Транспортное средство и интерфейс управления транспортным средством - RU2754020C1
Код документа: RU2754020C1
Чертежи














Описание
Настоящая обычная заявка основана на патентной заявке Японии № 2020-015722, поданной 31 января 2020 года в патентное ведомство Японии, полное содержание которой включено в настоящую заявку путем отсылки.
УРОВЕНЬ ТЕХНИКИ
Область техники
Настоящее изобретение относится к транспортному средству и интерфейсу управления транспортным средством.
Раскрытие предшествующего уровня техники
В последнее время осуществляется разработка технологии автономного вождения для транспортных средств. В частности, в выложенной патентной заявке Японии № 2018-132015 раскрыта система автономного вождения, осуществляющая централизованное автономное управление транспортным средством. Эта система автономного вождения содержит камеру, лазерное устройство, радиолокационное устройство, операционное устройство, датчик наклона, оборудование для автономного вождения и ЭБУ (электронный блок управления) автономного вождения.
В выложенной патентной заявке Японии № 2018-132015 во второй модификации раскрыто ограничение, по меньшей мере, одной из следующих функций: функция движущей силы, функция торможения и функция рулевого управления оборудования для автономного вождения (см. Фиг. 7 и 8). Такое состояние, в котором автономное управление остановлено, позволяет переключиться на ручное управление водителем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Система автономного вождения может быть установлена снаружи на кузове транспортного средства. В этом случае платформа транспортного средства (раскрыта ниже) управляет транспортным средством в соответствии с командами системы автономного вождения, реализуя тем самым автономное вождение.
Чтобы система автономного вождения и платформа транспортного средства взаимодействовали надлежащим образом, предпочтительно обеспечить соответствующий интерфейс между системой автономного вождения и платформой транспортного средства. Значимость такого интерфейса может, в частности, быть высока в том случае, если, например, система автономного вождения и платформа транспортного средства созданы разными разработчиками.
Настоящее изобретение направлено на устранение раскрытого выше недостатка, и задачей настоящего изобретения является разработка соответствующего интерфейса между системой автономного вождения и платформой транспортного средства.
(1) Транспортное средство согласно первому аспекту настоящего изобретения представляет собой транспортное средство, в котором может быть установлена система автономного вождения. Транспортное средство содержит: платформу транспортного средства, осуществляющую управление транспортным средством в соответствии с командой от системы автономного вождения; и интерфейс управления транспортным средством, который служит в качестве интерфейса между системой автономного вождения и платформой транспортного средства. Платформа транспортного средства передает сигнал положения педали тормоза в соответствии со степенью нажатия педали тормоза водителем и сигнал воздействия на педаль тормоза в систему автономного вождения посредством интерфейса управления транспортным средством. Сигнал воздействия на педаль тормоза указывает на то, что педаль тормоза нажата, если сигнал положения педали тормоза указывает на то, что степень нажатия превышает пороговое значение. Сигнал воздействия на педаль тормоза указывает, что замедление транспортного средства выходит за пределы автономного замедления, если запрос замедления в соответствии со степенью нажатия педали превышает запрос замедления со стороны системы.
(2) Транспортное средство дополнительно содержит датчик, который обнаруживает положение педали тормоза. Сигнал положения педали тормоза указывает на отказоустойчивое значение, когда датчик находится в состоянии неисправности.
(3) Интерфейс управления транспортным средством согласно другому аспекту настоящего изобретения служит в качестве интерфейса между системой автономного вождения и платформой транспортного средства, управляющей транспортным средством в соответствии с командой, полученной от системы автономного вождения. Платформа транспортного средства передает сигнал положения педали тормоза в соответствии со степенью нажатия педали тормоза водителем, а также передает сигнал воздействия на педаль тормоза в интерфейс управления транспортным средством. Интерфейс управления транспортным средством передает сигнал положения педали тормоза и сигнал воздействия на педаль тормоза в систему автономного вождения. Сигнал воздействия на педаль тормоза указывает, что педаль тормоза нажата, если сигнал положения педали тормоза указывает, что степень нажатия превышает пороговое значение. Сигнал воздействия на педаль тормоза указывает на выход замедления транспортного средства за пределы автономного замедления, когда запрос замедления в соответствии со степенью нажатия превышает запрос замедления от системы.
(4) Транспортное средство дополнительно содержит датчик, который обнаруживает положение педали тормоза. Сигнал положения педали тормоза указывает на отказоустойчивое значение, когда датчик находится в состоянии неисправности.
Вышеизложенные и прочие цели, отличительные признаки, аспекты и преимущества настоящего изобретения станут более очевидными из последующего подробного раскрытия настоящего изобретения при рассмотрении со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фиг. 1 изображена схема системы «Мобильность как услуга» (MaaS), в которой используется транспортное средство согласно одному из вариантов осуществления настоящего изобретения.
На Фиг. 2 изображена схема, более подробно иллюстрирующая конфигурацию транспортного средства.
На Фиг. 3 изображена блок-схема управления педалью тормоза транспортного средства.
На Фиг. 4 изображена схема, иллюстрирующая сигнал воздействия на педаль тормоза.
На Фиг. 5 изображен временной график, демонстрирующий пример передачи сигнала воздействия на педаль тормоза для транспортного средства.
На Фиг. 6 изображена блок-схема, демонстрирующая управление педалью тормоза для транспортного средства.
На фиг. 7 изображена схема общей конфигурации системы MaaS.
На фиг. 8 изображена схема конфигурации системы транспортного средства MaaS.
На фиг. 9 изображена схема, иллюстрирующая типовой процесс в системе автономного вождения.
На фиг. 10 изображена схема, иллюстрирующая пример синхронизации API относительно остановки и начала движения транспортного средства MaaS.
На фиг. 11 изображена схема, иллюстрирующая пример синхронизации API относительно переключения передач транспортного средства MaaS.
На фиг. 12 изображена схема, иллюстрирующая пример синхронизации API относительно блокировки колес транспортного средства MaaS.
На фиг. 13 изображена схема, иллюстрирующая предельное значение изменения угла поворота шины.
На фиг. 14 изображена схема, иллюстрирующая воздействие педали акселератора.
На фиг. 15 изображена схема, иллюстрирующая воздействие педали тормоза.
На фиг. 16 изображена схема общей конфигурации системы MaaS.
На фиг. 17 изображена схема конфигурации системы транспортного средства.
На фиг. 18 изображена схема, иллюстрирующая конфигурацию подачи питания транспортного средства.
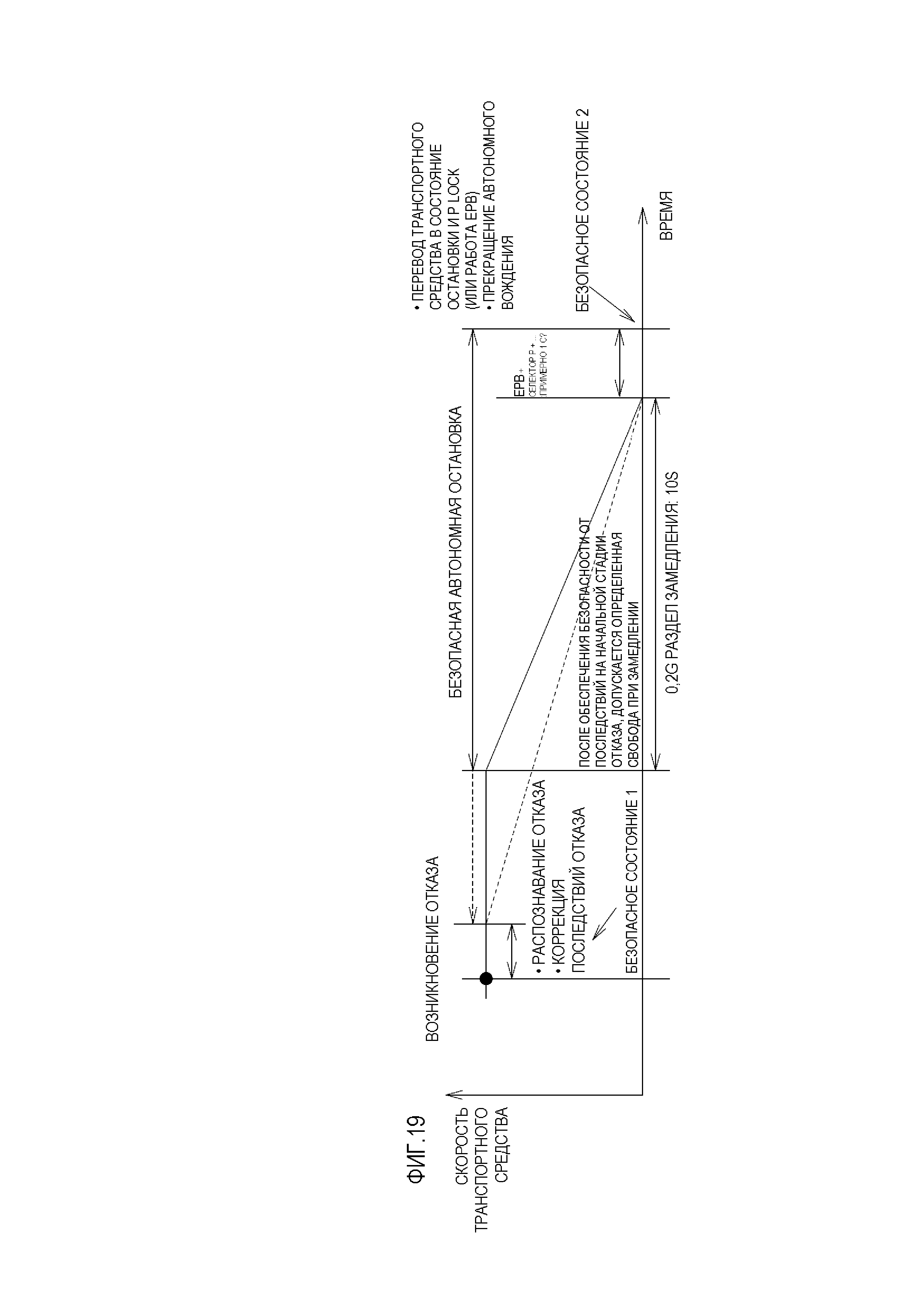
На фиг. 19 изображена схема, иллюстрирующая стратегии до безопасной остановки транспортного средства в момент возникновения неисправности.
На фиг. 20 изображена схема, иллюстрирующая компоновку представляющих функций транспортного средства.
РАСКРЫТИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее будет подробно раскрыт данный вариант осуществления изобретения со ссылкой на чертежи. На чертежах одинаковые или аналогичные элементы обозначены одинаковыми обозначениями, и их описание не повторяется.
В связи со следующим вариантом осуществления раскрыт пример, в котором комплект автономного вождения (ADK) установлен на транспортное средство MaaS (транспортное средство «Мобильность как услуга»). Комплект автономного вождения является инструментом, в который встроено аппаратное и программное обеспечение для реализации автономного вождения, и является одной из форм реализации системы автономного вождения (ADS). Тип транспортного средства, на которое может быть установлен комплект автономного вождения, не ограничен транспортным средством MaaS. Комплект автономного вождения применим для всех типов транспортных средств, в которых может быть реализовано автономное вождение.
[Вариант осуществления изобретения]
<Общая конфигурация>
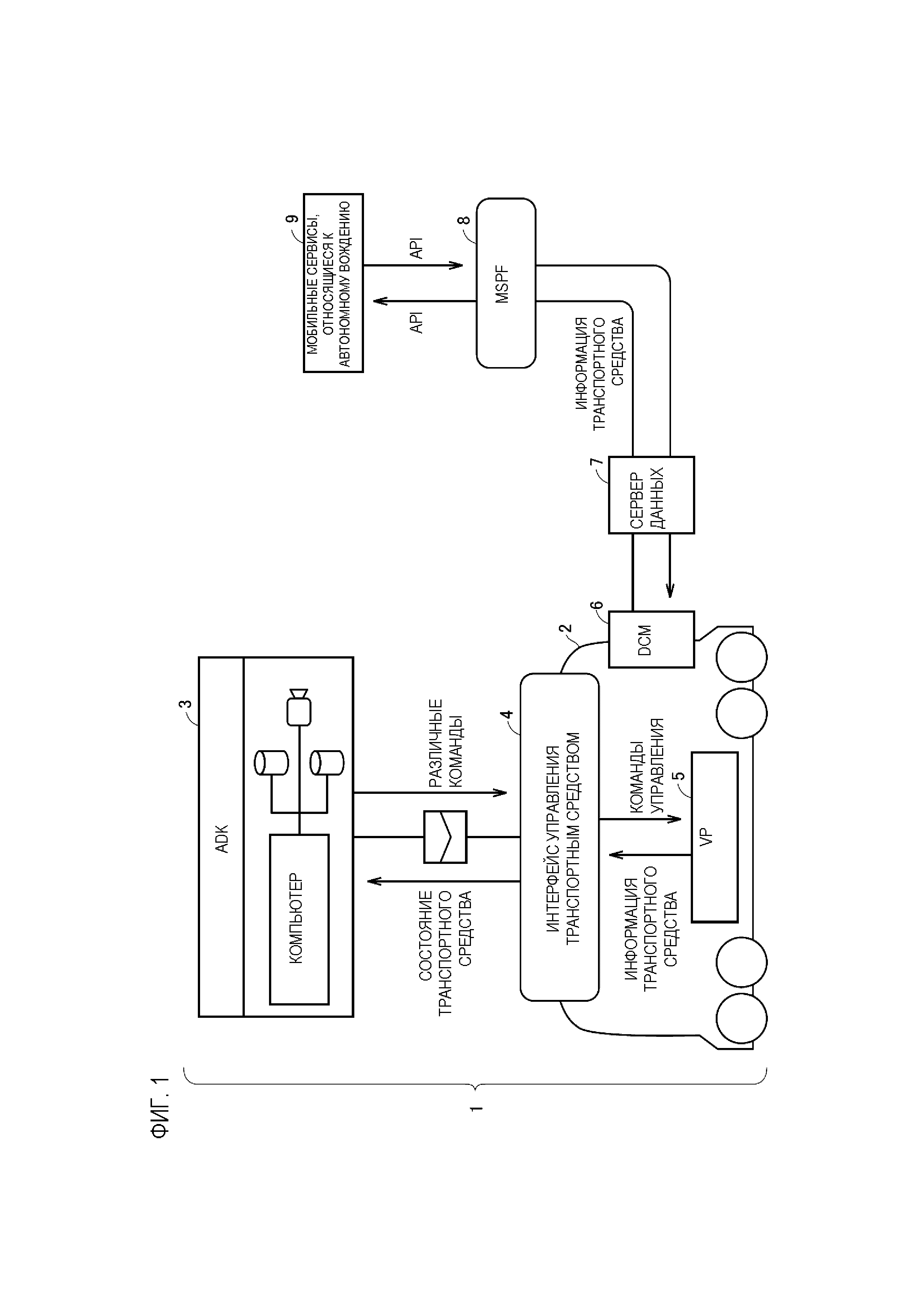
На Фиг. 1 изображена схема системы MaaS, причем используется транспортное средство согласно одному из вариантов осуществления настоящего изобретения. Как показано на Фиг. 1 данная система MaaS содержит транспортное средство 1. Транспортное средство 1 содержит основной кузов 2 транспортного средства и комплект 3 автономного вождения (ADK). Основной кузов 2 транспортного средства содержит интерфейс 4 управления транспортным средством, платформу 5 транспортного средства (VP) и DCM 6 (модуль передачи данных). Система MaaS содержит в дополнение к транспортному средству 1 сервер 7 данных, мобильную сервисную платформу 8 (MSPF) и мобильные сервисы 9, относящиеся к автономному вождению.
