Транспортное средство и способ его автономного управления - RU2644998C2
Код документа: RU2644998C2
Чертежи


Описание
Область техники, к которой относится изобретение
Изобретение относится к автоматически управляемому дорожному транспортному средству и, в частности, к мерам обеспечения безопасности, предусмотренным в автоматически управляемом транспортном средстве, с помощью которых обеспечивается контроль присутствия физически дееспособного водителя на сиденье транспортного средства, когда управление осуществляется в автоматическом режиме.
Уровень техники
Количество устройств автоматизации управления дорожным транспортным средством, легковым или грузовым, выросло в результате развития измерительных технологий (например, технологии обнаружения объектов и определения местоположения), алгоритмов управления и информационных инфраструктур. Объединение таких различных передовых технологий, как адаптивный круиз-контроль (АСС), помощь удержания полосы движения (LKA), рулевое управление с электроусилителем (EPAS), адаптивное рулевое управление передними колесами, помощь при парковке, антиблокировка тормозов (ABS), регулирование тягового усилия, электронный контроль устойчивости (ESC), обнаружение объектов в слепых зонах, использование систем GPS и баз данных цифровых карт, связь между транспортными средствами и т.д., сделало возможным автоматическое управление транспортного средства (т.е. управление без участия или с минимальным участием водителя).
К преимуществам самоуправляемого транспортного средства относятся более безопасная езда, большая подвижность и лучшая согласованность работы транспортных средств. Однако при этом возникает необходимость в дополнительном контроле, позволяющем обеспечить участие водителя в любой необходимый момент. Например, в соответствии с опубликованной патентной заявкой US 2010/0222976 A1 для контроля присутствия водителя на водительском сиденье используется датчик присутствия, в этом случае при отсутствии водителя система содействия водителю отключается. Однако обеспечение присутствия водителя на водительском сиденье во время поездки решает только одну проблему. Необходимо обеспечить присутствие физически дееспособного водителя в момент начала движения транспортного средства, чтобы исключить движение самоуправляемого транспортного средства без водителя на водительском сиденье.
Помимо обеспечения фактического присутствия водителя на водительском сиденье, еще одного преимущества можно было бы достичь, обеспечив присутствие водителя, способного осуществлять при необходимости управление транспортным средством. Если водителю требуется неотложная помощь, например в случае инсульта, сердечного приступа или потери сознания, то транспортное средство могло бы свободно продолжить движение до места назначения. Кроме того, невозможность использования надежного запасного варианта переключения управления на водителя ведет к потере драгоценного времени, необходимого для оказания неотложной помощи.
Таким образом, для обеспечения безотказности, простоты использования, надежности и эффективности систему автоматического управления транспортного средства желательно дополнить функцией контроля присутствия водителя и состояния его здоровья.
Раскрытие изобретения
В одном аспекте изобретения предлагается дорожное транспортное средство с водительским сиденьем и системой автоматического управления, функционирующей в режимах настройки, активного вождения, безопасной остановки и реагирования на чрезвычайную ситуацию. Режим настройки используется для выбора маршрута. Режим активного вождения в транспортном средстве используется для выполнения автоматического рулевого управления, ускорения и торможения при движении по заданному маршруту. Режим безопасной остановки предназначен для обнаружения возможности съезда с проезжей части и остановки транспортного средства и автономного его выполнения. В режиме реагирования на чрезвычайную ситуацию происходит принятие неотложных мер. Для обнаружения водителя на водительском сиденье и определения физиологического состояния водителя предусмотрена специальная система датчиков. В режиме настройки система автоматического управления сравнивает полученное с помощью датчиков физиологическое состояние водителя с заранее заданным нормальным состоянием. Режим активного вождения не запускается до тех пор, пока на водительском сиденье не будет обнаружен водитель, а его физиологическое состояние не совпадет с заранее заданным нормальным состоянием. В режиме активного вождения система автоматического управления отсчитывает время, в течение которого присутствие водителя не было обнаружено. При превышении первого порогового значения система автоматического управления переходит в состояние выдачи предупреждения, чтобы выдать водителю уведомление о том, что режим активного вождения будет выключен, если не будет обнаружен водитель. При превышении второго порогового значения система автоматического управления выключает режим активного вождения и запускает режим безопасной остановки. В режиме активного вождения система автоматического управления сравнивает полученное с помощью датчиков физиологическое состояние водителя с заранее заданным критическим состоянием, при этом в случае совпадения она завершает режим активного вождения и запускает режим реагирования на чрезвычайную ситуацию.
