Устройство обнаружения светофора и способ обнаружения светофора - RU2634852C1
Код документа: RU2634852C1
Чертежи
Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству обнаружения светофора и к способу обнаружения светофора.
Уровень техники
[0002] Обычно, что касается технологии обнаружения светофора впереди транспортного средства, когда множество светофоров находятся впереди транспортного средства, известна технология обнаружения светофора с наибольшим размером по данным изображения (например, см. патентную литературу 1).
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация японской патентной заявки № 2007-257299
Сущность изобретения
[0004] Однако в технологии, описанной в патентном документе 1, когда обзор наибольшего светофора загораживается объектом, таким как находящееся впереди транспортное средство, цель обнаружения принудительно переключается на следующий наибольший светофор, даже если загораживание является временным. Это затрудняет правильный выбор светофора для цели обнаружения в некоторых случаях.
[0005] Настоящее изобретение было реализовано, принимая во внимание вышеописанную проблему, и целью настоящего изобретения является предоставление устройства обнаружения светофора и способа обнаружения светофора, приспособленных правильно выбирать светофор для цели обнаружения на основе состояния постоянного загораживания светофора.
[0006] Устройство обнаружения светофора и способ обнаружения светофора согласно аспекту настоящего изобретения захватывают изображение окружающей обстановки посредством блока захвата изображения, установленного на транспортном средстве; оценивают местоположение светофора около транспортного средства со ссылкой на местоположение транспортного средства и картографическую информацию; задают область поиска светофора, в которой светофор, как оценивается, должен присутствовать; обнаруживают светофор, исследуя область поиска светофора по изображению; оценивают, возникает ли состояние постоянного загораживания, когда обзор светофора постоянно загораживается, в области поиска светофора; и выбирают область поиска светофора на основе состояния постоянного загораживания, когда состояние постоянного загораживания, как оценивается, должно возникать.
Краткое описание чертежей
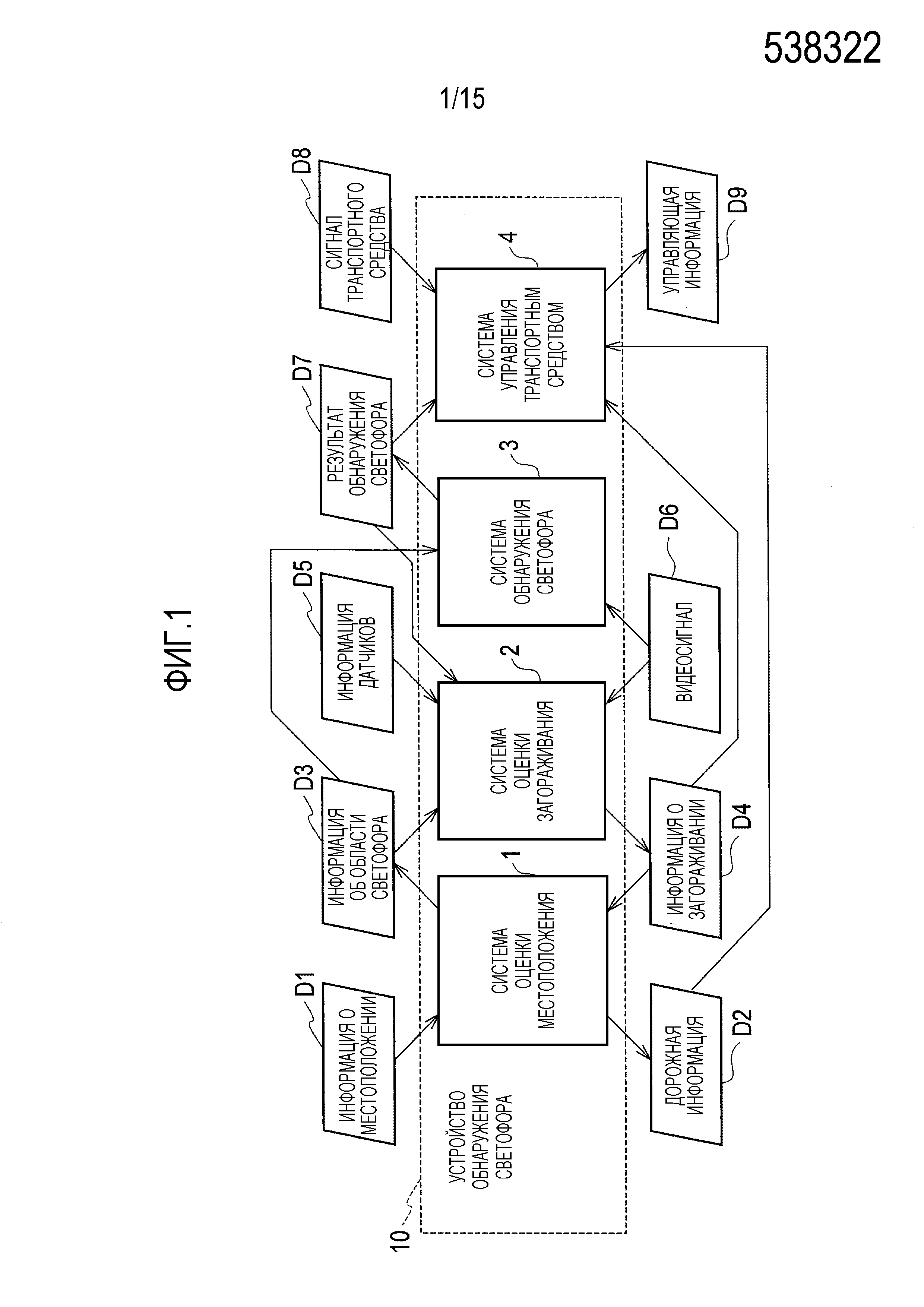
[0007] Фиг. 1 - это блок-схема, которая показывает пример конфигурации устройства обнаружения светофора согласно варианту осуществления настоящего изобретения.
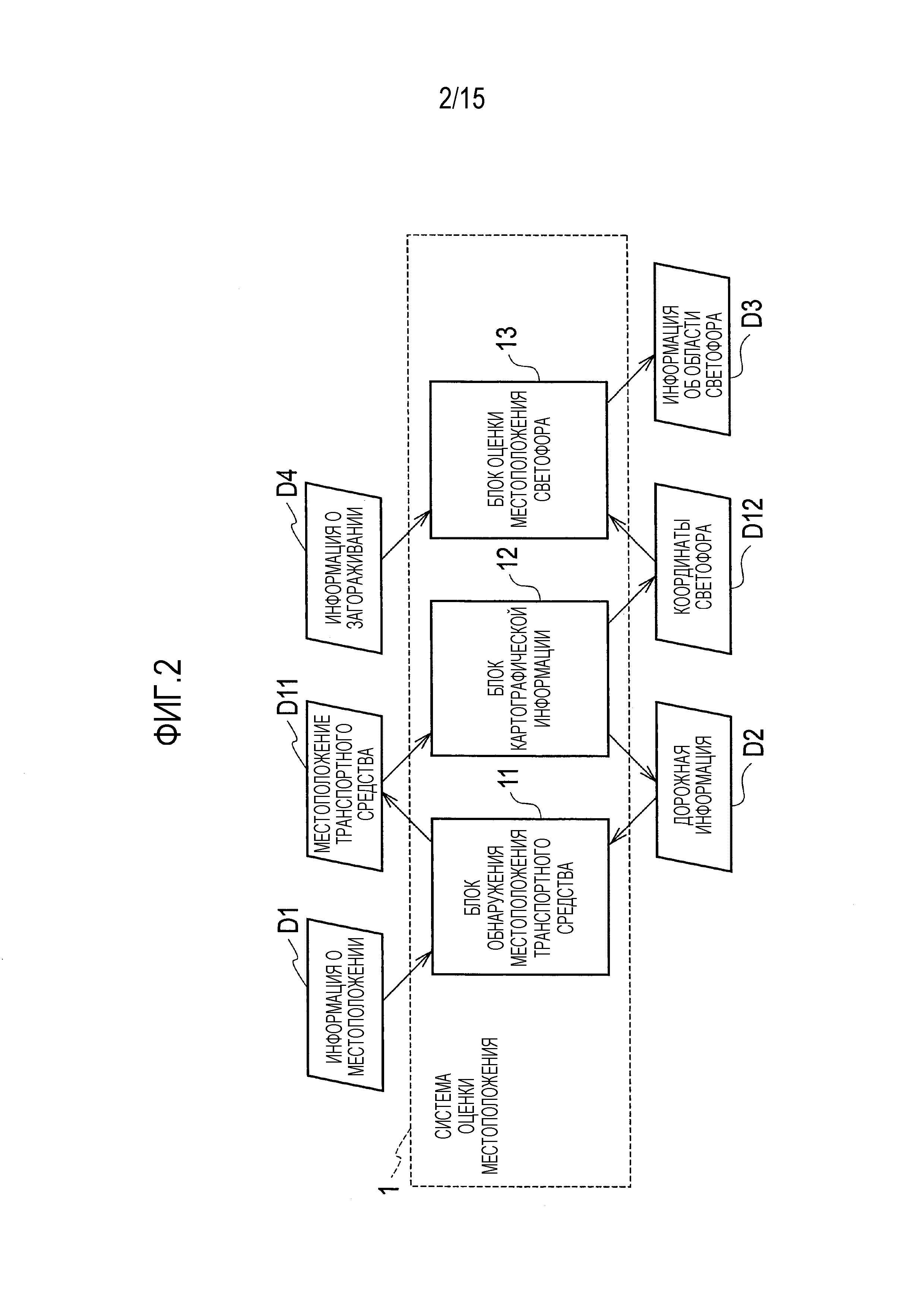
Фиг. 2 - это блок-схема, которая показывает пример конфигурации системы оценки местоположения согласно варианту осуществления настоящего изобретения.
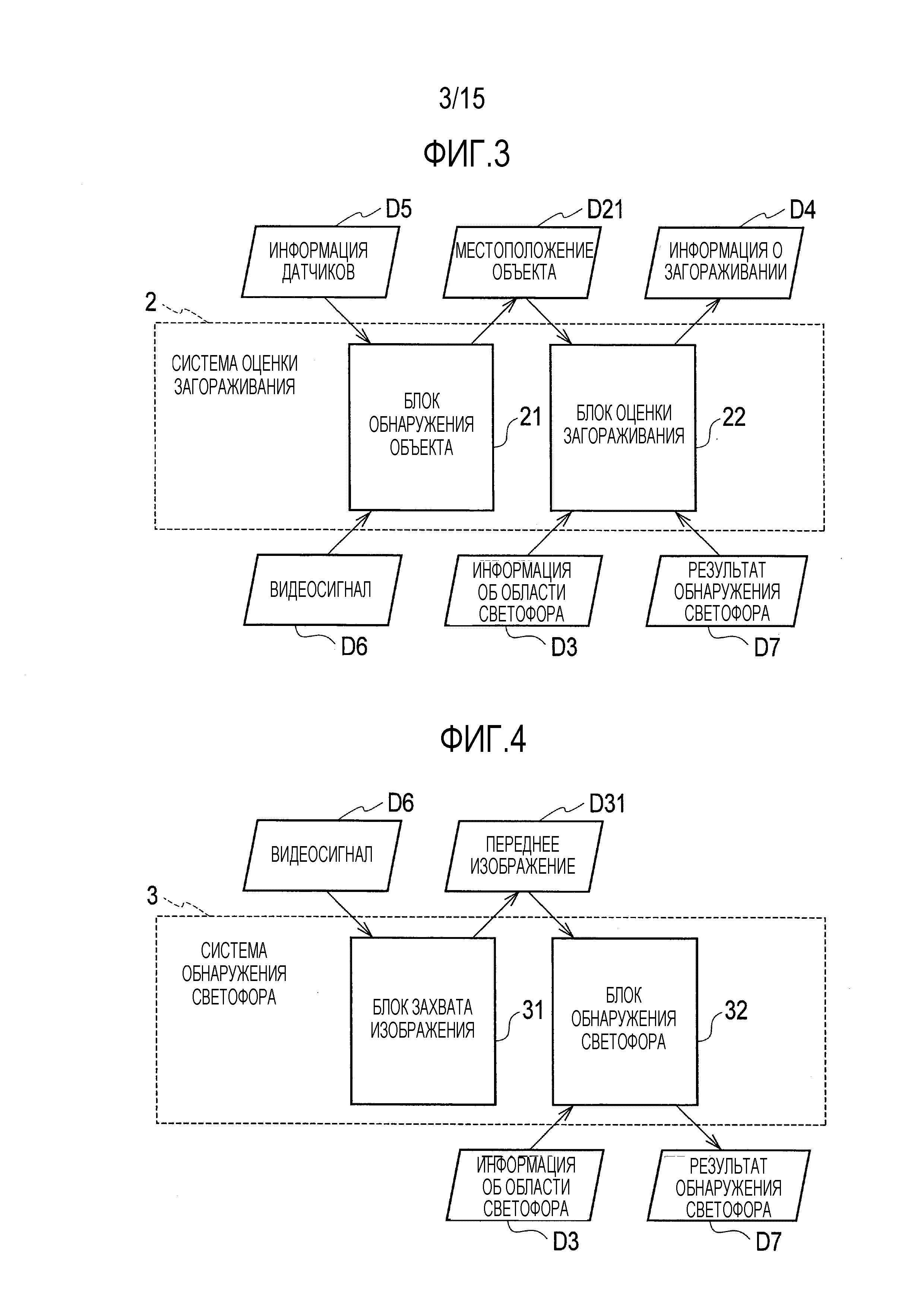
Фиг. 3 - это блок-схема, которая показывает пример конфигурации системы оценки загораживания согласно варианту осуществления настоящего изобретения.
