Способ управления парковкой и устройство управления парковкой - RU2736960C1
Код документа: RU2736960C1
Чертежи
Описание
Область техники
[0001] Настоящее изобретение относится к способу управления парковкой и устройству управления парковкой.
Предпосылки изобретения
[0002] Известен метод автономного (автоматизированного) рулевого управления транспортного средства, в котором, когда транспортное средство паркуется на основании команды на въезд, полученной извне транспортного средства, но находящееся в транспортном средстве лицо не может выйти из транспортного средства в месте назначения парковки, транспортное средство перемещается по траектории движения в такое положение, которое является наиболее близким к месту назначения парковки и в котором находящемуся в транспортном средстве лицу обеспечивается пространство для выхода из транспортного средства, и транспортное средство перемещается к месту назначения парковки после того, как находившееся в транспортном средстве лицо вышло из транспортного средства (патентный документ 1).
Документ уровня техники
Патентный документ
[0003]Патентный документ 1: JP5692292B
Сущность изобретения
Проблемы, решаемые изобретением
[0004] Даже когда пространство для выхода из транспортного средства может быть обеспечено, работоспособность дистанционного управления может быть плохой в зависимости от положения выхода из транспортного средства.
[0005] Проблема, решаемая настоящим изобретением, состоит в том, чтобы позволить оператору выйти из транспортного средства в положении, в котором работоспособность дистанционного управления транспортным средством является хорошей.
Средства для решения проблем
[0006] Настоящее изобретение решает вышеуказанную проблему путем остановки транспортного средства во втором положении с относительно высокой работоспособностью дистанционного управления среди одного или более первых положений, в которых оператор транспортного средства может выйти из транспортного средства.
Эффект изобретения
[0007] Согласно настоящему изобретению оператор может выполнять дистанционное управление транспортным средством без движения после выхода из транспортного средства.
Краткое описание чертежей
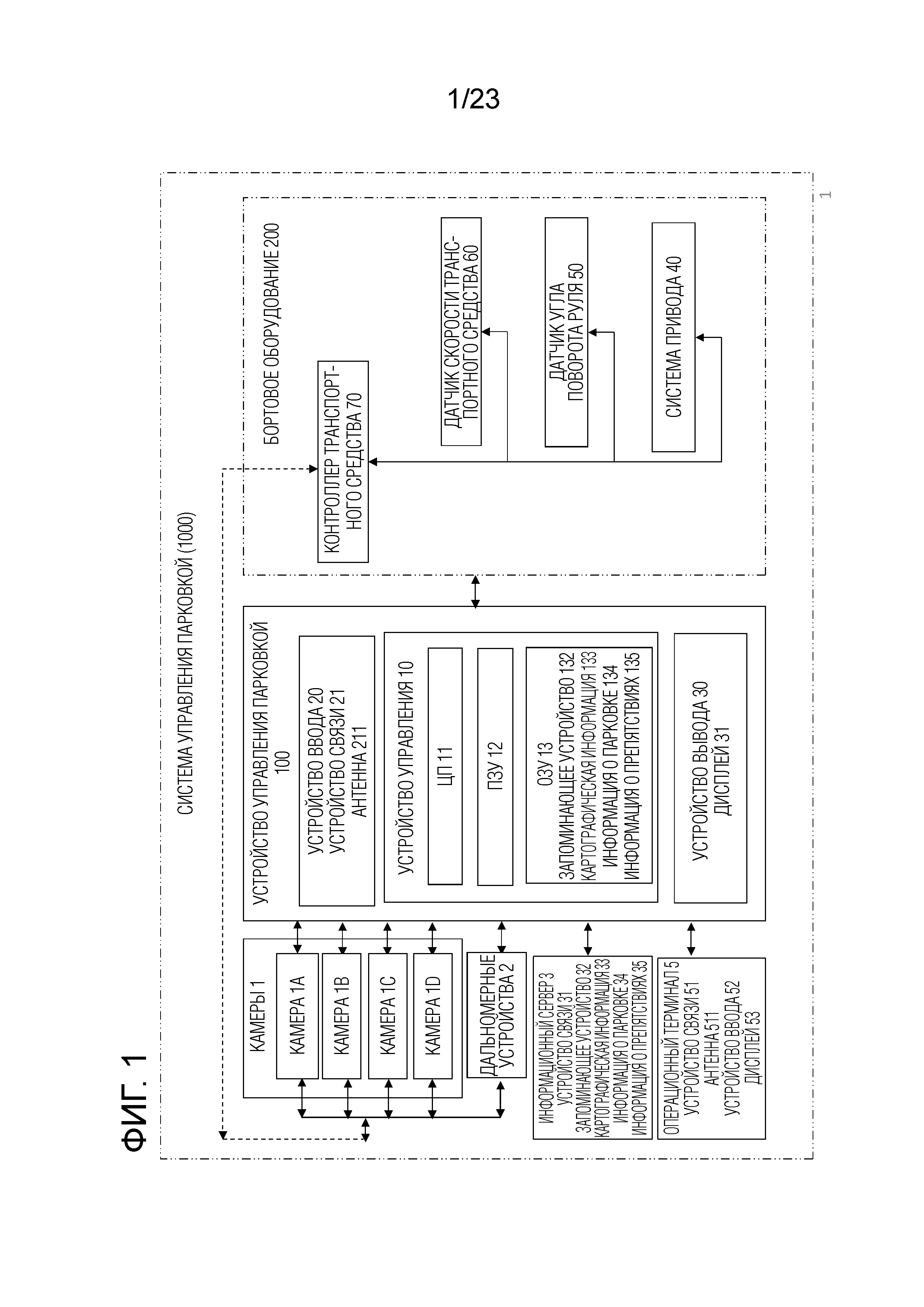
[0008] ФИГ. 1 - блок-схема, иллюстрирующая пример системы управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения.
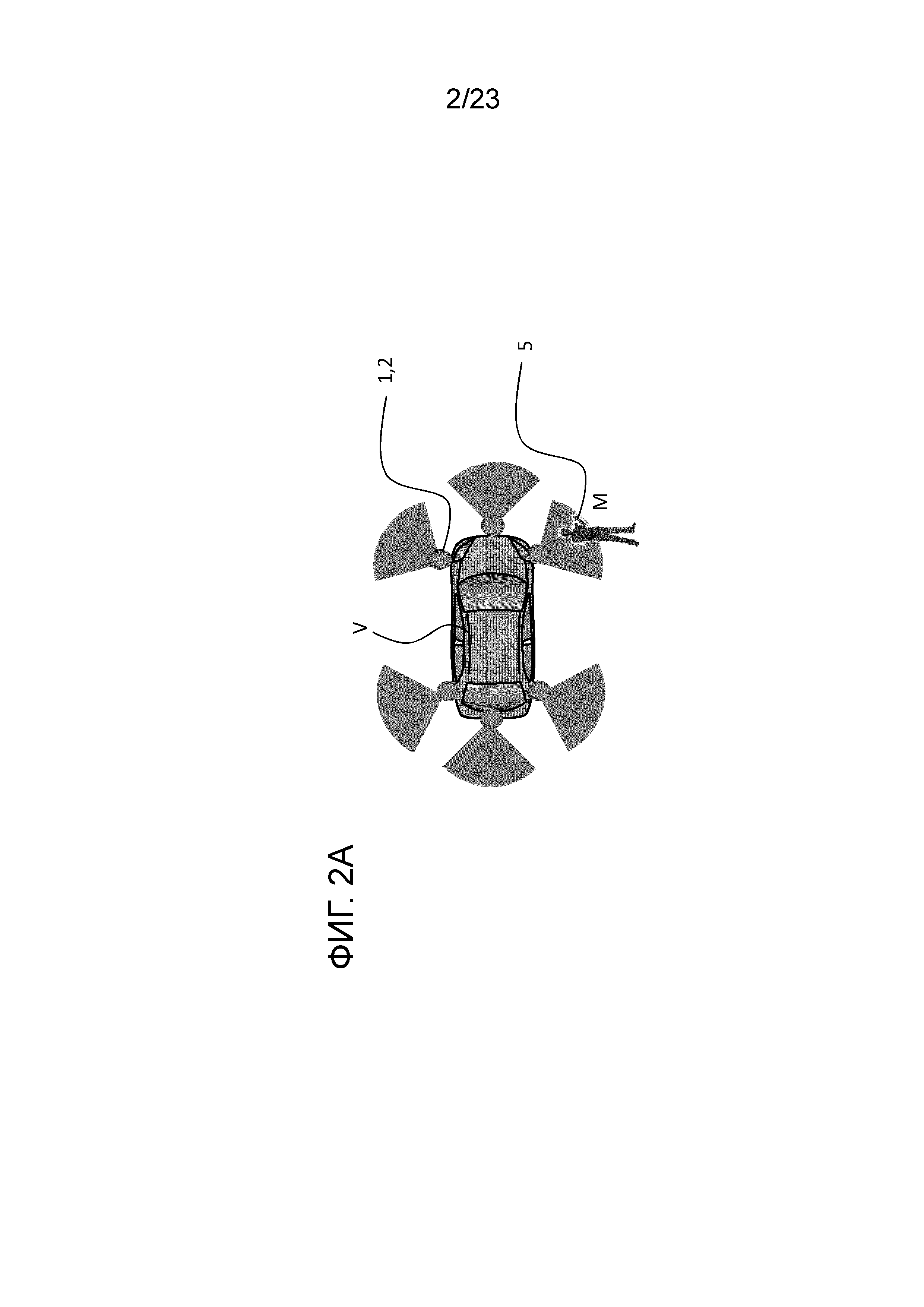
ФИГ. 2А - рисунок для описания первой схемы обнаружения положения оператора.
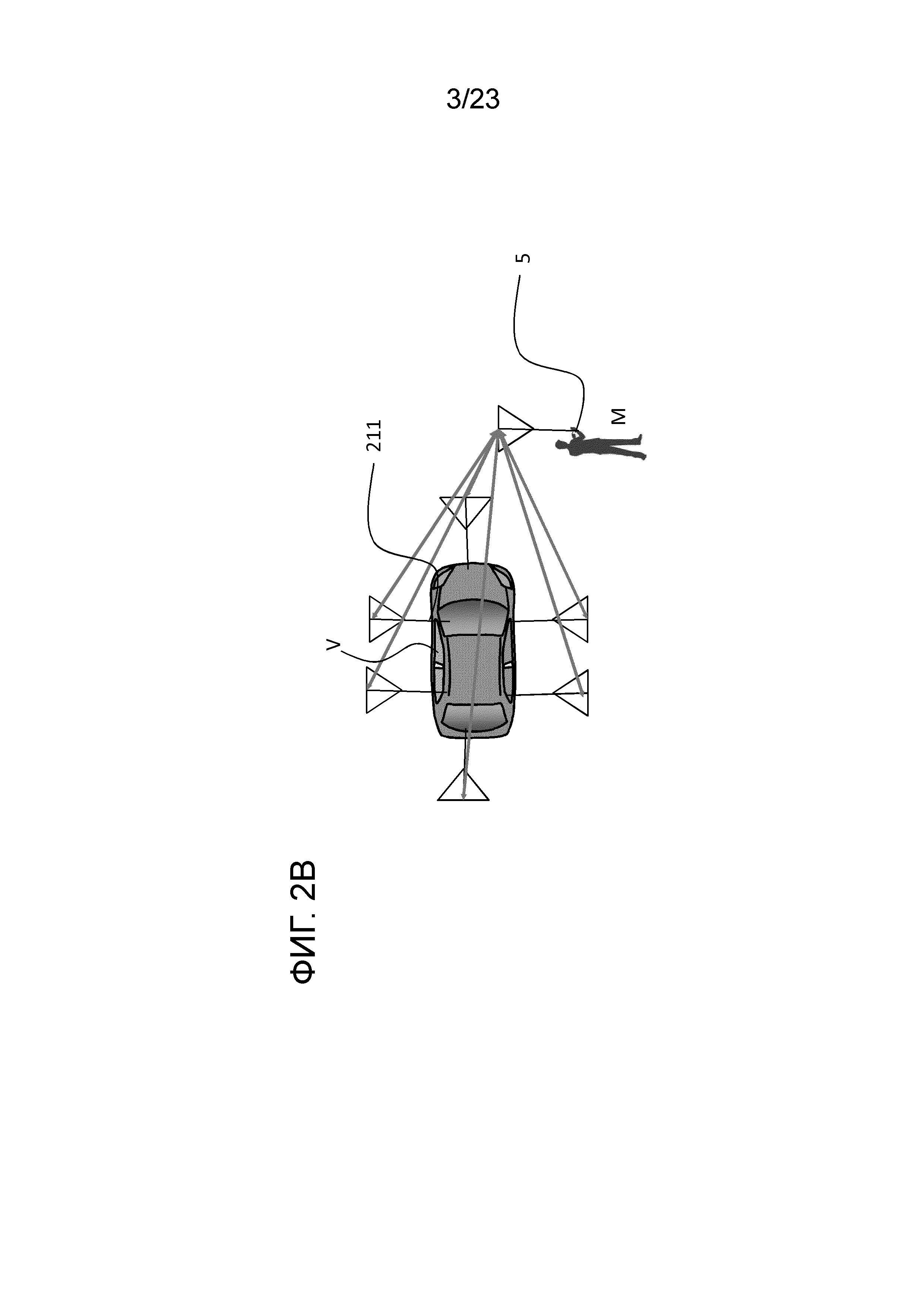
ФИГ. 2B - рисунок для описания второй схемы обнаружения положения оператора.
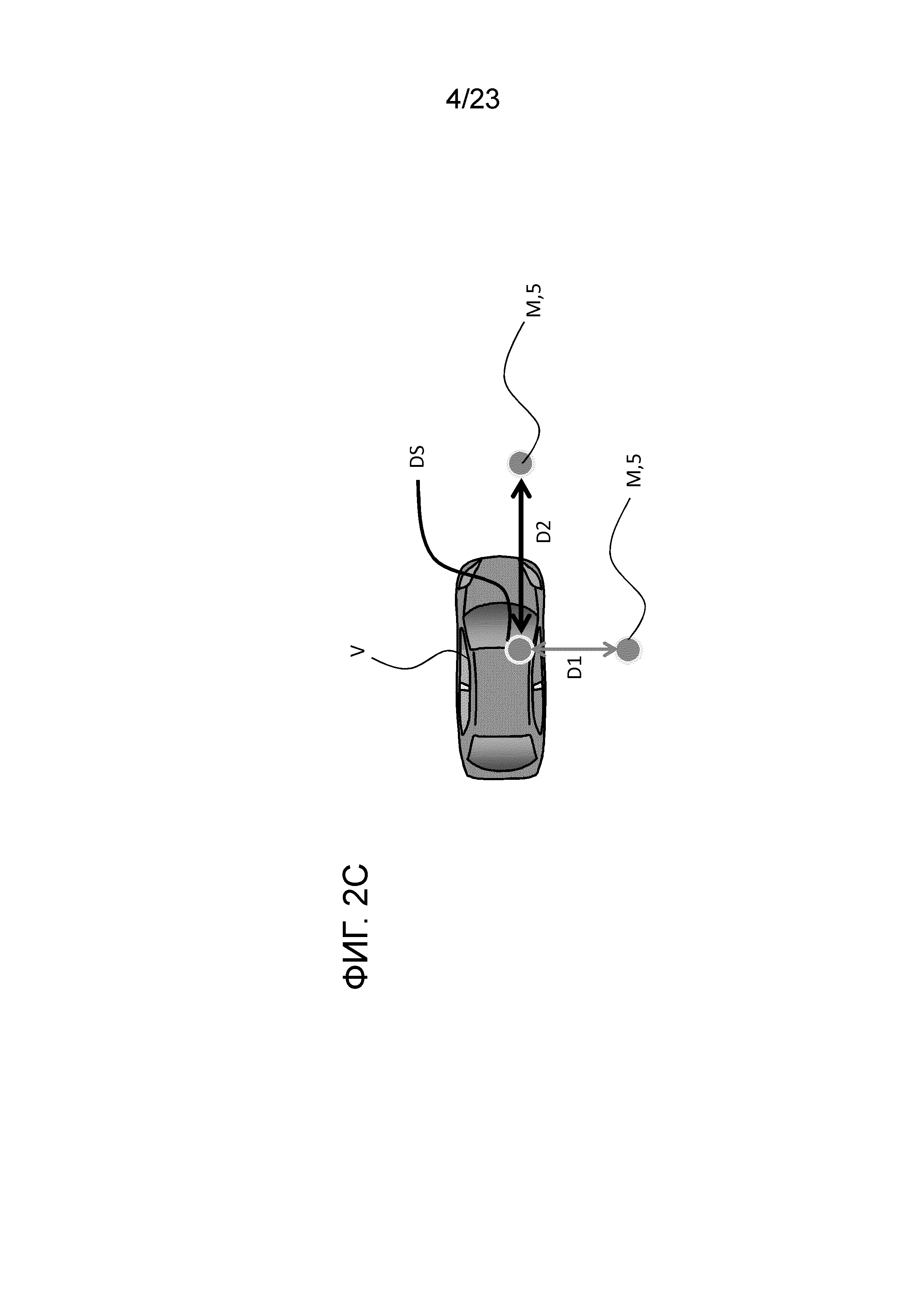
ФИГ. 2C - рисунок для описания третьей схемы обнаружения положения оператора.
ФИГ. 2D - рисунок для описания четвертой схемы обнаружения положения оператора.
