Способ помощи в передвижении транспортного средства и устройство помощи в передвижении транспортного средства - RU2730299C1
Код документа: RU2730299C1
Чертежи








Описание
Область техники
[0001]
Настоящее изобретение относится к способу помощи в передвижении транспортного средства и устройству помощи в передвижении транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002]
Патентная литература 1 раскрывает методику, в котором операция вождения при ручном вождении изучается в связи с окружающей средой, и при автоматическом вождении автоматическое управление транспортным средством, соответствующее предпочтению водителя, исполняется на основе результата изучения.
СПИСОК ЦИТИРУЕМИХ ИСТОЧНИКОВ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентная литература 1: Публикация японской заявки на патент № 2015–89801
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004]
Однако в традиционном примере, раскрытом в Патентной Литературе 1, поскольку предпочтение водителя изучается, и результат этого изучения просто отражается при автоматическом вождении, водитель иногда воспринимает, что активация тормоза запаздывает при автоматическом вождении, и поэтому чувствует беспокойство.
[0005]
Настоящее изобретение было сделано для решения такой традиционной проблемы, и его цель состоит в том, чтобы предоставить способ помощи в передвижении транспортного средства и устройство помощи в передвижении транспортного средства, которые могут уменьшать беспокойство, испытываемое водителем.
[0006]
В варианте осуществления настоящего изобретения изучается момент времени торможения транспортного средства при ручном вождении, и при автоматическом вождении активируется тормоз, так что момент времени, в который водитель воспринимает операцию торможения, является более ранним, чем изученный момент времени торможения.
БЛАГОПРИЯТНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007]
Согласно одному аспекту настоящего изобретения, поскольку торможение может исполняться в момент времени, подходящий для водителя, беспокойство, испытываемое водителем, может быть уменьшено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
[ФИГ. 1] Фиг. 1 является блок–схемой, иллюстрирующей конфигурации устройства помощи в передвижении транспортного средства и его периферийных устройств согласно варианту осуществления настоящего изобретения.
[ФИГ. 2] Фиг. 2 является последовательностью операций, иллюстрирующую этапы обработки в устройстве помощи в передвижении транспортного средства в соответствии с вариантом осуществления настоящего изобретения.
[ФИГ. 3] Фиг. 3 является последовательностью операций, иллюстрирующую обработку параметров чувствительности водителя в устройстве помощи в передвижении транспортного средства согласно варианту осуществления настоящего изобретения.
[ФИГ. 4A] Фиг. 4A является пояснительным видом, иллюстрирующим расстояние от позиции остановки до позиции активации тормоза и величину Loff смещения.
[ФИГ. 4B] Фиг. 4B является пояснительным видом, иллюстрирующим расстояние от позиции остановки до позиции активации тормоза, и иллюстрирует случай, когда величина смещения велика.
[ФИГ. 4C] Фиг. 4C является пояснительным видом, иллюстрирующим расстояние от позиции остановки до позиции активации тормоза, и иллюстрирует случай, когда величина смещения мала.
[ФИГ. 5A] Фиг. 5A является графиком, иллюстрирующим данные изучения в соотношениях между скоростью транспортного средства и расстоянием от позиции остановки до позиции активации тормоза, и иллюстрирует случай, когда вариация является малой.
[ФИГ. 5B] Фиг. 5B является графиком, иллюстрирующим данные изучения в соотношениях между скоростью транспортного средства и расстоянием от позиции остановки до позиции активации тормоза, и иллюстрирует случай, когда вариация является большой.
[ФИГ. 6A] Фиг. 6A является графиком, иллюстрирующим данные изучения в отношении соотношений между скоростью транспортного средства и частотой педального управления, и иллюстрирует случай, когда частота педального управления является высокой.
[ФИГ. 6B] Фиг. 6B является графиком, иллюстрирующим данные изучения в соотношениях между скоростью транспортного средства и частотой педального управления, и иллюстрирует случай, когда частота педального управления является низкой.
[ФИГ. 7A] Фиг. 7A является графиком, иллюстрирующим данные изучения в изменениях ускорения в направлении вперед–назад транспортного средства в течение всего времени и иллюстрирует случай, когда частота изменений ускорения является высокой.
[ФИГ. 7B] Фиг. 7B является графиком, иллюстрирующим данные изучения в изменениях ускорения в направлении вперед–назад транспортного средства в течение всего времени и иллюстрирует случай, когда частота изменений ускорения является низкой.
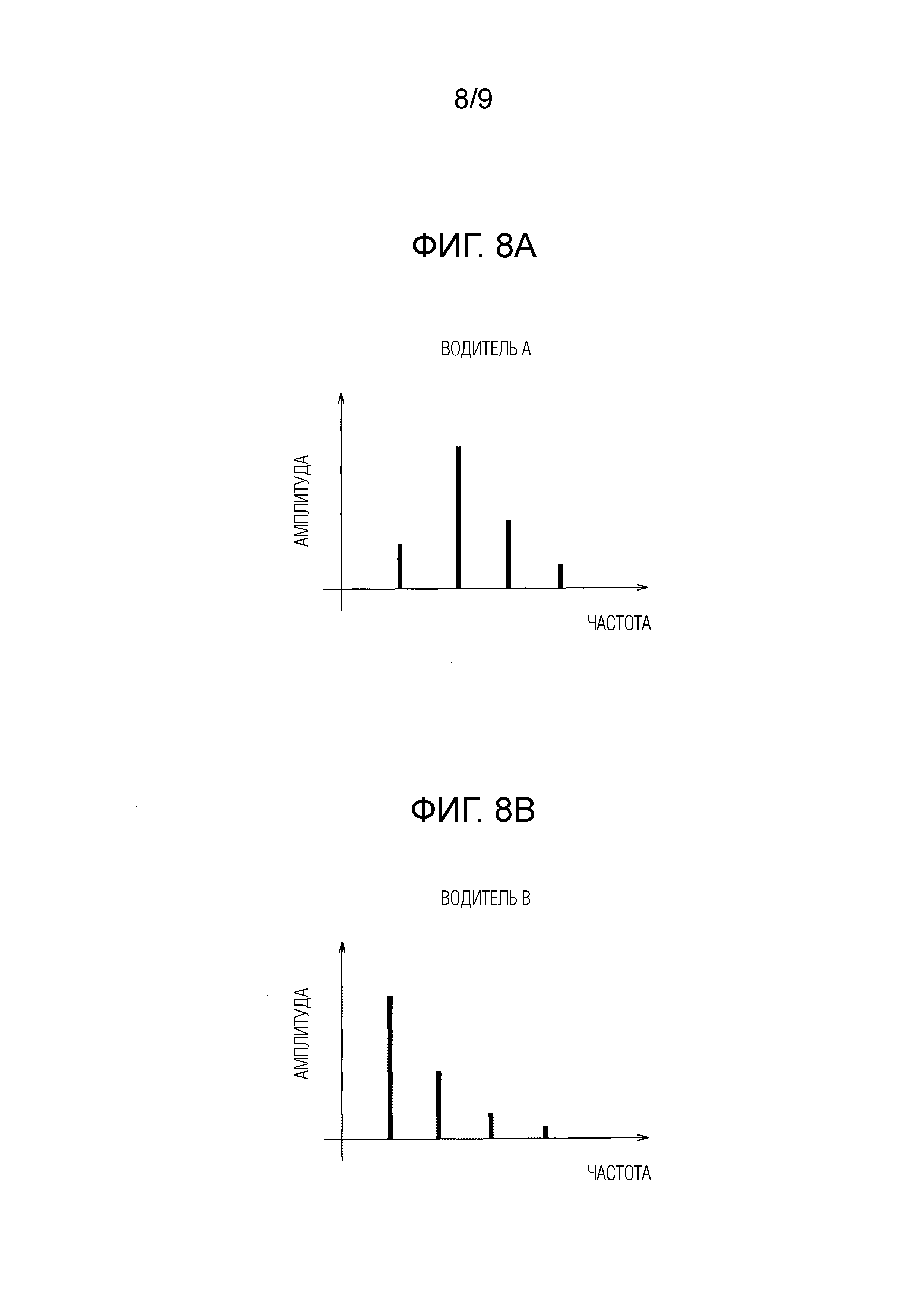
[ФИГ. 8A] Фиг. 8A иллюстрирует график, полученный посредством выполнения частотного анализа в отношении графика, иллюстрированном на фиг. 7A.
[ФИГ. 8B] Фиг. 8B иллюстрирует график, полученный посредством выполнения частотного анализа на графике, иллюстрированном на фиг. 7B.
