шарнирными утолщениями 3628 и соответствующими гнездами 3630. Для обеспечения расширенного диапазона шарнирного поворота узел приводного стержня 3600' можно поворачивать вокруг оси инструмента TL-TL при повороте вокруг осей шарниров PA-PA.
На ФИГ. 38-43 представлен сегмент 3640 другого узла приводного стержня 3600''. Узел приводного стержня 3600'' представляет собой многосегментную приводную систему, которая включает множество сцепленных соединительных сегментов 3642, образующих гибкую полую приводную трубку 3602''. Соединительный сегмент 3642 включает шаровую соединительную часть 3644 и гнездовую часть 3648. Каждый соединительный сегмент 3642 можно произвести, например, при помощи литьевого прессования из металла MIM из нержавеющей стали марок 17-4, 17-7, 420. Другие варианты осуществления можно произвести из нержавеющей стали марок 300 или 400, алюминия 6065 или 7071 или из титана. Другие варианты осуществления можно, например, отлить из пластика, содержащего или не содержащего наполнитель из нейлона, ультема, АБС пластика, поликарбоната или полиэтилена. Как показано на фигурах, шаровой соединитель 3644 имеет шестигранную форму. Таким образом, шаровой соединитель 3644 имеет шесть дугообразных поверхностей 3646, образованных на нем, и выполнен с возможностью принятия с возможностью поворота в имеющие соответствующую форму гнезда 3650. Каждое гнездо 3650 имеет шестигранную внешнюю часть 3652, образованную шестью плоскими поверхностями 3654, и внутреннюю часть 3656 радиальной формы. См. ФИГ. 41. Все соединительные сегменты 3642 имеют идентичную конструкцию, за исключением того, что гнездовые части последних соединительных сегментов, формирующих дистальный и проксимальный концы узла приводного стержня 3600, могут быть выполнены с возможностью функционального соединения с соответствующими управляющими компонентами. Каждый шаровой соединитель 3644 имеет в себе полый канал 3645, и они в совокупности образуют проход 3603 через полую гибкую приводную трубку 3602''.
Как показано на ФИГ. 42 и 43, сцепленные соединительные сегменты 3642 находятся внутри ограничительного элемента 3660, который представляет собой трубку или гильзу, произведенного, например, из гибкого полимерного материала. На ФИГ. 44 представлен гибкий внутренний элемент сердечник 3662, направленный через соединенные друг с другом соединительные сегменты 3642. Внутренний элемент сердечник 3662 представляет собой твердый элемент, произведенный из полимерного материала, или полую трубку или гильзу, произведенную из гибкого полимерного материала. На ФИГ. 45 представлен другой вариант осуществления, в котором используются как ограничительный элемент 3660, так и внутренний элемент сердечник 3662.
Узел приводного стержня 3600'' обеспечивает передачу поворотного и поступательного движения через шарнирное сочленение изменяемого радиуса. Полая структура узла приводного стержня 3600'' обеспечивает место для дополнительных управляющих компонентов или тянущего элемента (например, гибкого кабеля), обеспечивающих передачу натягивающих и сжимающих нагрузок. Однако в других вариантах осуществления соединительные сегменты 3624 не предусматривают наличие полого канала в узле приводного стержня. В таких вариантах осуществления, например, шаровая соединительная часть является сплошной. Поворотное движение поступательно перемещается посредством краев шестигранных поверхностей. Более жесткие допустимые отклонения могут обеспечивать передачу больших усилий. При использовании кабеля или иного натяжного элемента, проходящего через центральную линию узла приводного стержня 3600'', весь узел приводного стержня 3600'' можно поворачивать в изогнутом, продвинутом или втянутом виде без ограничений диапазона движений. Например, узел приводного стержня 3600'' может образовывать дугообразную приводную траекторию, прямую приводную траекторию, извитую приводную траекторию и т.п.
Хотя различные варианты осуществления, описанные в настоящем документе, выполнены с возможностью функционального взаимодействия и по меньшей мере частичной активации роботизированной системой, различные концевые эффекторы и компоненты удлиненного стержня, описанные в настоящем документе, можно эффективно применять и в сочетании с портативными инструментами. Например, на ФИГ. 46-47 представлен портативный хирургический инструмент 2400, в котором можно использовать различные компоненты и системы, описанные выше, для функциональной активации соединенного с ним электрохирургического концевого эффектора 3000. Следует понимать, что портативный хирургический инструмент 2400 может содержать и/или может быть электрически соединен с генератором, таким как генератор 3002, который генерирует электрохирургический управляющий сигнал, приводящий в действие концевой эффектор 300. В примере осуществления, представленном на ФИГ. 46-47, используется соединение с возможностью быстрой разборки 2210 для соединения концевого эффектора 3000 с узлом удлиненного стержня 2402. Например, соединение с возможностью быстрой разборки 2210 может предусматривать отделение концевого эффектора 3000 способом, описанным в настоящем документе применительно к ФИГ. 106-115. Для обеспечения шарнирного поворота концевого эффектора 3000 вокруг шарнирного сочленения 3500 проксимальная часть узла удлиненного стержня 2402 включает пример активируемого вручную привода шарнира 2410.
Как показано на ФИГ. 48-50, по меньшей мере в одном примере формы привод шарнира 2410 включает четыре подвижных по оси ползунка шарнира, которые подвижно установлены на проксимальном сегменте приводного стержня 380’ между проксимальным сегментом внешней трубки 2214 и проксимальным сегментом приводного стержня 380'. Например, сегмент кабеля шарнира 434A' прикреплен к первому ползунку шарнира 2420, содержащему выступающий из него первый шток активатора шарнира 2422. Сегмент кабеля шарнира 434B' прикреплен ко второму ползунку шарнира 2430, диаметрально противоположному первому ползунку шарнира 2420. Второй ползунок шарнира 2430 содержит второй выступающий из него шток активатора шарнира 2432. Сегмент кабеля шарнира 454A' прикреплен к третьему ползунку шарнира 2440, содержащему выступающий из него третий шток активатора шарнира 2442. Сегмент кабеля шарнира 454B' прикреплен к четвертому ползунку шарнира 2450, диаметрально противоположному третьему ползунку шарнира 2440. Четвертый шток активатора шарнира 2452 выступает из четвертого ползунка шарнира 2450. Штоки активатора шарнира 2422, 2432, 2442, 2452 обеспечивают сообщение узлом кольца шарнира 2460 движений по управлению шарниром ползункам шарнира 2420, 2430, 2440, 2450 соответственно.
Как показано на ФИГ. 48, штоки активатора шарнира 2422, 2432, 2442, 2452 подвижно проходят через монтажный шар 2470, установленный на одной оси с проксимальным сегментом внешней трубки 2404. По меньшей мере в одном варианте осуществления монтажный шар 2470 можно произвести сегментами, которые прикрепляются друг к другу соответствующими конфигурациями крепления (например, сваркой, адгезивом, шурупами и т.п.). Как показано на ФИГ. 50, штоки активатора шарнира 2422 и 2432 проходят через пазы 2472 в проксимальном сегменте внешней трубки 2404 и пазы 2474 в монтажном шаре 2470, позволяя ползункам шарнира 2420, 2430 перемещаться по оси относительно них. Хотя это и не показано на фигурах, штоки активатора шарнира 2442, 2452 проходят через аналогичные пазы 2472, 2474 в проксимальном сегменте внешней трубки 2404 и в монтажном шаре 2470. Каждый из штоков активатора шарнира 2422, 2432, 2442, 2452 выступает из соответствующих пазов 2474 в монтажном шаре 2470, и это позволяет им функционально приниматься внутрь соответствующих монтажных гнезд 2466 узла кольца шарнира 2460. См. ФИГ. 49.
По меньшей мере в одном примере формы узел кольца шарнира 2460 произведен из пары кольцевых сегментов 2480, 2490, соединенных друг с другом, например, путем сварки, адгезива, защелок, винтов и т.п., с образованием узла кольца шарнира 2460. Кольцевые сегменты 2480, 2490 в совокупности образуют монтажные гнезда 2466. Каждый из штоков активатора шарнира имеет монтажный шар 2468, образованный на нем, каждый из которых выполнен с возможностью приема с возможностью перемещения в соответствующее монтажное гнездо 2466 узла кольца шарнира 2460.
В различных вариантах осуществления привод шарнира 2410 может дополнительно включать вариант осуществления системы блокировки 2486, выполненной с возможностью удержания узла кольца шарнира 2460 в активированном положении. По меньшей мере в одном примере формы система блокировки 2486 содержит множество блокирующих отворотов, образованных на узле кольца шарнира 2460. Например, кольцевые сегменты 2480, 2490 могут быть произведены из какого либо гибкого полимера или резиноподобного материала. Кольцевой сегмент 2480 содержит ряд образованных в нем гибких проксимальных блокирующих отворотов 2488, а кольцевой сегмент 2490 содержит ряд образованных в нем гибких дистальных блокирующих отворотов 2498. Каждый блокирующий отворот 2388 имеет по меньшей мере один блокирующий стопор 2389, образованный на нем, и каждый блокирующий отворот 2398 имеет на нем по меньшей мере один блокирующий стопор 2399. Блокирующие стопоры 2389, 2399 могут функционировать таким образом, чтобы обеспечить достаточное блокирующее трение о шар шарнира, чтобы шар шарнира удерживался в определенном положении. В других вариантах осуществления блокирующие стопоры 2389, 2390 выполнены с возможностью соединительного зацепления с различными блокирующими лунками, образованными по внешнему периметру монтажного шара 2470.
Работа привода шарнира 2410 показана на ФИГ. 49 и 50. На ФИГ. 49 показан привод шарнира 2410 в не повернутом шарнирно положении. На ФИГ. 50 врач вручную отклоняет узел кольца шарнира 2460, в результате чего ползунок шарнира 2420 перемещается по оси в дистальном направлении DD, таким образом дистально продвигая сегмент кабеля шарнира 434A'. Такое перемещение узла кольца шарнира 2460 также приводит к осевому перемещению ползунка шарнира 2430 в проксимальном направлении, в результате чего кабель шарнира 434B оттягивается в проксимальном направлении. Такое проталкивание и оттягивание сегментов кабеля шарнира 434A', 434B' приводит к шарнирному повороту концевого эффектора 3000 относительно продольной оси инструмента LT-LT таким образом, как это описано выше. Чтобы изменить направление шарнирного поворота на обратное, врач просто меняет ориентацию узла кольца шарнира 2460 на противоположную, в результате чего ползунок шарнира 2430 будет перемещаться в дистальном направлении DD, а ползунок шарнира 2420 будет перемещаться в проксимальном направлении PD. Узел кольца шарнира 2460 можно аналогичным образом активировать, чтобы сообщить желаемые толкающие или тянущие движения сегментам кабеля шарнира 454A', 454B'. Трение, возникающее между блокирующими стопорами 2389, 2399 и внешним периметром монтажного шара, используется для того, чтобы удерживать привод шарнира 2410 в определенном положении после того, как концевой эффектор 3000 будет шарнирно повернут в желаемое положение. В альтернативных примерах осуществления, если блокирующие стопоры 2389, 2399 расположены так, чтобы приниматься в соответствующие блокирующие лунки в монтажном шаре, монтажный шар будет удерживаться в определенном положении.
В показанном и других примерах осуществления узел удлиненного стержня 2402 функционально взаимодействует с узлом рукоятки 2500. Пример осуществления узла рукоятки 2500 содержит пару сегментов корпуса рукоятки 2502, 2504, соединенных друг с другом с образованием корпуса для различных приводных компонентов и систем, как более подробно описано ниже. См., например, ФИГ. 46. Сегменты корпуса рукоятки 2502, 2504 могут соединяться винтами, защелками, адгезивом и т.п. Соединенные вместе сегменты корпуса рукоятки 2502, 2504 могут образовывать узел рукоятки 2500, который включает пистолетную рукоятку 2506.
Для обеспечения избирательного поворота концевого эффектора 3000 вокруг продольной оси инструмента LT-LT узел удлиненного стержня 2402 может взаимодействовать с первой приводной системой, по существу обозначенной элементом 2510. Приводная система 2510 включает активируемую вручную поворотную форсунку 2512, поддерживаемую с возможностью поворота на узле рукоятки 2500 таким образом, чтобы ее можно было поворачивать относительно узла рукоятки, а также перемещать по оси между заблокированным положением и разблокированным положением.
Хирургический инструмент 2400 может включать закрывающую систему 3670. Закрывающую систему 3670 можно использовать в некоторых вариантах осуществления для реализации дистального и проксимального движения в узле удлиненного стержня 2402 и концевом эффекторе 3000. Например, в некоторых вариантах осуществления закрывающая система 3670 может перемещать подвижный по оси элемент, такой как элемент 3016. Например, закрывающую систему 3670 можно использовать для поступательного перемещения подвижного по оси элемента 3016 вместо различных поворотных приводных стержней, описанных в настоящем документе применительно к ФИГ. 64-82, 83-91 и 92-96. В данном примере осуществления закрывающая система 3670 активируется закрывающим спусковым механизмом 2530, установленным шарнирно на узле рамы рукоятки 2520, который поддерживается внутри сегментов корпуса рукоятки 2502, 2504. Закрывающий спусковой механизм 2530 включает активирующую часть 2532, шарнирно установленную на шарнирном штифте 2531, который поддерживается внутри узла рамы рукоятки 2520. См. ФИГ. 51. Такой пример конфигурации обеспечивает поворотное движение в направлении к и от пистолетной рукоятки 2506 узла рукоятки 2500. Как показано на ФИГ. 51, закрывающий спусковой механизм 2530 включает закрывающее звено 2534, соединенное с первым поворотным звеном и узлом шестерни 3695 закрывающей проволокой 2535. Таким образом, при повороте закрывающего спускового механизма 2530 к пистолетной рукоятке 2506 узла рукоятки 2500 в активированное положение закрывающее звено 2534 и закрывающая проволока 2535 приводят к тому, что первое поворотное звено и узел шестерни 3695 перемещаются в дистальном направлении DD, вызывая дистальное движение в стержне и, в некоторых вариантах осуществления, в концевом эффекторе.
Хирургический инструмент 2400 может дополнительно включать систему блокировки закрывающего спускового механизма 2536, которая удерживает закрывающий спусковой механизм в активированном положении. По меньшей мере в одном примере формы система блокировки закрывающего спускового механизма 2536 включает элемент блокировки закрытия 2538, шарнирно соединенный с узлом рамы рукоятки 2520. Как показано на ФИГ. 52 и 53, элемент блокировки закрытия 2538 имеет образованное на нем блокирующее плечо 2539, выполненное с возможностью перемещения поверх дугообразной части 2537 закрывающего звена 2532 при инициировании перемещения закрывающего спускового механизма 2530 к пистолетной рукоятке 2506. После поворота закрывающего спускового механизма 2530 в полностью активированное положение блокирующее плечо 2539 падает за торец закрывающего звена 2532 и позволяет закрывающему спусковому механизму 2530 вернуться в неактивированное положение. Таким образом, можно зафиксировать дистальное движение, поступательно переданное по узлу стержня к концевому эффектору. Чтобы позволить закрывающему спусковому механизму 2530 вернуться в неактивированное положение, врач просто поворачивает элемент блокировки закрытия 2538 до тех пор, пока его блокирующее плечо 2539 не расцепится с торцом закрывающего звена 2532, тем самым позволяя закрывающему звену 2532 перейти в неактивированное положение.
Закрывающий спусковой механизм 2532 возвращается в неактивированное положение при помощи системы возврата 2540 закрывающего механизма. Например, как показано на ФИГ. 51, один пример формы системы возврата закрывающего спускового механизма 2540 включает скользящий элемент закрывающего спускового механизма 2542, соединенный с закрывающим звеном 2534 направляющей траверсой 2544 закрывающего спускового механизма. Скользящий элемент закрывающего спускового механизма 2542 поддерживается с возможностью скольжения в полости 2522 для скользящего элемента узла рамы рукоятки 2520. Пружина возврата 2546 закрывающего спускового механизма расположена внутри полости 2520 для скользящего элемента и прилагает смещающее усилие к скользящему элементу 2542 закрывающего спускового механизма. Таким образом, когда врач активирует закрывающий спусковой механизм 2530, направляющая траверса 2544 закрывающего спускового механизма перемещает скользящий элемент закрывающего спускового механизма 2542 в дистальном направлении DD, сжимая пружину возврата 2546 закрывающего спускового механизма. При расцеплении системы блокировки закрывающего механизма 2536 и отпускании закрывающего спускового механизма 2530 пружина возврата закрывающего механизма 2546 перемещает скользящий элемент закрывающего механизма 2542 в проксимальном направлении PD, тем самым поворачивая закрывающий спусковой механизм 2530 в исходное неактивированное положение.
В хирургическом инструменте 2400 также можно использовать любые различные примеры узлов приводного стержня, описанные выше. По меньшей мере в одном примере формы в хирургическом инструменте 2400 используется вторая приводная система 2550, сообщающая поворотные управляющие движения проксимальному узлу приводного стержня 380'. См. ФИГ. 55. Вторая приводная система 2550 может включать узел двигателя 2552, который функционально поддерживается в пистолетной рукоятке 2506. Узел двигателя 2552 может получать питание от батареи 2554, съемно прикрепленной к узлу рукоятки 2500, или от источника переменного тока. Вторая приводная шестерня 2556 функционально соединена с приводным стержнем 2555 узла двигателя 2552. Вторая приводная шестерня 2556 поддерживается в зубчатом зацеплении со второй поворотной ведомой шестерней 2558, прикрепленной к проксимальному сегменту приводного стержня 380’ узла приводного стержня. Например, по меньшей мере в одной форме вторая приводная шестерня 2556 также может перемещаться по оси на приводном стержне двигателя 2555 относительно узла двигателя 2552 в направлениях, обозначенных стрелкой U на ФИГ. 55. Смещающий элемент, например, спиральная пружина 2560 или аналогичный элемент, расположен между второй приводной шестерней 2556 и корпусом двигателя 2553, и предназначен для того, чтобы смещать вторую приводную шестерню 2556 на приводном стержне двигателя 2555 в зубчатое зацепление с первым сегментом шестерни 2559 на второй ведомой шестерне 2558.
Вторая приводная система 2550 может дополнительно включать узел пускового крючка 2570, который прикреплен с возможностью перемещения, например, шарнирно прикреплен к узлу рамы рукоятки 2520. По меньшей мере в одном примере формы, например, узел пускового крючка 2570 включает первый крючок поворотного привода 2572, который взаимодействует с соответствующим переключателем/контактом (не показан), находящимся в электрической связи с узлом двигателя 2552, активация которого приводит к тому, что узел двигателя 2552 сообщает первое поворотное приводное движение второй ведомой шестерне 2558. Кроме того, узел пускового крючка 2570 дополнительно включает крючок привода оттягивания 2574, способный поворачиваться относительно первого крючка поворотного привода. Крючок привода оттягивания 2574 функционально взаимодействует с переключателем/контактом (не показан), находящимся в электрической связи с узлом двигателя 2552, активация которого приводит к тому, что узел двигателя 2552 сообщает второе поворотное приводное движение второй ведомой шестерне 2558. Первое поворотное приводное движение приведет к повороту узла приводного стержня и к тому, что приводной стержень инструмента в концевом эффекторе будет воздействовать на пусковой элемент так, чтобы тот дистально перемещался в концевом эффекторе 3000. С другой стороны, второе поворотное приводное движение противоположно первому поворотному приводному движению, и оно в конечном счете приведет к повороту узла приводного стержня и приводного стержня инструмента в направлении поворота, что приведет к проксимальному перемещению или оттягиванию пускового элемента в концевом эффекторе 3000.
Показанный вариант осуществления также включает активируемый вручную элемент безопасности 2580, шарнирно прикрепленный к активирующей части закрывающего спускового механизма 2532 и способный избирательно поворачиваться между первым «безопасным» положением, в котором элемент безопасности 2580 физически препятствует поворотному движению узла пускового крючка 2570, и вторым, «выключенным» положением, при котором врач может свободно поворачивать узел пускового крючка 2570. Как показано на ФИГ. 51, в активирующей части закрывающего пускового механизма 2532 предусмотрена первая лунка 2582, соответствующая первому положению элемента безопасности 2580. Когда элемент безопасности 2580 находится в первом положении, стопор (не показан) на элементе безопасности 2580 принимает первая лунка 2582. Также в активирующей части закрывающего спускового механизма 2532 предусмотрена вторая лунка 2584, соответствующая второму положению элемента безопасности 2580. Когда элемент безопасности 2580 находится во втором положении, стопор на элементе безопасности 2580 принимает вторая лунка 2582.
По меньшей мере в некоторых примерах форм хирургический инструмент 2400 может включать реверсирующую систему с механической активацией, по существу обозначенную элементом 2590, для механического сообщения обратного поворотного движения проксимальному сегменту приводного стержня 380' при выходе из строя узла двигателя 2552 или прекращении или перебое питания. Такая механическая реверсирующая система 2590 может быть особенно подходящим решением, например, если компоненты системы приводного стержня, функционально связанные с проксимальным сегментом приводного стержня 380', окажутся зажаты или иным способом заблокированы таким образом, что поворот компонентов приводного стержня в обратном направлении только под воздействием двигателя станет невозможен. По меньшей мере в одном примере формы реверсирующая система с механической активацией 2590 включает реверсирующую шестерню 2592, установленную с возможностью поворота на стержне 2524A, выполненном на узле рамы рукоятки 2520, находящуюся в зубчатом зацеплении со вторым сегментом шестерни 2562 на второй ведомой шестерне 2558. См. ФИГ. 53. Таким образом, реверсирующая шестерня 2592 свободно поворачивается на стержне 2524A, когда вторая ведомая шестерня 2558 поворачивает проксимальный сегмент приводного стержня 380' узла приводного стержня.
В различных примерах форм механическая реверсирующая система 2590 дополнительно включает активируемый вручную шкив 2594 в форме плеча рычага 2596. Как показано на ФИГ. 56 и 57, плечо рычага 2596 включает направляющую траверсу 2597, имеющую удлиненные пазы 2598 через нее. Стержень 2524A проходит через паз 2598A, а второй противоположный стержень 2598B, образованный на узле корпуса рукоятки 2520, проходит через другой удлиненный паз, прикрепляя с возможностью перемещения к узлу корпуса плечо рычага 2596. Кроме того, плечо рычага 2596 имеет пластину активатора 2597, образованную на нем, которая может зубчатым образом зацеплять реверсирующую шестерню 2592. Предусмотрен стопор или зацеп, который удерживает плечо рычага 2596 в неактивированном положении до тех пор, пока врач не приложит достаточного усилия для его активации. Это предотвращает случайную активацию в перевернутом состоянии. В других вариантах осуществления можно использовать пружину, смещающую плечо рычага в неактивированное состояние. В различных примерах осуществления механическая реверсирующая система 2590 дополнительно включает кнопку оттягивания скальпеля 2600, подвижно удерживаемую в узле рамы рукоятки 2520. Как показано на ФИГ. 56 и 57, кнопка оттягивания скальпеля 2600 включает расцепляющую кромку 2602, выполненную с возможностью зацепления со второй приводной шестерней 2556. Кнопка оттягивания скальпеля 2600 сдвигается в расцепленное положение пружиной оттягивания скальпеля 2604. В расцепленном положении расцепляющая кромка 2602 смещена из зацепления со второй приводной шестерней 2556. Таким образом, до тех пор пока врачу не понадобится активировать механическую реверсирующую систему 2590 путем нажатия кнопки оттягивания скальпеля 2600, вторая приводная шестерня 2556 будет находиться в зубчатом зацеплении с первым сегментом шестерни 2559 второй ведомой шестерни 2558.
Когда врачу необходимо сообщить обратное поворотное приводное движение проксимальному сегменту приводного стержня 380', врач нажимает кнопку оттягивания скальпеля 2600 и расцепляет первый сегмент шестерни 2559 на второй ведомой шестерне 2558 со второй приводной шестерней 2556. После этого врач начинает сообщать поворотное одностороннее движение активируемому вручную шкиву 2594, в результате чего находящаяся на нем пластина шестерни 2597 двигает реверсирующую шестерню 2592. Реверсирующая шестерня 2592 находится в зубчатом зацеплении со вторым сегментом шестерни 2562 на второй ведомой шестерне 2558. Продолжающееся одностороннее движение активируемого вручную шкива 2594 приводит к сообщению обратного поворотного движения второму сегменту шестерни 2562 и в конечном счете проксимальному сегменту приводного стержня 380'. Врач может продолжать одностороннее движение шкива 2594 столько, сколько это необходимо для полного освобождения или обратного движения связанного(-ых) с ним компонента(-ов) концевого эффектора. После сообщения необходимого количества обратного поворотного движения проксимальному сегменту приводного стержня 380' врач отпускает кнопку оттягивания скальпеля 2600 и шкив 2594 в их соответствующие исходные или неактивированные положения, в которых пластина 2597 выведена из зацепления с реверсирующей шестерней 2592 и вторая приводная шестерня 2556 снова находится в зубчатом зацеплении с первым сегментом шестерни 2559 на второй ведомой шестерне 2558.
Хирургический инструмент 2400 также можно использовать с электрохирургическим концевым эффектором, содержащим различные поворотные приводные компоненты, которые по разному активируются поворотным приводным стержнем в разных осевых положениях. Примеры таких концевых эффекторов и приводных механизмов описаны в настоящем документе применительно к ФИГ. 64-82, 83-91 и 92-96. В хирургическом инструменте 2400 можно использовать сдвигающую систему 2610 для избирательного осевого смещения проксимального сегмента приводного стержня 380', которая перемещает шестерню стержня 376 в зубчатое зацепление с первой поворотной приводной шестерней 374 и из него. Например, проксимальный сегмент приводного стержня 380' поддерживается с возможностью перемещения в узле рамы рукоятки 2520 таким образом, что проксимальный сегмент приводного стержня 380’ может перемещаться в нем по оси и поворачиваться. По меньшей мере в одном примере формы сдвигающая система 2610 дополнительно включает направляющую траверсу сдвигателя 2612, поддерживаемую с возможностью скольжения в узле рамы рукоятки 2520. См. ФИГ. 51 и 54. Проксимальный сегмент приводного стержня 380' имеет на себе пару колец 386 (показаны на ФИГ. 51 и 55), расположенных таким образом, чтобы смещение направляющей траверсы сдвигателя 2612 в узле рамы рукоятки 2520 приводило к осевому перемещению проксимального сегмента приводного стержня 380'. По меньшей мере в одной форме сдвигающая система 2610 дополнительно включает узел кнопки сдвигателя 2614, который функционально взаимодействует с направляющей траверсой сдвигателя 2612 и проходит через паз 2505 в сегменте корпуса рукоятки 2504 узла рукоятки 2500. См. ФИГ. 62 и 63. Пружина сдвигателя 2616 установлена с узлом рамы рукоятки 2520 таким образом, что зацепляется с проксимальным сегментом приводного стержня 380'. См. ФИГ. 54 и 61. Пружина 2616 выполнена с возможностью обеспечивать врачу слышимый щелчок и тактильную обратную связь при скользящем перемещении узла кнопки сдвигателя 2614 между первым осевым положением, показанным на ФИГ. 62, в котором поворот узла приводного стержня приводит к повороту концевого эффектора 3000 вокруг продольной оси инструмента LT-LT относительно шарнирного сочленения 3500 (показано на ФИГ. 67), и вторым осевым положением, показанным на ФИГ. 63, в котором поворот узла приводного стержня приводит к осевому перемещению пускового элемента в концевом эффекторе (показано на ФИГ. 66). Таким образом, такая конфигурация позволяет врачу легко изменять с возможностью скольжения положение кнопки узла кнопки сдвигателя 2614, удерживая при этом узел рукоятки 2500. В некоторых вариантах осуществления узел кнопки сдвигателя 2500 может иметь более двух осевых положений, соответствующих более чем двум желаемым осевым положениям поворотного приводного стержня. Примеры таких хирургических инструментов представлены в настоящем документе применительно к ФИГ. 83-91 и 92-96.
Как показано на ФИГ. 64-72, многоосевой шарнирный и поворотный хирургический инструмент 600 содержит концевой эффектор 550, содержащий первый элемент бранши 602A и второй элемент бранши 602B. Первый элемент бранши 602A выполнен с возможностью перемещения относительно второго элемента бранши 602B между открытым положением (ФИГ. 64, 66-69, 71) и закрытым положением (ФИГ. 70 и 72) с зажатием ткани между первым элементом бранши 602A и вторым элементом бранши 602B. Хирургический инструмент 600 выполнен с возможностью независимого шарнирного поворота в шарнирном сочленении 640 в вертикальном направлении (обозначенном V на ФИГ. 64 и 66-72) и в горизонтальном направлении (обозначенном H на ФИГ. 64 и 65-68). Шарнирное сочленение 640 можно активировать способами, аналогичными описанным выше применительно к ФИГ. 24-26. Хирургический инструмент 600 выполнен с возможностью независимого поворота вокруг поворотного соединения головки 645 в продольном направлении (обозначенном H на ФИГ. 64 и 66-72). Концевой эффектор 550 содержит двутавровый элемент 620 и узел браншей 555, содержащий первый элемент бранши 602A, второй элемент бранши 602B, проксимальную часть 603 второго элемента бранши 602B и поворотную приводную гайку 606, установленную в проксимальной части 603. Двутавровый элемент 620 и узел браншей 555 может работать так, как описано в настоящем документе, и аналогично тому, что описано выше применительно к перемещаемому в осевом направлении элементу 3016 и описанным выше элементам бранши 3008A, 3008B.