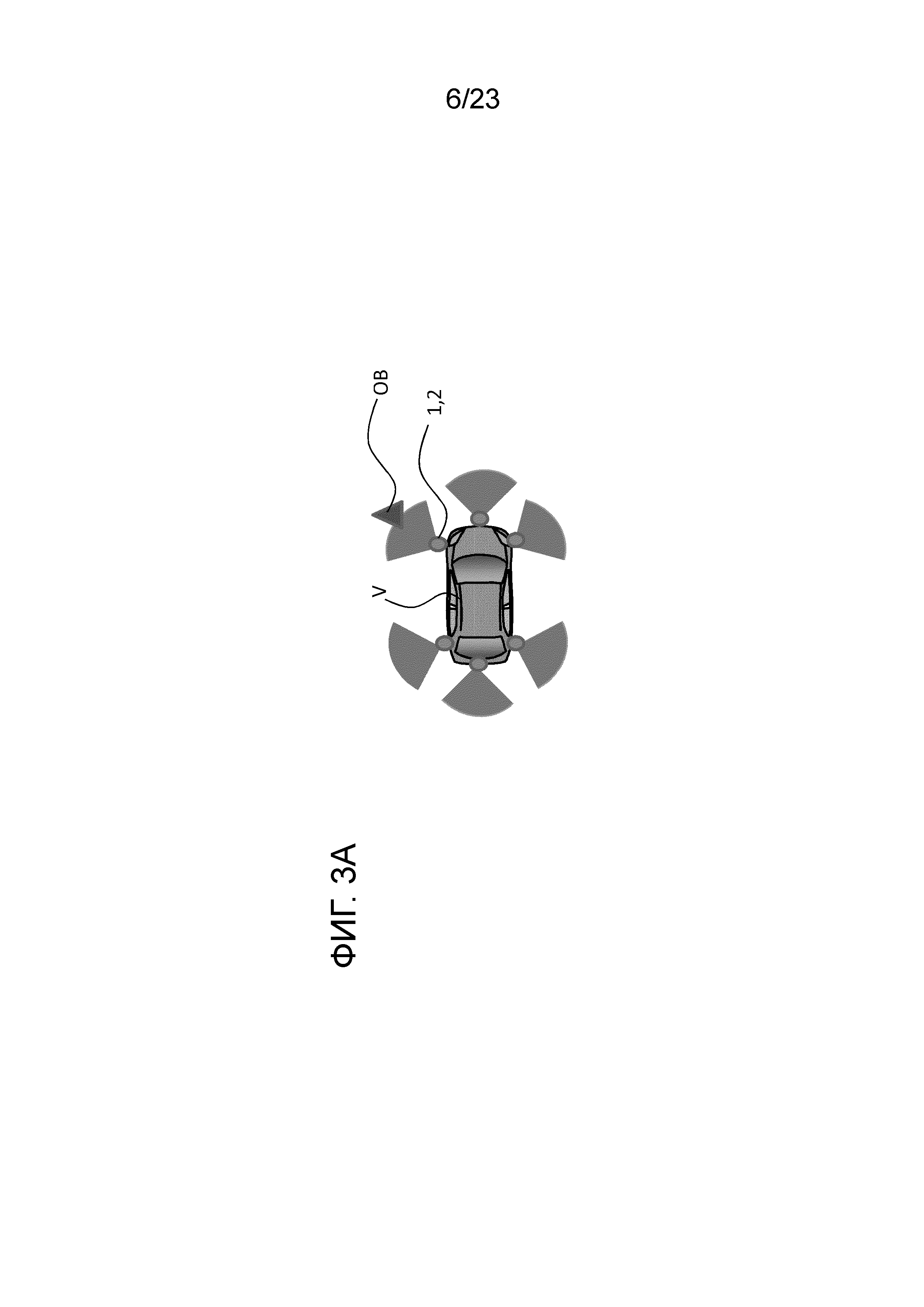
ФИГ. 3А - рисунок для описания первой схемы обнаружения препятствия.
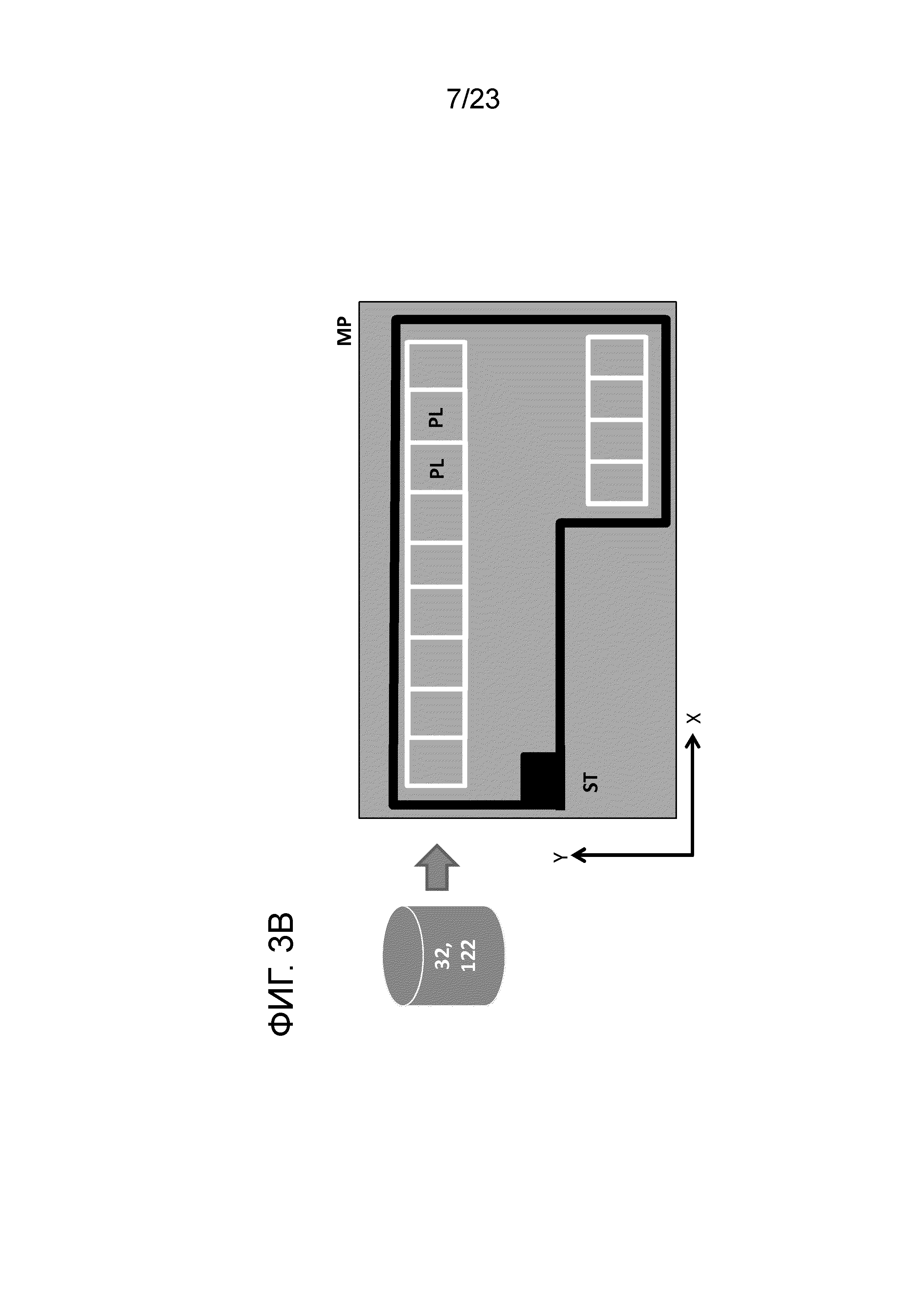
ФИГ. 3B - рисунок для описания второй схемы обнаружения препятствия.
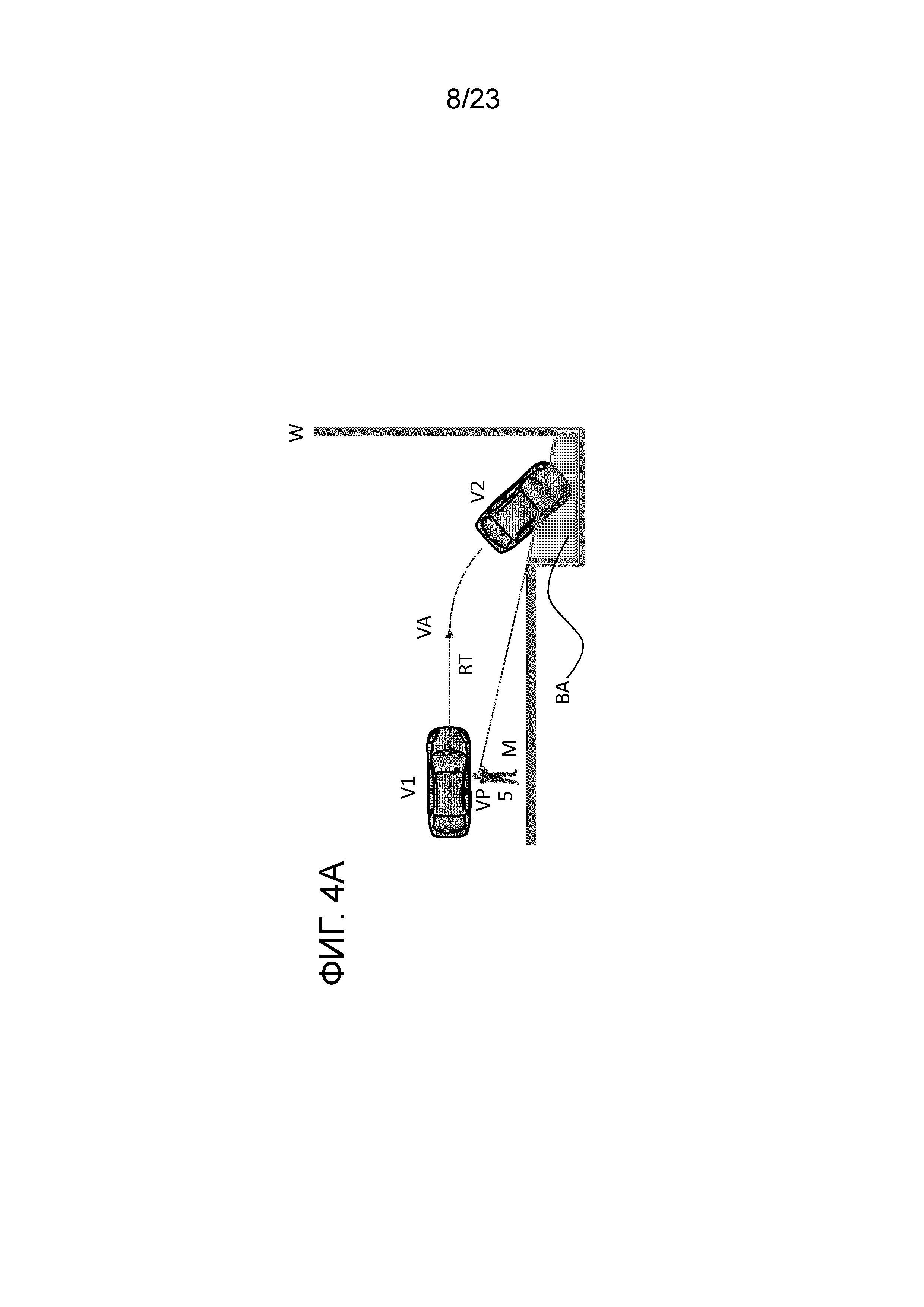
ФИГ. 4A - рисунок для описания первой схемы вычисления первой зоны (слепой зоны) и второй зоны.
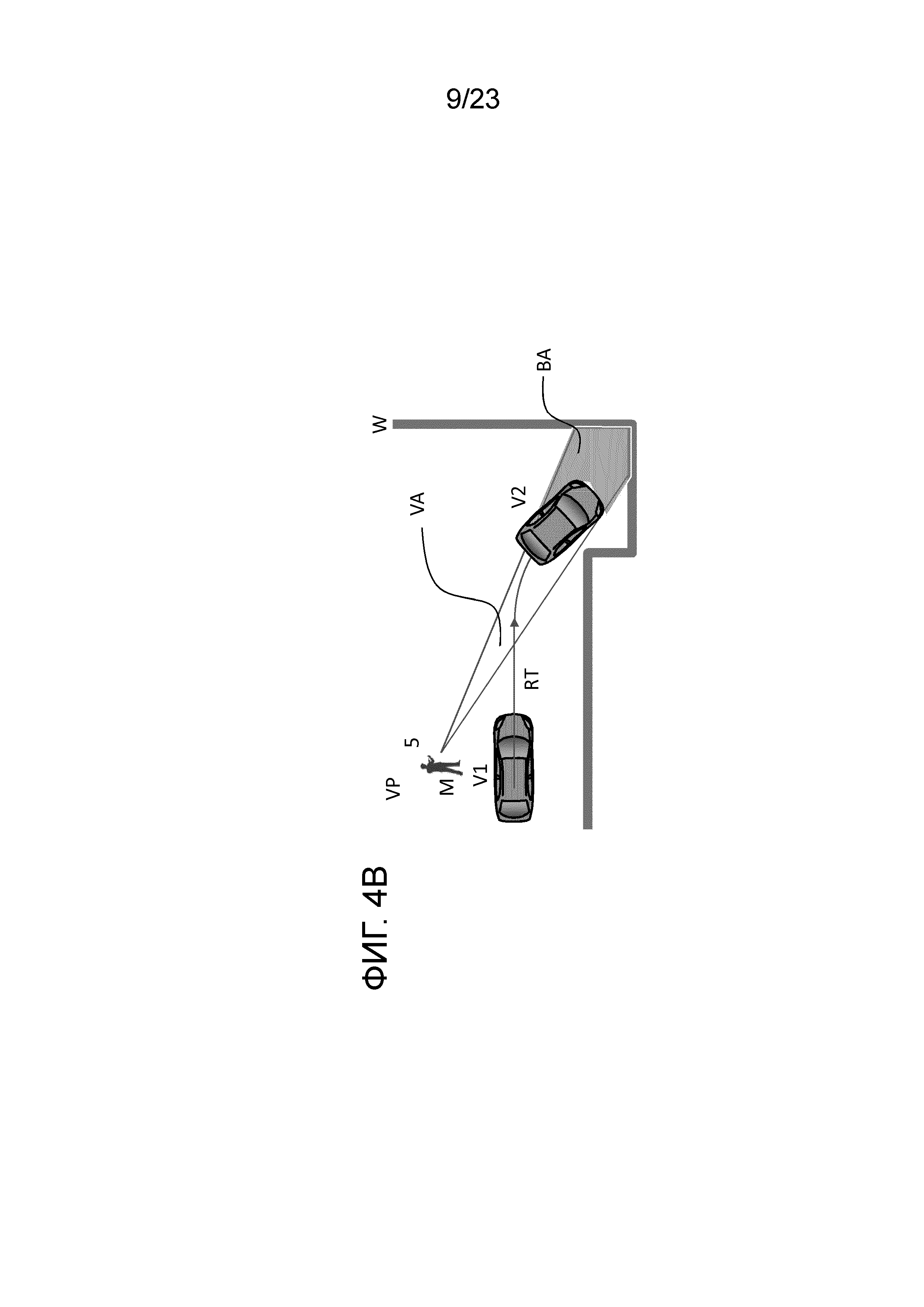
ФИГ. 4B - рисунок для описания второй схемы вычисления первой зоны (слепой зоны) и второй зоны.
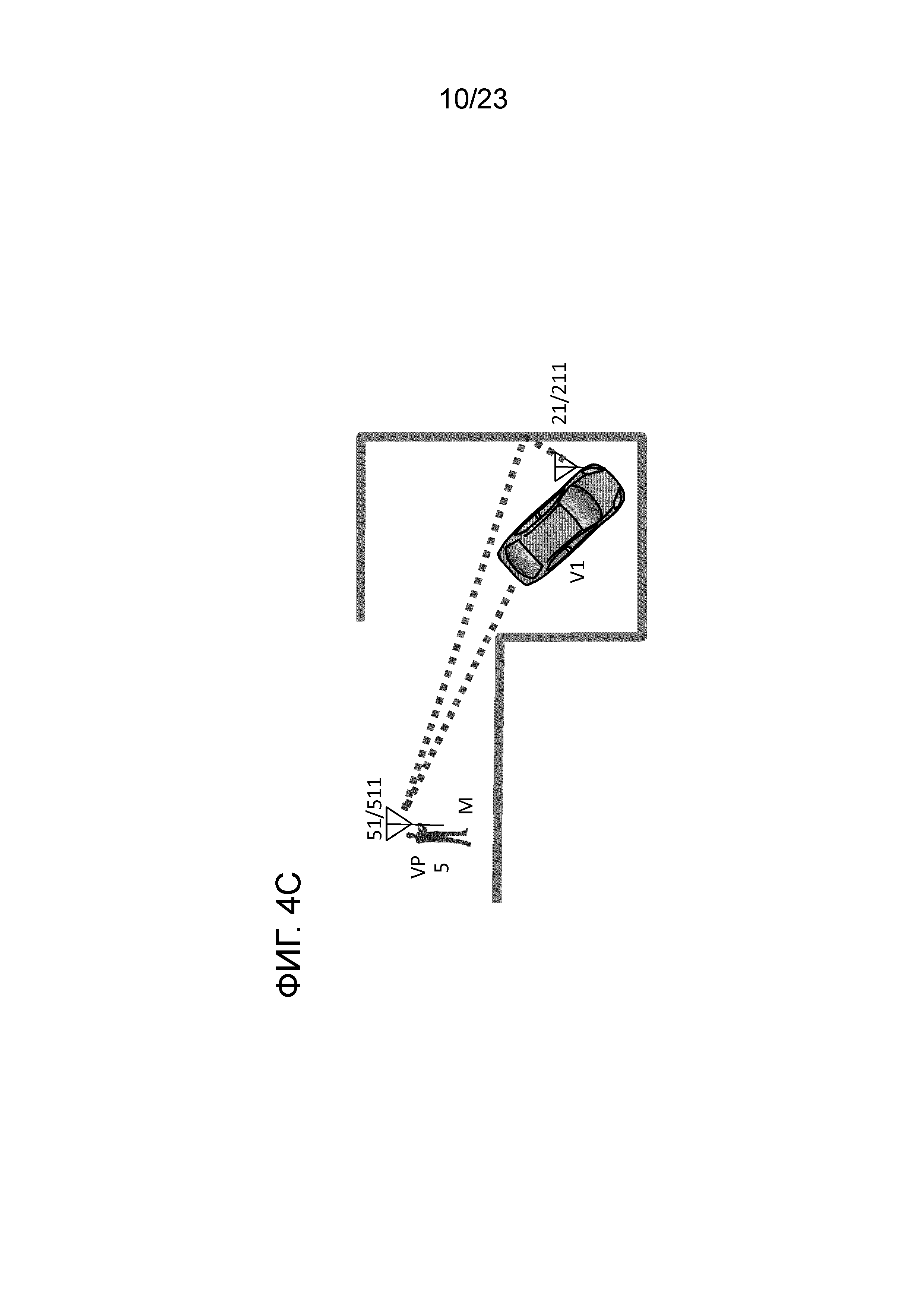
ФИГ. 4C - рисунок для описания третьей схемы вычисления первой зоны (слепой зоны) и второй зоны.