Транспортное средство 1 может осуществлять автономное вождение в соответствии с командой ADK 3, установленного на основном кузове 2 транспортного средства. Несмотря на то, что основной кузов 2 транспортного средства показан на Фиг. 1 как расположенный отдельно от ADK 3, фактически ADK 3 установлен на крыше, например основного кузова 2 транспортного средства.
ADK 3 может также быть снят с основного кузова 2 транспортного средства. Если ADK 3 не установлен, основной кузов 2 транспортного средства может перемещаться под управлением водителя. В этом случае VP 5 осуществляет управление движением (управление движением в соответствии с действиями водителя) в ручном режиме.
Интерфейс 4 управления транспортным средством может, например, обмениваться данными с ADK 3 по шине CAN (локальной сети контроллеров). Интерфейс 4 управления транспортным средством выполняет API (прикладной программный интерфейс), определенный для каждого передаваемого сигнала, получая тем самым различные команды от ADK 3 и передавая состояние основного кузова 2 транспортного средства на ADK 3.
Получив команду от ADK 3, интерфейс 4 управления транспортным средством передает на VP 5 команду управления, соответствующую полученной команде. Интерфейс 4 управления транспортным средством также получает различную информацию об основном кузове 2 транспортного средства от VP 5 и передает состояние основного кузова 2 транспортного средства на ADK 3. Конфигурация интерфейса 4 управления транспортным средством будет детально раскрыта ниже.
VP 5 содержит различные системы и датчики для управления основным кузовом 2 транспортного средства. VP 5 управляет транспортным средством в соответствии с командой, переданной ADK 3 через интерфейс 4 управления транспортным средством. В частности, VP 5 управляет транспортным средством в соответствии с командой от ADK 3, реализуя тем самым автономное вождение транспортного средства 1. Конфигурация VP 5 также будет подробно раскрыта ниже.
ADK 3 является типом системы автономного вождения (ADS) для реализации автономного вождения транспортного средства 1. ADK 3 составляет, например, план управления для транспортного средства 1 и передает различные команды для осуществления движения транспортного средства 1 в соответствии с составленным планом управления в интерфейс 4 управления транспортным средством в соответствии с API, определенным для каждой команды. Кроме того, ADK 3 получает от интерфейса 4 управления транспортным средством различные сигналы, указывающие на состояние основного кузова 2 транспортного средства, в соответствии с API, определенным для каждого сигнала, и обусловливает отражение полученного состояния транспортного средства в составляемом плане управления. Конфигурация ADK 3 также будет раскрыта ниже.
DCM 6 содержит интерфейс обмена данными для обмена данными между основным кузовом 2 транспортного средства и сервером 7 данных с помощью радиосвязи. DCM 6 передает на сервер 7 данных различную информацию о транспортном средстве, например скорость, местоположение или состояние автономного вождения. Кроме того, DCM 6 получает от мобильных сервисов 9 относящихся к автономному вождению через MSPF 8 и сервер 7 данных, например, различные данные для управления движением автономных транспортных средств, в том числе, для мобильных сервисов 9 относящихся к автономному вождению транспортного средства 1.
Сервер 7 данных выполнен с возможностью радиосвязи с различными автономными транспортными средствами 1 и обмена данными с MSPF 8. Сервер 7 данных хранит различные типы данных (данные, связанные с состоянием транспортного средства и управлением транспортным средством) для управления движением автономного транспортного средства.
MSPF 8 представляет собой интегрированную платформу, к которой подключены различные мобильные сервисы. Помимо мобильных сервисов 9 относящихся к автономному вождению, к MSPF 8 могут быть подключены различные мобильные сервисы, не показанные на фигуре (например, различные мобильные сервисы, предоставляемые компаниями, предлагающими услуги совместного проезда, совместного пользования транспортным средством, страхования, аренды транспортных средств, такси и т.п.). Различные мобильные сервисы, включая мобильные сервисы 9, могут использовать различные функции MSPF 8 надлежащим образом для соответствующих сервисов, используя API, опубликованные на MSPF 8.
Мобильные сервисы 9 относящиеся к автономному вождению предлагают мобильные сервисы, использующие автономное транспортное средство, включая транспортное средство 1. Используя API, опубликованный на MSPF 8, мобильные сервисы 9 могут получить от MSPF 8, например, данные для управления вождением транспортного средства 1, обменивающегося данными с сервером 7 данных, и/или информацию и т.п., хранящуюся на сервере 7 данных. Используя вышеуказанный API, мобильные сервисы 9 также передают на MSPF 8 данные и т.п.для управления, например, автономными транспортными средствами, включая транспортное средство 1.
MSPF 8 публикует API для использования различных типов данных о состоянии транспортного средства и управлении транспортным средством, необходимых для разработки ADS. Компании ADS могут использовать в качестве API данные о состоянии транспортного средства и управлении транспортным средством, необходимые для разработки ADS и хранящиеся на сервере 7 данных.
<Конфигурация транспортного средства>
На Фиг. 2 более подробно представлена конфигурация транспортного средства 1. Как показано на Фиг. 2, ADK 3 содержит вычислительный модуль 31, датчики 32 восприятия, датчики 33 ориентации, HMI 34 (человеко-машинный интерфейс) и функцию 35 очистки датчиков.
Во время автономного вождения транспортного средства 1 вычислительный модуль 31 использует различные датчики (раскрытые ниже) для получения информации об обстановке вокруг транспортного средства, а также ориентации, характеристиках и местоположении транспортного средства 1. Вычислительный модуль 31 также получает состояние транспортного средства 1 от VP 5 через интерфейс 4 управления транспортным средством и определяет следующую операцию (ускорение, замедление, поворот и т.п.) транспортного средства 1. Вычислительный модуль 31 передает на интерфейс 4 управления транспортным средством команду осуществления определенной следующей операции.
Датчики 32 восприятия распознают обстановку вокруг транспортного средства. В частности, датчики 32 восприятия содержат, например, по меньшей мере, одно из следующих устройств: лазерный радар, РЛС миллиметрового диапазона и камеру.
Лазерный радар подсвечивает цель (например, человека, другое транспортное средство или препятствие) инфракрасным импульсным лазерным излучением и измеряет расстояние до цели, основываясь на времени, необходимом для отражения света от цели и возврата к лазерному радару. РЛС миллиметрового диапазона использует миллиметровую волну к цели и регистрирует миллиметровую волну, отраженную от цели, для измерения расстояния до цели и/или направления цели. Камера расположена на задней стороне зеркала заднего вида в салоне и предназначена, например, для съемки зоны перед транспортным средством 1. Изображение, снятое камерой, может быть обработано процессором обработки изображений, оснащенным искусственным интеллектом (ИИ). Информация, полученная датчиками 32 восприятия, поступает в вычислительный модуль 31.
Датчики 33 ориентации определяют ориентацию, характеристики и местоположение транспортного средства 1. В частности, к датчикам 33 ориентации относятся, например инерциальный измерительный блок (IMU) и глобальная система позиционирования (GPS).
IMU распознает, например, замедление транспортного средства 1 в продольном, поперечном и вертикальном направлении, а также угловую скорость транспортного средства 1 в направлении крена, тангажа и рыскания. GPS использует информацию, полученную от нескольких спутников GPS, находящихся на орбите Земли, для определения местоположения транспортного средства 1. Информация, полученная датчиками 33 ориентации, также поступает в вычислительный модуль 31.
HMI 34 содержит, например, устройство отображения, устройство вывода аудио и устройство управления. В частности, HMI 34
может содержать дисплей сенсорной панели и/или интеллектуальный динамик (динамик ИИ). Во время автономного вождения транспортного средства 1, во время вождения в ручном режиме или во время переключения режимов, например, HMI 34 предоставляет информацию пользователю или принимает управляющие действия пользователя.
Функция 35 очистки датчиков выполнена с возможностью удаления грязи с каждого датчика. В частности, функция 35 очистки
датчиков удаляет грязь с объектива камеры, источника лазерного излучения или источника излучения миллиметровой волны, например, при помощи очищающей жидкости или стеклоочистителя.
Интерфейс 4 управления транспортным средством содержит интерфейсный блок 41 (VCIB) управления транспортным средством и VCIB 42. Каждый VCIB 41, 42 содержит процессор, например ЦП (центральный процессор), и память, например ПЗУ (постоянное запоминающее устройство) и ОЗУ (оперативное запоминающее устройство). Каждый из VCIB 41 и VCIB 42 соединен с вычислительным модулем 31 ADK 3 с возможностью передачи данных. VCIB 41 соединен с VCIB 42 с возможностью обмена данными между ними.
Как VCIB 41, так и VCIB 42 ретранслируют различные команды от ADK 3 и передают каждую ретранслированную команду в качестве команды управления на VP 5. В частности, как VCIB 41, так и VCIB 42 используют хранящуюся в памяти программу и т.п.для преобразования различных команд, поступающих от ADK 3, в команды управления, которые должны использоваться для управления каждой системой VP 5, и передают команды управления в систему, к которой они подключены. Кроме того, как VCIB 41, так и VCIB 42 осуществляют соответствующую обработку (включая ретрансляцию) информации транспортного средства, поступающей с VP 5, и передают полученную информацию в качестве информации транспортного средства в ADK 3.
Несмотря на то, что VCIB 41 и VCIB 42 отличаются друг от друга некоторыми составными частями VP 5, к которой подключены VCIB 41 и VCIB 42, в основном их функции эквивалентны. VCIB 41 и VCIB 42 имеют эквивалентные функции управления тормозной системой и системой рулевого управления, благодаря чему, например, система управления между ADK 3 и VP 5 становится резервной (дублируемой). Таким образом, даже при отказе какой-либо части системы система управления может быть переключена или работа системы управления, в которой произошел отказ, может быть прервана, например, для поддержания функций (в частности, рулевого управления и торможения) VP 5.
VP 5 содержит педаль 50 тормоза, тормозные системы 511, 512, датчик 52 скорости вращения колеса, системы 531, 532 рулевого управления, датчики 541, 542 угла поворота шестерен, систему 551 электрического стояночного тормоза (EPB - Electric Parking Brake), систему 552 блокировки трансмиссии на парковке (P-Lock), движительную систему 56, систему 57 предаварийной безопасности (PCS), камеру/радар 58 и кузовную систему 59.
VCIB 41 соединен посредством шины связи с возможностью передачи данных с тормозной системой 512, системой 531 рулевого управления и системой 552 P-Lock из нескольких систем VP 5 (а именно, система EPB 551, движительная система 56 и кузовная система 59). VCIB 42 соединен посредством шины связи с возможностью передачи данных с тормозной системой 511, системой 532 рулевого управления и системой 552 P-Lock.
Педаль 50 тормоза принимает действие водителя (нажатие). Педаль 50 тормоза оснащена датчиком положения тормоза (не показан), который определяет степень нажатия, с которой нажата педаль 50 тормоза.
Тормозные системы 511, 512 выполнены с возможностью управления рядом тормозных устройств (не показанных на фигуре), предусмотренных для соответствующих колес транспортного средства 1. Эти тормозные устройства могут содержать систему дискового тормоза, использующую гидравлическое давление, регулируемое приводом. Тормозная система 511 и тормозная система 512 могут быть выполнены с возможностью наличия эквивалентных функций. В альтернативном варианте одна из тормозных систем 511, 512 может быть выполнена с возможностью независимого управления тормозным усилием каждого колеса во время движения транспортного средства, а другая может быть выполнена с возможностью управления тормозным усилием таким образом, чтобы одинаковое тормозное усилие развивалось для каждого колеса во время движения транспортного средства.