[ФИГ. 9] Фиг. 9 является графиком, иллюстрирующим соотношение между скоростью транспортного средства, расстоянием от позиции остановки до позиции активации тормоза и величиной смещения.
[Фиг.10] Фиг. 10 является пояснительной таблицей, иллюстрирующей соотношения между вариацией данных, частотой педального управления, частотой изменения ускорения и чувствительностью вождения водителя.
Описание вариантов осуществления
[0009]
Вариант осуществления настоящего изобретения описан ниже со ссылкой на чертежи.
[Описание первого варианта осуществления]
Фиг.1 является блок–схемой, иллюстрирующей конфигурации устройства помощи в передвижении и его периферийных устройств в соответствии с вариантом осуществления настоящего изобретения.
[0010]
Устройство 100 помощи в передвижении представляет собой контроллер, который изучает операцию вождения водителя при ручном вождении в транспортном средстве, переключаемую между ручным вождением посредством водителя и автоматическим вождением, и который исполняет обработку применения полученного таким образом результата изучения или результата изучения, полученного на основе данных, относящихся к действиям водителя, или тому подобное, для управления передвижением при автоматическом вождении. Устройство 100 помощи в передвижении соединено со схемой 21 обнаружения условий передвижения, схемой 22 обнаружения окружающих условий и различными исполнительными механизмами 31.
[0011]
Следует отметить, что автоматическое вождение в варианте осуществления относится к состоянию, в котором, по меньшей мере, исполнительный механизм тормоза среди исполнительных механизмов, например, тормоза, акселератора, рулевого управления и т.п., управляется без операций водителя. Соответственно, другие исполнительные механизмы могут быть активированы посредством операции водителя. Кроме того, автоматическое вождение только должно быть состоянием, когда исполняются любое из управлений из управления ускорением–замедлением, управления боковой позицией и т.п.
Следует отметить, что ручное вождение в варианте осуществления относится к состоянию, когда водитель выполняет, по меньшей мере, операцию тормоза среди операций, необходимых для передвижения, таких как, например, операции тормоза, акселератора, рулевого управления и т.п.
[0012]
Устройство 100 помощи в передвижении может быть реализовано посредством использования микрокомпьютера, включающего в себя CPU (центральный процессор), запоминающее устройство и модуль ввода–вывода. Компьютерная программа для вынуждения микрокомпьютера функционировать как устройство 100 помощи в передвижении, инсталлируется в микрокомпьютере и исполняется. Микрокомпьютер, таким образом, функционирует как множество схем обработки информации, включенных в устройство 100 помощи в передвижении. Следует отметить, что хотя описан пример, в котором устройство 100 помощи в передвижении реализовано посредством программного обеспечения, устройство 100 помощи в передвижении может быть сформировано посредством подготовки выделенного (специализированного) аппаратного обеспечения для исполнения различных информационных процессов. Электронный блок управления (ECU), используемый для других средств управления, относящихся к транспортному средству, может служить также в качестве устройства 100 помощи в передвижении. Хотя пример, в котором устройство 100 помощи в передвижении вмонтировано в транспортное средство, описывается в варианте осуществления, конфигурация может быть такой, что устройство связи устанавливается в транспортном средстве, а устройство 100 помощи в передвижении устанавливается на внешнем сервере.
[0013]
Как проиллюстрировано на Фиг.1, устройство 100 помощи в передвижении в соответствии с вариантом осуществления включает в себя схему 11 настройки характеристик автоматического вождения и схему 12 определения характеристик передвижения.
Схема 21 обнаружения условий передвижения обнаруживает данные передвижения, указывающие состояния передвижения транспортного средства, такие как операция торможения, величина управления в операции торможения, степень увеличения величины управления в операции торможения, операция акселератора, частота операции педали тормоза, частота операции педали акселератора, скорость транспортного средства, ускорение, угол поворота при рулевом управлении, присутствие или отсутствие предыдущего транспортного средства, расстояние между транспортными средствами до предыдущего транспортного средства, скорость относительно предыдущего транспортного средства, текущая позиция, состояние отображения индикатора поворота, состояние освещения передней фары, состояние операции стеклоочистителя и тому подобное. Например, схема 21 обнаружения условий передвижения включает в себя датчики, предоставленные на педали тормоза и педали акселератора, датчики, которые получают поведение транспортного средства, такие как датчик колеса и датчик угловой скорости рыскания, лазерный радар, камера, сеть внутри транспортного средства, такая как CAN (Локальная сеть контроллеров), используемые для передачи данных, полученных от вышеупомянутых датчиков, и навигационное устройство.
