Способ регулировки позиции переключателя и устройство для его реализации - RU2724521C1
Код документа: RU2724521C1
Чертежи




Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу регулировки позиции переключателя и функциональному устройству для транспортного средства.
Уровень техники
[0002] PTL 1 описывает устройство управления для автоматически приводимого в движение транспортного средства, которое имеет автоматический режим вождения и ручной режим вождения. В автоматически приводимом в движение транспортном средстве режим движения транспортного средства устанавливается в автоматический режим вождения, когда водитель выбирает автоматический режим вождения посредством действия, и устанавливается в ручной режим вождения, когда водитель не выбирает автоматический режим вождения.
Список ссылок
Патентная литература
[0003] PTL 1: JP 2015-051441 A
Сущность изобретения
Техническая задача
[0004] В автоматическом режиме вождения транспортному средству может быть инструктировано двигаться без операции вождения от водителя. По этой причине, водитель имеет возможность регулировать водительское сиденье и иногда сидит на водительском сиденье в позе, отличной от позы, когда режим движения является ручным режимом вождения, например, в значительной степени наклоняя спинку сиденья для водительского сиденья или в большой степени перемещая водительское сиденье назад.
Когда водитель изменяет свою позу между автоматическим режимом вождения и ручным режимом вождения таким образом, водитель иногда имеет затруднение в управлении переключателем режима для переключения режима движения транспортного средства между автоматическим режимом вождения и ручным режимом вождения. Например, когда водитель не может дотянуться до переключателя режима, в то время как опирается на наклоненную спинку сиденья, водителю требуется приподняться со спинки сиденья и задействовать переключатель режима.
Задачей настоящего изобретения является предотвращение ухудшения удобства использования переключателя режима для переключения режима движения транспортного средства между автоматическим режимом вождения и ручным режимом вождения в зависимости от позы водителя.
Решение задачи
[0005] Согласно аспекту настоящего изобретения, предоставляется способ регулировки позиции переключателя, в котором регулируется позиция переключателя режима для переключения режима движения транспортного средства между автоматическим режимом вождения, в котором движение транспортного средства управляется автоматическим образом, и ручным режимом вождения, в котором движение транспортного средства управляется водителем. В этом способе регулировки позиция переключателя режима регулируется согласно состоянию водительского сиденья, включающему в себя либо позицию водительского сиденья, либо наклон водительского сиденья.
[0006] Задача и преимущества изобретения могут реализовываться и достигаться посредством элементов и комбинаций, конкретно указанных в формуле изобретения. Следует понимать, что как вышеприведенное общее описание, так и нижеприведенное подробное описание являются примерными и пояснительными, а не ограничивающими изобретение.
Краткое описание чертежей
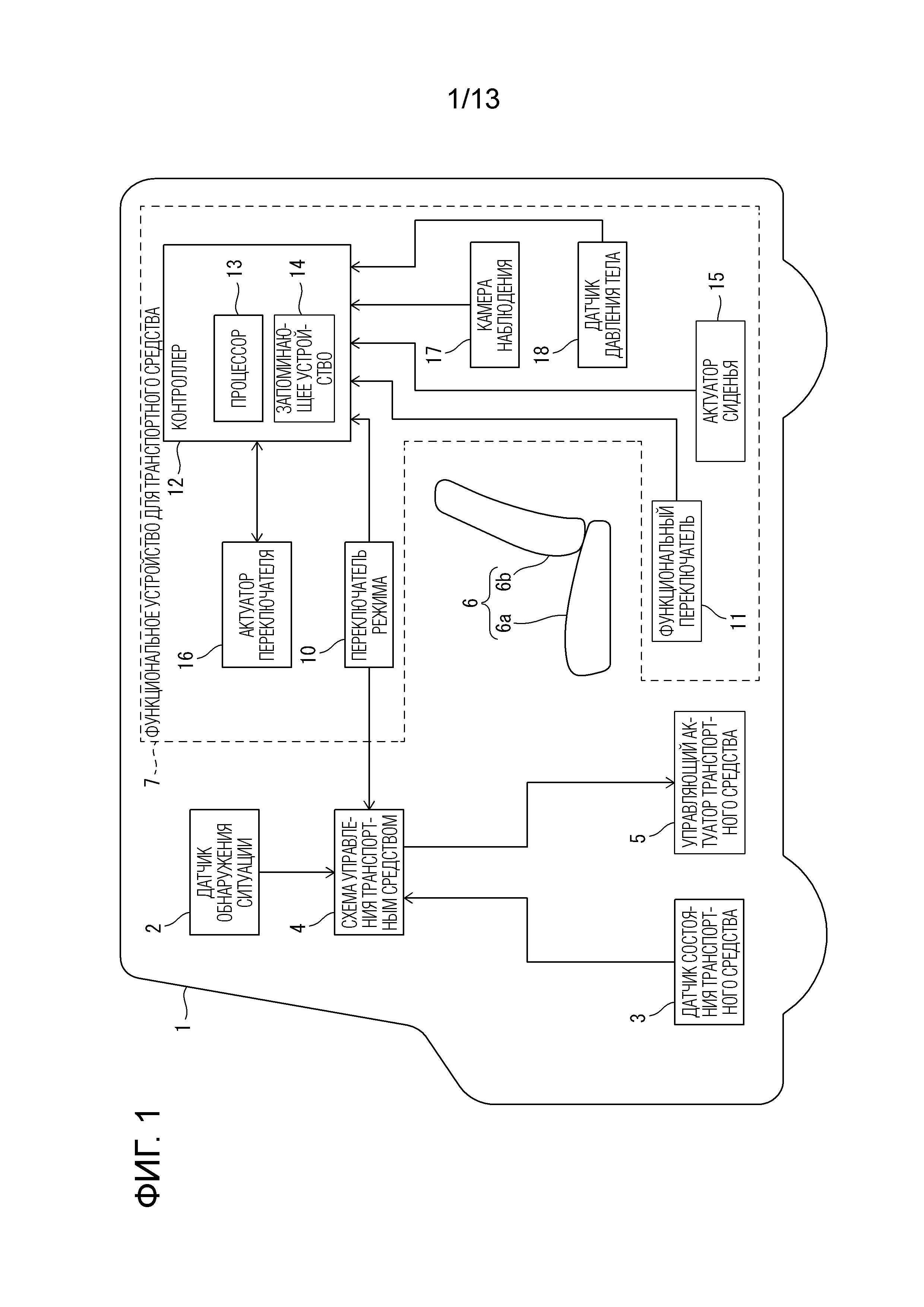
[0007] Фиг. 1 - это схема, иллюстрирующая пример конфигурации транспортного средства, включающего в себя функциональное устройство для транспортного средства согласно вариантам осуществления;
Фиг. 2 - это схема, иллюстрирующая пример функциональных переключателей;
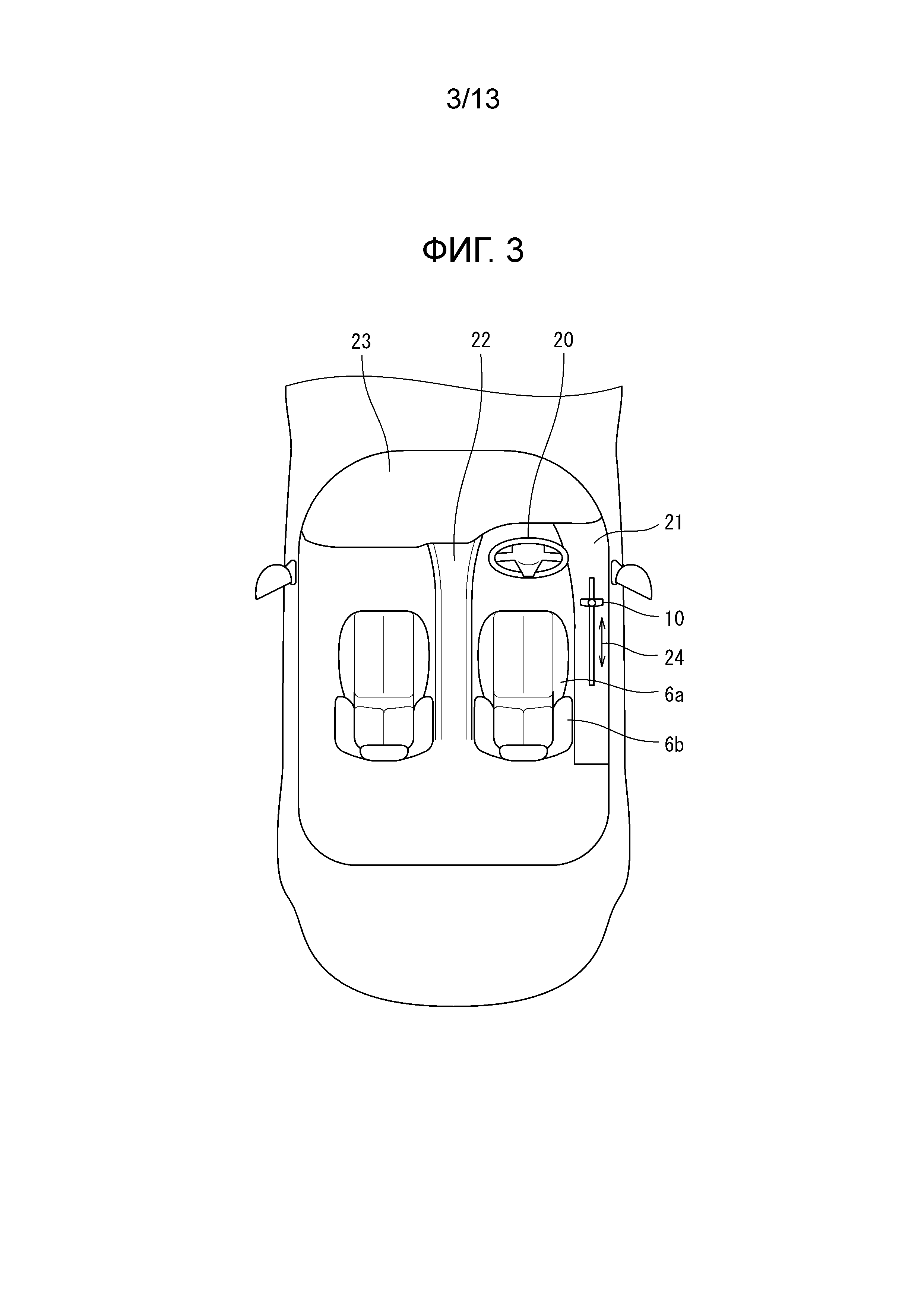
Фиг. 3 - это схема, иллюстрирующая первый пример переключателя режима;
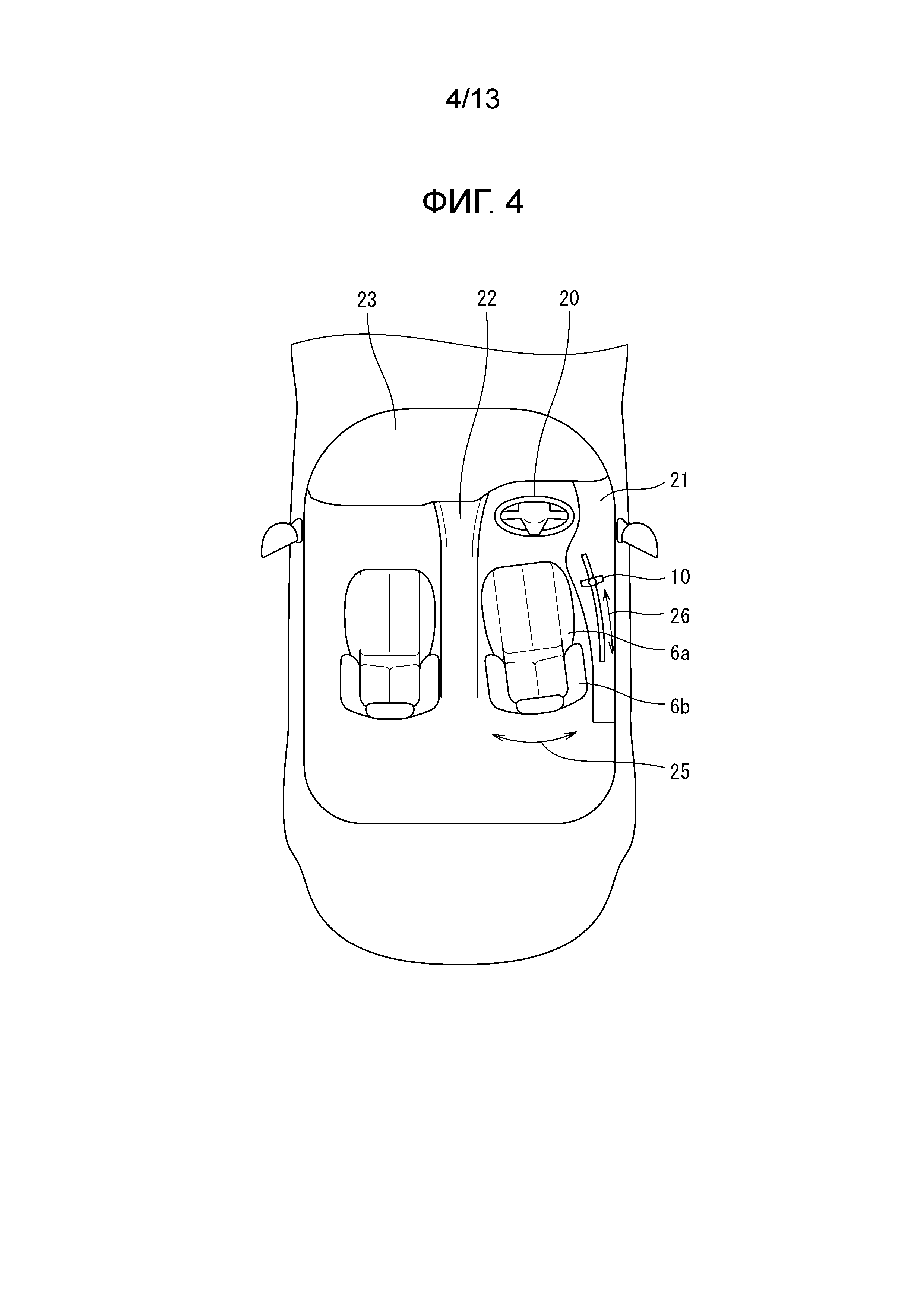
Фиг. 4 - это схема, иллюстрирующая второй пример переключателя режима;
Фиг. 5 - это схема, иллюстрирующая третий пример переключателя режима;
Фиг. 6 - это схема, иллюстрирующая четвертый пример переключателя режима;
Фиг. 7 - это блок-схема, иллюстрирующая пример функциональной конфигурации контроллера согласно первому варианту осуществления;
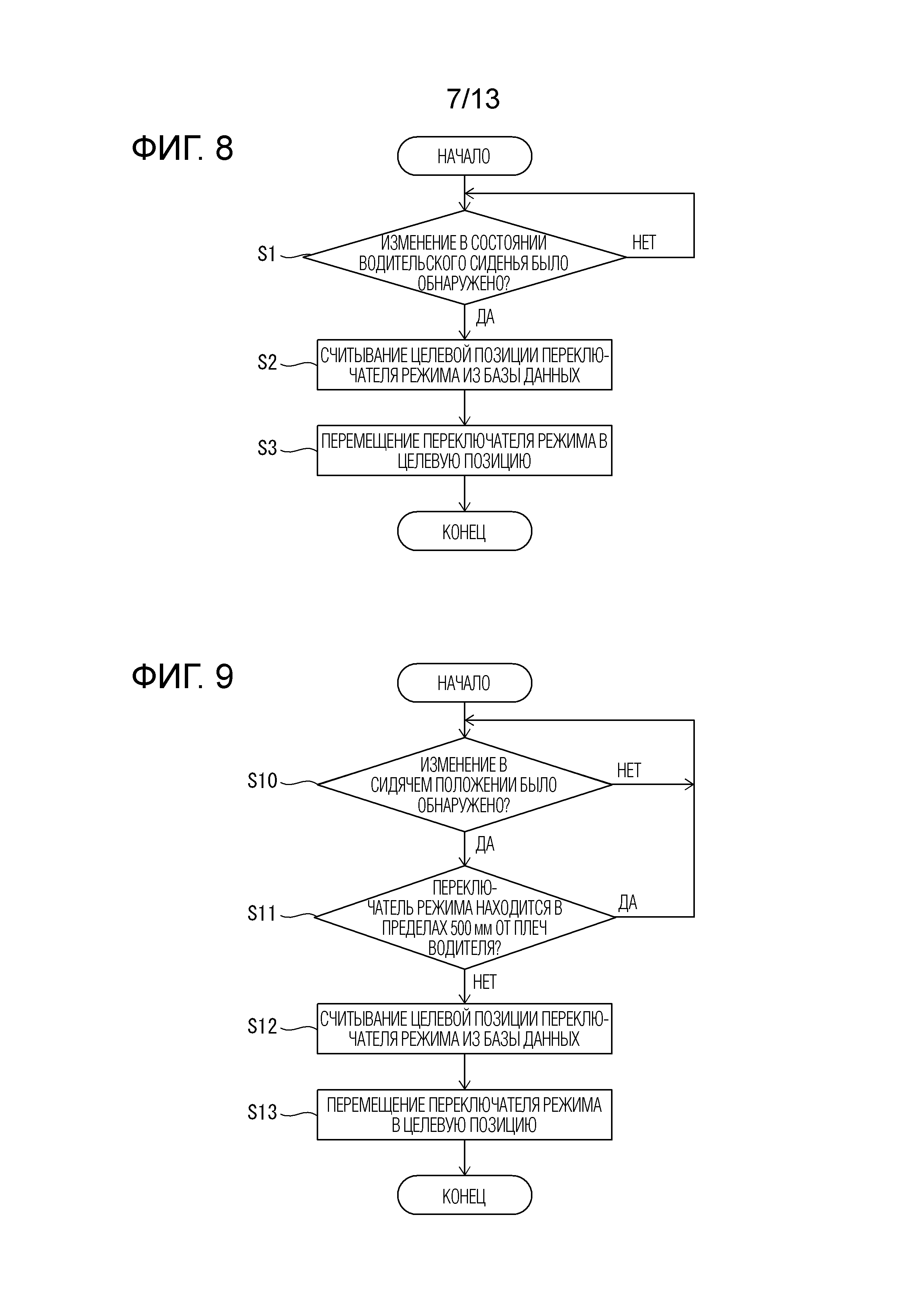
Фиг. 8 - это блок-схема последовательности операций первого примера способа для регулировки позиции переключателя согласно первому варианту осуществления;
Фиг. 9 - это блок-схема последовательности операций второго примера способа для регулировки позиции переключателя согласно первому варианту осуществления;
Фиг. 10 - это блок-схема, иллюстрирующая пример функциональной конфигурации контроллера согласно второму и третьему вариантам осуществления;
Фиг. 11 - это блок-схема последовательности операций, иллюстрирующая пример функционирования функционального устройства для транспортного средства согласно второму варианту осуществления;
Фиг. 12 - это блок-схема последовательности операций, иллюстрирующая пример функционирования функционального устройства для транспортного средства согласно третьему варианту осуществления;
Фиг. 13 - это блок-схема, иллюстрирующая пример функциональной конфигурации контроллера согласно четвертому варианту осуществления;
Фиг. 14A - это блок-схема последовательности операций (часть 1), иллюстрирующая пример функционирования функционального устройства для транспортного средства согласно четвертому варианту осуществления; и