В соответствии с предварительно заданной командой управления, переданной от ADK 3 через интерфейс 4 управления транспортным средством, каждая тормозная система 511, 512 формирует команду торможения для устройства торможения. Кроме того, тормозные системы 511, 512 управляют тормозным устройством, используя, например, команду торможения, сформированную одной из тормозных систем 511, 512. Кроме того, когда происходит отказ одной из тормозных систем 511, 512, команда торможения, сформированная другой системой, используется для управления тормозным устройством.
В этом примере к тормозной системе 512 подключен датчик 52 скорости вращения колеса. Датчик 52 скорости вращения колеса предусмотрен, например, на каждом колесе транспортного средства 1. Датчик 52 скорости вращения колеса определяет скорость вращения колеса и передает обнаруженную скорость вращения в тормозную систему 512. Тормозная система 512 передает на VCIB 41 скорость вращения каждого колеса в качестве одной из единиц информации, содержащихся в информации о транспортном средстве.
Системы 531, 532 рулевого управления выполнены с возможностью управления углом поворота рулевого колеса транспортного средства 1 посредством рулевого устройства (не показанного на фигуре). Рулевое устройство содержит, например, электроусилитель рулевого управления (EPS - Electric Power Steering) с реечной передачей, способный регулировать угол поворота рулевого колеса с помощью привода.
Система 531 рулевого управления и система 532 рулевого управления имеют эквивалентные функции. Каждая система 531, 532 рулевого управления формирует команду рулевого управления для рулевого устройства в соответствии с предварительно заданной командой управления, передаваемой из ADK 3 посредством интерфейса 4 управления транспортным средством. Используя, например, команду рулевого управления, формируемую одной из систем 531, 532 рулевого управления, системы 531, 532 рулевого управления управляют рулевым устройством. Если происходит отказ одной из систем 531, 532 рулевого управления, команда рулевого управления, формируемая другой системой рулевого управления, используется для управления устройством рулевого управления.
К системе 531 рулевого управления подключен датчик 541 угла поворота шестерни. К системе 532 рулевого управления подключен датчик 542 угла поворота шестерни. Каждый из датчиков 541, 542 угла поворота шестерни определяет угол поворота шестерни (угол шестерни), соединенной с валом вращения привода, и передает обнаруженный угол шестерни на подключенную систему 531, 532 рулевого управления.
Система 551 EPB выполнена с возможностью управления EPB, предусмотренным на колесе транспортного средства 1. EPB предусмотрен отдельно от тормозного устройства тормозных систем 511, 512 и фиксирует колесо при помощи привода. Данный привод может регулировать гидравлическое давление, прикладываемое на тормозное устройство, отдельно от тормозных систем 511, 512. EPB фиксирует колесо, например, посредством активизации привода барабанного парковочного тормоза.
Система 552 P-Lock выполнена с возможностью управления устройством P-Lock (не показанным на фигуре), предусмотренным для трансмиссии транспортного средства 1. В частности, предусмотрена шестерня (блокирующая шестерня) для присоединения к вращающемуся элементу в трансмиссии. Кроме того, для зубчатой части блокирующей шестерни также предусмотрен стержень парковочной блокировки, выполненный с возможностью регулировки положения с помощью привода. Устройство P-Lock соответствует выступу, расположенному на головке стержня парковочной блокировки, что позволяет зафиксировать вращение выходного вала трансмиссии.
Движительная система 56 способна переключать диапазон передач с помощью устройства переключения передач (не показанного на фигуре) и управлять движущей силой транспортного средства 1 в направлении движения, используя источник привода (не показанный на фигуре). Устройство переключения передач выполнено с возможностью выбора одного из нескольких диапазонов переключения передач. Источник привода может содержать, например, мотор-генератор и двигатель.
Система 57 PCS осуществляет управление для предотвращения столкновения транспортного средства 1 и/или снижения повреждений транспортного средства 1, используя камеру/радар 58. В частности, система 57 PCS соединена с тормозной системой 512. Система 57 PCS использует камеру/радар 58 для обнаружения объекта спереди и определяет, существует ли возможность столкновения транспортного средства 1 с объектом, на основании расстояния до объекта. Если система 57 PCS обнаружит возможность столкновения, система 57 PCS передает команду торможения на тормозную систему 512 таким образом, чтобы повысить тормозное усилие.
Кузовная система 59 выполнена с возможностью управления различными составными частями (например, индикатором направления, звуковым сигналом или стеклоочистителем) в зависимости от состояния движения или окружающей среды движения транспортного средства 1.
Прочие системы, помимо тормозных систем 511, 512 и систем 531, 532 рулевого управления, также выполнены с возможностью управления соответствующими связанными устройствами в соответствии с заданной командой управления, переданной от ADK 3 через интерфейс 4 управления транспортным средством. В частности, система 551 EPB получает команду управления от ADK 3 посредством интерфейса 4 управления транспортным средством и управляет EPB в соответствии с командой управления. Система 552 P-Lock получает команду управления от ADK 3 посредством интерфейса 4 управления транспортным средством и управляет устройством P-Lock в соответствии с командой управления. Движительная система 56 получает команду управления от ADK 3 посредством интерфейса 4 управления транспортным средством и управляет устройством переключения передач и источником привода в соответствии с командой управления. Кузовная система 59 получает команду управления от ADK 3 посредством интерфейса 4 управления транспортным средством и управляет вышеуказанными составными частями в соответствии с командой управления.
Для раскрытого выше тормозного устройства, устройства рулевого управления, EPB, устройства P-Lock, устройства переключения передач и источника привода может быть отдельно предусмотрено, например, устройство управления, позволяющее пользователю осуществлять ручное управление.
<Управление педалью тормоза>
На Фиг. 3 изображена функциональная блок-схема управления педалью тормоза транспортного средства 1. Как показано на Фиг. 2 и Фиг. 3, тормозная система 511 содержит вычислитель 511A положения, устройство 511B разрешения замедления и определитель 511C воздействия. Хотя в качестве примера раскрыта тормозная система 511 из-за ограниченного места в данном документе, тормозная система 512 может иметь функции, аналогичные тормозной системе 511.
Вычислитель 511A положения принимает от датчика положения тормоза (не показан) сигнал, указывающий степень нажатия на педаль 50 тормоза водителем, и выводит в VCIB 41 и в определитель 511C воздействия сигнал положения педали тормоза, указывающий степень нажатия педали тормоза. Кроме того, вычислитель 511A положения выдает в устройство разрешения 511B замедления запрос замедления в соответствии со степенью нажатия водителем на педаль 50 тормоза.
Устройство разрешения 511B замедления принимает запрос замедления от вычислителя 511A положения, также принимает запрос замедления от любой из различных систем и проводит сопоставительную оценку между двумя запросами замедления. Более конкретно, устройство разрешения 511B замедления вычисляет сумму двух замедлений. Устройство разрешения 511B замедления выводит на определитель 511C воздействия результат сопоставительной оценки между двумя запросами замедления (сумма двух замедлений в этом примере).
В дальнейшем запрос замедления от вычислителя 511A положения называется «запросом замедления от водителя», а запрос замедления от любой из различных систем называется «запросом замедления от системы», чтобы различать их.
Хотя источником запроса замедления от системы является, например, ADK 3, источник запроса этим не ограничивается, им может быть, например, система 57 PCS. Когда источником запроса замедления от системы является ADK 3, устройство разрешения 511B замедления принимает запрос замедления от системы через интерфейс 4 управления транспортным средством.
Определитель 511C воздействия принимает сигнал положения педали тормоза от вычислителя 511A положения, а также результат сопоставительной оценки от устройства разрешения 511B замедления. Определитель 511C воздействия формирует сигнал воздействия на педаль тормоза на основе сигнала положения педали тормоза и результата сопоставительной оценки и выдает сформированный сигнал воздействия на педаль тормоза в VCIB 41.
VCIB 41 содержит процессор 411 положения педали тормоза и процессор 412 воздействия на педаль тормоза. Хотя на Фиг. 3 показан только VCIB 41, другие VCIB 42, предусмотренные для резервирования, также имеют аналогичные функции.
Процессор 411 положения педали тормоза принимает сигнал положения педали тормоза от тормозной системы 511 (вычислителя 511А положения) и выполняет предварительно заданную обработку сигнала положения педали тормоза. Процессор 411 положения педали тормоза выдает обработанный сигнал положения педали тормоза на ADK 3.
В то время как транспортное средство 1 находится в нормальном состоянии, сигнал положения педали тормоза, выдаваемый в ADK 3, обеспечивает степень нажатия педали тормоза в соответствии с обнаруженным значением датчика положения тормоза. Степень нажатия педали тормоза представлена значением в диапазоне от 0% до 100%. Следует отметить, что степень нажатия педали тормоза может превышать 100% вследствие ошибки сборки педали тормоза и/или датчика положения тормоза.
В то время как транспортное средство 1 находится в состоянии неисправности, в частности, при отказе датчика положения тормоза, сигнал положения педали тормоза, который выдается в ADK 3, обеспечивает отказоустойчивое значение. Отказоустойчивое значение представляет собой значение, соответствующее степени нажатия педали тормоза, равной 100%, и равно, например 0xFF.
Процессор 412 воздействия на педаль тормоза принимает сигнал воздействия на педаль тормоза от определителя 511C воздействия и выполняет предварительно заданную обработку сигнала воздействия на педаль тормоза. Процессор 412 воздействия на педаль тормоза выдает обработанный сигнал воздействия на педаль тормоза на ADK 3. Следует отметить, что эту обработку может выполнять определитель 511C воздействия на, а процессор 412 воздействия на педаль тормоза может только передавать сигнал воздействия на педаль тормоза от определителя 511C воздействия для выдачи сигнала в ADK 3. Далее раскрыто, что указывает сигнал воздействия на педаль тормоза.
<Воздействие на педаль тормоза>
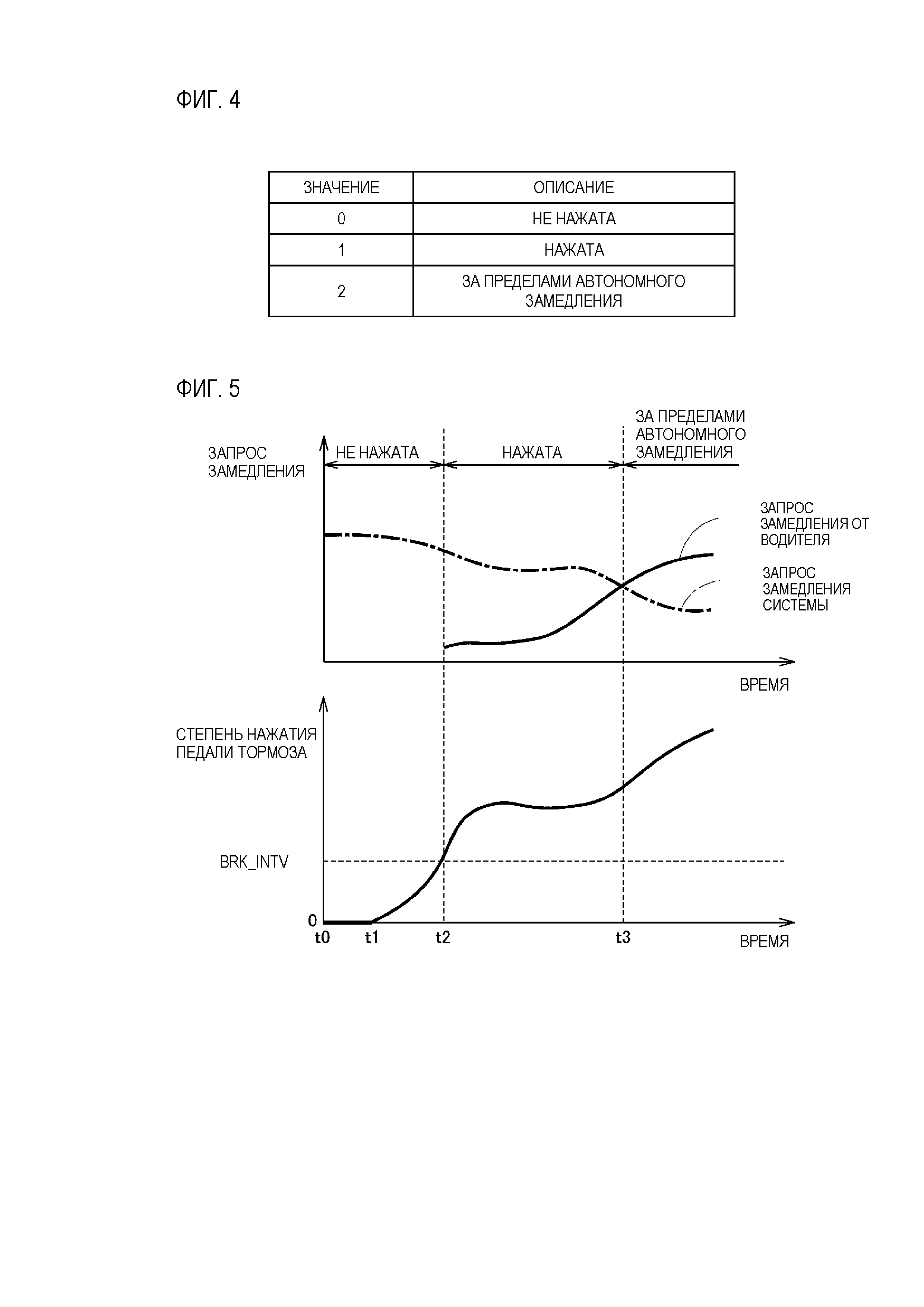
На Фиг. 4 показан сигнал воздействия на педаль тормоза. Как показано на Фиг. 4, сигнал воздействия на педаль тормоза принимает значение, равное одному из значений 0, 1 или 2.