[0014]
Схема 22 обнаружения окружающих условий обнаруживает информацию об окружающей среде, обозначающую окружающую среду вокруг транспортного средства, такую как текущую позицию транспортного средства, расстояние до линии остановки, предоставленной перед транспортным средством на дороге, по которой передвигается транспортное средство, ограничение скорости дороги, уклон дороги, состояние отображения сигнала светофора перед транспортным средством, расстояния до пешеходов и велосипедов, количество транспортных средств перед транспортным средством и расстояние до предыдущего транспортного средства. Например, схема 22 обнаружения окружающих условий является камерой, лазерным радаром, навигационным устройством и т.п., вмонтированным в транспортное средство. Следует отметить, что схема 22 обнаружения окружающих условий включает в себя устройство, которое выполняет обнаружение посредством связи между транспортными средствами и связи внутри транспортного средства.
Исполнительные механизмы 31 принимают инструкции исполнения, выданные посредством схемы 12 определения характеристик передвижения и приводными узлами, такими как акселератор, тормоз и рулевое управление транспортного средства.
[0015]
Далее описаны блоки, формирующие устройство 100 помощи в передвижении. Схема 11 настройки характеристик автоматического вождения включает в себя схему 41 изучения ручного вождения, схему 42 настройки величины управления, схему 43 настройки чувствительности водителя, схему 44 настройки величины смещения управления и схему 45 определения управления вождением. Схема 12 определения характеристик передвижения включает в себя модуль 51 управления приводом транспортного средства и модуль 52 управления рулевым управлением.
[0016]
Схема 41 изучения ручного вождения получает данные о передвижении, относящиеся к состояниям передвижения транспортного средства, и данные об окружающих условиях, относящихся к окружающим условиям вокруг транспортного средства, из схемы 21 обнаружения условий передвижения и схемы 22 обнаружения окружающих условий и изучает операцию вождения водителя при ручном вождении. Кроме того, схема 41 изучения ручного вождения сохраняет данные изучения в запоминающем устройстве 411. Схема 41 изучения ручного вождения изучает момент времени операции торможения транспортного средства как операцию вождения, подлежащую изучению. Например, в то время как транспортное средство остановлено или передвигается, схема 41 изучения ручного вождения изучает момент времени торможения в связи с различными сценами передвижения, такими как случай, когда транспортное средство остановлено в позицию остановки, такую как линия остановки, предоставленная на перекрестке, или подобное, случай, когда транспортное средство остановлено позади остановленного предыдущего транспортного средства, и случай, когда транспортное средство передвигается, следуя за предшествующим транспортным средством. Случаи, подлежащие изучению, включают в себя позицию активации тормоза, которая представляет собой позицию, в котором тормоз активируется относительно позиции остановки, расстояние до позиции остановки и поведение транспортного средства при операции торможения, такой как скорость транспортного средства, ускорение, и тому подобное при активации тормоза.
[0017]
«Момент времени торможения» является моментом времени, в который водитель задействует тормоз (педаль тормоза), и тормоз активируется, момент времени, в который замедление действует на транспортное средство, момент времени, в который операция акселератора прекращается, или момент времени, когда начинается операция педали тормоза, когда основное транспортное средство должно быть остановлено в позиции остановки. В качестве альтернативы, «момент времени торможения» может быть моментом времени, в который величина операции (величина шага) педали тормоза водителем достигает или превышает предварительно определенную величину, установленную заранее, или моментом времени, в который величина операции (величина шага) педали акселератора водителем достигает или опускается ниже заранее определенной величины, установленной заранее.
В качестве другой альтернативы, «момент времени торможения» может быть моментом времени, в который водитель задействует тормоз, и величина управления при операции торможения достигает некоторого значения, установленного заранее, или моментом времени, в который степень увеличения величины управления при операции торможения достигает некоторого значения. В частности, момент времени, в который предварительно определенное снижение скорости посредством операции торможения еще не достигнуто, но величина управления тормозом или степень увеличения величины управления достигла некоторого значения, может быть установлена в качестве момента времени торможения. В частности, момент времени торможения является концепцией, включающей в себя момент времени, в который тормоз активируется (момент времени начала торможения), момент времени отпускания акселератора (момент времени начала торможения), момент времени, в который величина управления тормозом достигает некоторого значения, и момент времени, в который скорость увеличения величины управления тормозом достигает некоторого значения. Другими словами, момент времени торможения является моментом времени, в который водитель воспринимает операцию торможения. Кроме того, тормоз в варианте осуществления включает в себя гидравлический тормоз, тормоз с электронным управлением и регенеративный тормоз. Следует обратить внимание, что момент времени торможения может включать в себя состояние, в котором замедление действует, даже если гидравлический тормоз, тормоз с электронным управлением или регенеративный тормоз не активен.
[0018]
В частности, когда транспортное средство должно быть остановлено в позиции остановки, таком как линия остановки, предоставленная на перекрестке, схема 41 изучения ручного вождения получает данные передвижения и данные окружающих условий, таких как расстояние от основного транспортного средства до позиции остановки, скорость передвижения и замедление основного транспортного средства, а также наклон дорожного полотна (в гору или под уклон) от вышеупомянутой схемы 21 обнаружения условий передвижения или схемы 22 обнаружения окружающих условий. Кроме того, схема 41 изучения ручного вождения изучает позицию активации тормоза (расстояние от позиции остановки) и момент времени торможения в этом условии. Схема 41 изучения вождения ручного управления сохраняет данные изучения в запоминающем устройстве 411.
[0019]
Когда режим вождения переходит от ручного вождения к автоматическому вождению, схема 42 настройки величины управления устанавливает величины управления для выполнения автоматического вождения на основе данных изучения, изученных посредством схемы 41 изучения ручного управления, данных передвижения, обнаруженных посредством схемы 21 обнаружения условий передвижения, и данных окружающих условий, обнаруженных посредством схемы 22 обнаружения окружающих условий. Величинами управления, которые должны быть установлены, являются позицией активации тормоза, моментом времени торможения, замедлением и т.п. при остановке транспортного средства.
