Устройство управления автономным транспортным средством и способ управления автономным транспортным средством - RU2700318C1
Код документа: RU2700318C1
Чертежи
Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления автономным транспортным средством и к способу управления автономным транспортным средством для управления автономным транспортным средством.
Уровень техники
[0002] Автономные транспортные средства предложены с тем, чтобы автономно двигаться по предварительно определенным маршрутам при обнаружении окружающих условий. Дополнительно, раскрыта технология, в которой водитель за пределами транспортного средства удерживает удаленный контроллер, чтобы выполнять простые операции на удаленном контроллере таким образом, что транспортное средство может перемещаться при сохранении своей позиции относительно удаленного контроллера (см. патентный документ 1).
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2001-033256
Сущность изобретения
Техническая задача
[0004] Технология, раскрытая в патентном документе 1, не управляет автономным транспортным средством в ходе движения, но предпринимает ограниченное действие, такое как парковка, посредством простых операций. Иногда желательно, чтобы автономные транспортные средства ездили в соответствии с операциями водителем в зависимости от обстоятельств.
[0005] Ввиду вышеизложенных проблем, настоящее изобретение предоставляет устройство управления автономным транспортным средством и способ управления автономным транспортным средством, допускающие повышение безопасности автономного транспортного средства.
Решение задачи
[0006] Устройство управления автономным транспортным средством устанавливается в автономном транспортном средстве, имеющем два режима автономного движения из первого режима автономного движения для движения без операции водителя и второго режима автономного движения для движения в соответствии с операцией водителя, и выполненном с возможностью задавать рабочий участок согласно состоянию движения и окружающему состоянию и управлять автономным транспортным средством таким образом, что оно движется во втором режиме автономного движения, в соответствии с операцией на функциональном модуле водителя в течение периода, в который автономное транспортное средство расположено в рабочем участке.
Преимущества изобретения
[0007] Настоящее изобретение может предоставлять устройство управления автономным транспортным средством и способ управления автономным транспортным средством для автономного переключения между режимами движения в зависимости от операции водителя таким образом, чтобы повышать безопасность автономного транспортного средства.
Краткое описание чертежей
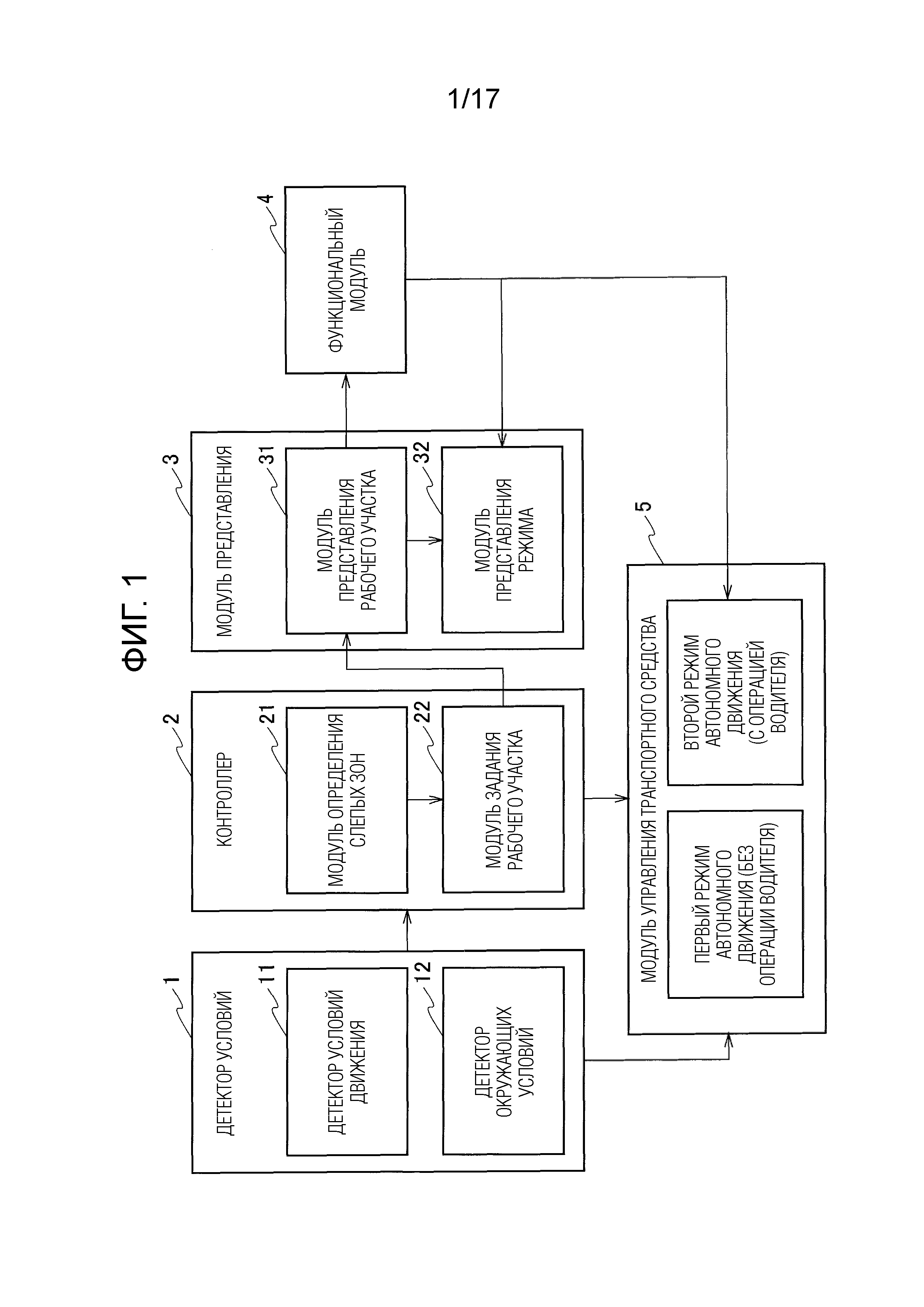
[0008] Фиг. 1 является блок-схемой, описывающей конфигурацию устройства управления автономным транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является видом, иллюстрирующим функциональный модуль в устройстве управления автономным транспортным средством согласно первому варианту осуществления настоящего изобретения.
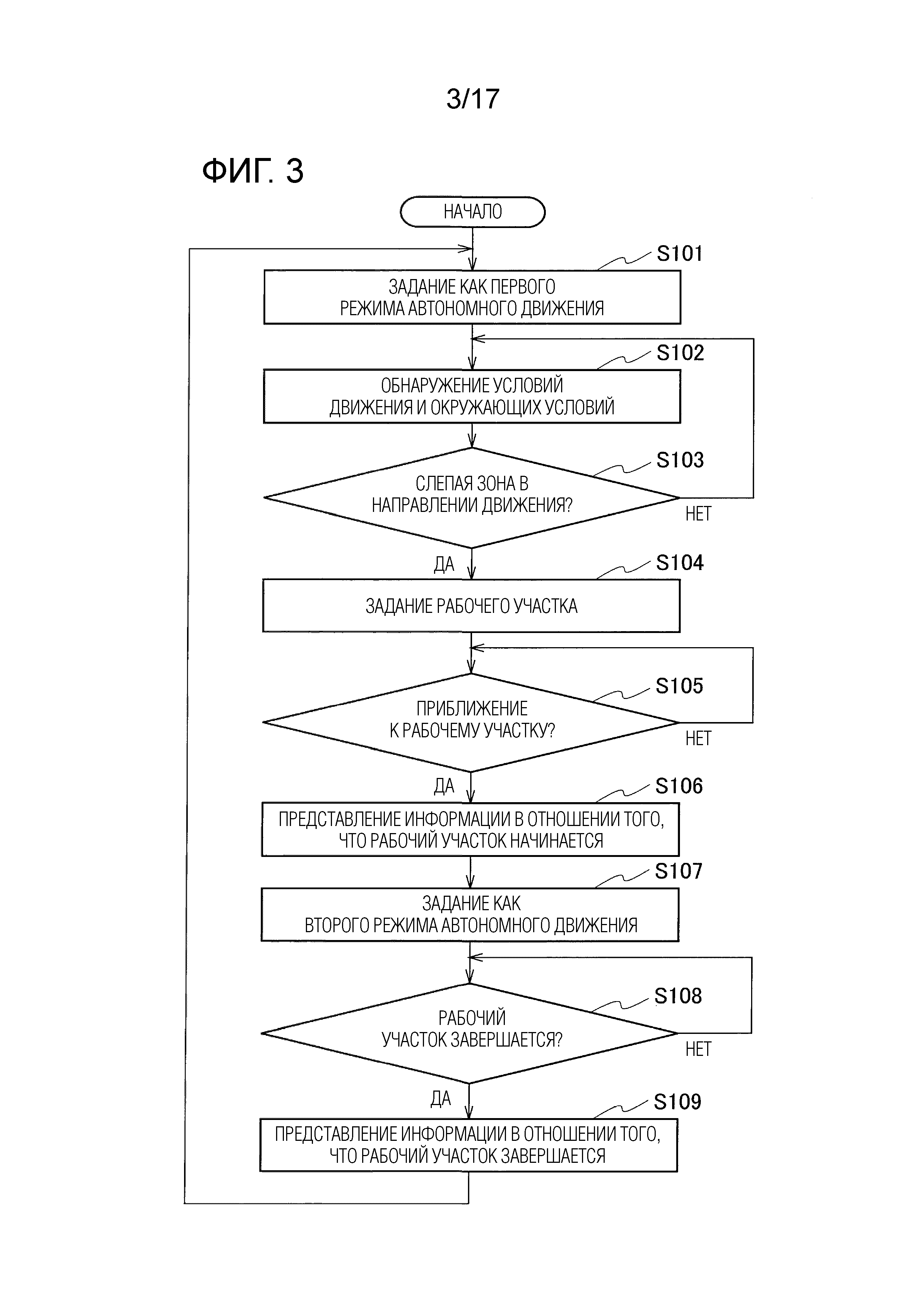
Фиг. 3 является блок-схемой последовательности операций способа для описания способа управления автономным транспортным средством с использованием устройства управления автономным транспортным средством согласно первому варианту осуществления настоящего изобретения.
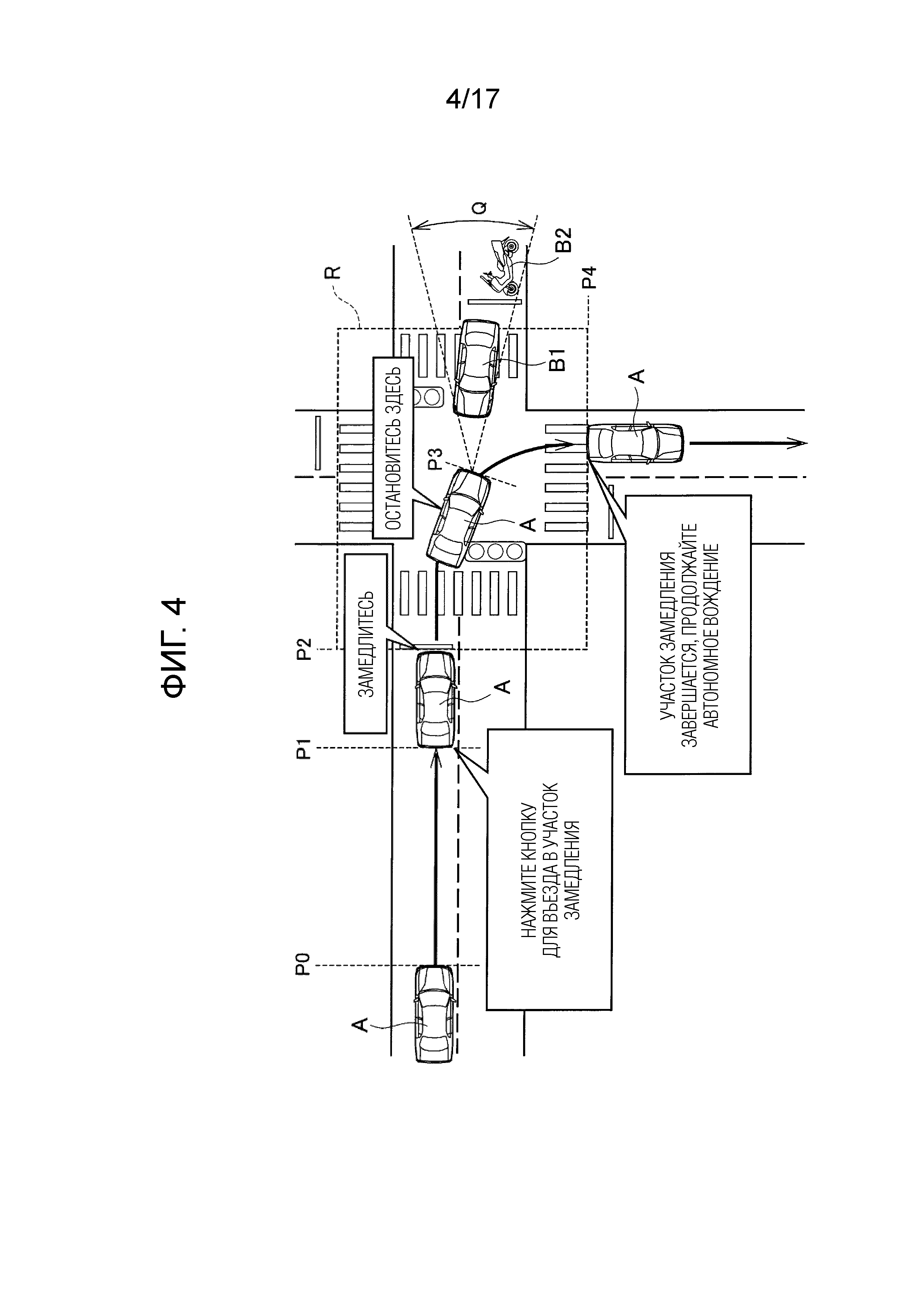
Фиг. 4 является видом для описания примера работы устройства управления автономным транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 5 является видом для описания примера работы устройства управления автономным транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 6 является видом для описания примера работы устройства управления автономным транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 7 является видом для описания примера работы устройства управления автономным транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 8 является видом для описания примера работы устройства управления автономным транспортным средством согласно первому варианту осуществления настоящего изобретения.
