Способ и устройство для управления беспилотным летательным аппаратом - RU2728929C1
Код документа: RU2728929C1
Чертежи



Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к беспилотным летательным аппаратам (БПЛА) и более конкретно к способу управления БПЛА и к устройству управления БПЛА.
Уровень техники
БПЛА представляет собой летательный аппарат, на котором нет людей-пилотов. БПЛА широко используются в сфере защиты растений, в управлении городским хозяйством, в геологии, в метеорологии, в электроэнергетике, для помощи при стихийных бедствиях, для видеосъемки и в других отраслях.
В ходе развития технологии БПЛА для защиты растений удалось добиться таких характеристик защиты растений с применением БПЛА, как минимальный ущерб для сельскохозяйственных культур и высокая степень использования пестицидов. Все больше и больше крестьянских хозяйств или фермеров используют БПЛА для операций по защите растений, и в частности используют БПЛА для опрыскивания пестицидами и для внесения удобрений путем опрыскивания.
Существующие способы использования БПЛА для защиты сельскохозяйственных культур в общем случае предназначены для обработки плантаций большой площади, на которых растут культуры небольшого размера и посаженные с высокой плотностью. Эти культуры обычно сажают на плоских открытых сельскохозяйственных угодьях, так что все обрабатываемые площади могут быть охвачены опрыскиванием в режиме сканирования полоса за полосой с заданным шагом между полосами, осуществляемым посредством БПЛА, причем дозировкой опрыскивания управляют для достижения прецизионности опрыскивания.
Для сельскохозяйственных культур фруктового типа, из-за различий топографии роста и разной высоты деревьев рабочая среда оказывается усложнена. Поэтому, для сельскохозяйственных культур фруктового типа в режиме защиты растений с помощью БПЛА обычно применяется ручное и дистанционное управление БПЛА для опрыскивания растений пестицидами.
Однако режим ручного и дистанционного управления БПЛА для опрыскивания сельскохозяйственных культур пестицидами имеет следующие недостатки:
Во-первых, поскольку режим ручного и дистанционного управления БПЛА для опрыскивания фруктовых деревьев требует полного участия оператора, затраты на рабочую силу высоки.
Во-вторых, при обработке фруктовых деревьев обычно возможны ситуации, когда эти деревья закрывают обзор для человека, что увеличивает трудности для операторов при управлении БПЛА и приводит к увеличению числа ошибок ручного управления и пропускам опрыскивания некоторых фруктовых деревьев и даже к летным происшествиям.
В-третьих, трудно управлять дозой опрыскивания при ручном управлении распылением пестицидов, так что эффект прецизионного опрыскивания не достигается.
Раскрытие изобретения
В свете описанных выше проблем, были разработаны варианты настоящего изобретения для создания способа управления БПЛА и соответствующего устройства управления БПЛА с целью полного преодоления описанных выше проблем или по меньшей мере частичного решения этих проблем.
Для решения приведенной выше проблемы, варианты настоящего изобретения описывают способ управления БПЛА. Этот способ управления БПЛА содержит: получение картографической информации относительно обрабатываемого объекта, где эта картографическая информация содержит указание безопасной высоты, информацию о географическом положении и указание радиуса опрыскивания для обрабатываемого объекта; регулирование высоты полета БПЛА для выхода на безопасную высоту, и полет, в соответствии с этой безопасной высотой, в пункт, соответствующий информации о географическом положении; и осуществление, в этом пункте, соответствующем информации о географическом положении, опрыскивания обрабатываемого объекта по спиральной траектории на основе радиуса опрыскивания.
В качестве по меньшей мере одного из альтернативных вариантов, когда имеются несколько обрабатываемых объектов, способ дополнительно содержит: после завершения работы с текущим обрабатываемым объектом, считывание картографической информации относительно следующего обрабатываемого объекта, и оценку, является ли безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта; когда результат оценки показывает, что безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта, регулирование, в пункте нахождения текущего обрабатываемого объекта, высоты полета БПЛА к безопасной высоте для следующего обрабатываемого объекта, перелет, в соответствии с отрегулированной безопасной высотой, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, и осуществление, в пункте, соответствующем информации о географическом положении следующего обрабатываемого объекта, опрыскивания по спиральной траектории следующего обрабатываемого объекта на основе радиуса опрыскивания для следующего обрабатываемого объекта; и когда результат оценки показывает, что безопасная высота для следующего обрабатываемого объекта не больше безопасной высоты для текущего обрабатываемого объекта, перелет, в соответствии с безопасной высотой, соответствующей текущему обрабатываемому объекту, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, по достижению пункта, соответствующего информации о географическом положении следующего обрабатываемого объекта, регулирование безопасной высоты к безопасной высоте для следующего обрабатываемого объекта, и осуществление, на основе отрегулированной безопасной высоты, опрыскивания следующего обрабатываемого объекта по спиральной траектории в соответствии с радиусом опрыскивания для следующего обрабатываемого объекта.
В качестве по меньшей мере одного из альтернативных вариантов, способ дополнительно содержит: получение информации о стартовом пункте, где БПЛА взлетает, и об абсолютной высоте над уровнем моря, соответствующей этому стартовому пункту; после завершения текущей операции перелета БПЛА, регулирование высоты полета БПЛА к высоте возврата, эту высоту возврата получают путем увеличения абсолютной высоты над уровнем моря БПЛА на заданную величину перепада высот; перелет в стартовый пункт в соответствии с высотой возврата и приземление в этом стартовом пункте.
В качестве по меньшей мере одного из альтернативных вариантов, картографическая информация дополнительно содержит указание высоты над уровнем моря обрабатываемого объекта и физической высоты обрабатываемого объекта, а безопасная высота не меньше суммы высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания.
В качестве по меньшей мере одного из альтернативных вариантов, если безопасная высота больше суммы высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания, и прежде осуществления, в пункте, соответствующем информации о географическом положении, опрыскивания обрабатываемого объекта по спиральной траектории на основе радиуса опрыскивания, способ дополнительно содержит: если БПЛА оснащен высотомером для измерения высоты над уровнем земли, снижение, в пункте, соответствующем информации о географическом положении, с высоты полета БПЛА до высоты, соответствующей сумме высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания.
В качестве по меньшей мере одного из альтернативных вариантов, процедура осуществления, в пункте, соответствующем информации о географическом положении, опрыскивания обрабатываемого объекта по спиральной траектории на основе радиуса опрыскивания содержит: определение рабочих параметров, необходимых для опрыскивания по спиральной траектории, совокупность этих рабочих параметров содержит радиус первоначального витка, число витков, шаг и угловую скорость в полете по спирали, где радиус первоначального витка не больше радиуса опрыскивания; и использование информации о географическом положении обрабатываемого объекта в качестве указания центра спирали, начало полета вокруг центра спирали с радиуса первоначального витка, увеличение радиуса на величину соответствующего шага с каждым оборотом, завершение опрыскивания обрабатываемого объекта, когда будет удовлетворено требование числа витков и/или будет достигнут радиус опрыскивания, в процессе полета, поворот корпуса в соответствии с угловой скоростью в полете по спирали.
В качестве по меньшей мере одного из альтернативных вариантов, обрабатываемый объект имеет по меньшей мере следующие атрибуты: разница физических высот между обрабатываемыми объектами или разница между диаметрами описанных окружностей, в ортогональных проекциях, между обрабатываемыми объектами не меньше заданной пороговой величины.