Фиг. 14B - это блок-схема последовательности операций (часть 2), иллюстрирующая пример функционирования функционального устройства для транспортного средства согласно четвертому варианту осуществления.
Подробное описание вариантов осуществления
[0008] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
(Первый вариант осуществления)
(Конфигурация)
Обратимся теперь к фиг. 1. Транспортное средство 1 включает в себя датчики 2 обнаружения ситуации, датчики 3 состояния транспортного средства, схему 4 управления транспортным средством, управляющие актуаторы 5 транспортного средства, водительское сиденье 6 и функциональное устройство 7 для транспортного средства.
[0009] Датчики 2 обнаружения ситуации включают в себя датчики для обнаружения ситуации в окружении транспортного средства 1, которую требуется получать для автоматического вождения транспортного средства 1, выполняемого посредством схемы 4 управления транспортным средством. Например, датчики 2 обнаружения ситуации могут включать в себя камеры для обнаружения относительных позиций транспортного средства и другого транспортного средства, расстояния между транспортным средством 1 и другим транспортным средством, препятствия, присутствующего в окружении транспортного средства 1, белых линий на дороге в окружении транспортного средства 1 и т.п. Например, датчики 2 обнаружения ситуации могут включать в себя датчики дальности для обнаружения относительных позиций транспортного средства 1 и другого транспортного средства, расстояния между транспортным средством 1 и другим транспортным средством, препятствия, присутствующего в окружении транспортного средства 1, и т.п. Датчики дальности могут, например, быть лазерными дальномерами или сонарами.
Датчики 2 обнаружения ситуации выводят информацию об обнаруженной ситуации в окружении в схему 4 управления транспортным средством.
[0010] Датчики 3 состояния транспортного средства включают в себя датчики для обнаружения состояния движения транспортного средства 1 и датчики для обнаружения действия вождения, выполняемого водителем.
Например, датчики для обнаружения состояния движения транспортного средства 1 могут включать в себя датчик скорости транспортного средства, датчик ускорения и датчик поворота вокруг вертикальной оси. Например, датчики для обнаружения действия вождения, выполняемого водителем, могут включать в себя датчик степени открытия акселератора, переключатель тормоза и датчик величины срабатывания рулевого управления.
[0011] Датчик скорости транспортного средства обнаруживает скорость колеса транспортного средства 1 и, на основе скорости колеса, вычисляет скорость транспортного средства 1. Датчик ускорения обнаруживает ускорение в продольном направлении и ускорение в поперечном направлении транспортного средства для транспортного средства 1. Датчик поворота вокруг вертикальной оси обнаруживает поворот вокруг вертикальной оси (степени изменения угла поворота в направлении, в котором кузов транспортного средства поворачивает) для транспортного средства.
Датчик степени открытия акселератора обнаруживает степень открытия акселератора транспортного средства. Переключатель тормоза обнаруживает рабочее состояние действия торможения водителем в транспортном средстве. Датчик величины срабатывания рулевого управления обнаруживает величину срабатывания рулевого колеса транспортного средства. Датчик величины срабатывания рулевого управления может обнаруживать угол поворота управляемых колес как информацию о величине срабатывания рулевого колеса.
Датчики 3 состояния транспортного средства 1 выводят такую информацию о состоянии движения транспортного средства и такую информацию о действии вождения, выполняемом водителем, которые обнаруживаются посредством датчиков, в схему 4 управления транспортным средством.
[0012] Схема 4 управления транспортным средством является электронным блоком управления, который выполняет управление вождением транспортного средства. Схема 4 управления транспортным средством включает в себя процессор и периферийные компоненты, такие как запоминающее устройство.
Процессор может, например, быть центральным процессором (CPU) или микропроцессором (MPU). Запоминающее устройство может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства.
[0013] Запоминающее устройство может включать в себя регистр, кэш-память и память, такую как постоянное запоминающее устройство (ROM) и оперативное запоминающее устройство (RAM), которые используются в качестве основного запоминающего устройства.
Схема 4 управления транспортным средством может быть осуществлена посредством функциональной логической схемы, которая устанавливается в полупроводниковой интегральной схеме общего назначения. Например, схема 4 управления транспортным средством может включать в себя программируемое логическое устройство (PLD), такое как программируемая пользователем вентильная матрица (FPGA) и т.п.
[0014] Режимы движения транспортного средства 1, управляемые посредством схемы 4 управления транспортным средством, включают в себя ручной режим вождения и автоматический режим вождения.
