Способ помощи при движении и устройство помощи при движении - RU2743829C1
Код документа: RU2743829C1
Чертежи

Описание
Область техники
[0001] Настоящее изобретение относится к способу помощи при движении и устройству помощи при движении транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Патентный документ 1 раскрывает, что контролируют предысторию движения для каждого водителя в ходе ручного вождения, а во время автономного вождения обеспечивают подходящий для каждого человека стиль вождения в отношении множества водителей.
СПИСОК ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003] Патентный документ 1: выложенная публикация заявки на патент Японии № 2016–216021.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004] Однако в примере, раскрытом в патентном документе 1, требуется датчик для осуществления распознавания лиц и распознавания отпечатков пальцев для идентификации водителя, который выполняет вождение в ходе ручного вождения. Между тем, существует способ идентификации водителя на основе операции переключения водителем без использования датчика, как описано выше для идентификации человека. Тем не менее, когда водитель забывает включить переключатель или имеет место пропуск настройки, способ не может справиться с ситуацией.
[0005] Настоящее изобретение было создано с учетом такой проблемы. Задача настоящего изобретения состоит в том, чтобы предложить такие способ помощи при движении и устройство помощи при движении транспортного средства, которые идентифицируют водителя, не требуя датчика для идентификации водителя или избыточных операций.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006] Чтобы решить вышеупомянутую проблему, способ помощи при движении и устройство помощи при движении в соответствии с одним аспектом настоящего изобретения идентифицируют водителя с использованием характеристик вождения в ходе ручного вождения водителем и выполняют управление движением, соответствующее идентифицированному водителю.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007] Согласно настоящему изобретению, поскольку водитель может быть идентифицирован с использованием характеристик вождения в ходе ручного вождения, может быть выполнена соответствующая помощь при движении, подходящая для этого водителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
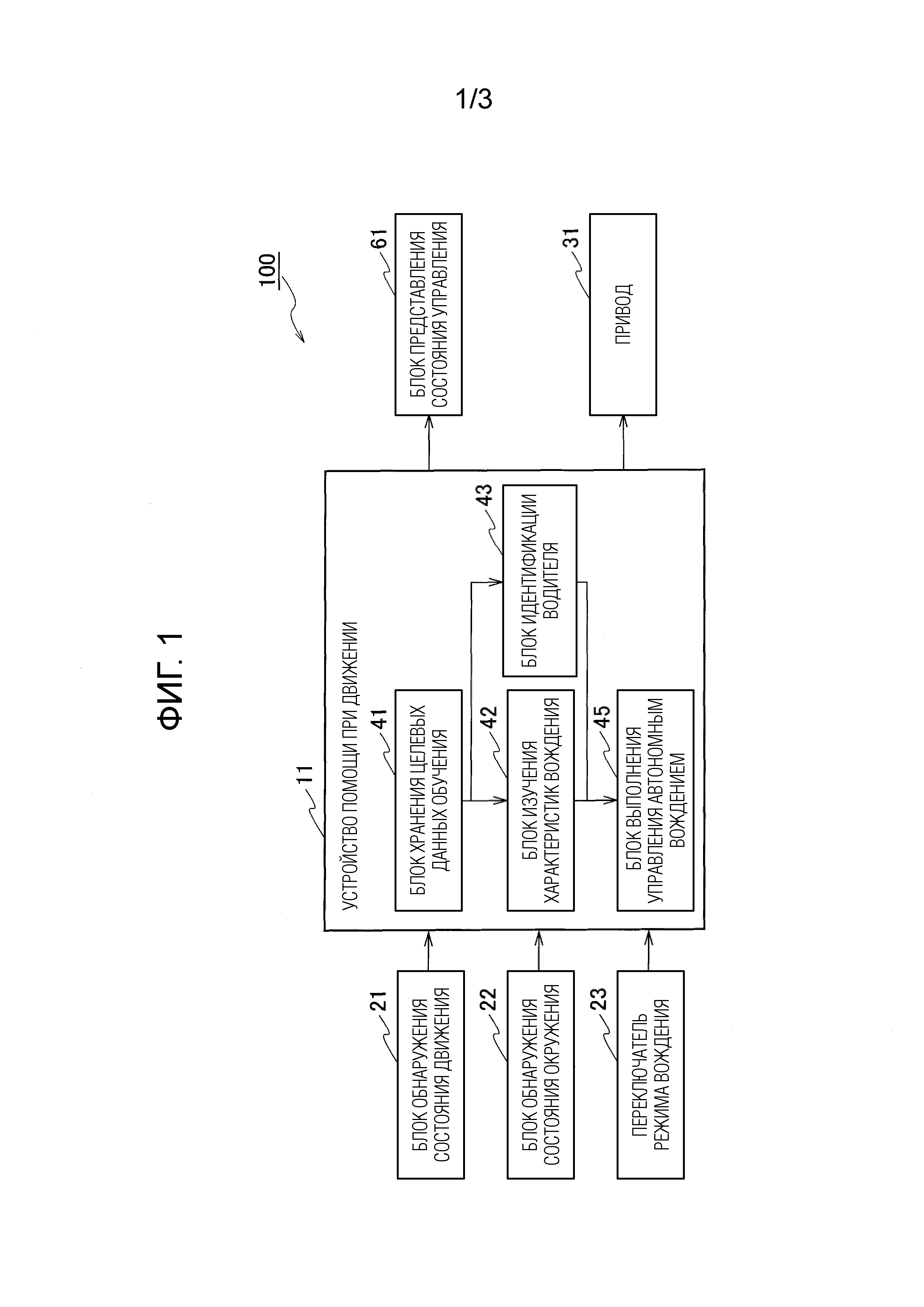
[0008] Фиг. 1 представляет собой блок–схему, иллюстрирующую конфигурацию системы управления вождением, включающей в себя устройство помощи при движении согласно варианту осуществления настоящего изобретения.