Фиг. 4 - это блок-схема, которая показывает пример конфигурации системы обнаружения светофора согласно варианту осуществления настоящего изобретения.
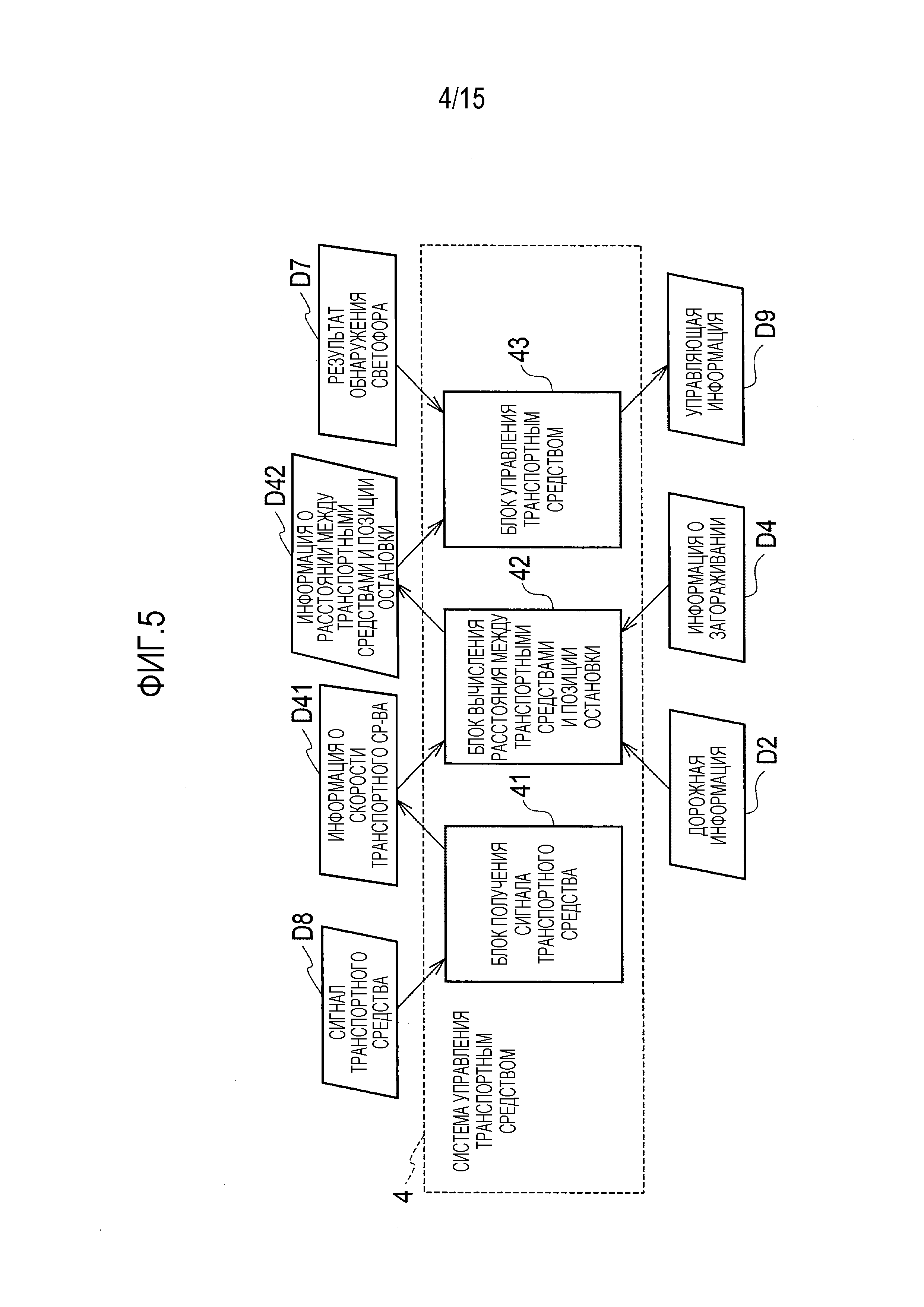
Фиг. 5 - это блок-схема, которая показывает пример конфигурации системы управления транспортным средством согласно варианту осуществления настоящего изобретения.
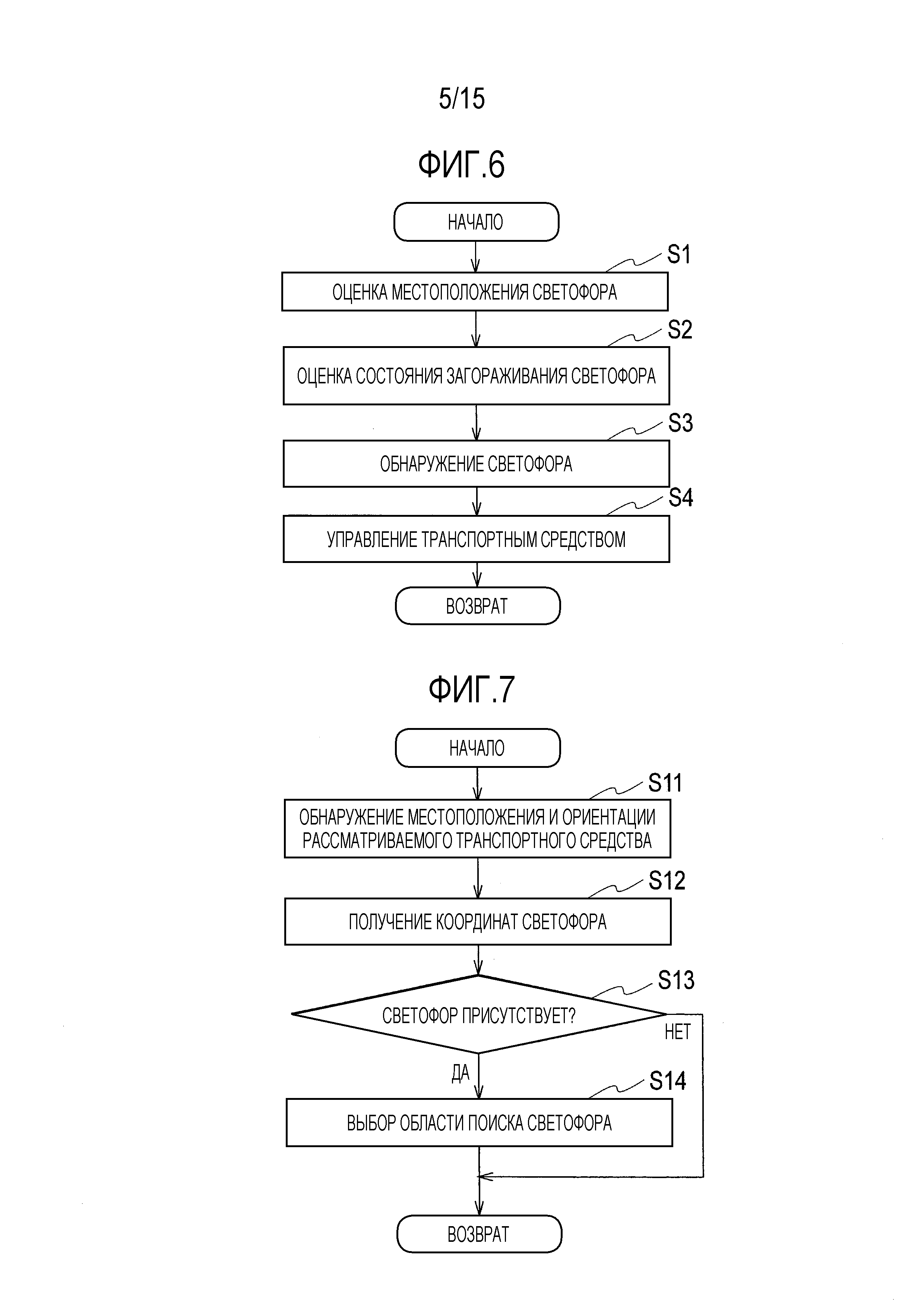
Фиг. 6 - это блок-схема последовательности операций, которая показывает пример способа обнаружения светофора согласно варианту осуществления настоящего изобретения.
Фиг. 7 - это блок-схема последовательности операций, которая показывает пример процесса оценки местоположения светофора согласно варианту осуществления настоящего изобретения.
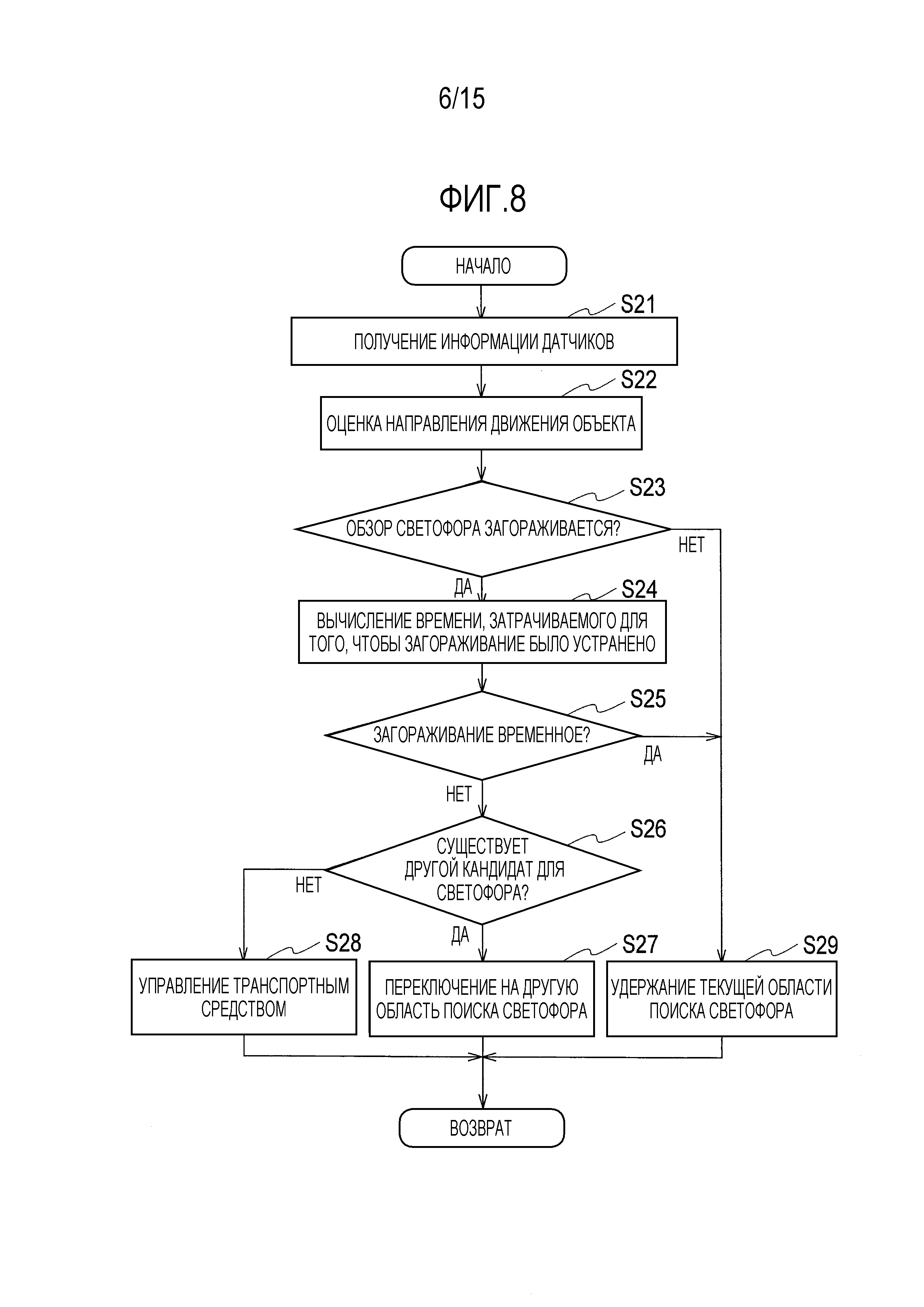
Фиг. 8 - это блок-схема последовательности операций, которая показывает пример процесса оценки загораживания согласно варианту осуществления настоящего изобретения.