[0020]
Схема 43 настройки чувствительности водителя устанавливает чувствительность вождения водителя для вождения на основе прошлых операций вождения водителя, изученных посредством схемы 41 изучения ручного управления. Чувствительность вождения в варианте осуществления относится к чувствительности водителя при передвижении. Например, есть водители, которые распознают изменение скорости транспортного средства на несколько км/ч и выполняют операцию коррекции, а есть водители, кто этого не делает. Например, есть водители, которые часто выполняют коррекцию рулевого управления, чтобы отрегулировать скорость транспортного средства до целевой скорости транспортного средства или ограничивают скорость транспортного средства насколько это возможно, и водители, которые этого не делают, и водители, которые заботятся о скорости транспортного средства, отклоняющейся от целевой скорости транспортного средства, или ограничивают скорость транспортного средства, и водители, которые не делают этого, и чувствительность для передвижения варьируется в зависимости от водителей. Настройка чувствительности вождения, как описано выше, позволяет выполнить соответствующее управление, подходящее каждому водителю.
[0021]
В частности, схема 43 настройки чувствительности водителя определяет чувствительность вождения водителя на основе вариации данных изучения в отношении желаемой операции вождения водителя, частоты операции педального управления, частоты в частотном анализе данных ускорения и т.п. Чувствительность вождения водителя может быть установлена с помощью постоянно меняющегося числового значения. В качестве альтернативы, чувствительность вождения может быть установлена двумя значениями «высокое» и «низкое». Кроме того, чувствительность вождения может быть установлена посредством использования данных в отношении действий водителя, отличных от вождения, или данных, полученных на основе теста для определения чувствительности вождения.
[0022]
Схема 44 настройки величины смещения управления устанавливает величину смещения при остановке транспортного средства при автоматическом вождении. Например, предположим, что позиция p1 активации тормоза в случае, когда основное транспортное средство V1 остановлено в позиции P1 остановки перед основным транспортным средством V1, как проиллюстрировано на фиг. 4A, получена в качестве изученных данных при ручном вождении. Схема 44 настройки величины смещения управления устанавливает величину Loff смещения для этой позиции p1 активации тормоза. Кроме того, схема 44 настройки величины смещения управления устанавливает момент, в который основное транспортное средство V1 достигает позиции p0, в качестве момента времени торможения. Кроме того, чем выше чувствительность вождения водителя, установленная посредством схемой 43 настройки чувствительности водителя, тем больше величина Loff смещения. Чем выше скорость транспортного средства, тем больше устанавливается величина Loff смещения.
[0023]
Схема 45 определения управления вождением получает величины управления, установленные посредством схемы 42 настройки величины управления, и, кроме того, корректирует величины управления, основанные на величине Loff смещения, установленной посредством схемы 44 настройки величины смещения. В частности, схема 45 определения управления вождением устанавливает величину Loff смещения для позиции р1 активации тормоза при ручном вождении, показанном на фиг.4А. Затем схема 45 определения управления вождением выполняет коррекцию, так что позиция за позицией p1 активации тормоза посредством величины Loff смещения устанавливается в качестве позиции активации тормоза. Откорректированная позиция активации тормоза обозначена посредством p0. Кроме того, момент времени, в который основное транспортное средство V1 достигает позиции p0 активации тормоза, устанавливается как момент времени торможения. Соответственно, при автоматическом вождении момент времени торможения устанавливается так, что момент времени, в который водитель воспринимает операцию торможения, является более ранним, чем момент времени торможения, изученный при ручном вождении.
Затем схема 45 определения управления вождением корректирует величины управления так, что торможение выполняется в установленный момент времени торможения, и выводит сигналы управления в схему 12 определения характеристик передвижения.
[0024]
Модуль 51 управления приводом транспортного средства схемы 12 определения характеристик передвижения отправляет сигналы управления в исполнительные механизмы 31 акселераторов и тормоза при автоматическом вождении на основе сигналов управления, отправленных из схемы 45 определения управления вождением. В частности, модуль 51 управления приводом транспортного средства имеет функцию схемы управления передвижением, которая получает момент времени торможения, изученный при ручном вождении, и который задействует тормоз в такой момент времени, что пользователь воспринимает, что операция торможения выполняется в момент времени раньше, чем изученный момент времени торможения при автоматическом вождении. Модуль 52 управления рулевым управлением отправляет сигнал управления в исполнительный механизм 31 рулевого управления при автоматическом вождении на основе сигнала управления рулевого управления, отправленного из схемы 45 определения управления вождением.
[0025]
[Описание операций в первом варианте осуществления]
Далее операции устройства 100 помощи в передвижении согласно первому варианту осуществления описаны со ссылкой на последовательности операций, иллюстрированные на фиг. 2 и 3. Сначала на этапе S11 Фиг.2 схема 41 изучения ручного вождения определяет, является ли текущий режим вождения ручным или автоматическим. В случае ручного вождения на этапе S12 схема 41 изучения ручного вождения получает различные фрагменты данных обнаружения в отношении условий передвижения и окружающих условий из схемы 21 обнаружения условий передвижения и схемы 22 обнаружения окружающих условий.
[0026]
На этапе S13 схема 41 изучения ручного вождения изучает позицию активации тормоза и момент времени торможения при ручном вождении и на этапе S14 сохраняет данные изучения. Например, схема 41 изучения ручного вождения изучает позицию активации тормоза и момент времени торможения в случае, когда основное транспортное средство подлежит остановке в позиции остановки на перекрестке перед транспортным средством при ручном вождении. В частности, как проиллюстрировано на Фиг.4А, схема 41 изучения ручного вождения изучает позицию активации тормоза и момент времени торможения, когда основное транспортное средство V1 должно быть остановлено в позиции P1 остановки на перекрестке при ручном вождении. В примере, проиллюстрированном на фиг. 4A, поскольку тормоз активируется в позиции p1 дальше от позиции P1 остановки на расстояние X1, схема 41 изучения ручного вождения изучает позицию p1 как позицию активации тормоза. Кроме того, схема 41 изучения ручного вождения изучает момент времени, в который основное транспортное средство V1 достигает позиции p1, в качестве момента времени торможения. Схема 41 изучения ручного вождения сохраняет данные изучения в запоминающем устройстве 411. Кроме того, схема 41 изучения ручного вождения сохраняет скорость передвижения основного транспортного средства V1, информацию об уклоне (в гору или под уклон) дорожного полотна и расстояние X1 от основного транспортного средства V1 до позиции P1 остановки в данном случае в запоминающем устройстве 411. Следует отметить, что, хотя пример, в котором основное транспортное средство V1 должно быть остановлено в позиции P1 остановки, проиллюстрирован на фиг. 4A, позиция дальше от задней части остановленного предшествующего транспортного средства посредством определенного расстояния может быть установлена в качестве позиции остановки.