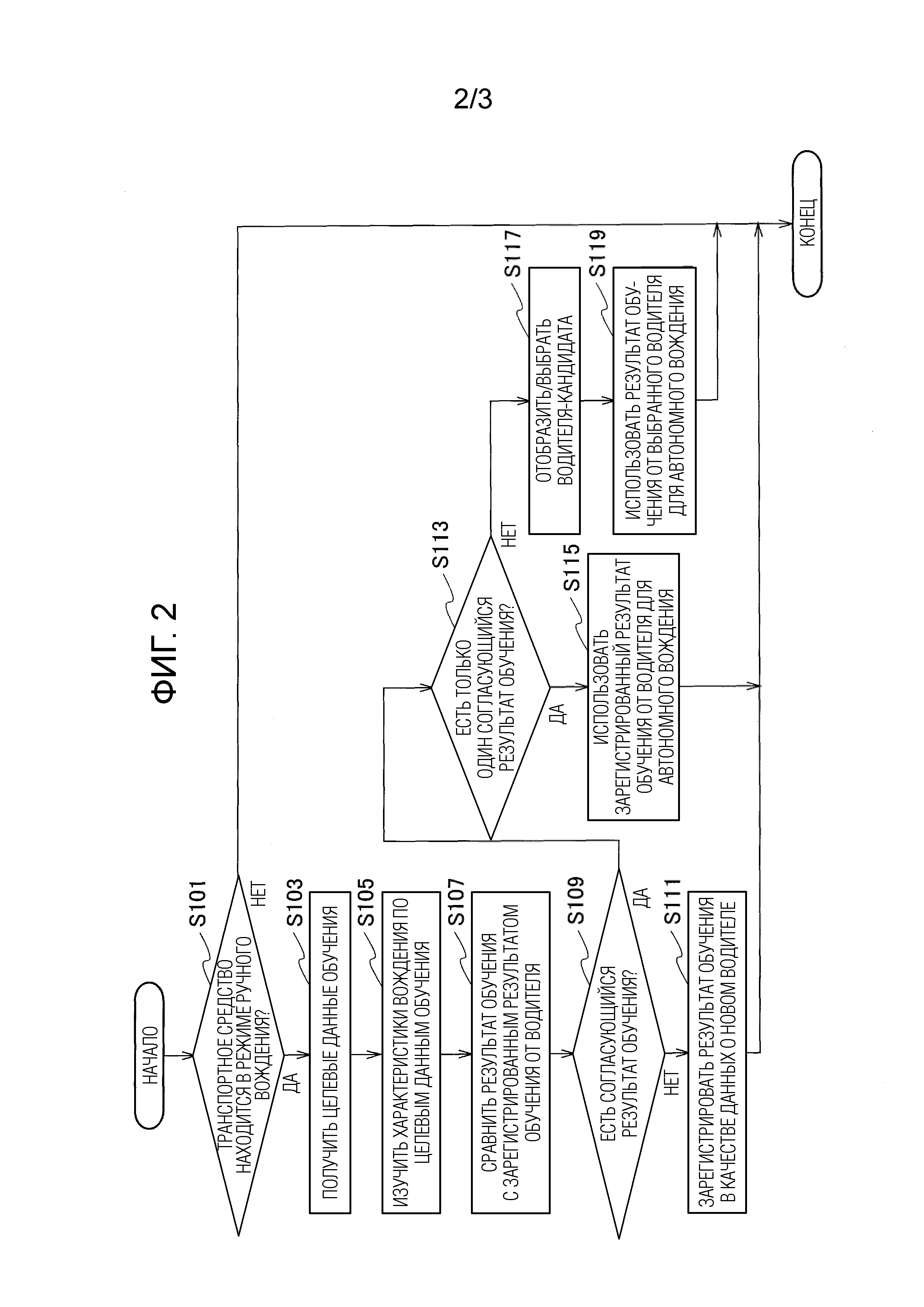
Фиг. 2 представляет собой блок–схему последовательности операций, иллюстрирующую процедуру процесса изучения характеристик вождения устройством помощи при движении в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 3 представляет собой схематическую диаграмму, иллюстрирующую сравнение между незарегистрированным результатом обучения и зарегистрированным результатом обучения в устройстве помощи при движении в соответствии с вариантом осуществления настоящего изобретения.
Описание вариантов осуществления
[0009] Варианты осуществления настоящего изобретения описаны ниже со ссылкой на прилагаемые чертежи.
[Конфигурация системы управления вождением]
[0010] На фиг.1 показана блок–схема, иллюстрирующая конфигурацию системы 100 управления вождением, включающей в себя устройство 11 помощи при движении в соответствии с настоящим вариантом осуществления. Как показано на фиг.1, система 100 управления вождением в соответствии с настоящим вариантом осуществления включает в себя устройство 11 помощи при движении, блок 21 обнаружения состояния движения, блок 22 обнаружения состояния окружения, переключатель 23 режима вождения, блок 61 представления состояния управления и привод 31.
[0011] Устройство 11 помощи при движении представляет собой контроллер, который изучает характеристики вождения (обучается характеристикам вождения) на основе заданных целевых данных обучения, элементов данных о движении, полученных в ходе ручного вождения водителем, в транспортном средстве, способном на переключение между ручным вождением водителем и автономным вождением, и выполняет обработку для применения результата обучения к управлению движением при автономном вождении.
[0012] Кроме того, в настоящем варианте осуществления описан случай, когда устройство 11 помощи при движении смонтировано на транспортном средстве. Однако в транспортном средстве может быть установлено устройство связи, и часть устройства 11 помощи при движении может быть установлена на внешнем сервере, так что внешний сервер выполняет обработку для изучения характеристик вождения водителей. Когда устройство 11 помощи при движении смонтировано на транспортном средстве, могут быть изучены характеристики вождения водителя, который владеет транспортным средством или использует транспортное средство. Элементы целевых данных обучения в течение заданного периода (например, последнего одного месяца) могут быть сохранены с тем, чтобы быть отраженными при автономном вождении транспортного средства, которым владеет или которое использует водитель. С другой стороны, когда устройство 11 помощи при движении установлено на внешнем сервере, поскольку обучение может выполняться с использованием целевых данных обучения самого водителя в течение длительного периода времени, может быть рассчитан более стабильный результат обучения. Кроме того, когда обучение еще не завершено, используя элементы целевых данных обучения других водителей, при автономном вождении могут отражаться характеристики вождения среднего водителя в этой зоне.
[0013] Блок 21 обнаружения состояния движения обнаруживает данные о движении, указывающие состояние движения транспортного средства, такие как скорость транспортного средства и угол поворота руля, темп ускорения, разделяющее транспортные средства расстояние от предыдущего транспортного средства, относительная скорость относительно предыдущего транспортного средства, текущее положение, состояние отображения указателя поворота, состояние свечения фары и состояние работы стеклоочистителей. Например, в качестве блока 21 обнаружения состояния движения приведены датчик, предусмотренный в педали тормоза или педали акселератора, датчик, который получает данные о поведении транспортного средства, такой как датчик колеса и датчик скорости рыскания, лазерный радар, камера, бортовая сеть, такая как CAN (местная контроллерная сеть), которая передает данные, полученные от ее датчиков, и навигационное устройство.
[0014] Блок 22 обнаружения состояния окружения обнаруживает информацию об окружающей среде, представляющую среду, в которой движется транспортное средство, такую как количество полос движения, ограничение скорости, уклон дороги и кривизна дороги, по которой движется транспортное средство, состояние отображения светофора перед транспортным средством, расстояние до перекрестка перед транспортным средством, количество транспортных средств, которые движутся перед транспортным средством, ожидаемый курс на перекрестке перед транспортным средством и наличие регулирования временной остановки. Например, в состав блока 22 обнаружения состояния окружения входят камера, лазерный радар и навигационное устройство, установленные на транспортном средстве. Состояние отображения светофора перед транспортным средством и наличие регулирования временной остановки могут быть обнаружены с помощью связи транспортных средств с дорогой (от англ. «road-to-vehicle communication»). Количество транспортных средств, которые движутся перед транспортным средством, может быть обнаружено с помощью облачной службы, взаимодействующей со связью между транспортными средствами (от англ. «vehicle-to-vehicle communication») и смартфоном. Ожидаемый курс на перекрестке перед транспортным средством получают из навигационного устройства, состояния отображения указателя поворота или т.п. Кроме того, освещенность, температуру и погодные условия вокруг транспортного средства получают соответственно от датчика освещенности, датчика наружной температуры и переключателя стеклоочистителей. Однако освещенность можно получить от переключателя фар.
[0015] Переключатель 23 режима вождения представляет собой установленный на транспортном средстве переключатель для переключения между автономным вождением и ручным вождением, который приводится в действие находящимся в транспортном средстве лицом. Например, это переключатель, установленный в рулевом управлении транспортного средства.
[0016] Блок 61 представления состояния управления отображает, является ли текущее состояние управления ручным вождением или автономным вождением на блоке отображения измерителя, экране дисплея навигационного устройства, индикаторе на лобовом стекле и т.п. Кроме того, блок 61 представления состояния управления выводит звуковое уведомление, информирующее о начале и конце автономного вождения, и представляет, завершено ли изучение характеристик вождения.
[0017] Привод 31 принимает команду на выполнение от устройства 11 помощи при движении, чтобы приводить в действие соответствующие узлы, такие как акселератор, тормоз и рулевое управление транспортного средства.