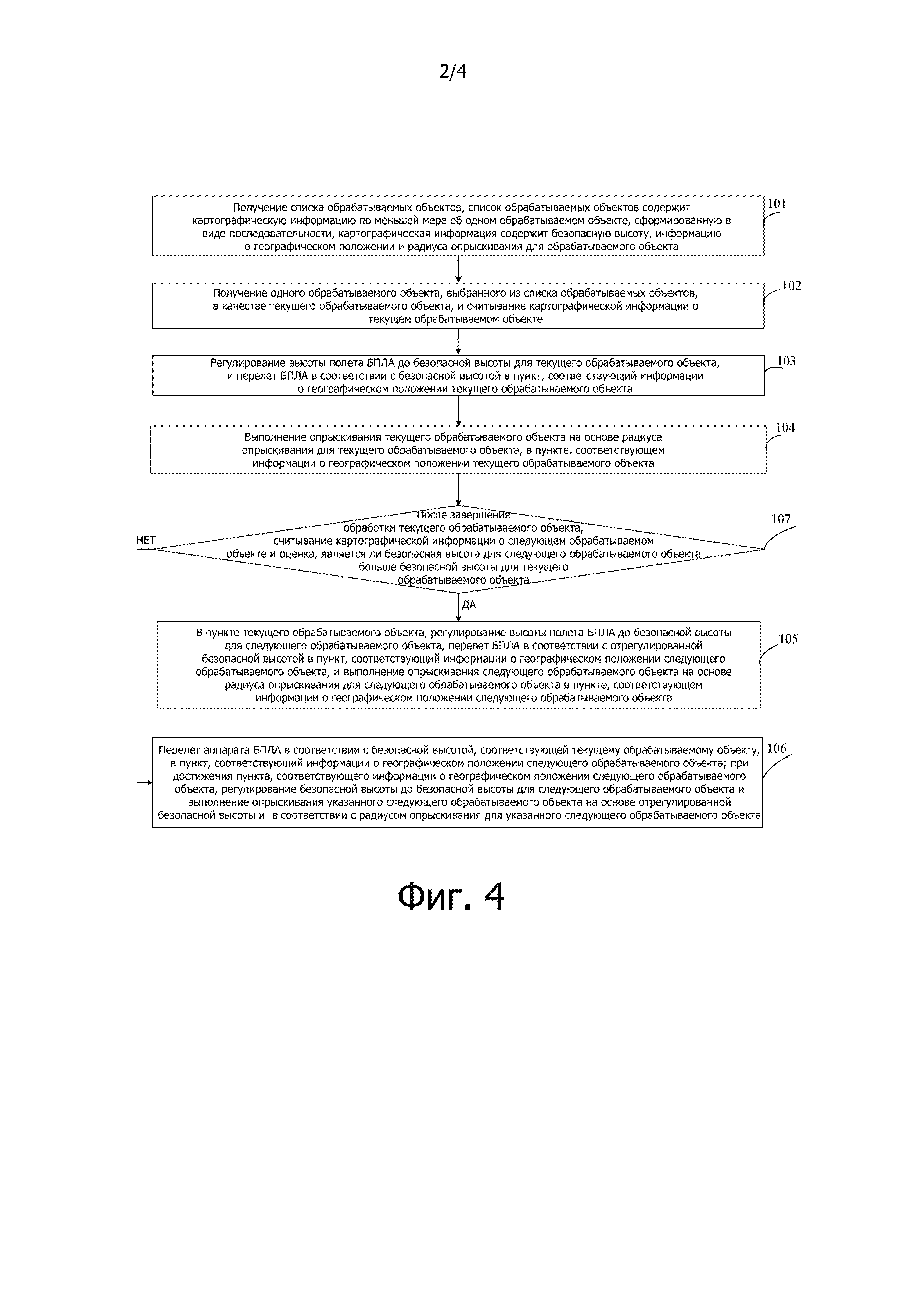
Варианты настоящего изобретения описывают способ управления беспилотным летательным аппаратом (БПЛА), содержащий: получение списка обрабатываемых объектов, подлежащих обработке, этот список обрабатываемых объектов содержит картографическую информацию по меньшей мере об одном обрабатываемом объекте, организованную в последовательности, а картографическая информация содержит указание безопасной высоты, информацию о географическом положении и указание радиуса опрыскивания, относительно обрабатываемого объекта; получение одного обрабатываемого объекта, выбранного из списка обрабатываемых объектов в качестве текущего обрабатываемого объекта, и считывание картографической информации относительно текущего обрабатываемого объекта; регулирование высоты полета БПЛА к безопасной высоте текущего обрабатываемого объекта, и перелет, в соответствии с безопасной высотой, в пункт, соответствующий информации о географическом положении текущего обрабатываемого объекта; осуществление, в пункте, соответствующем информации о географическом положении текущего обрабатываемого объекта, процедуры опрыскивания текущего обрабатываемого объекта на основе радиуса опрыскивания текущего обрабатываемого объекта; после завершение обработки в отношении текущего обрабатываемого объекта, считывание картографической информации относительно следующего обрабатываемого объекта, и проверку, является ли безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта; если результат оценки указывает, что безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта, регулирование, в пункте нахождения текущего обрабатываемого объекта, высоты полета БПЛА к безопасной высоте для следующего обрабатываемого объекта, перелет, в соответствии с отрегулированной безопасной высотой, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, и осуществление, в пункте, соответствующем информации о географическом положении следующего обрабатываемого объекта, процедуры опрыскивания для следующего обрабатываемого объекта на основе радиуса опрыскивания для следующего обрабатываемого объекта; а если результат оценки указывает, что безопасная высота для следующего обрабатываемого объекта не больше безопасной высоты для текущего обрабатываемого объекта, перелет, в соответствии с безопасной высотой, соответствующей текущему обрабатываемому объекту, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, после достижения пункта, соответствующего информации о географическом положении следующего обрабатываемого объекта, регулирование безопасной высоты к безопасной высоте для следующего обрабатываемого объекта, и осуществление, на основе отрегулированной безопасной высоты, процедуры опрыскивания следующего обрабатываемого объекта в соответствии с радиусом опрыскивания следующего обрабатываемого объекта.
В качестве по меньшей мере одного из альтернативных вариантов, способ дополнительно содержит: получение указаний стартового пункта, где БПЛА взлетает, и абсолютной высоты над уровнем моря, соответствующей стартовому пункту; после завершения обработки всех обрабатываемых объектов из списка обрабатываемых объектов, регулирование высоты полета БПЛА к высоте возврата, эту высоту возврата получают путем увеличения абсолютной высоты над уровнем моря БПЛА на заданную величину перепада высот; и перелет к стартовому пункту в соответствии с высотой возврата, и посадку в стартовом пункте.
В качестве по меньшей мере одного из альтернативных вариантов, картографическая информация дополнительно содержит указание высоты над уровнем моря обрабатываемого объекта и физической высоты обрабатываемого объекта, и указанная безопасная высота не меньше суммы высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания.
В качестве по меньшей мере одного из альтернативных вариантов, если безопасная высота для некоторого обрабатываемого объекта не меньше суммы высоты над уровнем моря этого обрабатываемого объекта, физической высоты этого обрабатываемого объекта и заданной высоты опрыскивания, способ дополнительно содержит: когда обрабатываемый объект оснащен высотомером для измерения высоты над уровнем земли, снижение, в пункте, соответствующем информации о географическом положении обрабатываемого объекта, высоты полета БПЛА до высоты, соответствующий сумме высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания прежде осуществления процедуры опрыскивания этого обрабатываемого объекта.
В качестве по меньшей мере одного из альтернативных вариантов, процедура опрыскивания содержит опрыскивание по спиральной траектории, а эта процедура опрыскивания по спиральной траектории содержит: определение рабочих параметров, требуемых для опрыскивания по спиральной траектории, совокупность этих рабочих параметров содержит радиус первоначального витка, число витков, шаг и угловую скорость в полете по спирали, где радиус первоначального витка не больше радиуса опрыскивания; и использование информации о географическом положении обрабатываемого объекта в качестве указания центра спирали, начало полета вокруг центра спирали с радиуса первоначального витка, увеличение радиуса на соответствующую величину шага на каждом обороте, завершение обработки соответствующего обрабатываемого объекта, когда удовлетворяется число витков и/или достигнут радиус опрыскивания, и в процессе полета, поворот корпуса в соответствии с угловой скоростью в полете по спирали.
В качестве по меньшей мере одного из альтернативных вариантов, обрабатываемый объект имеет по меньшей мере следующие атрибуты: разница физических высот между обрабатываемыми объектами или разница между диаметрами описанных окружностей, в ортогональных проекциях, между обрабатываемыми объектами не меньше заданной пороговой величины.
Варианты настоящего изобретения описывают устройство управления беспилотным летательным аппаратом (БПЛА), содержащее: компонент для получения картографической информации, конфигурированный для приема картографической информации относительно обрабатываемого объекта, который нужно обработать, эта картографическая информация содержит указание безопасной высоты, информацию о географическом положении и указание радиуса опрыскивания для обрабатываемого объекта; первый компонент для регулирования безопасной высоты, конфигурированный для регулирования высоты полета БПЛА к безопасной высоте; первый полетный компонент, конфигурированный для полета, в соответствии с безопасной высотой, в пункт, соответствующий информации о географическом положении; и компонент для опрыскивания по спиральной траектории, конфигурированный для осуществления, в пункте, соответствующем информации о географическом положении, опрыскивания обрабатываемого объекта по спиральной траектории на основе радиуса опрыскивания.
Варианты настоящего изобретения описывают устройство управления беспилотным летательным аппаратом (БПЛА), содержащее: компонент для получения списка обрабатываемых объектов, конфигурированный для приема списка обрабатываемых объектов, которые необходимо обработать, этот список обрабатываемых объектов содержит картографическую информацию относительно по меньшей мере одного обрабатываемого объекта, организованную в последовательности, эта картографическая информация содержит указание безопасной высоты, информацию о географическом положении и указание радиуса опрыскивания, относительно обрабатываемого объекта; компонент для считывания картографической информации, конфигурированный для получения одного обрабатываемого объекта, выбранного из списка обрабатываемых объектов, в качестве текущего обрабатываемого объекта и считывания картографической информации относительно текущего обрабатываемого объекта; второй компонент для регулирования безопасной высоты, конфигурированный для регулирования высоты полета БПЛА к безопасной высоте для текущего обрабатываемого объекта; второй полетный компонент, конфигурированный для перелета, в соответствии с безопасной высотой, в пункт, соответствующий информации о географическом положении текущего обрабатываемого объекта; опрыскивающий компонент, конфигурированный для осуществления, в пункте, соответствующем информации о географическом положении текущего обрабатываемого объекта, процедуры опрыскивания текущего обрабатываемого объекта на основе радиуса опрыскивания для этого текущего обрабатываемого объекта; оценивающий компонент, конфигурированный для считывания, после завершения обработки текущего обрабатываемого объекта, картографической информации относительно следующего обрабатываемого объекта, оценки, является ли безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта, если в результате оценки определено, что безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта, вызов первого компонента для регулирования высоты, и если в результате оценки определено, что безопасная высота для следующего обрабатываемого объекта не больше безопасной высоты для текущего обрабатываемого объекта, вызов второго компонента для регулирования высоты; первый компонент для регулирования высоты конфигурирован для регулирования, в пункте нахождения текущего обрабатываемого объекта, высоты полета БПЛА к безопасной высоте для следующего обрабатываемого объекта, вызов второго полетного компонента для перелета, в соответствии с отрегулированной безопасной высотой, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, и вызов опрыскивающего компонента для осуществления, в пункте, соответствующем информации о географическом положении следующего обрабатываемого объекта, процедуры опрыскивания следующего обрабатываемого объекта на основе радиуса опрыскивания для этого следующего обрабатываемого объекта; и второй компонент для регулирования высоты, конфигурированный для перелета, в соответствии с безопасной высотой, соответствующей текущего обрабатываемого объекта, в пункт, соответствующий информации о географическом положении этого следующего обрабатываемого объекта, регулирования безопасной высоты к безопасной высоте для следующего обрабатываемого объекта после достижения пункта, соответствующего информации о географическом положении следующего обрабатываемого объекта, и вызова опрыскивающего компонента для осуществления, на основе отрегулированной безопасной высоты, процедуры опрыскивания следующего обрабатываемого объекта в соответствии с радиусом опрыскивания для следующего обрабатываемого объекта.