Сигнал воздействия на педаль тормоза со значением 0 указывает, что педаль 50 тормоза не нажата. Сигнал воздействия на педаль тормоза, полагая значение равным 1 указывает, что педаль 50 тормоза нажата. Сигнал воздействия на педаль тормоза, полагая значение равным 2, соответствует состоянию, при котором запрос замедления, генерируемый в соответствии с нажатием педали 50 тормоза (запрос замедления от водителя), превышает запрос замедления, например, от ADK 3 (запрос замедления от системы). Это состояние в данном случае называется «за пределами автономного замедления».
На Фиг. 5 изображен временной график, демонстрирующий пример передачи сигнала воздействия на педаль тормоза для транспортного средства 1. На Фиг. 5 горизонтальная ось представляет собой истекшее время, а вертикальная ось представляет запрос замедления для верхней и степень нажатия педали тормоза для нижней.
Согласно Фиг. 5, степень нажатия педали тормоза составляет 0% в начальный момент времени t0. В данном случае значение сигнала воздействия на педаль тормоза равно 0, это указывает на то, что педаль 50 тормоза не нажата.
В момент времени t1 водитель начинает нажимать на педаль 50 тормоза. Затем, в момент времени t2, степень нажатия педали тормоза становится выше предварительно заданного порогового значения (BRK_INTV). Это пороговое значение является значением для так называемого люфта педали 50 тормоза и определяется, например, как несколько процентов. Когда степень нажатия тормоза становится больше порогового значения BRK_INTV, значение сигнала воздействия на педаль тормоза изменяется от 0 до 1. Сигнал воздействия на педаль тормоза в данный момент указывает, что педаль 50 тормоза нажата.
В момент времени t3 степень нажатия тормоза (запрос замедления от водителя) в соответствии со степенью нажатия на педаль 50 тормоза становится выше, чем запрос замедления от системы. Затем значение сигнала воздействия на педаль тормоза изменяется с 1 на 2. Сигнал воздействия на педаль тормоза в это время указывает на замедление за пределами автономного замедления.
<Поток управления>
На Фиг. 6 изображена блок-схема, демонстрирующая управление педалью тормоза для транспортного средства 1. Процесс, изображенный на блок-схеме, осуществляется, например, по истечении каждого предварительно заданного периода управления. Несмотря на то, что каждый этап, включенный в данную блок-схему, в основном реализуется путем обработки программным обеспечением транспортного средства 1 (VP 5 или интерфейс 4 управления транспортным средством), он также может быть реализован специализированным аппаратным обеспечением (электрической цепью), выполненным в VP 5 или интерфейсе 4 управления транспортным средством. Этап обозначен здесь как S.
В дальнейшем VP 5 и интерфейс 4 управления транспортным средством называют транспортным средством 1, если их не нужно отличать друг от друга. Если осуществляющий процесс компонент раскрыт здесь как транспортное средство 1, процесс может осуществляться посредством VP 5 или интерфейса 4 управления транспортным средством.
Согласно Фиг. 6, на S1 транспортное средство 1 получает степень нажатия педали тормоза, указываемую сигналом (S2) положения педали тормоза.
На этапе S2 транспортное средство 1 определяет, превышает ли степень нажатия педали тормоза пороговое значение BRK_INTV. Когда степень нажатия тормоза меньше или равна пороговому значению BRK_INTV (НЕТ на этапе S2), транспортное средство 1 устанавливает значение сигнала воздействия на педаль тормоза на 0, чтобы указать на то, что педаль 50 тормоза не нажата (этап S7). После этого транспортное средство 1 обусловливает продолжение процесса на этапе S6.
Напротив, когда степень нажатия педали тормоза превышает пороговое значение BRK_INTV (ДА на этапе S2), транспортное средство 1 устанавливает значение сигнала воздействия на педаль тормоза на 1, чтобы указать на то, что педаль 50 тормоза нажата (этап S3).
На этапе S4 транспортное средство 1 дополнительно определяет, превышает ли запрос замедления от водителя, соответствующий степени нажатия тормоза, запрос замедления от системы. Когда запрос замедления от водителя больше, чем запрос замедления от системы (ДА на этапе S4), транспортное средство 1 устанавливает значение сигнала воздействия на педаль тормоза равным 2, чтобы указать на возникновение замедления за пределами автономного замедления (этап S5). После этого транспортное средство 1 обусловливает продолжение процесса на этапе S6.
Когда запрос замедления от водителя меньше или равен запросу замедления от системы (НЕТ на этапе S4), транспортное средство 1 пропускает операцию этапа S5 и обусловливает продолжение процесса на S6. В данном случае значение сигнала воздействия на педаль тормоза остается равным 1, это указывает на то, что педаль 50 тормоза нажата.
На этапе S6 транспортное средство 1 выдает в ADK 3 сигнал воздействия на педаль тормоза, установленный на одно из значений 0, 1 или 2.
Как указано выше, настоящим изобретением предложен интерфейс 4 управления транспортным средством, который служит в качестве интерфейса между ADK 3 и VP 5. Таким образом, VP 5 передает сигнал положения педали тормоза и сигнал воздействия на педаль тормоза на ADK 3 посредством интерфейса 4 управления транспортным средством. Таким образом, разработчик ADK 3 может обеспечить реализацию функции обмена данными ADK 3 в соответствии с процедурой и форматом данных (API), например, определенными для интерфейса 4 управления транспортным средством, таким образом, чтобы ADK 3 и VP 5 работали совместно, даже если разработчик не знает в подробностях спецификацию VP 5. В данном варианте осуществления между ADK 3 и VP 5 может быть предусмотрен соответствующий интерфейс.
VP 5 может иметь режим NVO (управление вне транспортного средства), в котором транспортное средство 1 может быть переведен на полностью беспилотное вождение. Когда VP 5 находится в режиме NVO, транспортное средство 1 может отклонить (аннулировать) запрос замедления от водителя, независимо от степени нажатия на педаль 50 тормоза. В данном случае значение сигнала воздействия на педаль тормоза никогда не может быть равным 2.
[Пример 1]
Платформа MaaS транспортного средства «Тойота»
Спецификация API
для разработчиков ADS
[Standard Edition #0.1]
История версий
Таблица 1
Предметный указатель
1. Схема 4
1.1. Назначение этой спецификации 4
1.2. Целевое транспортное средство 4
1.3. Определение термина 4
1.4. Предосторожности при обращении 4
2. Структура 5
2.1. Общая структура MaaS 5
2.2. Структура системы транспортного средства MaaS 6
3. Интерфейсы приложений 7
3.1. Распределение ответственности при использовании API 7
3.2. Типовое использование API 7
3.3. API для управления движением транспортных средств 9
3.3.1. Функции 9
3.3.2. Входы 16
3.3.3. Выходы 23
3.4. API для управления кузовом 45
3.4.1. Функции 45
3.4.2. Входы 45
3.4.3. Выходы 56
3.5. API для управления питанием 68
3.5.1. Функции 68
3.5.2. Входы 68
3.5.3. Выходы 69
3.6. API для функций безопасности 70
3.6.1. Функции 70
3.6.2. Входы 70
3.6.3. Выходы 70
.7. API для функций защищенности 74
3.7.1. Функции 74
3.7.2. Входы 74
3.7.3. Выходы 76
3.8. API для услуги MaaS 80
3.8.1. Функции 80
3.8.2. Входы 80
3.8.3. Выходы 80
1. Схема
1.1. Назначение этой спецификации
Этот документ является спецификацией API платформы транспортного средства «Тойота» и содержит описание, использование и предупреждения интерфейса приложения.
1.2. Целевое транспортное средство
e-Palette, транспортное средство MaaS, выпущенное компанией «Тойота» по концепции POV (личное транспортное средство)
1.3. Определение термина
Таблица 2
1.4. Предосторожности при обращении
Это первый проект документа.
Все данные могут быть изменены. Такие изменения доводятся до сведения пользователей. Обратите внимание, что некоторые детали еще подлежат уточнению и будут обновлены позже.
2. Структура
2.1. Общая структура MaaS
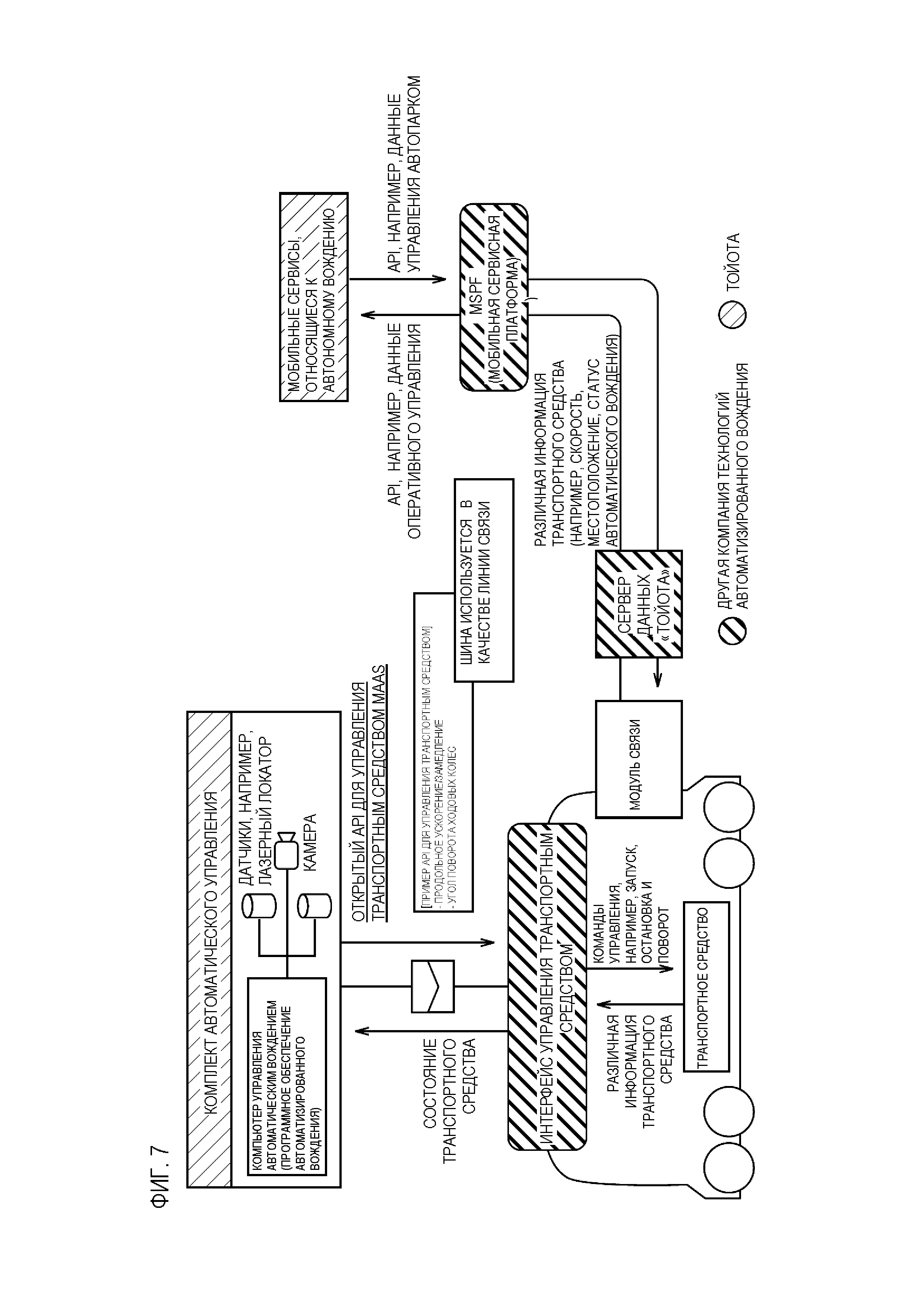
Изображена общая структура MaaS с целевым транспортным средством (фиг. 7).
Технология управления транспортным средством используется в качестве интерфейса для поставщиков технологий.
Поставщики технологий могут получить открытые API, в частности, статус транспортного средства и управление транспортным средством, необходимые для разработки автоматизированных систем вождения.
2.2. Структура системы транспортного средства MaaS
Архитектура системы показана как исходное условие (фиг. 8).
Целевое транспортное средство использует физическую архитектуру CAN для шины между ADS и VCIB. Для реализации каждого API в данном документе кадры CAN и назначение битов отображаются в виде «таблицы назначения битов» в отдельном документе.
3. Интерфейсы приложений
3.1. Распределение ответственности при использовании API
При использовании API базовое распределение ответственности между ADS и VP транспортного средства выглядит следующим образом.
[ADS]
ADS составляет план управления и передает параметры управления транспортным средством в VP.
[VP]
Toyota VP контролирует каждую систему VP на основании показаний ADS.
3.2. Типовое использование API
В данном разделе описано типовое использование API.
CAN принята в качестве линии связи между ADS и VP. Таким образом, по существу, ADS выполняет API в каждое определенное время цикла каждого API.
Типичный порядок действий ADS при выполнении API выглядит следующим образом (фиг. 9).