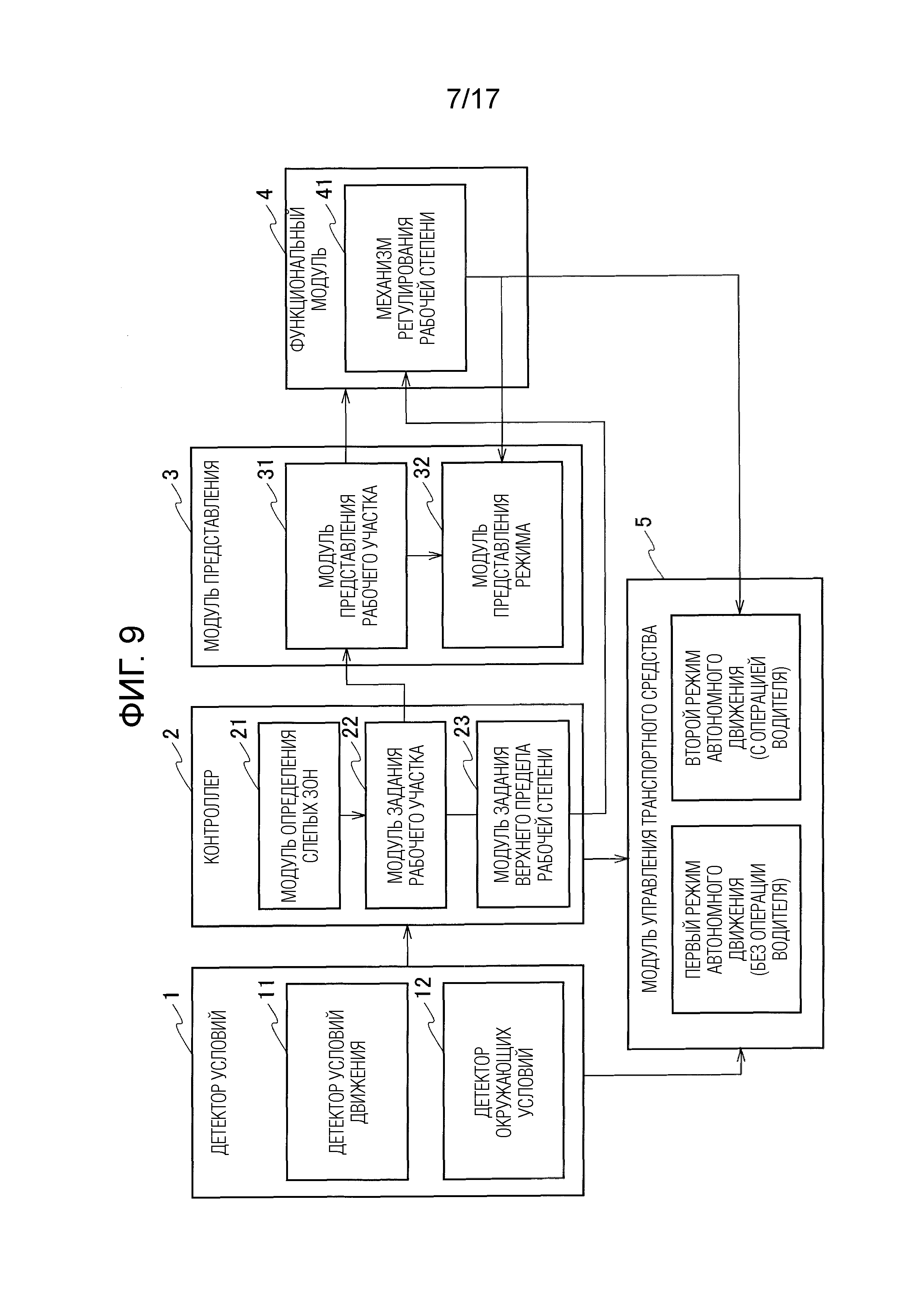
Фиг. 9 является блок-схемой, описывающей конфигурацию устройства управления автономным транспортным средством согласно второму варианту осуществления настоящего изобретения.
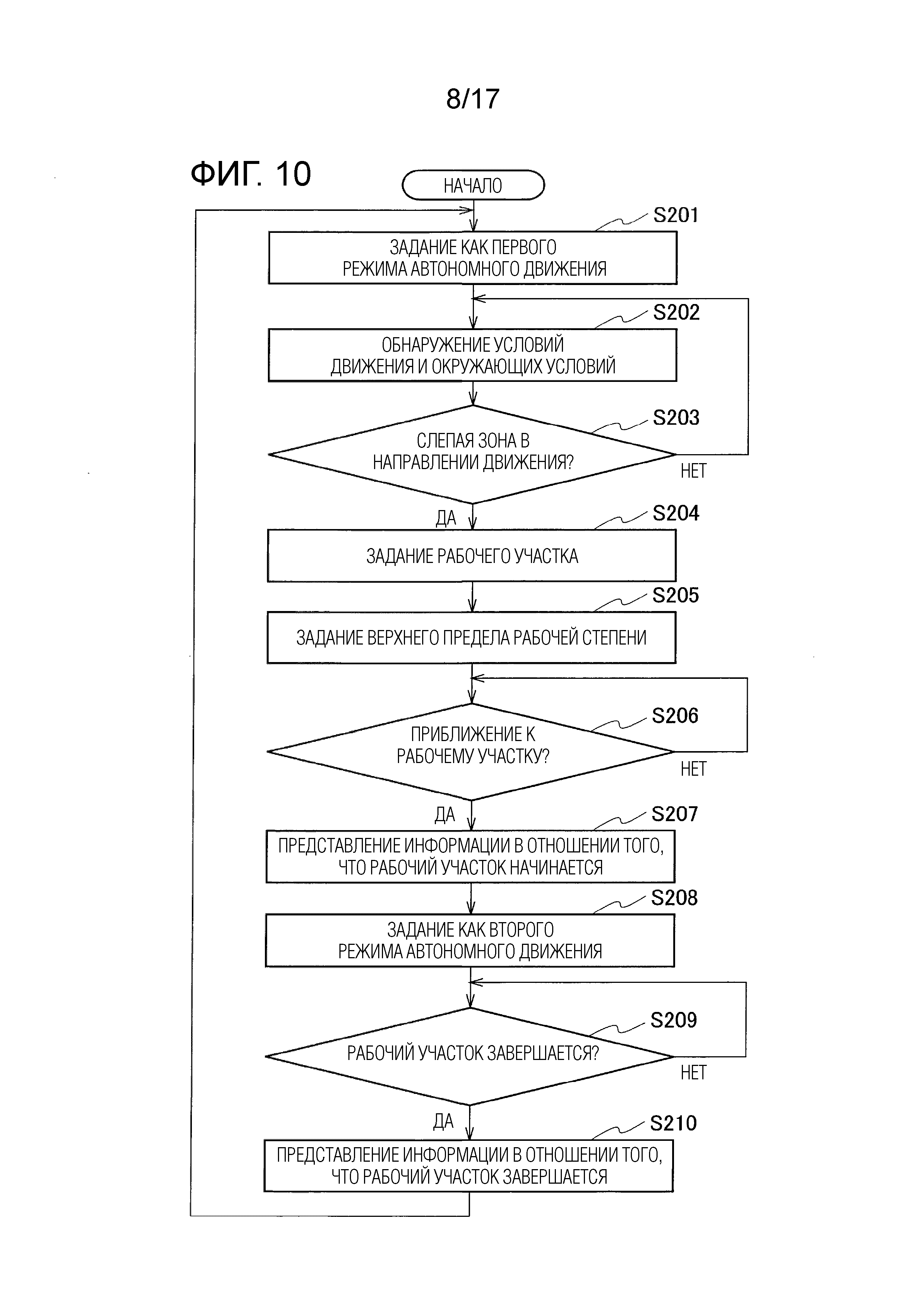
Фиг. 10 является блок-схемой последовательности операций способа для описания способа управления автономным транспортным средством с использованием устройства управления автономным транспортным средством согласно второму варианту осуществления настоящего изобретения.
Фиг. 11 является видом для описания примера работы устройства управления автономным транспортным средством согласно второму варианту осуществления настоящего изобретения.
Фиг. 12 является блок-схемой, описывающей конфигурацию устройства управления автономным транспортным средством согласно третьему варианту осуществления настоящего изобретения.
Фиг. 13 является видом, иллюстрирующим модуль уведомления относительно ограничения скорости в устройстве управления автономным транспортным средством согласно третьему варианту осуществления настоящего изобретения.
Фиг. 14 является блок-схемой последовательности операций способа для описания способа управления автономным транспортным средством с использованием устройства управления автономным транспортным средством согласно третьему варианту осуществления настоящего изобретения.
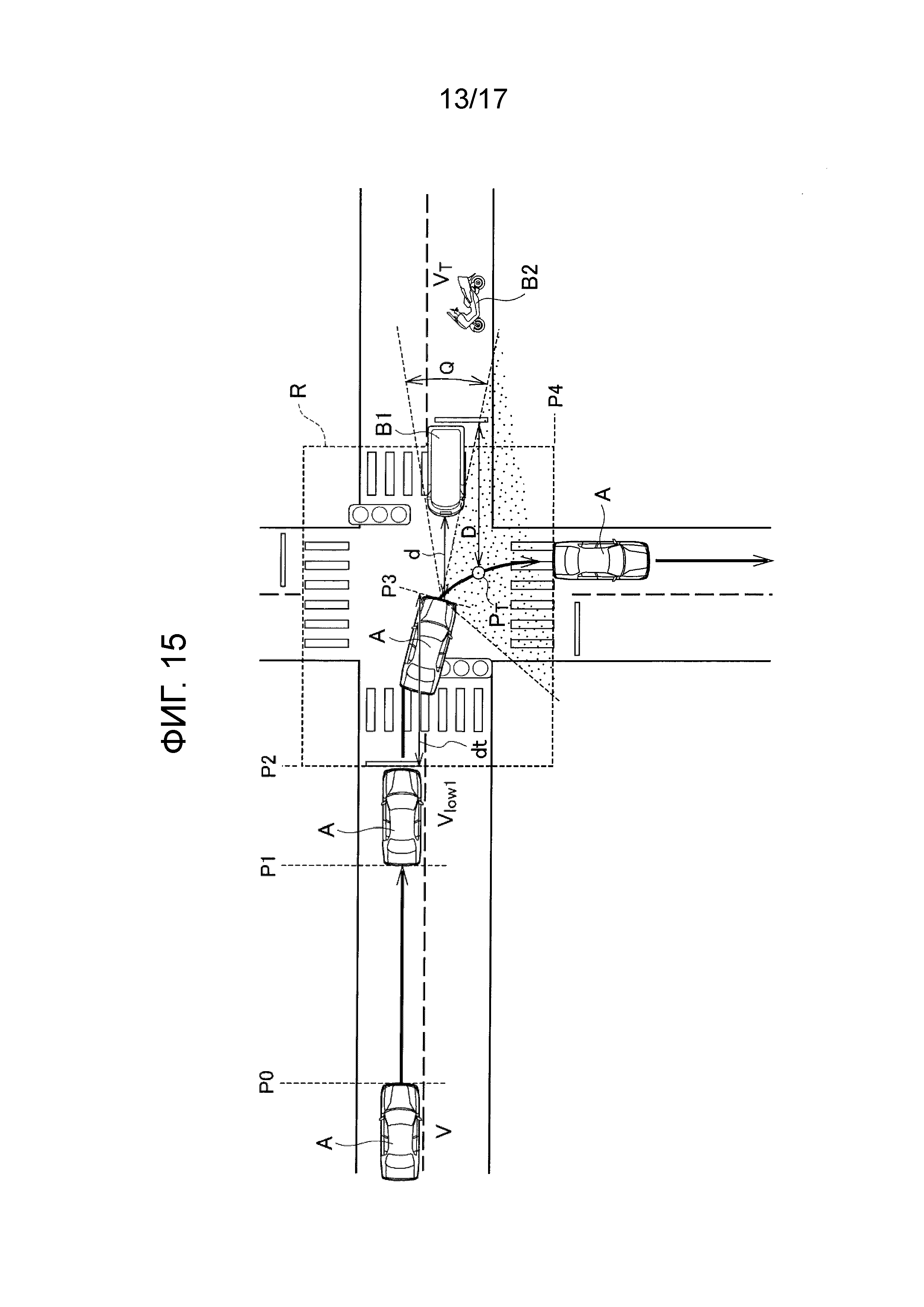
Фиг. 15 является видом для описания примера работы устройства управления автономным транспортным средством согласно третьему варианту осуществления настоящего изобретения.
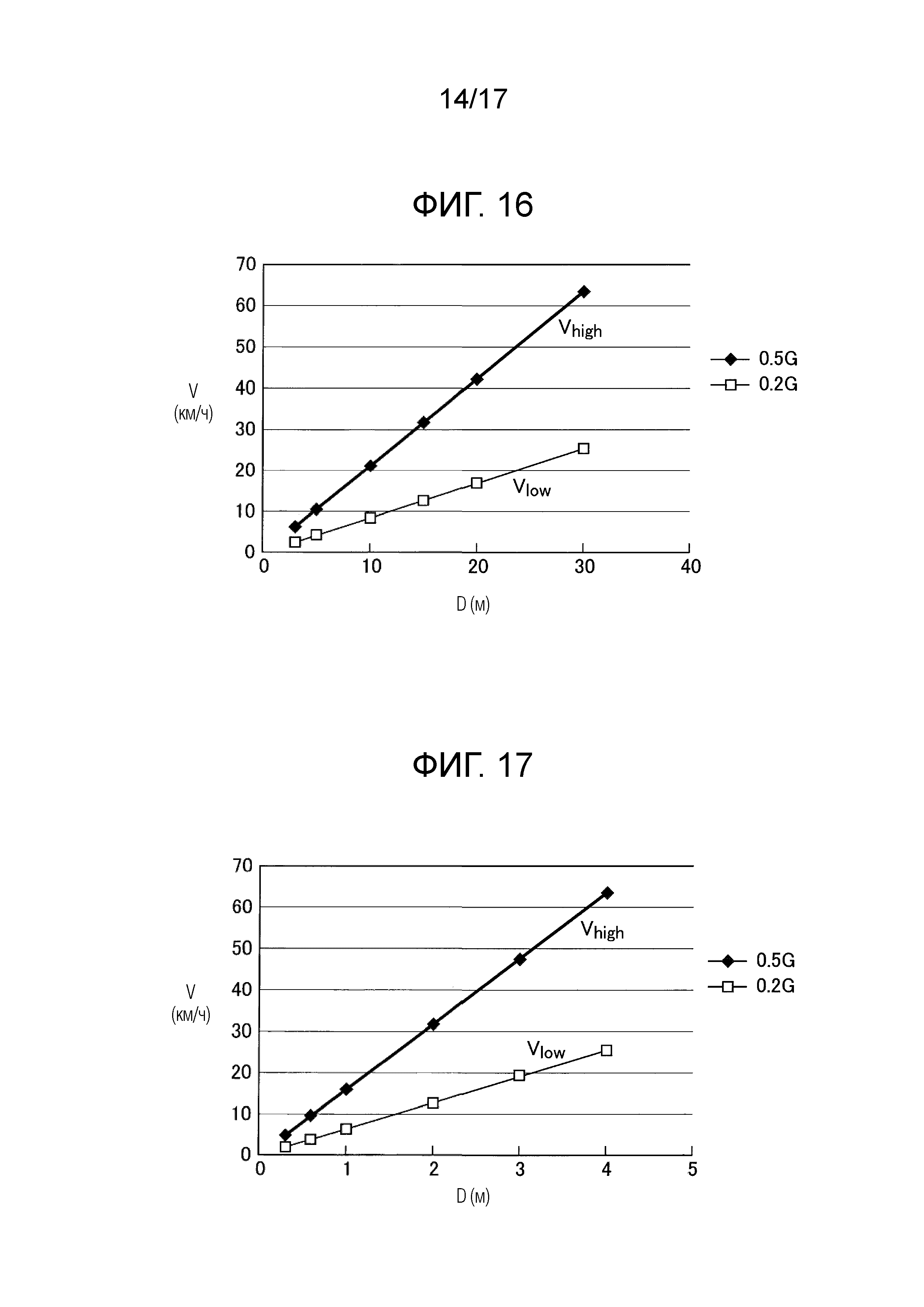
Фиг. 16 является графиком, иллюстрирующим ограничение скорости, вычисленное посредством устройства управления автономным транспортным средством согласно третьему варианту осуществления настоящего изобретения.
Фиг. 17 является графиком, иллюстрирующим ограничение скорости, вычисленное посредством устройства управления автономным транспортным средством согласно третьему варианту осуществления настоящего изобретения.