Варианты настоящего изобретения обладают следующими преимуществами:
Варианты настоящего изобретения могут быть применены к процедурам защиты растений с помощью БПЛА в сложной рабочей среде, где топография роста сельскохозяйственных структур не является плоской и не является открытой, либо физические высоты и физическая ширина растущих сельскохозяйственных культур оказываются несогласованными. В результате отображения и нанесения на карту заранее географической информации для каждой сельскохозяйственной культуры БПЛА автономно осуществляет перелет к каждой сельскохозяйственной культуре (или единице этой культуры) для осуществления полета по спирали с непрерывной трассой полета, осуществляет сплошное опрыскивание каждой сельскохозяйственной культуры и точно управляет дозой в соответствии с состоянием спирали для достижения эффекта прецизионного опрыскивания.
Более того, варианты настоящего изобретения не требуют полного ручного участия, сберегая тем самым затраты на рабочую силу, повышая эффективность опрыскивания и уменьшая вероятность ошибок, обусловленных ручным опрыскиванием, вероятность пропусков опрыскивания и вероятность повторного опрыскивания.
Краткое описание чертежей
Прилагаемые чертежи используются для более глубокого понимания настоящего изобретения и составляют часть настоящей заявки, а примеры вариантов осуществления настоящего изобретения и их описание используются для пояснения настоящего изобретения, но не накладывают неправомерных ограничений на изобретение. На чертежах:
Фиг. 1 представляет логическую схему способа управления БПЛА в соответствии с первым вариантом способа согласно настоящему изобретению;
Фиг. 2 представляет упрощенную схему высоты опрыскивания обрабатываемого объекта применительно к способу управления аппаратом в соответствии с первым вариантом способа согласно настоящему изобретению;
Фиг. 3 представляет упрощенную схему спиральной траектории опрыскивания при использовании способа управления БПЛА в соответствии с первым вариантом способа согласно настоящему изобретению;
Фиг. 4 представляет логическую схему способа управления БПЛА в соответствии со вторым вариантом осуществления способа согласно настоящему изобретению;
Фиг. 5 представляет структурную блок-схему устройства управления БПЛА в соответствии с первым вариантом устройства согласно настоящему изобретению; и
Фиг. 6 представляет структурную блок-схему устройства управления БПЛА в соответствии со вторым вариантом устройства согласно настоящему изобретению.
Осуществление изобретения
Для того чтобы сделать указанные выше цели, признаки и преимущества настоящего изобретения более явными и понятными, настоящее изобретение далее описано более подробно ниже со ссылками на чертежи и конкретные варианты осуществления изобретения.
На Фиг. 1 представлена логическая схема способа управления БПЛА в соответствии с первым вариантом способа согласно настоящему изобретению.
По меньшей мере в одном из альтернативных вариантов, система управления полетом (называемая также полетным контроллером) может управлять БПЛА для выполнения всех этапов процесса полета, таких как взлет, полет в воздухе, выполнение задания и обратный полет. Роль полетного контроллера для БПЛА эквивалентна роли пилота в пилотируемом летательном аппарате. Это одна из базовых технологий для БПЛА.
Связь с БПЛА может осуществлять наземная станция. В варианте реализации эта наземная станция может представлять собой портативную наземную станцию, которая может быть оснащена системой глобального определения местоположения (GPS) высокой точности для поддержки быстрого отображения и картирования нерегулярных границ блоков. При использовании такой наземной станции нет необходимости подключать компьютер, так что параметры полета БПЛА можно регулировать напрямую. Наземная станция имеет интеллектуальную функцию планирования маршрута и поддерживает заданное переключение пункта опрыскивания, так что можно эффективно избегать повторного опрыскивания или пропусков при опрыскивании во время работы системы. В процессе опрыскивания пользователь может также осуществлять мониторинг состояния полета и опрыскивания в реальном времени через свою наземную станцию, что делает опрыскивание более точным и эффективным.
Варианты осуществления настоящего изобретения относятся к стороне БПЛА, а способ в качестве по меньшей мере одного из альтернативных вариантов может содержать следующие этапы.
На этапе 101, получают картографическую информацию об обрабатываемом объекте.
По меньшей мере в одном из альтернативных вариантов, могут быть один или несколько обрабатываемых объектов, которые нужно обработать, может быть получен список этих обрабатываемых объектов, причем список обрабатываемых объектов может содержать картографическую информацию о каждом обрабатываемом объекте.
Варианты осуществления настоящего изобретения могут быть применены к операциям по защите растений на неровном и/или не открытом грунте. Обрабатываемый объект может иметь по меньшей мере следующие атрибуты: разность физических высот между обрабатываемыми объектами или разность между диаметрами описанных окружностей, в ортогональных проекциях, между обрабатываемыми объектами не меньше заданной пороговой величины.
В качестве примера, обрабатываемый объект может содержать, без ограничений, плодовые культуры.
Плодовые культуры могут расти в условиях различной топографии (рельефа), и физическая высота (расстояние между уровнем поверхности и вершиной дерева) деревьев и физическая ширина (диаметр окружности, описанной вокруг дерева в плоскости вертикальной проекции этого дерева, или ширина по контуру самых дальних от центра листьев) деревьев сильно различаются.
В качестве предпочтительного примера осуществления настоящего изобретения, картографическая информация может содержать, не ограничиваясь этим: высоту над уровнем моря, физическую высоту, физическую ширину, безопасную высоту, информацию о географическом положении и радиус опрыскивания для обрабатываемого объекта.
В качестве по меньшей мере одного альтернативного варианта «безопасная высота» обозначает высоту безопасного и беспрепятственного полета БПЛА. Такая безопасная высота может быть больше или равна сумме высоты обрабатываемого объекта над уровнем моря и физической высоты обрабатываемого объекта и заданной высоты опрыскивания.
В качестве по меньшей мере одного альтернативного варианта, высоту обрабатываемого объекта над уровнем моря и физическую высоту обрабатываемого объекта получают из результатов измерений.
Высота секции опрыскивания обозначает высоту, с которой БПЛА осуществляет распыление главным образом вершин деревьев, иными словами, высота с которой достигается наилучший эффект опрыскивания, когда расстояние между БПЛА и вершиной обрабатываемого объекта составляет h метров. Эта величина может быть заранее задана оператором или проектировщиком на основе опыта. Например, эта величина может быть задана равной 1 м, что означает, что наилучший эффект опрыскивания достигается, когда расстояние между БПЛА и вершиной обрабатываемого объекта составляет 1 м.
Следует отметить, что высота плоскости опрыскивания для каждого обрабатываемого объекта может быть одинаковой, либо может быть установлена в соответствии с атрибутами роста и условиями роста обрабатываемого объекта, что не ограничивается в вариантах осуществления настоящего изобретения.
Например, как показано на упрощенной схеме высоты опрыскивания обрабатываемого объекта, показанной на Фиг. 2, в предположении, что полученная высота над уровнем моря дерева равна H, физическая высота равна h1 и заданная высота плоскости опрыскивания равна h, безопасная высота может быть не меньше H+h1+h.
На практике, если БПЛА имеет высотомер для измерения высоты над уровнем земли, то поскольку высоту деревьев трудно измерить точно, безопасная высота может быть установлена больше H+h1+h.
Под «высотомером для измерения высоты над уровнем земли» понимают измерительный прибор, определяющий расстояние между БПЛА и объектом, находящимся ниже БПЛА, так что этот высотомер может содержать ультразвуковой локатор, радиолокатор, измеритель времени пролета (Time of Flight (TOF)), лазерный локатор или т.п.
Информация о географическом положении может представлять собой указание широты и долготы центрального пункта обрабатываемого объекта. Например, когда обрабатываемый объект представляет собой фруктовое дерево, центральным пунктом обрабатываемого объекта может быть ствол дерева или центр окружности, описанной вокруг дерева в плоскости вертикальной проекции, а радиус опрыскивания может представлять собой расстояние между самыми наружными листьями и стволом дерева или радиус указанной выше описанной окружности, и в ходе выполнения опрыскивания, необходимо опрыскивать область в пределах радиуса опрыскивания.
На практике, когда БПЛА получает список обрабатываемых объектов, если этот список обрабатываемых объектов представлен на дисплее, обрабатываемые объекты можно расположить и пронумеровать, согласно соответствующей информации о географическом положении, номера обрабатываемых объектов наносят на карту вертикальной проекции для рабочего задания, так что оператор может выбирать обрабатываемый объект, который будет обрабатываться в текущий момент, по мере необходимости.
Обрабатываемые объекты могут быть пронумерованы в порядке нанесения на карту или сканированы и расположены в некотором направлении, например в северном направлении. В случае защиты растений на склоне холма они могут быть распределены по уровням от нижнего к верхнему.
По меньшей мере в одном альтернативном варианте БПЛА может получить картографическую информацию об обрабатываемом объекте от наземной станции по каналу передачи данных, причем на наземной станции эта картографическая информация может быть получена с использованием картографического устройства или аэрофотосъемки. Например, оператор может с высокой точностью нанести на карту, посредством картографического устройства, каждое фруктовое дерево в саду, который нужно обрабатывать пестицидами, для получения соответствующей картографической информации, и затем передать эту картографическую информацию на сервер. Сервер передает картографическую информацию в портативную наземную станцию через сеть связи. Затем наземная станция передает картографическую информацию полетному контроллеру БПЛА.
На этапе 102, высоту полета БПЛА регулируют до безопасной высоты, и затем этот БПЛА летит в пункт, соответствующий информации о географическом положении, в соответствии с безопасной высотой.
После того как БПЛА получает картографическую информацию об обрабатываемом объекте на основе этой картографической информации можно определить безопасную высоту для обрабатываемого объекта, который нужно обрабатывать в текущий момент. Когда БПЛА стартовал, высоту полета БПЛА можно отрегулировать до безопасной высоты, и затем БПЛА летит, с заданной скоростью в соответствии с безопасной высотой в пункт, обозначенный информацией о географическом положении обрабатываемого объекта.