ФИГ. 5 - блок-схема последовательности операций, иллюстрирующая пример процедуры управления, выполняемой системой управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения.
ФИГ. 6 - рисунок для описания схемы поиска для первых положений, в которых возможен выход из системы.
ФИГ. 7 - блок-схема последовательности операций, иллюстрирующая подпрограмму процесса выбора положения высадки.
ФИГ. 8А - первый рисунок для описания первого примера схемы выбора положения высадки.
ФИГ. 8B - второй рисунок для описания первого примера схемы выбора положения, в которой возможна высадка.
ФИГ. 9 - рисунок для описания второго примера схемы выбора положения высадки.
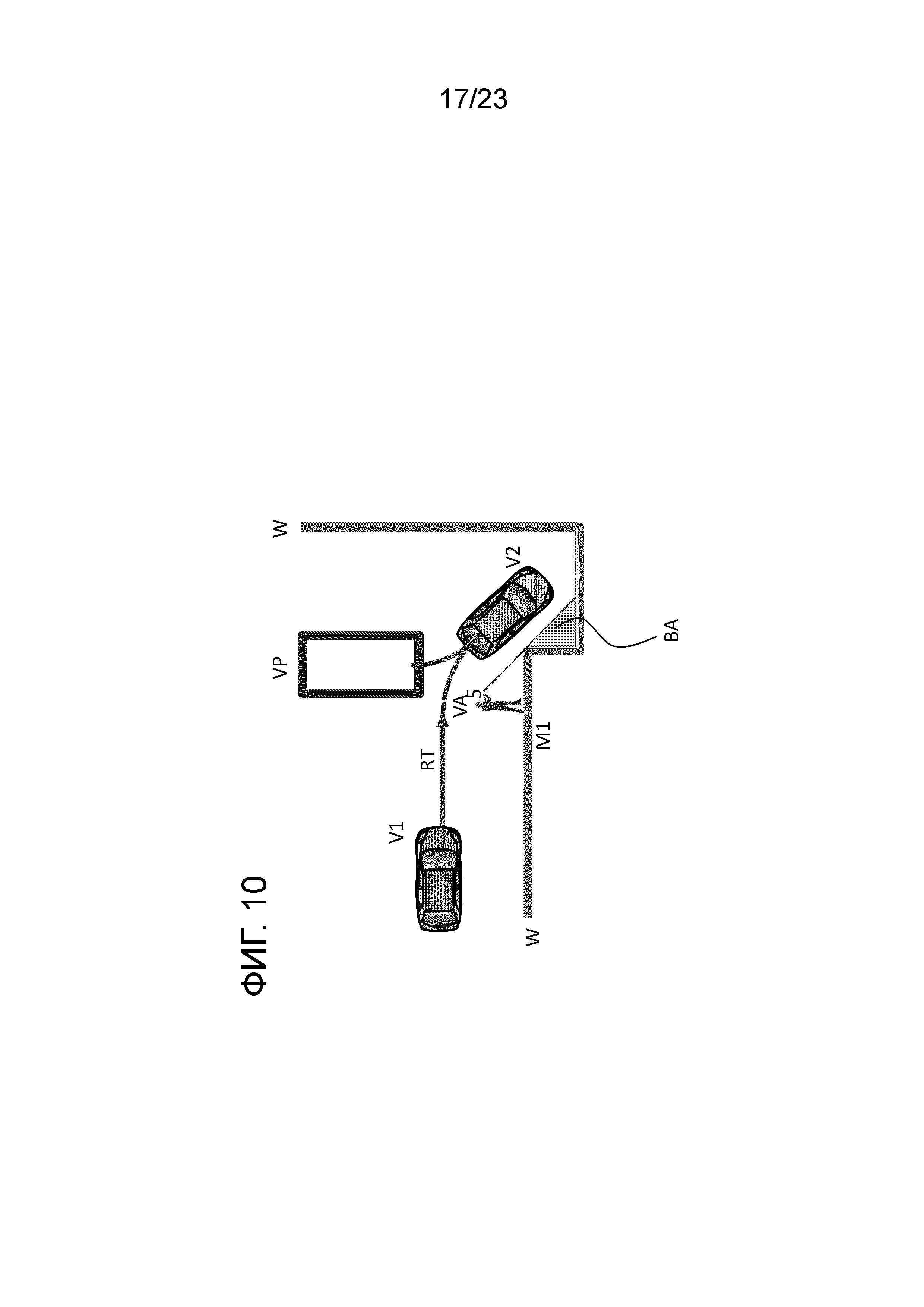
ФИГ. 10 - рисунок для описания третьего примера схемы выбора положения высадки.
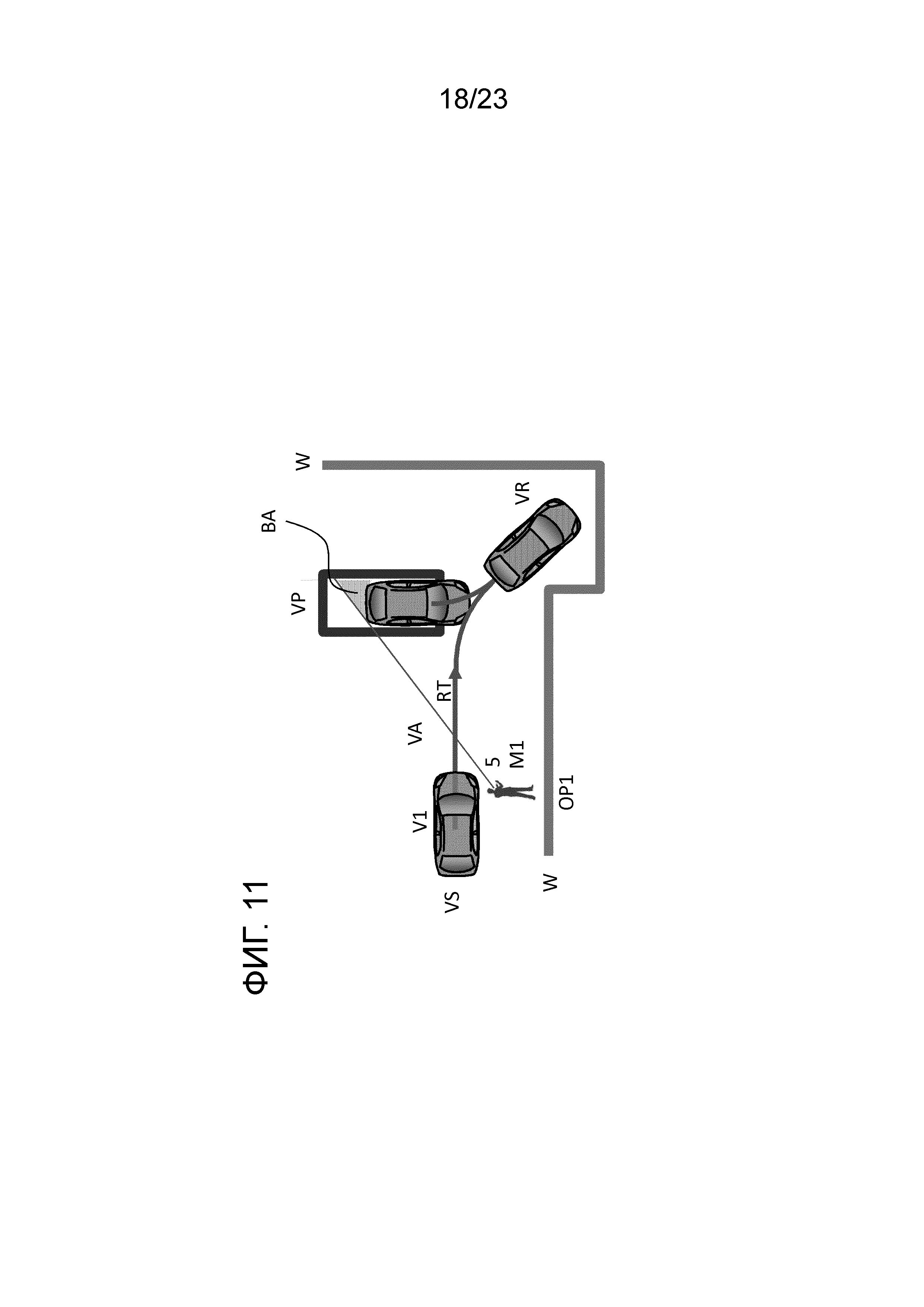
ФИГ. 11 - рисунок для описания четвертого примера схемы выбора положения высадки.
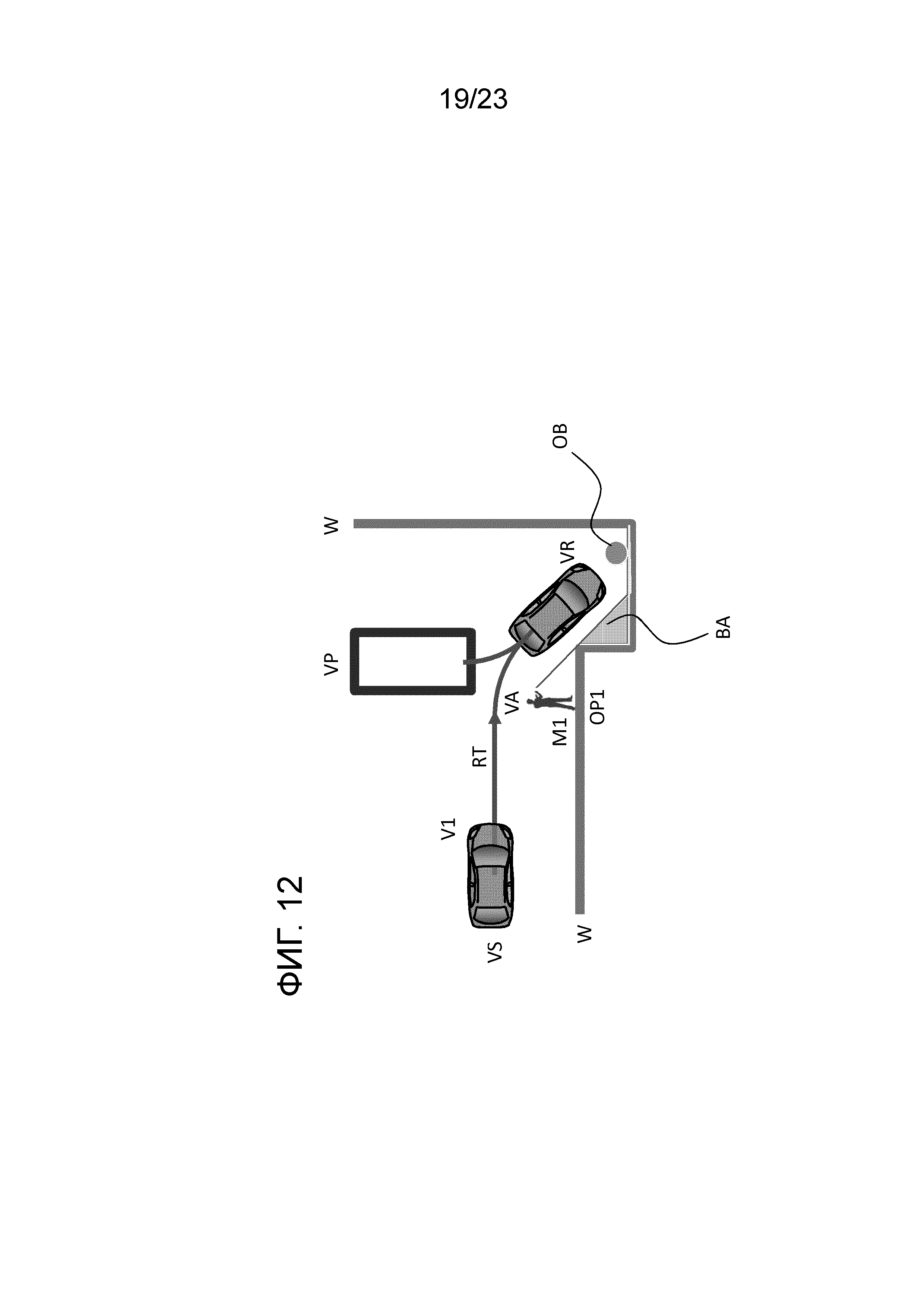
ФИГ. 12 - рисунок для описания пятого примера схемы выбора положения высадки.
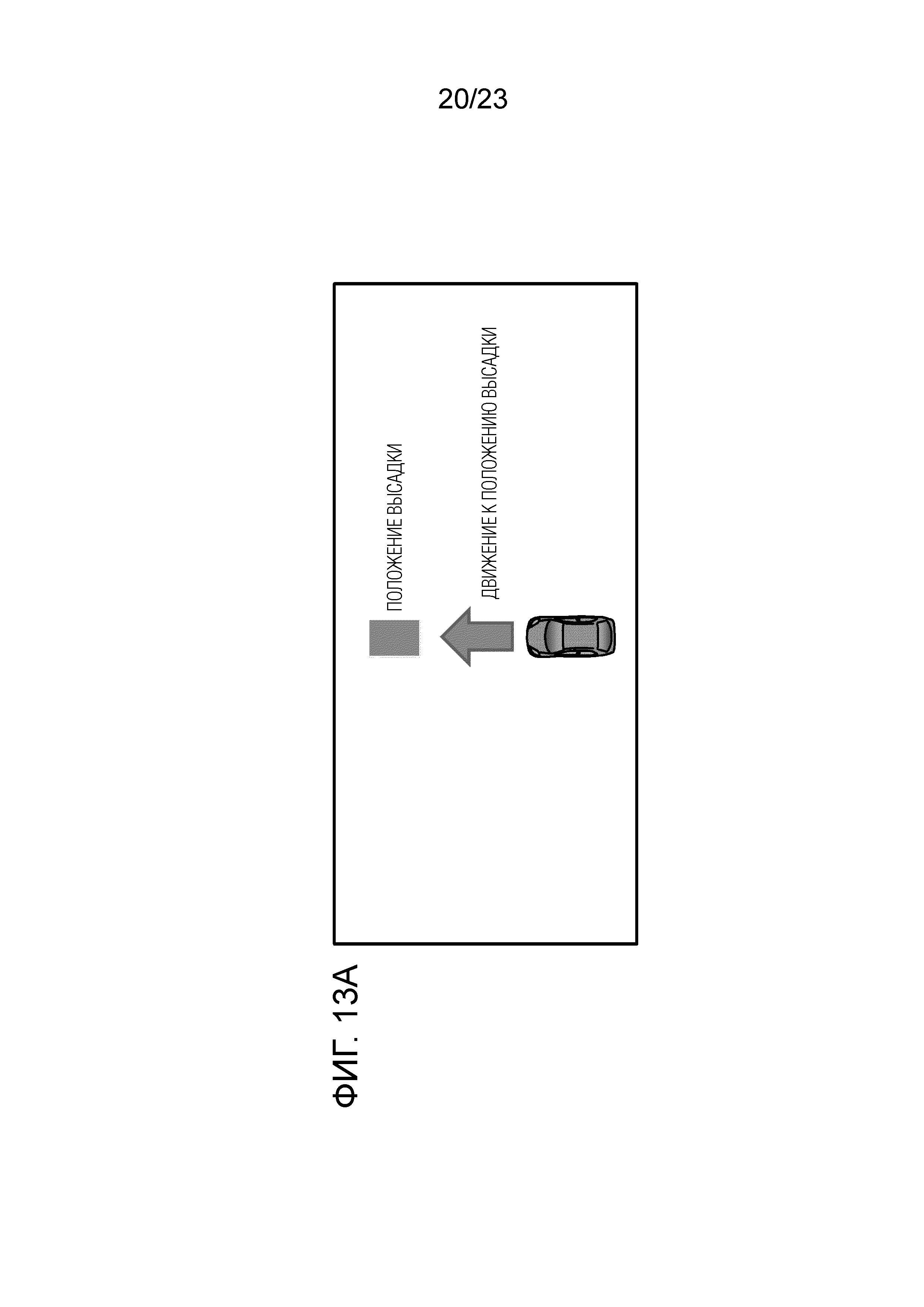
ФИГ. 13А - рисунок, иллюстрирующий пример представления первой руководящей информации о положении высадки.
ФИГ. 13В - рисунок, иллюстрирующий пример представления второй руководящей информации о положении высадки.