3.3. API для управления движением транспортных средств
В этом разделе описаны API для управления движением транспортного средства, осуществляемого в транспортном средстве MaaS.
3.3.1. Функции
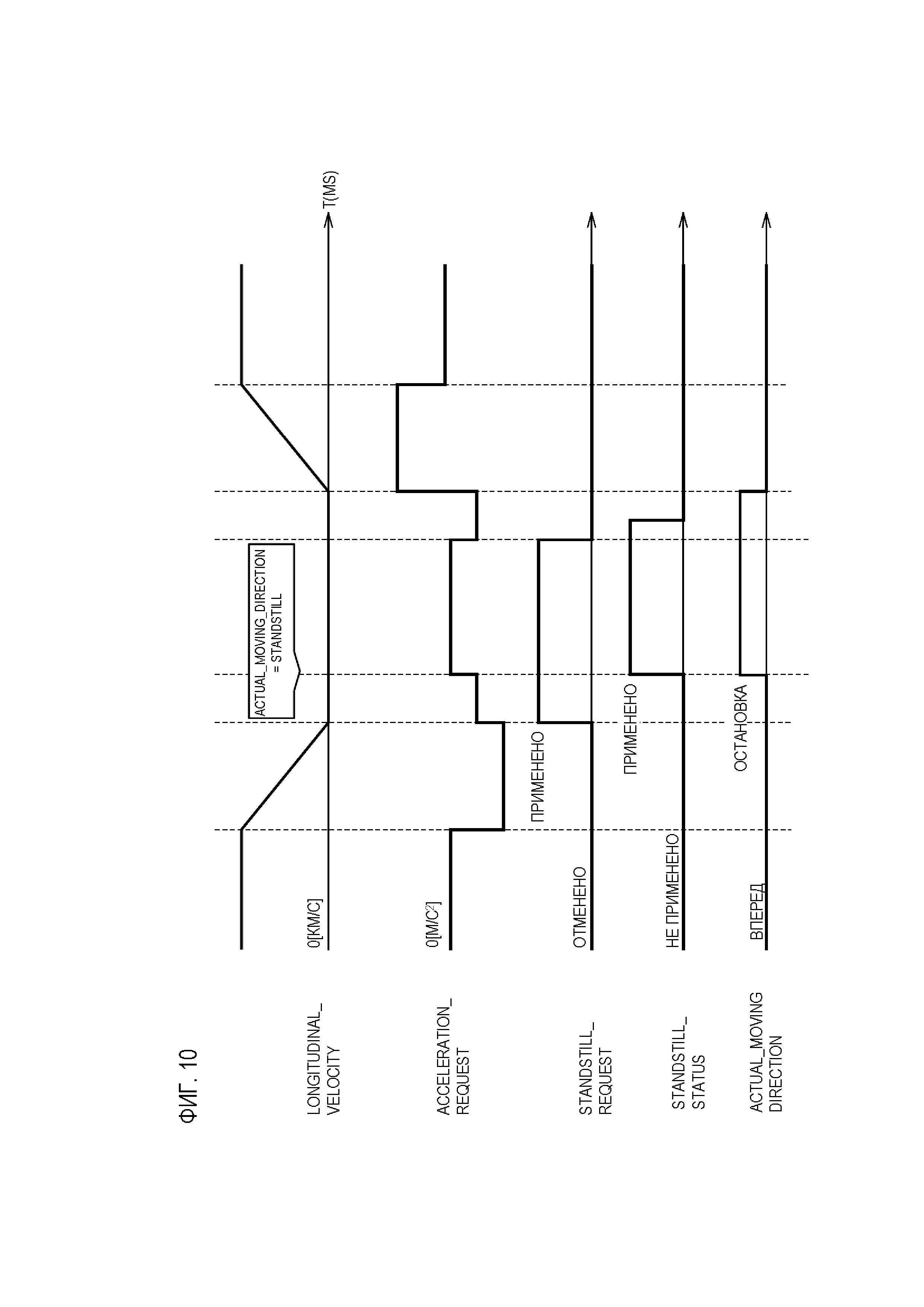
3.3.1.1. Остановка и последовательность запуска
Описывается переход в режим остановки (неподвижности) и последовательность запуска транспортного средства. Эта функция предполагает, что транспортное средство находится в режиме Autonomy_State = Автономный режим. В других режимах запрос отклоняется.
На нижеследующей схеме показан пример.
Команда ускорения запрашивает замедление и останавливает транспортное средство. Затем, когда будет подтверждена продольная скорость (Longitudinal_Velocity), равная 0 [км/ч], передается команда остановки (Standstill Command) = «Применено». После завершения управления удержанием тормоза статус остановки принимает значение «Применено». До тех пор команда ускорения должна продолжать запрос замедления. Если команда остановки (Standstill Command) = «Применено» или запрос замедления командой ускорения отменяется, переход к управлению удержанием тормоза не происходит. После этого транспортное средство продолжает оставаться в режиме остановки до тех пор, пока не будет отправлена команда остановки (Standstill Command) = «Применено». В течение этого периода команда ускорения (Acceleration Command) может иметь значение 0 (ноль).
Если транспортное средство необходимо запустить, управление удержанием тормоза отменяется путем установления команды остановки (Standstill Command) на значение «Отменено». В то же время, управление ускорением/замедлением осуществляется на основании команды ускорения (Acceleration Command) (фиг. 10).
Электрический стояночный тормоз включается, когда статус остановки (Standstill Command) = «Применено» имеет место в течение 3 минут.
3.3.1.2. Последовательность запроса направления
Описана последовательность переключения передач. Эта функция предполагает, что Autonomy_State = Автономный режим. В противном случае запрос отклоняется.
Переключение передач происходит только во время Actual_Moving_Direction = «остановка»). В противном случае запрос отклоняется.
На следующей схеме показан пример. Команда ускорения запрашивает замедление и останавливает транспортное средство. После того, как Actual_Moving_Direction устанавливается на значение «остановка», любая позиция селектора может быть запрошена командой направления движения. (В приведенном ниже примере «D» → «R»).
При переключении передачи команда ускорения (Acceleration Command) должна запрашивать замедление.
После переключения передачи управление ускорением/замедлением осуществляется на основании значения команды ускорения (Acceleration Command) (фиг. 11).
3.3.1.3. Последовательность блокировки колес (WheelLock Sequence)
Описано включение и выключение блокировки колес. Эта функция предполагает, что Autonomy_State = Автономный режим, в противном случае запрос отклоняется.
Эта функция может быть выполнима только на остановленном транспортном средстве. Команда ускорения (Acceleration Command) запрашивает замедление и останавливает транспортное средство. После того, как Actual_Moving_Direction устанавливается на значение «остановка», блокировка колес (WheelLock) включается командой иммобилизации (Immobilization Command) = «Применено». Команда ускорения устанавливается на «Замедление», пока статус иммобилизации не примет значение «Применено».
Если необходима отмена, то на неподвижном транспортном средстве запрашивается команда иммобилизации = «Отменено». Команда ускорения в это время имеет значение «Замедление».
После этого транспортное средство ускоряется/замедляется на основании значения команды ускорения (фиг. 12).
3.3.1.4. Road_Wheel_Angle Request
Эта функция предполагает, что Autonomy_State = Автономный режим, в противном случае запрос отклоняется.
Команда угла поворота колес (Tire Turning Angle Command) является относительным значением Estimated_Road_Wheel_Angle_Actual.
Например, в случае движения транспортного средства по прямой Estimated_Road_Wheel_Angle_Actual = 0,1 [рад];
Если ADS запрашивает движение по прямой, то команду угла поворота колес следует установить на 0+0,1 = 0,1 [рад].
Если ADS запрашивает поворот на - 0,3 [рад], то команду угла поворота колес следует установить на - 0,3+0,1 = - 0,2 [рад].
3.3.1.5. Действия водителя (Rider Operation)
3.3.1.5.1. Работа педали акселератора (Acceleration Pedal Operation)
В режиме автономного вождения ход педали акселератора исключается из выбора требований к ускорению транспортного средства.
3.3.1.5.2. Работа педали тормоза (Brake Pedal Operation)
Действие при нажатии педали тормоза. В автономном режиме целевое замедление транспортного средства выражено суммой 1) расчетного замедления от хода педали тормоза и 2) запроса замедления от системы AD.
3.3.1.5.3. Действия рычагом переключения передач (Shift_Lever_Operation)
В режиме автономного вождения управление водителем рычагом переключения передач не отражается в статусе направления движения.
При необходимости ADS подтверждает направление движения, выбранное водителем, и изменяет положение селектора передач с помощью команды направления движения.
3.3.1.5.4. Работа рулевого управления (Steering Operation)
Когда водитель осуществляет рулевое управление, выбирается максимальное из следующих значений
1) значение крутящего момента, оцененное на основании угла поворота водителем, и
2) значение крутящего момента, рассчитанное на основании запрошенного угла поворота колеса.
Следует отметить, что команда угла поворота колес не принимается, если водитель сильно поворачивает рулевое колесо. Вышеуказанное определяется флагом Steering_Wheel_Intervention (вмешательство в рулевое управление).
3.3.2. Входные данные
Таблица 3
3.3.2.1. Команда направления движения
Запрос на переключение между движением вперед (диапазон D) и назад (диапазон R)
Значения
Таблица 4
Примечания
Доступно только при Autonomy_State = «Автономный режим»
Переключение D/R возможно только на неподвижном транспортном средстве (Actual_Moving_Direction = «остановка»).
Запрос во время вождения (движения) отклоняется.
Когда система запрашивает переключение D/R, команда ускорения одновременно направляется с запросом замедления (-0,4 м/с2). (Только при включенном тормозе)
Запрос не может быть принят в следующих случаях.
Режимы ухудшения контроля направления (Direction_Control_Degradation_Modes) = «Обнаружен отказ»
3.3.2.2. Команда иммобилизации
Запрос включения/выключения блокировки колес (WheelLock)
Значения
Таблица 5
Примечания
Доступно только при Autonomy_State = «Автономный режим»
Переключение возможно только на неподвижном транспортном средстве (Actual_Moving_Direction = «остановка»)
На движущемся транспортном средстве запрос отклоняется.
Когда запрашивается изменение режима Применено/Отменено, команда ускорения устанавливается на замедление (-0,4 м/с2). (Только при включенном тормозе)
3.3.2.3. Команда остановки
Запрос неподвижности транспортного средства
Значения
Таблица 6
Примечания
Доступно только при Autonomy_State = «Автономный режим»
Подтверждается статусом остановки (Standstill Status) = «Применено».
Переход к остановке возможен только на неподвижном транспортном средстве (Actual_Moving_Direction = «остановка»)
Команда ускорения должна продолжаться до тех пор, пока статус остановки не примет значение «Применено», а запрос замедления командой ускорения (-0,4 м/с2) должен продолжаться.
Есть и другие случаи, в которых запрос не принимается. Детали уточняются.
3.3.2.4. Команда ускорения (Acceleration Command)
Команда ускорения транспортного средства
Значения
Возможность расчетного максимального замедления (Estimated_Max_Decel_Capability) на Возможность расчетного максимального ускорения ( Estimated_Max_Accel_Capability) [м/с2]
Примечания
Доступно только при Autonomy_State = «Автономный режим»
Запрос ускорения (+) и замедления (-), основанный на направлении согласно статусу направления движения (Propulsion Direction Status)
Верхний/нижний предел будет варьироваться на основании Estimated_Max_Decel_Capability и Estimated_Max_Accel_Capability.
При запросе ускорения свыше Estimated_Max_Accel_Capability запрос принимает значение Estimated_Max_Accel_Capability.
При запросе замедления свыше Estimated_Max_Decel_Capability запрос принимает значение Estimated_Max_Decel_Capability.
В зависимости от хода педали акселератора/тормоза запрошенное ускорение может не соблюдаться. Подробнее см. 3.4.1.4.
При одновременной активации системы предотвращения столкновений выбирается минимальное ускорение (максимальное замедление).
3.3.2.5. Команда угла поворота колес (Tire Turning Angle Command)
Команда угла поворота колес
Значения
Таблица 7
Примечания
Слева - положительное значение (+). Справа - отрицательное значение (-).
Доступно только при Autonomy_State = «Автономный режим»
Значение на выходе Estimated_Road_Wheel_Angle_Actual, когда транспортное средство движется по прямой, принимает опорное значение (0).
Это требует относительного значения Estimated_Road_Wheel_Angle_Actual. (подробнее см. 3.4.1.1)
Запрошенное значение находится в пределах Current_Road_Wheel_Angle_Rate_Limit.
Запрошенное значение может не соблюдаться водителем в зависимости от угла поворота.
3.3.2.6. Команда автономизации
Запрос на переключение между ручным и автономным режимом
Значения
Таблица 8
Возможно, режим не удастся переключить в автономный режим (например, в случае сбоя на платформе транспортного средства).
3.3.3. Выходные данные
Таблица 9
3.3.3.1. Статус направления движения (Propulsion Direction Status)
Текущий диапазон передач
Значения
Таблица 10
Примечания
Если диапазон передач не определен, этот выход принимает значение «Недействительное значение».
Когда во время режима VO транспортное средство переходит в следующий статус, [Propulsion Direction Status] принимает значение «P».