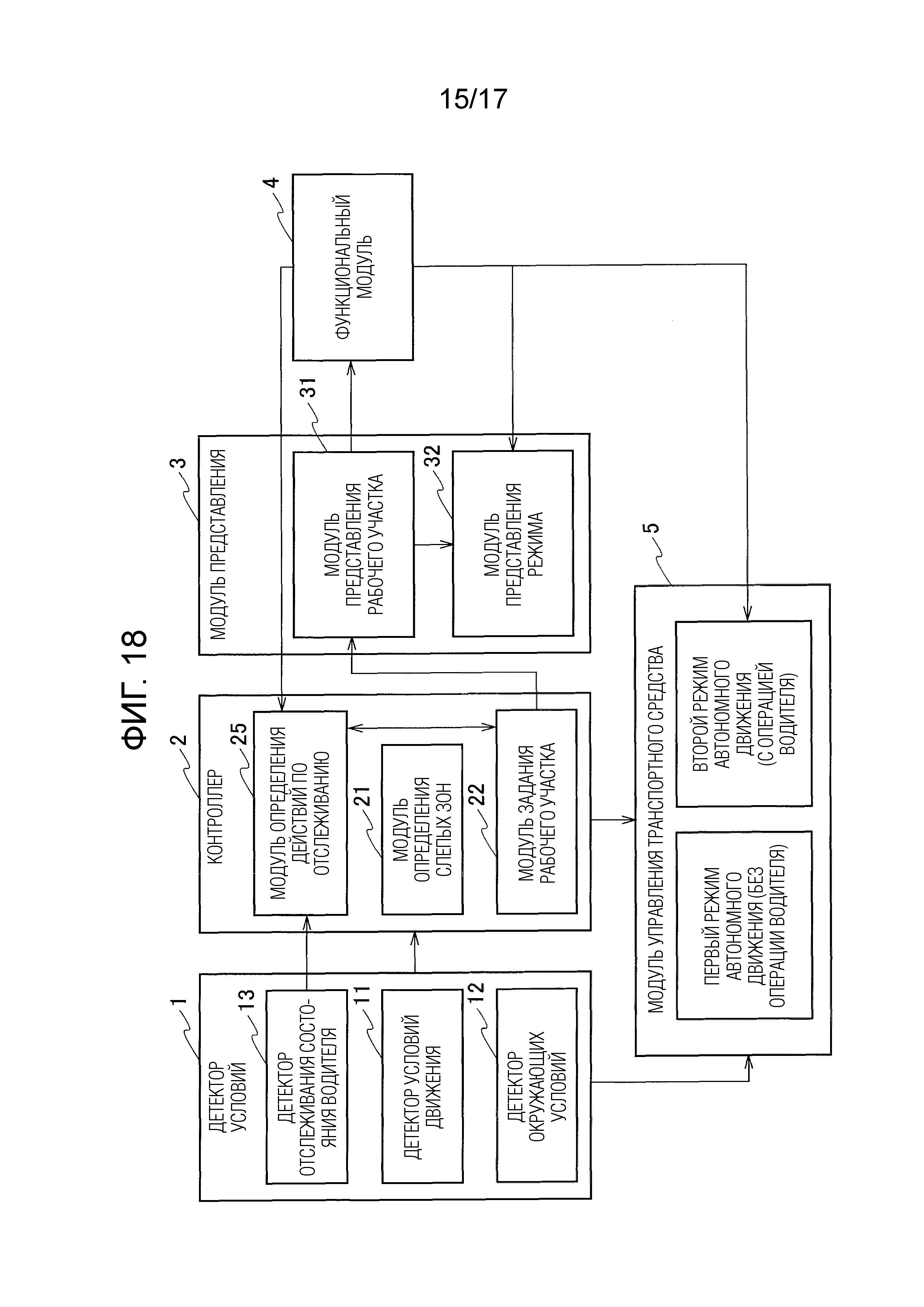
Фиг. 18 является блок-схемой, описывающей конфигурацию устройства управления автономным транспортным средством согласно четвертому варианту осуществления настоящего изобретения.
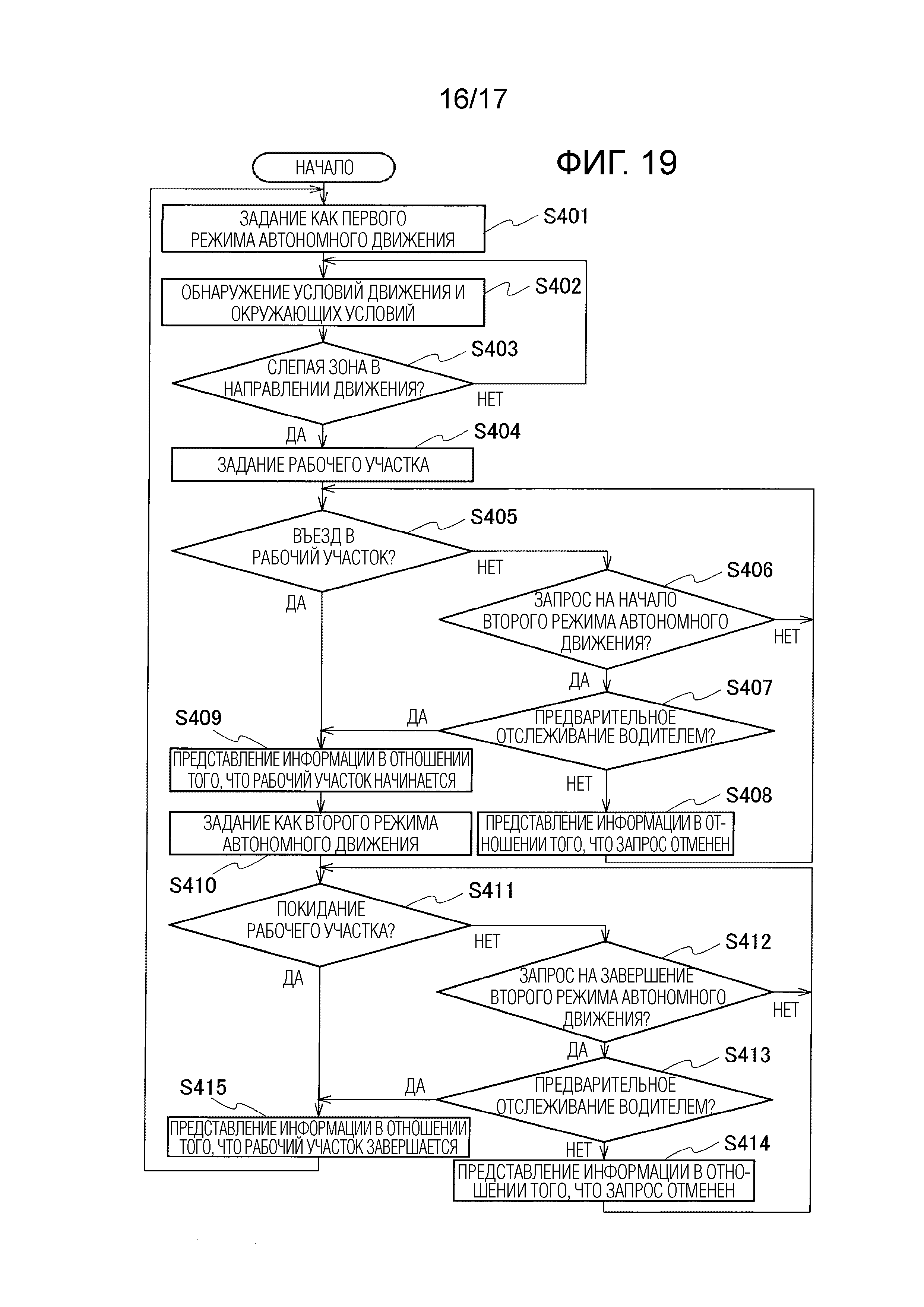
Фиг. 19 является блок-схемой последовательности операций способа для описания способа управления автономным транспортным средством с использованием устройства управления автономным транспортным средством согласно четвертому варианту осуществления настоящего изобретения.
Фиг. 20 является видом для описания примера работы устройства управления автономным транспортным средством согласно четвертому варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Ниже описываются первый-четвертый варианты осуществления настоящего изобретения со ссылкой на чертежи. Идентичные или аналогичные элементы в описаниях чертежей обозначены посредством идентичных или аналогичных ссылок с номерами, и перекрывающиеся пояснения не повторяются ниже.
[0010] Первый вариант осуществления
Устройство управления автономным транспортным средством согласно первому варианту осуществления настоящего изобретения включает в себя детектор 1 условий, контроллер 2, модуль 3 представления, функциональный модуль 4 и модуль 5 управления транспортного средства, как показано на фиг. 1. Устройство управления автономным транспортным средством согласно первому варианту осуществления устанавливается в автономном транспортном средстве A (следует обратиться к фиг. 4), имеющем первый режим автономного движения для движения без операции водителя и второй режим автономного движения для движения в соответствии с операцией водителя.
[0011] Детектор 1 условий включает в себя детектор 11 условий движения, который обнаруживает условия движения автономного транспортного средства A, и детектор 12 окружающих условий, который обнаруживает окружающие условия автономного транспортного средства A.
[0012] Детектор 11 условий движения включает в себя датчики, соединенные с шиной контроллерной сети (CAN), чтобы обнаруживать состояния движения автономного транспортного средства A, такие как датчик скорости, датчик ускорения, датчик угловой скорости и датчик угла поворота при рулении, и модуль для обнаружения текущей позиции автономного транспортного средства A, такой как приемное устройство на основе глобальной системы позиционирования (GPS), установленное в навигационной системе транспортного средства.
[0013] Детектор 11 условий движения, например, определяет скорость автономного транспортного средства A, количество движения, к примеру, ускорение и угловую скорость трех осей в трехмерной ортогональной системе координат, и позицию движения автономного транспортного средства A в картографической информации в качестве состояний движения. Позиция движения вычисляется согласно текущей позиции и количеству движения автономного транспортного средства A. Детектор 11 условий движения вычисляет позицию автономного транспортного средства A относительно объектов на земле, записанную в картографическую информацию, согласно объектам на земле, обнаруженным посредством детектора 12 окружающих условий, с тем чтобы получать конкретную позицию движения автономного транспортного средства A в картографической информации.
[0014] Детектор 12 окружающих условий включает в себя датчик для обнаружения окружающих условий автономного транспортного средства A, такой как камера, лазерный дальномер (LRF), ультразвуковой датчик, датчик миллиметрового диапазона и инфракрасный датчик. Детектор 12 окружающих условий обнаруживает окружающие условия, включающие в себя число, позицию и скорость участников дорожного движения, таких как другие транспортные средства или пешеходы около автономного транспортного средства A.
[0015] Детектор 12 окружающих условий также обнаруживает позиции различных видов объектов на земле, таких как граничные линии полос движения, светофоры и дорожные знаки, в дополнение к участникам дорожного движения. Детектор 12 окружающих условий может обнаруживать состояния световых сигналов светофоров через обработку изображений. Детектор 12 окружающих условий может обнаруживать окружающие условия автономного транспортного средства A посредством внешней связи. Окружающие условия, обнаруженные посредством детектора 12 окружающих условий, дополнительно включают в себя информацию дорожного движения, такую как затор в движении и ограничения движения и погодная информация.
[0016] Контроллер 2 включает в себя модуль 21 определения слепых зон, который определяет присутствие или отсутствие слепых зон, вызываемых посредством помех около автономного транспортного средства A, и модуль 22 задания рабочего участка, который задает рабочий участок R (следует обратиться к фиг. 4), в котором автономное транспортное средство A движется во втором режиме автономного движения.
[0017] Модуль 21 определения слепых зон определяет присутствие или отсутствие слепых зон, вызываемых посредством помех в направлении движения автономного транспортного средства A, согласно условиям движения, обнаруженным посредством детектора 11 условий движения, и окружающим условиям, обнаруженным посредством детектора 12 окружающих условий. Когда имеется слепая зона в направлении движения автономного транспортного средства A, модуль 21 определения слепых зон определяет расстояние от автономного транспортного средства A до слепой зоны и размер (угол) слепой зоны. Примеры помех, вызывающих слепые зоны, включают в себя другие транспортные средства, конструкции вдоль дорог, кривые или уклоны на дорогах, дождь и снег.
[0018] Модуль 22 задания рабочего участка задает рабочий участок R согласно условиям движения, обнаруженным посредством детектора 11 условий движения, и окружающим условиям, обнаруженным посредством детектора 12 окружающих условий. Когда модуль 21 определения слепых зон определяет то, что имеется слепая зона, модуль 22 задания рабочего участка задает рабочий участок R на основе слепой зоны. Рабочий участок R представляет собой область, в которой автономное транспортное средство A должно ехать на уменьшенной скорости или останавливаться, с тем чтобы проверять безопасность относительно других участников дорожного движения, которые могут появляться из обнаруженной слепой зоны.
[0019] Модуль 3 представления включает в себя модуль 31 представления рабочего участка, который представляет информацию относительно временного интервала переключения между первым режимом автономного движения и вторым режимом автономного движения водителю в автономном транспортном средстве A, и модуль 32 представления режима, который представляет текущий режим автономного движения водителю в автономном транспортном средстве A. Модуль 3 представления включает в себя, по меньшей мере, или дисплей, который отображает изображения или символы, к примеру, жидкокристаллический дисплей и дисплей на лобовом стекле (HUD), либо динамик, который воспроизводит голоса.
[0020] Модуль 31 представления рабочего участка предоставляет водителю информацию относительно времени, когда автономное транспортное средство A достигает начальной точки или конечной точки рабочего участка R, с тем чтобы представлять временной интервал переключения между режимами автономного движения водителю. Временной интервал, представленный водителю, может быть временным интервалом предварительного информирования водителя в отношении того, когда переключаться между режимами автономного движения. В частности, модуль 31 представления рабочего участка может представлять предварительное уведомление в отношении того, когда переключаться между режимами автономного движения водителю в точке, в которой расстояние от автономного транспортного средства A до каждой из начальной точки и конечной точки рабочего участка R достигает предварительно определенного порогового значения. Начальная точка рабочего участка R представляет собой точку, в которой автономное транспортное средство A въезжает в рабочий участок R, и конечная точка представляет собой точку, в которой автономное транспортное средство A покидает рабочий участок R.
[0021] Модуль 32 представления режима информирует водителя относительно того, что текущий режим автономного движения представляет собой первый режим автономного движения, когда автономное транспортное средство A не движется в рабочем участке R. Модуль 32 представления режима информирует водителя относительно того, что текущий режим автономного движения представляет собой второй режим автономного движения, когда автономное транспортное средство A движется в рабочем участке R.
[0022] Функциональный модуль 4 обнаруживает действие операции, выполняемой на функциональном модуле 4 водителя в автономном транспортном средстве A, и выводит выходной сигнал, соответствующий операции, в модуль 5 управления транспортного средства. Функциональный модуль 4 обнаруживает, по меньшей мере, присутствие или отсутствие операции водителя. Функциональный модуль 4 может представлять собой устройство ввода, которое обнаруживает присутствие или отсутствие операции в зависимости от смещения функционального модуля 4, вызываемого посредством силы, прикладываемой водителем. Функциональный модуль 4 может представлять собой кнопочное устройство ввода, как показано на фиг. 2.
[0023] Альтернативно, функциональный модуль 4 может представлять собой педаль, рычажное устройство ввода, устройство ввода, предоставленное на руле, и т.п. Использование части модуля, традиционно включенного в транспортное средство, в качестве функционального модуля 4 упрощает общую конфигурацию и обеспечивает возможность водителю управлять функциональным модулем 4 способом, аналогичным традиционному модулю, с тем чтобы повышать удобство использования.
[0024] Модуль 5 управления транспортного средства управляет приводной системой и системой рулевого управления согласно условиям движения и окружающим условиям, с тем, чтобы управлять автономным транспортным средством A таким образом, что оно автономно движется, например, по маршруту движения, предварительно определенному посредством контроллера 2. Модуль 5 управления транспортного средства управляет автономным транспортным средством A во втором режиме автономного движения таким образом, что оно движется в соответствии с операцией на функциональном модуле 4 водителя, когда автономное транспортное средство A расположено в рабочем участке R.
[0025] Модуль 5 управления транспортного средства управляет автономным транспортным средством A в первом режиме автономного движения таким образом, что оно движется без операции водителя согласно условиям движения и окружающим условиям. Модуль 5 управления транспортного средства управляет автономным транспортным средством A во втором режиме автономного движения таким образом, что оно движется на уменьшенной скорости, когда функциональный модуль 4 обнаруживает операцию водителя, или останавливается, когда отсутствие операции обнаруживается согласно условиям движения и окружающим условиям.
[0026] Модуль 5 управления транспортного средства устройства управления автономным транспортным средством согласно первому варианту осуществления управляет автономным транспортным средством A во втором режиме автономного движения только таким образом, что оно движется на уменьшенной скорости или останавливается в соответствии с операцией водителя. Система рулевого управления и скорость управляются посредством модуля 5 управления транспортного средства согласно условиям движения и окружающим условиям или в зависимости от обнаруженной слепой зоны. Модуль 5 управления транспортного средства в силу этого управляет автономным транспортным средством A таким образом, что оно движется полуавтономно во втором режиме автономного движения, с помощью упрощенной операции.
[0027] Способ управления автономным транспортным средством
Способ управления автономным транспортным средством с использованием устройства управления автономным транспортным средством согласно первому варианту осуществления проиллюстрирован со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 3.