В ручном режиме вождения схема 4 управления транспортным средством обнаруживает действие вождения, выполняемое водителем. Например, схема 4 управления транспортным средством обнаруживает действие вождения, выполняемое водителем, посредством датчиков 3 состояния транспортного средства. Схема 4 управления транспортным средством управляет режимом функционирования транспортного средства для транспортного средства в ответ на действие вождения, выполняемое водителем. Далее в данном документе режим движения транспортного средства 1 просто называется "режимом движения".
[0015] В автоматическом режиме вождения схема 4 управления транспортным средством формирует маршрут, по которому транспортному средству инструктируется двигаться, согласно ситуации в окружении транспортного средства 1, обнаруженной посредством датчиков 2 обнаружения ситуации, и состояния движения транспортного средства 1, обнаруженного посредством датчиков 3 состояния транспортного средства, и, на основе сформированного маршрута, инструктирует транспортному средству 1 двигаться автоматическим образом. По такому случаю, схема 4 управления транспортным средством приводит в действие управляющие актуаторы 5 транспортного средства таким способом, что транспортное средство 1 движется автономным образом согласно ситуации в окружении транспортного средства 1, обнаруживаемой посредством датчиков 2 обнаружения ситуации, и состояния движения транспортного средства 1, обнаруживаемого посредством датчиков 3 состояния транспортного средства.
[0016] Управляющие актуаторы 5 транспортного средства управляют рулевым колесом, степенью открытия акселератора и тормозным устройством транспортного средства 1 в ответ на управляющий сигнал от схемы 4 управления транспортным средством и, таким образом, формируют режим функционирования транспортного средства для транспортного средства 1. Управляющие актуаторы 5 транспортного средства включают в себя рулевой актуатор, актуатор степени открытия акселератора и актуатор управления тормозом.
Рулевой актуатор управляет направлением руления и величиной руления рулевого колеса транспортного средства 1. Актуатор степени открытия акселератора управляет степенью открытия акселератора транспортного средства 1. Актуатор управления тормозом управляет операцией торможения тормозного устройства транспортного средства 1.
[0017] Операция переключения режима движения между автоматическим режимом вождения и ручным режимом вождения подтверждается посредством функционального устройства 7 для транспортного средства.
Функциональное устройство 7 для транспортного средства также подтверждает операцию регулировки состояния водительского сиденья 6.
Функциональное устройство 7 для транспортного средства включает в себя переключатель 10 режима, функциональные переключатели 11, контроллер 12, актуаторы 15 сидений, актуатор 16 переключателя, камеру 17 наблюдения и датчики 18 давления тела. Отметим, что, на фиг. 1, переключатель режима и функциональный переключатель указываются как SW переключения режима и функциональный SW, соответственно.
[0018] Водительское сиденье 6 включает в себя подушку 6a сиденья, служащую в качестве фрагмента сиденья, на котором водитель сидит, и спинку 6b сиденья, служащую в качестве опоры для спины.
Состояние водительского сиденья 6 может включать в себя, по меньшей мере, одно из позиции водительского сиденья 6, наклона водительского сиденья 6 и углового положения водительского сиденья 6 в направлении вращения вокруг направления сверху вниз водительского сиденья 6 в качестве оси вращения.
[0019] Позиция водительского сиденья 6 может включать в себя, по меньшей мере, либо позицию водительского сиденья 6 в продольном направлении транспортного средства 1 (т.е., позицию подушки 6a сиденья или спинки 6b сиденья в продольном направлении), либо высоту подушки 6a сиденья.
Наклон водительского сиденья 6 может включать в себя, по меньшей мере, либо наклон поверхности для сидения подушки 6a сиденья относительно горизонтальной плоскости транспортного средства 1, либо наклон спинки 6b сиденья относительно вертикального направления транспортного средства 1.
[0020] Функциональные переключатели 11 располагаются на водительском сиденье 6 или по соседству с водительским сиденьем 6 и принимают действие водителя, чтобы регулировать состояние водительского сиденья 6.
Обратимся теперь к фиг. 2. Например, функциональные переключатели 11 могут быть расположены на боковой поверхности водительского сиденья 6. Функциональные переключатели 11 включают в себя переключатель 11a скользящего подъемника, переключатель 11b поворота, переключатель 11c откидывания и переключатель 11d настройки.
[0021] Переключатель 11a скользящего подъемника используется для изменения позиции водительского сиденья 6 в продольном направлении, изменения высоты подушки 6a сиденья и изменения наклона поверхности для сидения подушки 6a сиденья относительно горизонтальной плоскости транспортного средства 1.
Переключатель 11b поворота используется для поворота водительского сиденья 6 вокруг направления сверху вниз водительского сиденья 6 в качестве оси вращения.
Переключатель 11c откидывания используется для изменения наклона спинки 6b сиденья относительно вертикального направления транспортного средства 1.
Переключатель 11d настройки используется для принятия действия водителя, чтобы сохранять текущее состояние водительского сиденья 6 в функциональном устройстве 7 для транспортного средства.
[0022] Обратимся к фиг. 1 снова. Актуаторы 15 сиденья изменяют состояние водительского сиденья 6 в соответствии с воздействием на функциональные переключатели 11. Т.е., актуаторы 15 сиденья изменяют позицию водительского сиденья 6, наклон водительского сиденья 6 или угловое положение водительского сиденья 6 в направлении вращения вокруг направления сверху вниз водительского сиденья 6 в качестве оси вращения.
[0023] Переключатель 10 режима принимает действие водителя, чтобы переключать режим движения между автоматическим режимом вождения и ручным режимом вождения.
Позиция переключателя 10 режима регулируется согласно состоянию водительского сиденья 6, которое изменяется посредством актуаторов 15 сиденья, и регулировка позиции переключателя 10 режима приводится в действие посредством актуатора 16 переключателя.
Обратимся теперь к фиг. 3. Ссылочные номера 20, 21, 22 и 23 обозначают рулевое колесо транспортного средства 1, боковую консоль, которая располагается на стороне водительского сиденья транспортного средства 1, центральную консоль, которая располагается в середине в поперечном направлении транспортного средства для транспортного средства 1, и переднюю панель, которая обращена к водительскому сиденью и сиденью переднего пассажира, соответственно.
[0024] Например, переключатель 10 режима может быть расположен на боковой консоли 21 или центральной консоли 22.
Например, актуатор 16 переключателя может перемещать переключатель 10 режима в продольном направлении, как указано стрелкой 24, следуя или согласно перемещению водительского сиденья 6 в продольном направлении и наклону водительского сиденья 6.
Например, актуатор 16 переключателя может также перемещать переключатель 10 режима в двухмерной плоскости (т.е., в продольном направлении и поперечном направлении) таким способом, что переключатель 10 режима поворотно перемещается в направлении вращения, указанном стрелкой 26 на фиг. 4, следуя или согласно повороту водительского сиденья 6, указанному стрелкой 25 на фиг. 4.
Актуатор 16 переключателя может также перемещать переключатель 10 режима в направлении сверху вниз, следуя изменению или согласно высоте подушки 6a сиденья.
В таком случае, актуатор 16 переключателя является примером механизма перемещения, который перемещает переключатель 10 режима согласно состоянию водительского сиденья 6.
[0025] Переключатель 10 режима может быть расположен на водительском сиденье 6. Обратимся теперь к фиг. 5. Например, переключатель 10 режима может быть расположен на боковой поверхности водительского сиденья 6, которая обращена к боковой консоли 21. В таком случае, поскольку, когда водительское сиденье 6 поворачивается или перемещается в продольном направлении, переключатель 10 режима также перемещается в ассоциативной связи с поворотом или продольным перемещением, актуатор, который перемещает переключатель 10 режима согласно повороту водительского сиденья 6 или перемещению водительского сиденья 6 в продольном направлении, может быть исключен. Кроме того, поскольку, когда поверхность для сидения подушки 6a сиденья наклоняется, переключатель 10 режима также перемещается в ассоциативной связи с наклоном, актуатор, который перемещает переключатель 10 режима согласно наклону поверхности для сидения подушки 6a сиденья, может быть исключен.
В таком случае, актуатор 16 переключателя и актуаторы 15 сиденья являются примером механизма перемещения, который перемещает переключатель 10 режима согласно перемещению водительского сиденья 6.
[0026] Обратимся теперь к фиг. 6. Например, переключатель 10 режима может быть расположен в подлокотнике 6c водительского сиденья 6. В таком случае, поскольку, когда водительское сиденье 6 поворачивается или перемещается в продольном направлении, переключатель 10 режима также перемещается в ассоциативной связи с поворотом или продольным перемещением, актуатор, который перемещает переключатель 10 режима согласно повороту водительского сиденья 6 или перемещению водительского сиденья 6 в продольном направлении, может быть исключен. Кроме того, поскольку, когда спинка 6b сиденья наклоняется, переключатель 10 режима также перемещается в ассоциативной связи с наклоном, актуатор, который перемещает переключатель 10 режима согласно наклону спинки 6b сиденья, может быть исключен.
[0027] Обратимся к фиг. 1 снова. Актуаторы 15 сиденья выводят обнаруженные сигналы о состоянии водительского сиденья 6 в контроллер 12.
Например, актуаторы 15 сиденья выводят обнаруженные сигналы позиций подушки 6a сиденья и спинки 6b сиденья в продольном направлении, обнаруженный сигнал наклона поверхности для сидения подушки 6a сиденья относительно горизонтальной плоскости транспортного средства 1, обнаруженный сигнал наклона спинки 6b сиденья относительно вертикального направления транспортного средства 1 и обнаруженный сигнал углового положения водительского сиденья 6 в контроллер 12.
Актуатор 16 переключателя выводит обнаруженный сигнал позиции переключателя 10 режима в контроллер 12.
[0028] Контроллер 12 является электронным блоком управления, который управляет состоянием водительского сиденья 6 и позицией переключателя 10 режима. Контроллер 12 включает в себя процессор 13 и периферийные компоненты, такие как запоминающее устройство 14.
Процессор 13 может, например, быть CPU или MPU. Запоминающее устройство 14 может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства.
Запоминающее устройство 14 может включать в себя регистр, кэш-память и память, такую как ROM и RAM, которые используются в качестве основного запоминающего устройства.
Контроллер 12 может быть осуществлен посредством функциональной логической схемы, которая устанавливается в полупроводниковой интегральной схеме общего назначения. Например, контроллер 12 может включать в себя PLD, такое как FPGA, и т.п.
[0029] Контроллер 12 приводит в действие актуаторы 15 сиденья в соответствии с операцией регулировки состояния водительского сиденья 6, принятой посредством функциональных переключателей 11, и, тем самым, изменяет состояние водительского сиденья 6. Контроллер 12 также приводит в действие актуатор 16 переключателя таким способом, что переключатель 10 режима перемещается согласно изменению в состоянии водительского сиденья 6, вызванному посредством актуаторов 15 сиденья.
[0030] Контроллер 12 обнаруживает сидячее положение водителя, который сидит на водительском сиденье 6, и приводит в действие актуатор 16 переключателя таким способом, что переключатель 10 режима перемещается согласно сидячему положению.
Камера 17 наблюдения захватывает изображение водителя, сидящего на водительском сиденье 6, и выводит сигнал изображения водителя в контроллер 12.
Датчики 18 давления тела размещаются в поверхности для сидения подушки 6a сиденья и спинке 6b сиденья и обнаруживают распределение давления тела водителя, преобразуя давление согласно позе водителя для вождения в сигнал напряжения. Датчики 18 давления тела выводят сигнал распределения давления тела водителя в контроллер 12.
Контроллер 12 обнаруживает сидячее положение водителя, на основе сигнала изображения водителя, сформированного камерой 17 наблюдения, распределения давления тела водителя, обнаруженного датчиками 18 давления тела, и состояния водительского сиденья 6.