Концевой эффектор 550 соединен с узлом стержня 560, содержащим корпус привода концевого эффектора 608, соединительную трубку концевого эффектора 610, сегмент промежуточной шарнирной трубки 616 и дистальную часть внешней трубки 642. Концевой эффектор 550 и узел стержня 560 вместе образуют хирургический инструмент 600. Концевой эффектор 550 можно съемно соединить с корпусом привода концевого эффектора 608 с использованием механизма, описанного, например, применительно к ФИГ. 106-115. Соединительная трубка концевого эффектора 610 содержит цилиндрическую часть 612 и шаровой элемент 614. Корпус привода концевого эффектора 608 соединяется с цилиндрической частью 612 соединительной трубки концевого эффектора 610 через поворотное соединение головки 645. Концевой эффектор 550 и корпус концевого эффектора 608 вместе образуют головку 556 хирургического инструмента 600. Головка 556 хирургического инструмента 600 может независимо поворачиваться вокруг поворотного соединения головки 645, как более подробно описано ниже.
Сегмент промежуточной шарнирной трубки 616 содержит шаровой элемент 618 и шаровое гнездо 619. Соединительная трубка концевого эффектора 610 соединена с сегментом промежуточной шарнирной трубки 616 при помощи шаро-гнездового соединения, образуемого взаимным зацеплением шарового элемента 614 соединительной трубки концевого эффектора 610 с шаровым гнездом 619 сегмента промежуточной шарнирной трубки 616. Сегмент промежуточной шарнирной трубки 616 соединен с дистальной частью внешней трубки 642 при помощи шаро-гнездового соединения, образуемого взаимным зацеплением шарового элемента 618 сегмента промежуточной шарнирной трубки 616 с шаровым гнездом дистальной части внешней трубки 642. Шарнирное сочленение 640 содержит соединительную трубку концевого эффектора 610, сегмент промежуточной шарнирной трубки 616 и дистальную часть внешней трубки 642. Независимый вертикальный и/или горизонтальный шарнирный поворот хирургического инструмента 600 вокруг шарнирного сочленения 640 можно инициировать, например, с использованием независимо активируемых сегментов кабеля, таких как 444, 445, 446, 447, описанных выше в настоящем документе, соединенных с шаровым элементом 614 соединительной трубки концевого эффектора 610. Данная независимая шарнирная функциональность описана, например, применительно к ФИГ.24, 24A и 25. Роботизированные и портативные устройства, предоставляющие врачу возможность выполнить шарнирный поворот, описаны, например, применительно к ФИГ. 6, 16-21 и 46-50.
Перемещение первого элемента бранши 602A относительно второго элемента бранши 602B между открытым положением (ФИГ. 64, 66-69 и 71) и закрытым положением (ФИГ. 70 и 72) можно инициировать при помощи подходящего закрывающего исполнительного механизма. Как показано на ФИГ. 73 и 74, закрытие узла браншей 555 можно инициировать путем поступательного перемещения двутаврового элемента 620. Двутавровый элемент 620 содержит первый фланец двутаврового элемента 622A и второй фланец двутаврового элемента 622B. Первый фланец двутаврового элемента 622A и второй фланец двутаврового элемента 622B соединены промежуточной частью 624. Промежуточная часть 624 двутаврового элемента 620 содержит режущий элемент 625, выполненный с возможностью рассечения ткани, зажатой между первым элементом бранши 602A и вторым элементом бранши 602B, когда узел браншей 555 находится в закрытом положении. Двутавровый элемент 620 выполнен с возможностью поступательного перемещения внутри первого канала 601A в первом элементе бранши 602A и внутри второго канала 601B во втором элементе бранши 602B. Первый канал 601A содержит фланец первого канала 605A, а второй канал 601B содержит фланец второго канала 605B. Первый фланец двутаврового элемента 622A может образовывать первую криволинейную поверхность 626A, а второй фланец двутаврового элемента 622B может образовывать вторую криволинейную поверхность 626B. Первая и вторая криволинейные поверхности 626A и 626B могут зацеплять с возможностью скольжения направленные наружу противоположные поверхности фланцев первого и второго каналов 605A и 605B соответственно. Более конкретно, первая криволинейная поверхность 626A может иметь подходящий профиль, выполненный с возможностью скользящего зацепления с противоположной поверхностью фланца первого канала 605A первого элемента бранши 602A, и аналогично вторая криволинейная поверхность 626B может иметь подходящий профиль, выполненный с возможностью скользящего зацепления с противоположной поверхностью фланца второго канала 605B второго элемента бранши 602B таким образом, что при дистальном продвижении двутаврового элемента 620 криволинейные поверхности 626A и 626B будут взаимодействовать и поднимать кулачком первый элемент бранши 602A ко второму элементу бранши 602B, а также перемещать узел браншей 555 из открытого положения в закрытое положение, как показано стрелкой 629 на ФИГ. 74.
На ФИГ. 73 представлен двутавровый элемент 620, находящийся в крайнем проксимальном положении, и узел браншей 555, находящийся в открытом положении. В положении, показанном на ФИГ. 73, первая криволинейная поверхность 626A зацепляет проксимальную часть дугообразной поверхности упора 628, которая механически удерживает первый элемент бранши 602A в открытом состоянии относительно второго элемента бранши 602B (ФИГ. 69 и 71). Дистальное перемещение двутаврового элемента 620 в продольном направлении (обозначенном L на ФИГ. 64 и 66-74) приводит к скользящему зацеплению первой криволинейной поверхности 626A с длинной стороной дугообразной поверхности упора 628, в результате чего первый элемент бранши 602A поднимается кулачком ко второму элементу бранши 602B до тех пор, пока первая криволинейная поверхность 626A не зацепит дистальную часть дугообразной поверхности упора 628. После дистального поступательного перемещения двутаврового элемента 620 на предварительно заданное расстояние первая криволинейная поверхность 626A зацепляет дистальную часть дугообразной поверхности упора 628, и узел браншей оказывается в закрытом положении (ФИГ. 74). Затем двутавровый элемент 620 можно дополнительно дистально поступательно перемещать для рассечения ткани, зажатой между первым элементом бранши 602A и вторым элементом бранши 602B в закрытом положении.
В течение дистального поступательного перемещения двутаврового элемента 620 после закрытия узла браншей первая и вторая криволинейные поверхности 626A и 626B первого и второго фланцев двутаврового элемента 622A и 622B зацепляют с возможностью скольжения противоположные поверхности фланцев первого и второго каналов 605A и 605B соответственно. Таким образом, двутавровый элемент дистально продвигается по первому и второму каналам 601A и 601B первого и второго элементов бранши 602A и 602B.
Дистальный, или ведущий, конец двутаврового элемента 620 содержит режущий элемент 625, который может представлять собой острую кромку или скальпель, выполненный с возможностью разрезания зажатой ткани в течение такта дистального поступательного перемещения двутаврового элемента, в результате чего происходит рассечение ткани. Как показано на ФИГ. 72 и 70, двутавровый элемент 620 показан в крайнем дистальном положении после завершения такта дистального поступательного перемещения. После такта дистального поступательного перемещения двутавровый элемент 620 можно проксимально оттянуть назад в продольное положение, показанное на ФИГ. 74, в котором узел браншей остается закрытым и зажимающим рассеченную ткань между первым элементом бранши 602A и вторым элементом бранши 602B. Дополнительное оттягивание двутаврового элемента в крайнее проксимальное положение (ФИГ. 69, 71, и 73) приведет к зацеплению первой криволинейной поверхности 626A с проксимальной частью поверхности упора 628, в результате чего первый элемент бранши 602A будет поднят кулачком от второго элемента бранши 602B с открытием узла браншей 555.
До, в течение или после продвижения двутаврового элемента 620 через ткань, зажатую между первым элементом бранши 602A и вторым элементом бранши 602B, можно подать электрический ток на электроды, размещенные в первом и/или втором элементах бранши 602A и 602B, чтобы соединить/сплавить ткань, как более подробно описано в настоящем документе. Например, электроды могут быть выполнены с возможностью подачи РЧ-энергии на ткань, зажатую между первым элементом бранши 602A и вторым элементом бранши 602B, находящимися в закрытом положении, для соединения/спайки ткани.
Дистальное и проксимальное поступательное перемещение двутаврового элемента 620 между проксимальным оттянутым положением (ФИГ. 64, 66-69, 71, и 73), промежуточным положением (ФИГ. 74) и дистальным продвинутым положением (ФИГ. 70 и 72) можно выполнять при помощи подходящего исполнительного механизма осуществления поступательного перемещения. Как показано на ФИГ. 65-72, двутавровый элемент 620 соединен с резьбовым поворотным приводным элементом 604. На резьбовой поворотный приводной элемент 604 навинчена резьбовая поворотная приводная гайка 606. Резьбовая поворотная приводная гайка 606 установлена в проксимальной части 603 второго элемента бранши 602B. Резьбовая поворотная приводная гайка 606 механически ограничена в своем поступательном перемещении в любом направлении, но резьбовая поворотная приводная гайка 606 может поворачиваться внутри проксимальной части 603 второго элемента бранши 602B. Следовательно, учитывая резьбовое зацепление поворотной приводной гайки 606 и резьбового поворотного приводного элемента 604, поворотное движение поворотной приводной гайки 606 преобразуется в поступательное движение резьбового поворотного приводного элемента 604 в продольном направлении и, в свою очередь, в поступательное движение двутаврового элемента 620 в продольном направлении.
Резьбовой поворотный приводной элемент 604 ввинчен в поворотную приводную гайку 606 и находится внутри просвета поворотного приводного стержня 630. Резьбовой поворотный приводной элемент 604 не прикреплен к поворотному приводному стержню 630 и не соединен с ним. Резьбовой поворотный приводной элемент 604 может свободно перемещаться внутри просвета поворотного приводного стержня 630 и будет поступательно перемещаться в просвете поворотного приводного стержня 630 при приведении в движение посредством поворота поворотной приводной гайки 606. Поворотный приводной стержень 630, содержащий резьбовой поворотный приводной элемент 604, который находится внутри просвета поворотного приводного стержня 630, образует концентрический узел поворотного приводного стержня/винта, находящийся в просвете узла стержня 560.
Как показано на ФИГ. 65, корпус привода концевого эффектора 608, соединительная трубка концевого эффектора 610 и сегмент промежуточной шарнирной трубки 616, которые вместе образуют узел стержня 560, имеют сквозные просветы, и, следовательно, узел стержня имеет просвет, как показано на ФИГ. 66-68. Как также показано на ФИГ. 66-68, концентрический узел поворотного приводного стержня и резьбового поворотного приводного элемента размещен внутри просвета узла стержня 560 и проходит через корпус привода концевого эффектора 608, соединительную трубку концевого эффектора 610 и сегмент промежуточной шарнирной трубки 616. Хотя это не показано на ФИГ. 66-68, через просвет дистальной части внешней трубки 642 проходит по меньшей мере поворотный приводной стержень 630, который функционально соединен с приводным механизмом, обеспечивающим поворотное и поступательное движение по оси поворотного приводного стержня 630. Например, в некоторых вариантах осуществления хирургический инструмент 600 можно функционально соединять при помощи узла стержня 560 с роботизированной хирургической системой, обеспечивающей поворотное движение и поступательное движение по оси поворотного приводного стержня 630, такой как роботизированные хирургические системы, описанные применительно к ФИГ. 5 и 16-21. Например, поворотный приводной стержень 630 может функционально соединяться через узел стержня 560 с проксимальным сегментом приводного стержня 380, описанным выше в настоящем документе. Также в некоторых вариантах осуществления хирургический инструмент 600 можно использовать в сочетании с портативным хирургическим устройством, таким как устройство, описанное выше в настоящем документе применительно к ФИГ. 46-63. Например, поворотный приводной стержень 630 может функционально соединяться через узел стержня 560 с проксимальным сегментом приводного стержня 380', описанным выше в настоящем документе.
Поворотный приводной стержень 630 содержит поворотную приводную головку 632. Поворотная приводная головка 632 содержит гнездовую шестигранную соединительную часть 634 на дистальной стороне поворотной приводной головки 632, и поворотная приводная головка 632 содержит штифтовую шестигранную соединительную часть 636 на проксимальной стороне поворотной приводной головки 632. Дистальная гнездовая шестигранная соединительная часть 634 поворотной приводной головки 632 выполнена с возможностью механического зацепления со штифтовой шестигранной соединительной частью 607 поворотной приводной гайки 606, размещенной на проксимальной стороне поворотной приводной гайки 606. Проксимальная штифтовая шестигранная соединительная часть 636 поворотной приводной головки 632 выполнена с возможностью механического зацепления с гнездовой шестигранной соединительной частью 609 корпуса привода концевого эффектора 608.
Как показано на ФИГ. 66, 67, 69 и 70, поворотный приводной стержень 630 показан в крайнем дистальном осевом положении, в котором гнездовая шестигранная соединительная часть 634 поворотной приводной головки 632 находится в механическом зацеплении со штифтовой шестигранной соединительной частью 607 поворотной приводной гайки 606. В данной конфигурации поворот поворотного приводного стержня 630 инициирует поворот поворотной приводной гайки 606, который инициирует поступательное перемещение резьбового поворотного приводного элемента 604, который инициирует поступательное перемещение двутаврового элемента 620. Резьба резьбового поворотного приводного элемента 604 и поворотной приводной гайки 606 может быть ориентирована таким образом, чтобы дистальное или проксимальное поступательное перемещение резьбового поворотного приводного элемента 604 и двутаврового элемента 620 инициировалось поворотом поворотного приводного стержня 630 по часовой стрелке или против часовой стрелки. Таким образом, направление, скорость и продолжительность поворота поворотного приводного стержня 630 можно контролировать, управляя направлением, скоростью и величиной продольного поступательного перемещения двутаврового элемента 620 и, следовательно, закрытием и открытием узла браншей и тактом рассечения двутаврового элемента вдоль первого и второго каналов 601A и 601B, как описано выше.
Например, как показано на ФИГ. 69, поворот поворотного приводного стержня 630 по часовой стрелке (если смотреть от проксимальной к дистальной стороне) инициирует поворот по часовой стрелке поворотной приводной гайки 606, который инициирует дистальное поступательное перемещение резьбового поворотного приводного элемента 604, которое инициирует дистальное поступательное перемещение двутаврового элемента 620, которое инициирует закрытие узла браншей и дистальный такт рассечения двутавровым элементом 620/режущим элементом 625. Как показано на ФИГ. 70, поворот поворотного приводного стержня 630 против часовой стрелки (если смотреть от проксимальной к дистальной стороне) инициирует поворот против часовой стрелки поворотной приводной гайки 606, который инициирует проксимальное поступательное перемещение резьбового поворотного приводного элемента 604, которое инициирует проксимальное поступательное перемещение двутаврового элемента 620, которое инициирует проксимальный возвратный такт двутаврового элемента 620 или режущего элемента 625 и открытие узла браншей. Таким образом, поворотный приводной стержень 630 можно применять для независимой активации открытия и закрытия узла браншей и проксимально дистального такта двутаврового элемента 620 или режущего элемента 625.
Как показано на ФИГ. 68, 71 и 72, поворотный приводной стержень 630 показан в крайнем проксимальном осевом положении, в котором штифтовая шестигранная соединительная часть 636 поворотной приводной головки 632 механически зацеплен с гнездовой шестигранной соединительной частью 609 корпуса привода концевого эффектора 608. В данной конфигурации поворот поворотного приводного стержня 630 инициирует поворот головки 556 хирургического инструмента 600 вокруг поворотного соединения 645, включая поворот концевого эффектора 550 и корпуса привода концевого эффектора 608. В данной конфигурации часть хирургического инструмента 600, дистальная к поворотному соединению головки 645 (т.е. части головки 556 хирургического инструмента 600, содержащей концевой эффектор 550 и корпус привода концевого эффектора 608), поворачивается вместе с поворотом поворотного приводного стержня 630, а часть хирургического инструмента, проксимальная к поворотному соединению головки 645 (например, соединительная трубка 610 концевого эффектора, сегмент промежуточной шарнирной трубки 616 и дистальная часть внешней трубки 642), не поворачивается вместе с поворотом поворотного приводного стержня 630. Следует понимать, что желательная скорость поворота поворотного приводного стержня 630 для работы поворотной приводной гайки 606 может быть больше, чем желательная скорость поворота головки 556. Например, поворотный приводной стержень 630 может приводиться в движение двигателем (не показан), выполненным с возможностью развивать разные скорости поворота.
Например, как показано на ФИГ. 71, поворот поворотного приводного стержня 630 по часовой стрелке (если смотреть от проксимальной к дистальной стороне) инициирует поворот по часовой стрелке концевого эффектора 550 и корпуса привода концевого эффектора 608 (т.е. части головки 556 хирургического инструмента 600) при открытом узле браншей 555. Поворот поворотного приводного стержня 630 против часовой стрелки (если смотреть от проксимальной к дистальной стороне) инициирует поворот против часовой стрелки концевого эффектора 550 и корпуса привода концевого эффектора 608 при открытом узле браншей 555. Как показано на ФИГ. 72, поворот поворотного приводного стержня 630 по часовой стрелке (если смотреть от проксимальной к дистальной стороне) инициирует поворот по часовой стрелке концевого эффектора 550 и корпуса привода концевого эффектора 608 при закрытом узле браншей 555. Поворот поворотного приводного стержня 630 против часовой стрелки (если смотреть от проксимальной к дистальной стороне) инициирует поворот против часовой стрелки концевого эффектора 550 и корпуса привода концевого эффектора 608 при закрытом узле браншей 555. Хотя это не показано на фигурах, следует понимать, что двутавровый элемент 620 может размещаться в промежуточном положении, где узел браншей закрыт, но двутавровый элемент не продвинут в крайнее дистальное положение (см., например, ФИГ. 74), когда поворотный приводной стержень 630 находится в крайнем проксимальном осевом положении, а штифтовая шестигранная соединительная часть 636 поворотной приводной головки 632 механически зацеплена с гнездовой шестигранной соединительной частью 609 корпуса привода концевого эффектора 608 для инициирования поворота головки хирургического инструмента.
Таким образом, поворотный приводной стержень 630 можно использовать для независимой активации открытия и закрытия узла браншей, проксимально дистального такта рассечения двутавровым элементом 620/режущим элементом 625 и поворота головки 556 хирургического инструмента 600d.
В различных вариантах осуществления хирургический инструмент может содержать концевой эффектор, первый исполнительный механизм и второй исполнительный механизм. Хирургический инструмент также может содержать элемент сцепления, выполненный с возможностью избирательного зацепления и передачи поворотного движения на первый исполнительный механизм или на второй исполнительный механизм. Например, в различных вариантах осуществления элемент сцепления может содержать поворотный приводной стержень, содержащий поворотную приводную головку, как описано, например, применительно к ФИГ. 64-72. В различных вариантах осуществления первый исполнительный механизм может содержать двутавровый элемент, соединенный с резьбовым поворотным приводным элементом, ввернутым в поворотную приводную гайку, как описано, например, применительно к ФИГ. 64-74, причем двутавровый элемент, резьбовой поворотный приводной элемент и поворотная приводная гайка выполнены с возможностью активации закрытия и открытия узла браншей и/или поступательного перемещения режущего элемента. В различных вариантах осуществления второй исполнительный механизм может содержать соединительную часть стержня, описанную, например, применительно к ФИГ. 64-72, причем соединительная часть стержня выполнена с возможностью активации поворота головки хирургического инструмента.
В различных вариантах осуществления хирургический инструмент может содержать концевой эффектор, содержащий первый элемент бранши, второй элемент бранши и первый исполнительный механизм, выполненный с возможностью перемещения первого элемента бранши относительно второго элемента бранши между открытым положением и закрытым положением. Хирургический инструмент также может содержать узел стержня, проксимальный к хирургическому концевому эффектору. Хирургический инструмент также может содержать поворотный приводной стержень. Поворотный приводной стержень может быть выполнен с возможностью передачи поворотных движений, а также со способностью избирательного перемещения между первым положением и вторым положением относительно узла стержня. Поворотный приводной стержень может быть выполнен с возможностью зацепления и избирательной передачи поворотных движений на первый исполнительный механизм в первом положении, и поворотный приводной стержень может быть выполнен с возможностью расцепляться с исполнительным механизмом во втором положении. Например, в различных вариантах осуществления первый исполнительный механизм может содержать двутавровый элемент, соединенный с резьбовым поворотным приводным элементом, ввернутым в поворотную приводную гайку, как описано, например, применительно к ФИГ. 64-74, причем двутавровый элемент, резьбовой поворотный приводной элемент и поворотная приводная гайка выполнены с возможностью активации закрытия и открытия узла браншей, когда поворотный приводной стержень зацепляется и избирательно передает поворотное движение на приводную гайку.
В различных вариантах осуществления хирургический инструмент может содержать хирургический концевой эффектор, содержащий первый элемент бранши, второй элемент бранши и закрывающий механизм, выполненный с возможностью перемещения первого элемента бранши относительно второго элемента бранши между открытым положением и закрытым положением. Хирургический инструмент также может содержать узел стержня, проксимальный к хирургическому концевому эффектору, причем хирургический концевой эффектор выполнен с возможностью поворота относительно узла стержня. Хирургический инструмент также может содержать поворотный приводной стержень, выполненный с возможностью передачи поворотных движений, причем поворотный приводной стержень выполнен с возможностью избирательно перемещаться по оси между первым положением и вторым положением относительно узла стержня, причем поворотный приводной стержень выполнен с возможностью сообщения поворотных движений закрывающему механизму в первом осевом положении, и причем поворотный приводной стержень выполнен с возможностью сообщения поворотных движений хирургическому концевому эффектору во втором осевом положении. Например, в различных вариантах осуществления первое осевое положение может соответствовать ситуации, когда поворотный приводной стержень находится в крайнем дистальном осевом положении, в котором поворотная приводная головка механически зацеплена с поворотной приводной гайкой, как описано, например, применительно к ФИГ. 64-72. В различных вариантах осуществления второе осевое положение может соответствовать ситуации, когда поворотный приводной стержень находится в крайнем проксимальном осевом положении, в котором поворотная приводная головка механически зацеплена с соединительной частью элемента стержня, как описано, например, применительно к ФИГ. 64-72.
В различных вариантах осуществления хирургический инструмент, содержащий концевой эффектор, первый исполнительный механизм и второй исполнительный механизм, может дополнительно содержать механизм блокировки головки. Например, как показано на ФИГ. 75-82, многоосевой шарнирный и поворотный хирургический инструмент 650 содержит концевой эффектор 570, узел стержня 580 и механизм блокировки головки 590. Концевой эффектор 570 содержит первый элемент бранши 652A и второй элемент бранши 652B. Первый элемент бранши 602A может перемещаться относительно второго элемента бранши 602B между открытым положением (ФИГ. 77 и 79) и закрытым положением (ФИГ. 78 и 80) с зажатием ткани между первым элементом бранши 652A и вторым элементом бранши 652B. Хирургический инструмент 650 выполнен с возможностью независимого шарнирного поворота вокруг шарнирного сочленения в вертикальном направлении и в горизонтальном направлении аналогично хирургическому инструменту 600, показанному на ФИГ. 64-72. Хирургический инструмент 650 также выполнен с возможностью независимого поворота вокруг поворотного соединения головки аналогично хирургическому инструменту 600, показанному на ФИГ. 64-72. Концевой эффектор 570 содержит двутавровый элемент 670 и узел браншей 575, содержащий первый элемент бранши 652A, второй элемент бранши 652B, проксимальную часть 653 второго элемента бранши 652B и поворотную приводную гайку 656, установленную в проксимальной части 653.
Концевой эффектор 570 соединен с узлом стержня 580, содержащим корпус привода концевого эффектора 658, соединительную трубку концевого эффектора 660, сегмент промежуточной шарнирной трубки 666 и элемент стержня хирургического инструмента (не показан). Концевой эффектор 570 и узел стержня 580 вместе образуют хирургический инструмент 650. Концевой эффектор 570 можно съемно соединить с корпусом привода концевого эффектора 658 с использованием механизма, описанного, например, применительно к ФИГ. 106-115. Корпус привода концевого эффектора 608 соединен с соединительной трубкой концевого эффектора 660 через поворотное соединение головки. Концевой эффектор 570 и корпус концевого эффектора 658 вместе образуют головку 578 хирургического инструмента 650. Головка 578 хирургического инструмента 650 может независимо поворачиваться вокруг поворотного соединения головки, как более подробно описано применительно к ФИГ. 64-72, где показан хирургический инструмент 600.
Соединительная трубка концевого эффектора 660 соединена с сегментом промежуточной шарнирной трубки 666 при помощи шаро-гнездового соединения, образованного взаимным зацеплением шарового элемента соединительной трубки концевого эффектора 660 и шаровым гнездом сегмента промежуточной шарнирной трубки 666. Сегмент промежуточной шарнирной трубки 666 соединен с элементом стержня хирургического инструмента при помощи шаро-гнездового соединения, образованного взаимным зацеплением шарового элемента сегмента промежуточной шарнирной трубки 616 с шаровым гнездом элемента стержня хирургического инструмента. Шарнирное сочленение содержит соединительную трубку концевого эффектора 660, сегмент промежуточной шарнирной трубки 666 и элемент стержня хирургического инструмента. Независимый вертикальный и/или горизонтальный шарнирный поворот хирургического инструмента 650 вокруг шарнирного сочленения можно инициировать, например, с использованием независимо активируемых сегментов кабеля, соединенных с шаровым элементом соединительной трубки концевого эффектора 660. Данная независимая шарнирная функциональность описана, например, применительно к ФИГ. 24-25. Роботизированные и портативные устройства, предоставляющие врачу возможность выполнить шарнирный поворот, описаны, например, применительно к ФИГ. 6, 16-21 и 46-50.
Перемещение первого элемента бранши 652A относительно второго элемента бранши 652B инициируется с использованием того же исполнительного механизма, который описан выше применительно к ФИГ. 73 и 74. Дистальное и проксимальное поступательное перемещение двутаврового элемента 670 между проксимальным оттянутым положением (ФИГ. 77 и 79), промежуточным положением (ФИГ. 74) и дистальным продвинутым положением (ФИГ. 78 и 80) можно выполнять при помощи подходящего исполнительного механизма осуществления поступательного перемещения. Как показано на ФИГ. 75-80, двутавровый элемент 670 соединен с резьбовым поворотным приводным элементом 654. На резьбовой поворотный приводной элемент 654 навинчена резьбовая поворотная приводная гайка 656. Резьбовая поворотная приводная гайка 656 установлена в проксимальной части 653 второго элемента бранши 652B. Резьбовая поворотная приводная гайка 656 механически ограничена в своем поступательном перемещении в любом направлении, но может поворачиваться внутри проксимальной части 653 второго элемента бранши 652B. Следовательно, учитывая резьбовое зацепление поворотной приводной гайки 656 и резьбового поворотного приводного элемента 654, поворотное движение поворотной приводной гайки 656 преобразуется в поступательное движение резьбового поворотного приводного элемента 654 в продольном направлении и в свою очередь в поступательное движение двутаврового элемента 670 в продольном направлении.
Резьбовой поворотный приводной элемент 654 ввинчен в поворотную приводную гайку 656 и находится внутри просвета поворотного приводного стержня 680. Резьбовой поворотный приводной элемент 654 не прикреплен к поворотному приводному стержню 680 и не соединен с ним. Резьбовой поворотный приводной элемент 654 может свободно перемещаться внутри просвета поворотного приводного стержня 680 и будет поступательно перемещаться в просвете поворотного приводного стержня 680 при приведении в движение посредством поворота поворотной приводной гайки 656. Поворотный приводной стержень 680, содержащий резьбовой поворотный приводной элемент 654, который размещен внутри просвета поворотного приводного стержня 680, образует концентрический узел поворотного приводного стержня/винта, размещенный в просвете узла стержня 580.
Как показано на ФИГ. 77-80, концентрический узел поворотного приводного стержня/винта размещен внутри просвета узла стержня 560 и проходит через корпус привода концевого эффектора 658, соединительную трубку концевого эффектора 660 и сегмент промежуточной шарнирной трубки 666. Хотя это не показано на ФИГ. 77-80, через просвет элемента стержня хирургического инструмента проходит по меньшей мере поворотный приводной стержень 680, который функционально соединен с приводным механизмом, обеспечивающим поворотное движение и поступательное движение по оси поворотного приводного стержня 680. Например, в некоторых вариантах осуществления хирургический инструмент 650 можно функционально соединять при помощи узла стержня 580 с роботизированной хирургической системой, обеспечивающей поворотное движение и поступательное движение по оси поворотного приводного стержня 680, такой как, например, роботизированные хирургические системы, описанные применительно к ФИГ. 5 и 16-21. Например, в некоторых вариантах осуществления хирургический инструмент 650 можно функционально соединять при помощи узла стержня 580 с портативным хирургическим устройством, обеспечивающим поворотное движение и поступательное движение по оси поворотного приводного стержня 680, таким как портативные хирургические устройства, описанные применительно к ФИГ. 46-63. В некоторых вариантах осуществления резьбовой поворотный приводной элемент 654 имеет длину, которая меньше длины поворотного приводного стержня 680, и, следовательно, находится только внутри дистальной части поворотного приводного стержня 680.
Резьбовой поворотный приводной элемент 654 и поворотный приводной стержень 680 являются гибкими, в результате чего части резьбового поворотного приводного элемента 654 и поворотного приводного стержня 680, размещенные в шарнирном сочленении, могут изгибаться без повреждения или потери функциональности в течение независимого шарнирного поворота хирургического инструмента 650 вокруг шарнирного сочленения. Примеры конфигураций поворотного приводного стержня 680 представлены в настоящем документе применительно к ФИГ. 28-45.