По меньшей мере в одном альтернативном варианте, когда БПЛА получает список обрабатываемых объектов, из списка обрабатываемых объектов может быть выбран обрабатываемый объект наивысшего ранга в качестве обрабатываемого объекта, который нужно обработать в текущий момент, и затем БПЛА перелетает к каждому обрабатываемому объекту в последовательности для обработки.
Следует отметить, что при запуске БПЛА, картографическое устройство с устройством GPS высокой точности в БПЛА может также автоматически зарегистрировать стартовый пункт БПЛА в момент взлета (такие данные, как широта и долгота точки взлета) и абсолютную высоту над уровнем моря, соответствующую стартовому пункту.
На этапе 103, опрыскивание обрабатываемого объекта по спиральной траектории осуществляется в пункте, соответствующем информации о географическом положении, на основе радиуса опрыскивания.
Когда БПЛА достигнет пункта, соответствующего информации о географическом положении текущего обрабатываемого объекта, прежде осуществления этапа 103, вариант осуществления настоящего изобретения может дополнительно содержать следующий этап.
Когда БПЛА оснащен высотомером для измерения высоты над уровнем земли, высоту полета этого БПЛА снижают, в пункте, соответствующем информации о географическом положении, до высоты, соответствующей сумме высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты плоскости опрыскивания.
В качестве по меньшей мере одного альтернативного варианта, когда БПЛА достигнет пункта, соответствующего информации о географическом положении для текущего обрабатываемого объекта, перед осуществлением этапа 103, можно сначала определить высоту опрыскивания. Когда БПЛА оснащен высотомером для измерения высоты над уровнем земли, высота опрыскивания может представлять собой сумму высоты над уровнем моря текущего обрабатываемого объекта, физической высоты текущего обрабатываемого объекта и заданной высоты плоскости опрыскивания. В это время, когда безопасная высота БПЛА больше высоты опрыскивания, высоту полета БПЛА можно снизить до высоты опрыскивания.
Соответственно, когда БПЛА не имеет высотомера для измерения высоты над уровнем земли, безопасная высота может быть непосредственно взята в качестве высоты опрыскивания.
После определения высоты опрыскивания можно осуществить опрыскивание по спиральной траектории в пункте, соответствующем информации о географическом положении текущего обрабатываемого объекта, текущего обрабатываемого объекта на основе высоты опрыскивания согласно радиусу опрыскивания, измеренному, как указано выше.
В одном из примеров вариантов осуществления настоящего изобретения этап 103 может содержать следующие подэтапы.
На подэтапе S11, определяют рабочие параметры, необходимые для опрыскивания по спиральной траектории, рабочие параметры включают радиус первоначального витка, число витков, шаг и угловую скорость в полете по спирали, при этом радиус первоначального витка меньше или равен радиусу опрыскивания.
На подэтапе S12 информация о географическом положении обрабатываемого объекта принимается в качестве центра спирали, БПЛА начинает полет по спирали вокруг центра с радиуса первоначального витка, радиус увеличивают на величину соответствующего шага с каждым оборотом, обработку обрабатываемого объекта завершают, когда будет удовлетворено требование по числу витков и/или будет достигнут радиус опрыскивания, и во время полета корпус аппарата поворачивается в соответствии с угловой скоростью в полете по спирали.
В качестве по меньшей мере одного альтернативного варианта, обратившись к упрощенной схеме спиральной траектории опрыскивания, представленной на Фиг. 3, в процессе опрыскивания по спиральной траектории, БПЛА может лететь по траектории в форме спирали Архимеда. Спираль Архимеда (также известная как спираль с постоянной скоростью) представляет собой траекторию, генерируемую посредством перемещения точки из фиксированной точки с постоянной скоростью, в процессе поворота вокруг указанной фиксированной точки с фиксированной угловой скоростью.
Перед осуществлением полета по спирали сначала могут быть определены рабочие параметры, необходимые для опрыскивания по спиральной траектории. В качестве одного из примеров, совокупность рабочих параметров может содержать, не ограничиваясь этим, радиус r первоначального витка, число n витков, шаг d, угловую скорость в полете по спирали, угловую скорость поворота, скорость полета по спирали, радиус R опрыскивания текущего обрабатываемого объекта и т.п.
Радиус r первоначального витка может быть задан в соответствии с моделью БПЛА, размером корпуса аппарата, позицией сопла и/или актуальными экспериментальными данными. Например, если БПЛА представляет собой четырехвинтовую модель шириной 1,5 м, радиус r может быть установлен примерно 0,75 м.
Число витков и скорость по спирали могут быть установлены в соответствии с актуальной дозой опрыскивания текущего обрабатываемого объекта. Например, если дерево нужно опрыскать примерно 1 л пестицида и за один виток распыляют 0,3 л пестицида, число витков может быть равно 3.
Под шагом d понимают величину, на которую увеличивается радиус на каждом обороте, так что шаг составляет d=(R-r)/n.
Угловая скорость полета по спирали представляет собой угловую скорость, с которой центр БПЛА движется вокруг центра обрабатываемого объекта. Например, полет по одному витку спирали занимает 5 с, тогда угловая скорость полета по спирали составляет 360/5=75 градус/с. Эта величина может быть искусственно задана заранее или фиксированно установлена полетным контроллером.
Угловая скорость поворота представляет собой угловую скорость поворота воздушного судна вокруг центра этого воздушного судна. Величиной этой скорости управляет полетный контроллер. Результат управления может состоять, например, в том, что нос или крыло всегда указывает на центр поворота (движения по спирали) в процессе этого поворота.
Следует отметить, что в показанной на Фиг. 3 спирали, раскручивающейся изнутри наружу, радиус r первоначального витка меньше радиуса R опрыскивания.
На Фиг. 3, информация о географическом положении обрабатываемого объекта принята в качестве центра спирали, БПЛА начинает полет по спирали от центра к наружному кольцу изнутри наружу с радиусом первоначального витка, радиус спирали становится все больше и больше, увеличиваясь на одну и ту же величину шага с каждым оборотом, и опрыскивание завершается, когда радиус спиральной траектории БПЛА станет больше радиуса R опрыскивания.
Во время полета по спирали корпус также может поворачиваться, так что угловая скорость поворота и угловая скорость полета по спирали являются одинаковыми, вследствие чего может быть образован угол фиксированной величины между направлением, куда указывает нос, и направлением на центр БПЛА относительно центра спирали.
Следует отметить, что варианты настоящего изобретения не ограничиваются указанной выше спиралью, раскручивающейся изнутри наружу, так что спираль может представлять собой спираль, закручивающуюся снаружи внутрь, в результате чего радиус первоначального витка равен радиусу опрыскивания, а радиус спирали становится все меньше и меньше.
На практике, если радиус R опрыскивания меньше диапазона опрыскивания воздушного судна, это воздушное судно может осуществлять опрыскивание, поворачиваясь на месте, без полета по трассе, имеющей форму спирали Архимеда l.
В предпочтительном варианте настоящего изобретения, если имеются несколько обрабатываемых объектов, после завершения обработки текущего обрабатываемого объекта рассматриваемый вариант настоящего изобретения может далее содержать следующие этапы.
Система считывает картографическую информацию относительно следующего обрабатываемого объекта и оценивает, является ли безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта. Если это так, высоту полета БПЛА регулируют в пункте нахождения текущего обрабатываемого объекта к безопасной высоте для следующего обрабатываемого объекта, БПЛА совершает перелет к пункту, соответствующему информации о географическом положении следующего обрабатываемого объекта, в соответствии с отрегулированной безопасной высотой, и осуществляет опрыскивание следующего обрабатываемого объекта по спиральной траектории в пункте, соответствующем информации о географическом положении этого следующего обрабатываемого объекта, на основе радиуса опрыскивания для следующего обрабатываемого объекта. Если это не так, БПЛА совершает перелет в соответствии с безопасной высотой, соответствующей текущему обрабатываемому объекту, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, после достижения пункта, соответствующего информации о географическом положении следующего обрабатываемого объекта, безопасную высоту регулируют к безопасной высоте для следующего обрабатываемого объекта, и осуществляет опрыскивание следующего обрабатываемого объекта по спиральной траектории на основе отрегулированной безопасной высоты в соответствии с радиусом опрыскивания для следующего обрабатываемого объекта.
В качестве по меньшей мере одного из альтернативных вариантов, поскольку физическая высота каждого обрабатываемого объекта не согласована с высотами других объектов, после завершения обработки текущего обрабатываемого объекта может быть произведено считывание картографической информации относительно следующего обрабатываемого объекта, расположенного за текущим обрабатываемым объектом, далее извлекают величину безопасной высоты для следующего обрабатываемого объекта из прочитанной картографической информации, оценивают, является ли безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта, если это так, увеличивают высоту полета БПЛА в пункте нахождения текущего обрабатываемого объекта до безопасной высоты для следующего обрабатываемого объекта (если имеется высотомер для измерения высоты над уровнем земли, БПЛА летит к безопасной высоте для текущего обрабатываемого объекта и затем летит к безопасной высоте для следующего обрабатываемого объекта от безопасной высоте для текущего обрабатываемого объекта), далее БПЛА летит, в соответствии с отрегулированной безопасной высотой, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, и осуществляет опрыскивание следующего обрабатываемого объекта по спиральной траектории в пункте, соответствующем информации о географическом положении следующего обрабатываемого объекта, на основе радиуса опрыскивания следующего обрабатываемого объекта с учетом способа, описываемого на этапе 103.
Например, на Фиг. 2, безопасная высота для левого дерева меньше безопасной высоты для среднего дерева. Когда опрыскивание левого дерева будет завершено, безопасная высота БПЛА может быть сначала увеличена, в пункте нахождения левого дерева, до безопасной высоты для среднего дерева, и затем БПЛА летит к пункту нахождения среднего дерева в соответствии с безопасной высотой для этого среднего дерева. Если БПЛА оснащен высотомером для измерения высоты над уровнем земли, высоту БПЛА снижают, в пункте нахождения среднего дерева, до высоты опрыскивания среднего дерева. Среднее дерево опрыскивают по спиральной траектории на основе высоты опрыскивания.