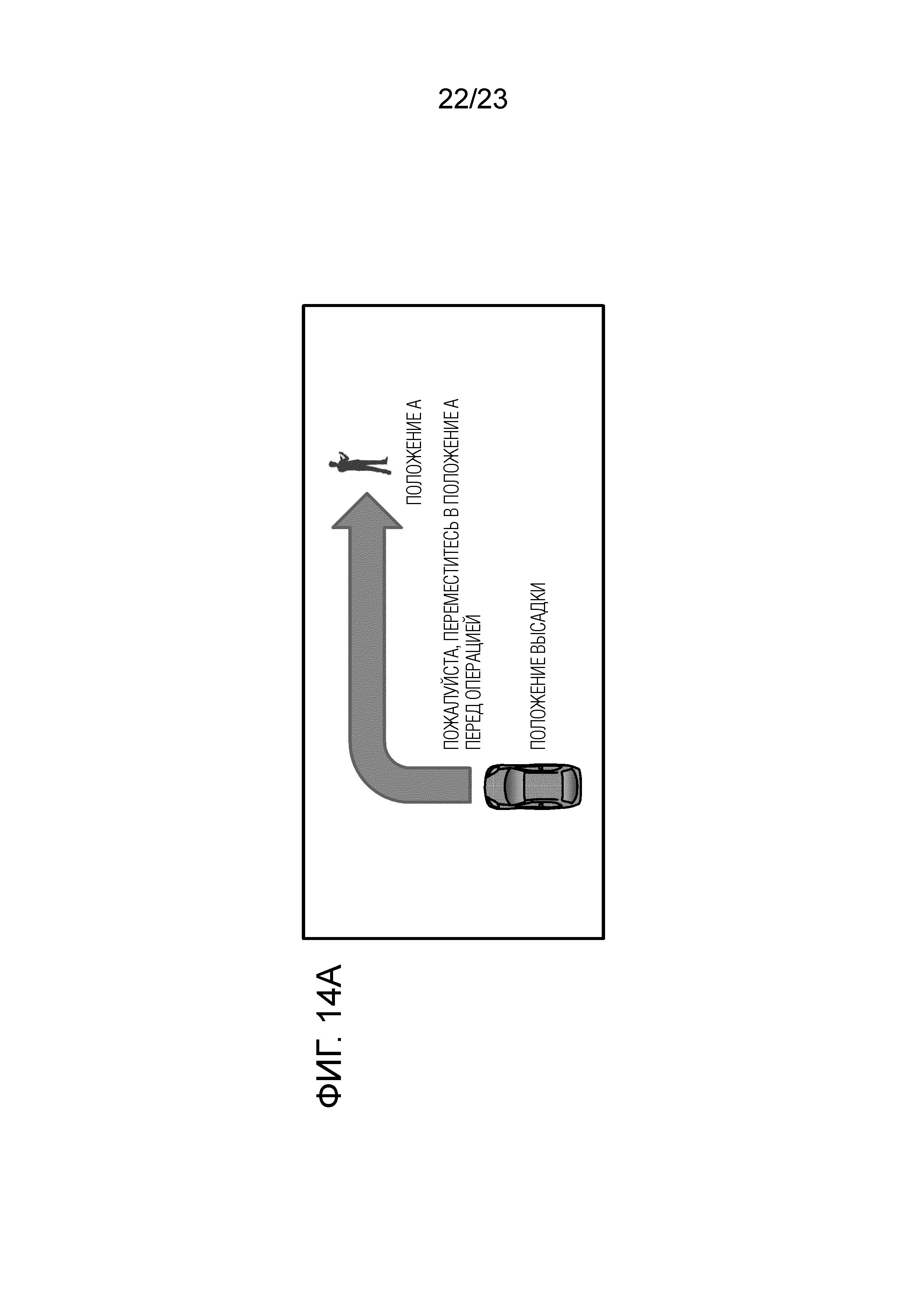
ФИГ. 14А - рисунок, иллюстрирующий пример представления третьей руководящей информации о положении высадки.
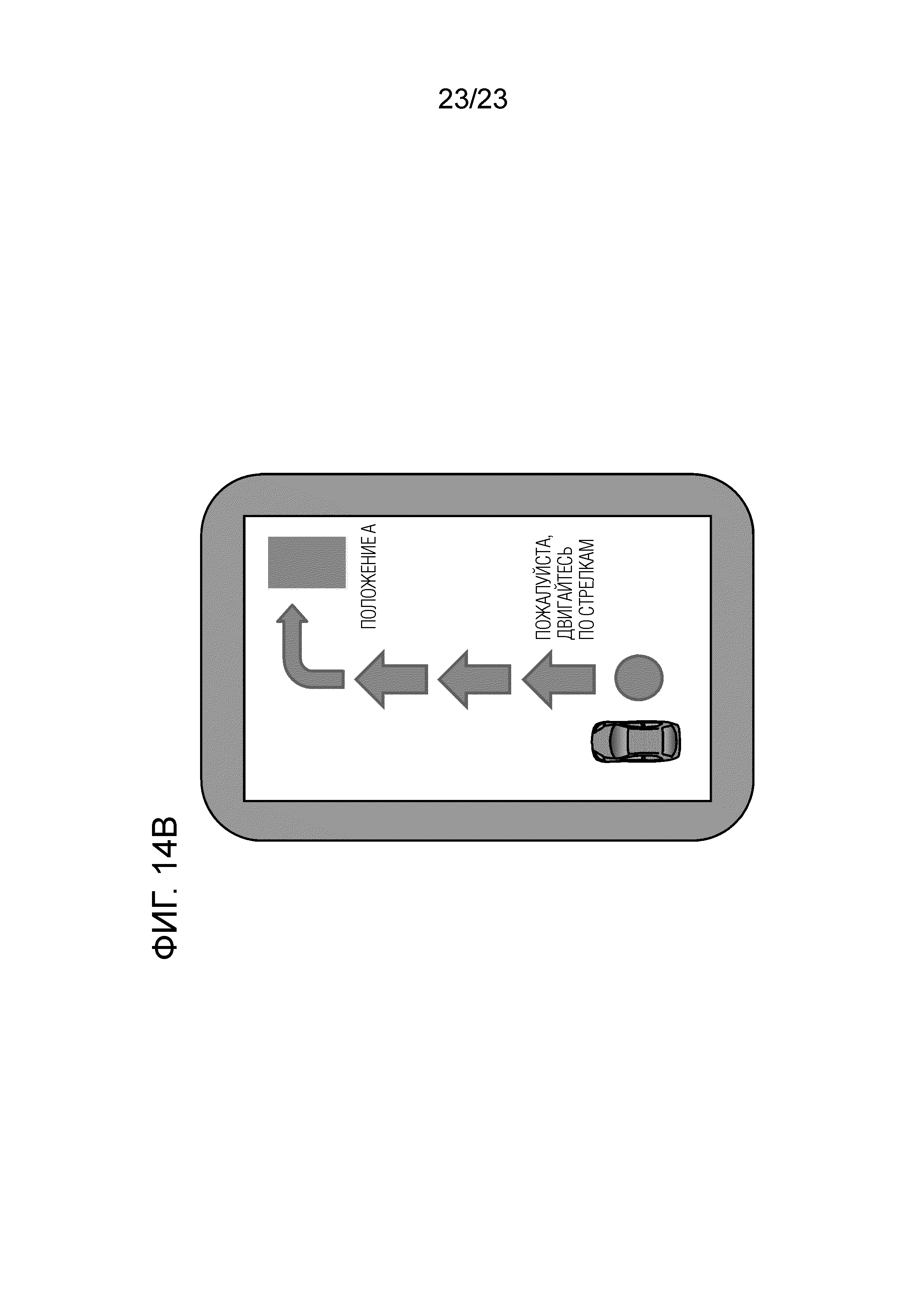
ФИГ. 14В - рисунок, иллюстрирующий пример представления четвертой руководящей информации о положении высадки.
Вариант(ы) осуществления настоящего изобретения
[0009] Далее один или более вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В вариантах осуществления настоящее изобретение будет описано в качестве примера случая, в котором устройство управления парковкой согласно настоящему изобретению применяется в системе управления парковкой. Устройство управления парковкой также может быть применено в портативном операционном терминале (аппарате, таком как смартфон или КПК - карманный персональный компьютер), способном обмениваться информацией с бортовым оборудованием. Способ управления парковкой согласно настоящему изобретению может использоваться в устройстве управления парковкой, которое будет описано ниже.
[0010] На фиг.1 показана блок-схема системы 1000 управления парковкой, включающей в себя устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения. Система 1000 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя камеры 1a-1d, дальномерные устройства 2, информационный сервер 3, операционный терминал 5, устройство 100 управления парковкой, контроллер 70 транспортного средства, систему 40 привода, датчик 50 угла поворота руля и датчик 60 скорости транспортного средства. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения функционирует для управления операцией перемещения (парковки) транспортного средства V в качестве цели (объекта) управления на парковочное место на основе рабочей команды, которая вводится с операционного терминала 5.
[0011] Операционный терминал 5 представляет собой портативный компьютер, который может быть вынесен наружу из транспортного средства V и имеет функцию ввода и функцию связи. Операционный терминал 5 принимает ввод рабочей команды, сделанный оператором M для управления вождением (работой) транспортного средства V для парковки. Вождение включает в себя операции для парковки (операции для въезда на парковочное место и выезда из парковочного места). Оператор M вводит инструкции через операционный терминал 5. Инструкции включают в себя рабочую команду для выполнения парковки. Рабочая команда включает в себя информацию о выполнении/остановке управления парковкой, выборе/изменении целевого положения парковки и выборе/изменении маршрута парковки и другую необходимую для парковки информацию. Оператор M также может заставить устройство 100 управления парковкой распознавать инструкции, включающие в себя рабочую команду, без использования операционного терминала 5, например, жестом оператора M (то есть оператор M может вводить такие инструкции в устройство 100 управления парковкой без использования операционного терминала 5, например, жестом).
[0012] Операционный терминал 5 включает в себя устройство связи и способен обмениваться информацией с устройством 100 управления парковкой и информационным сервером 3. Операционный терминал 5 передает рабочую команду, которая введена вне транспортного средства, в устройство 100 управления парковкой по сети связи и вводит рабочую команду в устройство 100 управления парковкой. Операционный терминал 5 связывается с устройством 100 управления парковкой, используя сигналы, включающие в себя уникальный идентификационный код. Операционный терминал 5 включает в себя дисплей 53. Дисплей 53 представляет интерфейс ввода и различные элементы информации. Когда дисплей 53 является дисплеем с сенсорной панелью, он имеет функцию приема рабочей команды. Операционный терминал 5 может быть портативным аппаратом, таким как смартфон или КПК - карманный персональный компьютер, в котором установлены приложения для приема ввода рабочей команды, используемой в способе управления парковкой, в соответствии с одним или более вариантами осуществления настоящего изобретения, и передачи рабочей команды на устройство 100 управления парковкой.
[0013] Информационный сервер 3 является устройством предоставления информации, предусмотренным в сети, обеспечивающей возможность связи. Информационный сервер включает в себя устройство 31 связи и запоминающее устройство 32. Запоминающее устройство 32 включает в себя считываемую картографическую информацию 33, информацию 34 о стоянке и информацию 35 о препятствиях. Устройство 100 управления парковкой и операционный терминал 5 могут обращаться к запоминающему устройству 32 информационного сервера 3, чтобы получать каждый элемент информации.
[0014] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя управляющее устройство 10, устройство 20 ввода и устройство 30 вывода. Эти компоненты устройства 100 управления парковкой соединены друг с другом через местную контроллерную сеть (CAN) или другую бортовую локальную сеть для взаимного обмена информацией. Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает рабочую команду, переданную от внешнего операционного терминала 5, и вводит рабочую команду в устройство 20 ввода. Субъектом, который вводит рабочую команду на внешний операционный терминал 5, может быть человек (пользователь, пассажир, водитель или работник парковочного объекта). Устройство 20 ввода передает полученную рабочую команду на управляющее устройство 10. Устройство 30 вывода включает в себя дисплей 31. Устройство 30 вывода уведомляет водителя об информации управления парковкой. Дисплей 31 в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой дисплей с сенсорной панелью, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, он служит в качестве устройства 20 ввода. Даже когда транспортное средство V управляют на основе рабочей команды, которая вводится с операционного терминала 5, находящееся в транспортном средстве лицо (водитель или пассажир) может вводить другую рабочую команду, такую как команда на аварийную остановку, через устройство 20 ввода.
[0015] Управляющее устройство 10 устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой компьютер для управления парковкой, включающий в себя ПЗУ 12, в котором хранится программа управления парковкой, ЦП 11 в качестве операционной схемы, которая исполняет сохраненную в ПЗУ 12 программу для того, чтобы служить в качестве устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, и ОЗУ 13, которое служит в качестве доступного запоминающего устройства.
[0016] Программа управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения является программой для выбора второго положения с относительно высокой работоспособностью дистанционного управления из числа одного или более первых положений, в которых оператор M транспортного средства V может выйти из транспортного средства V, вычисления маршрута парковки и инструкции управления на основе рабочей команды, полученной от оператора M, который вышел из транспортного средства V во втором положении, и выполнения управления парковкой транспортного средства V в соответствии с инструкцией управления.
[0017] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой устройство с дистанционным управлением, которое принимает рабочую команду извне и управляет движением транспортного средства V для парковки транспортного средства V в заданное парковочное место. Во время этой операции находившиеся в транспортном средстве лица могут находиться за пределами салона транспортного средства или же могут находиться внутри салона транспортного средства. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения может быть типа с автономным (автоматизированным) управлением, при котором операция руления и операция ускорения/торможения выполняются автономно. Устройство 100 управления парковкой также может быть полуавтономного (полуавтоматического) типа, при котором операция руления выполняется автономно, в то время как водитель выполняет операцию ускорения/торможения. В программе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения пользователь может произвольно выбирать целевое положение парковки, или устройство 100 управления парковкой или сторона парковочного объекта могут автоматически устанавливать целевое положение парковки.
[0018] Управляющее устройство 10 устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения имеет функции выполнения процесса извлечения первых положений, процесса выбора второго положения, процесса вычисления маршрута парковки, процесса вычисления инструкции управления и процесса управления парковкой. Каждый из вышеупомянутых процессов выполняется путем взаимодействия программного обеспечения, предназначенного для реализации этого процесса, и вышеописанного аппаратного обеспечения.
[0019] Некоторые процессы обнаружения положения оператора М будут описаны со ссылкой на фиг. 2А-2D. Управляющее устройство 10 получает положение оператора М. Положение оператора М используется для расчета слепой зоны. Положение оператора M включает в себя информацию о положении и информацию о высоте на плоскости движения транспортного средства V. Положение оператора M может быть обнаружено на основе датчиковых сигналов от датчиков, предусмотренных в транспортном средстве V, или же может быть получено посредством обнаружения положения операционного терминала 5, переносимого оператором M, и вычисления положения оператора M на основе положения операционного терминала 5. Операционный терминал 5 может быть предусмотрен в заданном положении или может также переноситься оператором М. Когда операционный терминал 5 предусмотрен в заданном положении, оператор М приходит в положение, в котором предусмотрен операционный терминал 5, и использует операционный терминал 5 в этом положении. В этих случаях положение операционного терминала 5 может использоваться в качестве положения оператора М.
[0020] Как показано на фиг. 2А, положение оператора М обнаруживается на основе результатов обнаружения от множественных дальномерных устройств 2, предусмотренных в транспортном средстве, и/или изображений, снятых камерами 1. Положение оператора М может быть обнаружено на основе изображений, снятых камерами 1a-1d. Каждое используемое дальномерное устройство 2 может представлять собой радиолокационное устройство (радар), такое как радиолокационное устройство миллиметрового диапазона, лазерное радиолокационное устройство или ультразвуковое радиолокационное устройство или звуковой локатор (сонар). Множественные дальномерные устройства 2 и их результаты обнаружения могут быть идентифицированы, и поэтому двумерное положение и/или трехмерное положение оператора M могут быть обнаружены на основе результатов обнаружения. Дальномерные устройства 2 могут быть предусмотрены в тех же положениях, что и камеры 1a-1d, или могут быть также предусмотрены в иных положениях. Управляющее устройство 10 также может обнаруживать жест оператора M на основе изображений, снятых камерами 1a-1d, и идентифицировать связанную с этим жестом рабочую команду.
[0021] Как показано на фиг. 2B, положение операционного терминала 5 или положение оператора M, несущего операционный терминал 5, также может быть обнаружено на основе радиоволн связи между множественными антеннами 211, предусмотренными в разных положениях транспортного средства V и операционного терминала 5. Когда множественные антенны 211 обмениваются данными с одним операционным терминалом 5, интенсивность принимаемой радиоволны каждой антенны 211 отличается. Положение операционного терминала 5 может быть вычислено на основе разности интенсивности между принятыми радиоволнами антенн 211. Двумерное положение и/или трехмерное положение операционного терминала 5 или оператора М может быть вычислено из (на основе) разности интенсивности между принятыми радиоволнами антенн 211.
[0022] Как показано на фиг. 2C, заданное положение (направление/расстояние: D1, D2) относительно сиденья водителя DS транспортного средства V могут быть предварительно обозначены как рабочее положение оператора М или как положение, в котором расположен операционный терминал 5. Например, когда оператор М временно останавливает транспортное средство V в назначенном положении и выходит из транспортного средства V, чтобы задействовать операционный терминал 5, предусмотренный в заданном положении, можно вычислить начальное положение оператора М относительно транспортного средства V или начальное положение терминала 5, который переносится оператором М, относительно транспортного средства V.
[0023] Как показано на фиг. 2D аналогичным образом, информация изображения, представляющая рабочее положение (положение, в котором стоит оператор M: положение работы) относительно транспортного средства V, отображается на дисплее 53 операционного терминала 5. Это управление отображением может быть выполнено приложением, установленным на стороне операционного терминала 5, или же может быть выполнено на основе команды от управляющего устройства 10.
[0024] В одном или более вариантах осуществления настоящего изобретения вычисляют положение оператора M для вычисления второй зоны, которую оператор M может визуально распознать, или первой зоны (слепой зоны), которую оператор M не может визуально распознать. При вычислении второй зоны (или первой зоны) обнаруженное двумерное положение оператора М может быть вычислено в качестве положения наблюдения. В таком расчете может учитываться положение глаз оператора М (информация о высоте). Положение, соответствующее положению глаз оператора М, вычисляется в качестве положения наблюдения на основе двумерного положения операционного терминала 5, полученного по вышеупомянутой схеме. Положение наблюдения также может быть рассчитано с использованием предварительно установленной высоты стоящего оператора М или средней высоты стоящих взрослых. Когда сигнал обнаружения, представляющий информацию о местоположении операционного терминала 5, включает в себя информацию о высоте, положение операционного терминала 5 может использоваться в качестве положения наблюдения.