[0018] Далее описываются соответствующие блоки, составляющие устройство 11 помощи при движении. Устройство 11 помощи при движении включает в себя блок 41 хранения целевых данных обучения, блок 42 изучения характеристик вождения, блок 43 идентификации водителя и блок 45 выполнения управления автономным вождением.
[0019] Блок 41 хранения целевых данных обучения получает данные о движении, относящиеся к состоянию движения транспортного средства, и элементы информации об окружающей среде, относящиеся к среде движения вокруг транспортного средства, от блока 21 обнаружения состояния движения, блока 22 обнаружения состояния окружения и переключателя 23 режима вождения и хранит в себе заданные целевые данные обучения, требуемые для изучения характеристик вождения водителя, в сочетании со сценами движения, такими как состояние движения и среда движения транспортного средства.
[0020] Блок 41 хранения целевых данных обучения хранит в себе заданные целевые данные обучения, необходимые для изучения характеристик вождения водителя для каждого из водителей. То есть блок 41 хранения целевых данных обучения ассоциирует целевые данные обучения с водителями, классифицирует целевые данные обучения для каждого водителя и хранит в себе целевые данные обучения.
[0021] Идентификация водителя, ассоциированного с целевыми данными обучения, выполняется описанным ниже блоком 43 идентификации водителя. Новые целевые данные обучения, вводимые в блок 41 хранения целевых данных обучения из блока 21 обнаружения состояния движения, блока 22 обнаружения состояния окружения и переключателя 23 режима вождения, временно хранятся в блоке 41 хранения целевых данных обучения как незарегистрированные целевые данные обучения, в течение некоторого периода времени, пока блоком 43 идентификации водителя не будет выполнена идентификация водителя, ассоциированного с целевыми данными обучения. Кроме того, после того, как идентификация водителя, ассоциированного с целевыми данными обучения, выполнена блоком 43 идентификации водителя, эти целевые данные обучения регистрируются в блоке 41 хранения целевых данных обучения в качестве целевых данных обучения, соответствующих водителю, идентифицированному блоком 43 идентификации водителя. В результате целевые данные обучения становятся целевыми данными обучения, зарегистрированными в блоке 41 хранения целевых данных обучения. Достаточно того, что временем идентификации водителя является время, за которое может быть идентифицирован водитель, например момент времени после вождения на протяжении 3 километров, момент времени после вождения в течение 10 минут и момент времени после получения заданного количества данных (момент времени после получения заданного количества данных, таких как 100 графиков или 1 килобайт).
[0022] Блок 41 хранения целевых данных обучения может хранить в себе время замедления в ходе ручного вождения водителем. Блок 41 хранения целевых данных обучения может хранить в себе время замедления в случае остановки в положении остановки, таком как предусмотренная на перекрестке линия остановки или тому подобное, время замедления в случае остановки позади останавливающегося предыдущего транспортного средства или время замедления в случае движения вслед за предыдущим транспортным средством. Кроме того, блок 41 хранения целевых данных обучения может хранить в себе поведение транспортного средства во время приведения в действие тормоза, такое как рабочее положение тормоза, которое является положением, в котором тормоз приводится в действие по отношению к положению остановки, расстояние по отношению к положению остановки, скорость транспортного средства во время срабатывания тормоза и темп ускорения.
[0023] «Время замедления» включает в себя момент времени, когда водитель приводит в действие тормоз (педаль тормоза), и тормоз приводится в действие во время остановки транспортного средства в положении остановки, момент времени, когда на транспортном средстве активируется замедление, момент времени, когда заканчивается работа акселератора, или момент времени, когда начинается работа педали тормоза. Альтернативно, «время замедления» может включать в себя момент времени, когда величина срабатывания педали тормоза (величина нажатия) водителем становится равной или превышающей заданную величину, установленную заранее, или момент времени, когда величина срабатывания педали акселератора (величина нажатия) водителем становится равной или меньшей заданной величины, установленной заранее. В качестве альтернативы, «время замедления» может включать в себя момент времени, когда водитель приводит в действие тормоз, и величина управления во время работы тормоза достигла определенного значения, установленного заранее, или момент времени, когда скорость увеличения величины управления во время срабатывания тормоза достигла определенного значения.
[0024] То есть момент времени, когда величина управления тормоза или скорость увеличения величины управления достигла определенного значения, хотя и не достигнуто заданное замедление в результате операции торможения, может быть задан как «время замедления». То есть «время замедления» представляет собой понятие, включающее в себя момент времени, когда задействуется тормоз (время запуска тормоза), момент времени выключения акселератора (время запуска тормоза), момент времени, когда величина управления тормоза достигла определенного значения, и момент времени, когда скорость увеличения величины управления тормоза достигла определенного значения. Другими словами, это время, когда водитель ощущает операцию торможения.
[0025] Тормоз в настоящем варианте осуществления включает в себя гидравлический тормоз, тормоз с электронным управлением и рекуперативный тормоз. Он также может включать в себя состояние активации замедления, даже если гидравлический тормоз, тормоз с электронным управлением или рекуперативный тормоз не работают.
[0026] Кроме того, блок 41 хранения целевых данных обучения может хранить в себе разделяющее транспортные средства расстояние между транспортным средством и предыдущим транспортным средством в ходе ручного вождения водителем. Блок 41 хранения целевых данных обучения может хранить в себе отличные от разделяющего транспортные средства расстояния элементы данных, такие как разделяющее транспортные средства расстояние во время остановки, относительная скорость по отношению к предыдущему транспортному средству, угол поворота руля, темп замедления и продолжительность времени следования за предыдущим транспортным средством.
[0027] Кроме того, блок 41 хранения целевых данных обучения может хранить в себе начальную скорость замедления, когда транспортное средство останавливается на перекрестке, тормозной путь, когда транспортное средство останавливается на перекрестке, и т.п. Кроме того, блок 41 хранения целевых данных обучения может хранить в себе элементы данных, такие как величина работы педали тормоза и педали акселератора транспортного средства, скорость транспортного средства и темп замедления, а также расстояние до линии остановки на перекрестке, во время операции замедления.
[0028] Блок 41 хранения целевых данных обучения может хранить в себе информацию об окружающей среде, в которой помещено транспортное средство, помимо этих элементов информации. В качестве информации об окружающей среде можно упомянуть число полос движения, кривизну дороги, ограничение скорости, уклон дороги и наличие регулирования временной остановки на той дороги, по которой движется транспортное средство, состояние отображения светофора, расстояние от транспортного средства до перекрестка, количество транспортных средств, которые движутся перед транспортным средством, состояние отображения указателя поворота, погода, температура или освещенность вокруг транспортного средства, и т.п.
[0029] Блок 42 изучения характеристик вождения считывает целевые данные обучения, сохраненные в блоке 41 хранения целевых данных обучения, и изучает характеристики вождения водителя, соответствующие целевым данным обучения, принимая во внимание состояние движения и степень влияния среды движения. Блок 42 изучения характеристик вождения изучает характеристики вождения (обучается им) для каждых из целевых данных обучения на основании целевых данных обучения (незарегистрированных целевых данных обучения и зарегистрированных целевых данных обучения), хранящихся в блоке 41 хранения целевых данных обучения. Блок 42 изучения характеристик вождения ассоциирует рассчитанные таким образом результаты обучения с водителями, классифицирует результаты обучения для каждого водителя и хранит в себе результаты обучения.
