Система дистанционного управления транспортным средством и устройство дистанционного управления - RU2737080C1
Код документа: RU2737080C1
Чертежи















Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники
[0001] Настоящее изобретение относится к системе дистанционного управления транспортным средством и устройству дистанционного управления.
2. Уровень техники
[0002] В нерассмотренной японской патентной заявке № 2018-77649 (JP 2018-77649 A) раскрыта технология, связанная с дистанционным управлением транспортным средством. В заявке описано устройство дистанционного управления, в котором при передаче запроса на дистанционное управление от транспортного средства удаленный оператор передает на транспортное средство угол поворота рулевого колеса, а система рулевого управления транспортного средства осуществляет поворот на угол, переданный удаленным оператором.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Вместо процесса движения, в рамках которого удаленный оператор контролирует работу рулевого устройства, предложена система, при использовании которой беспилотное транспортное средство самостоятельно движется в соответствии с командами от оператора дистанционного управления (ДУ), осуществляющего такое управление. При этом в патентной заявке JP 2018-77649 A указано, что дистанционное управление выполняется по запросу с беспилотного транспортного средства; однако, если выделенный оператор дистанционного управления будет определяться при каждом получении запроса с беспилотного транспортного средства, потребуется большое количество операторов дистанционного управления, что, соответственно, является неэффективным.
[0004] Таким образом, настоящим изобретением предложена система дистанционного управления транспортным средством и устройство дистанционного управления, способные заблаговременно назначить периоды отслеживания нескольких беспилотных транспортных средств одному оператору дистанционного управления.
[0005] Первым объектом настоящего изобретения является система дистанционного управления транспортным средством для передачи оператором дистанционного управления команды дистанционного управления беспилотным транспортным средством в соответствии с ситуацией, в которой находится беспилотное транспортное средство. Система дистанционного управления транспортным средством содержит: блок распознавания ситуации в удаленной точке управления, сконфигурированный для распознавания ситуации в удаленной точке управления, то есть ситуации, в которой беспилотное транспортное средство должно запрашивать у оператора дистанционного управления команду дистанционного управления для движения на целевом маршруте, заранее заданном для беспилотного транспортного средства, на основании информации о целевом маршруте, местоположении беспилотного транспортного средства и картографической информации; блок прогнозирования времени, сконфигурированный для прогнозирования времени начала и времени завершения отслеживания оператором дистанционного управления ситуации в удаленной точке управления на целевом маршруте с учетом заранее заданной скорости транспортного средства или плана скорости движения беспилотного транспортного средства с учетом целевого маршрута, информации о местоположении беспилотного транспортного средства, картографической информации и ситуации в удаленной точке управления на целевом маршруте; и блок распределения периодов отслеживания, сконфигурированный для распределения периодов отслеживания нескольким операторам дистанционного управления в зависимости от времени начала и времени завершения отслеживания ситуаций в удаленных точках управления для нескольких беспилотных транспортных средств. Период отслеживания является промежутком времени между временем начала и временем завершения отслеживания ситуации в удаленной точке управления. Блок распределения периодов отслеживания сконфигурирован для назначения периодов отслеживания нескольких беспилотных транспортных средств одному оператору дистанционного управления.
[0006] Система дистанционного управления транспортным средством, являющаяся первым объектом настоящего изобретения, позволяет распознавать ситуацию в удаленной точке управления, то есть ситуацию, в которой беспилотное транспортное средство должно запросить у средства дистанционного управления указания на движение по целевому маршруту, а также прогнозировать время начала отслеживания оператором дистанционного управления ситуации в удаленной точке управления на целевом маршруте на основании целевого маршрута беспилотного транспортного средства, информации о местоположении беспилотного транспортного средства, а также картографической информации. Таким образом, в соответствии с этой системой дистанционного управления транспортным средством периоды отслеживания нескольких беспилотных транспортных средств могут быть назначены одному оператору дистанционного управления заблаговременно, путем прогнозирования времени начала отслеживания оператором дистанционного управления ситуации на целевом маршруте с удаленной точки управления. Данная система дистанционного управления транспортным средством, по сравнению с вариантом, в котором решение о назначении оператора дистанционного управления принимается каждый раз, когда с беспилотного транспортного средства поступает запрос на дистанционное управление, позволяет повысить эффективность работы оператора дистанционного управления за счет назначения периодов отслеживания нескольких беспилотных транспортных средств одному оператору дистанционного управления таким образом, чтобы несколько беспилотных транспортных средств можно было отслеживать меньшим числом операторов дистанционного управления.
[0007] Система дистанционного управления транспортным средством, являющаяся первым объектом настоящего изобретения, может дополнительно содержать блок прогнозирования задержки установления соединения, сконфигурированный для прогнозирования задержки установления соединения в соответствии с ситуацией в удаленной точке управления на целевом маршруте на основании картографической информации и ситуации в удаленной точке управления на целевом маршруте. Блок прогнозирования времени может быть сконфигурирован для прогнозирования времени начала отслеживания ситуации в удаленной точке управления на основании задержки соединения в удаленной точке управления, спрогнозированной блоком прогнозирования задержки соединения, информации о местоположении беспилотного транспортного средства, целевого маршрута и картографической информации. В данной системе дистанционного управления транспортным средством момент времени, в который ситуация в удаленной точке управления отражается в беспилотном транспортном средстве, может отличаться от времени начала отслеживания оператором дистанционного управления вследствие задержки установления соединения между оператором дистанционного управления и беспилотным транспортным средством. Это позволяет более точно прогнозировать время начала отслеживания на основании прогноза задержки установления соединения в соответствии с ситуацией в удаленной точке управления на целевом маршруте беспилотного транспортного средства, составленного с учетом целевого маршрута и картографической информации, а также на основании прогноза времени начала отслеживания с учетом прогнозируемой задержки установления соединения.
[0008] Система дистанционного управления транспортным средством, являющаяся первым объектом настоящего изобретения, может дополнительно содержать блок назначения допустимого времени отмены, сконфигурированный для назначения допустимого времени отмены для команды, подаваемой оператором дистанционного управления, на основании информации о местоположении беспилотного транспортного средства и картографической информации или на основании данных об окружении беспилотного транспортного средства; и блок передачи информации, сконфигурированный для передачи информации о допустимом времени отмены оператору дистанционного управления. При использовании данной системы дистанционного управления транспортным средством возможен вариант, в котором команды, переданные оператором дистанционного управления, не могут быть отменены вследствие выполнения беспилотным транспортным средством соответствующих команд дистанционного управления. Оператор дистанционного управления может подтвердить допустимое время отмены, путем назначения допустимого времени отмены команды дистанционного управления на основании местоположения беспилотного транспортного средства и картографической информации (или окружения вокруг беспилотного транспортного средства), а также передав информацию о допустимом времени отмены оператору дистанционного управления.
[0009] Система дистанционного управления транспортным средством, являющаяся первым объектом настоящего изобретения, может дополнительно содержать блок замены оператора дистанционного управления, сконфигурированный для замены оператора дистанционного управления, контролирующего ситуацию в удаленной точке управления, на другого оператора дистанционного управления, если время, прошедшее с момента начала отслеживания ситуации в удаленной точке управления, равно порогу времени, установленному для замены оператора дистанционного управления, или превышает его, и оператор дистанционного управления не вводит команду дистанционного управления. В данной системе дистанционного управления транспортным средством, если оператор дистанционного управления не может выдать команду дистанционного управления в течение определенного периода времени, оператор дистанционного управления, контролирующий ситуацию, может быть заменен другим оператором дистанционного управления. Таким образом, можно исключить ситуацию, в которой беспилотное транспортное средство в течение длительного времени не может получать команду дистанционного управления вследствие обстоятельств, связанных с оператором дистанционного управления.
[0010] В системе дистанционного управления транспортным средством, являющейся первым объектом настоящего изобретения, блок распределения периодов отслеживания может быть сконфигурирован для регулирования количества перекрытий периодов таким образом, чтобы оно было меньше заранее заданного порога количества операторов дистанционного управления путем изменения плана скорости движения или целевого маршрута, по меньшей мере, одного целевого транспортного средства из нескольких беспилотных транспортных средств, когда блок распределения периодов отслеживания проверяет, равно ли количество перекрытий периодов ситуаций несколькими транспортными средствами в удаленных точках управления порогу количества операторов дистанционного управления или превышает его, и определяет, что количество перекрытий периодов равно порогу количества операторов дистанционного управления или превышает его. В данной системе дистанционного управления транспортным средством, когда будет определено, что количество перекрытий периодов ситуаций в удаленных точках управления нескольких беспилотных транспортных средств равно заданному порогу количества операторов дистанционного управления или превышает его, план скорости движения или целевой маршрут указанного транспортного средства изменяют таким образом, чтобы количество перекрытий периодов было меньше порога количества оператора дистанционного управления. Таким образом, можно предотвратить перекрытие задач отслеживания беспилотных транспортных средств за пределами заданного порога количества операторов дистанционного управления.
[0011] Вторым объектом настоящего изобретения является устройство дистанционного управления для передачи оператором дистанционного управления команды дистанционного управления беспилотным транспортным средством в соответствии с ситуацией, в которой находится беспилотное транспортное средство. Устройство дистанционного управления содержит: блок распознавания ситуации в удаленной точке управления, сконфигурированный для распознавания ситуации в удаленной точке управления, то есть ситуации, в которой беспилотное транспортное средство должно запрашивать от оператора дистанционного управления команды дистанционного управления на движение на целевом маршруте, заранее заданном для беспилотного транспортного средства, на основании информации о целевом маршруте, местоположении беспилотного транспортного средства и картографической информации; блок прогнозирования времени, сконфигурированный для прогнозирования моментов времени, в которые оператор дистанционного управления начинает и завершает отслеживание ситуации в удаленной точке управления на целевом маршруте с учетом заранее заданной скорости транспортного средства или плана скорости движения беспилотного транспортного средства на основании целевого маршрута, информации о местоположении беспилотного транспортного средства, картографической информации и ситуации в удаленной точке управления на заранее заданном целевом маршруте; и блок распределения периодов отслеживания, сконфигурированный для распределения периодов отслеживания нескольким операторам дистанционного управления на основании времени начала и времени завершения отслеживания ситуации в удаленных точках управления для нескольких беспилотных транспортных средств. Период отслеживания является промежутком времени между временем начала и временем завершения отслеживания ситуации в удаленной точке управления. Блок распределения периодов отслеживания сконфигурирован для назначения периодов отслеживания нескольких беспилотных транспортных средств одному оператору дистанционного управления.
[0012] В соответствии со вторым аспектом настоящего изобретения устройство дистанционного управления позволяет распознавать ситуацию в удаленной точке управления, то есть ситуацию, в которой беспилотное транспортное средство должно запросить у оператора дистанционного управления команды дистанционного управления на движение по целевому маршруту, а также прогнозировать время начала отслеживания оператором дистанционного управления ситуации в удаленной точке управления на целевом маршруте на основании целевого маршрута беспилотного транспортного средства, информации о местоположении беспилотного транспортного средства, а также картографической информации. Таким образом, в этом устройстве дистанционного управления периоды отслеживания нескольких беспилотных транспортных средств могут быть назначены одному оператору дистанционного управления заблаговременно, путем прогнозирования времени начала отслеживания оператором дистанционного управления ситуации в удаленной точке управления на целевом маршруте. Данное устройство дистанционного управления по сравнению с вариантом, в котором решение о назначении оператора дистанционного управления принимается каждый раз, когда с беспилотного транспортного средства поступает запрос команды управления, позволяет повысить эффективность работы операторов дистанционного управления за счет назначения периодов отслеживания нескольких беспилотных транспортных средств одному оператору дистанционного управления таким образом, чтобы несколько беспилотных транспортных средств можно было отслеживать меньшим числом операторов дистанционного управления.
[0013] С учетом вышеизложенных аспектов настоящего изобретения периоды отслеживания нескольких беспилотных транспортных средств могут быть заранее назначены одному оператору дистанционного управления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0014] Отличительные признаки, преимущества, техническая и промышленная значимость примеров осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи, в которых одинаковые обозначения относятся к одинаковым элементам:
На ФИГ. 1 изображена схема, иллюстрирующая пример системы дистанционного управления транспортным средством в соответствии с первым примером осуществления изобретения.
На ФИГ. 2 изображена схема, иллюстрирующая пример конфигурации беспилотного транспортного средства;
На ФИГ. 3 изображена схема, иллюстрирующая пример аппаратной конфигурации сервера дистанционного управления;
На ФИГ. 4 изображена схема, иллюстрирующая пример конфигурации устройства дистанционного управления;
На ФИГ. 5 дано схематическое изображение примера блока ввода команд;
На ФИГ. 6A дано схематическое изображение примера ситуации, в которой транспортное средство проезжает светофор на прямой дороге;
На ФИГ. 6B дано схематическое изображение примера ситуации, в которой транспортное средство начинает менять одну полосу движения на другую;
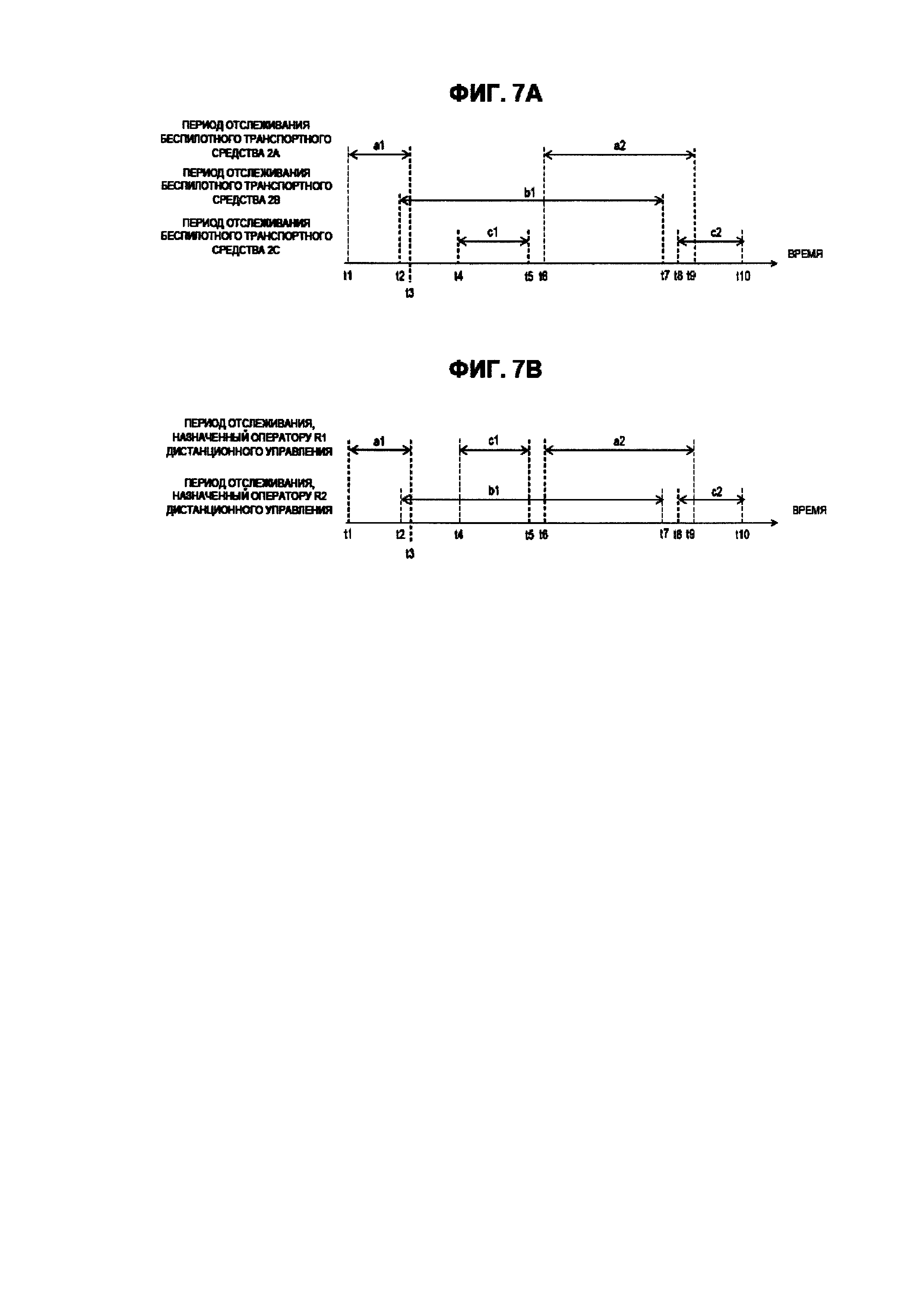
На ФИГ. 7A дано схематическое изображение примера периодов отслеживания трех беспилотных транспортных средств;
На ФИГ. 7B дано схематическое изображение примера графика отслеживания двух операторов дистанционного управления;
На ФИГ. 8A показан пример изображения для передачи графика отслеживания оператору дистанционного управления;
На ФИГ. 8B показан другой пример изображения для передачи графика отслеживания оператору дистанционного управления;
На ФИГ. 9 показан пример детализированного отображения;
На ФИГ. 10 изображена диаграмма, описывающая допустимое время отмены;
На ФИГ. 11A изображена блок-схема, показывающая один из примеров процесса назначения графика отслеживания;
На ФИГ. 11B изображена блок-схема, показывающая один из примеров настройки начала отслеживания;
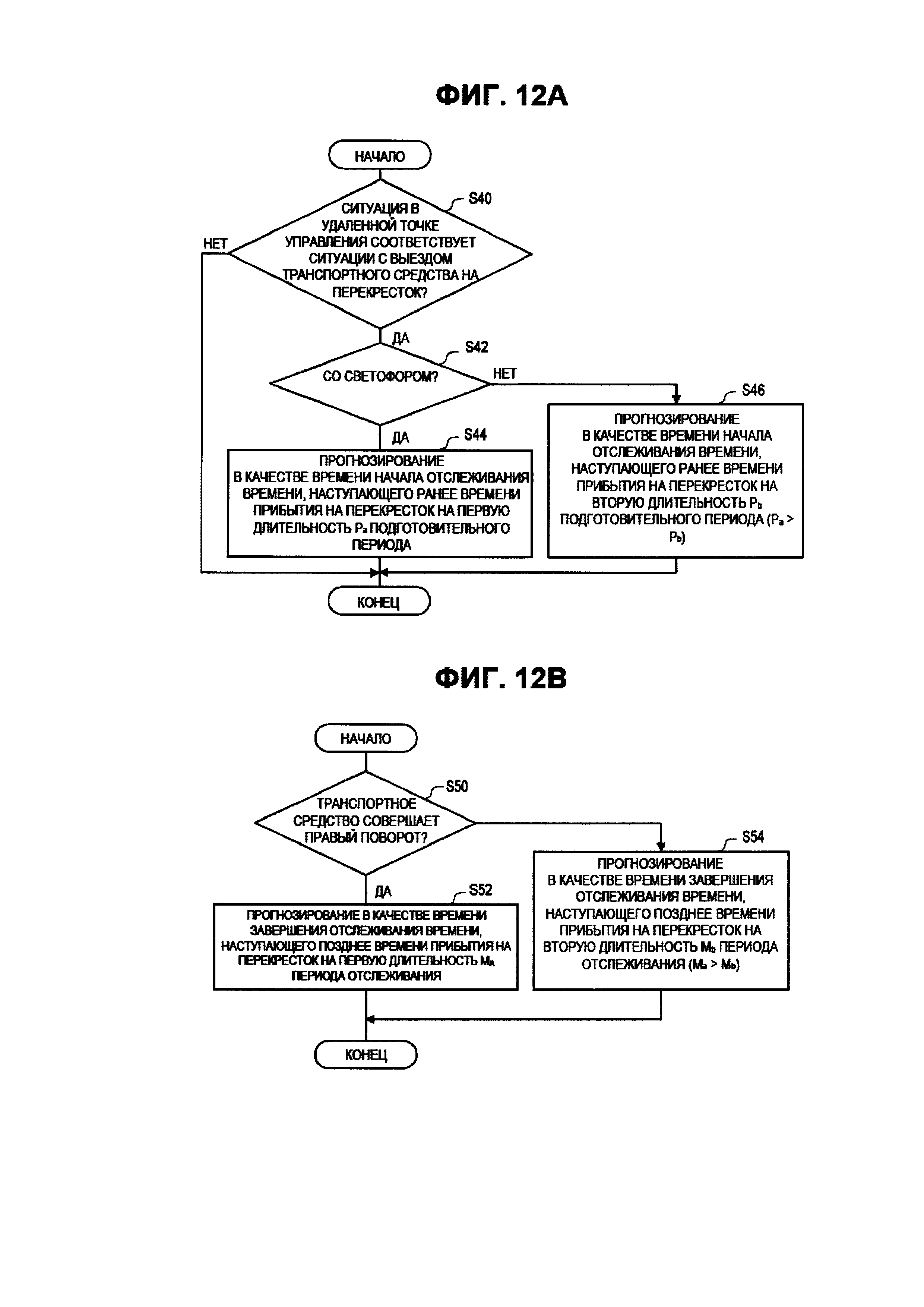
На ФИГ. 12A изображена блок-схема, показывающая один из примеров прогнозирования времени начала отслеживания;
На ФИГ. 12B изображена блок-схема, показывающая один из примеров прогнозирования времени завершения отслеживания;
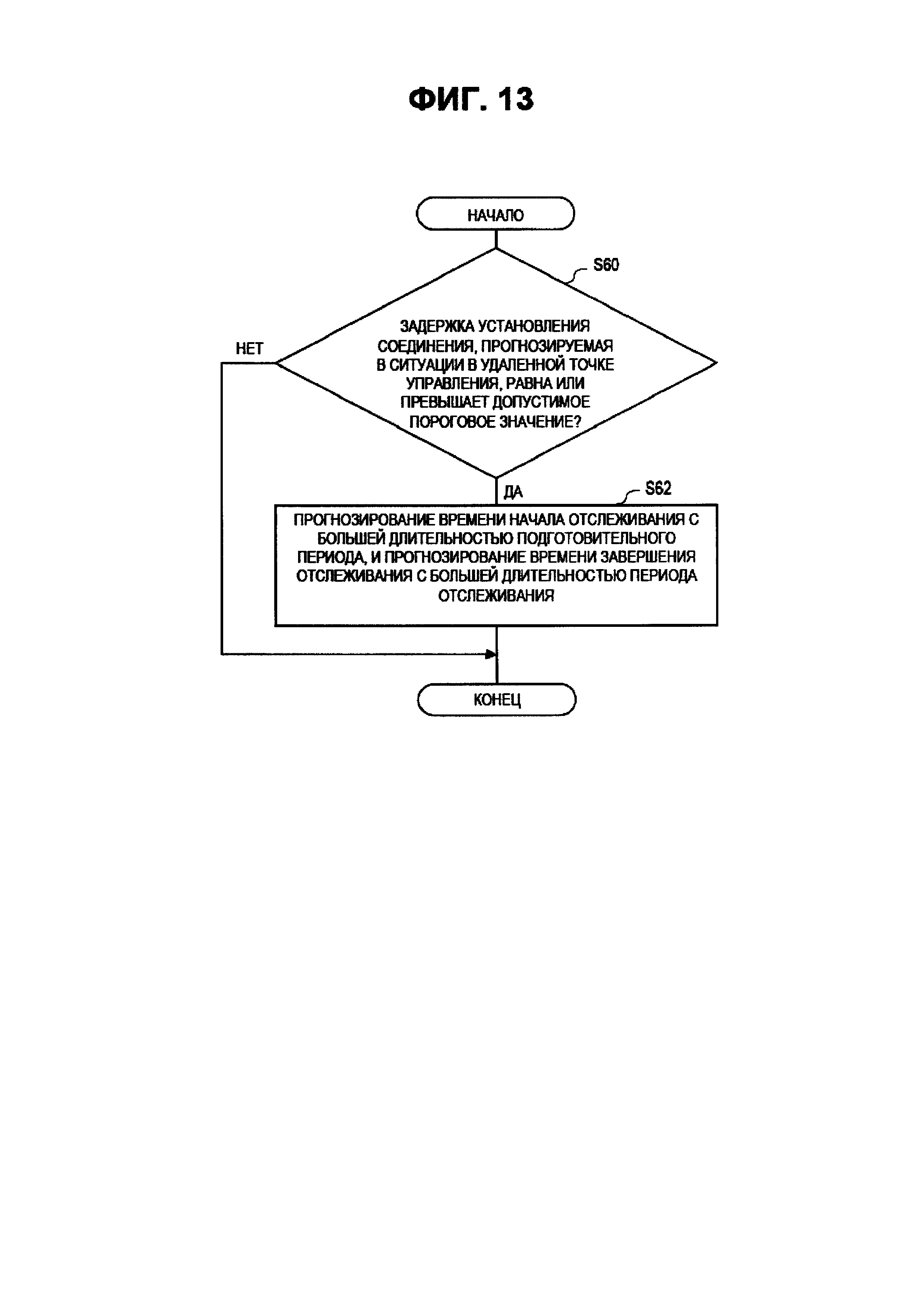
На ФИГ. 13 изображена блок-схема, показывающая один из примеров отражения задержки обмена информацией;
На ФИГ. 14A изображена блок-схема, показывающая один из примеров процесса назначения допустимого времени отмены;
На ФИГ. 14B изображена блок-схема, показывающая один из примеров процесса передачи команды отмены;
На ФИГ. 15 изображена схема, иллюстрирующая пример устройства дистанционного управления в соответствии со вторым примером осуществления изобретения;
На ФИГ. 16 изображена блок-схема, показывающая один из примеров процесса процедуры замены оператора дистанционного управления;
На ФИГ. 17 изображена схема, иллюстрирующая пример устройства дистанционного управления в соответствии с третьим примером осуществления изобретения;
На ФИГ. 18 представлен вид сверху одного примера целевых маршрутов трех беспилотных транспортных средств 2A, 2B, 2C;
На ФИГ. 19 изображен график, отображающий план скорости движения беспилотного транспортного средства 2A, график, отображающий план скорости движения беспилотного транспортного средства 2B, график, отображающий план скорости движения беспилотного транспортного средства 2C, и график, отображающий периоды отслеживания беспилотных транспортных средств 2A, 2B, 2C;
На ФИГ. 20 изображен график, отображающий измененный план скорости движения беспилотного транспортного средства 2A, график, отображающий измененный план скорости движения беспилотного транспортного средства 2B, график, отображающий план скорости движения беспилотного транспортного средства 2C, и график, отображающий измененные периоды отслеживания беспилотных транспортных средств 2A, 2B и 2C;
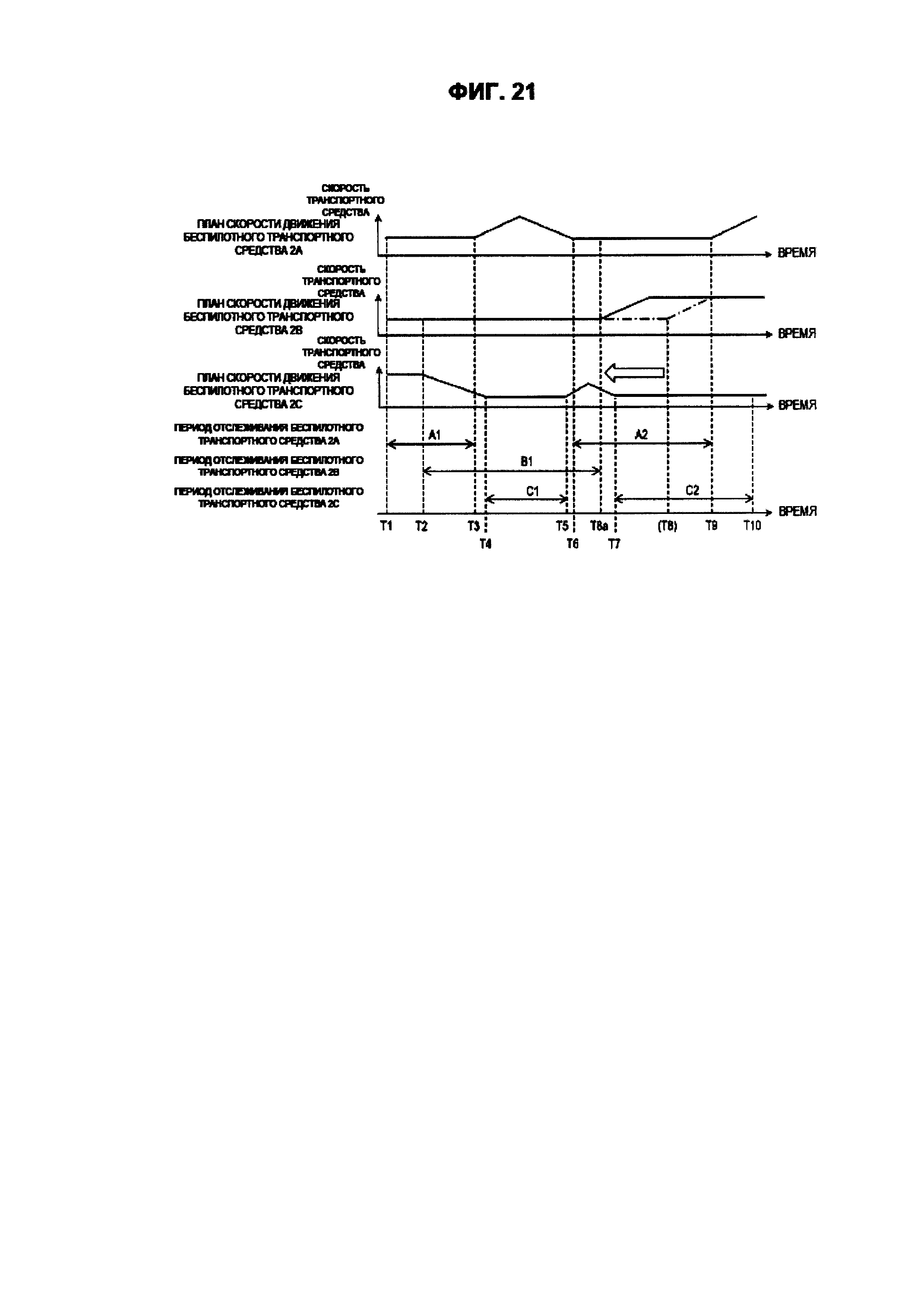
На ФИГ. 21 изображен график, отображающий план скорости движения беспилотного транспортного средства 2A, график, отображающий измененный план скорости движения беспилотного транспортного средства 2B, график, отображающий план скорости движения беспилотного транспортного средства 2C, и график, отображающий измененные периоды отслеживания беспилотных транспортных средств 2A, 2B и 2C;
На ФИГ. 22 представлен вид сверху, описывающий один пример изменения целевого маршрута; и
На ФИГ. 23 изображена блок-схема, иллюстрирующая пример определения количества перекрытий периодов.