[0025] Процесс обнаружения препятствия будет описан со ссылкой на фиг. 3А и 3В. К препятствиям относятся конструкции и сооружения, такие как стены и столбы стоянки, установки вокруг транспортного средства, пешеходы, другие транспортные средства, припаркованные транспортные средства и т. д. Как показано на фиг. 3А, препятствие обнаруживается на основе результатов обнаружения от множественных дальномерных устройств 2, предусмотренных в транспортном средстве V, и изображений, снятых камерами 1. Дальномерные устройства 2 обнаруживают наличие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта на основе принятых сигналов от радиолокационных устройств (радаров). Дополнительно или альтернативно, наличие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта могут быть обнаружены на основе изображений, снятых камерами 1a-1d. Обнаружение препятствия может быть выполнено с использованием стереоскопического метода движения с камерами 1a-1d. Результаты обнаружения используются для определения того, является ли парковочное место пустым (припарковано ли или нет какое-то транспортное средство на парковочном месте).
[0026] Как показано на фиг. 3B, препятствия, включая конструкции, такие как стены и столбы парковки, могут быть обнаружены на основе информации 34 о стоянке, полученной из запоминающего устройства 32 информационного сервера 3. Информация о стоянке включает в себя местоположение и идентификационный номер каждой стоянки, а также информацию о местоположении проходов, столбов, стен, мест для хранения и т. д. на парковочном объекте. Информационный сервер 3 может управляться парковочными объектами.
[0027] Далее будет описан процесс вычисления первой зоны и/или второй зоны. Управляющее устройство 10 вычисляет в качестве первой зоны ту зону, в которой поле зрения затенено препятствием, когда оператор М наблюдает из положения наблюдения. Первая зона, которая является ненаблюдаемой или визуально не распознаваемой оператором M, может быть рассчитана из (на основе) взаимного пространственного расположения с препятствием. Слепая зона, вызванная не только препятствием, но и транспортным средством V в качестве цели операции, также может быть установлена в качестве первой зоны, которая визуально не распознается. Управляющее устройство 10 вычисляет в качестве первой зоны ту зону, в которой поле зрения затенено транспортным средством V в качестве цели операции, когда оператор М наблюдает из положения наблюдения. Первая зона, которую оператор M не может наблюдать, может быть рассчитана из (на основе) взаимного пространственного расположения с подлежащим парковке транспортным средством V. Исходя из взаимного пространственного расположения положения препятствия и положения оператора M, управляющее устройство 10 вычисляет вторую зону, наблюдаемую оператором M из вычисленного положения, в которой оператор M наблюдает за окружением. Управляющее устройство 10 вычисляет в качестве второй зоны ту зону, в которой поле зрения не затенено препятствием, когда оператор М наблюдает из положения наблюдения. Как будет понятно, к препятствиям относятся другие транспортные средства, которые не являются целями операции. С точки зрения уменьшения расчетной нагрузки управляющее устройство 10 может первоначально вычислить первую зону и установить зону, отличную от первой зоны, в качестве второй зоны. Дополнительно или альтернативно, первая зона может быть установлена как относительно широкая зона с учетом точности обнаружения препятствия и точности обнаружения местоположения оператора М.
[0028] Фиг. 4А иллюстрирует пример случая, в котором возникает слепая зона из-за конструкции стоянки. В примере по фиг. 4А поле зрения оператора М затенено стеной W стоянки. Управляющее устройство 10 вычисляет в качестве первой зоны BA ту зону, которая оценена как скрытая за стеной W и визуально не распознаваемая, когда оператор M наблюдает из положения VPO наблюдения. В примере, показанном на фиг. 4A, транспортное средство V1 перемещается/движется/ведется по маршруту RT парковки, и оператор M, стоящий сбоку от транспортного средства V1, управляет операционным терминалом 5. Управляющее устройство 10 вычисляет в качестве второй зоны VA ту зону, которая может быть оценена как визуально распознаваемая без затенения другим объектом, когда оператор M наблюдает из положения VPO наблюдения.
[0029] Фиг. 4B иллюстрирует пример случая, в котором возникает слепая зона из-за самого транспортного средства V в качестве цели управления. Управляющее устройство 10 вычисляет в качестве второй зоны VA ту зону, которая может быть оценена как визуально распознаваемая без затенения другим объектом, когда оператор M наблюдает из положения VPO наблюдения. В примере по фиг. 4B поле зрения оператора M затенено транспортным средством V2, которое расположено в положении поворота для парковки на предполагаемом маршруте парковки. Управляющее устройство 10 вычисляет в качестве первой зоны BA ту зону, которая оценена как скрытая за транспортным средством V2 и визуально не распознаваемая, когда оператор M наблюдает из положения VPO наблюдения. Управляющее устройство 10 предварительно хранит информацию о транспортном средстве, такую как высота и размер транспортного средства V, которая используется при вычислении первой зоны BA. Информация о транспортном средстве может быть информацией, уникальной для транспортного средства, или же может быть информацией, определенной в соответствии с типом транспортного средства и т.п. Как показано на фиг. 4C, на основе интенсивности принятых радиоволн, генерации отраженных волн, возникновения помех и многолучевого распространения и т. д. между устройством 51 связи и антенной 511 операционного терминала 5 и устройством 21 связи и антеннами 211 устройство 21 связи устройства 100 управления парковкой, наличие утопленной части может быть определено исходя из положения стены стоянки или формы пространства, и наличие слепой зоны может быть определено на основе результата такого определения.
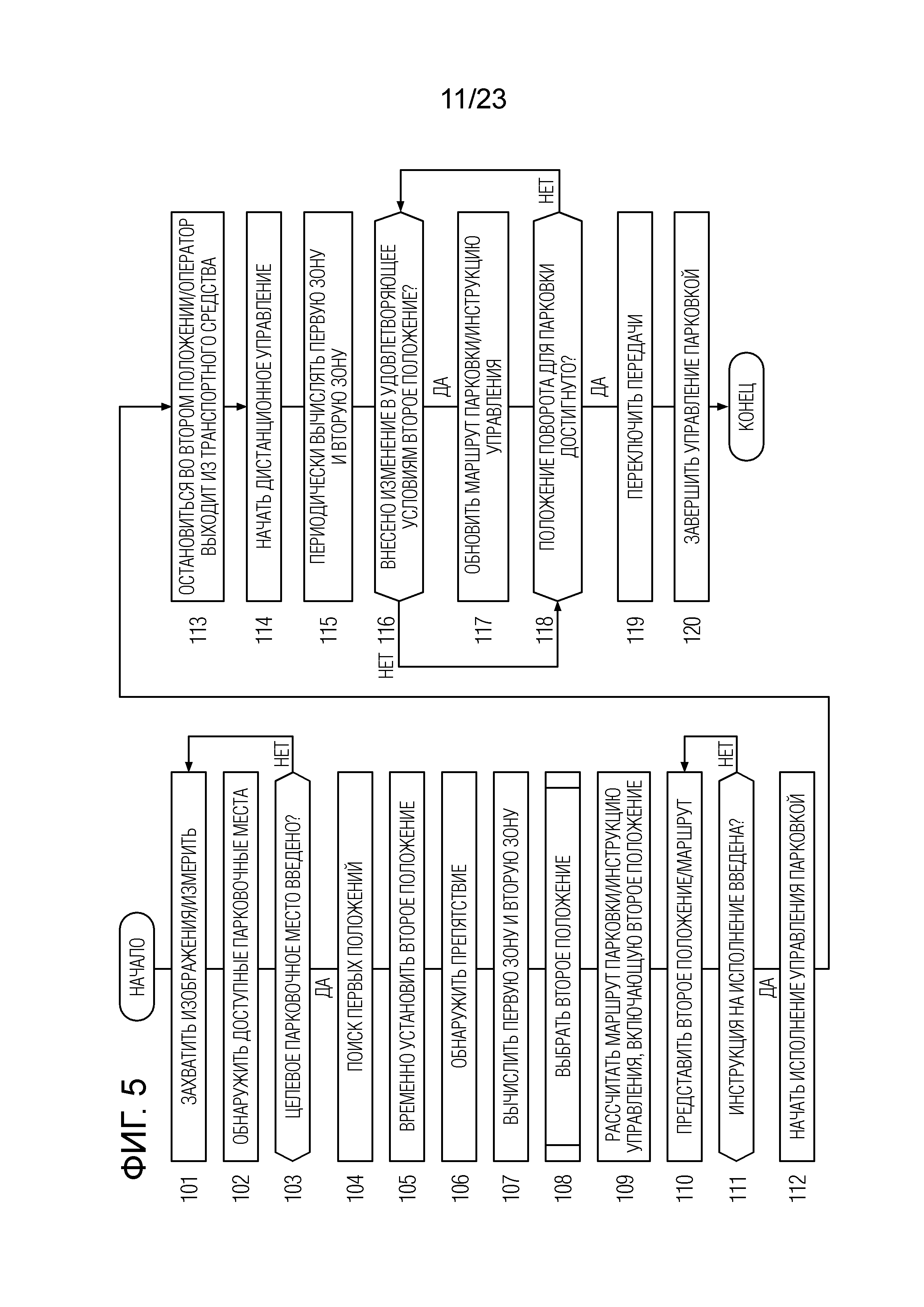
[0030] Процедура управления парковкой будет описана ниже со ссылкой на блок-схему, показанную на фиг. 5. На фиг.5 показана блок-схема последовательности операций, иллюстрирующая процедуру управления процессом управления парковкой, выполняемым системой 1000 управления парковкой, в соответствии с одним или более вариантами осуществления настоящего изобретения. Триггер для запуска процесса управления парковкой конкретно не ограничен, и процесс управления парковкой может запускаться с помощью включения пускового переключателя устройства 100 управления парковкой.
[0031] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения имеет функцию автономного перемещения транспортного средства V в парковочное место на основе рабочей команды, полученной извне транспортного средства.
[0032] На этапе 101 управляющее устройство 10 устройства 100 управления парковкой собирает информацию вокруг транспортного средства. Получение сигналов дальности и получение захваченных изображений может выполняться выборочно. Управляющее устройство 10 получает, при необходимости, сигналы дальности от дальномерных устройств 2, которые прикреплены к множественным местам транспортного средства V. Управляющее устройство 10 получает по мере необходимости изображения, которые снимаются камерами 1a-1d, прикрепленными к множественным местам транспортного средства V. Хотя это и не ограничено особым образом, камера 1a расположена на передней решетке транспортного средства V, камера 1d расположена вблизи заднего бампера, а камеры 1b и 1c расположены на нижних частях правого и левого зеркал заднего вида. Каждая из камер 1a-1d может быть камерой, имеющей широкоугольный объектив с широким углом обзора. Камеры 1a-1d снимают изображения пограничных линий парковочных мест вокруг транспортного средства V и объектов, существующих вокруг парковочных мест. Камеры 1a-1d могут быть ПЗС-камерами, инфракрасными камерами или другими соответствующими приборами формирования изображений.
[0033] На этапе 102 управляющее устройство 10 обнаруживает парковочные места, на которые возможна парковка. Управляющее устройство 10 обнаруживает разметку (зоны) парковочных мест на основе захваченных камерами 1a-1d изображений. Управляющее устройство 10 обнаруживает пустые парковочные места, используя данные обнаружения от дальномерных устройств 2 и данные обнаружения, извлеченные из захваченных изображений. Управляющее устройство 10 обнаруживает доступные парковочные места среди парковочных мест. Доступные парковочные места - это те парковочные места, которые пусты (т. е. где не припаркованы другие транспортные средства) и к которым можно рассчитать маршруты для совершения парковки. В одном или более вариантах осуществления настоящего изобретения условие, что маршрут парковки может быть рассчитан, означает, что траектория маршрута от текущего положения до целевого положения парковки может быть воспроизведена по координатам поверхности дороги без помех со стороны препятствий (включая припаркованные транспортные средства).
[0034] На этапе 103 управляющее устройство 10 передает доступные парковочные места на операционный терминал 5, управляет дисплеем 53 для отображения доступных парковочных мест и просит оператора M ввести информацию о выборе целевого положения парковки для парковки транспортного средства V. Целевое положение парковки может быть автоматически выбрано управляющим устройством 10 или стороной парковочного объекта. Когда рабочая команда указания парковочного места вводится в операционный терминал 5, это парковочное место устанавливается в качестве целевого положения парковки.
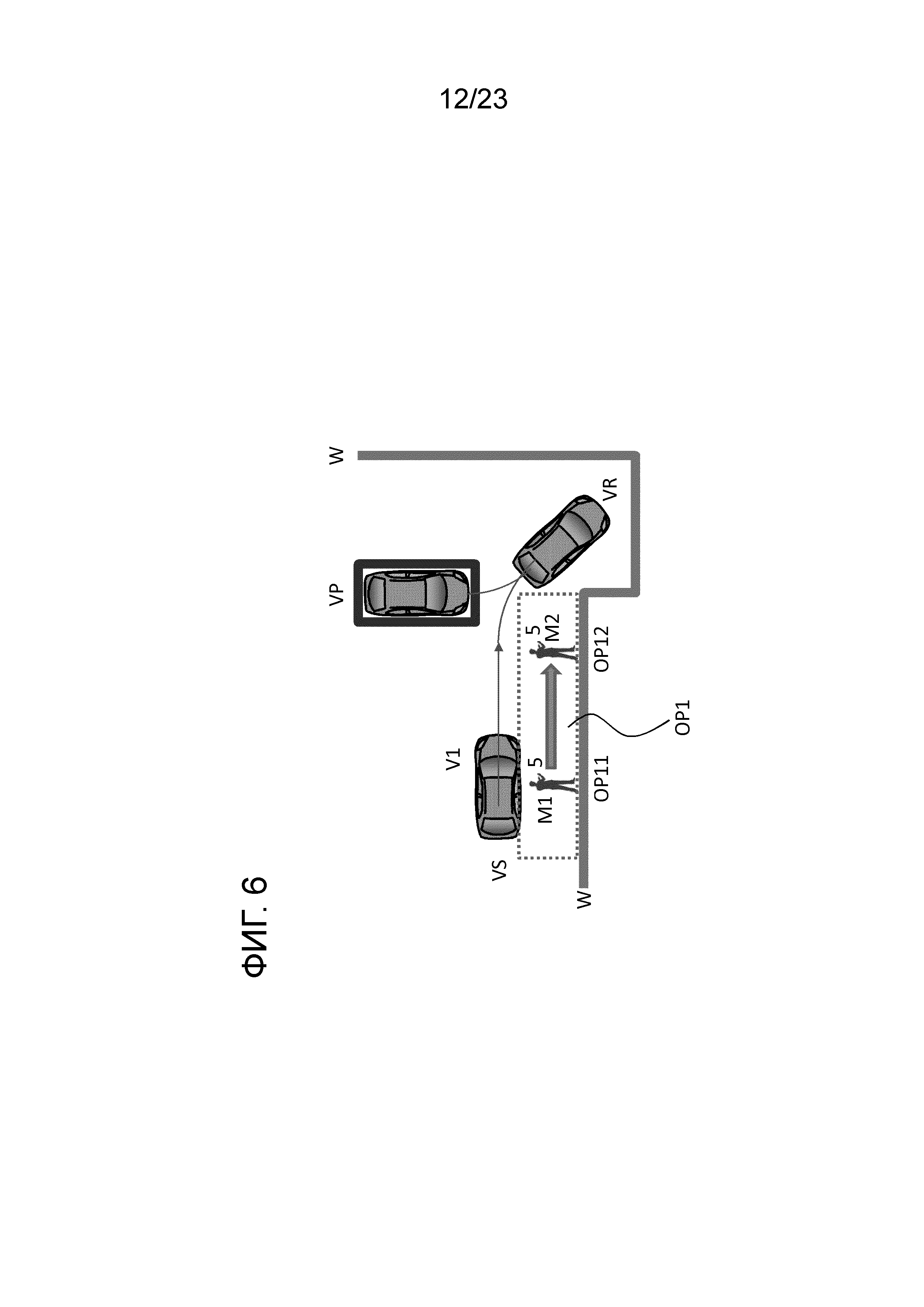
[0035] На этапе 104 управляющее устройство 10 ищет одно или более первых положений. Первые положения - это положения тех мест, в которых находящийся внутри транспортного средства оператор М может выйти из транспортного средства. Первые положения относятся к тем местам, которые являются достаточно широкими для того, чтобы находящееся в транспортном средстве лицо могло открыть дверь и выйти из транспортного средства. Форма и размер зоны, требуемой находящемуся в транспортном средстве лицу для открытия двери и выхода из транспортного средства, могут быть предварительно рассчитаны и сохранены. На маршруте к целевому месту парковки ищут места, в которых транспортное средство V может перемещаться и находящееся в транспортном средстве лицо может выйти из транспортного средства. Фиг. 6 иллюстрирует обнаруженное первое положение. Как показано на фиг. 6, первое положение OP1 может быть обнаружено как зона или же может быть обнаружено как точка. Зона, обнаруженная в качестве первого положения OP1, включает в себя два или более первых положения OP1, которые указаны точками.
[0036] На этапе 105 управляющее устройство 10 извлекает кандидатов на второе положение OP2 из одного или более первых положений OP1. В примере, показанном на фиг. 6, два или более первых положений OP1 установлены в первом положении OP1, которое ищется в качестве зоны. Фиг. 6 иллюстрирует управление парковкой, при котором транспортное средство V перемещается/движется/ведется из начальной точки VS управления парковкой в точку поворота для парковки VR и изменяет положение переключения передач на обратное в положении поворота для парковки VR, чтобы двигаться к целевому положению VP парковки. Два или более первых положений OP1 могут быть установлены с заданными интервалами или могут быть также установлены как координаты, которые удовлетворяют заданной функции. В примере, показанном на фиг. 6, два или более кандидатов на второе положение OP2 устанавливаются в первом положении OP1 как зона. В частности, среди точек, включенных в первое положение OP1, обнаруженное поблизости от начальной точки процесса управления парковкой транспортного средства V, в качестве кандидатов на второе положение OP2 извлекают первое положение OP11 и первое положение OP12, в которое может переместиться оператор M. Число кандидатов на второе положение OP2 не ограничено, и между первым положением OP11 и первым положением OP12 могут быть предусмотрены другие одно или более первых положений. Вышеописанные точки, в которые оператор M может перемещаться, и точки вдоль маршрута парковки могут быть извлечены в качестве кандидатов на второе положение OP2.