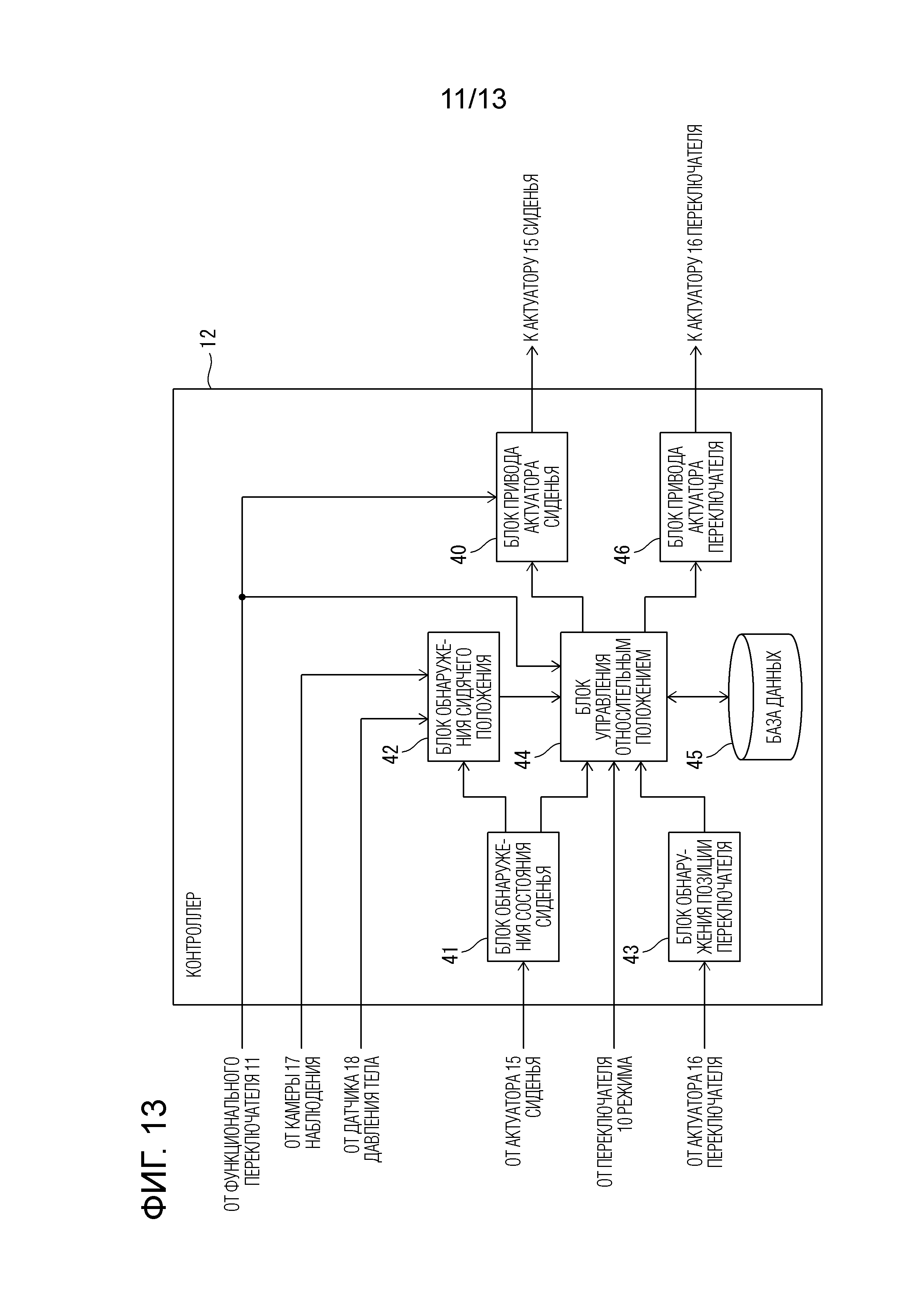
[0031] Обратимся теперь к фиг. 7. Контроллер 12 включает в себя блок 40 привода актуатора сиденья, блок 41 обнаружения состояния сиденья, блок 42 обнаружения сидячего положения, блок 43 обнаружения позиции переключателя, блок 44 управления относительным положением, базу данных 45 и блок 46 привода актуатора переключателя.
Процессор 13 контроллера 12 осуществляет функции блока 40 привода актуатора сиденья, блока 41 обнаружения состояния сиденья, блока 42 обнаружения сидячего положения, блока 43 обнаружения позиции переключателя, блока 44 управления относительным положением и блока 46 привода актуатора переключателя, исполняя компьютерную программу, сохраненную в запоминающем устройстве 14.
База данных 45 хранится в запоминающем устройстве 14.
[0032] Блок 40 привода актуатора сиденья принимает сигнал срабатывания, выводимый от функциональных переключателей 11 в ответ на действие, выполняемое водителем, чтобы регулировать состояние водительского сиденья 6. Блок 40 привода актуатора сиденья приводит в действие актуаторы 15 сиденья в соответствии с сигналом срабатывания, принятым от функциональных переключателей 11, и, тем самым, изменяет состояние водительского сиденья 6.
Блок 41 обнаружения состояния сиденья принимает обнаруженные сигналы состояния водительского сиденья 6 от актуаторов 15 сиденья. Блок 41 обнаружения состояния сиденья обнаруживает состояние водительского сиденья 6 на основе принятых обнаруженных сигналов. Блок 41 обнаружения состояния сиденья выводит информацию о состоянии водительского сиденья 6 в блок 42 обнаружения сидячего положения и блок 44 управления относительным положением. Соответственно, блок 41 обнаружения состояния сиденья выводит состояние водительского сиденья 6, таким образом, выводит то, изменилось или нет состояние водительского сиденья 6.
[0033] Блок 42 обнаружения сидячего положения принимает сигнал изображения водителя, сформированный камерой 17 наблюдения, и сигнал распределения давления тела водителя, обнаруженный датчиками 18 давления тела.
Блок 42 обнаружения сидячего положения обнаруживает сидячее положение водителя, сидящего на водительском сиденье 6, на основе сигнала изображения водителя, сформированного камерой 17 наблюдения, распределения давления тела водителя, обнаруженного датчиками 18 давления тела, и состояния водительского сиденья 6, обнаруженного посредством блока 41 обнаружения состояния сиденья. Например, блок 42 обнаружения сидячего положения может обнаруживать положение плеч водителя в качестве сидячего положения водителя.
Блок 42 обнаружения сидячего положения выводит информацию о сидячем положении в блок 44 управления относительным положением.
[0034] Блок 43 обнаружения позиции переключателя принимает обнаруженный сигнал позиции переключателя 10 режима от актуатора 16 переключателя. Блок 43 обнаружения позиции переключателя обнаруживает позицию переключателя 10 режима на основе принятого обнаруженного сигнала. Блок 43 обнаружения позиции переключателя выводит позиционную информацию о переключателе 10 режима в блок 44 управления относительным положением.
[0035] Когда блок 44 управления относительным положением обнаруживает состояние водительского сиденья 6, блок 44 управления относительным положением считывает целевую позицию переключателя 10 режима, соответствующую изменившемуся состоянию водительского сиденья 6, из базы данных 45, которая предварительно определяется согласно состоянию водительского сиденья 6.
Блок 44 управления относительным положением управляет блоком 46 привода актуатора переключателя таким способом, что позиция, указанная посредством позиционной информации для переключателя 10 режима, введенной из блока 43 обнаружения позиции переключателя, совпадает с целевой позицией, считанной из базы данных 45. Блок 46 привода актуатора переключателя приводит в действие актуатор 16 переключателя в ответ на управляющий сигнал от блока 44 управления относительным положением. Посредством этой операции блок 44 управления относительным положением регулирует позицию переключателя 10 режима согласно изменившемуся состоянию водительского сиденья 6. Например, блок 44 управления относительным положением перемещает переключатель 10 режима таким способом, что позиция переключателя 10 режима следует за изменением в состоянии водительского сиденья 6.
[0036] Например, целевая позиция переключателя 10 режима, сохраненная в базе данных 45, может быть задана таким способом, что, чем дальше назад позиционируется подушка 6a сиденья, тем дальше назад располагается целевая позиция переключателя 10 режима. Т.е., когда подушка 6a сиденья перемещается в продольном направлении, блок 44 управления относительным положением перемещает позицию переключателя 10 режима дальше назад, когда подушка 6a сиденья позиционируется дальше назад.
[0037] Например, целевая позиция переключателя 10 режима, сохраненная в базе данных 45, может также быть задана таким способом, что, чем дальше вниз наклоняется поверхность для сидения подушки 6a сиденья от передней стороны к задней стороне, тем дальше вниз располагается целевая позиция переключателя 10 режима. Т.е., когда наклон поверхности для сидения подушки 6a сиденья изменяется, блок 44 управления относительным положением перемещает позицию переключателя 10 режима дальше назад, когда передняя сторона поверхности для сидения подушки 6a сиденья наклоняется больше вниз.
[0038] Например, целевая позиция переключателя 10 режима, сохраненная в базе данных 45, может также быть задана таким способом, что, чем дальше назад позиционируется спинка 6b сиденья, тем дальше назад располагается целевая позиция переключателя 10 режима. Т.е., когда спинка 6b сиденья перемещается в продольном направлении, блок 44 управления относительным положением перемещает позицию переключателя 10 режима дальше назад, когда спинка 6b сиденья позиционируется дальше назад.
[0039] Например, целевая позиция переключателя 10 режима, сохраненная в базе данных 45, может также быть задана таким способом, что, чем сильнее спинка 6b сиденья транспортного средства 1 наклоняется назад относительно вертикального направления спинки 6b сиденья, тем дальше назад располагается целевая позиция переключателя 10 режима. Т.е., когда наклон спинки 6b сиденья изменяется, блок 44 управления относительным положением перемещает позицию переключателя 10 режима дальше назад, когда спинка 6b сиденья наклоняется еще больше.
[0040] Когда блок 44 управления относительным положением обнаруживает изменение в сидячем положении водителя, сидящего на водительском сиденье 6, блок 44 управления относительным положением считывает целевую позицию переключателя 10 режима, соответствующую изменившемуся сидячему положению, из базы данных 45, хранящей целевые позиции переключателя 10 режима, предварительно определенные согласно сидячим положениям.
Например, когда переключатель 10 режима не присутствует в пределах предварительно определенного расстояния от плеч водителя, обнаруженных в качестве сидячего положения водителя, или сидячего положения водителя, блок 44 управления относительным положением может считывать целевую позицию переключателя 10 режима из базы данных 45. Когда переключатель 10 режима присутствует в пределах предварительно определенного расстояния от плеч водителя, переключатель 10 режима не должен перемещаться. Предварительно определенное расстояние может быть равно, например, 500 мм. Отметим, что сидячее положение не всегда должно быть центром, а должно лишь быть предварительно определенным положением. Когда сидячее положение устанавливается в предварительно определенное положение, предварительно определенная база данных, соответствующая положению, может быть использована.
[0041] Блок 44 управления относительным положением управляет блоком 46 привода актуатора переключателя таким способом, что позиция, указанная посредством позиционной информации для переключателя 10 режима, введенной из блока 43 обнаружения позиции переключателя, совпадает с целевой позицией, считанной из базы данных.
Например, целевая позиция переключателя 10 режима, сохраненная в базе данных 45, может быть задана таким способом, что, чем дальше назад располагается сидячее положение, тем дальше назад располагается целевая позиция переключателя 10 режима. Т.е., блок 44 управления относительным положением перемещает позицию переключателя 10 режима дальше назад, когда сидячее положение располагается дальше назад.
[0042] (Работа)
Будет описан первый пример способа регулировки позиции переключателя согласно первому варианту осуществления. Обратимся теперь к фиг. 8.
На этапе S1 блок 44 управления относительным положением определяет, обнаружил или нет блок 44 управления относительным положением изменение в состоянии водительского сиденья 6. Когда блок 44 управления относительным положением обнаружил изменение в состоянии водительского сиденья 6 (Y на этапе S1), процесс переходит к этапу S2. Когда блок 44 управления относительным положением не обнаружил изменение в состоянии водительского сиденья 6 (N на этапе S1), процесс возвращается к этапу S1.