[0027]
Кроме того, как описано выше, схема 41 изучения ручного вождения может изучать величину операции (величину шага) педали тормоза или величину операции (величину шага) педали акселератора в качестве момента времени торможения. В частности, схема 41 изучения ручного вождения может изучать момент, в который водитель задействует педаль тормоза, и величина операции (величина шага) педали тормоза достигает или превышает предварительно определенную величину операции торможения, установленную заранее в качестве момента времени торможения. Кроме того, схема 41 изучения вождения ручного управления может изучать момент времени, в который водитель прекращает операцию педали акселератора, и величина операции акселератора достигает или падает ниже заранее определенной величины операции акселератора, установленной заранее, в качестве момента времени торможения.
[0028]
На этапе S15 схема 41 изучения ручного вождения определяет, достигает ли величина данных изучения, сохраненных в запоминающем устройстве 411, предварительно определенной величины, установленной заранее. Когда величина данных изучения достигает предварительно определенного количества (ДА на этапе S15), обработка сохранения данных изучения завершается.
[0029]
Когда обработка сохранения данных изучения завершена, и схема 41 изучения ручного вождения определяет, что режимом вождения является автоматическое вождение при обработке на этапе S11, на этапе S16 схема 42 настройки величины управления определяет, останавливать ли основное транспортное средство в позиции остановки, таком как линия остановки при автоматическом вождении. Когда основное транспортное средство должно быть остановлено (ДА на этапе S16), на этапе S17 схема 42 установки величины управления получает данные изучения в отношении позиции активации тормоза и момента времени торможения, сохраненные в запоминающем устройстве 411.
[0030]
На этапе S18 схема 42 настройки величины управления устанавливает величины управления тормозом и акселератором на основании данных изучения.
На этапе S19 схема 43 настройки чувствительности водителя выполняет обработку настройки чувствительности вождения водителя. Процесс настройки чувствительности вождения водителя описан ниже со ссылкой на последовательность операций, проиллюстрированную на Фиг.3.
[0031]
На этапах S31, S33 и S35 схема 43 настройки чувствительности водителя определяет чувствительность вождения (чувствительность для передвижения) водителя на основании: (1) вариация данных изучения в отношении желаемой операции вождения водителя; (2) частоты операций педали; и (3) частоты при частотном анализе данных акселератора. Определение чувствительности вождения водителя на основе вышеупомянутых пунктов (1) – (3) подробно описано ниже.
[0032]
(1) Описание определения чувствительности вождения на основе вариаций в данных изучения.
Фиг. 5A и 5B являются графиками, поясняющими определение чувствительности вождения водителя на основании вариации данных изучения. Фиг. 5A иллюстрирует данные в отношении водителя A, а фиг. 5B иллюстрирует данные в отношении водителя B. Данные изучения, как проиллюстрировано на фиг. 5A и 5B, могут быть получены, например, посредством изучения скорости транспортного средства в случае, когда основное транспортное средство должно быть остановлено на линии остановки, и расстояния до линии остановки в случае, когда тормоз задействован. На фиг.5А и 5В горизонтальные оси представляют скорость транспортного средства, а вертикальные оси представляют расстояние от основного транспортного средства до линии остановки. Символы кружков на фиг. 5А и 5В представляют фрагменты данных изучения. Как видно из фиг. 5А и 5В, соотношение между скоростью транспортного средства и расстоянием изменяется по существу линейно, так что чем выше скорость транспортного средства, тем больше расстояние от основного транспортного средства до линии остановки.
[0033]
Кроме того, на Фиг.5А каждый фрагмент данных изучения расположен вблизи прямой линии r1, и вариация данных изучения мала. Соответственно, схема 43 настройки чувствительности водителя определяет, что чувствительность вождения водителя A является высокой. Между тем, на Фиг.5B каждый фрагмент данных изучения находится далеко от прямой линии r2, и вариация данных изучения является большой. Соответственно, схема 43 настройки чувствительности водителя определяет, что чувствительность вождения водителя B ниже, чем у водителя А. Определение вариации может быть выполнено также посредством вычисления стандартного отклонения для каждой скорости передвижения из множества фрагментов данных изучения и определение того, что чем больше стандартное отклонение, тем больше вариация.
[0034]
(2) Описание определения чувствительности вождения на основе частоты нажатия педаль.
Фиг. 6А и 6В являются диаграммами, поясняющими определение чувствительности вождения водителя на основе частоты операции педали. На фиг. 6A иллюстрированы данные водителя A, а на фиг. 6B иллюстрированы данные водителя B. Эти фрагменты данных получены из данных в отношении частоты операции каждой из педали акселератора и педали тормоза при передвижении посредством ручного вождения водителя. Данные могут быть получены с помощью схемы 21 обнаружения условий передвижения, проиллюстрированной на фиг.1. Например, конфигурация может быть такой, что предварительно определенное время установлено, и число раз, когда каждая из педали акселератора и педали тормоза задействуется в течение этого предварительно определенного времени, устанавливается как частота операций.
[0035]
На Фиг. 6А и 6В горизонтальные оси представляют время, а вертикальные оси представляют операции педали акселератора и педали тормоза. Можно увидеть, что частота операции педали выше на фиг. 6A, чем на фиг. 6B. Схема 43 настройки чувствительности водителя определяет, что водитель A с высокой частотой операции педали имеет высокую чувствительность вождения. Между тем схема 43 настройки чувствительности водителя определяет, что водитель B с низкой частотой операций педали имеет более низкую чувствительность вождения, чем водитель А. Настройка чувствительности вождения может быть такой, что чем выше частота операций педали, тем выше устанавливается чувствительность вождения, или такой, что устанавливается пороговое значение для частоты операций педали, и чувствительность вождения определяется как высокая, когда частота операций педали равна или превышает пороговое значение, и определяется как низкая, когда частота операций педали ниже, чем пороговое значение.
[0036]
(3) Описание определения чувствительности вождения на основе частот в частотном анализе данных ускорения
Фиг. 7А и 7В являются графиками, поясняющими определение чувствительности вождения водителя на основе частоты в частотном анализе данных ускорения. Фиг.7A иллюстрирует данные водителя A, а фиг.7B иллюстрирует данные водителя B. Получают данные ускорения (данные ускорения в направлении передвижения) при передвижении посредством ручного вождения водителя. Эти данные могут быть получены посредством схемы 21 обнаружения условий передвижения, проиллюстрированной на фиг.1. Например, устанавливается предварительно определенное время, и получают данные ускорения в течение этого предварительно определенного времени.