Таким образом, для обнаружения водителя на водительском сиденье и контроля его физиологического состояния в автоматически управляемом транспортном средстве используется один или несколько датчиков. Для обнаружения водителя на водительском сиденье можно использовать известную из уровня техники систему датчиков классификации пассажиров, входящую в систему пассивной безопасности и приспособленную для обнаружения пассажиров на передних сиденьях. Также могут быть использованы и другие датчики присутствия, например инфракрасный детектор приближения. Предупреждение выводится каждый раз при отсутствии водителя, когда автоматически управляемое транспортное средство не припарковано. Если и после этого водитель не будет обнаружен, транспортное средство аккуратно направляется в безопасное место, например на обочину, и останавливается.
Для контроля физиологического состояния, состояния здоровья и самочувствия водителя (например, частоты сердечных сокращений, интенсивности дыхания, температуры тела, уровня сахара в крови, артериального давления и т.д.) используют различные известные биометрические датчики. К ним можно отнести встроенные датчики (например, емкостные датчики, встроенные в водительское сиденье, которые предназначены для измерения частоты сердечных сокращений (ЭКГ) и интенсивности дыхания, или электроды на рулевом колесе, которые предназначены для измерения частоты сердечных сокращений, с датчиком дыхания на ремне безопасности) или личные устройства водителя, которые контролируют особые условия и обмениваются данными с транспортным средством. В альтернативном варианте для обнаружения водителя на сиденье и контроля его физиологического состояния могут быть использованы внутрисалонные датчики изображения, производящие наблюдение за биометрией лица, состоянием глаз, частотой пульса и интенсивностью дыхания с помощью технологий анализа мимики лица и пульсовой оксиметрии. В другом альтернативном варианте присутствие водителя, его частоту сердечных сокращений и интенсивность дыхания можно контролировать с помощью электромагнитных датчиков дистанционного обнаружения, например с помощью радиолокационных и лидарных датчиков. Во время движения производится непрерывный контроль физиологического состояния. В случае обнаружения любого серьезного состояния/отклонения в биологических сигналах могут быть приняты соответствующие корректирующие меры, например перенаправление автоматически управляемого транспортного средства в ближайший пункт скорой помощи для получения необходимой помощи в максимально короткие сроки. В качестве альтернативы транспортное средство может быть аккуратно направлено, например, на обочину, после чего в экстренную службу может быть направлено автоматическое оповещение о чрезвычайной ситуации с указанием местоположения транспортного средства и состояния водителя.