[0037] Для каждого из установленных кандидатов на второе положение OP2 оценивают работоспособность дистанционного управления и на основе результата оценки выбирают одно второе положение OP2. В одном или более вариантах осуществления настоящего изобретения, среди одного или более первых положений OP1 (кандидатов на второе положение OP2), в которых оператор M транспортного средства V может выйти из транспортного средства, выбирают одно второе положение OP2 с относительно высокой работоспособностью дистанционного управления. Работоспособность дистанционного управления определяется на основе легкости проверки окружения транспортного средства. В одном или более вариантах осуществления настоящего изобретения легкость проверки окружения транспортного средства определяется на основе наличия наблюдаемой зоны и ее площади, когда оператор М наблюдает из второго положения. Наблюдаемая зона определяется на основе целевого положения парковки или/и положения препятствия вокруг маршрута парковки. Наблюдаемая зона также может быть определена с точки зрения того, что она не является ненаблюдаемой зоной (не слепой зоной). То есть наблюдаемая зона может быть определена на основе того критерия, что она не принадлежит ненаблюдаемой зоне (слепой зоне).
[0038] На этапе 106 управляющее устройство 10 обнаруживает положение, в котором существует препятствие, с использованием ранее описанной схемы.
[0039] На этапе 107 управляющее устройство 10 вычисляет первую зону, не наблюдаемую оператором M из положения VPO наблюдения. Первую зону вычисляют на основании положения препятствия. Управляющее устройство 10 вычисляет вторую зону, наблюдаемую оператором M из положения VPO наблюдения. Вторую зону вычисляют на основании положения препятствия. Положение препятствия относится к положению той зоны, в которой существует препятствие. То есть, положение препятствия представлено значениями координат занятой препятствием зоны в трехмерных координатах.
[0040] На этапе 108 управляющее устройство 10 выбирает второе положение OP2 с относительно высокой работоспособностью дистанционного управления из числа одного или более первых положений OP1, в которых оператор M транспортного средства V может покинуть транспортное средство.
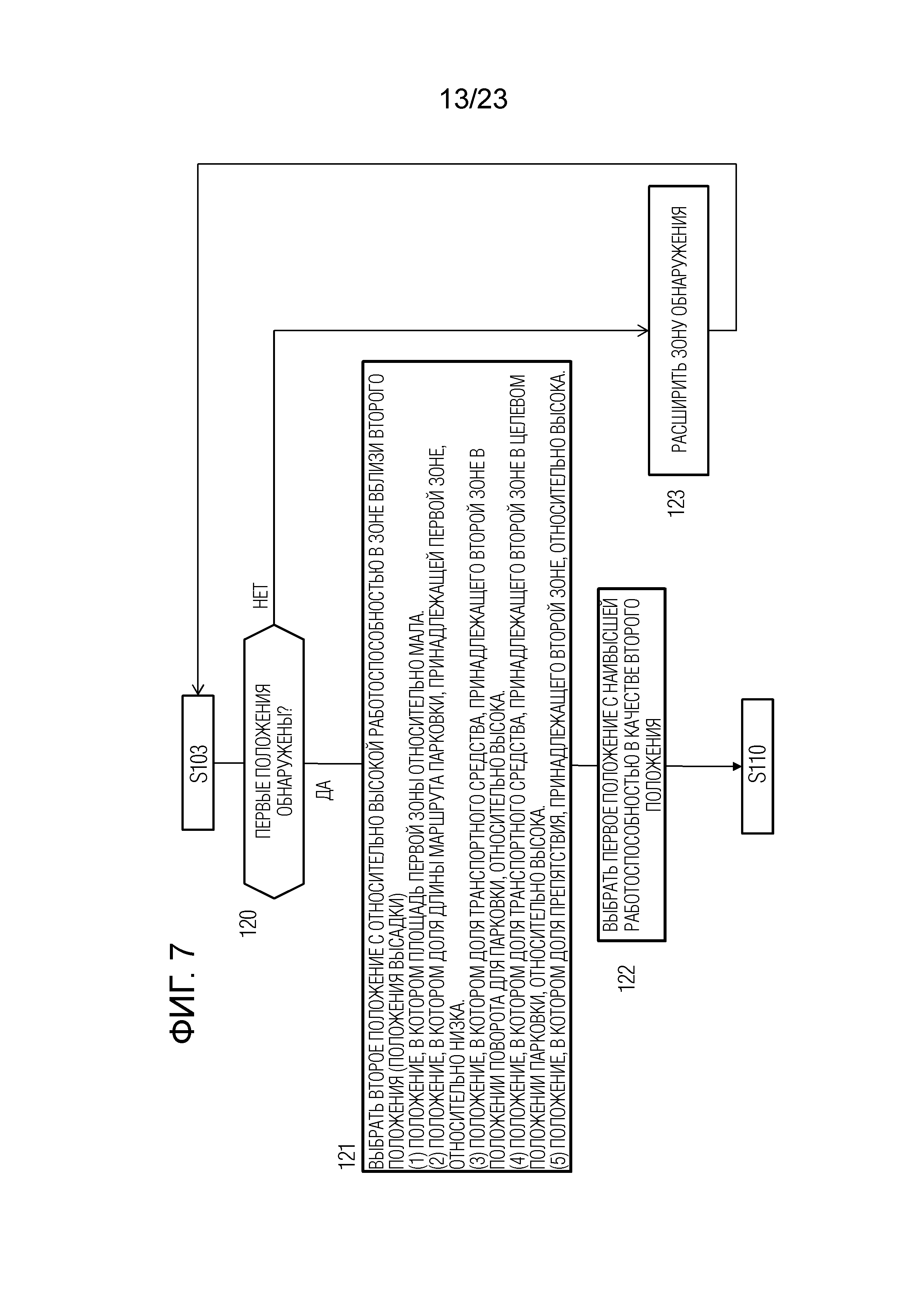
[0041] Фиг. 7 иллюстрирует подпрограмму этапа 108. На этапе 120 по фиг. 7 выполняют определение того, удалось ли обнаружить одно или более первых положений. В общем, предпочтительно, чтобы второе положение в качестве положения высадки было близким к целевому положению парковки, и поэтому зона обнаружения первых положений установлена на заданный диапазон расстояний от целевого положения парковки. Когда в этой зоне обнаружения не могут быть обнаружены никакие первые положения, процесс переходит к этапу 123, на котором зона обнаружения расширяется для обнаружения первых положений. Когда первое положение, обнаруженное при расширении зоны обнаружения, является вторым положением, то есть положением высадки, положение высадки и целевое положение парковки могут быть отделены друг от друга. Следовательно, в таком случае рабочее положение, близкое к целевому положению парковки, устанавливается по-разному. Когда установлено рабочее положение, отличное от положения высадки, позиционная информация об установленном втором положении (положении высадки) представляется оператору М. Кроме того, предпочтительно представить оператору М маршрут из второго положения (положения высадки) в рабочее положение вместе с позиционной информацией о втором положении.
[0042] На этапе 121 управляющее устройство 10 выбирает второе положение с относительно высокой работоспособностью при выполнении дистанционного управления в зоне, близкой ко второму положению (окрестности положения высадки). Оценочный показатель для определения работоспособности дистанционного управления заключается в том, что оператор M может легко подтвердить ситуацию вокруг транспортного средства в качестве цели операции, состояние транспортного средства V, движущегося по маршруту парковки, и ситуацию вокруг транспортного средства V, состояние целевого положения парковки и ситуацию вокруг целевого положения парковки, а также состояние положения поворота для парковки транспортного средства V и ситуацию вокруг положения поворота для парковки.
[0043] Оператор M, который выполняет дистанционное управление, обращает внимание на окружение транспортного средства V в качестве цели операции, чтобы подтвердить безопасность операции. Если окружение транспортного средства V в качестве цели операции не может быть визуально распознано, работоспособность дистанционного управления оценивается как низкая, поскольку будет трудно выполнить дистанционное управление, такое как, например, управление транспортным средством с остановкой из-за приближающегося препятствия или управление транспортным средством с приближением к препятствию, когда транспортное средство движется по маршруту парковки. Причина этого ухудшения работоспособности обусловлена окружающей средой, такой как взаимное пространственное расположение оператора M, транспортного средства V и препятствия, но также влияет на простоту использования и надежность устройства помощи при парковке с дистанционным управлением.
[0044] Управляющее устройство 10 в соответствии с одним или более вариантами осуществления настоящего изобретения предварительно оценивает работоспособность дистанционного управления, которая изменяется в зависимости от положения оператора М и окружающей среды, и управляет транспортным средством, чтобы сделать остановку во втором положении с относительно высокой работоспособностью. Управляющее устройство 10 указывает остановку транспортного средства V и может также указывать положение высадки для оператора M, открывая дверь транспортного средства V по мере необходимости. Второе положение, которое является положением высадки, является положением с высокой дистанционной работоспособностью. Управляющее устройство 10 выбирает такое второе положение, в которой работоспособность постоянно хорошая, если оператор М выполняет дистанционное управление после выхода из транспортного средства, и поэтому может выполнять управление парковкой постоянно с хорошей работоспособностью без влияния окружающей среды вокруг целевого положения парковки.
[0045] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения может оценивать работоспособность дистанционного управления на основе положений и площадей ненаблюдаемой первой зоны (слепой зоны) и наблюдаемой второй зоны для оператора М при наблюдении из положения высадки (второго положения OP2). В одном или более вариантах осуществления настоящего изобретения, чтобы объективно или количественно оценить работоспособность дистанционного управления, внимание сосредотачивается на (A) площади первой зоны (слепой зоны), (B) доле длины маршрута парковки, принадлежащей первой зоне, (C) доле площади транспортного средства, принадлежащей второй зоне в положении поворота для парковки, (D) доле площади транспортного средства, принадлежащей второй зоне в целевом положении парковки, и/или (E) доле препятствия, принадлежащего второй зоне, в качестве оценочных значений. Второе положение выбирают на основе одного или более из этих оценочных значений. Второе положение является контрольным положением для определения первой зоны и второй зоны. При изменении второго положения могут быть изменены положения и площади первой зоны и второй зоны.
[0046] Второе положение может быть выбрано с использованием одного оценочного значения из вышеуказанных оценочных значений или может быть также выбрано с использованием двух или более оценочных значений. При использовании двух или более оценочных значений результат, основанный на каждом оценочном значении, может быть взвешен по работоспособности, и первое положение, в котором работоспособность всесторонне определена как высокая, может быть выбрано в качестве второго положения.
[0047] Ниже будут описаны пять схем выбора в одном или более вариантах осуществления настоящего изобретения. (1) Первая схема включает в себя выбор из числа первых положений того положения, в котором транспортное средство, движущееся по маршруту парковки, можно наблюдать от оператора, в качестве второго положения. В частности, в качестве второго положения выбирается первое положение, в котором площадь первой зоны (слепой зоны), наблюдаемой со стороны оператора, является относительно малой. Управляющее устройство 10 вычисляет первую зону, которая рассчитывается на основе взаимного пространственного расположения каждого первого положения и обнаруженного препятствия и которая не наблюдается со стороны оператора М в первом положении. В качестве второго положения выбирается первое положение, в котором площадь первой зоны является относительно малой, и поэтому в качестве второго положения выбирается положение, в котором движущееся по маршруту парковки транспортное средство можно наблюдать от оператора.
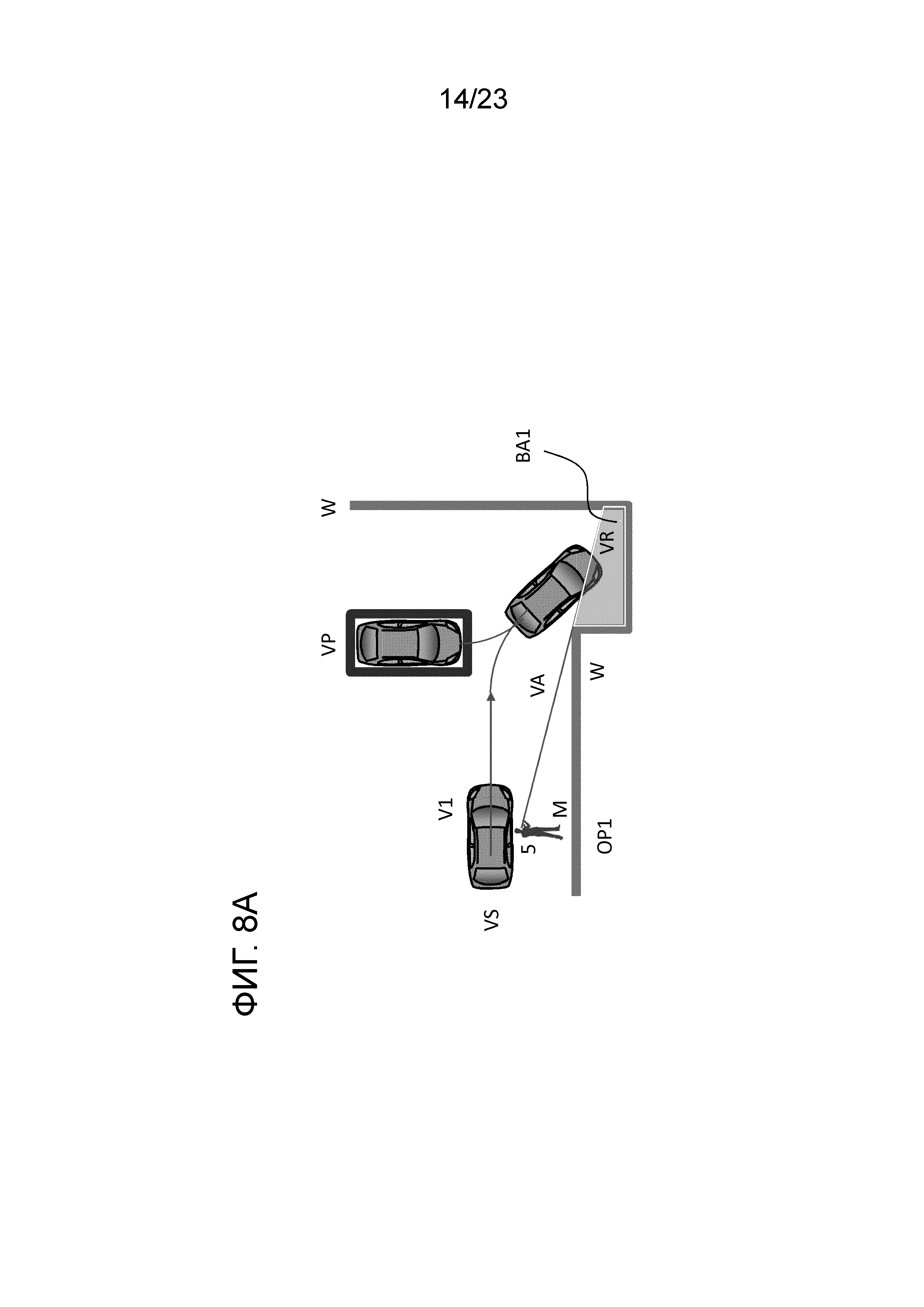
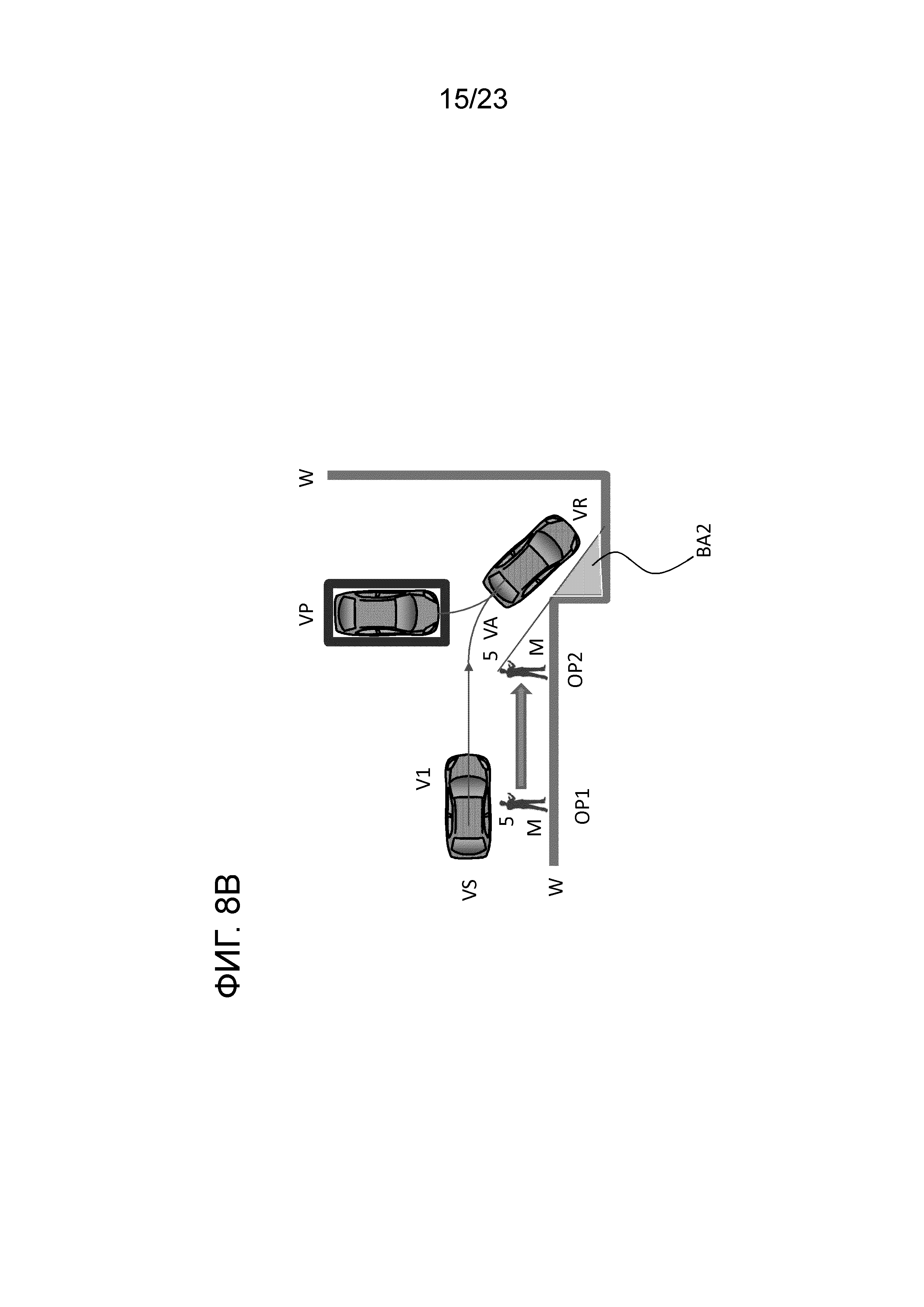
[0048] Фиг. 8А и фиг. 8B каждая иллюстрирует пример, в котором площадь первой зоны изменяется в зависимости от положения оператора M. На этих фигурах показано положение транспортного средства V1, которое перемещается под управлением парковкой. Транспортное средство V1 движется от начальной точки VS управления парковкой к точке поворота для парковки VR и переключает передачи в положении поворота для парковки VR, чтобы двигаться дальше в целевое положение VP парковки. Когда оператор M наблюдает за движением транспортного средства V1 из первого положения OP1, показанного на фиг. 8А, образуется первая зона (слепая зона) ВА1, которая ненаблюдаема из-за стенки W. Фиг. 8B иллюстрирует первую зону BA2, когда оператор M наблюдает за движением транспортного средства V1 из первого положения OP2, отличного от первого положения OP1. Площадь первой зоны BA2 для оператора M в первом положении OP2 меньше, чем площадь первой зоны BA1 для оператора M в первом положении OP1. То есть первое положение OP1 перемещается в первое положение OP2, и тем самым может быть уменьшена площадь ненаблюдаемой первой зоны BA. В этом примере два положения из первых положений OP1 и OP2 сравниваются друг с другом, но площади первых зон BA могут сравниваться для трех или более первых положений OP3-OPn для того, чтобы выбрать в качестве второго положения OP2 первое положение OPn, имеющее наименьшую площадь. В примере, показанном на фиг. 8A, правая передняя часть транспортного средства V1 принадлежит первой зоне BA1 и ее нельзя наблюдать со стороны оператора M, но в примере, показанном на фиг. 8B, транспортное средство V1 не принадлежит первой зоне BA2, и оператор M может наблюдать за транспортным средством V1. Работоспособность для оператора М выше, когда площадь слепой зоны, которая скрыта за препятствием и не видна, является малой, а не большой.