- [Longitudinal_Velocity] = 0 [км/ч]
- [Brake_Pedal_Position] < пороговое значение (подлежит уточнению) (если будет установлено, что педаль не нажата)
- [1st_Left_Seat_Belt_Status] = не пристегнут
- [1st_Left_Door_Open_Status] = открыто
3.3.3.2. Направление движения, выбранное водителем
Положение селектора передач, установленное водителем
Значения
Таблица 11
Примечания
Выходные данные в зависимости от положения селектора передач, установленного водителем
Если водитель снимет руку с рычага переключения передач, рычаг вернется в центральное положение, и выходные данные примут значение «Без запроса».
Когда во время режима NVO транспортное средство переходит в следующий статус, [Propulsion Direction by Driver] принимает значение «1(P)».
- [Longitudinal_Velocity] = 0 [км/ч]
- [Brake_Pedal_Position] < пороговое значение (подлежит уточнению) (если будет установлено, что педаль не нажата)
- [1st_Left_Seat_Belt_Status] = не пристегнут
- [1st_Left_Door_Open_Status] = открыто
3.3.3.3. Статус иммобилизации
Вывод статуса электрического стояночного тормоза и селектора P
Значения
<Первичный>
Таблица 12
<Вторичный>
Таблица 13
Примечания
Вторичный сигнал не включает состояние блокировки электрического стояночного тормоза.
3.3.3.4. Запрос иммобилизации от водителя
Действие водителя с переключателем электрического стояночного тормоза
Значения
Таблица 14
Примечания
«Включено» выводится при нажатии переключателя электрического стояночного тормоза.
«Отменено» выводится при втягивании переключателя электрического стояночного тормоза.
3.3.3.5. Статус остановки
Статус неподвижности транспортного средства
Значения
Таблица 15
Примечания
Электрический стояночный тормоз включается, когда статус остановки = «Применено» имеет место в течение 3 минут.
Если транспортное средство требуется запустить, ADS запрашивает команду остановки = «Отменено».
3.3.3.6. Estimated_Coasting_Rate
Оцененное замедление транспортного средства при закрытой дроссельной заслонке
Значения
[ед.изм.: м/с2]
Примечания
Оценено расчетное ускорение при WOT.
При оценке учитываются уклоны, сопротивление движению и т.д.
При статусе направления движения «D» ускорение в направлении вперед представляет собой положительное значение.
При статусе направления движения «R» ускорение в направлении назад представляет собой положительное значение.
3.3.3.7. Estimated_Max_Accel_Capability
Оцененное максимальное ускорение
Значения
[ед.изм.: м/с2]
Примечания
Определено ускорение при WOT.
При оценке учитываются уклоны, сопротивление движению и т.д.
Направление, определяемое положением селектора передач, считается положительным.
3.3.3.8. Estimated_Max_Decel_Capability
Оцененное максимальное замедление
Значения
-9,8 - 0 [ед.изм.: м/с2]
Примечания
В зависимости от Brake_System_Degradation_Modes. Детали уточняются.
На основании состоянии транспортного средства или дорожных условий, не может быть выведено в некоторых случаях
3.3.3.9. Estimated_Road_Wheel_Angle_Actual
Угол поворота передних колес
Значения
Таблица 16
Примечания
Слева - положительное значение (+). Справа – отрицательное значение (-).
До того, как станет доступным сигнал «Угол поворота колес при движении транспортного средства по прямой» этот сигнал является недействительным значением.
3.3.3.10. Estimated_Road_Wheel_Angle_Rate_Actual
Угловая скорость передних колес
Значения
Таблица 17
Примечания
Слева – положительное значение (+). Справа – отрицательное значение (-).
3.3.3.11. Steering_Wheel_Angle_Actual
Угол поворота рулевого колеса
Значения
Таблица 18
Примечания
Слева – положительное значение (+). Справа – отрицательное значение (-).
Угол поворота рулевого колеса, выведенный из угла поворота серводвигателя рулевого управления
До того, как станет доступным сигнал «Угол поворота колес при движении транспортного средства по прямой» этот сигнал является недействительным значением.
3.3.3.12. Steering_Wheel_Angle_Rate_Actual
Угловая скорость рулевого колеса
Значения
Таблица 19
Примечания
Слева – положительное значение (+). Справа – отрицательное значение (-).
Угловая скорость рулевого колеса, преобразованная из угловой скорости серводвигателя рулевого управления
3.3.3.13. Current_Road_Wheel_Angle_Rate_Limit
Предельная угловая скорость ходовых колес
Значения
При остановке: 0,4 [рад/с]
При движении: Отображение «примечаний»
Примечания
Рассчитано на основании схемы «Скорость движения транспортного средства - Угловая скорость рулевого колеса», см. ниже
A) При очень низкой скорости или в ситуации остановки используйте фиксированное значение 0,4 [рад/с].
B) При более высоких скоростях угловая скорость рулевого колеса рассчитывается на основании скорости движения транспортного средства с использованием 2,94 м/с3
Пороговое значение скорости между А и В составляет 10 [км/ч] (фиг.13).
3.3.3.14. Estimated_Max_Lateral_Acceleration_Capability
Оцененное максимальное поперечное ускорение
Значения
Фиксированное значение 2,94 [ед.изм.: м/с2]
Примечания
Контроллер угла поворота колес рассчитан на диапазон ускорения до 2,94 м/с2.
3.3.3.15. Estimated_Max_Lateral_Acceleration_Rate_Capability
Оцененное максимальное нарастание поперечного ускорения
Значения
Фиксированное значение 2,94 [ед.изм.: м/с3]
Примечания
Контроллер угла поворота колес рассчитан на диапазон ускорения до 2,94 м/с3.
3.3.3.16. Accelerator_Pedal_Position
Положение педали акселератора (насколько сильно нажата педаль?)
Значения
0-100 [ед.изм.: %]
Примечания
Чтобы ускорения не изменялось внезапно, этот сигнал фильтруется путем сглаживания.
В нормальных условиях
После калибровки нулевой точки передается сигнал положения акселератора.
В условиях отказа
Передается отказоустойчивое значение (0×FF)
3.3.3.17. Accelerator_Pedal_Intervention
Этот сигнал показывает, нажимает ли водитель на педаль акселератора (вмешательство).
Значения
Таблица 20
Примечания
Когда параметр Accelerator_Pedal_Position превысит заданное пороговое значение (ACCL_INTV), этот сигнал [Accelerator_Pedal_Intervention] примет значение «Нажата».
Если запрошенное ускорение от нажатой педали акселератора превышает ускорение, запрошенное системой (ADS, система предаварийной безопасности и т.д.), этот сигнал переходит в состояние «За пределами автономного ускорения».
В режиме NVO запрос акселератора будет отклонен. Поэтому этот сигнал не примет значение «2».
Детальное описание (фиг.14)
3.3.3.18. Brake_Pedal_Position
Положение педали тормоза (насколько сильно нажата педаль?)
Значения
0-100 [ед.изм.: %]
Примечания
При отказе датчика положения педали тормоза:
Передается отказобезопасное значение (0×FF)
Вследствие ошибки сборки это значение может превысить 100%.
3.3.3.19. Brake_Pedal_Intervention
Этот сигнал показывает, нажимает ли водитель на педаль тормоза (вмешательство).
Значения
Таблица 21
Примечания
Когда параметр Brake_Pedal_Position превысит заданное пороговое значение (BRK_INTV), этот сигнал [Brake_Pedal_Intervention] примет значение «Нажата».
Если запрошенное замедление от нажатой педали тормоза превышает замедление, запрошенное системой (ADS, система предаварийной безопасности и т.д.), этот сигнал переходит в состояние «За пределами автономного замедления».
Детальное описание (фиг.15)
3.3.3.20. Steering_Wheel_Intervention
Этот сигнал показывает, поворачивает ли водитель руль (вмешательство).
Значения
Таблица 22
Примечания
В режиме «Вмешательство в рулевое управление = 1», учитывая намерения водителя, система EPS будет осуществлять рулевое управление совместно с водителем.
В режиме «Вмешательство в рулевое управление = 2», учитывая намерения водителя, система EPS будет отклонять запросы рулевого управления от комплекта автономного вождения. (Рулевое управление будет осуществляться водителем)
3.3.3.21. Shift_Lever_Intervention
Этот сигнал показывает, переключает ли водитель селектор передач (вмешательство).
Значения
Таблица 23
Примечания
НЕТ ДАННЫХ
3.3.3.22. WheelSpeed_FL, WheelSpeed_FR, WheelSpeed_RL, WheelSpeed_RR
значение скорости вращения колес
Значения
Таблица 24
Примечания
Подлежит уточнению
3.3.3.23. WheelSpeed_FL_Rotation, WheelSpeed_FR_Rotation, WheelSpeed_RL_Rotation, WheelSpeed_RR_Rotation
Направление вращения каждого колеса
Значения
Таблица 25
Примечания
После активации ЭБУ, пока направление вращения не будет зафиксировано, этот сигнал принимает значение «Вперед».
При обнаружении 2 (двух) последовательных импульсов одного направления направление вращения будет зафиксировано.
3.3.3.24. Actual_Moving_Direction
Направление вращения колеса
Значения
Таблица 26
Примечания
Этот сигнал принимает значение «Остановка», когда значения скорости вращения четырех колес равны «0» в течение постоянного времени.
Если это не так, то этот сигнал будет определяться правилом большинства из четырех WheelSpeed_Rotations.
Если более двух WheelSpeed_Rotation имеют значение «Назад», этот сигнал принимает значение «Назад».
Если более двух WheelSpeed_Rotation имеют значение «Вперед», этот сигнал принимает значение «Вперед».
Если «Вперед» и «Назад» равнозначны, этот сигнал принимает значение «Не определено».
3.3.3.25. Longitudinal_Velocity
Оцененная продольная скорость транспортного средства
Значения
Таблица 27
Примечания
Этот сигнал выводится в виде абсолютного значения.
3.3.3.26. Longitudinal_Acceleration
Оцененное продольное ускорение транспортного средства
Значения
Таблица 28
Примечания
Этот сигнал будет рассчитан по показаниям датчика скорости вращения колеса и датчика ускорения.
Когда транспортное средство движется по ровной дороге с постоянной скоростью, этот сигнал принимает значение «0».
3.3.3.27. Lateral_Acceleration
Показания датчика бокового ускорения транспортного средства
Значения
Таблица 29
Примечания
Положительное значение означает движение против часовой стрелки. Отрицательное значение означает движение по часовой стрелке.
3.3.3.28. Yawrate
Показания датчика скорости рыскания
Значения
Таблица 30
Примечания
Положительное значение означает движение против часовой стрелки. Отрицательное значение означает движение по часовой стрелке.
3.3.3.29. Autonomy_State
Статус выбора автономного или ручного режима
Значения
Таблица 31
Примечания
Исходным состоянием является ручной режим. (в состоянии «Готовность к включению» транспортное средство запускается из ручного режима)
3.3.3.30. Autonomy_Ready
Ситуация, определяющая, может ли транспортное средство перейти в автономный режим
Значения
Таблица 32
Примечания
Этот сигнал является частью условий перехода в автономный режим.
См. сводные условия.
3.3.3.31. Autonomy_Fault
Статус, возникла ли ошибка, касающаяся функциональности в автономном режиме
Значения
Таблица 33
Примечания
[Подлежит уточнению] См. другие материалы, относящиеся к кодам ошибок функциональности в автономном режиме.
[Подлежит уточнению] Необходимо учитывать условие, при котором будет разблокирован статус «Ошибка».
3.4. API для управления кузовом
3.4.1. Функции
Подлежит уточнению
3.4.2. Вводимые данные
Таблица 34
3.4.2.1. Turnsignallight_Mode_Command
Команда для управления режимом указателей поворота платформы транспортного средства
Значения
Таблица 35
Примечания
Подлежит уточнению
Детальный проект
При Turnsignallight_Mode_Command = 1 платформа транспортного средства по запросу направляет команду на левый указатель поворота.
При Turnsignallight_Mode_Command = 2 платформа транспортного средства по запросу направляет команду на правый указатель поворота.
3.4.2.2. Headlight_Mode_Command
Команда для управления режимом головного света платформы транспортного средства
Значения
Таблица 36
Примечания
Эта команда действительна, если Headlight_Driver_Input = OFF или включен автоматический режим.
Действия водителя отменяют эту команду.
Режим головного света изменяется, когда платформа транспортного средства однократно получает эту команду.
3.4.2.3. Hazardlight_Mode_Command
Команда для управления режимом аварийной сигнализации платформы транспортного средства
Значения
Таблица 37
Примечания
Действия водителя отменяют эту команду.
Аварийная сигнализация включается во время получения платформой транспортного средства команды включения.
3.4.2.4. Horn_Pattern_Command
Команда управления схемой длительности включения и длительности выключения звукового сигнала в цикле платформы транспортного средства
Значения
Таблица 38
Примечания
Предполагается, что в схеме 1 используется однократное короткое включение, в схеме 2 - многократное включение-выключение.
Подробности находятся на внутреннем обсуждении.
3.4.2.5. Horn_Number_of_Cycle_Command
Команда управления количеством циклов включения и выключения звукового сигнала на платформе транспортного средства
Значения
0~7 [-]
Примечания
Подробности находятся на внутреннем обсуждении.
3.4.2.6. Horn_Continuous_Command
Команда управления включением звукового сигнала на платформе транспортного средства
Значения
Таблица 39
Примечания
Эта команда отменяет Horn_Pattern_Command, Horn_Number_of_Cycle_Command.
Звуковой сигнал включается во время получения платформой транспортного средства команды на включение.
Подробности находятся на внутреннем обсуждении.
3.4.2.7. Windshieldwiper_Mode_Front_Command
Команда для управления передними стеклоочистителями платформы транспортного средства
Значения
Таблица 40
Примечания
Эта команда находится на внутреннем обсуждении действительности времени действия.