[0028] На этапе S101, модуль 5 управления транспортного средства задает начальный режим автономного движения как первый режим автономного движения. Модуль 5 управления транспортного средства управляет автономным транспортным средством A в первом режиме автономного движения таким образом, что оно движется без операции водителя согласно условиям движения и окружающим условиям, которые должны обнаруживаться.
[0029] На этапе S102, детектор 11 условий движения обнаруживает условия движения автономного транспортного средства A, и детектор 12 окружающих условий обнаруживает окружающие условия автономного транспортного средства A.
[0030] На этапе S103, модуль 21 определения слепых зон определяет присутствие или отсутствие слепой зоны, вызываемой посредством помехи на дороге, в пределах предварительно определенного расстояния в направлении движения автономного транспортного средства A согласно условиям движения и окружающим условиям, обнаруженным на этапе S102. Модуль 21 определения слепых зон определяет расстояние от автономного транспортного средства A до слепой зоны и размер слепой зоны. Процесс переходит к этапу S104, когда слепая зона обнаруживается, или возвращается к этапу S102, когда слепая зона не обнаруживается.
[0031] На этапе S104, модуль 22 задания рабочего участка задает рабочий участок R в направлении движения автономного транспортного средства A согласно условиям движения и окружающим условиям и слепой зоне, обнаруженной на этапе S103.
[0032] На этапе S105, контроллер 2 определяет то, приближается или нет автономное транспортное средство A к рабочему участку R. Контроллер 2 определяет то, что автономное транспортное средство A приближается к рабочему участку R, когда расстояние от автономного транспортного средства A до начальной точки рабочего участка R составляет предварительно определенное пороговое значение или меньше согласно условиям движения и окружающим условиям. Процесс переходит к этапу S106, когда автономное транспортное средство A приближается к рабочему участку R, или повторяет этап S105, когда автономное транспортное средство A еще не приближается к рабочему участку R.
[0033] На этапе S106, модуль 31 представления рабочего участка представляет информацию, уведомляющую или предварительно уведомляющую водителя относительно того, что рабочий участок R, а именно, второй режим автономного движения начинается.
[0034] На этапе S107, модуль 5 управления транспортного средства переключается из первого режима автономного движения на второй режим автономного движения, когда автономное транспортное средство A въезжает в рабочий участок R. Модуль 5 управления транспортного средства управляет автономным транспортным средством A во втором режиме автономного движения таким образом, что оно движется в соответствии с операцией на функциональном модуле 4 водителя согласно условиям движения и окружающим условиям.
[0035] На этапе S108 контроллер 2 определяет то, достигает или нет автономное транспортное средство A конечной точки рабочего участка R. Процесс переходит к этапу S109, когда определяется то, что автономное транспортное средство A достигает конечной точки, или повторяет этап S108, когда автономное транспортное средство A еще не достигает конечной точки.
[0036] На этапе S109, модуль 31 представления рабочего участка представляет информацию, уведомляющую водителя относительно того, что рабочий участок R завершается, и процесс возвращается к этапу S101.
[0037] Пример работы
Фиг. 4 иллюстрирует пример работы устройства управления автономным транспортным средством согласно первому варианту осуществления в случае, если автономное транспортное средство A поворачивает направо на перекрестке.
[0038] Когда автономное транспортное средство A проезжает через точку P0, модуль 5 управления транспортного средства управляет автономным транспортным средством A в первом режиме автономного движения таким образом, что оно движется без операции водителя согласно условиям движения и окружающим условиям.
[0039] Когда автономное транспортное средство A достигает точки P1, модуль 21 определения слепых зон обнаруживает транспортное средство B1 в качестве участника дорожного движения, ожидающего поворота направо на перекрестке в направлении движения автономного транспортного средства A, и обнаруживает слепую зону Q, возникающую за счет транспортного средства B1. Модуль 22 задания рабочего участка задает рабочий участок R, поскольку слепая зона Q обнаруживается. Рабочий участок R представляет собой область, включающую в себя перекресток и соответствующие пешеходные переходы, и например, задается таким образом, что стоп-линия в полосе движения, в которой движется автономное транспортное средство A, задается в качестве начальной точки рабочего участка R.
[0040] Модуль 31 представления рабочего участка воспроизводит голос "Нажмите кнопку для въезда в участок замедления", например, с тем, чтобы представлять информацию, предварительно уведомляющую водителя относительно того, что текущий режим автономного движения должен переключаться на второй режим автономного движения. Водитель начинает управление функциональным модулем 4 в соответствии с представленной информацией.
[0041] Когда автономное транспортное средство A достигает точки P2 (начальной точки рабочего участка R), модуль 31 представления рабочего участка воспроизводит голос "Замедлитесь", например, с тем чтобы представлять информацию, уведомляющую водителя относительно того, что текущий режим автономного движения переключается на второй режим автономного движения.
[0042] Когда автономное транспортное средство A начинает поворот направо и достигает точки P3, водитель прекращает управление функциональным модулем 4, чтобы проверять то, что отсутствует риск столкновения с другим транспортным средством B2, которое может появляться из слепой зоны, вызываемой посредством транспортного средства B1. Автономное транспортное средство A затем останавливается в точке P3. Модуль 3 представления может информировать водителя относительно того, что операция прерывается, например, посредством воспроизведения голоса "Остановитесь здесь". Водитель после проверки безопасности в точке P3 повторно начинает управление функциональным модулем 4. Автономное транспортное средство A в силу этого повторно начинает поворот направо.
[0043] Когда автономное транспортное средство A достигает точки P4 (конечной точки рабочего участка R), модуль 31 представления рабочего участка воспроизводит голос "Участок замедления завершается, продолжайте автономное вождение", например, с тем чтобы представлять информацию, уведомляющую водителя относительно того, что текущий режим автономного движения переключается на первый режим автономного движения. Водитель прекращает управление функциональным модулем 4 в соответствии с представленной информацией.
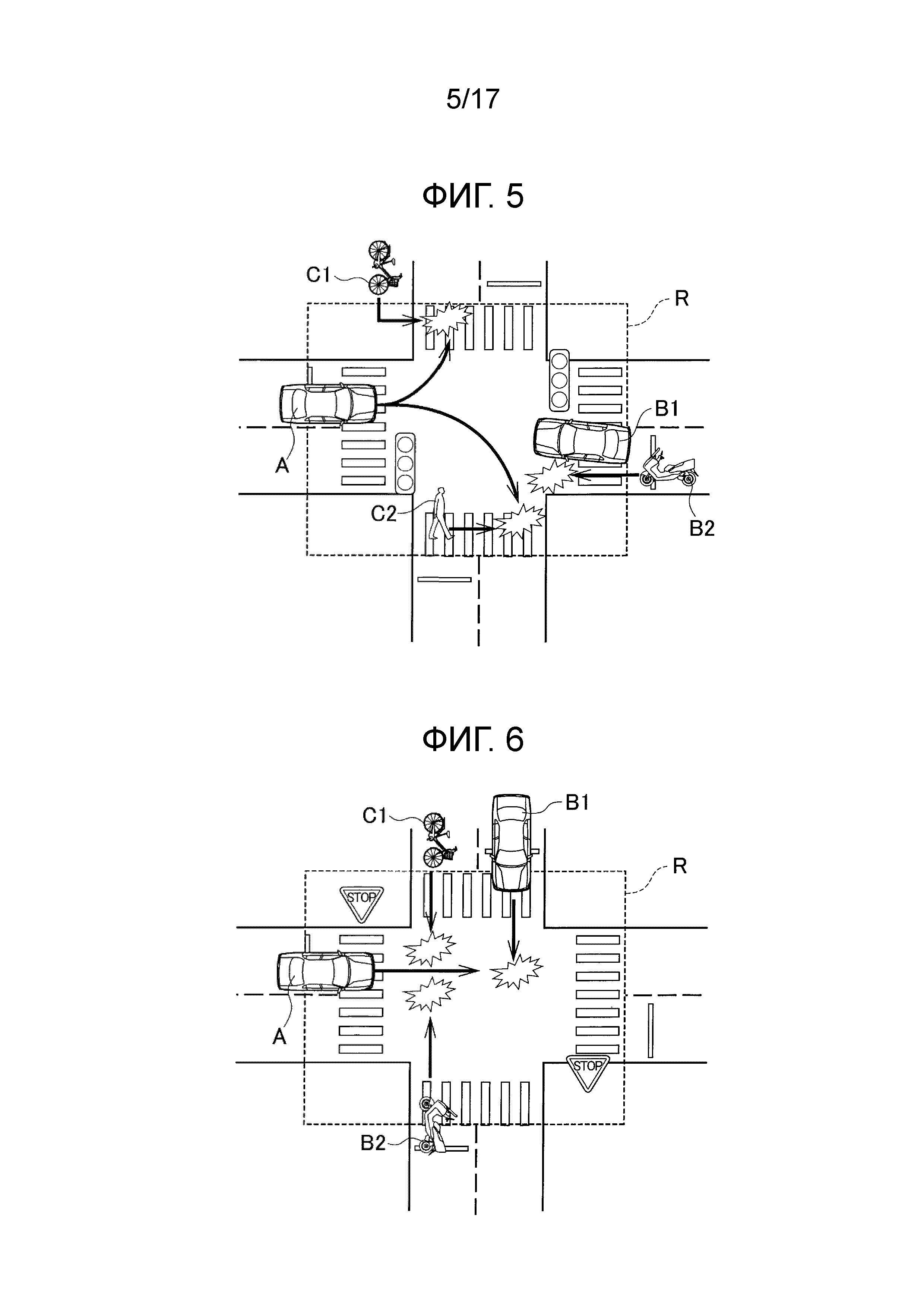
[0044] Альтернативно, модуль 22 задания рабочего участка может задавать рабочий участок R независимо от присутствия или отсутствия слепой зоны таким образом, чтобы переключать текущий режим автономного движения на второй режим автономного движения. Например, как показано на фиг. 5, модуль 22 задания рабочего участка задает рабочий участок R, когда число целей, которые должны проверяться около автономного транспортного средства A, составляет предварительно определенное пороговое значение или больше. Фиг. 5 иллюстрирует случай, в котором три участника дорожного движения из транспортного средства B2, которое может присутствовать в слепой зоне, вызываемой посредством транспортного средства B1, велосипеда C1, который может проезжать через левый пешеходный переход, и пешехода C2, который может проходить через правый пешеходный переход, представляют собой цели, для которых водитель должен проверять безопасность. Альтернативно, модуль 22 задания рабочего участка может просто задавать рабочий участок R, когда автономное транспортное средство A поворачивает любым способом на перекрестке.
[0045] Как показано на фиг. 6, модуль 22 задания рабочего участка может задавать модуль 22 задания рабочего участка на перекрестке в случае, если автономное транспортное средство A движется на второстепенной дороге и проезжает через перекресток.
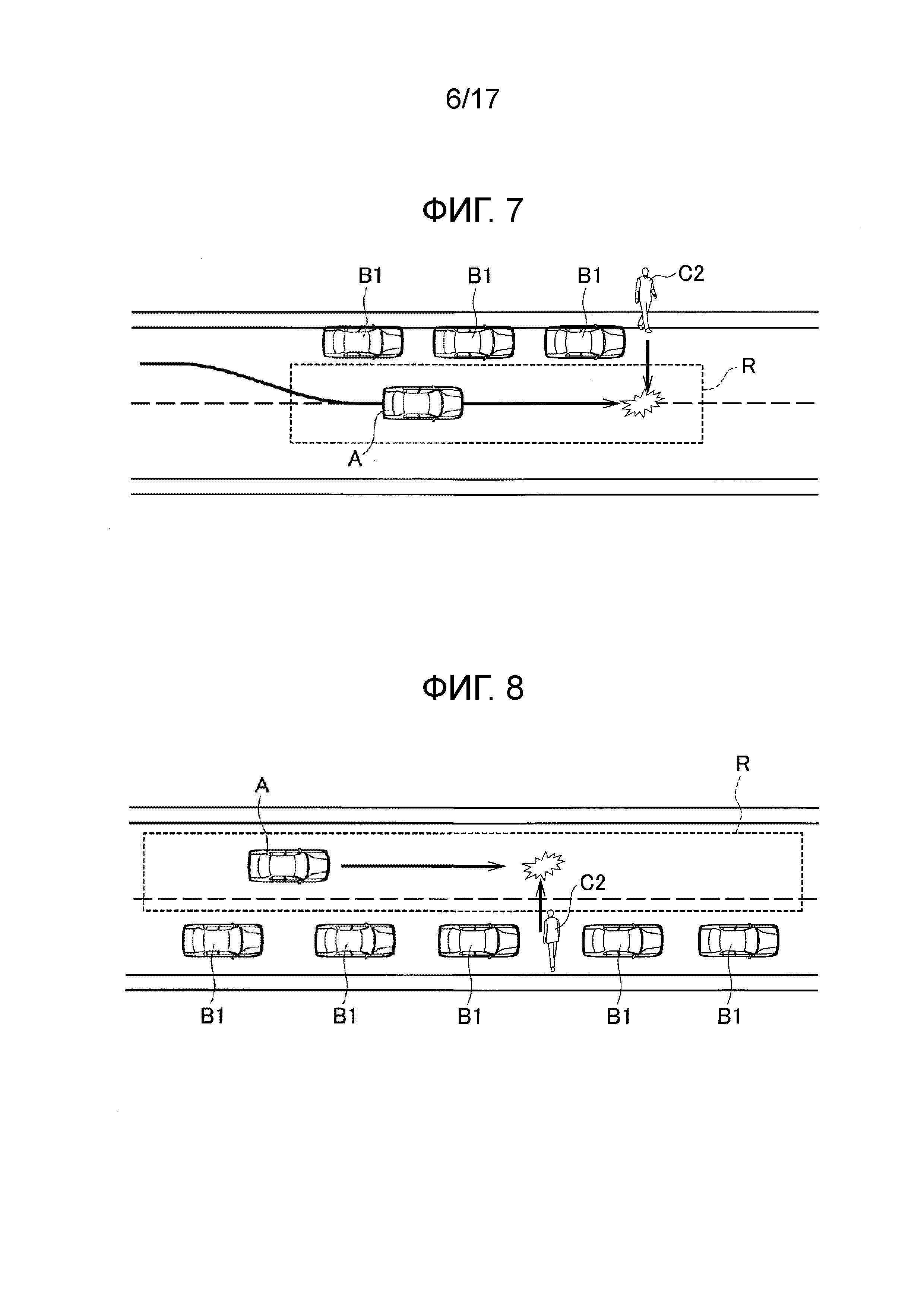
[0046] Как показано на фиг. 7, модуль 22 задания рабочего участка может задавать модуль 22 задания рабочего участка параллельно с множеством транспортных средств B1, совмещенных на стороны дороги, в случае если автономное транспортное средство A проезжает через совмещенные транспортные средства B1.
[0047] Как показано на фиг. 8, модуль 22 задания рабочего участка может задавать модуль 22 задания рабочего участка параллельно с множеством транспортных средств B1 в полосе движения с затором в случае, если автономное транспортное средство A движется в полосе движения рядом с полосой движения с затором.
[0048] Как описано выше, согласно устройству управления автономным транспортным средством первого варианта осуществления, модуль 22 задания рабочего участка задает рабочий участок R, в котором автономное транспортное средство A движется во втором режиме автономного движения и должно замедляться или останавливаться, с тем чтобы проверять безопасность относительно других участников дорожного движения, которые могут появляться в направлении движения автономного транспортного средства A. Поскольку автономное транспортное средство A может двигаться в то время, когда первый режим автономного движения и второй режим автономного движения автономно переключаются в зависимости от обстановки, безопасность автономного транспортного средства может повышаться.
[0049] Согласно устройству управления автономным транспортным средством первого варианта осуществления, модуль 5 управления транспортного средства управляет автономным транспортным средством A таким образом, что оно движется, когда функциональный модуль 4 управляется, и останавливается, когда функциональный модуль 4 не управляется во втором режиме автономного движения. Упрощенная работа повышает удобство использования, и водитель в силу этого может проверять безопасность около автономного транспортного средства A. Помимо этого, автономное транспортное средство A может останавливаться сразу в надлежащий момент времени.