Поворотный приводной стержень 680 содержит поворотную приводную головку 682. Поворотная приводная головка 682 содержит гнездовую шестигранную соединительную часть 684 на дистальной стороне поворотной приводной головки 682, и поворотная приводная головка 682 содержит штифтовую шестигранную соединительную часть 686 на проксимальной стороне поворотной приводной головки 682. Дистальная гнездовая шестигранная соединительная часть 684 поворотной приводной головки 682 выполнена с возможностью механического зацепления со штифтовой шестигранной соединительной частью 657 поворотной приводной гайки 656, которая размещена на проксимальной стороне поворотной приводной гайки 656. Проксимальная штифтовая шестигранная соединительная часть 686 поворотной приводной головки 682 выполнена с возможностью механического зацепления с гнездовой шестигранной соединительной частью 659 корпуса привода концевого эффектора 658.
Как показано на ФИГ. 77 и 78, поворотный приводной стержень 680 показан в крайнем дистальном осевом положении, в котором гнездовая шестигранная соединительная часть 684 поворотной приводной головки 682 механически зацеплена со штифтовой шестигранной соединительной частью 657 поворотной приводной гайки 656. В данной конфигурации поворот поворотного приводного стержня 680 инициирует поворот поворотной приводной гайки 656, которая инициирует поступательное перемещение резьбового поворотного приводного элемента 654, который инициирует поступательное перемещение двутаврового элемента 670. Как показано на ФИГ. 79 и 80, поворотный приводной стержень 680 показан в крайнем проксимальном осевом положении, в котором штифтовая шестигранная соединительная часть 686 поворотной приводной головки 682 находится в механическом зацеплении с гнездовой шестигранной соединительной частью 659 корпуса привода концевого эффектора 658. В данной конфигурации поворот поворотного приводного стержня 680 инициирует поворот головки 578 хирургического инструмента 650 вокруг поворотного соединения, включая поворот концевого эффектора 570 и корпуса привода концевого эффектора 658.
Поворотный приводной стержень 680 содержит шлицевой замок 690. Шлицевой замок 690 соединен с поворотным приводным стержнем 680 при помощи фланцев стержня 685. Шлицевой замок 690 механически ограничен в поступательном перемещении в любом направлении поворотным приводным стержнем 680 и фланцами стержня 685, но шлицевой замок 690 может свободно поворачиваться вокруг поворотного приводного стержня 680. Шлицевой замок 690 содержит шлицы 692, расположенные по окружности внешней поверхности шлицевого замка 690 и ориентированные коаксиально узлу стержня 580. Как показано на ФИГ. 75 и76, шлицевой замок 690 размещен в поворотном соединении, образованном путем соединения корпуса привода концевого эффектора 658 и соединительной трубкой концевого эффектора 660. Корпус привода концевого эффектора 658 содержит шлицевую соединительную часть 694, содержащую шлицы 696, расположенные по окружности внутренней поверхности корпуса привода концевого эффектора 658 и ориентированные коаксиально узлу стержня 580. Соединительная трубка концевого эффектора 660 содержит шлицевую соединительную часть 662, содержащую шлицы 664, расположенные по окружности внутренней поверхности соединительной трубки концевого эффектора 660 и ориентированные коаксиально узлу стержня 580.
Шлицы 692, 696 и 664 шлицевого замка 690, корпуса привода концевого эффектора 658 и соединительной трубки концевого эффектора 660 соответственно выполнены с возможностью механического зацепления друг с другом, когда поворотный приводной стержень 680 находится в крайнем дистальном осевом положении, в котором гнездовая шестигранная соединительная часть 684 поворотной приводной головки 682 механически зацеплена со штифтовой шестигранной соединительной частью 657 поворотной приводной гайки 656 и обеспечивает поворот поворотной приводной гайки656 и поступательное перемещение резьбового поворотного приводного элемента 654 и двутаврового элемента 670 (ФИГ. 77, 78 и 82). Механическое зацепление соответствующих шлицов 692, 696 и 664 фиксирует корпус привода концевого эффектора 658 в определенном положении относительно соединительной трубки концевого эффектора 660, таким образом блокируя поворотное соединение и препятствуя повороту головки 578 хирургического инструмента 650. Поскольку шлицевой замок 690 может свободно поворачиваться вокруг поворотного приводного стержня 680, механическое зацепление соответствующих шлицов 692, 696 и 664 не мешает поворотному приводному стержню 680 активировать поворотную приводную гайку 656, резьбовой поворотный приводной элемент 654 и двутавровый элемент 670.
Когда поворотный приводной стержень 680 находится в крайнем проксимальном осевом положении, в котором штифтовая шестигранная соединительная часть 686 поворотной приводной головки 682 механически зацеплен с гнездовой шестигранной стержневой соединительной частью 659 корпуса привода концевого эффектора 658 для обеспечения поворота головки 578 хирургического инструмента 650, шлицевой замок 690 полностью оттягивается в просвет соединительной трубки концевого эффектора 660, и шлицевой замок 690 полностью расцепляется со шлицевой соединительной частью 694 корпуса привода концевого эффектора 658. (См. ФИГ. 79, 80 и 81). В данной конфигурации шлицы 692 шлицевого замка 690 и шлицы 664 соединительной трубки концевого эффектора 660 полностью зацеплены, а шлицы 692 шлицевого замка 690 и шлицы 696 корпуса привода концевого эффектора 658 полностью расцеплены. Механическое расцепление шлицов 692 шлицевого замка 690 и шлицов 696 корпуса привода концевого эффектора 658, когда поворотный приводной стержень 680 находится в крайнем проксимальном осевом положении, отсоединяет корпус привода концевого эффектора 658 от соединительной трубки концевого эффектора 660, таким образом происходит разблокировка поворотного соединения и осуществляется поворот головки 578 хирургического инструмента 650. Поскольку шлицевой замок 690 может свободно поворачиваться вокруг поворотного приводного стержня 680, механическое зацепление шлицов 692 шлицевого замка 690 и шлицов 664 соединительной трубки концевого эффектора 660 не мешает поворотному приводному стержню 680 инициировать поворот головки 578 хирургического инструмента 650.
Механизм блокировки головки 590 препятствует повороту головки 578 хирургического инструмента 650, когда поворотный приводной стержень 680 находится в крайнем дистальном осевом положении, и зацепляет поворотную приводную гайку 656, чтобы активировать закрывающий механизм для браншей и/или механизм поступательного перемещения двутаврового элемента, как описано выше (ФИГ. 77, 78, и 82). Механизм блокировки головки 590 обеспечивает свободный поворот головки 578 хирургического инструмента 650, когда поворотный приводной стержень 680 находится в крайнем проксимальном осевом положении, зацепляя соединительную часть 659 корпуса привода концевого эффектора 658, чтобы инициировать поворот головки, как описано выше (ФИГ. 79, 80, и 81).
Например, как показано на ФИГ. 77 и 78, поворот поворотного приводного стержня 680 инициирует поворот поворотной приводной гайки 656, которая инициирует дистальное или проксимальное поступательное перемещение резьбового поворотного приводного элемента 654 (в зависимости от направления поворота поворотного приводного стержня 680), что инициирует дистальное или проксимальное поступательное перемещение двутаврового элемента 670, что инициирует закрытие и открытие узла браншей 575 и осуществление дистального или проксимального тактов рассечения двутавровым элементом 670/режущим элементом 675. Одновременно шлицевой замок 690 зацепляет как корпус привода концевого эффектора 658, так и соединительную трубку концевого эффектора 660, предотвращая ненужный поворот головки.
Например, как показано на ФИГ. 79 и 80, поворот поворотного приводного стержня 680 инициирует поворот корпуса привода концевого эффектора 658, который инициирует поворот концевого эффектора 570. Одновременно шлицевой замок 690 расцепляет корпус привода концевого эффектора 658 и не препятствует повороту головки. Таким образом, поворотный приводной стержень 680 можно использовать для независимой активации открытия и закрытия узла браншей 575, проксимально дистального такта рассечения двутавровым элементом 670/режущим элементом 675 и поворота головки 578 хирургического инструмента 650
В различных вариантах осуществления концевой эффектор, такой как концевые эффекторы 550 и 570, показанные на ФИГ. 64-82, может содержать первый и второй элементы бранши, которые содержат первую и вторую дистальные текстурированные части соответственно. Первая и вторая дистальные текстурированные части первого и второго элементов бранши концевого эффектора могут быть расположены напротив друг друга и могут обеспечивать концевому эффектору, кроме возможности захвата ткани, например, в течение операций по рассечению, возможность захвата хирургических инструментов, например, игл для сшивания ткани, их пропускания и/или манипулирования ими. В некоторых вариантах осуществления дистальные текстурированные части также могут представлять собой электроды, например, выполненные с возможностью подачи РЧ-энергии на ткань в течение операций по рассечению. Данная функциональность захвата, пропускания, манипулирования и/или рассечения описана, например, применительно к ФИГ. 153-168.
В различных вариантах осуществления концевой эффектор, такой как концевые эффекторы 550 и 570, показанные на ФИГ. 64-82, может содержать первый и второй элементы бранши, которые содержат первую и вторую захватные части, расположенные на обращенных наружу поверхностях первого и второго элементов бранши. Первая и вторая захватные части первого и второго элементов бранши концевого эффектора могут способствовать рассечению ткани, как описано, например, применительно к ФИГ. 116-131.
В различных вариантах осуществления концевой эффектор, такой как концевые эффекторы 550 и 570, показанные на ФИГ. 64-82, может содержать по меньшей мере один электрод, расположенный по меньшей мере на одной контактирующей с тканью поверхности по меньшей мере одного элемента бранши. Электроды, например, могут быть выполнены с возможностью подачи РЧ-энергии на ткань, зажатую между элементами бранши, находящимися в закрытом положении, для соединения/спайки ткани, которая в некоторых вариантах осуществления также может рассекаться путем поступательного перемещения двутаврового элемента, содержащего режущий элемент. В некоторых вариантах осуществления второй элемент бранши также может содержать смещенный электрод, размещенный на дистальном кончике элемента бранши, причем электрод выполнен с возможностью подачи РЧ-энергии на ткань, например, в течение операций по рассечению. Такая функциональность электрода описана, например, применительно к ФИГ. 153-168.
В различных вариантах осуществления концевой эффектор, такой как концевые эффекторы 550 и 570, показанные на ФИГ. 64-82, может содержать элементы бранши, содержащие наклоненные контактирующие с тканью поверхности, как описано, например, применительно к ФИГ. 132-142.
Как показано на ФИГ. 83-91, многоосевой шарнирный и поворотный хирургический инструмент 1200 содержит концевой эффектор 1202, включающий узел браншей 1211, содержащий первый элемент бранши 1204 и второй элемент бранши 1206. Первый элемент бранши 1204 выполнен с возможностью перемещения относительно второго элемента бранши 1206 между открытым положением и закрытым положением с зажатием ткани между первым элементом бранши 1204 и вторым элементом бранши 1206. Хирургический инструмент 1200 выполнен с возможностью независимого шарнирного поворота вокруг шарнирного сочленения 1208. Как описано выше, хирургический инструмент 1200 также выполнен с возможностью независимого поворота вокруг поворотного соединения головки 1210. Как преимущественно показано на ФИГ. 83, концевой эффектор 1202 дополнительно содержит проксимальную стержневую часть 1212.
Концевой эффектор 1202 соединен с узлом стержня 1214, содержащим корпус привода концевого эффектора 1216, соединительную трубку концевого эффектора 1218, сегмент промежуточной шарнирной трубки 1220 и дистальную часть внешней трубки (не показаны на ФИГ. 83-91). Концевой эффектор 1202 и узел стержня 1214 вместе могут образовывать хирургический инструмент 1200. Концевой эффектор 1202 можно съемно соединить с корпусом привода концевого эффектора 1216 с использованием механизма, описанного, например, применительно к ФИГ. 106-115. Соединительная трубка концевого эффектора 1218 содержит цилиндрическую часть 1222 и шаровую часть 1224. Корпус привода концевого эффектора 1216 соединен с цилиндрической частью 1222 соединительной трубки концевого эффектора 1218 через поворотное соединение головки 1210. Концевой эффектор 1202 и корпус концевого эффектора 1216 вместе образуют головку хирургического инструмента 1200. Головка хирургического инструмента 1200 может независимо поворачиваться вокруг поворотного соединения головки 1210.
Как преимущественно показано на ФИГ. 85-87, хирургический инструмент 1200 может включать закрывающий механизм 1226 для перемещения первого элемента бранши 1204 относительно второго элемента бранши 1206 между открытым положением (ФИГ. 86) и закрытым положением (ФИГ. 87). Как показано на ФИГ. 83, первый элемент бранши 1204 может включать первые монтажные отверстия 1228, а второй элемент бранши 1206 может включать вторые монтажные отверстия (не показаны на ФИГ. 83-91). Первый элемент бранши 1204 может располагаться относительно второго элемента бранши 1206 таким образом, чтобы шарнирный палец или цапфа (не показан на ФИГ. 83-91) проходил через первые монтажные отверстия 1228 первого элемента бранши 1204 и вторые монтажные отверстия второго элемента бранши 1206, шарнирно соединяя первый элемент бранши 1204 со вторым элементом бранши 1206. Другие подходящие средства для соединения первого элемента бранши 1204 и второго элемента бранши 1206 также входят в объем настоящего описания.
Как показано на ФИГ. 83-91, закрывающий механизм 1226 может представлять собой рычажный механизм, который может содержать первое звено 1230 и второе звено (не показаны на ФИГ. 83-91). Закрывающий механизм 1226 также может содержать закрывающий шкив, например, имеющий форму закрывающей гайки 1232. Закрывающая гайка 1232 (ФИГ. 84) может по меньшей мере частично располагаться внутри корпуса привода концевого эффектора 1216. В процессе применения закрывающая гайка 1232 может поступательно перемещаться по оси между первым положением (ФИГ. 86) и вторым положением (ФИГ. 87) относительно корпуса привода 1216 концевого эффектора и может включать первое плечо 1234 и второе плечо 1236. Как преимущественно показано на ФИГ. 84, первое плечо 1234 и второе плечо 1236 могут дистально выступать из дистальной части 1238 закрывающей гайки 1232, причем первое плечо 1234 может содержать первое отверстие 1240, причем первое плечо 1234 может шарнирно соединяться с первым звеном 1230 первым штифтом 1242, проходящим через первое отверстие 1240. Аналогично второе плечо 1236 может содержать второе отверстие 1244, причем второе плечо 1236 может шарнирно соединяться со вторым звеном вторым штифтом (не показан на ФИГ. 83-91), проходящим через второе отверстие 1244. Первое звено 1230 и второе звено (не показаны на ФИГ. 83-91) также шарнирно соединены с первым элементом бранши 1204 таким образом, что при дистальном продвижении закрывающей гайки 1232 из первого положения (ФИГ. 86) во второе положение (ФИГ. 87) первый элемент бранши 1204 будет поворачиваться относительно второго элемента бранши 1206 к закрытому положению. Соответственно, когда закрывающую гайку 1232 проксимально оттягивают из второго положения (ФИГ. 89) в первое положение (ФИГ. 91), первый элемент бранши 1204 поворачивается относительно второго элемента бранши 1206 к открытому положению. На ФИГ. 85 представлена закрывающая гайка 1232 в первом положении и узел браншей 1211 в открытом положении. На ФИГ. 87 представлена закрывающая гайка 1232 во втором положении и узел браншей 1211 в закрытом положении. Однако поворот закрывающей гайки 1232 относительно корпуса привода концевого эффектора 1316 может быть ограничен фиксирующим элементом, например, упирающимся в корпус привода концевого эффектора 11316.
Как показано на ФИГ. 83-91, хирургический инструмент 1200 может включать пусковой механизм 1246 с подходящим пусковым шкивом. Пусковой механизм 1246 может включать двутавровый элемент 1247, резьбовой приводной элемент 1248 и резьбовую поворотную приводную гайку 1250. Двутавровый элемент 1247 может содержать первый фланец двутаврового элемента 1252 и второй фланец двутаврового элемента 1254. Двутавровый элемент 1247 может работать аналогично описанному выше применительно к перемещаемому по оси элементу 3016, описанному выше в настоящем документе. Например, первый фланец двутаврового элемента 1252 и второй фланец двутаврового элемента 1254 соединены промежуточной частью 1256. Промежуточная часть 1256 двутаврового элемента 1247 может содержать режущий элемент 1258 на своем дистальном или ведущем конце. Двутавровый элемент 1247 выполнен с возможностью поступательного перемещения внутри первого канала 1260 в первом элементе бранши 1204 и внутри второго канала 1262 во втором элементе бранши 1206. На ФИГ. 84 представлен двутавровый элемент 1247, находящийся в крайнем проксимальном положении, и узел браншей 1211, находящийся в открытом положении. Двутавровый элемент 1247 можно дистально поступательно перемещать для рассечения режущим элементом 1258 ткани, зажатой между первым элементом бранши 1204 и вторым элементом бранши 1206 в закрытом положении. Режущий элемент 1258, который может содержать, например, острый край или скальпель, выполнен с возможностью разрезания зажатой ткани в течение дистального поступательного перемещения (пускового такта) двутаврового элемента 1247, в результате чего происходит рассечение ткани. На ФИГ. 88 двутавровый элемент 1247 показан в крайнем дистальном положении после завершения пускового такта.
До, в течение или после продвижения двутаврового элемента 1247 через ткань, зажатую между первым элементом бранши 1204 и вторым элементом бранши 1206, можно подать электрический ток на электроды, размещенные в первом элементе бранши 1204 и/или втором элементе бранши 1206, чтобы соединить/сплавить ткань, как более подробно описано в настоящем документе. Например, электроды могут быть выполнены с возможностью подачи РЧ энергии на ткань, зажатую между первым элементом бранши 1204 и вторым элементом бранши 1206, находящимися в закрытом положении, для соединения/спайки ткани.
Дистальное и проксимальное поступательное перемещение двутаврового элемента 1247 между оттянутым проксимальным положением и продвинутым дистальным положением может осуществляться подходящим пусковым механизмом 1246. Как показано на ФИГ. 83-91, двутавровый элемент 1247 соединен с резьбовым приводным элементом 1248, причем резьбовая поворотная приводная гайка 1250 находится в резьбовом зацеплении с резьбовым приводным элементом 1248. Как преимущественно показано на ФИГ. 83, резьбовая поворотная приводная гайка 1250 расположена внутри корпуса привода концевого эффектора 1216 и проксимальна к закрывающей гайке 1232 между проксимальным кольцевым фланцем 1264 и дистальным кольцевым фланцем 1266. Резьбовая поворотная приводная гайка 1250 механически ограничена в поступательном перемещении в любом направлении, но может поворачиваться внутри корпуса привода концевого эффектора 1216 вокруг центральной оси A. Следовательно, учитывая резьбовое зацепление поворотной приводной гайки 1250 и резьбового приводного элемента 1248, поворотное движение поворотной приводной гайки 1250 преобразуется в поступательное движение резьбового приводного элемента 1248 вдоль центральной оси А и, в свою очередь, в поступательное движение двутаврового элемента 1247 вдоль центральной оси А.
Резьбовой приводной элемент 1248 ввинчен в поворотную приводную гайку 1250 и размещен по меньшей мере частично внутри просвета 1268 поворотного приводного стержня 1270. Резьбовой приводной элемент 1248 не прикреплен к поворотному приводному стержню 1270 и не соединен с ним. В процессе применения резьбовой приводной элемент 1248 может свободно перемещаться внутри просвета поворотного приводного стержня 1270 и будет поступательно перемещаться в просвете поворотного приводного стержня 1270 при приведении в движение посредством поворота поворотной приводной гайки 1250. Поворотный приводной стержень 1270 и резьбовой приводной элемент 1248 образуют концентрический узел поворотного приводного стержня/винта, расположенный в узле стержня 1214. Кроме того, резьбовой приводной элемент 1248 дистально проходит через просвет 1272 закрывающей гайки 1232. Аналогично указанному выше резьбовой приводной элемент 1248 может свободно перемещаться внутри просвета 1272 закрывающей гайки 1232, и, в результате, резьбовой пусковой элемент 1248 будет поступательно перемещаться внутри просвета 1272 закрывающей гайки 1232 при приведении в движение посредством поворота поворотной приводной гайки 1250.
Как показано на ФИГ. 83-91, поворотная приводная гайка 1250 может содержать резьбовую дистальную часть 1274. Закрывающая гайка 1232 может содержать резьбовую проксимальную часть 1276. Резьбовая дистальная часть 1274 поворотной приводной гайки 1250 и резьбовая проксимальная часть 1276 закрывающей гайки 1232 образуют резьбовое зацепление. Как описано выше, резьбовая поворотная приводная гайка 1250 механически ограничена в поступательном перемещении в любом направлении, но может поворачиваться внутри корпуса привода концевого эффектора 1216 вокруг центральной оси A. Следовательно, учитывая резьбовое соединение поворотной приводной гайки 1250 и закрывающей гайки 1232, поворотное движение поворотной приводной гайки 1250 преобразуется в поступательное движение закрывающей гайки 1232 вдоль центральной оси A и в свою очередь в поворотное движение узла браншей 1211.
Как показано на ФИГ. 83, корпус привода концевого эффектора 1216, соединительная трубка концевого эффектора 1218 и сегмент промежуточной шарнирной трубки 1220, которые вместе образуют узел стержня 1214, имеют сквозные просветы, и, следовательно, узел стержня 1214 содержит просвет, проходящий в продольном направлении через них, как показано на ФИГ. 83 и 85-91. Как также представлено на ФИГ. 83 и 85-91, концентрический узел поворотного приводного стержня/резьбового приводного элемента размещен внутри просвета узла стержня 1214 и проходит через корпус привода концевого эффектора 1216, соединительную трубку концевого эффектора 1218 и сегмент промежуточной шарнирной трубки 1220. Хотя это не показано на ФИГ. 83-91, через просвет узла стержня 1214 проходит по меньшей мере поворотный приводной стержень 1270, который функционально соединен с приводным механизмом, обеспечивающим поворотное движение и поступательное движение по оси поворотного приводного стержня 1270. Например, в некоторых вариантах осуществления хирургический инструмент 1200 можно функционально соединять при помощи узла стержня 1214 с роботизированной хирургической системой, обеспечивающей поворотное движение и поступательное движение по оси поворотного приводного стержня 1270, такой как, например, роботизированные хирургические системы, описанные применительно к ФИГ. 5 и 16-21. Например, поворотный приводной стержень 1270 может соединяться через узел стержня с проксимальным сегментом приводного стержня 380, описанным выше в настоящем документе. Например, в некоторых вариантах осуществления хирургический инструмент 1200 может функционально соединяться через узел стержня 1214 с поворотным хирургическим устройством, таким как устройство, описанное выше в настоящем документе применительно к ФИГ. 46-63. Например, поворотный приводной стержень 1270 может функционально соединяться через узел стержня 560 с проксимальным сегментом приводного стержня 380', описанным выше в настоящем документе.
В некоторых вариантах осуществления резьбовой поворотный приводной элемент 1248, например, имеет длину, которая меньше длины поворотного приводного стержня 1270, и, следовательно, находится только внутри дистальной части поворотного приводного стержня 1270. Резьбовой приводной элемент 1248 и поворотный приводной стержень 1270 могут быть гибкими, в результате чего резьбовой приводной элемент 1248 и поворотный приводной стержень 1270 могут изгибаться без повреждения или потери функциональности в течение шарнирного поворота хирургического инструмента 1200 вокруг шарнирного сочленения 1208.
Как более подробно описано в других разделах настоящего описания, поворотный приводной стержень 1270 может содержать поворотную приводную головку 1278. Поворотная приводная головка 1278 содержит гнездовую шестигранную соединительную часть 1280 на дистальной стороне поворотной приводной головки 1278, и поворотная приводная головка 1278 содержит штифтовую шестигранную соединительную часть 1282 на проксимальной стороне поворотной приводной головки 1278. Дистальная гнездовая шестигранная соединительная часть 1280 поворотной приводной головки 1278 выполнена с возможностью механического зацепления со штифтовой шестигранной соединительной частью 1284 поворотной приводной гайки 1250, размещенной на проксимальной стороне поворотной приводной гайки 1250. Как описано в других разделах, проксимальная штифтовая шестигранная соединительная часть 1282 поворотной приводной головки 1278 выполнена с возможностью механического зацепления с гнездовой шестигранной соединительной частью 1286 корпуса привода концевого эффектора 1216 для поворота концевого эффектора 1202 вокруг центральной оси А.
Как показано на ФИГ. 85, поворотный приводной стержень 1270 показан в крайнем проксимальном осевом положении, в котором шестигранная соединительная часть 1282 поворотной приводной головки 1278 механически зацеплена с гнездовой шестигранной соединительной частью корпуса привода концевого эффектора 1216. В данной конфигурации поворот поворотного приводного стержня 1270 вызывает поворот головки хирургического инструмента 1200 вокруг поворотного соединения головки 1210, включая поворот концевого эффектора 1202 и корпуса привода концевого эффектора 1216. В данной конфигурации часть хирургического инструмента 1200, дистальная к поворотному соединению головки 1210 (например, части головки), поворачивается с поворотом поворотного приводного стержня 1270, а часть хирургического инструмента 1200, проксимальная к поворотному соединению головки 1210, не поворачивается с поворотом поворотного приводного стержня 1270. Пример поворотного соединения головки 1210 описан применительно к ФИГ. 64-82, 83-91 и 92-96. Другие подходящие методики и средства для поворота концевого эффектора 1202 относительно узла стержня 1214 входят в объем настоящего описания. Следует понимать, что желательная скорость поворота поворотного приводного стержня 1270 для работы поворотной приводной гайки 1250 может быть больше желательной скорости поворота головки. Например, поворотный приводной стержень 1270 может приводиться в движение двигателем (не показан), способным развивать разные скорости поворота.
Резьба резьбового приводного элемента 1248 и поворотной приводной гайки 1250 может быть ориентирована таким образом, чтобы дистальное или проксимальное поступательное перемещение резьбового приводного элемента 1248 и двутаврового элемента 1247 вызывало поворот поворотного приводного стержня 1270 по часовой стрелке или против часовой стрелки. Иными словами, поворотный приводной стержень 1270 и поворотная приводная гайка 1250 могут поворачиваться в первом направлении для продвижения резьбового приводного элемента 1248 в дистальном направлении и, соответственно, могут поворачиваться во втором, противоположном, направлении, для проксимального оттягивания резьбового приводного элемента 1248. Шаг и/или количество ниток резьбы резьбового приводного элемента 1248 и резьбы поворотной приводной гайки 1250 можно выбирать так, чтобы управлять скоростью и/или продолжительностью поворота поворотной приводной гайки 1250 и, в свою очередь, поступательным перемещением резьбового приводного элемента 1248. Таким образом, можно контролировать направление, скорость и продолжительность поворота поворотного приводного стержня 1270, управляя направлением, скоростью и величиной продольного поступательного перемещения двутаврового элемента 1247 вдоль первого канала 1260 и второго канала 1262, как описано выше.
Аналогично указанному выше ориентацию резьбы резьбовой дистальной части 1274 поворотной приводной гайки 1250 и резьбы резьбовой проксимальной части 1276 закрывающей гайки 1232 можно выбрать таким образом, чтобы поворот поворотного приводного стержня 1270 по часовой стрелке или против часовой стрелки вызывал дистальное или проксимальное поступательное перемещение закрывающей гайки 1232 и, в свою очередь, закрытие или открытие узла браншей 1211. Иными словами, резьбовая дистальная часть 1274 может поворачиваться в первом направлении для дистального продвижения резьбовой проксимальной части 1276 и, соответственно, поворачиваться во втором, противоположном, направлении, для проксимального оттягивания резьбовой проксимальной части 1276. Шаг и/или количество витков резьбы резьбовой дистальной части 1274 резьбового приводного элемента 1248 и резьбы резьбовой проксимальной части 1276 закрывающей гайки 1232 можно выбирать так, чтобы управлять скоростью и/или продолжительностью поворота поворотной приводной гайки 1250 и поступательным перемещением закрывающей гайки 1232. Таким образом, можно контролировать направление, скорость и продолжительность поворота поворотного приводного стержня 1270, управляя направлением, скоростью и величиной поворота узла браншей 1211.
Как показано на ФИГ. 86-88, поворотный приводной стержень 1270 показан в полностью выдвинутом дистальном осевом положении, в котором гнездовая шестигранная соединительная часть 1280 поворотной приводной головки 1278 механически зацепляет штифтовую шестигранную соединительную часть 1284 поворотной приводной гайки 1250. В данной конфигурации поворот поворотного приводного стержня 1270 в первом направлении (например, по часовой стрелке) вокруг центральной оси A начинает пусковой такт, вызывая поворот поворотной приводной гайки 1250 в первом направлении. Поворот поворотной приводной гайки приводит к продвижению резьбового приводного элемента 1248, который в свою очередь дистально продвигает двутавровый элемент 1247. Одновременно поворот поворотной приводной гайки 1250 дистально продвигает закрывающую гайку 1232, в результате чего закрывается узел браншей 1211. Закрывающая гайка 1232 и резьбовой приводной элемент 1248 дистально продвигаются до тех пор, пока закрывающая гайка 1232 не расцепится из резьбового зацепления с поворотной приводной гайкой 1250, как показано на ФИГ. 88. Иными словами, закрывающую гайку 1232 можно дистально продвигать до тех пор, пока нитки резьбы резьбовой дистальной части 1274 поворотной приводной гайки 1250 более не будут зацеплены за счет резьбы с нитками резьбы резьбовой проксимальной части 1276 закрывающей гайки 1232. Таким образом, дополнительный поворот поворотной приводной гайки 1250 в первом направлении более не будет приводить к дистальному продвижению закрывающей гайки 1232. В течение оставшейся части пускового такта закрывающая гайка 1232 не будет работать. Дополнительный поворот поворотной приводной гайки 1250 в том же направлении продолжит дистальное продвижение резьбового приводного элемента 1248, который продолжит дистальное продвижение двутаврового элемента 1247 в течение оставшейся части пускового такта.