ПОДРОБНОЕ РАСКРЫТИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0015] Ниже по тексту будут раскрыты некоторые примеры осуществления настоящего изобретения со ссылкой на прилагаемые фигуры.
Первый пример осуществления изобретения
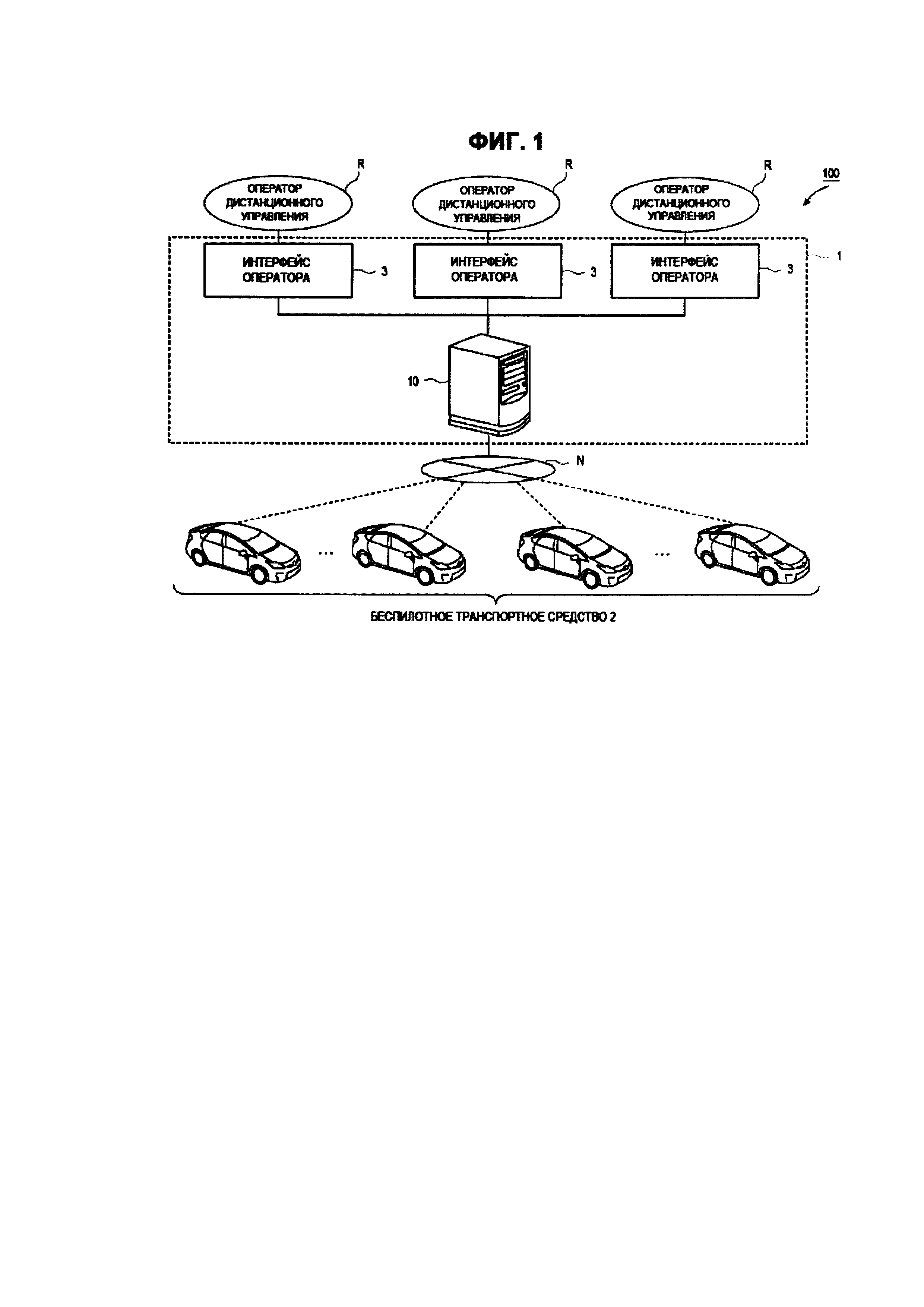
[0016] На ФИГ. 1 изображена схема, иллюстрирующая пример системы дистанционного управления транспортным средством в соответствии с первым примером осуществления. Система 100 дистанционного управления, показанная на ФИГ. 1, подает команды дистанционного управления для беспилотного транспортного средства 2 через оператора R дистанционного управления. Команда дистанционного управления — это указания оператора R дистанционного управления, относящиеся к движению беспилотного транспортного средства 2.
[0017] Команда дистанционного управления содержит команду на движение беспилотного транспортного средства 2 и команду на остановку беспилотного транспортного средства 2. Команда дистанционного управления может содержать команду на перестроение беспилотного транспортного средства 2 из одной полосы в другую. Кроме того, команда дистанционного управления может содержать команду, предотвращающую столкновение c препятствием, находящимся перед транспортным средством при движении в сторону, команду на обгон движущегося впереди транспортного средства, команду эвакуации в экстренном случае и т.п. Команда дистанционного управления может также содержать команду посадки или высадки пассажира из беспилотного транспортного средства 2 (например, команду автоматического открытия и закрытия двери или команду начала голосового инструктажа по выходу из транспортного средства).
Конфигурация системы дистанционного управления транспортным средством в соответствии с первым примером осуществления изобретения
[0018] Как показано на ФИГ. 1, система 100 дистанционного управления транспортным средством содержит устройство 1 дистанционного управления, в которое оператор R дистанционного управления вводит команду дистанционного управления. Устройство 1 дистанционного управления соединено с возможностью передачи данных с несколькими беспилотными транспортными средствами 2 через сеть N. Сеть N представляет собой беспроводную сеть передачи данных. Различная информация передается с беспилотного транспортного средства 2 на устройство 1 дистанционного управления.
[0019] В системе 100 дистанционного управления транспортным средством, например, у оператора R дистанционного управления запрашивают ввод команды дистанционного управления в ответ на запрос команды управления от беспилотного транспортного средства 2. Оператор R дистанционного управления вводит команду дистанционного управления в интерфейс 3 устройства 1 дистанционного управления. Устройство 1 дистанционного управления передает команду дистанционного управления на беспилотное транспортное средство 2 по сети N. Беспилотное транспортное средство 2 движется автономно в соответствии с полученной командой дистанционного управления.
[0020] В системе 100 дистанционного управления транспортным средством может быть предусмотрено несколько операторов R дистанционного управления. Может быть предусмотрено от двух до или нескольких десятков операторов R дистанционного управления. Количество беспилотных транспортных средств 2, которые могут обмениваться данными с системой 100 дистанционного управления транспортным средством, по существу, не ограничено при условии, что оно также больше единицы. Несколько операторов R дистанционного управления могут поочередно передавать команды дистанционного управления на одно беспилотное транспортное средство 2, или же один оператор R дистанционного управления может передавать команды дистанционного управления, по меньшей мере, двум беспилотным транспортным средствам 2.
Конфигурация беспилотного транспортного средства
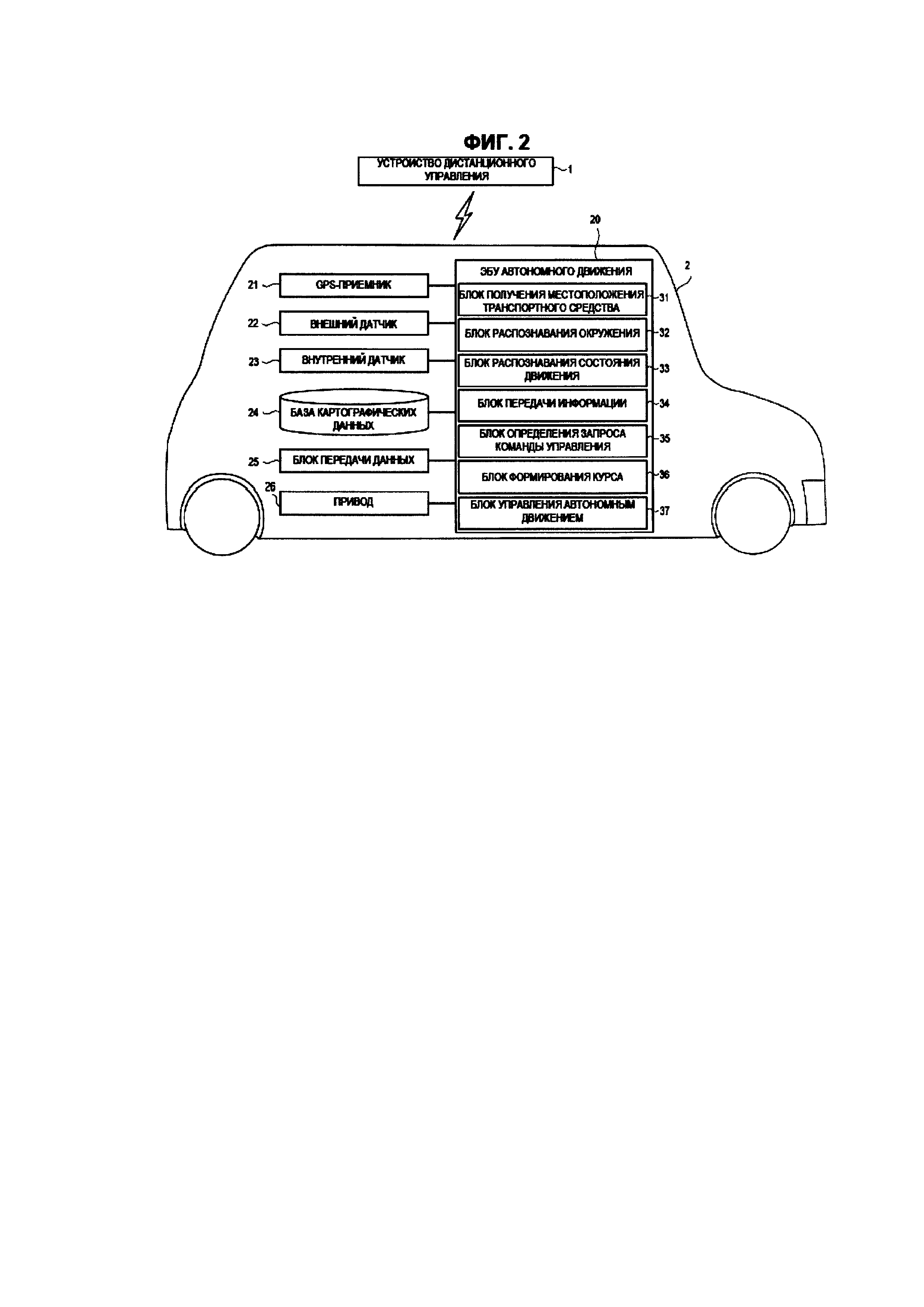
[0021] Один из примеров конфигурации беспилотного транспортного средства 2 описан ниже. На ФИГ. 2 изображена схема, иллюстрирующая пример конфигурации беспилотного транспортного средства 2. Как показано на ФИГ. 2, беспилотное транспортное средство 2 содержит, в частности, ЭБУ 20 автономного движения. ЭБУ 20 автономного движения представляет собой электронный блок управления, содержащий центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ) и прочие компоненты. В ЭБУ 20 автономного движения, например, программа, записанная в ПЗУ, загружается в ОЗУ, и различные функции реализуются путем выполнения программы, загруженной в ОЗУ через ЦП. ЭБУ 20 автономного движения может содержать несколько электронных блоков.
[0022] ЭБУ 20 автономного движения соединен с GPS-приемником 21, внешним датчиком 22, внутренним датчиком 23, базой 24 картографических данных, блоком 25 передачи данных и приводом 26.
[0023] GPS-приемник 21 определяет местоположение беспилотного транспортного средства 2 (например, широту и долготу беспилотного транспортного средства 2) путем приема сигналов, по меньшей мере, с трех спутников GPS. GPS-приемник 21 передает найденную информацию о местоположении беспилотного транспортного средства 2 на ЭБУ 20 автономного движения.
[0024] Внешний датчик 22 представляет собой встроенный в транспортное средство датчик, распознающий окружение беспилотного транспортного средства 2. Внешний датчик 22 представляет собой, по меньшей мере, камеру. Камера представляет собой устройство формирования изображения, захватывающее изображение окружения беспилотного транспортного средства 2. Камера может быть установлена, например, за лобовым стеклом беспилотного транспортного средства 2 и захватывать изображение перед транспортным средством. Камера передает видеоинформацию об окружении беспилотного транспортного средства 2 на ЭБУ 20 автономного движения. Камера может представлять собой монокулярную камеру или стереокамеру. В дополнение к изображениям окружения перед транспортным средством может быть предусмотрено несколько камер, захватывающих изображения окружения слева, справа и сзади беспилотного транспортного средства 2.
[0025] Беспилотное транспортное средство 2 может быть оснащено внешней камерой для оператора дистанционного управления. Внешняя камера для оператора дистанционного управления захватывает, по меньшей мере, изображение окружения перед беспилотным транспортным средством 2. Внешняя камера для оператора дистанционного управления может содержать несколько камер, захватывающих изображение окружения, в том числе окружения с боков и позади беспилотного транспортного средства 2. Внешняя камера для оператора дистанционного управления может быть сконфигурирована для получения изображений в направлении движения беспилотного транспортного средства 2 (включая направление движения задним ходом) или направлении, в котором будет двигаться транспортное средство. Направление, в котором будет двигаться транспортное средство, может представлять собой, например, направление заднего хода беспилотного транспортного средства 2 при переводе переключателя АКПП из положения D в положение R.
[0026] Внешний датчик 22 может представлять собой радиолокационный датчик. Под радиолокационным датчиком понимают устройство обнаружения, обнаруживающее объекты в зоне вокруг беспилотного транспортного средства 2 с использованием радиоволн (например, миллиметровых волн) или света. Радиолокационный датчик может представлять собой, например, миллиметровый радар или лазерный локатор (LIDAR). Радиолокационный датчик передает электрическую волну или свет в окружение беспилотного транспортного средства 2 и распознает объект, принимая отраженную от него электрическую волну или свет. Радиолокационный датчик передает информацию об обнаруженном объекте в ЭБУ 20 автономного движения. Под объектами понимают, в частности, неподвижные объекты, в частности, ограждения и здания, и движущиеся объекты, в частности, пешеходов, велосипеды и другие транспортные средства. Кроме того, внешний датчик 22 может представлять собой сонар, распознающий звук вне беспилотного транспортного средства 2.
[0027] Внутренний датчик 23 представляет собой встроенный в транспортное средство датчик, распознающий состояние движения беспилотного транспортного средства 2. Внутренний датчик 23 представляет собой датчик скорости транспортного средства, датчик ускорения и датчик скорости рыскания. Датчик скорости транспортного средства представляет собой детектор, определяющий скорость беспилотного транспортного средства 2. В качестве датчика скорости движения транспортного средства можно использовать датчик частоты вращения колеса, установленный на колесо беспилотного транспортного средства 2 или на приводной вал, вращающийся вместе с колесом, и определяющий частоту вращения каждого колеса. Датчик скорости транспортного средства передает полученную информацию о скорости транспортного средства (информацию о частоте вращения колес) в ЭБУ 20 автономного движения.
[0028] Датчиком ускорения представляет собой детектор, определяющий ускорение беспилотного транспортного средства 2. Датчик ускорения может представлять собой, например, датчик продольного ускорения, распознающий продольное ускорение беспилотного транспортного средства 2. Датчик ускорения может представлять собой датчик поперечного ускорения, распознающий поперечное ускорение беспилотного транспортного средства 2. Датчик ускорения может, например, передавать информацию об ускорении беспилотного транспортного средства 2 в ЭБУ 20 автономного движения. Датчик скорости рыскания представляет собой детектор, определяющий скорость рыскания (угловую скорость вращения) вокруг вертикальной оси в центре тяжести беспилотного транспортного средства 2. Например, в качестве датчика скорости рыскания может использоваться гироскопический датчик. Датчик скорости рыскания передает информацию о скорости рыскания беспилотного транспортного средства 2 в ЭБУ 20 автономного движения.
[0029] База 24 картографической информации записывает картографическую информацию. База 24 картографической информации может быть сформирована, например, в записывающем устройстве, в частности, на жестком диске (HDD), установленном на беспилотном транспортном средстве 2. Картографическая информация содержит информацию о расположении и форме дорог (например, кривизне), а также информацию о расположении перекрестка или примыкания. Картографическая информация может содержать информацию об ограничениях движения, например, о разрешенной максимальной скорости, связанную с информацией о местоположении. Картографическая информация может содержать информацию об ориентирах, используемую для получения информации о местоположении беспилотного транспортного средства 2. Ориентирами могут являться дорожные знаки, дорожная разметка, светофоры, телефонные столбы и т.п. Картографическая информация может содержать информацию о расположении автобусных остановок. База 24 картографической информации может быть реализована в виде сервера, способного обмениваться данными с беспилотным транспортным средством 2.
[0030] Блок 25 передачи данных представляет собой устройство обмена данными, управляющее беспроводным обменом данными с окружением беспилотного транспортного средства 2. Блок 25 передачи данных передает различную информацию на устройство 1 дистанционного управления (сервера 10 дистанционного управления) и принимает ее с него по сети N.