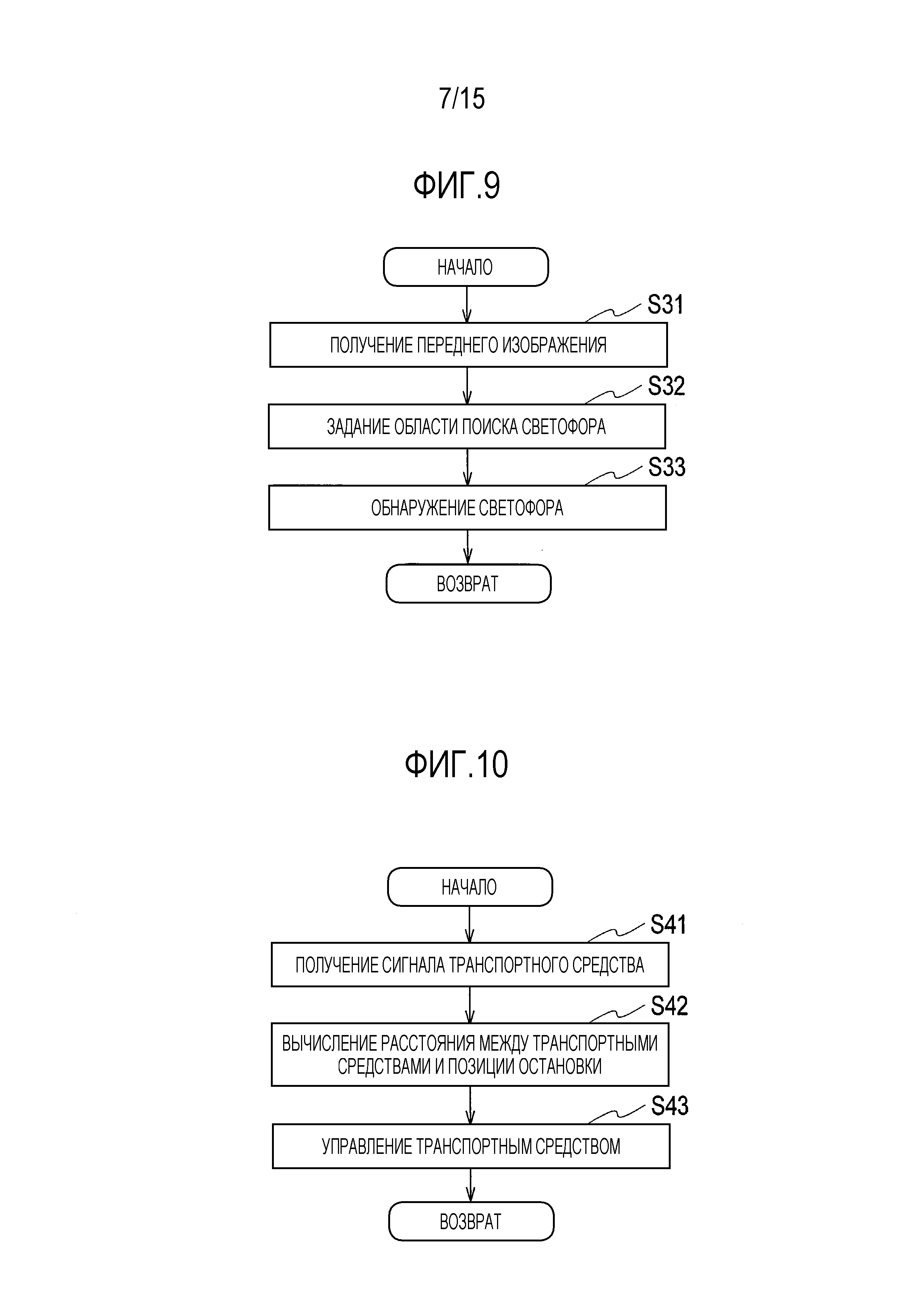
Фиг. 9 - это блок-схема последовательности операций, которая показывает пример процесса обнаружения светофора согласно варианту осуществления настоящего изобретения.
Фиг. 10 - это блок-схема последовательности операций, которая показывает пример процесса управления транспортным средством согласно варианту осуществления настоящего изобретения.
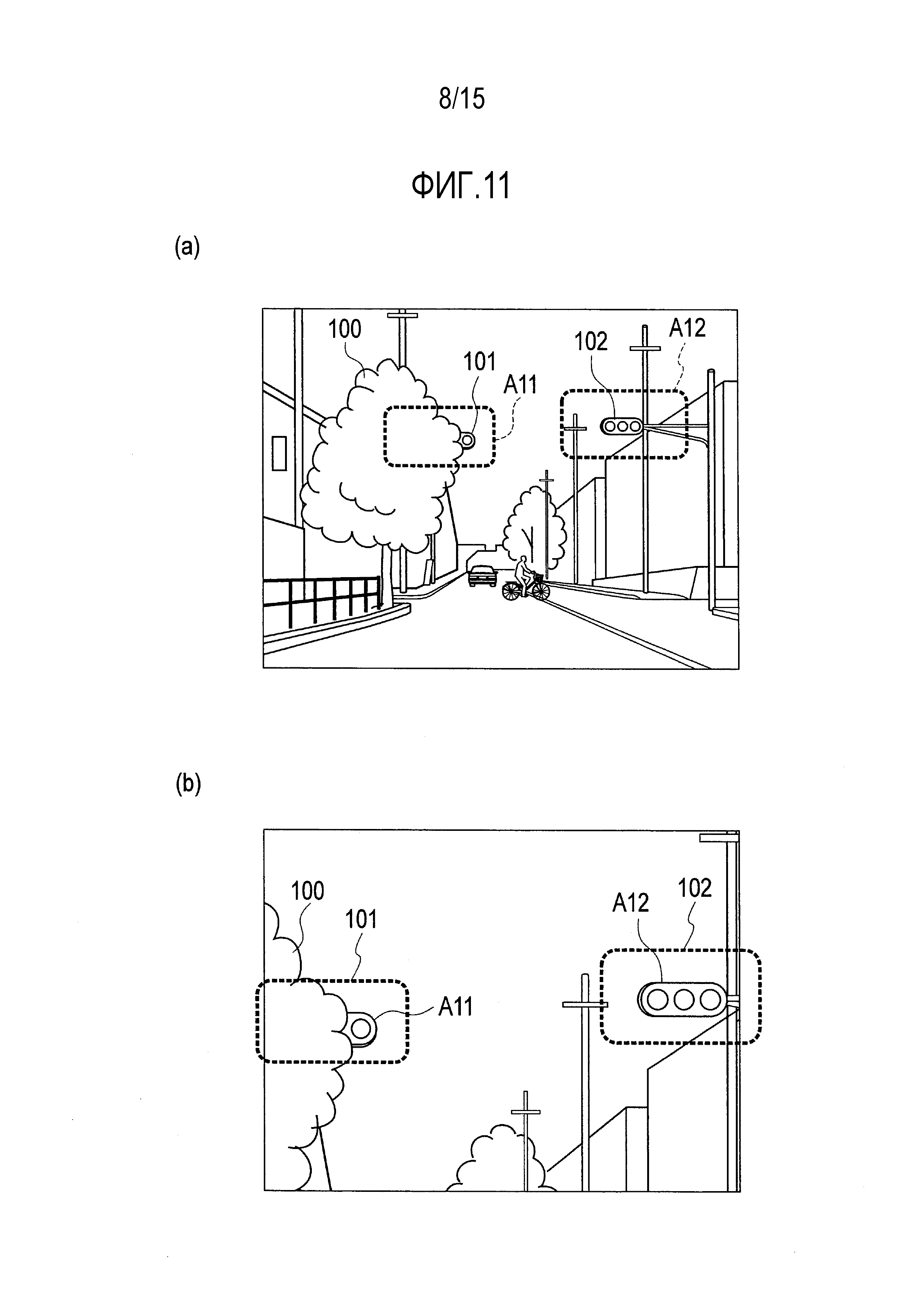
Фиг. 11(a) и фиг. 11(b), каждая, показывают схематичный вид, который показывает пример временного изменения переднего изображения согласно первому примеру настоящего изобретения.
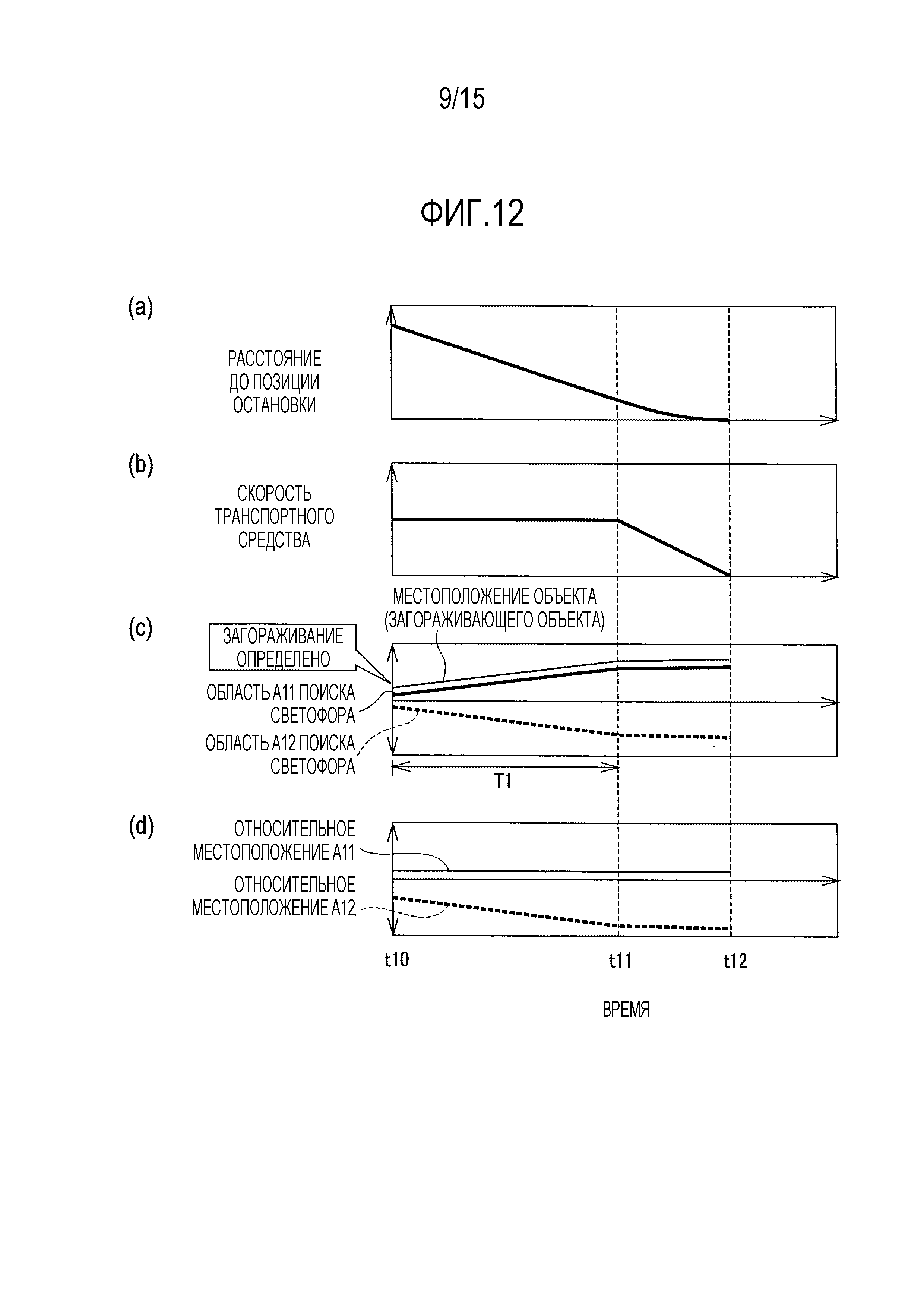
Фиг. 12(a) - это временная диаграмма, которая показывает временное изменение расстояния до позиции остановки согласно первому примеру настоящего изобретения. Фиг. 12(b) - это временная диаграмма, которая показывает примерное изменение скорости транспортного средства согласно первому примеру настоящего изобретения. Фиг. 12(c) - это временная диаграмма, которая показывает временные изменения местоположения объекта и местоположений областей поиска светофора согласно первому примеру настоящего изобретения. Фиг. 12(d) - это временная диаграмма, которая показывает примерные изменения относительных местоположений областей поиска светофора относительно местоположения объекта согласно первому примеру настоящего изобретения.