Хирургический инструмент 1200 может содержать смещающий элемент 1288, например, спиральную пружину и/или пружинную шайбу, расположенный по меньшей мере частично вокруг резьбовой дистальной части 1274 поворотной приводной гайки 1250. Как показано на ФИГ. 86, смещающий элемент 1288 может включать проксимальный конец, упирающийся в дистальный кольцевой фланец 1266 корпуса привода концевого эффектора 1216, и дистальный конец, упирающийся в проксимальный конец 1290 закрывающей гайки 1232. После того как закрывающая гайка 1232 выйдет из резьбового зацепления с поворотной приводной гайкой 1250, смещающий элемент 1288 может не позволять закрывающей гайке 1232 повторно зацепляться с поворотной приводной гайкой 1250, толкая закрывающую гайку 1232 дистально по оси вдоль центральной оси A, пока дистальная часть 1238 закрывающей гайки 1232 не упрется в пограничную стенку 1294 проксимальной стержневой части 1212 концевого эффектора 1202. Смещающий элемент 1288 также гарантирует, что узел браншей 1211 останется под положительным закрывающим давлением, обеспечиваемым прижиманием закрывающей гайки 1232 к пограничной стенке 1294 проксимальной стержневой части 1212 концевого эффектора 1202 по мере дистального продвижения двутаврового элемента 1247 через закрытый узел браншей 1211.
Как преимущественно показано на ФИГ. 84, закрывающая гайка 1232 может содержать кулачковый элемент 1296, дистально проходящий от закрывающей гайки 1232. Как преимущественно показано на ФИГ. 87, кулачковый элемент 1296 может проходить через отверстие 1298 в пограничной стенке 1294 проксимальной стержневой части 1212 концевого эффектора 1202, когда дистальная часть 1238 закрывающей гайки 1232 упирается в пограничную стенку 1294 проксимальной стержневой части 1212 концевого эффектора 1202 под положительным давлением, обеспечиваемым смещающим элементом 1288.
Как показано на ФИГ. 88, поворотный приводной стержень 1270 показан в полностью выдвинутом дистальном осевом положении, в котором гнездовая шестигранная соединительная часть 1280 поворотной приводной головки 1278 механически зацепляет штифтовую шестигранную соединительную часть 1284 поворотной приводной гайки 1250. В данной конфигурации поворот поворотного приводного стержня 1270 во втором направлении, противоположном первому направлению (например, против часовой стрелки), начинает обратный такт, вызывая поворот в противоположном направлении поворотной приводной гайки 1250, которая оттягивает резьбовой приводной элемент 1248, который в свою очередь оттягивает двутавровый элемент 1247. По меньшей мере в течение исходной фазы обратного такта закрывающая гайка 1232 расцепляется с поворотной приводной гайкой 1250. Однако по мере оттягивания двутаврового элемента 1247 данный двутавровый элемент 1247 может зацеплять кулачковый элемент 1296 закрывающей гайки 1232. Дополнительное оттягивание двутаврового элемента 1247 может одновременно открывать узел браншей 1211, толкая закрывающую гайку 1232 проксимально вдоль оси A к поворотной приводной гайке 1250. Чтобы двутавровый элемент 1247 мог толкнуть закрывающую гайку 1232 в проксимальном направлении, двутавровый элемент 1247 должен сжать смещающий элемент 1288. По мере оттягивания двутаврового элемента 1247 двутавровый элемент 1247 может проксимально толкать закрывающую гайку 1232 до тех пор, пока закрывающая гайка не вернется в резьбовое зацепление с поворотной приводной гайкой 1250. В данный момент поворотная приводная гайка 1250 может начать тянуть закрывающую гайку 1232 в проксимальном направлении из-за возникшего между ними резьбового зацепления. По мере проксимального оттягивания закрывающей гайки 1232 первое звено 1230 и второе звено вызывают открытие узла браншей 1211. Оттягивание двутаврового элемента 1247 и открытие узла браншей 1211 продолжаются одновременно в течение оставшейся части обратного такта.
Последовательность событий, вызывающих закрытие узла браншей 1211, полное продвижение двутаврового элемента 1247, полное оттягивание двутаврового элемента 1247 и открытие узла браншей 1211, представлена в хронологическом порядке на ФИГ. 85-91. На ФИГ. 85 показан узел браншей 1211 в полностью открытом положении, двутавровый элемент 1247 в полностью оттянутом положении и поворотный приводной стержень 1270 в полностью оттянутом положении по оси, причем гнездовая шестигранная соединительная часть 1280 поворотной приводной головки 1278 расцеплена со штифтовой шестигранной соединительной частью 1284 поворотной приводной гайки 1250. Как также показано на ФИГ. 86, в первой фазе эксплуатации поворотный приводной стержень 1270 продвигается по оси, механически зацепляя гнездовую шестигранную соединительную часть 1280 поворотной приводной головки 1278 со штифтовой шестигранной соединительной частью 1284 поворотной приводной гайки 1250. Как также показано на ФИГ. 86, поворот поворотного приводного стержня 1270 в первом направлении (например, по часовой стрелке) вокруг центральной оси A вызывает поворот поворотной приводной гайки 1250 в первом направлении. Закрывающая гайка 1232 и резьбовой приводной элемент 1248 одновременно дистально продвигаются в результате поворота поворотной приводной гайки 1250 в первом направлении. В свою очередь закрытие узла браншей 1211 и исходное продвижение двутаврового элемента 1247 происходят одновременно в течение первой фазы эксплуатации. Во второй фазе эксплуатации, как показано на ФИГ. 87, закрывающая гайка 1232 расцеплена из резьбового зацепления с поворотной приводной гайкой 1250. В течение оставшейся части второй фазы эксплуатации поворотная приводная гайка 1250 продолжает продвигать резьбовой приводной элемент 1248 независимо от закрывающей гайки 1232. Таким образом, как преимущественно показано на ФИГ. 88, узел браншей 1211 остается закрытым, а двутавровый элемент 1247 продолжает продвигаться до конца второй фазы эксплуатации.
В третьей фазе эксплуатации, как показано на ФИГ. 89, поворотный приводной стержень 1270 поворачивается во втором направлении, противоположном первому направлению, что вызывает поворот поворотной приводной гайки 1250 во втором направлении. В третьей фазе эксплуатации закрывающая гайка 1232 расцепляется с поворотной приводной гайкой 1250. Поворот поворотной приводной гайки 1250 оттягивает резьбовой приводной элемент 1248 независимо от закрывающей гайки 1232. Таким образом, узел браншей 1211 остается закрытым, а двутавровый элемент 1247 оттягивается под воздействием поворота поворотного привода. В четвертой фазе эксплуатации, как преимущественно показано на ФИГ. 90, поворотная приводная гайка 1250 продолжает поворот во втором направлении, тем самым оттягивая резьбовой приводной элемент 1248, который оттягивает двутавровый элемент 1247 до тех пор, пока двутавровый элемент 1247 не зацепит кулачковый элемент 1296 закрывающей гайки 1232. Дополнительное оттягивание двутаврового элемента 1247 может одновременно открывать узел браншей 1211, проксимально толкая закрывающую гайку 1232 по оси A к поворотной приводной гайке 1250, сжимая смещающий элемент 1288. Как преимущественно показано на ФИГ. 91, двутавровый элемент 1247 может продолжать проксимально толкать закрывающую гайку 1232 до тех пор, пока не возникнет резьбовое зацепление между закрывающей гайкой и поворотной приводной гайкой 1250. Оттягивание двутаврового элемента 1247 и открытие узла браншей 1211 продолжаются одновременно в течение оставшейся части четвертой фазы эксплуатации.
Как показано на ФИГ. 92-96, многоосевой шарнирный и поворотный хирургический инструмент 1300 содержит концевой эффектор 1302, включающий узел браншей 1311, содержащий первый элемент бранши 1304 и второй элемент бранши 1306. Первый элемент бранши 1304 выполнен с возможностью перемещения относительно второго элемента бранши 1306 между открытым положением и закрытым положением с зажатием ткани между первым элементом бранши 1304 и вторым элементом бранши 1306. Хирургический инструмент 1300 выполнен с возможностью независимо шарнирно поворачиваться вокруг шарнирного сочленения 1308. Как описано выше, хирургический инструмент 1300 также выполнен с возможностью независимо поворачиваться вокруг поворотного соединения головки 1310.
Концевой эффектор 1302 соединен с узлом стержня 1314, содержащим корпус привода концевого эффектора 1316, соединительную трубку концевого эффектора 1318, сегмент промежуточной шарнирной трубки 1320 и дистальную часть внешней трубки (не показаны на ФИГ. 92-96). Концевой эффектор 1302 и узел стержня 1314 вместе могут образовывать хирургический инструмент 1300. Концевой эффектор 1302 можно съемно соединить с корпусом привода концевого эффектора 1316 с использованием механизма, описанного, например, применительно к ФИГ. 106-115. Соединительная трубка концевого эффектора 1318 содержит цилиндрическую часть 1322 и шаровую часть 1324. Корпус привода концевого эффектора 1316 соединен с цилиндрической частью 1322 соединительной трубки концевого эффектора 1318 через поворотное соединение головки 1310. Концевой эффектор 1302 и корпус концевого эффектора 1316 вместе образуют головку хирургического инструмента 1300. Головка хирургического инструмента 1300 может независимо поворачиваться вокруг поворотного соединения головки 1310.
Как преимущественно показано на ФИГ. 92, хирургический инструмент 1300 может включать закрывающий механизм 1326 для перемещения первого элемента бранши 1304 относительно второго элемента бранши 1306 между открытым положением (ФИГ. 93) и закрытым положением (ФИГ. 94). Как показано на ФИГ. 83, первый элемент бранши 1304 может включать первые монтажные отверстия 1328, а второй элемент бранши 1306 может включать вторые монтажные отверстия (не показаны на ФИГ. 92-96). Первый элемент бранши 1304 может располагаться относительно второго элемента бранши 1306 таким образом, чтобы шарнирный палец или цапфа (не показан на ФИГ. 92-96) проходил через первые монтажные отверстия 1328 первого элемента бранши 1304 и вторые монтажные отверстия второго элемента бранши 1306, шарнирно соединяя первый элемент бранши 1304 со вторым элементом бранши 1306. Другие подходящие средства для соединения первого элемента бранши 1304 и второго элемента бранши 1306 входят в объем настоящего описания.
Как показано на ФИГ. 92-96, закрывающий механизм может содержать закрывающее звено 1330, которое поступательно перемещается в осевом направлении относительно корпуса привода концевого эффектора 1316 между первым положением и вторым положением. Закрывающее звено 1330 может содержать дистальный конец 1332 и проксимальный конец 1334. Дистальный конец 1332 может шарнирно соединяться с проксимальной частью 1336 первого элемента бранши 1304 таким образом, что при поступательном перемещении закрывающего звена 1330 между первым положением и вторым положением первый элемент бранши 1304 перемещается относительно второго элемента бранши 1306 между открытым и закрытым положением.
Как показано на ФИГ. 92-96, закрывающий механизм 1328 также может содержать закрывающий шкив, например, в форме цилиндрического кулачка 1338. Цилиндрический кулачок 1338 может быть расположен внутри корпуса привода концевого эффектора 1316. Цилиндрический кулачок 1338 может иметь по существу цилиндрическую форму с просветом 1340 через него. Цилиндрический кулачок 1338 может включать первый дугообразный желоб 1346 и второй дугообразный желоб 1348, которые выполнены в его периферической поверхности. Первый дугообразный желоб 1346 может приниматься в первый штифт 1350, проходящий от корпуса привода концевого эффектора 1316. Второй дугообразный желоб 1348 может приниматься во второй штифт (не показан на ФИГ. 92-96), проходящий от корпуса привода концевого эффектора 1316. Первый штифт 1350 и второй штифт (не показан на ФИГ. 92-96) могут отходить от противоположных сторон окружности внутренней стенки корпуса привода концевого эффектора 1316. Цилиндрический кулачок 1338 может поворачиваться вокруг центральной оси A, причем при повороте цилиндрического кулачка 1338 вокруг центральной оси A первый штифт 1350 проходит вдоль первого дугообразного желоба 1346, а второй штифт проходит вдоль второго дугообразного желоба 1348, тем самым поступательно перемещая цилиндрический кулачок 1338 вдоль центральной оси A. В результате поворотное движение цилиндрического кулачка 1338 преобразуется в осевое движение закрывающего звена 1330. Иными словами, поворот цилиндрического кулачка 1338 в первом направлении (например, по часовой стрелке) вокруг центральной оси A может приводить к продвижению цилиндрического кулачка 1338 по оси в дистальном направлении. Соответственно, поворот цилиндрического кулачка 1338 во втором направлении, противоположном первому направлению (например, против часовой стрелки), может приводить к оттягиванию цилиндрического кулачка 1338 проксимально по оси вдоль центральной оси А.
Как показано на ФИГ. 92-96, проксимальный конец 1334 закрывающего звена 1330 может функционально зацепляться с цилиндрическим кулачком 1338 таким образом, что продвижение цилиндрического кулачка 1338 по оси может вызывать перемещение закрывающего звена 1330 по оси и в свою очередь закрытие узла браншей 1311. Аналогично проксимальное оттягивание цилиндрического кулачка 1338 может приводить к оттягиванию закрывающего звена 1330, в результате чего может открываться узел браншей 1311. Как показано на ФИГ. 92-96, цилиндрический кулачок 1338 может включать продольную выемку 1354 на внешней стенке в дистальной части цилиндрического кулачка 1338. Проксимальный конец закрывающего звена 1330 может содержать соединительный элемент 1356. Соединительный элемент 1356 может функционально зацепляться с цилиндрическим кулачком 1338 вдоль выемки 1354. В результате, цилиндрический кулачок 1338 может поступательно передавать движения по оси на закрывающее звено 1330 через соединительный элемент 1356.
Как преимущественно показано на ФИГ. 92, хирургический инструмент 1300 может включать пусковой механизм 1358. Пусковой механизм 1358 может включать двутавровый элемент 1360, резьбовой приводной элемент 1362 и резьбовую поворотную приводную гайку 1364. Двутавровый элемент 1360 может функционировать аналогично элементу 3016, выполненному с возможностью перемещения по оси, описанному выше в настоящем документе, и может содержать первый фланец двутаврового элемента 1367 и второй фланец двутаврового элемента 1368. Первый фланец двутаврового элемента 1367 и второй фланец двутаврового элемента 1368 соединены промежуточной частью 1370. Промежуточная часть 1370 двутаврового элемента 1360 может содержать режущий элемент 1372, который может содержать, например, острый край или лезвие, способное рассекать ткань, зажатую между первым элементом бранши 1304 и вторым элементом бранши 1306, когда узел браншей 1311 находится в закрытом положении. Двутавровый элемент 1360 может поступательно дистально перемещаться внутри первого канала (не показан на ФИГ. 92-96), выполненного в первом элементе бранши 1304, и внутри второго канала 1376, выполненного во втором элементе бранши 1306, разрезая захваченную ткань в течение такта дистального поступательного перемещения (пускового такта). На ФИГ. 96 двутавровый элемент 1360 показан после завершения пускового такта.
До, в течение или после продвижения двутаврового элемента 1360 через ткань, зажатую между первым элементом бранши 1304 и вторым элементом бранши 1306, можно подать электрический ток на электроды 1378, размещенные в первом элементе бранши 1304 и/или втором элементе бранши 1306, чтобы соединить/сплавить ткань, как более подробно описано в настоящем документе. Например, электроды 1378 могут быть выполнены с возможностью подачи РЧ-энергии на ткань, зажатую между первым элементом бранши 1304 и вторым элементом бранши 1306, находящимися в закрытом положении, для соединения/спайки ткани.
Дистальное и проксимальное поступательное перемещение двутаврового элемента 1360 между проксимально оттянутым положением и дистально продвинутым положением может осуществляться подходящим пусковым механизмом 1358. Как показано на ФИГ. 92-96, двутавровый элемент 1360 соединен с резьбовым приводным элементом 1362, причем резьбовой приводной элемент 1362 за счет резьбы зацеплен с поворотной приводной гайкой 1364. Резьбовая поворотная приводная гайка 1364 расположена внутри корпуса привода концевого эффектора 1316, дистально к цилиндрическому кулачку 1338, между проксимальным кольцевым фланцем 1339A и дистальным кольцевым фланцем 1339B. Резьбовая поворотная приводная гайка 1364 механически ограничена в поступательном перемещении в любом направлении, но может поворачиваться внутри корпуса привода концевого эффектора 1316. Следовательно, учитывая резьбовое зацепление поворотной приводной гайки 1364 и резьбового приводного элемента 1362, поворотное движение поворотной приводной гайки 1364 преобразуется в поступательное движение резьбового приводного элемента 1362 вдоль центральной оси А и, в свою очередь, в поступательное движение двутаврового элемента 1360 вдоль центральной оси А.
Резьбовой приводной элемент 1362 ввинчен в поворотную приводную гайку 1364 и по меньшей мере частично размещен внутри просвета 1381 поворотного приводного стержня 1382. Резьбовой приводной элемент 1362 не прикреплен к поворотному приводному стержню 1382 и не соединен с ним. Резьбовой приводной элемент 1362 может свободно перемещаться внутри просвета 1381 поворотного приводного стержня 1382 и будет поступательно перемещаться в просвете 1381 поворотного приводного стержня 1382 при приведении в движение посредством поворота поворотной приводной гайки 1364. Поворотный приводной стержень 1382 и резьбовой приводной элемент 1362 образуют концентрический узел поворотного приводного стержня/резьбового приводного элемента, размещенный в узле стержня 1314. Кроме того, резьбовой приводной элемент 1362 проходит дистально через просвет 1384 цилиндрического кулачка 1338, причем резьбовой приводной элемент 1362 может свободно перемещаться внутри просвета 1384 цилиндрического кулачка 1338 и будет поступательно перемещаться внутри просвета 1384 цилиндрического кулачка 1338 при приведении резьбового приводного элемента в движение посредством поворота поворотной приводной гайки 1364.
Как показано на ФИГ. 92, корпус привода концевого эффектора 1316, соединительная трубка концевого эффектора 1318 и сегмент промежуточной шарнирной трубки 1320, которые вместе образуют узел стержня 1314, имеют просветы, проходящие через них. В результате узел стержня 1314 может иметь просвет, проходящий через него, как показано на ФИГ. 92-96. Как также показано на ФИГ. 92-96, концентрический узел поворотного приводного стержня/резьбового приводного элемента размещен в просвете узла стержня 1314 и проходит через корпус привода концевого эффектора 1316, соединительную трубку концевого эффектора 1318 и сегмент промежуточной шарнирной трубки 1320. Хотя это не показано на ФИГ. 92-96, через просвет узла стержня 1314 проходит по меньшей мере поворотный приводной стержень 1382, который функционально соединен с приводным механизмом, обеспечивающим поворотное и/или продольное поступательное движение поворотного приводного стержня 1382. Например, в некоторых вариантах осуществления хирургический инструмент 1300 можно функционально соединять при помощи узла стержня 1314 к роботизированной хирургической системе, обеспечивающей поворотное движение и/или осевое поступательное движение поворотного приводного стержня 1382, например, к роботизированным хирургическим системам, описанным применительно к ФИГ. 5 и 16-21. Например, поворотный приводной стержень 1382 может функционально соединяться через узел стержня 1314 с проксимальным сегментом приводного стержня 380, описанным выше в настоящем документе. Также, в некоторых вариантах осуществления хирургический инструмент 1300 можно использовать в сочетании с портативным хирургическим устройством, например, устройством, описанным выше в настоящем документе применительно к ФИГ. 46-63. Например, поворотный приводной стержень 1382 может функционально соединяться через узел стержня 1314 с проксимальным сегментом приводного стержня 380', описанным выше в настоящем документе.
В некоторых вариантах осуществления резьбовой поворотный приводной элемент 1362, например, имеет длину, которая меньше длины поворотного приводного стержня 1382, и, следовательно, находится внутри лишь дистальной части поворотного приводного стержня 1382. Резьбовой приводной элемент 1362 и поворотный приводной стержень 1382 могут быть гибкими, в результате чего резьбовой приводной элемент 1362 и поворотный приводной стержень 1382 могут изгибаться без повреждения или потери функциональности в течение шарнирного поворота хирургического инструмента 1300 вокруг шарнирного сочленения 1308.
Поворотный приводной стержень 1382 может содержать поворотную приводную головку 1386. Поворотная приводная головка 1386 может содержать элементы шлицы 1388, расположенные по окружности внешней поверхности поворотной приводной головки 1386 и ориентированные коаксиально узлу стержня 1314. Корпус привода концевого эффектора 1316 может содержать шлицевую соединительную часть 1390, содержащую шлицы 1392, расположенные по окружности на внутренней стенке корпуса привода концевого эффектора 1316 и ориентированные коаксиально узлу стержня 1314. Цилиндрический кулачок 1338 может содержать шлицевую соединительную часть 1394, содержащую шлицы 1396, расположенные по окружности на внутренней стенке цилиндрического кулачка 1338 и ориентированные коаксиально узлу стержня 1314. Поворотная приводная гайка 1364 может также содержать шлицевую соединительную часть 1397, содержащую шлицы 1398, расположенные по окружности на внутренней стенке поворотной приводной гайки 1364 и ориентированные коаксиально узлу стержня 1314. Как показано на ФИГ.93, поворотный приводной стержень 1382 можно избирательно оттягивать проксимально, в результате чего поворотная приводная головка 1386 функционально зацепляет шлицевую соединительную часть 1390 корпуса привода концевого эффектора 1316. В данной конфигурации поворот поворотного приводного стержня 1382 вызывает поворот головки хирургического инструмента 1300 вокруг поворотного соединения головки 1310, включая поворот концевого эффектора 1302 и корпуса привода концевого эффектора 1316. В данной конфигурации часть хирургического инструмента 1300, дистальная к поворотному соединению головки 1310, поворачивается вместе с поворотным приводным стержнем 1382, а часть хирургического инструмента 1300, проксимальная к поворотному соединению головки 1310, не поворачивается вместе с поворотным приводным стержнем 1382. Пример поворотного соединения головки 1310 описан применительно к ФИГ. 64-82, 83-91 и 92-96. Другие подходящие методики и средства для поворота концевого эффектора 1302 относительно узла стержня 1314 входят в объем настоящего описания. Следует понимать, что желательная скорость поворота поворотного приводного стержня 1382 для работы поворотной приводной гайки 1364 может быть больше желательной скорости поворота головки. Например, поворотный приводной стержень 1270 может приводиться в движение двигателем (не показан), способным развивать разные скорости поворота.
Как показано на ФИГ. 94, поворотный приводной стержень 1382 можно избирательно дистально продвигать, в результате чего поворотная приводная головка 1386 функционально зацепляется со шлицевой соединительной частью 1394 цилиндрического кулачка 1338. В данной конфигурации поворот поворотного приводного стержня 1382 вызывает поворот цилиндрического кулачка 1338. Как описано выше, поворот цилиндрического кулачка 1338 вызывает осевые движения закрывающего звена 1330. Таким образом, поворот поворотного приводного стержня 1382 в первом направлении (например, по часовой стрелке) вокруг центральной оси A может вызывать дистальное продвижение закрывающего звена 1330 вдоль центральной оси A, что может приводить к закрытию узла браншей 1311. Альтернативно поворот поворотного приводного стержня 1382 во втором направлении, противоположном первому направлению (например, против часовой стрелки), может вызывать проксимальное оттягивание закрывающего звена 1330 вдоль центральной оси A, что в свою очередь может приводить к открытию узла браншей 1311.
Как показано на ФИГ. 95, поворотный приводной стержень 1382 можно избирательно дистально продвигать, проводя поворотную приводную головку 1386 через просвет цилиндрического кулачка 1338 в пространство 1399 в корпусе привода концевого эффектора 1316 между цилиндрическим кулачком 1338 и поворотной приводной гайкой 1364, причем поворотная приводная головка 1386 не находится в функциональном зацеплении с какими либо шлицевыми соединительными частями. Поворотный приводной стержень 1382 затем можно дополнительно дистально продвигать, в результате чего поворотная приводная головка 1386 функционально зацепляет шлицевую соединительную часть 1397 поворотной приводной гайки 1364, как показано на ФИГ. 96. В данной конфигурации поворот поворотного приводного стержня 1382 вызывает поворот поворотной приводной гайки 1364. Как описано выше, поворот поворотной приводной гайки 1364 вызывает осевые движения резьбового приводного элемента 1362. Таким образом, поворот поворотного приводного стержня 1382 в первом направлении (например, по часовой стрелке) вокруг центральной оси A может вызывать дистальное продвижение резьбового приводного элемента 1362 вдоль центральной оси A, что в свою очередь может привести к дистальному продвижению двутаврового элемента 1360. Альтернативно поворот поворотного приводного стержня 1382 во втором направлении (например, по часовой стрелке), противоположном первому направлению, может вызывать проксимальное оттягивание резьбового приводного элемента 1362, что в свою очередь может приводить к оттягиванию двутаврового элемента 1360 проксимально.
Последовательность событий, вызывающих закрытие узла браншей 1311, полное продвижение двутаврового элемента 1360, полное оттягивание двутаврового элемента 1360 и открытие узла браншей 1311, представлена в хронологическом порядке на ФИГ. 93-96. На ФИГ. 93 показан узел браншей 1311 в полностью открытом положении, двутавровый элемент 1360 в полностью оттянутом положении и поворотный приводной стержень 1382 в оттянутом осевом положении, причем поворотная приводная головка 1386 функционально зацепляет шлицевую соединительную часть 1390 корпуса привода концевого эффектора 1316. В первой фазе эксплуатации поворотный приводной стержень 1382 поворачивается, чтобы повернуть концевой эффектор 1302, придавая ему соответствующую ориентацию, например, относительно кровеносного сосуда. Во второй фазе эксплуатации поворотный приводной стержень 1382 продвигают по оси, в результате чего поворотная приводная головка 1386 функционально зацепляет шлицевую соединительную часть 1394 цилиндрического кулачка 1338. В данной конфигурации поворотный приводной стержень 1382 может поворачиваться в первом направлении (например, по часовой стрелке) вокруг центрально оси A, чтобы закрыть узел браншей 1311 вокруг кровеносного сосуда. Электроды 1378 в первом элементе бранши 1304 и втором элементе бранши 1306 можно активировать для герметизации кровеносного сосуда. В третьей фазе эксплуатации поворотный приводной стержень 1382 можно продвинуть по оси, в результате чего поворотная приводная головка 1386 функционально зацепляет шлицевую соединительную часть 1397 поворотной приводной гайки 1364. В данной конфигурации поворотный приводной стержень 1382 может поворачиваться в первом направлении вокруг центральной оси A (например, по часовой стрелке), продвигая двутавровый элемент 1360 и тем самым рассекая закрытый кровеносный сосуд. В четвертой фазе эксплуатации поворотный приводной стержень 1382 может поворачиваться во втором направлении (например, против часовой стрелки), противоположном первому направлению, оттягивая двутавровый элемент 1360.
В пятой фазе эксплуатации поворотный приводной стержень 1382 оттягивают по оси, в результате чего поворотная приводная головка 1386 функционально зацепляет шлицевую соединительную часть 1394 цилиндрического кулачка 1338. В данной конфигурации поворотный приводной стержень 1382 может поворачиваться во втором направлении (например, против часовой стрелки), противоположном первому направлению, чтобы снова открыть узел браншей 1311, тем самым освобождая герметизированный разрезанный кровеносной сосуд.
Как описано выше, в хирургическом инструменте можно использовать приводную систему для поступательного дистального перемещения приводного элемента внутри концевого эффектора хирургического инструмента, чтобы, например, продвинуть режущий элемент внутри концевого эффектора и чтобы переместить приводную трубку проксимально, оттягивая приводную трубку и/или режущий элемент. На ФИГ. 97 и 98 представлен пример узла приводного стержня 1400, который можно использовать в сочетании с концевым эффектором 1420 и/или любыми концевыми эффекторами, описанными в настоящем документе. Например, узел приводного стержня 1400 (а также узел 1400´) может соответствовать различным резьбовым поворотным приводным элементам, описанным в настоящем документе, включая, например, резьбовые поворотные приводные элементы 604, 654, 1040, 1248, 1364 и т.п. В дополнение к описанному выше, узел приводного стержня 1400 можно дистально продвинуть, чтобы повернуть элемент бранши 1422 концевого эффектора 1420 из закрытого положения в открытое положение, как показано на ФИГ. 97, и продвинуть режущий элемент между элементом бранши 1422 и элементом бранши 1424, находящимся напротив элемента бранши 1422. В одном примере формы узел приводного стержня 1400 включает приводной элемент, или трубку, 1402, который может содержать ряд вырезанных в нем кольцевых соединительных сегментов 1404.
В различных примерах осуществления приводной элемент 1402 может представлять собой полую металлическую трубку, образованную, например, из нержавеющей стали, титана и/или любого другого подходящего материала, который имеет ряд образованных в ней кольцевых соединительных сегментов 1404. В по меньшей мере в одном варианте осуществления кольцевые соединительные сегменты 1404 могут содержать множество неплотно соединенных фигур типа «ласточкин хвост» 1406, которые, например, вырезаны в приводном элементе 1402 лазером и служат для облегчения гибкого перемещения между соседними соединительными сегментами 1404. Такая лазерная резка заготовки трубки позволяет получить гибкую полую приводную трубку, которую можно использовать при сжимании, натягивании и/или скручивании. В такой конфигурации можно использовать полные диаметральные вырезы, которые соединяются со смежной частью в конфигурации, аналогично частям пазла. Данные вырезы повторяются по длине полой трубки в ряд, иногда с поворотом для изменения характеристик натяжения или скручивания. В дополнение к описанному выше, соединенные в «ласточкин хвост» фигуры 1406 являются лишь одним примером осуществления, и в различных ситуациях приводной элемент 1402 может содержать любой подходящий ряд шарнирных сочленений, содержащих соединенные друг с другом выступы и выемки приводного элемента. В различных ситуациях приводной элемент 1402 может содержать решетку шарнирных сочленений, содержащую функционально зацепленные выступы и выемки, которые могут соединяться друг с другом для передачи между ними линейного и/или поворотного движений. В некотором смысле в различных вариантах осуществления приводной элемент 1402 может содержать несколько или множество шарнирных соединений, образованных в корпусе приводного элемента 1402. Приводной элемент 1402 может включать множество шарнирных сочленений, характерных для корпуса приводного элемента 1402.