[0037]
Как проиллюстрировано на фиг.7А, в случае водителя А многие изменения ускорения происходят в предварительно определенное время. Между тем, в случае водителя B меньше изменений ускорения происходят в предварительно определенное время. Затем выполняется частотный анализ в отношении кривых, представляющих изменения ускорения, а результаты частотного анализа, проиллюстрированные, например, на фиг. 8А и 8В, таким образом, получаются. Фиг. 8А и 8В иллюстрируют результаты, полученные путем выполнения частотного анализа в отношении кривых, проиллюстрированных на фиг. 7А и 7В соответственно. Как видно из фиг. 8A и 8B, результат водителя A включает в себя более высокочастотные компоненты. Затем схема 43 настройки чувствительности водителя определяет, что чем больше высокочастотных компонентов, тем выше чувствительность вождения. В частности, схема 43 настройки чувствительности водителя определяет, что водитель A имеет высокую чувствительность вождения, и определяет, что водитель B имеет более низкую чувствительность вождения, чем водитель A. Следует обратить внимание, что схема 43 настройки чувствительности водителя может выполнять частотный анализ в отношении данных скорости вместо ускорения и определять чувствительность вождения водителя на основе частоты в частотном анализе.
[0038]
Таблица, проиллюстрированная на фиг. 10, получена посредством суммирования содержимого (1), (2) и (3), описанных выше. Чувствительность вождения, обнаруженная при обработке каждого из этапов S31, S33 и S35 на фиг.3, подвергается предварительно определенной обработке установки весовых коэффициентов на соответствующем одном из этапов S32, S34 и S36.
Следует отметить, что, хотя вышеупомянутые три примера приведены в качестве способов определения чувствительности вождения водителя, конфигурация может быть такой, что выполняется, по меньшей мере, один из трех способов. В качестве альтернативы, например, можно определить чувствительность вождения на основе действий водителя, отличных от действий при вождении, или выполнить тест для определения чувствительности вождения заранее и установить чувствительность вождения водителя на основе результата, данного теста.
[0039]
Кроме того, при определении чувствительности вождения можно установить, например, пять уровней числовых значений, установить линейно изменяющееся числовое значение или установить два значения: «высокое» и «низкое».
После этого на этапе S20, проиллюстрированном на фиг.2, схема 44 настройки величины смещения управления устанавливает величину Loff смещения на основе чувствительности вождения водителя. В частности, как проиллюстрировано на фиг.4А, схема 44 настройки величины смещения управления устанавливает позицию (позиция на одной стороне от позиции p1, противоположной позиции P1) p0 за позицией p1 посредством величины Loff смещения, причем позиция p1 является начальной позиция активации тормоза на основе данных изучения, изученных посредством схемы 41 изучения ручного вождения.
[0040]
Кроме того, схема 44 настройки величины смещения управления изменяет величину Loff смещения в зависимости от чувствительности вождения водителя, установленной при обработке на этапе S19. В частности, чем выше чувствительность вождения водителя, тем больше величина Loff смещения.
[0041]
Фиг.4B является пояснительным видом, иллюстрирующим, что позиция активации тормоза водителя (водителя A) определена как высокая чувствительность вождения, и на фиг.4B позиция p2 позади позиции p1 активации тормоза при ручном вождении на величину Loff смещения A устанавливается в качестве позиции активации тормоза. Затем момент времени, в который основное транспортное средство V1 достигает позиции р2 активации тормоза, устанавливается как момент времени торможения. В частности, момент времени торможения при автоматическом вождении устанавливается таким образом, чтобы момент, в который водитель воспринимает операцию торможения, происходил раньше, чем момент времени торможения, изученный при ручном вождении. Кроме того, чем выше чувствительность вождения, тем раньше устанавливается время торможения.
[0042]
Фиг.4C является пояснительным видом, иллюстрирующим позицию активации тормоза водителя (водителя B), имеющего более низкую чувствительность вождения, чем вышеупомянутый водитель A, и, на фиг.4C, позиция p3 позади позиции p1 активации тормоза при ручном вождении посредством величины LoffB смещения (LoffB < LoffA) устанавливается в качестве позиции активации тормоза. Затем момент времени, в который основное транспортное средство V1 достигает позиции р3 активации тормоза, устанавливается как момент времени торможения. В частности, момент времени торможения при автоматическом вождении устанавливается таким образом, чтобы момент, в который водитель воспринимает операцию торможения, является более ранним, чем момент времени торможения, полученный при ручном вождении. Кроме того, поскольку чувствительность вождения водителя B для вождения ниже, чем у водителя A, момент времени торможения устанавливается позже, чем для водителя A.
Кроме того, фиг.9 является графиком, иллюстрирующим соотношение между скоростью транспортного средства и величиной смещения. Как проиллюстрировано на фиг.9, конфигурация может быть такой, что чем выше скорость транспортного средства, тем больше устанавливается величина смещения.
[0043]
Затем на этапе S21 на фиг.2 схема 45 определения управления вождением корректирует величины управления, установленные посредством схемы 42 настройки величины управления, посредством использования величины смещения, установленной посредством схемы 44 настройки величины смещения управления, и выводит скорректированные величины управления в схему 12 определения характеристики передвижения. В частности, схема 45 определения управления вождением устанавливает позицию позади позиции p1 активации тормоза, полученной в качестве данных изучения при ручном вождении, посредством величины Loff смещения (LoffA, LoffB) в качестве позиции активации тормоза при автоматическом вождении и устанавливает момент времени, в который основное транспортное средство проходит эту позицию активации тормоза, в качестве момента времени торможения при автоматическом вождении.
[0044]
После этого модуль 51 управления приводом транспортного средства схемы 12 определения характеристик передвижения выдает инструкцию управления в исполнительный механизм тормоза или акселератора на основе скорректированных величин управления. Соответственно, при автоматическом вождении момент времени торможения может быть установлен более ранним, чем момент времени, в который тормоз активируется при ручном вождении, посредством времени, соответствующем величине Loff смещения. Кроме того, чем выше чувствительность вождения, тем раньше может быть установлен момент времени торможения.
[0045]
Как описано выше, моментом времени торможения является момент времени, в который активируется тормоз, момент времени отпускания акселератора, момент времени, когда величина управления тормоза достигает некоторого значения, или момент времени, в который степень увеличения величины управления тормоза достигает некоторого значения. Другими словами, моментом времени торможения является момент времени, в который водитель воспринимает операцию торможения.