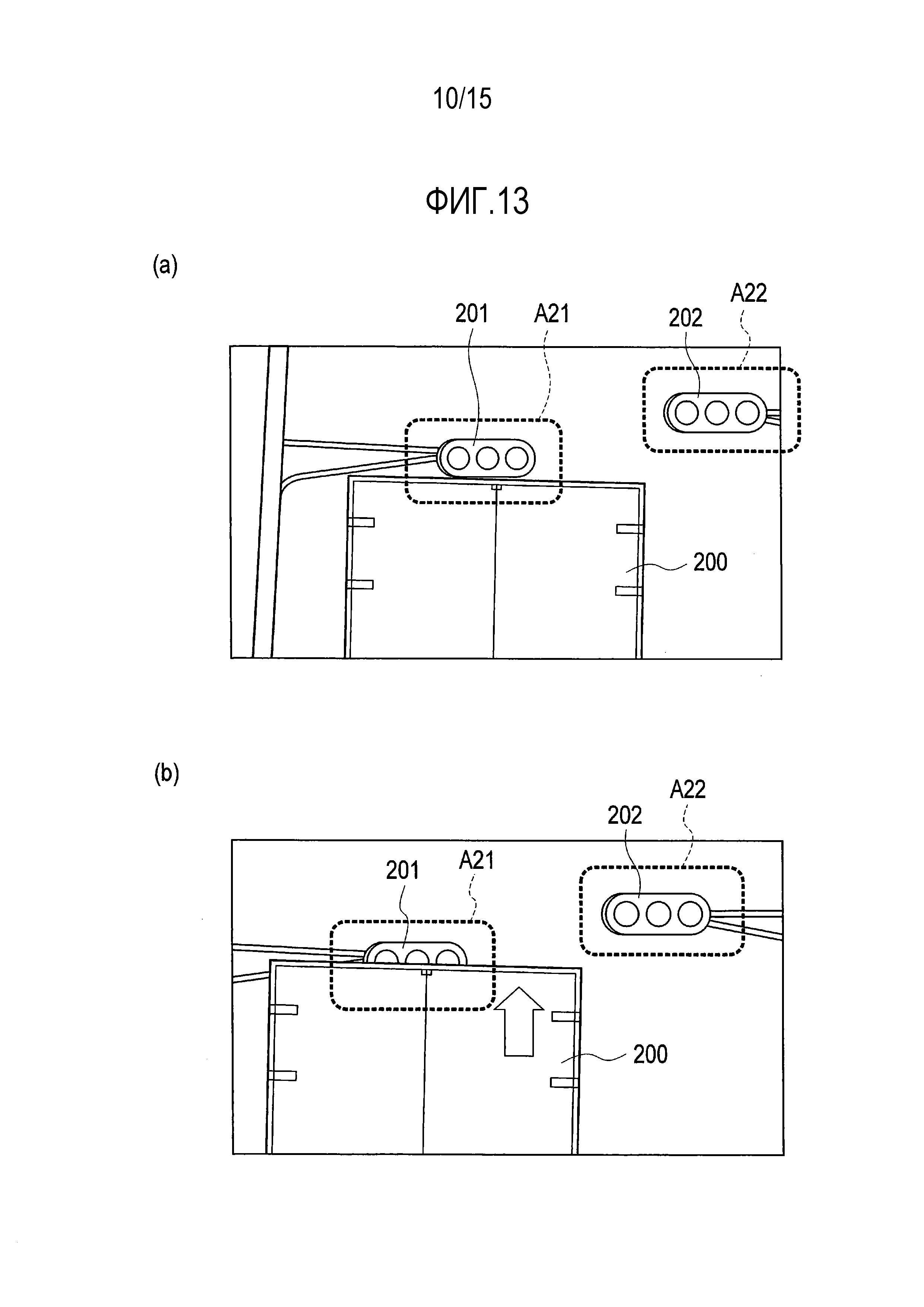
Фиг. 13(a) и фиг. 13(b), каждая, показывают схематичный вид, который показывает пример временного изменения переднего изображения согласно второму примеру настоящего изобретения.
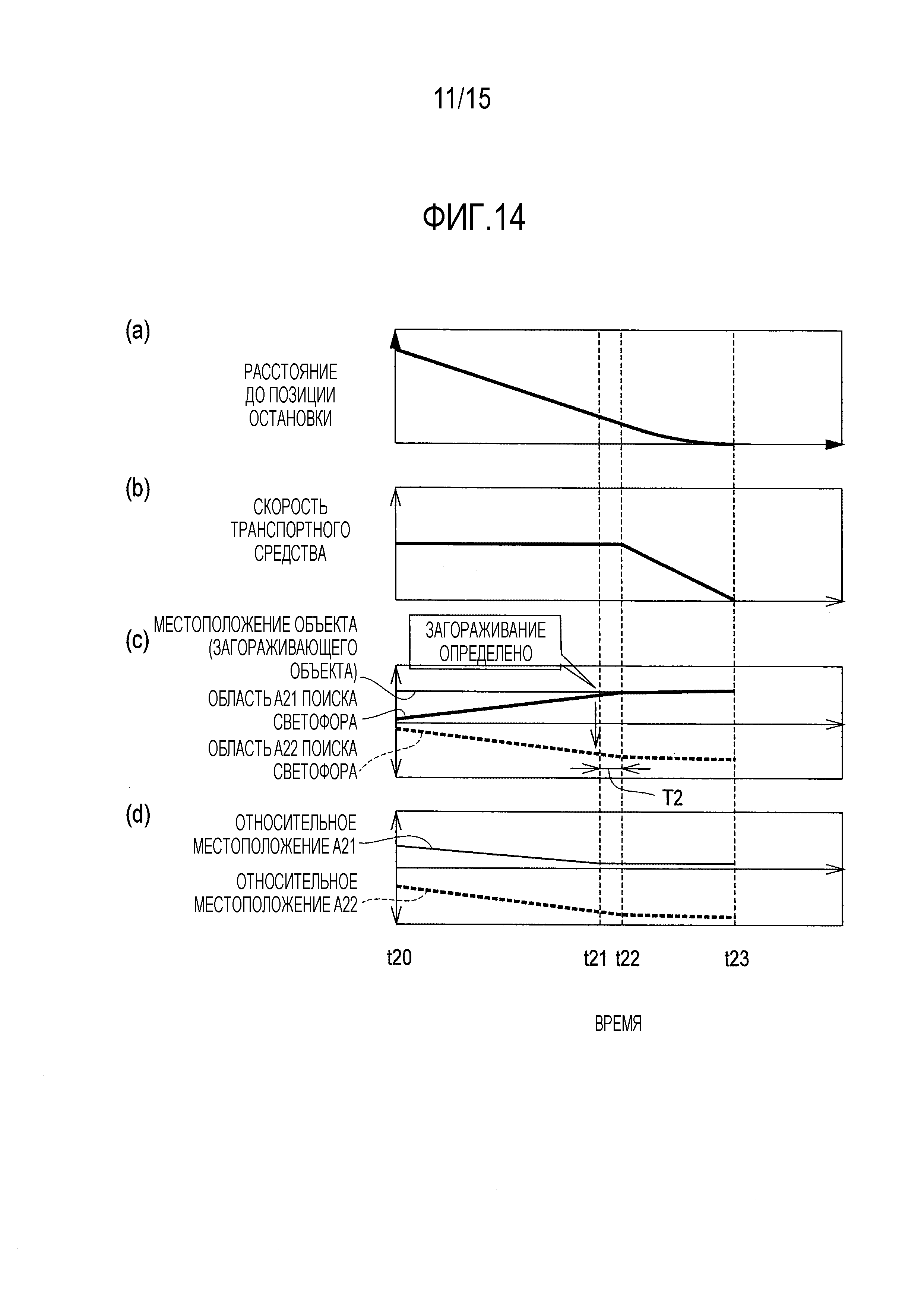
Фиг. 14(a) - это временная диаграмма, которая показывает временное изменение расстояния до позиции остановки согласно второму примеру настоящего изобретения. Фиг. 14(b) - это временная диаграмма, которая показывает примерное изменение скорости транспортного средства согласно второму примеру настоящего изобретения. Фиг. 14(c) - это временная диаграмма, которая показывает временные изменения местоположения объекта и местоположения областей поиска светофора согласно второму примеру настоящего изобретения. Фиг. 14(d) - это временная диаграмма, которая показывает примерные изменения относительных местоположений областей поиска светофора относительно местоположения объекта согласно второму примеру настоящего изобретения.
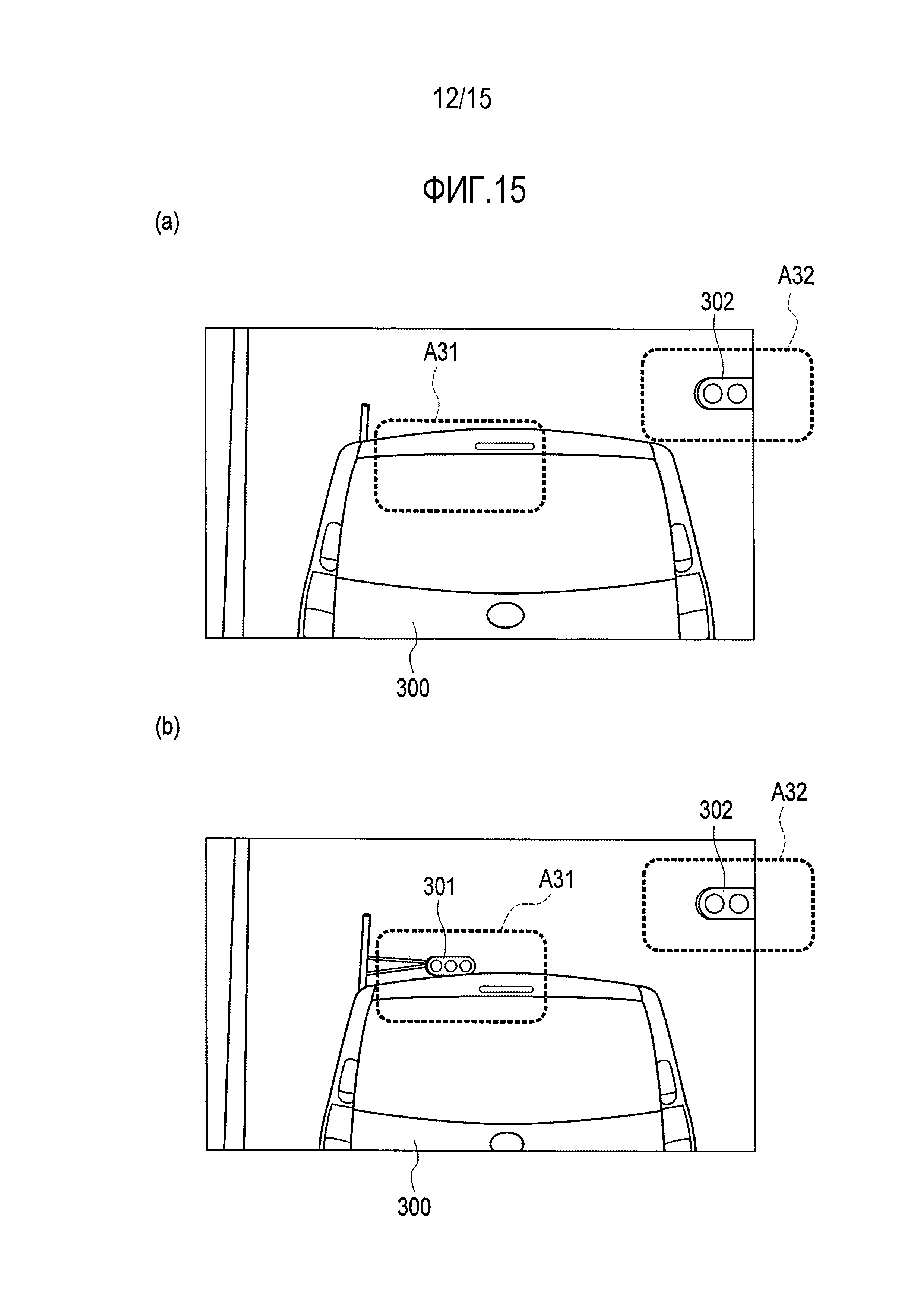
Фиг. 15(a) и фиг. 15(b), каждая, показывают схематичный вид, который показывает пример временного изменения переднего изображения согласно третьему примеру настоящего изобретения.