[0050] Устройство управления автономным транспортным средством согласно первому варианту осуществления задает рабочий участок R на основе слепых зон, вызываемых посредством помех около автономного транспортного средства A. Автономное транспортное средство A в силу этого может двигаться в соответствии с операцией водителя, в то время как водитель проверяет безопасность окружения в точке, в которой могут внезапно появляться другие участники дорожного движения.
[0051] Модуль 22 задания рабочего участка также может задавать рабочий участок R на основе слепой зоны в случае, если имеется сложная точка в слепой зоне, в которую могут въезжать другие участники дорожного движения, в пределах предварительно определенного расстояния на дороге в направлении движения автономного транспортного средства A. Примеры сложных точек включают в себя перекресток и точку слияния. Устройство управления автономным транспортным средством согласно первому варианту осуществления задает рабочий участок R в точке с большей степенью важности таким образом, чтобы повышать безопасность автономного транспортного средства A.
[0052] Устройство управления автономным транспортным средством согласно первому варианту осуществления задает рабочий участок R около целей, которые должны проверяться, когда число целей составляет предварительно определенное пороговое значение или больше, с тем чтобы двигаться во втором режиме автономного движения в точке, в которой вероятность того, что автономное транспортное средство A может сталкиваться с другими участниками дорожного движения, является относительно высокой. Соответственно, точность в предотвращении столкновения с другими участниками дорожного движения может повышаться, с тем чтобы повышать безопасность автономного транспортного средства A.
[0053] Детектор 12 окружающих условий может обнаруживать цели, которые должны проверяться, посредством типа. Тип целей, которые должны проверяться, определяется, например, в зависимости от размера (высоты, ширины и т.п.), скорости и позиции целей. Дети, велосипеды и пожилые люди рассматриваются в качестве указанных целей, которые должны проверяться, действия которых трудно ожидать. Когда имеется предварительно указанная цель, которая должна проверяться, около автономного транспортного средства A, модуль 22 задания рабочего участка может задавать рабочий участок R на основе указанной цели.
[0054] Модуль 22 задания рабочего участка также может задавать рабочий участок R на маршруте, на котором движется автономное транспортное средство A, в течение периода, в который обнаружение окружающих условий посредством детектора 12 окружающих условий является затруднительным вследствие ненастной погоды, помех и т.п. Примеры таких ситуаций, в которых обнаружение окружающих условий является затруднительным, включают в себя случай ненастной погоды, такой как дождь, снегопад и снежный покров, случай, в котором датчики блокируются посредством объектов, и случай, в котором регулярная связь с внешней стороной не доступна. Соответственно, безопасность автономного транспортного средства A может повышаться, поскольку автономное транспортное средство A может поддерживать автономное движение таким образом, что первый режим автономного движения переключается на второй режим автономного движения, когда затруднительно безопасно двигаться в первом режиме автономного движения.
[0055] Во втором режиме автономного движения, модуль 5 управления транспортного средства может автономно останавливать автономное транспортное средство A независимо от операции на функциональном модуле 4 водителя, когда детектор 12 окружающих условий обнаруживает цель, приближающуюся к автономному транспортному средству A, в пределах предварительно определенного расстояния. Модуль 5 управления транспортного средства может справляться с приближением цели, которую водитель не может заметить, с тем чтобы повышать уровень безопасности автономного транспортного средства A.
[0056] Во втором режиме автономного движения, модуль 3 представления может функционировать в качестве модуля уведомления для уведомления водителя относительно того, что модуль 5 управления транспортного средства автономно останавливает автономное транспортное средство A во втором режиме автономного движения, когда детектор 12 окружающих условий обнаруживает цель, приближающуюся к автономному транспортному средству A. Водитель в силу этого может распознавать то, что автономное транспортное средство A управляется регулярно, когда автономное транспортное средство A останавливается независимо от операции на функциональном модуле 4, и то, что может быть приближающаяся цель, которую водитель не может заметить вследствие функционирования модуля 3 представления в качестве модуля уведомления.
[0057] Модуль 3 представления может уведомлять водителя в отношении нежелательных условий в ходе второго режима автономного движения. Пример нежелательных условий является случаем, в котором автономное транспортное средство A остается остановленным на перекрестке, хотя детектор 12 окружающих условий не обнаруживает цели, приближающейся к автономному транспортному средству A, поскольку непрерывная остановка может затруднять плавный трафик. Другой пример является случаем, в котором водитель управляет функциональным модулем 4, чтобы останавливать автономное транспортное средство A в ненадлежащей позиции, к примеру, на пешеходном переходе, в противоположной полосе движения и в пересекающейся полосе движения. Модуль 3 представления, служащий в качестве модуля уведомления, может уведомлять водителя относительно такой ненадлежащей остановки, и вынуждать водителя управлять функциональным модулем 4, чтобы повторно начинать движение.
[0058] Когда функциональный модуль 4 представляет собой устройство ввода, которое обнаруживает присутствие или отсутствие операции в зависимости от смещения, вызываемого посредством силы, прикладываемой водителем, функциональный модуль 4 может включать в себя актуатор, который смещает управляемую часть в противоположном направлении относительно силы, прикладываемой водителем, когда модуль 5 управления транспортного средства автономно останавливает автономное транспортное средство A. Эта конфигурация может уведомлять водителя относительно того, что автономное транспортное средство A управляется регулярно, когда автономное транспортное средство A останавливается независимо от операции на функциональном модуле 4, и относительно того, что может быть приближающаяся цель, не распознанная водителем.
[0059] Когда отсутствует приближающаяся цель, и автономное транспортное средство A в силу этого может повторно начинать движение, функциональный модуль 4 снова смещается вследствие ввода водителем таким образом, чтобы уведомлять водителя относительно того, что операция на функциональном модуле 4 доступна, и относительно того, что автономное транспортное средство A может повторно начинать движение, поскольку отсутствует приближающаяся цель.
[0060] Согласно устройству управления автономным транспортным средством первого варианта осуществления, модуль 3 представления может представлять информацию относительно временного интервала переключения между первым режимом автономного движения и вторым режимом автономного движения водителю. Водитель в силу этого может начинать или завершать управлять функциональным модулем 4 без длительного интервала, когда режимы автономного движения переключаются.
[0061] Дополнительно, поскольку устройство управления автономным транспортным средством первого варианта осуществления представляет текущий режим автономного движения водителю, водитель может постоянно распознавать необходимость операции на функциональном модуле 4 согласно текущему режиму автономного движения.
[0062] Второй вариант осуществления
Устройство управления автономным транспортным средством согласно второму варианту осуществления отличается от устройства управления автономным транспортным средством согласно первому варианту осуществления тем, что контроллер 2 дополнительно включает в себя модуль 23 задания верхнего предела рабочей степени, и функциональный модуль 4 дополнительно включает в себя механизм 41 регулирования рабочей степени, как показано на фиг. 9. Операции и преимущества во втором варианте осуществления, практически идентичные операциям и преимуществам в первом варианте осуществления, не повторяются ниже.
[0063] Механизм 41 регулирования рабочей степени обнаруживает, по меньшей мере, одно из величины смещения, силы, числа операций, рабочей скорости и рабочего направления функционального модуля 4 в качестве рабочей степени, задаваемой водителем. Механизм 41 регулирования рабочей степени выводит выходной сигнал, соответствующий обнаруженной рабочей степени, в модуль 5 управления транспортного средства. Рабочая степень, задаваемая водителем, может задаваться ступенчатым или непрерывным способом.
[0064] Когда функциональный модуль 4 представляет собой, например, кнопочное устройство ввода, рабочая степень может регулироваться в зависимости от величины смещения, силы и числа нажатий, вызываемых посредством операции. Когда функциональный модуль 4 представляет собой, например, рычажное устройство ввода, рабочая степень может регулироваться в зависимости от величины смещения, силы и направления операции. Когда функциональный модуль 4 представляет собой, например, педальное устройство ввода, рабочая степень может регулироваться в зависимости от величины смещения и силы относительно функционального модуля 4. В качестве альтернативы этим устройствам ввода, может использоваться устройство ввода, смещенное в горизонтальном и вертикальном направлениях.
[0065] Модуль 5 управления транспортного средства регулирует состояние движения автономного транспортного средства A в зависимости от рабочей степени, обнаруженной посредством механизма 41 регулирования рабочей степени. Примеры состояний движения, которые должны регулироваться, включают в себя скорость, ускорение, позицию остановки и позицию движения автономного транспортного средства A. Позиция остановки и позиция движения могут регулироваться в направлении слева направо относительно направления движения. Например, модуль 5 управления транспортного средства может управлять приводной системой, когда функциональный модуль 4 управляется в вертикальном направлении, таким образом, чтобы регулировать скорость автономного транспортного средства A, и управлять системой рулевого управления, когда функциональный модуль 4 управляется в направлении слева направо из числа горизонтальных направлений, таким образом, чтобы регулировать позицию движения автономного транспортного средства A в направлении слева направо.
[0066] Модуль 23 задания верхнего предела рабочей степени задает верхний предел для выходного сигнала, выводимого из функционального модуля 4 в модуль 5 управления транспортного средства, соответствующего рабочей степени водителем во втором режиме автономного движения. Например, когда имеется слепая зона около автономного транспортного средства A, модуль 23 задания верхнего предела рабочей степени задает верхний предел для рабочей степени (выходного сигнала) в зависимости от расстояния до слепой зоны или размера слепой зоны. Например, модуль 23 задания верхнего предела рабочей степени уменьшает верхний предел по мере того, как слепая зона становится больше, и увеличивает верхний предел по мере того, как слепая зона становится меньше.
[0067] Модуль 3 представления может функционировать в качестве модуля уведомления для уведомления водителя относительно того, что рабочая степень водителем достигает верхнего предела, заданного посредством модуля 23 задания верхнего предела рабочей степени. Уведомление относительно того, что рабочая степень достигает верхнего предела, выполняется посредством звука, такого как предупредительный звуковой сигнал, или посредством индикатора, такого как предложение с уведомлением. Альтернативно, функциональный модуль 4 для обнаружения величины смещения операции может механически задавать верхний предел для смещения, вызываемого водителем, так что он функционирует в качестве модуля уведомления.
[0068] Способ управления автономным транспортным средством
Способ управления автономным транспортным средством с использованием устройства управления автономным транспортным средством согласно второму варианту осуществления проиллюстрирован со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 10. Процесс на этапах S201-S204, S206, S207, S209 и S210 является идентичным процессу на этапах S101-S106, S108 и S109, и перекрывающиеся пояснения не повторяются ниже.
[0069] На этапе S205, модуль 23 задания верхнего предела рабочей степени задает верхний предел для выходного сигнала, на основе слепой зоны, обнаруженной на этапе S203, обозначающего рабочую степень водителем во втором режиме автономного движения и выводимого из функционального модуля 4 в модуль 5 управления транспортного средства.
[0070] На этапе S208, модуль 5 управления транспортного средства переключается из первого режима автономного движения на второй режим автономного движения, когда автономное транспортное средство A въезжает в рабочий участок R. Модуль 5 управления транспортного средства управляет автономным транспортным средством A таким образом, что оно движется во втором режиме автономного движения при регулировании состояния движения в зависимости от рабочей степени на функциональном модуле 4 водителя согласно условиям движения и окружающим условиям. Поскольку рабочая степень, вводимая в модуль 5 управления транспортного средства, не превышает верхний предел, заданный на этапе S205, модуль 5 управления транспортного средства может обеспечивать безопасность во втором режиме автономного движения.
[0071] Пример работы
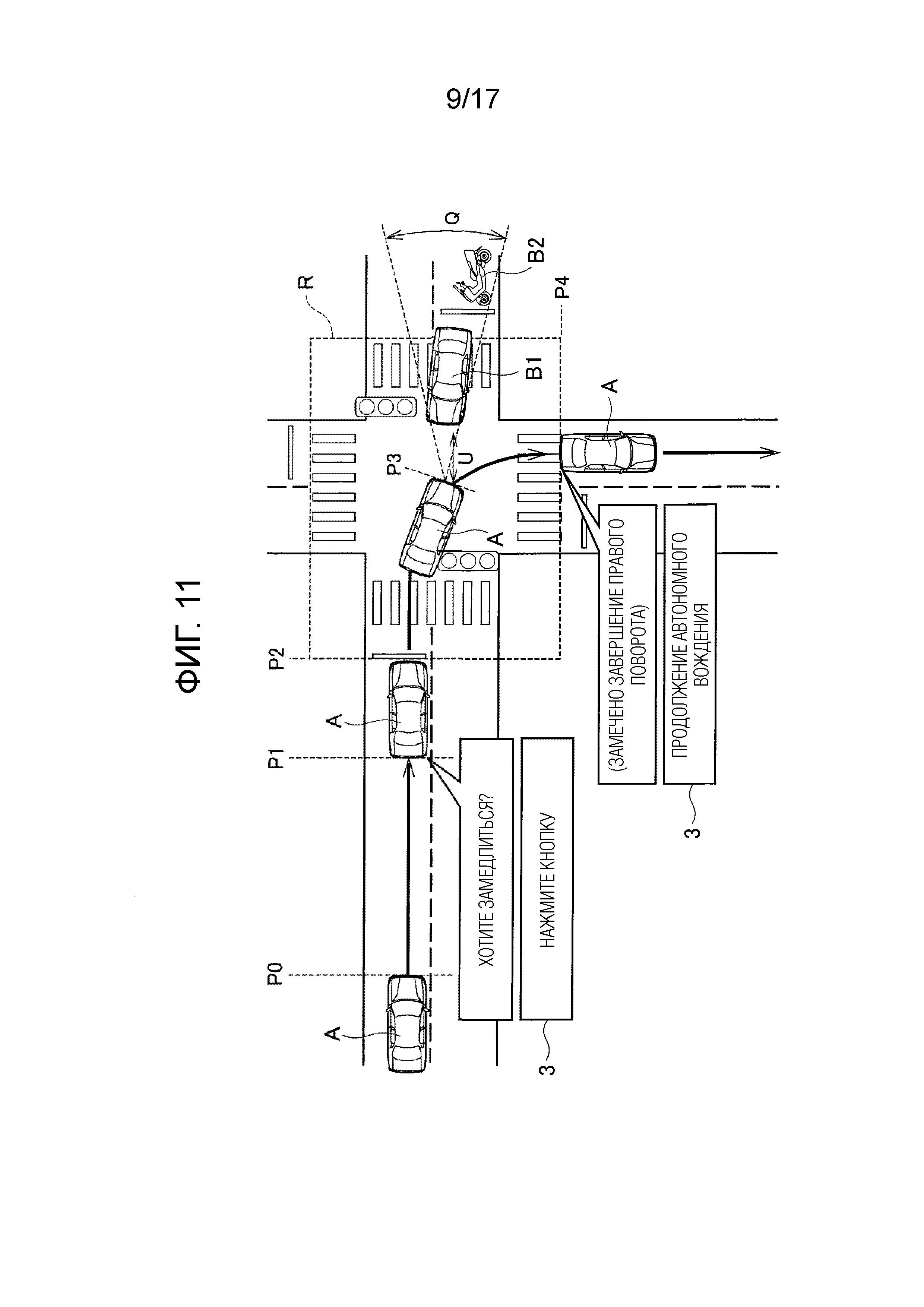
Фиг. 11 иллюстрирует пример работы устройства управления автономным транспортным средством согласно второму варианту осуществления в случае, если автономное транспортное средство A поворачивает направо на перекрестке.
[0072] Когда автономное транспортное средство A проезжает через точку P0, модуль 5 управления транспортного средства управляет автономным транспортным средством A в первом режиме автономного движения таким образом, что оно движется без операции водителя согласно условиям движения и окружающим условиям.
[0073] Когда автономное транспортное средство A достигает точки P1, модуль 21 определения слепых зон обнаруживает слепую зону Q, возникающую за счет транспортного средства B1, в качестве участника дорожного движения на перекрестке в направлении движения автономного транспортного средства A. Модуль 22 задания рабочего участка задает рабочий участок R, поскольку слепая зона Q обнаруживается.