[0030] Идентификация водителя, ассоциированного с результатом обучения, выполняется описанным ниже блоком 43 идентификации водителя. Результат обучения, вновь рассчитанный блоком 42 изучения характеристик вождения, временно хранится в блоке 42 изучения характеристик вождения как незарегистрированный результат обучения, в течение некоторого периода времени до тех пор, пока блок 43 идентификации водителя не идентифицирует водителя, ассоциируемого с результатом обучения. Кроме того, после того как блок 43 идентификации водителя идентифицировал водителя, ассоциируемого с результатом обучения, этот результат обучения регистрируется в блоке 42 изучения характеристик вождения как результат обучения, соответствующий водителю, идентифицированному блоком 43 идентификации водителя. В результате, результат обучения становится результатом обучения, зарегистрированным в блоке 42 изучения характеристик вождения.
[0031] Обучение, выполняемое блоком 42 изучения характеристик вождения, может выполняться в режиме реального времени одновременно с хранением целевых данных обучения в блоке 41 хранения целевых данных обучения. В качестве альтернативы, обучение, выполняемое блоком 42 изучения характеристик вождения, может выполняться каждое заданное время или в момент времени, когда в блоке 41 хранения целевых данных обучения было накоплено определенное количество целевых данных обучения.
[0032] Блок 43 идентификации водителя идентифицирует водителя на основе незарегистрированного результата обучения, временно хранящегося в блоке 41 хранения целевых данных обучения. В частности, блок 43 идентификации водителя сравнивает незарегистрированный результат обучения, сохраненный в блоке 41 хранения целевых данных обучения, с зарегистрированным результатом обучения.
[0033] В результате сравнения блоком 43 идентификации водителя, когда был найден зарегистрированный результат обучения, имеющий характеристики вождения с отличием от характеристик вождения в незарегистрированном результате обучения, находящимся в пределах заданного значения, блок 43 идентификации водителя идентифицирует, что водитель, соответствующий незарегистрированному результату обучения, является тем же лицом (человеком), что и водитель в зарегистрированном результате обучения.
[0034] В результате сравнения блоком 43 идентификации водителя, когда не был найден зарегистрированный результат обучения, имеющий характеристики вождения с отличием от характеристик вождения в незарегистрированном результате обучения, находящимся в пределах заданного значения, блок 43 идентификации водителя идентифицирует, что водитель, соответствующий незарегистрированному результату обучения, является новым водителем (водителем, который не соответствует ни одному уже зарегистрированному водителю).
[0035] Когда результат обучения от нового водителя следует зарегистрировать в блоке 42 изучения характеристик вождения, у находящегося в транспортном средстве лица может быть запрошено подтверждение в отношении регистрации водителя. Этот запрос может быть сделан с помощью имеющегося в транспортном средстве дисплея или с помощью динамика. После того, как сделан запрос находящемуся в транспортном средстве лицу, выбор находящегося в транспортном средстве лица может быть получен посредством ввода касанием на дисплее или путем распознавания голоса находящегося в транспортном средстве лица с помощью микрофона.
[0036] Когда результат обучения от нового водителя следует зарегистрировать в блоке 42 изучения характеристик вождения, находящееся в транспортном средстве лицо может быть запрошено ввести информацию, идентифицирующую водителя. Этот запрос может быть сделан с помощью имеющегося в транспортном средстве дисплея или с помощью динамика. После того, как запрос сделан находящемуся в транспортном средстве лицу, выбор находящегося в транспортном средстве лица может быть получен посредством ввода касанием на дисплее или путем распознавания голоса находящегося в транспортном средстве лица с помощью микрофона.
[0037] В результате сравнения блоком 43 идентификации водителя, когда было найдено множество зарегистрированных результатов обучения, имеющих характеристики вождения с отличием от характеристик вождения в незарегистрированном результате обучения, находящимся в пределах заданного значения, блок 43 идентификации водителя запрашивает находящееся в транспортном средстве лицо выбрать любого из водителей, соответствующих найденным результатам обучения. Этот запрос может быть сделан с помощью имеющегося в транспортном средстве дисплея или с помощью динамика. После того, как запрос сделан находящемуся в транспортном средстве лицу, выбор находящегося в транспортном средстве лица может быть получен посредством ввода касанием на дисплее или путем распознавания голоса находящегося в транспортном средстве лица с помощью микрофона.
[0038] Блок 45 выполнения управления автономным вождением выполняет управление автономным вождением, когда транспортное средство движется на участке автономного вождения или когда водитель выбирает автономное вождение с помощью переключателя 23 режима вождения. В это время блок 45 выполнения управления автономным вождением применяет результат обучения, полученный блоком 42 изучения характеристик вождения, к управлению движением при автономном вождении.
[0039] Устройство 11 помощи при движении образовано электронной схемой общего назначения, включающей в себя микрокомпьютер, микропроцессор и центральный процессор (ЦП), а также периферийные устройства, такие как память. Устройство 11 помощи при движении действует в качестве блока 41 хранения целевых данных обучения, блока 42 изучения характеристик вождения, блока 43 идентификации водителя и блока 45 выполнения управления автономным вождением, которые описаны выше, исполняя специальные программы. Соответствующие функции устройства 11 помощи при движении могут быть реализованы одной или множеством цепей обработки. Цепь обработки включает в себя запрограммированное устройство обработки, такое как устройство обработки, включающее в себя, например, электрическую цепь, а также включает в себя специализированную интегральную схему (ASIC), выполненную с возможностью выполнения функций, описанных в этом варианте осуществления, и устройство, такое как традиционные схемные компоненты.
[Процедура обработки для изучения характеристик вождения]
[0040] Далее процедура обработки для изучения характеристик вождения устройством 11 помощи при движении в соответствии с настоящим вариантом осуществления описана со ссылкой на блок–схему последовательности операций на фиг. 2. Обработка для изучения характеристик вождения, проиллюстрированная на фиг.2, начинается, когда включено зажигание транспортного средства.
[0041] Как показано на фиг.2, сначала на этапе S101 устройство 11 помощи при движении определяет, находится ли транспортное средство в режиме ручного вождения, в соответствии с состоянием переключателя 23 режима вождения. Когда транспортное средство находится в режиме ручного вождения, процесс переходит к этапу S103, а когда транспортное средство находится в режиме автономного вождения, устройство 11 помощи при движении заканчивает обработку для изучения характеристик вождения и выполняет управление автономным вождением.
[0042] На этапе S103 блок 41 хранения целевых данных обучения обнаруживает данные о движении, относящиеся к состоянию движения транспортного средства, и информацию об окружающей среде, относящуюся к среде движения вокруг транспортного средства, от блока 21 обнаружения состояния движения, блока 22 обнаружения состояния окружения и переключателя 23 режима вождения. В качестве обнаруживаемых данных о движении обнаруживают скорость транспортного средства, угол поворота руля, темп ускорения, темп замедления, разделяющее транспортные средства расстояние от предыдущего транспортного средства, относительную скорость относительно предыдущего транспортного средства, текущее положение, ожидаемый курс на перекрестке перед транспортным средством, величины срабатывания педали тормоза и педали акселератора, продолжительности времени следования за предыдущим транспортным средством, состояние свечения фары, состояние работы стеклоочистителей и тому подобное. Кроме того, блок 41 хранения целевых данных обучения обнаруживает в качестве информации об окружающей среде число полос движения, кривизну дороги, ограничение скорости, уклон дороги и наличие регулирования временной остановки на той дороге, по которой движется транспортное средство, состояние отображения светофора, расстояние от транспортного средства до перекрестка, количество транспортных средств, движущихся перед транспортным средством, состояние отображения указателя поворота, а также погоду, температуру или освещенность вокруг транспортного средства. Новые целевые данные обучения, состоящие из данных о движении и информации об окружающей среде, временно сохраняются в блоке 41 хранения целевых данных обучения в качестве незарегистрированных целевых данных обучения.