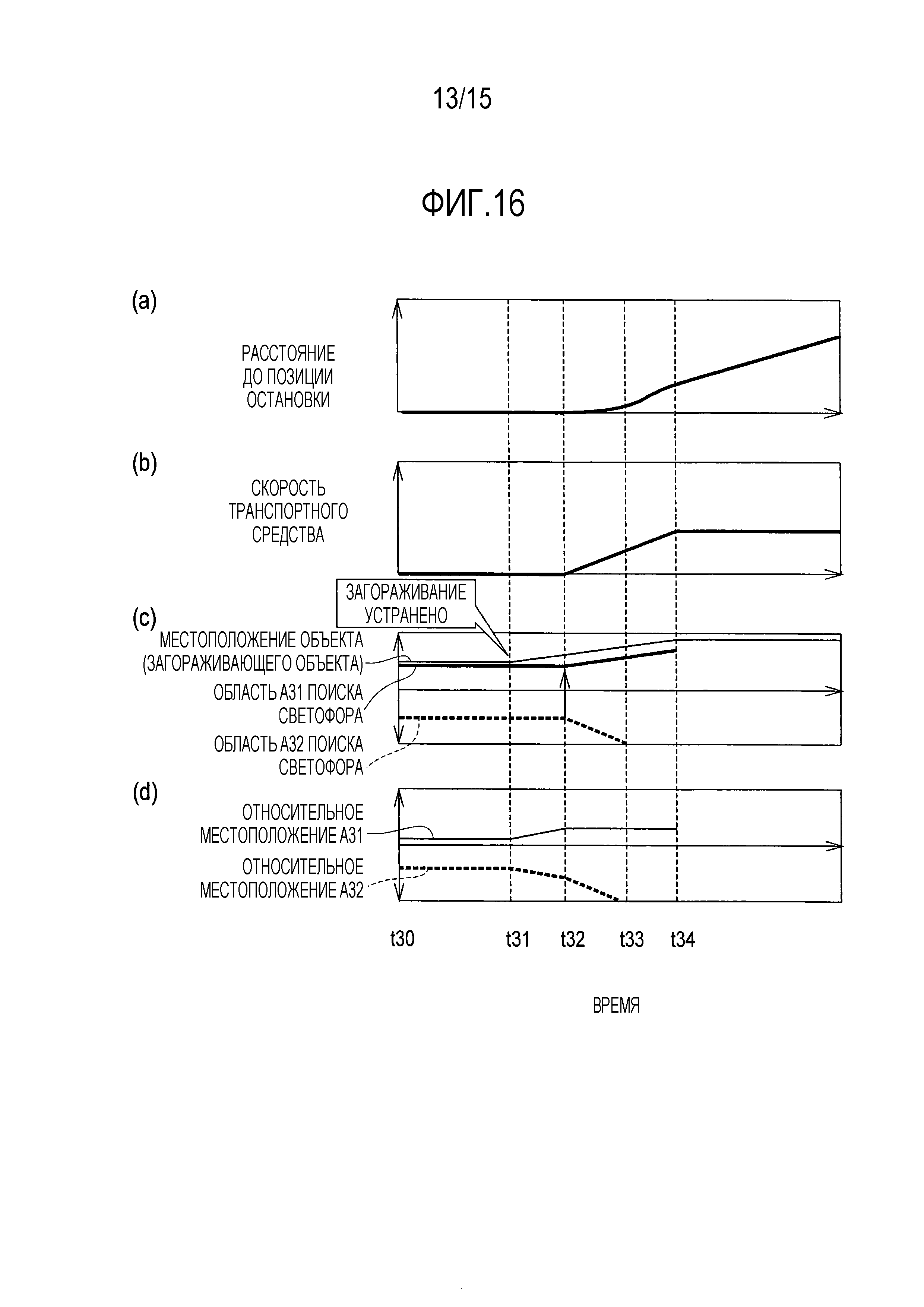
Фиг. 16(a) - это временная диаграмма, которая показывает временное изменение расстояния до позиции остановки согласно третьему примеру настоящего изобретения. Фиг. 16(b) - это временная диаграмма, которая показывает примерное изменение скорости транспортного средства согласно третьему примеру настоящего изобретения. Фиг. 16(c) - это временная диаграмма, которая показывает временные изменения местоположения объекта и местоположения областей поиска светофора согласно третьему примеру настоящего изобретения. Фиг. 16(d) - это временная диаграмма, которая показывает временные изменения относительных местоположений областей поиска светофора относительно местоположения объекта согласно третьему примеру настоящего изобретения.
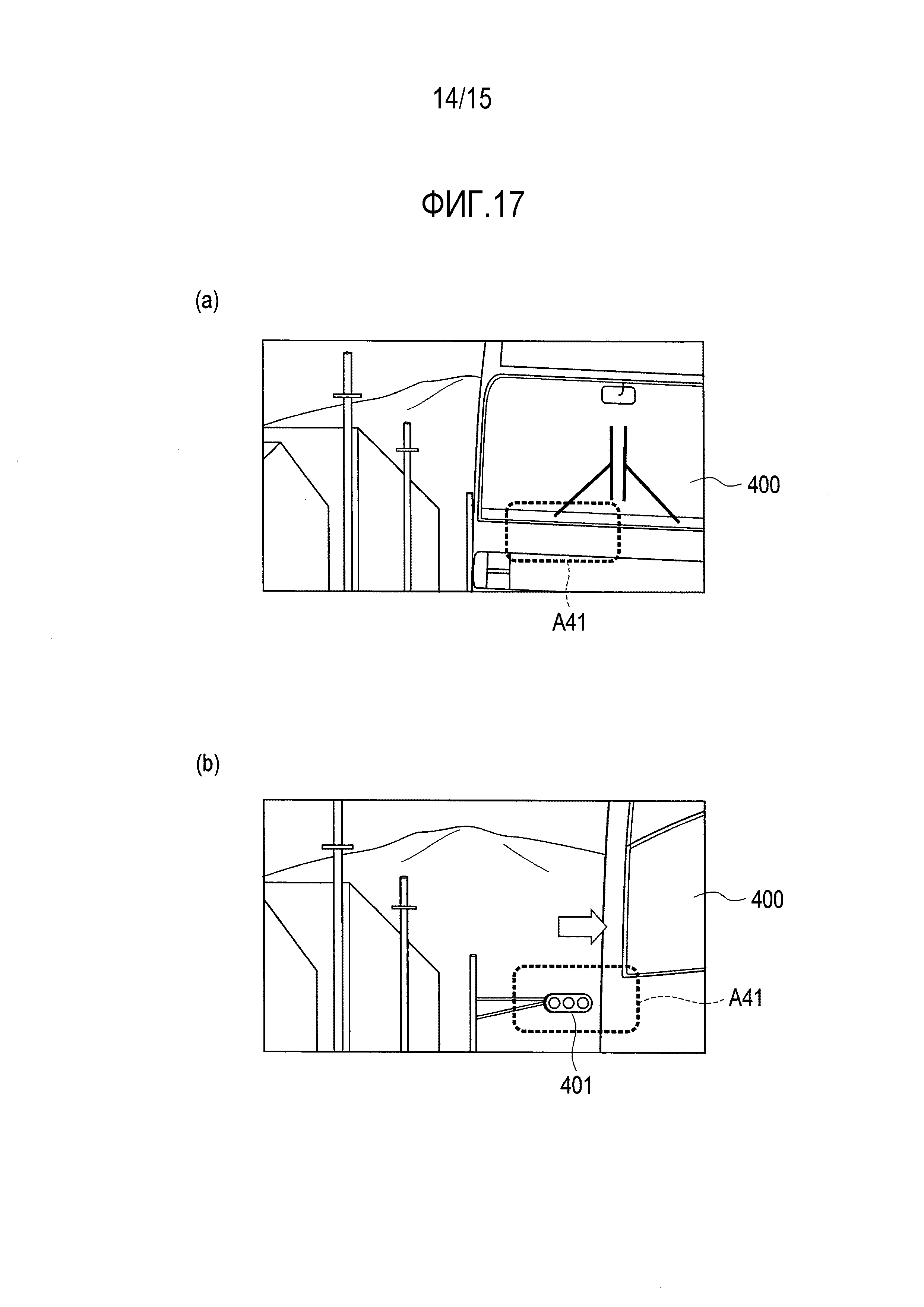
Фиг. 17(a) и фиг. 17(b), каждая, показывают схематичный вид, который показывает пример временного изменения переднего изображения согласно четвертому примеру настоящего изобретения.
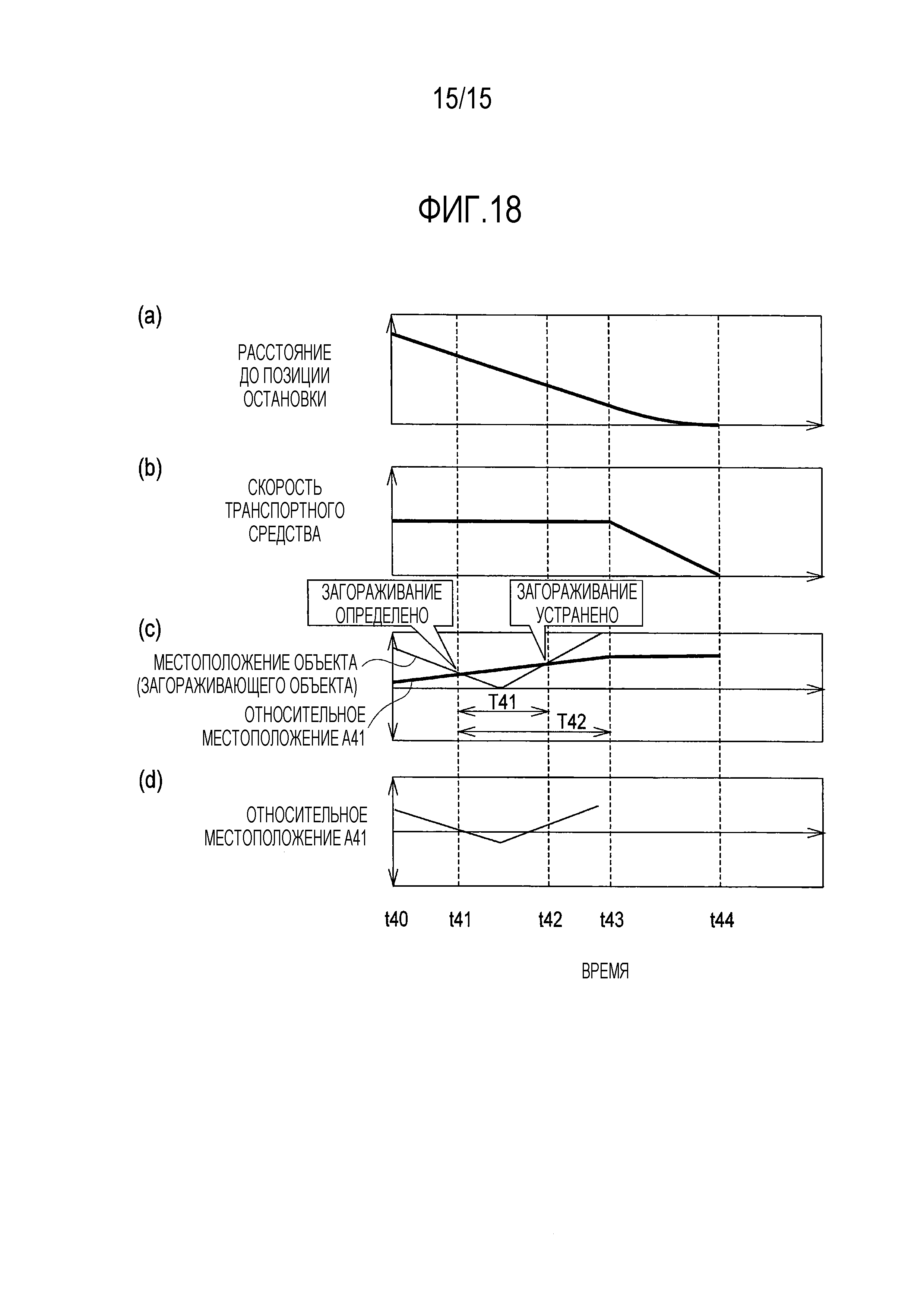
Фиг. 18(a) - это временная диаграмма, которая показывает временное изменение расстояния до позиции остановки согласно четвертому примеру настоящего изобретения. Фиг. 18(b) - это временная диаграмма, которая показывает временное изменение скорости транспортного средства согласно четвертому примеру настоящего изобретения. Фиг. 18(c) - это временная диаграмма, которая показывает временные изменения местоположения объекта и местоположения области поиска светофора согласно четвертому примеру настоящего изобретения. Фиг. 18(d) - это временная диаграмма, которая показывает временные изменения относительного местоположения области поиска светофора относительно местоположения объекта согласно четвертому примеру настоящего изобретения.
Описание вариантов осуществления
[0008] Вариант осуществления настоящего изобретения описывается со ссылкой на чертежи. Одинаковые части обозначаются одинаковыми позиционными обозначениями на чертежах, и их описания опускаются.
[0009] [Устройство обнаружения светофора]
Устройство 10 обнаружения светофора согласно варианту осуществления настоящего изобретения может быть применено к транспортному средству, приспособленному к автоматическому движению. Как показано на фиг. 1, устройство 10 обнаружения светофора согласно варианту осуществления настоящего изобретения включает в себя систему 1 оценки местоположения, систему 2 оценки загораживания, систему 3 обнаружения светофора и систему 4 управления транспортным средством.
[0010] Система 1 оценки местоположения, система 2 оценки загораживания, система 3 обнаружения светофора и система 4 управления транспортным средством могут быть реализованы с помощью микроконтроллера и т.п., который, главным образом, включает в себя центральный процессор (CPU), память и блок ввода/вывода. CPU функционирует в качестве множества блоков 1-4 обработки информации, исполняя компьютерную программу, установленную заранее. Отметим, что микроконтроллер может быть использован также для электронного блока управления (ECU), используемого для автоматического управления движением транспортного средства.
[0011] Информация D1 о местоположении, которая включает в себя местоположение рассматриваемого транспортного средства, полученная от системы глобального позиционирования (GPS) и из числа оборотов колеса, информация D4 о загораживании, которая включает в себя состояние загораживания светофора, получающееся в результате от объекта (загораживающего объекта), вводятся в систему 1 оценки местоположения. Объект, который загораживает обзор светофора, особым образом не ограничивается и может быть находящимся впереди транспортным средством, встречным транспортным средством, придорожным деревом, вывеской и дорожным знаком, например. Система 1 оценки местоположения оценивает местоположение светофора на перекрестке, к которому рассматриваемое транспортное средство приближается. Система 1 оценки местоположения выводит дорожную информацию D2, которая включает в себя расстояние от местоположения рассматриваемого транспортного средства до перекрестка, к которому рассматриваемое транспортное средство приближается, и информацию D3 об области светофора, которая относится к оцениваемому местоположению светофора.