В дополнение к описанному выше, приводной элемент 1402 может дистально выталкиваться, так чтобы продольная сила передавалась через приводной элемент 1402 и к режущему элементу, например, функционально соединенному с дистальным концом приводного элемента 1402. Соответственно, приводной элемент 1402 может проксимально оттягиваться таким образом, чтобы продольная сила передавалась через приводной элемент 1402 к режущему элементу. Соединенные друг с другом фигуры типа «ласточкин хвост» 1406 могут быть выполнены с возможностью передачи продольного толкающего или тянущего усилия между соединительными сегментами 1404 независимо от того, выровнены ли соединительные сегменты 1404 в продольном направлении, как показано на ФИГ. 98, и/или повернуты относительно друг друга для приспособления к повороту шарнирного сочленения 1430, которое поворотно соединяет концевой эффектор 1420 со стержнем хирургического инструмента. Более конкретно, в дополнение к описанному выше, шарнирное сочленение 1430 может содержать один или более шарнирных сегментов 1434, способных перемещаться относительно друг друга и позволять концевому эффектору 1420 поворачиваться, причем для приспособления к относительному перемещению сегментов шарнирного сочленения 1434 соединительные сегменты 1404 приводного элемента 1402 могут поворачиваться или смещаться относительно друг друга. По меньшей мере в варианте осуществления, показанном на ФИГ. 97, шарнирные соединительные сегменты 1434 могут образовывать канал 1435, проходящий через них, выполненный с возможностью плотного приема приводной трубки 1402 и ограничения существенных поперечных перемещений между соединительными сегментами 1404 при одновременном обеспечении достаточного относительного перемещения между соединительными сегментами 1404, когда шарнирное сочленение 1430 шарнирно повернуто. На ФИГ. 99-101 представлен альтернативный пример микрокольцевых соединительных сегментов 1404' приводного элемента 1402', содержащих в себе множество вырезанных лазером фигур 1406', приблизительно напоминающих, например, неплотно соединенные противоположные Т-образные и T-образные с прорезью формы. Вырезанные лазером фигуры 1406' также могут, например, приблизительно напоминать неплотно соединенные противоположные L-образные и L-образные с прорезью формы. Кольцевые соединительные сегменты 1404, 1404' могут по существу содержать множество микрошарнирных скручиваемых соединений. Таким образом, каждый соединительный сегмент 1404, 1404' может передавать крутящий момент, способствуя по меньшей мере относительному шарнирному повороту между каждым кольцевым соединительным сегментом. Как показано на ФИГ. 99 и 100, соединительный сегмент 1404D' на дистальном конце 1403' приводного элемента 1402' имеет часть дистального опорного кольца 1408D', которое облегчает прикрепление к другим приводным компонентам, инициирующим работу концевого эффектора. Аналогично соединительный сегмент 1404P' на проксимальном конце 1405' приводного элемента 1402' имеет часть проксимального опорного кольца 1408P', которое облегчает прикрепление к другим приводным компонентам или, например, к частям соединения с возможностью быстрой разборки.
Диапазон движений между стыками в каждом конкретном соединительном сегменте 1404' можно увеличить путем увеличения расстояния между лазерными вырезами. Однако в различных ситуациях количество и/или плотность лазерных вырезов в любой конкретной области приводного элемента 1402' может обуславливать особенную гибкость приводного элемента 1402' в данной области. Чтобы соединительные сегменты 1404' оставались соединенными и при этом существенно не снижалась способность приводной трубки к совершению желаемого диапазона движений, можно использовать вторичный ограничительный элемент для ограничения или предотвращения расширения соединительных сегментов 1404' наружу. В варианте осуществления, показанном на ФИГ. 102-103, вторичный ограничительный элемент 1410 содержит пружину 1412 или иной спирально извитый элемент. В различных примерах осуществления дистальный конец 1414 пружины 1412 может соответствовать части дистального опорного кольца 1408D и быть прикрепленным к нему, и он может иметь более тугую намотку, чем центральная часть 1416 пружины 1412. Аналогично проксимальный конец 1418 пружины 1412 может соответствовать части проксимального кольца 1408P' и быть прикрепленным к нему, и он может иметь более тугую намотку, чем центральная часть 1416 пружины 1412. Вследствие такой более тугой намотки дистальный конец 1414 и/или проксимальный конец 1418 может содержать витки, расположенные более плотно, чем витки в центральной части 1416. Иными словами, количество витков на единицу длины в дистальном конце 1414 и/или в проксимальном конце 1418 может быть больше количества витков на единицу длины в центральной части 1416. В любом случае пружина 1412 может образовывать продольное отверстие 1413, в котором, например, может располагаться приводной элемент 1402' и/или приводной элемент 1402. Продольное отверстие 1413 и приводной элемент 1402' могут быть выполнены по форме и размеру таким образом, чтобы приводной элемент 1402' плотно принимался продольным отверстием 1413, причем в различных вариантах осуществления витки пружины 1412 способны ограничивать перемещение соединительных сегментов 1404' наружу, так чтобы соединительные сегменты 1404' не отсоединялись друг от друга при их повороте относительно друг друга. Как описано выше, дистальный конец 1414 пружины 1412 может быть неподвижно установлен на дистальном конце 1403' приводного элемента 1402', а проксимальный конец 1418 пружины 1412 может быть неподвижно установлен на проксимальном конце 1405' приводного элемента 1402', причем перемещение дистального конца трубки 1403' может перемещать дистальный конец пружины 1414, соответственно, перемещение проксимального конца трубки 1405' может перемещать проксимальный конец пружины 1418. В различных ситуациях концы пружины 1414 и 1418 могут быть, например, припаяны к концам трубки 1403' и 1405' соответственно. По меньшей мере в представленном варианте осуществления витки центральной части 1416 могут не быть неподвижно установлены на приводном элементе 1402'. По меньшей мере в одном таком варианте осуществления приводной элемент 1402' может быть выполнен с возможностью по меньшей мере частичного шарнирного поворота внутри витков центральной части 1416 до тех пор, пока приводной элемент 1402' не войдет в контакт с витками, причем витки могут быть выполнены с возможностью по меньшей мере частичного расширения или смещения для приспособления к боковому перемещению приводного элемента 1402'. В других различных вариантах осуществления по меньшей мере некоторые части витков центральной области 1416 могут быть неподвижно установлены, например, за счет пайки, на приводном элементе 1402'.
В дополнение к описанному выше, на приводную трубку 1402' может быть установлен ограничительный элемент 1410 с заданным шагом, так что ограничительный элемент 1410 также функционирует, например, в качестве гибкой приводной резьбы 1440 для резьбового зацепления с другими резьбовыми приводными компонентами на концевом эффекторе и/или на системе управления, как описано выше. Приводной элемент 1402' может быть ограничен в повороте вокруг своей продольной оси, причем когда резьбовой входной элемент привода зацепляет резьбу 1440 и поворачивается двигателем в первом направлении, приводной элемент 1402', например, может дистально продвигаться внутри концевого эффектора 1420. Соответственно, когда резьбовой входной элемент привода, зацепляющий резьбу 1440, поворачивается во втором, противоположном, направлении, приводной элемент 1402' может оттягиваться дистально. Следует понимать, что ограничительный элемент 1410 может быть установлен таким образом, чтобы резьба 1440 имела постоянный или по меньшей мере по существу постоянный шаг по всей своей длине. В таких вариантах осуществления приводной элемент 1402’ можно продвигать и/или оттягивать с постоянной или по меньшей мере по существу постоянной скоростью при заданной скорости поворота резьбового входного элемента привода. Следует понимать, что ограничительный элемент 1410 может быть установлен таким образом, чтобы резьба 1440 имела переменный шаг или шаг, изменяющийся по длине приводного элемента 1402'. Например, конфигурацию ограничительного элемента 1410 с переменным шагом можно использовать для замедления приводного узла 1400' или ускорения приводного узла 1400' в течение определенных частей пускового такта, осуществляемого приводным узлом 1400'. Например, первая часть резьбы 1440 может иметь первый шаг, который меньше шага второй части резьбы 1440, причем первый шаг может, например, приводить в движение закрывающий элемент с первой скоростью, а вторая часть может приводить в движение закрывающий элемент со второй скоростью. По меньшей мере в некоторых формах узел приводного стержня, например, содержит резьбу с изменяемым шагом на полом гибком приводном стержне, который можно толкать или тянуть, например, в пределах 90 градусного изгиба или более.
Как описано выше, приводной элемент 1402' может быть ограничен в повороте вокруг своей продольной оси. Более того, весь узел приводного стержня 1400' может быть ограничен в повороте вокруг своей продольной оси. В различных вариантах осуществления приводной элемент 1402' может содержать продольный паз, образованный в нем, который может зацеплять один или более выступов, которые могут, например, отходить вовнутрь от концевого эффектора 1420 и/или шарнирных соединительных элементов 1434 в продольный паз. Такая конфигурация продольного паза и выступов может быть выполнена с возможностью предотвращать или по меньшей мере ограничивать поворот узла приводного стержня 1400' вокруг его продольной оси. В соответствии с настоящим документом продольная ось узла приводного стержня 1400' и/или приводного элемента 1402' может проходить вдоль центра узла приводного стержня 1400' независимо от того, находится ли узел приводного стержня 1400' в прямой конфигурации или изогнутой конфигурации. Таким образом, траектория и направление продольной оси узла приводного стержня 1400’ может изменяться при повороте концевого эффектора 1420 и узла приводного стержня 1400', приспосабливаясь к повороту концевого эффектора 1420. В дополнение к описанному выше, приводной элемент 1402' может быть неподвижно установлен на режущем элементе, находящемся внутри концевого эффектора 1420, или проходить проксимально от него. Как описано в настоящем документе, режущий элемент может плотно приниматься различными пазами и/или каналами, выполненными в концевом эффекторе, что не дает режущему элементу и проходящему от него узлу приводного стержня 1400' поворачиваться или по меньшей мере существенно поворачиваться вокруг своей продольной оси. Хотя продольная ось узла приводного стержня 1400' может быть образована приводным элементом 1402', продольная ось может быть образована пружиной 1412. По меньшей мере в одном таком варианте осуществления продольную ось узла приводного стержня 1400' может образовывать траектория, проходящая через центр пружинного кольца. В любом случае узел приводного стержня 1400' может быть ограничен в повороте вокруг своей продольной оси.
Как показано на ФИГ. 104 и 105, узел приводного стержня 1400' может содержать внутренний ограничительный элемент, такой как гибкий сердечник 1417, выполненный с возможностью ограничения или предотвращения направленного вовнутрь перемещения или сжатия соединительных сегментов 1404' приводного элемента 1402'. Приводной элемент 1402' может образовывать внутреннюю продольную полость 1415, выполненную с возможностью плотно принимать гибкий сердечник 1417. По меньшей мере в одном таком варианте осуществления внутренняя полость 1415, образованная в приводном элементе 1402', может содержать диаметр или ширину, которые равны или по меньшей мере по существу равны диаметру или ширине гибкого сердечника 1417. В различных ситуациях в течение шарнирного поворота концевого эффектора 1420 части соединительных сегментов 1404' могут, например, отклоняться или смещаться вовнутрь к гибкому сердечнику 1417, причем, когда соединительные сегменты 1404' приводятся в контакт с гибким сердечником 1417, сердечник 1417 может тормозить направленное вовнутрь перемещение соединительных сегментов 1404' и предотвращать сжатие приводного элемента 1402' вовнутрь. Гибкий сердечник 1417 может быть установлен по меньшей мере на некоторых частях приводного элемента 1402', таких как его дистальный конец 1408D' и/или его проксимальный конец 1408P'. В некоторых вариантах осуществления гибкий сердечник 1417 может не быть неподвижно установлен на приводном элементе 1402', причем в таких вариантах осуществления гибкий сердечник 1417 может удерживаться на месте приводным элементом 1402'. В любом случае гибкий сердечник 1417 может быть достаточно гибким, чтобы позволить узлу приводного стержня 1400' сгибаться или шарнирно поворачиваться в той мере, чтобы передавать приложенное к нему толкающее или тянущее усилие, как описано выше.
Как описано выше, узел стержня 1400' может, например, быть выполнен с возможностью изгибания или разгибания для приспособления к шарнирному повороту концевого эффектора 1420 вокруг шарнирного сочленения 1430. Приводной элемент 1402', гибкий сердечник 1417 и/или пружина 1412 могут быть упругими таким образом, чтобы узел стержня 1400', например, мог возвращаться в исходную продольную конфигурацию. В различных ситуациях концевой эффектор 1420 может поворачиваться из его шарнирно повернутого положения обратно в его продольное или прямое положение, и таким образом узел стержня 1400' может быть выполнен с возможностью изгибания или разгибания для приспособления к возврату концевого эффектора 1420 в исходное положение.
Как показано на ФИГ. 106-108, хирургический инструмент 1000 может включать хирургический концевой эффектор 1001 и узел стержня 1003. Хирургический концевой эффектор 1001 может быть выполнен с возможностью выполнения хирургических операций в результате сообщения ему приводных движений. Узел стержня 1003 может быть выполнен с возможностью передачи таких приводных движений на хирургический концевой эффектор 1001. Хирургический концевой эффектор 1001 может включать первый элемент бранши 1002 и второй элемент бранши 1004. Первый элемент бранши 1002 может быть выполнен с возможностью перемещения относительно второго элемента бранши 1004 между первым положением и вторым положением. Альтернативно первый элемент бранши 1002 и второй элемент бранши 1004 могут быть выполнены с возможностью перемещения относительно друг друга между первым положением и вторым положением. Первое положение может быть открытым положением, а второе положение может быть закрытым положением.
Как показано на ФИГ. 106-108, первый элемент бранши 1002 может перемещаться шарнирно относительно второго элемента бранши 1004 между первым положением и вторым положением. Как показано на ФИГ. 108, первый элемент бранши 1002 может включать монтажные отверстия (не показаны), и второй элемент бранши 1004 может включать монтажные отверстия 1008. Первый элемент бранши 1002 может располагаться относительно второго элемента бранши 1004 таким образом, чтобы шарнирный палец или цапфа (не показан) вставлялись через монтажные отверстия первого элемента бранши 1002 и монтажные отверстия 1008 второго элемента бранши 1004 шарнирно соединяли первый элемент бранши 1002 со вторым элементом бранши 1004. Другие подходящие средства для соединения первого элемента бранши 1002 и второго элемента бранши 1004 также входят в объем настоящего описания.
Как показано на ФИГ. 106-108, хирургический концевой эффектор 1001 можно выполнить с возможностью выполнения множества функций. Например, хирургический концевой эффектор 1001 может включать захватные части 1010, расположенные на внешних поверхностях первого элемента бранши 1002 и/или второго элемента бранши 1004. Захватные части 1010 могут быть выполнены с возможностью приведения в контакт с тканью и резкого ее рассечения. Подходящие захватные части 1010 описаны, например, применительно к ФИГ. 116-131. Хирургический концевой эффектор 1001 также может включать наклоненные поверхности зацепления ткани 1012 для рассечения ткани. Подходящие наклоненные поверхности зацепления ткани 1012 описаны, например, применительно к ФИГ. 132-142. Первый элемент бранши 1002 может включать внутреннюю поверхность 1014, и второй элемент бранши 1004 может включать внутреннюю поверхность 1016. Первая 1014 и вторая 1016 внутренние поверхности могут быть выполнены с возможностью захвата, пропускания и/или манипулирования тканью и/или хирургическими инструментами, такими как иглы 1015 для сшивания ткани. Такая функциональность захвата, пропускания и/или манипулирования описана, например, применительно к ФИГ. 153-168. Кроме того, хирургический концевой эффектор 1001 также может включать электроды 1017 и/или другие электрически активные поверхности для герметизации кровеносных сосудов в течение хирургического вмешательства. Электроды 1017 могут быть выполнены с возможностью подачи радиочастотной (РЧ) энергии на ткань, зажатую между первым элементом бранши 1002 и вторым элементом бранши 1004, находящимися в закрытом положении, для соединения/спайки ткани, которую можно рассечь поступательным перемещением режущего элемента 1018. Подходящие электроды описаны, например, применительно к ФИГ. 153-168.
Как показано на ФИГ. 108-111, хирургический концевой эффектор 1001 может быть разъемно прикреплен к узлу стержня 1003. Оператор или хирург может прикрепить хирургический концевой эффектор 1001 к узлу стержня 1003 для выполнения хирургического вмешательства. В варианте осуществления, представленном на ФИГ. 108, узел стержня 1003 включает соединительную конфигурацию в форме конфигурации, или соединения, с возможностью быстрой разборки 1019, облегчающую быстрое прикрепление дистальной стержневой части 1020 узла стержня 1003 к проксимальной стержневой части 1022 хирургического концевого эффектора 1001. Соединение с возможностью быстрой разборки 1019 может способствовать быстрому прикреплению и отсоединению множества передаточных компонентов, обеспечивающих передачу управляющих движений от источника приводных движений к функционально соединенному с ним концевому эффектору.
Как показано на ФИГ. 112, хирургический концевой эффектор 1001 можно заменить на другие хирургические концевые эффекторы, подходящие для применения с узлом стержня 1003. Например, хирургический концевой эффектор 1001 можно отсоединить от узла стержня 1003, а второй хирургический концевой эффектор 1024 можно прикрепить к узлу стержня 1003. В другом примере второй хирургический концевой эффектор 1024 можно заменить третьим хирургическим концевым эффектором 1026. Хирургические концевые эффекторы 1001, 1024 и 1026 могут включать общие передаточные компоненты, находящиеся в функциональном зацеплении с соответствующими частями узла стержня 1003. Однако каждый из хирургических концевых эффекторов 1001, 1024 и 1026 может включать уникальные функциональные особенности, подходящие для определенных хирургических задач.
Хирургический концевой эффектор 1001 может включать исполнительный механизм. Исполнительный механизм может содержать закрывающий механизм для перемещения первого элемента бранши 1002 относительно второго элемента бранши 1004. Исполнительный механизм может содержать пусковой механизм для рассечения ткани, зажатой между первым элементом бранши 1002 и вторым элементом бранши 1004. Закрытие и пуск могут осуществляться отдельными механизмами, которые могут приводиться в движение по отдельности или одновременно. В альтернативном варианте осуществления закрытие и пуск могут осуществляться одним и тем же механизмом. Подходящие закрывающие механизмы и подходящие пусковые механизмы описаны, например, применительно к ФИГ. 64-82, 83-91 и 92-96.
На ФИГ. 113 показан исполнительный механизм 1028. Исполнительный механизм может включать совершающий возвратно поступательные движения элемент 1030. Совершающий возвратно поступательные движения элемент 1030 может содержать криволинейный паз 1032, выполненный с возможностью приема штифта криволинейного сечения 1034, соединенного с первым элементом бранши 1002. Дистальное и проксимальное перемещение совершающего возвратно поступательные движения элемента 1030 может воздействовать на штифт криволинейного сечения 1032 так, чтобы тот поступательно перемещался внутри криволинейного паза 1034, что в свою очередь может вызывать поворот первого элемента бранши 1002 из открытого положения (например, проксимального положения совершающего возвратно поступательные движения элемента 1030) в закрытое положение (например, дистальное положение совершающего возвратно поступательные движения элемента 1030). В вариантах осуществления, в которых первый 1002 и второй 1004 элементы бранши выполнены с возможностью перемещения, оба элемента бранши 1002 и 1004 могут содержать штифт криволинейного сечения, и совершающий возвратно поступательные движения элемент 1030 может содержать пару криволинейных пазов или желобов. Совершающий возвратно поступательные движения элемент 1030 может представлять собой двутавровый элемент, выполненный с возможностью скольжения по элементам бранши 1002 и 1004 для закрытия элементов бранши 1002 и 1004 и/или для создания сжимающего усилия, обеспечивающего сведение элементов бранши 1002 и 1004 друг с другом. Совершающий возвратно поступательные движения элемент 1030 может включать режущее лезвие 1036. Режущее лезвие 1036 можно прикрепить к совершающему возвратно-поступательные движения элементу 1030 и расположить таким образом, чтобы его можно было выдвигать и оттягивать вместе с совершающим возвратно-поступательные движения элементом 1030. Режущий элемент может выдвигаться для рассечения ткани или материала, находящегося между элементами бранши 1002 и 1004.
Как показано на ФИГ. 108-111, исполнительный механизм 1028 может включать поворотную приводную гайку 1038 и резьбовой поворотный приводной элемент 1040. Поворотный приводной элемент 1040 может проходить проксимально от совершающего возвратно поступательные движения элемента 1030. Совершающий возвратно поступательные движения элемент 1030 и поворотный приводной элемент 1040 могут быть образованы заодно как один элемент. Альтернативно совершающий возвратно-поступательные движения элемент 1030 и поворотный приводной элемент 1040 можно образовать по отдельности и соединить сваркой. Можно использовать и другие методики для соединения совершающего возвратно-поступательные движения элемента 1030 и поворотного приводного элемента 1040, и они входят в объем настоящего описания. Поворотная приводная гайка 1038 может быть функционально поддерживаемой внутри проксимальной стержневой части 1022 хирургического концевого эффектора 1001, которая отходит проксимально относительно элементов бранши 1002 и 1004. Поворотная приводная гайка 1038 может поворачиваться вокруг центральной оси, проходящей через проксимальную стержневую часть 1022, например, как описано выше в настоящем документе. Поворотный приводной элемент 1040 может проходить проксимально от совершающего возвратно-поступательные движения элемента 1030 вдоль центральной оси через поворотную приводную гайку 1038. Поворотная приводная гайка 1038 и поворотный приводной стержень 1040 могут соединяться друг с другом в конфигурацию таким образом, что поворот поворотной приводной гайки 1038 вокруг центральной оси в одном направлении (например, по часовой стрелке) может продвигать поворотный приводной элемент 1040, а поворот поворотной приводной гайки 1038 вокруг центральной оси в противоположном направлении (например, против часовой стрелки) может оттягивать поворотный приводной элемент 1040. Данный исполнительный механизм и другие подходящие исполнительные механизмы описаны, например, применительно к ФИГ. 64-82, 83-91 и 92-96.
Как показано на ФИГ. 108-111, хирургический инструмент 1000 может включать поворотный приводной стержень 1042, продольно размещенный внутри узла стержня 1003. Поворотный приводной стержень 1042 может включать поворотную приводную головку 1044 на своей дистальной части. Поворотная приводная гайка 1038 может содержать активирующий соединитель 1046 для соединения с поворотной приводной головкой 1044 в конфигурацию таким образом, чтобы, когда соединение установлено, поворотная приводная головка 1044 могла передавать поворотные движения на активирующий соединитель 1046. Поворотный приводной стержень 1042 может избирательно перемещаться по оси между множеством отдельных положений. Например, поворотный приводной стержень 1042 можно выдвигать по оси, в результате чего поворотная приводная головка 1044 функционально зацепляет активирующий соединитель 1046, как показано на ФИГ. 111. Альтернативно поворотный приводной стержень 1042 можно оттягивать по оси, расцепляя поворотную приводную головку 1044 с активирующим соединителем 1046. Такая конфигурация позволяет быстро и эффективно прикреплять и отсоединять множество хирургических эффекторов к узлу стержня 1003 и от него.
На ФИГ. 108-110 хирургический концевой эффектор 1001 отсоединен от узла стержня 1003. Проксимальная стержневая часть 1022 хирургического концевого эффектора 1001 расцеплена с дистальной стержневой частью 1020 узла стержня 1003. Как показано на ФИГ. 108, проксимальная стержневая часть 1022 хирургического концевого эффектора 1001 может включать в себя сужающийся конец для соединения в конфигурацию с воронкообразным концом дистальной стержневой части 1020 узла стержня 1003. Поворотный приводной стержень 1042 может включать полую дистальную часть, которая проходит дистально вдоль центральной оси через поворотную приводную головку 1044 и заканчивается у ее дистального отверстия. В полую дистальную часть может приниматься проксимальная часть поворотного приводного элемента 1040, при прикреплении хирургического концевого эффектора 1001 к узлу стержня 1003. Поворотный приводной элемент 1040 может свободно поворачиваться внутри полой дистальной части поворотного приводного стержня 1042. Как показано на ФИГ. 110, хирургический концевой эффектор 1001 прикрепляют к узлу стержня 1003, просто вставляя проксимальную часть поворотного приводного элемента 1040 в полую часть поворотного приводного стержня 1042 и вводя суженный конец проксимальной стержневой части 1022 хирургического концевого эффектора 1001 в соединение с воронкообразным концом дистальной стержневой части 1020 узла стержня 1003. Как показано на ФИГ. 111, после прикрепления хирургического концевого эффектора 1001 к узлу стержня 1003 поворотный приводной стержень 1042 можно продвинуть, в результате чего поворотная приводная головка 1044 функционально зацепляет активирующий соединитель 1046 для передачи поворотных движений на поворотную приводную гайку 1038. Другие средства и методики для разъемного прикрепления хирургического концевого эффектора 1001 к узлу стержня 1003 также предусмотрены и входят в объем настоящего описания.
Как показано на ФИГ. 108-110, проксимальная стержневая часть 1022 хирургического концевого эффектора 1001 и дистальная стержневая часть 1020 узла стержня 1003 могут иметь выравнивающие элементы, обеспечивающие надлежащее выравнивание хирургического концевого эффектора 1001 и узла стержня 1003 при прикреплении. В примере осуществления, показанном на ФИГ. 108, проксимальная стержневая часть 1022 хирургического концевого эффектора 1001 включает шпонку 1048, а дистальная стержневая часть 1020 узла стержня 1003 может включать паз 1050 для приема шпонки. Другие средства выравнивания и методики для выравнивания хирургического концевого эффектора 1001 по узлу стержня 1003 также предусмотрены и входят в объем настоящего описания.
Как показано на ФИГ. 114, хирургический концевой эффектор 1001 может включать исполнительный механизм, в котором пуск и закрытие осуществляются по отдельности. Данный исполнительный механизм и другие подходящие исполнительные механизмы описаны, например, применительно к ФИГ. 83-91 и 92-96. В примере осуществления, как показано на ФИГ. 114, хирургический концевой эффектор 1001 содержит закрывающий механизм 1052 и пусковой механизм 1054, которые приводятся в движение по отдельности. Закрывающий механизм 1052 включает закрывающий шкив 1056, а пусковой механизм 1054 включает пусковой шкив 1058. Как описано выше, хирургический концевой эффектор 1001 можно разъемно прикрепить к узлу стержня 1003. Как показано на ФИГ. 114, проксимальную стержневую часть 1022 хирургического концевого эффектора 1001 можно отсоединить от дистальной стержневой части 1020 узла стержня 1003. После прикрепления проксимальной стержневой части 1022 хирургического концевого эффектора 1001 к дистальной стержневой части 1020 узла стержня 1003 привод стержня 1042 можно дистально выдвинуть в первое отдельное положение для функционального зацепления с закрывающим шкивом 1056. В альтернативном варианте осуществления привод стержня можно дистально выдвинуть во второе отдельное положение, дистальное к первому отдельному положению, для функционального зацепления с пусковым шкивом 1058.
Как показано на ФИГ. 115, хирургический инструмент 1000 может включать шарнирное сочленение 1060 для шарнирного поворота хирургического концевого эффектора 1001 вокруг продольной оси инструмента LT. В данном примере осуществления шарнирное сочленение 1060 расположено проксимально к дистальной части 1020 узла стержня 1003. Шарнирное сочленение 1060 шарнирно поворачивает дистальную часть 1020 узла стержня 1003. Когда проксимальная часть 1022 хирургического концевого эффектора 1001 прикреплена к дистальной части 1020 узла стержня 1003, шарнирный поворот дистальной части 1020 узла стержня 1003 вызовет шарнирный поворот хирургического концевого эффектора 1003.
В примере осуществления, как показано на ФИГ. 115, шарнирное сочленение 1060 включает проксимальную гнездовую трубку 1062, прикрепленную к узлу стержня 1003, и образует в нем проксимальное шаровое гнездо. См. ФИГ. 115. Внутри проксимального шарового гнезда подвижно герметизирован проксимальный шаровой элемент 1064. Как показано на ФИГ. 115, проксимальный шаровой элемент 1064 имеет центральный канал для привода, позволяющий поворотному приводному стержню 1042 проходить через него. Кроме того, проксимальный шаровой элемент 1064 имеет в себе четыре шарнирных канала, способствующие введению через них четырех дистальных кабелей 1066. Как также показано на ФИГ. 115, шарнирное сочленение 1060 дополнительно включает сегмент промежуточной шарнирной трубки 1068, который имеет образованное в нем промежуточное шаровое гнездо. Промежуточное шаровое гнездо выполнено с возможностью подвижного поддерживания в нем дистального шарового элемента 1070, образованного на дистальной соединительной трубке 1072. Кабели 1066 проходят через каналы для кабелей, образованные в дистальном шаровом элементе 1070, и прикрепляются к нему утолщениями 1074. Другие способы прикрепления, подходящие для прикрепления кабелей к шару 1070 концевого эффектора, входят в объем настоящего описания.