[0043] Затем, на этапе S105, блок 42 изучения характеристик вождения изучает характеристики вождения водителя, соответствующие целевым данным обучения, принимая во внимание состояние движения и степень влияния среды движения, на основе целевых данных обучения, сохраненных в блоке 41 хранения целевых данных обучения. Результат обучения, полученный на основе незарегистрированных целевых данных обучения, временно сохраняется в блоке 42 изучения характеристик вождения в качестве незарегистрированного результата обучения.
[0044] При этом блок 42 изучения характеристик вождения создает регрессионную модель (модель множественной регрессии) для получения уравнения, количественно представляющего соотношение между двумя или более видами данных, включенными в целевые данные обучения, и выполняет обучение, выполняя регрессионный анализ (множественный регрессионный анализ, или анализ множественной регрессии).
[0045] В качестве конкретного примера рассматривается случай, когда в качестве целевых данных обучения получают данные о скорости V транспортного средства и разделяющем транспортные средства расстоянии D во время операции замедления. Предполагается, что в качестве набора двух видов данных о скорости V транспортного средства и разделяющем транспортные средства расстоянии D были получены N результатов измерений (V1, D1), (V2, D2), ..., (VN, DN). В последующих описаниях результат i–го измерения обозначен как (Vi, Di) (где i=1, 2, ..., N).
[0046] Предполагается, что установлена линейная модель, представленная следующим уравнением (1), в предположении, что β1 и β2 являются коэффициентами регрессии,разделяющее транспортные средства расстояние D является объясняющей переменной (независимой переменной), скорость V транспортного средства является объективной переменной (зависимой переменной, объясняемой переменной, оптимизируемой переменной).
[0047] V = β1+β2D ... (1)
[0048] Член ошибки εi определяетсяследующим уравнением (2), предполагая, что ошибка из-за регрессионной модели в i–м результате измерения равна εi.
[0049] εi=Vi–(β1+β2Di)(где i=1, 2, ..., N) ... (2)
[0050] В уравнении (2) с использованием метода наименьших квадратов, в котором сумма S квадратов (где S=Ʃεi2, i=1, 2, ...,N) члена ошибки εi доводят до минимума, используя β1и β2 в качестве параметров, можнооценить уравнение,количественно представляющее соотношение между N результатами измерений, относящимися к набору двух видов данных о скорости V транспортного средства и разделяющем транспортные средства расстоянии D. Параметры β1 и β2 при минимизации суммы S квадратов члена ошибки εi являютсяоценочными величинамикоэффициентов регрессии β1 и β2, появляющимися в уравнении (1), иназываются оценками наименьших квадратов L1 и L2. Решая оценки L1 иL2 наименьшихквадратов, можно оценить количественное соотношение между скоростью V транспортного средства и разделяющим транспортные средства расстоянием D.
[0051] Остаток регрессии Ei определяется согласно следующему уравнению (3) на основе оценок L1 и L2 наименьших квадратов.
[0052] Ei=Vi–(L1+L2Di) (где i=1, 2, ..., N) ... (3)
[0053] В целевых данных обучения, подлежащих регрессионному анализу, когда число N результатов измерений достаточно велико, считается, что остаток регрессии Ei следует нормальному распределению (среднее значение 0, стандартное отклонение σE). Таким образом, оценивают стандартное отклонение остатка регрессии Ei. В последующих описаниях оценкастандартного отклонения σE остатка регрессии Ei обозначена как стандартная ошибка sE. Стандартная ошибка sE определяется следующим уравнением (4).
[0054] sE={(ƩEi2)/(N–2)}1/2 ... (4)
[0055] Здесь причина, по которой сумма квадратов (ƩEi2) остатка регрессии Ei делится на (N–2) в определении стандартной ошибки sE, связана с тем фактом, что существуют две оценки наименьших квадратов. Чтобы сохранить инвариантность стандартной ошибки sE, сумма квадратов (ƩEi2) делится на (N–2).
[0056] Оценки L1 и L2 наименьших квадратов являются линейными функциями остатка регрессии Ei, который считается следующим нормальному распределению, и, таким образом, считается, что оценка L1 наименьших квадратов следует нормальному распределению (среднее значение β1, стандартное отклонение σL1), и оценка L2наименьших квадратов следует нормальному распределению (среднее значение β2, стандартное отклонение σL2). Следовательно, стандартные отклонения σL1 и σL2 оценок L1 и L2 наименьших квадратов могутбыть оценены на основе уравнения(3) истандартной ошибки sE. В нижеследующих описаниях оценка стандартного отклонения σL1 оценки L1 наименьших квадратов обозначена как стандартная ошибка sL1, а оценка стандартного отклонения σL2 оценки L2 наименьших квадратов обозначена как стандартная ошибка sL2.
[0057] Блок 42 изучения характеристик вождения выполняет изучение характеристик вождения на основе целевых данных обучения, оценивая оценки наименьших квадратов [L1, L2] и стандартные ошибки [sL1, sL2], как описано выше. Блок 42 изучения характеристик вождения хранит в себе полученные оценки наименьших квадратов [L1, L2] и стандартные ошибки [sL1, sL2] в качестве характеристик вождения, относящихся к результату обучения, полученному из целевых данных обучения.
[0058] Блок 42 изучения характеристик вождения также может хранить в себе число N элементов данных, включенных в целевые данные обучения, которые были использованы для обучения. Блок 42 изучения характеристик вождения может дополнительно хранить в себе частоту движения в той зоне, где движется транспортное средство, соответствующее целевым данным обучения, которые были использованы для обучения.
[0059] В вышеприведенных описаниях в качестве примера упомянута модель регрессии между скоростью V транспортного средства и разделяющим транспортные средства расстоянием D. Однако аналогичный регрессионный анализ (множественный регрессионный анализ) может быть выполнен с использованием не только скорости V транспортного средства и разделяющего транспортные средства расстояния D, но и других двух или более элементов данных. В вышеприведенных описаниях, поскольку регрессионный анализ выполняется между двумя элементами данных, в качестве оценки наименьших квадратов получают два значения L1 и L2. В общем, когда выполняется регрессионный анализ между M элементами данных, в качестве оценки наименьших квадратов получают M значений [L1, L2, ..., LM]. Аналогично, в качестве стандартной ошибки, соответствующей оценке наименьших квадратов, получают M значений [sL1, sL2, ..., sLM].
[0060] Кроме того, в вышеприведенных описаниях в качестве модели регрессии упомянута линейная модель (линейная регрессия), которая предполагает линейную зависимость между элементами данных. Однако, кроме линейной модели, описанный выше метод линейной модели может использоваться при условии, что она представляет собой модель, которая может быть преобразована в линейную модель путем функционального преобразования или тому подобного. Например, может использоваться эластичная модель, в которой объясняемая переменная пропорциональна степени объясняющей переменной, или эластичная модель (экспоненциальная регрессия), в которой объясняемая переменная пропорциональна экспоненциальной функции объясняющей переменной. В качестве альтернативы, можно использовать линейную модель, эластичную модель или комбинацию эластичных моделей.
[0061] В вышеприведенных описаниях считается, что, когда число N результатов измерений достаточно велико, остаток регрессии Ei следует нормальному распределению. В общем, однако, остаток регрессии Ei не всегда следует нормальному распределению. Например, когда число N результатов измерений мало (например, N меньше 30), изучение характеристик вождения может быть выполнено в предположении иного распределения, отличного от нормального распределения, согласующегося со свойством данных. Например, изучение характеристик вождения может выполняться в предположении биноминального распределения, распределения Пуассона или равномерного распределения, отличного от нормального распределения. Изучение характеристик вождения может быть выполнено путем выполнения непараметрической оценки.