[0012] Информация D3 об области светофора, которая выводится из системы 1 оценки местоположения; информация D5 датчиков, которая получается от различных датчиков, установленных на рассматриваемом транспортном средстве, таких как лазер, лазер миллиметрового диапазона и стереокамера; видеосигнал D6, который получается от блока захвата изображения и т.п., установленного на рассматриваемом транспортном средстве; и результат D7 обнаружения светофора, который выводится из системы 3 обнаружения светофора, вводятся в систему 2 оценки загораживания. Информация D5 датчиков включает в себя расстояние до объекта около рассматриваемого транспортного средства. Видеосигнал D6 включает в себя регулирующую информацию, такую как белая линия и желтая линия, нанесенная на дорогу. Система 2 оценки загораживания оценивает состояние загораживания светофора на перекрестке, к которому рассматриваемое транспортное средство приближается, и выводит результат оценки в качестве информации D4 о загораживании.
[0013] Информация D3 об области светофора, которая выводится из системы 1 оценки местоположения, и видеосигнал D6, который получается от блока захвата изображения и т.п., установленного на рассматриваемом транспортном средстве, вводятся в систему 3 обнаружения светофора. Система 3 обнаружения светофора обнаруживает светофор из изображения окружающей обстановки и выводит результат D7 обнаружения светофора.
[0014] Дорожная информация D2, которая выводится из системы 1 оценки местоположения, информация D4 о загораживании, которая выводится из системы 2 оценки загораживания, результат D7 обнаружения светофора, который выводится из системы 3 обнаружения светофора, и сигнал D8 транспортного средства, который включает в себя скорость транспортного средства, полученную от различных датчиков и т.п., установленных на рассматриваемом транспортном средстве, вводятся в систему 4 управления транспортным средством. Система 4 управления транспортным средством определяет способ приближения к перекрестку (способ управления транспортным средством), такой как следование за находящимся впереди транспортным средством, замедление до остановки и ускорение, и выводит способ в качестве управляющей информации D9 для управления транспортным средством.
[0015] Более конкретно, как показано на фиг. 2, система 1 оценки местоположения включает в себя блок 11 обнаружения местоположения транспортного средства, блок 12 картографической информации (картографическую базу данных) и блок 13 оценки местоположения светофора. Блок 11 обнаружения местоположения транспортного средства обнаруживает относительное местоположение и ориентацию рассматриваемого транспортного средства относительно дороги на карте на основе информации D1 о местоположении, которая включает в себя местоположение рассматриваемого транспортного средства из GPS и числа оборотов колеса, и дорожной информации D2, которая получается из картографической информации, сохраненной в блоке 12 картографической информации, и выводит обнаруженную таким образом информацию в качестве местоположения D11 транспортного средства.
[0016] Блок 12 картографической информации сохраняет картографическую информацию, включающую в себя дорожную информацию D2, в памяти заранее. На основе местоположения D11 транспортного средства, которое выводится из блока 11 обнаружения местоположения транспортного средства, блок 12 картографической информации извлекает из картографической информации координаты D12 светофора для светофора на перекрестке, к которому рассматриваемое транспортное средство приближается, а также дорожную информацию D2 для направления движения транспортного средства.
[0017] Блок 13 оценки местоположения светофора оценивает относительное местоположение светофора относительно рассматриваемого транспортного средства на основе координат D12 светофора, которые получаются от блока 12 картографической информации. Затем, на основе относительного местоположения светофора, блок 13 оценки местоположения светофора задает область, в которой высока вероятность того, что светофор присутствует, в качестве области поиска светофора. Область поиска светофора может быть задана соответствующим образом в предписанном диапазоне в зависимости от точности обнаружения и т.п. местоположения D11 транспортного средства.
[0018] Когда множество светофоров находятся на перекрестке, к которому рассматриваемое транспортное средство приближается, блок 13 оценки местоположения светофора задает область поиска светофора для каждого из множества светофоров. Кроме того, в зависимости от предписанного порядка приоритета, блок 13 оценки местоположения светофора выбирает одну или более областей поиска светофора для множества областей поиска светофора и задает выбранные таким образом области поиска светофора в качестве целевых областей обнаружения светофора. Отметим, что целевые области обнаружения светофора могут не быть выбраны посредством сужения множества областей поиска светофора в зависимости от предписанного порядка приоритета, и можно попытаться обнаружить светофор единожды из всех из множества областей поиска светофора. Области поиска светофора, в которых светофор обнаруживается, могут затем быть сужены и выбраны в качестве целевых областей обнаружения светофора.
[0019] В качестве примера предписанного порядка приоритета светофор на стороне полосы встречного транспортного средства задается имеющим приоритет над светофором на стороне полосы рассматриваемого транспортного средства. Обзор светофора на стороне полосы рассматриваемого транспортного средства вероятно должен быть загорожен постоянно находящимся впереди транспортным средством, придорожным деревом на обочине дороги и т.п. С другой стороны, обзор светофора на стороне полосы встречного транспортного средства вероятно должен быть загорожен временно только в течение короткого времени встречным транспортным средством. Следовательно, вероятность обнаружения светофора может быть улучшена посредством задания светофора на стороне полосы встречного транспортного средства имеющим приоритет.
[0020] Кроме того, что касается предписанного порядка приоритета, когда множество светофоров находятся на одной и той же стороне полосы, светофор, расположенный ближе к рассматриваемому транспортному средству, задается имеющим приоритет над светофором, более отдаленным от рассматриваемого транспортного средства. Поскольку светофор, расположенный ближе к рассматриваемому транспортному средству, показывается на изображении с более крупным размером, это упрощает обнаружение светофора.
[0021] Кроме того, во время управления для следования за находящимся впереди транспортным средством, область поиска светофора для светофора на стороне полосы встречного транспортного средства выбирается и задается предпочтительно в качестве целевой области обнаружения светофора. Во время управления для следования за находящимся впереди транспортным средством, обзор светофора на стороне полосы рассматриваемого транспортного средства загораживается постоянно находящимся впереди транспортным средством. Следовательно, эффективность обнаружения светофора может быть улучшена посредством выбора области поиска светофора для светофора на стороне полосы встречного транспортного средства. Предписанный порядок приоритета может быть задан соответствующим образом, отличным от вышеописанного. Предписанный порядок приоритета может быть сохранен в памяти заранее.
[0022] Дополнительно, блок 13 оценки местоположения светофора выбирает область поиска светофора на основе информации D4 о загораживании, которая выводится из системы 2 оценки загораживания. Например, когда обзор области поиска светофора для светофора, заданного в настоящее время, не загораживается или загораживается, но загораживание оценивается как временное и устраняемое, блок 13 оценки местоположения светофора делает выбор удержания области поиска светофора, заданной в настоящее время. С другой стороны, когда обзор области поиска светофора для светофора, заданного в настоящее время, загорожен в настоящее время или не загорожен, но оценивается как загороженный в будущем, и когда загораживание оценивается как постоянное, блок 13 оценки местоположения светофора делает выбор переключения целевой области обнаружения светофора с области поиска светофора для светофора, заданного в настоящее время, на область поиска светофора для другого светофора. Другими словами, блок 13 оценки местоположения светофора делает выбор удаления области поиска светофора, заданной в настоящее время, из целевой области обнаружения светофора и делает выбор задания области поиска светофора для другого светофора в качестве новой целевой области обнаружения светофора. Блок 13 оценки местоположения светофора выводит информацию D3 об области светофора, которая включает в себя область поиска светофора, выбранную в качестве целевой области обнаружения светофора. Отметим, что в случае, когда множество областей поиска светофора заданы в настоящее время, когда часть обзоров областей поиска светофоров загорожена в настоящее время, или они оцениваются как загороженные в будущем, и когда загораживание оценивается как постоянное, блок 13 оценки местоположения светофора может делать выбор удаления области поиска светофора, обзор которой оценивается как загороженный постоянно, из целевой области обнаружения светофора, и блок 13 оценки местоположения светофора может делать выбор удержания других областей поиска светофоров в качестве целевых областей обнаружения светофоров.
[0023] Как показано на фиг. 3, система 2 оценки загораживания включает в себя блок 21 обнаружения объекта и блок 22 оценки загораживания. Блок 21 обнаружения объекта обнаруживает объекты около транспортного средства на основе информации D5 датчиков, которая включает в себя расстояние до каждого объекта около транспортного средства, и видеосигнала D6, который включает в себя регулирующую информацию, такую как белая линия и желтая линия около транспортного средства. Находящееся впереди транспортное средство, встречное транспортное средство, придорожное дерево, вывеска, дорожный знак и т.п. считаются объектами, которые должны быть обнаружены, например. Затем, что касается обнаруженных объектов, блок 21 обнаружения объекта вычисляет относительное местоположение, направление движения и скорость движения каждого из объектов относительно рассматриваемого транспортного средства и выводит вычисленную таким образом информацию в качестве местоположения D21 объекта.
[0024] Блок 22 оценки загораживания определяет, загорожен или нет обзор области поиска светофора в настоящее время объектом, когда осматривается из рассматриваемого транспортного средства, со ссылкой на связанное с местоположением соотношение между областью поиска светофора и объектом на основе местоположения D21 объекта, которое выводится из блока 21 обнаружения объекта, и информации D3 об области светофора, которая выводится из блока 13 оценки местоположения светофора. В это время блок 22 оценки загораживания может определять, что обзор области поиска светофора загорожен, когда обзор области поиска светофора полностью загорожен объектом. Альтернативно, блок 22 оценки загораживания может определять, что обзор области поиска светофора загорожен, также когда обзор области поиска светофора частично загорожен объектом. Или альтернативно, блок 22 оценки загораживания может определять, что обзор области поиска светофора загорожен, когда результат D7 обнаружения светофора, который выводится из системы 3 обнаружения светофора, указывает неудачу в обнаружении светофора.
[0025] Дополнительно, блок 22 оценки загораживания определяет (оценивает), становится ли обзор области поиска светофора загороженным в будущем объектом, со ссылкой на относительные местоположения, направления движения и скорости движения рассматриваемого транспортного средства, области поиска светофора и объекта на основе местоположения D21 объекта, которое выводится из блока 21 обнаружения объекта, и информации D3 об области светофора, которая выводится из блока 13 оценки местоположения светофора.
[0026] Когда обзор области поиска светофора определяется как загороженный в настоящее время или станет загороженным в будущем, блок 22 оценки загораживания дополнительно определяет, является ли загораживание постоянным или временным. При постоянных загораживаниях предполагается, например, состояние, когда обзор светофора на стороне полосы рассматриваемого транспортного средства остается загороженным придорожным деревом, или случай, когда существует находящееся впереди транспортное средство, и обзор светофора на стороне рассматриваемого транспортного средства загораживается каждый раз, когда расстояние между транспортными средствами до находящегося впереди транспортного средства становится коротким, например. В качестве временного загораживания считается случай, когда встречное транспортное средство загораживает временно обзор светофора на стороне полосы встречного транспортного средства, но загораживание устраняется, когда встречное транспортное средство и рассматриваемое транспортное средство проезжают друг друга.
[0027] Для примера способа определения того, является ли загораживание постоянным или временным, блок 22 оценки загораживания вычисляет время загораживания (другими словами, время, затраченное, чтобы загораживание было устранено) области поиска светофора со ссылкой на относительные местоположения, направления движения, скорости движения и т.п. рассматриваемого транспортного средства, объект и область поиска светофора. Затем блок 22 оценки загораживания определяет, что загораживание является временным, когда вычисленное время загораживания равно или короче предписанного времени (порогового значения). С другой стороны, блок 22 оценки загораживания определяет, что загораживание является постоянным, когда вычисленное время загораживания продолжительнее предписанного времени (порогового значения). Пороговое значение для сравнения со временем загораживания может быть задано соответствующим образом посредством блока 22 оценки загораживания и т.п. Пороговое значение задается во время, в течение которого транспортное средство может замедляться и останавливаться в позиции остановки перекрестка, если время загораживания равно или короче порогового значения, например. Пороговое значение в этом случае может быть задано посредством вычисления местоположения рассматриваемого транспортного средства; расстояния до позиции остановки перекрестка; скорости транспортного средства для рассматриваемого транспортного средства; и времени, когда рассматриваемое транспортное средство должно начинать управление замедлением, от допустимой скорости замедления, например. Отметим, что, по меньшей мере, когда объект и область поиска светофора движутся в одинаковом направлении, блок 22 оценки загораживания может определять, что загораживание является постоянным.
[0028] Как показано на фиг. 4, система 3 обнаружения светофора включает в себя блок 31 захвата изображения и блок 32 обнаружения светофора. Блок 31 захвата изображения является, например, цифровой камерой, такой как CCD-камера или CMOS-камера, которая захватывает изображение обстановки около транспортного средства и получает изображение окружающей обстановки. Угол обзора блока 31 захвата изображения может быть либо фиксированным, либо регулируемым по необходимости в вертикальном направлении и горизонтальном направлении на основе видеосигнала D6 и т.п.
[0029] Блок 32 обнаружения светофора ассоциирует изображение D31, которое захватывается посредством блока 31 захвата изображения, с информацией D3 об области светофора, которая выводится из блока 13 оценки местоположения светофора и задает область поиска светофора по изображению D31. Затем блок 32 обнаружения светофора обнаруживает светофор, исследуя область поиска светофора по изображению D31. В качестве примера способа обнаружения светофора могут быть использованы синхронизированный процесс обнаружения на основе знакопеременного цикла коммерческого источника питания, процесс определения сходства оттенка и формы и другие широко известные алгоритмы. Когда блок 32 обнаружения светофора достигает цели в обнаружении светофора, блок 32 обнаружения светофора выводит результат D7 обнаружения светофора, который включает в себя цветовую информацию сигнала светофора. Когда блоку 32 обнаружения светофора не удается обнаружить светофор, блок 32 обнаружения светофора выводит результат D7 обнаружения светофора, который включает в себя то, что светофор не обнаружен.