[0046]
Когда операция торможения (включая отпускание акселератора) выполнена при ручном вождении, существует задержка по времени (временная задержка) с момента, когда водитель определяет задействовать тормоз, до момента, когда тормоз фактически активируется. Это время задержки составляет от 0,5 секунды до одной секунды. Соответственно, при ручном вождении тормоз активируется после истечения задержки по времени от определения операции торможения водителем. Схема 41 изучения ручного вождения распознает момент времени, в который тормоз активируется, в качестве момента времени, в который водитель определяет задействовать тормоз. Таким образом, когда момент времени активации тормоза, изученный посредством схемы 41 изучения ручного вождения, применяется к автоматическому вождению, время от 0,5 до 1 секунды истекает с момента, когда водитель определяет задействовать тормоз, до момента, когда тормоз фактически активирован. Если тормоз не активируется в тот момент, когда водитель определит задействовать тормоз, водитель воспринимает, что момент времени, в который тормоз активирован, запаздывает, и в некоторых случаях он чувствует беспокойство.
[0047]
Соответственно, схема 44 настройки величины смещения управления устанавливает момент времени торможения раньше, чем момент времени активации тормоза, изученный при ручном вождении, чтобы уменьшить беспокойство, испытываемое водителем. Кроме того, в варианте осуществления, как описано выше, чувствительность вождения пассажира определяется на основе вариации данных изучения, частоты операции педали и частоты ускорения. Затем, чем выше чувствительность вождения водителя, тем больше величина Loff смещения.
[0048]
Когда вариация данных изучения (например, позиция операции торможения при остановке в предварительно определенной позиции остановки) является небольшой, можно предположить, что этот водитель всегда выполняет операцию торможения при поиске точности в позиции остановки и замедления при остановке. Другими словами, можно предположить, что водитель имеет высокую чувствительность вождения для вождения. Между тем, когда вариация велика, можно предположить, что этому водителю не важно, даже если позиция активации тормоза и замедление варьируются до некоторой степени. Другими словами, можно предположить, что водитель имеет низкую чувствительность вождения для вождения. Соответственно, чем меньше вариация данных изучения (чем выше чувствительность вождения), тем больше величина Loff смещения устанавливается для уменьшения беспокойства, испытываемого водителем.
[0049]
Кроме того, когда частота операций педали высока, можно предположить, что этот водитель остро реагирует на изменения скорости транспортного средства и выполняет операции для поддержания постоянной скорости транспортного средства. Другими словами, можно предположить, что водитель имеет высокую чувствительность вождения для вождения. Между тем, когда частота операций педали низкая, можно предположить, что водителю не важно, даже если скорость транспортного средства изменяется в некоторой степени. Другими словами, можно предположить, что водитель имеет низкую чувствительность вождения для вождения. Соответственно, чем выше частота операций педали (чем выше чувствительность вождения), тем больше величина Loff смещения устанавливается для уменьшения беспокойства, испытываемого водителем.
[0050]
Кроме того, когда высокая частота получается при частотном анализе данных ускорения, можно предположить, что этот водитель передвигается во время частого выполнения ускорения и замедления, и ведет транспортное средство, одновременно остро реагируя на изменения в окружающей среде. Другими словами, можно предположить, что водитель имеет высокую чувствительность вождения для вождения. Между тем, когда получается низкая частота в частотном анализе данных ускорения, можно предположить, что водитель не очень заботится об изменениях в окружающей среде. Другими словами, можно предположить, что водитель имеет низкую чувствительность вождения для вождения. Соответственно, чем выше частота, полученная при частотном анализе данных ускорения (чем выше чувствительность вождения), тем больше устанавливается величина Loff смещения, чтобы уменьшить беспокойство, испытываемое водителем.
[0051]
[Описание эффектов первого варианта осуществления]
Как описано выше, аппаратура помощи при вождении согласно первому варианту осуществления изучает момент времени торможения при ручном вождении и активирует тормоз при автоматическом вождении так, что момент времени, в который водитель воспринимает операцию торможения, является более ранним, чем изученный момент времени торможения. Соответственно, торможение может быть выполнено в момент времени, подходящий для водителя, и, таким образом, беспокойство, испытываемое водителем, может быть уменьшено.
[0052]
Кроме того, аппаратура помощи при вождении может изучить момент времени начала торможения, то есть момент времени, в который фактически активируется тормоз, или момент времени отпускания акселератора в качестве момента времени торможения при ручном вождении, и установить момент времени начала торможения при автоматическом вождении раньше, чем изученный момент времени начала торможения. Соответственно, тормоз может быть активирован в момент времени, подходящий для водителя, и, таким образом, беспокойство, испытываемое водителем, может быть дополнительно уменьшено.
[0053]
Кроме того, аппаратура помощи при вождении изучает момент времени, в который водитель начинает операцию педали тормоза, например, момент времени, в который величина операции (величина шага) педали тормоза достигает или превышает предварительно определенную величину операции торможения, установленную заранее, в качестве момента времени торможения при ручном вождении. Затем при автоматическом вождении аппаратура помощи при вождении активирует тормоз так, что момент времени, в который водитель воспринимает операцию торможения, является более ранним, чем момент времени, в который начинается операция педали тормоза. Соответственно, тормоз может быть активирован в момент времени, подходящий для водителя, и, таким образом, беспокойство, испытываемое водителем, может быть дополнительно уменьшено.
[0054]
Кроме того, аппаратура помощи при вождении изучает момент времени, в который водитель прекращает операцию педали акселератора, например момент времени, в который величина операции (величина шага) педали акселератора достигает или падает ниже предварительно определенной величины операции акселератора, установленной заранее в качестве момента времени торможения при ручном управлении. Затем при автоматическом вождении аппаратура помощи при вождении активирует тормоз так, что момент времени, в который водитель воспринимает операцию торможения, является более ранним, чем момент времени, в который операция педали акселератора прекращается. Соответственно, тормоз может быть активирован в момент времени, подходящий для водителя, и, таким образом, беспокойство, испытываемое водителем, может быть дополнительно уменьшено.
[0055]
Кроме того, чем выше скорость транспортного средства, тем раньше устанавливается момент времени торможения. Соответственно, момент времени торможения становится более ранним, когда транспортное средство передвигается на высокой скорости, и, таким образом, беспокойство, ощущаемое водителем, может быть уменьшено.