[0031] Привод 26 представляет собой устройство, используемое для управления беспилотным транспортным средством 2. Привод 26 содержит, по меньшей мере, исполнительный механизм движения, привод тормозного механизма и привод рулевого управления. Исполнительный механизм движения управляет количеством воздуха, подаваемого в двигатель (степенью открытия дроссельной заслонки), в соответствии с управляющим сигналом ЭБУ 20 автономного движения, что позволяет управлять силой тяги беспилотного транспортного средства 2. Если беспилотное транспортное средство 2 является гибридным, управляющий сигнал от ЭБУ 20 автономного движения поступает на двигатель, служащий источником энергии, дополнительно к количеству поступающего в двигатель воздуха для управления силой тяги. Если беспилотное транспортное средство 2 является электрическим, управляющий сигнал от ЭБУ 20 автономного движения поступает на двигатель, служащий источником энергии, для управления силой тяги. В этих случаях двигатель как источник энергии выступает в качестве привода 26.
[0032] Привод тормозного механизма управляет тормозной системой в соответствии с управляющим сигналом ЭБУ 20 автономного движения и регулирует тормозное усилие, прилагаемое к колесам беспилотного транспортного средства 2. Тормозная система может представлять собой гидравлическую тормозную систему. Привод рулевого управления управляет сервоприводом, развивающим крутящий момент электрической системы рулевого управления, в соответствии с управляющим сигналом ЭБУ 20 автономного движения. Соответственно, привод рулевого управления управляет моментом поворота управляемых колес беспилотного транспортного средства 2.
[0033] Один из примеров функциональной конфигурации ЭБУ 20 автономного движения описан ниже. ЭБУ 20 автономного движения содержит блок 31 получения местоположения транспортного средства, блок 32 распознавания окружения, блок 33 распознавания состояния движения, блок 34 передачи информации, блок 35 определения запроса команды управления, блок 36 формирования курса и блок 37 управления автономным движением. Часть функций ЭБУ 20 автономного движения может выполняться сервером, выполненным с возможностью обмена данными с беспилотным транспортным средством 2.
[0034] Блок 31 получения местоположения транспортного средства получает информацию о местоположении (положении на карте) беспилотного транспортного средства 2 на основании информации о местоположении от GPS-приемника 21 и картографической информации базы 24 данных. Блок 31 получения местоположения транспортного средства может получать информацию об ориентирах вокруг беспилотного транспортного средства 2, используя технологию одновременной локализации и картирования (SLAM), информацию об ориентирах, включенную в картографическую информацию базы 24 данных и показания внешнего датчика 22. Блок 31 получения местоположения транспортного средства может распознавать боковое местоположение беспилотного транспортного средства 2 относительно полосы движения (местоположение беспилотного транспортного средства 2 в поперечном направлении полосы движения), руководствуясь взаимным расположением разметки полосы движения и беспилотного транспортного средства 2, и может включать такое боковое местоположение в информацию о местоположении. Блок 31 получения местоположения транспортного средства может также получать информацию о местоположении беспилотного транспортного средства 2 другими известными способами.
[0035] Блок 32 распознавания окружения распознает окружение беспилотного транспортного средства 2 на основании показаний внешнего датчика 22. Окружение включает в себя местоположение внешнего объекта относительно беспилотного транспортного средства 2. Окружение может включать относительную скорость и направление движения внешнего объекта относительно беспилотного транспортного средства 2. Окружение может включать типы объектов, в частности, другие транспортные средства, пешеходов и велосипеды. Тип объекта может быть идентифицирован известным способом, в частности, — путем сравнения с образцом. Окружение может включать результаты распознавания разметки полосы движения вокруг беспилотного транспортного средства 2 (распознавание белой линии). Окружение может включать результаты распознавания сигналов светофоров. Блок 32 распознавания окружения может распознавать сигналы светофоров перед беспилотным транспортным средством 2 (независимо от того, проезжает ли транспортное средство светофор) на основании, например, изображений, полученных камерой внешнего датчика 22.
[0036] Блок 33 распознавания состояния движения распознает состояние движения беспилотного транспортного средства 2 на основании показаний внутреннего датчика 23. Состояние движения включает скорость беспилотного транспортного средства 2, ускорение беспилотного транспортного средства 2 и скорость рыскания беспилотного транспортного средства 2. В частности, блок 33 распознавания состояния движения определяет скорость беспилотного транспортного средства 2 на основании информации, полученной от датчика скорости транспортного средства. Блок 33 распознавания состояния движения определяет ускорение беспилотного транспортного средства 2 на основании информации, полученной от датчика ускорения. Блок 33 распознавания состояния движения определяет ориентацию беспилотного транспортного средства 2 на основании информации, полученной от датчика скорости рыскания.
[0037] Блок 34 передачи информации передает информацию об автономном движении, то есть информацию об автономном движении беспилотного транспортного средства 2, на устройство 1 дистанционного управления через блок 25 обмена данными. Информация об автономном движении включает информацию о местоположении беспилотного транспортного средства 2 и целевой маршрут беспилотного транспортного средства 2. Под целевым маршрутом понимают маршрут, по которому автономно движется беспилотное транспортное средство 2. Формирование целевого маршрута будет описано ниже.
[0038] Информация об автономном движении может включать план скорости транспортного средства на целевом маршруте беспилотного транспортного средства 2. В план скорости транспортного средства входят данные о скорости (профиле скорости транспортного средства), используемые для управления скоростью движения беспилотного транспортного средства 2 во время автономного движения. План скорости транспортного средства будет в подробностях описан ниже. Информация об автономном движении может включать окружение беспилотного транспортного средства 2, распознанное блоком 32 распознавания окружения, и / или состояние движения беспилотного транспортного средства 2, распознанное блоком 33 распознавания состояния движения.
[0039] Блок 34 передачи информации передает информацию об автономном движении на устройство 1 дистанционного управления, например, когда беспилотное транспортное средство 2 начинает автономное движение. Во время автономного движения блок 34 передачи информации передает информацию об автономном движении в заранее заданное время. Заранее заданное время, по существу, не ограничено и может быть любым. Блок 34 передачи информации может передавать информацию через регулярные промежутки времени или после преодоления беспилотным транспортным средством 2 определенного расстояния. Если блок 34 передачи информации один раз передал целевой маршрут, то информацию о целевом маршруте не нужно передавать повторно до тех пор, пока целевой маршрут не будет изменен.
[0040] Блок 35 определения запроса команды управления определяет, должно ли беспилотное транспортное средство 2 запрашивать у оператора R дистанционного управления (устройства 1 дистанционного управления) команду дистанционного управления. Блок 35 определения запроса команды управления определяет необходимость запроса команды дистанционного управления, основываясь на информации о местоположении беспилотного транспортного средства 2, полученной блоком 31 получения местоположения транспортного средства, по меньшей мере, вместе с картографической информацией базы 24 данных, информацией об окружении, полученной блоком 32 распознавания окружения, и курсом, полученным блоком 36 формирования курса, описанным ниже.
[0041] Блок 35 определения запроса команды управления определяет необходимость запроса команды управления, например, если беспилотное транспортное средство 2 находится в одной из ситуаций в удаленной точке управления. Ситуации, относящиеся к ситуациям в удаленной точке управления заранее задаются в качестве ситуаций, в которых беспилотное транспортное средство должно запрашивать команду дистанционного управления от устройства 1 дистанционного управления.
[0042] Ситуация в удаленной точке управления представляет собой, по меньшей мере, одну из следующих ситуаций: беспилотное транспортное средство 2 совершает правый поворот на перекрестке (если не оговорено иначе, рассматривается ситуация в стране с левосторонним движением), беспилотное транспортное средство 2 въезжает на перекресток со светофорами или без них, беспилотное транспортное средство 2 проезжает под светофор (например, беспилотное транспортное средство 2 проезжает под светофоры, регулирующие пешеходный переход на дороге), беспилотное транспортное средство 2 начинает менять полосу движения, беспилотное транспортное средство 2 въезжает на строительную площадку, беспилотное транспортное средство 2 въезжает на железнодорожный переезд, беспилотное транспортное средство 2 останавливается на остановке для беспилотного автобуса, отправленное беспилотное транспортное средство 2 останавливается в пункте посадки пассажиров или пункте назначения. Если транспортное средство находится в стране или регионе с правосторонним движением, ситуацией в удаленной точке управления является левый поворот на перекрестке, а не правый. Ситуация в удаленной точке управления может представлять собой ситуацию, в которой беспилотное транспортное средство 2 заезжает задним ходом на парковочное место (парковка задним ходом).
[0043] Блок 35 определения запроса команды управления определяет необходимость запроса команды управления, например, если беспилотное транспортное средство 2 выезжает на перекресток или совершает правый поворот. Блок 35 определения запроса команды управления может определять необходимость запроса команды управления, если беспилотное транспортное средство 2 начинает менять полосу движения для прибытия в пункт назначения. Блок 35 определения запроса команды управления может определять необходимость запроса команды управления, если перед беспилотным транспортным средством имеется препятствие, столкновения с которым беспилотное транспортное средство 2 должно избежать.
[0044] Блок 35 определения запроса команды управления может распознавать ситуацию, в которой беспилотное транспортное средство 2 совершает правый поворот на перекрестке, выезжает на перекресток со светофорами, или начинает менять полосу движения, например, по информации о местоположении беспилотного транспортного средства 2, картографической информации и целевому маршруту.
[0045] Если будет обнаружена необходимость запроса команды управления, блок 35 определения запроса команды управления запрашивает у сервера 10 дистанционного управления команду дистанционного управления, подаваемую оператором R дистанционного управления. Запрос команды управления может содержать, например, информацию, идентифицирующую беспилотное транспортное средство 2. Кроме того, блок 35 определения запроса команды управления может запросить команду дистанционного управления заблаговременно. Блок 35 определения запроса команды управления может определить необходимость запроса команды управления в том случае, если расстояние между перекрестком, к которому относится команда дистанционного управления, и беспилотным транспортным средством 2 равно или меньше определенного расстояния. Вместо расстояния можно использовать время до прибытия.
[0046] Если будет определена необходимость запроса команды управления, блок 35 определения запроса команды управления передает информацию о ситуации во время движения беспилотного транспортного средства 2 на сервер 10 дистанционного управления. Информация о ситуации во время движения беспилотного транспортного средства 2 включает информацию, с помощью которой оператор R дистанционного управления может распознавать ситуацию, в которой находится беспилотное транспортное средство 2. Информация о ситуации во время движения может быть, например, более подробной, чем информация об автономном движении.
[0047] В частности, информация о ситуации во время движения беспилотного транспортного средства 2 включает информацию, полученную встроенным датчиком беспилотного транспортного средства 2 и/или информацию, получаемую из определяемой информации, касающейся беспилотного транспортного средства 2 (например, вид сверху беспилотного транспортного средства 2). Информация, полученная встроенным датчиком, может содержать, например, изображение окружения перед беспилотным транспортным средством 2, захваченное камерой беспилотного транспортного средства 2. Информация, полученная встроенным датчиком, может содержать захваченные изображения окружения беспилотного транспортного средства 2, в том числе сбоку и сзади. Кроме того, информация, полученная встроенным датчиком, может содержать информацию об объектах, обнаруженных радиолокационным датчиком внешнего датчика 22. Информация, полученная встроенным датчиком, может содержать результат идентификации типа объекта. Блок 35 определения запроса команды управления может использовать информацию об окружении беспилотного транспортного средства 2, полученную блоком 32 распознавания окружения, в качестве информации, полученной встроенным датчиком.
[0048] Кроме того, информация, полученная встроенным датчиком, может содержать информацию о скорости беспилотного транспортного средства 2, полученную датчиком скорости в составе внутреннего датчика 23. Информация, полученная встроенным датчиком, может содержать информацию о скорости рыскания беспилотного транспортного средства 2, полученную датчиком скорости рыскания в составе внутреннего датчика 23. Информация, полученная встроенным датчиком, может содержать информацию об угле поворота рулевых колес беспилотного транспортного средства 2. Блок 35 определения запроса команды управления может использовать информацию о состоянии движения беспилотного транспортного средства 2, полученную блоком 33 распознавания состояния движения, в качестве информации, полученной встроенным датчиком.
[0049] Кроме того, информация о ситуации во время движения беспилотного транспортного средства 2 может содержать информацию о местоположении беспилотного транспортного средства 2. Информация о ситуации во время движения беспилотного транспортного средства 2 может содержать информацию о пассажирах (наличии или отсутствии пассажиров или их количестве). Информация о ситуации во время движения беспилотного транспортного средства 2 может содержать информацию о курсе, выбранном в ответ на команду дистанционного управления от оператора R дистанционного управления, допускающую различные варианты. Описание курса будет дано ниже.
[0050] Блок 36 формирования курса формирует курс (траекторию), используемый для автономного движения беспилотного транспортного средства 2. Блок 36 формирования курса формирует курс автономного движения на основании заранее заданного целевого маршрута, картографической информации, информации о местоположении беспилотного транспортного средства 2, окружения беспилотного транспортного средства 2 и состояния движения беспилотного транспортного средства 2. Курс соответствует плану автономного движения.
[0051] В курс входит путь, по которому транспортное средство движется в режиме автономного движения, и план скорости транспортного средства в режиме автономного движения. Путь представляет собой траекторию, вдоль которой транспортное средство самостоятельно движется по целевому маршруту. Путь может представлять собой, например, данные (план угла поворота рулевых колес), связанные с изменением угла поворота беспилотного транспортного средства 2 в зависимости от положения на целевом маршруте. Положение на целевом маршруте может представлять собой, например, набор назначенных местоположений на маршруте с заранее определенными интервалами (например, 1 м) в направлении движения по заданному маршруту. План угла поворота рулевого колеса содержит данные, описывающие связь целевого угла поворота рулевого колеса с каждым назначенным местоположением на маршруте.
[0052] Целевой маршрут может быть назначен на основании, например, пункта назначения, картографической информации и информации о местоположении беспилотного транспортного средства 2. Целевой маршрут может быть назначен с учетом информации о дорожной обстановке, например, о заторах. Целевой маршрут может быть назначен известной навигационной системой. Пункт назначения может быть назначен пассажиром беспилотного транспортного средства 2 или автоматически предложен ЭБУ 20 автономного движения или навигационной системой.
[0053] Блок 36 формирования курса формирует путь, по которому будет двигаться беспилотное транспортное средство 2, например, на основании целевого маршрута, картографической информации, окружения беспилотного транспортного средства 2 и состояния движения беспилотного транспортного средства 2. Блок 36 формирования курса определяет траекторию таким образом, чтобы, например, беспилотное транспортное средство 2 двигалось по центру полосы, входящей в целевой маршрут (центр в поперечном направлении).
[0054] План скорости транспортного средства содержит данные, описывающие, например, связь скорости целевого транспортного средства с каждым назначенным местоположением на маршруте. Кроме того, назначенное местоположение на маршруте может быть назначено на основании времени движения, а не расстояния, на которое перемещается беспилотное транспортное средство 2. Назначенное местоположение на маршруте может быть назначено, например, как местоположение, в котором транспортное средство будет находиться через одну или две секунды. В этом случае план скорости транспортного средства может быть также выражен в виде данных, соответствующих времени движения.
[0055] Блок 36 формирования курса может составить план скорости транспортного средства, основываясь, например, на информации об ограничениях движения, в частности, пути и максимально разрешенной скорости, входящих в картографическую информацию. Вместо максимально разрешенной скорости можно использовать заданную скорость для местоположения или области на карте. Если беспилотное транспортное средство 2 является беспилотным автобусом, блок 36 формирования курса может составлять план скорости транспортного средства на основании плана обслуживания, включая время прибытия на каждую автобусную остановку с учетом времени нахождения на автобусной остановке. Блок 36 формирования курса определяет курс автономного движения на основании пути и плана скорости транспортного средства. Способ определения курса в блоке 36 формирования курса, по существу, не ограничивается описанным выше способом; допускается использование других известных способов, связанных с автономным движением. То же самое применимо собственно к курсу.
[0056] Блок 36 формирования курса может заблаговременно определять курс в ответ на команду дистанционного управления, если блок 35 определения запроса команды управления запрашивает у сервера 10 дистанционного управления команду дистанционного управления, или беспилотное транспортное средство 2 приближается к перекрестку, к которому относится команда дистанционного управления. Содержание команды дистанционного управления определяется заблаговременно в зависимости от ситуации, в которой находится беспилотное транспортное средство 2. Например, если транспортное средство совершает правый поворот на перекрестке, команда дистанционного управления может содержать команду «продолжить (начать правый поворот)» и команду «остановиться (ожидать определения)». Если транспортное средство совершает правый поворот на перекрестке, команда дистанционного управления содержит команду для проезда прямо без поворота направо (команда изменения маршрута) или команду экстренной высадки.
[0057] Например, блок 36 формирования курса в ситуации, когда беспилотное транспортное средство 2 совершает правый поворот на перекрестке, может выбирать курс, при котором беспилотное транспортное средство 2 совершает правый поворот на перекрестке в соответствии с командой дистанционного управления начать поворот направо. Блок 36 формирования курса может обновлять маршрут в соответствии с изменениями окружения до тех пор, пока не будет получена команда дистанционного управления. Кроме того, при поступлении команды дистанционного управления на изменение правого поворота на проезд прямо через перекресток, блок 36 формирования курса может заблаговременно сформировать курс для движения прямо через перекресток.
[0058] При поступлении команды дистанционного управления на экстренную высадку блок 36 формирования курса может заблаговременно предусмотреть экстренную высадку. Курс для экстренной высадки определяется таким образом, чтобы беспилотное транспортное средство 2 остановилось в одном из мест высадки, заранее установленных на карте. Блок 36 формирования курса распознает наличие препятствий в каждом месте высадки, например, на основании данных об окружении и формирует курс для экстренной высадки таким образом, чтобы остановить транспортное средство на пустом месте высадки. Блок 36 формирования курса не обязательно должен формировать курс заранее и может сформировать курс, соответствующий команде дистанционного управления, после получения соответствующей команды дистанционного управления.
[0059] Блок 37 управления автономным движением осуществляет автономное управление беспилотным транспортным средством 2. Блок 37 управления автономным движением может осуществлять автономное движение беспилотного транспортного средства 2 на основании, например, окружения беспилотного транспортного средства 2, состояния движения беспилотного транспортного средства 2 и курса, сформированного блоком 36 формирования курса. Блок 37 управления автономным движением осуществляет автономное движение беспилотного транспортного средства 2 путем передачи управляющего сигнала на привод 26.
[0060] Когда блок 35 определения запроса команды управления направляет запрос в сервер 10 дистанционного управления, блок 37 управления автономным движением ожидает получения команды дистанционного управления от сервера 10 дистанционного управления. При запросе команды дистанционного управления после остановки беспилотного транспортного средства 2 блок 37 управления автономным движением поддерживает транспортное средство в остановленном состоянии до получения команды дистанционного управления.
[0061] Если пассажир транспортного средства имеет водительские права, а команда дистанционного управления не поступила даже по истечении заранее заданного времени ожидания, блок 37 управления автономным движением может запросить определение управления или ручного управления пассажиром. Блок 37 управления автономным движением может автоматически выполнять экстренную высадку, если команда дистанционного управления не получена даже по истечении заранее заданного времени ожидания, и если определение управления или ручного управления невозможно (например, в отсутствие пассажира).
Конфигурация устройства дистанционного управления
[0062] Конфигурация устройства 1 дистанционного управления согласно настоящему примеру осуществления изобретения будет описана ниже с отсылкой к прилагаемым фигурам. Как показано на ФИГ. 1, устройство 1 дистанционного управления содержит сервер 10 дистанционного управления, интерфейс 3 оператора дистанционного управления и базу 4 данных операторов дистанционного управления.
[0063] Аппаратная конфигурация сервера 10 дистанционного управления будет описана ниже. На ФИГ. 3 изображена схема, иллюстрирующая пример аппаратной конфигурации сервера 10 дистанционного управления. Как показано на ФИГ. 3, сервер 10 дистанционного управления представляет собой компьютер, содержащий процессор 10a, записывающий блок 10b, блок 10c передачи данных и пользовательский интерфейс 10d. В этом случае под пользователем понимают пользователя (например, администратора) сервера 10 дистанционного управления.
[0064] Процессор 10a управляет сервером 10 дистанционного управления с помощью различных операционных систем. Процессор 10a представляет собой арифметическое устройство, в частности, центральный процессор, содержащий управляющее устройство, арифметическое устройство и регистрирующее устройство. Процессор 10a управляет совместно записывающим блоком 10b, блоком 10c передачи данных и пользовательским интерфейсом 10d. Записывающий блок 10b содержит, по меньшей мере, одно устройство из запоминающего устройства и устройства хранения данных. Запоминающее устройство представляет собой хранилище информации, в частности, ПЗУ или ОЗУ. Устройство хранения данных представляет собой носитель информации, например, жесткий диск.
[0065] Блок 10c передачи данных представляет собой коммуникационное устройство, осуществляющее связь через сеть N. Примерами блока 10c передачи данных являются сетевое устройство, сетевой контроллер и сетевая карта. Пользовательский интерфейс 10d представляет собой устройство ввода/вывода между сервером 10 дистанционного управления и пользователем, например, администратором. Пользовательский интерфейс 10d содержит устройство вывода, например, дисплей и динамик, и устройство ввода, например, сенсорный экран. Кроме того, сервер 10 дистанционного управления не обязательно должен находиться на объекте и может быть установлен на движущемся транспортном средстве, например, транспортном средстве.
[0066] На ФИГ. 4 изображена схема, иллюстрирующая пример конфигурации устройства 1 дистанционного управления. Как показано на ФИГ. 4, интерфейс 3 дистанционного управления представляет собой блок ввода/вывода устройства 1 дистанционного управления для оператора R дистанционного управления. Интерфейс 3 дистанционного управления содержит блок 3a вывода информации и блок 3b ввода команд.
[0067] Блок 3а вывода информации представляет собой устройство, передающее оператору R дистанционного управления информацию, используемую для дистанционного управления беспилотным транспортным средством 2. Блок 3a вывода информации содержит дисплей, на который выводится изображение, и динамик, обеспечивающий звук.
[0068] В качестве примера на дисплее отображается изображение окружения перед беспилотным транспортным средством 2 (изображение передней зоны), снятое камерой беспилотного транспортного средства 2. На дисплее может отображаться несколько экранов, а также изображения зон сбоку и/или сзади беспилотного транспортного средства 2. Варианты исполнения дисплея, по существу, не ограничены, при условии, что он способен предоставлять визуальную информацию оператору R дистанционного управления. Дисплей может представлять собой переносное устройство, устанавливаемое в зоне обзора оператора R дистанционного управления.
[0069] Динамик может представлять собой, например, динамик гарнитуры, установленной на голове оператора R дистанционного управления. Динамик уведомляет оператора R дистанционного управления голосом о ситуации беспилотного транспортного средства 2 (например, о ситуации с совершением правого поворота на перекрестке). Динамик не обязательно должен быть гарнитурой и может быть стационарным.
[0070] Блок 3а вывода информации может передавать информацию оператору R дистанционного управления путем вибрации. Блок 3а вывода информации может содержать, например, вибрационный привод, установленный на сиденье оператора R дистанционного управления. Блок 3а вывода информации может предупреждать вибрацией оператора R дистанционного управления, например, о приближении другого транспортного средства к беспилотному транспортному средству 2. Блок 3а вывода информации содержит вибрационный привод на левой и правой стороне сиденья и может приводить вибрационный привод в состояние вибрации со стороны, соответствующей направлению приближения другого транспортного средства. Кроме того, блок 3а вывода информации может содержать вибрационный привод, установленный на теле оператора R дистанционного управления. Блок 3а вывода информации может предоставлять оператору R дистанционного управления информацию путем вибрации привода, установленного на той стороне тела оператора, которая соответствует направлению приближения другого транспортного средства.