[0074] Модуль 31 представления рабочего участка указывает предложение "Нажмите кнопку", например, с тем чтобы представлять информацию, предварительно уведомляющую водителя относительно того, что текущий режим автономного движения должен переключаться на второй режим автономного движения. Водитель начинает управление функциональным модулем 4 в соответствии с представленной информацией.
[0075] Когда автономное транспортное средство A достигает точки P2 (начальной точки рабочего участка R), модуль 5 управления транспортного средства задает текущий режим движения как второй режим автономного движения при регулировании состояния движения в зависимости от рабочей степени водителем.
[0076] Когда автономное транспортное средство A начинает поворот направо и достигает точки P3, водитель прекращает управление функциональным модулем 4, чтобы проверять то, что отсутствует риск столкновения с другим транспортным средством B2, который может появляться из слепой зоны, вызываемой посредством транспортного средства B1. Автономное транспортное средство A затем останавливается в точке P3. Модуль 21 определения слепых зон вычисляет расстояние до точки, в которой транспортное средство B2 может появляться из слепой зоны Q, в качестве расстояния до слепой зоны Q, согласно расстоянию U до транспортного средства B1 и размеру транспортного средства B1. Модуль 23 задания верхнего предела рабочей степени задает верхний предел для рабочей степени согласно расстоянию до слепой зоны Q.
[0077] Когда автономное транспортное средство A достигает точки P4 (конечной точки рабочего участка R), модуль 31 представления рабочего участка воспроизводит звук, к примеру, предупредительный звуковой сигнал, и указывает предложение "Продолжайте автономное вождение", например, с тем чтобы представлять информацию, уведомляющую водителя относительно того, что текущий режим автономного движения переключается на первый режим автономного движения. Водитель прекращает управление функциональным модулем 4 в соответствии с представленной информацией.
[0078] Альтернативно, модуль 23 задания верхнего предела рабочей степени может вычислять допустимый запас времени до столкновения с приближающейся целью согласно расстоянию до цели независимо от присутствия или отсутствия слепой зоны, с тем чтобы задавать верхний предел для рабочей степени. Поскольку модуль 23 задания верхнего предела рабочей степени задает верхний предел для рабочей степени, когда участник дорожного движения приближается, точность в предотвращении столкновения с участником дорожного движения повышается, с тем чтобы повышать безопасность автономного транспортного средства A.
[0079] Модуль 23 задания верхнего предела рабочей степени также может задавать верхний предел для рабочей степени в зависимости от числа целей, которые должны проверяться около автономного транспортного средства A. Точность в предотвращении столкновения с другими участниками дорожного движения в силу этого может повышаться, с тем чтобы повышать безопасность автономного транспортного средства A.
[0080] Модуль 23 задания верхнего предела рабочей степени также может задавать верхний предел для рабочей степени в зависимости от указанных целей, которые должны проверяться, действия которых трудно ожидать, около автономного транспортного средства A. Дошкольники, школьники и велосипеды задаются как указываемые цели, которые должны проверяться, действия которых трудно ожидать. Модуль 23 задания верхнего предела рабочей степени задает верхний предел для рабочей степени, когда имеется предварительно указанная цель около автономного транспортного средства A, с тем чтобы повышать точность в предотвращении столкновения с другим участником дорожного движения и повышать безопасность автономного транспортного средства A.
[0081] Модуль 23 задания верхнего предела рабочей степени также может задавать верхний предел для рабочей степени в зависимости от уровня трудности при обнаружении окружающих условий посредством детектора 12 окружающих условий. Уровень трудности может определяться, например, согласно яркости окружения и погоде. Модуль 23 задания верхнего предела рабочей степени задает верхний предел для рабочей степени, когда уровень трудности при обнаружении окружающих условий составляет предварительно определенное пороговое значение или больше, с тем чтобы повышать точность в предотвращении столкновения с другими участниками дорожного движения и повышать безопасность автономного транспортного средства A.
[0082] Как описано выше, устройство управления автономным транспортным средством согласно второму варианту осуществления может регулировать состояние движения в зависимости от рабочей степени на функциональном модуле 4 водителя в течение периода, в который автономное транспортное средство A движется во втором режиме автономного движения. Соответственно, водитель может отражать намерение, когда водитель хочет регулировать состояние движения, к примеру, скорость автономного транспортного средства A, движущегося во втором режиме автономного движения.
[0083] Устройство управления автономным транспортным средством согласно второму варианту осуществления может механически или электрически задавать верхний предел для выходного сигнала, выводимого из функционального модуля 4 в модуль 5 управления транспортного средства. Соответственно, состояние движения автономного транспортного средства A во втором режиме автономного движения может поддерживаться в предварительно определенном диапазоне, с тем чтобы повышать безопасность автономного транспортного средства A.
[0084] Устройство управления автономным транспортным средством согласно второму варианту осуществления может задавать верхний предел для выходного сигнала, когда имеется слепая зона, вызываемая посредством помехи, в соответствии, по меньшей мере, либо с расстоянием до слепой зоны, либо с размером слепой зоны. Соответственно, предотвращение столкновения с участником дорожного движения в зависимости от слепой зоны может улучшаться, и безопасность автономного транспортного средства A может стимулироваться.
[0085] Устройство управления автономным транспортным средством второго варианта осуществления может уведомлять водителя относительно того, что рабочая степень достигает верхнего предела, так что модуль 3 представления функционирует в качестве модуля уведомления. Водитель в силу этого может распознавать то, что автономное транспортное средство A управляется регулярно, когда автономное транспортное средство A не движется в состоянии движения, соответствующем рабочей степени на функциональном модуле 4, вследствие модуля 3 представления, служащего в качестве модуля уведомления.
[0086] Третий вариант осуществления
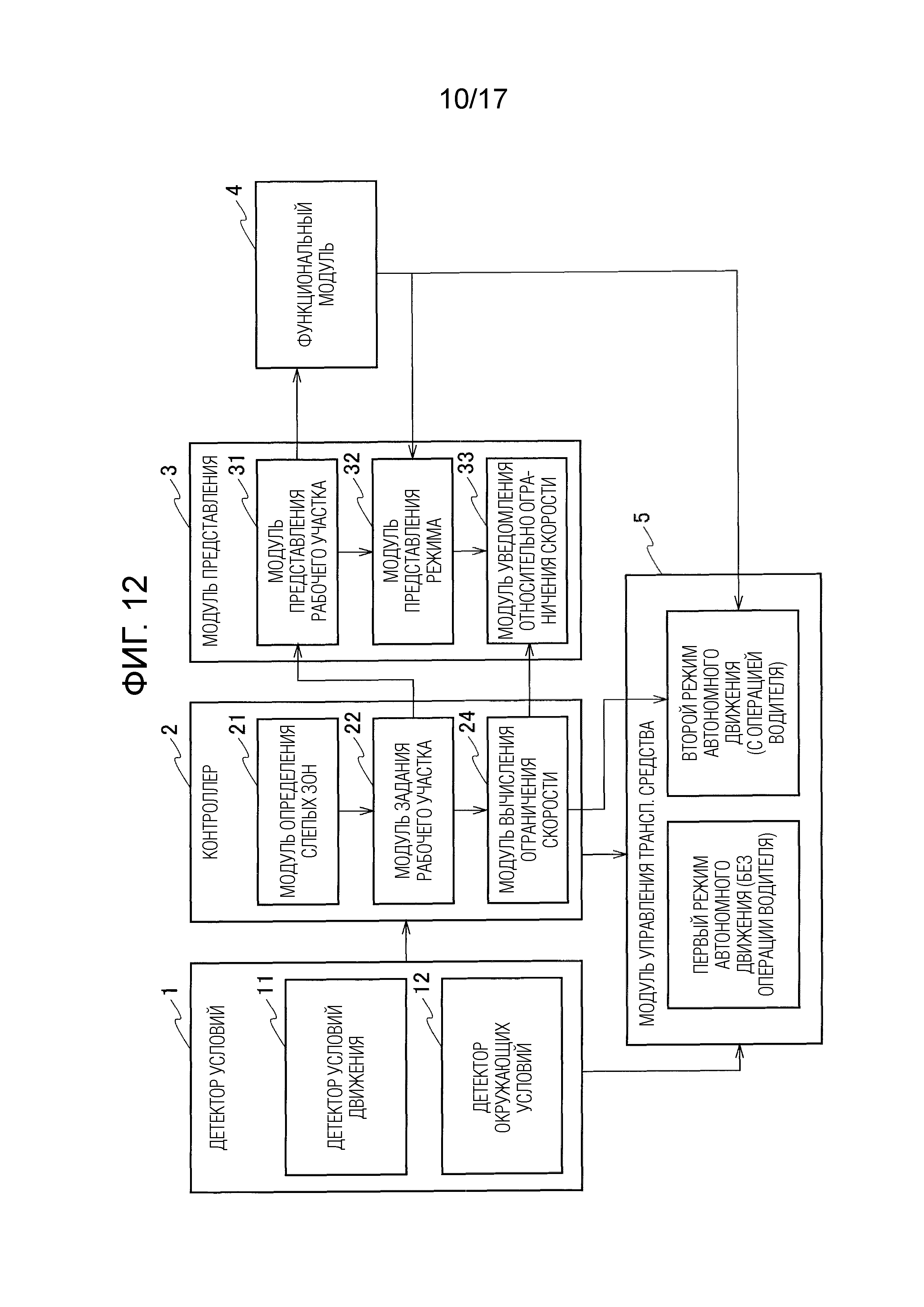
Устройство управления автономным транспортным средством согласно третьему варианту осуществления отличается от устройства управления автономным транспортным средством согласно первому и второму вариантам осуществления тем, что контроллер 2 дополнительно включает в себя модуль 24 вычисления ограничения скорости, и модуль 3 представления дополнительно включает в себя модуль 33 уведомления относительно ограничения скорости, как показано на фиг. 12. Операции и преимущества в третьем варианте осуществления, практически идентичные операциям и преимуществам в первом и втором вариантах осуществления, не повторяются ниже.
[0087] Модуль 24 вычисления ограничения скорости вычисляет ограничение скорости автономного транспортного средства A, движущегося во втором режиме автономного движения, согласно условиям движения, обнаруженным посредством детектора 11 условий движения, и окружающим условиям, обнаруженным посредством детектора 12 окружающих условий.
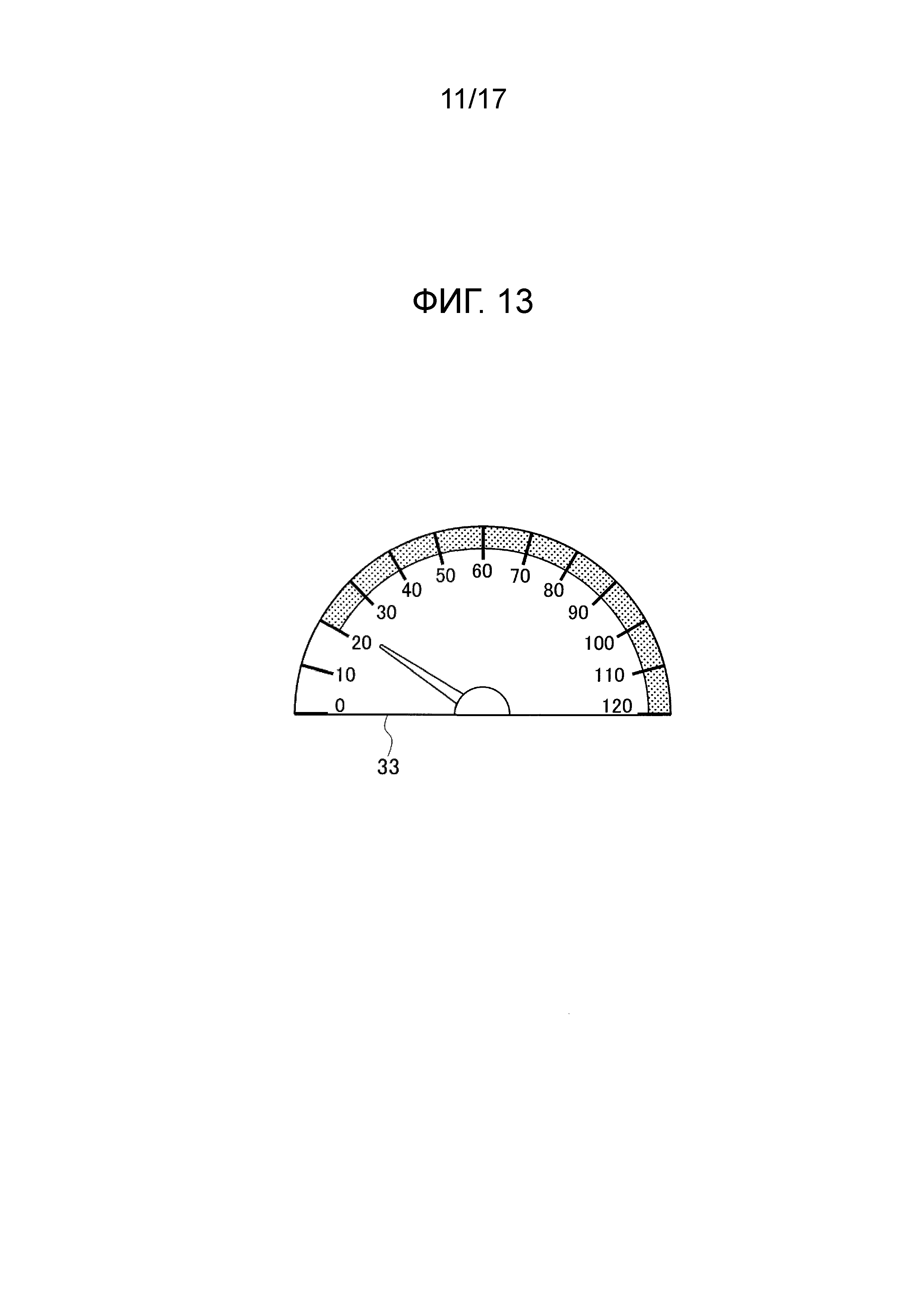
[0088] Модуль 33 уведомления относительно ограничения скорости уведомляет водителя относительно ограничения скорости, вычисленного посредством модуля 24 вычисления ограничения скорости. Например, модуль 33 уведомления относительно ограничения скорости может указывать ограничение скорости посредством изменения градуировок на спидометре, как показано на фиг. 13.