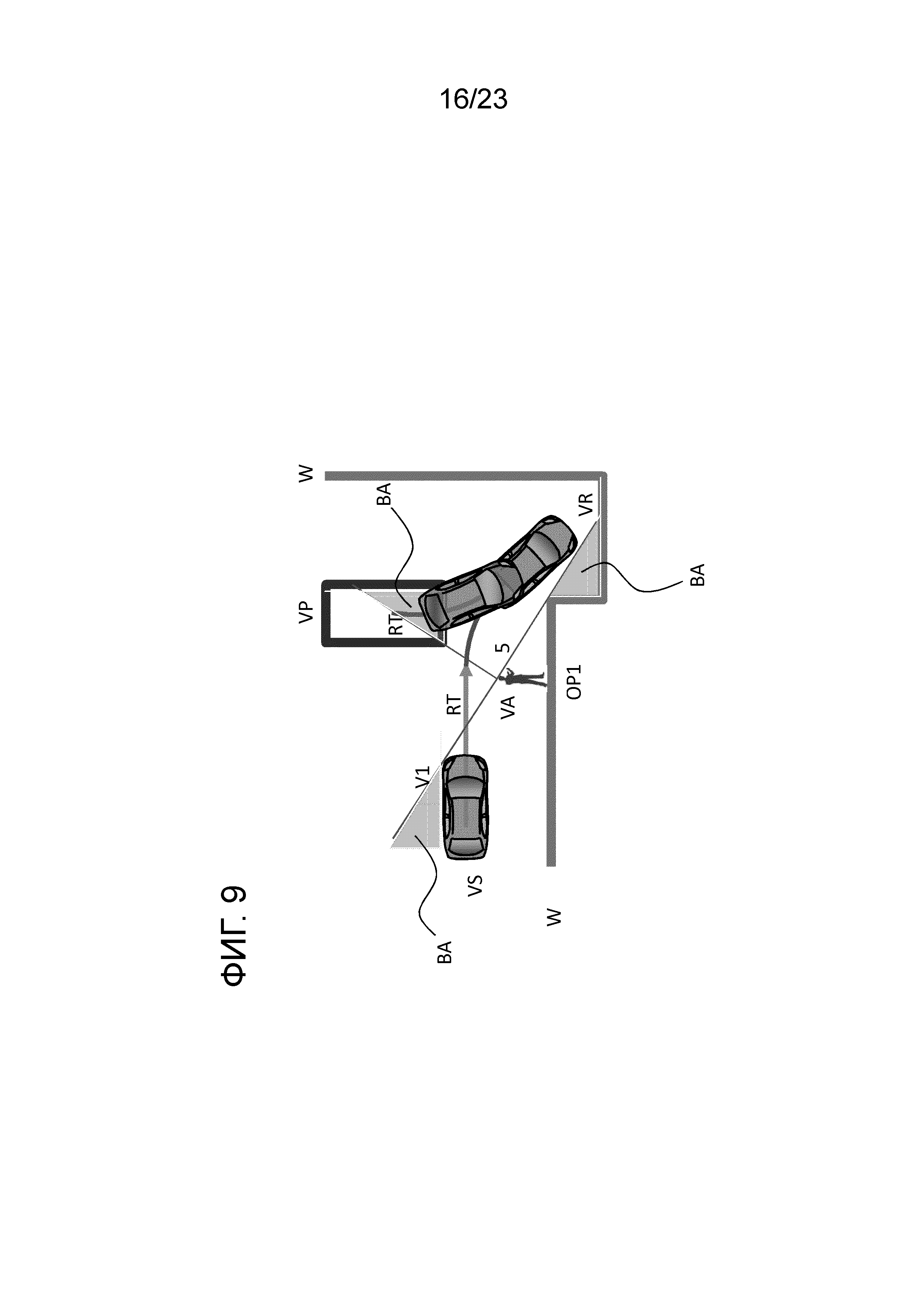
[0049] На ранее упомянутых фиг. 8А и фиг. 8B сравнивается площадь первой зоны BA в положении поворота для парковки VR, но, как показано на фиг. 9, сравнение может быть выполнено для общей площади первых зон BA1, которые появляются в начальном положении VS управления парковкой, положении поворота для парковки VR и целевом положении VP парковки. Конечно, сравнение также может быть выполнено для интегрального значения первой зоны (слепой зоны), которая возникает от начальной точки до точки завершения управления парковкой при наблюдении из первого положения. В примере по фиг. 9 иллюстрируется случай, в котором положение оператора M является первым положением OP1, но первое положение OP1 может быть изменено соответствующим образом для сравнения общей площади первых зон BA1, которые появляются в начальном положении VS управления парковкой, положении поворота для парковки VR и целевом положении VP парковки. Сравнивая работоспособность для оператора M на основе общей площади первых зон BA1, которые появляются в начальном положении VS управления парковкой, положении поворота для парковки VR и целевом положении VP парковки, легкость наблюдения и работоспособность для оператора M можно оценить надлежащим образом в каждой точке из начального положения VS управления парковкой, положения поворота для парковки VR и целевого положения VP парковки, которым следует уделять внимание на маршруте парковки. Дополнительно или альтернативно, легкость наблюдения за транспортным средством V1, подвергаемым управлению парковкой, может оцениваться на основе расстояния между первым положением OP1 и каждой точкой (начальным положением VS управления парковкой, положением поворота для парковки VR, целевым положением VP парковки). Угол обзора становится шире по мере того, как сокращается расстояние между первым положением OP1 и каждой точкой (поскольку первое положение OP1 и каждая точка приближаются друг к другу), и поэтому ненаблюдаемая первая зона BA естественным образом уменьшается. Таким образом, может быть сделано определение, что работоспособность дистанционного управления становится относительно выше по мере того, как сокращается расстояние между первым положением OP1 и каждой точкой (поскольку первое положение OP1 и каждая точка приближаются друг к другу).
[0050] Выбирая в качестве второго положения первое положение, в котором площадь каждой первой зоны относительно мала, возможно улучшить работоспособность для оператора M, который дистанционно управляет транспортным средством V1. Чтобы обеспечить легкость минимального подтверждения, в качестве второго положения может быть также выбрано первое положение, в котором площадь первой зоны меньше заданного значения. Дополнительно или альтернативно, в качестве второго положения может быть выбрано первое положение, в котором площадь каждой первой зоны является наименьшей, или в качестве второго положения также может быть выбрано первое положение, в котором площадь каждой второй зоны является наибольшей.
[0051] (2) Вторая схема включает в себя выбор из числа первых положений того положения, в котором маршрут парковки можно наблюдать от оператора, в качестве второго положения. В частности, в качестве второго положения выбирается первое положение, в котором доля длины маршрута парковки, принадлежащей первой зоне (слепой зоне), наблюдаемой со стороны оператора, является относительно низкой, и тем самым в качестве второго положения выбирается положение, в котором маршрут парковки можно наблюдать со стороны оператора. Термин «доля длины маршрута парковки, принадлежащей первой зоне (слепой зоне)» относится к отношению длины RTB маршрута парковки, принадлежащей первой зоне, к общей длине RTL маршрута парковки (RTB/RTL). Оператор M, который выполняет дистанционное управление, наблюдает за движущимся по маршруту парковки транспортным средством V1, и поэтому не является предпочтительным, чтобы маршрут парковки принадлежал ненаблюдаемой первой зоне BA. Чтобы выбрать первое положение OP1, в котором работоспособность дистанционного управления является относительно высокой, вычисляют отношение длины маршрута, принадлежащей первой зоне BA, к общей длине маршрута парковки, и первое положение, в котором это отношение относительно низко, определяется как положение, в котором работоспособность является относительно высокой. Исходя из этой же точки зрения, может быть вычислено отношение длины маршрута, принадлежащей наблюдаемой второй зоне VA, к общей длине маршрута парковки, и первое положение, в котором это отношение является относительно высоким, может быть определено как положение, в котором работоспособность относительно высока.
[0052] Выбирая из числа первых положений в качестве второго положения то положение, в котором маршрут парковки можно наблюдать от оператора, можно улучшить работоспособность для оператора M, который дистанционно управляет транспортным средством V1, по сравнению с положением, в котором маршрут парковки является ненаблюдаемым от оператора М. Дополнительно или альтернативно, выбрав в качестве второго положения первое положение, в котором отношение длины маршрута, принадлежащей первой зоне, к длине маршрута парковки является относительно низким, возможно дальнейшее улучшение работоспособности для оператора М, который дистанционно управляет транспортным средством V1. Для обеспечения простоты минимального подтверждения в качестве второго положения также может быть выбрано первое положение, в котором отношение длины маршрута парковки, принадлежащей первой зоне, меньше заданной доли. Дополнительно или альтернативно, в качестве второго положения может быть выбрано первое положение, в котором отношение длины маршрута парковки, принадлежащей первой зоне (слепой зоне), является наименьшим, или отношение длины маршрута парковки, принадлежащей второй зоне, является наибольшим. Угол обзора становится шире по мере того, как становится короче расстояние между первым положением OP1 и маршрутом парковки (когда первое положение OP1 и маршрут парковки приближаются друг к другу), и поэтому ненаблюдаемая первая зона BA уменьшается. Таким образом, может быть сделано определение, что работоспособность дистанционного управления становится относительно выше по мере того, как сокращается расстояние между первым положением OP1 и маршрутом парковки (поскольку первое положение OP1 и маршрут парковки приближаются друг к другу).
[0053] (3) Третья схема включает в себя выбор из числа первых положений того положения, в котором положение поворота для парковки вдоль маршрута парковки можно наблюдать от оператора, в качестве второго положения. В частности, в качестве второго положения выбирается первое положение, в котором относительно высока доля транспортного средства V, принадлежащего второй зоне (наблюдаемой зоне) в положении поворота для парковки VR, при наблюдении оператором, и в качестве второго положения выбирается положение, в котором положение поворота для парковки вдоль маршрута парковки может наблюдаться оператором. Термин «доля транспортного средства V, принадлежащего второй зоне (наблюдаемой зоне) в положении поворота для парковки VR» относится к отношению частичной площади VRP транспортного средства V, принадлежащей второй зоне, ко всей площади VRA, занимаемой транспортным средством V в положении поворота для парковки VR (VRP/VRA). Легкость наблюдения в положении поворота для парковки VR, на которую следует обратить внимание на маршруте парковки, влияет на работоспособность для оператора М.
[0054] Как показано на фиг. 10, когда высока доля площади присутствия транспортного средства V1 (занятой площади), принадлежащей наблюдаемой второй зоне VA в положении поворота для парковки VR, определяется, что работоспособность дистанционного управления относительно выше, чем когда эта доля низка. С той же точки зрения, в качестве второго положения также может быть выбрано первое положение, в котором доля площади присутствия транспортного средства V1, принадлежащей первой зоне (слепой зоне) в положении поворота для парковки VR, относительно низка. Выбирая в качестве второго положения первое положение, в котором доля транспортного средства V, принадлежащего второй зоне (наблюдаемой зоне) в положении поворота для парковки VR, относительно высока, можно легко подтвердить нахождение транспортного средства V в положении поворота для парковки VR и можно улучшить работоспособность для оператора M, который дистанционно управляет транспортным средством V1. Чтобы обеспечить простоту минимального подтверждения, в качестве второго положения также может быть выбрано первое положение, в котором доля транспортного средства V, принадлежащего второй зоне (наблюдаемой зоне) в положении поворота для парковки VR, не меньше, чем заданная доля. Дополнительно или альтернативно, в качестве второго положения может быть выбрано первое положение, в котором доля площади транспортного средства V в положении поворота для парковки VR, принадлежащей второй зоне VA, является наибольшей, или доля площади транспортного средства V в положении поворота для парковки VR, принадлежащей первой зоне BA, относительно низка. Угол обзора становится шире по мере того, как становится короче расстояние между первым положением OP1 и положением поворота для парковки VR (когда первое положение OP1 и положение поворота для парковки VR приближаются друг к другу), и поэтому ненаблюдаемая первая зона BA уменьшается. Таким образом, может быть сделано определение, что работоспособность дистанционного управления относительно становится выше по мере того, как сокращается расстояние между первым положением OP1 и положением поворота для парковки VR (поскольку первое положение OP1 и положение поворота для парковки VR становятся ближе друг к другу).
[0055] (4) Четвертая схема включает в себя выбор из числа первых положений того положения, в котором оператор видит целевое положение парковки, в качестве второго положения. В частности, в качестве второго положения выбирается первое положение, в котором относительно высока доля транспортного средства V, принадлежащего второй зоне (наблюдаемой зоне) в целевом положении VP парковки, и тем самым в качестве второго положения выбирается положение, в котором целевое положение парковки можно наблюдать от оператора. Термин «доля транспортного средства V, принадлежащего второй зоне (наблюдаемой зоне) в целевом положении VP парковки» относится к отношению частичной площади VPP транспортного средства, принадлежащей второй зоне, ко всей площади VPA, занимаемой транспортным средством V в целевом положении VP парковки (VPP/VPA). Легкость наблюдения в целевом положении VP парковки, на которую следует обратить внимание на маршруте парковки, влияет на работоспособность для оператора M. Как показано на фиг. 11, когда доля целевого положения VP парковки, принадлежащего наблюдаемой второй зоне VA, является высокой, то есть когда высока доля площади присутствия транспортного средства V1, принадлежащей наблюдаемой второй зоне VA, при движении к целевому положению VP парковки, работоспособность дистанционного управления определяется как относительно более высокая, чем при низкой доле. С той же точки зрения, в качестве второго положения также может быть выбрано первое положение, в котором относительно низка доля площади целевого положения VP (зоны) парковки, принадлежащей первой зоне (слепой зоне). Выбрав в качестве второго положения первое положение, в котором доля площади присутствия транспортного средства V, принадлежащей второй зоне (наблюдаемой зоне) в целевом положении VP парковки, является относительно высокой, можно легко подтвердить нахождение транспортного средства V1 в целевом положении VP парковки и можно улучшить работоспособность для оператора M, который выполняет дистанционное управление. Для обеспечения простоты минимального подтверждения в качестве второго положения также может быть выбрано первое положение, в котором доля транспортного средства V, принадлежащего второй зоне (наблюдаемой зоне) в целевом положении VP парковки, не меньше, чем заданная доля. Дополнительно или альтернативно, в качестве второго положения может быть выбрано первое положение, в котором доля площади целевого положения VP (зоны) парковки, принадлежащей первой зоне BA, является наименьшей, или доля площади целевого положения VP (зоны) парковки, принадлежащей второй зоне VA, является наивысшей. Угол обзора становится шире по мере того, как сокращается расстояние между первым положением OP1 и целевым положением VP парковки (поскольку первое положение OP1 и целевое положение VP парковки приближаются друг к другу), и поэтому ненаблюдаемая первая зона BA уменьшается. Таким образом, может быть сделано определение, что работоспособность дистанционного управления становится относительно более высокой по мере того, как сокращается расстояние между первым положением OP1 и целевым положением VP парковки (поскольку первое положение OP1 и целевое положение VP парковки приближаются друг к другу).