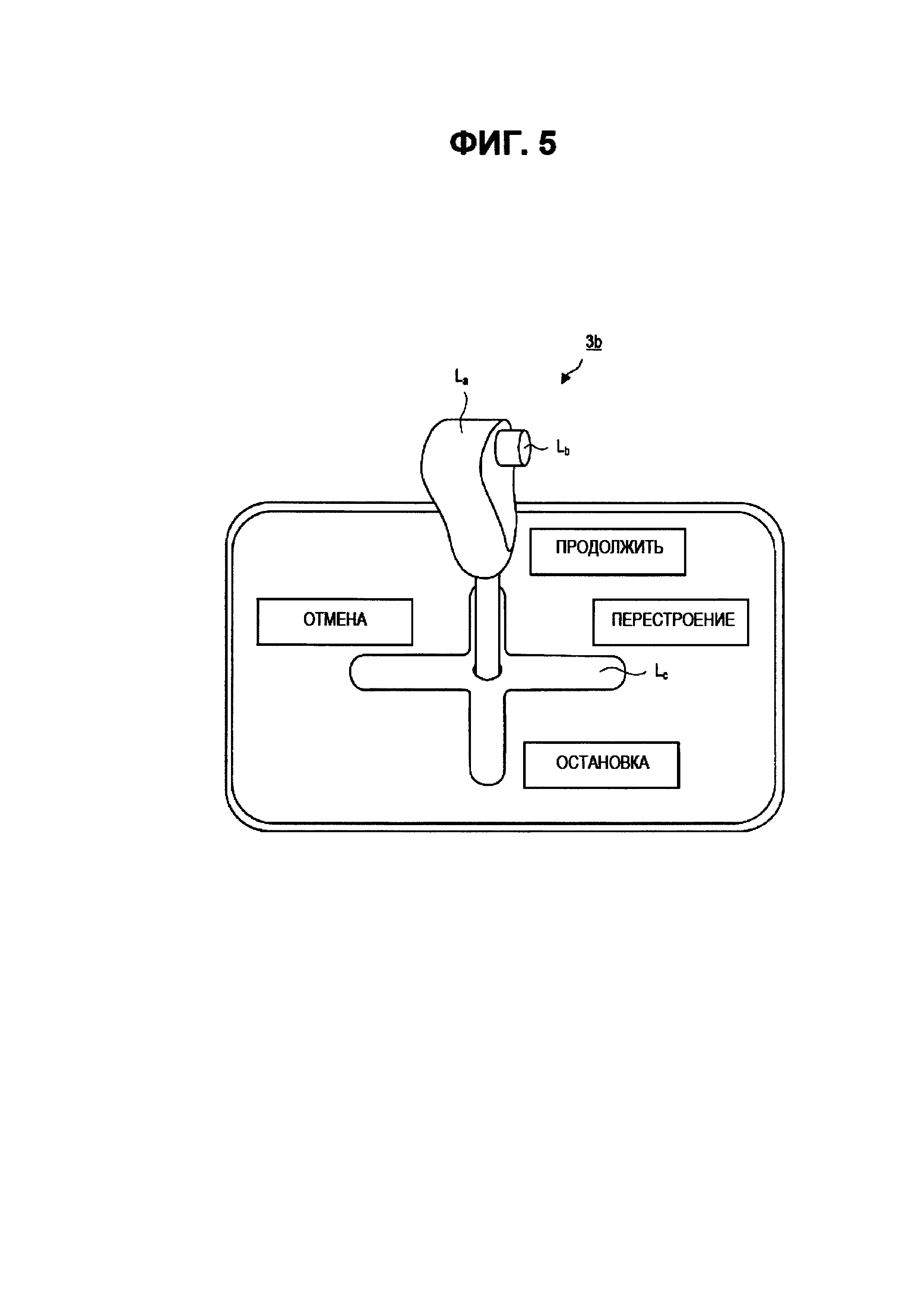
[0071] Блок 3b ввода команд представляет собой устройство, с помощью которого оператор R дистанционного управления вводит команду управления. На ФИГ. 5 изображен один из примеров блока 3b ввода команд. В блоке 3b ввода команд, показанном на ФИГ. 5, используется конструкция рычага заслонки отсечного типа. На ФИГ. 5 показан рычаг La, кнопка Lb запуска отслеживания и поперечный паз Lc.
[0072] Рычаг La приводится в действие оператором R дистанционного управления. Рычаг La содержит, например, ручку на верхнем конце и рукоятку, проходящую от ручки к поперечному пазу (поперечной заслонке) Lc. Кнопка Lb запуска отслеживания находится на боковой поверхности ручки рычага La. Расположение кнопки Lb запуска отслеживания, по существу, не ограничено; кнопка может располагаться с левой или правой стороны ручки. Кнопка Lb запуска отслеживания может быть установлена на той же поверхности, что и поперечный паз Lc.
[0073] Кнопка Lb запуска отслеживания нажимается, когда оператор R дистанционного управления начинает отслеживать ситуацию, в которой находится беспилотное транспортное средство 2. Устройство 1 дистанционного управления может определить, что оператор R дистанционного управления начал отслеживать транспортное средство по нажатию кнопки Lb запуска отслеживания. Кнопка Lb запуска отслеживания одновременно служит кнопкой разблокировки рычага La. То есть, рычаг La разблокирован и может перемещаться, пока нажата кнопка Lb запуска отслеживания или в течение определенного периода времени после нажатия кнопки Lb запуска отслеживания. В блоке 3b ввода команд, показанном на ФИГ. 5, используется двухступенчатый метод ввода. Кнопка Lb запуска отслеживания, соответствующая вводу первой ступени, не обязательна. В блоке 3b ввода команд может использоваться одноступенчатый метод ввода.
[0074] Поперечный паз Lc представляет собой паз, в который входит рукоятка рычага La, причем рычаг La перемещается в поперечном пазе Lc оператором R дистанционного управления. Блок 3b ввода команд, показанный на ФИГ. 5, вводит команду дистанционного управления путем изменения положения рычага La вдоль поперечного паза Lc. Как показано на ФИГ. 5, в одном из примеров ориентация поперечного паза Lc вверх соответствует команде «продолжать», вниз – команде «остановиться», вправо – команде «сменить полосу», влево – команде «отменить».
[0075] Оператор R дистанционного управления передает команду «продолжить» на беспилотное транспортное средство 2, например, путем перемещения рычага La вверх при нажатой кнопке Lb запуска отслеживания. Оператор R дистанционного управления передает команду «остановиться» на беспилотное транспортное средство 2, например, путем перемещения рычага La вниз при нажатой кнопке Lb запуска отслеживания. Если оператор R дистанционного управления хочет отменить предыдущую команду, он вводит команду «отменить» путем перемещения рычага La влево при нажатой кнопке Lb запуска отслеживания.
[0076] Надпись «продолжить» на поперечном пазе Lc может представлять собой отображение на цифровом дисплее, которое можно изменить. Надписи «продолжить» и «сменить полосу» могут быть изменены в зависимости от ситуации в удаленной точке управления беспилотного транспортного средства 2. Например, «сменить полосу» может отображаться как «обгон» в зависимости от ситуации. В этом случае можно подать беспилотному транспортному средству 2 команду на обгон другого транспортного средства, переместив рычаг La вправо.
[0077] «Остановиться» в команде дистанционного управления может иметь значение «ожидание определения». В случае команды «остановиться» беспилотное транспортное средство 2 останавливается независимо от своего местонахождения, а в случае «ожидания определения» автономное движение продолжается до места, предписанного командой (например, стоп-линия перед светофором). Блок 3b ввода команд может отдельно вводить команды «остановиться» и «ожидание определения». При наличии кнопки Lb запуска отслеживания, и когда оператор R дистанционного управления продолжает нажимать кнопку Lb запуска отслеживания, ситуация может рассматриваться как указание «ожидание определения».
[0078] Вместо поперечного паза можно использовать прямой паз, в котором можно выбирать две команды управления, в частности, «продолжить» и «остановиться» (или «ожидание»), или ступенчатый паз, используемый для рычага переключения передач транспортного средства. Кроме того, может быть предусмотрена отдельная кнопка экстренной высадки. Экстренная высадка может быть одной из команд, доступных для выбора при переключении рычага La.
[0079] Кроме того, в блоке 3b ввода команд могут использоваться различные методы ввода. Блок 3b ввода команд может использовать кнопку, сенсорный экран или различные переключатели, например, тумблер и клавишный переключатель. Блок 3b ввода команд может использовать клавиатуру или устройство голосового ввода. В блоке 3b ввода команд можно предусмотреть крышку кнопки, предотвращающую ошибочное нажатие. В блоке 3b ввода команд во избежание ошибочного нажатия можно совместно использовать кнопку и переключатель, кнопку и ручку или педаль и рычаг. Блок 3b ввода команд может быть выполнен с возможностью ввода команды путем комбинирования, по меньшей мере, двух из следующих органов: рычаг, кнопка, сенсорный экран, педаль и голосовой ввод.
[0080] При использовании виртуальной кнопки, например, сенсорного экрана, отсутствие фиксации положения кнопки на дисплее позволяет оператору R дистанционного управления отменить рефлекторную ошибочную операцию, выполненную без полного понимания ситуации беспилотного транспортного средства 2. Детали (в частности, «продолжить» или «остановиться») команды, вводимой оператором R дистанционного управления, могут быть доведены голосом и / или изображением на дисплее. Уведомление оператора R дистанционного управления на дисплее может осуществляться текстом или изменением цвета.
[0081] В блоке 3b ввода команд может использоваться кнопка разблокировки. В данном случае сигнал не передается на кнопку разблокировки, пока величина выжимания кнопки не окажется в заданном диапазоне усилия нажатия. Иными словами, сигнал не передается, если величина нажатия недостаточна или избыточна. В блоке 3b ввода команд может использоваться двухступенчатый переключатель, изменяющий передаваемую информацию при низком или высоком уровне нажатия. Блок 3b ввода команд может использовать диск (например, поворотный переключатель), позволяющий выбирать команду управления путем вращения диска. Диск содержит несколько делений, каждое из которых соответствует команде, в частности, «продолжить» или «остановиться».
[0082] В базе 4 данных операторов дистанционного управления хранится информация об операторе R дистанционного управления, которая может содержать, например, персональные идентификационные данные оператора R дистанционного управления и/или информацию о графике работы оператора R дистанционного управления. График работы оператора R дистанционного управления содержит количество операторов R дистанционного управления, которые могут отвечать за каждый период времени. Наличие базы 4 данных операторов дистанционного управления не обязательно.
[0083] База 5 картографических данных хранит картографическую информацию. Картографическая информация содержит информацию о расположении и форме дорог (например, кривизне), а также информацию о расположении перекрестка или примыкания и светофоров. Картографическая информация может также содержать информацию об ограничениях движения, например, о разрешенной максимальной скорости, связанную с информацией о местоположении, а также о возможности перестроения в другую полосу. Картографическая информация может содержать информацию о населенном пункте, например, районе города или пригороде. Картографическая информация может содержать информацию о расположении базовых станций обмена данными. База 5 картографической информации может быть реализована в виде сервера, способного обмениваться данными с сервером 10 дистанционного управления.
[0084] Функциональная конфигурация сервера 10 дистанционного управления будет описана ниже. Как показано на ФИГ. 4, сервер 10 дистанционного управления содержит блок 41 получения информации об автономном движении, блок 42 получения информации о дорожной обстановке, блок 43 распознавания ситуации в удаленной точке управления, блок 44 прогнозирования задержки установления соединения, блок 45 прогнозирования времени, блок 46 распределения периодов отслеживания, блок 47 уведомления о распределении периодов отслеживания, блок 48 получения информации о ситуациях дорожного движения, блок 49 передачи информации, блок 50 передачи команд дистанционного управления, блок 51 назначения допустимого времени отмены и блок 52 передачи команды отмены.
[0085] Блок 41 получения информации об автономном движении получает информацию об автономном движении, передаваемую с беспилотного транспортного средства 2. Блок 41 получения информации об автономном движении получает информацию о местоположении беспилотного транспортного средства 2 и целевом маршруте беспилотного транспортного средства 2 в качестве информации об автономном движении. Блок 41 получения информации об автономном движении может получать план скорости и/или маршрут беспилотного транспортного средства 2 дополнительно к информации о местоположении и целевом маршруте беспилотного транспортного средства 2.
[0086] Когда блок 41 получения информации об автономном движении получает информацию об автономном движении, блок 42 получения информации о дорожной обстановке получает информацию об обстановке на целевом маршруте беспилотного транспортного средства 2. Информация о дорожной обстановке содержит, по меньшей мере, информацию о заторах. Информация о дорожной обстановке может содержать информацию о зонах дорожных работ. Информация о дорожной обстановке может содержать информацию о расписании переключения сигналов светофоров на целевом маршруте. Информация о дорожной обстановке может содержать сведения о запланированном времени прохождения поезда по железнодорожному переезду на целевом маршруте. Информация о дорожной обстановке может содержать сведения об ориентировочной скорости движения по дороге на целевом маршруте.
[0087] Блок 42 получения информации о дорожной обстановке может получать информацию об обстановке на целевом маршруте, например, посредством обмена данными с центром информирования о дорожной обстановке. Блок 42 получения информации о дорожной обстановке может получать информацию от различных транспортных служб через сеть Интернет. Блок 42 получения информации о дорожной обстановке может получать информацию об обстановке на целевом маршруте на основании информации от другого беспилотного транспортного средства 2, находящегося в пути в данный момент времени. Блок 42 получения информации о дорожной обстановке может распознавать пробки в определенной зоне и скорость движения другого беспилотного транспортного средства 2. Блок 42 получения информации о дорожной обстановке может определять базовую скорость транспортного потока на целевом маршруте в определенной зоне и скорость движения другого беспилотного транспортного средства 2. Если скорость беспилотных транспортных средств 2 может быть получена для той же дороги, в качестве расчетной скорости можно использовать среднюю скорость беспилотных транспортных средств 2.
[0088] Блок 43 распознавания ситуации в удаленной точке управления распознает ситуацию в удаленной точке управления на целевом маршруте на основании положения беспилотного транспортного средства 2, целевого маршрута беспилотного транспортного средства 2 и картографической информации. Ситуацию в удаленной точке управления, распознаваемую блоком 43 распознавания ситуации в удаленной точке управления, можно определять по картографической информации и целевому маршруту. Положение на карте, соответствующее ситуации в удаленной точке управления, определяется как положение, в котором имеет место ситуация в удаленной точке управления.
[0089] На ФИГ. 6A изображен пример ситуации, в которой транспортное средство проезжает светофор на прямой дороге. На ФИГ. 6A изображено беспилотное транспортное средство 2, пешеходный переход CR, стоп-линия SL и светофор TL1. На ФИГ. 6A местом возникновения ситуации, в которой транспортное средство проезжает светофор TL1, может быть, например, стоп-линия SL. Кроме того, местом возникновения ситуации, в которой транспортное средство проезжает светофор TL1, может быть расположение пешеходного перехода CR или светофора TL1 (место непосредственно под светофором TL1). Оператор R дистанционного управления передает команду дистанционного управления, например, «продолжить» или «остановиться», с учетом сигнала светофора.
[0090] На ФИГ. 6B изображен пример ситуации, в которой транспортное средство меняет полосу движения. На ФИГ. 6B показано другое транспортное средство Na и еще одно транспортное средство Nb, движущиеся по соседней полосе, в которую предполагается перестроение транспортного средства, заданный участок SE перестроения, а также начальное положение Sa и конечное положение Se заданного участка SE перестроения. Заданный участок SE перестроения может представлять собой, например, участок, на котором правилами дорожного движения разрешено перестроение.
[0091] На ФИГ. 6B беспилотному транспортному средству 2 необходимо перестроиться в соседнюю полосу, чтобы прибыть в пункт назначения по целевому маршруту. На ФИГ. 6B местом возникновения ситуации, в которой транспортное средство начинает перестроение, может быть, например, начальное положение Sa заданного участка SE перестроения. Местом возникновения ситуации, в которой транспортное средство начинает перестроение, может быть положение, находящееся на определенном расстоянии от начального положения Sa заданного участка SE перестроения, или положение, находящееся на определенном расстоянии до конечного положения Se заданного участка SE перестроения. Оператор R дистанционного управления подает команду дистанционного управления на перестроение во время отслеживания, например, промежутка между другим транспортным средством Na и транспортным средством Nb, движущимся по соседней полосе.
[0092] Например, на перекрестке на целевом маршруте движения беспилотного транспортного средства 2 блок 43 распознавания ситуации в удаленной точке управления может считать ситуацию выезда транспортного средства на перекресток ситуацией в удаленной точке управления. Местом возникновения ситуации, в которой транспортное средство выезжает на перекресток, может быть, например, перекресток или стоп-линия перед перекрестком. Например, на перекрестке, на котором беспилотное транспортное средство 2 совершает правый поворот на целевом маршруте своего движения, блок 43 распознавания ситуации в удаленной точке управления может считать ситуацию совершения правого поворота транспортным средством ситуацией в удаленной точке управления. Местом возникновения ситуации, в которой транспортное средство совершает правый поворот, может быть, например, перекресток.
[0093] Например, в зоне производства работ на целевом маршруте движения блок 43 распознавания ситуации в удаленной точке управления может считать ситуацию въезда транспортного средства в зону производства работ ситуацией в удаленной точке управления. Местом возникновения ситуации, в которой транспортное средство въезжает в зону производства работ, может быть, например, начало зоны производства работ. Например, на железнодорожном переезде на целевом маршруте движения блок 43 распознавания ситуации в удаленной точке управления может считать ситуацию въезда транспортного средства на железнодорожный переезд ситуацией в удаленной точке управления. Местом возникновения ситуации, в которой транспортное средство въезжает на железнодорожный переезд, может быть, например, место расположения железнодорожного переезда.
[0094] Блок 43 распознавания ситуации в удаленной точке управления считает ситуацией в удаленной точке управления ситуацию, в которой транспортное средство останавливается на автобусной остановке или отъезжает от автобусной остановки на целевом маршруте движения. Местом возникновения ситуации, в которой транспортное средство останавливается на автобусной остановке или отъезжает от автобусной остановки, может быть, например, место расположения автобусной остановки. В месте посадки пользователя (например, пользователя, направившего запрос на отправку беспилотного транспортного средства 2) блок 43 распознавания ситуации в удаленной точке управления считает ситуацией в удаленной точке управления ситуацию, в которой транспортное средство останавливается для посадки пользователя и отъезжает от места посадки. Местом возникновения ситуации, в которой транспортное средство останавливается для посадки пользователя и отъезжает от места посадки, может быть, например, место посадки. То же самое справедливо в случае, в котором беспилотное транспортное средство 2 останавливается в месте назначения и отъезжает от него. Блок 43 распознавания ситуации в удаленной точке управления может быть установлен в ЭБУ 20 автономного движения беспилотного транспортного средства 2, вместо сервера 10 дистанционного управления.
[0095] Блок 44 прогнозирования задержки установления соединения прогнозирует задержку передачи данных, соответствующую ситуации в удаленной точке управления на целевом маршруте, на основании ситуации в удаленной точке управления, распознанной блоком 43 распознавания ситуации в удаленной точке управления, и картографической информации. Задержка установления соединения возникает при обмене данными между устройством 1 дистанционного управления и беспилотным транспортным средством 2. Блок 44 прогнозирования задержки установления соединения прогнозирует задержку передачи данных, соответствующую ситуации в удаленной точке управления, например, из положения, в котором возникает ситуация в удаленной точке управления, распознанная блоком 43 распознавания ситуации в удаленной точке управления, на основании целевого маршрута беспилотного транспортного средства 2 и картографической информации.
[0096] Блок 44 прогнозирования задержки установления соединения прогнозирует задержку передачи данных из положения, в котором имеет место ситуация в удаленной точке управления, например, путем ссылки на картографические данные места задержки соединения, в которых положение на карте связано с задержкой установления соединения. Метод формирования картографических данных задержки соединения, по существу, не ограничен. Картографические данные задержки соединения могут быть составлены, например, путем регистрации задержек установления соединения между собирающим информацию транспортным средством и устройством 1 дистанционного управления в связи с местоположением собирающего информацию транспортного средства. Картографические данные задержки соединения могут генерироваться или обновляться с использованием задержки установления соединения между несколькими беспилотными транспортными средствами 2 и устройством 1 дистанционного управления, а также информации о положении беспилотного транспортного средства 2, а не исследовательского транспортного средства, собирающего информацию.
[0097] Выбор способа измерения задержки соединения, по существу, не ограничен; допускается использование других известных способов. В качестве времени задержки связи может использоваться время прохождения сигнала в обоих направлениях (RTT), под которым понимают время прохождения пакета в обоих направлениях между беспилотным транспортным средством 2 и устройством 1 дистанционного управления. Поскольку задержка установления соединения включает стохастическую задержку (например, задержку в очереди), среднее или максимальное значение RTT в заданное время можно рассчитать для каждого положения на карте или каждого фиксированного участка, и обрабатывать в виде задержки соединения в таком месте или на таком участке.
[0098] Блок 44 прогнозирования задержки установления соединения может прогнозировать задержку передачи данных в соответствии с ситуацией в удаленной точке управления на целевом маршруте на основании информации о положении базовой станции связи, входящей в состав картографической информации. Если, например, расстояние от места возникновения ситуации в удаленной точке управления до ближайшей базовой станции связи равно пороговому расстоянию или превышает его, блок 44 прогнозирования задержки установления соединения прогнозирует, что по сравнению со случаем, в котором расстояние между местом возникновения ситуации в удаленной точке управления и ближайшей базовой станцией связи меньше порогового расстояния, задержка соединения, соответствующая ситуации в удаленной точке управления, будет иметь большее значение. Пороговое расстояние является предварительно заданным.
[0099] Блок 44 прогнозирования задержки установления соединения может прогнозировать увеличение задержки передачи данных с увеличением расстояния от места возникновения ситуации в удаленной точке управления до ближайшей базовой станции связи. Блок 44 прогнозирования задержки установления соединения может прогнозировать увеличение задержки передачи данных в том случае, если между ближайшей базовой станцией связи и местом возникновения ситуации в удаленной точке управления существует экранированная зона, например, высотная застройка, по сравнению со случаем отсутствия экранированной зоны. Кроме того, блок 44 прогнозирования задержки установления соединения может прогнозировать увеличение задержки передачи данных, соответствующей ситуации в удаленной точке, если место возникновения ситуации в удаленной точке управления входит в зону высотной застройки (или городской район), по сравнению со случаем, в котором место возникновения ситуации в удаленной точке управления входит в пригородную зону.
[0100] Блок 45 прогнозирования времени прогнозирует время начала и завершения отслеживания оператором R дистанционного управления ситуации в удаленной точке управления на целевом маршруте, на основании целевого маршрута, информации о местоположении беспилотного транспортного средства 2, картографической информации, ситуации в удаленной точке управления на целевом маршруте, распознанной блоком 43 распознавания ситуации в удаленной точке управления, а также задержки соединения, спрогнозированной блоком 44 прогнозирования задержки установления соединения. Блок 45 прогнозирования времени прогнозирует время начала и завершения отслеживания для каждого беспилотного транспортного средства 2 и каждой ситуации в удаленной точке управления.
[0101] Прогноз времени начала отслеживания будет описан ниже. Под временем начала отслеживания понимают время, в которое оператор R дистанционного управления начинает отслеживать беспилотное транспортное средство 2. Для прогнозирования времени начала отслеживания блок 45 прогнозирования времени прогнозирует, например, время прибытия беспилотного транспортного средства 2 в место возникновения ситуации в удаленной точке управления. Под временем прибытия может пониматься, например, время, в которое беспилотное транспортное средство 2 прибывает в место возникновения ситуации (например, стоп-линия SL), в которой транспортное средство проезжает светофор TL1, как показано на ФИГ. 6A. Под временем прибытия понимают время, в которое беспилотное транспортное средство 2 прибывает в место возникновения ситуации (например, начальное положение Sa), в которой транспортное средство начинает перестроение, как показано на ФИГ. 6B.
[0102] Блок 45 прогнозирования времени прогнозирует время прибытия, например, исходя из предположения, что беспилотное транспортное средство 2 движется с заданной скоростью, на основании целевого маршрута, информации о местоположении беспилотного транспортного средства 2, картографической информации и положения, в котором на целевом маршруте возникает ситуация в удаленной точке управления. Заданная скорость транспортного средства может быть фиксированным значением. Способ определения заданной скорости движения транспортного средства, по существу, не ограничен. Заданная скорость транспортного средства может представлять собой, например, максимально разрешенную скорость для каждой дороги, по которой проходит целевой маршрут, или скорость, которая на определенную величину (например, 5 км/ч) ниже максимально разрешенной скорости. Текущая скорость беспилотного транспортного средства 2 может быть использована в качестве заданной скорости транспортного средства.