[0043] На этапе S2 блок 44 управления относительным положением обнаруживает изменившееся состояние водительского сиденья 6 и считывает целевую позицию переключателя 10 режима, соответствующую изменившемуся состоянию водительского сиденья 6, из базы данных 45.
На этапе S3 блок 44 управления относительным положением управляет блоком 46 привода актуатора переключателя таким способом, что позиция, указанная посредством позиционной информации для переключателя 10 режима, введенной из блока 43 обнаружения позиции переключателя, совпадает с целевой позицией, считанной из базы данных 45. Посредством этой операции блок 44 управления относительным положением перемещает переключатель 10 режима в целевую позицию.
[0044] Со ссылкой на фиг. 9 будет описан второй пример способа регулировки позиции переключателя согласно первому варианту осуществления.
На этапе S10 блок 44 управления относительным положением определяет, обнаружил или нет блок 44 управления относительного положения изменение в сидячем положении водителя, сидящего на водительском сиденье 6. Когда блок 44 управления относительным положением обнаружил изменение в сидячем положении (Y на этапе S10), процесс переходит к этапу S11. Когда блок 44 управления относительным положением не обнаружил изменение в сидячем положении (N на этапе S10), процесс возвращается к этапу S10.
[0045] На этапе S11 блок 44 управления относительным положением определяет, присутствует или нет переключатель 10 режима в диапазоне 500 мм от плеч водителя. Когда переключатель 10 режима присутствует в диапазоне 500 мм от плеч водителя (Y на этапе S11), процесс возвращается к этапу S10. Когда переключатель 10 режима не присутствует в диапазоне 500 мм от плеч водителя (N на этапе S11), процесс переходит к этапу S12.
[0046] На этапе S12 блок 44 управления относительным положением считывает целевую позицию переключателя 10 режима, соответствующую изменившемуся сидячему положению, из базы данных 45.
На этапе S13 блок 44 управления относительным положением управляет блоком 46 привода актуатора переключателя таким способом, что позиция, указанная посредством позиционной информации для переключателя 10 режима, введенной из блока 43 обнаружения позиции переключателя, совпадает с целевой позицией, считанной из базы данных 45. Посредством этой операции блок 44 управления относительным положением перемещает переключатель 10 режима в целевую позицию.
[0047] (Преимущества первого варианта осуществления)
(1) Блок 44 управления относительным положением перемещает переключатель 10 режима для переключения режима движения транспортного средства 1 между автоматическим режимом вождения, в котором движение транспортного средства 1 управляется автоматическим образом, и ручным режимом вождения, в котором движением транспортного средства 1 управляет водитель, согласно состоянию водительского сиденья 6, измененного посредством актуаторов 15 сиденья.
Эта операция предоставляет возможность предотвращения ухудшения удобства использования переключателя 10 режима, который переключает режим движения транспортного средства между автоматическим режимом движения и ручным режимом движения, в зависимости от позы водителя.
[0048] (2) Блок 41 обнаружения состояния сиденья обнаруживает позицию подушки 6a сиденья для водительского сиденья в качестве состояния водительского сиденья 6, и блок 44 управления относительным положением регулирует позицию переключателя 10 режима дальше назад, когда позиция подушки 6a сиденья располагается дальше назад.
Эта операция предоставляет возможность регулировки позиции переключателя 10 режима согласно позиции подушки 6a сиденья в продольном направлении, что предоставляет возможность предотвращения ухудшения удобства использования переключателя режима, даже когда позиция подушки 6a сиденья в продольном направлении изменяется.
[0049] (3) Блок 41 обнаружения состояния сиденья обнаруживает наклон подушки 6a сиденья водительского сиденья в качестве состояния водительского сиденья 6, и блок 44 управления относительным положением регулирует позицию переключателя 10 режима дальше назад, когда поверхность для сидения подушки 6a сиденья наклоняется дальше вниз от передней стороны к задней стороне.
Эта операция предоставляет возможность регулировки позиции переключателя 10 режима согласно наклону подушки 6a сиденья, что предоставляет возможность предотвращения ухудшения удобства использования переключателя 10 режима, даже когда наклон подушки 6a сиденья изменяется.
[0050] (4) Блок 41 обнаружения состояния сиденья обнаруживает позицию спинки 6b сиденья для водительского сиденья в качестве состояния водительского сиденья 6, и блок 44 управления относительным положением регулирует позицию переключателя 10 режима дальше назад, когда позиция спинки 6b сиденья располагается дальше назад.
Эта операция предоставляет возможность регулировки позиции переключателя 10 режима согласно позиции спинки 6b сиденья в продольном направлении, что предоставляет возможность предотвращения ухудшения удобства использования переключателя 10 режима, даже когда позиция спинки 6b сиденья в продольном направлении изменяется.
[0051] (5) Блок 41 обнаружения состояния сиденья обнаруживает наклон спинки 6b сиденья для водительского сиденья в качестве состояния водительского сиденья 6, и блок 44 управления относительным положением регулирует позицию переключателя 10 режима дальше назад, когда наклон спинки 6b сиденья относительно вертикального направления транспортного средства 1 увеличивается.
Эта операция предоставляет возможность регулировки позиции переключателя 10 режима согласно наклону спинки 6b сиденья, что предоставляет возможность предотвращения затруднения управления переключателем 10 режима, даже когда наклон спинки 6b сиденья изменяется.
[0052] (6) Блок 42 обнаружения сидячего положения обнаруживает сидячее положение водителя, сидящего на водительском сиденье 6. Блок 44 управления относительным положением регулирует позицию переключателя 10 режима дальше назад, когда сидячее положение располагается дальше назад.
Эта операция предоставляет возможность регулировки позиции переключателя 10 режима согласно сидячему положению водителя, что предоставляет возможность предотвращения затруднения управления переключателем 10 режима, даже когда сидячее положение водителя изменяется.
[0053] (7) Переключатель 10 режима размещается на центральной консоли 22 транспортного средства 1. Эта конфигурация может предотвращать загораживание пространства в поездке для водителя вследствие установки переключателя 10 режима.
(8) Переключатель 10 режима размещается на водительском сиденье 6. Эта конфигурация может предотвращать загораживание пространства в поездке для водителя вследствие установки переключателя 10 режима.
(9) Переключатель 10 режима размещается на боковой консоли 21 транспортного средства 1. Эта конфигурация может предотвращать загораживание пространства в поездке для водителя вследствие установки переключателя 10 режима.
[0054] (Второй вариант осуществления)
Далее будет описано функциональное устройство 7 для транспортного средства согласно второму варианту осуществления. Функциональное устройство 7 для транспортного средства согласно второму варианту осуществления переключает состояния водительского сиденья 6 в зависимости от того, является ли режим движения автоматическим режимом вождения или ручным режимом вождения.
Например, функциональное устройство 7 для транспортного средства устанавливает наклон назад для спинки 6b сиденья относительно вертикального направления транспортного средства 1, когда режим движения является автоматическим режимом вождения, больше наклона назад спинки 6b сиденья, когда режим движения является ручным режимом вождения.
Например, функциональное устройство 7 для транспортного средства устанавливает позицию подушки 6a сиденья в продольном направлении, когда режим движения является автоматическим режимом вождения, расположенной дальше назад, чем позиция подушки 6a сиденья, когда режим движения является ручным режимом вождения.
Этак конфигурация вызывает регулировку состояния водительского сиденья 6 в ответ на переключение режима движения посредством переключателя 10 режима, что предоставляет возможность улучшения комфорта для водителя.
[0055] Обратимся теперь к фиг. 10. Блок 44 управления относительным положением принимает сигнал выбора, указывающий, выбран ли автоматический режим вождения или ручной режим вождения в качестве текущего режима движения, от переключателя 10 режима.
Когда режим движения является автоматическим режимом вождения, блок 44 управления относительным положением регулирует наклон спинки 6b сиденья относительно вертикального направления транспортного средства 1 на относительно большой угол. Блок 44 управления относительным положением также регулирует позицию подушки 6a сиденья в продольном направлении в относительно заднюю позицию.
Когда режим движения является ручным режимом вождения, блок 44 управления относительным положением регулирует наклон спинки 6b сиденья относительно вертикального направления транспортного средства 1 на относительно небольшой угол. Блок 44 управления относительным положением также регулирует позицию подушки 6a сиденья в продольном направлении в относительно переднюю позицию.
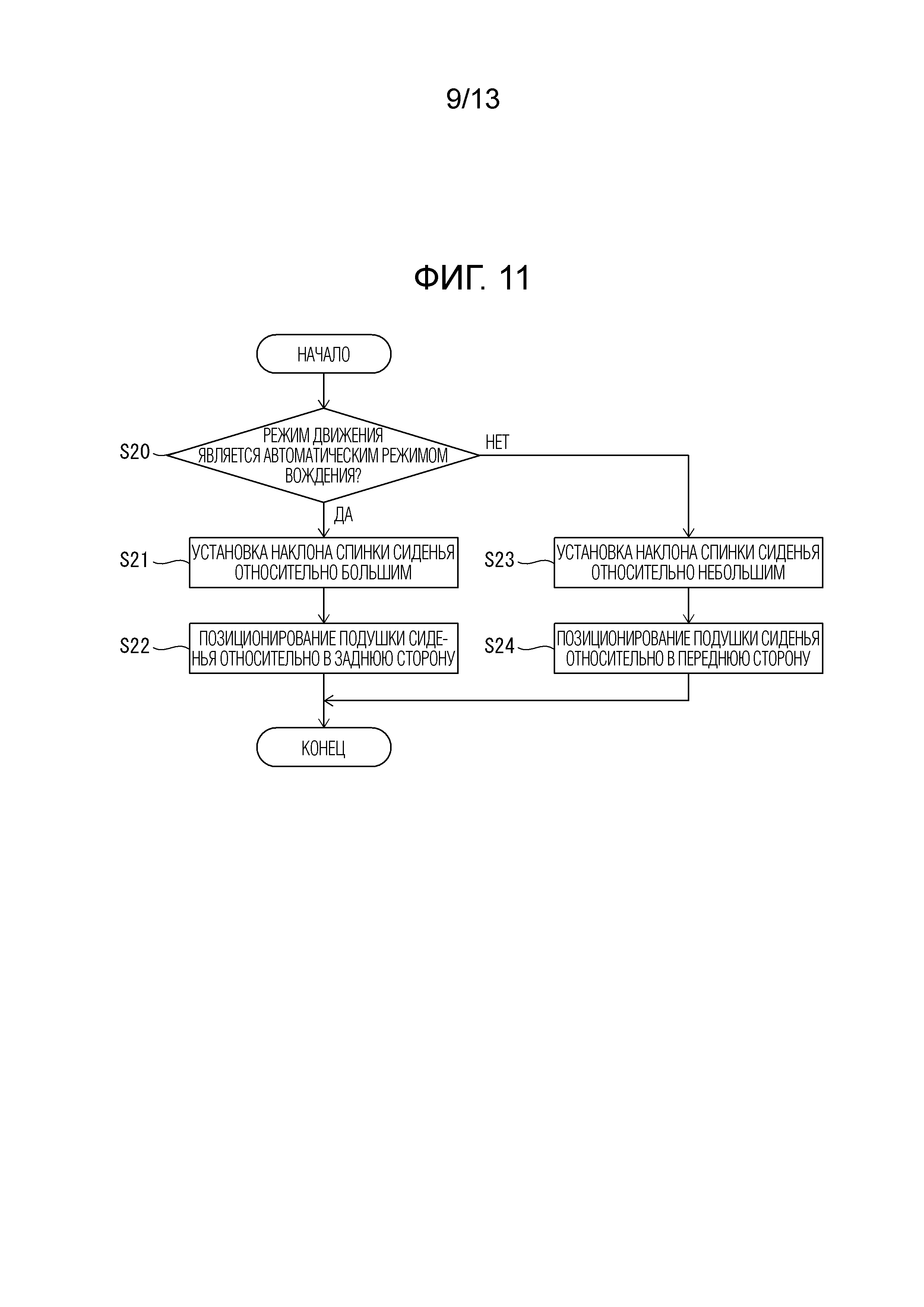
[0056] Далее будет описан пример функционирования функционального устройства 7 для транспортного средства согласно второму варианту осуществления.