Соответственно, если безопасная высота для следующего обрабатываемого объекта меньше безопасной высоты для текущего обрабатываемого объекта, БПЛА может перелететь, в соответствии с безопасной высотой, соответствующей текущему обрабатываемому объекту, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, после достижения пункта, соответствующего информации о географическом положении следующего обрабатываемого объекта, безопасная высота может быть отрегулирована к безопасной высоте или высоте опрыскивания следующего обрабатываемого объекта, после чего осуществляют опрыскивание следующего обрабатываемого объекта по спиральной траектории на основе радиуса опрыскивания этого следующего обрабатываемого объекта, в соответствии со способом, описываемым для этапа 103.
Например, на Фиг. 2, безопасная высота для правого дерева меньше безопасной высоты для среднего дерева. Когда среднее дерево будет опрыскано полностью, БПЛА может перелететь в пункт нахождения правого дерева в соответствии с безопасной высотой для среднего дерева. Затем безопасную высоту снижают, в пункте нахождения правого дерева, до безопасной высоты для правого дерева (если высотомера для измерения высоты над уровнем земли нет) или высоты опрыскивания правого дерева (если имеется высотомер для измерения высоты над уровнем земли). Затем осуществляют опрыскивание правого дерева по спиральной траектории на основе высоты распыления.
В предпочтительном варианте настоящего изобретения после завершения выполнения рабочего задания для текущего полета БПЛА способ согласно настоящему изобретению может содержать следующие этапы.
Получение информации о стартовом пункте, где БПЛА взлетает, и абсолютной высоты над уровнем моря, соответствующей этому стартовому пункту. После завершения выполнения рабочего задания текущего полета БПЛА высоту полета этого БПЛА регулируют к высоте возврата, эту высоту возврата получают путем увеличения абсолютной высоты над уровнем моря для БПЛА на заданную величину перепада высот. БПЛА совершает перелет к стартовому пункту в соответствии с высотой возврата и приземляется в стартовом пункте.
В качестве по меньшей мере одного из альтернативных вариантов, после того как текущий БПЛА выполнит все рабочие задания текущего полета, БПЛА может сначала получить информацию о стартовом пункте, записанную во время взлета, и об абсолютной высоте над уровнем моря, соответствующей стартовому пункту, и определить высоту возврата в соответствии с суммой абсолютной высоты над уровнем моря, соответствующей стартовому пункту, и заданного перепада высот.
Указанная заданная величина перепада высот используется для обеспечения того, чтобы БПЛА мог безопасно вернуться без столкновений с преградами. Эта величина может быть задана оператором или проектировщиком в соответствии с фактической ситуацией. Например, эта величина перепада может быть установлена равной 5 м, либо если пункт взлета БПЛА находится в наивысшей точке рабочего блока, величина перепада высот может быть установлена равной 3 м.
После определения высоты возврата, БПЛА может подняться на эту высоту возврата и перелететь в стартовый пункт в соответствии с высотой возврата. После достижения стартового пункта БПЛА приземляется в этом стартовом пункте.
Варианты настоящего изобретения могут быть применены к работе БПЛА в области защиты растений в усложненной рабочей среде, где топография растущих сельскохозяйственных культур не является плоской и не является открытой, а физические высоты и физическая ширина этих сельскохозяйственных культур являются несогласованными. Поскольку географическую информацию и условия роста каждой сельскохозяйственной культуры картируют заранее, БПЛА автономно перелетает к каждой сельскохозяйственной культуре или к каждому дереву для осуществления спирального полета по непрерывной траектории, полного опрыскивания каждой культуры или всех деревьев и точного управления дозой в соответствии с состоянием спирали, так что достигается эффект прецизионного опрыскивания.
Более того, варианты настоящего изобретения не требуют полного ручного участия, что экономит затраты на рабочую силу, повышает эффективность опрыскивания и уменьшает вероятность ошибки из-за ручного опрыскивания, вероятность пропусков опрыскивания и вероятность повторного опрыскивания.
На Фиг. 4, показана логическая схема этапов способа управления БПЛА согласно второму варианту настоящего изобретения. Этот способ может в качестве по меньшей мере одного из альтернативных вариантов содержит следующие этапы.
На этапе 201, получают список обрабатываемых объектов, которые нужно обработать, где этот список обрабатываемых объектов содержит картографическую информацию для более чем одного обрабатываемого объекта в последовательности, где эта картографическая информация содержит указания безопасной высоты, информацию о географическом положении и указание радиуса опрыскивания, для обрабатываемого объекта.
Варианты настоящего изобретения могут быть применены к процедурам защиты растений на неровном и/или не открытом грунте. Обрабатываемый объект в вариантах настоящего изобретения может иметь по меньшей мере следующие атрибуты: разница физических высот между обрабатываемыми объектами или разница между диаметрами описанных окружностей, в ортогональных проекциях, между обрабатываемыми объектами не меньше заданной пороговой величины.
В качестве примера, обрабатываемый объект может содержать, не ограничиваясь этим, культуру фруктового типа.
Сельскохозяйственная культура фруктового типа может расти в условиях различной топографии (рельефа), а также физические высоты (расстояние между уровнем поверхности и вершиной дерева) деревьев и физическая ширина (диаметр окружности, описанной вокруг дерева в плоскости вертикальной проекции этого дерева, или ширина по контуру самых дальних от центра (внешних) листьев) деревьев сильно различаются.
По меньшей мере в одном из альтернативных вариантов, список обрабатываемых объектов может содержать картографическую информацию о нескольких обрабатываемых объектах.
В качестве предпочтительного примера вариантов настоящего изобретения картографическая информация может содержать, не ограничиваясь этим, указания высоты над уровнем моря, физической высоты, физической ширины, безопасной высоты, информацию о географическом положении и указание радиуса опрыскивания обрабатываемого объекта.
В качестве по меньшей мере одного из альтернативных вариантов, безопасная высота обозначает высоту безопасного и беспрепятственного полета БПЛА. Такая безопасная высота может быть не меньше суммы высоты над уровнем моря и физической высоты обрабатываемого объекта и заданной высоты опрыскивания.
В качестве по меньшей мере одного из альтернативных вариантов, высоту над уровнем моря обрабатываемого объекта и физическую высоту обрабатываемого объекта получают из результатов измерения.
Термин высота опрыскивания обозначает высоту, с которой БПЛА, осуществляет опрыскивание главным образом вершин деревьев, иными словами, высота с которой достигается наилучший эффект опрыскивания, когда расстояние между БПЛА и вершиной обрабатываемого объекта составляет h метров. Эта величина может быть заранее задана оператором или проектировщиком на основе опыта. Например, эта величина может быть задана равной 1 м, что означает, что наилучший эффект опрыскивания достигается, когда расстояние между БПЛА и вершиной обрабатываемого объекта составляет 1 м.
Следует отметить, что высота опрыскивания для каждого обрабатываемого объекта может быть одинаковой, либо может быть установлена в соответствии с атрибутами роста и окружающей средой роста обрабатываемого объекта, что никак не ограничивается в вариантах настоящего изобретения.
Например, как показано на упрощенной схеме высоты опрыскивания обрабатываемого объекта, показанной на Фиг. 2, в предположении, что полученная высота над уровнем моря дерева равна H, физическая высота равна h1 и заданная высота опрыскивания равна h, безопасная высота может быть установлена не меньше H+h1+h.
На практике, если БПЛА имеет высотомер для измерения высоты над уровнем земли, то поскольку высоту деревьев трудно измерить точно, безопасная высота может быть установлена больше H+h1+h.
Информация о географическом положении может представлять собой указание широты и долготы центрального пункта обрабатываемого объекта. Например, когда обрабатываемый объект представляет собой фруктовое дерево, центральным пунктом этого обрабатываемого объекта может быть ствол дерева или центр окружности, описанной вокруг дерева в плоскости вертикальной проекции, а радиус опрыскивания может представлять собой расстояние между самыми наружными листьями и стволом дерева или радиус указанной выше описанной окружности, и в ходе выполнения процедуры опрыскивания, в пределах радиуса опрыскивания, необходимо опрыскивать эту область.
На практике, когда на дисплее представляют список обрабатываемых объектов, такими обрабатываемыми объектами можно управлять, организовывать их и нумеровать согласно соответствующей информации о географическом положении, номера обрабатываемых объектов наносят на карту вертикальной проекции для рабочих заданий, так что оператор может выбирать обрабатываемый объект, который он будет обрабатывать в текущий момент, по мере необходимости.
Обрабатываемые объекты могут быть пронумерованы в порядке нанесения на карту или сканированы и расположены (организованы) в некотором направлении, таком как северное направление. В случае опрыскивания для защиты растений на склоне холма защищаемые объекты могут быть распределены по уровням от нижнего к верхнему.
По меньшей мере в одном из альтернативных вариантов, БПЛА может получить картографическую информацию относительно обрабатываемого объекта от наземной станции по каналу передачи данных, причем на наземной станции эта картографическая информация может быть получена с использованием картографического устройства или аэрофотосъемки. Например, оператор может с высокой точностью нанести на карту, посредством картографического устройства, каждое фруктовое дерево в саду, который нужно опрыскать пестицидами, с целью получения соответствующей картографической информации, и затем передать эту картографическую информацию серверу. Этот сервер передает картографическую информацию в адрес ручной наземной станции через сеть связи. Затем наземная станция передает картографическую информацию полетному контроллеру БПЛА.
На этапе 202, обрабатываемый объект, выбранный из списка обрабатываемых объектов, получают в качестве текущего обрабатываемого объекта и считывают картографическую информацию относительно текущего обрабатываемого объекта.
После того, как БПЛА получит список обрабатываемых объектов, обрабатываемый объект наивысшего ранга из этого списка обрабатываемых объектов может быть использован в качестве обрабатываемого объекта, который нужно обработать в текущий момент, и затем БПЛА перелетает к каждому обрабатываемому объекту в последовательности для обработки.