[0030] Как показано на фиг. 5, система 4 управления транспортным средством включает в себя блок 41 получения сигнала транспортного средства, блок 42 вычисления расстояния между транспортными средствами и позиции остановки и блок 43 управления транспортным средством. Блок 41 получения сигнала транспортного средства получает сигнал D8 транспортного средства и извлекает информацию D41 о скорости транспортного средства, которая включает в себя скорость транспортного средства для рассматриваемого транспортного средства, из сигнала D8 транспортного средства.
[0031] Когда информация D4 о загораживании, которая выводится из блока 22 оценки загораживания, указывает, что находящееся впереди транспортное средство загораживает обзор области поиска светофора, блок 42 вычисления расстояния между транспортными средствами и позиции остановки вычисляет расстояние между транспортными средствами между находящимся впереди транспортным средством и рассматриваемым транспортным средством на основе информации D41 о скорости транспортного средства и т.п. Отметим, что блок 42 вычисления расстояния между транспортными средствами и позиции остановки вычисляет время, оставшееся до столкновения рассматриваемого транспортного средства с находящимся впереди транспортным средством или чем-либо, что может быть препятствием по ходу движения.
[0032] Когда позиция, в которой транспортное средство должно остановиться (позиция остановки), такая как стоп-линия, находится на следующем перекрестке, блок 42 вычисления расстояния между транспортными средствами и позиции остановки вычисляет расстояние от местоположения рассматриваемого транспортного средства до позиции остановки на основе дорожной информации D2, которая выводится из блока 12 картографической информации. Результат вычисления блока 42 вычисления расстояния между транспортными средствами и позиции остановки выводится в качестве информации D42 о расстоянии между транспортными средствами и позиции остановки.
[0033] Блок 43 управления транспортным средством выбирает способ управления транспортным средством для приближения к перекрестку на основе результата D7 обнаружения светофора, который выводится из блока 32 обнаружения светофора, и информации D42 о расстоянии между транспортными средствами и позиции остановки, которая выводится из блока 42 вычисления расстояния между транспортными средствами и позиции остановки, и затем выводит выбранный таким образом способ в качестве управляющей информации D9.
[0034] Например, даже когда информация D4 о загораживании указывает, что обзор светофора загораживается постоянно находящимся впереди транспортным средством, блок 43 управления транспортным средством делает выбор следовать за находящимся впереди транспортным средством, если определяется на основе информации D42 о расстоянии между транспортными средствами и позиции остановки, что рассматриваемое транспортное средство может останавливаться перед стоп-линией, в то время как замедляется с обычной скоростью замедления. Кроме того, блок 43 управления транспортным средством делает выбор замедления, когда информация D4 о загораживании указывает, что обзор светофора загораживается постоянно находящимся впереди транспортным средством, и определяется на основе информации D42 о расстоянии между транспортными средствами и позиции остановки, что рассматриваемое транспортное средство не может остановиться перед стоп-линией, в то время как замедляется с обычной скоростью замедления.
[0035] Кроме того, блок 43 управления транспортным средством делает выбор поддержания текущей скорости транспортного средства, когда информация D4 о загораживании указывает, что обзор светофора не загораживается, и цвет сигнала светофора, который включен в результат D7 обнаружения светофора, является синим. Кроме того, блок 43 управления транспортным средством делает выбор замедления, когда информация D4 о загораживании указывает, что обзор светофора не загораживается, цвет сигнала светофора, который включен в результат D7 обнаружения светофора, является красным, и рассматриваемое транспортное средство останавливается в позиции остановки, замедляясь с текущей скорости транспортного средства с обычной скоростью замедления. Кроме того, блок 43 управления транспортным средством делает выбор ускорения для восстановления скорости, чтобы достигать предельной скорости, когда информация D4 о загораживании указывает, что обзор светофора не загораживается, и цвет сигнала светофора, который включен в результат D7 обнаружения светофора, изменяется с красного на синий во время замедления.
[0036] Кроме того, когда информация D4 о загораживании указывает, что обзор светофора загораживается, блок 43 управления транспортным средством может выполнять управление так, что транспортное средство имеет связанное с местоположением соотношение, при котором загораживание светофора устраняется (руление или ускорение и замедление, например), на основе относительных, связанных с местоположением соотношений между рассматриваемым транспортным средством, объектом и светофором. Например, когда обзор светофора на стороне полосы рассматриваемого транспортного средства загораживается находящимся впереди транспортным средством, замедление, чтобы увеличивать расстояние между транспортными средствами до находящегося впереди транспортного средства, упрощает обнаружение светофора. Руление для перемещения либо в правую, либо в левую сторону в пределах полосы также упрощает обнаружение светофора.
[0037] [Способ обнаружения светофора]
Далее, пример способа обнаружения светофора согласно варианту осуществления настоящего изобретения описывается со ссылкой на блок-схемы последовательностей операций на фиг. 6-10. Множество процессов способа обнаружения светофора согласно варианту осуществления настоящего изобретения может выполняться в повторяющемся режиме с предписанными интервалами.
[0038] Фиг. 6 показывает общие процедуры процесса способа обнаружения светофора. На этапе S1 на фиг. 6 система 1 оценки местоположения, главным образом, оценивает местоположение светофора на перекрестке, к которому транспортное средство приближается. Подробности этого этапа показаны в блок-схеме последовательности операций на фиг. 7. На этапе S11 блок 11 обнаружения местоположения транспортного средства обнаруживает местоположение и ориентацию рассматриваемого транспортного средства на основе информации D1 о местоположении и дорожной информации D2 и выводит обнаруженную таким образом информацию в качестве местоположения D11 транспортного средства. На этапе S12, на основе местоположения D11 транспортного средства, блок 12 картографической информации выводит координаты D12 светофора, которые задаются для светофора на перекрестке, к которому транспортное средство приближается.
[0039] На этапе S13, со ссылкой на местоположение D11 транспортного средства и координаты D12 светофора, блок 13 оценки местоположения светофора определяет, присутствует или нет светофор на перекрестке, к которому транспортное средство приближается. Когда блок 13 оценки местоположения светофора определяет, что светофора не существует, процесс завершается. С другой стороны, когда блок 13 оценки местоположения светофора определяет, что светофор существует, процесс переходит к этапу S14. На этапе S14 блок 13 оценки местоположения светофора оценивает относительное местоположение светофора относительно рассматриваемого транспортного средства со ссылкой на местоположение D11 транспортного средства и координаты D12 светофора. Затем блок 13 оценки местоположения светофора задает область, в которой, как оценивается, светофор вероятно должен находиться, в качестве области поиска светофора. Кроме того, когда существует множество областей поиска светофора, блок 13 оценки местоположения светофора выбирает одну или более областей поиска светофора из множества областей поиска светофора и задает выбранные таким образом области поиска светофора в качестве целевых областей обнаружения светофоров в зависимости от предписанного порядка приоритета.
[0040] Обращаясь снова к фиг. 6, на этапе S2, система 2 оценки загораживания, главным образом, оценивает состояние загораживания светофора, вызванное объектом. Подробности этого этапа показаны в блок-схеме последовательности операций на фиг. 8. На этапе S21 блок 21 обнаружения объекта обнаруживает объекты около транспортного средства на основе информации D5 датчиков, которая включает в себя расстояние до объекта около транспортного средства, видеосигнал D6 и т.п. Затем, что касается обнаруженных объектов, блок 21 обнаружения объекта вычисляет относительное местоположение, направление движения и скорость движения каждого из объектов относительно рассматриваемого транспортного средства.
[0041] На этапе S23, на основе связанного с местоположением соотношения между областью поиска светофора и объектом, блок 22 оценки загораживания определяет, загораживается или нет обзор области поиска светофора объектом. Дополнительно, блок 22 оценки загораживания определяет, должен ли стать или нет обзор светофора загороженным посредством объекта, на основе местоположений, направлений движения и скоростей движения области поиска светофора и объекта. Когда обзор светофора определяется как незагороженный в настоящее время и в будущем, процесс переходит к этапу S29, и блок 13 оценки местоположения светофора удерживает, без переключения, область поиска светофора, заданную в настоящее время. С другой стороны, на этапе S23, когда обзор светофора определяется как загороженный в настоящее время или который должен стать загороженным, процесс переходит к этапу S24.
[0042] На этапе S24 блок 22 оценки загораживания вычисляет время, затраченное для устранения загораживания для области поиска светофора (время загораживания), на основе относительных местоположений, направлений движения и скоростей движения области поиска светофора и объекта. На этапе S25 блок 22 оценки загораживания считывает пороговое значение из памяти и определяет, равно или больше время загораживания, чем пороговое значение. Когда время загораживания равно или короче порогового значения, загораживание определяется как временное, и процесс переходит к этапу S29. Затем блок 13 оценки местоположения светофора удерживает, без переключения, область поиска светофора, заданную в настоящее время. С другой стороны, когда время, затраченное для устранения загораживания, длиннее порогового значения, загораживание определяется как постоянное, и процедура переходит к этапу S26.
[0043] На этапе S26 блок 13 оценки местоположения светофора определяет, существует или нет кандидат для другого светофора, отличного от светофора из области поиска светофора, заданной в настоящее время. Когда существует кандидат для другого светофора, процесс переходит к этапу S27, и блок 13 оценки местоположения светофора переключает цель обнаружения светофора на область поиска светофора, соответствующую другому светофору. С другой стороны, когда не существует кандидата для другого светофора на этапе S26, процесс переходит к этапу S28, и управление транспортным средством выполняется, чтобы гарантировать безопасность, даже когда обзор светофора загорожен.
[0044] Обращаясь снова к фиг. 6, на этапе S3, система 3 обнаружения светофора, главным образом, обнаруживает светофор около транспортного средства. Подробности этого этапа показаны в блок-схеме последовательности операций на фиг. 9. На этапе S31 блок 31 захвата изображения получает изображение D31. На этапе S32 блок 32 обнаружения светофора ассоциирует изображение D31 с областью поиска светофора и задает область поиска светофора по изображению D31. На этапе S33 блок 32 обнаружения светофора обнаруживает светофор, исследуя область поиска светофора по изображению D31.
[0045] Обращаясь снова к фиг. 6, на этапе S4 система 4 управления транспортным средством, главным образом, управляет транспортным средством в зависимости от состояния загораживания светофора. Подробности этого этапа показаны в блок-схеме последовательности операций на фиг. 10. На этапе S41 блок 41 получения сигнала транспортного средства получает сигнал D8 транспортного средства и извлекает информацию D41 о скорости транспортного средства, которая включена в сигнал D8 транспортного средства. На этапе S42 блок 42 вычисления расстояния между транспортными средствами и позиции остановки вычисляет расстояние между транспортными средствами между рассматриваемым транспортным средством и находящимся впереди транспортным средством и расстояние между местоположением рассматриваемого транспортного средства и позицией остановки перекрестка на основе информации D2 о транспортном средстве и т.п. На этапе S43 блок 43 управления транспортным средством выбирает способ управления транспортным средством согласно информации D4 о загораживании, результату D7 обнаружения светофора, информации D42 о расстоянии между транспортными средствами и позиции остановки и т.п. и выводит выбранную таким образом информацию в качестве управляющей информации D9. ECU, установленный в транспортном средстве, выполняет управление транспортным средством на основе управляющей информации.
[0046] [Первый пример]
Далее, в качестве первого примера настоящего изобретения, случай, когда обзор светофора загораживается постоянно придорожным деревом или вывеской рядом со светофором, описывается со ссылкой на фиг. 11 и 12.
[0047] Как показано на фиг. 11(a), светофор 101 на стороне полосы рассматриваемого транспортного средства и светофор 102 на стороне полосы встречного транспортного средства находятся на перекрестке впереди транспортного средства. Обзор области A11 поиска светофора для светофора 101 на стороне полосы рассматриваемого транспортного средства частично загораживается придорожным деревом 100 на обочине дороги. Как показано на фиг. 11(b), хотя транспортное средство переместилось вперед, область A11 поиска светофора для светофора 101 на стороне полосы рассматриваемого транспортного средства все еще загораживается постоянно придорожным деревом 100. С другой стороны, обзор области A12 поиска светофора для светофора 102 на стороне полосы встречного транспортного средства не загорожен и показан на изображении.
[0048] Принимая во внимание такую ситуацию, фиг. 12(a) показывает временное изменение расстояния до позиции остановки транспортного средства, фиг. 12(b) показывает временное изменение скорости транспортного средства, фиг. 12(c) показывает временные изменения местоположений (местоположение центра тяжести в поперечном направлении транспортного средства) объекта (придорожного дерева) 100 и областей A11 и A12 поиска светофора относительно точки схода в перспективе на переднем изображении, и фиг. 12(d) показывает временные изменения относительных местоположений (местоположения центра тяжести в поперечном направлении транспортного средства) областей A11 и A12 поиска светофора относительно объекта (придорожного дерева) 100.