Обратимся теперь к фиг. 11.
На этапе S20 блок 44 управления позицией определяет, является или нет режим движения автоматическим режимом вождения. Когда режим движения является автоматическим режимом вождения (Y на этапе S20), процесс переходит к этапу S21. Когда режим движения не является автоматическим режимом вождения, т.е., когда режим движения является ручным режимом вождения (N на этапе S20), процесс переходит к этапу S23.
На этапе S21 блок 44 управления относительным положением регулирует наклон спинки 6b сиденья относительно вертикального направления транспортного средства 1 на относительно большой угол.
На этапе S22 блок 44 управления относительным положением регулирует позицию подушки 6a сиденья в продольном направлении в относительно заднюю позицию.
Затем операция заканчивается.
[0057] На этапе S23 блок 44 управления относительным положением регулирует наклон спинки 6b сиденья относительно вертикального направления транспортного средства 1 на относительно небольшой угол.
На этапе S24 блок 44 управления относительным положением регулирует позицию подушки 6a сиденья в продольном направлении в относительно переднюю позицию.
Затем операция заканчивается.
[0058] (Преимущества второго варианта осуществления)
(1) Блок 44 управления относительным положением переключает наклоны спинки 6b сиденья относительно вертикального направления транспортного средства 1 в зависимости от того, является ли режим движения автоматическим режимом вождения или ручным режимом вождения. Блок 44 управления относительным положением устанавливает наклон спинки 6b сиденья, когда режим движения является автоматическим режимом движения, чтобы он был больше наклона спинки 6b сиденья, когда режим движения является ручным режимом движения.
Этак конфигурация вызывает регулировку наклона спинки 6b сиденья в ответ на переключение режима движения посредством переключателя 10 режима, что предоставляет возможность улучшения комфорта для водителя.
[0059] (2) Блок 44 управления относительным положением переключает позиции подушки 6a сиденья в зависимости от того, является ли режим движения автоматическим режимом движения или ручным режимом движения. Блок 44 управления относительным положением устанавливает позицию подушки 6a сиденья, когда режим движения является автоматическим режимом вождения, чтобы она находилась дальше назад, чем позиция подушки 6a сиденья, когда режим движения является ручным режимом вождения.
Эта конфигурация вызывает регулировку позиции подушки 6a сиденья в ответ на переключение режима движения посредством переключателя 10 режима, что предоставляет возможность улучшения комфорта для водителя.
[0060] (Третий вариант осуществления)
Далее будет описано функциональное устройство 7 для транспортного средства согласно третьему варианту осуществления. Функциональное устройство 7 для транспортного средства согласно третьему варианту осуществления сохраняет состояние водительского сиденья 6, которое было отрегулировано, в то время как режим движения является ручным режимом вождения, прежде чем режим движения переключится с ручного режима вождения на автоматический режим вождения. Функциональное устройство 7 для транспортного средства также сохраняет состояние водительского сиденья 6, которое было отрегулировано, в то время как режим движения является автоматическим режимом вождения. Состояние водительского сиденья 6 может быть выполнено с возможностью быть сохраненным, прежде чем режим движения переключится с автоматического режима вождения на ручной режим вождения. В последующем третьем варианте осуществления будет описан случай, когда состояние водительского сиденья 6 сохраняется в момент времени перед тем, как режим движения переключается с автоматического режима вождения на ручной режим вождения.
[0061] Когда режим движения переключается с ручного режима вождения на автоматический режим вождения, функциональное устройство 7 для транспортного средства регулирует состояние водительского сиденья 6 в состояние, сохраненное, когда режим движения был автоматическим режимом вождения. Когда режим движения переключается с автоматического режима вождения на ручной режим вождения, функциональное устройство 7 для транспортного средства регулирует состояние водительского сиденья 6 в состояние, сохраненное, когда режим движения был ручным режимом вождения.
Эта конфигурация предоставляет возможность регулировки состояния водительского сиденья 6 в соответствии с предпочтением водителя, когда режим движения переключается. Эта возможность позволяет снизить усилия по регулировке сиденья водителем.
[0062] Функциональная конфигурация контроллера 12 функционального устройства 7 для транспортного средства согласно третьему варианту осуществления является такой же, что и функциональная конфигурация второго варианта осуществления, иллюстрированная на фиг. 10.
Блок 44 управления относительным положением принимает сигнал выбора, указывающий, выбран ли автоматический режим вождения или ручной режим вождения в качестве текущего режима движения, от переключателя 10 режима. Блок 44 управления относительным положением определяет, был или нет переключен режим движения, на основе сигнала выбора, принятого от переключателя 10 режима.
[0063] Когда режим движения был переключен с автоматического режима вождения на ручной режим вождения, другими словами, когда режим движения перед переключением был автоматическим режимом вождения, блок 44 управления относительным положением сохраняет информацию о текущем состоянии водительского сиденья 6, обнаруженную посредством блока 41 обнаружения состояния сиденья, в запоминающем устройстве 14 в качестве состояния для автоматического режима вождения.
После чего, когда режим движения переключается с ручного режима вождения на автоматический режим вождения, блок 44 управления относительным положением считывает информацию о состоянии для автоматического режима вождения в запоминающем устройстве 14. Блок 44 управления относительным положением управляет блоком 40 привода актуатора сиденья и, тем самым, регулирует состояние водительского сиденья 6 в считанное состояние для автоматического режима вождения.
[0064] С другой стороны, когда режим движения был переключен с ручного режима вождения на автоматический режим вождения, другими словами, когда режим движения перед переключением был ручным режимом вождения, блок 44 управления относительным положением сохраняет информацию о текущем состоянии водительского сиденья 6, обнаруженном посредством блока 41 обнаружения состояния сиденья, в запоминающем устройстве 14 в качестве состояния для ручного режима вождения.
После чего, когда режим движения переключается с автоматического режима вождения на ручной режим вождения, блок 44 управления относительным положением считывает информацию о состоянии для ручного режима вождения, сохраненную в запоминающем устройстве 14. Блок 44 управления относительным положением управляет блоком 40 привода актуатора сиденья и, тем самым, регулирует состояние водительского сиденья 6 в считанное состояние для ручного режима вождения.
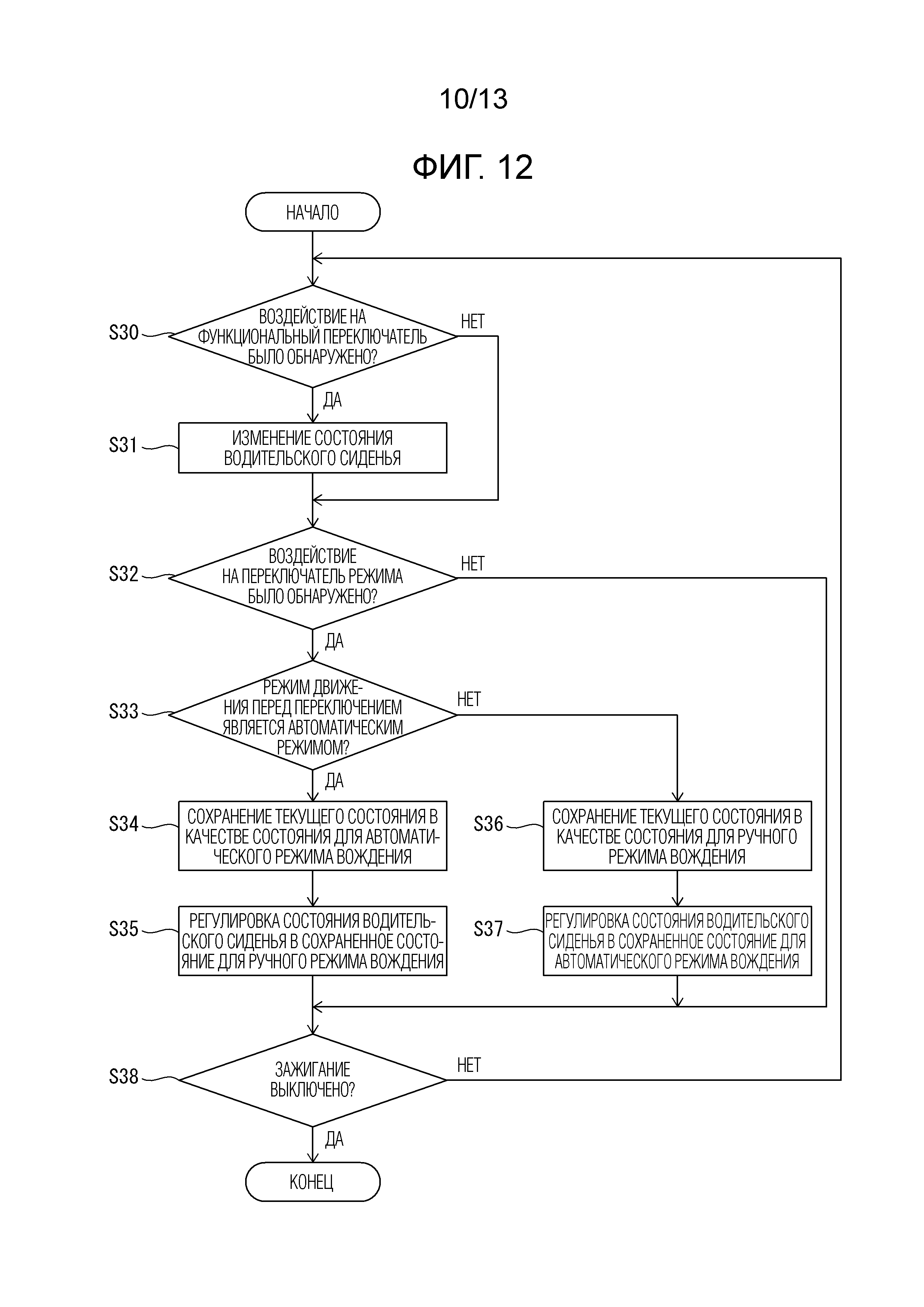
[0065] Далее будет описан пример функционирования функционального устройства 7 для транспортного средства согласно третьему варианту осуществления.
Обратимся теперь к фиг. 12.
На этапе S30 блок 40 привода актуатора сиденья определяет, было или нет обнаружено воздействие на функциональные переключатели 11 водителем для регулировки состояния водительского сиденья 6. Когда воздействие на функциональные переключатели 11 было обнаружено (Y на этапе S30), процесс переходит к этапу S31. Когда воздействие на функциональные переключатели 11 не было обнаружено (N на этапе S30), этап S31 пропускается, и процесс переходит к этапу S32.
На этапе S31 блок 40 привода актуатора сиденья приводит в действие актуаторы 15 сиденья в соответствии с сигналом срабатывания, принятым от функциональных переключателей 11, и, тем самым, изменяет состояние водительского сиденья 6. Затем процесс переходит к этапу S32.
[0066] На этапе S32 блок 44 управления относительным положением определяет, было или нет обнаружено воздействие на переключатель 10 режима водителем для переключения режима движения. Когда воздействие на переключатель 10 режима было обнаружено (Y на этапе S32), процесс переходит к этапу S33. Когда воздействие на переключатель 10 режима не было обнаружено (N на этапе S32), процесс переходит к этапу S38.
[0067] На этапе S33 блок 44 управления относительным положением определяет, является или нет режим движения перед переключением автоматическим режимом вождения. Когда режим движения перед переключением является автоматическим режимом вождения (Y на этапе S33), процесс переходит к этапу S34. Когда режим движения перед переключением не является автоматическим режимом вождения, т.е., когда режим движения перед переключением является ручным режимом вождения (N на этапе S33), процесс переходит к этапу S36.
[0068] На этапе S34 блок 44 управления относительным положением сохраняет информацию о текущем состоянии водительского сиденья 6, обнаруженную посредством блока 41 обнаружения состояния сиденья, в запоминающем устройстве 14 в качестве состояния для автоматического режима вождения.