Краткое описание чертежей
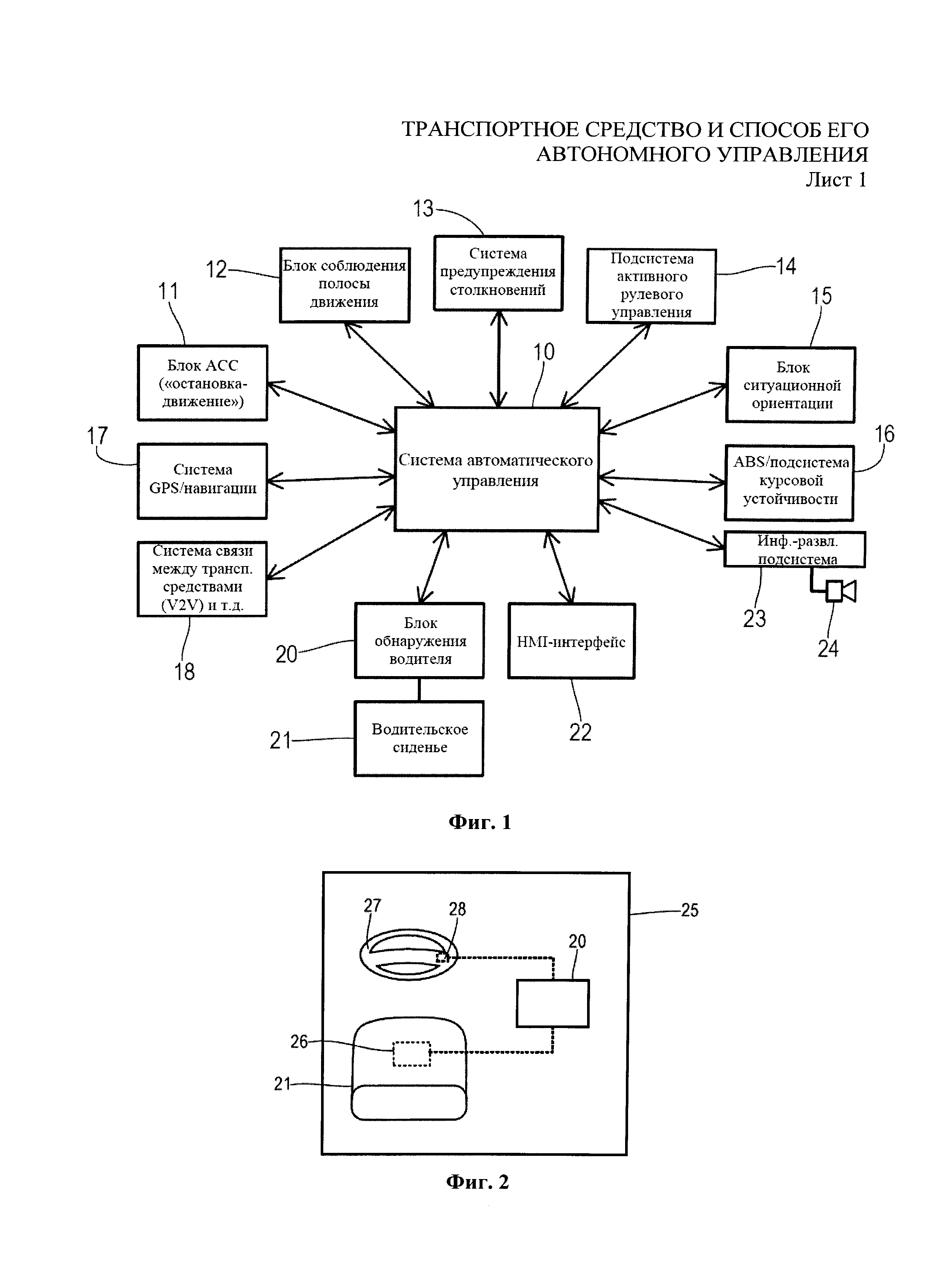
На Фиг. 1 показана блок-схема соответствующих частей транспортного средства с установленной системой автоматического управления, соответствующей настоящему изобретению.
На Фиг. 2 показана схема расположения водительского сиденья и датчиков.
На Фиг. 3 показана диаграмма состояний, отражающая функционирование одного из предпочтительных вариантов осуществления настоящего изобретения.
На Фиг. 4 показана блок-схема предпочтительного способа реализации настоящего изобретения.
Осуществление изобретения
На Фиг. 1 показана система 10 автоматического управления, которая соединена с множеством подсистем и координирует их работу, что позволяет обеспечить автоматическое управление транспортным средством. Блок 11 адаптивного круиз-контроля (АСС) предпочтительно выполняет функцию «остановка-движение», управляя движением транспортного средства вперед с учетом информации о движущемся впереди транспортном средстве и средствах регулирования движения, таких как сигналы торможения и сигналы светофора. Блок 11 АСС соединен с блоком управления двигателем или трансмиссией (не показан), что позволяет ускорить и замедлить транспортное средство. Блок 12 удержания полосы движения может предпочтительно иметь функции системы предупреждения о выезде из полосы движения и/или система помощи движению по полосе. Система 13 предупреждения столкновений может предпочтительно включать в себя радиолокационные датчики переднего, бокового и заднего обзора и/или камеры, передающие данные системе обнаружения и слежения за объектами в соответствии с уровнем техники. Система 13 предупреждения столкновений может быть использована вместе с блоком 15 ситуационной ориентации для обнаружения неподвижных и подвижных препятствий и прочих опасных условий.
Подсистема 14 активного рулевого управления реагирует на команды системы 10 автоматического управления, изменяя курс транспортного средства (например, совершая повороты или следуя по желаемой полосе движения). Замедление и остановка транспортного средства выполняются тормозной системой 16, которая может включать в себя систему ABS и/или подсистемы курсовой устойчивости.
Блок 17 GPS и навигации соединен с системой 10 автоматического управления, что позволяет получать информацию о местоположении, скорости и курсе транспортного средства. Для планирования и контроля маршрута база данных электронных карт хранится в блоке 17 GPS или считывается с внешнего источника через блок GPS 17 (например, по беспроводному каналу связи). Доступ к прочей информации из внешних источников можно получить по беспроводному каналу связи, например, с помощью системы 18 связи между транспортными средствами (V2V).