[0103] Скорость движения транспортного средства может изменяться в зависимости от местоположения. Блок 45 прогнозирования времени может использовать, например, базовую скорость движения потока для каждой дороги на целевом маршруте, входящую в информацию о дорожной обстановке, в качестве заданной скорости транспортного средства. Кроме того, блок 45 прогнозирования времени может использовать заданную скорость транспортного средства, изменяющуюся таким образом, чтобы на стоп-линии скорость была равна нулю. Блок 45 прогнозирования времени использует заданную скорость, с которой беспилотное транспортное средство 2 временно останавливается, выезжая на главную дорогу с второстепенной дороги на целевом маршруте в стране или регионе, правила дорожного движения которых предписывают временную остановку при выезде транспортного средства на главную дорогу со второстепенной дороги. То же самое относится к случаю, когда беспилотное транспортное средство 2 выезжает на железнодорожный переезд. Длительность временной остановки, по существу, не ограничена и может составлять 1 секунду, 5 секунд и т.п. Кроме того, поскольку беспилотное транспортное средство 2 останавливается на определенное время на автобусной остановке, если беспилотное транспортное средство 2 является беспилотным автобусом, блок 45 прогнозирования времени может использовать заданную скорость транспортного средства с учетом длительности пребывания на автобусной остановке.
[0104] Блок 45 прогнозирования времени может получать время прибытия с использованием плана скорости транспортного средства вместо заданной скорости транспортного средства, если блок 41 получения информации об автономном движении получил от беспилотного транспортного средства 2 план скорости, используемый для автономного движения. В этом случае блок 45 прогнозирования времени прогнозирует время прибытия беспилотного транспортного средства 2 в место возникновения ситуации в удаленной точке управления на целевом маршруте, на основании целевого маршрута, информации о местоположении беспилотного транспортного средства 2, картографической информации, положения, в котором на целевом маршруте возникает ситуация в удаленной точке управления, и плана скорости беспилотного транспортного средства 2.
[0105] Блок 45 прогнозирования времени может использовать сочетание плана скорости движения транспортного средства и заданной скорости движения транспортного средства. Блок 45 прогнозирования времени прогнозирует время прибытия, если план скорости транспортного средства подготовлен только на определенное расстояние от текущего местоположения беспилотного транспортного средства 2, но не подготовлен до места назначения, используя заданную скорость транспортного средства относительно оставшегося расстояния.
[0106] Блок 45 прогнозирования времени может прогнозировать (или корректировать) время прибытия, руководствуясь информацией о дорожной обстановке, полученной блоком 42 получения информации о дорожной обстановке, дополнительно к информации о местоположении и целевом маршруте беспилотного транспортного средства 2, картографической информации и задержке установления соединения. Блок 45 прогнозирования времени может прогнозировать время прибытия с учетом длины затора или зоны производства работ на целевом маршруте, входящей в информацию о дорожной обстановке.
[0107] Блок 45 прогнозирования времени может прогнозировать время прибытия на основании графика переключения сигналов светофоров на целевом маршруте, входящего в информацию о дорожной обстановке. Если сигнал светофора указывает на запрет движения транспортного средства (например, красный свет), подъехавшего к светофору, беспилотное транспортное средство 2 будет ожидать переключения светофора в состояние, в котором транспортному средству разрешен проезд (например, зеленый свет). Аналогичным образом, блок 45 прогнозирования времени может прогнозировать время прибытия, руководствуясь информацией о запланированном времени прохождения поезда через железнодорожный переезд на целевом маршруте, входящей в информацию о дорожной обстановке. Если транспортное средство, прибывшее на железнодорожный переезд, вынуждено ожидать проезда поезда, беспилотное транспортное средство 2 будет ожидать возможности проезда через железнодорожный переезд.
[0108] Блок 45 прогнозирования времени принимает за время начала отслеживания момент времени, предваряющий время прибытия, в которое беспилотное транспортное средство 2 прибывает в место возникновения ситуации в удаленной точке управления, на величину подготовительного периода. Чем дольше длительность подготовительного периода, тем раньше начнется отслеживания относительно времени прибытия.
[0109] Блок 45 прогнозирования времени изменяет длительность подготовительного периода к ситуации в удаленной точке управления в соответствии с задержкой соединения, соответствующей ситуации в удаленной точке управления, спрогнозированной блоком 44 прогнозирования задержки установления соединения. Блок 45 прогнозирования времени увеличивает длительность подготовительного периода для ситуации в удаленной точке управления, например, если задержка соединения равна допустимому пороговому значению или превышает его, по сравнению со случаем, в котором задержка соединения меньше допустимого порогового значения. Блок 45 прогнозирования времени может установить более длительное время подготовки при увеличении задержки соединения. Допустимый порог является заранее заданной величиной.
[0110] Блок 45 прогнозирования времени может изменять длительность подготовительного периода в зависимости от ситуации в удаленной точке управления. Например, когда транспортное средство выезжает на перекресток, блок 45 прогнозирования времени может использовать первую длительность Pa подготовительного периода, если транспортное средство выезжает на перекресток без светофоров, и вторую длительность Pb подготовительного периода, если транспортное средство выезжает на перекресток со светофорами. Первая длительность Pa подготовительного периода превышает вторую длительность Pb подготовительного периода. Иными словами, на перекрестке со светофорами перед выездом на перекресток необходимо определить сигнал светофора. Поэтому время начала отслеживания может быть принято более ранним, чем на перекрестке без светофоров.
[0111] Блок 45 прогнозирования времени может задержать определение перестроения в ситуации, в которой транспортное средство начинает перестроение и находится на участке, на котором ему разрешено выполнять перестроение. Таким образом, длительность подготовительного периода может быть меньше первой длительности Pa подготовительного периода и второй длительности Pb подготовительного периода. Длительность подготовительного периода может уменьшаться по мере увеличения длины участка, на котором разрешено перестроение, в том числе до нуля.
[0112] Блок 45 прогнозирования времени может изменять длительность подготовительного периода в зависимости от уровня сложности дорожной обстановки в месте возникновения ситуации в удаленной точке управления. Под сложностью дорожной обстановки понимают уровень сложности, препятствующий оператору R дистанционного управления распознавать дорожную обстановку.
[0113] Сложность может возрастать, например, по мере увеличения степень загруженности дорог (например, плотности транспортного потока) в месте возникновения ситуации в удаленной точке управления. Степень затора может быть взята из информации о дорожной обстановке. Сложность дорожной обстановки может возрастать по мере увеличения количества препятствий в месте возникновения ситуации в удаленной точке управления. Примерами препятствий являются растения (например, уличные деревья), телефонные столбы, стойки и заборы. Информацию о препятствиях можно получить из картографической информации.
[0114] Блок 45 прогнозирования времени увеличивает длительность подготовительного периода по мере увеличения сложности, так как считается, что оператору R дистанционного управления требуется время, чтобы понять ситуацию, в которой находится беспилотное транспортное средство 2, если сложность дорожной обстановки в месте возникновения ситуации в удаленной точке управления повышена. В альтернативном варианте блок 45 прогнозирования времени увеличивает длительность подготовительного периода для ситуации в удаленной точке управления, если сложность дорожной обстановки равна или превышает порог сложности в месте возникновения ситуации в удаленной точке управления по сравнению со случаем, в котором сложность ниже порогового значения сложности. Порог сложности является заранее заданной величиной.
[0115] Кроме того, блок 45 прогнозирования времени может прогнозировать время прибытия на каждую автобусную остановку, если беспилотное транспортное средство 2 является беспилотным автобусом, используя план обслуживания, в котором время прибытия и отправления определены для каждой автобусной остановки. Блок 45 прогнозирования времени может принять время, предшествующее времени прибытия на автобусную остановку, с учетом длительности подготовительного периода за время начала отслеживания для остановки на автобусной остановке.
[0116] Кроме того, оператор R дистанционного управления может подать команду открытия или закрытия дверей беспилотного автобуса и отъезда от автобусной остановки после остановки на автобусной остановке. Блок 45 прогнозирования времени может спрогнозировать время начала отслеживания, в которое транспортное средство отъезжает от автобусной остановки, по времени отправления от автобусной остановки, если период отслеживания оператором R дистанционного управления, пока транспортное средство останавливается на автобусной остановке, отделено от периода отслеживания оператором R дистанционного управления, когда транспортное средство отъезжает от автобусной остановки.
[0117] Прогноз времени завершения отслеживания будет описан ниже. Под временем завершения отслеживания понимают время, в которой оператор R дистанционного управления завершает отслеживание беспилотного транспортного средства 2 в ситуации в удаленной точке управления. Время определения завершения отслеживания, то есть время фактического завершения отслеживания оператором R дистанционного управления, зависит от содержания команды, поданной оператором R дистанционного управления, времени поступления команды и ситуации, в которой находится беспилотное транспортное средство 2 после подачи команды. Оператор R дистанционного управления может прекратить отслеживание сразу после подачи команды. Ниже будет описано время завершения отслеживания, используемое для настройки графика отслеживания оператором R дистанционного управления.
[0118] Блок 45 прогнозирования времени может задать в качестве времени завершения отслеживания, например, момент времени, наступающий позже времени начала отслеживания на величину периода отслеживания. Чем дольше длительность периода отслеживания, тем на большее время будет сдвинуто время завершения отслеживания после времени начала отслеживания. Длительность периода отслеживания может быть фиксированной величиной.
[0119] Блок 45 прогнозирования времени изменяет длительность периода отслеживания для ситуации в удаленной точке управления в соответствии с задержкой соединения, соответствующей ситуации в удаленной точке управления, спрогнозированной блоком 44 прогнозирования задержки установления соединения. Блок 45 прогнозирования времени увеличивает длительность периода отслеживания для ситуации в удаленной точке управления, например, если задержка соединения равна допустимому порогу задержки или превышает его, по сравнению со случаем, в котором задержка соединения меньше допустимого порога задержки. Блок 45 прогнозирования времени может назначить более длительный период отслеживания при увеличении задержки соединения. Допустимый порог задержки является заранее заданной величиной.
[0120] Блок 45 прогнозирования времени может изменять длительность периода отслеживания в зависимости от ситуации в удаленной точке управления. Блок 45 прогнозирования времени может использовать, например, первую длительность Ma как длительность периода отслеживания, если транспортное средство совершает правый поворот после выезда на перекресток, и вторую длительность Mb как длительность периода отслеживания, если транспортное средство не совершает правый поворот после выезда на перекресток. Первая длительность Ma периода отслеживания превышает вторую длительность Mb периода отслеживания. Иными словами, команду дистанционного управления для совершения правого поворота на перекрестке также подают, когда транспортное средство совершает правый поворот на перекрестке после выезда на перекресток, таким образом, время завершения отслеживания может наступить позже времени завершения отслеживания для случая, в котором транспортное средство не совершает правый поворот на перекрестке после выезда. Кроме того, если ситуация с выездом транспортного средства на перекресток является ситуацией в удаленной точке управления, ситуация совершения правого поворота на перекрестке не обязательно должна быть ситуацией в удаленной точке управления, и наоборот.
[0121] Блок прогнозирования времени 45 может увеличивать длительность периода отслеживания, если длина участка, на котором транспортному средству разрешено перестроение, увеличивается в ситуации, когда транспортное средство начинает перестроение. Кроме того, блок 45 прогнозирования времени прогнозирует время прибытия беспилотного транспортного средства 2 в конечное положение Se заданного участка SE перестроения с заданной скоростью транспортного средства, в качестве времени завершения отслеживания независимо от длительности периода отслеживания в ситуации, когда транспортное средство начинает перестроение.
[0122] Блок 45 прогнозирования времени может изменять длительность периода отслеживания в зависимости от сложности дорожной обстановки в месте возникновения ситуации в удаленной точке управления. Блок 45 прогнозирования времени может увеличивать длительность периода отслеживания с ростом сложности дорожной обстановки в месте возникновения ситуации в удаленной точке управления. В альтернативном варианте блок 45 прогнозирования времени увеличивает длительность периода отслеживания для ситуации в удаленной точке управления, если сложность дорожной обстановки равна или превышает порог сложности в месте возникновения ситуации в удаленной точке управления по сравнению со случаем, в котором сложность ниже порога сложности.
[0123] Блок 46 распределения периодов отслеживания устанавливает графики отслеживания нескольких операторов R дистанционного управления, построенные на основании времени начала и завершения отслеживания ситуации в каждой удаленной точке управления нескольких беспилотных транспортных средств 2. Под графиком отслеживания понимают график, согласно которому оператор R дистанционного управления отслеживает любое из беспилотных транспортных средств 2. Блок 46 распределения периодов отслеживания устанавливает графики отслеживания операторов R дистанционного управления таким образом, чтобы периоды отслеживания (периоды времени от начала до завершения отслеживания) не пересекались.
[0124] Блок 46 распределения периодов отслеживания распознает график отслеживания для каждой ситуации в удаленной точке управления каждого беспилотного транспортного средства 2 на основании времени начала и завершения отслеживания каждой ситуации в удаленной точке управления беспилотного транспортного средства 2. Блок 46 распределения периодов отслеживания устанавливает график отслеживания путем назначения периодов отслеживания для каждой ситуации в удаленной точке управления беспилотного транспортного средства 2 оператору R дистанционного управления. Блок 46 распределения периодов отслеживания устанавливает график отслеживания таким образом, чтобы периоды отслеживания не перекрывались. Блок 46 распределения периодов отслеживания может установить график отслеживания таким образом, чтобы существовал определенный временной интервал от времени завершения непосредственно предшествующего периода отслеживания до времени начала следующего периода отслеживания.
[0125] На ФИГ. 7A изображена диаграмма, иллюстрирующая пример периодов отслеживания трех беспилотных транспортных средств. Три беспилотных транспортных средства 2 описаны как беспилотные транспортные средства 2A, 2B, 2C. На ФИГ. 7A показаны период a1 отслеживания, соответствующий первой ситуации в удаленной точке управления беспилотного транспортного средства 2A, период a2 отслеживания, соответствующий второй ситуации в удаленной точке управления беспилотного транспортного средства 2A, период b1 отслеживания, соответствующий ситуации в удаленной точке управления беспилотного транспортного средства 2B, период c1 отслеживания, соответствующий первой ситуации в удаленной точке управления беспилотного транспортного средства 2C, а также период c2 отслеживания, соответствующий второй ситуации в удаленной точке управления беспилотного транспортного средства 2C.
[0126] На ФИГ. 7A временем начала периода a1 отслеживания является t1, временем начала периода b1 отслеживания является t2, временем завершения периода a1 отслеживания является t3, временем начала периода c1 отслеживания является t4, временем завершения периода c1 отслеживания является t5, временем начала периода a2 отслеживания является t6, временем завершения периода b1 отслеживания является t7, временем начала периода c2 отслеживания является t8, временем завершения периода a2 отслеживания является t9, и временем завершения периода c2 отслеживания является t10. Моменты t1-t10 времени расположены последовательно.
[0127] Как показано на ФИГ. 7A, период a1 отслеживания беспилотного транспортного средства 2A и период b1 отслеживания беспилотного транспортного средства 2B перекрываются в промежутке между моментами t2 и t3 времени. Кроме того, период b1 отслеживания беспилотного транспортного средства 2B и период c1 отслеживания беспилотного транспортного средства 2C перекрываются в промежутке между моментами t4 и t5 времени. Период b1 отслеживания беспилотного транспортного средства 2B и период a2 отслеживания беспилотного транспортного средства 2A перекрываются в промежутке между моментами t6 и t7 времени. Период a2 отслеживания беспилотного транспортного средства 2A и период c2 отслеживания беспилотного транспортного средства 2C перекрываются в промежутке между моментами t8 и t9 времени.
[0128] На ФИГ. 7B изображена диаграмма, иллюстрирующая пример графика отслеживания двух операторов дистанционного управления. В данном случае два оператора R дистанционного управления будут описаны как операторы R1, R2 дистанционного управления. Как показано на ФИГ. 7B, блок 46 распределения периодов отслеживания устанавливает график оператора R1 дистанционного управления, назначая ему период a1 отслеживания беспилотного транспортного средства 2A, период c1 отслеживания беспилотного транспортного средства 2C, и период a2 отслеживания беспилотного транспортного средства 2A. Блок 46 распределения периодов отслеживания устанавливает график оператора R2 дистанционного управления, назначая ему период b1 отслеживания беспилотного транспортного средства 2B и период c2 отслеживания беспилотного транспортного средства 2C. Блок 46 распределения периодов отслеживания устанавливает график отслеживания для операторов R1, R2 дистанционного управления таким образом, чтобы периоды отслеживания не пересекались.
[0129] Блок 47 уведомления о распределении периодов отслеживания уведомляет каждого оператора R дистанционного управления о графике отслеживания, установленном блоком 46 распределения периодов отслеживания. Блок 47 уведомления о распределении периодов отслеживания уведомляет оператора R дистанционного управления через блок 3a вывода информации интерфейса 3 оператора. Блок 47 уведомления о распределении периодов отслеживания может выводить уведомление путем вывода изображения на дисплей блока 3a вывода информации или вывода звука на динамик. Способ уведомления, по существу, не ограничен.
[0130] На ФИГ. 8A изображен пример изображения для передачи графика отслеживания оператору дистанционного управления. Как показано на ФИГ. 8A, блок 47 уведомления о распределении периодов отслеживания может уведомлять оператора R дистанционного управления о графике обслуживания, например, путем вывода на дисплей времени, оставшегося до времени начала отслеживания. В это время блок 47 уведомления о распределении периодов отслеживания может дублировать графическую информацию на дисплее голосовым сообщением о том, что оставшееся время составляет 20 секунд.
[0131] На ФИГ. 8B изображен другой пример изображения для передачи графика отслеживания оператору дистанционного управления. На ФИГ. 8B время, оставшееся до времени начала отслеживания, показано движением штриха D. На ФИГ. 8B штрих D перемещается слева направо таким образом, чтобы время, в которое штрих D достигает правой стороны, соответствовало времени начала отслеживания. В момент времени начала отслеживания блок 47 уведомления о распределении периодов отслеживания сообщает оператору R дистанционного управления о начале отслеживания.
[0132] Блок 47 уведомления о распределении периодов отслеживания может показывать выделенное изображение оператору R дистанционного управления путем мигания экрана и/или изменения цвета, если время, оставшееся до времени начала отслеживания, меньше порогового значения выделенного изображения. Пороговое значение выделенного изображения является заранее заданной величиной. Блок 47 уведомления о распределении периодов отслеживания может голосовым сообщением оповещать о времени, оставшемся до времени начала отслеживания, если оно меньше порогового значения выделенного изображения.
[0133] Блок 47 уведомления о распределении периодов отслеживания может переключить изображение на дисплее в соответствии со временем, оставшемся до начала отслеживания, с отображения времени, оставшегося до начала отслеживания, на детализированное изображение, к которому добавлена информация о беспилотном транспортном средстве 2. Блок 47 уведомления о распределении периодов отслеживания может переключить изображение на детализированное изображение, если, например, время, оставшееся до начала отслеживания, меньше порогового значения детализированного изображения. Пороговое значение детализированного изображения является заранее заданной величиной. На ФИГ. 9 изображен пример детализированного отображения. Детализированное изображение, показанное на ФИГ. 9, содержит отметку G1 положения беспилотного транспортного средства 2 на карте, изображение G2, снятое передней камерой беспилотного транспортного средства 2, и описательное изображение G3 ситуации в удаленной точке управления беспилотного транспортного средства 2 дополнительно к времени, оставшемуся до начала отслеживания. Кроме того, детализированное изображение не ограничивается примером, показанным на ФИГ. 9, и может содержать, по меньшей мере, одну из отметок G1 положения беспилотного транспортного средства 2 на карте, изображение G2, снятое передней камерой беспилотного транспортного средства 2, и описательное изображение G3 ситуации в удаленной точке управления беспилотного транспортного средства 2.
[0134] Например, когда до начала отслеживания остается 10 секунд, блок 47 уведомления о распределении периодов отслеживания переключается с отображения только оставшегося времени (см. ФИГ. 8A) на детализированное изображение (см. ФИГ. 9). Соответственно, оператор R дистанционного управления может подтвердить ситуацию беспилотного транспортного средства 2 до времени начала отслеживания. Такую детализированную информацию о ситуации беспилотного транспортного средства 2 можно получить из информации о ситуациях во время движения беспилотного транспортного средства 2, полученной блоком 48 получения информации о ситуациях во время движения (см. ниже). Кроме того, блок 47 уведомления о распределении периодов отслеживания не обязательно должен переключаться на детализированное изображение.
[0135] Блок 48 получения информации о ситуациях дорожного движения получает информацию о ситуациях во время движения беспилотного транспортного средства 2 при получении запроса команды дистанционного управления, направляемого беспилотным транспортным средством 2 на сервер 10 дистанционного управления. Информация о ситуациях во время движения может содержать, например, снимок зоны перед беспилотным транспортным средством 2.
[0136] Кроме того, блок 48 получения информации о ситуациях дорожного движения может получать информацию о ситуациях во время движения беспилотного транспортного средства 2 даже в отсутствие запроса команды дистанционного управления. Блок 48 получения информации о ситуациях дорожного движения может получать информацию о ситуациях во время движения беспилотного транспортного средства 2 даже в отсутствие запроса команды дистанционного управления, если время, оставшееся до начала отслеживания беспилотного транспортного средства 2, меньше порогового времени запроса информации. Пороговое время запроса информации является заранее заданной величиной. Пороговое время запроса информации может превышать пороговое значение детализированного изображения, описанное выше. Пороговое время запроса информации может отличаться в зависимости от ситуации в удаленной точке управления. Блок 48 получения информации о ситуациях дорожного движения может периодически получать информацию о ситуациях во время автономного движения беспилотного транспортного средства 2.
[0137] Блок 49 передачи информации предоставляет оператору R дистанционного управления информацию о беспилотном транспортном средстве 2, являющемся объектом дистанционного управления. Блок 49 передачи информации предоставляет оператору R дистанционного управления различные сведения, управляя блоком 3а вывода информации интерфейса 3 оператора. Блок 49 передачи информации предоставляет информацию, когда, например, наступило время начала отслеживания, заданное графиком оператора R дистанционного управления. Блок 49 передачи информацию может начать предоставлять информацию о беспилотном транспортном средстве 2 в определенное время до начала отслеживания.
[0138] Блок 49 передачи информации предоставляет, например, оператору R дистанционного управления информацию о ситуациях во время движения беспилотного транспортного средства 2, полученную блоком 48 получения информации о ситуациях дорожного движения. Блок 49 передачи информации выводит на дисплей блока 3а вывода информации интерфейса 3 оператора снимок зоны перед беспилотным транспортным средством 2. Блок 49 передачи информации может выводить на дисплей изображение, просматриваемое с сиденья водителя беспилотного транспортного средства 2, путем изменения точки обзора. Блок 49 передачи информации может выводить на дисплей изображения зон сбоку и сзади беспилотного транспортного средства 2. Блок 49 передачи информации может выводить на дисплей изображение зоны сзади беспилотного транспортного средства 2 (то есть направление движения беспилотного транспортного средства 2), если транспортное средство паркуется задним ходом. Блок 49 передачи информации может выводить на дисплей панорамное изображение, полученное путем синтеза снимков зон вокруг беспилотного транспортного средства 2, а также изображение в плане, позволяющее наблюдать беспилотное транспортное средство 2 сверху путем синтеза снимков или изменения точки обзора. Блок 49 передачи информации может выводить на дисплей выделенный объект на изображении (например, другое транспортное средство, окруженное рамкой). Если на изображении присутствуют светофоры, то блок 49 передачи информации может выводить на дисплей результаты распознавания сигнала светофора.