На этапе S35 блок 44 управления относительным положением управляет блоком 40 привода актуатора сиденья и, тем самым, регулирует состояние водительского сиденья 6 в состояние для ручного режима вождения, сохраненное в запоминающем устройстве 14. Схема 4 управления транспортным средством переключает режим движения на ручной режим вождения. Затем процесс переходит к этапу S38.
[0069] На этапе S36 блок 44 управления относительным положением сохраняет информацию о текущем состоянии водительского сиденья 6, обнаруженную посредством блока 41 обнаружения состояния сиденья, в запоминающем устройстве 14 в качестве состояния для ручного режима вождения.
На этапе S37 схема 4 управления транспортным средством переключает режим движения на автоматический режим вождения. Блок 44 управления относительным положением управляет блоком 40 привода актуатора сиденья и, тем самым, регулирует состояние водительского сиденья 6 в состояние для автоматического режима вождения, сохраненное в запоминающем устройстве 14. Затем процесс переходит к этапу S38.
[0070] На этапе S38 определяется, был или нет выключен переключатель зажигания (IGN) транспортного средства 1. Когда переключатель зажигания транспортного средства 1 был выключен (Y на этапе S38), процесс заканчивается. Когда переключатель зажигания транспортного средства 1 не был выключен (N на этапе S38), процесс возвращается к этапу S30.
[0071] (Преимущества третьего варианта осуществления)
(1) Блок 44 управления относительным положением сохраняет состояние водительского сиденья 6, которое включает в себя, по меньшей мере, любое из позиции подушки 6a сиденья или спинки 6b сиденья в продольном направлении, наклона поверхности для сидения подушки 6a сиденья относительно горизонтальной плоскости транспортного средства 1, наклона спинки 6b сиденья относительно вертикального направления транспортного средства 1 и углового положения водительского сиденья 6 относительно направления сверху вниз водительского сиденья 6 в качестве оси вращения, в запоминающем устройстве 14, прежде чем режим движения переключится с ручного режима вождения на автоматический режим вождения.
Когда режим движения переключается с автоматического режима вождения на ручной режим вождения, после того как состояние водительского сиденья 6 было сохранено, блок 44 управления относительным положением регулирует состояние водительского сиденья 6 в состояние, сохраненное в запоминающем устройстве 14.
Когда режим движения переключается на ручной режим вождения, эта конфигурация предоставляет возможность регулировки состояния водительского сиденья 6 в состояние водительского сиденья 6, которое было отрегулировано водителем, когда ручной режим вождения был выбран в прошлый раз, что предоставляет возможность регулировки состояния водительского сиденья 6 в соответствии с предпочтением водителя. Эта возможность позволяет снизить усилия по регулировке сиденья водителем.
[0072] (2) Блок 44 управления относительным положением сохраняет состояние водительского сиденья 6, которое включает в себя, по меньшей мере, любое из позиции подушки 6a сиденья или спинки 6b сиденья в продольном направлении, наклона поверхности для сидения подушки 6a сиденья относительно горизонтальной плоскости транспортного средства 1, наклона спинки 6b сиденья относительно вертикального направления транспортного средства 1 и углового положения водительского сиденья 6 относительно направления сверху вниз водительского сиденья 6 в качестве оси вращения, в запоминающем устройстве 14, прежде чем режим движения переключится с автоматического режима вождения на ручной режим вождения.
Когда режим движения переключается с ручного режима вождения на автоматический режим вождения, после того как состояние водительского сиденья 6 было сохранено, блок 44 управления относительным положением регулирует состояние водительского сиденья 6 в состояние, сохраненное в запоминающем устройстве 14.
Когда режим движения переключается на автоматический режим вождения, эта функция предоставляет возможность регулировки состояния водительского сиденья 6 в состояние водительского сиденья 6, которое было отрегулировано водителем, когда автоматический режим вождения был выбран в прошлый раз, что предоставляет возможность регулировки состояния водительского сиденья 6 в соответствии с предпочтением водителя. Эта возможность позволяет снизить усилия по регулировке сиденья водителем.
[0073] (Четвертый вариант осуществления)
Далее будет описано функциональное устройство 7 для транспортного средства согласно четвертому варианту осуществления. Функциональное устройство 7 для транспортного средства согласно четвертому варианту осуществления регулирует состояние водительского сиденья 6 в ответ на воздействие на функциональные переключатели водителем в каждом из автоматического режима вождения и ручного режима вождения. Функциональное устройство 7 для транспортного средства допускает операцию сохранения состояния отрегулированного водительского сиденья в запоминающем устройстве 14 от водителя.
Операция сохранения состояния водительского сиденья 6 может, например, быть воздействием на переключатель 11d настройки, который был описан со ссылкой на фиг. 2.
[0074] Когда функциональное устройство 7 для транспортного средства принимает воздействие на переключатель 11d настройки, в то время как режим движения является автоматическим режимом вождения, функциональное устройство 7 для транспортного средства сохраняет состояние водительского сиденья 6 во время функционирования в запоминающем устройстве 14 в качестве состояния для автоматического режима вождения. После этого, когда режим движения переключается с ручного режима вождения на автоматический режим вождения, функциональное устройство 7 для транспортного средства регулирует состояние водительского сиденья 6 в сохраненное состояние для автоматического режима вождения.
[0075] Когда функциональное устройство 7 для транспортного средства принимает воздействие на переключатель 11d настройки, в то время как режим движения является ручным режимом вождения, функциональное устройство 7 для транспортного средства сохраняет состояние водительского сиденья 6 во время функционирования в запоминающем устройстве 14 в качестве состояния для ручного режима вождения. После этого, когда режим движения переключается с автоматического режима вождения на ручной режим вождения, функциональное устройство 7 для транспортного средства регулирует состояние водительского сиденья 6 в сохраненное состояние для ручного режима вождения.
Эта конфигурация предоставляет возможность регулировки состояния водительского сиденья 6 в соответствии с предпочтением водителя, когда режим движения переключается. Эта возможность позволяет снизить усилия по регулировке сиденья водителем.
[0076] Обратимся теперь к фиг. 13. Блок 44 управления относительным положением принимает сигнал срабатывания переключателя 11d настройки. Когда переключатель 11d настройки задействуется, в то время как режим движения является автоматическим режимом вождения, блок 44 управления относительным положением сохраняет информацию о состоянии водительского сиденья 6, обнаруженную посредством блока 41 обнаружения состояния сиденья во время функционирования, в запоминающем устройстве 14 в качестве состояния для автоматического режима вождения.
После чего, когда режим движения переключается с ручного режима вождения на автоматический режим вождения, блок 44 управления относительным положением считывает информацию о состоянии для автоматического режима вождения, сохраненную в запоминающем устройстве 14. Блок 44 управления относительным положением управляет блоком 40 привода актуатора сиденья и, тем самым, регулирует состояние водительского сиденья 6 в считанное состояние для автоматического режима вождения.
[0077] С другой стороны, когда переключатель 11d настройки задействуется, в то время как режим движения является ручным режимом вождения, блок 44 управления относительным положением сохраняет информацию о состоянии водительского сиденья 6, обнаруженную посредством блока 41 обнаружения состояния сиденья во время функционирования, в запоминающем устройстве 14 в качестве состояния для ручного режима вождения.
После чего, когда режим движения переключается с автоматического режима вождения на ручной режим вождения, блок 44 управления относительным положением считывает информацию о состоянии для ручного режима вождения, сохраненную в запоминающем устройстве 14. Блок 44 управления относительным положением управляет блоком 40 привода актуатора сиденья и, тем самым, регулирует состояние водительского сиденья 6 в считанное состояние для ручного режима вождения.
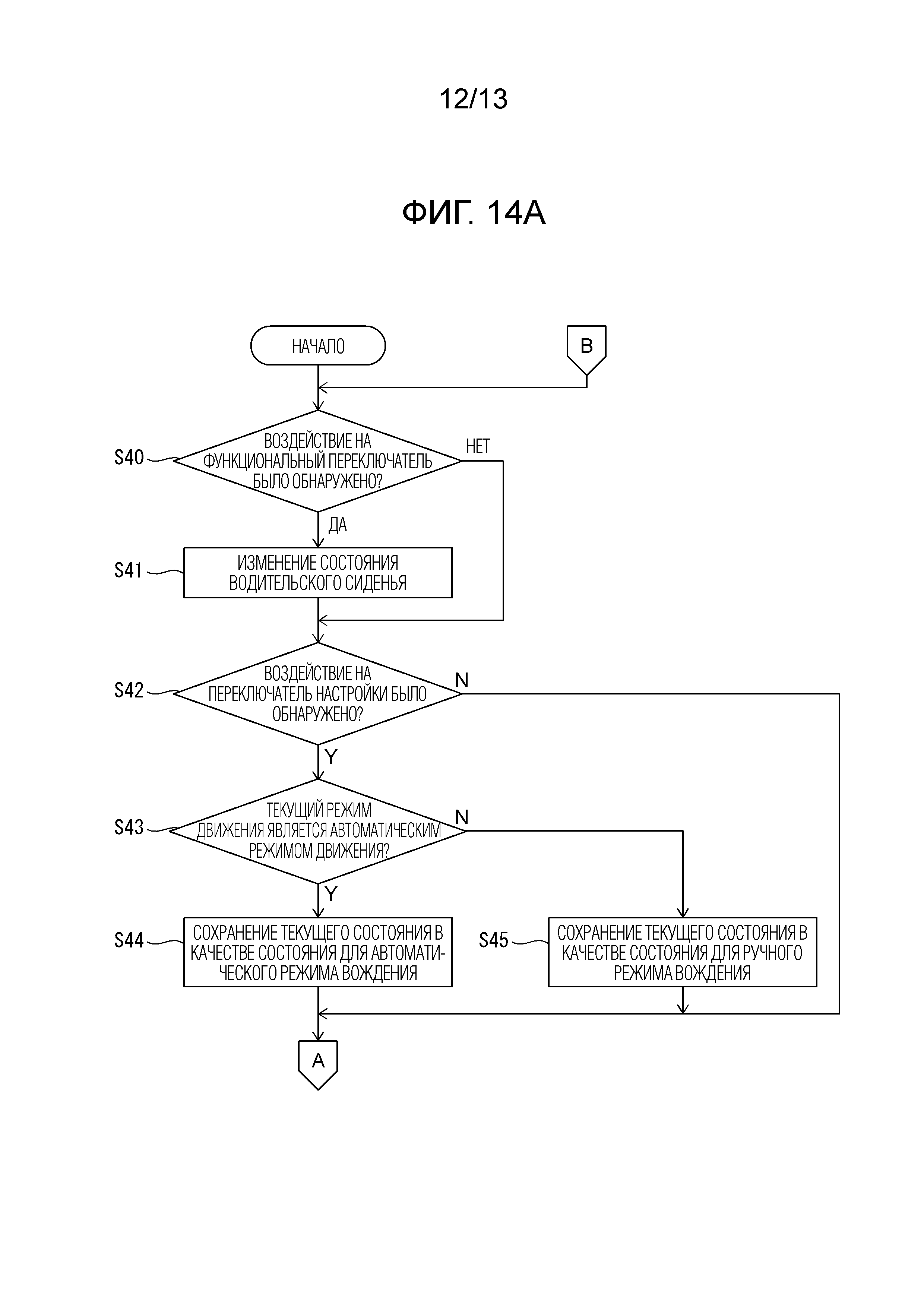
[0078] Далее будет описан пример функционирования функционального устройства 7 для транспортного средства согласно четвертому варианту осуществления.
Обратимся теперь к фиг. 14A и 14B.
На этапе S40 блок 40 привода актуатора сиденья определяет, было или нет обнаружено воздействие на функциональные переключатели 11 водителем для регулировки состояния водительского сиденья 6. Когда воздействие на функциональные переключатели 11 было обнаружено (Y на этапе S40), процесс переходит к этапу S41. Когда воздействие на функциональные переключатели 11 не было обнаружено (N на этапе S40), этап S41 пропускается, и процесс переходит к этапу S42.