Как показано на ФИГ. 116-120, хирургический инструмент 900 может включать хирургический концевой эффектор, проходящий от узла стержня 903. Хирургический концевой эффектор 901 может быть выполнен с возможностью выполнения хирургических операций в результате сообщения ему приводных движений. Хирургический концевой эффектор 901 включает первый элемент бранши 902 и второй элемент бранши 904. Первый элемент бранши 902 может быть выполнен с возможностью перемещения относительно второго элемента бранши 904 между первым положением и вторым положением. В альтернативном варианте осуществления первый элемент бранши 902 и второй элемент бранши 904 могут быть выполнены с возможностью перемещения относительно друг друга между первым положением и вторым положением. Первое положение может быть открытым положением, а второе положение может быть закрытым положением.
Как показано на ФИГ. 116-120, первый элемент бранши 902 может перемещаться шарнирно относительно второго элемента бранши 904 между открытым положением и закрытым положением. Как показано на ФИГ. 120, первый элемент бранши 902 может включать монтажные отверстия 906, а второй элемент бранши 904 может включать монтажные отверстия 908. Первый элемент бранши 902 может располагаться относительно второго элемента бранши 904 таким образом, чтобы шарнирный палец или цапфа (не показан) вставлялся через монтажные отверстия 906 первого элемента бранши 902 и монтажные отверстия 908 второго элемента бранши 904, шарнирно соединяя первый элемент бранши 902 со вторым элементом бранши 904. Другие подходящие средства для соединения первого элемента бранши 902 со вторым элементом бранши 904 входят в объем настоящего описания.
Как показано на ФИГ. 116-120, хирургический концевой эффектор 901 можно выполнить с возможностью выполнения множества функций. Например, хирургический концевой эффектор 901 может включать наклоненные поверхности зацепления ткани 910 для рассечения ткани. Подходящие поверхности зацепления ткани 910 описаны, например, применительно к ФИГ. 132-142. Первый элемент бранши 902 может включать внутреннюю поверхность 912, а второй элемент бранши 904 может включать внутреннюю поверхность 914. Первая внутренняя поверхность 912 и вторая внутренняя поверхность 914 могут быть выполнены с возможностью захвата, пропускания и/или манипулирования тканью и/или хирургическими инструментами, такими как иглы 915 для сшивания ткани. Такая функциональность захвата, пропускания и/или манипулирования описана, например, применительно к ФИГ. 153-168.
Как показано на ФИГ. 116-120, хирургический концевой эффектор 901 также может включать электроды 916 и/или другие электрически активные поверхности для герметизации кровеносных сосудов в течение хирургического вмешательства. Электроды 916 могут быть выполнены с возможностью подачи радиочастотной (РЧ) энергии на ткань, зажатую между первым элементом бранши 902 и вторым элементом бранши 904, находящимися в закрытом положении, для соединения/спайки ткани, которую можно рассечь поступательным перемещением режущего элемента. Подходящие электроды 916 описаны, например, применительно к ФИГ. 6-10 и ФИГ. 153-168. Хирургический концевой эффектор 901 может быть разъемно прикреплен к узлу стержня 903. Оператор или хирург может прикрепить хирургический концевой эффектор 901 к узлу стержня 903 для выполнения хирургического вмешательства. Подходящие методики и механизмы разъемного прикрепления хирургического концевого эффектора 901 к узлу стержня 903 описаны, например, применительно к ФИГ. 106-115.
Как показано на ФИГ. 116-120, хирургический концевой эффектор 901 может включать исполнительный механизм. Исполнительный механизм может содержать закрывающий механизм для перемещения первого элемента бранши относительно второго элемента бранши. Исполнительный механизм может содержать пусковой механизм для рассечения ткани, захваченной между первым элементом бранши и вторым элементом бранши. Закрытие и пуск могут осуществляться отдельными механизмами, которые могут приводиться в движение по отдельности или одновременно. В альтернативном варианте осуществления закрытие и пуск могут осуществляться одним и тем же механизмом. Подходящие закрывающие механизмы и подходящие пусковые механизмы описаны, например, применительно к ФИГ. 64-82, 83-91 и 92-96.
На ФИГ. 117 показан пример исполнительного механизма 920. Исполнительный механизм 920 может содержать совершающий возвратно-поступательные движения элемент 918, аналогичный подвижному по оси элементу 3016, описанному выше в настоящем документе. Совершающий возвратно-поступательные движения элемент 918 или его штифт криволинейного сечения 924 может приниматься в криволинейный паз 922. Дистальное и проксимальное перемещение совершающего возвратно-поступательные движения элемента 918 может воздействовать на штифт криволинейного сечения 924 так, чтобы он поступательно перемещался внутри криволинейного паза 922, что в свою очередь может вызывать поворот первого элемента бранши 902 из открытого положения (например, проксимального положения совершающего возвратно-поступательные движения элемента 918) в закрытое положение (например, дистальное положение совершающего возвратно-поступательные движения элемента 918). В вариантах осуществления, в которых и первый 902 и второй 904 элементы бранши выполнены с возможностью перемещения, оба элемента бранши могут содержать криволинейный паз 922, и совершающий возвратно-поступательные движения элемент 918 может содержать пару штифтов криволинейного сечения. Совершающий возвратно-поступательные движения элемент 918 может представлять собой двутавровый элемент, выполненный с возможностью скольжения по первому элементу бранши 902 и второму элементу бранши 904 для закрытия первого элемента бранши 902 и второго элемента бранши 904 и/или для создания сжимающего усилия, обеспечивающего сведение вместе первого элемента бранши 902 и второго элемента бранши 904. Совершающий возвратно-поступательные движения элемент 918 может включать режущее лезвие 926. Режущее лезвие 926 можно прикрепить к совершающему возвратно-поступательные движения элементу 918 и расположить таким образом, чтобы его можно было выдвигать и оттягивать вместе с совершающим возвратно-поступательные движения элементом 918. Режущее лезвие 926 может выдвигаться для рассечения ткани или материала, находящегося между первым элементом бранши 902 и вторым элементом бранши 904.
Как показано на ФИГ. 116-120, первый элемент бранши 902 может включать внешнюю поверхность 928. Внешняя поверхность первого элемента бранши 902 может включать первую захватывающую ткань часть 930. Второй элемент бранши 904 также может включать внешнюю поверхность 932. Внешняя поверхность 932 второго элемента бранши 904 может включать захватывающую ткань часть 934. Первая захватывающая ткань часть 930 и вторая захватывающая ткань часть 934 могут захватывать ткань путем приведения их в контакт и временного адгезивного прикрепления к ткани. Первая захватывающая ткань часть 930 и вторая захватывающая ткань часть 934 могут входить в контакт с тканью и резко рассекать ее, когда первый элемент бранши 902 и второй элемент бранши 904 перемещаются относительно друг друга из закрытого положения в открытое положение.
В одном примере осуществления хирургический концевой эффектор 901 можно использовать в течение хирургического вмешательства для рассечения ткани. Например, первая захватывающая часть 930 и вторая захватывающая часть 934 могут входить в контакт и временно адгезивно прикрепляться к первой и второй частям ткани (не показаны) соответственно таким образом, что при перемещении первого элемента бранши 902 относительно второго элемента бранши 904 из закрытого положения в открытое положение первая часть ткани отделяется от второй части ткани по лицевым поверхностям при существенном сохранении местно региональной архитектуры и структурной целостности сосудов и нервов. Первая захватывающая часть 930 и вторая захватывающая часть 934 могут быть выполнены с возможностью создания операционного пространства в течение хирургического вмешательства, резко разделяя (рассекая) слои ткани при перемещении первого элемента бранши 902 относительно второго элемента бранши 904.
Как показано на ФИГ. 121, первая захватывающая часть 930 и вторая захватывающая часть 934 могут быть образованы на дистальных частях внешних поверхностей 928 и 932 первого и второго элементов бранши 902 и 904 путем нанесения покрытия. В одном варианте осуществления первая и вторая захватывающие части 930 и 934 прикреплены к внешним поверхностям 928 и 932 соответствующих элементов бранши при помощи адгезива. В одном варианте осуществления первая и вторая захватывающие части 930 и 934 запрессованы в дистальные части внешних поверхностей 928 и 932. Другие методики и средства для прикрепления или формирования захватывающей части на внешней поверхности входят в объем настоящего описания.
Первая и вторая захватывающие части 930 и 934 могут включать материалы с высоким коэффициентом трения, чтобы захватывать ткань при скольжении ткани относительно первого и второго элементов бранши 902 и 904 при перемещении первого и второго элементов бранши 902 и 904 относительно друг друга в открытое положение, тем самым отделяя (рассекая) слои ткани по лицевым плоскостям при существенном сохранении локально региональной архитектуры и структурной целостности сосудов и нервов. Примеры материалов с высоким коэффициентом трения, которые можно использовать для образования первой и второй захватывающих частей 930 и 934, включают, без ограничений, эластомеры на силиконовой основе, термопластичные эластомеры (ТПЭ) на стироловой основе, полиизопрен, полиэтилен низкой плотности, полипропилен, сантопрен, силикон, полиуретан, натуральный каучук, изопласт, жидкокристаллический полимер (LCP) и т.п.
Первая и вторая захватывающие части 930 и 934 могут включать полужесткий материал, достаточно гибкий, чтобы сгибаться без смещения при контакте с тканью. Первая и вторая захватывающие части 930 и 934 могут включать неаллергенный биосовместимый материал. В одном варианте осуществления первая и вторая захватывающие части 930 и 934 могут содержать материал с низким модулем упругости и высокой пластической деформацией, такой как эластомер. Примеры подходящих эластомеров включают, без ограничений, эластомеры на силиконовой основе, термопластичные эластомеры (ТПЭ) на стироловой основе, полиизопрен, полиэтилен низкой плотности, полипропилен, сантопрен, силикон, полиуретан, натуральный каучук, изопласт, жидкокристаллический полимер (LCP) и т.п.
Как показано на ФИГ. 116-120, первая и вторая захватывающие части 930 и 934 могут включать захватывающие элементы 936. Захватывающие элементы 936 могут быть достаточно гибкими, чтобы сгибаться без смещения при контакте с тканью. Захватывающие элементы 936 могут иметь форму выступов 938. По меньшей мере в одном варианте осуществления захватывающие элементы 936 могут иметь форму углублений 940.
Как показано на ФИГ. 121-126, захватывающие элементы 936 могут располагаться в виде обеспечивающего захват рисунка 942. Обеспечивающий захват рисунок 942 может содержать множество выступов 938. Обеспечивающий захват рисунок может содержать множество углублений 940. По меньшей мере в одном варианте осуществления, как показано на ФИГ. 127, обеспечивающий захват рисунок 942 может содержать множество перемежающихся выступов 938 и углублений 940. В одном варианте осуществления, как показано на ФИГ. 123, обеспечивающий захват рисунок 942 может включать четыре выступа 938.
Как показано на ФИГ. 128, обеспечивающий захват рисунок 942 может содержать несколько выступов 940, расположенных по кругу. Возможны и другие варианты расположения, которые входят в объем настоящего описания. Как показано на ФИГ. 122, обеспечивающий захват рисунок 942 может включать множество выступов 938, расположенных множеством рядов, причем каждый ряд включает множество выступов 938, выровненных по длине ряда. Каждый ряд может включать перемежающиеся выступы 938 и углубления 940.
Как показано на ФИГ. 123-128, обеспечивающий захват рисунок 942 может включать вертикальные выступы 938, проходящие горизонтально от захватывающей части 930. Как показано на фигуре, вертикальные выступы 938 могут проходить в противоположных направлениях. В некоторых вариантах осуществления, как показано на ФИГ. 124, выступы 938 могут проходить параллельными рядами. По меньшей мере в одном варианте осуществления, как показано на ФИГ. 125, обеспечивающий захват рисунок 942 включает первое множество параллельных выступов 938a и второе множество параллельных выступов 938b, причем первое множество 938a расположено под углом относительно второго множества 938b. По меньшей мере в одном варианте осуществления, как показано на ФИГ. 125, обеспечивающий захват рисунок 930 может представлять собой рисунок елочку.
Как показано на ФИГ. 129-131, обеспечивающий захват рисунок 942 может иметь вертикальные выступы 938, нелинейно проходящие горизонтально от захватывающей части 930. Например, как показано на ФИГ. 129, нелинейные выступы 938 могут проходить зигзагом. В некоторых вариантах осуществления, как показано на ФИГ. 130 и 131, нелинейные выступы 938 могут проходить параллельными рядами. В некоторых вариантах осуществления, как показано на ФИГ. 130 и 131, нелинейно расположенные выступы 938 могут проходить в противоположных направлениях.
Как показано на ФИГ. 132-137, концевой эффектор 500 содержит первый элемент бранши 502A и второй элемент бранши 502B. Первый элемент бранши 502A выполнен с возможностью перемещения относительно второго элемента бранши 502B между открытым положением (ФИГ. 132 и 136) и закрытым положением (ФИГ. 133, 134 и 137) с зажатием ткани между первым элементом бранши 502A и вторым элементом бранши 502B. Первый элемент бранши 502A содержит наклоненные контактирующие с тканью поверхности 504A и 506A. Второй элемент бранши 502B содержит наклоненные контактирующие с тканью поверхности 504B и 506B. Первый элемент бранши 502A содержит первую наклоненную под положительным углом контактирующую с тканью поверхность 504A и первую наклоненную под отрицательным углом контактирующую с тканью поверхность 506A. Второй элемент бранши 502B содержит вторую наклоненную под положительным углом контактирующую с тканью поверхность 504B и вторую наклоненную под отрицательным углом контактирующую с тканью поверхность 506B.
При использовании в настоящем документе термины «наклоненный под положительным углом» и «наклоненный под отрицательным углом» обозначают направление, в котором наклонена контактирующая с тканью поверхность относительно корпуса элемента бранши, содержащего контактирующую с тканью поверхность и зажимную плоскость элемента бранши. На ФИГ. 138 первый элемент бранши 502A' и второй элемент бранши 502B' показаны в закрытом положении, например, для зажатия ткани между противоположными элементами бранши 502A' и 502B'. Закрытое положение аналогично закрытому положению, показанному на ФИГ. 133, 134, 135, 137 и 142. Первый элемент бранши 502A' содержит корпус первой бранши 503A', первый захватывающий ткань элемент 507A' и первую зажимную плоскость 505A. Второй элемент бранши 502B' содержит корпус второй бранши 503B', второй захватывающий ткань элемент 507B' и вторую зажимную плоскость 505B. По существу захватывающие ткань элементы и зажимные плоскости элементов бранши концевого эффектора имеют противоположную ориентацию, когда элементы бранши находятся в закрытом положении, чтобы зажать ткань между противоположными элементами бранши.
Первый элемент бранши 502A' содержит первую наклоненную под положительным углом контактирующую с тканью поверхность 504A', формирующую угол (α) с первой зажимной плоскостью 505A и направленную от корпуса первой бранши 503A' на периферии первого захватывающего ткань элемента 507A' первого элемента бранши 502A'. Первый элемент бранши 502A' содержит первую наклоненную под отрицательным углом контактирующую с тканью поверхность 506A', формирующую угол (α) с первой зажимной плоскостью 505A и направленную к корпусу первой бранши 503A' на периферии первого захватывающего ткань элемента 507A' первого элемента бранши 502A'.
Соответственно, при использовании в настоящем документе термин «наклоненный под положительным углом» обозначает контактирующие с тканью поверхности, которые отклоняются от зажимной плоскости и наклонены в направлении от корпуса бранши на периферии захватывающей ткань части элемента бранши, содержащего наклоненную под положительным углом контактирующую с тканью поверхность. Аналогично при использовании в настоящем документе термин «наклоненный под отрицательным углом» обозначает контактирующие с тканью поверхности, которые отклоняются от зажимной плоскости и наклонены к корпусу бранши на периферии захватывающей ткань части элемента бранши, содержащего наклоненную под отрицательным углом контактирующую с тканью поверхность.
Таким образом, второй элемент бранши 502B' содержит вторую наклоненную под положительным углом контактирующую с тканью поверхность 504B', формирующую угол (α) со второй зажимной плоскостью 505B и направленную от корпуса второй бранши 503B' на периферии второго захватывающего ткань элемента 507B' второго элемента бранши 502B'. Второй элемент бранши 502B' содержит вторую наклоненную под отрицательным углом контактирующую с тканью поверхность 506A', формирующую угол (α) со второй зажимной плоскостью 505B и направленную к корпусу второй бранши 503B' на периферии второго захватывающего ткань элемента 507B' второго элемента бранши 502B'.
Как также показано на ФИГ. 132-134, первый элемент бранши 502A содержит корпус первой бранши 503A и первый захватывающий ткань элемент 507A, а второй элемент бранши 502B содержит корпус второй бранши 503B и второй захватывающий ткань элемент 507B. Первая наклоненная под положительным углом контактирующая с тканью поверхность 504A первого элемента бранши 502A наклонена от корпуса первой бранши 503A на периферии первого захватывающего ткань элемента 507A. Первая наклоненная под отрицательным углом контактирующая с тканью поверхность 506A первого элемента бранши 502A наклонена к корпусу первой бранши 503A на периферии первого захватывающего ткань элемента 507A. Вторая наклоненная под положительным углом контактирующая с тканью поверхность 504B второго элемента бранши 502B наклонена от корпуса второй бранши 503B на периферии второго захватывающего ткань элемента 507B. Вторая наклоненная под отрицательным углом контактирующая с тканью поверхность 506B второго элемента бранши 502B наклонена к корпусу второй бранши 503B на периферии второго захватывающего ткань элемента 507B.
Когда первый элемент бранши 502A и второй элемент бранши 502B находятся в закрытом положении, зажимая ткань между первым и вторым элементами бранши, первая наклоненная под положительным углом контактирующая с тканью поверхность 504A расположена напротив второй наклоненной под отрицательным углом контактирующей с тканью поверхности 506B. Когда первый элемент бранши 502A и второй элемент бранши 502B находятся в закрытом положении, зажимая ткань между первым и вторым элементами бранши, первая наклоненная под отрицательным углом контактирующая с тканью поверхность 506A расположена напротив второй наклоненной под положительным углом контактирующей с тканью поверхности 504B.
Как показано на ФИГ. 132-133 и 136-137, первая наклоненная под положительным углом контактирующая с тканью поверхность 504A и первая наклоненная под отрицательным углом контактирующая с тканью поверхность 506A расположены по существу вдоль всей длины первого элемента бранши 502A. Вторая наклоненная под положительным углом контактирующая с тканью поверхность 504B и вторая наклоненная под отрицательным углом контактирующая с тканью поверхность 506B расположены по существу вдоль всей длины второго элемента бранши 502B.
Концевой эффектор 500 содержит двутавровый элемент 508, который в некоторых вариантах осуществления может выполнять функцию закрывающего элемента и/или разрезающего ткань элемента. Двутавровый элемент 508 может работать так, как описано выше в данном документе применительно к перемещаемому по оси элементу 3016, описанному выше в настоящем документе. Двутавровый элемент 508 может быть выполнен по форме и размеру таким образом, чтобы по меньшей мере частичной вставляться в каналы в первом элементе бранши 502A и втором элементе бранши 502B. Двутавровый элемент 508 может функционально поступательно перемещаться вдоль каналов в первом элементе бранши 502A и втором элементе бранши 502B, например, между первым, проксимально оттянутым положением, соответствующим открытому положению элементов бранши 502A и 502B, и вторым, дистально продвинутым положением, соответствующим закрытому положению элементов бранши 502A и 502B. Таким образом, например, двутавровый элемент 508 может быть выполнен с возможностью функционального поступательного перемещения внутри каналов первого и второго элементов бранши 502A и 502B с закрытием элементов бранши под воздействием кулачка и/или с продвижением режущего элемента через первый и второй захватывающие ткань элементы 507A и 507B для рассечения ткани, зажатой между первым и вторым элементами бранши 502A и 502B.
Перемещение первого элемента бранши 502A относительно второго элемента бранши 502B между открытым положением (ФИГ. 132 и 136) и закрытым положением (ФИГ. 133, 134 и 137) с зажатием ткани между первым элементом бранши 502A и вторым элементом бранши 502B можно инициировать с помощью подходящего закрывающего исполнительного механизма. Поступательное перемещение двутаврового элемента между оттянутым положением и продвинутым положением можно инициировать при помощи подходящего исполнительного механизма осуществления поступательного перемещения. Подходящие закрывающие исполнительные механизмы и подходящие исполнительные механизмы осуществления поступательного перемещения описаны, например, применительно к ФИГ. 64-82, 83-91 и 92-96.
Как показано на ФИГ. 139 и 140, концевой эффектор 510 содержит первый элемент бранши 512A и второй элемент бранши 512B. Первый элемент бранши 512A может быть выполнен с возможностью перемещения относительно второго элемента бранши 512B между открытым положением (ФИГ. 139 и 140) и закрытым положением (не показано) с зажатием ткани между первым элементом бранши 512A и вторым элементом бранши 512B. Первый элемент бранши 512A содержит наклоненные контактирующие с тканью поверхности 514A и 516A. Второй элемент бранши 512B содержит наклоненные контактирующие с тканью поверхности 514B и 516B. Первый элемент бранши 512A содержит первую наклоненную под положительным углом контактирующую с тканью поверхность 514A и первую наклоненную под отрицательным углом контактирующую с тканью поверхность 516A. Второй элемент бранши 512B содержит вторую наклоненную под положительным углом контактирующую с тканью поверхность 514B и вторую наклоненную под отрицательным углом контактирующую с тканью поверхность 516B.
Первый элемент бранши 512A содержит корпус первой бранши 513A и первый захватывающий ткань элемент 517A, а второй элемент бранши 512B содержит корпус второй бранши 513B и второй захватывающий ткань элемент 517B. Первая наклоненная под положительным углом контактирующая с тканью поверхность 514A первого элемента бранши 512A наклонена от корпуса первой бранши 513A на периферии первого захватывающего ткань элемента 517A. Первая наклоненная под отрицательным углом контактирующая с тканью поверхность 516A первого элемента бранши 512A наклонена к корпусу первой бранши 513A на периферии первого захватывающего ткань элемента 517A. Вторая наклоненная под положительным углом контактирующая с тканью поверхность 514B второго элемента бранши 512B наклонена от корпуса второй бранши 513B на периферии второго захватывающего ткань элемента 517B. Вторая наклоненная под отрицательным углом контактирующая с тканью поверхность 516B второго элемента бранши 512B наклонена к корпусу второй бранши 513B на периферии второго захватывающего ткань элемента 517B.
Когда первый элемент бранши 512A и второй элемент бранши 512B находятся в закрытом положении, зажимая ткань между первым и вторым элементами бранши, первая наклоненная под положительным углом контактирующая с тканью поверхность 514A расположена напротив второй наклоненной под отрицательным углом контактирующей с тканью поверхности 516B. Когда первый элемент бранши 512A и второй элемент бранши 512B находятся в закрытом положении, зажимая ткань между первым и вторым элементами бранши, первая наклоненная под отрицательным углом контактирующая с тканью поверхность 516A расположена напротив второй наклоненной под положительным углом контактирующей с тканью поверхности 514B.
Первая наклоненная под положительным углом контактирующая с тканью поверхность 514A расположена вдоль проксимальной части длины первого элемента бранши 512A. Вторая наклоненная под положительным углом контактирующая с тканью поверхность 514B расположена вдоль проксимальной части длины второго элемента бранши 512B. Первая наклоненная под отрицательным углом контактирующая с тканью поверхность 516A расположена по существу вдоль всей длины первого элемента бранши 512A. Вторая наклоненная под отрицательным углом контактирующая с тканью поверхность 516B расположена по существу вдоль всей длины второго элемента бранши 502B.
Концевой эффектор 510 содержит двутавровый элемент 518, который в некоторых вариантах осуществления может выполнять функцию закрывающего элемента и/или разрезающего ткань элемента. Двутавровый элемент 518 может быть выполнен по форме и размеру таким образом, чтобы по меньшей мере частично вставляться в каналы в первом элементе бранши 512A и втором элементе бранши 512B. Двутавровый элемент 518 может поступательно перемещаться вдоль каналов в первом элементе бранши 512A и втором элементе бранши 512B, например, между первым, проксимально оттянутым положением, соответствующим открытому положению элементов бранши 512A и 512B, и вторым, дистально продвинутым положением, соответствующим закрытому положению элементов бранши 512A и 512B. Таким образом, например, двутавровый элемент 518 может быть выполнен с возможностью функционального поступательного перемещения внутри каналов первого и второго элементов бранши 512A и 512B с закрытием элементов бранши под воздействием кулачка и/или с продвижением режущего элемента через первый и второй захватывающие ткань элементы 517A и 517B для рассечения ткани, зажатой между первым и вторым элементами бранши 512A и 512B.
Перемещение первого элемента бранши 512A относительно второго элемента бранши 512B между открытым положением (ФИГ. 139 и 140) и закрытым положением (не показано) с зажатием ткани между первым элементом бранши 512A и вторым элементом бранши 512B можно инициировать с помощью подходящего закрывающего исполнительного механизма. Поступательное перемещение двутаврового элемента между оттянутым положением и продвинутым положением можно инициировать при помощи подходящего исполнительного механизма осуществления поступательного перемещения. Подходящие закрывающие исполнительные механизмы и подходящие исполнительные механизмы осуществления поступательного перемещения описаны, например, применительно к ФИГ. 64-82, 83-91 и 92-96.
Первый элемент бранши 512A и второй элемент бранши 512B содержат первую дистальную текстурированную часть 519A и вторую дистальную текстурированную часть 519B соответственно. Первая дистальная текстурированная часть 519A первого элемента бранши 512A расположена дистально и непосредственно смежно с проксимальным захватывающим ткань элементом 517A первого элемента бранши 512A, содержащего первую наклоненную под положительным углом контактирующую с тканью поверхность 514A. Первая наклоненная под положительным углом контактирующая с тканью поверхность 514A не проходит дистально вдоль длины первого элемента бранши 512A в первую дистальную текстурированную часть 519A. Вторая дистальная текстурированная часть 519B второго элемента бранши 512B расположена дистально и непосредственно смежно относительно проксимального захватывающего ткань элемента 517B второго элемента бранши 512B, содержащего вторую наклоненную под положительным углом контактирующую с тканью поверхность 514B. Вторая наклоненная под положительным углом контактирующая с тканью поверхность 514B не проходит дистально вдоль длины второго элемента бранши 512B во вторую дистальную текстурированную часть 519B. Первая и вторая дистальные текстурированные части 519A и 519B первого и второго элементов бранши 512A и 512B могут быть расположены напротив друг друга и могут обеспечивать концевому эффектору 510 возможность захвата, пропускания и/или манипулирования хирургическими инструментами, такими как, например, иглы для сшивания ткани, наряду с возможностью зажимания ткани, например, в течение операций по рассечению. Данная функциональность захвата, пропускания и/или манипулирования описана, например, применительно к ФИГ. 116-131 и 154-164.
Первый элемент бранши 512A и второй элемент бранши 512B содержат первую захватывающую часть 521A и вторую захватывающую часть 521B соответственно. Первая захватывающая часть 521A расположена на направленной наружу поверхности первого элемента бранши 512A, и вторая захватывающая часть 521B расположена на направленной наружу поверхности второго элемента бранши 512B. Захватывающие части 521A и 521B могут способствовать рассечению ткани, например, как описано применительно к ФИГ. 116-131 и 154-164.
На ФИГ. 141 представлен вид в перспективе концевого эффектора 510', аналогичного концевому эффектору 510, представленному на ФИГ. 139 и 140, но содержащего электроды 522, расположенные во втором захватывающем ткань элементе 517B второго элемента бранши 516B и находящиеся между второй наклоненной под положительным углом контактирующей с тканью поверхностью 514B и второй наклоненной под отрицательным углом контактирующей с тканью поверхностью 516B. Электроды 522 могут быть выполнены с возможностью подачи РЧ-энергии на ткань, зажатую между первым элементом бранши 512A и вторым элементом бранши 512B, находящимися в закрытом положении, для соединения/спайки ткани, которую можно рассечь поступательным перемещением двутаврового элемента 518, содержащего режущий элемент. Хотя на ФИГ. 141 представлены два электрода 522, следует понимать, что концевой эффектор в соответствии с вариантами осуществления, описанными в настоящем документе, может содержать по меньшей мере один или более электродов, имеющих любую подходящую форму и ориентацию, например, описанные в настоящем документе. Второй элемент бранши 516B также содержит смещенный электрод 524 на дистальном кончике 525, выполненном с возможностью подачи РЧ-энергии на ткань, например, в течение операций по рассечению. В некоторых вариантах осуществления первая дистальная текстурированная часть 519A и вторая дистальная текстурированная часть 519B также могут представлять собой электроды, например, выполненные с возможностью подачи РЧ-энергии на ткань в течение операций по рассечению. Данная функциональность электрода описана, например, применительно к ФИГ. 154-164.