[0062] Изучение характеристик вождения может быть выполнено путем вычисления выходной ошибки во время ввода обучающих данных в нейронную сеть и выполнения регулировки различных параметров нейронной сети так, чтобы ошибка стала минимальной, как при глубоком обучении (иерархическом обучении, машинном обучении) с использованием нейронной сети, кроме методов, описанных выше.
[0063] В вышеприведенных описаниях предполагается выполнение обучения с использованием всех результатов измерений, включенных в целевые данные обучения, однако могут выполняться выбор или взвешивание результатов измерений, подлежащих использованию для обучения, в соответствии с той зоной движения, где движется транспортное средство. Например, решение об элементах информации о частоте маршрута и тех местах (место отправления, местоположение в пути и пункт назначения), где транспортное средство движется, принимается на основании одного или множества элементов целевых данных обучения, и когда результат измерения, включенный в изучаемые целевые данные обучения, был измерен в зоне, имеющей высокую частоту движения, вклад такого результата измерения в сумму S квадратов члена ошибки εi, используемую в регрессионном анализе, может быть задан высоким.
[0064] В частности, сумма S квадратов члена ошибки εi может бытьопределена как весовой параметр Wi согласно следующему уравнению (5). При этом, когда должен быть осуществлен выбор результатов измерения, подлежащих использованию для обучения, весовой параметр Wi принимает значение 1 в отношении результата измерения, подлежащего использованию для обучения, и весовой параметр Wi принимает значение 0 в отношении результата измерения, не подлежащего использованию для обучения. Когда необходимо выполнить взвешивание результатов измерения, подлежащих использованию для обучения, весовой параметр Wi принимает большее значение по мере того, как становится выше частота движения в зоне, соответствующей этому результату измерения.
[0065] S=Ʃ(Wi∙εi2) ... (5)
[0066] Выполняя выбор или взвешивание подлежащих использованию для обучения результатов измерений в соответствии с той зоной движения, где движется транспортное средство, по мере того как частота движения в той зоне, где движется транспортное средство, становится выше, характеристики вождения при ручном вождении водителем в этой зоне могут быть изучены с более высокой степенью приоритета. Поскольку частота движения в той зоне, где движется транспортное средство, становится выше, считается, что водитель привык к вождению в этой зоне, и считается, что характеристики вождения водителя сильно проявляются в целевых данных обучения.
[0067] В вышеприведенных описаниях характеристики вождения и стандартная ошибка оцениваются по целевым данным обучения с помощью регрессионного анализа. Однако среднее значение и стандартное отклонение времени замедления могут быть оценены соответственно как характеристики вождения и стандартная ошибка на основе частотного распределения, относящегося ко времени замедления (время замедления отложено по горизонтальной оси, а частота – по вертикальной оси), полученного из результатов измерений. Помимо этой оценки, среднее значение и стандартное отклонение разделяющего транспортные средства расстояния могут быть оценены соответственно как характеристики вождения и стандартная ошибка на основе частотного распределения, относящегося к разделяющему транспортные средства расстоянию между транспортным средством и предыдущим транспортным средством (разделяющее транспортные средства расстояние отложено по горизонтальной оси, а частота – по вертикальной оси), полученного из результатов измерений. Кроме того, среднее значение и стандартное отклонение скорости транспортного средства во время операции замедления могут быть оценены как характеристики вождения и стандартная ошибка на основе частотного распределения (скорость транспортного средства отложена горизонтальной оси, а частота – по вертикальной оси), полученного из результатов измерений.
[0068] Затем, на этапе S107, блок 43 идентификации водителя идентифицирует водителя на основании незарегистрированного результата обучения, временно сохраненного в блоке 41 хранения целевых данных обучения. В частности, блок 43 идентификации водителя сравнивает незарегистрированный результат обучения с зарегистрированными результатами обучения, хранящимися в блоке 41 хранения целевых данных обучения.
[0069] Как показано на фиг. 3, предполагается, что получен незарегистрированный результат обучения (в виде характеристик вождения, оценки LU наименьших квадратов и стандартной ошибки sU), а результат обучения от водителя A (в виде характеристик вождения, оценки LA наименьших квадратов и стандартной ошибки sA), результат обучения от водителя B (в виде характеристик вождения, оценки LB наименьших квадратов и стандартной ошибки sB) и результат обучения от водителя C (в виде характеристик вождения, оценки LC наименьших квадратов и стандартной ошибки sC) были уже зарегистрированы в качестве зарегистрированных результатов обучения.
[0070] Блок 43 идентификации водителя сравнивает результаты обучения друг с другом путем проведения t–теста (проверки по критерию Стьюдента) для характеристик вождения.
[0071] Когда незарегистрированный результат обучения следует сравнивать с результатом обучения от водителя А, блок 43 идентификации водителя обозначает нулевую гипотезу как «LU=LA» и альтернативную гипотезу как «LU≠LA» и определяет двухвыборочный t–критерий, определяемый следующим уравнением (6).
[0072] TUA={LU–LA}/{sU2+sA2}1/2 ... (6)
[0073] Когда оценка LU наименьших квадратов и оценка LA наименьших квадратов следуют нормальному распределению, двухвыборочный t–критерий TUA (критерий Стьюдента на двойной выборке) между незарегистрированным результатом обучения и результатом обучения от водителя A следует t–распределению (распределению Стьюдента). Такое t–распределение имеет степень свободы в зависимости от целевых данных обучения, соответствующих незарегистрированному результату обучения, целевых данных обучения, соответствующих результату обучения от водителя A, и т.п.
[0074] Блок 43 идентификации водителя рассчитывает двухвыборочный t–критерий TUA и проводит проверку с уровнем значимости α=0,05. То есть уровень, рассматриваемый как имеющий значительное различие, установлен на 5%.
[0075] Уровень значимости α может быть изменен в зависимости от количества результатов измерений, включенных в целевые данные обучения.
[0076] Аналогично, блок 43 идентификации водителя вычисляет двухвыборочный t–критерий TUB между незарегистрированным результатом обучения и результатом обучения от водителя B и вычисляет двухвыборочный t–критерий TUC между незарегистрированным результатом обучения и результатом обучения от водителя С.
[0077] Таким образом, блок 43 идентификации водителя вычисляет двухвыборочный t–критерий между незарегистрированным результатом обучения и зарегистрированным результатом обучения. Если зарегистрированный результат обучения не был сохранен в блоке 41 хранения целевых данных обучения, блок 43 идентификации водителя не выполняет сравнение между описанными выше результатами обучения.
[0078] Затем, на этапе S109, блок 43 идентификации водителя определяет, есть ли зарегистрированный результат обучения, согласующийся с незарегистрированным результатом обучения.
[0079] Блок 43 идентификации водителя отвергает нулевую гипотезу, когда вычисленный двухвыборочный t–критерий TUA становится значением, сильно отклоняющимся от 0, и, в частности, когда абсолютное значение двухвыборочного t–критерия TUA становится значением, большим, чем процентный пункт Tα/2 в t–распределении, определяемыйуровнем значимости α.
[0080] Здесь процентный пункт Tα/2 является значением двухвыборочного t–критерия, при котором верхняя вероятность в t–распределении становится равной α/2. Совокупность (область отклонения) статистических значений для отклонения нулевой гипотезы включает как положительную область, отклоненную от 0, так и отрицательную область, отклоненную от 0, и необходимо провести двусторонний тест (проверку с двух сторон). Поэтому верхняя вероятность устанавливается на значение, равное половине уровня значимости α.
[0081] Когда нулевая гипотеза «LU=LA» отклонена, блок 43 идентификации водителя определяет, что незарегистрированный результат обучения и результат обучения от водителя А не согласуются друг с другом. Кроме того, блок 43 идентификации водителя идентифицирует, что водитель, соответствующий незарегистрированному результату обучения, не является водителем А.