На этапе S41 блок 40 привода актуатора сиденья приводит в действие актуаторы 15 сиденья в соответствии с сигналом срабатывания, принятым от функциональных переключателей 11, и, тем самым, изменяет состояние водительского сиденья 6. Затем процесс переходит к этапу S42.
[0079] На этапе S42 блок 44 управления относительным положением определяет, было или нет обнаружено воздействие на переключатель 11d настройки. Когда воздействие на переключатель 11d настройки было обнаружено (Y на этапе S42), процесс переходит к этапу S43. Когда воздействие на переключатель 11d настройки не было обнаружено (N на этапе S42), процесс переходит к этапу S46.
На этапе S43 блок 44 управления относительным положением определяет, является или нет текущий режим движения автоматическим режимом вождения. Когда текущий режим движения является автоматическим режимом вождения (Y на этапе S43), процесс переходит к этапу S44. Когда текущий режим движения не является автоматическим режимом вождения, т.е., когда режим движения является ручным режимом вождения (N на этапе S43), процесс переходит к этапу S45.
[0080] На этапе S44 блок 44 управления относительным положением сохраняет информацию о текущем состоянии водительского сиденья 6, обнаруженную посредством блока 41 обнаружения состояния сиденья, в запоминающем устройстве 14 в качестве состояния для автоматического режима вождения. Затем процесс переходит к этапу S46.
На этапе S45 блок 44 управления относительным положением сохраняет информацию о текущем состоянии водительского сиденья 6, обнаруженную посредством блока 41 обнаружения состояния сиденья, в запоминающем устройстве 14 в качестве состояния для ручного режима вождения. Затем процесс переходит к этапу S46.
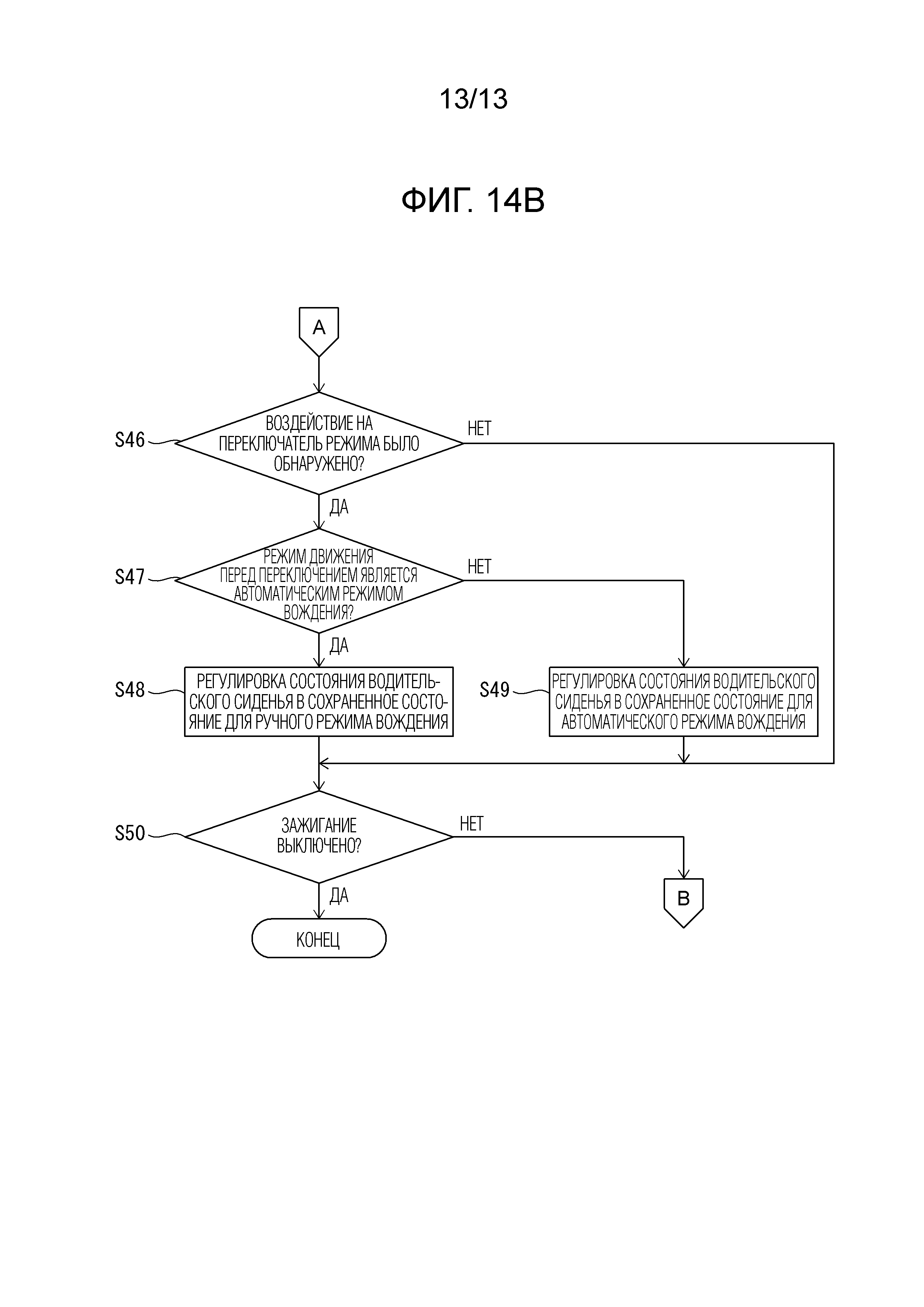
[0081] На этапе S46 блок 44 управления относительным положением определяет, было или нет обнаружено воздействие на переключатель 10 режима водителем для переключения режима движения. Когда воздействие на переключатель 10 режима было обнаружено (Y на этапе S46), процесс переходит к этапу S47. Когда воздействие на переключатель 10 режима не было обнаружено (N на этапе S46), процесс переходит к этапу S50.
На этапе S47 блок 44 управления относительным положением определяет, является или нет режим движения перед переключением автоматическим режимом вождения. Когда режим движения перед переключением является автоматическим режимом вождения (Y на этапе S47), процесс переходит к этапу S48. Когда режим движения перед переключением не является автоматическим режимом вождения, т.е., когда режим движения перед переключением является ручным режимом вождения (N на этапе S47), процесс переходит к этапу S49.
[0082] На этапе S48 блок 44 управления относительным положением управляет блоком 40 привода актуатора сиденья и, тем самым, регулирует состояние водительского сиденья 6 в состояние для ручного режима вождения, сохраненное в запоминающем устройстве 14. Схема 4 управления транспортным средством переключает режим движения на ручной режим вождения. Затем процесс переходит к этапу S50.
На этапе S49 схема 4 управления транспортным средством переключает режим движения на автоматический режим вождения. Блок 44 управления относительным положением управляет блоком 40 привода актуатора сиденья и, тем самым, регулирует состояние водительского сиденья 6 в состояние для автоматического режима вождения, сохраненное в запоминающем устройстве 14. Затем процесс переходит к этапу S50.
[0083] На этапе S50 определяется, был или нет выключен переключатель зажигания транспортного средства 1. Когда переключатель зажигания транспортного средства 1 был выключен (Y на этапе S50), процесс заканчивается. Когда переключатель зажигания транспортного средства 1 не был выключен (N на этапе S50), процесс возвращается к этапу S40.
[0084] (Преимущества четвертого варианта осуществления)
(1) Блок 40 привода актуатора сиденья регулирует состояние водительского сиденья 6, которое включает в себя, по меньшей мере, любое из позиции подушки 6a сиденья или спинки 6b сиденья в продольном направлении, наклона поверхности для сидения подушки 6a сиденья относительно горизонтальной плоскости транспортного средства 1, наклона спинки 6b сиденья относительно вертикального направления транспортного средства 1 и углового положения водительского сиденья 6 относительно направления сверху вниз водительского сиденья 6 в качестве оси вращения, в ответ на инструкцию от водителя, когда режим движения является автоматическим режимом вождения.
Блок 44 управления относительным положением сохраняет состояние водительского сиденья 6, которое было отрегулировано в ответ на инструкцию от водителя, в запоминающем устройстве 14 в ответ на действие водителя.
Когда режим движения переключается с ручного режима вождения на автоматический режим вождения, после того как состояние водительского сиденья 6 было сохранено, блок 44 управления относительным положением регулирует состояние водительского сиденья 6 в состояние, сохраненное в запоминающем устройстве 14.
Эта операция предоставляет возможность регулировки состояния водительского сиденья 6 в соответствии с предпочтением водителя, когда режим движения переключается на автоматический режим вождения. Эта возможность позволяет снизить усилия по регулировке сиденья водителем.
[0085] (2) Блок 40 привода актуатора сиденья регулирует состояние водительского сиденья 6, которое включает в себя, по меньшей мере, любое из позиции подушки 6a сиденья или спинки 6b сиденья в продольном направлении, наклона поверхности для сидения подушки 6a сиденья относительно горизонтальной плоскости транспортного средства 1, наклона спинки 6b сиденья относительно вертикального направления транспортного средства 1 и углового положения водительского сиденья 6 относительно направления сверху вниз водительского сиденья 6 в качестве оси вращения, в ответ на инструкцию от водителя, когда режим движения является ручным режимом вождения.
Блок 44 управления относительным положением сохраняет состояние водительского сиденья 6, которое было отрегулировано в ответ на инструкцию от водителя, в запоминающем устройстве 14 в ответ на действие водителя.
Когда режим движения переключается с автоматического режима вождения на ручной режим вождения, после того как состояние водительского сиденья 6 было сохранено, блок 44 управления относительным положением регулирует состояние водительского сиденья 6 в состояние, сохраненное в запоминающем устройстве 14.
Эта операция предоставляет возможность регулировки состояния водительского сиденья 6 в соответствии с предпочтением водителя, когда режим движения переключается на ручной режим вождения. Эта возможность позволяет снизить усилия по регулировке сиденья водителем.
[0086] Все примеры и условный язык, предоставленные в данном документе, служат в педагогических целях для помощи читателю в понимании изобретения и принципов, вносимых автором изобретения в область техники, и не должны истолковываться в качестве ограничений на такие конкретно изложенные примеры и условия, и также организация таких примеров в описании изобретения не связана с демонстрацией преимуществ и недостатков изобретения. Хотя выше подробно описаны один или более вариантов осуществления настоящего изобретения, следует понимать, что различные изменения, замены и модификации могут вноситься в них без отступления от сущности и объема изобретения.
Список номеров ссылок
[0087] 1 Транспортное средство
2 Датчик обнаружения ситуации
3 Датчик состояния транспортного средства
4 Схема управления транспортным средством
5 Управляющий актуатор транспортного средства
6 Водительское сиденье
6a Подушка сиденья
6b Спинка сиденья
6c Подлокотник
7 Функциональное устройство для транспортного средства
10 Переключатель режима
11 Функциональный переключатель
12 Контроллер
13 Процессор
14 Запоминающее устройство
15 Актуатор сиденья
16 Актуатор переключателя
17 Камера наблюдения
18 Датчик давления тела
20 Рулевое колесо
21 Боковая консоль
22 Центральная консоль
23 Передняя панель
40 Блок привода актуатора сиденья
41 Блок обнаружения состояния сиденья
42 Блок обнаружения сидячего положения
43 Блок обнаружения позиции переключателя
44 Блок управления относительным положением
45 База данных
46 Блок привода актуатора переключателя
Реферат
Изобретение относится к способу регулировки позиции переключателя и функциональному устройству для транспортного средства. Способ регулировки позиции переключателя заключается в переключении режима движения транспортного средства между автоматическим режимом вождения, в котором движение транспортного средства управляется автоматическим образом, и ручным режимом вождения, в котором движение транспортного средства управляется водителем. Позиция переключателя режима регулируется согласно состоянию водительского сиденья, посредством приема инструкции для водительского сиденья от водителя, когда режим движения является автоматическим режимом вождения, и регулировки позиции переключателя режима согласно инструкции. Повышается безопасность при эксплуатации. 2 н. и 14 з.п. ф-лы, 15 ил.
Комментарии