Как показано на ФИГ. 142, концевой эффектор 530 содержит первый элемент бранши 532A и второй элемент бранши 532B, которые представлены в закрытом положении, с тканью 545, зажатой между элементами бранши. Первый элемент бранши 532A содержит первую наклоненную под положительным углом контактирующую с тканью поверхность 534A и первую наклоненную под отрицательным углом контактирующую с тканью поверхность 536A. Второй элемент бранши 532B содержит вторую наклоненную под положительным углом контактирующую с тканью поверхность 534B и вторую наклоненную под отрицательным углом контактирующую с тканью поверхность 536B. Ткань 545 физически контактирует с наклоненными под углом контактирующими с тканью поверхностями 534A, 534B, 536A и 536B. Физический контакт между тканью 545 и наклоненными контактирующими с тканью поверхностями 534A, 534B, 536A и 536B зажимает ткань 545 между первым элементом бранши 532A и вторым элементом бранши 532B. Как показано на ФИГ. 142, при зажатии ткани между первым элементом бранши 532A и вторым элементом бранши 532B ткань 545 сдавливается между противоположными друг другу контактирующими с тканью поверхностями 536A и 534B, а также между противоположными друг другу контактирующими с тканью поверхностями 534A и 536B, в результате обеспечивается извилистая деформация сжатой ткани 545. Извилистая деформация улучшает зажимное воздействие концевого эффектора 530 на ткань 545, что в свою очередь улучшает спайку/слияние ткани 545 и/или разрезание ткани 545. Ткань 545 можно соединить/сплавить, например, путем применения РЧ-энергии через электроды 542, находящиеся в захватывающем ткань элементе второго элемента бранши 532B, размещенные между второй наклоненной под положительным углом контактирующей с тканью поверхностью 534B и второй наклоненной под отрицательным углом контактирующей с тканью поверхностью 536B. Ткань 545 можно рассекать, например, путем поступательного перемещения двутаврового элемента 538, поступательно перемещающего режущий элемент 541 через зажатую ткань 545.
В некоторых вариантах осуществления концевой эффектор может содержать первый элемент бранши, который содержит первую наклоненную под положительным углом контактирующую с тканью поверхность и первую наклоненную под отрицательным углом контактирующую с тканью поверхность, а также второй элемент бранши, который содержит вторую наклоненную под положительным углом контактирующую с тканью поверхность и вторую наклоненную под отрицательным углом контактирующую с тканью поверхность. Наклоненные контактирующие с тканью поверхности могут образовывать углы (α) относительно зажимной плоскости, как описано, например, применительно к ФИГ. 138. Величина угла (α) между контактирующей с тканью поверхностью и зажимной плоскостью может находиться в диапазоне от 5 до 85 градусов или в любом входящем в него диапазоне, как например, от 10 до 80 градусов, от 20 до 70 градусов, от 30 до 60 градусов, от 40 до 50 градусов, от 25 до 50 градусов или от 30 до 45 градусов.
В некоторых вариантах осуществления наклоненные контактирующие с тканью поверхности могут независимо образовывать углы к соответствующим зажимным плоскостям. Угол, образованный наклоненными контактирующими с тканью поверхностями, в данном концевом эффекторе может быть, по существу, одинаковым или отличающимся. Например, две противоположные наклоненные контактирующие с тканью поверхности (например, первая наклоненная под положительным углом контактирующая с тканью поверхность и противоположная ей вторая наклоненная под отрицательным углом контактирующая с тканью поверхность) могут образовывать общий угол (α1) относительно соответствующих зажимных плоскостей, а две другие противоположные наклоненные контактирующие с тканью поверхности (например, первая наклоненная под отрицательным углом контактирующая с тканью поверхность и противоположная ей вторая наклоненная под положительным углом контактирующая с тканью поверхность) могут образовывать общий угол (α2) относительно соответствующих зажимных плоскостей, причем ⎥α1⎢≠⎥α2⎢.
В некоторых вариантах осуществления наклоненная контактирующая с тканью поверхность может проходить заданное расстояние перпендикулярно соответствующей зажимной плоскости, совпадающей с горизонтальной контактирующей с тканью частью элемента бранши. Например, как показано на ФИГ. 138, первая наклоненная под положительным углом контактирующая с тканью поверхность 504A' проходит некоторое расстояние перпендикулярно первой зажимной плоскости 505A, и вторая наклоненная под положительным углом контактирующая с тканью поверхность 504B' проходит некоторое расстояние перпендикулярно второй зажимной плоскости 505B. Аналогично первая наклоненная под отрицательным углом контактирующая с тканью поверхность 506A' проходит некоторое расстояние перпендикулярно первой зажимной плоскости 505A, и вторая наклоненная под отрицательным углом контактирующая с тканью поверхность 506B' проходит некоторое расстояние перпендикулярно второй зажимной плоскости 505B. В некоторых вариантах осуществления наклоненная контактирующая с тканью поверхность может проходить перпендикулярно соответствующей зажимной плоскости на расстояние в диапазоне от 0,064 см до 0,64 см (от 0,025 дюйма до 0,25 дюйма) или в любом входящем в него поддиапазоне, таком как, например, от 0,064 см до 0,03 см или от 0,064 см до 0,1 см (от 0,025 дюйма до 0,01 дюйма или от 0,025 дюйма до 0,05 дюйма).
Хотя наклоненные контактирующие с тканью поверхности, показанные на ФИГ. 132-142, показаны в виде плоских поверхностей, следует понимать, что в некоторых вариантах осуществления наклоненные контактирующие с тканью поверхности могут представлять собой изогнутые поверхности или комбинацию плоских и изогнутых поверхностей.
В некоторых вариантах осуществления концевые эффекторы, содержащие наклоненные контактирующие с тканью поверхности, могут быть выполнены с возможностью функционального соединения с роботизированными хирургическими системами, например, роботизированными хирургическими системами, описанными применительно к ФИГ. 1-45. В некоторых вариантах осуществления концевые эффекторы, содержащие наклоненные контактирующие с тканью поверхности, могут быть выполнены с возможностью функционального соединения с портативными хирургическими устройствами, например, портативными хирургическими устройствами, описанными применительно к ФИГ. 46-63.
Наклоненные контактирующие с тканью поверхности, описанные применительно к ФИГ. 132-142, обеспечивают различные преимущества для хирургических эффекторов, выполненных с возможностью захвата/зажима ткани, соединения/спайки ткани, рассечения ткани и любых комбинаций данных операций. Например, в некоторых вариантах осуществления, как показано на ФИГ. 132-142, наклоненные под положительным углом контактирующие с тканью поверхности выполнены заодно с внешними поверхностями элементов бранши (т.е. выполнены из одной части материала). По существу наклоненные под положительным углом контактирующие с тканью поверхности обеспечивают более широкую структуру элемента бранши в направлении его толщины (обозначено измерением T на ФИГ. 141 и 142). Более широкая структура элемента бранши повышает прочность и жесткость элементов бранши, что позволяет прилагать повышенную захватывающую/зажимающую нагрузку к ткани. В некоторых вариантах осуществления, например, более широкая структура элемента бранши, обеспечиваемая наклоненными под положительным углом контактирующими с тканью поверхностями, может увеличивать момент инерции элементов бранши на 20-30% по сравнению с элементами бранши, имеющими параллельные друг другу контактирующие с тканью поверхности. Увеличенный момент инерции может обеспечить улучшение параметров зоны сплавления при соединении и прижигании ткани, зажатой в концевом эффекторе, содержащем наклоненные контактирующие с тканью поверхности, обеспечивая более фокусированную зону для поступления РЧ-энергии и сплавления ткан.
Любые электрохирургические инструменты, описанные в настоящем документе, могут получать питание с использованием токовых контуров, идущих от генератора или другого источника сигналов (например, генератора 3002), по проводникам, таким как подающий 3012 и возвратный 3014 проводники (см. ФИГ. 6), через узел стержня к электроду или к электродам. Внутри узла стержня токовые контуры могут быть представлены проводами, проходящими через узел стержня. Однако провода должны быть выполнены с возможностью предотвращения сгибания, скручивания или иной деформации в различных шарнирных и поворотных соединениях инструментов, включая шарнирное сочленение 3500, описанное в настоящем документе. В показанных вариантах осуществления в электрохирургическом инструменте компоненты узла стержня можно использовать в качестве токовых контуров для подачи питания к электрохирургическим электродам. Это позволяет устранить необходимость в проводах, а также упростить шарнирный поворот и поворот хирургического инструмента.
В представленных вариантах осуществления можно использовать узел поворотного соединителя, чтобы поворотный приводной стержень или другие компоненты узла стержня могли обеспечить токовый контур между генератором и концевым эффектором и/или его электродами. Поворотный соединитель может быть выполнен с возможностью сохранения соединения между запитанным токовым контуром и концевым эффектором, несмотря на поворот стержня и/или концевого эффектора. В биполярных конфигурациях возвратный контур можно образовать проводящими компонентами стержня и концевого эффектора, такими как, например, оболочка стержня, двутаврового элемента или иного скальпеля, части различных элементов бранши и т.п., как описано в настоящем документе.
На ФИГ. 143-146 представлен один вариант осуществления узла поворотного соединителя 1100, установленного в концевом эффекторе 550 и узле стержня 560, как описано в настоящем документе применительно к ФИГ. 64-81. На ФИГ. 143 представлен вид в поперечном сечении одного варианта осуществления концевого эффектора 550 и узла стержня 560, показывающий пример установки узла поворотного электрода 1100. На ФИГ. 144 представлен вид с пространственным разделением компонентов одного варианта осуществления концевого эффектора 550 и узла стержня 560, показывающий поворотный узел электродов 1100, установленный на поворотном приводном стержне 630 (обозначен номерами 1100', 1102', 1104'), и в разобранном виде (обозначен номерами 1100, 1102, 1104). На ФИГ. 145 представлен вид в поперечном сечении одного варианта осуществления концевого эффектора 550 и узла стержня 560, показывающий узел 1100 поворотного электрода с поворотной приводной головкой 632 в проксимальном положении. На ФИГ. 146 представлен вид в поперечном сечении одного варианта осуществления концевого эффектора 550 и узла стержня 560, показывающий узел 1100 поворотного электрода с поворотной приводной головкой 632 в дистальном положении.
Поворотный электродный узел 1100 может располагаться внутри корпуса привода концевого эффектора 608 и может содержать внешний контакт 1102 и внутренний контакт 1103. Внешний контакт 1102 может быть расположен вокруг внутренней стенки корпуса привода концевого эффектора 608. В показанном варианте осуществления и в функционально аналогичных вариантах осуществления внешний контакт 1102 может иметь форму цилиндра или иной фигуры вращения. Внешний контакт 1102 может находиться в электрической связи с одним или более электродами 1112 в концевом эффекторе 550 посредством одного или более проводов, таких как провода 1110. Провод 1110 может физически контактировать с внешним контактом 1102 и может проходить через нижний элемент бранши 602B к электроду 1112, как показано на фигуре. Провод 1110 может быть присоединен к электроду 1112 любым подходящим способом, включая, например, пайку или иное аналогичное соединение. Например, можно использовать множество запитанных энергией электродов, где к каждому электроду подходит один провод 1110. В показанном варианте осуществления провод 1110 может быть изолированным, чтобы избежать электрического контакта с другими частями концевого эффектора 550 и узла стержня 560.
Внутренний контакт 1103 может быть физически соединен с поворотным приводным стержнем 630, например, проксимально относительно шестигранной соединительной части 634, как показано на фигуре. Внутренний контакт 1103 может иметь электрический контакт с внешним контактом 1102. Например, внутренний контакт 1103 может физически контактировать с внешним контактом 1102. В показанном варианте осуществления и в функционально аналогичных вариантах осуществления внутренний контакт 1103 может удерживаться в электрическом контакте с внешним контактом 1102 при повороте поворотного приводного стержня 630 и/или концевого эффектора 560. Например, внешний контакт 1102 может представлять собой фигуру вращения, в результате чего внутренний контакт 1103 будет находиться в физическом контакте с контактом 1102 при повороте поворотного приводного стержня 630.
В показанном варианте осуществления и в функционально аналогичных вариантах осуществления внутренний контакт 1103 также может иметь форму фигуры вращения. Например, как показано на фигуре, внутренний контакт 1103 может содержать кольцевую щетку 1104 и желобчатый проводник 1106. Желобчатый проводник 1106 может располагаться вокруг поворотного приводного стержня 630 проксимально относительно шестигранной соединительной части 634. Желобчатый проводник 1106 может образовывать желоб 1107, в который принимается кольцевая щетка 1104. Кольцевая щетка 1104 может иметь диаметр, который больше диаметра желоба 1107. В показанном варианте осуществления и в функционально аналогичных вариантах осуществления в кольцевой щетке 1104 может быть выполнен паз 1105. Например, паз 1105 может позволять увеличивать и уменьшать диаметр кольцевой щетки 1104. Например, диаметр кольцевой щетки 1104 можно увеличить, чтобы ее можно было поместить на оставшуюся часть желобчатого проводника 1106 и вставить в паз 1107. Кроме того, после установки внутреннего контакта 1103 внутрь внешнего контакта 1102 его диаметр можно уменьшить Таким образом, склонность кольцевой щетки 1104 восстанавливать исходный диаметр может вызывать то, что кольцевая щетка 1104 будет прилагать направленное наружу усилие к внешнему контакту 1102, способствуя удержанию кольцевой щетки 1104 и внешнего контакта 1102 в физическом и электрическом контакте друг с другом.
Внутренний контакт 1103 может находиться в электрической связи с подходящим компонентом стержня, тем самым замыкая токовый контур от электрода 1112 к генератору, например, генератору 3002, описанному выше в настоящем документе применительно к ФИГ. 6, и/или внутреннему генератору. В показанном варианте осуществления внутренний контакт 1103 и особенно желобчатый проводник 1106 находятся в физическом и электрическом контакте со спиральным проволочным компонентом 1114, намотанным вокруг поворотного приводного стержня 630. Спиральный проволочный компонент 1114 может проходить проксимально через стержень, где он может быть прямо или опосредованно соединен с генератором. Как описано в настоящем документе, спиральный проволочный компонент 1114 также может функционировать в качестве пружины, обеспечивая жесткость поворотного приводного стержня 630 рядом с шарнирным сочленением, например, как описано в настоящем документе применительно к ФИГ. 31-31 и пружине 3612. В некоторых вариантах осуществления поворотный приводной стержень 630 может содержать внешнюю изолированную гильзу. Внутренний контакт 1103 может находиться в электрической связи с внешней изолированной гильзой наряду или вместо соединения со спиральным проволочным компонентом 1114. Пример изолированной гильзы 1166 описан в настоящем документе применительно к ФИГ. 151. Другим примером потенциальной изолированной гильзы является ограничительный элемент 3660, описанный выше в настоящем документе применительно к ФИГ. 45.
В показанном варианте осуществления возвратный контур от электрода 1112 может быть образован различными компонентам концевого эффектора 550 и узла стержня 560, включая, например, элементы бранши 602A, 602B, корпус привода концевого эффектора 608 и другие элементы стержня, проходящие проксимально. Соответственно, части запитанного энергией токового контура могут быть электрически изолированы от других компонентов концевого эффектора 550 и узла стержня 560. Например, как описано выше, провод 1110 между внешним контактом 1102 и электродом 1112 может быть окружен электрическим изолятором 1111, как показано на фигуре. Кроме того, внешний контакт 1102 и внутренний контакт 1103 могут быть изолированы от других компонентов концевого эффектора 550 и узла стержня 560. Например, изолятор 1118 может быть расположен так, чтобы электрически изолировать внешний контакт 1102 от корпуса привода концевого эффектора 608. Изолятор 1116 может быть расположен так, чтобы изолировать внешний контакт 1102 и внутренний контакт 1103 от поворотного приводного стержня 630. Изолятор 1118 может представлять собой дополнительный компонент или в некоторых случаях может быть выполнен в виде покрытия из тефлона или иного изолирующего покрытия. Как показано на ФИГ. 145-146, изолятор 1116 может проходить проксимально, также изолируя спиральный проволочный компонент 1114 как от поворотного приводного стержня 630, так и от других компонентов узла стержня 560, например, от корпуса привода концевого эффектора 608.
В варианте осуществления, представленном на ФИГ. 145-146, внешний контакт 1102 может выдвигаться проксимально и дистально, так что электрический контакт между внешним контактом 1102 и внутренним контактом 1103 сохраняется при нахождении поворотного приводного стержня 630 и поворотной приводной головки 632 в различных проксимальных и дистальных положениях. Например, как показано на ФИГ. 145, поворотный приводной стержень 630 и поворотная приводная головка 632 оттягиваются проксимально, так что штифтовая шестигранная соединительная часть 636 головки приводного стержня 632 принимается гнездовой шестигранной соединительной частью 609 корпуса привода концевого эффектора 608. В данном положении поворот поворотного приводного стержня 630 может вызывать поворот корпуса привода концевого эффектора 608 и концевого эффектора 550, как описано в настоящем документе. Кроме того, как показано на ФИГ. 145, внутренний контакт 1103 может находиться в физическом и электрическом контакте с внешним контактом 1102. Как показано на ФИГ. 146, поворотный приводной стержень 630 и поворотная приводная головка 632 толкаются дистально, так что штифтовая шестигранная соединительная часть 634 поворотной приводной головки 632 принимает резьбовую поворотную приводную гайку 606. В данном положении поворот поворотного приводного стержня 630 может вызывать поворот резьбовой поворотной приводной гайки 606, который в свою очередь вызывает поворот резьбового поворотного приводного элемента 604 и дистальное и/или проксимальное поступательное перемещение двутаврового элемента 620. Кроме того, как показано на ФИГ. 146, внутренний контакт 1103 может находиться в физическом и электрическом контакте с внешним контактом 1102.
На ФИГ. 147-148 представлены виды в поперечном сечении одного варианта осуществления концевого эффектора 550 и узла стержня 560, где продольная длина внешнего контакта 1108 выбрана таким образом, чтобы узел поворотного соединителя 1100 попеременно устанавливал и разрывал электрический контакт, ограниченный продольным положением внутреннего контакта 1103. Например, как показано на ФИГ. 147, поворотный приводной стержень 630 и поворотная приводная головка 632 располагаются проксимально, так что штифтовая шестигранная соединительная часть 636 принимается гнездовой шестигранной соединительной частью 609 дистальной части стержня 608. Как показано на фигуре, внутренний контакт 1103 (и, в частности, кольцевая щетка 1104) может приводиться в контакт не с контактом 1102, а с изолятором 1108. Таким образом, когда поворотный приводной стержень 630 и поворотная приводная головка 632 находятся в проксимальном положении, показанном на ФИГ. 147, не может образоваться электрическая связь между электродом 1112 и генератором. Когда поворотный приводной стержень 630 и поворотная приводная головка 632 расположены дистально и входят в контакт с резьбовой приводной гайкой 606, как показано на ФИГ.148, внутренний контакт 1103 может входить в электрический (и физический) контакт с контактом 1102, замыкая токовый контур между электродом 1112 и генератором. Конфигурацию, показанную на ФИГ. 147-148, можно использовать в различных ситуациях. Например, может быть нежелательно, чтобы при открытых элементах бранши 602A, 602B на электрод 1112 подавалось питание. В показанном варианте осуществления элементы бранши 602A, 602B закрываются поворотным приводным стержнем 630, когда стержень 630 расположен дистально (ФИГ. 148) и не закрываются, когда стержень 630 расположен проксимально (ФИГ. 147). Соответственно, в конфигурации, показанной на ФИГ. 147-148, токовый контур от генератора к электроду 1112 замыкается только тогда, когда поворотный приводной стержень 630 и поворотная приводная головка 632 расположены дистально.
В некоторых вариантах осуществления, описанных в настоящем документе, концевой эффектор 550 может быть выполнен с возможностью извлечения из корпуса привода концевого эффектора 608 и, например, замены на другие концевые эффекторы (не показаны). Примеры механизмов для осуществления взаимозаменяемых электродов представлены в настоящем документе применительно к ФИГ. 106-115. В таких вариантах осуществления провод 1110 может содержать часть концевого эффектора и часть стержня, связанные соединительным узлом. На ФИГ. 149-150 представлен один вариант осуществления концевого эффектора 550 и узла стержня 560, показывающий конфигурацию с частями провода 1130, 1132 и соединительным узлом 1120. Например, как показано на ФИГ. 149-150 и как описано в настоящем документе, проксимальная часть 603 элемента бранши 602B может приниматься внутрь корпуса привода концевого эффектора 608. На ФИГ. 149 проксимальная часть 603 элемента бранши 602B показана внутри корпуса привода концевого эффектора 608, и на ФИГ. 150 она показана отделенной от корпуса привода концевого эффектора 608. Соединительный узел 1120 может содержать находящийся на стороне концевого эффектора провод 1122 и находящийся на стороне стержня провод 1124. Соответствующие провода могут входить в физический и электрический контакт друг с другом при принятии проксимальной части 603 в дистальную часть стержня 608, как показано на ФИГ. 149. В различных вариантах осуществления соединительный узел 1120 может быть выполнен с возможностью сохранения электрической изоляции запитанного токового контура от других компонентов концевого эффектора 550 и стержня 560. Например, с помощью изоляции 1126, 1128 можно электрически изолировать соединительные провода 1122, 1124. В показанном варианте осуществления и в функционально аналогичных вариантах осуществления изоляция 1126, 1128 может иметь форму пластиковых или других изолирующих усаживаемых трубок, установленных по всей длине или части длины проводов 1122, 1124. В некоторых вариантах осуществления изоляция 1126, 1128 может представлять собой покрытие из тефлона или другое изолирующее покрытие, нанесенное на участки проводов 1122, 1124 и/или на окружающий материал.
На ФИГ. 151 представлен вид в поперечном сечении альтернативного варианта осуществления концевого эффектора 1140 и узла стержня 1142, показывающий другую ситуацию, в которой можно использовать узел 1147 поворотного соединителя. Концевой эффектор 1140 может содержать элементы бранши 1146A, 1146B, функционирующие аналогично элементам бранши 3008A, 3008B, 602A, 602B и т.п., описанным выше в настоящем документе. Например, элементы бранши 1146A, 1146B можно активировать двутавровым элементом 1156, который в показанном варианте осуществления может содержать режущий край 1148 для разрезания ткани между элементами бранши 1146A, 1146B. Двутавровый элемент 1156 может приводиться в движение дистально и проксимально путем поворота резьбового стержня двутаврового элемента 1154. Стержень двутаврового элемента 1154 может активироваться главным приводным стержнем 1149. Например, главный приводной стержень 1149 может быть соединен с шестерней 1150. Шестерня 1150 может быть механически соединена с шестерней 1152, которая соединена со стержнем двутаврового элемента 1154, как показано на фигуре.
Концевой эффектор 1140 может содержать электрод 1158, функционирующий аналогично электроду 1112 и т.п., описанному выше в настоящем документе. Изолированный провод 1160 может быть электрически соединен с электродом 1158 и может проходить проксимально к внешнему контакту 1162. Внешний контакт 1162 может находиться на внутренней стенке элемента стержня 1141 аналогично тому, как контакт 1102 соединяется с внутренней стенкой 1108 корпуса привода концевого эффектора 608. Внутренний контакт 1164 (например, щетка) может располагаться вокруг главного приводного стержня 1149 таким образом, что щетка 1164 будет иметь электрический контакт с контактом 1162. Щетка 1164 также может иметь электрический контакт с проводящей гильзой 1166, расположенной вокруг главного приводного стержня 1149. Гильза 1166 может быть электрически изолирована от главного приводного стержня 1149 и от оставшейся части стержня 1142, например, изоляторами 1168, 1170.
Следует понимать, что поворотный узел электрода 1100 можно использовать с любыми вариантами осуществления концевого эффектора и/или узла стержня, описанными в настоящем документе. Например, на ФИГ. 152 представлен вид в поперечном сечении одного варианта осуществления концевого эффектора и узла стержня, показанных на ФИГ. 83-91, показывающий другой пример установки узла 1100 поворотного электрода, включающего внешний контакт 1102 и внутренний контакт 1103, как описано в настоящем документе.
На ФИГ. 153-168 представлены различные варианты осуществления электрохирургического концевого эффектора 700, содержащего проксимальную зону обработки ткани 706 и дистальную зону обработки ткани 708. В проксимальной зоне обработки ткани 706 для обработки ткани используются различные электроды и режущие края, например, как описано выше в настоящем документе применительно к концевому эффектору 3000, показанному на ФИГ. 6-10. Обработка, производимая в проксимальной зоне обработки ткани 706, может включать, например, зажатие, захват, рассечение, коагуляцию, спайку и т.п. Дистальная зона обработки ткани 708 также может содержать один или более электродов 742, и ее можно использовать для обработки ткани, а в некоторых вариантах осуществления - для выполнения других хирургических задач, таких как захват и манипулирование шовными иглами и/или другими хирургическими инструментами.
На ФИГ. 153 представлен один вариант осуществления концевого эффектора 700. Концевой эффектор 700 можно использовать с различными хирургическими инструментами, включая описанные в настоящем документе. Как показано на фигуре, концевой эффектор 700 содержит первый элемент бранши 720 и второй элемент бранши 710. Первый элемент бранши 720 может быть выполнен с возможностью перемещения относительно второго элемента бранши 1004 между открытыми положениями (показаны на ФИГ. 153-156) и закрытыми положениями (показаны на ФИГ. 166 и 165). Например, элементы бранши 720, 710 могут поворотно прикрепляться к точке поворота 702. Элементы бранши 710, 720 могут быть изогнуты относительно продольной оси инструмента LT, как показано на фигуре. В некоторых вариантах осуществления элементы бранши 710, 720 могут быть прямыми, как показано применительно к элементам бранши 3008A, 3008B, представленным на ФИГ. 6-8. В процессе применения концевой эффектор 700 можно переводить из открытого положения в закрытое положение для захвата ткани между элементами бранши 720, 710. Ткань, захваченная между элементами бранши 720, 710, может зажиматься и зацепляться вдоль частей элементов бранши 710, 720 с целью применения одного или более видов обработки, таких как рассечение, спайка, иссечение и прижигание электрическим током.
Проксимальная зона обработки ткани 706 концевого эффектора 700 может осуществлять обработку способом, аналогичным описанному выше применительно к концевому эффектору 3000. Ткань между элементами бранши 720, 710 в проксимальной зоне обработки можно зафиксировать на месте, например, при помощи зубцов 734a, 734b. См., например, ФИГ. 154-159. В проксимальной зоне обработки ткани 706 каждый из элементов бранши 720, 710 может образовывать соответствующие продольные каналы 812, 810. Двутавровый элемент 820 (ФИГ. 155 и 159) может перемещаться дистально и проксимально внутри продольных каналов 812, 810, например, как описано выше в настоящем документе применительно к концевому эффектору 3000 и выполненному с возможностью перемещения по оси элементу 3016. В некоторых вариантах осуществления дистальное и проксимальное поступательное перемещение двутаврового элемента 820 также может обеспечивать поступательное перемещение элементов бранши 720, 710 между открытым и закрытым положениями. Например, двутавровый элемент 820 может содержать фланцы, расположенные так, чтобы они контактировали с криволинейными поверхностями соответствующих элементов бранши 720, 710 аналогично тому, как фланцы 3016A, 3016B контактируют с криволинейными поверхностями 3026A, 3026B в варианте осуществления, описанном применительно к ФИГ. 6-10. Двутавровый элемент 820 также может образовывать дистально направленный режущий элемент 822, который может рассекать ткань между элементами бранши 720, 710 при дистальном продвижении двутаврового элемента 820. В некоторых вариантах осуществления элементы бранши 720, 710 могут содержать контактирующие с тканью поверхности 730a, 730b, 732a, 732b, аналогичные контактирующим с тканью поверхностям 504A, 504B, 506A, 506B, описанным выше в настоящем документе применительно к ФИГ. 132-137.
Проксимальная зона обработки ткани 706 может дополнительно содержать различные электроды и/или токовые контуры для подачи электрохирургической (РЧ) энергии и/или другой энергии к ткани. Второй элемент бранши 710 может содержать подающий электрод 848, расположенный вокруг канала 810. См., например, ФИГ. 153-155 и 157. Подающий электрод 848 может находиться в электрической связи с генератором, подающим РЧ-энергию, например, генератором 3002, описанным выше в настоящем документе. Например, подающий электрод 848 может быть соединен с одним или более подающими соединительными проводами 846. Подающие соединительные провода 846 могут проходить дистально через узел стержня к стыковочному элементу инструмента 302 и/или к рукоятке 2500 и в конечном счете к генератору, такому как генератор 3002 или внутренний генератор, как описано в настоящем документе. Подающий электрод 848 может быть электрически изолирован от других элементов концевого эффектора 700. Например, как показано на ФИГ. 10, подающий электрод (обозначенный на любой стороне канала 810 номерами 848a и 848b) может располагаться на изолирующем слое 844 (также обозначенном на любой стороне канала 810 номерами 844a, 844b). Изолирующий слой 844 может быть образован из любого подходящего изолирующего материала, такого как керамика, тефлон и т.п. В некоторых вариантах осуществления изолирующий слой 844 можно нанести в виде покрытия на элемент бранши 810. Подающий электрод 848 может работать в сочетании с возвратным контуром, подавая РЧ-энергию к ткани, например, ткани 762, показанной на ФИГ. 159. Ток, подаваемый подающим электродом 848, может проходить через ткань 762 и возвращаться к генератору по возвратному контуру. Возвратный контур может содержать различные электрически проводящие элементы концевого эффектора 700. Например, в некоторых вариантах осуществления возвратный контур может содержать корпуса первого и второго элементов бранши 720, 710, двутавровый элемент 820, контактирующие с тканью поверхности 730a, 730b, 732a, 732b и т.п.
В показанных вариантах осуществления подающий электрод 848 выведен из возвратного контура. Например, подающий электрод 848 расположен таким образом, что, когда элементы бранши 720, 710 находятся в закрытом положении, показанном на ФИГ. 159, электрод 848 не находится в электрическом контакте (например, физическом контакте) с проводящими частями концевого эффектора 700, которые могут функционировать как возвратный контур для РЧ-тока. Например, первый элемент бранши 720 может содержать противоположный элемент 878 (обозначенный на ФИГ. 159 номерами 878a и 878b на любой стороне канала 812), расположенный напротив электрода 848 таким образом, что при закрытии элементов бранши 720, 710 электрод 848 входит в непосредственный контакт только с противоположным элементом 878 и ни с какими другими частями концевого эффектора 700. Противоположный элемент 878 может быть электроизолирующим. Таким образом, существует возможность закрытия элементов бранши 720, 710 без короткого замыкания подающего электрода 848 на возвратный контур. В некоторых вариантах осуществления противоположный элемент 878 может быть избирательно изолирующим. Например, противоположный элемент 878 может иметь корпус с положительным температурным коэффициентом (ПТК), как описано выше, который является проводящим при температуре ниже пороговой (например, приблизительно 100°C) и изолирующим при более высоких температурах. Таким образом противоположный элемент 878 может образовывать часть возвратного контура, но только до тех пор, пока его температура не превысит пороговую температуру. Например, если произойдет короткое замыкание подающего электрода 848 на противоположный элемент 878, содержащий материал с ПТК или аналогичный материал, температура противоположного элемента 878 быстро поднимется выше порогового значения, в результате чего короткое замыкание будет разорвано.