[0049] Предположим, что время t10 является настоящим моментом времени, как показано на фиг. 12(c) и 12(d), блок 22 оценки загораживания определяет, что местоположения области A11 поиска светофора и придорожного дерева 100 являются близкими, и что придорожное дерево 100 загораживает обзор области A11 поиска светофора. Дополнительно, блок 22 оценки загораживания оценивает, что загораживание является постоянным, поскольку область A11 поиска светофора и придорожное дерево 100 перемещаются приблизительно в одинаковом направлении с приблизительно одинаковой скоростью, в то же время оставаясь близкими друг к другу после времени t10, и время загораживания продолжительнее предписанного времени (порогового значения) T1.
[0050] Следовательно, когда область A11 поиска светофора выбирается в качестве цели обнаружения светофора, блок 13 оценки местоположения светофора переключает цель обнаружения светофора на область A12 поиска светофора, соответствующую другому светофору 102.
[0051] Блок 32 обнаружения светофора обнаруживает светофор 102 из области A12 поиска светофора. Когда блок 32 обнаружения светофора обнаруживает, что цвет сигнала светофора 102 является красным, рассматриваемое транспортное средство начинает замедление во время t11 и останавливается в позиции остановки для перекрестка во время t12, как показано на фиг. 12(a) и 12(b).
[0052] [Второй пример]
Далее, в качестве второго примера настоящего изобретения, случай, когда обзор светофора загораживается постоянно находящимся впереди транспортным средством, описывается со ссылкой на фиг. 13 и 14.
[0053] Фиг. 13(a) является состоянием, когда рассматриваемое транспортное средство следует за находящимся впереди транспортным средством 200, и существуют светофор 201 на стороне полосы рассматриваемого транспортного средства и светофор 202 на стороне полосы встречного транспортного средства на перекрестке впереди транспортного средства. Как показано на фиг. 13(b), когда находящееся впереди транспортное средство 200 замедляется или останавливается на красный свет, расстояние между транспортными средствами между рассматриваемым транспортным средством и находящимся впереди транспортным средством 200 становится короче, вызывая более частые ситуации, когда обзор области A21 поиска светофора для светофора 201 на стороне полосы рассматриваемого транспортного средства загораживается. Это может называться состоянием постоянного загораживания.
[0054] Принимая во внимание такую ситуацию, фиг. 14(a) показывает временное изменение расстояния до позиции остановки, фиг. 14(b) показывает временное изменение скорости транспортного средства, фиг. 14(c) показывает временные изменения местоположений (местоположения центра тяжести в поперечном направлении транспортного средства) объекта (находящегося впереди транспортного средства) 200 и областей A21 и A22 поиска светофора относительно точки схода в перспективе на переднем изображении, и фиг. 14(d) показывает временные изменения относительных местоположений (местоположения центра тяжести в поперечном направлении транспортного средства) областей A21 и A22 поиска светофора относительно объекта (находящегося впереди транспортного средства) 200.
[0055] Предположим, что время t20 является настоящим моментом времени, как показано на фиг. 14(c) и 14(d), блок 22 оценки загораживания определяет, что находящееся впереди транспортное средство 200 движется так, чтобы загораживать обзор области A21 поиска светофора в будущем времени t21. Дополнительно, блок 22 оценки загораживания оценивает, что загораживание является постоянным загораживанием, вызванным находящимся впереди транспортным средством 200, поскольку оцениваемое местоположение находящегося впереди транспортного средства 200 не изменяется значительно, и время загораживания продолжительнее предписанного времени (порогового значения) T2.
[0056] Когда область A21 поиска светофора выбирается в качестве цели обнаружения светофора, блок 13 оценки местоположения светофора переключает цель обнаружения светофора на область A22 поиска светофора для светофора 202 на стороне полосы встречного транспортного средства. Отметим, что переключение с области A21 поиска светофора на область A22 поиска светофора может быть выполнено либо немедленно во время t20, либо когда обзор области A21 поиска светофора загораживается во время t21.
[0057] Блок 32 обнаружения светофора обнаруживает светофор 202 из области A22 поиска светофора, которая выбирается в качестве цели обнаружения. Когда блок 32 обнаружения светофора обнаруживает, что цвет сигнала светофора 202 является красным, рассматриваемое транспортное средство начинает замедление во время t22 и останавливается в позиции остановки для перекрестка во время t23, как показано на фиг. 14(a) и 14(b).
[0058] [Третий пример]
Далее, в качестве третьего примера настоящего изобретения, случай, когда рассматриваемое транспортное средство останавливается позади находящегося впереди транспортного средства на перекрестке, описывается со ссылкой на фиг. 15 и 16.
[0059] Фиг. 15(a) является состоянием, когда рассматриваемое транспортное средство останавливается с находящимся впереди транспортным средством 300 на перекрестке, а фиг. 15(b) - это состояние после того как находящееся впереди транспортное средство 300 начало двигаться. Как показано на фиг. 15(a) и 15(b), существуют светофор 301 на стороне полосы рассматриваемого находящегося впереди транспортного средства транспортного средства и светофор 302 на стороне полосы встречного транспортного средства.
[0060] Принимая во внимание такую ситуацию, фиг. 16(a) показывает временное изменение расстояния до позиции остановки транспортного средства, фиг. 16(b) показывает временное изменение скорости транспортного средства, фиг. 16(c) показывает временные изменения местоположения (местоположения центра тяжести) находящегося впереди транспортного средства 300 и местоположений (местоположения центра тяжести в поперечном направлении транспортного средства) областей A31 и A32 поиска светофора относительно точки схода в перспективе в переднем изображении, и фиг. 16(d) показывает временные изменения относительных местоположений (местоположения центра тяжести в поперечном направлении транспортного средства) областей A31 и A32 поиска светофора относительно находящегося впереди транспортного средства 300.
[0061] Как показано на фиг. 16(a) и 16(b), в течение времени от времени t30 до времени t31, рассматриваемому транспортному средству запрещается начинать движение, в то время как рассматриваемое транспортное средство и находящееся впереди транспортное средство 300 остановлены. Кроме того, предполагается, что область A32 поиска светофора выбирается в качестве цели обнаружения светофора заранее.
[0062] Как показано на фиг. 16(c) и 16(d), во время t31, блок 22 оценки загораживания определяет, что находящееся впереди транспортное средство 300 начало движение, и загораживание обзора области A31 поиска светофора было устранено. После этого, как показано на фиг. 16(a) и 16(d), рассматриваемое транспортное средство начинает двигаться во время t32.
[0063] Как показано на фиг. 16(c) и 16(d), во время t33, область A32 поиска светофора находится за пределами угла обзора. Следовательно, во время t32 перед временем t33, целевая область обнаружения светофора переключается и устанавливается с области A32 поиска светофора на область A31 поиска светофора, загораживание для которой было устранено.
[0064] [Четвертый пример]
Далее, в качестве четвертого примера настоящего изобретения, случай, когда обзор светофора загораживается временно встречным транспортным средством и т.п., описывается со ссылкой на фиг. 17 и 18.
[0065] Фиг. 17(a) показывает ситуацию, когда существует встречное транспортное средство 400, которое загораживает обзор области A41 поиска светофора, а фиг. 17(b) показывает ситуацию, когда рассматриваемое транспортное средство и встречное транспортное средство 400 движутся таким образом, чтобы проезжать друг друга, в результате чего, светофор 401, соответствующий области A41 поиска светофора, показывается.
[0066] Принимая во внимание такую ситуацию, фиг. 18(a) показывает временное изменение расстояния до позиции остановки транспортного средства, фиг. 18(b) показывает временное изменение скорости транспортного средства, фиг. 18(c) показывает временные изменения местоположений (местоположения центра тяжести в поперечном направлении транспортного средства) объекта (встречного транспортного средства) 400 и области A41 поиска светофора относительно точки схода в перспективе на переднем изображении, и фиг. 18(d) показывает временное изменение относительного местоположения (местоположения центра тяжести в поперечном направлении транспортного средства) области A41 поиска светофора относительно объекта (встречного транспортного средства) 400.
[0067] Предположим, что время t40 является настоящим моментом времени, как показано на фиг. 18(c) и 18(d), блок 22 оценки загораживания оценивает, что встречное транспортное средство 400 движется так, чтобы загораживать обзор области A41 поиска светофора в будущем времени t41.
[0068] Дополнительно, блок 22 оценки загораживания вычисляет время T41 загораживания со ссылкой на направление движения и скорость движения встречного транспортного средства 400 относительно области A41 поиска светофора. Затем блок 22 оценки загораживания сравнивает время T41 загораживания с предписанным временем (пороговым значением) T42, которое необходимо для замедления и остановки транспортного средства. Поскольку время T41 загораживания равно или короче предписанного времени T42, загораживание оценивается как временное.
[0069] Блок 13 оценки местоположения светофора удерживает область A41 поиска светофора, заданную в настоящее время, и ожидает, чтобы загораживание обзора области A41 поиска светофора было устранено, даже если существует кандидат для другого светофора на том же перекрестке. Когда загораживание устраняется во время t42, блок 32 обнаружения светофора исследует область A41 поиска светофора и обнаруживает светофор.
[0070] [Полезный результат настоящего изобретения]
Согласно варианту осуществления настоящего изобретения, область поиска светофора для цели обнаружения светофора может быть правильно выбрана посредством оценки состояния загораживания светофора, вызванного объектом в настоящем и в будущем, и посредством выбора и задания области поиска светофора на основе оцененного состояния загораживания. В результате светофор на перекрестке может быть обнаружен с высокой точностью.
[0071] Кроме того, посредством оценки времени загораживания светофора, когда обзор светофора загораживается в настоящее время или станет загороженным в будущем, и удержания области поиска светофора, заданной в текущий момент, когда оцениваемое время загораживания равно или короче порогового значения, светофор может быть обнаружен, после того как временное загораживание устраняется, и не допускается ненужное переключение области поиска светофора. В результате нагрузка устройства 10 обнаружения светофора может быть снижена.
[0072] Кроме того, когда множество светофоров присутствуют около транспортного средства, и оцениваемое время загораживания продолжительнее порогового значения, представляется возможным правильно выбирать область поиска светофора, в которой светофор может быть обнаружен, переключая область поиска светофора, заданную в текущий момент, на область поиска светофора для другого светофора.
[0073] Кроме того, из множества светофоров, область поиска светофора для светофора, который обнаруживается раньше других, может быть правильно выбрана посредством задания порядка приоритета со ссылкой на связанные с местоположением соотношения между транспортным средством и множеством светофоров и выбора области поиска светофора для другого светофора в порядке приоритета.
[0074] Кроме того, во время управления для следования за находящимся впереди транспортным средством, эффективность обнаружения светофора может быть улучшена посредством выбора области поиска светофора для светофора на стороне полосы встречного транспортного средства.
[0075] Кроме того, светофор может быть обнаружен раньше посредством выполнения управления так, что транспортное средство имеет связанное с местоположением соотношение, в котором загораживание светофора устранено, на основе относительных связанных с местоположением соотношений между рассматриваемым транспортным средством, объектом и светофором.
[0076] Как указано выше, описывается вариант осуществления настоящего изобретения. Однако, не следует понимать, что утверждения и чертежи, которые формируют часть этого описания изобретения, ограничивают изобретение. Из этого описания изобретения различные модификации, примеры и методы эксплуатации будут очевидны специалистам в области техники.
Список номеров ссылок
[0077] 1 система оценки местоположения
2 система оценки загораживания
3 система обнаружения светофора
4 система управления транспортным средством
10 устройство обнаружения светофора
11 блок обнаружения местоположения транспортного средства
12 блок картографической информации
13 блок оценки местоположения светофора
21 блок обнаружения объекта
22 блок оценки загораживания
31 блок захвата изображения
32 блок обнаружения светофора
41 блок получения сигнала транспортного средства
42 блок вычисления расстояния между транспортными средствами и позиции остановки
43 блок управления транспортным средством
Реферат
Изобретение относится к устройству обнаружения светофора и к способу обнаружения светофора. Устройство (10) обнаружения светофора включает в себя: блок (31) захвата изображения, который установлен на транспортном средстве и захватывает изображение окружающей обстановки; блок (11) обнаружения местоположения транспортного средства, который обнаруживает местоположение транспортного средства; блок (12) картографической информации, который хранит картографическую информацию; блок (13) оценки местоположения светофора, который оценивает местоположение светофора около транспортного средства со ссылкой на местоположение транспортного средства и картографическую информацию и задает область поиска светофора, в которой светофор, как оценивается, должен присутствовать; блок (32) обнаружения светофора, который обнаруживает светофор, исследуя область поиска светофора по изображению; и блок (22) оценки загораживания, который оценивает, возникает ли состояние постоянного загораживания, когда обзор светофора постоянно загораживается, в области поиска светофора. Когда блок (22) оценки загораживания оценивает, что состояние постоянного загораживания возникает, блок (13) оценки местоположения светофора выбирает область поиска светофора на основе состояния постоянного загораживания. Обеспечивается выбор светофора для цели обнаружения на основе состояния постоянного загораживания светофора. 2 н. и 5 з.п. ф-лы, 18 ил.
Комментарии