Эта команда действительна, если Windshieldwiper_Front_Driver_Input = OFF или включен автоматический режим.
Действия водителя отменяют эту команду.
Режим стеклоочистителя сохраняется во время получения команды платформой транспортного средства.
3.4.2.8. Windshieldwiper_Intermittent_Wiping_Speed_Command
Команда управления интервалом срабатывания стеклоочистителя в прерывистом режиме
Значения
Таблица 41
Примечания
Эта команда действительна, если Windseldwiper_Mode_Front_Status = INT.
Действия водителя отменяют эту команду.
Прерывистый режим стеклоочистителя изменяется, когда платформа транспортного средства однократно получает эту команду.
3.4.2.9. Windshieldwiper_Mode_Rear_Command
Команда управления режимом задних стеклоочистителей платформы транспортного средства
Значения
Таблица 42
Примечания
Действия водителя отменяют эту команду.
Режим стеклоочистителя сохраняется во время получения команды платформой транспортного средства.
Скорость в прерывистом режиме не изменяется.
3.4.2.10. Hvac_1st_Command
Команда для запуска/остановки управления кондиционированием воздуха на первом ряду
Значения
Таблица 43
Примечания
Кондиционер S-AM имеет функцию синхронизации.
Таким образом, для индивидуального управления 4 (четырьмя) кондиционерами (1_left/right, 2_left/right), VCIB переходит к следующей процедуре после «Готовность к включению». (Эта функция будет реализована из CV)
#1: Hvac_1st_Command = ON
#2: Hvac_2nd_Command = ON
#3: Hvac_TargetTemperature_2nd_Left_Command
#4: Hvac_TargetTemperature_2nd_Right_Command
#5: Hvac_Fan_Level_2nd_Row_Command
#6: Hvac_2nd_Row_AirOutlet_Mode_Command
#7: Hvac_TargetTemperature_1st_Left_Command
#8: Hvac_TargetTemperature_1st_Right_Command
#9: Hvac_Fan_Level_1st_Row_Command
#10: Hvac_1st_Row_AirOutlet_Mode_Command
* Интервал перед каждой командой должен составлять 200 мс и более.
* Прочие команды могут быть выполнены после #1.
3.4.2.11. Hvac_2nd_Command
Команда для запуска/остановки управления кондиционированием воздуха на втором ряду
Значения
Таблица 44
Примечания
НЕТ ДАННЫХ
3.4.2.12. Hvac_TargetTemperature_1st_Left_Command
Команда задания целевой температуры в передней левой области
Значения
Таблица 45
Примечания
НЕТ ДАННЫХ
3.4.2.13. Hvac_TargetTemperature_1st_Right_Command
Команда задания целевой температуры в передней правой области
Значения
Таблица 46
Примечания
НЕТ ДАННЫХ
3.4.2.14. Hvac_TargetTemperature_2nd_Left_Command
Команда задания целевой температуры в задней левой области
Значения
Таблица 47
Примечания
НЕТ ДАННЫХ
3.4.2.15. Hvac_TargetTemperature_2nd_Right_Command
Команда задания целевой температуры в задней правой области
Значения
Таблица 48
Примечания
НЕТ ДАННЫХ
3.4.2.16. Hvac_Fan_Level_1st_Row_Command
Команда установки скорости вентилятора переднего кондиционера
Значения
Таблица 49
Примечания
Если нужно переключить вентилятор на 0 (OFF), необходимо передать «Hvac_1st_Command = OFF».
Если нужно переключить вентилятор в автоматический режим, необходимо передать «Hvac_1st_Command = ON».
3.4.2.17. Hvac_Fan_Level_2nd_Row_Command
Команда установки скорости вентилятора заднего кондиционера
Значения
Таблица 50
Примечания
Если нужно переключить вентилятор на 0 (OFF), необходимо передать «Hvac_2nd_Command = OFF».
Если нужно переключить вентилятор в автоматический режим, необходимо передать «Hvac_2nd_Command = ON».
3.4.2.18. Hvac_1st_Row_AirOutlet_Mode_Command
Команда установки режима дефлекторов первого ряда
Значения
Таблица 51
Примечания
НЕТ ДАННЫХ
3.4.2.19. Hvac_2nd_Row_AirOutlet_Mode_Command Команда установки режима дефлекторов второго ряда
Значения
Таблица 52
Примечания
НЕТ ДАННЫХ
3.4.2.20. Hvac_Recirculate_Command
Команда задания режима рециркуляции воздуха
Значения
Таблица 53
Примечания
НЕТ ДАННЫХ
3.4.2.21. Hvac_AC_Command
Команда задания режима кондиционера
Значения
Таблица 54
Примечания
НЕТ ДАННЫХ
3.4.3. Выводимые данные
Таблица 55
3.4.3.1. Turnsignallight_Mode_Status
Статус текущего режима указателей поворота на платформе транспортного средства
Значения
Таблица 56
Примечания
В момент обнаружения отключения лампы указателя поворота статус = ON
В момент обнаружения короткого замыкания лампы указателя поворота статус = OFF
3.4.3.2. Headlight_Mode_Status
Статус текущего режима головного света на платформе транспортного средства
Значения
Таблица 57
Примечания
Нет данных
Детальный проект
В момент включения сигнала TAIL платформа автомобиля передает 1.
В момент включения сигнала Lo платформа автомобиля передает 2.
В момент включения сигнала Hi платформа автомобиля передает 4.
В момент выключения любого сигнала платформа автомобиля передает 0.
3.4.3.3. Hazardlight_Mode_Status
Статус текущего режима лампы аварийной сигнализации на платформе транспортного средства
Значения
Таблица 58
Примечания
Нет данных
3.4.3.4. Horn_Status
Статус текущего режима звукового сигнала на платформе транспортного средства
Значения
Таблица 59
Примечания
не может обнаружить никакой неисправности.
Платформа транспортного средства передает «1» во время активации команды звукового сигнала, если звуковой сигнал выключен.
3.4.3.5. Windshieldwiper_Mode_Front_Status
Статус текущего режима работы стеклоочистителя лобового стекла на платформе транспортного средства
Значения
Таблица 60
Таблица 61
Примечания
Условия режима отказа
обнаружение прерывистости сигнала
невозможность обнаружения состояний, помимо вышеупомянутого отказа.
3.4.3.6. Windshieldwiper_Mode_Rear_Status
Статус текущего режима работы стеклоочистителя заднего стекла на платформе транспортного средства
Значения
Таблица 62
Примечания
не может обнаружить никакой неисправности.
3.4.3.7. Hvac_1st_Status
Статус активации климат-системы первого ряда
Значения
Таблица 63
Примечания
НЕТ ДАННЫХ
3.4.3.8. Hvac_2nd_Status
Статус активации климат-системы второго ряда
Значения
Таблица 64
Примечания
НЕТ ДАННЫХ
3.4.3.9. Hvac_Temperature_1st_Left_Status
Статус заданной температуры в первом ряду слева
Значения
Таблица 65
Примечания
НЕТ ДАННЫХ
3.4.3.10. Hvac_Temperature_1st_Right_Status
Статус заданной температуры в первом ряду справа
Значения
Таблица 66
Примечания
НЕТ ДАННЫХ
3.4.3.11. Hvac_Temperature_2nd_Left_Status
Статус заданной температуры во втором ряду слева
Значения
Таблица 67
Примечания
НЕТ ДАННЫХ
3.4.3.12. Hvac_Temperature_2nd_Right_Status
Статус заданной температуры во втором ряду справа
Значения
Таблица 68
Примечания
НЕТ ДАННЫХ
3.4.3.13. Hvac_Fan_Level_1st_Row_Status
Статус заданной скорости вентилятора первого ряда
Значения
Таблица 69
Примечания
НЕТ ДАННЫХ
3.4.3.14. Hvac_Fan_Level_2nd_Row_Status
Статус заданной скорости вентилятора второго ряда
Значения
Таблица 70
Примечания
НЕТ ДАННЫХ
3.4.3.15. Hvac_1st_Row_AirOutlet_Mode_Status
Статус режима воздушного дефлектора первого ряда
Значения
Таблица 71
Примечания
НЕТ ДАННЫХ
3.4.3.16. Hvac_2nd_Row_AirOutlet_Mode_Status
Статус режима воздушного дефлектора второго ряда
Значения
Таблица 72
Примечания
НЕТ ДАННЫХ
3.4.3.17. Hvac_Recirculate_Status
Статус заданного режима рециркуляции воздуха
Значения
Таблица 73
Примечания
НЕТ ДАННЫХ
3.4.3.18. Hvac_AC_Status
Статус заданного режима кондиционера
Значения
Таблица 74
Примечания
НЕТ ДАННЫХ
3.4.3.19. 1st_Right_Seat_Occupancy_Status
Статус занятости 1-го сиденья слева
Значения
Таблица 75
Примечания
При наличии багажа на сиденье этот сигнал может принять значение «Занято».
3.4.3.20. 1st_Left_Seat_Belt_Status
Статус переключателя замка ремня безопасности водителя
Значения
Таблица 76
Примечания
Если сигнал статуса замка ремня безопасности водителя не установлен, передается [не определено].
Информируется ответственное лицо при использовании. (выводит «не определено = 10» в качестве начального значения)
Результат оценки пристегнут/не пристегнут должен быть передан в буфер CAN в течение 1,3 с после IG_ON или до разрешения зажигания, в зависимости от того, что произойдет раньше.
3.4.3.21. 1st_Right_Seat_Belt_Status
Статус переключателя замка ремня безопасности пассажира
Значения
Таблица 77
Примечания
Если сигнал статуса замка ремня безопасности пассажира не установлен, передается [не определено].
Информируется ответственное лицо при использовании. (выводит «не определено = 10» в качестве начального значения)
Результат оценки пристегнут/не пристегнут должен быть передан в буфер CAN в течение 1,3 с после IG_ON или до разрешения зажигания, в зависимости от того, что произойдет раньше.
3.4.3.22. 2nd_Left_Seat_Belt_Status
Статус замка ремня безопасности на 2-м сиденье слева
Значения
Таблица 78
Примечания
не может обнаружить отказ датчика.
3.4.3.23. 2nd_Right_Seat_Belt_Status
Статус замка ремня безопасности на 2-м сиденье справа
Значения
Таблица 79
Примечания
не может обнаружить никакой неисправности.
3.5. API для управления питанием
3.5.1. Функции
Подлежит уточнению
3.5.2. Входы
Таблица 80
3.5.2.1. Power_Mode_Request
Команда на управление режимом электропитания платформы транспортного средства
Значения
Таблица 81
Примечания
Что касается «запуска», рассмотрим получение этого сигнала на CAN. (См. другой материал) По существу, он основан на ISO11989-2:2016. Таким образом, этот сигнал не должен быть простым значением. В любом случае, см. другой материал.
Этот API будет отклонять следующий запрос в течение определенного времени [4000 мс] после получения запроса.
Ниже раскрыты три режима электропитания, то есть [Sleep] [Wake] [Driving Mode], управляемые через API.
[Sleep]
Состояние выключенного питания транспортного средства. В этом режиме высоковольтная батарея не подает питание, и VCIB и прочие ЭБУ VP не активированы.
[Wake]
VCIB запускается, получив питание от низковольтной батареи. В этом режиме ЭБУ помимо VCIB не запускаются, за исключением некоторых электрических ЭБУ кузова.
[Driving Mode]
Режим «Готовность к включению». В этом режиме высоковольтная батарея питает весь VP и все ЭБУ VP, включая VCIB, переходят в активное состояние.
3.5.3. Выходы
Таблица 82
3.5.3.1. Power_Mode_Status
Статус текущего режима электропитания платформы транспортного средства
Значения
Таблица 83
Примечания
После выполнения последовательности сна VCIB будет непрерывно передавать [Sleep] в качестве Power_Mode_Status в течение 3000 [мс]. После этого VCIB отключится.
3.6. API для функций безопасности
3.6.1. Функции
Подлежит уточнению
3.6.2. Входные данные
Таблица 84
3.6.3. Выходные данные
Таблица 85
3.6.3.1. Запрос операции
Запрос операции в соответствии со статусом платформы транспортного средства на ADS
Значения
Таблица 86
Примечания
Подлежит уточнению
3.6.3.2. Passive_Safety_Functions_Triggered
Сигнал распознавания столкновения
Значения
Таблица 87
Примечания
При возникновении события распознавания столкновения сигнал передается 50 раз подряд каждые 100 [мс]. Если статус распознавания столкновения изменяется до завершения передачи сигнала, передается сигнал более высокого приоритета.
Приоритет: распознавание столкновения > норма
Передача в течение 5 с независимо от обычной реакции при столкновении, поскольку система оценки разрушения транспортного средства должна направлять запрос на выключение напряжения в течение 5 с и менее после столкновения в транспортном средстве HV.
Интервал передачи составляет 100 мс в пределах допустимого времени задержки отключения подачи топлива (1 с), то есть данные могут передаваться более 5 раз. В этом случае учитывается мгновенное отключение питания.
3.6.3.3. Brake_System_Degradation_Modes
Индикация статуса Brake_System
Значения
Таблица 88
Примечания
При обнаружении отказа происходит безопасная остановка.
3.6.3.4. Propulsive_System_Degradation_Modes
Индикация статуса Powertrain_System
Значения
Таблица 89
Примечания
При обнаружении отказа происходит безопасная остановка.
3.6.3.5. Direction_Control_Degradation_Modes
Индикация статуса Direction_Control
Значения
Таблица 90
Примечания
При обнаружении отказа происходит безопасная остановка.