Дистальная зона обработки ткани 708 может образовывать дистальные захватывающие поверхности 790a, 790b, расположенные на элементах бранши 710, 720 соответственно. Дистальные захватывающие поверхности 790a, 790b могут располагаться дистально относительно проксимальной зоны обработки 706. Дистальные захватывающие поверхности 790a, 790b в некоторых вариантах осуществления могут быть выполнены с возможностью захватывать и удерживать ткань. Например, дистальные захватывающие поверхности 790a, 790b могут содержать захватывающие элементы 741 для увеличения трения между захватывающими поверхностями 790a, 790b и тканью и/или хирургическими инструментами, как описано ниже в настоящем документе. Захватывающие элементы 741 могут иметь любую подходящую текстуру, образованную поверхностями 790a, 790b, увеличивающее трение покрытие, нанесенное на поверхности 790a, 790b и т.п.
В некоторых вариантах осуществления дистальная зона обработки ткани 708 также может быть выполнена с возможностью подачи монополярной и/или биполярной электрохирургической (например, РЧ) энергии. Например, поверхность 790a может представлять собой и/или содержать дистальный подающий электрод 742. Например, поверхность 790a сама по себе может быть образована из проводящего материала и, следовательно, может представлять собой дистальный подающий электрод 742. В некоторых вариантах осуществления, как описано в настоящем документе, проводящий электрод 742 может содержать проводящий материал, соединенный с изолирующим слоем 845. Изолирующий слой 845 может представлять собой слой диэлектрика и/или покрытие, нанесенное на элемент бранши 710. Дистальный подающий электрод 742 может находиться в электрическом контакте с генератором, таким как генератор 3002, описанный выше в настоящем документе, и/или с внутренним генератором. В некоторых вариантах осуществления дистальный подающий электрод 742 может находиться в электрическом контакте с подающим электродом 848 проксимальной зоны обработки ткани 706. Таким образом, дистальный подающий электрод 742 может получать питание при подаче энергии на проксимальный подающий электрод 848. В некоторых вариантах осуществления дистальный подающий электрод 742 может получать питание независимо от проксимального подающего электрода 848. Например, дистальный подающий электрод 742 может быть соединен с генератором посредством особой питающей линии (не показана).
Возвратный контур для электрической энергии, подаваемой дистальным подающим электродом 742, также может содержать любую подходящую проводящую часть концевого эффектора, включая, например, элемент бранши 710, элемент бранши 720, двутавровый элемент 820 и т.п. В некоторых вариантах осуществления дистальная захватывающая поверхность 790b также может образовывать дистальный возвратный электрод 748, который может представлять собой часть возвратного контура от дистального подающего электрода 742. Например, дистальный возвратный электрод 748 может находиться в электрическом контакте с элементом бранши 720, которая в свою очередь может находиться в электрическом контакте с генератором, таком как генератор 3000. Дистальный возвратный электрод 748 может быть образован любым подходящим способом. Например, поверхность 790b может быть проводящей, тем самым формируя электрод 748. В некоторых вариантах осуществления проводящий материал можно нанести на поверхность 790b, где проводящий материал образует электрод 748.
В показанных вариантах осуществления дистальный подающий электрод 742 выполнен без смещения. Например, дистальный подающий электрод 742 выровнен с возвратным электродом 748. Соответственно, концевой эффектор 700 может быть выполнен таким образом, чтобы дистальный подающий электрод 742 не входил в контакт с возвратным электродом 748, когда элементы бранши 720, 710 находятся в закрытом положении. Например, когда элементы бранши 720, 710 находятся в закрытом положении, между дистальным подающим электродом 742 и дистальным возвратным электродом 748 может присутствовать зазор 780. Данный зазор 780 показан на ФИГ. 160, 161, 162, 163, 164 и 165.
В различных вариантах осуществления зазор 780 может образовываться вследствие размеров (например, толщины) различных компонентов проксимальной зоны обработки ткани 706. Например, когда противоположный элемент 878 и проксимальный подающий электрод 848 могут проходить к оси LT так, что при физическом контакте электрода 848 и элемента 878 (например, при закрытом положении элементов бранши 720, 710) дистальные захватывающие поверхности 790a,b не находятся в физическом контакте друг с другом. Для достижения данного результата можно использовать любую подходящую комбинацию противоположного элемента 878, подающего электрода 848 и изолирующего слоя 844.
Как показано на ФИГ. 160, 163 и 164, изолирующий слой 844 и изолирующий слой 845 могут быть непрерывными (например, образовывать непрерывный изолирующий слой). Аналогично проксимальный подающий электрод 848 и дистальный подающий электрод 742 могут быть непрерывными (образовывать непрерывный электрод). На фигуре также показан противоположный элемент 878. Как показано на фигуре, электрод 848 (например, часть непрерывного электрода в проксимальной зоне 706) имеет большую толщину, чем электрод 742. Соответственно, при контакте электрода 848 с противоположным элементом 878 толщина электрода 848 может позволять дистальным захватывающим поверхностям 790a,b контактировать друг с другом, в результате чего формируется зазор 780. На ФИГ. 161 представлен альтернативный вариант осуществления концевого эффектора 700, где электрод 742 и электрод 848 имеют одинаковую толщину. Однако толщину противоположного элемента 878 выбирают таким образом, чтобы при контакте электрода 848 с противоположным элементом 878 дистальные захватывающие поверхности 790a,b не контактировали друг с другом, в результате чего формируется зазор 780. На ФИГ. 162 представлен другой вариант осуществления, где изолирующий слой 844 имеет большую толщину, чем изолирующий слой 845, в результате чего предотвращается контакт между дистальными захватывающими поверхностями 790a, b, а также формируется зазор 780.
В некоторых вариантах осуществления дистальный подающий электрод 742 может проходить дистально до части дистального края 886 элемента бранши 710. Например, на ФИГ. 153 представлена дистальная часть электрода 744. Врач может использовать дистальную часть электрода 744 для подачи электрохирургической энергии к ткани, которая не обязательно находится между элементами бранши 720, 710. В некоторых вариантах осуществления дистальную часть электрода 744 можно использовать для осуществления биполярного и/или монополярного прижигания. В биполярных вариантах осуществления в дистальной части электрода 744 можно использовать возвратный контур, аналогичный возвратным контурам, описанным в настоящем документе. В некоторых вариантах осуществления соответствующие элементы бранши могут содержать внешние углубления и/или выступы 800, 802, аналогичные выступам, описанным в настоящем документе применительно к ФИГ. 116-131. Углубления и/или выступы 800, 802 могут быть проводными и могут образовывать возможные возвратные контуры для тока, проходящего через дистальную часть электрода 744. В некоторых вариантах осуществления, в которых присутствует дистальная часть электрода 744, изолирующий слой 845 может проходить дистально под дистальной частью электрода, как показано на ФИГ. 164.
Следует понимать, что длина соответствующих зон обработки ткани 706, 708 в разных вариантах реализации может варьироваться. Например, на ФИГ. 165 представлен вариант осуществления, в котором дистальная зона обработки ткани 708 относительно короче зоны 708, показанной на других фигурах. Например, как показано на ФИГ. 165, дистальная зона обработки ткани 708 проходит проксимально на меньшее расстояние от дистального кончика концевого эффектора 700, чем зоны 708, показанные на других фигурах.
В некоторых вариантах осуществления дистальную зону обработки ткани 708 можно использовать в качестве обычного хирургического зажима. Например, дистальные захватывающие поверхности 790a,b можно использовать для захвата и манипулирования тканью. Также в некоторых вариантах осуществления дистальные захватывающие поверхности 790a,b можно использовать для захвата и манипулирования искусственными хирургическими инструментами, такими как иглы, зажимы, скобы и т.п. Например, на ФИГ. 160, 161, 162 и 163 показан хирургический инструмент 896, зафиксированный между дистальными захватывающими поверхностями 790a,b. На ФИГ. 160, 161 и 162 хирургический инструмент 896 имеет круглое поперечное сечение (например, шовная игла). На ФИГ. 163 хирургический инструмент 896 имеет некруглое поперечное сечение (например, задний конец шовной иглы, зажим и т.п.). При использовании в качестве зажима дистальная зона обработки 708 может подавать или не подавать электрохирургическую энергию на объекты между обращенными к ткани поверхностями 790a,b. Например, может быть нежелательно подавать электрохирургическую энергию на иглу или иной хирургический инструмент.
Следует понимать, что, как описано выше, некоторые компоненты проксимальной зоны обработки ткани 706 могут быть общими и/или могут едиными с некоторыми компонентами дистальной зоны обработки ткани 708. Например, на ФИГ. 167 представлен один вариант осуществления элемента бранши 710 с удаленными электродами 878, 742 для иллюстрации изолирующих слоев 845, 844. Как показано на фигуре, изолирующие слои 845, 844 образуют общий непрерывный слой 899. Дистальная часть непрерывного слоя 899 может образовывать изолирующий слой 845, тогда как проксимальная часть изолирующего слоя 899 может образовывать изолирующий слой 844. Как показано на фигуре, изолирующий слой 844 образует прорезь 897, соответствующую каналу 810, так чтобы двутавровый элемент 820 мог проходить по каналу 810 без вхождения в контакт с непрерывным слоем 899. Также как показано на фигуре, изолирующий слой 845 имеет дистальную часть 843, проходящую над частью дистального конца 886 элемента бранши 710. Например, дистальная часть 843 может располагаться под дистальной частью электрода 744.
На ФИГ. 166 представлен вариант осуществления элемента бранши 710, как показано на ФИГ. 167, с установленными электродами 742, 848. Как показано на фигуре, проксимальный подающий электрод может содержать области 850a, 850b, 850c. Области 850a и 850b расположены на любой стороне канала 810. Область 850c расположена дистально относительно самой дистальной части канала 810. На ФИГ. 168 представлен альтернативный вариант осуществления, в котором отсутствует третья область 850c. Соответственно, первая и вторая области 850a, 850b электрода 848 проходят дистально до дистального подающего электрода 742.
Не имеющие ограничительного характера примеры
В различных вариантах осуществления хирургический инструмент может содержать концевой эффектор и узел стержня, проксимальный к концевому эффектору. Концевой эффектор содержит первый элемент бранши, второй элемент бранши и закрывающий механизм, выполненный с возможностью перемещения первого элемента бранши относительно второго элемента бранши между открытым положением и закрытым положением. Узел стержня содержит шарнирное сочленение, выполненное с возможностью независимого шарнирного поворота концевого эффектора в вертикальном направлении и в горизонтальном направлении. Хирургический инструмент также содержит по меньшей мере один активный электрод, расположенный по меньшей мере на одном из первого элемента бранши и второго элемента бранши. По меньшей мере один активный электрод выполнен с возможностью подачи РЧ-энергии к ткани, размещенной между первым элементом бранши и вторым элементом бранши в закрытом положении.
В различных вариантах осуществления хирургический инструмент может содержать концевой эффектор и узел стержня, проксимальный к концевому эффектору. Концевой эффектор содержит первый элемент бранши, второй элемент бранши и закрывающий механизм, выполненный с возможностью перемещения первого элемента бранши относительно второго элемента бранши между открытым положением и закрытым положением. Узел стержня содержит поворотное соединение головки, выполненное с возможностью независимого поворота концевого эффектора. Хирургический инструмент также содержит по меньшей мере один активный электрод, расположенный по меньшей мере на одном из первого элемента бранши и второго элемента бранши. По меньшей мере один активный электрод выполнен с возможностью подачи РЧ-энергии к ткани, размещенной между первым элементом бранши и вторым элементом бранши в закрытом положении.
Хирургический инструмент может содержать концевой эффектор, содержащий первый элемент бранши, второй элемент бранши и закрывающий механизм, выполненный с возможностью перемещения первого элемента бранши относительно второго элемента бранши между открытым положением и закрытым положением. Хирургический инструмент дополнительно содержит узел стержня, проксимальный к хирургическому концевому эффектору, причем хирургический концевой эффектор выполнен с возможностью поворота относительно узла стержня, и причем поворотный приводной стержень выполнен с возможностью передавать поворотные движения. Поворотный приводной стержень способен избирательно перемещаться по оси между первым положением и вторым положением относительно узла стержня, причем поворотный приводной стержень выполнен с возможностью сообщения поворотных движений закрывающему механизму в первом осевом положении и причем поворотный приводной стержень выполнен с возможностью сообщения поворотных движений концевому эффектору во втором осевом положении. Кроме того, закрывающий механизм хирургического инструмента содержит двутавровый элемент, выполненный с возможностью поступательного перемещения в осевом направлении для поднятия кулачком первого элемента бранши ко второму элементу бранши. Двутавровый элемент соединяется с резьбовым поворотным приводным элементом, соединенным с поворотной приводной гайкой, причем поворотный приводной стержень выполнен с возможностью зацепления с поворотной приводной гайкой для передачи поворотных движений на поворотную приводную гайку. Поворотные движения поворотной приводной гайки инициируют поступательное перемещение резьбового поворотного приводного элемента и двутаврового элемента в осевом направлении. Более того, первый элемент бранши и второй элемент бранши содержат каналы, выполненные с возможностью скользящего зацепления с двутавровым элементом, причем поворотные движения поворотной приводной гайки инициируют поступательное перемещение двутаврового элемента в каналах между проксимально оттянутым положением и дистально продвинутым положением.
Хирургический инструмент может содержать концевой эффектор, содержащий первый элемент бранши, второй элемент бранши и первый исполнительный механизм, выполненный с возможностью перемещения первого элемента бранши относительно второго элемента бранши между открытым положением и закрытым положением. Хирургический инструмент дополнительно содержит узел стержня, проксимальный к хирургическому концевому эффектору, и поворотный приводной стержень, выполненный с возможностью передавать поворотные движения. Поворотный приводной стержень выполнен с возможностью избирательного перемещения между первым положением и вторым положением относительно узла стержня, причем поворотный приводной стержень выполнен с возможностью зацепления и избирательной передачи поворотных движений на первый исполнительный механизм в первом положении и причем поворотный приводной стержень выполнен с возможностью расцепления с исполнительным механизмом во втором положении. Кроме того, первый исполнительный механизм содержит двутавровый элемент, выполненный с возможностью поступательного перемещения в осевом направлении для поднятия кулачком первого элемента бранши ко второму элементу бранши, причем двутавровый элемент соединен с резьбовым поворотным приводным элементом, который соединен с поворотной приводной гайкой, причем поворотный приводной стержень выполнен с возможностью зацепления с поворотной приводной гайкой для передачи поворотных движений на поворотную приводную гайку и причем поворотные движения поворотной приводной гайки инициируют поступательное перемещение резьбового поворотного приводного элемента и двутаврового элемента в осевом направлении. Более того, первый элемент бранши и второй элемент бранши содержат каналы, выполненные с возможностью скользящего зацепления с двутавровым элементом, и причем поворотные движения поворотной приводной гайки инициируют поступательное перемещение двутаврового элемента в каналах между проксимально оттянутым положением и дистально продвинутым положением.
Хирургический инструмент может содержать концевой эффектор, содержащий первый элемент бранши и второй элемент бранши, причем первый элемент бранши выполнен с возможностью перемещения относительно второго элемента бранши между открытым положением и закрытым положением. Хирургический инструмент также содержит первый и второй исполнительные механизмы и элемент сцепления, выполненный с возможностью избирательного зацепления и передачи поворотного движения на первый или второй исполнительный механизм. Кроме того, первый исполнительный механизм содержит двутавровый элемент, выполненный с возможностью поступательного перемещения в осевом направлении для поднятия кулачком первого элемента бранши ко второму элементу бранши, причем двутавровый элемент соединен с резьбовым поворотным приводным элементом, который соединен с поворотной приводной гайкой, причем элемент сцепления выполнен с возможностью зацепления с поворотной приводной гайкой для передачи поворотных движений на поворотную приводную гайку и причем поворотные движения поворотной приводной гайки инициируют поступательное перемещение резьбового поворотного приводного элемента и двутаврового элемента в осевом направлении. Более того, первый элемент бранши и второй элемент бранши содержат каналы, выполненные с возможностью скользящего зацепления с двутавровым элементом, и причем поворотные движения поворотной приводной гайки инициируют поступательное перемещение двутаврового элемента в каналах между проксимально оттянутым положением и дистально продвинутым положением.
Хирургический инструмент может содержать взаимозаменяемый концевой эффектор, узел рукоятки и узел стержня. Взаимозаменяемый концевой эффектор включает первый элемент бранши, содержащий первый электрод, а также второй элемент бранши, содержащий второй электрод. Первый элемент бранши выполнен с возможностью перемещения относительно второго элемента бранши между первым положением и вторым положением. Узел рукоятки проксимален к указанному хирургическому концевому эффектору. Узел стержня проходит между узлом рукоятки и взаимозаменяемым концевым эффектором. Узел стержня содержит поворотный приводной стержень, выполненный с возможностью передачи поворотных движений. Поворотный приводной стержень выполнен с возможностью избирательного перемещения по оси относительно узла стержня между множеством отдельных положений. Соединительная конфигурация может разъемно прикреплять взаимозаменяемый концевой эффектор к узлу стержня.
Хирургический инструмент может содержать взаимозаменяемый концевой эффектор, узел рукоятки и узел стержня. Взаимозаменяемый концевой эффектор может содержать первый элемент бранши, включающий первый электрод, второй элемент бранши, включающий второй электрод, закрывающий механизм, выполненный с возможностью перемещения первого элемента бранши относительно второго элемента бранши между первым положением и вторым положением, и активирующий шкив, выполненный с возможностью управлять закрывающим механизмом. Узел стержня проксимален к взаимозаменяемому концевому эффектору и содержит поворотный приводной стержень, выполненный с возможностью передавать поворотные движения активирующему шкиву. Соединительная конфигурация может разъемно прикреплять взаимозаменяемый концевой эффектор к узлу стержня.
Хирургический инструмент может содержать взаимозаменяемый концевой эффектор, узел рукоятки и узел стержня. Концевой эффектор содержит первый элемент бранши, включающий первый электрод, второй элемент бранши, включающий второй электрод, закрывающий механизм, выполненный с возможностью перемещения первого элемента бранши относительно второго элемента бранши между первым положением и вторым положением, и активирующий шкив, выполненный с возможностью управлять закрывающим механизмом. Узел стержня проксимален к взаимозаменяемому концевому эффектору и содержит поворотный приводной стержень, выполненный с возможностью передавать поворотные движения. Взаимозаменяемый концевой эффектор разъемно прикрепляется к узлу стержня. Поворотный приводной стержень выполнен с возможностью избирательного продвижения по оси для функционального зацепления и передачи поворотных движений на активирующий шкив.
Хирургический концевой эффектор может содержать первый элемент бранши и второй элемент бранши. На дистальной части первого элемента бранши находится внешняя поверхность. На дистальной части второго элемента бранши находится внешняя поверхность. Первый элемент бранши выполнен с возможностью перемещения относительно второго элемента бранши между первым положением и вторым положением. По меньшей мере одна из внешних поверхностей первого и второго элементов бранши содержит захватывающую ткань часть.
Хирургический инструмент может содержать хирургический концевой эффектор, узел рукоятки и приводной стержень. Хирургический концевой эффектор содержит первый элемент бранши с внешней поверхностью на ее дистальном конце и второй элемент бранши с внешней поверхностью на ее дистальном конце. Первый элемент бранши выполнен с возможностью перемещения относительно второго элемента бранши между первым положением и вторым положением. По меньшей мере одна из внешних поверхностей первого и второго элементов бранши содержит захватывающую ткань часть. Узел рукоятки проксимален к указанному хирургическому концевому эффектору. Приводной стержень проходит между указанным хирургическим концевым эффектором и указанным узлом рукоятки и выполнен с возможностью перемещения первой бранши относительно второй бранши между первым положением и вторым положением в ответ на пусковые движения в рукоятке.
Хирургический инструмент может содержать исполнительную систему, хирургический концевой эффектор и узел стержня. Исполнительная система предназначена для избирательного генерирования множества управляющих движений. Хирургический концевой эффектор функционально соединен с указанной исполнительной системой и содержит первый элемент бранши и второй элемент бранши. На дистальной части первого элемента бранши находится внешняя поверхность. На дистальной части второго элемента бранши находится внешняя поверхность. Первый элемент бранши поддерживается с возможностью перемещения относительно второго элемента бранши между открытым положением и закрытым положением в ответ на закрывающие движения, генерируемые указанной исполнительной системой. По меньшей мере одна из внешних поверхностей первого и второго элементов бранши содержит адгезивно прикрепленную к ткани часть. Узел стержня предназначен для передачи указанного множества управляющих движений к хирургическому концевому эффектору.
Концевой эффектор может содержать первый элемент бранши и второй элемент бранши. Первый элемент бранши может перемещаться относительно второго элемента бранши между открытым положением и закрытым положением. Первый элемент бранши содержит первую наклоненную под положительным углом контактирующую с тканью поверхность. Второй элемент бранши содержит вторую наклоненную под положительным углом контактирующую с тканью поверхность. По меньшей мере один из первого элемента бранши и второго элемента бранши содержит по меньшей мере один активный электрод, расположенный на элементе бранши смежно с наклоненной под положительным углом контактирующей с тканью поверхностью. По меньшей мере один активный электрод выполнен с возможностью подачи РЧ-энергии к ткани, размещенной между первым элементом бранши и вторым элементом бранши в закрытом положении.
Концевой эффектор может содержать первый элемент бранши и второй элемент бранши. Первый элемент бранши может перемещаться относительно второго элемента бранши между открытым положением и закрытым положением. Первый элемент бранши содержит первую наклоненную под положительным углом контактирующую с тканью поверхность и первую наклоненную под отрицательным углом контактирующую с тканью поверхность. Второй элемент бранши содержит вторую наклоненную под положительным углом контактирующую с тканью поверхность и вторую наклоненную под отрицательным углом контактирующую с тканью поверхность. Первая наклоненная под положительным углом контактирующая с тканью поверхность расположена напротив второй наклоненной под отрицательным углом контактирующей с тканью поверхности, когда первый и второй элементы бранши находятся в закрытом положении. Первая наклоненная под отрицательным углом контактирующая с тканью поверхность расположена напротив второй наклоненной под отрицательным углом контактирующей с тканью поверхности, когда первый и второй элементы бранши находятся в закрытом положении.
Концевой эффектор может содержать первый элемент бранши и второй элемент бранши. Первый элемент бранши может перемещаться относительно второго элемента бранши между открытым положением и закрытым положением. Первый элемент бранши содержит первую проксимальную контактирующую с тканью часть, первую дистальную текстурированную часть, расположенную смежно с первой проксимальной контактирующей с тканью частью, первую наклоненную под положительным углом контактирующую с тканью поверхность, расположенную вдоль первой проксимальной контактирующей с тканью части и по меньшей мере один первый электрод, размещенный в первой проксимальной контактирующей с тканью части смежно с первой наклоненной под положительным углом контактирующей с тканью поверхностью. Второй элемент бранши содержит вторую проксимальную контактирующую с тканью часть, вторую дистальную текстурированную часть, смежную со второй проксимальной контактирующей с тканью частью, вторую наклоненную под положительным углом контактирующую с тканью поверхность, расположенную вдоль второй проксимальной контактирующей с тканью части, и по меньшей мере один второй электрод, размещенный во второй проксимальной контактирующей с тканью части смежно со второй наклоненной под положительным углом контактирующей с тканью поверхностью. По меньшей мере один первый электрод и по меньшей мере один второй электрод находятся в биполярной конфигурации с возможностью подачи РЧ-энергии к ткани, размещенной между первым элементом бранши и вторым элементом бранши в закрытом положении.
Хирургический инструмент может содержать концевой эффектор. Концевой эффектор может содержать первый и второй элементы бранши, узел стержня, поворачиваемый приводной стержень, первый электрический контакт и второй электрический контакт. Первый и второй элементы бранши выполнены с возможностью поворота относительно друг друга из открытого положения в закрытое положение. Электрод расположен на первом элементе бранши. Узел стержня, проходящий проксимально от концевого эффектора, является частично полым и образует внутреннюю стенку. Поворачиваемый приводной стержень проходит проксимально внутри узла стержня. Первый электрический контакт соединен с внутренней стенкой узла стержня и расположен по меньшей мере вокруг части приводного стержня. Второй электрический контакт соединен с приводным стержнем и может поворачиваться вместе с ним. Второй электрический контакт расположен с возможностью электрической связи с первым электрическим контактом при повороте приводного стержня.
Хирургический концевой эффектор для применения с хирургическим инструментом может содержать первый элемент бранши и второй элемент бранши. Второй элемент бранши может поворачиваться относительно первого элемента бранши из первого открытого положения в закрытое положение, причем в закрытом положении первый и второй элементы бранши по существу параллельны. Второй элемент бранши содержит смещенный проксимальный подающий электрод и дистальный подающий электрод. Смещенный проксимальный подающий электрод расположен так, чтобы входить в контакт с противоположным элементом первого элемента бранши, когда первый и второй элементы бранши находятся в закрытом положении. Дистальный подающий электрод расположен дистально относительно смещенного проксимального электрода и выровнен с проводящей поверхностью первого элемента бранши, когда первый и второй элементы бранши находятся в закрытом положении. Когда первый и второй элементы бранши находятся в закрытом положении, проксимальный подающий электрод контактирует с противоположным элементом, а дистальный подающий электрод не контактирует с проводящей поверхностью первого элемента бранши.
Хирургический концевой эффектор для применения с хирургическим инструментом, может содержать первый и второй элементы бранши, выполненные с возможностью поворота из первого открытого положения в закрытое положение. Первый и второй элементы бранши образуют проксимальную зону обработки ткани и дистальную зону обработки ткани. Второй элемент бранши содержит в проксимальной зоне обработки ткани смещенный проксимальный подающий электрод, расположенный таким образом, чтобы, когда элементы бранши находятся в закрытом положении, проксимальный подающий электрод находился в физическом контакте с первым элементом бранши и не находился в электрическом контакте с первым элементом бранши. Второй элемент бранши дополнительный содержит в дистальной зоне обработки ткани дистальный подающий электрод, расположенный таким образом, чтобы, когда элементы бранши находятся в закрытом положении, дистальный подающий электрод был выровнен с проводящей поверхностью первого элемента бранши. Когда элементы бранши находятся в закрытом положении, элементы бранши образуют физический зазор между дистальным подающим электродом и проводящей поверхностью первого элемента бранши.
Устройства, описанные в настоящем документе, могут быть выполнены с возможностью утилизации после однократного применения, или они могут быть выполнены с возможностью применения множество раз. Однако в любом случае после по меньшей мере одного применения устройство можно применять повторно после восстановления. Восстановление может включать любую комбинацию стадий разборки устройства, после которого выполняется очистка или замена конкретных частей с последующей повторной сборкой. В частности, можно разобрать устройство и избирательно заменить или удалить в любой комбинации любой ряд конкретных частей или частей устройства. После очистки и/или замены конкретных частей устройство можно повторно собрать для последующего применения в центрах по восстановлению или хирургической командой непосредственно перед хирургическим вмешательством. Специалистам в данной области будет очевидно, что при восстановлении устройства можно использовать различные методики разборки, очистки/замены и повторной сборки. Применение таких методик, а также полученное в результате подготовленное к повторному применению устройство входят в объем настоящей заявки.
Хотя настоящее изобретение описано в настоящем документе применительно к определенным описанным примерам осуществления, к данным примерам осуществления можно применить различные вариации и модификации. Например, можно использовать различные виды концевых эффекторов. Также для определенных компонентов, для которых описаны материалы, можно использовать другие материалы. Представленное выше описание и следующая формула изобретения охватывают все такие модификации и вариации.
Любой патент, публикация или другой материал описания, который полностью или частично включен в настоящий документ путем ссылки, является неотъемлемой частью данного документа в той степени, в которой он не противоречит существующим определениям, утверждениям или другим материалам описания, представленным в настоящем описании. Таким образом, описание, в прямой форме представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей материалу, включенному в настоящий документ путем ссылки. Любой материал или его часть, которая включена в настоящий документ путем ссылки, но которая противоречит существующим определениям, положениям или информации описания, представленной в настоящем документе, включена в данный документ только в той мере, в которой между существующим материалом описания и настоящим документом не возникает противоречий.
Реферат
Изобретение относится к медицинской технике. Хирургический инструмент содержит концевой эффектор, узел стержня, поворачиваемый приводной стержень, первый электрический контакт и второй электрический контакт. Концевой эффектор содержит первый и второй элементы бранши, которые выполнены с возможностью поворота относительно друг друга из открытого положения в закрытое положение, и электрод, расположенный на первом элементе бранши. Узел стержня проходит проксимально от концевого эффектора, является частично полым и образует внутреннюю стенку. Поворачиваемый приводной стержень проходит проксимально внутри узла стержня. Первый электрический контакт соединен с внутренней стенкой узла стержня и расположен по меньшей мере вокруг части приводного стержня. Второй электрический контакт соединен с приводным стержнем и может поворачиваться вместе с ним. Второй электрический контакт расположен с возможностью электрической связи с первым электрическим контактом при повороте приводного стержня. 11 з.п. ф-лы, 168 ил.
Комментарии