[0139] Блок 49 передачи информации может выводить на дисплей не только изображения, снятые камерой беспилотного транспортного средства 2, но и различные фрагменты информации. Блок 49 передачи информации может выводить на дисплей текст или пиктограммы, описывающие ситуацию беспилотного транспортного средства 2, запросившего команду дистанционного управления (ситуацию, в которой транспортное средство совершает правый поворот на перекрестке или избегает столкновения с препятствием). Блок 49 передачи информации может выводить на дисплей тип команды («продолжить», «ожидание» и т.п.), который может быть выбран на дисплее оператором R дистанционного управления. Блок 49 передачи информации может выводить на дисплей информацию о движении беспилотного транспортного средства 2 в соответствии с командой дистанционного управления (траекторию движения беспилотного транспортного средства 2 в ответ на команду «продолжить»).
[0140] Блок 49 передачи информации может выводить на дисплей информацию об объекте, обнаруженном радиолокационным датчиком беспилотного транспортного средства 2. Информация об объекте может отображаться в виде пиктограммы на изображении в плане. Если тип объекта идентифицирован, пиктограмма может отображаться в соответствии с найденным типом. Блок 49 передачи информации может выводить на дисплей картографическую информацию о беспилотном транспортном средстве 2, полученную на основании информации о местоположении беспилотного транспортного средства 2. Картографическая информация может храниться на сервере 10 дистанционного управления или может быть получена, например, с другого сервера. Картографическую информацию вокруг беспилотного транспортного средства 2 можно получить в беспилотном транспортном средстве 2.
[0141] Блок 49 передачи информации может выводить на дисплей состояние автономного движения беспилотного транспортного средства 2. Состояние автономного движения может соответствовать, например, замедлению транспортного средства для остановки или ожидания команд. Блок 49 передачи информации может выводить на дисплей информацию о дорожной обстановке, полученную блоком 42 сбора информации о дорожной обстановке. Блок 49 передачи информации может выводить на дисплей, например, информацию о заторах или производстве работ на дорогах вокруг беспилотного транспортного средства 2. Блок 49 передачи информации может выводить на дисплей информацию о регулировании дорожного движения. Блок 49 передачи информации может выводить на дисплей ситуацию в удаленной точке управления, в которой, например, транспортное средство совершает правый поворот на перекрестке, или может выделять пешеходный переход или иной подобный объект. Блок 49 передачи информации может выводить на дисплей подробное текстовое описание ситуации, например: «Пожалуйста, обратите внимание на пешеходов и встречные транспортные средства и выберите команду продолжения движения в тот момент, когда вы можете выполнить правый поворот».
[0142] Блок 49 передачи информации может выводить на дисплей информацию о скорости движения или угле поворота рулевого колеса беспилотного транспортного средства 2. Блок 49 передачи информации может выводить на дисплей информацию о наклоне дороги, на которой находится беспилотное транспортное средство 2. Если в беспилотном транспортном средстве 2 установлена салонная камера, блок 49 передачи информации при необходимости может выводить на дисплей изображение салона беспилотного транспортного средства 2. Блок 49 передачи информации может выводить на дисплей состояние пассажира и/или статус загрузки багажа в беспилотное транспортное средство 2.
[0143] Блок 49 передачи информации предоставляет оператору R дистанционного управления звуковую информацию, используя динамик блока 3а вывода информации интерфейса 3 оператора. Блок 49 передачи информации может выводить ситуацию беспилотного транспортного средства 2 (например, ситуацию, в которой транспортное средство совершает правый поворот на перекрестке или избегает столкновения с препятствием) голосовым сообщением через динамик. Блок 49 передачи информации может выводить уведомление о приближении другого транспортного средства к беспилотному транспортному средству 2 в виде звука или голоса через динамик. Блок 49 передачи информации может непосредственно выводить звуки (шум) вокруг беспилотного транспортного средства 2 через динамик. При необходимости блок 49 передачи информации может выводить голос пассажира, находящегося в салоне транспортного средства, через динамик. Вывод информации через динамик не обязателен.
[0144] Кроме того, если блок 3а вывода информации содержит вибрационный привод, блок 49 передачи информации может передавать информацию оператору R дистанционного управления посредством вибрации. В этом случае блок 49 передачи информации может передавать информацию (предупреждение) оператору R дистанционного управления, включая вибрационный привод в месте, соответствующем, например, направлению, на которое оператор R дистанционного управления должен обратить свое внимание, например, направлению, с которого другое транспортное средство приближается к беспилотному транспортному средству 2, или направлению движения пешехода.
[0145] Кроме того, если установлено допустимое время отмены (см. ниже), блок 49 передачи информации передает оператору R дистанционного управления информацию о допустимом времени отмены. Предоставление информации о допустимом времени отмены будет описано ниже.
[0146] Когда оператор R дистанционного управления передает команду дистанционного управления на блок 3b ввода команд интерфейса 3 оператора, блок 50 передачи команд управления передает команду дистанционного управления на беспилотное транспортное средство 2. Блок 50 передачи команд дистанционного управления передает команду дистанционного управления на беспилотное транспортное средство 2 по сети N.
[0147] Когда оператор R дистанционного управления передает (вводит) команду дистанционного управления, блок 51 назначения допустимого времени отмены задает допустимое время отмены для команды дистанционного управления. Под допустимым временем отмены понимают время, в течение которого оператор R дистанционного управления может отменить команду дистанционного управления. Если оператор R дистанционного управления отменяет команду по истечении допустимого времени отмены, команда дистанционного управления не будет отменена. Блок 49 передачи информации может предоставлять оператору R дистанционного управления информацию о беспилотном транспортном средстве 2 даже после того, как команда дистанционного управления будет передана на беспилотное транспортное средство 2. Оператор R дистанционного управления может отслеживать беспилотное транспортное средство 2 даже после подачи команды дистанционного управления.
[0148] На ФИГ. 10 изображена диаграмма, описывающая допустимое время отмены. На ФИГ. 10 показано допустимое время ac отмены, момент tc1 начала допустимого времени ac отмены и момент tc2 конца допустимого времени ac отмены. Момент tc1 начала допустимого времени ac отмены соответствует времени, в которое оператор R дистанционного управления подал команду дистанционного управления.
[0149] Блок 51 назначения допустимого времени отмены устанавливает допустимое время ac отмены на основании, например, информации о местоположении, картографической информации и состояния движения беспилотного транспортного средства 2. В частности, если ситуация в удаленной точке управления является ситуацией, в которой транспортное средство выезжает на перекресток, блок 51 назначения допустимого времени отмены может назначить допустимое время ac отмены равным времени, оставшемуся до момента, в который положение беспилотного транспортного средства 2, получившего команду дистанционного управления продолжать движение, совпадет со стоп-линией или пешеходным переходом непосредственно перед перекрестком. То же самое можно сказать о ситуации в удаленной точке управления, в которой транспортное средство проезжает светофор, соответствующий пешеходному переходу посередине дороги.
[0150] Кроме того, если ситуация в удаленной точке управления является ситуацией, в которой транспортное средство выезжает на перекресток, блок 51 назначения допустимого времени отмены может назначить допустимое время отмены равным времени, оставшемуся до момента, в который положение беспилотного транспортного средства 2, получившего команду продолжать движение, совпадет с центром перекрестка. Центром может являться, например, область, в которой остановившееся беспилотное транспортное средство 2 будет препятствовать движению других транспортных средств, движущихся по дороге, пересекающей траекторию движения беспилотного транспортного средства 2. Блок 51 назначения допустимого времени отмены в качестве допустимого времени отмены может задать время, оставшееся до проезда транспортного средства через перекресток.
[0151] Кроме того, если ситуация в удаленной точке управления является ситуацией, в которой транспортное средство совершает правый поворот на перекрестке, блок 51 назначения допустимого времени отмены может назначить допустимое время отмены равным времени, оставшемуся до момента, в который положение беспилотного транспортного средства 2 совпадет со стоп-линией для правого поворота или пешеходным переходом на дороге, на которую поворачивает транспортное средство. Оператор R дистанционного управления может подать беспилотному транспортному средству 2 команду поворота направо в отсутствие транспортных средств, приближающихся с противоположного направления, и отменить команду в ситуации, в которой, например, транспортное средство вынуждено остановиться перед пешеходным переходом после въезда на перекресток вследствие загруженности полосы движения, по которой будет двигаться транспортное средство. Блок 51 назначения допустимого времени отмены может назначить допустимое время отмены равным времени, оставшемуся с момента совершения правого поворота до момента начала движения беспилотного транспортного средства 2 по прямой.
[0152] Кроме того, когда ситуация в удаленной точке управления представляет собой ситуацию, в которой транспортное средство начинает перестроение, блок 51 назначения допустимого времени отмены может назначить допустимое время отмены равным времени, оставшемуся до пересечения центром беспилотного транспортного средства 2 разметки между полосами движения. Кроме того, когда ситуация в удаленной точке управления представляет собой ситуацию, в которой транспортное средство совершает правый поворот, блок 51 назначения допустимого времени отмены может назначить допустимое время отмены равным времени, оставшемуся время, оставшееся до выезда беспилотного транспортного средства 2 на полосу встречного движения.
[0153] Кроме того, когда ситуация в удаленной точке управления представляет собой ситуацию, в которой транспортное средство заезжает в зону производства работ, блок 51 назначения допустимого времени отмены может назначить допустимое время отмены равным времени, оставшемуся до заезда беспилотного транспортного средства 2 в зону производства работ. Кроме того, если эта зона достаточно велика, блок 51 назначения допустимого времени отмены может назначить допустимое время отмены равным времени, оставшемуся время, оставшееся до проезда беспилотного транспортного средства 2 через зону производства работ. Кроме того, когда ситуация в удаленной точке управления представляет собой ситуацию, в которой транспортное средство заезжает на железнодорожный переезд, блок 51 назначения допустимого времени отмены может назначить допустимое время отмены равным времени, оставшемуся до выезда беспилотного транспортного средства 2 на железнодорожный переезд.
[0154] Кроме того, если беспилотное транспортное средство 2 представляет собой беспилотный автобус, а ситуация в удаленной точке управления представляет собой ситуацию, в которой транспортное средство останавливается на остановке для беспилотного автобуса, блок 51 назначения допустимого времени отмены может назначить допустимое время отмены равным времени, оставшемуся до остановки беспилотного автобуса. Оператор R дистанционного управления может разрешить беспилотному автобусу продолжать движение, если автобус, которого ожидает человек, стоящий на автобусной остановке, не является беспилотным автобусом, в настоящее время отслеживаемым оператором R дистанционного управления, отменив остановку на автобусной остановке.
[0155] Когда беспилотное транспортное средство 2 является беспилотным автобусом, и оператор R дистанционного управления подает команду дистанционного управления для открытия или закрытия дверей автобуса, блок 51 назначения допустимого времени отмены может назначить допустимое время отмены равным времени, оставшемуся до полного открытия дверей беспилотного автобуса после подачи команды открытия двери. Если с помощью салонной камеры беспилотного автобуса будет обнаружено, что пассажир собирается пройти через дверь, блок 51 назначения допустимого времени отмены может назначить открытие двери. Кроме того, если ситуация в удаленной точке управления представляет собой ситуацию, в которой транспортное средство отъезжает от остановки для беспилотного автобуса, блок 51 назначения допустимого времени отмены может назначить допустимое время отмены равным времени, оставшемуся до достижения беспилотным автобусом определенной скорости. Задание допустимого времени отмены остановки или отправления беспилотного автобуса от остановки может также применяться к допустимому времени отмены остановки в пункте назначения или отправления из пункта назначения беспилотного транспортного средства 2 или места посадки пользователя.
[0156] Кроме того, блок 51 назначения допустимого времени отмены не должен назначать допустимое время отмены, если подана команда дистанционного управления «остановиться». Кроме того, скорость беспилотного транспортного средства 2, используемая для назначения допустимого времени отмены, может быть получена на основании изменения информации о положении беспилотного транспортного средства 2 с течением времени. В этом случае не обязательно знать состояние движения беспилотного транспортного средства 2. Блок 51 назначения допустимого времени отмены может быть предусмотрен в беспилотном транспортном средстве 2. Беспилотное транспортное средство 2 может принять решение об отклонении команды отмены. Блок 51 назначения допустимого времени отмены может назначить допустимое время отмены с учетом задержки установления соединения.
[0157] Если назначено допустимое время отмены, блок 49 передачи информации передает оператору R дистанционного управления информацию о допустимом времени отмены. Блок 49 передачи информации может предоставлять информацию, например, путем вывода на дисплей или голосового вывода времени, оставшегося до истечения допустимого времени отмены. Блок 49 передачи информации может показывать время, оставшееся до истечения допустимого времени отмены, путем вывода на дисплей времени, оставшееся до истечения допустимого времени отмены, например, как показано на ФИГ. 9, вместо времени, оставшегося до начала отслеживания. Время, оставшееся до истечения допустимого времени отмены, может быть показано движением штриха D (см. ФИГ. 8B). Способ передачи информации, по существу, не ограничен.
[0158] Когда оператор R дистанционного управления передает команду отмены на блок 3b ввода команд интерфейса 3 оператора, блок 52 передачи команды отмены передает команду отмены на беспилотное транспортное средство 2. Блок 52 передачи команды отмены передает команду отмены на беспилотное транспортное средство 2, когда, например, оператор R дистанционного управления передает команду дистанционного управления «остановиться» через блок 3b ввода команд в течение допустимого времени ac отмены после подачи команды дистанционного управления «продолжить». Когда оператор R дистанционного управления нажимает кнопку команды отмены на блоке 3b ввода команд, блок 52 передачи команды отмены может передавать команду отмены на беспилотное транспортное средство 2.
[0159] Оператор R дистанционного управления, подающий команду дистанционного управления, и оператор R дистанционного управления, подающий команду отмены, могут отличаться друг от друга. Оператор R дистанционного управления, подающий команду отмены, может передать информацию о беспилотном транспортном средстве 2 оператору R дистанционного управления, подающему команду дистанционного управления, и поставить команду отмены в очередь выполнения после команды дистанционного управления, переданной оператором R дистанционного управления, подающим команду дистанционного управления. Соответственно, можно ограничить выполнение неправильных команд вследствие ошибочного распознавания одним из операторов R дистанционного управления.
Использование системы дистанционного управления транспортным средством в соответствии с первым примером осуществления изобретения
[0160] Использование системы 100 дистанционного управления транспортным средством в соответствии с первым примером осуществления изобретения будет рассмотрено ниже. На ФИГ. 11A и ФИГ. 11B изображены блок-схемы, иллюстрирующие примеры процесса распределения периодов отслеживания. Процесс распределения периодов отслеживания начинается, когда информация об автономном движении поступает в беспилотное транспортное средство 2, которое, например, может являться объектом устройства 1 дистанционного управления. Условие начала процесса распределения периодов отслеживания не ограничивается вышеописанным вариантом. Процесс распределения периодов отслеживания может быть начат по получении заранее заданного сигнала начала процесса. Процесс распределения периодов отслеживания может быть начат в заранее установленное время начала или через регулярные промежутки времени или вручную. Процесс распределения периодов отслеживания может быть начат в зависимости от изменения количества операторов. Процесс распределения периодов отслеживания может быть начат, например, при уменьшении количества операторов вследствие временного перерыва в работе одного из операторов R дистанционного управления и при увеличении количества операторов вследствие возврата оператора R дистанционного управления к работе.
[0161] Как показано на ФИГ. 11A и ФИГ. 11B, устройство 1 дистанционного управления системы 100 дистанционного управления транспортным средством получает информацию об автономном движении от блока 41 сбора информации об автономном движении и информацию о дорожной обстановке от блока 42 получения информации о дорожной обстановке (см. S10). Блок 41 получения информации об автономном движении получает информацию об автономном движении, включая местоположение беспилотного транспортного средства 2 и целевой маршрут беспилотного транспортного средства 2, вместе с данными, переданными с беспилотного транспортного средства 2. Когда блок 41 получения информации об автономном движении получает информацию об автономном движении, блок 42 получения информации о дорожной обстановке получает информацию об обстановке на целевом маршруте беспилотного транспортного средства 2.
[0162] На этапе S12 устройство 1 дистанционного управления распознает ситуацию в удаленной точке управления посредством блока 43 распознавания ситуации в удаленной точке управления. Блок 43 распознавания ситуации в удаленной точке управления может распознавать ситуацию в удаленной точке управления на целевом маршруте, например, на основании положения беспилотного транспортного средства 2, целевого маршрута беспилотного транспортного средства 2 и картографической информации. Блок 43 распознавания ситуации в удаленной точке управления также распознает положение, в котором имеет место ситуация в удаленной точке управления.
[0163] На этапе S14 устройство 1 дистанционного управления прогнозирует задержку установления соединения с помощью блока 44 прогнозирования задержки установления соединения. Блок 44 прогнозирования задержки установления соединения может прогнозировать задержку передачи данных из положения, в котором имеет место ситуация в удаленной точке управления, например, путем ссылки на картографические данные задержки соединения, в которых положение на карте связано с задержкой установления соединения.
[0164] На этапе S16 устройство 1 дистанционного управления задает время начала и завершения отслеживания ситуации в удаленной точке управления при помощи блока 45 прогнозирования времени. Блок 45 прогнозирования времени прогнозирует время начала и завершения отслеживания на основании информации о местоположении и целевого маршрута беспилотного транспортного средства 2, картографической информации, ситуации в удаленной точке управления на целевом маршруте, распознанной блоком 43 распознавания ситуации в удаленной точке управления, а также задержки соединения, спрогнозированной блоком 44 прогнозирования задержки установления соединения. Блок 45 прогнозирования времени может прогнозировать время прибытия, например, исходя из предположения, что беспилотное транспортное средство 2 движется с заданной скоростью, на основании информации о местоположении беспилотного транспортного средства 2, целевого маршрута и картографической информации. Кроме того, блок 45 прогнозирования времени может установить длительность подготовительного периода на основании, например, задержки соединения. Блок 45 прогнозирования времени принимает за время начала отслеживания момент времени, предваряющий время прибытия, в которое беспилотное транспортное средство 2 прибывает в место возникновения ситуации в удаленной точке управления, на величину подготовительного периода. План скорости беспилотного транспортного средства 2 можно использовать вместо заданной скорости транспортного средства. Блок 45 прогнозирования времени может задать в качестве времени завершения отслеживания, например, момент времени, наступающий позже времени начала отслеживания на величину длительности периода отслеживания. Длительность периода отслеживания может быть, например, фиксированным значением.
[0165] На этапе S18 устройство 1 дистанционного управления назначает период отслеживания оператором R дистанционного управления посредством блока 46 распределения периодов отслеживания. Блок 46 распределения периодов отслеживания назначает периоды отслеживания нескольких операторов R дистанционного управления на основании времени начала и времени завершения отслеживания каждой ситуации в удаленной точке управления беспилотных транспортных средств 2. Блок 46 распределения периодов отслеживания назначает периоды отслеживания нескольких операторов R дистанционного управления таким образом, чтобы периоды отслеживания не пересекались.
[0166] На этапе S20 устройство 1 дистанционного управления сообщает оператору R дистанционного управления о назначенном периоде отслеживания с помощью блока 47 распределения периодов отслеживания. Блок 47 уведомления о распределении периодов отслеживания уведомляет оператора R дистанционного управления через блок 3a вывода информации интерфейса 3 оператора.
[0167] На ФИГ. 11B изображена блок-схема, иллюстрирующая один из примеров процесса начала отслеживания. Процесс начала отслеживания, показанный на ФИГ. 11B, выполняется, например, когда назначен период отслеживания.
[0168] На ФИГ. 11B показано, что устройство 1 дистанционного управления определяет, получено ли на этапе S30 время начала отслеживания, назначенное в качестве периода отслеживания оператора R дистанционного управления блоком 47 уведомления о распределении периодов отслеживания. Если будет установлено, что время начала отслеживания наступило (S30: ДА), устройство 1 дистанционного управления переходит к этапу S32. Если будет установлено, что время начала отслеживания не наступило (S30: НЕТ), устройство 1 дистанционного управления завершает текущий процесс и повторяет определение этапа S30 по истечении определенного периода времени.
[0169] На этапе S32 устройство 1 дистанционного управления уведомляет оператора R дистанционного управления о начале отслеживания при помощи блока 47 уведомления о распределении периодов отслеживания и предоставляет ему информацию о ситуациях во время движения беспилотного транспортного средства 2 при помощи блока 49 передачи информации. Блок 47 уведомления о распределении периодов отслеживания информирует оператора R дистанционного управления о начале отслеживания путем вывода изображений на дисплей и/или вывода звуковой информации. Блок 49 передачи информации предоставляет оператору R дистанционного управления информацию о ситуациях во время движения беспилотного транспортного средства 2. Блок 49 передачи информации может предоставлять информацию путем вывода на дисплей блока 3а вывода информации интерфейса 3 оператора снимка зоны перед беспилотным транспортным средством 2.
[0170] На ФИГ. 12A изображена блок-схема, показывающая один из примеров прогнозирования времени начала отслеживания. В данном случае будет описана ситуация, в которой транспортное средство выезжает на перекресток. Процесс прогнозирования времени начала отслеживания может быть включен, например, в процесс на этапе S16, как показано на ФИГ. 11A.
[0171] Как показано на ФИГ. 12A, устройство 1 дистанционного управления на этапе S40 использует блок 45 прогнозирования времени для определения того, является ли ситуация в удаленной точке управления, используемая для прогнозирования времени начала отслеживания, ситуацией с выездом транспортного средства на перекресток. Блок 45 прогнозирования времени определяет, является ли ситуация в удаленной точке управления ситуацией, в которой транспортное средство выезжает на перекресток, на основании результатов распознавания ситуации в удаленной точке управления, полученных блоком 43 распознавания ситуации в удаленной точке управления. Если будет определено, что ситуация в удаленной точке управления представляет собой ситуацию с выездом транспортного средства на перекресток (S40: ДА), устройство 1 дистанционного управления переходит к этапу S42. Если будет определено, что ситуация в удаленной точке управления не является ситуацией с выездом транспортного средства на перекресток (S40: НЕТ), устройство 1 дистанционного управления завершает текущий процесс.
[0172] На этапе S42 устройство 1 дистанционного управления использует блок 45 прогнозирования времени для определения наличия светофоров на перекрестке. Блок 45 прогнозирования времени определяет наличие светофора на перекрестке на основании результатов распознавания ситуации в удаленной точке управления или места возникновения ситуации в удаленной точке управления с помощью блока 43 распознавания ситуации в удаленной точке управления и картографической информации. Если будет установлено, что на перекрестке имеется светофор (S42: ДА), устройство 1 дистанционного управления переходит к этапу S44. Если будет установлено, что на перекрестке нет светофора (S42: НЕТ), устройство 1 дистанционного управления переходит к этапу S46.
[0173] На этапе S44 устройство 1 дистанционного управления использует блок 45 прогнозирования времени для того, чтобы принять за время начала отслеживания время, наступившее раньше времени прибытия на перекресток на величину первой длительности Pa подготовительного периода. После этого устройство 1 дистанционного управления завершает текущий процесс.
[0174] На этапе S46 устройство 1 дистанционного управления принимает за время начала отслеживания время, лежащее раньше времени прибытия на перекресток на величину второй длительности Pb подготовительного периода, с помощью блока 45 прогнозирования времени. Вторая длительность Pb подготовительного периода меньше первой длительности Pa подготовительного периода. После этого устройство 1 дистанционного управления завершает текущий процесс.
[0175] На ФИГ. 12B изображена блок-схема, показывающая один из примеров прогнозирования времени завершения отслеживания. Процесс прогнозирования времени завершения отслеживания, прогнозирующий время начала отслеживания в ситуации, в которой транспортное средство выезжает на перекресток, в качестве ситуации в удаленной точке управления, будет описана ниже. Процесс прогнозирования времени завершения отслеживания может быть включен, например, в процесс на этапе S16, как показано на ФИГ. 11A.