В качестве альтернативы, БПЛА может также получить обрабатываемый объект, выбранный оператором из списка обрабатываемых объектов в качестве текущего обрабатываемого объекта, что не ограничивается вариантами настоящего изобретения.
Следует отметить, что при запуске БПЛА, картографическое устройство с устройством GPS большой точности в составе БПЛА может также автоматически зарегистрировать стартовый пункт этого БПЛА в момент взлета (такие данные, как широта и долгота пункта взлета) и абсолютную высоту над уровнем моря, соответствующую стартовому пункту.
На этапе 203, высоту полета БПЛА регулируют до безопасной высоты для текущего обрабатываемого объекта, и БПЛА совершает перелет в соответствии с этой безопасной высотой, в пункт, соответствующий информации о географическом положении текущего обрабатываемого объекта.
После того, как БПЛА получит картографическую информацию относительно текущего обрабатываемого объекта, можно на основе этой картографической информации определить безопасную высоту для этого текущего обрабатываемого объекта. Когда БПЛА стартовал, высоту полета этого БПЛА можно отрегулировать к безопасной высоте, и затем БПЛА летит, в соответствии с безопасной высотой с заданной скоростью полета, в пункт, обозначенный информацией о географическом положении текущего обрабатываемого объекта.
На этапе 204, осуществляют процедуру опрыскивания текущего обрабатываемого объекта в пункте, соответствующем информации о географическом положении текущего обрабатываемого объекта, на основе радиуса опрыскивания этого текущего обрабатываемого объекта.
Когда БПЛА достигнет пункта, соответствующего информации о географическом положении относительно текущего обрабатываемого объекта, если безопасная высота для текущего обрабатываемого объекта больше суммы высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания, прежде осуществления этапа 204, рассматриваемый вариант настоящего изобретения может дополнительно содержать следующий этап.
Если обрабатываемый объект оснащен высотомером для измерения высоты над уровнем земли, прежде осуществления процедуры опрыскивания обрабатываемого объекта, высоту полета БПЛА снижают, в пункте, соответствующем информации о географическом положении обрабатываемого объекта, до высоты, соответствующей сумме высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания.
В качестве по меньшей мере одного из альтернативных вариантов, когда БПЛА достигнет пункта, соответствующего информации о географическом положении для текущего обрабатываемого объекта, прежде осуществления этапа 204, можно сначала определить высоту опрыскивания. Когда БПЛА оснащен высотомером для измерения высоты над уровнем земли, фактическая высота опрыскивания может представлять собой сумму высоты над уровнем моря текущего обрабатываемого объекта, физической высоты текущего обрабатываемого объекта и заданной высоты опрыскивания. В это время, если безопасная высота БПЛА больше высоты опрыскивания, высоту полета БПЛА можно снизить до высоты опрыскивания.
Соответственно, когда БПЛА не имеет высотомера для измерения высоты над уровнем земли, безопасная высота может быть прямо взята в качестве высоты опрыскивания.
После определения высоты опрыскивания можно осуществить опрыскивание текущего обрабатываемого объекта по спиральной траектории в пункте, соответствующем информации о географическом положении этого текущего обрабатываемого объекта, этого на основе высоты опрыскивания.
В предпочтительном варианте настоящего изобретения процедура опрыскивания содержит опрыскивание по спиральной траектории, причем опрыскивание по спиральной траектории означает, что БПЛА может осуществлять опрыскивание, перемещаясь по трассе полета в форме спирали Архимеда.
В предпочтительном варианте настоящего изобретения этап 204 может содержать следующие подэтапы.
На подэтапе S21, определяют рабочие параметры, необходимые для опрыскивания по спиральной траектории, где совокупность этих рабочих параметров содержит радиус первоначального витка, число витков, шаг и угловую скорость в полете по спирали, где радиус первоначального витка не больше радиуса опрыскивания.
На подэтапе S22, указание информации о географическом положении обрабатываемого объекта, который нужно обработать, принимают в качестве центра спирали, БПЛА начинает полет по спирали с радиуса первоначального витка, радиус увеличивают на соответствующий шаг с каждым оборотом, обработку рассматриваемого обрабатываемого объекта завершают, когда будет удовлетворено требование числа витков и/или будет достигнут радиус опрыскивания, и во время полета корпус аппарата поворачивается в соответствии с угловой скоростью в полете по спирали.
Прежде осуществления полета по спирали сначала могут быть определены рабочие параметры, необходимые для опрыскивания по спиральной траектории. В качестве одного из примеров, совокупность рабочих параметров может содержать, не ограничиваясь этим, радиус r первоначального витка, число n витков, шаг d, угловую скорость в полете по спирали, угловую скорость поворота, скорость движения по спирали, радиус R опрыскивания текущего обрабатываемого объекта и другие подобные параметры.
Радиус r первоначального витка может быть задан в соответствии с моделью БПЛА, размером корпуса аппарата, позицией сопла и/или актуальными экспериментальными данными. Например, если БПЛА представляет собой аппарат четырехвинтовой модели шириной 1.5 м, радиус r может быть установлен примерно 0.75 м.
Число n витков и скорость по спирали могут быть установлены в соответствии с актуальной дозой опрыскивания текущего обрабатываемого объекта. Например, если дерево нужно опрыскать примерно 1 л пестицида и за один виток распыляют 0.3 л пестицида, число витков может быть равно 3.
Под шагом d понимают величину, на которую увеличивается радиус на каждом обороте, так что шаг составляет d=(R-r)/n.
Угловая скорость полета по спирали представляет собой угловую скорость, с которой центр БПЛА движется вокруг центра обрабатываемого объекта. Например, полет по одному витку спирали занимает 5 с, тогда угловая скорость полета по спирали составляет 360/5=75 градус/с. Эта величина может быть искусственно задана заранее или фиксировано установлена полетным контроллером.
Угловая скорость поворота представляет собой угловую скорость поворота воздушного судна вокруг центра этого воздушного судна. Величиной этой скорости управляет полетный контроллер. Результат управления может состоять, например, в том, что нос или крыло всегда указывает на центр поворота по спирали в процессе этого поворота.
Следует отметить, что в показанной на Фиг. 3 спирали, раскручивающейся изнутри наружу, радиус r первоначального витка меньше радиуса R опрыскивания.
На Фиг. 3, информация о географическом положении обрабатываемого объекта принята в качестве центра спирали, БПЛА начинает полет по спирали от центра к наружному кольцу изнутри наружу с радиусом первоначального витка, радиус спирали становится все больше и больше, увеличиваясь на одну и ту же величину шага с каждым оборотом, и опрыскивание завершается, когда радиус спиральной траектории БПЛА станет больше радиуса R опрыскивания.
Во время полета по спирали корпус также может поворачиваться, так что угловая скорость поворота и угловая скорость полета по спирали являются одинаковыми, вследствие чего может быть образован угол фиксированной величины между направлением, куда указывает нос, и направлением на центр БПЛА относительно центра спирали.
Следует отметить, что варианты настоящего изобретения не ограничиваются указанной выше спиралью, раскручивающейся изнутри наружу, так что спираль может представлять собой спираль, закручивающуюся снаружи внутрь, иными словами радиус первоначального витка равен радиусу опрыскивания, а радиус спирали становится все меньше и меньше.
На практике, если радиус R опрыскивания меньше диапазона опрыскивания воздушного судна, это воздушное судно может осуществлять опрыскивание, поворачиваясь на месте, без полета по трассе, имеющей форму спирали Архимеда.
На этапе 205, после завершения обработки текущего обрабатываемого объекта, считывают картографическую информацию относительно следующего обрабатываемого объекта и оценивают, является ли безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта. Если так, осуществляют этап 206. В противном случае выполняют этап 207.
На этапе 206, регулируют высоту полета БПЛА, в пункте нахождения текущего обрабатываемого объекта, к безопасной высоте для следующего обрабатываемого объекта, БПЛА летит, в соответствии с отрегулированной безопасной высотой, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, и осуществляет процедуру опрыскивания следующего обрабатываемого объекта, в пункте, соответствующем информации о географическом положении следующего обрабатываемого объекта, на основе радиуса опрыскивания для следующего обрабатываемого объекта.
На этапе 207, БПЛА осуществляет перелет, в соответствии с безопасной высотой для текущего обрабатываемого объекта, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, когда аппарат достигнет пункта, соответствующего информации о географическом положении следующего обрабатываемого объекта, безопасную высоту регулируют к безопасной высоте для следующего обрабатываемого объекта, и осуществляют процедуру опрыскивания следующего обрабатываемого объекта в соответствии с радиусом опрыскивания для этого следующего обрабатываемого объекта на основе отрегулированной безопасной высоты.
Поскольку физическая высота каждого обрабатываемого объекта не согласована с высотами других объектов, после завершения обработки текущего обрабатываемого объекта может быть произведено считывание картографической информации относительно следующего обрабатываемого объекта, расположенного за текущим обрабатываемым объектом, далее извлекают величину безопасной высоты для следующего обрабатываемого объекта из прочитанной картографической информации, оценивают, является ли безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта, если это так, увеличивают высоту полета БПЛА в пункте нахождения текущего обрабатываемого объекта до безопасной высоты для следующего обрабатываемого объекта (если имеется высотомер для измерения высоты над уровнем земли, БПЛА летит к безопасной высоте для текущего обрабатываемого объекта и затем летит к безопасной высоте для следующего обрабатываемого объекта от безопасной высоте для текущего обрабатываемого объекта), далее БПЛА летит, в соответствии с отрегулированной безопасной высотой, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, и осуществляет опрыскивание следующего обрабатываемого объекта по спиральной траектории в пункте, соответствующем информации о географическом положении следующего обрабатываемого объекта, на основе радиуса опрыскивания следующего обрабатываемого объекта с учетом способа, описываемого на этапе 204.