[0089] Способ управления автономным транспортным средством
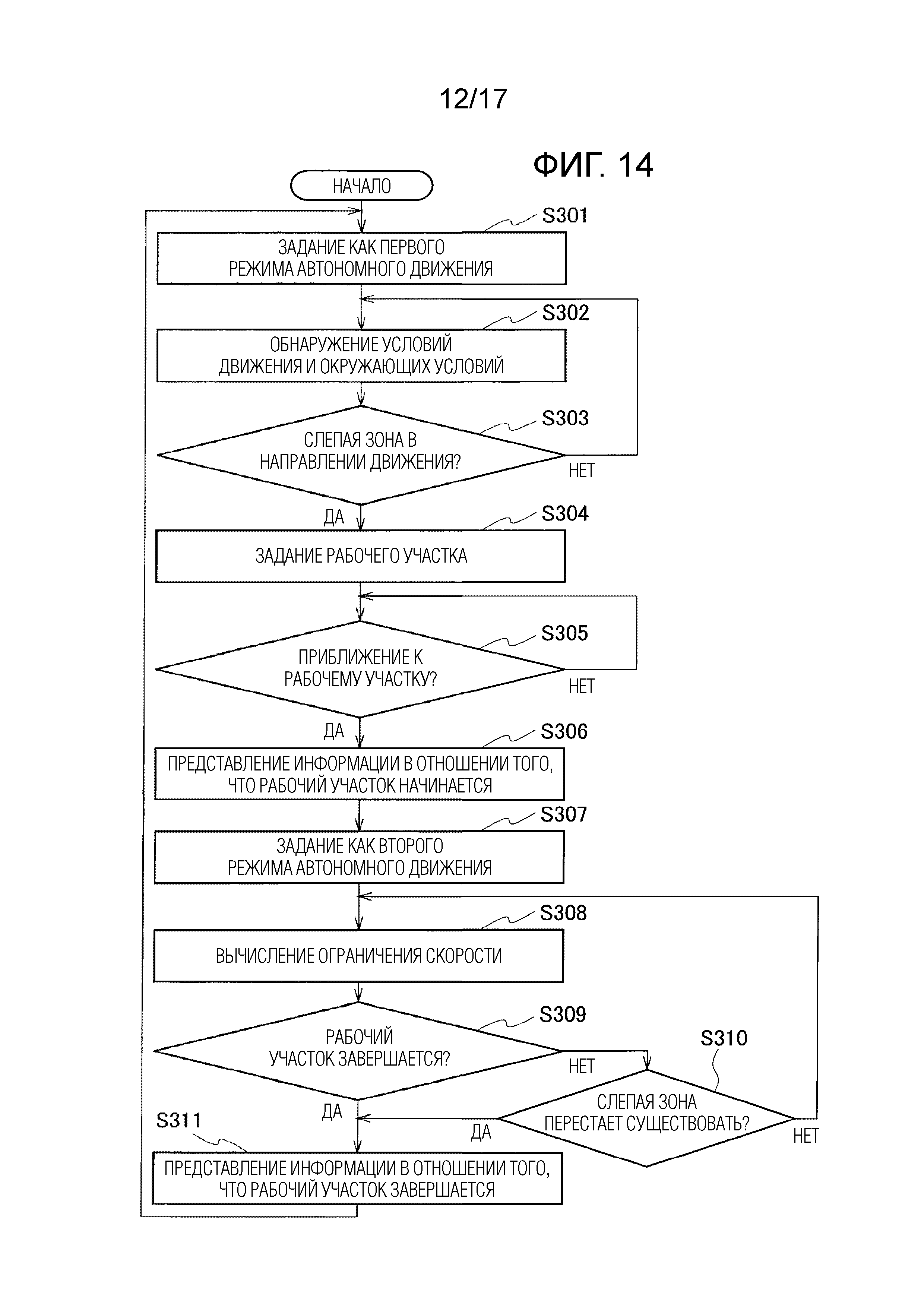
Способ управления автономным транспортным средством с использованием устройства управления автономным транспортным средством согласно третьему варианту осуществления проиллюстрирован со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 14. Процесс на этапах S301-S307 является идентичным процессу на этапах S101-S107, и перекрывающиеся пояснения не повторяются ниже.
[0090] На этапе S308, модуль 24 вычисления ограничения скорости вычисляет ограничение скорости во втором режиме автономного движения согласно, по меньшей мере, одному из расстояния до помехи, вызывающей слепую зону, обнаруженного на этапе S303, расстояния до слепой зоны и размера слепой зоны.
[0091] На этапе S309, контроллер 2 определяет то, достигает или нет автономное транспортное средство A конечной точки рабочего участка R. Процесс переходит к этапу S311, когда определяется то, что автономное транспортное средство A достигает конечной точки, либо переходит к этапу S310, когда автономное транспортное средство A еще не достигает конечной точки.
[0092] На этапе S310, модуль 21 определения слепых зон определяет то, перестает или нет слепая зона существовать в направлении движения автономного транспортного средства A. Процесс возвращается к этапу S308, когда слепая зона по-прежнему присутствует, либо переходит к этапу S311, когда слепая зона перестает существовать.
[0093] На этапе S311, модуль 31 представления рабочего участка представляет информацию, уведомляющую водителя в отношении завершения рабочего участка R, и процесс возвращается к этапу S101.
[0094] Пример работы
Фиг. 15 иллюстрирует пример работы устройства управления автономным транспортным средством согласно третьему варианту осуществления в случае, если автономное транспортное средство A поворачивает направо на перекрестке.
[0095] Когда автономное транспортное средство A проезжает через точку P0, модуль 5 управления транспортного средства управляет автономным транспортным средством A в первом режиме автономного движения таким образом, что оно движется без операции водителя согласно условиям движения и окружающим условиям. Автономное транспортное средство A движется со скоростью V.
[0096] Когда автономное транспортное средство A достигает точки P1, модуль 21 определения слепых зон обнаруживает слепую зону Q, возникающую за счет транспортного средства B1, в качестве участника дорожного движения на перекрестке в направлении движения автономного транспортного средства A. Модуль 22 задания рабочего участка задает рабочий участок R, поскольку слепая зона Q обнаруживается.
[0097] Модуль 24 вычисления ограничения скорости вычисляет позицию готовности (точку P3) на перекрестке, на котором автономное транспортное средство A должно ожидать поворота направо, согласно размеру перекрестка, полученному из картографической информации, и позиции транспортного средства B1. Модуль 24 вычисления ограничения скорости также определяет то, имеется или нет пространство, достаточное для транспортного средства B2 (участника дорожного движения), чтобы проезжать через сторону транспортного средства B1 из слепой зоны Q. Когда имеется пространство, модуль 24 вычисления ограничения скорости вычисляет предполагаемую точку PT столкновения, в которой автономное транспортное средство A может сталкиваться с транспортным средством B2, появляющимся из слепой зоны Q.
[0098] Модуль 24 вычисления ограничения скорости затем вычисляет расстояние d от автономного транспортного средства A в предполагаемой позиции готовности до транспортного средства B1, вызывающего слепую зону Q, и обнаруживаемое расстояние D от слепой зоны Q до предполагаемой точки PT столкновения в направлении движения транспортного средства B2. Когда константа пропорциональности, полученная из размера перекрестка, задается как k, обнаруживаемое расстояние D представляется посредством уравнения (1).
D=k x d... (1)
[0099] Модуль 5 управления транспортного средства замедляет автономное транспортное средство A до VLow1 до того, как автономное транспортное средство A достигает точки P2 (начальной точки рабочего участка R). Когда замедление, предварительно заданное для операции нормального торможения, задается как aLow, и расстояние от автономного транспортного средства A до точки P3 (позиции готовности на перекрестке) задается как dt, скорость VLow1, например, представляется посредством уравнения (2). Расстояние dt варьируется по мере того, как расстояние от точки P2 до точки P3 увеличивается, и скорость VLow1 также варьируется, соответственно. Замедление aLow составляет, например, 0,2 G.
VLow1=√(2aLowdt)... (2)
[0100] Когда передний край автономного транспортного средства A въезжает в рабочий участок R, модуль 5 управления транспортного средства переключает текущий режим автономного движения на второй режим автономного движения, с тем чтобы двигаться со скоростью V, соответствующий рабочей степени на функциональном модуле 4 водителя. Верхний предел скорости V задается в диапазоне VLow1≤V≤VHigh1 до тех пор, пока автономное транспортное средство A не достигнет точки P3 после въезда в рабочий участок R. Когда замедление, предварительно заданное для операции экстренного торможения, задается как aHigh, скорость VHigh1, например, представляется посредством уравнения (3). Замедление aHigh1 составляет, например, 0,5 G.
VHigh1=√(2aHighdt)... (3)
[0101] Когда автономное транспортное средство A поворачивает направо из точки P3, модуль 5 управления транспортного средства задает скорость автономного транспортного средства A как VLow2. Когда скорость транспортного средства B2, предполагаемая согласно разрешенной скорости, фактической скорости, типу дороги и т.п., задается как VT, скорость VLow2, например, представляется посредством уравнения (4).
VLow2=(2aLowD)/VT... (4)
[0102] Транспортное средство B2 предполагается как двухколесное транспортное средство, движущееся на уменьшенной скорости, когда имеется одна противоположная полоса движения, и предполагается как четырехколесное транспортное средство или двухколесное транспортное средство, движущееся на обычной скорости, когда имеется более одной противоположной полосы движения. Предполагаемая скорость VT в силу этого может определяться в зависимости от числа противоположных полос движения или пространства на дороге со стороны транспортного средства B1.
[0103] Верхний предел скорости V в рабочем участке R задается в диапазоне VLow1≤V≤VHigh1 до тех пор, пока автономное транспортное средство A не достигнет точки P3, и задается в диапазоне VLow2≤V≤VHigh2 после достижения точки P3. Когда замедление, предварительно заданное для операции экстренного торможения, задается как aHigh, скорость VHigh2, например, представляется посредством уравнения (5).
VHigh2=(2aHighD)/VT... (5)
[0104] Водитель управляет функциональным модулем 4 при проверке того, имеются или нет другие участники дорожного движения, с которыми может сталкиваться автономное транспортное средство A. Модуль 5 управления транспортного средства управляет автономным транспортным средством A таким образом, что оно движется со скоростью, соответствующее рабочей степени водителем, в пределах ограничения скорости, вычисленного посредством модуля 24 вычисления ограничения скорости.
[0105] Ограничение скорости вычисляется согласно, по меньшей мере, одному из расстояния до помехи, расстояния до слепой зоны и размера слепой зоны. Например, когда слепая зона является большой, и время, когда другие участники дорожного движения найдены или обнаружены, предположительно задерживается, замедление предположительно может составлять aLow, заданное для операции нормального торможения, и ограничение скорости может задаваться равным VLow1 или VLow2. Когда слепая зона является небольшой, и другие участники дорожного движения могут быть найдены или обнаружены в ранней точке, замедление предположительно может составлять aHigh, заданное для операции экстренного торможения, и ограничение скорости может задаваться равным VHigh1 или VHigh2.
[0106] Когда автономное транспортное средство A проезжает через точку P4 таким образом, что оно покидает рабочий участок R, модуль 31 представления рабочего участка представляет информацию, уведомляющую водителя относительно того, что второй режим автономного движения переключается на первый режим автономного движения. Водитель прекращает управление функциональным модулем 4 в соответствии с представленной информацией. Модуль 5 управления транспортного средства задает режим движения как первый режим автономного движения, чтобы продолжать автономное движение.
[0107] Например, как показано на фиг. 16 и фиг. 17, ограничение VLow скорости при таком предположении, что замедление составляет aLow, и ограничение VHigh скорости при таком предположении, что замедление составляет aHigh, вычисляется в соответствии с предполагаемой скоростью VT и обнаруживаемым расстоянием D участника дорожного движения. Фиг. 16 иллюстрирует случай, в котором участник дорожного движения, который может появляться из слепой зоны, предполагается как транспортное средство, и предполагаемая скорость VT предположительно составляет 60 км/ч. Фиг. 17 иллюстрирует случай, в котором участник дорожного движения предполагается как пешеход, и предполагаемая скорость VT предположительно составляет 8 км/ч.
[0108] Как описано выше, устройство управления автономным транспортным средством согласно третьему варианту осуществления вычисляет ограничение скорости автономного транспортного средства A в соответствии с условиями автономного транспортного средства A. Автономное транспортное средство A в силу этого может обеспечивать допустимый запас времени, чтобы объезжать других участников дорожного движения при прохождении через рабочий участок R, с тем чтобы уменьшать вероятность столкновения с другими участниками дорожного движения.
[0109] Устройство управления автономным транспортным средством согласно третьему варианту осуществления может вычислять ограничение скорости на основе, по меньшей мере, одного из расстояния до слепой зоны и размера слепой зоны. Например, ограничение скорости может задаваться низким (к примеру, 10 км/ч), когда слепая зона, вызываемая посредством транспортного средства B1, является относительно большой, как показано на фиг. 5, и когда слепая зона, вызываемая посредством помехи на углу перекрестка, является относительно большой, как показано на фиг. 6. Ограничение скорости может задаваться высоким (к примеру, 30 км/ч), когда слепая зона, вызываемая посредством транспортного средства B1, является относительно небольшой, как показано на фиг. 7 или фиг. 8. Соответственно, предотвращение столкновения с другими участниками дорожного движения в зависимости от слепой зоны может улучшаться, с тем чтобы стимулировать безопасность автономного транспортного средства A.
[0110] Устройство управления автономным транспортным средством согласно третьему варианту осуществления может вычислять ограничение скорости на основе предполагаемой скорости VT участника дорожного движения, когда участник дорожного движения предположительно въезжает на дорогу в пределах предварительно определенного расстояния в направлении движения автономного транспортного средства A. Ограничение скорости в силу этого может вычисляться с более высокой точностью, с тем чтобы повышать точность в недопущении участника дорожного движения. Скорость VT предполагается согласно, по меньшей мере, одному из типа, ограничения максимальной скорости и фактической скорости дороги, на которой могут присутствовать другие участники дорожного движения, например, с тем чтобы повышать точность в вычислении ограничения скорости, чтобы обеспечивать допустимый запас времени, чтобы предотвращать столкновение с другими участниками дорожного движения.
[0111] Устройство управления автономным транспортным средством согласно третьему варианту осуществления вычисляет диапазон скоростей автономного транспортного средства A в соответствии с замедлением, предварительно заданным для операции нормального торможения, и замедлением, предварительно заданным для операции экстренного торможения. Соответственно, точность в вычислении ограничения скорости может повышаться, и нагрузка по чрезмерному замедлению, прикладываемая к пассажирам в автономном транспортном средстве A, может уменьшаться.
[0112] Водитель может предварительно выбирать ограничение скорости в пределах диапазона определенного ограничения скорости. Водитель в силу этого может применять тормоз, чтобы объезжать приближающуюся цель при замедлении, которым водитель может позволить себе управлять.
[0113] Четвертый вариант осуществления
Устройство управления автономным транспортным средством согласно четвертому варианту осуществления отличается от устройства управления автономным транспортным средством согласно первому-третьему вариантам осуществления тем, что детектор 1 условий дополнительно включает в себя детектор 13 отслеживания состояния водителя, и контроллер 2 дополнительно включает в себя модуль 25 определения действий по отслеживанию, как показано на фиг. 18. Операции и преимущества в четвертом варианте осуществления, практически идентичные операциям и преимуществам в первом-третьем вариантах осуществления, не повторяются ниже.
[0114] Функциональный модуль 4 в устройстве управления автономным транспортным средством согласно четвертому варианту осуществления может обнаруживать операцию запроса водителя относительно того, чтобы запрашивать сдвиг в рабочем участке R в течение периода, в который автономное транспортное средство движется около границы рабочего участка R. Операция запроса работает на предварительно определенном устройстве ввода (функциональном модуле запросов) для запроса начала или завершения второго режима автономного движения. Операция запроса может выполняться посредством голоса водителя. Альтернативно, операция запроса для запроса начала второго режима автономного движения (операция запроса на начало) может обнаруживаться, когда водитель начинает управление функциональным модулем 4 в течение периода, в который автономное транспортное средство A движется в первом режиме автономного движения.
[0115] Детектор 13 отслеживания состояния водителя обнаруживает, по меньшей мере, движение головы водителя или линию зрения водителя посредством использования камеры, датчика движения и т.п. Примеры движений головы, обнаруженных посредством детектора 13 отслеживания состояния водителя, включают в себя число движений головы, направление движения и рисунок движения. Линия зрения может быть рисунком сдвига глаз.
[0116] Модуль 25 определения действий по отслеживанию определяет то, отслеживает или нет водитель цель, которая должна проверяться, присутствующую около автономного транспортного средства A, согласно, по меньшей мере, движению головы или линии зрения водителя, обнаруженной посредством детектора 13 отслеживания состояния водителя, когда операция запроса обнаруживается посредством предварительно определенного устройства ввода. Модуль 25 определения действий по отслеживанию может определять то, предпринимает или нет водитель действие по отслеживанию, посредством определения того, удовлетворяет либо нет движение головы или линия зрения, обнаруженная посредством детектора 13 отслеживания состояния водителя относительно цели, обнаруженной посредством детектора 12 окружающих условий, предварительно определенным условиям.
[0117] Модуль 25 определения действий по отслеживанию может определять указываемые цели, которые должны проверяться, которые требуют отслеживания согласно предварительно определенным условиям. Модуль 25 определения действий по отслеживанию может определять то, что водитель не предпринимает действие по отслеживанию, когда предварительно указанная цель еще не отслеживается, даже если действие по отслеживанию для того, чтобы отслеживать другую цель, обнаружено.
[0118] Способ управления автономным транспортным средством
Способ управления автономным транспортным средством с использованием устройства управления автономным транспортным средством согласно четвертому варианту осуществления проиллюстрирован со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 19. Процесс на этапах S401-S404 является идентичным процессу на этапах S101-S104, и перекрывающиеся пояснения не повторяются ниже.