[0082] С другой стороны, когда нулевая гипотеза «LU=LA» принята (не отклонена), блок 43 идентификации водителя заключает, что незарегистрированный результат обучения и результат обучения от водителя А согласуются друг с другом. Кроме того, блок 43 идентификации водителя идентифицирует, что водитель, соответствующий незарегистрированному результату обучения, является водителем А.
[0083] Таким образом, блок 43 идентификации водителя сравнивает LU, представляющий характеристики вождения в незарегистрированном результате обучения, с характеристиками вождения в результате обучения от водителя A, и если различие между LU и LA равно или меньше заданного значения, блок 43 идентификации водителя идентифицирует, что водитель, соответствующий незарегистрированному результату обучения, является водителем A в зарегистрированном результате обучения.
[0084] Аналогично, блок 43 идентификации водителя определяет на основе двухвыборочного t–критерия TUB, согласуются ли друг с другом незарегистрированный результат обучения и результат обучения от водителя B, и идентифицирует, является ли водитель, соответствующий незарегистрированному результату обучения, водителем B. Кроме того, блок 43 идентификации водителя определяет на основе двухвыборочного t–критерия TUC, согласуются ли друг с другом незарегистрированный результат обучения и результат обучения от водителя C, и идентифицирует, является ли водитель, соответствующий незарегистрированному результату обучения, водителем С.
[0085] Если зарегистрированный результат обучения, согласующийся с незарегистрированным результатом обучения, не найден, или же зарегистрированный результат обучения не был сохранен в блоке 41 хранения целевых данных обучения, блок 43 идентификации водителя идентифицирует, что водитель, соответствующий незарегистрированному результату обучения, является новым водителем (водителем, не соответствующим какому-либо из зарегистрированных водителей).
[0086] Если в результате сравнения блоком 43 идентификации водителя нет зарегистрированного результата обучения, согласующегося с незарегистрированным результатом обучения (НЕТ на этапе S109), процесс переходит к этапу S111, а если есть зарегистрированный результат обучения, согласующийся с незарегистрированным результатом обучения (ДА на этапе S109), процесс переходит к этапу S113.
[0087] На этапе S111 блок 41 хранения целевых данных обучения регистрирует в себе незарегистрированные целевые данные обучения в качестве целевых данных обучения, соответствующих новому водителю. Кроме того, блок 42 изучения характеристик вождения регистрирует незарегистрированный результат обучения в качестве результата обучения, соответствующего новому водителю.
[0088] На этапе S113, если в результате сравнения блоком 43 идентификации водителя имеется только один зарегистрированный результат обучения, согласующийся с незарегистрированным результатом обучения (ДА на этапе S113), процесс переходит к этапу S115 и блок 45 выполнения управления автономным вождением применяет этот зарегистрированный результат обучения, согласующийся с незарегистрированным результатом обучения, к автономному вождению.
[0089] На этапе S113, если имеется множество зарегистрированных результатов обучения, согласующихся с незарегистрированным результатом обучения (НЕТ на этапе S113), процесс переходит к этапу S117, и блок 61 представления состояния управления отображает множество водителей-кандидатов, соответствующих согласующимся зарегистрированным результатам обучения.
[0090] На этапе S119, когда из множества водителей-кандидатов, отображаемых на блоке 61 представления состояния управления, пользователем устройства 11 помощи при движении выбран один водитель, блок 45 выполнения управления автономным вождением применяет к автономному вождению тот зарегистрированный результат обучения, согласующийся с незарегистрированным результатом обучения, который является результатом обучения от выбранного водителя.
[0091] В вышеприведенных описаниях t–тест для характеристик вождения проводится с использованием одной части характеристик вождения (одной оценки наименьших квадратов) среди характеристик вождения, включенных в результат обучения. Однако t–тест для характеристик вождения может быть проведен путем объединения двух или более частей характеристик вождения. По сравнению со случаем, когда используется только одна часть характеристик вождения, могут быть выполнены более точное сравнение между результатами обучения и идентификация водителя за счет объединения большего количества частей характеристик вождения.
[0092] На описанном выше этапе S109, когда соответствующий незарегистрированным целевым данным обучения водитель идентифицирован, результат обучения, полученный выполнением обучения с использованием как незарегистрированных целевых данных обучения, так и результата обучения, соответствующего идентифицированному водителю, может быть применен к автономному вождению, вместо применения зарегистрированного результата обучения к автономному вождению на этапе S115 и этапе S119.
[0093] То есть, на этапе S115 и этапе S119 незарегистрированные целевые данные обучения могут быть объединены с целевыми данными обучения идентифицированного водителя, и результат обучения, основанный на вновь полученных целевых данных обучения, может быть применен к автономному вождению. При выполнении этого процесса размер целевых данных обучения может быть увеличен, и к автономному вождению может применяться результат обучения, на котором сильно отражаются характеристики вождения идентифицированного водителя.
[0094] Когда число N результатов измерений, включенных в целевые данные обучения, соответствующие незарегистрированному результату обучения, мало (например, N меньше 30), может быть решено распределение, согласованное с целевыми данными обучения, для вычисления суммы теста, соответствующей этому распределению, вместо вычисления двухвыборочного t–критерия, который предполагает следование t–распределению. Альтернативно, может быть выполнена непараметрическая оценка на основе целевых данных обучения, чтобы выполнить сравнение между результатами обучения.
[0095] Помимо методов, описанных выше, сравнение между собой результатов обучения может быть выполнено методом глубокого обучения (иерархического обучения, машинного обучения) с использованием нейронной сети.
[0096] Для сравнения результатов обучения могут быть упомянуты различные методы, как описано выше. В качестве метода сравнения результатов обучения в настоящем изобретении может использоваться такой метод, который может отклонить или принять нулевую гипотезу о том, что «результаты обучения согласуются друг с другом», путем вычисления заданной вероятности на основе двух или более сравниваемых результатов обучения и сравнения этой вероятности с уровнем значимости.
[Эффекты вариантов осуществления]
[0097] Как подробно описано выше, в способе помощи при движении в соответствии с настоящим вариантом осуществления в транспортном средстве, способном на переключение ручного вождения водителем и автономного вождения, идентифицируют водителя с использованием характеристик вождения в ходе ручного вождения водителем и выполняют управление движением на основе результата обучения, соответствующего идентифицированному водителю. Соответственно, водитель может быть идентифицирован без необходимости в использовании датчика или избыточных операций для идентификации водителя, и может быть оказана соответствующая помощь при движении, подходящая для этого водителя.
[0098] В частности, поскольку водитель может быть идентифицирован на основании характеристик вождения в ходе ручного вождения, вместо использования датчика для идентификации водителя, такого как датчик для выполнения распознавания лиц или распознавания отпечатков пальцев, может быть достигнуто снижение стоимости по сравнению с продуктом, в котором установлен датчик для идентификации водителя. Например, себестоимость производства может быть уменьшена на стоимость в примерно 5000 иен датчика аутентификации по отпечаткам пальцев на основе серийно выпускаемых продуктов.
[0099] Кроме того, способ помощи при движении согласно настоящему варианту осуществления может быть таким, что сравнивают друг с другом характеристики вождения в ходе ручного вождения и результат обучения, соответствующий водителю, и когда различие между характеристиками вождения в ходе ручного вождения и характеристиками вождения в результате обучения является большим, чем заданное значение, характеристики вождения в ходе ручного вождения регистрируют как результат обучения от нового водителя. Соответственно, водитель может быть точно идентифицирован на основании его уникальных характеристик вождения. Кроме того, незарегистрированный новый водитель может быть автоматически зарегистрирован без необходимости в каких–либо специальных операциях со стороны водителя.