[0056]
Кроме того, аппаратура помощи при вождении обнаруживает чувствительность вождения при передвижении на основе данных вождения водителя при ручном вождении или данных действия водителя и устанавливает момент времени торможения на основе обнаруженной чувствительности вождения. Соответственно, подходящий момент времени торможения может быть установлен в зависимости от уровня чувствительности вождения каждого водителя при передвижении, и таким образом беспокойство, испытываемое водителем, может быть уменьшено.
[0057]
Кроме того, чем выше чувствительность вождения при передвижении, тем раньше устанавливается момент времени торможения. Соответственно, момент времени торможения устанавливается ранее для водителя, который проявляет большой интерес к передвижению транспортного средства (водитель с высокой чувствительностью вождения). Таким образом, беспокойство, испытываемое водителем, может быть уменьшено.
[0058]
Кроме того, аппаратура помощи вождения обнаруживает вариацию данных от данных в отношении операции вождения при ручном вождении и определяет, что чем больше эта вариация, тем выше чувствительность вождения при передвижении. Соответственно, чувствительность вождения водителя к передвижению может быть определена точно.
[0059]
Кроме того, устройство помощи при вождении обнаруживает частоту операции (задействования) педали, по меньшей мере, одной из педали акселератора и педали тормоза при ручном вождении и определяет, что чем выше частота операции педали, тем выше чувствительность вождения. Соответственно, чувствительность вождения водителя к поездке может быть точно определена.
[0060]
Кроме того, аппаратура помощи вождения анализирует частоту ускорения или скорость при ручном вождении и определяет, что чем больше высокочастотных компонентов, тем выше чувствительность вождения к передвижению. Соответственно, чувствительность вождения водителя к передвижению может быть точно определена.
[0061]
Кроме того, аппаратура помощи вождения изучает позицию (p1) активации тормоза в случае, когда основное транспортное средство останавливается в позиции остановки (P1 на фиг. 4A), такой как линия остановки, и устанавливает позицию позади этой позиции активации тормоза (позиция в отношении противоположной стороны к позиции остановки) в качестве позиции активации тормоза, когда транспортное средство подлежит остановке в позиции остановки при автоматическом вождении. Таким образом, торможение может быть выполнено в момент времени, подходящий для водителя. Соответственно, можно избежать случая, когда водитель воспринимает, что активация тормоза запаздывает, когда тормоз активируется при автоматическом вождении, и беспокойство, испытываемое водителем, может быть уменьшено.
[0062]
Кроме того, чем выше скорость транспортного средства, тем больше устанавливается расстояние смещения (Loff на фиг. 4A). Другими словами, чем выше скорость транспортного средства, тем дальше от позиции P1 остановки активируется тормоз. Соответственно, тормоз активируется в более ранний момент времени, когда транспортное средство передвигается с высокой скоростью, и беспокойство, испытываемое водителем, может быть уменьшено.
[0063]
Кроме того, настройка позиции остановки на линии остановки, представленной на дороге, может уменьшать беспокойство, испытываемое водителем, например, когда транспортное средство должно останавливаться на линии остановки, представленной на перекрестке или подобном.
[0064]
[Описание модифицированного примера первого варианта осуществления]
В вышеупомянутом первом варианте осуществления дано описание случая, когда аппаратура помощи в вождении изучает момент времени торможения при ручном вождении, активирует тормоз в такой момент времени, когда водитель воспринимает операцию торможения раньше, чем изученный момент времени торможения при автоматическом вождении и изменяет момент времени торможения в зависимости от чувствительности вождения водителя к передвижению.
[0065]
В модифицированном примере предварительно определенное время устанавливается заранее, и момент времени торможения при автоматическом вождении устанавливается равным моменту времени торможения, более раннему, чем момент времени торможения, изученный при ручном вождении, на это предварительно определенное время. Например, предварительно определенное время устанавливается в транспортном средстве или устанавливается на сервере вне транспортного средства посредством связи, и момент времени торможения устанавливается равным моменту торможения более раннему к установленному предварительно определенному времени. Таким образом, момент времени торможения при автоматическом вождении может быть установлен на момент времени раньше, чем момент времени торможения, полученный при ручном вождении, на это предварительно определенное время.
[0066]
В результате можно избежать случая, когда водитель воспринимает, что момент времени торможения запаздывает, когда при автоматическом вождении используется тормоз, и беспокойство, испытываемое водителем, может быть дополнительно уменьшено. Кроме того, поскольку момент времени торможения может быть установлен в простой операции по настройке заранее определенного времени, вычислительная нагрузка может быть уменьшена.
[0067]
Хотя способ помощи в передвижении транспортного средства и устройство помощи в передвижении транспортного средства в настоящем изобретении были описаны выше на основе варианта осуществления, проиллюстрированного на чертежах, настоящее изобретение не ограничивается этим, и конфигурация каждого блока может быть заменена любой конфигурацией с аналогичными функциями.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
[0068]
11 схема настройки характеристик автоматического вождения
12 схема определения характеристик передвижения
21 схема обнаружения условий передвижения
22 схема обнаружения окружающих условий
31 исполнительный механизм
41 схема изучения ручного вождения
42 схема настройки величины управления
43 схема настройки чувствительности водителя
44 схема настройки величины смещения управления
45 схема определения управления вождением
51 модуль управления приводом транспортного средства
52 модуль рулевого управления
100 устройство помощи в передвижении
411 запоминающее устройство.
Реферат
Изобретение относится к способу и устройству помощи в передвижении транспортного средства. Устройство помощи в передвижении транспортного средства включает в себя схему изучения ручного вождения и помогает в передвижении при автоматическом вождении на основе изученного момента времени торможения. Схема изучения ручного вождения сконфигурирована, чтобы изучать момент времени, в который водитель транспортного средства прекращает операцию педали акселератора, в качестве момента времени торможения транспортного средства при ручном вождении. Устройство помощи в передвижении транспортного средства дополнительно содержит схему управления приводом, сконфигурированную, чтобы при автоматическом вождении задействовать тормоз таким образом, чтобы момент времени, в который водитель воспринимает операцию торможения, был раньше, чем изученный момент времени торможения. Достигается повышение безопасности управления транспортным средством. 3 н. и 5 з.п. ф-лы, 10 ил.
Формула
Документы, цитированные в отчёте о поиске
Прогнозирующий человеко-машинный интерфейс с использованием технологии обнаружения взгляда, индикаторов "мертвых" зон и водительского опыта
Комментарии