[0056] (5) Пятая схема включает в себя выбор из числа первых положений того положения, в котором оператору видно препятствие, в качестве второго положения. В частности, в качестве второго положения выбирается первое положение, в котором доля препятствия, принадлежащего второй зоне (наблюдаемой зоне) при наблюдении оператором, является относительно высокой, и тем самым в качестве второго положения из числа первых положений выбрано положение, в котором препятствие является наблюдаемым со стороны оператора. Термин «доля препятствия, принадлежащего второй зоне (наблюдаемой зоне)» относится к отношению частичной площади OBP препятствия, принадлежащей второй зоне, ко всей занятой препятствием площади OBA (OBP/OBA). Легкость наблюдения за наличием препятствия, на которое следует постоянно обращать внимание при управлении парковкой, влияет на работоспособность для оператора М. Как показано на фиг. 12, когда высока доля площади присутствия препятствия OB, принадлежащей наблюдаемой второй зоне VA, работоспособность дистанционного управления определяется как относительно более высокая, чем когда эта доля низка. С той же точки зрения, в качестве второго положения также может быть выбрано первое положение, в котором относительно низка доля площади препятствия OB (зоны), принадлежащей первой зоне (слепой зоне). Выбирая в качестве второго положения первое положение, в котором доля площади присутствия препятствия OB, принадлежащей второй зоне (наблюдаемой зоне), является высокой, можно улучшить работоспособность для оператора M, который дистанционно управляет транспортным средством V1. Чтобы обеспечить простоту минимального подтверждения, в качестве второго положения также может быть выбрано первое положение, в котором доля препятствия, принадлежащего второй зоне (наблюдаемой зоне), не меньше, чем заданная доля. Дополнительно или альтернативно, в качестве второго положения может быть выбрано первое положение, в котором доля площади препятствия OB (зоны), принадлежащей первой зоне BA, является наименьшей, или доля площади препятствия OB (зоны), принадлежащей второй зоне VA, является наибольшей. Угол обзора становится шире по мере того, как становится короче расстояние между первым положением OP1 и препятствием (поскольку первое положение OP1 и препятствие приближаются друг к другу), и поэтому ненаблюдаемая первая зона BA уменьшается. Таким образом, может быть сделано определение, что работоспособность дистанционного управления становится относительно более высокой по мере того, как сокращается расстояние между первым положением OP1 и препятствием (поскольку первое положение OP1 и препятствие приближаются друг к другу).
[0057] На этапе 122 по фиг. 7 в качестве второго положения выбирают первое положение, имеющее относительно высокое оценочное значение работоспособности дистанционного управления, полученное с помощью вышеуказанной схемы или вышеуказанных схем. Работоспособность дистанционного управления может быть оценена с использованием одной из вышеуказанных схем или же может быть оценена путем объединения двух или более из этих схем.
[0058] Обращаясь снова к фиг. 5, выполняют процессы этапа 109 и последующих этапов. На этапе 109 управляющее устройство 10 вычисляет маршрут парковки, который включает в себя второе положение в качестве положения высадки, до целевого положения парковки. Маршрут парковки включает в себя положение поворота для парковки, необходимое для перемещения на парковочное место. Для этой операции маршрут парковки задается как линия, а также задается как зона в форме полосы, соответствующей занимаемой транспортным средством V площади, на основе ширины транспортного средства. Площадь, занимаемая паркующимся транспортным средством V, задается с учетом ширины транспортного средства и запаса ширины, обеспечиваемого для движения при парковке.
[0059] На этапе 109 управляющее устройство 10 генерирует инструкцию управления для перемещения транспортного средства V по рассчитанному маршруту парковки. Управляющее устройство 10 предварительно хранит необходимую для инструкции управления информацию о спецификации транспортного средства V. Примеры инструкции управления включают в себя инструкции по величине поворота руля, скорости поворота руля, ускорению поворота руля, положению переключения передач, скорости (включая нулевую), ускорению и замедлению транспортного средства V, которые связаны с тем моментом времени или положением, когда транспортное средство V движется по маршруту парковки, и другие инструкции по работе. Инструкция управления включает в себя время исполнения или положение исполнения вышеупомянутой инструкции по работе транспортного средства V. Инструкция, касающаяся маршрута парковки, и инструкция по работе, связанная с маршрутом парковки, исполняются транспортным средством V, и тем самым транспортное средство может перемещаться к целевому положению парковки (парковаться в нем). Инструкция управления в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя инструкцию для остановки транспортного средства V во втором положении. Дополнительно или альтернативно, инструкция управления может включать в себя операцию открытия двери транспортного средства V во втором положении.
[0060] На этапе 110 управляющее устройство 10 представляет оператору М второе положение, которым является место высадки, и рассчитанный маршрут парковки.
[0061] На этапе 111 оператор M подтверждает маршрут парковки, и когда вводится инструкция на исполнение, процесс переходит к этапу 112, на котором начинается исполнение управления парковкой. Когда управление парковкой начато на этапе 112, затем, на этапе 113, транспортное средство V останавливается во втором положении. Оператор М выходит из транспортного средства (покидает его) во втором положении, и с этого положения начинается дистанционное управление.
[0062] На этапах 112 и 113 оператор М может быть сбит с толку, если не предоставлена информация о последовательности операций, таких как автономное вождение во второе положение и высадка. По этой причине управляющее устройство 10 приводит на дисплее 31 транспортного средства V руководящую информацию о направлении к выбранному второму положению. В качестве примера, как показано на фиг. 13А, представлено положение высадки, и оператору М передается план, по которому транспортное средство V перемещается в положение высадки. Оператор М предварительно информируется о том, что транспортное средство V движется в положение высадки, и поэтому оператор М может быть освобожден. Затем, как показано на фиг. 13B, когда транспортное средство V прибывает в положение высадки, управляющее устройство 10 предлагает оператору M выйти из транспортного средства. Оператор М может выйти из транспортного средства в выбранном управляющим устройством 10 втором положении, в котором работоспособность дистанционного управления является высокой.
[0063] Дополнительно или альтернативно, в зависимости от конструкции парковки, оператор М может быть направлен в положение, отличное от второго положения. Рабочее положение может быть установлено на стоянке. Управляющее устройство 10 отображает на бортовом дисплее 31 второе положение в качестве положения высадки и информацию о направлении в положение А, которое отличается от второго положения. В качестве примера, как показано на фиг. 14А, представлено положение высадки (второе положение), и оператору М передается информация о направлении в положение А, отличное от второго положения. Оператору М предписано перейти в положение А (второе положение) после выхода из транспортного средства и выполнить дистанционное управление после такого передвижения. В частности, приводится текстовая информация «Пожалуйста, переместитесь в положение A перед операцией», чтобы направить оператора M в положение A.
[0064] Управляющее устройство 10 управляет транспортным средством V, чтобы оно двигалось к месту, в котором транспортное средство может сделать остановку, и затем направляет оператора M перейти пешком в положение A. Эта руководящая информация позволяет оператору M понять, что оператор M должен переместиться в положение A после выхода из транспортного средства, но после выхода из транспортного средства оператор M не может видеть бортовой дисплей 31 и может не знать, как перейти в положение A. При подготовке к такой ситуации управляющее устройство 10 управляет дисплеем 53 операционного терминала 5, переносимого оператором М, для предоставления руководящей информации о направлении в положение А, отличное от второго положения. В качестве примера, как показано на фиг. 14B, когда транспортное средство V прибывает в положение высадки, управляющее устройство 10 предлагает оператору M сойти с транспортного средства и представляет маршрут движения после выхода из транспортного средства. Это позволяет оператору М перемещаться в положение А в соответствии с информацией, приведенной на дисплее 53 операционного терминала 5.
[0065] Предоставленная на бортовом дисплее 31 информация позволяет оператору М быть предварительно проинформированным о том, что транспортное средство V должно переместиться в положение высадки, и поэтому оператор М может быть освобожден. Оператор М может быть предварительно проинформирован о том, что транспортное средство V должно переместиться в положение, которое отличается от второго положения в качестве положения высадки, и поэтому оператор М может быть освобожден. После выхода из транспортного средства оператору M предоставляется информация о движении к назначенному положению, которая отображается на дисплее 53 несомого оператором M операционного терминала 5, и оператор M может достичь назначенного положения, не теряясь. Транспортное средство может автономно достигать второго положения в соответствии с инструкцией управления, и затем предоставляется руководящая информация; следовательно, оператор M может использовать устройство 100 управления парковкой с облегчением.
[0066] На этапе 114 дистанционное управление начинается оператором М, который вышел из транспортного средства. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения функционирует для исполнения процесса управления парковкой под дистанционным управлением для выполнения парковки посредством передачи команды установки целевого положения парковки, команды запуска процесса управления парковкой, команды прерывания/отмены и других соответствующих команд извне транспортному средству V, не требуя, чтобы оператор садился на транспортное средство V. Оператор М сошел с транспортного средства во втором положении, в котором работоспособность дистанционного управления относительно высока, и поэтому может выполнить дистанционное управление без перемещения со второго положения. Кроме того, работоспособность дистанционного управления высока во втором положении, поэтому оператор может выполнять операцию управления парковкой, наблюдая за окружающей обстановкой.
[0067] На этапе 115 управляющее устройство 10 периодически вычисляет первую зону (и/или вторую зону). Первая зона, не наблюдаемая из положения наблюдения, и вторая зона, наблюдаемая из положения наблюдения, изменяются по мере изменения положения препятствия и положения транспортного средства V. Чтобы реагировать на изменение ситуации, управляющее устройство 10 вычисляет первую зону (или вторую зону) в заданном цикле. На этапе 116 управляющее устройство 10 определяет, есть ли или нет изменение первой зоны или второй зоны. Когда изменение есть, взаимное пространственное расположение положения на маршруте парковки (включая положение поворота для парковки) и первой зоны также изменяется, и поэтому маршрут парковки вычисляется снова. Когда удается рассчитать новый подходящий маршрут парковки, используется этот новый маршрут парковки. Управляющее устройство 10 вычисляет инструкцию управления для нового маршрута парковки. На этапе 117 управляющее устройство 10 обновляет маршрут парковки и инструкцию управления, которые рассчитаны на этапе 109, для нового маршрута парковки и новой инструкции управления, соответствующей изменившимся со временем первой зоне и второй зоне. На этапе 116, когда нет изменений первой или второй зоны, необходимости вычислять новый маршрут парковки и новую инструкцию управления нет, поэтому процесс переходит к этапу 118.
[0068] На этапе 118 управляющее устройство 10 отслеживает изменение первой зоны и второй зоны, пока транспортное средство V не достигнет положения поворота для парковки. Когда транспортное средство V достигло положения поворота для парковки, на этапе 119 выполняется переключение передач, включенное в инструкцию управления. За этапом 119 следует этап 120, на котором управление парковкой завершается путем последовательного выполнения инструкций управления.
[0069] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения функционирует для управления работой системы 40 привода через контроллер 70 транспортного средства в соответствии с инструкцией управления, так что транспортное средство V движется по маршруту парковки. Устройство 100 управления парковкой функционирует для вычисления командных сигналов системе 40 привода транспортного средства V, такой как электродвигатель EPS, выдавая в качестве обратной связи выходное значение датчика 50 угла поворота руля устройства рулевого управления с тем, чтобы траектория движения транспортного средства V совпадала с рассчитанным маршрутом парковки, и передает командные сигналы системе 40 привода или контроллеру 70 транспортного средства, который управляет системой 40 привода.
[0070] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя блок управления для управления парковкой. Блок управления для управления парковкой получает информацию о диапазоне переключения передач от блока управления AT/CVT, информацию о скорости вращения колес от блока управления ABS, информацию об угле поворота руля от блока управления углом поворота руля, информацию о частоте вращения двигателя от ECM и другую необходимую информацию. На основе этих элементов информации блок управления для управления парковкой вычисляет и выводит информацию об инструкциях по автономному рулению на блок управления EPS, информацию об инструкциях, такую как предупреждение блоку управления счетчиком, и т. д. Управляющее устройство 10 получает элементы информации, которые получены датчиком 50 угла поворота руля устройства рулевого управления транспортного средства V, датчиком 60 скорости транспортного средства и другими датчиками транспортного средства V, через контроллер 70 транспортного средства.
[0071] Система 40 привода в соответствии с одним или более вариантами осуществления настоящего изобретения приводит транспортное средство V1 в движение (перемещение) из текущего положения в целевое положение парковки путем вождения на основе командных сигналов управления, полученных от устройства 100 управления парковкой. Устройство рулевого управления в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой приводной механизм, который перемещает транспортное средство V в направлениях вправо и влево. Электродвигатель EPS, входящий в состав системы 40 привода, приводит в действие механизм гидроусилителя руля устройства рулевого управления на основе командных сигналов управления, полученных от устройства 100 управления парковкой, для управления величиной поворота руля и управляет работой при движении транспортного средства V в целевое положение парковки. Содержание управления и схема работы для парковки транспортного средства V конкретно не ограничены, и может быть соответствующим образом применена любая схема, известная на момент подачи этой заявки.
[0072] Когда устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения работает, управляя транспортным средством V для перемещения в целевое положение парковки по маршруту, рассчитанному на основе положения транспортного средства V и местоположения целевого положения парковки, акселератор и тормоз управляются автономным образом на основе назначенной скорости управляемого транспортного средства (заданной скорости транспортного средства), а работа устройства рулевого управления управляет движением транспортного средства V автономным образом в соответствии со скоростью транспортного средства.
[0073] Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения используется в устройстве управления парковкой, как указано выше, и поэтому проявляет следующие эффекты. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения сконфигурировано и работает так, как указано выше, и поэтому проявляет следующие эффекты.
[0074] (1) Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя остановку транспортного средства V во втором положении, в котором работоспособность дистанционного управления является относительно высокой, и поэтому оператор M, который выходит из остановившегося транспортного средства V, может выполнить там удобное дистанционное управление. Оператору М не нужно перемещаться из второго положения, в котором оператор М покидает транспортное средство, чтобы искать место, в котором работоспособность сама по себе является высокой.
[0075] (2) Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя процесс выбора первого положения, в котором площадь первой зоны относительно мала, в качестве второго положения, и тем самым возможно улучшить работоспособность для оператора М, который дистанционно управляет транспортным средством V.
[0076] (3) Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя процесс выбора первого положения, в котором доля длины маршрута, принадлежащей первой зоне, от длины маршрута парковки является относительно низкой, в качестве второго положения, и тем самым возможно улучшить работоспособность для оператора M, который дистанционно управляет транспортным средством V.
[0077] (4) Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя процесс выбора первого положения, в котором доля транспортного средства V, принадлежащего второй зоне (наблюдаемой зоне) в положения поворота для парковки VR, является относительно высокой, в качестве второго положения, и тем самым возможно улучшить работоспособность для оператора М, который дистанционно управляет транспортным средством V. В частности, оператор М может легко воспринимать ситуацию транспортного средства V и его окружения в положении поворота для парковки VR и может легко выполнить эту операцию.
[0078] (5) Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя процесс выбора первого положения, в котором доля транспортного средства V, принадлежащего второй зоне (наблюдаемой зоне) в целевом положении VP парковки, является относительно высокой, в качестве второго положения, и тем самым возможно улучшить работоспособность для оператора M, который дистанционно управляет транспортным средством V. В частности, оператор М может легко воспринимать ситуацию транспортного средства V и его окружения в целевом положении VP парковки и может легко выполнить эту операцию.
[0079] (6) Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя процесс выбора первого положения, в котором доля площади присутствия препятствия OB, принадлежащей второй зоне (наблюдаемой зоне), является относительно высокой, в качестве второго положения, и тем самым возможно улучшить работоспособность для оператора M, который дистанционно управляет транспортным средством V1. В частности, оператор M может легко воспринимать взаимное пространственное расположение препятствия и транспортного средства V и может легко выполнять эту операцию.
[0080] (7) Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя процесс представления на дисплее 31 транспортного средства V руководящей информации о направлении к выбранному второму положению. Оператор M может быть предварительно проинформирован о том, что транспортное средство V перемещается в положение высадки, и поэтому оператор M может быть освобожден. Когда транспортное средство V прибывает в положение высадки, управляющее устройство 10 предлагает оператору М выйти из транспортного средства. Оператор М может выйти из транспортного средства во втором положении, в котором работоспособность дистанционного управления является высокой, как выбрано управляющим устройством 10.
[0081] (8) Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя процесс информирования о том, что транспортное средство должно перемещаться в положение, которое отличается от второго положения в качестве положения высадки, и поэтому оператор М может быть освобожден. После выхода из транспортного средства оператору M предоставляется информация о направлении в назначенное положение, которая отображается на дисплее 53 носимого оператором M операционного терминала 5, и оператор M может достичь назначенного положения, не теряясь. Транспортное средство может автономно достичь второго положения в соответствии с инструкцией управления, и затем представляется руководящая информация; следовательно, оператор M может использовать устройство 100 управления парковкой с облегчением.
[0082] (9) Также и в устройстве 100 управления парковкой, в котором исполняется способ в соответствии с одним или более вариантами осуществления настоящего изобретения, демонстрируются действия и эффекты, описанные в вышеприведенных пунктах (1) - (8).
[0083] Изложенные выше варианты осуществления описаны для облегчения понимания настоящего изобретения, а не для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все конструктивные изменения и эквиваленты, подпадающие под технический объем настоящего изобретения.
Описание ссылочных обозначений
[0084] 1000 Система управления парковкой
100 Устройство управления парковкой
10 Управляющее устройство
11 ЦП
12 ПЗУ
13 ОЗУ
132 Запоминающее устройство
133 Картографическая информация
134 Информация о стоянке
135 Информация о препятствиях
20 Устройство ввода
21 Устройство связи
211 Антенны
30 Устройство вывода
31 Дисплей
1a-1d Камеры
2 Дальномерные устройства
3 Информационный сервер
31 Устройство связи
32 Запоминающее устройство
33 Картографическая информация
34 Информация о стоянке
35 информация о препятствиях
5 Операционный терминал
51 Устройство связи
511 Антенна
52 Устройство ввода
53 Дисплей
200 Бортовое оборудование
40 Система привода
50 Датчик угла поворота руля
60 Датчик скорости транспортного средства
70 Контроллер транспортного средства
V, V1 Транспортное средство
BA Первая зона
VA Вторая зона
Реферат
Группа изобретений относится к способу управления парковкой для выполнения инструкции управления по перемещению транспортного средства (V) по маршруту парковки (RT) и устройство для осуществления этого способа. Этот способ включает в себя выбор второго положения с относительно высокой работоспособностью дистанционного управления из числа одного или более первых положений, в которых оператор (M) транспортного средства (V) может выйти из транспортного средства, остановить транспортное средство (V) во втором положении и обеспечить парковку транспортного средства в соответствии с инструкцией управления на основании рабочей команды, полученной от оператора (M), который вышел из транспортного средства (V). Обеспечивается удобство и безопасность парковки транспортного средства оператором. 2 н. и 7 з.п. ф-лы, 14 ил.
Комментарии