При обнаружении отказа команда направления движения отклоняется.
3.6.3.6. WheelLock_Control_Degradation_Modes
Индикация статуса WheelLock_Control
Значения
Таблица 91
Примечания
Первичный сигнал указывает на статус электрического стояночного тормоза, вторичный - на SBW.
При обнаружении отказа происходит безопасная остановка.
3.6.3.7. Steering_System_Degradation_Modes
Индикация статуса Steering_System
Значения
Таблица 92
Примечания
При обнаружении отказа происходит безопасная остановка.
3.6.3.8. Power_System_Degradation_Modes
[Подлежит уточнению]
3.6.3.9. Communication_Degradation_Modes
[Подлежит уточнению]
3.7. API для функций безопасности
3.7.1. Функции
Подлежит уточнению
3.7.2. Входы
Таблица 93
3.7.2.1. 1st_Left_Door_Lock_Command, 1st_Right_Door_Lock_Command, 2nd_Left_Door_Lock_Command, 2nd_Right_Door_Lock_Command
Команда для управления замком каждой двери платформы транспортного средства
Значения
Таблица 94
Примечания
Команда запирания действует только на замки ВСЕХ дверей.
Команда отпирания может отпирать только первую дверь слева или ВСЕ двери.
3.7.2.2. Central_Vehicle_Lock_Exterior_Command
Команда для управления центральным замком платформы транспортного средства.
Значения
Таблица 95
Примечания
Команда запирания действует только на замки ВСЕХ дверей.
Команда отпирания может отпирать только первую дверь слева или ВСЕ двери.
3.7.3. Выходы
Таблица 96
3.7.3.1. 1st_Left_Door_Lock_Status
Статус текущего режима замка первой двери слева на платформе транспортного средства
Значения
Таблица 97
Примечания
не может обнаружить никакой неисправности.
3.7.3.2. 1st_Right_Door_Lock_Status
Статус текущего режима замка первой двери справа на платформе транспортного средства
Значения
Таблица 98
Примечания
не может обнаружить никакой неисправности.
3.7.3.3. 2nd_Left_Door_Lock_Status
Статус текущего режима замка второй двери слева на платформе транспортного средства
Значения
Таблица 99
Примечания
не может обнаружить никакой неисправности.
3.7.3.4. 2nd_Right_Door_Lock_Status
Статус текущего режима замка второй двери справа на платформе транспортного средства
Значения
Таблица 100
Примечания
не может обнаружить никакой неисправности.
3.7.3.5. Central_Vehicle_Exterior_Locked_Status
Статус текущего режима центрального замка на платформе транспортного средства
Значения
Таблица 101
Примечания
Платформа автомобиля ссылается на статус блокировки каждой двери,
- если какая-либо дверь разблокирована, передает 0.
- если все двери заблокированы, передает 1.
3.7.3.6. Vehicle_Alarm_Status
Статус текущей сигнализации транспортного средства на платформе транспортного средства
Значения
Таблица 102
Примечания
Нет данных
3.8. API для услуги MaaS
3.8.1. Функции
Подлежит уточнению
3.8.2. Входы
Таблица 103
3.8.3. Выходы
Таблица 104
[Пример 2]
Платформа MaaS транспортного средства «Тойота»
Спецификация архитектуры
[Standard Edition #0.1]
История версий
Таблица 105
Предметный указатель
1. Общая концепция 4
1.1. Назначение этой спецификации 4
1.2. Целевое транспортное средство 4
1.3. Целевая электронная платформа 4
1.4. Определение термина 4
1.5. Предосторожности при обращении 4
1.6. Общая структура MaaS 4
1.7. Принятый процесс разработки 6
1.8. ODD (домен функционального проектирования) 6
2. Концепция безопасности 7
2.1. Схема 7
2.2. Анализ опасностей и оценка рисков 7
2.3. Распределение требований безопасности 8
2.4. Резервирование 8
3. Концепция безопасности 10
3.1. Схема 10
3.2. Предполагаемые риски 10
3.3. Противодействие рискам 10
3.3.1. Противодействие удаленной атаке 11
3.3.2. Противодействие внесению модификаций 11
3.4. Адресация информации хранения данных 11
3.5. Уязвимость адресации 11
3.6. Контракт с операционным центром 11
4. Архитектура системы 12
4.1. Схема 12
4.2. Физическая архитектура локальной сети (в транспортном средстве) 12
4.3. Структура питания 14
5. Распределение функций 15
5.1. в нормальной ситуации 15
5.2. в случае единичного отказа 16
6. Сбор данных 18
6.1. При событии 18
6.2. Постоянно 18
1. Общая концепция
1.1. Назначение этой спецификации
Этот документ является спецификацией архитектуры платформы MaaS транспортного средства Toyota и содержит схему системы на уровне транспортного средства.
1.2. Целевое транспортное средство
Данная спецификация применяется к транспортным средствам «Тойота» с электронной платформой 19ePF [вер.1 и вер.2].
Пример транспортного средства с 19ePF показан ниже.
e-Palette, Sienna, RAV4 и т.д.
1.3. Определение термина
Таблица 106
.4. Предосторожности при обращении
Это первый проект документа.
Все данные могут быть изменены. Такие изменения доводятся до сведения пользователей. Обратите внимание, что некоторые детали еще уточняются и будут обновлены позже.
2. Концепция архитектуры
2.1. Общая структура MaaS
Изображена общая структура MaaS с целевым транспортным средством (фиг.16).
Технология управления транспортным средством используется в качестве интерфейса для поставщиков технологий.
Поставщики технологий могут получить открытые API, в частности, статус транспортного средства и управление транспортным средством, необходимые для разработки автоматизированных систем вождения.
2.2. Схема архитектуры системы на транспортном средстве
Архитектура системы на транспортном средстве показана как исходное условие (фиг. 17).
Целевое транспортное средство согласно данному документу принимает физическую архитектуру использования CAN для шины между ADS и VCIB. Для реализации каждого API в данном документе кадры CAN и назначение битов отображаются в виде «карты назначения битов» в отдельном документе.
2.3. Схема архитектуры питания на транспортном средстве
Архитектура источника питания показана как исходное условие (фиг. 18).
Детали, выделенные синим, предоставляются поставщиком ADS. Детали, выделенные оранжевым, предоставляются VP.
Структура питания ADS изолирована от структуры питания VP. Кроме того, поставщик ADS должен установить резервную структуру питания, изолированную от VP.
3. Концепция безопасности
3.1. Основная концепция безопасности
Базовая концепция безопасности представлена ниже.
Стратегия безопасной остановки транспортного средства при возникновении неисправности показана ниже (фиг. 19).
1. После возникновения неисправности транспортное средство в целом выполняет «обнаружение неисправности» и «устранение последствий неисправности», после чего переходит в безопасное состояние 1.
2. Следуя командам ADS, транспортное средство в целом останавливается в безопасном месте на безопасной скорости (предположительно менее 0,2G).
Однако, в зависимости от ситуации, транспортное средство в целом при необходимости должно замедляться быстрее указанного выше замедления.
3. После остановки, во избежание проскальзывания, транспортное средство в целом переходит в безопасное состояние 2 путем активации системы иммобилизации.
Таблица 107
См. отдельный документ «Управление неисправностями», в котором описаны единичные неисправности с уведомлением и ожидаемое поведение ADS.
3.2. Резервирование
Показаны резервные функции с транспортным средством Toyota MaaS.
Платформа транспортного средства «Тойота» имеет следующие резервные функции для реализации уровня безопасности, вытекающего из анализа функциональной безопасности.
Резервное торможение
Любой единичный отказ тормозной системы не приводит к потере функциональности торможения. Тем не менее, в зависимости от локализации отказа оставшиеся функции могут оказаться не эквивалентны возможностям основной системы. На этот случай тормозная система выполнена таким образом, чтобы не допускать падения эффективности до 0,3 G и менее.
Резервное рулевое управление
Любой единичный отказ системы рулевого управления не приводит к потере функциональности рулевого управления. Тем не менее, в зависимости от локализации отказа оставшиеся функции могут оказаться не эквивалентны возможностям основной системы. На этот случай система рулевого управления выполнена таким образом, чтобы не допускать падения эффективности до 0,3 G и менее.
Резервная иммобилизация
Транспортное средство Toyota MaaS имеет две системы иммобилизации, т.е. P Lock и электрический стояночный тормоз. Следовательно, любой единичный отказ системы иммобилизации не приводит к потере функции иммобилизации. Тем не менее, в случае отказа максимальный угол наклона в статусе неподвижности менее крутой, чем при нормальном функционировании систем.
Резервное питание
Любой единичный отказ системы питания не приводит к потере функциональности питания. Тем не менее, в случае отказа первичного электроснабжения вторичная система электроснабжения в течение определенного времени продолжает подавать питание на некоторые системы.
Резервная связь
Любой единичный сбой в системе связи не приводит к потере функции связи в целом. Система, нуждающаяся в резервировании, имеет физические резервные линии связи. Подробнее см. главу «Физическая архитектура локальных сетей (на транспортном средстве)».
4. Концепция безопасности
4.1. Схема
В отношении безопасности транспортное средство Toyota MaaS принимает в качестве руководства документ по обеспечению безопасности, выпущенный компанией «Тойота».
4.2. Предполагаемые риски
Общие риски включают не только предполагаемые риски на базе e-PF, но и предполагаемые риски для транспортного средства Autono-MaaS.
Общие риски описаны ниже.
[Удаленная атака]
- На транспортное средство
Несанкционированный доступ к центру
Подмена программного обеспечения ЭБУ
ДОС-атака
Перехват трафика
Из транспортного средства
Несанкционированный доступ к другому транспортному средству
Подмена программного обеспечения центра или ЭБУ на другом транспортном средстве
ДОС-атака на центр или другое транспортное средство
Загрузка несанкционированных данных
[Внесение модификаций]
Незаконное перепрограммирование
Создание нелегального ADK
Установка несанкционированного продукта клиентом
4.3. Противодействие рискам
Меры противодействия вышеуказанным предполагаемым рискам описаны ниже.
4.3.1. Противодействие удаленной атаке
Противодействие удаленной атаке осуществляется следующим образом.
Так как комплект автономного вождения обменивается данными с операционным центром, необходимо обеспечить сквозную безопасность. Поскольку выполняется функция передачи команд управления движением, необходима многоуровневая защита в комплекте автономного вождения. Используйте защищенный микрокомпьютер или чип безопасности в комплекте автономного вождения и примите достаточные меры безопасности в качестве первого уровня защиты от внешнего доступа. Используйте другой защищенный микрокомпьютер и другой чип безопасности для обеспечения безопасности на втором уровне. (Многоуровневая защита в комплекте автономного вождения, включающая защиту в качестве первого слоя для предотвращения прямого проникновения снаружи, и защиту в качестве второго слоя ниже первого слоя)
4.3.2. Противодействие внесению модификаций
Противодействие внесению модификаций осуществляется следующим образом.
Для противодействия подделке комплекта автономного вождения выполняется аутентификация устройства и сообщений. При хранении ключа необходимо предусмотреть меры против несанкционированного вмешательства, а также сменить набор ключей для каждой пары транспортное средство - комплект автономного вождения. В качестве альтернативы в контракте должно быть предусмотрено, что операционный центр осуществляет управление, препятствующее установке несанкционированного комплекта. Для принятия мер против установки несанкционированного комплекта пользователем транспортного средства Autono-MaaS в договоре должно быть предусмотрено, что осуществляемое операционным центром управление не допускает установки несанкционированного комплекта.
Применительно к реальным транспортным средствам следует совместно выполнить анализ реальных угроз и принять меры по устранению последних уязвимостей комплекта автономного вождения во время LO.
5. Распределение функций
5.1. в нормальной ситуации
Распределение представляющих функций показано ниже (фиг. 20).
[Распределение функций]
Таблица 108
5.2. в случае единичного отказа
См. отдельный документ «Управление неисправностями», в котором описаны единичные неисправности с уведомлением и ожидаемое поведение ADS.
Несмотря на то, что варианты осуществления настоящего изобретения раскрыты выше, следует понимать, что варианты осуществления в настоящем документе приведены лишь для наглядности и ни в коем случае не являются ограничивающими. Объем настоящего описания изобретения определен формулой изобретения и включает в себя любые модификации в пределах значения и объема, эквивалентных формуле изобретения.
Реферат
Изобретение относится к транспортному средству и интерфейсу управления транспортным средством. Транспортное средство, в котором может быть установлена система автономного вождения, содержит платформу транспортного средства, осуществляющую управление транспортным средством в соответствии с командой системы автономного вождения, и интерфейс управления транспортным средством, который служит в качестве интерфейса между системой автономного вождения и платформой транспортного средства. Платформа транспортного средства передает сигнал положения педали тормоза в соответствии со степенью нажатия педали тормоза водителем, а также передает сигнал воздействия на педаль тормоза в систему автономного вождения посредством интерфейса управления транспортным средством, и сигнал воздействия на педаль тормоза указывает на то, что педаль тормоза нажата, если сигнал положения педали тормоза указывает на то, что степень нажатия превышает пороговое значение, и указывает на выход за пределы автономного замедления транспортного средства, если запрос замедления в соответствии со степенью нажатия превышает запрос замедления от системы. Достигается своевременное взаимодействие системы автономного вождения и платформы транспортного средства. 2 н. и 2 з.п. ф-лы, 20 ил., 108 табл.
Формула
Документы, цитированные в отчёте о поиске
Устройство управления транспортного средства
Комментарии