[0100] Кроме того, способ помощи при движении в соответствии с настоящим вариантом осуществления может запрашивать находящееся в транспортном средстве лицо предоставить подтверждение регистрации, когда результат обучения от нового водителя следует зарегистрировать. Соответственно, можно избежать регистрации нового водителя, который не предназначен для регистрации находящимся в транспортном средстве лицом. Следовательно, может быть реализован способ помощи при движении, отвечающий намерению находящегося в транспортном средстве лица, и может быть предотвращено то, что новый водитель зарегистрирован по ошибке.
[0101] Кроме того, способ помощи при движении в соответствии с настоящим вариантом осуществления может запрашивать находящееся в транспортном средстве лицо ввести информацию, которая идентифицирует водителя, при регистрации результата обучения от нового водителя. Соответственно, может быть задан водитель, соответствующий результату обучения. Поэтому, когда результат обучения используется после такого задания, например, когда у находящегося в транспортном средстве лица запрашивается выбор водителя, находящееся в транспортном средстве лицо может выбрать подходящий результат обучения. В качестве информации, которая идентифицирует водителя, может запрашиваться ввод атрибутов, таких как возраст и пол.
[0102] Кроме того, способ помощи при движении согласно настоящему варианту осуществления может быть таким, что характеристики вождения в ходе ручного вождения сравнивают с результатом обучения, соответствующим водителю, и когда найдено множество результатов обучения, имеющих характеристики вождения, в которых различие между характеристиками вождения в ходе ручного вождения и характеристиками вождения в результате обучения находятся в пределах заданного значения, у находящегося в транспортном средстве лица запрашивается выбор водителя из множества водителей, соответствующих найденным результатам обучения. Соответственно, пользователь может выбрать того водителя среди множества водителей, соответствующих найденным результатам обучения, на основе которого будет выполняться управление движением в режиме автономного вождения. Кроме того, можно избежать использования результата обучения, который не предназначен для использования пользователем.
[0103] Кроме того, способ помощи при движении в соответствии с настоящим вариантом осуществления по мере повышения частоты движения в той зоне, где движется транспортное средство, может более предпочтительно использовать характеристики вождения в этой зоне в качестве характеристик вождения в ходе ручного вождения во время идентификации водителя. Считается, что по мере того, как становится выше частота движения в зоне, где движется транспортное средство, водитель более привык к вождению в этой зоне, и характеристики вождения водителя сильнее отражаются в целевых данных обучения. Поэтому, предоставляя степень приоритета исходя из частоты движения в этой зоне, водитель может быть идентифицирован более точно.
[0104] Кроме того, способ помощи при движении в соответствии с настоящим вариантом осуществления может использовать время замедления в ходе ручного вождения, разделяющее транспортные средства расстояние между транспортным средством и предыдущим транспортным средством, скорость транспортного средства в ходе операции замедления или их сочетание в качестве характеристик вождения в ходе ручного вождения. Среди характеристик вождения, появляющихся в данных о движении транспортного средства, такие характеристики вождения, как время замедления в ходе ручного вождения, разделяющее транспортные средства расстояние между транспортным средством и предыдущим транспортным средством и скорость транспортного средства в ходе операции замедления, являются теми характеристиками вождения, в которых склонна проявляться личность водителя, по сравнению с другими характеристиками вождения. Следовательно, используя эти характеристики вождения, водитель может быть идентифицирован более точно.
[0105] Кроме того, способ помощи при движении согласно настоящему варианту осуществления может быть таким, что, когда нет зарегистрированного результата обучения, идентификация водителя на основе результата обучения не выполняется. Следовательно, требуемое для идентификации водителя время обработки может быть уменьшено, что позволяет достигать высокой скорости всей системы.
[0106] Кроме того, когда имеется только один зарегистрированный результат обучения, например, когда имеется только один водитель, который водит транспортное средство ежедневно, может возникнуть такой случай, что первоначально не требуется идентификация водителя. В таком случае также возможно, что идентификация водителя на основе результата обучения не выполняется. Следовательно, требуемое для идентификации водителя время обработки может быть уменьшено, что позволяет достигать высокой скорости всей системы.
[0107] Кроме того, способ помощи при движении согласно настоящему варианту осуществления может изучать характеристики вождения для каждого водителя посредством внешнего сервера, предусмотренного вне транспортного средства. Соответственно, вычислительная нагрузка в транспортном средстве может быть уменьшена.
[0108] Кроме того, даже когда водитель использует множество транспортных средств, результаты обучения от транспортных средств интегрируются и контролируются внешним сервером, а интегрированные результаты обучения распределяются с внешнего сервера на транспортное средство, которое требует управления движением при автономном вождении, так что интегрированные результаты обучения могут совместно использоваться среди транспортных средств. Соответственно, может быть оказана надлежащая помощь при движении, подходящая для водителя. Особенно полезно выполнять обработку внешним сервером в случае, когда предполагается, что водитель использует множество транспортных средств, таком как совместное пользование автомобилями (каршеринг).
[0109] Хотя содержание настоящего изобретения было описано выше со ссылкой на варианты его осуществления, настоящее изобретение не ограничивается этими описаниями, и специалистам в данной области техники будет очевидно, что могут быть проделаны различные модификации и улучшения. Не следует истолковывать, что настоящее изобретение ограничено описаниями и чертежами, которые составляют часть настоящего раскрытия. На основании настоящего раскрытия специалистам в данной области техники будут очевидны различные альтернативные варианты осуществления, практические примеры и методы работы.
[0110] Нет необходимости упоминать, что настоящее изобретение также включает в себя различные варианты осуществления, которые здесь не описаны. Следовательно, технический объем настоящего изобретения должен определяться только характеризующими изобретение признаками в соответствии с объемом формулы изобретения, соответствующим образом полученной из приведенных выше описаний.
[0111] Соответствующие функции, описанные в вышеупомянутых соответствующих вариантах осуществления, могут быть реализованы на одной или более цепях обработки. Цепи обработки включают в себя запрограммированные процессоры, такие как устройства обработки и т.п., включая электрические цепи. Устройства обработки включают в себя такие устройства, как специализированные интегральные схемы (ASIC) и традиционные схемные составляющие элементы, которые выполнены с возможностью выполнять функции, описанные в вариантах осуществления.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
[0112] 11 устройство помощи при движении
21 блок обнаружения состояния движения
22 блок обнаружения состояния окружения
23 переключатель режима вождения
31 привод
41 блок хранения целевых данных обучения
42 блок изучения характеристик вождения
43 блок идентификации водителя
45 блок выполнения управления автономным вождением
61 блок представления состояния управления.
Реферат
Изобретение относится к способу и устройству помощи при движении. Способ помощи при движении для обучения характеристикам вождения для каждого водителя по данным о движении в ходе ручного вождения водителем и применения результата обучения к управлению движением при автономном вождении в транспортном средстве, способном на переключение ручного вождения водителем и автономного вождения. Способ содержит идентификацию водителя с использованием характеристик вождения в ходе ручного вождения водителем, выполнение управления движением на основе результата обучения, соответствующего идентифицированному водителю, сравнение характеристик вождения в ходе ручного вождения с результатом обучения, соответствующим водителю, и когда различие между характеристиками вождения в ходе ручного вождения и характеристиками вождения в результате обучения больше, чем заданное значение, регистрирование характеристик вождения в ходе ручного вождения в качестве результата обучения от нового водителя. Достигается повышение удобства управления транспортным средством. 4 н. и 9 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство управления транспортным средством
Комментарии