[0119] На этапе S405, контроллер 2 определяет то, въезжает или нет автономное транспортное средство A в рабочий участок R. Контроллер 2 определяет то, что автономное транспортное средство A въезжает в рабочий участок R, когда текущая позиция автономного транспортного средства A достигает начальной точки рабочего участка R согласно условиям движения и окружающим условиям. Процесс переходит к этапу S409, когда определяется то, что автономное транспортное средство A въезжает в рабочий участок R, либо переходит к этапу S405, когда автономное транспортное средство A еще не въезжает в рабочий участок R.
[0120] На этапе S406, модуль 25 определения действий по отслеживанию определяет то, обнаруживается или нет операция запроса на начало, в которой водитель запрашивает начало второго режима автономного движения, посредством функционального модуля 4, когда автономное транспортное средство A движется перед начальной точкой рабочего участка R. Процесс переходит к этапу S407, когда операция запроса на начало обнаруживается, или возвращается к этапу S405, когда операция запроса на начало по-прежнему не обнаруживается.
[0121] На этапе S407, модуль 25 определения действий по отслеживанию определяет то, предпринимает или нет водитель предварительное действие по отслеживанию, чтобы отслеживать цель, которая должна проверяться, присутствующую около автономного транспортного средства A, согласно, по меньшей мере, движению головы или линии зрения водителя, обнаруженной посредством детектора 13 отслеживания состояния водителя. Когда определяется то, что действие по отслеживанию предпринимается, модуль 22 задания рабочего участка сдвигает рабочий участок R, заданный на этапе S404, таким образом, чтобы задавать текущую позицию автономного транспортного средства A как начальную точку рабочего участка R в ответ на операцию запроса на начало, и процесс переходит к этапу S409. Когда действие по отслеживанию еще не предпринято, процесс переходит к этапу S408.
[0122] На этапе S408, модуль 3 представления уведомляет водителя относительно того, что запрос на то, чтобы начинать второй режим автономного движения, отменяется.
[0123] На этапе S409, модуль 31 представления рабочего участка представляет информацию, уведомляющую водителя относительно того, что рабочий участок R, а именно, второй режим автономного движения начинается.
[0124] На этапе S410, модуль 5 управления транспортного средства задает текущий режим автономного движения как второй режим автономного движения, поскольку автономное транспортное средство A въезжает в рабочий участок R. Модуль 5 управления транспортного средства управляет автономным транспортным средством A во втором режиме автономного движения таким образом, что оно движется в состоянии движения, соответствующем рабочей степени на функциональном модуле 4 водителя согласно условиям движения и окружающим условиям.
[0125] На этапе S411, контроллер 2 определяет то, покидает или нет автономное транспортное средство A рабочий участок R. Контроллер 2 определяет то, что автономное транспортное средство A покидает рабочий участок R, когда текущая позиция автономного транспортного средства A достигает конечной точки рабочего участка R согласно условиям движения и окружающим условиям. Процесс переходит к этапу S415, когда автономное транспортное средство покидает рабочий участок R, или повторяет этап S412, когда автономное транспортное средство A еще не покидает рабочий участок R.
[0126] На этапе S412, процесс возвращается к этапу S411, когда операция для запроса определения действий по отслеживанию не обнаруживается.
[0127] На этапе S413, модуль 25 определения действий по отслеживанию определяет то, предпринимает или нет водитель действие по отслеживанию, чтобы предварительно отслеживать цель, которая должна проверяться, присутствующую около автономного транспортного средства A, согласно, по меньшей мере, движению головы или линии зрения водителя, обнаруженной посредством детектора 13 отслеживания состояния водителя. Когда определяется то, что действие по отслеживанию предпринимается, модуль 22 задания рабочего участка сдвигает рабочий участок R, заданный на этапе S404, таким образом, чтобы задавать текущую позицию автономного транспортного средства A как конечную точку рабочего участка R в ответ на операцию запроса на завершение, и процесс переходит к этапу S415. Когда действие по отслеживанию еще не предпринято, процесс переходит к этапу S414.
[0128] На этапе S414, модуль 3 представления уведомляет водителя относительно того, что запрос на то, чтобы завершать второй режим автономного движения, отменяется.
[0129] На этапе S415, модуль 31 представления рабочего участка представляет информацию, уведомляющую водителя относительно того, что рабочий участок R завершается, и процесс возвращается к этапу S401.
[0130] Пример работы
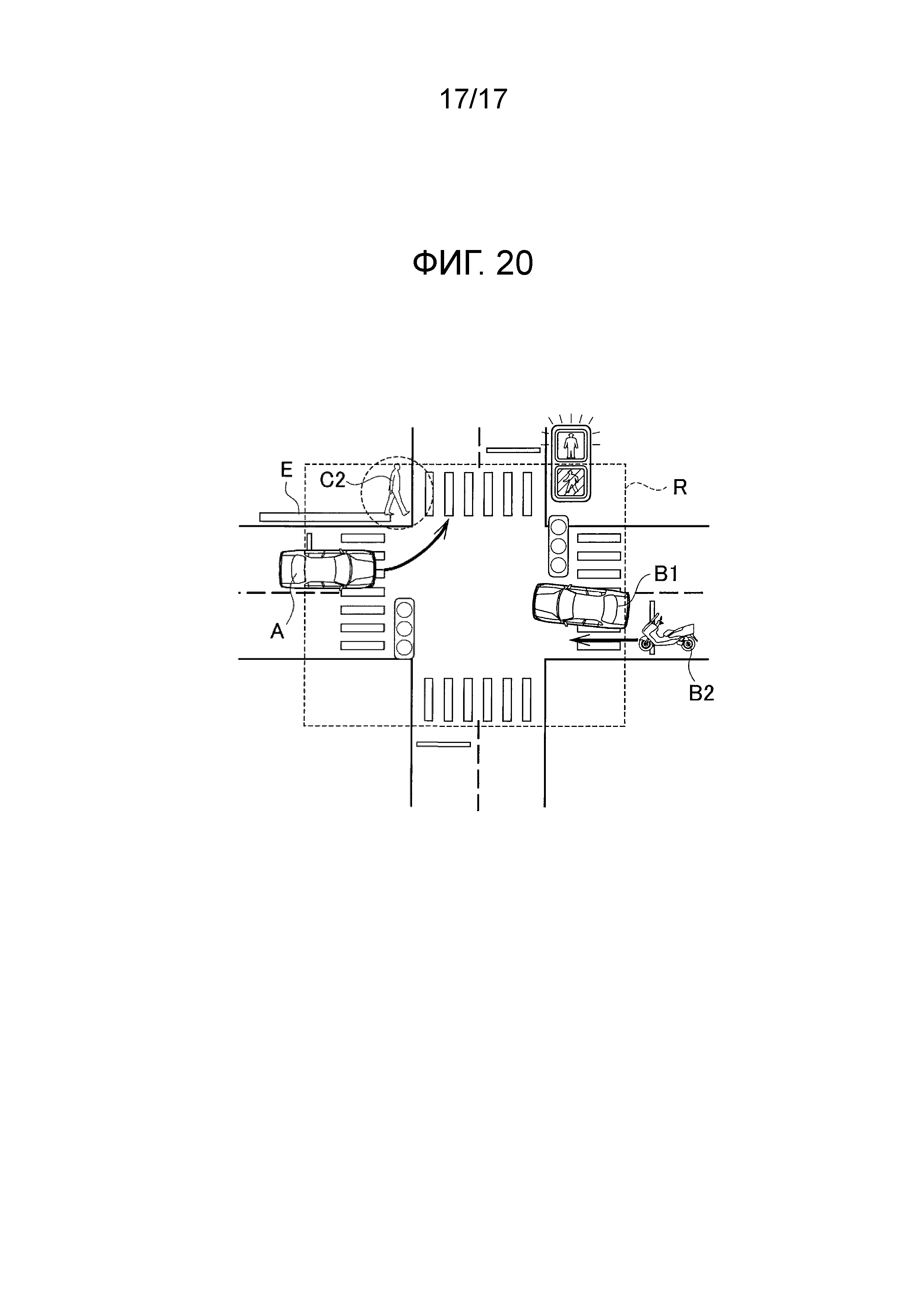
Фиг. 20 иллюстрирует пример работы устройства управления автономным транспортным средством согласно четвертому варианту осуществления в случае, если автономное транспортное средство A поворачивает налево на перекрестке.
[0131] Когда автономное транспортное средство A движется в первом режиме автономного движения, модуль 22 задания рабочего участка задает рабочий участок R, например, на перекрестке, на котором присутствует слепая зона, вызываемая посредством помехи E. Автономное транспортное средство A замедляется до скорости VLow до въезда в рабочий участок R в первом режиме автономного движения. Водитель предположительно отслеживает пешехода C2 в слепой зоне, вызываемой посредством помехи E, и проверяет то, что отсутствует риск столкновения с пешеходом C2. Детектор 13 отслеживания состояния водителя обнаруживает, по меньшей мере, движение головы или линию зрения водителя при действии по отслеживанию, чтобы отслеживать пешехода C2.
[0132] Модуль 25 определения действий по отслеживанию определяет то, предпринимает или нет водитель действие по отслеживанию, чтобы отслеживать пешехода C2, с которым может сталкиваться автономное транспортное средство A, в соответствии с результатом обнаружения посредством детектора 13 отслеживания состояния водителя в ответ на операцию запроса на начало на функциональном модуле 4 водителя. Модуль 22 задания рабочего участка сдвигает рабочий участок R таким образом, чтобы задавать текущую позицию автономного транспортного средства A как начальную точку рабочего участка R, когда модуль 25 определения действий по отслеживанию определяет то, что водитель предпринимает действие по отслеживанию.
[0133] А именно, модуль 5 управления транспортного средства может переключать первый режим автономного движения автономного транспортного средства A, движущегося перед рабочим участком R, на второй режим автономного движения в ответ на операцию запроса на начало водителя, с тем чтобы управлять автономным транспортным средством A таким образом, что оно движется, например, в пределах ограничения скорости, вычисленного посредством модуля 24 вычисления ограничения скорости.
[0134] Когда автономное транспортное средство A движется в рабочем участке R во втором режиме автономного движения, водитель предположительно отслеживает цель, которая должна проверяться, к примеру, пешехода C2, и проверяет то, что отсутствует риск столкновения с целью. Модуль 25 определения действий по отслеживанию определяет то, предпринимает или нет водитель действие по отслеживанию, чтобы отслеживать цель, которая должна проверяться, в соответствии с результатом обнаружения посредством детектора 13 отслеживания состояния водителя в ответ на операцию запроса на завершение на функциональном модуле 4 водителя. Модуль 22 задания рабочего участка сдвигает рабочий участок R таким образом, чтобы задавать текущую позицию автономного транспортного средства A как конечную точку рабочего участка R, когда модуль 25 определения действий по отслеживанию определяет то, что водитель предпринимает действие по отслеживанию.
[0135] А именно, модуль 5 управления транспортного средства может переключать второй режим автономного движения автономного транспортного средства A, движущегося перед конечной точкой рабочего участка R, на первый режим автономного движения в ответ на операцию запроса на завершение водителя.
[0136] Как описано выше, устройство управления автономным транспортным средством согласно четвертому варианту осуществления определяет то, предпринимает или нет водитель действие по отслеживанию в ответ на операцию запроса водителя, с тем чтобы сдвигать рабочий участок R, когда действие по отслеживанию предпринимается. Устройство управления автономным транспортным средством согласно четвертому варианту осуществления в силу этого может отражать намерение водителя при обеспечении безопасности, даже когда временной интервал изменения рабочего участка R отличается между определением системы и намерением водителя.
[0137] Устройство управления автономным транспортным средством согласно четвертому варианту осуществления может начинать или завершать второй режим автономного движения в ответ на операцию запроса водителя относительно того, чтобы запрашивать начало или завершение второго режима автономного движения. Следовательно, дискомфорт водителя может уменьшаться, поскольку водитель может начинать или завершать второй режим автономного движения, когда водитель предварительно проверяет безопасность перед начальной точкой или конечной точкой рабочего участка R.
[0138] Устройство управления автономным транспортным средством согласно четвертому варианту осуществления определяет то, предпринимает или нет водитель действие по отслеживанию, чтобы отслеживать цель, которая должна проверяться, согласно, по меньшей мере, движению головы или линии зрения водителя, с тем чтобы повышать точность в определении присутствия или отсутствия действия по отслеживанию. Устройство управления автономным транспортным средством разрешает сдвиг в рабочем участке R только тогда, когда действие по отслеживанию предпринимается, с тем чтобы обеспечивать безопасность во время переключения между режимами автономного движения.
[0139] Дополнительно, устройство управления автономным транспортным средством согласно четвертому варианту осуществления определяет то, что водитель не предпринимает действие по отслеживанию, когда предварительно указанная цель еще не отслеживается, даже если действие по отслеживанию, чтобы отслеживать другую цель, обнаружено. Устройство управления автономным транспортным средством отменяет запрос на то, чтобы переключаться между режимами автономного движения, когда водитель не предпринимает действие по отслеживанию, чтобы отслеживать указанную цель с большей степенью важности, например, с тем чтобы снижать риск столкновения и т.п. вследствие невозможности проверять цель водителем.
[0140] Другие варианты осуществления
Хотя настоящее изобретение описано выше со ссылкой на первый-четвертый варианты осуществления, следует понимать, что настоящее изобретение не имеет намерение быть ограниченным описаниями и чертежами, составляющими часть этого раскрытия сущности. Различные альтернативные варианты осуществления, примеры и технические варианты применения должны становиться очевидными для специалистов в данной области техники согласно этому раскрытию сущности.
[0141] Например, в первом-четвертом вариантах осуществления, модуль 22 задания рабочего участка может сбрасывать рабочий участок R, чтобы переключать второй режим автономного движения на первый режим автономного движения, когда транспортное средство B1 в качестве помехи проезжает через перекресток, например, и слепая зона Q в силу этого перестает существовать.
[0142] Соответствующие функции в первом-четвертом вариантах осуществления могут реализовываться в одной или нескольких схем обработки. Каждая схема обработки включает в себя программируемый модуль обработки, включающий в себя электрическую схему. Каждая схема обработки также включает в себя специализированную интегральную схему (ASIC) или традиционные схемные компоненты, выполненные с возможностью реализовывать функции, как описано в соответствующих вариантах осуществления.
[0143] Характерные элементы, включенные в соответствующие устройства управления автономным транспортным средством согласно первому-четвертому вариантам осуществления, могут комбинироваться между собой надлежащим образом и взаимно применяться без технического противоречия. Совершенно очевидно, что настоящее изобретение может включать в себя различные варианты осуществления, не описанные в данном документе. Следовательно, объем настоящего изобретения задается только посредством надлежащим образом интерпретированной прилагаемой формулы изобретения.
Список номеров ссылок
[0144] 3 - модуль представления
4 - функциональный модуль
5 - модуль управления транспортного средства
11 - детектор условий движения
12 - детектор окружающих условий
22 - модуль задания рабочего участка
23 - модуль задания верхнего предела рабочей степени
24 - модуль вычисления ограничения скорости
25 - модуль определения действий по отслеживанию
31 - модуль представления рабочего участка (модуль представления)
32 - модуль представления режима (модуль представления)
Реферат
Автономное транспортное средство имеет первый режим автономного движения и второй режим полуавтономного движения. В способе управления таким транспортным средством задают рабочий участок, в котором оно движется во втором режиме автономного движения согласно состоянию движения и окружающему состоянию, и обнаруживают операцию, выполняемую водителем. Автономным транспортным средством управляют таким образом, что оно движется во втором режиме автономного движения, когда операция водителем обнаруживается в течение периода, в который автономное транспортное средство движется в рабочем участке. Автономным транспортным средством управляют, чтобы останавливать его, когда операция водителя не обнаруживается. Автономное транспортное средство автономно останавливается во втором режиме автономного движения, независимо от операции водителя, когда обнаруживается цель, приближающаяся к автономному транспортному средству. Повышается безопасность автономного транспортного средства. 2 н. и 31 з.п. ф-лы, 20 ил.
Комментарии