Для обеспечения контроля присутствия водителя в соответствии с настоящим изобретением блок 20 обнаружения водителя соединен с системой 10 автоматического управления. Блок 20 обнаружения водителя включает в себя один или несколько датчиков, направленных на водительское сиденье 21, что позволяет обнаружить присутствие или отсутствие водителя, правильно сидящего на водительском сиденье 21, и контролировать его физиологическое состояние.
С системой 10 автоматического управления соединен человеко-машинный интерфейс (HMI) 22, который оборудован кнопками, циферблатами, системами голосового управления и другими устройствами ввода, предназначенными для ввода информации водителем (например, указание пункта назначения и/или маршрута), а также графическим дисплеем для вывода ответной информации для водителя. Ответная информация для водителя также может быть выдана с помощью информационно-развлекательных подсистем 23 (например, системы Ford SYNC®), генерирующих звуковые предупреждения через динамики 24.
На Фиг. 2 показано транспортное средство 25 с водительским сиденьем 21. Датчик 26 обнаружения водителя встроен в сиденье 21 и соединен с системой 20 обнаружения водителя, которая может являться частью системы 10 автоматического управления. Датчик 26 может представлять собой емкостной датчик, одновременно отслеживающий присутствие водителя и некоторые физиологические параметры, например частоту сердечных сокращений (по ЭКГ) и интенсивность дыхания. В качестве альтернативы состояние водителя может быть обнаружено при помощи датчика 28, установленного на рулевом колесе 27 или в любом другом месте в транспортном средстве 25. Например, датчик 28 может определять частоту сердечных сокращений при помощи электродов.
На Фиг. 3 показан принцип функционирования настоящего изобретения в виде диаграммы состояний. Транспортное средство может работать в режиме 30 ручного управления, при котором водитель активно управляет некоторыми или всеми функциями (например, рулевое управление, ускорение и торможение). Если водитель хочет использовать систему автоматического управления, он подает команду включения с помощью HMI. В ответ на включение системы автоматического управления происходит переход в режим 31 настройки, в котором водитель указывает пункт назначения и/или маршрут движения автоматически управляемого транспортного средства. Маршрут может быть построен автоматически с помощью навигационной системы на основании пункта назначения и заранее заданных критериев выбора маршрута в соответствии с уровнем техники. После выбора пункта назначения и маршрута водитель с помощью HMI может подать команду о начале автоматического движения по маршруту.
В режиме 31 настройки система автоматического управления начинает контролировать присутствие водителя на водительском сиденье и его физиологическое состояние. Для того чтобы команда о начале движения была принята, не только водитель должен сидеть на водительском сиденье, но и его физиологическое состояние должно оцениваться как «нормальное». Контролируемый биологический параметр (параметры) имеет заранее заданное нормальное значение, которое хранится в системе автоматического управления и сравнивается с измеренными значениями. Например, заранее заданное нормальное значение частоты сердечных сокращений может составлять приблизительно от 30 до 110 ударов в минуту. При присутствии водителя и совпадении полученного физиологического состояния с заранее заданными нормальными значениями происходит переход к режиму 32 активного вождения, в котором начинают функционировать различные традиционные системы, осуществляющие автоматическое управление транспортным средством.
В режиме 32 активного вождения система по изобретению контролирует присутствие водителя следующим образом. Система автоматического управления продолжает контролировать как присутствие водителя, так и его физиологическое состояние. Полученное физиологическое состояние непрерывно сравнивается с заранее заданным критическим состоянием, соответствующим высокой вероятности того, что 1) водитель не способен при необходимости взять на себя функцию управления или 2) водитель нуждается в неотложной медицинской помощи. Заранее заданное критическое состояние может быть физиологическим состоянием, противоположным установленному нормальному состоянию (например, частота сердечных сокращений выходит за пределы от 30 до 110) или может быть установлено в виде предельных значений критического состояния (например, частота сердечных сокращений менее 25 или более 120 ударов в минуту). При соответствии измеренного физиологического состояния заранее заданному критическому состоянию происходит переход в режим 33 реагирования на чрезвычайную ситуацию, в котором автоматически выполняется принятие чрезвычайных мер.