[0176] Как показано на ФИГ. 12B, устройство 1 дистанционного управления на этапе S50 использует блок 45 прогнозирования времени для определения того, совершает ли беспилотное транспортное средство 2 правый поворот на перекрестке. Блок 45 прогнозирования времени определяет, является ли ситуация в удаленной точке управления ситуацией, в которой беспилотное транспортное средство 2 совершает правый поворот на перекрестке, на основании ситуации в удаленной точке управления, распознанной блоком 43 распознавания ситуации в удаленной точке управления, или целевого маршрута беспилотного транспортного средства 2. Если будет установлено, что беспилотное транспортное средство 2 совершает правый поворот (S50: ДА), устройство 1 дистанционного управления переходит к этапу S52. Если будет установлено, что беспилотное транспортное средство 2 не совершает правый поворот (S50: НЕТ), устройство 1 дистанционного управления переходит к этапу S54.
[0177] На этапе S52 устройство 1 дистанционного управления использует блок 45 прогнозирования времени для того, чтобы принять за время завершения отслеживания время, наступающее позже времени начала отслеживания, в которое транспортное средство выезжает на перекресток, на величину первой длительности Ma периода отслеживания. После этого устройство 1 дистанционного управления завершает текущий процесс.
[0178] На этапе S54 устройство 1 дистанционного управления использует блок 45 прогнозирования времени для того, чтобы принять за время завершения отслеживания время, наступающее позже времени начала отслеживания, в которое транспортное средство выезжает на перекресток, на величину второй длительности Mb периода отслеживания. Вторая длительность Mb отслеживания меньше первой длительности Ma отслеживания. После этого устройство 1 дистанционного управления завершает текущий процесс.
[0179] На ФИГ. 13 изображена блок-схема, показывающая один из примеров отражения задержки установления соединения. Процесс отражения задержки установления соединения может быть включен, например, в процесс на этапе S16, как показано на ФИГ. 11A. Процесс отражения задержки установления соединения может выполняться, например, после процесса прогнозирования времени начала и процесса завершения отслеживания. Процесс прогнозирования времени начала отслеживания, показанный на ФИГ. 12A, может выполняться после отражения задержки установления соединения на длительности подготовительного периода. Кроме того, процесс прогнозирования времени завершения отслеживания, показанный на ФИГ. 12B, может выполняться после отражения задержки установления соединения на длительности периода отслеживания.
[0180] Как показано на ФИГ. 13, устройство 1 дистанционного управления использует блок 45 прогнозирования времени для определения того, равна ли задержка установления соединения, прогнозируемая в ситуации в удаленной точке управления, допустимому пороговому значению на этапе S60, или превышает его. Если будет установлено, что задержка соединения равна допустимому пороговому значению или превышает его (S60: ДА), устройство 1 дистанционного управления переходит к этапу S62. Если будет установлено, что задержка соединения ниже допустимого порогового значения (S60: НЕТ), устройство 1 дистанционного управления завершает текущий процесс.
[0181] На этапе S62 устройство 1 дистанционного управления использует блок 45 прогнозирования времени для прогнозирования времени начала отслеживания путем увеличения длительности подготовительного периода и времени завершения отслеживания путем увеличения длительности периода отслеживания. Иными словами, блок 45 прогнозирования времени увеличивает длительность подготовительного периода для ситуации в удаленной точке управления, если задержка соединения равна допустимому пороговому значению или превышает его, по сравнению со случаем, в котором задержка соединения меньше допустимого порогового значения. Время начала отслеживания сдвинуто назад по сравнению со случаем, в котором задержка соединения меньше допустимого порогового значения. Блок 45 прогнозирования времени увеличивает длительность периода отслеживания для ситуации в удаленной точке управления, если задержка соединения равна допустимому пороговому значению или превышает его, по сравнению со случаем, в котором задержка соединения меньше допустимого порогового значения. Время завершения отслеживания сдвинуто вперед по сравнению со случаем, в котором задержка соединения меньше допустимого порогового значения.
[0182] На ФИГ. 14A изображена блок-схема, показывающая один из примеров настройки допустимого времени отмены. Как показано на ФИГ. 14A, устройство 1 дистанционного управления определяет, передал ли оператор R дистанционного управления команду дистанционного управления на этапе S70 с помощью блока 50 передачи команд дистанционного управления. Блок 50 передачи команд дистанционного управления определяет, передал ли оператор R дистанционного управления команду дистанционного управления, на основании ввода, выполненного оператором R дистанционного управления в блоке 3b ввода команд интерфейса 3 оператора. Если будет установлено, что оператор R дистанционного управления передал команду дистанционного управления (S70: ДА), устройство 1 дистанционного управления переходит к этапу S72. Если будет установлено, что оператор R дистанционного управления не передал команду дистанционного управления (S70: НЕТ), устройство 1 дистанционного управления завершает текущий процесс.
[0183] На этапе S72 устройство 1 дистанционного управления передает команду на беспилотное транспортное средство 2 с помощью блока 50 передачи команд дистанционного управления. Устройство 1 дистанционного управления передает команду управления по сети N. На этапе S74 устройство 1 дистанционного управления задает допустимое время отмены с помощью блока 51 назначения допустимого времени отмены. Блок 51 назначения допустимого времени отмены назначает допустимое время отмены на основании, например, информации о местоположении, картографической информации и состояния движения беспилотного транспортного средства 2. После этого устройство 1 дистанционного управления завершает текущий процесс.
[0184] На ФИГ. 14B изображена блок-схема, показывающая один из примеров процесса передачи команды отмены. Процесс передачи команды отмены выполняется, когда назначено допустимое время отмены.
[0185] Как показано на ФИГ. 14B, устройство 1 дистанционного управления определяет, передал ли оператор R дистанционного управления команду отмены на этапе S80 с помощью блока 52 передачи команды отмены в пределах допустимого времени отмены. Блок 52 передачи команды отмены определяет, передал ли оператор R дистанционного управления команду отмены в пределах допустимого времени отмены, на основании ввода, выполненного оператором R дистанционного управления в блоке 3b ввода команд интерфейса 3 оператора, и допустимого времени отмены. Если будет установлено, что оператор R дистанционного управления передал команду отмены в пределах допустимого времени отмены (S80: ДА), устройство 1 дистанционного управления переходит к этапу S82. Если будет установлено, что оператор R дистанционного управления не передал команду отмены в пределах допустимого времени отмены (S80: НЕТ), устройство 1 дистанционного управления завершает текущий процесс.
[0186] На этапе S82 устройство 1 дистанционного управления передает команду отмены на беспилотное транспортное средство 2 с помощью блока 52 передачи команды отмены. Блок 52 передачи команды отмены передает команду отмены через сеть N. После этого устройство 1 дистанционного управления завершает текущий процесс.
Технический результат системы дистанционного управления транспортным средством в соответствии с первым примером осуществления
[0187] Система 100 дистанционного управления транспортным средством (устройство 1 дистанционного управления) согласно первому примеру осуществления изобретения (см. выше) позволяет распознавать ситуацию в удаленной точке управления, то есть ситуацию, в которой беспилотное транспортное средство 2 должно запросить у оператора R дистанционного управления команду дистанционного управления на движение по целевому маршруту, а также позволяет прогнозировать время начала отслеживания оператором дистанционного управления ситуации в удаленной точке управления на целевом маршруте на основании целевого маршрута беспилотного транспортного средства 2, информации о местоположении беспилотного транспортного средства 2, а также картографической информации. Таким образом, в соответствии с этой системой 100 дистанционного управления транспортным средством периоды отслеживания нескольких беспилотных транспортных средств 2 могут быть назначены одному оператору R дистанционного управления заблаговременно, путем прогнозирования времени начала отслеживания оператором R дистанционного управления ситуации в удаленной точке управления на целевом маршруте. Данная система 100 дистанционного управления транспортным средством, по сравнению с вариантом, в котором решение о назначении оператора дистанционного управления принимается каждый раз, когда с беспилотного транспортного средства 2 поступает запрос на дистанционное управление, позволяет повысить эффективность работы операторов R дистанционного управления за счет назначения периодов отслеживания нескольких беспилотных транспортных средств 2 одному оператору R дистанционного управления таким образом, чтобы несколько беспилотных транспортных средств 2 можно было отслеживать меньшим числом операторов дистанционного управления.
[0188] В данной системе 100 дистанционного управления транспортным средством время, в которое ситуация в удаленной точке управления отражается на беспилотном транспортном средстве 2, может отличаться от времени начала отслеживания оператором R дистанционного управления вследствие задержки установления соединения между оператором R дистанционного управления и беспилотным транспортным средством 2. Это позволяет более точно прогнозировать время начала отслеживания на основании прогноза задержки установления соединения в соответствии с ситуацией в удаленной точке управления на целевом маршруте беспилотного транспортного средства 2, составленного с учетом целевого маршрута и картографической информации, а также на основании прогноза времени начала отслеживания с учетом прогнозируемой задержки установления соединения. В системе 100 дистанционного управления транспортным средством время начала отслеживания сдвинуто с учетом задержки соединения, в результате чего команда дистанционного управления может поступить на беспилотное транспортное средство 2 раньше, чем в ситуации без учета задержки соединения.
[0189] При использовании системы 100 дистанционного управления транспортным средством возможен вариант, в котором команды дистанционного управления, переданные оператором R дистанционного управления, не могут быть отменены вследствие выполнения беспилотным транспортным средством 2 соответствующих команд дистанционного управления. Оператор R дистанционного управления может подтвердить допустимое время отмены, установив допустимое время отмены команды на основании местоположения беспилотного транспортного средства 2 и картографической информации (или окружения беспилотного транспортного средства), а также путем вывода информации о допустимом времени отмены оператору R дистанционного управления.
Второй пример осуществления изобретения
[0190] Ниже будет описана система дистанционного управления транспортным средством в соответствии со вторым примером осуществления изобретения. Система дистанционного управления транспортным средством в соответствии со вторым примером осуществления изобретения отличается от первого примера тем, что по истечении времени с момента начала отслеживания ситуации в удаленной точке управления, оператор R дистанционного управления, не вводящий команду дистанционного управления и отвечающий за ситуацию в удаленной точке управления, будет заменен.
[0191] На ФИГ. 15 изображена схема, иллюстрирующая пример устройства дистанционного управления в соответствии со вторым примером осуществления изобретения. Конфигурация системы дистанционного управления транспортным средством в соответствии со вторым примером осуществления изобретения может соответствовать первому примеру осуществления, за исключением устройства дистанционного управления. Компоненты, совпадающие с первым примером осуществления, имеют такие же ссылочные обозначения, и их раскрытие не будет приводиться повторно.
Конфигурация устройства дистанционного управления согласно второму примеру осуществления изобретения
[0192] В частности, сервер 60 дистанционного управления устройства 201 дистанционного управления, показанного на ФИГ. 15, содержит блок 61 замены оператора дистанционного управления, а блок 62 передачи информации имеет дополнительную функцию по сравнению с сервером 10 дистанционного управления устройства 1 дистанционного управления в соответствии с первым примером осуществления изобретения.
[0193] Блок 61 замены оператора дистанционного управления сконфигурирован для замены оператора дистанционного управления, контролирующего ситуацию в удаленной точке управления, на другого оператора R дистанционного управления, если время, прошедшее с момента начала отслеживания ситуации в удаленной точке управления равно порогу времени, установленному для замены оператора дистанционного управления, или превышает его, и оператор дистанционного управления не вводит команду управления. Порог замены оператора дистанционного управления является заранее заданным. Порог замены оператора дистанционного управления может быть фиксированным или иметь другое значение в зависимости от ситуации в удаленной точке управления. Блок 61 замены оператора дистанционного управления передает полномочия дистанционного управления беспилотным транспортным средством 2 на интерфейс 3 нового оператора R дистанционного управления.
[0194] Блок 61 замены оператора дистанционного управления начинает отсчет времени, прошедшего со времени начала отслеживания, при наступлении времени начала отслеживания ситуации в удаленной точке управления, назначенного блоком 46 распределения периодов отслеживания оператору R дистанционного управления в рамках графика. Когда оператор R дистанционного управления передает команду дистанционного управления, блок 61 замены оператора дистанционного управления прекращает отсчет истекшего времени.
[0195] Если блок 3b ввода команд интерфейса 3 оператора имеет двухступенчатый метод ввода, то блок 61 замены оператора дистанционного управления может прекратить отсчет истекшего времени при вводе первой ступени (например, нажатия кнопки Lb запуска отслеживания, показанной на ФИГ. 5). В этом случае оператор R дистанционного управления может указать на то, что он намерен подать команду дистанционного управления для ситуации в удаленной точке управления с помощью ввода первой ступени, что позволяет избежать ненужной замены оператора дистанционного управления.
[0196] Аналогичным образом блок 61 замены оператора дистанционного управления может прекратить отсчет истекшего времени, когда оператор R дистанционного управления управляет блоком 3b ввода команд (операция, отличающаяся от дистанционного управления). Блок 61 замены оператора дистанционного управления может прекратить отсчет истекшего времени, когда будет установлено, что оператор R дистанционного управления намеревается отслеживать транспортное средство по изображению, снятому камерой наблюдения за оператором R дистанционного управления.
[0197] Если время, истекшее со времени начала отслеживания, равно порогу замены оператора или превышает его, блок 61 замены оператора дистанционного управления заменяет оператора R дистанционного управления, отвечающего за ситуацию в удаленной рабочей точке, другим оператором R дистанционного управления (например, R1 на R2), так как оператор R дистанционного управления, отвечающий в настоящее время за ситуацию, скорее всего, не сможет сформулировать команду дистанционного управления. В качестве нового оператора R дистанционного управления выбирают, например, оператора R дистанционного управления, текущий график отслеживания которого свободен и не содержит запланированного времени начала отслеживания. В альтернативном варианте, при необходимости замены оператора R дистанционного управления, подготавливают резервного оператора R дистанционного управления, на которого заменяют оператора R дистанционного управления, отвечающего за ситуацию.
[0198] Блок 62 передачи информации предоставляет информацию о замене оператора R дистанционного управления. Блок 62 передачи информации может информировать, например, оператора R дистанционного управления, в настоящее время отвечающего за ситуацию, о времени, оставшемся до замены оператора R дистанционного управления. Уведомление может быть реализовано в виде изображения на дисплее или голосового сообщения. Блок 62 передачи информации не обязательно должен уведомлять о времени, оставшемся до замены оператора R дистанционного управления.
[0199] Если время, прошедшее со времени начала отслеживания, равно пороговому значению или превышает его, блок 62 передачи информации предоставляет информацию о беспилотном транспортном средстве 2 новому оператору R дистанционного управления. Блок 62 передачи информации предоставляет информацию о беспилотном транспортном средстве 2 новому оператору R дистанционного управления заблаговременно до того, как время, истекшее со времени начала отслеживания, окажется равно порогу замены оператора или превысит его. Если, например, время, истекшее со времени начала отслеживания равно резервному порогу замены оператора или превышает его, блок 62 передачи информации передает информацию о беспилотном транспортном средстве 2 новому оператору R дистанционного управления. Резервный порог замены оператора представляет собой заранее заданный порог, который меньше порога замены оператора.
Работа устройства дистанционного управления в системе дистанционного управления транспортным средством в соответствии со вторым примером осуществления изобретения
[0200] Работа устройства 201 дистанционного управления в системе дистанционного управления транспортным средством в соответствии со вторым примером осуществления изобретения будет описана со ссылкой на ФИГ. 16. На ФИГ. 16 изображена блок-схема, показывающая один из примеров выполнения замены оператора дистанционного управления. Выполнение замены оператора дистанционного управления начинается, когда наступает время начала отслеживания.
[0201] Как показано на ФИГ. 16, устройство 201 дистанционного управления в соответствии со вторым примером осуществления изобретения использует блок 61 замены оператора дистанционного управления для определения того, выполнил ли оператор R дистанционного управления, отвечающий за ситуацию, ввод первой ступени на этапе S90. Если, например, нажата кнопка Lb начала отслеживания в блоке 3b ввода команд, показанном на ФИГ. 5, блок 61 замены оператора дистанционного управления определяет, что оператор R дистанционного управления выполнил ввод первой ступени. Если будет установлено, что оператор R дистанционного управления выполнил ввод первой ступени (S90: ДА), устройство 201 дистанционного управления завершает текущий процесс. Если будет установлено, что оператор R дистанционного управления не выполнил ввод первой ступени (S90: НЕТ), устройство 201 дистанционного управления переходит к этапу S92.
[0202] На этапе S92 устройство 201 дистанционного управления использует блок 61 замены оператора дистанционного управления для определения того, равно ли время, истекшее со времени начала отслеживания, порогу замены оператора или превышает его, при условии, что оператор R дистанционного управления не подает команду дистанционного управления. Если будет установлено, что время, истекшее со времени начала отслеживания, равно или превышает порог замены оператора (S92: ДА), устройство 201 дистанционного управления переходит к этапу S94. Если будет установлено, что время, истекшее со времени начала отслеживания, меньше порога замены оператора (S92: НЕТ), устройство 201 дистанционного управления завершает текущий процесс и повторяет процесс с этапа S90.
[0203] На этапе S94 устройство 201 дистанционного управления использует блок 61 замены оператора дистанционного управления для замены оператора R дистанционного управления, отвечающего за ситуацию. Блок 62 передачи информации предоставляет информацию о замене оператора R дистанционного управления. После этого устройство 201 дистанционного управления завершает текущий процесс. Процесс на этапе S90 не обязателен.
Технический результат системы дистанционного управления транспортным средством в соответствии со вторым примером осуществления
[0204] В системе дистанционного управления транспортным средством (устройстве 201 дистанционного управления) согласно второму примеру осуществления (см. выше), если оператор R дистанционного управления не может надлежащим образом подать команду дистанционного управления в течение определенного периода времени, то оператор R дистанционного управления, отвечающий за ситуацию, может быть заменен другим оператором R дистанционного управления. Таким образом, можно предотвратить ситуацию, в которой беспилотное транспортное средство 2 не может получать команды дистанционного управления в течение длительного времени вследствие состояния оператора R дистанционного управления.
Третий пример осуществления изобретения
[0205] Ниже будет описана система дистанционного управления транспортным средством в соответствии с третьим примером осуществления изобретения. Система дистанционного управления транспортным средством в соответствии с третьим примером осуществления изобретения отличается от первого примера тем, что план скорости и/или целевой маршрут беспилотного транспортного средства 2 изменяются в соответствии с количеством перекрытий периодов ситуаций в удаленных точках управления нескольких беспилотных транспортных средств для построения графика отслеживания оператора R дистанционного управления.
[0206] На ФИГ. 17 изображена блок-схема, иллюстрирующая пример устройства дистанционного управления в соответствии с третьим примером осуществления изобретения. Конфигурация системы дистанционного управления транспортным средством в соответствии с третьим примером осуществления изобретения может соответствовать примеру осуществления, за исключением устройства дистанционного управления. Компоненты, совпадающие с первым примером осуществления, имеют такие же ссылочные обозначения, и их раскрытие не будет приводиться повторно.
Конфигурация устройства дистанционного управления согласно третьему примеру осуществления изобретения
[0207] В частности, сервер 70 дистанционного управления устройства 301 дистанционного управления, показанного на ФИГ. 17, содержит блок 71 распределения периодов отслеживания, выполняющий другую функцию по сравнению с сервером 10 дистанционного управления устройства 1 дистанционного управления согласно первому примеру осуществления изобретения.
[0208] В частности, помимо функции первого примера осуществления изобретения, блок 71 распределения периодов отслеживания определяет, равно ли пороговое значение количества перекрытий периодов ситуаций в удаленных точках управления нескольких беспилотных транспортных средств 2 порогу количества операторов или превышает его. В число нескольких беспилотных транспортных средств 2 могут входить, например, беспилотные транспортные средства 2, для которых установлен график отслеживания. В число нескольких беспилотных транспортных средств 2 могут входить все беспилотные транспортные средства 2, подключенные к устройству 301 дистанционного управления. Блок 71 распределения периодов отслеживания выполняет вышеописанное определение на основании времени начала и завершения отслеживания каждой ситуации в удаленной точке управления беспилотных транспортных средств 2.
[0209] Под количеством перекрытий периодов ситуаций в удаленных точках управления понимают количество перекрывающихся периодов отслеживания для ситуации в удаленной точке управления. Например, в ситуации, показанной на ФИГ. 7A, количество перекрытий периодов между моментами t2 и t3 равно двум. Количество перекрытий периодов между моментами t3 и t4 равно единице (то есть периоды отслеживания не перекрываются). Порог количества операторов является заранее заданной величиной. Порог количества операторов, по существу, не ограничен; любое число может быть установлено в качестве порога количества операторов. Порог количества операторов может быть установлен, например, на основании информации о графике работы оператора R дистанционного управления, хранящейся в базе 4 данных операторов дистанционного управления. Порог количества операторов может представлять собой значение, изменяющееся в зависимости от диапазона времени в соответствии с количеством операторов R дистанционного управления, которые могут работать в каждом диапазоне времени.
[0210] Когда количество перекрытий периодов ситуаций в удаленных точках управления равно или превышает порог количества операторов, блок 71 распределения периодов отслеживания изменяет план скорости или целевого маршрута, по меньшей мере, одного целевого транспортного средства из нескольких беспилотных транспортных средств 2, причем количество перекрытий периодов меньше порога количества операторов.
[0211] Целевое транспортное средство является таким транспортным средством из беспилотных транспортных средств 2, для которого план скорости или целевой маршрут должны быть изменены и передана команда дистанционного управления. Целевым транспортным средством может служить, например, беспилотное транспортное средство 2, для которого период отслеживания перекрывается с периодом, в котором количество перекрытий периодов равно порогу количества операторов или превышает его.
[0212] Целевое транспортное средство можно определить, исходя из влияния изменений в поведении пассажиров. Если, например, целевым транспортным средством может быть транспортное средство с пассажиром и транспортное средство без пассажира, то блок 71 распределения периодов отслеживания выбирает транспортное средство без пассажира в качестве целевого транспортного средства. Блок 71 распределения периодов отслеживания может, предпочтительно, установить в качестве целевого транспортного средства транспортное средство, которое прибудет в пункт назначения позже. Если транспортное средство, прибывающее в пункт назначения раньше заранее заданного порога, и транспортное средство, прибывающее в пункт назначения во время, соответствующее заранее заданному порогу, или позже него, могут быть выбраны в качестве целевого транспортного средства, блок 71 распределения периодов отслеживания может, предпочтительно, установить в качестве целевого транспортного средства транспортное средство, прибывающее в пункт назначения во время, соответствующее заданному порогу, или позже него. Если транспортное средство, движущееся по фиксированному маршруту (например, рейсовый автобус), и транспортное средство, движущееся по случайному маршруту (например, такси), могут быть выбраны в качестве целевого транспортного средства, блок 71 распределения периодов отслеживания может, предпочтительно, установить в качестве целевого транспортного средства транспортное средство, движущееся по случайному маршруту. Блок 71 распределения периодов отслеживания изменяет план скорости или целевой маршрут заданного транспортного средства путем передачи на целевое транспортное средство команды на изменение движения транспортного средства, в том числе на изменение плана скорости или целевого маршрута целевого транспортного средства.
[0213] Блок 71 распределения периодов отслеживания изменяет количество перекрытий периодов таким образом, чтобы оно было меньше порога количества операторов, например, за счет увеличения скорости движения целевого транспортного средства до и после периода отслеживания. На ФИГ. 18 изображен план одного из целевых маршрутов трех беспилотных транспортных средств 2A, 2B, 2C. Беспилотное транспортное средство 2A имеет целевой маршрут Ra, в соответствии с которым транспортное средство совершает правый поворот на первом перекрестке, а затем правый поворот на втором перекрестке. Беспилотное транспортное средство 2B имеет целевой маршрут Rb, в соответствии с которым транспортное средство совершает правый поворот на первом перекрестке. Предполагается, что беспилотное транспортное средство 2B движется с низкой скоростью и требует более длительного периода отслеживания, так как вокруг перекрестка движется много пешеходов. Беспилотное транспортное средство 2C имеет целевой маршрут Rc, в соответствии с которым транспортное средство совершает правый поворот на первом перекрестке, а затем правый поворот на втором перекрестке.
[0214] На ФИГ. 19 изображен график, отображающий план скорости движения беспилотного транспортного средства 2A, график, отображающий план скорости движения беспилотного транспортного средства 2B, график, отображающий план скорости движения беспилотного транспортного средства 2C, и график, отображающий периоды отслеживания беспилотных транспортных средств 2A, 2B, 2C.