Если безопасная высота для следующего обрабатываемого объекта меньше безопасной высоты для текущего обрабатываемого объекта, БПЛА может перелететь, в соответствии с безопасной высотой, соответствующей текущему обрабатываемому объекту, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, после достижения пункта, соответствующего информации о географическом положении следующего обрабатываемого объекта, безопасная высота может быть отрегулирована к безопасной высоте или высоте опрыскивания для следующего обрабатываемого объекта, после чего осуществляют опрыскивание следующего обрабатываемого объекта по спиральной траектории на основе радиуса опрыскивания этого следующего обрабатываемого объекта, в соответствии со способом, описываемым для этапа 204.
В предпочтительном варианте настоящего изобретения после завершения выполнения рабочего задания для текущего полета БПЛА способ согласно настоящему изобретению может содержать следующие этапы.
Получение информации о стартовом пункте, где БПЛА взлетает, и абсолютной высоты над уровнем моря, соответствующей этому стартовому пункту. После завершения обработки всех обрабатываемых объектов из списка обрабатываемых объектов высоту полета БПЛА регулируют к высоте возврата, эту высоту возврата получают путем увеличения абсолютной высоты над уровнем моря для БПЛА на заданную величину перепада высот. БПЛА совершает перелет к стартовому пункту в соответствии с высотой возврата и приземляется в стартовом пункте.
Варианты настоящего изобретения могут быть применены к работе БПЛА в области защиты растений в усложненной рабочей среде, где топография растущих сельскохозяйственных культур не является плоской и не является открытой, а физические высоты и физическая ширина этих сельскохозяйственных культур являются несогласованными. Поскольку географическую информацию и условия роста каждой сельскохозяйственной культуры картируют заранее, БПЛА может автономно регулировать безопасную высоту для каждой сельскохозяйственной культуры или дерева в последовательности без полного ручного участия, сберегая тем самым затраты на рабочую силу, повышая эффективность опрыскивания и уменьшая вероятность ошибок, обусловленных ручным опрыскиванием, вероятность пропусков опрыскивания и вероятность повторного опрыскивания.
Следует отметить, что все варианты способа для простоты описания выражены в виде последовательности сочетаний действий, однако специалисты в рассматриваемой области должны понимать, что варианты настоящего изобретения не исчерпываются описанными последовательностями действий, поскольку некоторые этапы могут быть выполнены в других последовательностях или одновременно в соответствии с вариантами настоящего изобретения. В последующем специалисты в рассматриваемой области также должны понимать, что варианты, представленные в настоящем описании, все являются предпочтительными вариантами, и что участвующие в них действия не обязательно требуются во всех вариантах.
На Фиг. 5, показана структурная блок-схема устройства управления БПЛА в соответствии с первым вариантом устройства согласно настоящему изобретению. Это устройство может содержать: компонент 301 для получения картографической информации, первый компонент 302 для регулирования безопасной высоты, первый полетный компонент 303 и компонент 304 для опрыскивания по спиральной траектории.
Компонент 301 для получения картографической информации конфигурирован для получения картографической информации относительно обрабатываемого объекта, который нужно обработать, где эта картографическая информация содержит указание безопасной высоты, информацию о географическом положении и указание радиуса опрыскивания для обрабатываемого объекта.
Первый компонент 302 для регулирования безопасной высоты конфигурирован для регулирования высоты полета БПЛА к безопасной высоте.
Первый полетный компонент 303 конфигурирован для перелета в соответствии с безопасной высотой в пункт, соответствующий информации о географическом положении.
Компонент 304 для опрыскивания по спиральной траектории конфигурирован для осуществления, в пункте, соответствующем информации о географическом положении, опрыскивания обрабатываемого объекта по спиральной траектории на основе радиуса опрыскивания.
В предпочтительном варианте настоящего изобретения, если имеются несколько обрабатываемых объектов, устройство может далее содержать компонент для оценки высоты, третий компонент для регулирования высоты и четвертый компонент для регулирования высоты.
Компонент для оценки высоты конфигурирован для считывания, после завершения обработки текущего обрабатываемого объекта, картографической информации относительно следующего обрабатываемого объекта, оценки, является ли безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта, если так, вызова третьего компонента для регулирования высоты, и если нет, вызова четвертого компонента для регулирования высоты.
Третий компонент для регулирования высоты конфигурирован для регулирования, в пункте нахождения текущего обрабатываемого объекта, высоты полета БПЛА к безопасной высоте для следующего обрабатываемого объекта, вызов первого полетного компонента для осуществления перелета, в соответствии с безопасной высотой, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, и вызов компонента для опрыскивания по спиральной траектории с целью осуществления, в пункте, соответствующем информации о географическом положении следующего обрабатываемого объекта, опрыскивания следующего обрабатываемого объекта по спиральной траектории на основе радиуса опрыскивания для следующего обрабатываемого объекта.
Четвертый компонент для регулирования высоты конфигурирован для перелета, в соответствии с безопасной высотой, соответствующей текущему обрабатываемому объекту, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, регулирования безопасной высоты к безопасной высоте для следующего обрабатываемого объекта, когда будет достигнут пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, и вызова компонента для опрыскивания по спиральной траектории с целью осуществления, в соответствии с радиусом опрыскивания для следующего обрабатываемого объекта и отрегулированной безопасной высотой, опрыскивания следующего обрабатываемого объекта по спиральной траектории.
В предпочтительном варианте настоящего изобретения устройство может дополнительно содержать первый компонент для получения информации о стартовом пункте, первый компонент для регулирования высоты возврата и первый компонент для возврата.
Первый компонент для получения информации о стартовом пункте конфигурирован для получения указания стартового пункта, где БПЛА взлетает, и абсолютной высоты над уровнем моря, соответствующей этому стартовому пункту.
Первый компонент для регулирования высоты возврата конфигурирован для регулирования, после завершения текущей операции перелета БПЛА, высоты полета этого БПЛА к высоте возврата, эту высоту возврата получают путем увеличения абсолютной высоты над уровнем моря БПЛА на заданную величину перепада высот.
Первый компонент для возврата конфигурирован для перелета к стартовому пункту в соответствии с высотой возврата и посадки в этом стартовом пункте.
В предпочтительном варианте настоящего изобретения, картографическая информация может дополнительно содержать указание высоты над уровнем моря обрабатываемого объекта и физической высоты обрабатываемого объекта, а безопасная высота может быть не меньше суммы высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания.
В предпочтительном варианте настоящего изобретения, если безопасная высота больше суммы высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания, устройство дополнительно содержит первый компонент для снижения высоты.
Этот первый компонент для снижения высоты конфигурирован для снижения в пункте, соответствующем информации о географическом положении, если БПЛА оснащен высотомером для измерения высоты над уровнем земли, высоты полета этого БПЛА до высоты, соответствующей сумме высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания.
В предпочтительном варианте настоящего изобретения, компонент 304 для опрыскивания по спиральной траектории содержит первый подкомпонент для определения рабочих параметров и первый подкомпонент для полета по спирали.
Первый подкомпонент для определения рабочих параметров конфигурирован для определения рабочих параметров, требуемых для опрыскивания по спиральной траектории, совокупность этих рабочих параметров содержит радиус первоначального витка, число витков, шаг и угловую скорость в полете по спирали, где радиус первоначального витка не больше радиуса опрыскивания.
Первый подкомпонент для полета по спирали конфигурирован для принятия информации о географическом положении относительно обрабатываемого объекта в качестве указания центра спирали, начала полета вокруг центра спирали с радиусом первоначального витка, увеличение радиуса на соответствующую величину шага на каждом обороте, завершение обработки рассматриваемого обрабатываемого объекта, когда будет удовлетворен критерий числа витков и/или будет достигнут радиус опрыскивания, и, во время полета, поворот корпуса в соответствии с угловой скоростью в полете по спирали.
В предпочтительных вариантах настоящего изобретения обрабатываемый объект в вариантах настоящего изобретения может иметь по меньшей мере следующие атрибуты:
Разница физических высот между обрабатываемыми объектами или разница между диаметрами описанных окружностей, в ортогональных проекциях, между обрабатываемыми объектами не меньше заданной пороговой величины.
Для варианта способа, показанного на Фиг. 5, поскольку этот вариант в основном аналогичен варианту способа, показанному на Фиг. 1, описание является относительно простым, так что относительно соответствующих частей можно обратиться к описанию варианта способа применительно к Фиг. 1.
На Фиг. 6, показана структурная блок-схема устройства управления БПЛА в соответствии со вторым вариантом устройства согласно настоящему изобретению. Устройство может содержать: компонент 401 для получения списка обрабатываемых объектов, компонент 402 для считывания картографической информации, второй компонент 403 для регулирования безопасной высоты, второй полетный компонент 404, опрыскивающий компонент 405, оценивающий компонент 406, первый компонент 407 для регулирования высоты и второй компонент 408 для регулирования высоты.
Компонент 401 для получения списка обрабатываемых объектов конфигурирован для получения списка обрабатываемых объектов, которые нужно обработать, этот список обрабатываемых объектов содержит картографическую информацию относительно более одного обрабатываемого объекта, организованную в последовательности, и эта картографическая информация содержит указание безопасной высоты, информацию о географическом положении и указание радиуса опрыскивания для обрабатываемого объекта.
Компонент 402 для считывания картографической информации конфигурирован для получения одного обрабатываемого объекта, выбранного из списка обрабатываемых объектов, в качестве текущего обрабатываемого объекта, и считывания картографической информации относительно текущего обрабатываемого объекта.
Второй компонент 403 для регулирования безопасной высоты конфигурирован для регулирования высоты полета БПЛА к безопасной высоте для текущего обрабатываемого объекта.
Второй полетный компонент 404 конфигурирован для перелета в пункт, соответствующий информации о географическом положении относительно текущего обрабатываемого объекта, на соответствующей безопасной высоте.
Опрыскивающий компонент 405 конфигурирован для осуществления, в пункте, соответствующем информации о географическом положении относительно текущего обрабатываемого объекта, процедуры опрыскивания текущего обрабатываемого объекта на основе радиуса опрыскивания для текущего обрабатываемого объекта.