Принятие чрезвычайных мер подразумевает прокладку аварийного маршрута до пункта скорой помощи и автоматическое выполнение в транспортном средстве функций рулевого управления, ускорения и торможения во время движения по аварийному маршруту. В качестве альтернативы неотложные меры могут заключаться в обнаружении и автоматическом съезде с проезжей части в безопасное место с последующим автоматическим направлением сообщения в экстренную службу. После остановки транспортного средства в измененном пункте назначения или ином безопасном месте транспортное средство может быть переведено в режим ручного управления (не показано).
В режиме 32 активного вождения также идет отсчет времени при каждом обнаружении отсутствия водителя, правильно сидящего на водительском сиденье. Как показано на Фиг. 3, если время, в течение которого водитель отсутствует на водительском сиденье, достигает первого порогового значения T1, происходит переход в режим 34 выдачи предупреждения. Генерируется визуальное /или звуковое сообщение для водителя о том, что режим активного вождения будет завершен, если присутствие водителя не будет обнаружено в течение дополнительного временного промежутка. Если прошедшее время превысит второе пороговое значение T2, система автоматического управления завершает режим 32 активного вождения и запускает режим 35 безопасной остановки, в котором контроллер автоматического управления обнаруживает и автоматически направляет транспортное средство к месту остановки вне проезжей части (например, на свободную обочину или стоянку).
На Фиг. 4 показан предпочтительный способ функционирования настоящего изобретения. На этапе 40 включается режим настройки. На этапе 41 водитель указывает маршрут/пункт назначения и подает запрос на включение автоматического управления. На этапе 42 выполняется проверка присутствия водителя и его нормального физиологического состояния. При отсутствии водителя на этапе 43 выводится сообщение об ошибке, после чего происходит возврат на этап 41.
Если водитель присутствует и здоров, на этапе 44 запускается режим активного вождения. На этапе 45 выполняется проверка прибытия в пункт назначения. Если пункт назначения достигнут, поездка в автоматическом режиме завершается на этапе 46. В противном случае на этапе 47 непрерывно контролируемое физиологическое состояние водителя сравнивается с заранее заданным критическим состоянием. При обнаружении совпадения на этапе 48 выполняется принятие чрезвычайных мер и выход из режима активного вождения.
Если физиологическое состояние водителя в норме, на этапе 50 выполняется проверка отсутствия водителя на водительском сиденье в течение временного промежутка, превышающего первое пороговое значение T1 (например, приблизительно 5 секунд, но время может быть установлено пропорционально скорости движения транспортного средства). При отрицательном результате происходит возврат на этап 45. Если время отсутствия водителя превысит T1, на этапе 51 генерируется предупреждение. После этого водительское сиденье контролируют на предмет обнаружения возврата водителя. На этапе 52 выполняется проверка обнаружения присутствия водителя. В случае обнаружения водителя происходит возврат на этап 45. В противном случае на этапе 53 выполняется проверка превышения второго порогового значения T2 времени отсутствия водителя. При положительном результате на этапе 54 выполняется безопасная остановка. В противном случае происходит возврат на этап 52 с целью дальнейшего ожидания возврата водителя на водительское сиденье.
Реферат
Предложено дорожное транспортное средство с системой автоматического управления, функционирующей в режимах настройки, активного вождения, безопасной остановки и реагирования на чрезвычайную ситуацию. В режиме активного вождения транспортное средство автоматически двигается по маршруту, заданному в режиме настройки. Система обнаружения водителя обнаруживает присутствие водителя на водительском сиденье и контролирует его физиологическое состояние. Режим активного вождения не запускается до тех пор, пока на водительском сиденье не будет обнаружен водитель и его физиологическое состояние не совпадет с заранее заданным нормальным состоянием. В режиме активного вождения производится отсчет времени, в течение которого не обнаружено присутствия водителя. В случае превышения первого порогового значения времени водителю направляют сообщение о том, что режим активного вождения может быть завершен. При превышении второго порогового значения времени завершают режим активного вождения и запускают режим безопасной остановки. В режиме активного вождения полученную информацию о физиологическом состоянии водителя сравнивают с заранее заданным критическим состоянием и в случае совпадения данных значений завершают режим активного вождения с последующим запуском режима реагирования на чрезвычайную ситуацию. Предложен также способ автономного вождения дорожного транспортного средства. Достигается обеспечение безотказности, простоты использования, повышение надежности, увеличение эффективности. 2 н. и 18 з.п. ф-лы, 4 ил.
Комментарии