[0215] На диаграмме периодов отслеживания беспилотных транспортных средств 2A, 2B, 2C (см. ФИГ. 19) показан период A1 отслеживания, соответствующий беспилотному транспортному средству 2A, совершающему правый поворот на первом перекрестке, период A2 отслеживания, соответствующий беспилотному транспортному средству 2A, совершающему правый поворот на втором перекрестке, период B1 отслеживания, соответствующий беспилотному транспортному средству 2B, совершающему правый поворот на перекрестке, период C1 отслеживания, соответствующий беспилотному транспортному средству 2C, совершающему правый поворот на первом перекрестке, и период C2 отслеживания, соответствующий беспилотному транспортному средству 2C, совершающему правый поворот на втором перекрестке. Для простоты описания ситуация в удаленной точке управления не включает в себя ситуацию, в которой транспортное средство выезжает на перекресток.
[0216] На диаграмме периодов отслеживания беспилотных транспортных средств 2A, 2B, 2C (см. ФИГ. 19) временем начала периода A1 отслеживания является T1, временем начала периода B1 отслеживания является T2, временем завершения периода A1 отслеживания является T3, временем начала периода C1 отслеживания является T4, временем завершения периода C1 отслеживания является T5, временем начала периода A2 отслеживания является T6, временем начала периода C2 отслеживания является T7, временем завершения периода B1 отслеживания является T8, временем завершения периода A2 отслеживания является T9, и временем завершения периода C2 отслеживания является T10. Моменты T1-T10 времени расположены последовательно.
[0217] Как показано на диаграмме периодов отслеживания беспилотных транспортных средств 2A, 2B, 2C (см. ФИГ. 19), период A1 отслеживания беспилотного транспортного средства 2A и период B1 отслеживания беспилотного транспортного средства 2B перекрываются в промежутке между моментами T2 и T3 (количество перекрытий периодов – два). Кроме того, период B1 отслеживания беспилотного транспортного средства 2B и период C1 отслеживания беспилотного транспортного средства 2C перекрываются в промежутке между моментами T4 и T5 времени (количество перекрытий периодов – два). Период B1 отслеживания беспилотного транспортного средства 2B и период A2 отслеживания беспилотного транспортного средства 2A перекрываются в промежутке между моментами T6 и T8 времени (количество перекрытий периодов – два). Кроме того, период B1 отслеживания беспилотного транспортного средства 2B, период A2 отслеживания беспилотного транспортного средства 2A и период C1 отслеживания беспилотного транспортного средства 2C перекрываются в промежутке между моментами T7 и T8 (количество перекрытий периодов – три). Период A2 отслеживания беспилотного транспортного средства 2A и период C1 отслеживания беспилотного транспортного средства 2C перекрываются в промежутке между моментами T7 и T9 времени (количество перекрытий периодов – два).
[0218] Блок 71 распределения периодов отслеживания рассчитывает количество перекрытий периодов в ситуации, показанной на диаграмме периодов отслеживания беспилотных транспортных средств 2A, 2B, 2C (см. выше на ФИГ. 19). Блок 71 распределения периодов отслеживания устанавливает порог количества операторов равный трем, потому что, например, имеются только два оператора R дистанционного управления. В этом случае блок 71 распределения периодов отслеживания определяет, что количество перекрытий периодов в промежутке между моментами Т7 и Т8 равно порогу количества операторов или превышает его.
[0219] Если будет установлено, что количество перекрытий периодов в промежутке между моментами Т7 и Т8 равно порогу количества операторов или превышает его, блок 71 распределения периодов отслеживания выполняет команду изменения скорости беспилотного транспортного средства 2А, выполняющего роль целевого транспортного средства. На ФИГ. 20 изображен график, отображающий измененный план скорости движения беспилотного транспортного средства 2A, график, отображающий план скорости движения беспилотного транспортного средства 2B, график, отображающий план скорости движения беспилотного транспортного средства 2C, и график, отображающий измененные периоды отслеживания беспилотных транспортных средств 2A, 2B и 2C. График, отображающий план скорости беспилотного транспортного средства 2B согласно ФИГ. 20, и график, отображающий план скорости беспилотного транспортного средства 2C согласно ФИГ. 20, совпадают с графиком, отображающим план скорости беспилотного транспортного средства 2B согласно ФИГ. 19 и графиком, отображающим план скорости беспилотного транспортного средства 2C согласно ФИГ. 19, соответственно.
[0220] Блок 71 распределения периодов отслеживания изменяет план скорости движения беспилотного транспортного средства 2A, как показано, например, на графике с измененным планом скорости движения беспилотного транспортного средства 2A согласно ФИГ. 20. На графике с измененным планом скорости беспилотного транспортного средства 2А согласно ФИГ. 20 беспилотное транспортное средство 2А разгоняется умеренно с момента Т4 времени. Соответственно, время T6 начала отслеживания периода A2 отслеживания беспилотного транспортного средства 2A является временем T6a начала отслеживания, описанным ниже. Время T6a начала отслеживания лежит позже времени T8 завершения периода B1 отслеживания беспилотного транспортного средства 2B. После этого, как показано на диаграмме периодов отслеживания беспилотных транспортных средств 2A, 2B, 2C (см. ФИГ. 20), период B1 отслеживания беспилотного транспортного средства 2B и период A2 отслеживания беспилотного транспортного средства 2A не перекрываются, и количество перекрытий периодов меньше порога количества операторов. Блок 71 распределения периодов отслеживания изменяет количество перекрытий периодов таким образом, чтобы оно было меньше порога количества операторов, изменяя скорость движения беспилотного транспортного средства 2A. Прогнозирование нового времени T6a начала отслеживания может выполняться с помощью блока 45 прогнозирования времени.
[0221] Блок 71 распределения периодов отслеживания может выбрать беспилотное транспортное средство 2B в качестве целевого транспортного средства. На ФИГ. 21 изображен график, отображающий план скорости движения беспилотного транспортного средства 2A, график, отображающий измененный план скорости движения беспилотного транспортного средства 2B, график, отображающий план скорости движения беспилотного транспортного средства 2C, и график, отображающий измененные периоды отслеживания беспилотных транспортных средств 2A, 2B и 2C. График, отображающий план скорости беспилотного транспортного средства 2A согласно ФИГ. 21, и график, отображающий измененный план скорости беспилотного транспортного средства 2C согласно ФИГ. 21, совпадают с графиком, отображающим план скорости беспилотного транспортного средства 2A согласно ФИГ. 19 и графиком, отображающим план скорости беспилотного транспортного средства 2C согласно ФИГ. 19, соответственно.
[0222] Блок 71 распределения периодов отслеживания изменяет план скорости движения беспилотного транспортного средства 2B, как показано, например, на графике с измененным планом скорости движения беспилотного транспортного средства 2B согласно ФИГ. 21. На графике с измененным планом скорости беспилотного транспортного средства 2B согласно ФИГ. 21, беспилотное транспортное средство 2B разгоняется быстрее. Соответственно, время T8 завершения периода B1 отслеживания беспилотного транспортного средства 2B является временем T8a завершения отслеживания, наступающим раньше времени T8 завершения отслеживания. Время T8a завершения отслеживания лежит позже времени T7 начала периода C2 отслеживания беспилотного транспортного средства 2C. После этого, как показано на диаграмме периодов отслеживания беспилотных транспортных средств 2A, 2B, 2C (см. ФИГ. 21), период B1 отслеживания беспилотного транспортного средства 2B и период C2 отслеживания беспилотного транспортного средства 2C не перекрываются, и количество перекрытий периодов меньше порога количества операторов. Прогнозирование нового времени T8a завершения отслеживания может выполняться с помощью блока 45 прогнозирования времени.
[0223] Блок 71 распределения периодов отслеживания может изменить план скорости беспилотного транспортного средства 2C или план скорости, по меньшей мере, двух из беспилотных транспортных средств 2A-2C. Блок 71 распределения периодов отслеживания может изменить план скорости любого из беспилотных транспортных средств 2A-2C таким образом, чтобы количество перекрытий периодов было меньше порога количества операторов.
[0224] Если план скорости транспортного средства не получен в составе информации об автономном движении и будет установлено, что количество перекрытий периодов ситуаций в удаленных точках управления равно или превышает порог количества операторов, блок 71 распределения периодов отслеживания может запросить передачу плана скорости транспортного средства от беспилотного транспортного средства 2, период отслеживания которого перекрывается с периодом, в котором количество перекрытий периодов равно или превышает порог количества операторов. Блок 45 прогнозирования времени повторно прогнозирует время начала и завершения отслеживания беспилотного транспортного средства 2, используя план скорости транспортного средства. Если будет установлено, что количество перекрытий периодов ситуаций в удаленных точках управления равно или превышает порог количества операторов даже после повторного прогнозирования с использованием плана скорости транспортного средства, блок 71 распределения периодов отслеживания может скорректировать количество перекрытий периодов ситуаций в удаленных точках управления таким образом, чтобы оно было меньше порога количества операторов путем изменения плана скорости транспортного средства.
[0225] Блок 71 распределения периодов отслеживания не обязательно должен выдавать подробную инструкцию по изменению плана скорости движения транспортного средства. Если будет установлено, что количество перекрытий периодов ситуаций в удаленных точках управления равно или превышает порог количества операторов, блок 71 распределения периодов отслеживания может запросить изменение плана скорости беспилотного транспортного средства 2 (например, за счет снижения или увеличения скорости транспортного средства или ускорения в указанном диапазоне времени), период отслеживания которого перекрывается с периодом, в котором количество перекрытий периодов равно или превышает порог количества операторов, таким образом, чтобы периоды отслеживания более не перекрывались. После получения измененного плана скорости беспилотного транспортного средства 2 блок 71 распределения периодов отслеживания повторно определяет, равно или превышает пороговое значение количества перекрытий периодов ситуаций в удаленных точках управления порог количества операторов. Если количество перекрытий периодов ситуаций в удаленных точках управления равно или превышает порог количества операторов, блок 71 распределения периодов отслеживания повторно подает команду изменении плана скорости транспортного средства таким образом, чтобы периоды отслеживания более не перекрывались. Блок 71 распределения периодов отслеживания завершает корректирование периодов отслеживания, когда количество перекрытий периодов ситуаций в удаленных точках управления меньше порога количества операторов.
[0226] Блок 71 распределения периодов отслеживания может изменить целевой маршрут вместо плана скорости движения транспортного средства. Если, например, план скорости движения беспилотного транспортного средства 2 не получен, блок 71 распределения периодов отслеживания корректирует график отслеживания, изменяя целевой маршрут.
[0227] На ФИГ. 22 изображен план, описывающий пример изменения целевого маршрута. Как показано на ФИГ. 22, блок 71 распределения периодов отслеживания может изменить целевой маршрут Rc беспилотного транспортного средства 2C на новый целевой маршрут Rcn (объездной целевой маршрут). На новом целевом маршруте Rcn беспилотное транспортное средство 2C движется прямо через перекресток, на котором транспортное средство сделало бы правый поворот на целевом маршруте Rc, и совершает правый поворот на следующем перекрестке. Соответственно, время T7 начала периода C2 отслеживания, соответствующее беспилотному транспортному средству 2C, совершающему правый поворот на перекрестке, сдвигается дальше времени T8 завершения периода B1 отслеживания беспилотного транспортного средства 2B таким образом, чтобы периоды B1 и C2 отслеживания более не перекрывались.
[0228] Блок 71 распределения периодов отслеживания может выбрать в качестве целевого транспортного средства для изменения целевого маршрута целевое транспортное средство, способное вернуться на исходный целевой маршрут даже после выполнения объезда. Если к пункту назначения ведет другой маршрут, блок 71 распределения периодов отслеживания не должен инициировать возврат транспортного средства на исходный целевой маршрут. Блок 71 распределения периодов отслеживания может выдавать команды на движение целевого транспортного средства, изменяя как план скорости транспортного средства, так и целевой маршрут.
Работа системы дистанционного управления транспортным средством в соответствии с третьим примером осуществления изобретения
[0229] Работа устройства 301 дистанционного управления в системе дистанционного управления транспортным средством в соответствии с третьим примером осуществления изобретения будет описана со ссылкой на ФИГ. 23. На ФИГ. 23 изображена блок-схема, иллюстрирующая пример определения количества перекрытий периодов. Определение количества перекрытий периодов может быть включено, например, в процесс на этапе S18, показанный на ФИГ. 11A.
[0230] Как показано на ФИГ. 17, устройство 301 дистанционного управления согласно третьему примеру осуществления на этапе S100 использует блок 71 распределения периодов отслеживания, определяющий, равно ли пороговое значение количества перекрытий периодов ситуаций в удаленных точках управления нескольких беспилотных транспортных средств 2 порогу количества операторов или превышает его. Блок 71 распределения периодов отслеживания рассчитывает количество перекрытий периодов ситуаций в удаленной точке управления на основании времени начала и завершения отслеживания каждой ситуации в удаленной точке управления беспилотного транспортного средства 2. Если будет установлено, что количество перекрытий периодов ситуаций в удаленной точке управления равно или превышает порог количества операторов (S100: ДА), устройство 301 дистанционного управления переходит к этапу S102. Если будет установлено, что количество перекрытий периодов ситуаций в удаленной точке управления ниже порога количества операторов (S102: НЕТ), устройство 301 дистанционного управления завершает текущий процесс. Случай, в котором определено, что количество перекрытий периодов ситуаций в удаленных точках управления ниже порога количества операторов, представляет собой, например, случай, в котором количество перекрытий периодов ниже порога количества операторов во всех диапазонах времени, для которых установлен график отслеживания.
[0231] На этапе S102 устройство 301 дистанционного управления использует блок 71 распределения периодов отслеживания для передачи целевому транспортному средству команды на изменение скорости движения транспортного средства для изменения плана скорости или целевого маршрута целевого транспортного средства. Блок 71 распределения периодов отслеживания изменяет количество перекрытий периодов таким образом, чтобы оно было меньше порога количества операторов, изменяя план скорости движения или целевой маршрут целевого транспортного средства. Беспилотное транспортное средство 2 (целевое транспортное средство), на которое была передана команда на изменение режима движения транспортного средства, изменяет план скорости движения или целевой маршрут в соответствии с командой на изменение режима движения транспортного средства.
Технический результат системы дистанционного управления транспортным средством в соответствии с третьим примером осуществления
[0232] В данной системе дистанционного управления транспортным средством (устройстве 301 дистанционного управления) согласно третьему примеру осуществления изобретения (см. выше), в случае, когда будет определено, что количество перекрытий периодов ситуаций в удаленных точках управления нескольких беспилотных транспортных средств 2 равно заданному порогу количества операторов дистанционного управления или превышает его, план скорости движения или целевой маршрут целевого транспортного средства изменяют таким образом, чтобы количество перекрытий периодов было меньше порога количества операторов. Таким образом, можно предотвратить перекрытие задач отслеживания беспилотных транспортных средств 2 за пределами заданного порога количества операторов.
[0233] В тексте заявки были описаны предпочтительные примеры осуществления настоящего изобретения, не носящие ограничительного характера. Настоящее изобретение может быть реализовано не только в описанных выше примерах осуществления, но и в вариантах, отличающихся от них, с внесением изменений и усовершенствований на основании знаний специалистов в данной области техники. Ниже будут раскрыты примеры с внесенными в систему изменениями.
[0234] Признаки системы дистанционного управления транспортным средством согласно второму и третьему примерам осуществления изобретения могут использоваться совместно. Например, блок 71 распределения периодов отслеживания согласно третьему примеру осуществления изобретения может использоваться в системе дистанционного управления транспортным средством согласно второму примеру осуществления изобретения.
[0235] Устройство 1 дистанционного управления не обязательно должно содержать блок 44 прогнозирования задержки установления соединения. В этом случае процесс на этапе S14, показанном ФИГ. 11A, не требуется. Блок 45 прогнозирования времени может прогнозировать время начала и/или завершения отслеживания без учета задержки установления соединения, соответствующей ситуации в удаленной точке управления. В это время длительность подготовительного периода может быть фиксированной величиной. Блок 45 прогнозирования времени может принять за время начала отслеживания время прибытия беспилотного транспортного средства 2 в место возникновения ситуации в удаленной точке управления. Устройство 1 дистанционного управления не обязательно должно содержать блок 42 получения информации о дорожной обстановке.
[0236] Альтернативно блок 45 прогнозирования времени может спрогнозировать время начала и/или завершения отслеживания ситуации в удаленной точке управления на основании задержки установления соединения, измеренной в настоящее время между беспилотным транспортным средством 2 и устройством 1 дистанционного управления, вместо использования расчетного значения.
[0237] В качестве задержки установления соединения в этом случае, например, можно использовать задержку в очереди (задержку из-за затора на дороге). Для измерения задержки в очереди можно использовать активное измерение, при котором измерительные пакеты передаются в сеть и измеряются, или пассивное измерение, при котором состояние соединения отслеживается путем установки измерительного инструмента или программного обеспечения в сети. Также возможно использование VPS, в которых измеряется время прохождения (RTT) пакетов различного размера в обоих направлениях между беспилотным транспортным средством 2 и устройством 1 дистанционного управления. Под RTT понимают сумму задержки передачи (задержки, зависящей от размера пакета), задержки распространения (задержки, зависящей от физического пути) и задержки очереди (стохастически изменяемой задержки) для каждого размера пакета. Поскольку измеренное минимальное RTT представляет собой задержку без учета задержки в очереди (сумма задержки передачи и распространения), то задержку в очереди рассчитывают как (наблюдаемое RTT) - (минимальное RTT). Кроме того, для измерения текущей задержки установления соединения можно использовать различные известные методы.
[0238] Блок 45 прогнозирования времени прогнозирует время начала и/или завершения отслеживания с учетом измеренной в настоящее время задержки установления соединения, которая возникнет в будущей ситуации в удаленной точке управления. Способ использования задержки установления соединения (текущее измеренное значение) при прогнозировании времени начала и завершения отслеживания может совпадать со способом прогнозирования задержки установления соединения (прогнозируемое значение), описанным в первом примере осуществления. Например, длительность подготовительного периода увеличивают в ситуации в удаленной точке управления с увеличенной задержкой установления соединения, поэтому время передачи информации оператору R дистанционного управления может быть увеличено путем сдвига времени начала отслеживания назад. Аналогичным образом, длительность периода отслеживания увеличивают в ситуации в удаленной точке управления с увеличенной задержкой установления соединения, при условии, что оператор R дистанционного управления может надлежащим образом отслеживать изменения в ситуации беспилотного транспортного средства 2 после подачи команды дистанционного управления.
[0239] Блок 45 прогнозирования времени не обязательно должен рассчитывать время прибытия беспилотного транспортного средства 2 в место возникновения ситуации в удаленной точке управления и не обязательно должен использовать подготовительный период. Блок 45 прогнозирования времени может непосредственно рассчитывать время начала отслеживания на основании информации о местоположении беспилотного транспортного средства 2, целевого маршрута беспилотного транспортного средства 2 и картографической информации.
[0240] Блок 45 прогнозирования времени может корректировать время начала отслеживания в соответствии с изменением курса (маршрут автономного движения и план скорости транспортного средства) беспилотного транспортного средства 2 и/или целевого маршрута. Изменения курса и целевого маршрута вызваны различными факторами, которые невозможно предсказать по картографической информации (например, новые заторы и движущиеся объекты, включая другие транспортные средства и пешеходов).
[0241] Блок 45 прогнозирования времени может корректировать время начала и завершения отслеживания беспилотного транспортного средства 2 в зависимости от окружения беспилотного транспортного средства 2. При наличии транспортного средства, движущегося впереди со скоростью ниже заданной скорости транспортного средства и распознанного как окружение беспилотного транспортного средства 2, блок 45 прогнозирования времени может спрогнозировать время прибытия в место возникновения ситуации в удаленной точке управления со скоростью движущегося впереди транспортного средства, приняв ее за скорость беспилотного транспортного средства 2, и скорректировать время начала отслеживания. Если ситуация в удаленной точке управления представляет собой ситуацию, в которой транспортное средство совершает правый поворот на перекрестке, блок 45 прогнозирования времени может скорректировать время завершения отслеживания в соответствии с количеством находящихся впереди транспортных средств, ожидающих возможности выполнения правого поворота, после выезда беспилотного транспортного средства 2 на перекресток.
[0242] Устройство 1 дистанционного управления не обязательно должно содержать блок 51 назначения допустимого времени отмены. Устройство 1 дистанционного управления может передавать команду отмены на беспилотное транспортное средство 2, когда оператор R дистанционного управления передает команду отмены без установки допустимого времени отмены. Беспилотное транспортное средство 2 может определить доступность отмены. Допустимое время отмены может быть фиксированным значением. Кроме того, устройство 1 дистанционного управления не обязательно должно позволять оператору R дистанционного управления передавать команду отмены. В этом случае не требуется блок 52 передачи команды отмены.
[0243] Блок 35 определения запроса команды управления беспилотного транспортного средства 2 не обязательно должен запрашивать команду управления, даже если беспилотное транспортное средство 2 находится в ситуации удаленной точки управления. Если надежность автономного движения равна или превышает пороговое значение, блок 35 определения запроса команды управления может определить, что команда управления не требуется. Надежность автономного движения может быть определена известными методами.
[0244] Например, если надежность распознавания светофоров равна или превышает пороговое значение в ситуации, в которой транспортное средство проезжает светофор, блок 35 определения запроса команды управление может определить, что команда управления не требуется. В этом случае беспилотное транспортное средство 2 автоматически продолжает движение или останавливается в зависимости от результата распознавания сигнала светофора. Надежность распознавания сигнала светофора может быть определена известными методами. Если будет установлено, что сигнал светофора запрещает движение транспортного средства (например, красный свет), блок 35 определения запроса команды управления может определить, что команда управления не требуется. Если будет установлено, что железнодорожный переезд закрыт шлагбаумом, блок 35 определения запроса команды управления может определить, что команда управления не требуется.
[0245] Устройство 1 дистанционного управления может быть сконфигурировано так, что оператор R дистанционного управления не дает команду дистанционного управления, если беспилотное транспортное средство 2 не передает запрос на команду управления. Даже если беспилотное транспортное средство 2 не передает запрос на команду управления, устройство 1 дистанционного управления может позволять оператору R дистанционного управления отслеживать транспортное средство. Даже если беспилотное транспортное средство 2 не передает запрос на команду управления, устройство 1 дистанционного управления может подавать на беспилотное транспортное средство 2 команду, устанавливающую приоритет команд дистанционного управления, подаваемых оператором R дистанционного управления.
[0246] Беспилотное транспортное средство 2 не обязательно должно содержать блок 35 определения запроса команды управления. Беспилотное транспортное средство 2 может быть сконфигурировано так, что оно не запрашивает команду дистанционного управления. В этом случае необходимость команды дистанционного управления определяется устройством 1 дистанционного управления в соответствии, например, с местоположением беспилотного транспортного средства 2.
[0247] Модифицированные примеры устройства 1 дистанционного управления применимы к устройствам 201 и 301 дистанционного управления.
Реферат
Изобретение относится к системе дистанционного управления транспортным средством и устройству дистанционного управления. Система дистанционного управления транспортным средством содержит блок распознавания ситуации в удаленной точке управления, сконфигурированный для распознавания ситуации в удаленной точке управления на целевом маршруте, блок прогнозирования времени, сконфигурированный для прогнозирования времени начала и времени завершения отслеживания оператором дистанционного управления ситуации в удаленной точке управления на целевом маршруте, с учетом заданной скорости транспортного средства или плана скорости движения беспилотного транспортного средства на основании целевого маршрута и блок распределения периодов отслеживания, сконфигурированный для распределения периодов отслеживания по нескольким операторам дистанционного управления на основании времени начала и времени завершения отслеживания ситуации в удаленных точках управления для нескольких беспилотных транспортных средств. Устройство дистанционного управления для передачи оператором дистанционного управления команды дистанционного управления беспилотным транспортным средством в соответствии с ситуацией, в которой находится беспилотное транспортное средство. Достигается своевременное отслеживание нескольких беспилотных транспортных средств одному оператору. 2 н. и 4 з.п. ф-лы, 29 ил.

Комментарии