Оценивающий компонент 406 конфигурирован для считывания, после завершения обработки текущего обрабатываемого объекта, картографической информации относительно следующего обрабатываемого объекта, оценки, является ли безопасная высота для следующего обрабатываемого объекта больше безопасной высоты для текущего обрабатываемого объекта, если так, вызова первого компонента для регулирования высоты, и если нет, вызова второго компонента для регулирования высоты.
Первый компонент 407 для регулирования высоты конфигурирован для регулирования, в пункте нахождения текущего обрабатываемого объекта, высоты полета БПЛА к безопасной высоте для следующего обрабатываемого объекта, вызова второго полетного компонента для осуществления перелета в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, в соответствии с отрегулированной безопасной высотой, и вызова опрыскивающего компонента для осуществления, в пункте, соответствующем информации о географическом положении относительно следующего обрабатываемого объекта, процедура опрыскивания следующего обрабатываемого объекта на основе радиуса опрыскивания для следующего обрабатываемого объекта.
Второй компонент 408 для регулирования высоты конфигурирован для перелета, в соответствии с безопасной высотой, соответствующей текущему обрабатываемому объекту, в пункт, соответствующий информации о географическом положении следующего обрабатываемого объекта, регулирования безопасной высоты к безопасной высоте для следующего обрабатываемого объекта, когда будет достигнут пункт, соответствующий информации о географическом положении относительно следующего обрабатываемого объекта, и вызова опрыскивающего компонента для осуществления, на основе отрегулированной безопасной высоты, процедуры опрыскивания следующего обрабатываемого объекта в соответствии с радиусом опрыскивания следующего обрабатываемого объекта.
В предпочтительном варианте настоящего изобретения, устройство может дополнительно содержать второй компонент для получения информации о стартовом пункте, второй компонент для регулирования высоты возврата и второй компонент для возврата.
Второй компонент для получения информации о стартовом пункте конфигурирован для получения указания стартового пункта, в котором взлетает БПЛА, и абсолютной высоты над уровнем моря, соответствующей этому стартовому пункту.
Второй компонент для регулирования высоты возврата конфигурирован для регулирования, после завершения обработки всех обрабатываемых объектов из списка обрабатываемых объектов, высоты полета БПЛА к высоте возврата, эту высоту возврата получают путем увеличения абсолютной высоты над уровнем моря БПЛА на заданную величину перепада высот.
Второй компонент для возврата конфигурирован для осуществления перелета в стартовый пункт в соответствии с высотой возврата, и посадки в этом стартовом пункте.
В предпочтительном варианте настоящего изобретения, картографическая информация может дополнительно содержать указание высоты над уровнем моря обрабатываемого объекта и физической высоты обрабатываемого объекта, и эта безопасная высота может быть не меньше суммы высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания.
В предпочтительном варианте настоящего изобретения, если безопасная высота некоторого обрабатываемого объекта больше суммы высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания, устройство дополнительно содержит второй компонент для снижения высоты.
Второй компонент для снижения высоты конфигурирован для, прежде осуществления процедуры опрыскивания обрабатываемого объекта, снижения в пункте, соответствующем информации о географическом положении обрабатываемого объекта, если этот обрабатываемый объект оснащен высотомером для измерения высоты над уровнем земли, высоты полета БПЛА до высоты, соответствующей сумме высоты над уровнем моря обрабатываемого объекта, физической высоты обрабатываемого объекта и заданной высоты опрыскивания.
В предпочтительном варианте настоящего изобретения, процедура опрыскивания содержит опрыскивание по спиральной траектории. Второй подкомпонент для определения рабочих параметров и второй подкомпонент для полета по спирали вызывают для осуществления опрыскивания по спиральной траектории.
Второй подкомпонент для определения рабочих параметров конфигурирован для определения рабочих параметров, требуемых для опрыскивания по спиральной траектории, совокупность этих рабочих параметров содержит радиус первоначального витка, число витков, шаг и угловую скорость в полете по спирали, где этот радиус первоначального витка не больше радиуса опрыскивания.
Второй подкомпонент для полета по спирали конфигурирован для принятия информации о географическом положении обрабатываемого объекта в качестве указания центра спирали, старта полета вокруг этого центра с радиусом первоначального витка, увеличения радиуса на величину соответствующего шага на каждом обороте, завершения обработки рассматриваемого обрабатываемого объекта, когда будет удовлетворено требование числа витков и/или будет достигнут радиус опрыскивания, и во время полета, поворота корпуса в соответствии с угловой скорости в полете по спирали.
В предпочтительном варианте настоящего изобретения обрабатываемый объект имеет по меньшей мере следующие атрибуты:
Разница физических высот между обрабатываемыми объектами или разница между диаметрами описанных окружностей, в ортогональных проекциях, между обрабатываемыми объектами не меньше заданной пороговой величины.
Для варианта способа, показанного на Фиг. 6, поскольку этот вариант в основном аналогичен варианту способа, показанному на Фиг. 4, описание является относительно простым, так что относительно соответствующих частей можно обратиться к описанию варианта способа применительно к Фиг. 1.
Различные варианты настоящего изобретения описаны последовательно, описание каждого варианта фокусируется на отличиях этого варианта от других вариантов, а описания идентичных или подобных частей различных вариантов могут ссылаться одни на другие.
Специалист в рассматриваемой области должен понимать, что варианты настоящего изобретения могут быть представлены в виде способа, устройства или компьютерного программного продукта. Таким образом, варианты настоящего изобретения могут принять формы полностью аппаратных вариантов, полностью программных вариантов или вариантов, интегрирующих программное обеспечение и аппаратуру. Более того, варианты настоящего изобретения могут принимать форму компьютерного программного продукта, выполненного на одном или нескольких доступных носителях для хранения информации (включая, но не ограничиваясь этим, дисковое запоминающее устройство, устройство CD-ROM, оптическое запоминающее устройство или другое подобное устройство), на которых записаны компьютерные программные коды.
Варианты настоящего изобретения описаны со ссылками на логические схемы и/или блок-схемы способа, терминала (системы) и компьютерный программный продукт согласно вариантам настоящего изобретения. Следует понимать, что каждая последовательность операций и/или блок на логических схемах и/или блок-схемах и сочетания последовательностей операций и/или блоков на логических схемах и/или блок-схемах могут быть реализованы посредством команд компьютерных программ. Эти команды компьютерных программ могут быть созданы для компьютера общего назначения, специализированного компьютера, встроенного процессора или процессоров других программируемых устройств и терминалов обработки данных для генерации машины, так что аппаратуру для реализации функций, обозначенных в одной или нескольких последовательностях операций, представленных на логических схемах, и/или в одном или нескольких блоках на блок-схемах, генерируют посредством команд, выполняемых компьютерами или процессорами других программируемых терминалов для обработки данных.
Эти команды компьютерных программ могут быть сохранены в читаемом компьютером запоминающем устройстве и способны управлять компьютерами или другими программируемыми терминалами для обработки данных для работы в заданном режиме, так что выполнение этих команд, записанных в читаемом компьютером запоминающем устройстве, ведет к генерации командной аппаратуры, которая реализует функции, обозначенные в одной или нескольких последовательностях операций, показанных на логических схемах, и/или в одном или нескольких блоках, представленных на блок-схемах.
Команды компьютерных программ могут также быть загружены в компьютеры или в другие программируемые терминалы для обработки данных, так что компьютеры осуществляют такую обработку путем выполнения последовательности этапов способов компьютерами или другими программируемыми терминалами, и поэтому команды, выполняемые компьютерами или другими программируемыми терминалами, обеспечивают достижение функций, обозначенных в одной или нескольких последовательностях операций, показанных на логических схемах, и/или в одном или нескольких блоках, представленных на блок-схемах.
Хотя были описаны предпочтительные варианты настоящего изобретения, специалисты в рассматриваемой области могут внести дополнительные изменения и модификации в варианты на основе знания базовой креативной концепции. Поэтому, прилагаемую Формулу изобретения следует интерпретировать как содержащую предпочтительные варианты, и все эти изменения и модификации попадут в пределы объема вариантов настоящего изобретения.
Наконец, следует также отметить, что относительные термины, такие как первый и второй, используются просто для отличения одного объекта или операции от другого объекта или операции и не обязательно требуют или предполагают существование каких-либо фактически соотношений или порядка между этими объектами или операциями. Более того, термины «включает (в себя)», «содержит» и какие-либо другие вариации этих терминов, предназначены для охвата неэксклюзивного включения, так что процесс, способ, изделие или терминал, содержащий ряд элементов, включает не только эти элементы, но также включает те элементы, которые не были перечислены в явном виде, или включает элементы, присущие такому процессу, способу, изделию или терминалу. В условиях, когда других ограничений больше нет, не исключено, что в рассматриваемых процессе, способе, изделии или терминале присутствуют дополнительные идентичные элементы, включая элементы, определяемые формулой «включающий (в себя) …».
Выше приведено подробное описание способа и устройства для управления БПЛА согласно настоящему изобретению. Принцип и способ реализации настоящего изобретения описаны здесь на конкретных примерах. Описание вариантов предназначено только для помощи в понимании способа согласно настоящему изобретению и его основных идей. Более того, даже для рядовых специалистов в рассматриваемой области должно быть понятно, что возможны изменения конкретных способов реализации настоящего изобретения и объемов применения. В заключение, приведенное выше описание не следует рассматривать в качестве ограничений для настоящего изобретения.
Реферат
Группа изобретений относится к способам и устройствам управления беспилотным летательным аппаратом (БПЛА). В первом способе для проведения опрыскивания обрабатываемого объекта по определенной траектории получают картографическую информацию об обрабатываемом объекте, регулируют высоту полета БПЛА до безопасной высоты определенным образом, производят перелет в указанный пункт. Второй способ отличается от первого тем, что последовательно обеспечивают обработку нескольких объектов. Первое и второе устройства содержат компоненты обеспечения реализации соответственно первого и второго способов. Обеспечивается увеличение эффективности опрыскивания, уменьшение вероятности повторного опрыскивания. 4 н. и 10 з.п. ф-лы, 6 ил.
Комментарии